modélisation de l’association convertisseur-machine pour
TRANSCRIPT
HAL Id: hal-01577794https://hal.archives-ouvertes.fr/hal-01577794
Submitted on 28 Aug 2017
HAL is a multi-disciplinary open accessarchive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come fromteaching and research institutions in France orabroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, estdestinée au dépôt et à la diffusion de documentsscientifiques de niveau recherche, publiés ou non,émanant des établissements d’enseignement et derecherche français ou étrangers, des laboratoirespublics ou privés.
Modélisation de l’association convertisseur-machinepour la bibliothèque de simulation des Îhicules VEHLIB
Rochdi Trigui, Bruno Jeanneret
To cite this version:Rochdi Trigui, Bruno Jeanneret. Modélisation de l’association convertisseur-machine pour la biblio-thèque de simulation des Îhicules VEHLIB. [Rapport de recherche] IFSTTAR - Institut Français desSciences et Technologies des Transports, de l’Aménagement et des Réseaux. 2001, 51 p. hal-01577794

Rochdi TRIGUI Bruno JEANNERET
Modélisation de l’association convertisseur-machine électrique pour la bibliothèque de simulation des véhicules VEHLIB.
Rapport LTE N°0103 Février 2001
Auteur : Rochdi TRIGUI Chargé de recherche, Véhicules électriques et hybrides. Bruno Jeanneret Ingénieur d’étude, Véhicules électriques et hybrides.
Laboratoire de recherche : INRETS - LTE, Laboratoire Transports et Environnement 25 avenue François Mitterrand, case 24, 69675 BRON cedex - France
Fiche bibliographique
1 UR (1er auteur) LTE
2 Projet n°
3 Rapport INRETS n° LTE 0103
4 Titre Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB. 5 Sous-titre
6 Langue F
7 Auteur(s) Rochdi TRIGUI Bruno JEANNERET
8 Rattachement ext.
9 Nom adresse financeur, co-éditeur
10 N° contrats, conv.
11 Date de publication
12 Remarques 13 Résumé Ce travail représente une contribution à l’élaboration de la bibliothèque de simulation de véhicules VEHLIB. Il traite spécialement de l’organe machine électrique associée à son convertisseur. Trois types de modèles sont identifiés et mis en œuvre sous l’environnement Matlab Simulink. Le premier, de type énergétique statique, présente un intérêt évident pour le temps de calcul sur des cycles longs mais ne reflète pas un comportement fiable au niveau des variables physiques influentes (température, variation de la tension continue, séparation des pertes, comportement dynamique …). Le deuxième, de type électrique dynamique, représente une bonne fiabilité par rapport aux phénomènes physiques mais nécessite un temps de calcul très long. Le troisième, de type électrique quasi-statique présente un compromis fiabilité temps de calcul et paraît particulièrement adapté à l’application de la simulation des véhicules. 14 Mots clés Véhicules, électrique, hybride, modélisation, simulation, convertisseur, machine électrique.
15 Diffusion large
16 Nombre de pages 51 pages
17 Prix ———— F
18 Confidentiel jusqu'au
19 Bibliographie
Table des matières __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
1
Table des matières
Introduction ............................................................................................................................... 3
Chapitre I : Formalisme de modélisation de l’ensemble convertisseur-machine pour la bibliothèque VEHLIB ............................................................................................................... 5
1. VEHLIB : bibliothèque de composants pour la simulation des véhicules ................................ 5
2. Présentation de l’ensemble convertisseur-machine selon le formalisme de VEHLIB............. 8
Chapitre II : Modèle énergétique quasi-statique pour tout type d’ACM .............................. 11 1. Le modèle énergétique statique .................................................................................................. 11
2. Synthèse du modèle amélioré sous Simulink............................................................................. 12
3. Précision du modèle selon le maillage ........................................................................................ 16
Chapitre III : Modèle électrique dynamique.......................................................................... 17 1. Principe et utilisation................................................................................................................... 17
2. Modèle dynamique de L’ACM continu ..................................................................................... 17
3. Modèle dynamique de L’ACM asynchrone............................................................................... 21
4. Modèle dynamique de L’ACM synchrone à rotor bobiné ....................................................... 24
Chapitre IV : Modèle électrique quasi-statique ..................................................................... 27 1. Principe et utilisation................................................................................................................... 27
2. Modèle quasi-statique de L’ACM continu ................................................................................ 27
3. Modèle quasi-statique de L’ACM aynchrone ........................................................................... 31
4. Modèle quasi-statique de L’ACM synchrone............................................................................ 34
Chapitre V : Comparaison et validité des différents types de modèles. ................................. 37 1. Comparaison des modèles électriques dynamique et quasi-statique : cas du moteur asynchrone........................................................................................................................................ 37
2. Comparaison des modèles énergétique et électrique quasi-statique : cas du moteur à courant continu ................................................................................................................................ 41
3. Récapitulatif : Avantages et inconvénients de chaque modèle ................................................ 42
Conclusion ............................................................................................................................... 45

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
2

Introduction __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
3
Introduction
L’approche de la simulation par modélisation est désormais bien répandue dans le milieu universitaire et industriel. Dans le domaine du transport, elle présente un intérêt économique considérable étant donné le coût que représente la réalisation d’un prototype de véhicule et la très grande complexité des architectures innovantes.
Dans le cadre du développement au LTE d’une bibliothèque de composants dédiée à la
simulation de tout type de véhicule (VEHLIB [Jeanneret 01], [Trigui 99]), plusieurs niveaux de modèles d’organes ont été réalisés sous l’environnement Matlab-Simulink®. Cet environnement, reconnu mondialement pour sa performance dans le calcul scientifique, a été choisi notamment pour sa structuration spécialement adaptée à l’approche systémique que nécessite la modélisation des véhicules.
Le travail présenté ici traite de la modélisation, pour VEHLIB, d’un organe particulier du véhicule qui est le moteur électrique associé à son convertisseur et sa commande. Ce moteur peut représenter le composant principal de traction (cas d’un véhicule tout électrique ou hybride série) comme il peut représenter un simple alternateur 12 V dans un véhicule conventionnel. Le niveau de complexité requis pour modéliser cet organe dépend essentiellement du type de simulation à effectuer, du temps de simulation toléré ainsi que de la précision requise. On distinguera trois niveaux de modèles :
- Modèle comportemental quasi-statique, dit aussi « cartographié » (Niveau 0) - Modèle électrique quasi-statique (Niveau 1) - Modèle électrique dynamique (Niveau 2) Après un chapitre dédié à une présentation brève de la bibliothèque VEHLIB et du
formalisme retenu pour la modélisation des organes, on a consacré dans ce rapport un chapitre pour chaque type de modèle de l’ensemble convertisseur machine avec la description de sa mise en œuvre sous Simulink®. Pour les deux derniers types de modèles, on distinguera le cas d’un moteur à courant continu, d’un moteur asynchrone et d’un moteur synchrone à rotor bobiné.

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
4

Chapitre I :Formalisme de modélisation de l’ensemble convertisseur-machine pour VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
5
Chapitre I : Formalisme de modélisation de l’ensemble convertisseur-machine pour la bibliothèque VEHLIB
1. VEHLIB : bibliothèque de composants pour la simulation des véhicules 1.1. Objectifs La bibliothèque de composants VEHLIB est en cours de développement au LTE (une première version sera disponible très prochainement). Elaborée sous l’environnement Matlab-Simulink elle présente plusieurs objectifs :
- Disposer d’un outil performant (précision, temps de calcul) et modulaire pour le développement de logiciels de simulation du fonctionnement de tout type de véhicules (conventionnel, électrique, hybride) légers et de transports en communs,
- Disposer d’une base de données sur les différents organes du véhicule, - Avoir plusieurs niveaux de modèles pour un même type de composant afin de pouvoir
traiter des applications spécifiques tels que : - la simulation du véhicule sur des trajets normalisés ou d’usage réel (plus ou
moins longs) pour un bilan énergie/pollution, - la simulation des régimes transitoires suite à l’association de moteur
thermiques et électriques (régulation de groupes électrogène par exemple), - la simulation en temps réel de transmissions hybrides sur un banc d’essai
dynamique, - la conception de stratégies de commandes optimisées.
1.2. Pourquoi Matlab-Simulink ?
Matlab® est un logiciel de calcul scientifique et de représentation graphique à deux et trois dimensions. Il présente un langage de programmation spécifique et contient des bibliothèques de fonctions pré-définies qui permettent à l’utilisateur une programmation rapide et efficace.
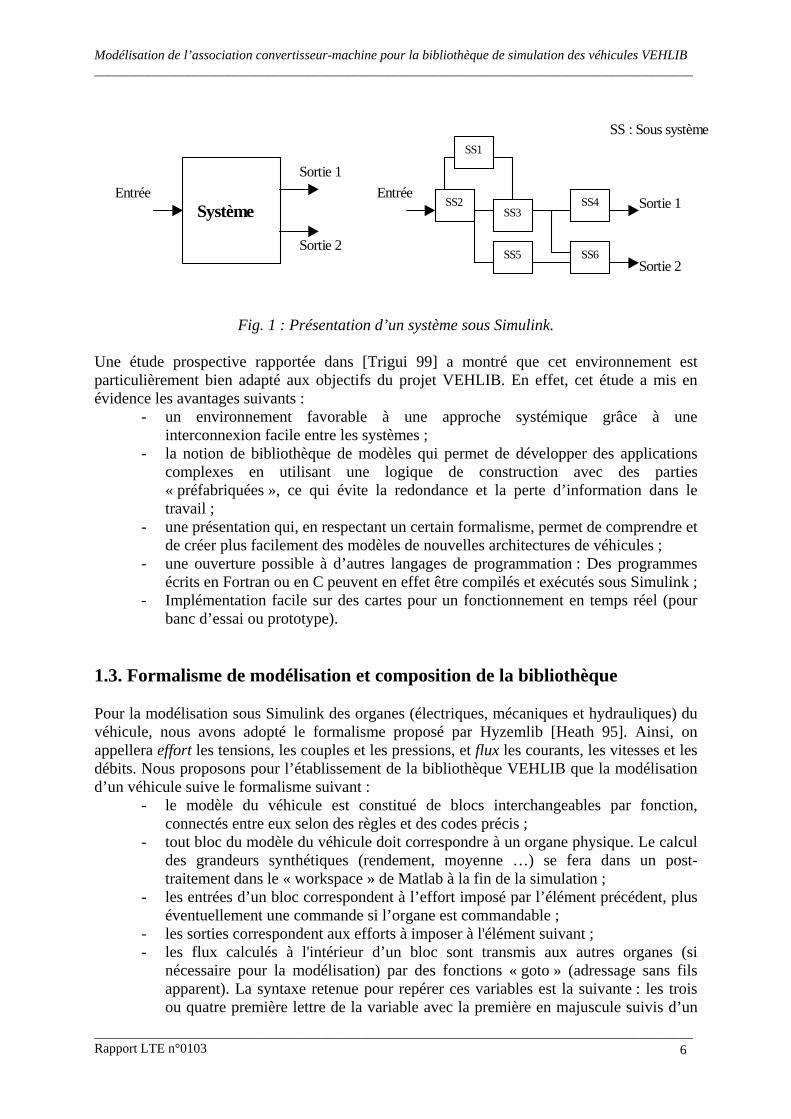
Simulink® est un utilitaire (appelé plus couramment « toolbox ») de Matlab orienté au départ vers l’automatisme et la régulation. Cet utilitaire se présente comme une bibliothèque de fonctions mathématiques, de fonctions de transferts continues ou discrètes et d’opérateurs linéaires ou non linéaires. L’interface avec l’utilisateur se présente sous forme d’une page de schémas blocs construits à partir des blocs de base disponibles dans la bibliothèque. Chaque bloc peut être lui même constitué de sous blocs et se connecte avec le bloc suivant par un trait reliant sa sortie à l’entrée du bloc suivant (fig. 1).
Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
6
Système
SS1
SS4
SS5 SS6
SS3SS2
EntréeSortie 1
Sortie 2
EntréeSortie 1
Sortie 2
SS : Sous système
Fig. 1 : Présentation d’un système sous Simulink.
Une étude prospective rapportée dans [Trigui 99] a montré que cet environnement est particulièrement bien adapté aux objectifs du projet VEHLIB. En effet, cet étude a mis en évidence les avantages suivants :
- un environnement favorable à une approche systémique grâce à une interconnexion facile entre les systèmes ;
- la notion de bibliothèque de modèles qui permet de développer des applications complexes en utilisant une logique de construction avec des parties « préfabriquées », ce qui évite la redondance et la perte d’information dans le travail ;
- une présentation qui, en respectant un certain formalisme, permet de comprendre et de créer plus facilement des modèles de nouvelles architectures de véhicules ;
- une ouverture possible à d’autres langages de programmation : Des programmes écrits en Fortran ou en C peuvent en effet être compilés et exécutés sous Simulink ;
- Implémentation facile sur des cartes pour un fonctionnement en temps réel (pour banc d’essai ou prototype).
1.3. Formalisme de modélisation et composition de la bibliothèque Pour la modélisation sous Simulink des organes (électriques, mécaniques et hydrauliques) du véhicule, nous avons adopté le formalisme proposé par Hyzemlib [Heath 95]. Ainsi, on appellera effort les tensions, les couples et les pressions, et flux les courants, les vitesses et les débits. Nous proposons pour l’établissement de la bibliothèque VEHLIB que la modélisation d’un véhicule suive le formalisme suivant :
- le modèle du véhicule est constitué de blocs interchangeables par fonction, connectés entre eux selon des règles et des codes précis ;
- tout bloc du modèle du véhicule doit correspondre à un organe physique. Le calcul des grandeurs synthétiques (rendement, moyenne …) se fera dans un post-traitement dans le « workspace » de Matlab à la fin de la simulation ;
- les entrées d’un bloc correspondent à l’effort imposé par l’élément précédent, plus éventuellement une commande si l’organe est commandable ;
- les sorties correspondent aux efforts à imposer à l'élément suivant ; - les flux calculés à l'intérieur d’un bloc sont transmis aux autres organes (si
nécessaire pour la modélisation) par des fonctions « goto » (adressage sans fils apparent). La syntaxe retenue pour repérer ces variables est la suivante : les trois ou quatre première lettre de la variable avec la première en majuscule suivis d’un

