l ocating in f ingerprint s pace : w ireless i ndoor localization with l ittle h uman i ntervention...
TRANSCRIPT

LOCATING IN FINGERPRINT SPACE:WIRELESS INDOOR LOCALIZATION WITH LITTLE HUMAN INTERVENTION
Zheng Yang, Chenshu Wu, and Yunhao Liu
MobiCom 2012
- Sowhat 2012.08.20
OUTLINE Introduction
System Design
Evaluation
Discussion
Conclusion
OUTLINE Introduction
System Design
Evaluation
Discussion
Conclusion
MOTIVATION
RSSI fingerprinting-based localization
Site survey Time-consuming Labor-intensive Vulnerable to environmental dynamics Inevitable
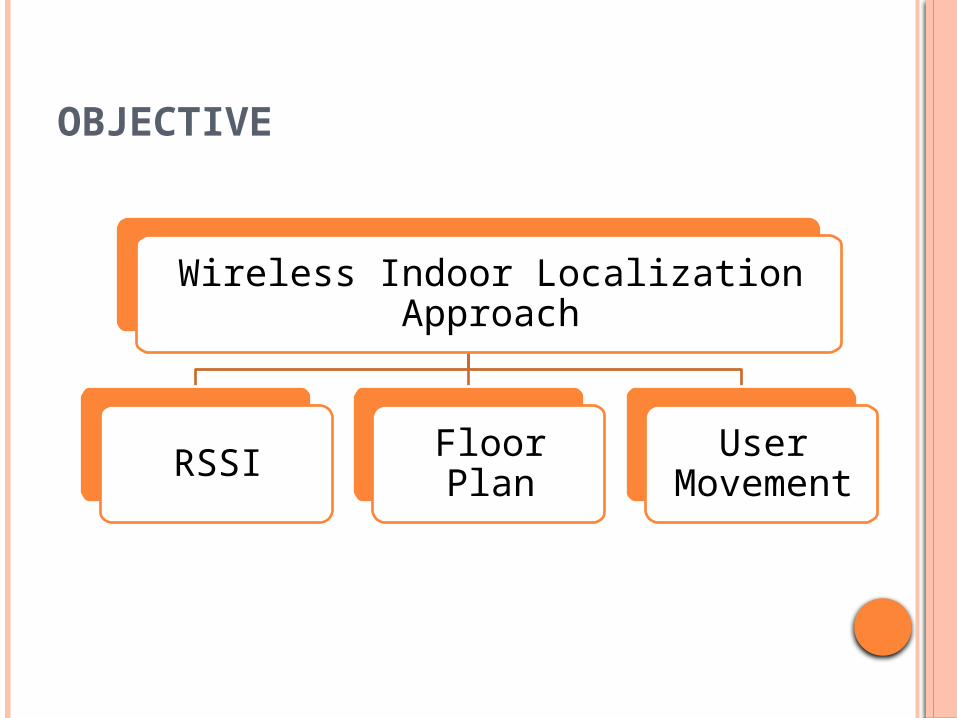
OBJECTIVE
Wireless Indoor Localization Approach
RSSI Floor Plan User Movement
OUTLINE Introduction
System Design
Evaluation
Discussion
Conclusion

LIFS, SYSTEM ARCHITECTUREGeographical
dist.≠
Walking dist.
