maximum likelihood multipath estimation in comparison · pdf filemaximum likelihood multipath...
TRANSCRIPT
Slide 1
ION GNSS, Fort Worth, Texas, September 28, 2006
Maximum Likelihood Multipath Estimationin Comparison with Conventional Delay Lock Loops
Michael Lentmaier, Bernhard KrachGerman Aerospace Center (DLR)
ION GNSS, Fort Worth, Texas, September 28, 2006Slide 2
Outline
Multipath signal model and maximum-likelihood delay estimator
Methods for efficient implementation- data size reduction- interpolation techniques - Newton optimization
Integration of the ML estimator into receiver tracking loop:- comparison with conventional DLL (narrow correlator)- ML estimator in absence of multipath- ML estimator in presence of multipath
ION GNSS, Fort Worth, Texas, September 28, 2006Slide 3
The Effect of Multipath
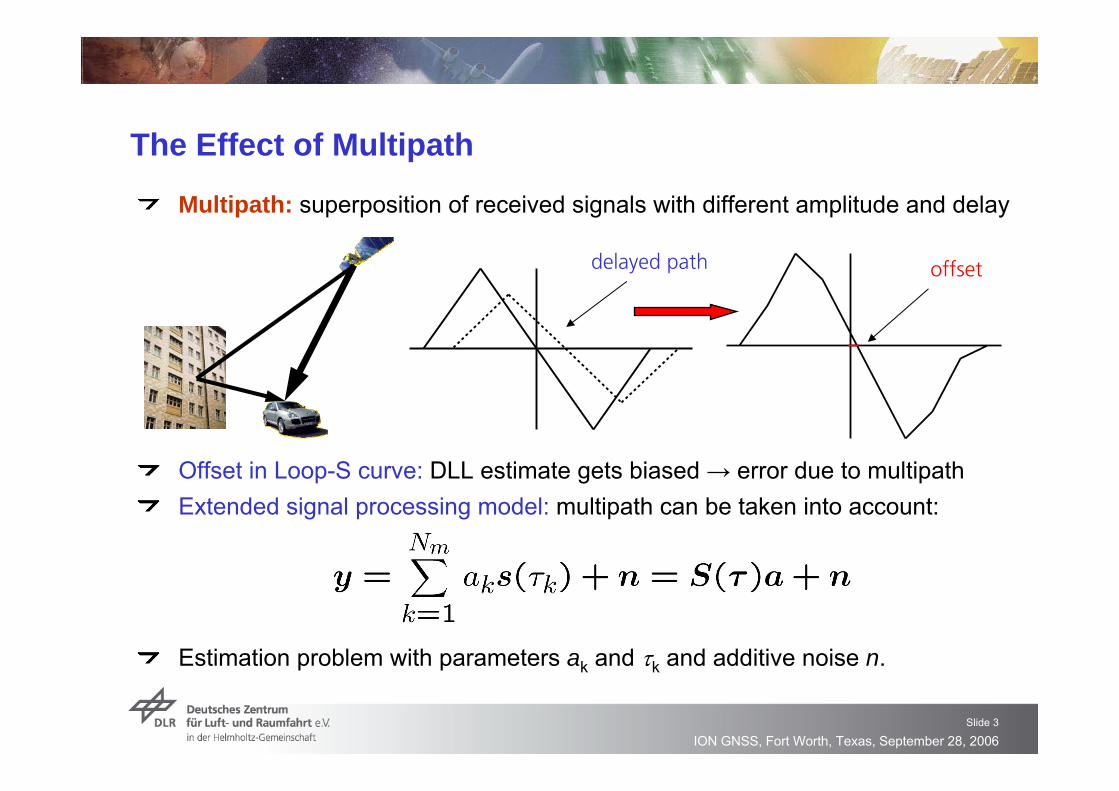
Multipath: superposition of received signals with different amplitude and delay
Offset in Loop-S curve: DLL estimate gets biased → error due to multipathExtended signal processing model: multipath can be taken into account:
Estimation problem with parameters ak and τk and additive noise n.
