modellierung der kovarianzmatrix von rim beobachtungen zur
TRANSCRIPT

Modellierung der Kovarianzmatrix von RIM Beobachtungen zur Deformationsanalyse von Bauwerken
Stefan Lederbauer
INTERGEO, Hannover, 10. Oktober 2012

2
Range Imaging (RIM)
10.10.2012SLE_20121010(Hannover)_V01.pptx
simultan, für jedes Pixel

3
Range Imaging (RIM)
10.10.2012SLE_20121010(Hannover)_V01.pptx
simultan, für jedes Pixel

4
Distanzkameras
10.10.2012SLE_20121010(Hannover)_V01.pptx
• Unterscheidung nach Methodik der Distanzmessung Großteil der kommerziell verfügbaren Distanzkameras: Phasenvergleichsverfahren
2 23 1 0 2
1 ( ) ( )2
A I I I I 3 1
0 2
atandI II I
4dd
• Jedes Pixel tastet die Intensität an 4 (oder 8) Stellen innerhalb einer Periode ab;
• Daten werden über viele Perioden akkumuliert (“Integrationszeit”)
Quelle: Kahlmann, 2006
cos( )n d nI C A 2 0,1, , 1n n n NN

5
Varianz der Messwerte• Lineare Varianzfortpflanzung, angewendet auf dieses Modell liefert:
10.10.2012SLE_20121010(Hannover)_V01.pptx
14D IA
12A I
[m] 0.003 11D A
… Kamera
… beinflussbar
1 21
D C CA
Camcube-IG /TUW
• Brauchbare Näherung:

6
Experiment: Monitoring einer Brücke
10.10.2012SLE_20121010(Hannover)_V01.pptx
Zielsetzung
Aufnahmesituation
Rohdatenaufzeichnung
Räumliche Filterung
Parametrisierung d. Deformationen
Ausgleichsmodell
Ziel: Detektion kurzfristiger Vertikalbewegungen mit mm-Größenordnung
Parameter CamCube 2.0
Pixelanzahl 204 x 204
Gesichtsfeld 40° x 40°
Messrate max. 25 Hz
Wellenlänge 870 nm
Modulationsfrequenz 18 – 21 Mhz
Distanzbereich 0.3 – 7.5 m

7
10.10.2012SLE_20121010(Hannover)_V01.pptx
Experiment: Monitoring einer Brücke
Zielsetzung
Aufnahmesituation
Rohdatenaufzeichnung
Räumliche Filterung
Parametrisierung d. Deformationen
Ausgleichsmodell
S
N
totalstation
Camcube
steel girder
• CamCube ~1.5 m unter Stahlträger
• Distanz zu den nächstliegenden Pfeilern: ~10m bzw. 25 m
• Totalstation Leica TCRP1201 für Referenzmessungen

8
10.10.2012SLE_20121010(Hannover)_V01.pptx
Experiment: Monitoring einer Brücke
Zielsetzung
Aufnahmesituation
Rohdatenaufzeichnung
Räumliche Filterung
Parametrisierung d. Deformationen
Ausgleichsmodell
• Messung bei Nacht (Hintergrundlicht)
• Aufzeichnung von Umgebungs- und Sensortemperatur
• Messdauer: ca. 1,5 Stunden (Aufwärmphase)

9
10.10.2012SLE_20121010(Hannover)_V01.pptx
Experiment: Monitoring einer Brücke
Zielsetzung
Aufnahmesituation
Rohdatenaufzeichnung
Räumliche Filterung
Parametrisierung d. Deformationen
Ausgleichsmodell
Ansatz: Definition von ebenen Patches über Regionen (ROIs) im Bild
(6)
(1)
(2)
(3)
(4)
(5)

10
10.10.2012SLE_20121010(Hannover)_V01.pptx
Experiment: Monitoring einer Brücke
Zielsetzung
Aufnahmesituation
Rohdatenaufzeichnung
Räumliche Filterung
Parametrisierung d. Deformationen
Ausgleichsmodell
• Translation des Ebenensegments (z)
• Richtungsänderung des Normalvektors (νx, νy)
(1)