RSSI + Distance
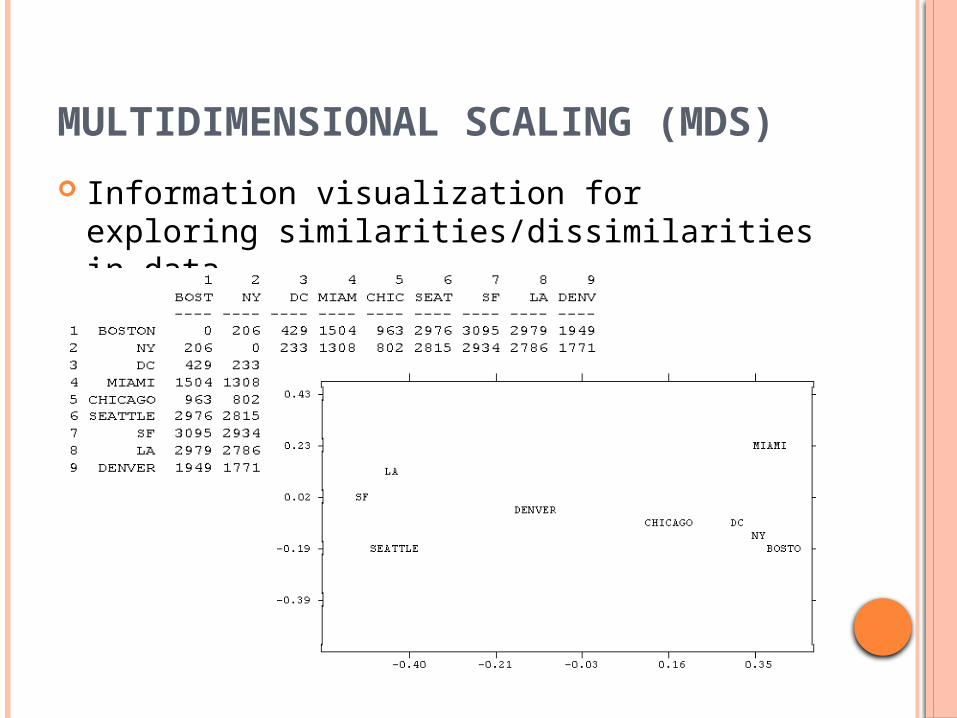
MULTIDIMENSIONAL SCALING (MDS)
Information visualization for exploring similarities/dissimilarities in data
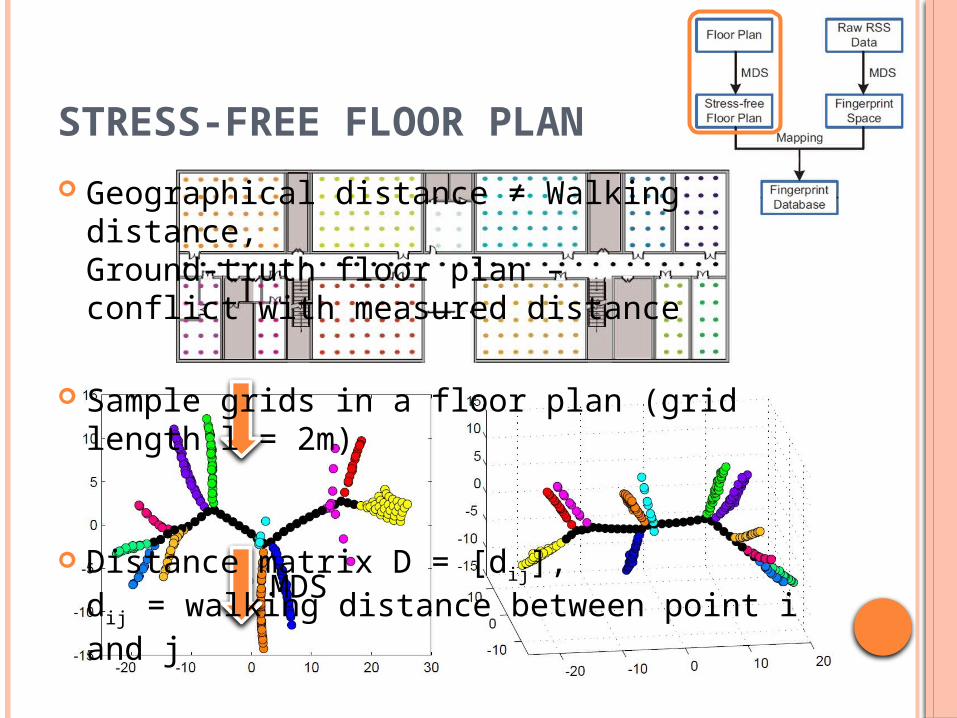
STRESS-FREE FLOOR PLAN
MDS
Geographical distance ≠ Walking distance,Ground-truth floor plan –conflict with measured distance
Sample grids in a floor plan (grid length l = 2m)
Distance matrix D = [dij],dij = walking distance between point i and j
Stress-free floor plan – 2D & 3D
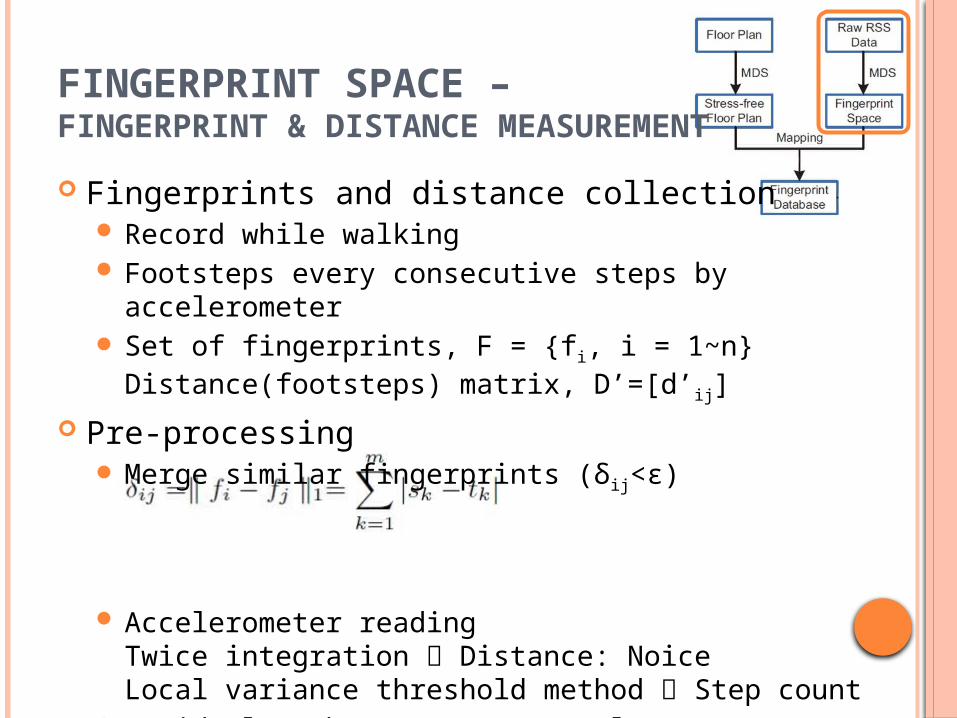
FINGERPRINT SPACE – FINGERPRINT & DISTANCE MEASUREMENT
Fingerprints and distance collection Record while walking Footsteps every consecutive steps by accelerometer Set of fingerprints, F = {fi, i = 1~n}
