multi-disciplinary synthesis design and optimization...
TRANSCRIPT
LEADING EDGE FORUM CSC PAPERS Copyright © 2009 Computer Sciences Corporation. All rights reserved.
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
ABSTRACT
Keywords: Multi-disciplinary Design and Optimization (MDO), Neural Networks,
Pareto Optimum Solutions
This paper1 describes a synthesis level multi-disciplinary design and optimization
(MDO) method developed for multi-hull ships. The method is unique in two
respects. First, it uses advanced multi-objective optimization methods (in its broad
scope), integrating powering, stability, sea keeping, hull forms definition, cost, and
payload capacity into a single design tool. Second, it uses neural networks as a
response surface method. More specifically, the paper discusses the use of neural
networks, trained based on sets of Computational Fluid Dynamics (CFD) data, for
estimation of powering and sea keeping through the optimization loop. The paper
presents details of the method and multi-objective optimization results in the form of
Pareto optimum solutions for multi-hull concepts
1 The latest version of this paper, which reflects progress during the last two years
is MULTIDISCIPLINARY SYNTHESIS OPTIMIZATION PROCESS IN
MULTIHULL SHIP DESIGN by Hamid Hefazi, Adeline Schmitz, Igor Mizine,
Steve Klomparens, and Stephen Wiley. This new paper is available from Igor
Mizine, [email protected].
Hamid Hefazi California State University,
Long Beach, Long Beach/USA
Adeline Schmitz
California State University,
Long Beach, Long Beach/USA
Igor Mizine
Geoffrey Boals
CSC
CSC Papers
2009
2
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
.
INTRODUCTION
The vast majority of current U.S. naval auxiliary ships are relatively large mono-hulls
with limited speed capabilities. The OSD guidance known by the rubric “10-30-30”
cites goals for the speeds at which deployments have to be executed that cannot be
met with existing transportation vehicles, particularly the ships on which over 90% of
the materiel needed by ground forces has to move. The desire for high-speed
transit capabilities has resulted in increased interest in non-traditional and multi-hull
platforms for naval missions. Multi-hull ships have many potential advantages over
mono-hull ships; however, their design procedures are not as mature. Further,
multi-hull ships also offer avenues of hydrodynamic design optimization that are not
found on mono-hull ships – such as optimizing of hull spacing or relative hull
proportions. Achieving many desirable sets of performances requires advances in
our ability to predict (and explore) hydrodynamic effects in conjunction with other
constraints such as dynamic structural loads when operating in high sea states and
cost.
Synthesis tools that are used to explore the ship design trade space in the concept
design phase (ASSET, PASS) have been around for many years and are used
widely by industry for mono-hull ships. While some synthesis tools have been
developed for multi-hulls, they are not nearly comparable in depth or level of fidelity
to the mono-hull tools. They are used to develop point solutions of ship designs to
populate and study the trade space, but the difference in the point designs are
determined by the design team. This process could be substantially enhanced by
the application of multi-disciplinary design and optimization (MDO) tools to the
design problem, and by further development of multi-hull synthesis tools.
Comprehensive, computational MDO tools however can be prohibitively expensive
considering the complexities that are involved in accurate analysis of
hydrodynamics, structural loads, cost, etc. Advanced multi-objective optimization
methods in conjunction with advances in our ability to accurately and efficiently
predict these performances are needed if these tools are to be of practical value to
the designer. Such advanced multi-disciplinary ship hull design/optimization tools
will be a valuable resource equally applicable to the design of future commercial or
military high speed vessels (dual-use). The advanced hull forms designed therewith
potentially offer the advantage of reduced drag at a given speed, and thus
increased fuel efficiency and range, and/or reduced structural weight and thus
increased cargo lift capacity while meeting stability and seakeeping criteria.
Most of the MDO works to-date are focused on application to mono-hulls. For
example, Zalek (2007) describes multi-criterion evolutionary optimization of ship
hullforms for propulsion and seakeeping. The problem formulation and development
is applicable to mono-hull frigate type naval surface vessels. Harries et al. (2001),
investigate optimization strategies for hydrodynamic design of fast ferries. A
commercial optimization system is used to integrate various CAD and CFD codes
for calm water resistance and seakeeping. The method is applied to Ro-Ro ferry.
Campana et al. (2007) present results of the MDO of the keel fin of a sailing yacht

3
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
. accounting for hydrodynamic and elasticity. Different MDO formulations are studied
in the context of global optimization (GO) frame work.
Studies applicable to multi-hull ships include, Tahara et al. (2007) who present a
multi-objective optimization approach for a fast catamaran via a Simulation-Based
Design (SBD) framework. A variable fidelity concept is also presented which allows
for integration of accurate, yet time consuming RANS predictions together with fast
potential flow results for optimization. The MDO method only considers resistance
and seakeeping. Another study funded by the Office of Naval Research at
University of Michigan, Beck (2007) is also focusing on the hydrodynamic
(seakeeping and resistance) optimization of multi-hulls. Brown and Neu, (2008) in
the phase I of a study entitled Naval Surface Ship Design Optimization for
Affordability have applied a multi-objective optimization method to a number of case
studies using a simple ship synthesis model, and the US Navy’s Advanced Ship and
Submarine Evaluation Tool (ASSET) in the PHX ModelCenter (MC) design
environment, ASSET (2008), ModelCenter (2008). Their case studies include
LHA(R), a replacement for the US Navy amphibious assault ship, and DDG-51, a
destroyer class vessel. Phase II of their study will include response surface
modeling (RSM), a more detailed design of experiments (DOE) and focus on multi-
hull high speed ships.