delayed path offset
ION GNSS, Fort Worth, Texas, September 28, 2006Slide 4
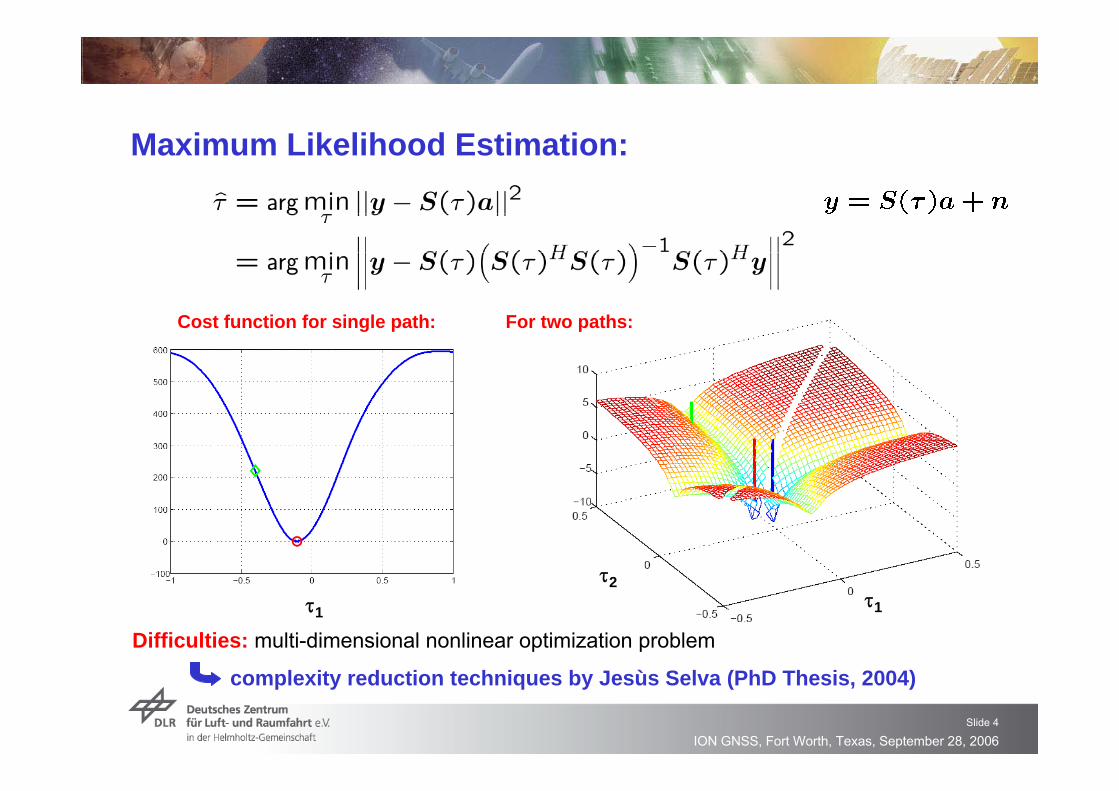
For two paths:Cost function for single path:
Maximum Likelihood Estimation:
τ1τ1
τ2
Difficulties: multi-dimensional nonlinear optimization problem
complexity reduction techniques by Jesùs Selva (PhD Thesis, 2004)
ION GNSS, Fort Worth, Texas, September 28, 2006Slide 5
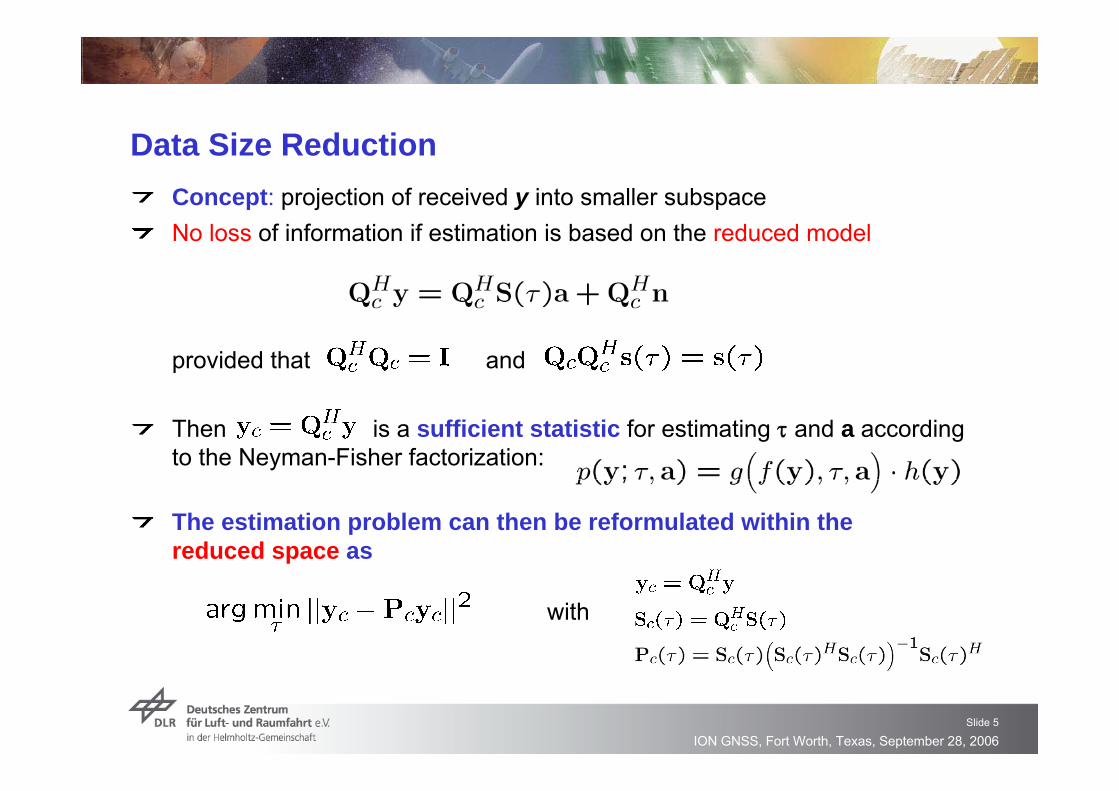
Data Size ReductionConcept: projection of received y into smaller subspaceNo loss of information if estimation is based on the reduced model