Distance(footsteps) matrix, D’=[d’ij]
Pre-processing Merge similar fingerprints (δij<ε)
Accelerometer readingTwice integration Distance: NoiceLocal variance threshold method Step count
Stride lengths vary? MDS tolerate measurement errors

FINGERPRINT SPACE – FINGERPRINT SPACE CONSTRUCTION
Adequate fingerprints & distance1. 10x sample locations in stress-free floor plan2. First several days for training
d’ij unavailable d’ij = d’ik + d’kj
Shortest path update D’ all-pairs of fingerprints Floyd-Warshall algorithm
MDS Fingerprint space 2D & 3D
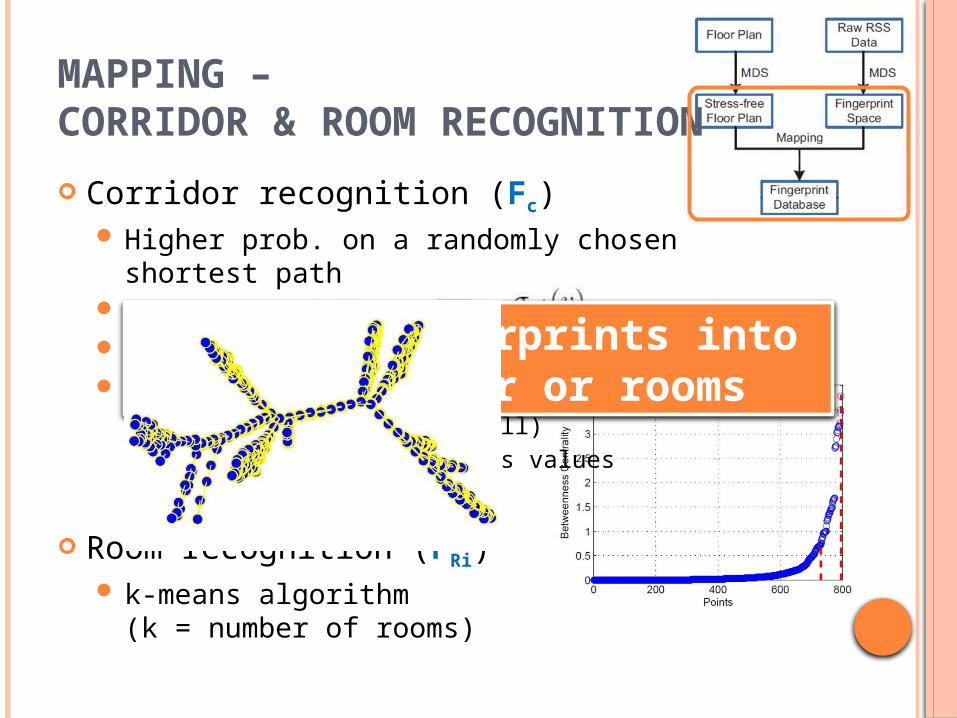