Chapitre I :Formalisme de modélisation de l’ensemble convertisseur-machine pour VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
7
traimât suivis des premières lettres désignant le bloc dans lequel elle est calculée. La couleur bleue claire est choisie pour distinguer ce type de variable. En revanche, les variables nécessaires à la commande seront transmises par des fils émanants de capteurs.
- les flux qui arrivent dans un bloc sont représentés par un bloc from (avec le vert comme code de couleur). Ce bloc assure la liaison avec les blocs goto quand la variable correspondante porte le même nom avec la syntaxe précisée plus haut.
Ainsi, seules les liaisons physiques entre les organes apparaîtront au premier niveau du modèle, ce qui confère à celui-ci une certaine qualité de lisibilité, notamment dans le cas d’une architecture complexe. L’introduction de la notion de capteurs permet de se rapprocher de l’aspect commande des organes et de ne pas perdre de vue la faisabilité et le coût des solutions étudiées.
La séparation, entre la simulation qui fournit les grandeurs utiles (effort et flux d’entrée et
de sortie), et le post-traitement qui établit les statistiques et les cumuls d’énergie, permet d’avoir des sous programmes standards par organe. VEHLIB profite de la structure de bibliothèque (library) disponible dans simulink. Elle se présente comme un ensemble de schémas blocs organisés par fonction comme le montre la figure 2.
Fig. 2 : Composition de la bibliothèque VEHLIB et du sous bloc composants.
Chaque sous ensemble de bloc (batteries, machines électriques …) contient les blocs de base qui représentent un modèle plus ou moins complexe de l’organe correspondant. Un « masque » du bloc permet d’associer à chaque organe le nom du fichier qui contient les données pour renseigner le modèle. Des sorties vers l’environnement de travail permettent à chaque bloc d’écrire l’évolution de ses grandeurs utiles dans le temps.
La synthèse d’un modèle complet de véhicule se fait par l’association dans une nouvelle page Simulink de différents blocs pris dans la bibliothèque (voir exemples en annexes 1 et 2). La modification d’un modèle dans la bibliothèque entraîne automatiquement sa remise à jour
Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
8
dans le modèle du véhicule. Cet option peut être évitée si on décide de rendre autonome un modèle de véhicule, il suffit alors de supprimer ses liens avec la bibliothèque (break library link).
Dans tout ce qui suit, on s’intéressera uniquement à l’organe moteur électrique associé à son convertisseur de puissance et à sa commande. Le détail des autres organes fait l’objet d’un autre document [Jeanneret 01].
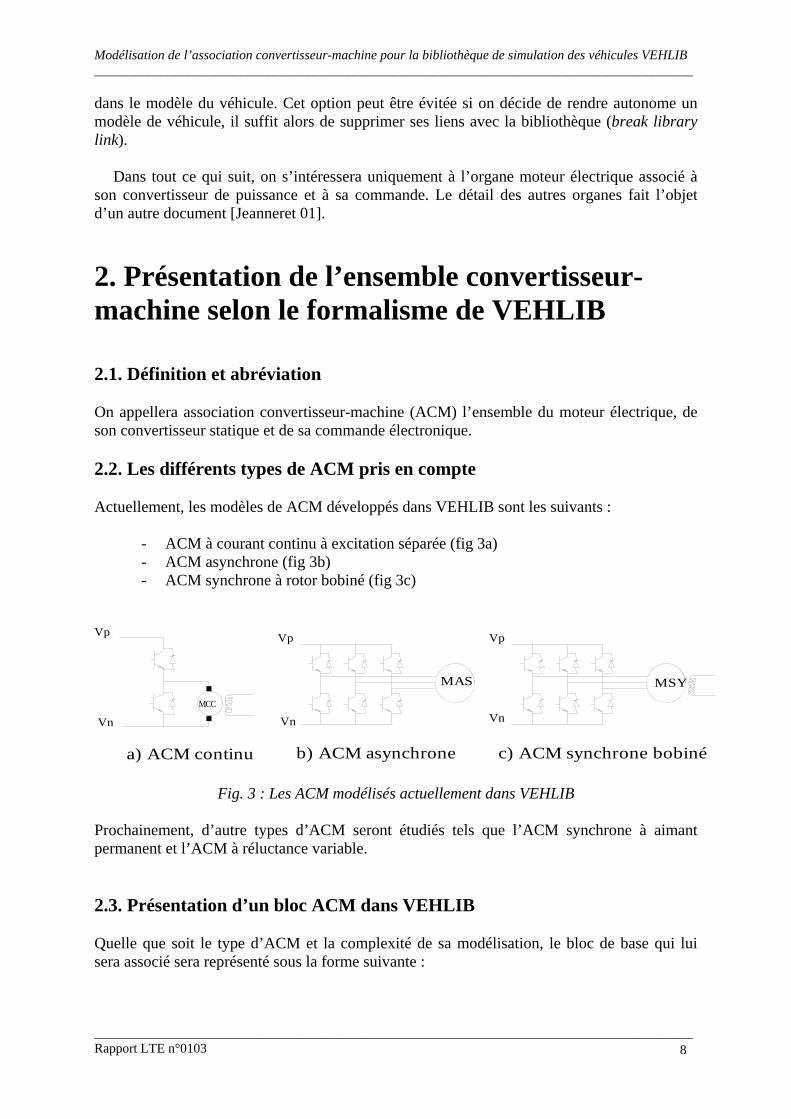
2. Présentation de l’ensemble convertisseur-machine selon le formalisme de VEHLIB 2.1. Définition et abréviation On appellera association convertisseur-machine (ACM) l’ensemble du moteur électrique, de son convertisseur statique et de sa commande électronique. 2.2. Les différents types de ACM pris en compte Actuellement, les modèles de ACM développés dans VEHLIB sont les suivants :
- ACM à courant continu à excitation séparée (fig 3a) - ACM asynchrone (fig 3b) - ACM synchrone à rotor bobiné (fig 3c)
MAS MSY
MCC
a) ACM continu c) ACM synchrone bobinéb) ACM asynchrone
Vp
Vn
VpVp
VnVn
Fig. 3 : Les ACM modélisés actuellement dans VEHLIB
Prochainement, d’autre types d’ACM seront étudiés tels que l’ACM synchrone à aimant permanent et l’ACM à réluctance variable. 2.3. Présentation d’un bloc ACM dans VEHLIB Quelle que soit le type d’ACM et la complexité de sa modélisation, le bloc de base qui lui sera associé sera représenté sous la forme suivante :
Chapitre I :Formalisme de modélisation de l’ensemble convertisseur-machine pour VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
9
cpl dem
Vp
Vn
Cpl_arbre
ACM
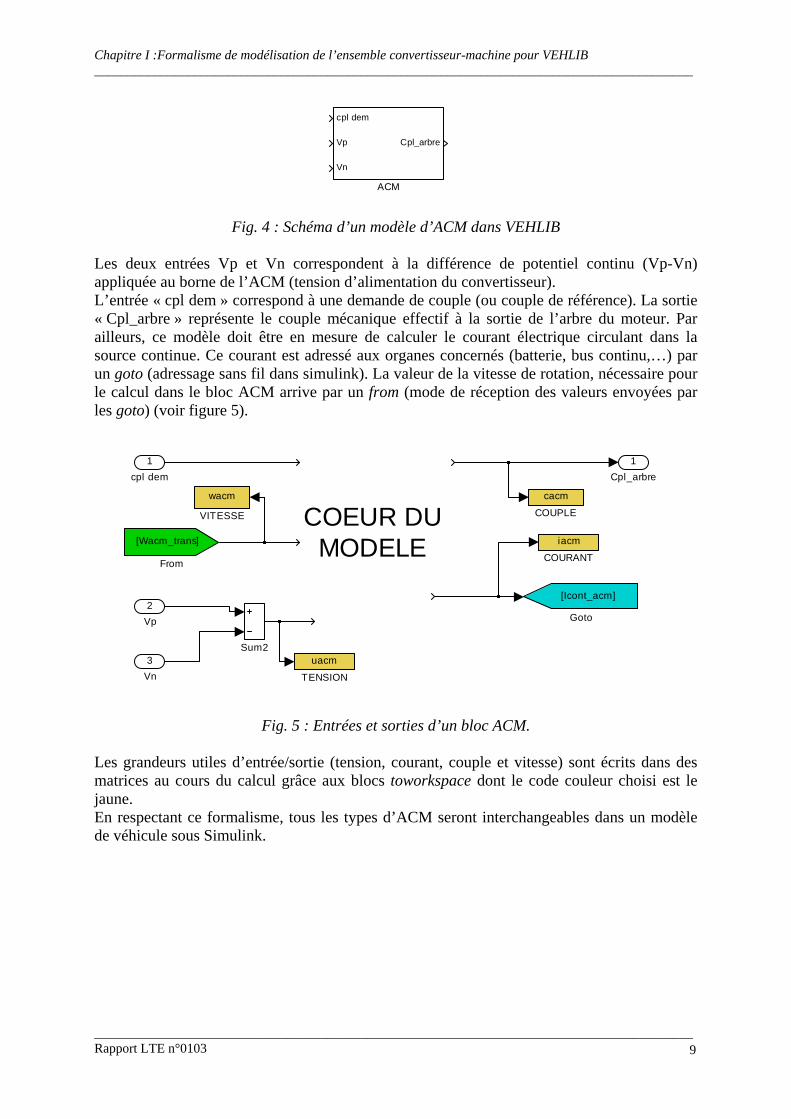
Fig. 4 : Schéma d’un modèle d’ACM dans VEHLIB
Les deux entrées Vp et Vn correspondent à la différence de potentiel continu (Vp-Vn) appliquée au borne de l’ACM (tension d’alimentation du convertisseur). L’entrée « cpl dem » correspond à une demande de couple (ou couple de référence). La sortie « Cpl_arbre » représente le couple mécanique effectif à la sortie de l’arbre du moteur. Par ailleurs, ce modèle doit être en mesure de calculer le courant électrique circulant dans la source continue. Ce courant est adressé aux organes concernés (batterie, bus continu,…) par un goto (adressage sans fil dans simulink). La valeur de la vitesse de rotation, nécessaire pour le calcul dans le bloc ACM arrive par un from (mode de réception des valeurs envoyées par les goto) (voir figure 5).
COEUR DUMODELE
1Cpl_arbre
wacm
VITESSE
uacm
TENSION
Sum2
[Icont_acm]
Goto
[Wacm_trans]
From
iacmCOURANT
cacm
COUPLE
3Vn
2Vp
1cpl dem
Fig. 5 : Entrées et sorties d’un bloc ACM.
Les grandeurs utiles d’entrée/sortie (tension, courant, couple et vitesse) sont écrits dans des matrices au cours du calcul grâce aux blocs toworkspace dont le code couleur choisi est le jaune. En respectant ce formalisme, tous les types d’ACM seront interchangeables dans un modèle de véhicule sous Simulink.

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
10

Chapitre II : Modèle énergétique quasi-statique pour tout type d’ACM __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
11
Chapitre II : Modèle énergétique quasi-statique pour tout type d’ACM
1. Le modèle énergétique statique 1.1. Principe Le modèle énergétique statique d’une ACM permet de reproduire le couple en régime permanent sur l’arbre du moteur et le courant nécessaire coté alimentation continue pour une sollicitation de couple demandé et une tension continue disponible. Ce modèle opérant comme une boîte noire ne se réfère ni aux paramètres électriques du moteur ni aux composants électroniques du convertisseur, mais uniquement au principe de la conservation de l’énergie pendant le transfert (de l’électrique vers la mécanique et vis versa). De ce fait, le modèle énergétique statique est bi-directionnel et est indépendant de la technologie du moteur et du convertisseur. 1.2. Origine du modèle Dans le cas le plus simpliste d’un transformateur idéal d’énergie, et en respectant le formalisme évoqué dans le chapitre précédent, le modèle d’une ACM peut s’exprimer comme suit :
1Cpl_arbre
wacm
VITESSE
uacm
TENSIONSum4
Product1
Product
[Icont_acm]
Goto[Wacm_trans]
From
iacmCOURANT
cacm
COUPLE
3Vn
2Vp
1cpl dem
Fig. 6 : Modèle énergétique statique d’un ACM.
Dans ce cas, la réponse du couple est instantanée et est identique à la demande et le calcul du courant suppose une transformation parfaite de l’énergie (rendement unitaire avec conservation de la puissance) selon l’équation :
contcont U
i ΓΩ= (II.1)

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
12
où : Γ : couple sur l’arbre du moteur Ω : vitesse de rotation du moteur icont : courant côté alimentation continue Ucont : tension d’alimentation continue Il est évident que ce type de modèle est extrêmement rapide en temps de calcul mais ne suffira pas dans l’application à la modélisation des véhicules où toutes les pertes de la chaîne de traction doivent être identifiées d’une manière assez précise. Pour se rapprocher d’un comportement plus réaliste d’une ACM, plusieurs améliorations peuvent être apportées :
- La réponse du couple pourrait être limitée par un gradient dtdC maximum
- Le couple maximum délivrable pourrait être limité par la tension continue disponible
- Un rendement constant ou variable pourrait être introduit
2. Synthèse du modèle amélioré sous Simulink En reprenant le modèle simple du paragraphe précédent, nous allons essayer de l’améliorer pour pouvoir l’utiliser dans les modèles des véhicules. 2.1. La limitation de la réponse du couple : Physiquement, la réponse du couple d’un moteur électrique est lié au temps d’établissement des courants dans la machine. Faisant une première approximation, on peut supposer que le couple sur l’arbre du moteur répond comme un système de premier ordre à la demande de couple selon l’équation exprimée en transformation de Laplace :
refsΓ
+=Γ
Γτ11 (II.2)
ou Γτ est le temps de réponse à 63 %. Cette hypothèse ne devrait pas être irréaliste étant donné les performances des régulateurs aujourd’hui. Sous Simulink, cette réponse du couple peut être exprimée de deux façons :
- Une fonction de transfert exprimant la relation (II.2) - Un limiteur de dérivée : fonction qui existe sous Simulink (appellation rate
limiter), et qui permet de fixer un dtdC maximum.
Bien que la première solution permet de « casser » les boucles algébriques (boucles néfastes dans les modèles Simulink à éviter, notamment dans les régulations), nous avons choisi la deuxième solution pour sa rapidité. 2.2. La limitation du couple maximum : Frontières du domaine utile

