modeling, fabrication and anaysis of four wheel … · modeling, fabrication and anaysis of four...
TRANSCRIPT
http://www.iaeme.com/IJMET/index.asp 666 [email protected]
International Journal of Mechanical Engineering and Technology (IJMET) Volume 9, Issue 13, December 2018, pp. 666–675, Article ID: IJMET_09_13_069
Available online at http://www.iaeme.com/ijmet/issues.asp?JType=IJMET&VType=9&IType=13
ISSN Print: 0976-6340 and ISSN Online: 0976-6359
© IAEME Publication Scopus Indexed
MODELING, FABRICATION AND ANAYSIS OF
FOUR WHEEL STEERING SYSTEM TO
QUADRICYCLE NAMED SPINNER
Subrahmanyam Vasamsetti, Rajasekhar Sandhi and Raja Sekher Jagathani
Associate Professor, Department of Automobile Engineering,
Godavari Institute of Engineering and Technology, Rajahmundry, AP, India.
Aruna Kunda
Associate Professor, Department of Mechanical Engineering,
Ideal Institute of Technology, Kakinada, Andhra Pradesh, India.
ABSTRACT
In this project work an effort was made to suggest a suitable compact car model to
overcome traffic and parking problems in urban mobility. In this project an existing
hatchback car chassis is modified accordingly. The corners are trimmed and reduced to
single box section i.e., two seats with two doors and a luggage boot. The reduced weight
decreased the manufacturing cost and improved the mileage. All the wheels were coupled
to steer about a common instantaneous center. This design allowed the vehicle to steer
with least effort at a small turning radius about 2.9 m and hence highly maneuverable.
This mechanism enhances the tyre and wheel bearings life.
Key words: Quadricycle, Spinner car, Mini-car, Small car, Micro car, four wheel
steering, all wheel steering.
Cite this Article: Subrahmanyam Vasamsetti, Rajasekhar Sandhi, Raja Sekher Jagathani
and Aruna Kunda, Modeling, Fabrication and Anaysis of Four Wheel Steering System to
Quadricycle Named Spinner, Journal of Mechanical Engineering and Technology, 9(13),
2018, pp. 666–675
http://www.iaeme.com/IJMET/issues.asp?JType=IJMET&VType=9&IType=13
1. INTRODUCTION
Population in cities is increasing day by day and thereby increasing the number of personal cars.
So traffic jams are becoming most common in all most all cities and even in small towns.
Utilization of small cars known as quadricycles is one of the solutions to avoid traffic jams and
parking problems considerably. A Quadricycle is a four wheeled two seated automobile just like
a car but propelled with a low capacity engine, can travel at a limited speed and weight not more
than 350 kilos. Quadricycles are famous in European countries such as France, England and
Germany. The purpose of Quadricycle is to utilize in cities more prone to have traffic jams. The

Subrahmanyam Vasamsetti, Rajasekhar Sandhi, Raja Sekher Jagathani and Aruna Kunda
http://www.iaeme.com/IJMET/index.asp 667 [email protected]
Quadricycles are compact in design which allows easy driving even in rush roads and occupies
less parking space.
There is a need of compact cars to control traffic jams and parking problems. Moreover
it fulfills the dream of middle class people of having a car. With this project work a model was
suggested to overcome the most common traffic problems in cities and towns to some extent.
It is so expensive to design, model and fabricate a car. In this project a discarded
hatchback car chassis was taken and remodeled it. The vehicle is topless single box section
arranged with two seats and a luggage boot. It’s a concept car and named it as ‘SPINNER’ which
is designed to highly maneuverable.