MAPPING –CORRIDOR & ROOM RECOGNITION
Corridor recognition (Fc) Higher prob. on a randomly chosen shortest path Minimum spanning tree Betweenness Watershed
1. Size(corridor) / Size(all)2. Large gap of betweenness values
Room recognition (FRi) k-means algorithm
(k = number of rooms)
Classify fingerprints into the corridor or rooms

Fingerprints collected near “doors”
PD = {p1, p2, …, pk}, stress-free floor planFD , fingerprint space
distance matrix D and D’ l = (lp1, lp2, …, lp k-1)l’ = (lf1, l’f2, …, l’f k-1)
cosine similarity
MAPPING –REFERENCE POINT
Near-door fingerprints, FD,labeled with real locations
1. Map near-door fingerprintsto real locations (FD → PD)
2. Map rooms to rooms
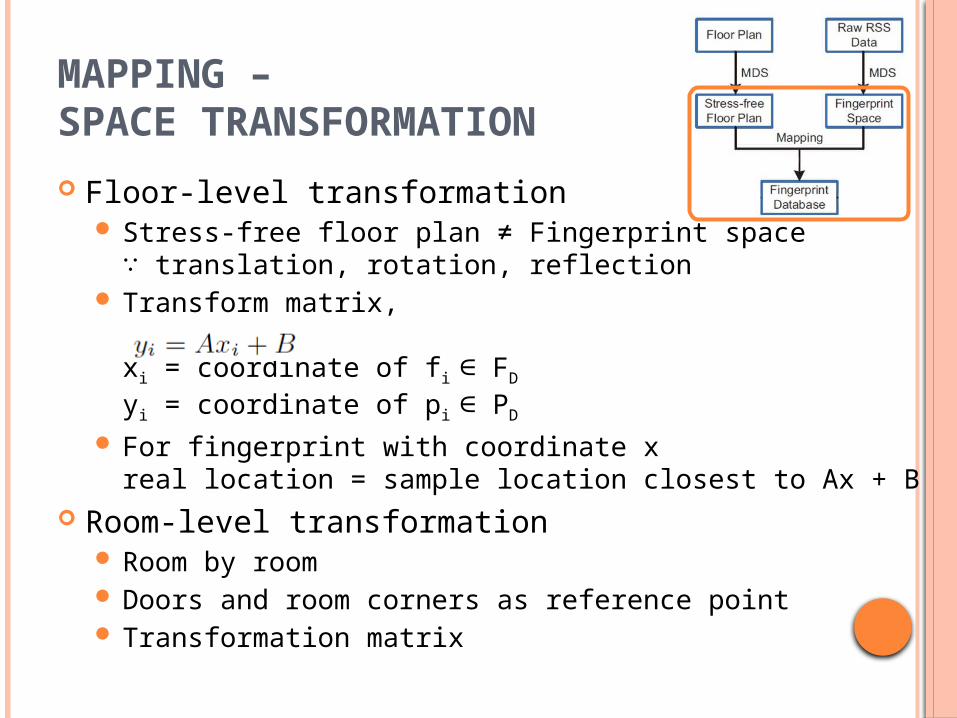
Floor-level transformation Stress-free floor plan ≠ Fingerprint space
∵ translation, rotation, reflection Transform matrix,
xi = coordinate of fi ∈ FD
yi = coordinate of pi ∈ PD
For fingerprint with coordinate xreal location = sample location closest to Ax + B
Room-level transformation Room by room Doors and room corners as reference point Transformation matrix
MAPPING –SPACE TRANSFORMATION
OUTLINE Introduction
System Design
Evaluation
Discussion
Conclusion
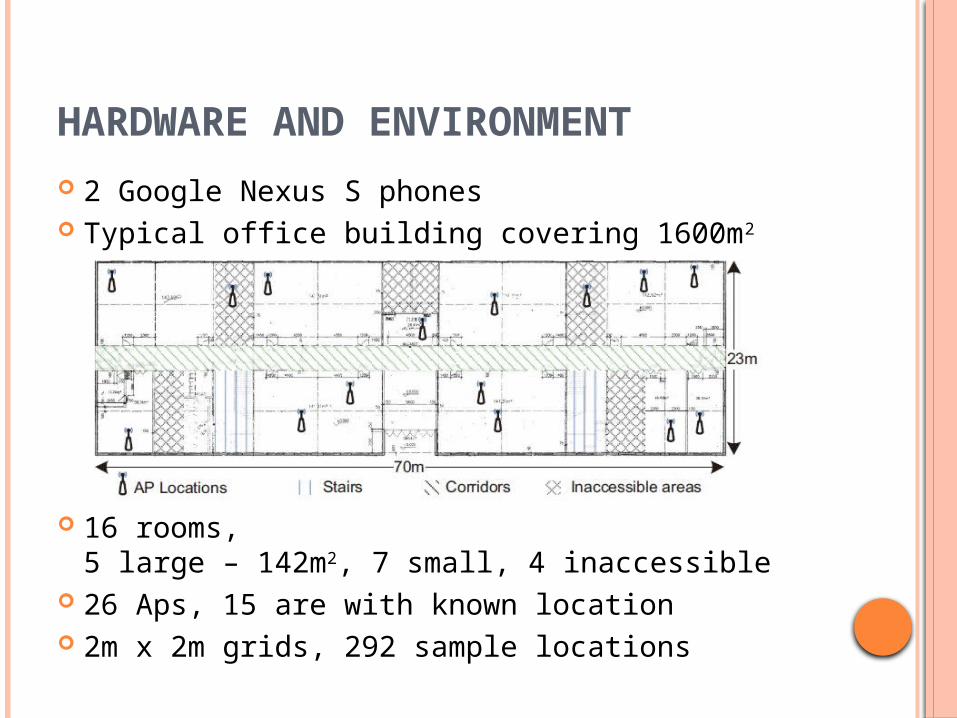
HARDWARE AND ENVIRONMENT
2 Google Nexus S phones Typical office building covering 1600m2
