mech 4240 - concept review - auburn universitydbeale/mech4240-50/reports/excavator...lunabotics...
TRANSCRIPT

MECH 4240 - Concept Review
Corp_2 – Lunar Excavator Anna Holland
Kyle Otte Alex Hollis
Cody Salmon Han Cho

Outline
Concept Development
• Mission Objective
• Gantt Chart
• Subsystem Concepts
• Decision Matrix
• 3 Concepts
Concept Details
• Final Concept
• Drive System
• Scoop System
• Dump System
• Analysis & Testing

Mission Objective
Create an autonomous excavator that weighs less than 80 kg, can collect and deposit at
least 300 kg of lunar regolith within the 15 minute time limit, and that will win the 2012
Lunabotics Mining Competition. The overall size cannot exceed 0.75 m width x 1.5 m
length x 2 m height at the start of the competition. However, the length and width
constraints may be exceeded once the competition starts.

Gantt Chart

Concepts

Decision Matrix
+ Accomplishes Well - Accomplishes Poorly 0 Indifferent
Drive System
Weigh
t
Strength
Co
st
Co
mp
lexity
Effectiveness
Risk o
f Failure
Speed
Total
6 Wheels - + - + + + + 3
4 Wheels 0 0 0 + - + + 2
Tracks - + - - + - 0 -2
Scoop System
Bucket with actuator 0 0 + + + + 0 4
Grader + - + + - 0 - 0
Conveyer Belt - - - - + - + -3
Broom and Dust Pan 0 0 - - 0 0 0 -2
Pull Bucket - - - 0 + 0 0 -2
Auger + + - - - 0 + 0
Dump System
Dump hopper 0 + + + + 0 - 3
Auger + + - - + - - -1
Material
Fiberglass 0 + + 0 + 0 0 3
Aluminum - + 0 + + 0 0 2
Carbon fiber + - - 0 + - 0 -1

Conveyor Failing

Tracks Failing

Concept Option 1
Disadvantages: •Hard object could clog the auger •Regolith could clump and not be picked up by auger •Strong motor needed on the bucket (scooping system)
Drive System: 6 Wheel
Scoop System: Bucket
Dump System: Auger

Concept Option 2
Disadvantage: •Strong motor needed on the bucket (scooping system)
Drive System: 6 Wheel
Scoop System: Bucket
Dump System: Hopper

Concept Option 3
Disadvantages: • Small buckets take longer
to fill Hopper • Very complex design • Belts are less reliable
Drive System: 6 Wheel
Scoop System: Belt with small buckets
Dump System: Hopper

Final Concept
• 6 Wheels
• Regolith Storage Hopper
• Actuator Controlled Dump
System of Entire Storage Hopper
• Single Large Bucket for Mining
Regolith
• Rotational Joint on Bucket Arm
• 1 DOF Regolith Transfer

Solid Edge Simulation

Working Model Simulation
• Actuators strong enough for max loads
• Wheels have enough torque
• Reasonable actuator lengths
• System within size limitation
• Max dump angle ~55°

Drive Subsystem
• 6 motors to control wheels
• (6) 10” x 4” Polyethylene Wheels
•Skid steer system
•Frame Material: Fiberglass Tube
• 1 m x 0.4 m x 0.5 m frame box houses motors, Netbook, & electronics
Analysis & Testing
- Required motor torque can be reached with gearing
- 6 wheels provides enough traction

ARGO 6 Wheel System
• Proof of Concept
• No suspension
• Skid steer system
• Very stable
• Very powerful

Dump Subsystem
• Max Capacity: 150 kg
• Material: Aluminum bottom and front
Analysis & Testing
- 7000 N actuator strong enough to lift full load
- Length of Actuator is reasonable (12 in)

Scoop Subsystem
• Max Capacity: 17.5 kg
• 8.6 full scoops = 1 full hopper
• 18.75 small scoops = 1 full hopper
• Blade to cut through top layer
• Material: Aluminum bottom and back
Analysis & Testing
- Actuator strong enough to lift full load
- Length of actuator is reasonable (12 in)
- Arm length sufficient to reach hopper
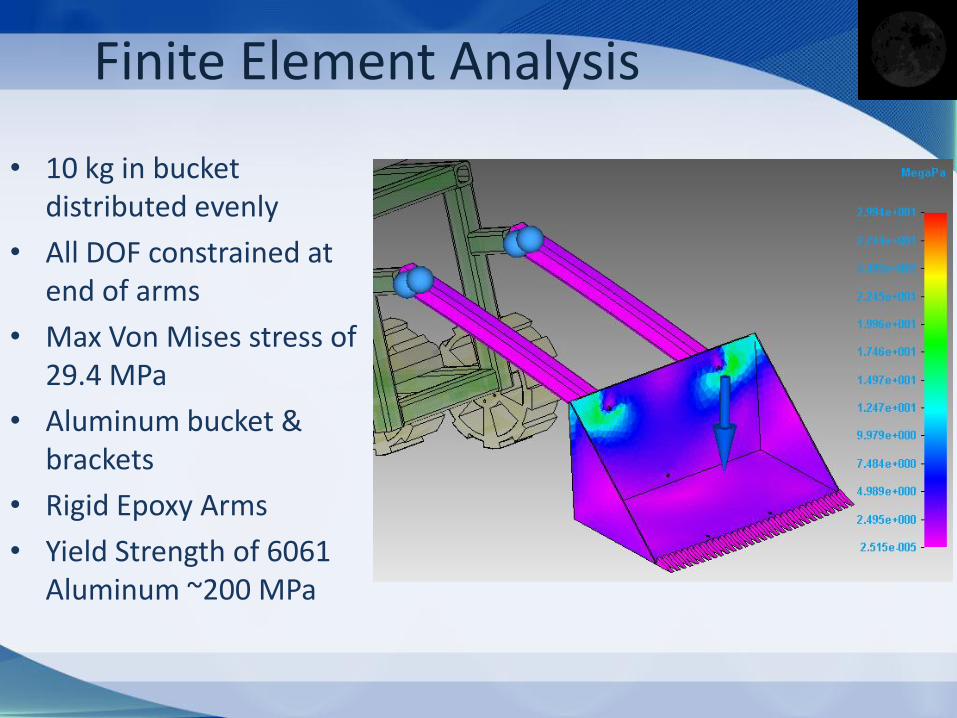
Finite Element Analysis
• 10 kg in bucket distributed evenly
• All DOF constrained at end of arms
• Max Von Mises stress of 29.4 MPa
• Aluminum bucket & brackets
• Rigid Epoxy Arms
• Yield Strength of 6061 Aluminum ~200 MPa