Chapitre II : Modèle énergétique quasi-statique pour tout type d’ACM __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
13
Les frontières du domaine utile du moteur électrique et de son convertisseur statique sont fixés physiquement par les limites de courant et de tension. Généralement, l’espace de fonctionnement couple/vitesse d’une ACM peut être représenté comme dans le graphique de la figure 7.
Couple
Vitesse
1
2
Imax1
Imax2
Pmax1Pmax2
Fig. 7 : Les ACM modélisés dans VEHLIB Les frontières à couple constant (zone 1 sur la figure 7) correspondent généralement à un courant maximum toléré, alors que l’hyperbole 2 de la zone de survitesse correspond à une limite de puissance (courant et tension maximum). D’autres zones peuvent exister selon le type de moteur et selon sa « souplesse » (rapport de sa vitesse maximum par sa vitesse nominale). Pour le moteur asynchrone par exemple, on voit souvent apparaître une troisième zone qui correspond uniquement à la contrainte de tension en survitesse, (apparition d’une chute de courant et donc de puissance dans cette zone [trigui 97]). Pour tenir compte de ces contraintes d’une manière simple dans le calcul du couple sur l’arbre du moteur quel que soit le type d’ACM on propose dans le modèle énergétique d’introduire la caractéristique du couple maximum sous forme de matrice en fonction de la vitesse et de la tension continue (Vp-Vn). L’option look up table à deux dimensions disponible dans simulink permet alors de réaliser une interpolation linéaire entre les points de la matrice pour calculer le couple maximum pour un point courant. Un bloc saturation variable a été ensuite développé pour imposer ces limites, calculées à partir de la matrice, au couple demandé (voir modèle complet figure 8). 2.3. La cartographie statique du rendement ou des pertes Les pertes dans les ACM ne sont pas négligeables dans un bilan énergétique d’un véhicule électrique ou hybride. Il faut donc considérer une modélisation de ces pertes de manière à avoir une estimation réaliste du courant consommé par l’ACM. En tenant compte des conventions de signe (icont>0 : fonctionnement moteur, icont<0 fonctionnement générateur) le courant en fonctionnement moteur s’écrit
contmcont U
iη
ΓΩ= (II.3)
et en fonctionnement générateur
Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
14
cont
gcont U
iΓΩ
=η
(II.4)
avec ηm et ηg les rendements respectifs en mode moteur et en mode générateur de l’ACM. Pour s’affranchir de cette distinction, on peut considérer les pertes du moteur de façon à avoir une seule équation algébrique continue du courant pour les deux modes à savoir :
cont
tcont U
Pi
+ΓΩ= (II.5)
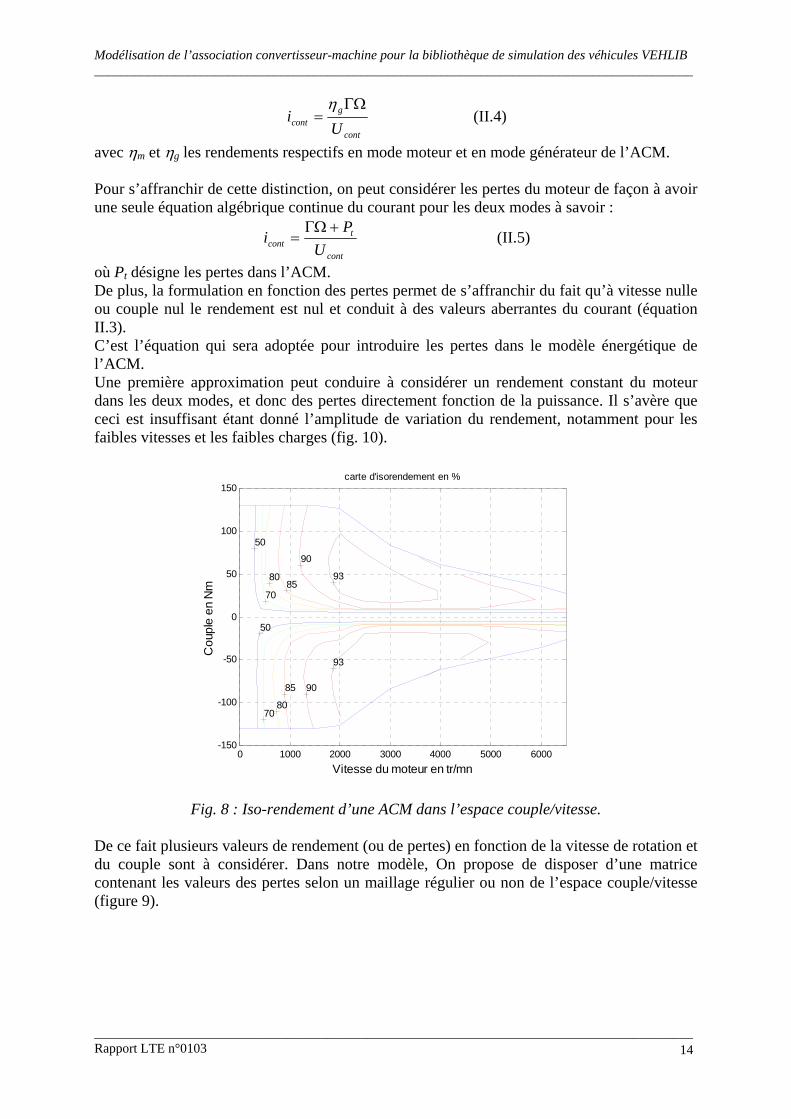
où Pt désigne les pertes dans l’ACM. De plus, la formulation en fonction des pertes permet de s’affranchir du fait qu’à vitesse nulle ou couple nul le rendement est nul et conduit à des valeurs aberrantes du courant (équation II.3). C’est l’équation qui sera adoptée pour introduire les pertes dans le modèle énergétique de l’ACM. Une première approximation peut conduire à considérer un rendement constant du moteur dans les deux modes, et donc des pertes directement fonction de la puissance. Il s’avère que ceci est insuffisant étant donné l’amplitude de variation du rendement, notamment pour les faibles vitesses et les faibles charges (fig. 10).
0 1000 2000 3000 4000 5000 6000-150
-100
-50
0
50
100
150
Vitesse du moteur en tr/mn
Cou
ple
en N
m
carte d'isorendement en %
93
90
8580
70
50
93
9085
8070
50
Fig. 8 : Iso-rendement d’une ACM dans l’espace couple/vitesse. De ce fait plusieurs valeurs de rendement (ou de pertes) en fonction de la vitesse de rotation et du couple sont à considérer. Dans notre modèle, On propose de disposer d’une matrice contenant les valeurs des pertes selon un maillage régulier ou non de l’espace couple/vitesse (figure 9).

Chapitre II : Modèle énergétique quasi-statique pour tout type d’ACM __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
15
Couple
Vitesse
Noeuds du maillage
Point de fonctionnement courant
Frontières du domaine utile
1
2
Fig. 9 : Maillage du plan couple/vitesse et interpolation. Le calcul des pertes pour un point courant (ne se trouvant pas sur un nœud) est réalisé par une fonction de Simulink (look up table) qui permet une interpolation linéaire entre les quatre nœuds adjacents au point calculé. 2.4. Schéma Simulink du modèle
Le schéma Simulink correspondant au modèle énergétique amélioré est représenté sur la figure 10.
VITESSE DE ROTATION 1COUPLE
SUR L'ARBRE
limitgrad cpl
division
wacm
VITESSE
Table des pertes
Table Cmin
Table Cmax
uacmTENSION
Sum2
Sum
SATURVARI
Saturation variable
Product2
Mux
Mux
ACM.Masse_mg
MASSE
ACM.J_mg
INERTIE
M_acm
Goto3
Icont_acm
Goto2
[Wacm_trans]
From3iacm
COURANT
cacmCOUPLE
|u|
Abs
3
TENSION N
2
TENSION P
1
COMMANDE
Fig 10 : Schéma du modèle énergétique quasi-statique élaboré sous Simulink.
Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
16
A noter que nous avons choisi de faire transiter l’inertie du moteur par la sortie couple (sortie de ce fait multiplexée) afin de transmettre cette valeur à l’organe mécanique dans lequel l’équation de la dynamique est résolue (selon l’architecture ça pourrait être la roue du véhicule ou l’embrayage coté primaire ou secondaire). La masse de l’ensemble convertisseur-machine est en revanche transmise par un goto au bloc bilan de masse (voir annexe 1). 2.5. Domaine de validité Ce type de modèle est valable pour le calcul d’un point de fonctionnement statique dans le domaine linéaire du moteur. Pour pouvoir calculer des points de fonctionnement qui évoluent dans le temps (cas d’un véhicule sur un trajet à vitesse variable), il faut admettre les hypothèses suivantes :
- Le temps d’établissement du courant est suffisamment rapide comparé à la dynamique du véhicule.
- Le déplacement dynamique du rendement d’un point de fonctionnement dans l’espace couple vitesse correspond à une succession de rendements statiques.
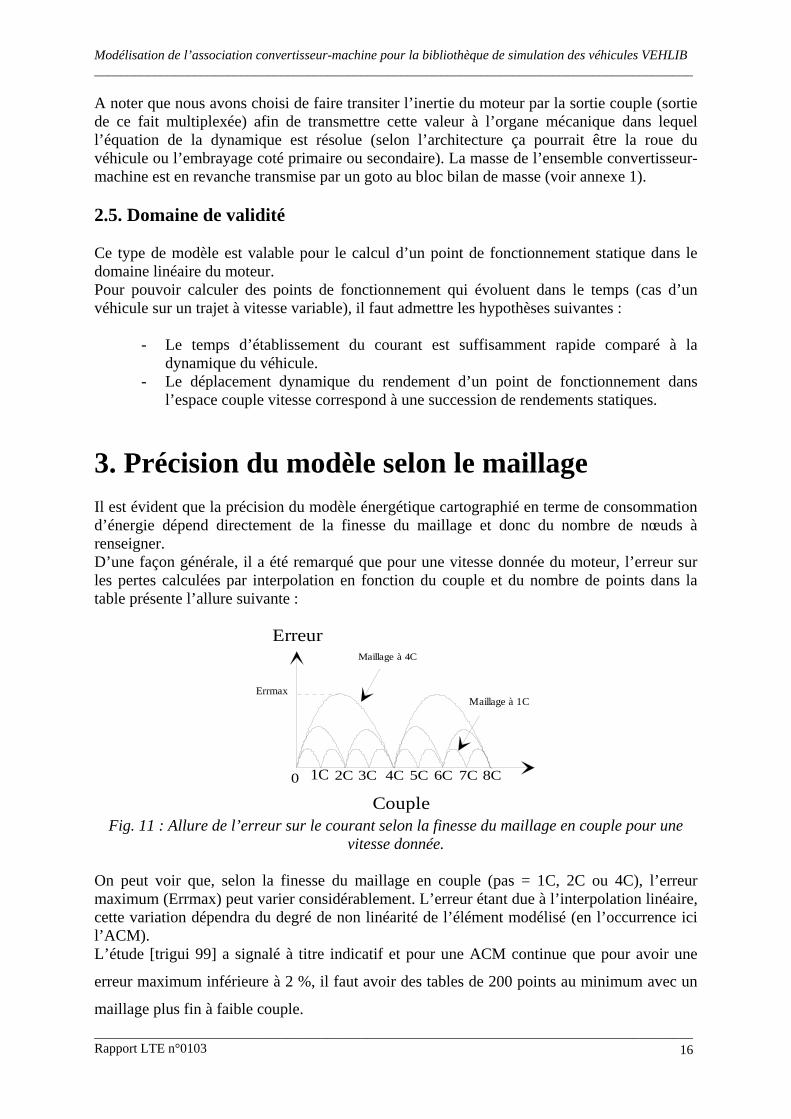
3. Précision du modèle selon le maillage Il est évident que la précision du modèle énergétique cartographié en terme de consommation d’énergie dépend directement de la finesse du maillage et donc du nombre de nœuds à renseigner. D’une façon générale, il a été remarqué que pour une vitesse donnée du moteur, l’erreur sur les pertes calculées par interpolation en fonction du couple et du nombre de points dans la table présente l’allure suivante :
0
Errmax
1C 2C 3C 4C 5C 6C 7C 8C
Couple
ErreurMaillage à 4C
Maillage à 1C
Fig. 11 : Allure de l’erreur sur le courant selon la finesse du maillage en couple pour une
vitesse donnée. On peut voir que, selon la finesse du maillage en couple (pas = 1C, 2C ou 4C), l’erreur maximum (Errmax) peut varier considérablement. L’erreur étant due à l’interpolation linéaire, cette variation dépendra du degré de non linéarité de l’élément modélisé (en l’occurrence ici l’ACM). L’étude [trigui 99] a signalé à titre indicatif et pour une ACM continue que pour avoir une
erreur maximum inférieure à 2 %, il faut avoir des tables de 200 points au minimum avec un
maillage plus fin à faible couple.

Chapitre III : Modèle électrique dynamique __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
17
Chapitre III : Modèle électrique dynamique
1. Principe et utilisation Le modèle électrique dynamique d’une ACM est décrit par les équations électriques en régime dynamique du moteur et du convertisseur. C’est le modèle qui décrit le plus fidèlement les comportements transitoires de l’ensemble. Il est souvent utilisé dans la conception de la commande des moteurs électriques. Dans l’application aux véhicules électriques et hybrides, ce type de modèle est nécessaire pour la simulation des régimes transitoires dans l’association d’un moteur thermique et d’un moteur électrique par exemple. Il permet aussi une simulation des stratégies de commande du moteur électrique lui même. L’étude de ces stratégies présente une importance majeure dans ce domaine car la commande à flux variable introduit un degré de liberté supplémentaire, et permet de réaliser une commande optimisée en énergie. Le choix de simulink pour le développement de nos modèles dynamiques permet de passer aisément à une application temps réel grâce au système Dspace dont dispose le LTE (annexe xx). En effet, après la phase de simulation utilisant ces modèles, les stratégies de commande sont directement implantables dans le processus temps réel en utilisant le compilateur de Dspace qui transforme un fichier simulink en un fichier directement chargeable dans les cartes électroniques de commande.
2. Modèle dynamique de L’ACM continu 2.1. Présentation du modèle sous Simulink Le modèle dynamique de l’ACM continu est constitué d’un bloc moteur, d’un bloc hacheur d’induit, d’un bloc hacheur d’excitation et d’un bloc commande. La figure 12 représente le schéma simulink de ce modèle.