Lot of research is going on steering systems to improve the maneuverability of
automobiles [1-5, 7]. Tahami et al. [1, 2] discussed enhancing of stability of electric vehicle with
all wheel steering during cornering as well as straight line motion on slippery terrains using Fuzzy
logic techniques. They proved assistance of all wheel steering to drivers during emergency
driving using the same logic. Galmarini et al. [6] discussed in detailed the need of quadricycle to
decrease pollution in urban areas. Furukawa et al. [7] studied four-wheel steering system to cars
with respect to vehicle dynamics. Santis et al. [8] characterized the various components of
powertrain in a hybrid quadricycle. Castelli et al. [9] designed and tested quadricycle powered by
electric motor to limit pollution. Wasielewski et al. [10] analyzed risk of driver with car mass,
driver age and seat belt. They concluded that the small cars have less risk while accident took
place. Whitehead [11] conducted compared maneuvering of front wheel steering vehicles with
four-wheel-steering cars and showed that the later vehicles have rapid lane changes with less
effort. Cignini et al. [12] fabricated microcar “Spazia”, found increase in acceleration by 20%
and reduce in fuel consumption by 25%. Cotana et al. [13] studied noise contributions of four
wheel hybrid quadricycle for postal delivery instead of bikes. Pavlovic et al. [14] formulated
numerical simulations for quadricycle crash tests. Wang et al. [15] developed algorithm for four-
wheel-steering vehicle trajectory planning.
2. MODELING AND FABRICATION
Automobile consists of several systems to propel, steer, brake or slow down. All these assemblies
are mounted on frame to form a chassis. The chassis comprises of skeleton like structure called
frame. The basic frame used in this developed model was taken from an old Maruti 800 hatchback
model which is an integral body structure.
2.1 Body Modeling
The chassis, front wings, rear quarters and roof provides strength to the vehicle body. The roof
was removed since the body had been cut and shortened to make it lighter. A soft roof can be
arranged as optional to keep light weight. Other parts such as window glasses, door panels, sub-
frames and floor-pan can also help to strengthen the vehicle body. The front and rear bumpers
give protection during slow speed collisions. The Maruti 800 car chassis was modified
accordingly. The corners were trimmed and reduced to single box section i.e., two seats with two
doors and a small luggage boot. This design helps to pass the vehicle through rush roads easily.
The fabrication work is shown in the fig. 1.
Modeling, Fabrication and Anaysis of Four Wheel Steering System to Quadricycle Named Spinner
http://www.iaeme.com/IJMET/index.asp 668 [email protected]
Figure. 1 Fabrication of quadricycle ‘Spinner’
2.2 Prime Mover
The Spinner vehicle was fitted with 800 CC, 3 Cylinder, 4 Stroke, Water cooled, Carburetor SI
engine for better pick up. The present model weights 300 kg only and it can be pulled by a 200
CC bike engine easily which can decrease the manufacturing cost and improves mileage.
2.3 Transmission
The transmission system affixed in this vehicle was a single plate dry clutch. The clutch transmits
torque by virtue of friction. If the frictional torque exceeds the torque to be transmitted, then the
power is transmitted from the driving shaft to the driven shaft without slipping.
Synchromesh gear box of manual operation was selected which includes four forward speed
synchromesh in all gears and one reverse on sliding mesh. Most modern manual-transmission
vehicles are fitted with a synchronized gear box. Reverse gear is usually not synchromesh, as
there is only one reverse gear in the normal automotive transmission and changing gears into
reverse while moving is not required.
The engine power was transmitted to the front wheels through drive shafts. The differential
motion was achieved with differential employing planetary gears, which is connected to the road
wheels through drive shafts.
2.4 Modeling of Steering System
The widely used steering mechanism is Ackerman steering mechanism. Though it’s not
kinematically accurate it uses spherical pairs, which offers less friction and the driver needs less
effort.
