modelo de un motor de dc.docx
TRANSCRIPT

7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 1/18
[MODELO DE UNMOTOR DE
CORRIENTE DIRECTA]Se muestra el modelo matemático del motor.

7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 2/18
MODELO DEL MOTOR DC
ea= Ra ia+ La
di
dt +eb ;eb= K b
dθ
dt = K b w
T m= K t ia=J d
2
θ
d t 2 + f
dθ
dt +T L=J
dw
dt + fw+T L
Donde:
θ → Posiciónangular enradianes
w→velocidad angularen rad
seg ;w=
dθ
dt
recordarqueθ=∫wdt =1
Sθ (S )
ia
→ corriente de armadura en Amerios
T m→Torquegeneradoor elmotor ( !ewtons−metro)
T L →torquedecarga (newtons−metro)

7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 3/18
K b →"onstante de velocidad
K t →"onstante de torque
J→ #nerciadel e$e delmotor
f → fricciónviscosadel e$e del motor
La→ #ductanciade armadura
Ra → Resistencia dearmadura
ea→volta$edearmadura
Se definen como variables de estado la velocidad angular (w) y la corriente de
armadura
i
(¿¿ a)¿
, lo cual nos permite describir el sistema en forma de ecuación de
estado:
d ia
dt =
ea
La
− Ra
La
ia− K b
La
w
dw
dt =
K t
J ia−
f
J w−
T L
J
Reescribiendo en forma matricial:´ %= A%+&u

7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 4/18
[ d ia
dt
¿dw
dt ]=[
− Ra
La
¿− K b La
¿ K t J
¿− f
J ][ ia¿w ]+[
1
La
¿0
¿0 ¿−1
J ][ ea
¿T L ]
variables de estado : %1=ia ' %2=w
entradas : u1=ea ' u2=T L
La salida del sistema depende de las variables de estado que se lean por medio de los
sensores. Si se lee solamente la velocidad, la salida del sistema es (=w= %2 ;
escribiendo en forma matricial:
(=[ 0 1 ] [ ia
w]=[ 0 1 ] [ %1
%2]
Diagrama de representación en ecuación de estado
Haciendo la transformada de Laplace de las ecuaciones de estado:
La S ) # ( S )=ea ( S )− Ra ) # ( S )− K b )* ( S )

7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 5/18
# ( S) ( LaS+ Ra )=ea(S)− K b )* (S)
De la segunda ecuación de estado:
JS)* ( s)= K t ) # (S )−f )* ( S )−T L(S)
* (S ) ( JS+ f )= K t ) # (S )−T L (S )
Datos Técnicos del Motor:
abricado por la compa!"a #a$on #otor.
#otor %&ma$ '(
)olta*e +ominal -()
otencia +ominal -/0
)elocidad +ominal 1/23 rpm
4orque m5$imo continuo '6.( m+m
#5$ima corriente continua -./6%
7orriente de %rranque 1.3-%

7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 6/18
Ra (.228 9Resistencia de armadura
1-.1gr.cm( 1.-1<-3&= >g.m( 9?nercia del rotor
La 1(3@H 9inductancia de armadura
f -<-3&6 9fricción viscosa
>b (1.- m+mA% 1-.1B radAsA) (1.2=<-3&' )ArdAs 9constante de velocidad
>t (1.-<-3&' +mA% 9constante de torque
Se escribe el siguiente código en matlab, para ver la respuesta transitoria del motor ante
entrada escalón de -( voltios, puesto que es el volta*e nominal, y determinar cu5l es la
velocidad ante volta*e nominal.
%% MOTOR DC
Ra=2.99; %resistencia de armadura(ohms)
La=420e!; %inductancia de armadura(")
#=$e; %
&=4.$4e!; % inercia de' rotor(*m+2)
,=24.9!e-; % constante de e'ocidad (/(radse))
t=24.$e-; %constante de tor1ue (*mam3)
% aria,'es de estado
% 5$=6a% 52=7
% 8ntradas
% $=/a o'ta:e de armadura
% 2=T' Tor1ue de cara
m=<RaLa ,La
t& #& ;
>m=<$La 0;
0 $& ;
Cm=<0 $;
Dm=<0 0;