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
18
1Cpl_arbre
MOT CC EXCIT SEP
NIV2
MCC NIV2
Hacheur Induitniv 2
Hacheur Excitniv 2
Cpl_demandv it_rot
Iexcit_mesIind_mes
Ubat_mes
RCYC_ind
RCYC_excit
Commande Flux maximum pour MCC niv2
V1 v itV1'
Cap vitesse
V1
V1
r1
ur
1'
Cap Tens
V1 courV1'
Cap Cour1
V1 courV1'
Cap Cour
3V2
2V1
1Cpl_demandé
Fig. 12 : modèle Simulink de l’ACM continu dynamique Les bloc bleus représentent les capteurs de courant, de tension, de vitesse ou de position. Ces blocs sont créés pour indiquer sur les figures simulink le nombre et le type de capteurs nécessaires à la réalisation de la commande, mais il ne contiennent aucune modélisation de ces capteurs (l’intérieur des blocs est un simple aiguillage des entrées/sorties). 2.2. modèle dynamique du moteur à courant continu Les entrées visibles du modèle du moteur à courant continu à excitation séparée (désigné sur le schéma simulink par MCC NIV2) sont les deux ddp appliquées aux bornes de l’inducteur et de l’induit. La sortie de ce bloc est le couple sur l’arbre du moteur.
Les équations électriques utilisées dans les différents blocs pour décrire le comportement du moteur sont celles de la machine à courant continu à excitation séparée, à savoir :
dtdILRIEU ++= Tension induit (III.1)
Ω= eIME 0 Force électromotrice (III.2)
IIMC eem 0= Couple électromagnétique (III.3)
dtdI
LRIU eeee += Tension inducteur (III.4)
Chapitre III : Modèle électrique dynamique __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
19
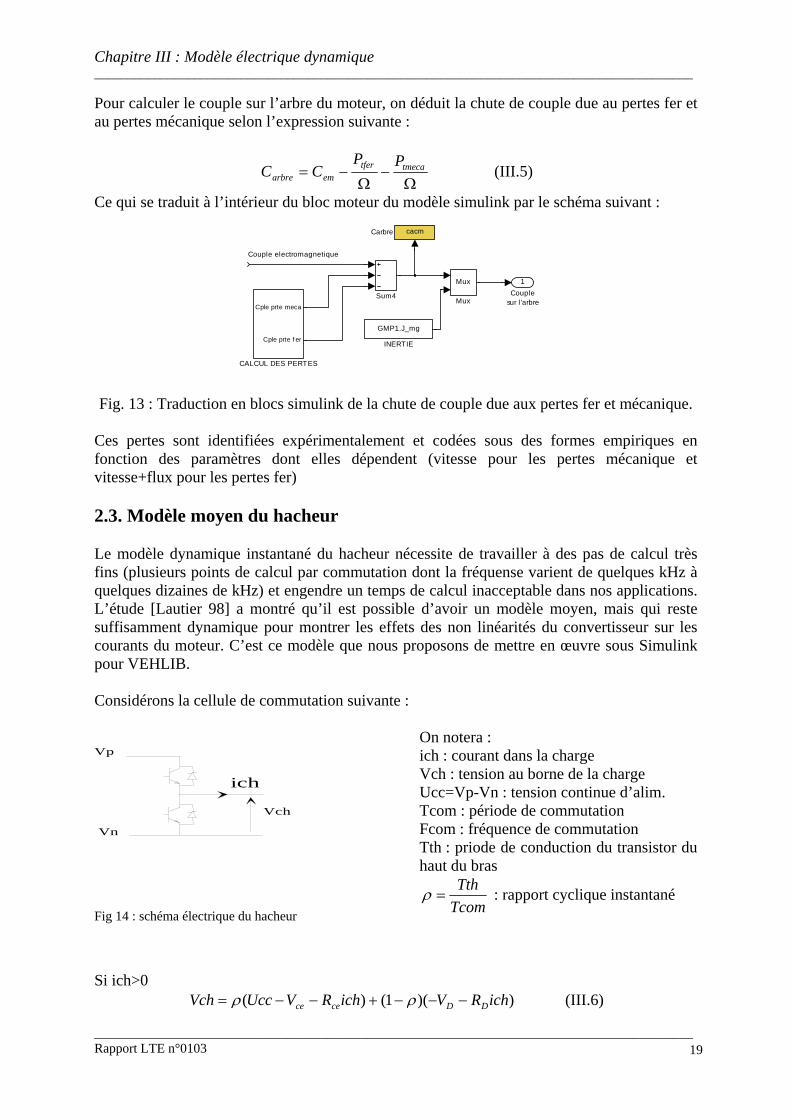
Pour calculer le couple sur l’arbre du moteur, on déduit la chute de couple due au pertes fer et au pertes mécanique selon l’expression suivante :
Ω−
Ω−= tmecatfer
emarbrePP
CC (III.5)
Ce qui se traduit à l’intérieur du bloc moteur du modèle simulink par le schéma suivant :
Couple electromagnetique
1Couple
sur l 'arbreSum4
Mux
Mux
GMP1.J_mg
INERTIE
cacmCarbre
Cple prte meca
Cple prte f er
CALCUL DES PERTES
Fig. 13 : Traduction en blocs simulink de la chute de couple due aux pertes fer et mécanique.
Ces pertes sont identifiées expérimentalement et codées sous des formes empiriques en fonction des paramètres dont elles dépendent (vitesse pour les pertes mécanique et vitesse+flux pour les pertes fer) 2.3. Modèle moyen du hacheur Le modèle dynamique instantané du hacheur nécessite de travailler à des pas de calcul très fins (plusieurs points de calcul par commutation dont la fréquense varient de quelques kHz à quelques dizaines de kHz) et engendre un temps de calcul inacceptable dans nos applications. L’étude [Lautier 98] a montré qu’il est possible d’avoir un modèle moyen, mais qui reste suffisamment dynamique pour montrer les effets des non linéarités du convertisseur sur les courants du moteur. C’est ce modèle que nous proposons de mettre en œuvre sous Simulink pour VEHLIB. Considérons la cellule de commutation suivante : Vp
Vn
ich
Vch
Fig 14 : schéma électrique du hacheur
On notera : ich : courant dans la charge Vch : tension au borne de la charge Ucc=Vp-Vn : tension continue d’alim. Tcom : période de commutation Fcom : fréquence de commutation Tth : priode de conduction du transistor du haut du bras
TcomTth
=ρ : rapport cyclique instantané
Si ich>0 ))(1()( ichRVichRVUccVch DDcece −−−+−−= ρρ (III.6)

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
20
Si ich<0
))(1()( ichRVichRVUccVch ceceDD −−+−−= ρρ (III.7) avec : Vce : Chute de tension dans un transistor passant à courant proche de 0. Rce : Résistance à l'état passant d'un transistor. VD : Chute de tension dans une diode passante à courant proche de 0. RD : Résistance à l'état passant d'une diode. Ainsi, sans modéliser les commutations, on calcule la tension appliquée par le hacheur aux bornes de la charge. Cette tension est instantanée à l’échelle des fréquences fondamentales, mais elle représente une tension moyenne constante à l’échelle d’une commutation. Le modèle simulink correspondant aux équations ci dessus et représenté sur la figure xx a de ce fait pour entrées visibles :
- le rapport cyclique instantané en provenance du bloc commande - la tension continue
Le courant ich dans la charge (ici le MCC) arrive dans le modèle du hacheur par un adressage sans fil (from). La sortie visible de ce modèle est la tension imposée à la charge. Le courant du coté de la source continu est calculé dans le bloc hacheur par l’expression : ichIcont *ρ= Il est envoyé vers la source continue par un goto. 2.4. Modèle de la commande Le modèle dynamique du moteur à courant continu associé à ses hacheurs, décrit précédemment, permet une approche réaliste de la commande. Ainsi, pour réguler le couple fourni sur l’arbre, il suffit de passer par une régulation des courants induit et inducteur. Un régulateur de type PID est calculé pour chacun des deux courants. Ces régulateurs ainsi que les différentes limitations imposées sur le couple ou sur les courants sont codés dans le bloc commande de l’ACM. Le synoptique de la commande est décrit sur la figure 15.
Cref
iexref
StratégiePID MLI
Vexexρ
iex_mes
+-
iindrefPID
Vind
iind_mes
-
+MLI indρ
Vcc_mes
mesΩ
Fig. 15 : Synoptique de la commande du couple du moteur à courant continu.
Chapitre III : Modèle électrique dynamique __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
21
La stratégie de commande permet de définir à partir d’une demande de couple la demande des courants. Plusieurs stratégies sont possibles ; la plus classique étant celle dite à flux maximum. C’est la seule stratégie codée aujourd’hui dans VEHLIB. D’autres telles que les stratégies à flux variable pour un rendement maximum par exemple [trigui 98] seront mis en œuvre dans les versions futures.
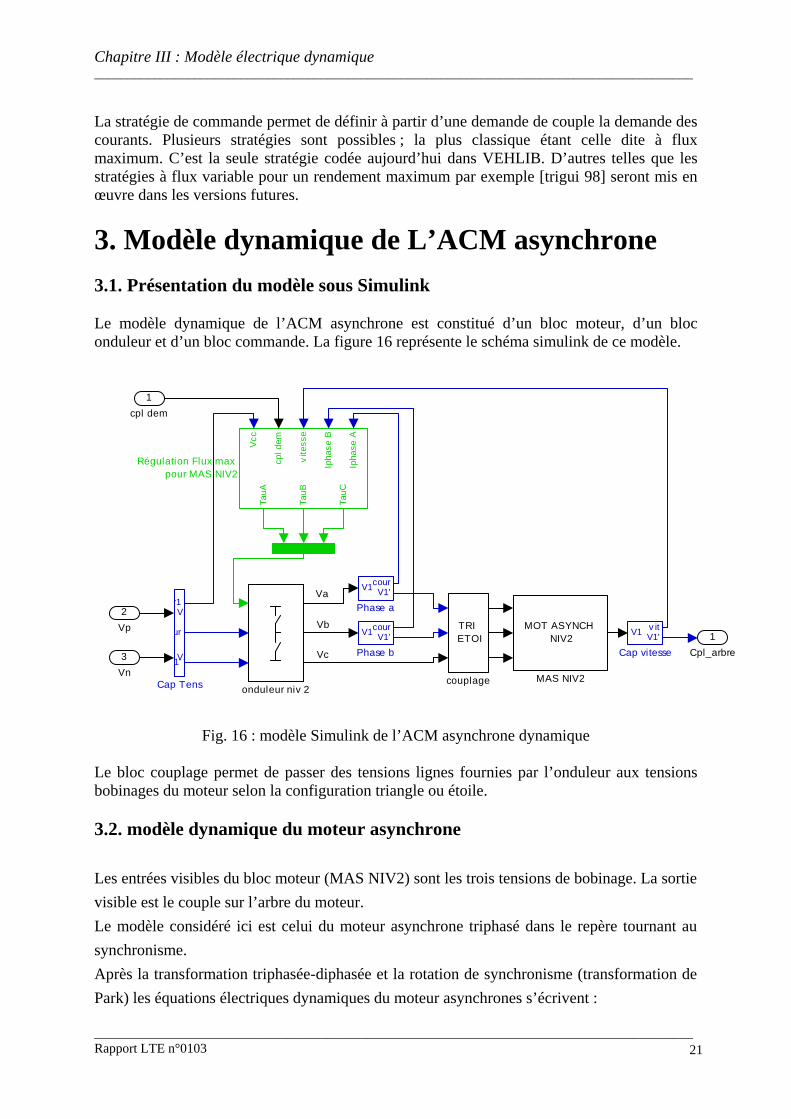
3. Modèle dynamique de L’ACM asynchrone 3.1. Présentation du modèle sous Simulink Le modèle dynamique de l’ACM asynchrone est constitué d’un bloc moteur, d’un bloc onduleur et d’un bloc commande. La figure 16 représente le schéma simulink de ce modèle.
Va
Vb
Vc
1Cpl_arbre
onduleur niv 2
TRI ETOI
couplage
Vcc
cpl d
em
vite
sse
Ipha
se B
Ipha
se A
TauA
TauB
TauC
Régulation Flux max pour MAS NIV2
V1 courV1'
Phase b
V1 courV1'
Phase a
MOT ASYNCH NIV2
MAS NIV2
V1 v itV1'
Cap vitesse
V1
V1
r1
ur
1'
Cap Tens
3Vn
2Vp
1cpl dem
Fig. 16 : modèle Simulink de l’ACM asynchrone dynamique
Le bloc couplage permet de passer des tensions lignes fournies par l’onduleur aux tensions bobinages du moteur selon la configuration triangle ou étoile. 3.2. modèle dynamique du moteur asynchrone Les entrées visibles du bloc moteur (MAS NIV2) sont les trois tensions de bobinage. La sortie visible est le couple sur l’arbre du moteur. Le modèle considéré ici est celui du moteur asynchrone triphasé dans le repère tournant au synchronisme. Après la transformation triphasée-diphasée et la rotation de synchronisme (transformation de Park) les équations électriques dynamiques du moteur asynchrones s’écrivent :

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
22
VSd = RSiSd + dφSd
dt− ωSφSq
VSq = RSiSq +dφSq
dt+ ω SφSd
0 = RRiRd +dφ Rd
dt−ω RφRq
0 = RRiRq +dφ Rq
dt+ ω RφRd
⎧
⎨
⎪ ⎪ ⎪
⎩
⎪ ⎪ ⎪
(III.8)
avec
φ Sd = LSiSd + LmiRd
φ Sq = LSiSq + LmiRq
φRd = LRiRd + LmiSd
φRq = LRiRq + LmiSq
⎧
⎨
⎪ ⎪
⎩
⎪ ⎪
(III.9)
Le couple électromagnétique est donné par l’équation :
)( SdRqSqRdR
m iiLL
pCem ⋅−⋅⋅= φφ (III.10)
Le couple sur l’arbre du moteur est déduit du couple électromagnétique par l’expression (III.5) intégrant les pertes mécaniques et les pertes fer. Les courants dans les bobinages sont calculés à partir des courants id et iq en utilisant la transformation de Park inverse. Ils sont ensuite transmis au bloc couplage par un adressage sans fil. 3.2. modèle moyen de l’onduleur Le modèle moyen de l’onduleur est représenté par l’association de trois bras (ou trois cellules de commutations) dont le modèle moyen a été décrit dans le paragraphe 2.3.
Vp
Vn
Va
VcVb
Fig. 17 : Schéma électrique de l’onduleur modélisé Va, Vb et Vc sont les tensions aux bornes de la charge triphasée. Leurs expressions dans le modèle intègrent les chutes de tension dans les composants selon des équations analogues à (II.6) et (II.7).