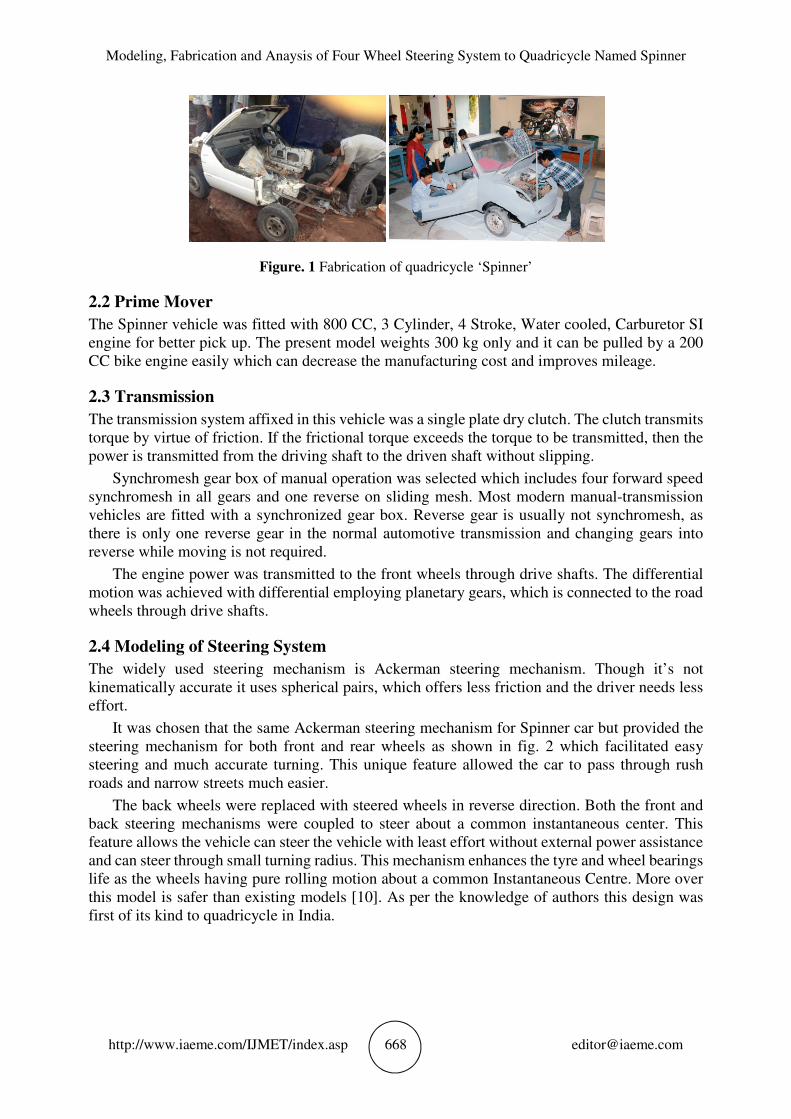
It was chosen that the same Ackerman steering mechanism for Spinner car but provided the
steering mechanism for both front and rear wheels as shown in fig. 2 which facilitated easy
steering and much accurate turning. This unique feature allowed the car to pass through rush
roads and narrow streets much easier.
The back wheels were replaced with steered wheels in reverse direction. Both the front and
back steering mechanisms were coupled to steer about a common instantaneous center. This
feature allows the vehicle can steer the vehicle with least effort without external power assistance
and can steer through small turning radius. This mechanism enhances the tyre and wheel bearings
life as the wheels having pure rolling motion about a common Instantaneous Centre. More over
this model is safer than existing models [10]. As per the knowledge of authors this design was
first of its kind to quadricycle in India.
Subrahmanyam Vasamsetti, Rajasekhar Sandhi, Raja Sekher Jagathani and Aruna Kunda
http://www.iaeme.com/IJMET/index.asp 669 [email protected]
Figure.2 Connections of front and rear wheel stub axles.
