model decomposition of lti systems
TRANSCRIPT

Modal decomposition of LTI systems
Mihailo Jovanovicee.usc.edu/mihailo/
EE 585; Fall 2017

EE 585: Fall 2017 1
State-space representation
state equation: x(t) = Ax(t) + B d(t)
output equation: y(t) = C x(t)
• Solution to state equation
x(t) = eAt x(0) +
∫ t
0
eA(t− τ)B d(τ) dτ
←−
←−
unforcedresponse
forcedresponse

EE 585: Fall 2017 2
Transform techniques
x(t) = Ax(t) + B d(t)Laplace transform−−−−−−−−−−−−−−−→ s x(s) − x(0) = A x(s) + B d(s)
x(t) = eAt x(0) +
∫ t
0
eA(t− τ)B d(τ) dτ
m
x(s) = (sI − A)−1x(0) + (sI − A)
−1B d(s)

EE 585: Fall 2017 3
Natural and forced responses
• Unforced response
matrix exponential resolvent
x(t) = eA t x(0) x(s) = (sI − A)−1x(0)
• Forced response
impulse response transfer function
H(t) = C eA tB H(s) = C (sI − A)−1B
? Response to arbitrary inputs
y(t) =
∫ t
0
H(t − τ) d(τ) dτLaplace transform−−−−−−−−−−−−−−−→ y(s) = H(s) d(s)

EE 585: Fall 2017 4
UNFORCED RESPONSES
EE 585: Fall 2017 5
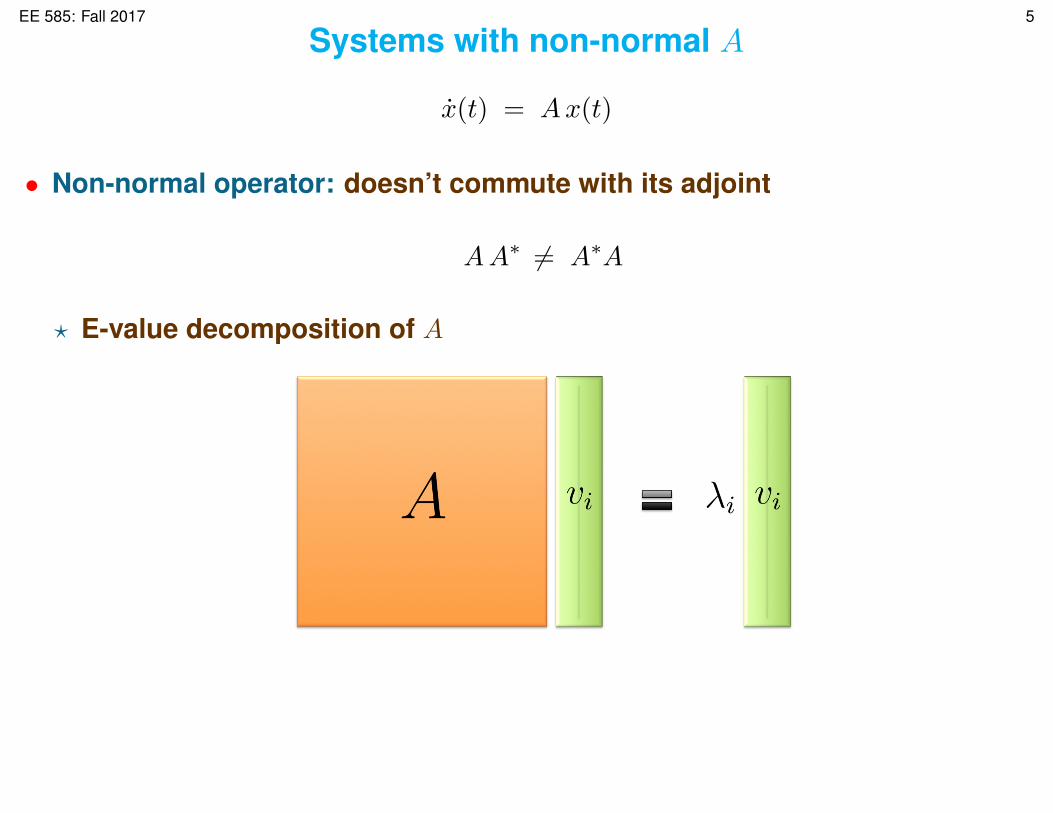
Systems with non-normal A
x(t) = Ax(t)
• Non-normal operator: doesn’t commute with its adjoint
AA∗ 6= A∗A
? E-value decomposition of A