Chapitre III : Modèle électrique dynamique __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
23
Le modèle simulink de l’onduleur moyen représenté sur la figure 16 possède comme entrées visibles :
- les trois rapports cycliques instantanés en provenance du bloc commande (multiplexés en une seule entrée à trois fils)
- la tension continue Les courants lignes sont calculés dans le bloc couplage à partir des courants de bobines en provenance du bloc moteur et du type de couplage. Ils arrivent dans le bloc onduleur par un adressage sans fil (goto -> from). Le courant continu absorbé par l’ACM est calculé au niveau du bloc onduleur et est transmit par un adressage sans fil à la source de tension continue. 3.2. modèle de la commande Pour le moteur asynchrone, la commande simulée est une commande vectorielle à flux orienté directe [Mendes 93], [Muata 90]. Ce sont les courants id et iq qui sont régulés pour la commande du couple. L’axe d est identifié de façon à ce que le flux au rotor rapporté au stator ait une composante nulle sur l’axe q. Le synoptique de la commande est décrit sur la figure 18.
Crefidref
iqrefStratégie
PID
PID
Parkinverse MLI
Vd
Vq
Va
Vc
Vbaρ
bρ
cρ
idmesiqmes
-+
+
-θ
estimation du flux
ia_mes
ib_mes
mesΩp1
Vcc_mes
Fig. 18 : Synoptique de la commande du couple du moteur asynchrone. Comme pour le moteur à courant continu, seule la stratégie flux maximum est disponible aujourd’hui dans VEHLIB. D’autres stratégies, sous forme d’autres blocs de commandes, seront rajoutées à la bibliothèque dans les prochaines versions.
Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
24
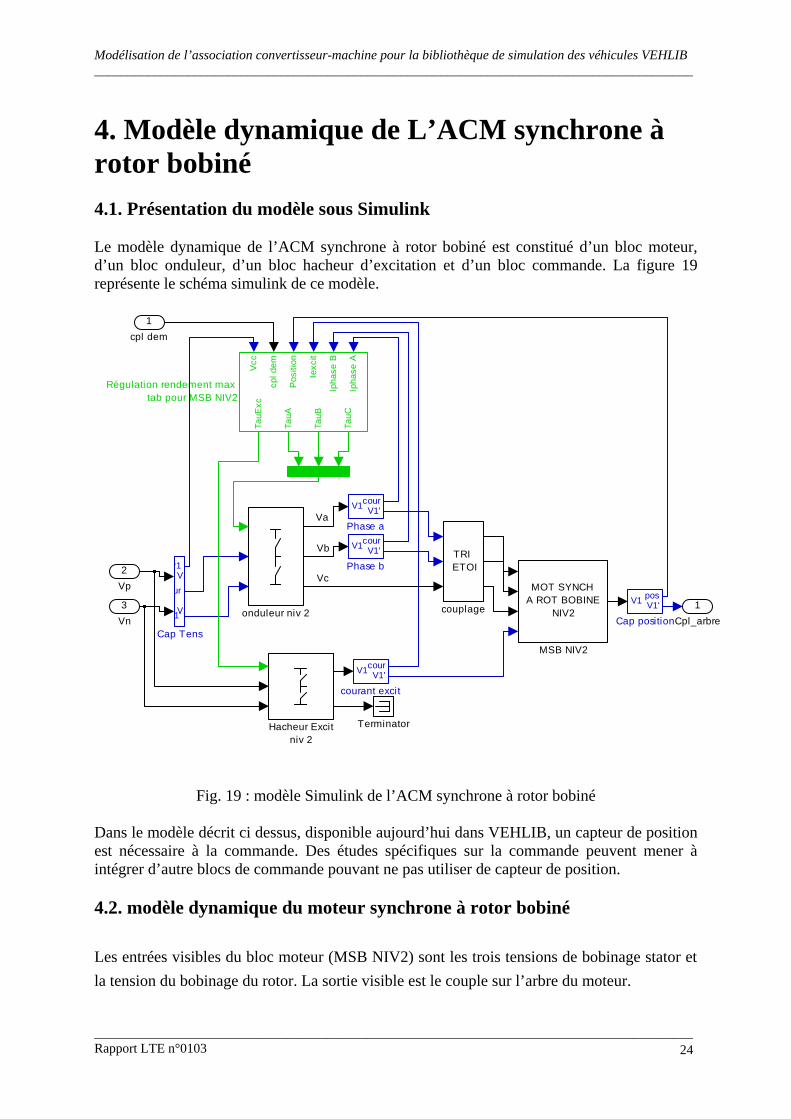
4. Modèle dynamique de L’ACM synchrone à rotor bobiné 4.1. Présentation du modèle sous Simulink Le modèle dynamique de l’ACM synchrone à rotor bobiné est constitué d’un bloc moteur, d’un bloc onduleur, d’un bloc hacheur d’excitation et d’un bloc commande. La figure 19 représente le schéma simulink de ce modèle.
Va
Vb
Vc
1Cpl_arbre
onduleur niv 2
V1 courV1'
courant excit
TRI ETOI
couplage
Terminator
Vcc
cpl d
em
Posi
tion
Iexc
it
Ipha
se B
Ipha
se A
TauE
xc
TauA
TauB
TauC
Régulation rendement max tab pour MSB NIV2
V1 courV1'
Phase b
V1 courV1'
Phase a
MOT SYNCH A ROT BOBINE
NIV2
MSB NIV2
Hacheur Excitniv 2
V1 posV1'
Cap position
V1
V1
r1
ur
1'
Cap Tens
3Vn
2Vp
1cpl dem
Fig. 19 : modèle Simulink de l’ACM synchrone à rotor bobiné
Dans le modèle décrit ci dessus, disponible aujourd’hui dans VEHLIB, un capteur de position est nécessaire à la commande. Des études spécifiques sur la commande peuvent mener à intégrer d’autre blocs de commande pouvant ne pas utiliser de capteur de position. 4.2. modèle dynamique du moteur synchrone à rotor bobiné Les entrées visibles du bloc moteur (MSB NIV2) sont les trois tensions de bobinage stator et la tension du bobinage du rotor. La sortie visible est le couple sur l’arbre du moteur.

Chapitre III : Modèle électrique dynamique __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
25
Les équations utilisées pour la modélisation de la machine synchrone est celles exprimées dans le référentiel de Park à savoir :
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
+⋅=
⋅⋅++⋅=
⋅⋅−+⋅=
dtfdifRfVf
drpdt
qdiqRsVq
qrpdt
ddidRsVd
φ
φωφ
φωφ
(III.11)
avec :
⎪⎩
⎪⎨
⎧
⋅+⋅=⋅=
⋅+⋅=
idMfifLffiqLqq
ifMfidLdd
φφφ
(III.12)
On obtient l’expression du couple suivante :
iqidLqLdifMfpidqiqdpCem ⋅⋅−+⋅⋅=⋅−⋅⋅= ))(()( φφ (III.13)
Comme pour les autres types de moteurs, le couple sur l’arbre est déduit du couple électromagnétique par la soustraction de la chute de couple due aux pertes mécaniques et aux pertes fer. Les courants dans les bobinages du stator sont calculés à partir des courants id et iq en utilisant la transformation de Park inverse. Ils sont ensuite transmis au bloc couplage par un adressage sans fil. 4.3. Modèle moyen de l’onduleur Ce modèle a été décrit dans le paragraphe concernant l’ACM asynchrone. 4.4. modèle de la commande Comme pour les autres types de moteurs, la commande de couple modélisée aujourd’hui dans VEHLIB utilise la régulation des courants. Pour le moteur synchrone bobiné, trois courants sont asservis, à savoir les deux composantes (d,q) du courant stator et le courant d’excitation. Pour choisir la stratégie de commande appropriée à partir de la demande de couple, un degré de liberté supplémentaire est offert par ce type de moteur si l’on admet un fonctionnement à excitation variable.
Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
26
Cref
idref
iqrefStratégie
PID
PID
Parkinverse MLI
Vd
Vq
Va
Vc
Vbaρ
bρ
cρ
idmes
iqmes
-+
+
-
mesθ
Parkia_mes
ib_mes
iexrefPID MLIVex
exρ+-
iex_mes
Vcc_mes
dtd
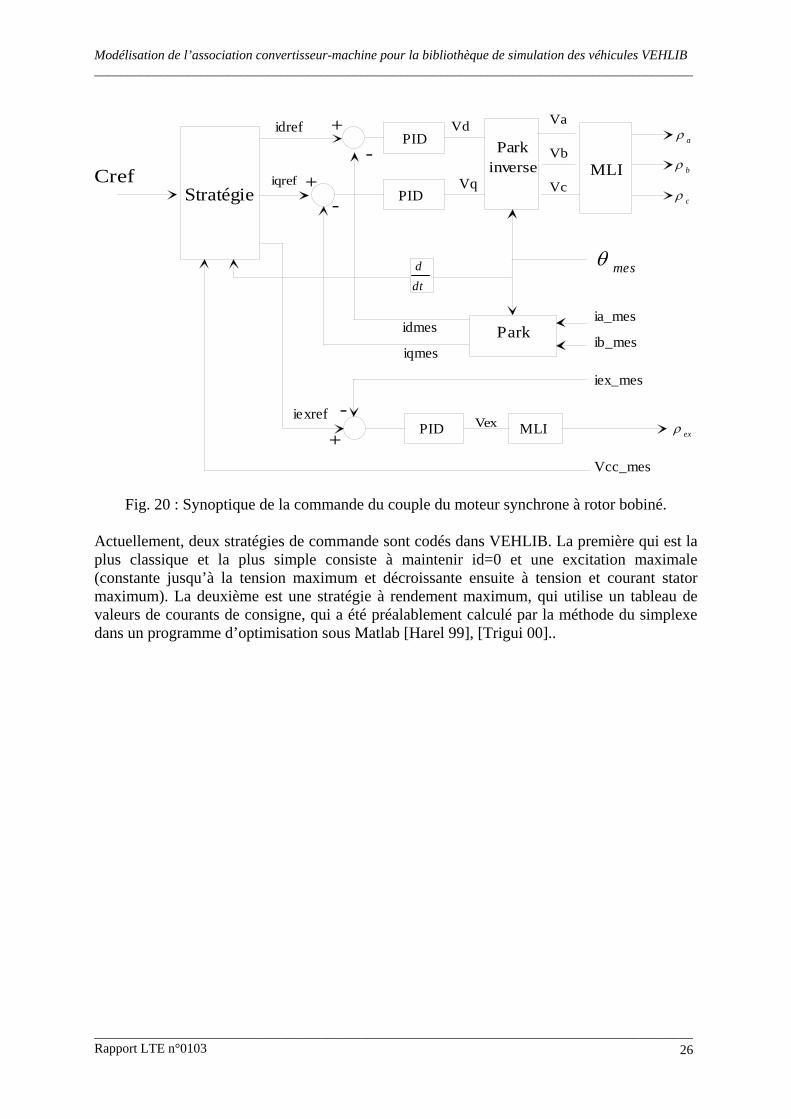
Fig. 20 : Synoptique de la commande du couple du moteur synchrone à rotor bobiné. Actuellement, deux stratégies de commande sont codés dans VEHLIB. La première qui est la plus classique et la plus simple consiste à maintenir id=0 et une excitation maximale (constante jusqu’à la tension maximum et décroissante ensuite à tension et courant stator maximum). La deuxième est une stratégie à rendement maximum, qui utilise un tableau de valeurs de courants de consigne, qui a été préalablement calculé par la méthode du simplexe dans un programme d’optimisation sous Matlab [Harel 99], [Trigui 00]..
Chapitre IV : Modèle électrique quasi-statique __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
27
Chapitre IV : Modèle électrique quasi-statique
1. Principe et utilisation Dans les modèles électriques statiques, le moteur électrique et son convertisseur sont modélisés séparément par des équations mathématiques en régime permanent. Dans le modèle qu’on appellera quasi-statique, on se propose d’introduire une dynamique sur les courants de façon simple. En effet, les courants demandés au moteur seront supposés atteints avec un retard et les tensions sont calculés en conséquence. De ce fait, on élimine les équations différentielles entre les tensions et les courants, ainsi que les boucles de régulation des courants dont on suppose qu’elles répondent à un cahier des charges fixé par l’automaticien. La réponse du courant peut être ainsi modélisée par une fonction de transfert du premier ordre en supposant que le temps de réponse est connu à partir du cahier des charge précité. Sachant que les temps de réponse des courants sont faibles devant la dynamique du véhicule, nous supposons que l’influence d’une erreur sur les temps de réponse engendre une erreur du second ordre sur le bilan énergétique du véhicule, hypothèse à vérifier à posteriori. Ce type de modèle peut être considéré comme un compromis précision/temps de calcul entre le modèle énergétique présenté au chapitre II et le modèle dynamique présenté au chapitre III.
2. Modèle quasi-statique de L’ACM continu 2.1. Présentation du modèle sous Simulink Le modèle quasi-statique de l’ACM continu est constitué d’un bloc moteur, d’un bloc hacheur d’induit, d’un bloc hacheur d’excitation et d’un bloc commande. La figure 21 représente le schéma simulink de ce modèle.