Rack and Pinion gear box was selected for the steering operation. The steering wheel and
steering shaft were connected to a pinion gear. The pinion gear is in mesh with a straight bar that
has gear teeth cut into one side. The toothed bar is called a rack. When the driver turns the steering
wheel, the pinion gear turns, causing the rack to move. This movement, in turn, was connected
to both front and rear linkage that moves the front wheels. The rack-and-pinion gear is mounted
in a rack housing assembly. The steering linkage consists of two inner tie rods and two tie rod
ends. The inner tie rod ends were attached to the steering rack ends. The outer tie rod ends were
attached to the suspension arms on the steering knuckles. Rubber boots were used to cover and
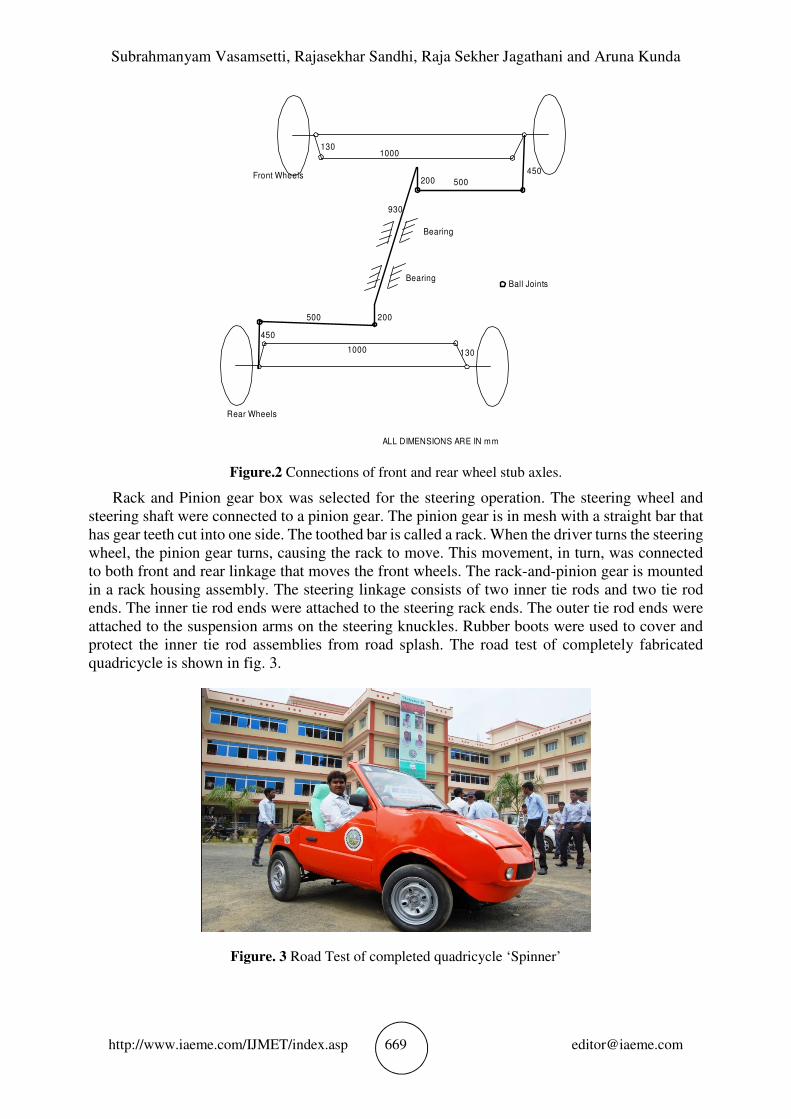
protect the inner tie rod assemblies from road splash. The road test of completely fabricated
quadricycle is shown in fig. 3.
Figure. 3 Road Test of completed quadricycle ‘Spinner’
1301000
450
500
930
200
200
500
450
1301000
ALL DIMENSIONS ARE IN mm
Ball Joints
Bearing
Bearing
Front Wheels
Rear Wheels
Modeling, Fabrication and Anaysis of Four Wheel Steering System to Quadricycle Named Spinner
http://www.iaeme.com/IJMET/index.asp 670 [email protected]
3. RESULTS AND DISCUSSION
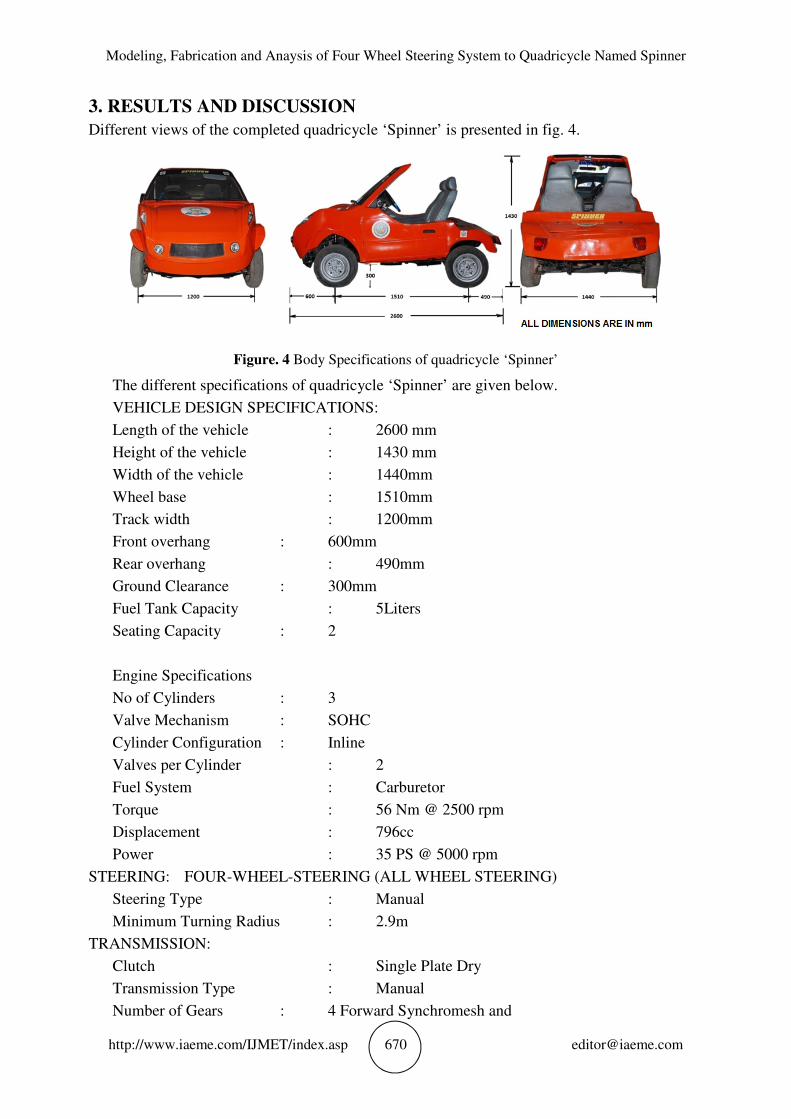
Different views of the completed quadricycle ‘Spinner’ is presented in fig. 4.
Figure. 4 Body Specifications of quadricycle ‘Spinner’