EE 585: Fall 2017 6
• Let A have a full set of linearly independent e-vectors
? normal A: unitarily diagonalizable
A = V ΛV ∗

EE 585: Fall 2017 7
• E-value decomposition of A∗
choose wi such that w∗i vj = δij

EE 585: Fall 2017 8
• Use V and W ∗ to diagonalize A
? solution to x(t) = Ax(t)
x(t) = eA t x(0) =
n∑i=1
eλit vi (wi∗x(0))

EE 585: Fall 2017 9
• Right e-vectors
? identify initial conditions with simple responses
x(t) =
n∑i=1
eλit (wi∗x(0)) vi
y x(0) = vk
x(t) = eλkt vk
EE 585: Fall 2017 10
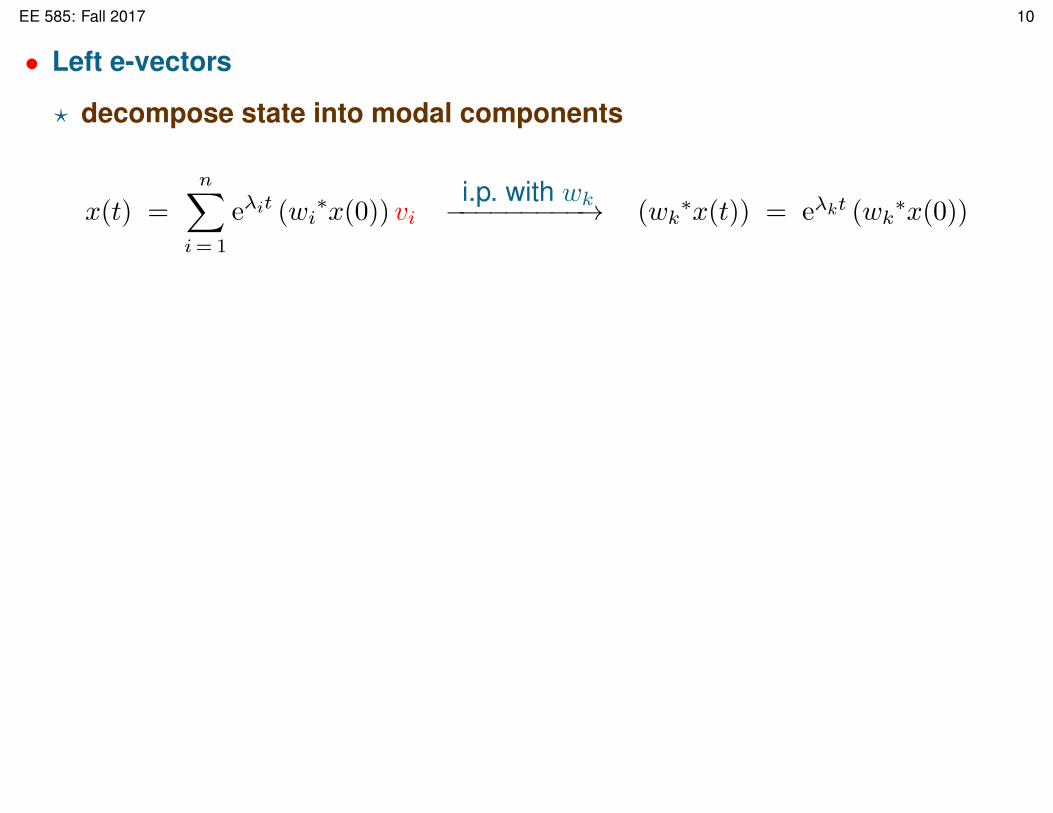
• Left e-vectors
? decompose state into modal components
x(t) =
n∑i=1
eλit (wi∗x(0)) vi
i.p. with wk−−−−−−−−−→ (wk∗x(t)) = eλkt (wk
∗x(0))