7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 7/18
?ss=ss(m@>m@Cm@Dm)% ecuacion de estado
ei(m)% /a'ores 3ro3ios(3o'os)
?tA=tA(?ss)%Auncion de transAerencia
%%
?$$=?tA($@$); %78a
?$2=?tA($@2); %7T'
?$$=B3(?$$)% er en Aorma ceros@ 3o'os @ anancia
La función de transferencia de velocidad contra volta*e de armadura es:
* (S )ea(S)
= 13860133.4254
( S+7070 )(S+48.93)
Se puede ver que el polo es &B3B3 es despreciable puesto que est5 muy le*os en
comparación con el polo en &16.2', entonces se puede Cacer la apro$imación a un sistema
de primer orden, entonces se quita el polo y se divide la ganancia entre el valor del polo:
* (S )e
a(S)
=1960.4149
(S+48.93
)
; + = 1
48.93=20.4mseg
Luego, la respuesta ante escalón de -( voltios es:
% 1uitando 3o'os 'e:anos
%a3roimando ?$$E 78a
?$$=B3(<@<4.9-@$-!0$--.42F4G0G0) %Bero@ 3o'e@ain
ste3($2*?$$)

7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 8/18
La velocidad en estado estacionario es de480.66
rad
seg , para convertir a rpm:
velenrm=480.66 30, =4590 rm
ara sensar la velocidad del motor se usa un convertidor frecuencia a volta*e, el cual recibe
la se!al del encoder incremental incorporado al motor.
Digital Encoder. Se utilió un encoder digital fabricado por la compa!"a #a$on #otor cuya referencia es HEDL //13 con mane*ador de l"nea.

7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 9/18
igura (2. Encoger digital
Datos tFcnicos:
)cc /)
Se!al de salida: E?% est5ndar RS1((
+Gmero de canales: ( pulso "ndice.
7orriente de fase: 23I
ulsos por revolución: /33
7orriente de salidaAcanal: &- a (3m%
#5$ima frecuencia de operación: -33>H.
De acuerdo a la velocidad m5$ima del motor, Jbtenemos la m5$ima frecuencia de
operación:
/.B==3
1/23
1/23
==
=
seg
rpmrps
rpmWn
7omo el encoder proporciona /33 pulsosArevolución entonces:

7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 10/18
seg P seg
rev
rev
P A'6(/3
/.B=<
/33=
Entonces f m5$ '6.(/>H
Tacómetro. Es el convertidor recuencia&)olta*e fabricado por la +ational Semiconductor.
Su referencia es L#(23B.
igura '3. 7onvertidor recuenciaA)olta*e
)out )cc<f in<7-<R-
f ma$ VccC
I
<-
(
;
?( -63u% para )cc -( )ol 9Se obtiene de las curvas de operación del D
Si se toma f ma$ 13>H 9un poco por arriba sólo para el dise!o del sensor
Entonces 7-
pF pF pF V KHz
uA''''3'B/
-(<13
-63+==

7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 11/18
Se necesita que la caracter"stica del sensor sea:
R1 =
Ω== K pF KHz V
V
C Vcc
Vout
IN
'3'='<(/.'6<-(
/
-<f <
NOTA: la dinámica de un sensor siempre debe ser mucho más rápida que ladinámica de la planta que va a medir con el fn de que la dinámica del sensor
sea despreciable en la práctica se busca que la dinámica del sensor sea por lo
menos 1! veces más rápida.
R1"
2-
+
10
; El
mste generalmenesmotor (3≈τ
Luego, para que la din5mica del convertidor A) sea despreciable se Cace que:
R-<7( K (ms
7(
nF nF K
ms=6==
'3
(≈=
Ω

7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 12/18
Circuito para detectar el sentido de giro del motor:
Se dise!ó con el flip&flop D B1LSB1.
)elocidad positiva: )elocidad negativa:
Los filtros de entrada son para filtrar el ruido, sólo de*an pasar la onda cuadrada pura que
genera el encoder.
7omo se observa en los diagramas de tiempo, 3 para velocidad negativa; - para
velocidad positiva.