The different specifications of quadricycle ‘Spinner’ are given below.
VEHICLE DESIGN SPECIFICATIONS:
Length of the vehicle : 2600 mm
Height of the vehicle : 1430 mm
Width of the vehicle : 1440mm
Wheel base : 1510mm
Track width : 1200mm
Front overhang : 600mm
Rear overhang : 490mm
Ground Clearance : 300mm
Fuel Tank Capacity : 5Liters
Seating Capacity : 2
Engine Specifications
No of Cylinders : 3
Valve Mechanism : SOHC
Cylinder Configuration : Inline
Valves per Cylinder : 2
Fuel System : Carburetor
Torque : 56 Nm @ 2500 rpm
Displacement : 796cc
Power : 35 PS @ 5000 rpm
STEERING: FOUR-WHEEL-STEERING (ALL WHEEL STEERING)
Steering Type : Manual
Minimum Turning Radius : 2.9m
TRANSMISSION:
Clutch : Single Plate Dry
Transmission Type : Manual
Number of Gears : 4 Forward Synchromesh and
Subrahmanyam Vasamsetti, Rajasekhar Sandhi, Raja Sekher Jagathani and Aruna Kunda
http://www.iaeme.com/IJMET/index.asp 671 [email protected]
1 Reverse Sliding mesh
Drive : Front wheel with drive shafts
Wheels &Tyres : Tyres 145 / 70 R-12
Wheel Size : 12inch
Wheel Type : Disc made with Steel
Rear Suspension : Leaf spring
Front Suspension : Mac pherson strut and coil spring
Rear Brakes : Disc
Front Brakes : Disc
3.1. Vehicle Performance
The vehicle was tested for a distance of 1000km between Kakinada and Rajahmundry cities in
India and found a mileage of 28 km per litre. The mileages obtained were presented in the table
1.
Table 1 Mileage at different conditions.