Since 1998, CSULB, under programs funded by the Office of Naval Research
(ONR), Besnard et al. (1998), and the Center for Commercial Development of
Transportation Technology (CCDoTT) has been developing advanced automated
optimization methods and computational fluid dynamics (CFD) methods for
applications to fast ship design. Originally, the focus of these programs was shape
optimization of underwater hull forms, such as the Pacific Marine’s blended wing
body (BWB) which was optimized for its lift to drag ratio, Hefazi et al. (2002), Hefazi
et al. (2003). Having demonstrated the feasibility of automated hydrodynamic shape
optimization for lifting bodies using advanced methods such as neural networks,
Schmitz (2007), CSULB in collaboration with Computer Science Corporation (CSC)
initiated the current program to extend these technologies to multi-disciplinary
design and optimization (MDO) of multi-hull ships. Our approach is unique in its
broad scope and use of neural networks as a response surface method.
Generally, the MDO design system consists of synthesis design method (SDM),
hullforms definition and optimization sub-system, seakeeping, structural design
optimization, general & cargo arrangement design optimization, propulsion
machinery sub-systems and more local sub-systems such as: outfit, electrics,
handling systems, etc. Seakeeping, power, and payload are primary functional
relationships, which depending on the stage of the design, are analyzed at various
degrees of fidelity.
Two major challenges of MDO design system are:
MDO needs to formulate a design in which there are several criteria or design
objectives, some of which are conflicting.
Subsystem performance evaluations (such as powering, seakeeping, etc) are often
very complex and (computationally) intensive. Direct evaluation of these
4
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
. performances as part of the optimization process, may make the MDO method too
costly and out of reach of most practical design problems.
To overcome these limitations, our approach, uses advanced multi-objective
optimization methods such as Neighborhood Cultivation Genetic Algorithm (NCGA)
for optimization. Unlike traditional design spiral approaches, multi-objective
optimization keeps various objectives separate and concurrent in order to find the
best possible design, which satisfies the (opposing) objectives and constraints. To
address the subsystem performance evaluation challenge, artificial neural networks
are trained based on model tests or computed data bases and are used in the
optimization process to evaluate various subsystem performances. This innovative
approach replaces the use of highly idealized or empirical methods for evaluation of
subsystem performances (such as powering, seakeeping, etc) during the
optimization process.
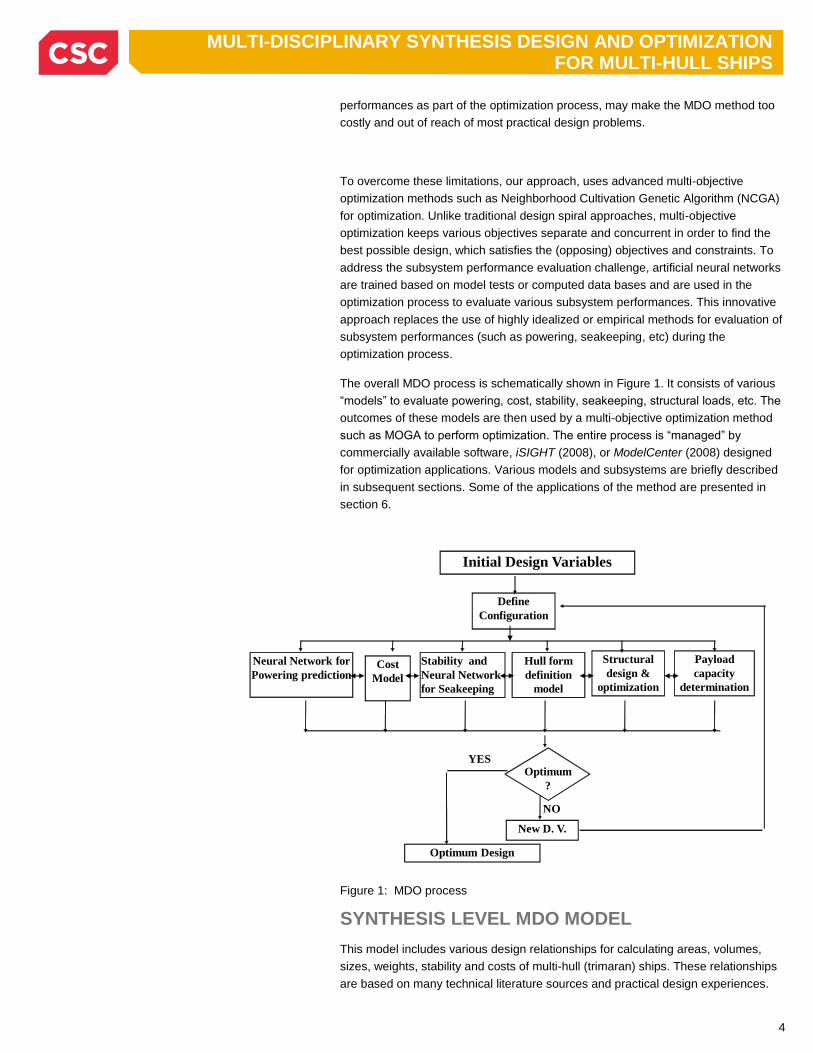
The overall MDO process is schematically shown in Figure 1. It consists of various
“models” to evaluate powering, cost, stability, seakeeping, structural loads, etc. The
outcomes of these models are then used by a multi-objective optimization method
such as MOGA to perform optimization. The entire process is “managed” by
commercially available software, iSIGHT (2008), or ModelCenter (2008) designed
for optimization applications. Various models and subsystems are briefly described
in subsequent sections. Some of the applications of the method are presented in
section 6.
