maria pacana
DESCRIPTION
Using an Electromagnetic and Acoustic Sensing Device to Determine Direction and Range Part of the Intelligent Ground Vehicle Project. Maria Pacana. Objective. - PowerPoint PPT PresentationTRANSCRIPT
Using an Electromagnetic and Acoustic Sensing Device to
Determine Direction and Range Part of the Intelligent Ground
Vehicle ProjectMaria Pacana
Objective
• The implementation of an electromagnetic and acoustic sensing device that determines range and direction to enable one autonomous vehicle to follow another.

Sensing array:
• PIC-C microcontroller
• Radio transmitter
• Radio receiver
• Sonar transmitters and receivers

Sonar and Radio Transmitters
• Sonar and radio transmitted together
• Controlled by an LMC 555 CMOS
Timer at 1.66 Hz
• Rolling code radio transmitter, hard
to electronically ‘crack’.

The Radio And Sonar Receivers
• The sonar receiver must transmit in order to receive.
• When the radio receiver gets a signal, it initializes the sonar and enables it to receive.
The Radio and Sonar Recievers
•The sonar receiver must transmit in order to receive
•When the radio receiver gets a signal, it initializes the sonar and enables it to receive.

RADIO XMIT
ACOUSTIC XMIT
RADIO RCVR
BINAURAL SENSOR
TIMER
Diagram of Sensing Array
PIC -C
MCU
SPEED OF LIGHT
SPEED OF SOUND
. . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . .
How It Works:
• The radio receiver gets the electromagnetic part of the signal at the speed of light.
• The sonar receiver gets the acoustic part of the signal at the speed of sound.
• The difference between the electromagnetic and acoustic signals indicates range.
• The difference between each ‘ear’ of the binaural receivers indicates direction.

RADIO RCVR
LEFT ‘EAR’
RIGHT ‘EAR’
T = 0
Diagram of the Signals
TIMEtElapsed = 20 ms

Navigation
• To test this system, the receivers were mounted on an autonomous mobile robot and connected to a PIC-C microcontroller.
• The robot takes the difference in readings between each ear of the binaural sonar receivers in order to correct itself.
• The greater the difference, the more the robot ‘corrects.’
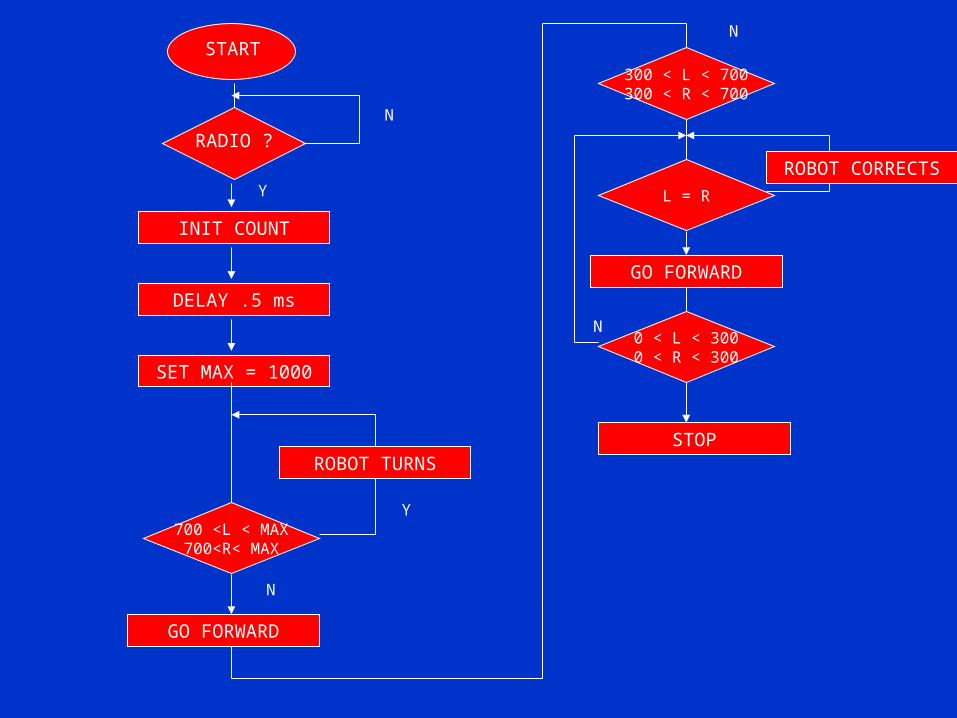
START
RADIO ?
INIT COUNT
DELAY .5 ms
SET MAX = 1000
Y
N
700 <L < MAX700<R< MAX
ROBOT TURNS
300 < L < 700300 < R < 700
L = R
0 < L < 3000 < R < 300
GO FORWARD
N
STOP
N
GO FORWARD
Y
N
ROBOT CORRECTS

Advantages and Disadvantages
• Is not affected by sunlight
• Has more range, less resolution than IR
• The 400 V excitation pulse that switches the sonar on and off can cause electrical noise in other circuits
• ‘Echoes’ from the receiver

Thanks to:
• Professor Roman Kuc
• Ed Jackson
• The Intelligent Ground Vehicle Team