provided that and
Then is a sufficient statistic for estimating τ and a according to the Neyman-Fisher factorization:
The estimation problem can then be reformulated within thereduced space as
with
ION GNSS, Fort Worth, Texas, September 28, 2006Slide 6
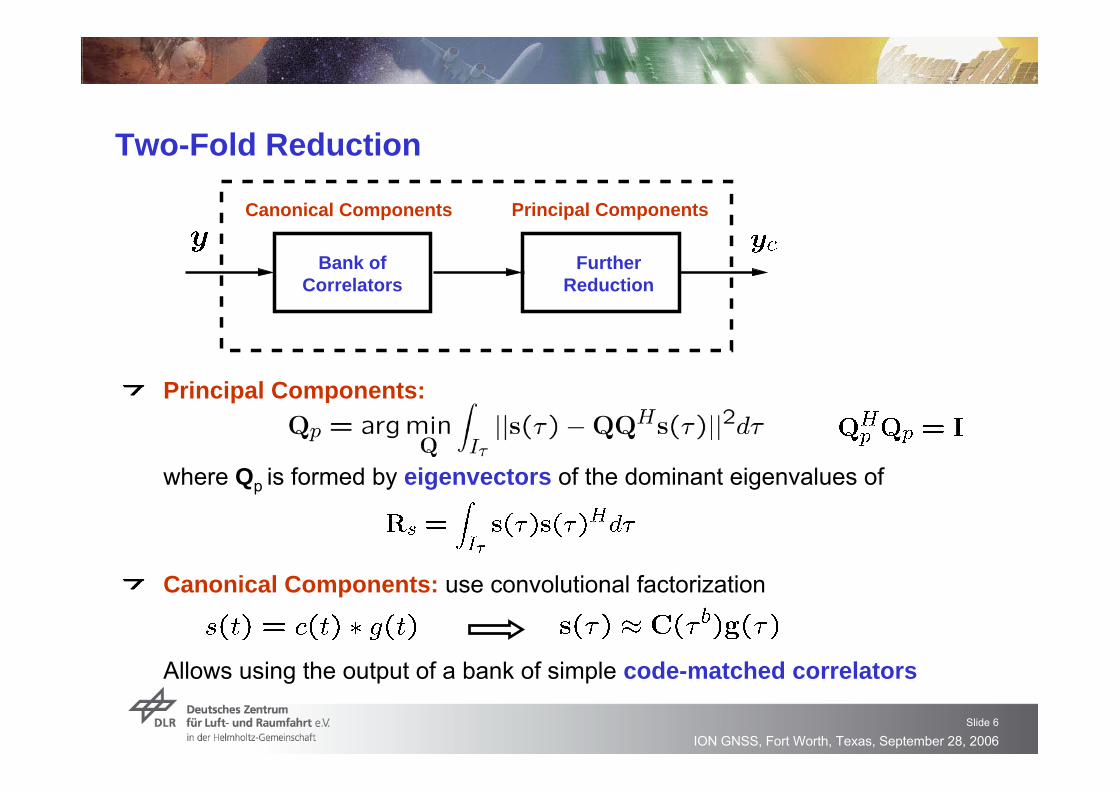
Two-Fold Reduction
Principal Components:
where Qp is formed by eigenvectors of the dominant eigenvalues of
Canonical Components: use convolutional factorization
Allows using the output of a bank of simple code-matched correlators