7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 13/18
Actuador (Puente !
igura (/. uente H. L#-6(33
Se emplea el 7? L#D-6(33 fabricado por +ational Semiconductor. Este integrado
contiene un puente H interno a base de oMer #osfet, lo cual permite que el motor gire en
dos direcciones. 4iene una entrada de se!al 0#, una entrada de dirección y una entrada
de NraOe.
• Dirección: Es una entrada que controla la dirección del flu*o de corriente entre out- y
out( y por lo tanto la dirección de rotación del motor.
• La se!al de entrada P"M es suministrada por el microcontrolador y con ella logramos
variar el ciclo Gtil de la se!al de salida desde 3P a -33P lo que equivale a variar el
volta*e promedio aplicado al motor en un rango entre 3 )oltios y -( )oltios. Si elcontrolador es analógico es necesario un circuito integrado que convierta la se!al
analógica de control a 0# como el Q7(='B. %l final del documento se muestra el
dise!o con el Q7(='B.
• #RA$E: Es una entrada del L#-6(33 utiliada para impedir la destrucción del puente
H por sobrecorriente y se activa con nivel lógico alto. La salida que sensa la corriente
tiene una sensibilidad de 377µA/A; tomando como referencia esa sensibilidad se dise!ó
el circuito de protección de tal manera que cuando la corriente de salida sea mayor a 1%mperios se active un comparador que env"a un nivel lógico alto a la entrada NraOe del
L#-6(33 protegiendo al motor de sobrecorriente.
Figura 26. Protección de sobrecorriente

7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 14/18
MODELO DE LA PLA%TA
La planta en el sistema de control es el con&unto actuador'motor'sensor
El sensor utiliado tiene la siguiente caracter"stica lineal:
srad V m AA-3<31.-=='.163
/ (−==
El actuador utiliado es un puente H con una ganancia de (.1 9%v-(A/(.1.

7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 15/18
Con&unto Actuador'Motor'ensor:
Es decir que el modelo de nuestra planta para Cacer el sistema de control es:
. (S)/ (S)
= 48.93
S+48.93=0(S )
%ota: )a* +ue tener en cuenta +ue la m,-ima seal de control esu=1 5 voltios
para
e/itar la saturación del actuador0 * +ue cuando la seal de saliday
es igual a 1
/oltios se tiene la m,-ima /elocidad del motor (234.55 rad6seg!.