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
28
1Cpl_arbre
hacheur excitniv1
hacheur Induitniv1
Sum3
MOT CC EXCIT SEP
NIV1
MCC NIV1
Cpl_demandIind_dem
I_excit_dem
Commande Flux maximumpour MCC niv 1
3V2
2V1
1Cpl_demandé
Fig. 21 : modèle Simulink de l’ACM continu quasi-statique
2.2. modèle quasi statique du moteur à courant continu Les entrées du bloc MCC NIV1 sont :
1 : le courant induit demandé 2 : le courant d’excitation demandé
La réponse en courant est modélisée à l’intérieur de ce bloc par des fonctions de transfert du premier ordre comme le montre le schéma de la figure 22 :
2Iex1
1Inind1
1
GMP1.trind.s+1
réponse courant induit
1
GMP1.trex.s+1
réponse courant excit
2Iex-dem
1Iind_dem
Fig. 22 : Présentation sous Simulink de la réponse des courants
Avec, GMP1.trind : temps de réponse du courant induit.
GMP1.trex : temps de réponse du courant inducteur Les tensions et le couple électromagnétique sont calculés à l’aide des équations (III.1 à III.4) du chapitre III, qui deviennent en régime permanent :
RIEU += Tension induit
Ω= eIME 0 Force électromotrice

Chapitre IV : Modèle électrique quasi-statique __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
29
IIMC eem 0= Couple électromagnétique
ee RIU = Tension inducteur Pour retrouver le couple sur l’arbre du moteur, on déduit la chute de couple due au pertes fer et au pertes mécanique :
Ω−
Ω−= tmecatfer
emarbrePP
CC
Comme pour les modèles dynamiques, ces pertes sont identifiées expérimentalement et codées sous des formes empiriques en fonction des paramètres dont elles dépendent (vitesse pour les pertes mécanique et vitesse+flux pour les perte fer) 2.3. Modèle quasi-statique du hacheur Le modèle quasi-statique du hacheur est un modèle énergétique se basant sur le transfert de puissance avec calcul des pertes. Les entrées de ce modèle sont le courant demandé et la tension continue (fig 23).
1
Iind_dem
[Uind1_mg1]
tension induit
puiss ind
DIV avec
PROT/ZERO
division avec protecen cas de div/0
Iinduit
Rcy c
Vcc
Pertes
calcul des pertes dans les composants
calc rcyc
rcyc1To Workspace11
icmg1To Workspace10
Sum4
Memory
Rcyc_hind1
Goto3
hind1_hind
Goto2
[Img1_mg1]
From3
2
Tension ccalimentation
1
Iind-dem
Fig 23 : schéma simulink d’un modèle quasi-statique d’un hacheur d’induit
L’équation résumant ce modèle est la suivante :
hachcccc PUIIU += Où Phach désigne les pertes moyennes dans les composants du hacheur (ici on suppose que le hacheur est constitué de deux transistors avec des diodes antiparallèles ou deux IGBT, ce qui constitue un bras ou une cellule de commutation : voir fig 3.a)

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
30
Calcul des pertes moyennes Pour calculer les pertes moyennes dans les composants du hacheur il faut calculer les courants moyens qui les traversent. On suppose que le courant dans la machine est sous la forme présentée sur la figure 24.a et que le courant dans le transistor du haut du bras est de ce fait comme indiqué sur la figure 24.b) : I
tT D
Courant dans la machine
Tcom
Imoy
IT
tT D
Courant dans le transistor du haut (a) (b)
Fig 24 : Allure du courant dans la machine et dans le transistor du haut du bras. Le courant qui traverse la diode du bas du bras est le complémentaire de celui du transistor du haut par rapport au courant dans la machine. Si on appelle Rc le rapport cyclique (temps de conduction de T/Tcom), le courant moyen dans le transistor du haut s’écrit :
RcII moymoyT = et dans la diode du bas :
)1( RcII moymoyD −= Les puissances perdues dans ces composants par conduction et par commutation se calculent comme suit : - Puissance moyenne, perdue pendant l'ouverture d'un transistor :
PouvT = ImoyTUbatEon
Pess
fcom
2
avec Eon : énergie d'ouverture du transistor donnée par le constructeur dans les conditions d'essais. Pess : Puissance correspondante aux conditions d'essais. fcom : Fréquence de commutation. - Puissance moyenne, perdue pendant la fermeture d'un transistor :
PfermT = ImoyTUbat
Eoff
Pess
fcom
2
Eoff : énergie de fermeture du transistor donnée par le constructeur dans les conditions d'essais.

Chapitre IV : Modèle électrique quasi-statique __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
31
- Puissance moyenne, perdue par commutation d'une diode : La principale composante de ces pertes concerne la phase de recouvrement inverse de la diode dont la puissance correspondante pourrait être approchée par :
PcomD = QrrUbatfcom
2
Qrr : Charge de recouvrement inverse d'une diode. - Puissance moyenne perdue par conduction d'un transistor :
moyTmoyTcececondT IIRVP )( += Vce : Chute de tension dans un transistor passant à courant proche de 0. Rce : Résistance à l'état passant d'un transistor. - Puissance moyenne sur une période, perdue par conduction d'une diode :
moyDmoyDDDcondD IIRVP )( += VD : Chute de tension dans une diode passante à courant proche de 0. RD : Résistance à l'état passant d'une diode.
3. Modèle quasi-statique de L’ACM asynchrone 3.1. Présentation du modèle sous Simulink Le modèle quasi-statique de l’ACM asynchrone est constitué d’un bloc moteur, d’un bloc onduleur et d’un bloc commande. La figure 25 représente le schéma simulink de ce modèle.
1Cpl_arbre
onduleur niv 1
Sum3
cpl dem
Vcc
idref
iqref
Régulation flux maximumpour MAS NIV1
MOT ASYNCH NIV1
MAS NIV1
3Vn
2Vp
1cpl dem
Fig. 25 : modèle Simulink de l’ACM asynchrone quasi-statique

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
32
3.2. Bloc moteur : modèle quasi statique du moteur asynchrone Le modèle quasi statique du moteur asynchrone (MAS NIV1) présente comme entrées les deux courants de référence id et iq et comme sortie le couple sur l’arbre du moteur. Le passage des courants demandés aux courants effectifs dans la machine est simulé par une fonction de transfert du 1er ordre dont le temps de réponse est paramétrable. A partir de la réponse des courants, on calcule les tensions et le couple électromagnétique selon les équations suivantes :
⎪⎩
⎪⎨⎧
+=
−=
sqsssqssq
sqsssdssd
iLiRv
iLiRv
ω
ωσ
sqsdsem iiLpC )1( σ−=
Dans ces équation, les paramètres (résistances et inductances) sont variables pour tenir compte de l'échauffement et de l’effet de la saturation magnétique [Trigui 97]. Les graphes de la figure 26 montre un exemple de variation de ces paramètres pour un moteur Leroy Somer de 18,5 kW.
10090807060504030201000,080
0,085
0,090
0,095
0,100
0,105
0,110
0,115
0,120
Température en °C
Rs
en
y = 8,0542e-2 + 3,4407e-4x R^2 = 0,997
Ω
807060504030201000
5
10
15
20
25
Courant magnétisant en A
Ls e
n m
H
(a) (b)
Fig. 26 : a) Variation de la résistance stator en fonction de la température. b) Variation de l’inductance stator avec le courant magnétisant.
De la même manière que pour l’ACM continu, le passage du couple électromagnétique au couple sur l’arbre s’effectue en déduisant les pertes de couple générées par les pertes fer et les pertes mécaniques (eq III.5). 3.1. Modèle quasi-statique de l’onduleur Le modèle quasi-statique de l’onduleur est un modèle énergétique se basant sur le transfert de puissance avec calcul des pertes. Les entrées de ce modèle sont les courants (d,q) demandés et la tension continue (fig 27). Les courants et tensions dans la machine sont ici des entrées du modèle adréssées par des goto.

Chapitre IV : Modèle électrique quasi-statique __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
33
2
Iqref
1
Idref
U2
pertes dans unbras
pWR.Phid5
pWR.Phid4
pWR.Phid3
DIV avec
PROT/ZERO
division avec protecen cas de div/0
f(u)
V efficace max
f(u)
V efficace
vstat1To Workspace13
istat1To Workspace12
rcyc1To Workspace11
icmg1To Workspace10
Sum4
f(u)
Istat efficace1
Rcyc_ond1
Goto3
Icmg1_ond1
Goto2MP1.TR_ET
Gain2
3
Gain1
MP1.TR_ET
Gain
[Isq1_mg1]
From4
[Vsq1_mg1]
From3
[Isd1_mg1]
From2
[Vsd1_mg1]
From1
m
2
Tensioncc
1
idqref
Fig. 27 : modèle Simulink de l’onduleur quasi-statique
Comme pour le modèle du hacheur ( § 2.3), les pertes dans un bras de l’onduleur sont calculées à partir d’un courant moyen sur une période par composant et des caractéristiques du composant de puissance (ici IGBT). En ce qui concerne les pertes par commutations, les mêmes formules sont valables. Pour les pertes par conduction, nous calculerons une moyenne sur une période étant donné que le rapport cyclique n’est plus constant comme dans le cas du moteur à courant continu mais plutôt sinusoïdal. - Puissance moyenne perdue par conduction d'un transistor :
effTcemoyTce
T
TTcececondT IRIVdtIIRVT
P 2
0
)(1+=+= ∫
avec IT : courant instantané dans le transistor
),,( max effMmoyT IfI ϕρ= courant moyen sur une période dans le transistor ),,( max effMeffT IfI ϕρ= courant effiace sur une période dans le transistor
effMI,,max ϕρ sont respectivement le rapport cyclique maximum (crête à crête), le dépahasage tension courant et le courant efficace ligne du moteur.

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
34
- Puissance moyenne sur une période, perdue par conduction d'une diode : La même démarche est appliqué à la diode :
effDcemoyDce
T
DDDDcondT IRIVdtIIRVT
P 2
0
)(1+=+= ∫
Après le calcul de la puissance perdue dans un bras, celle ci est multipliée par trois pour avoir la puissance totale perdue dans l’onduleur en supposant un comportement symétrique des trois bras.
4. Modèle quasi-statique de L’ACM synchrone 4.1. Présentation du modèle sous Simulink Le modèle quasi-statique de l’ACM asynchrone est constitué d’un bloc moteur, d’un bloc onduleur, d’un bloc hacheur d’excitation et d’un bloc commande. La figure 28 représente le schéma simulink de ce modèle.
1Cpl_arbre
onduleur niv 1
hacheur excitniv1
Sum3
cpl dem
Vcc
idref
iqref
iexref
Régulation rendement max tabpour MSB NIV1
MOT SYNCH A ROT BOBINE
NIV1
MSB NIV1
3Vn
2Vp
1cpl dem
Fig. 28 : modèle Simulink de l’ACM synchrone quasi-statique 4.2. Modèle quasi-statique du moteur Le modèle quasi statique du moteur synchrone bobiné est construit de la même manière que celui du moteur asynchrone. Une troisième entrée représente la demande du courant d’excitation. Après la simulation des réponses des trois courants (d,q et excitation), les tensions et le couple sont calculé par les équations en régime permanent déduite des équations III.11 à III.13 du chapitre précédent :

Chapitre IV : Modèle électrique quasi-statique __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
35
⎪⎩
⎪⎨
⎧
⋅=
⋅+⋅⋅+⋅=
⋅⋅−⋅=
fff
ffddqq
qqdd
iRV
irMpiLrpiRsV
iLrpiRsV
ωω
ω
qdffem iiLqLdiMpC ⋅⋅−+⋅⋅= ))((
Dans ce modèle les résistance sont fonction de la température et le phénomène de la saturation magnétique est pris en compte sous forme de variation des inductance en fonction du courant comme l’illustre le graphe de la figure 29.
00,20,40,60,8
11,2
0 0,2 0,4 0,6 0,8 1
courant d'excitation If pu
Mf p
u
Fig. 29 : Variation de l’inductance mutuelle en fonction du courant d’excitation.
Le passage au couple sur l’arbre se fait à l’aide de l’équation III.5. 4.3. Modèle de l’onduleur Ce modèle est le même que celui exposé en 3.3 4.4. Modèle du hacheur d’excitation Ce modèle est le même que celui exposé en 2.3

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
36

Chapitre V : Comparaison et validité des différents types de modèles __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
37
Chapitre V : Comparaison et validité des différents types de modèles.
1. Comparaison des modèles électriques dynamique et quasi-statique : cas du moteur asynchrone 1.1. Objectifs, hypothèses et données de l’étude comparative L’objectif de notre étude est de quantifier les performances de chaque modèle et de valider son domaine d’application. Dans ce premier type de comparaison, nous confrontons le modèle électrique quasi-statique au modèle électrique dynamique. Ce dernier étant le plus fidèle des trois types de modèles, il s’avère néanmoins très pénalisant en terme de temps de calcul. Nous proposons de mener la comparaison sur les modèles du moteur asynchrone, étant donnée la complexité de sa modélisation (moteur + commande). Des études similaires sur les autres types de moteur conduiraient à des conclusions analogues. Bien que le modèle quasi-statique soit apte aujourd’hui à accueillir des données de moteur avec des paramètres variables, on se limitera dans les comparaisons qui suivent à la zone linéaire du moteur afin d’éliminer les disparités dues aux non-linéarités. Une étude spécifique sur l’introduction de la saturation magnétique par exemple pourra être menée en confrontant les deux modèles aux résultats d'essais sur banc. Les hypothèses de calcul seront donc les suivantes :
- utilisation du même bloc de stratégie de commande avec le même fichier associé de manière à ce que pour une demande de couple donnée nous avons les mêmes courants de référence dans les deux types de modèles,
- utilisation des mêmes paramètres fixes du moteur et de l’onduleur, - utilisation des mêmes formulations des pertes mécaniques et des pertes fer, - dans les deux modèles, la boucle de flux est ouverte, le temps de réponse du flux
rotorique est fixé par les paramètres de la machine et non asservi, - dans les deux modèles, la boucle de couple est ouverte et le couple demandé
correspond à un couple électromagnétique. Le couple mécanique sur l’arbre est de ce fait plus faible que le couple demandé.

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
38
1.2. Comparaison dynamique Rappelons tout d’abord le fonctionnement des deux modèles. Dans le modèle dynamique, une régulation des courants, par l’intermédiaire des tensions demandées à l’onduleur permet d’établir le couple demandé suite à l’établissement du flux rotorique. Une commande vectorielle à flux rotorique orienté est donc élaborée pour le modèle. Dans le modèle quasi-statique, on suppose que les courants et le flux rotorique répondent à la demande par des fonctions de transferts simples, la commande vectorielle est supposée dans ce cas bien acquise. Pour ce modèle, la réponse du flux rotorique est fixée par la constante de temps rotorique Tr qui est intrinsèque à la machine. En revanche, la réponse des courants reste à définir par le cahier des charges. Dans l’application à la simulation des véhicules, une fréquence d’échantillonnage de 10 Hz est suffisante pour établir un bilan énergétique précis [Trigui 99]. De plus, la réponse en couple d’un véhicule à essence est estimé à 0.3 s environ et 0.5 s environ pour un véhicule diesel. Sachant que l’un des objectifs de la bibliothèque VEHLIB est de fonctionner en pas de simulation variable, ce pas est choisi par le solveur de simulink selon la dynamique de l’instant courant. Celle ci dépend directement des temps de réponse des grandeurs. Pour cela nous avons supposé qu’une réponse des courants en 50 ms est suffisante pour un bon compromis entre la réponse du couple et le temps de simulation. Les résultats suivants, représentés sur la figure 30 et correspondant à un échelon de couple de 50Nm, corroborent cette hypothèse :
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
5
10
15
20
25
30
35
40
45
50
temps en s
cour
ants
d e
t q e
n A
isd modèle quasi statiqueisd modèle dynamiqueisq modèle quasi statiqueisq modèle dynamique
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
temps en s
phird
en
Wb
Modèle quasi-statique
Modèle dynamique
Réponse des courants des deux modèles Réponse des flux au rotor des deux modèles
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-50
0
50
100
150
200
250
300
350
400
tens
ions
sta
tor d
et q
en
V
temps en s
vsd modèle quasi statiquevsd modèle dynamiquevsq modèle quasi statiquevsq modèle dynamique
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-10
0
10
20
30
40
50
temps en s
répo
nse
des
coup
les
sur l
'arb
re e
n N
m
modèle quasi statique
modèle dynamique
Comparaison des tension d,q Réponse des couple mécanique sur l’arbre
Fig. 30 : Réponse dynamique des grandeurs pour un échelon de couple de 50 Nm.