EE 585: Fall 2017 11
A toy example[x1x2
]=
[−1 0
k −2
] [x1x2
]
x1(t
),x
2(t
)

EE 585: Fall 2017 12
• E-value decomposition of A =
[−1 0
k −2
]{v1 =
1√1 + k2
[1k
], v2 =
[01
]}{w1 =
[ √1 + k2
0
], w2 =
[−k1
]}
solution to x(t) = Ax(t):
x(t) =(e−t v1w
∗1 + e−2t v2w
∗2
)x(0)
←−[
x1(t)
x2(t)
]=
[e−t x1(0)
k(e−t − e−2t
)x1(0) + e−2t x2(0)
]
• E-values: misleading measures of transient response
EE 585: Fall 2017 13
FORCED RESPONSES(LATER IN THE COURSE)

EE 585: Fall 2017 14
Amplification of disturbances
• Harmonic forcing
d(t) = d(ω) ejωtsteady-state response−−−−−−−−−−−−−−−−−−−→ y(t) = y(ω) ejωt
? Frequency response
y(ω) = C (jωI − A)−1B︸ ︷︷ ︸
H(ω)
d(ω)
example: 3 inputs, 2 outputs
[y1(ω)y2(ω)
]=
[H11(ω) H12(ω) H13(ω)H21(ω) H22(ω) H23(ω)
] d1(ω)
d2(ω)
d3(ω)
Hij(ω) – response from jth input to ith output
EE 585: Fall 2017 15
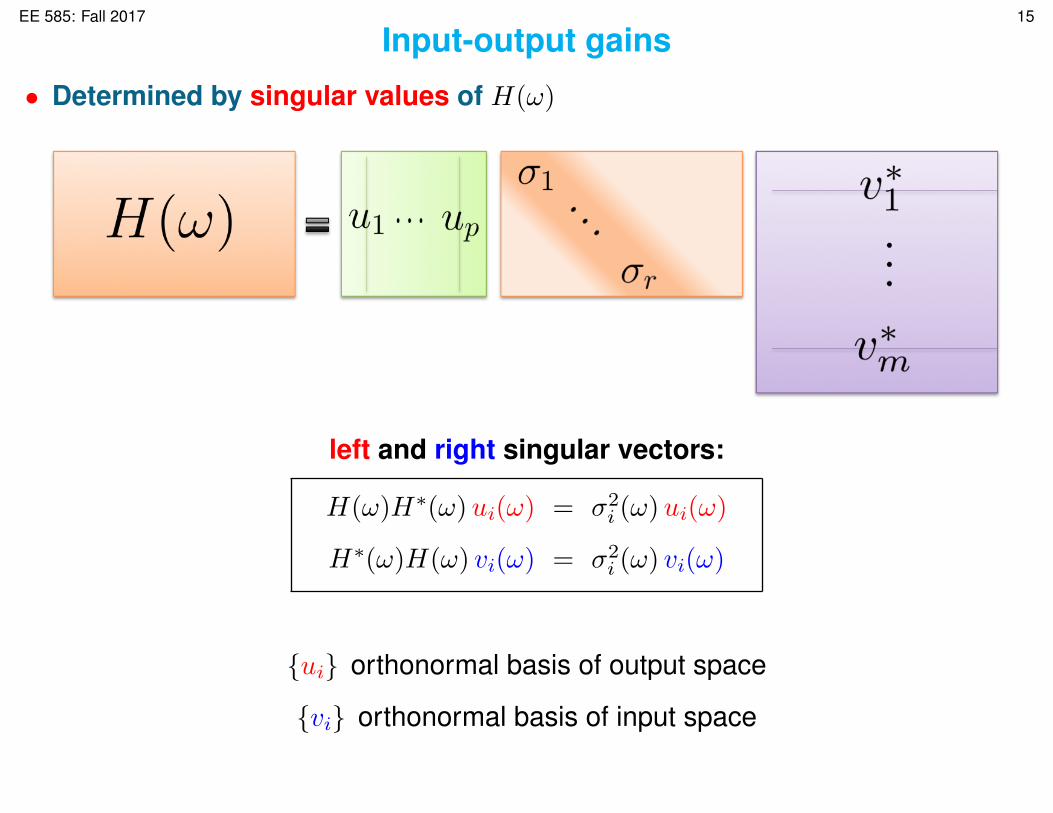
Input-output gains
• Determined by singular values of H(ω)
left and right singular vectors:
H(ω)H∗(ω)ui(ω) = σ2i (ω)ui(ω)
H∗(ω)H(ω) vi(ω) = σ2i (ω) vi(ω)
{ui} orthonormal basis of output space
{vi} orthonormal basis of input space