11
10.10.2012SLE_20121010(Hannover)_V01.pptx
Experiment: Monitoring einer Brücke
Zielsetzung
Aufnahmesituation
Rohdatenaufzeichnung
Räumliche Filterung
Parametrisierung d. Deformationen
Ausgleichsmodell
e
Annahme: Pixelindizes fehlerfrei, Abweichungen der 3D-Koordinaten ergeben sich wegen der Distanzabweichungen
VKM der Koordinaten ist singulär (Rang n bei Dimension 3n)
Optimale Lösung:
• GHM oder GMM mit Verbesserung nur in Richtung der Projektionsstrahlen
• Berücksichtigung der unterschiedlichenPräzision der einzelnen Punkte

12
Vertikalbewegung der Brücke (4 ROIs)
• Vertikalbewegung ~15 mm bei Zugüberfahrt
• STD der RIM Resultate @ 14 fps:~0.6 mm (vertikal)
10.10.2012SLE_20121010(Hannover)_V01.pptx
(1)
(2)
(3)
(4)

13
• Theoretischer Amplitudenabfall für Stahlfläche (Abstand: 1,4m)
10.10.2012SLE_20121010(Hannover)_V01.pptx
Erwartete Präzision der ROIs• Präzision der geschätzten z-Translation hängt ab von:
Amplitude ROI-Größe
Dimension ROI-Brücke: ~ 4000 (63x63) Pixel
Empirische Std.
Prädizierte Std.
Ursache: Korrelation der Distanzabweichungen
Stimmt NICHT überein!