16 rooms,5 large – 142m2, 7 small, 4 inaccessible
26 Aps, 15 are with known location 2m x 2m grids, 292 sample locations

EXPERIMENT DESIGN
5 hours with 4 volunteers Fingerprints recording – every 4~5 steps
(2~3m) Accelerometer –
work in different frequency based on detecting movement
600 user traces, with 16498 fingerprints Corridor, >500 paths
Small rooms, >5 pathsLarge rooms, >10 paths
Half of data used for training,half …………………... in operating phase
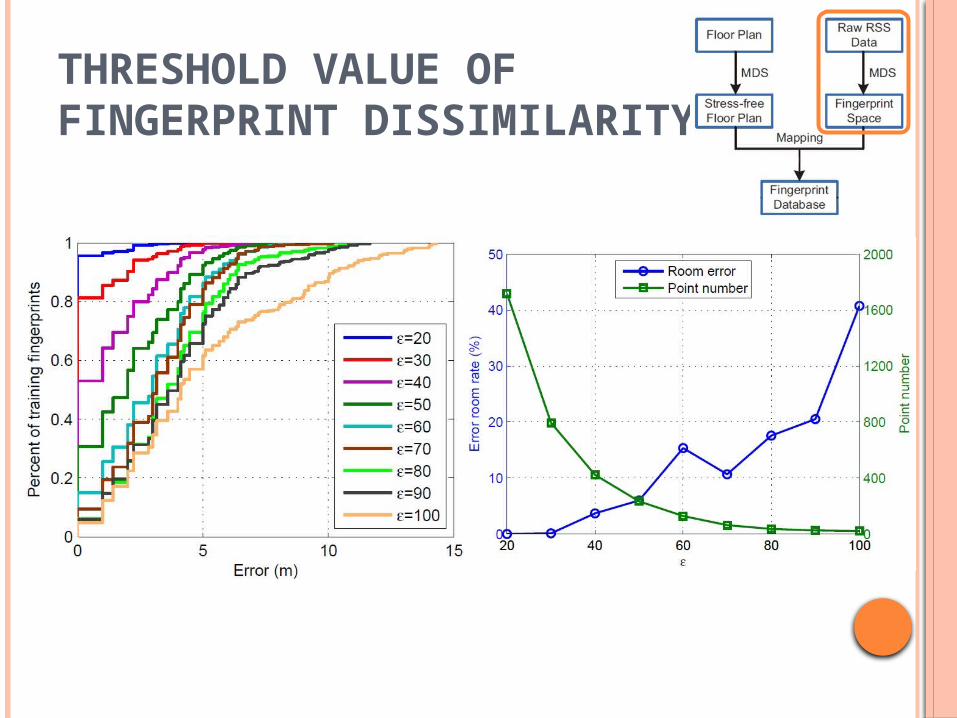
THRESHOLD VALUE OF FINGERPRINT DISSIMILARITY
STEP COUNT 5 ~ 200 footsteps
Error rate = 2% in number of detected steps