S. No. Type of the Road Mileage observed in km/litre
1 Highway 29.3
2 City ride 21.2
3 Overall 25.6
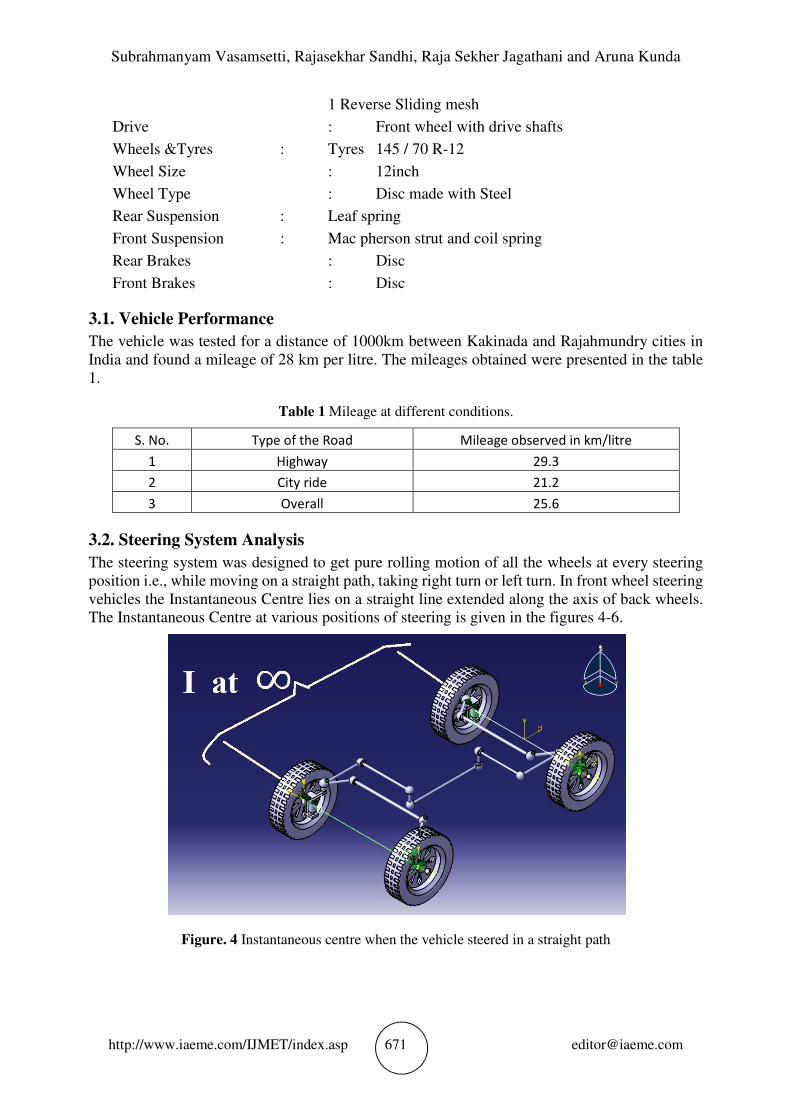
3.2. Steering System Analysis
The steering system was designed to get pure rolling motion of all the wheels at every steering
position i.e., while moving on a straight path, taking right turn or left turn. In front wheel steering
vehicles the Instantaneous Centre lies on a straight line extended along the axis of back wheels.
The Instantaneous Centre at various positions of steering is given in the figures 4-6.