• ROIs: quadratisch um zentrales Pixel
14
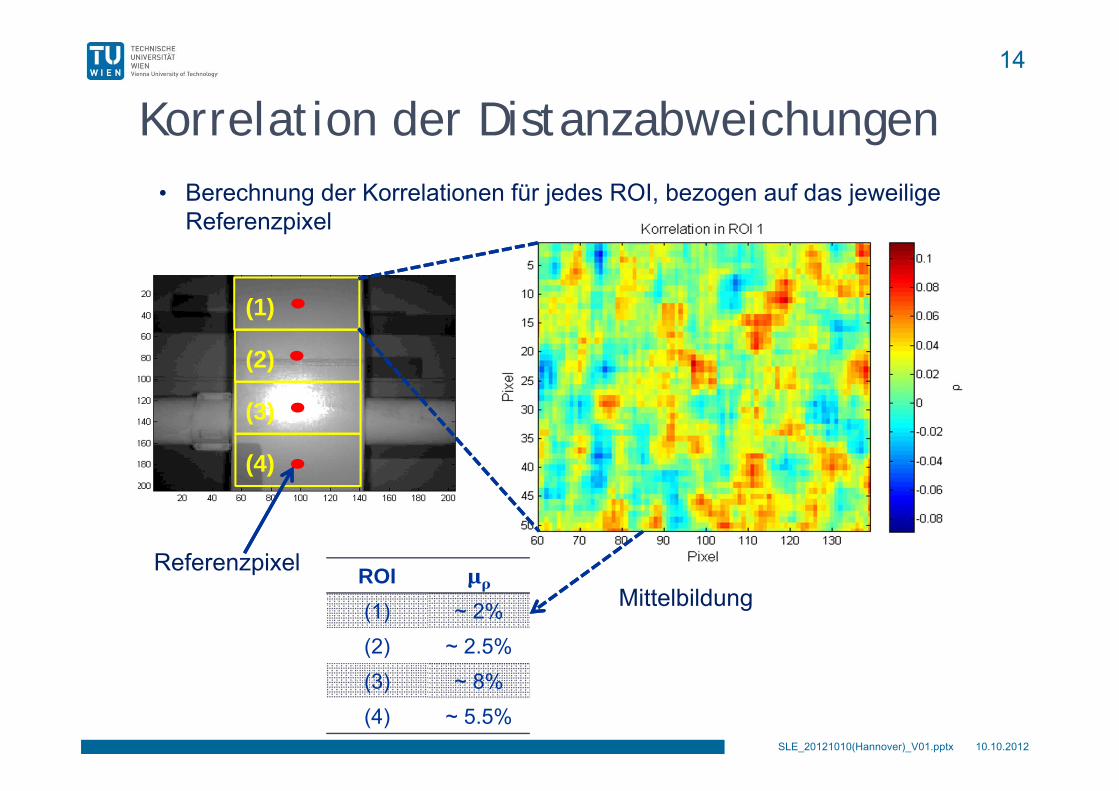
• Berechnung der Korrelationen für jedes ROI, bezogen auf das jeweilige Referenzpixel
Korrelation der Distanzabweichungen
10.10.2012SLE_20121010(Hannover)_V01.pptx
(1)
(2)
(3)
(4)
ROI μρ(1) ~ 2%(2) ~ 2.5%(3) ~ 8%(4) ~ 5.5%
ReferenzpixelMittelbildung
15
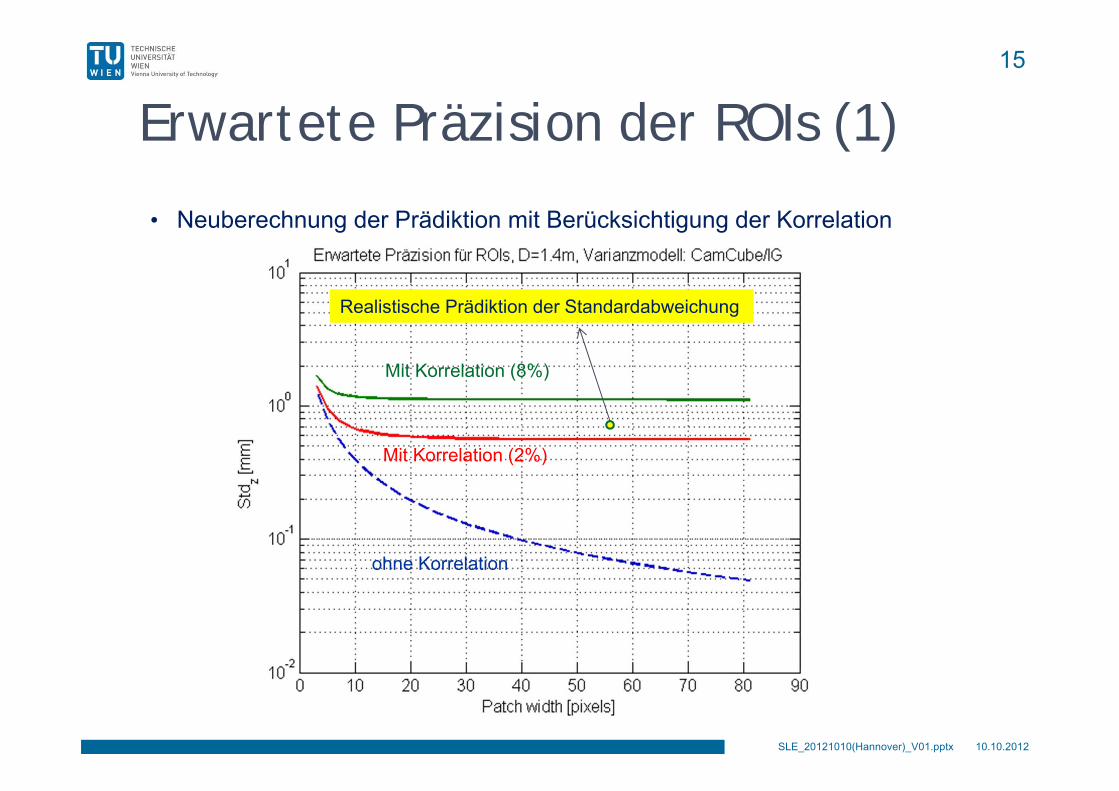
• Neuberechnung der Prädiktion mit Berücksichtigung der Korrelation
Erwartete Präzision der ROIs (1)
10.10.2012SLE_20121010(Hannover)_V01.pptx
Mit Korrelation (2%)
ohne Korrelation
Mit Korrelation (8%)
Realistische Prädiktion der Standardabweichung

16
Zusammenfassung
10.10.2012SLE_20121010(Hannover)_V01.pptx
• Distanzkameras liefern kompletten „Schnappschuss der Umgebung“
• Erreichbare Genauigkeit für 3D-Koordinaten (Einzelpunkt) im mm-cm Bereich
• Bewegungen mit mm-Größenordnung und Frequenz von einigen Hz nachweisbar
• Mögliche Anwendung: Überwachung von Oberflächendeformationen z.B. an Bau- oder Maschinenteilen
17
10.10.2012SLE_20121010(Hannover)_V01.pptx
Vielen Dank für Ihre Aufmerksamkeit!
Vielen Dank für Ihre Aufmerksamkeit!