Chapitre V : Comparaison et validité des différents types de modèles __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
39
En effet, bien que les courants du modèle quasi statique soient en retard par rapport à ceux du modèle dynamique, la réponse du couple sur l’arbre est très proche car la réponse du flux est prépondérante dans ce cas (réponse beaucoup plus lente). Une amélioration dans la modélisation pourrait être apportée dans les prochaines version par l’introduction d’une boucle de régulation sur le flux). En revanche, le retard des courants dans le modèle quasi-statique conduirait à une sous estimation de la puissance électrique, bien que celle ci soit faible dans les premières dizaines de ms (voir graphe des tensions). Un calcul de l’énergie électrique fournie pendant l’échelon de couple de 2s ainsi que la répartition des différentes pertes conduit au tableau comparatif suivant : Pertes
méca (Wh)
Pertes fer (Wh)
Pertes Joule stator (Wh)
Pertes Joule rotor (Wh)
Pertes Onduleur (Wh)
Energie meca arbre Mot (Wh)
Energ. Tot source cont. (Wh)
Temps de calcul et de traitement
Modèle dynami.
0.022 0.287 0.169 0.066 0.229 2.499 3.272 17 mn
Modèle quasi-sta
0.022 0.283 0.167 0.041 0.23 2.547 3.283 0.85 s
Tableau 1 : Pertes séparées et énergies consommées au cours d’un échelon de couple de 50
Nm pendant 2 secondes Mises à part les pertes Joule au rotor, nous constatons peu d’écart sur les pertes entre les deux modèles dans ce cas de fonctionnement. Deux phénomènes sont à l’origine des écarts observés. Le premier est du aux différences de réponses transitoires observées entre les deux modèles. Le deuxième provient du pas de calcul variable qui est fixé par le solveur de simulink. C’est ce pas de calcul, lié à la dynamique du système, qui justifie l’écart substantiel entre les deux temps de calcul des deux modèles (moins d’une seconde contre 17 mn). Il faut signaler que dans ce cas de simulation, le temps d’échantillonnage des variables écrites dans les matrices est égal au pas de calcul. Dans l’application à la simulation des véhicules, il serait intéressant d’estimer l’influence de ces écarts sur la consommation d’énergie pendant un trajet type du véhicule. Ceci nous renseignerait sur l’influence des transitoires rapides de la machine électrique pendant un cycle ainsi que sur la validité de l’utilisation du modèle quasi-statique qui présente un gain de temps très conséquent. 1.3. Simulation d’un véhicule sur un cycle J227 Pour évaluer les écarts sur la consommation d’énergie entre le modèle dynamique et le modèle quasi-statique de l’ACM, nous avons créé à partir de la bibliothèque VEHLIB deux modèles de véhicule électrique. Ces deux modèles sont identiques sauf pour l’organe électrique de traction qui correspond dans un cas au modèle de l’ACM dynamique et dans l’autre au modèle quasi-statique. Des simulations du fonctionnement des deux véhicules ont été réalisées en utilisant un profil de vitesse demandé correspondant au cycle normalisé J227AC. Des résultats instantanés, échantillonnés à 10 Hz (fréquence estimée suffisante pour la simulation énergétique d’un véhicule sur cycle) sont présentés sur la figure 31 et illustrent le comportement des deux modèles.

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
40
0 10 20 30 40 50 60 70 80-10
0
10
20
30
40
50
temps en s
Vite
sse
en k
m/h
0 10 20 30 40 50 60 70 80-60
-40
-20
0
20
40
60
temps en s
coup
le m
écan
ique
en
Nm
modèle quasi statique
modèle dynamique
Vitesse du cycle Couple sur l’arbre du moteur
0 10 20 30 40 50 60 70 80-100
-50
0
50
100
150
temps en s
cour
ants
d e
t q e
n A
isd modèle quasi statiqueisd modèle dynamiqueisq modèle quasi statiqueisq modèle dynamique
0 10 20 30 40 50 60 70 80-150
-100
-50
0
50
100
150
200
250
temps en s
tens
ion
stat
or d
et q
en
V
vsd modèle quasi statiquevsd modèle dynamiquevsq modèle quasi statiquevsq modèle dynamique
Courant d et q dans le stator la machine Tension d et q au stator de la machine
Fig. 31 : Comparaison de l’évolution de quelques grandeurs pendant un cycle J227 utilisant les deux types de modèles
Le traitement des résultats instantanés permet de dresser le tableau suivant : Pertes
méca (Wh)
Pertes fer (Wh)
Pertes JoulStator (Wh)
Pertes JoulRotor (Wh)
Pertes Onduleur(Wh)
Energie meca arbre Mot (Wh)
Energ. Tot source cont. (Wh)
mode T* R* T R T R T R T R T R T R
Temps De calcul
Modèle dynami.
2.1 0.2 7.8 1.5 2.9 0.9 2.1 0.6 4.0 1.2 57.8 -19.8 76.7 -15.4 1h30 mn
Modèle quasi-sta
2.1 0.2 7.8 1.5 3.0 0.9 2.2 0.6 4.0 1.2 57.8 -19.8 76.8 -15.4 10 s
* T : mode traction, R : mode régénération pendant la décélération, par convention, l’énergie a un signe négatif pendant cette phase
Tableau 2 : Pertes séparées et énergies consommées au cours d’un cycle J227AC Nous constatons que les écarts entre les deux modèles sont insignifiants, tant en mode moteur qu’en mode générateur. En revanche, la comparaison des temps de calcul permet de conclure que le modèle quasi-statique est de loin le plus adapté à la simulation du véhicule entier sur cycle, d’autant plus qu’il existe des cycles normalisés et d’usage réel ayants une durée de plusieurs centaines de
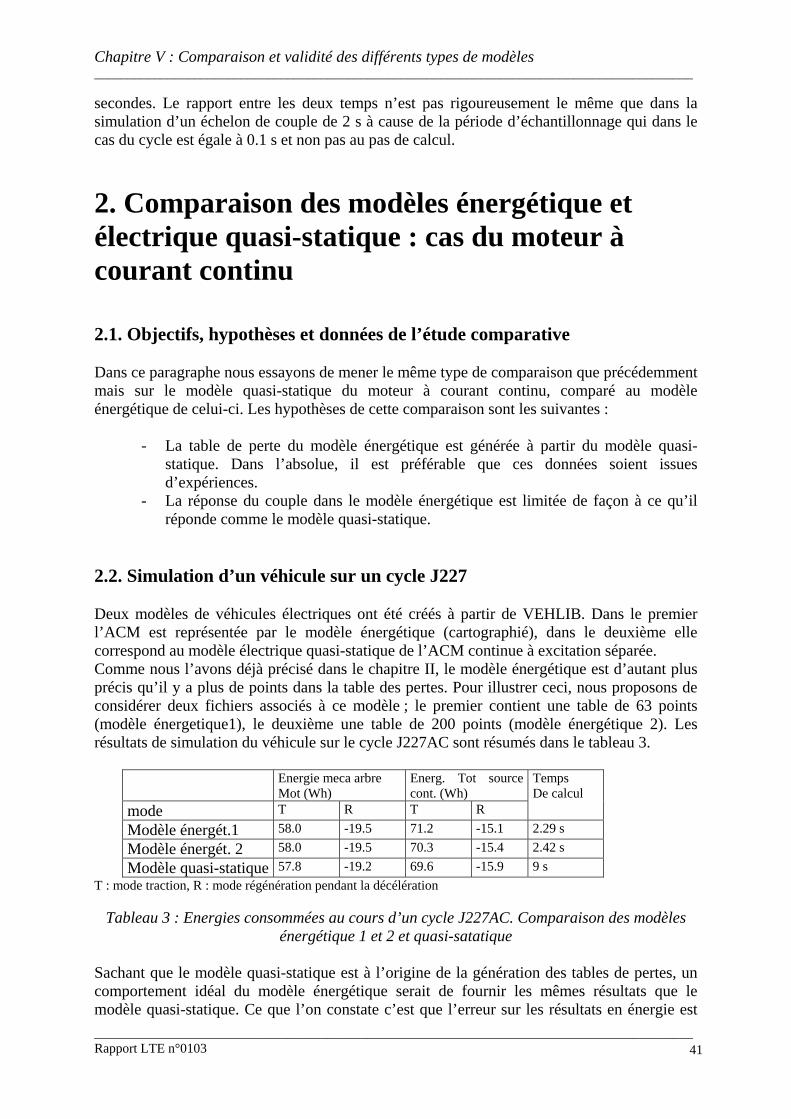
Chapitre V : Comparaison et validité des différents types de modèles __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
41
secondes. Le rapport entre les deux temps n’est pas rigoureusement le même que dans la simulation d’un échelon de couple de 2 s à cause de la période d’échantillonnage qui dans le cas du cycle est égale à 0.1 s et non pas au pas de calcul.
2. Comparaison des modèles énergétique et électrique quasi-statique : cas du moteur à courant continu 2.1. Objectifs, hypothèses et données de l’étude comparative Dans ce paragraphe nous essayons de mener le même type de comparaison que précédemment mais sur le modèle quasi-statique du moteur à courant continu, comparé au modèle énergétique de celui-ci. Les hypothèses de cette comparaison sont les suivantes :
- La table de perte du modèle énergétique est générée à partir du modèle quasi-statique. Dans l’absolue, il est préférable que ces données soient issues d’expériences.
- La réponse du couple dans le modèle énergétique est limitée de façon à ce qu’il réponde comme le modèle quasi-statique.
2.2. Simulation d’un véhicule sur un cycle J227 Deux modèles de véhicules électriques ont été créés à partir de VEHLIB. Dans le premier l’ACM est représentée par le modèle énergétique (cartographié), dans le deuxième elle correspond au modèle électrique quasi-statique de l’ACM continue à excitation séparée. Comme nous l’avons déjà précisé dans le chapitre II, le modèle énergétique est d’autant plus précis qu’il y a plus de points dans la table des pertes. Pour illustrer ceci, nous proposons de considérer deux fichiers associés à ce modèle ; le premier contient une table de 63 points (modèle énergetique1), le deuxième une table de 200 points (modèle énergétique 2). Les résultats de simulation du véhicule sur le cycle J227AC sont résumés dans le tableau 3.
Energie meca arbre Mot (Wh)
Energ. Tot source cont. (Wh)
mode T R T R
Temps De calcul
Modèle énergét.1 58.0 -19.5 71.2 -15.1 2.29 s Modèle énergét. 2 58.0 -19.5 70.3 -15.4 2.42 s Modèle quasi-statique 57.8 -19.2 69.6 -15.9 9 s
T : mode traction, R : mode régénération pendant la décélération
Tableau 3 : Energies consommées au cours d’un cycle J227AC. Comparaison des modèles énergétique 1 et 2 et quasi-satatique
Sachant que le modèle quasi-statique est à l’origine de la génération des tables de pertes, un comportement idéal du modèle énergétique serait de fournir les mêmes résultats que le modèle quasi-statique. Ce que l’on constate c’est que l’erreur sur les résultats en énergie est

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
42
inférieure à 1% pour le modèle à 200 points alors qu’elle dépasse les 2% pour le modèle à 63 points. Le temps de calcul en revanche est à l’avantage du modèle énergétique 1 bien que la différence est minime avec le temps de calcul du modèle énergétique 2. Pour les deux modèles, ce temps reste très inférieur au temps de calcul du modèle électrique quasi-statique ( moins du tiers).
3. Récapitulatif : Avantages et inconvénients de chaque modèle Nous avons listé sur le tableau 4 quelques avantages et inconvénients des trois types de modèles, vus notamment du coté du domaine de la simulation des véhicules.
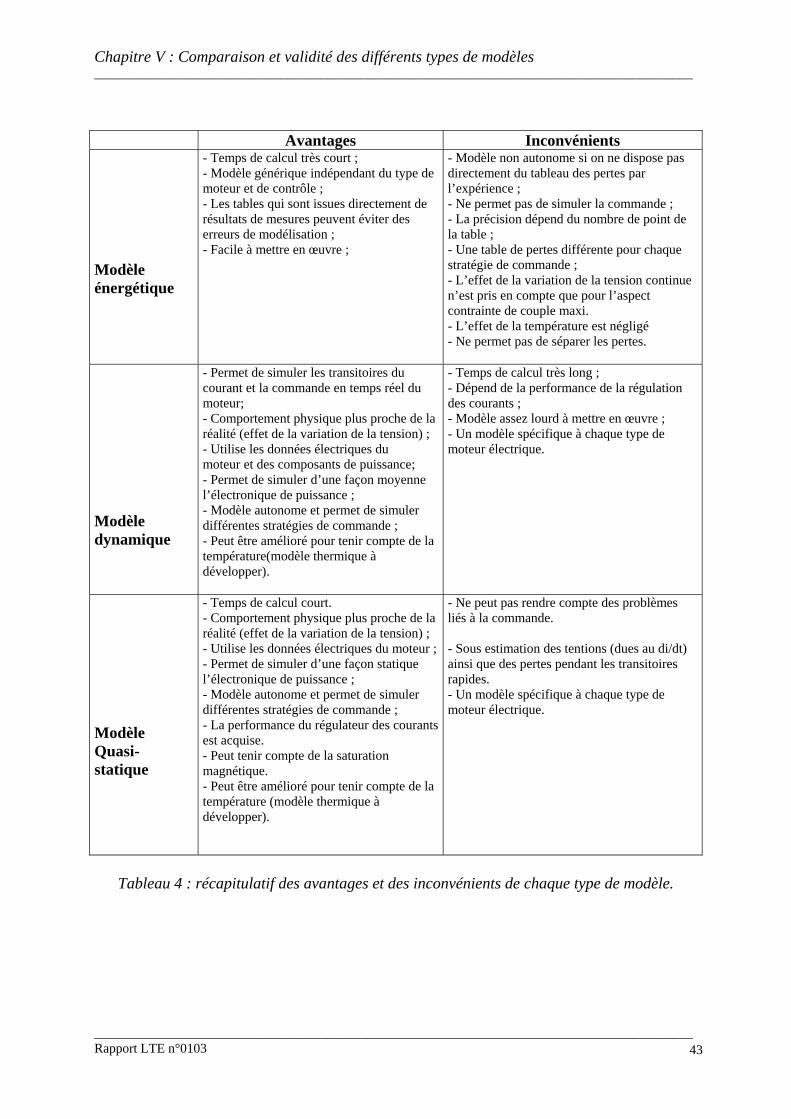
Chapitre V : Comparaison et validité des différents types de modèles __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
43
Avantages Inconvénients Modèle énergétique
- Temps de calcul très court ; - Modèle générique indépendant du type de moteur et de contrôle ; - Les tables qui sont issues directement de résultats de mesures peuvent éviter des erreurs de modélisation ; - Facile à mettre en œuvre ;
- Modèle non autonome si on ne dispose pas directement du tableau des pertes par l’expérience ; - Ne permet pas de simuler la commande ; - La précision dépend du nombre de point de la table ; - Une table de pertes différente pour chaque stratégie de commande ; - L’effet de la variation de la tension continue n’est pris en compte que pour l’aspect contrainte de couple maxi. - L’effet de la température est négligé - Ne permet pas de séparer les pertes.
Modèle dynamique
- Permet de simuler les transitoires du courant et la commande en temps réel du moteur; - Comportement physique plus proche de la réalité (effet de la variation de la tension) ; - Utilise les données électriques du moteur et des composants de puissance; - Permet de simuler d’une façon moyenne l’électronique de puissance ; - Modèle autonome et permet de simuler différentes stratégies de commande ; - Peut être amélioré pour tenir compte de la température(modèle thermique à développer).
- Temps de calcul très long ; - Dépend de la performance de la régulation des courants ; - Modèle assez lourd à mettre en œuvre ; - Un modèle spécifique à chaque type de moteur électrique.
Modèle Quasi-statique
- Temps de calcul court. - Comportement physique plus proche de la réalité (effet de la variation de la tension) ; - Utilise les données électriques du moteur ; - Permet de simuler d’une façon statique l’électronique de puissance ; - Modèle autonome et permet de simuler différentes stratégies de commande ; - La performance du régulateur des courants est acquise. - Peut tenir compte de la saturation magnétique. - Peut être amélioré pour tenir compte de la température (modèle thermique à développer).
- Ne peut pas rendre compte des problèmes liés à la commande. - Sous estimation des tentions (dues au di/dt) ainsi que des pertes pendant les transitoires rapides. - Un modèle spécifique à chaque type de moteur électrique.
Tableau 4 : récapitulatif des avantages et des inconvénients de chaque type de modèle.