Principal ComponentsCanonical Components
Bank of Correlators
Further Reduction
ION GNSS, Fort Worth, Texas, September 28, 2006Slide 7
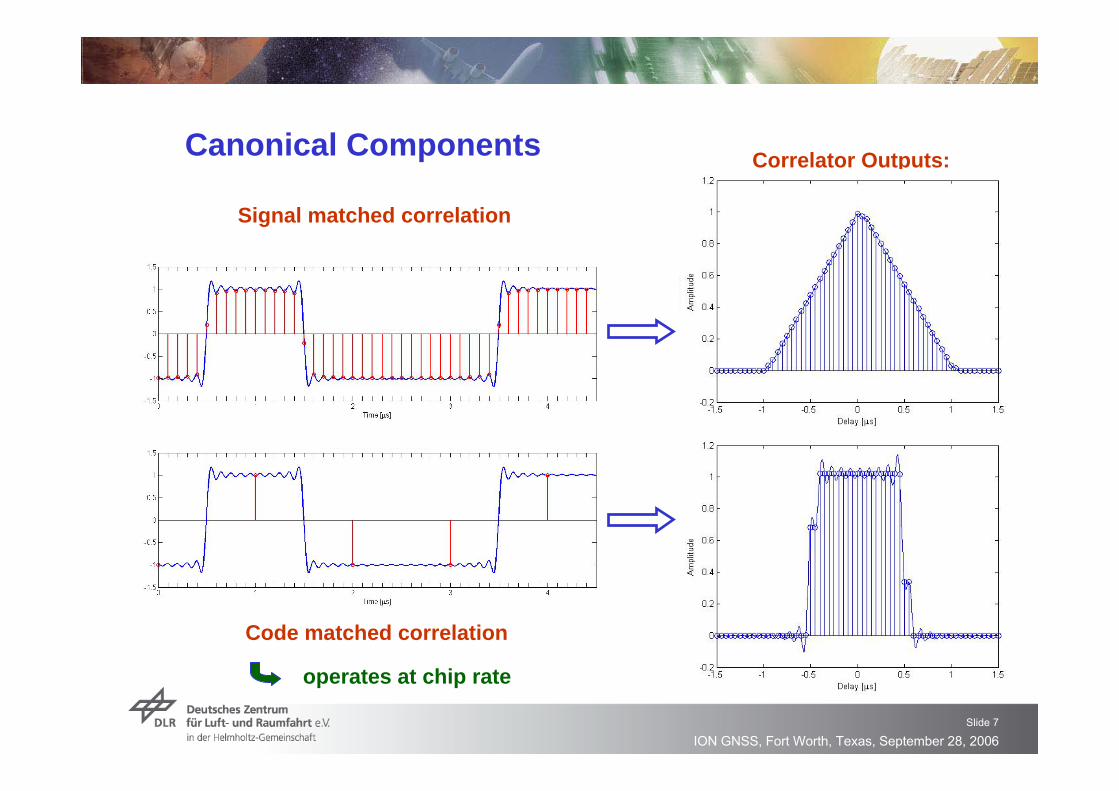
Canonical Components
Signal matched correlation
Code matched correlation
Correlator Outputs:
operates at chip rate

ION GNSS, Fort Worth, Texas, September 28, 2006Slide 8
Efficient Cost Function MinimizationNewton Optimiser with explicitformulas for gradient and Hessian:
where
The optimization can be performed in the subspace of small dimension.