Figure. 4 Instantaneous centre when the vehicle steered in a straight path

Modeling, Fabrication and Anaysis of Four Wheel Steering System to Quadricycle Named Spinner
http://www.iaeme.com/IJMET/index.asp 672 [email protected]
Figure. 5 Instantaneous centre when the vehicle is taking full right turn
Figure. 6 Instantaneous centre when the vehicle is taking full left turn
Subrahmanyam Vasamsetti, Rajasekhar Sandhi, Raja Sekher Jagathani and Aruna Kunda
http://www.iaeme.com/IJMET/index.asp 673 [email protected]
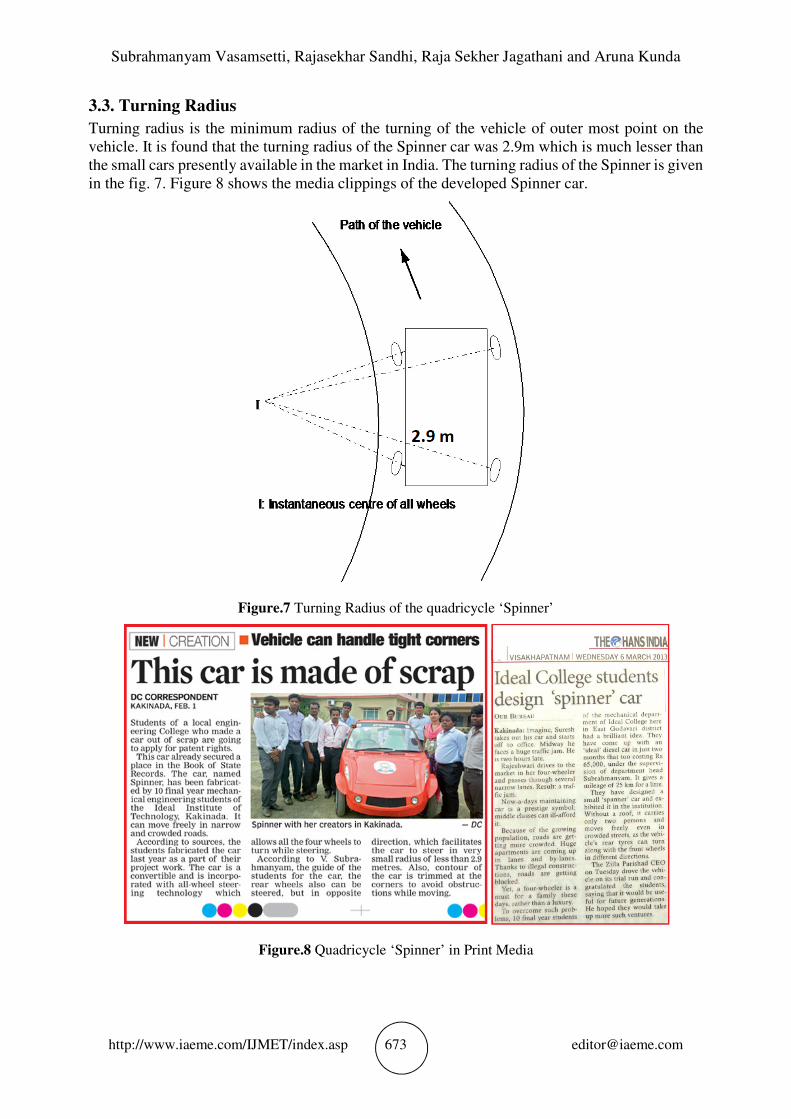
3.3. Turning Radius
Turning radius is the minimum radius of the turning of the vehicle of outer most point on the
vehicle. It is found that the turning radius of the Spinner car was 2.9m which is much lesser than
the small cars presently available in the market in India. The turning radius of the Spinner is given
in the fig. 7. Figure 8 shows the media clippings of the developed Spinner car.
Figure.7 Turning Radius of the quadricycle ‘Spinner’
Figure.8 Quadricycle ‘Spinner’ in Print Media
Modeling, Fabrication and Anaysis of Four Wheel Steering System to Quadricycle Named Spinner
http://www.iaeme.com/IJMET/index.asp 674 [email protected]
4. CONCLUSIONS
• The developed quadricycle ‘Spinner’ is equipped with two seats and a luggage boot.
The corners are trimmed and front and rear overhangs are reduced. This design helps
to pass the vehicle through rush roads and narrow roads very easily. So the vehicle
can decrease the traffic problems and also parking problems considerably.
• The vehicle weighs 300 kg and is equipped with 3 cylinder, 4 Stroke, Water cooled,
carburetor petrol engine for better pick up and got a mileage of 25.6 km per litre.
• The back wheels are coupled to steering system which allows them to steer in the
direction reverse to front wheels. This all wheel steering mechanism is the unique
feature of this Spinner vehicle which facilitates all the wheels can steer about a
common Instantaneous Centre. This feature allows the driver can steer the car with
least effort, decreases the turning radius about 2.9 m and enhances the tyre and
bearings life. Moreover it is safer than ordinary steering.
5. FUTURE SCOPE
Even a high capacity bike engine like pulser 200 CC or even 150CC engine can pull this car
easily to get better mileage at the expense of pick up. Another better option is a two cylinder 1000
CC Diesel engine which decreases running cost considerably. This quadricycle is a low budget
car made at a cost of Rs.65, 000/-. The cost of the car will further decrease in mass production.