EE 585: Fall 2017 16
• Action of H(ω) on d(ω)
y(ω) = H(ω) d(ω) =
r∑i=1
σi(ω)ui(ω)⟨vi(ω), d(ω)
⟩
• Right singular vectors
? identify input directions with simple responses
σ1(ω) ≥ σ2(ω) ≥ · · · > 0
y(ω) =r∑
i=1
σi(ω)ui(ω)⟨vi(ω), d(ω)
⟩y d(ω) = vk(ω)
y(ω) = σk(ω)uk(ω)
σ1(ω): the largest amplification at any frequency

EE 585: Fall 2017 17
Worst case amplification• H∞ norm: an induced L2 gain (of a system)
G = ‖H‖2∞ = maxoutput energyinput energy
= maxω
σ21 (H(ω))
σ2 1(H
(ω))
EE 585: Fall 2017 18
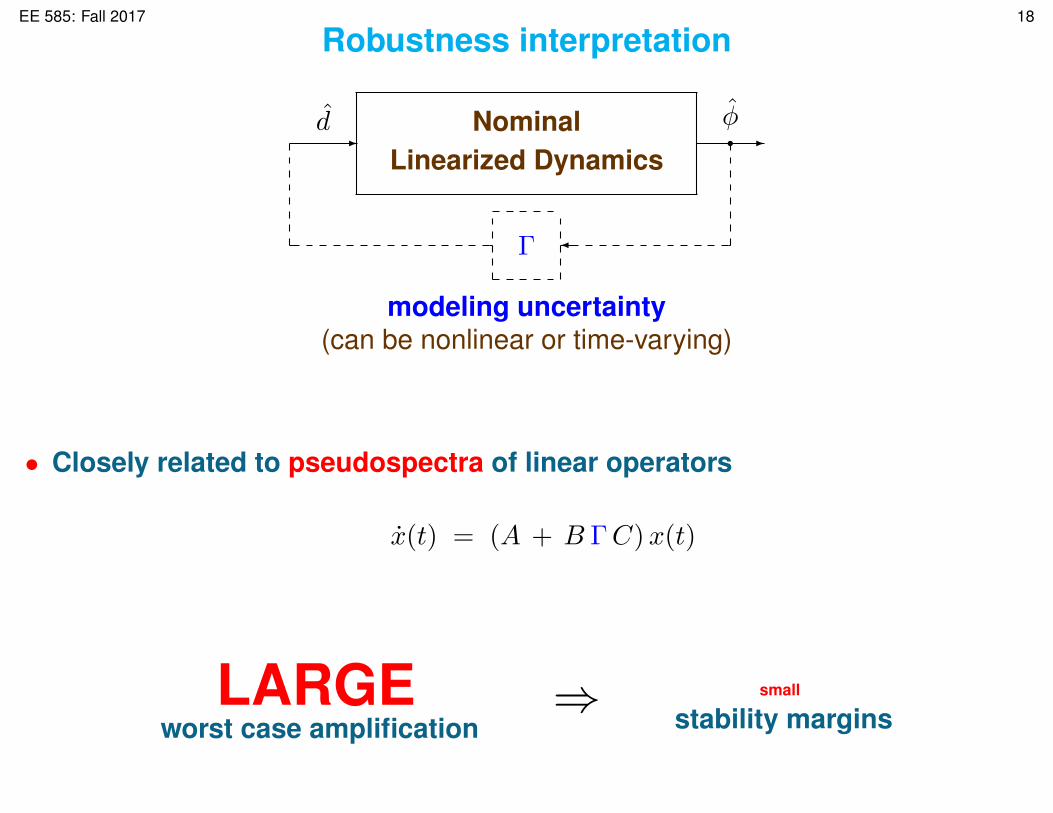
Robustness interpretation
-d Nominal
Linearized Dynamicss -