MVPmethod
Vandermonde vectorInverse DFT matrix DFT of pulse
with
Interpolation techniques:
continuous time-shift possible
-10 -8 -6 -4 -2 0 2 4 6 8 10-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Time [samples]
Am
plitu
de
ION GNSS, Fort Worth, Texas, September 28, 2006Slide 9
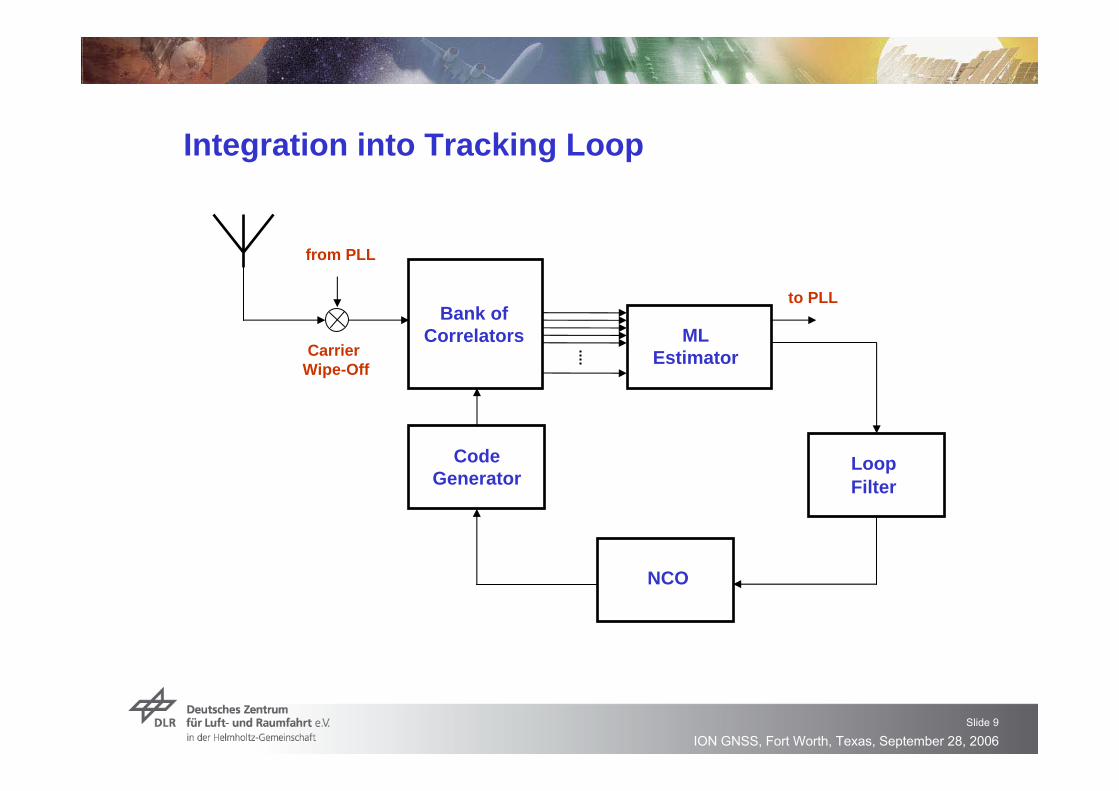
Integration into Tracking Loop
LoopFilter
NCO
Code Generator
from PLL
CarrierWipe-Off
Bank of Correlators ML
Estimator
to PLL

ION GNSS, Fort Worth, Texas, September 28, 2006Slide 10
30 35 40 45 50 55 60 65 70
10-10
10-9
10-8
10-7
C/N0 [dB-Hz]
RM
S e
rror [
s]
Performance without Multipath
30 35 40 45 50 55 60 65 70
10-10
10-9
10-8
10-7
C/N0 [dB-Hz]
RM
S e
rror [
s]1 chip
0.5 chips
0.3 chips