USDA Testing
Speed Test Results
Weight Added Distance Time Avg. Velocity
0 kg 5 m 7.0 sec 0.714 m/s
95 kg 5 m 8.0 sec 0.625 m/s
196 kg 5 m 10.3 sec 0.485 m/s
• Motor performance not affected
• Velocity loss mostly due to 4 small wheels & ground clearance
• Issues with battery & Netbook housing

Electrical System
Issues from testing
• Battery and Netbook housing
• Loss of battery connection
Re-Design
• Incorporate specific housing to prevent battery from disconnecting
• Protect/cushion the Netbook from vibration damage

First Cut Economic Analysis
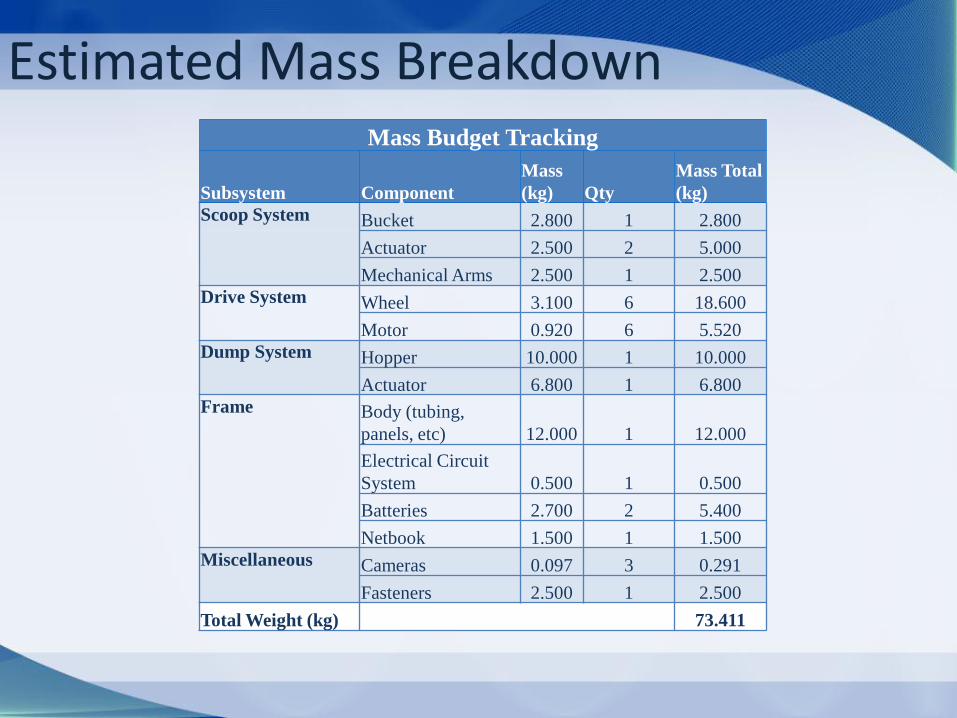
Estimated Mass Breakdown Mass Budget Tracking
Subsystem Component
Mass
(kg) Qty
Mass Total
(kg)
Scoop System Bucket 2.800 1 2.800
Actuator 2.500 2 5.000
Mechanical Arms 2.500 1 2.500
Drive System Wheel 3.100 6 18.600
Motor 0.920 6 5.520
Dump System Hopper 10.000 1 10.000
Actuator 6.800 1 6.800
Frame Body (tubing,
panels, etc) 12.000 1 12.000
Electrical Circuit
System 0.500 1 0.500
Batteries 2.700 2 5.400
Netbook 1.500 1 1.500
Miscellaneous Cameras 0.097 3 0.291
Fasteners 2.500 1 2.500
Total Weight (kg) 73.411

Critical Design Review
• Full failure analysis / Concept verification
• Scaled down mock up
• Further Testing
– Aluminum angle test
– 3 point bending test on fiberglass tubing
– Moment calculations for arms & actuators
– Finite Element Analysis
• Fully dimensioned CAD drawings
• Dissemble old excavator (Preserve Electrical)

Any Questions?