φ
�Γ
modeling uncertainty(can be nonlinear or time-varying)
• Closely related to pseudospectra of linear operators
x(t) = (A + B ΓC)x(t)
LARGEworst case amplification
⇒ small
stability margins
EE 585: Fall 2017 19
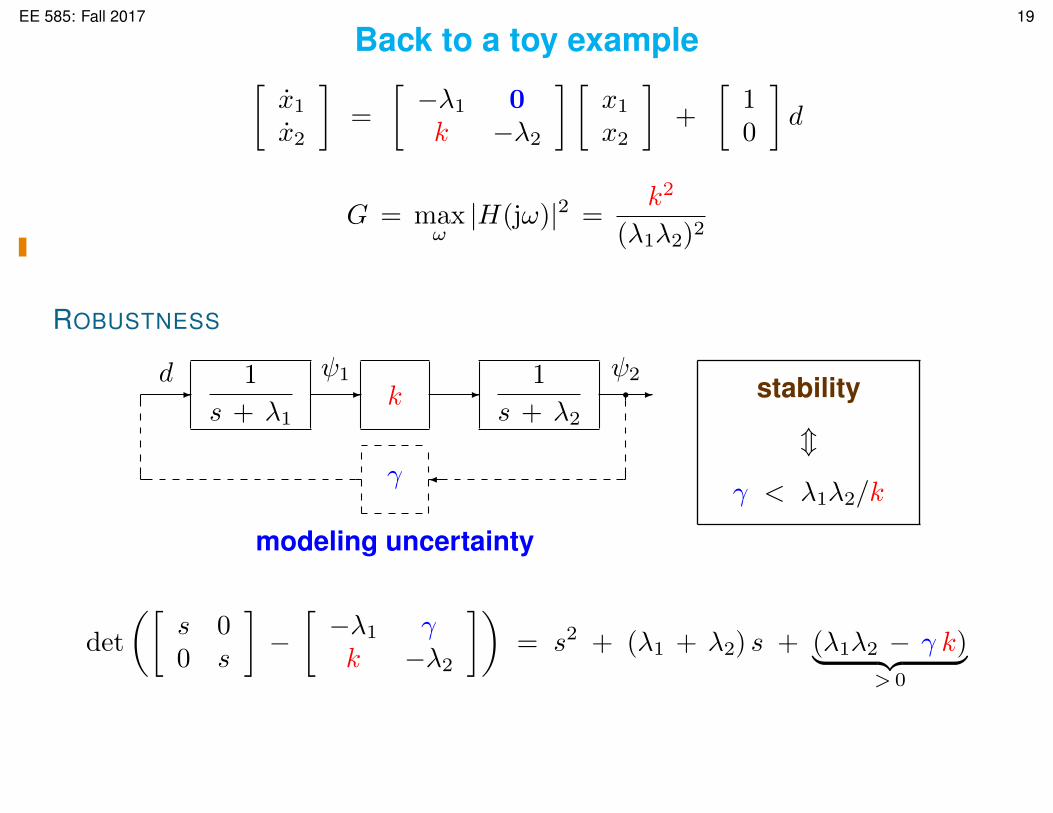
Back to a toy example[x1x2
]=
[−λ1 0k −λ2
] [x1x2
]+
[10
]d
G = maxω|H(jω)|2 =
k2
(λ1λ2)2
ROBUSTNESS
-d 1
s + λ1-
ψ1
k -1
s + λ2s -ψ2
�γ
modeling uncertainty
stability
m
γ < λ1λ2/k
det
([s 00 s
]−[−λ1 γk −λ2
])= s2 + (λ1 + λ2) s + (λ1λ2 − γ k)︸ ︷︷ ︸
> 0
EE 585: Fall 2017 20
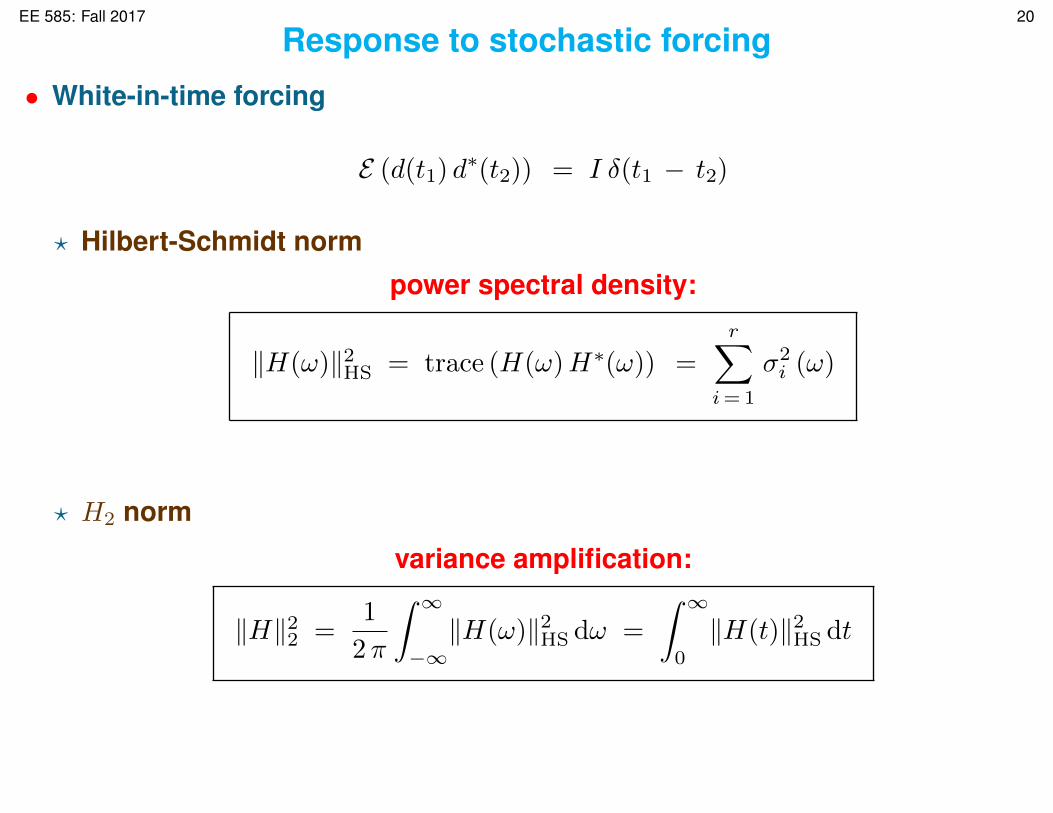
Response to stochastic forcing
• White-in-time forcing
E (d(t1) d∗(t2)) = I δ(t1 − t2)
? Hilbert-Schmidt norm
power spectral density:
‖H(ω)‖2HS = trace (H(ω)H∗(ω)) =
r∑i=1
σ2i (ω)
? H2 norm
variance amplification:
‖H‖22 =1
2π
∫ ∞−∞‖H(ω)‖2HS dω =
∫ ∞0
‖H(t)‖2HS dt

EE 585: Fall 2017 21
Computation of H2 and H∞ norms
x(t) = Ax(t) + B d(t)
y(t) = C x(t)
• H2 norm
? Lyapunov equation
E (d(t1) d∗(t2)) = W δ(t1 − t2) ⇒
{‖H‖22 = trace (C P C∗)
AP + P A∗ = −BWB∗
• H∞ norm
? E-value decomposition of Hamiltonian in conjunction with bisection
‖H‖∞ ≥ γ ⇔
[A 1
γ BB∗
−1γ C∗C −A∗
]has at least one imaginary e-value