With this project it is suggested that the two wheeler manufacturers can produce this type of cars
which has great potential in the middle to lower income group countries such as India, Srilanka,
Bangladesh, Pakisthan etc. Definitely it can grasp some part of 2-Wheeler market. The boot space
can be replaced by two more seats to meet the need of consumers. Moreover it fulfills the dream
of middle to lower class people to afford a car.
REFERENCES
[1] Tahami, F., Farhangi, S and Kazemi, R, A fuzzy logic direct yaw-moment control system for
all-wheel-drive electric vehicles, Vehicle System Dynamics, 41(3), 2004, 203-221.
[2] Dinesh, S., Murugan, V.S., Jagannathan, R., Aarvindakshaan, S., Kumar, N.N., and Robin,
J.R., Steering and constant steer test analysis of FSAE vehicle using CARSIM, International
Journal of Mechanical Engineering and Technology (IJMET), 8(10), 2017, 928-935.
[3] Malu, D., Katare, N., Runwal, S., and Ladhe, S., Design methodology for steering system of
an ATV, International Journal of Mechanical Engineering and Technology (IJMET), 7(5),
2016, 272-277.
[4] Subrahmanyam, B., Bridjesh, P., and Madhu, S., Manufacturing of steering components for
a race car, International Journal of Mechanical Engineering and Technology (IJMET), 8(6),
2017, 207-211.
[5] Tahami, F., Kazemi, R., and Farhanghi, S., A novel driver assist stability system for all-wheel-
drive electric vehicles, IEEE Transactions on Vehicular Technology, 52(3), 2003, 683-692.
[6] Galmarini, G., Gobbi, M., and Mastinu, A quadricycle for urban mobility, Proc. of the ASME
2012 International Design Engineering Technical Conferences & Computers and Information
in Engineering Conference, Chicago, IL, USA, 2012, 1-8.
[7] Furukawa, Y., Yuhara, N., Sano, S., Takeda, H., and Matsushita, Y., A review of four-wheel
steering studies from the viewpoint of vehicle dynamics and control, Vehicle System
Dynamics, 18 (1), 1989, 151-186.
[8] Santis, M.D., Agnelli, S., Silvestri, L., Ilio, G.D., and Giannini, O., Characterization of the
powertrain components for a hybrid quadricycle, International Conference of Numerical
Analysis and Applied Mathematics, 2015, 270007-1 to 4.
Subrahmanyam Vasamsetti, Rajasekhar Sandhi, Raja Sekher Jagathani and Aruna Kunda
http://www.iaeme.com/IJMET/index.asp 675 [email protected]
[9] Castelli, D.F., Galmarini, G., Gobbi, M., and Mauri, M., Design and realization of a
quadricycle for urban mobility, Proc. of 9th International Conference and Exhibition on
Ecological Vehicles and Renewable Energies (EVER), 2014, 1-8.
[10] Wasielewski, P. and Evans, L., Do drivers of small cars take less risk in everyday driving,
Risk Analysis, 5(1), 1985, 25-32.
[11] Whitehead, J.C., Four wheel steering: Maneuverability and high speed stabilization, SAE
International, 2018, 1-5.
[12] Cignini, F., Ortenzi, F., Rossi, E., and Virginio, S., Spazia-HPP: Hybrid plug-in for small
vehicle, Proc. 69th Conference of the Italian Thermal Machines Engineering Association,
ATI2014, Energy Procedia, 2015, 81, 108-116.
[13] Cotana, F., Nicolin, A., and Goretti, M., Improvements in noise mitigation of a postal delivery
service: a comparison among hybrid, electric and conventional vehicles, Inter-noise 2009,
Ottawa, Canada, 1-9.
[14] Pavlovic, A., Fragassa, C., and Miranda, S.D., Numerical simulation of crash test for the
heavy quadricycle, Proc. of Intenational Congress Motor Vehicles & Motors, 2014, 445-452.
[15] Wang, D. and Qi, Feng. Trajectory planning for a four-wheel-steering vehicle, Proc. of
International Conference on Robotics &Automation, 2001, 1-6.