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
44

Conclusion __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
45
Conclusion La bibliothèque VEHLIB en développement au LTE est essentiellement destinée à l’élaboration de logiciels de simulation de tout type de véhicules routiers. S’appuyant sur une approche système, chaque organe du véhicule est représenté par un modèle plus ou moins fin selon l’application considérée. C’est dans ce cadre que ce travail concernant les machines électriques associées à leurs convertisseurs statique a été mené. Ainsi, trois niveaux de modélisation de l’association convertisseur machine sont disponibles aujourd’hui dans VEHLIB : Le premier, basé sur un principe énergétique, permet un temps de calcul très court grâce à des interpolations linéaires effectuées sur des données rentrées sous formes de tables. Ce type de modèle est indépendant de la technologie du moteur et du convertisseur. En revanche plusieurs phénomènes, tels que la température et la variation de la tension d’alimentation, ne sont pas pris en compte. D’autre part, l’obtention d’une bonne précision sur l’énergie électrique consommée dans ce type de modèle est synonyme d’une table de données avec un nombre important de points à renseigner. Le deuxième, le plus utilisé dans le domaine de la conception des commandes, est un modèle dynamique utilisant les équations électriques du moteur et de son convertisseur. Trois types de moteurs, à courant continu, synchrone à rotor bobiné et asynchrone, ont été modélisés, d’autres le seront dans l’avenir. Bien que le plus fidèle en terme de comportement transitoires, ce type de modèle présente un temps de calcul très conséquent à l’échelle des simulations des véhicules sur cycle, qui représente l’objectif premier de nos travaux à l’INRETS. D’autre part, le phénomène de la saturation magnétique, à l’origine d’une surconsommation d’énergie, est difficile à prendre en compte dans ce type de modèle. Le troisième, qui présente une sorte de compromis entre les deux premiers, est le modèle appelé ici quasi-statique. S’appuyant sur les équations électriques en régime établi, il introduit une dynamique sur les courants moyennant certaines hypothèses. Ce modèle présente de bonnes performances tant sur le plan de la précision du bilan énergétique qu’au niveau du temps de calcul. Il peut être utilisé dans les simulations des véhicules avec un bon compromis entre l’erreur sur les transitoires et la prise en compte de différents phénomènes (température, saturation, variation de la tension continue…). La souplesse de la bibliothèque VEHLIB nous permettra de choisir, pour chacune des applications futures, le type de modélisation le plus approprié suivant les objectifs recherchés et les données disponibles.

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
46

Références bibliographiques __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
47
Références Bibliographiques [Caron 96] J. P. Caron, J. P. Hautier Modélisation et commande de la machine asynchrone Collection méthodes et pratiques de l’ingénieur Editions Technip [Combes 98] E. Combes, M. Delhom, J. Personnaz
Parallel Hybrid Traction System and Mechatronic Design. FISITA Congres proceeding. Paris, september 1998.
[Harel 99] F. Harel, R. Trigui, L. Azouzi, B. Jeanneret, F. Badin Two dimentional working optimisation of a wound-rotor-synchronous motor for EV
drive train Electromotion99 conference. Jully 1999, Patras Greece. [Heath 95] R. P. G. Heath, C. Y. Mo
Hyzemlib Workshop I Viewfoils. Rapport du 31/01/95.
[Jeanneret 01] B. Jeanneret, R. Trigui. Présentation de la bibliothèque de simulation de véhicules. VEHLIB Version 1.0. Rapport INRETS-LTE N° 0102. Janvier 2001. [Lautier 98] P. Lautier Modélisation des convertisseurs à découpage pour la conception et la commande :
Application à l’onduleur Thèse de doctorat de l’Institut National des Sciences Appliquées de Lyon. Janvier 98.
[Marr 94] W. W. Marr. Eagles 1.1 : A microcomputer software package for analysing fuel efficiency of
electric and gazoline vehicles ISBN 0 947719 63 6 – ISATA27 p453, September 94.
[Mendes 93] E. Mendes Contribution à l’étude de servomoteur à induction. Etude et mise en œuvre de
commandes numériques à flux orienté et adaptative. Thèse de doctorat de l’université Paris 6. Octobre 1993.
[Murata 90] T. Murata, T. Tsuchiya Vector control for induction machine on the application of optimal control theory IEEE Transaction on industrial electronics. Vol. 37 N°4, August 1990. [Trigui 97] R. Trigui
Motorisation asynchrone pour véhicule électrique. Modélisation optimisation et évaluation. Thèse de doctorat de l’Institut National Polytechnique de Lorraine. Juin 1997.
[Trigui 98] R. Trigui, F. Badin, L. Azouzi INRETS - S. Derou, J. Beretta, Peugeot S.A. ‘’Evaluation of EV drive trains’’ Fisita World Automotive Congress, Paris, Septembre
1998.

Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
48
[Trigui 99] R. Trigui, B. Jeanneret, F. Dadin Modélisation des véhicules à architectures complexes sous Simulink. Etude
prospective pour une bibliothèque multi-niveaux. Rapport INRETS-LTE N° 9926. Septembre 1999. [Trigui 00] R. Trigui, F. Harel, B. Jeanneret, F. Badin INRETS, S. Dérou PSA.
‘’Optimisation globale de la commande d’un moteur synchrone à rotor bobiné. Effets sur la consommation simulée de véhicules électriques et hybrides. ‘’ Colloque National GEVIQ’2000. Marseille, Mars 2000.

Annexes __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
49
ANNEXES
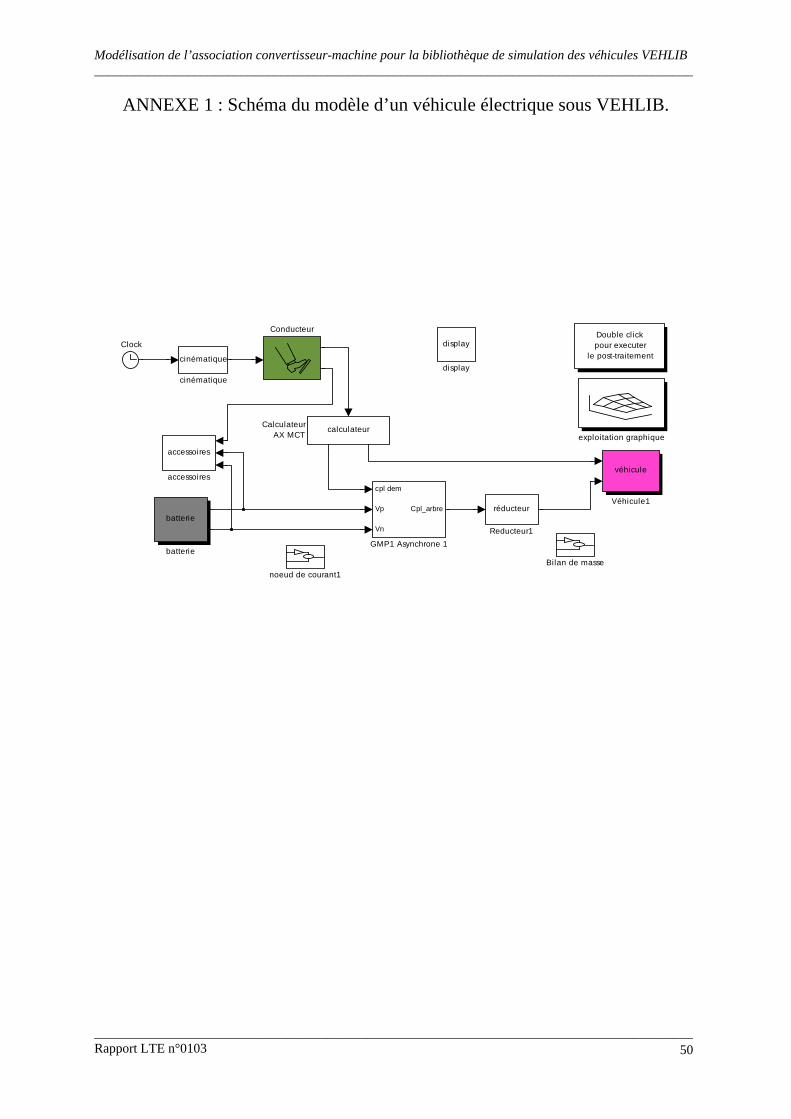
Modélisation de l’association convertisseur-machine pour la bibliothèque de simulation des véhicules VEHLIB __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
50
ANNEXE 1 : Schéma du modèle d’un véhicule électrique sous VEHLIB.
noeud de courant1
exploitation graphique
display
displaycinématique
cinématique
batterie
batterie
accessoires
accessoiresvéhicule
Véhicule1réducteur
Reducteur1
Double cl ick pour executer
le post-traitement
cpl dem
Vp
Vn
Cpl_arbre
GMP1 Asynchrone 1
Conducteur
Clock
calculateurCalculateurAX MCT
Bilan de masse
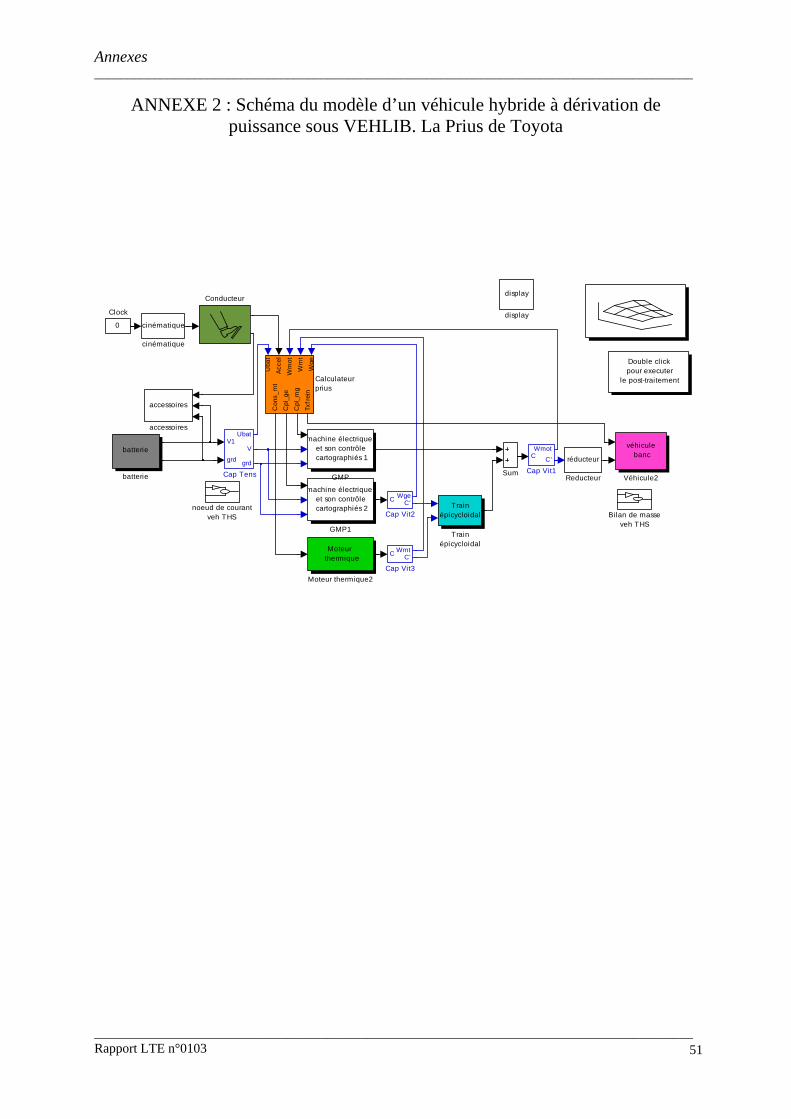
Annexes __________________________________________________________________________________________
__________________________________________________________________________________________ Rapport LTE n°0103
51
ANNEXE 2 : Schéma du modèle d’un véhicule hybride à dérivation de puissance sous VEHLIB. La Prius de Toyota
noeud de courantveh THS
display
displaycinématique
cinématique
batterie
batterie
accessoires
accessoires
véhicule banc
Véhicule2
Trainépicycloidal
Trainépicycloidal
Sum
réducteur
Reducteur
Moteur thermique
Moteur thermique2
Double click pour executer
le post-traitement
machine électrique et son contrôle cartographiés 2
GMP1
machine électrique et son contrôle cartographiés 1
GMP
Conducteur
0
Clock
C WmtC'
Cap Vit3
C WgeC'
Cap Vit2
C Wmot
C'
Cap Vit1
V1
grd
Ubat
V
grd
Cap Tens
Uba
tAc
cel
Wm
otW
mt
Wge
Con
s_m
tC
pl_g
eC
pl_m
gTx
frei
n
Calculateurprius
Bilan de masseveh THS