Accumulative error of long path Unobvious performance drop ∵ only use inter-fingerprint step counts
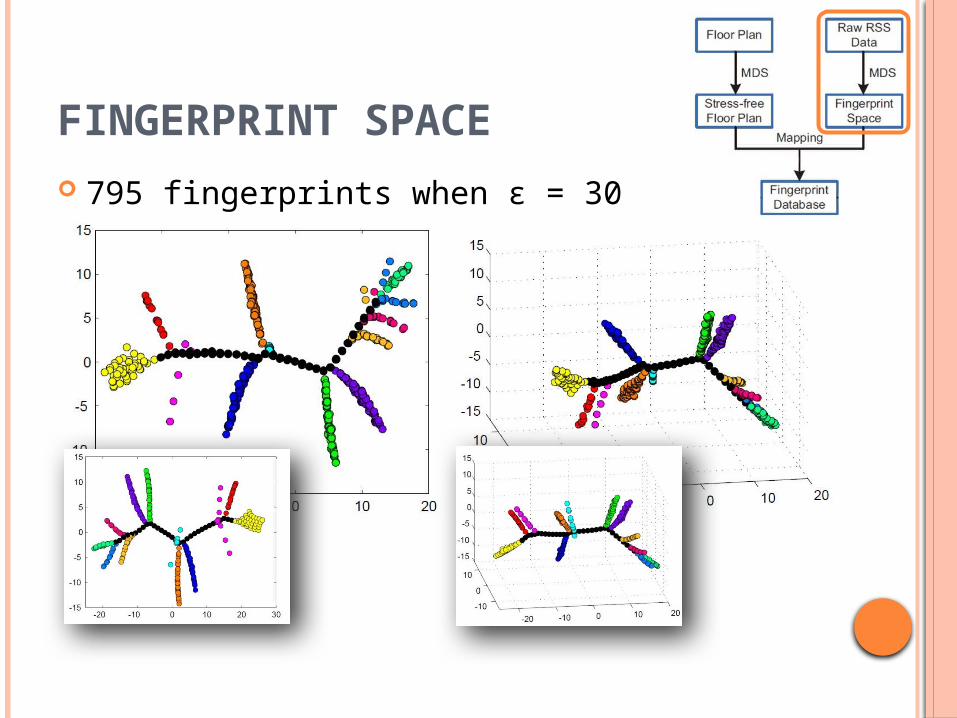
FINGERPRINT SPACE 795 fingerprints when ε = 30
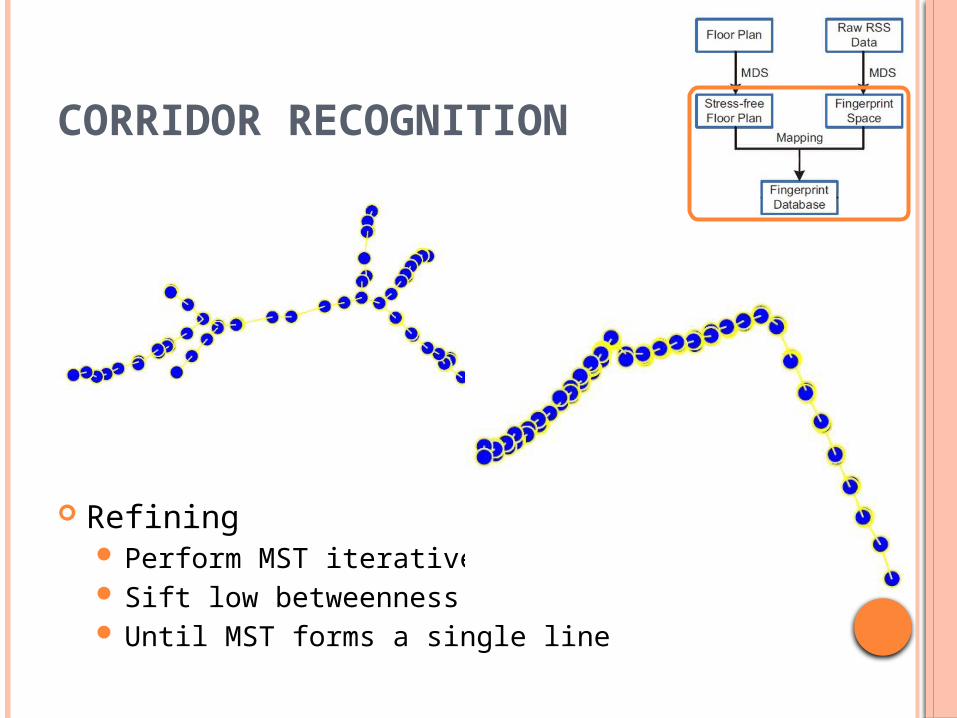
CORRIDOR RECOGNITION
Refining Perform MST iteratively Sift low betweenness Until MST forms a single line

ROOM RECOGNITION
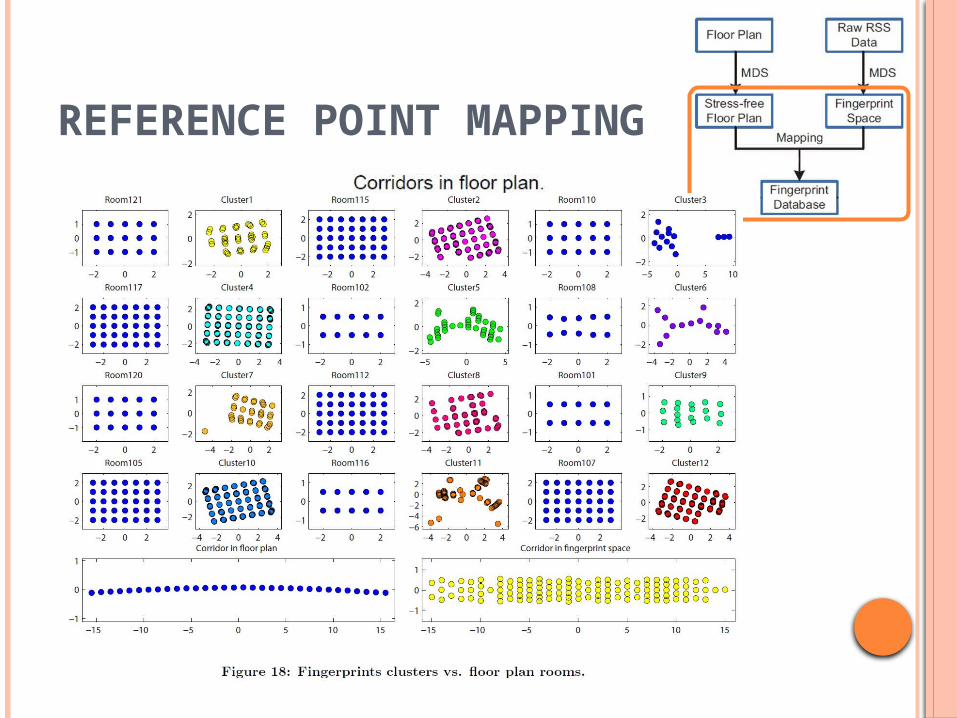
REFERENCE POINT MAPPING
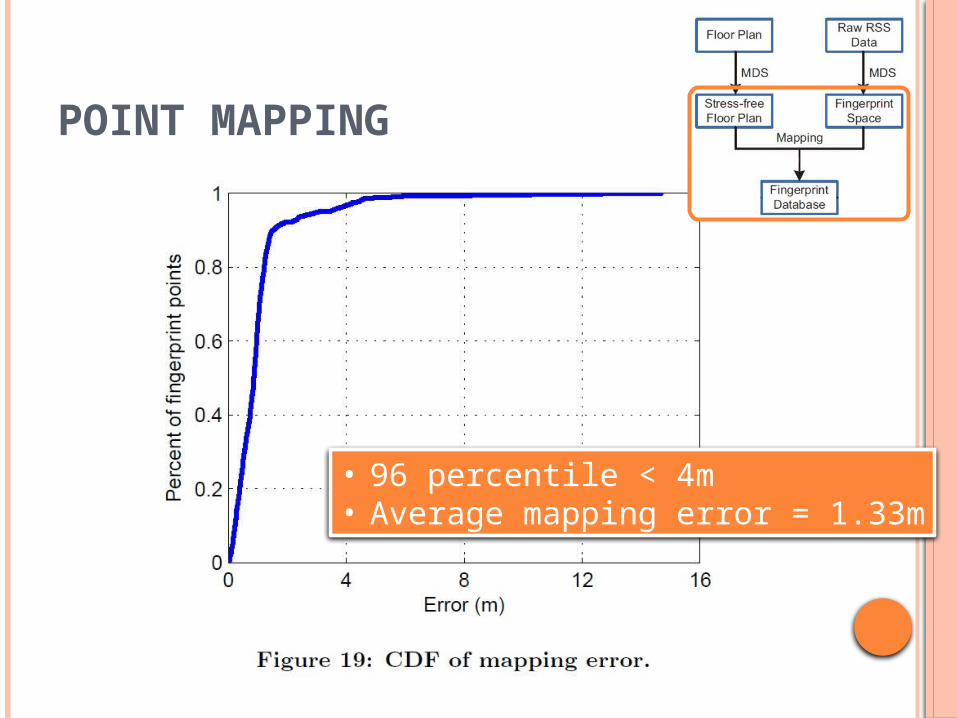
POINT MAPPING
• 96 percentile < 4m• Average mapping error = 1.33m
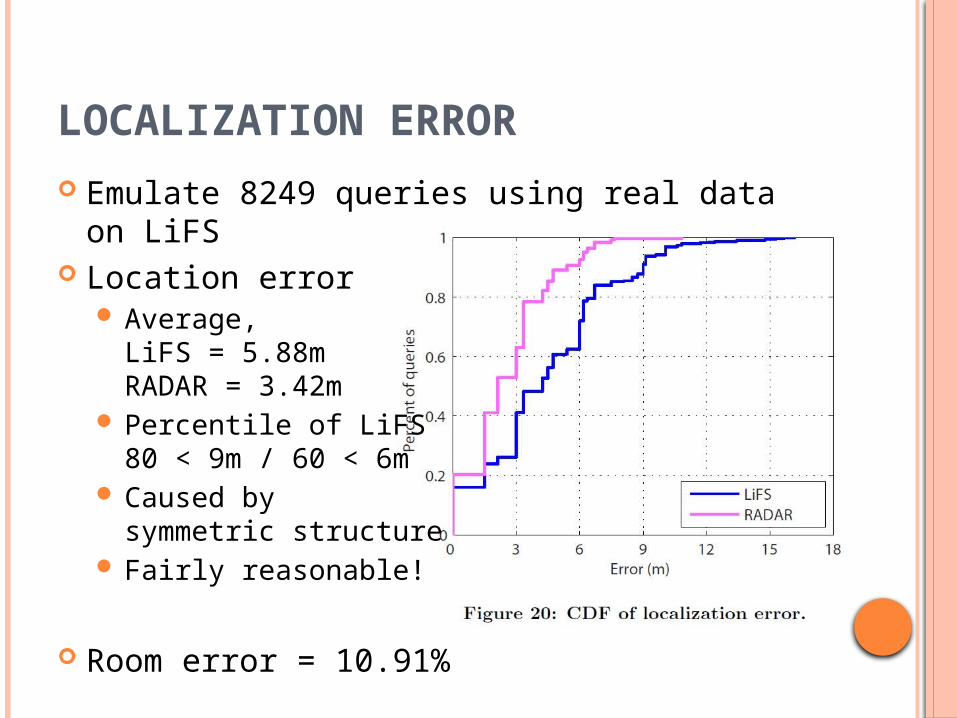
LOCALIZATION ERROR Emulate 8249 queries using real data on LiFS Location error
Average,LiFS = 5.88mRADAR = 3.42m
Percentile of LiFS80 < 9m / 60 < 6m
Caused bysymmetric structure
Fairly reasonable!
Room error = 10.91%

OUTLINE Introduction
System Design
Evaluation
Discussion
Conclusion
DISCUSSION
Global reference point Last reported GPS location
Locations of APsSimilar surrounding sound signature…
Could be added in LiFS for more robust mapping Key for symmetric floor plans / multi-floor fuildings
Large open environment

OUTLINE Introduction
System Design
Evaluation
Discussion
Conclusion
CONCLUSION
LiFS Spatial relation of RSSI fingerprints + Floor plan Low human cost
Comments Clear architecture Not specific descriptions in evaluation

THANKS FOR LISTENING ~