7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 16/18
Modulador PWM. Es implementado con el !2637 "abricado por la #e$as%nstruments & la con"iguración & e$plicación est'n dados a continuación.
Figura 22. (odulador P)(.
*a necesidad del restador antes del !2637 es que debido a que el !2637 est'
alimentado con "uente simple+ necesita tener como ,re" - ,cc/2+ para poder realiar la
modulación correctamente.
As+ cuando la se0al an'loga es cero+ la salida del restador es ,cc/2; & al aumentar &
llegar a un m'$imo de 1,+ la salida del restador es oltio.
Figura 23. 4ango de traba5o del modulador P)(
7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 17/18
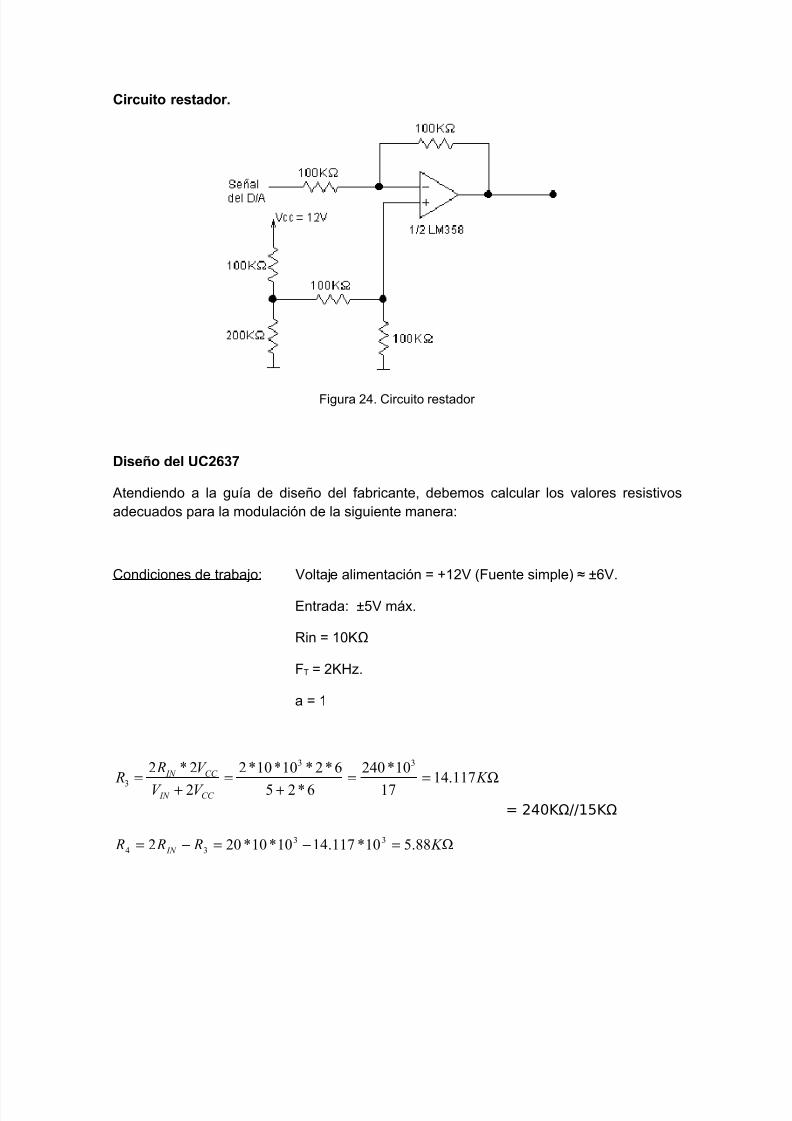
Circuito restador.
Figura 2. !ircuito restador
Diseño del UC2637
Atendiendo a la gua de dise0o del "abricante+ debemos calcular los alores resistios
adecuados para la modulación de la siguiente manera
!ondiciones de traba5o ,olta5e alimentación - 82, 9Fuente simple: <6,.
Entrada <1, m'$.
4in - =>?
F# - 2>@.
a -
Ω==+=+= K
V V
V R R
CC IN
CC IN --B.-1
-B
-3<(13
=<(/
=<(<-3<-3<(
(
(<( ''
'
= "#!$%&&1'$%
Ω=−=−= K R R R IN 66./-3<--B.-1-3<-3<(3( ''
'1

7/25/2019 MODELO DE UN MOTOR DE DC.docx
http://slidepdf.com/reader/full/modelo-de-un-motor-de-dcdocx 18/18
V R
RV V
IN
CC R B=1.-
-3<(3
-3<(62.'/
-3<(3
-3<66./<=
(
<
'
'
'
'
1 ====
V V V RTH B=1.-==
Ω=
−=
−
= K V Vcc
V R R
TH
TH B/B.--
B=1.-=
B=1.--3<--B.-1<((
'
'(
Ω== K R R --B.-1'-
Ω=+
=+
= K mAmA
V Vcc R TH
T /(6.-//.3
B=1.-=
/.3
nF nF KHz
mA
VR f
mAC
T
T ''1.'/-3<3'/.3B=1.-<(<1
/.3
<1
/.3 =≈====
−