0.1 chips
Cramer Rao bound
MLE, 1ms
MLE, 10ms
ION GNSS, Fort Worth, Texas, September 28, 2006Slide 11
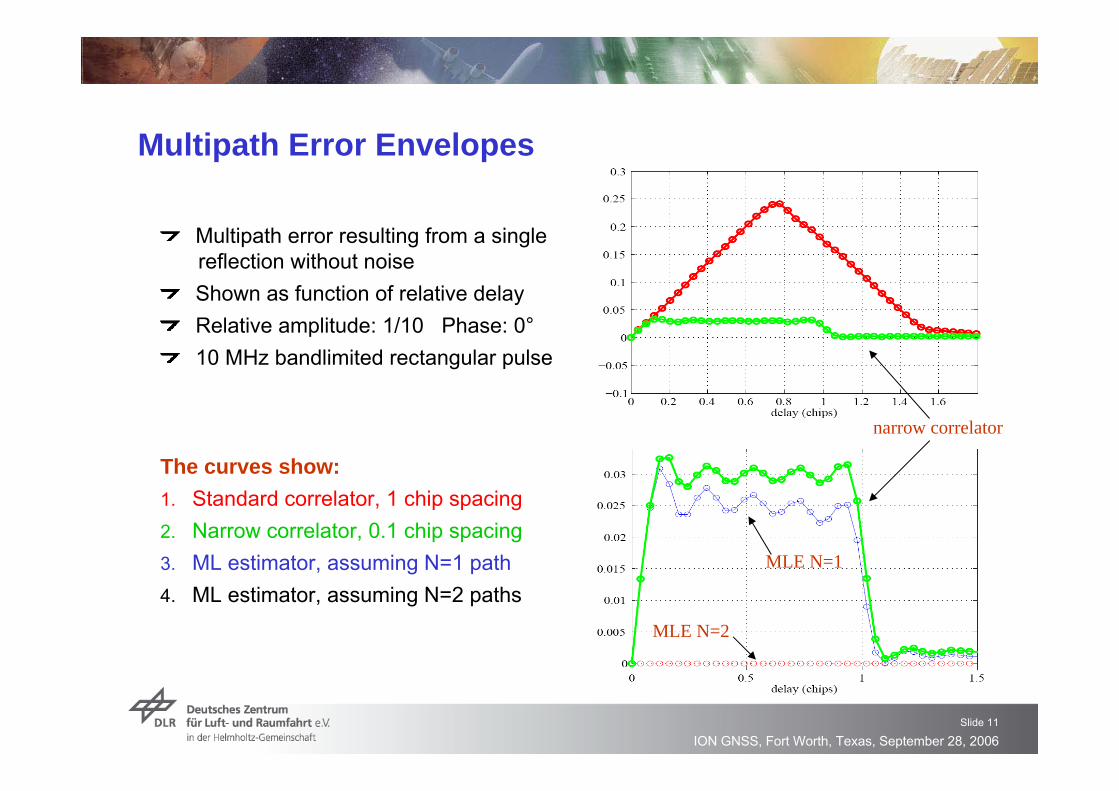
Multipath Error Envelopes
Multipath error resulting from a singlereflection without noiseShown as function of relative delayRelative amplitude: 1/10 Phase: 0°10 MHz bandlimited rectangular pulse
The curves show:1. Standard correlator, 1 chip spacing2. Narrow correlator, 0.1 chip spacing3. ML estimator, assuming N=1 path4. ML estimator, assuming N=2 paths
narrow correlator
MLE N=1
MLE N=2
ION GNSS, Fort Worth, Texas, September 28, 2006Slide 12
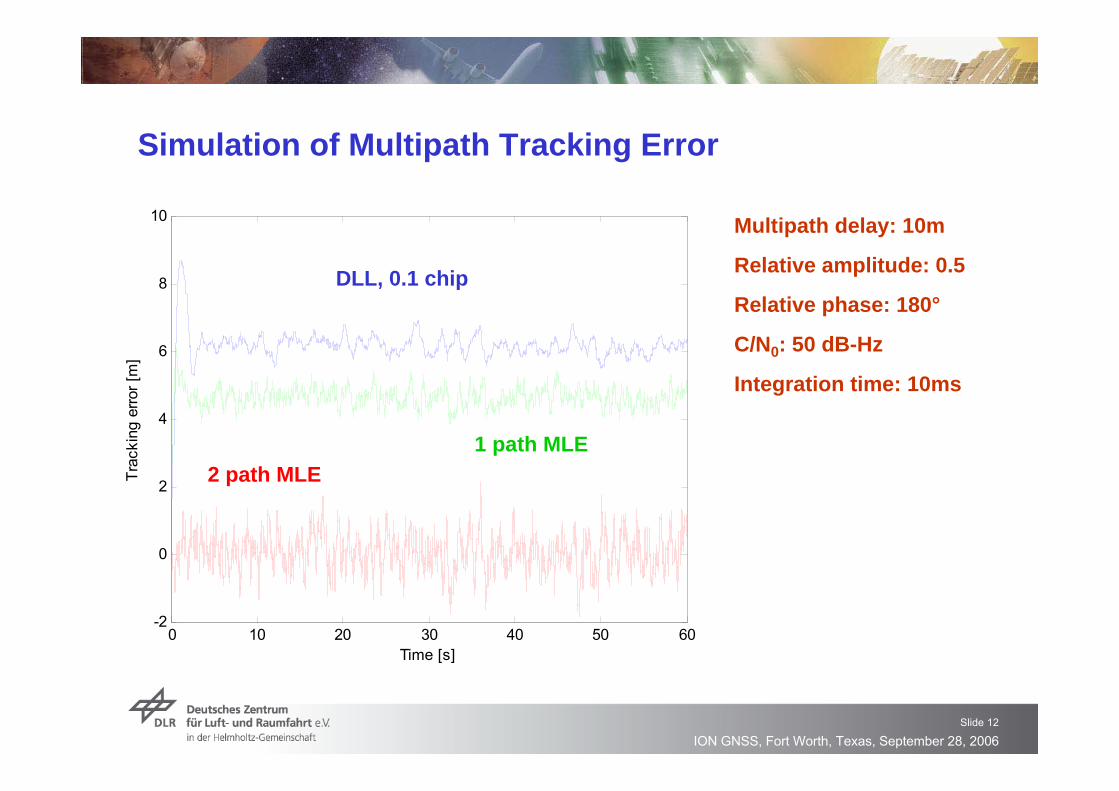
Simulation of Multipath Tracking Error
0 10 20 30 40 50 60-2
0
2
4
6
8
10
Time [s]
Trac
king
erro
r [m
]
Relative amplitude: 0.5
Relative phase: 180°
C/N0: 50 dB-Hz
Integration time: 10ms
DLL, 0.1 chip
1 path MLE2 path MLE
Multipath delay: 10m
ION GNSS, Fort Worth, Texas, September 28, 2006Slide 13
Conclusions
Signal compression and interpolationa small data set contains all necessary information on parametersNewton optimizationforms an efficient way to find the ML solution
Further topics:Path number problemsoft information better than fixed selection/decision?Sequential estimation (Bayesian filtering)using history, not only independent ML snapshotsIncorporation of prior knowledge about channelmovement models, echo statistics

ION GNSS, Fort Worth, Texas, September 28, 2006Slide 14
Thanks for your attention!