Figure 1: MDO process
SYNTHESIS LEVEL MDO MODEL
This model includes various design relationships for calculating areas, volumes,
sizes, weights, stability and costs of multi-hull (trimaran) ships. These relationships
are based on many technical literature sources and practical design experiences.
New D. V.
Initial Design Variables
Optimum Design
Neural Network for
Powering prediction
Define
Configuration
Optimum
?
YES
NO
Structural
design &
optimization
Stability and
Neural Network
for Seakeeping
Payload
capacity
determination
Cost
Model
Hull form
definition
model
5
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
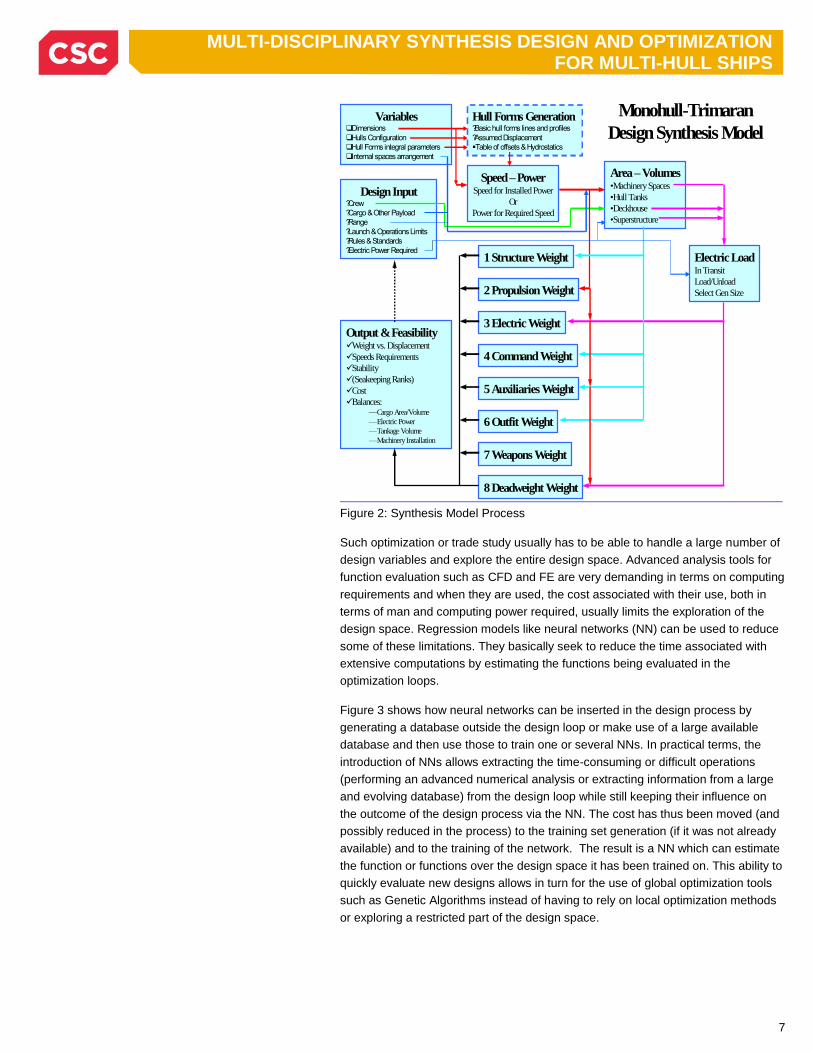
. They are consistent with Navy’s, USCG, ABS regulations, and operational
requirements for specific planned applications. They are organized in various Excel
spreadsheets. Synthesis design model, in short, achieves a weight - buoyancy, and
required - available area/volume balanced design, with required propulsion and
auxiliary machinery and with a check on stability. The flow chart in Figure 2 shows
the synthesis model process. A comprehensive description of the SDM is given in
Hefazi (2006). The overall process includes the following calculations
Speed-power and endurance fuel calculations.
Area/volume calculations including required length, height and volume for
machinery spaces for required propulsion plant and auxiliary machinery.
Required tankage volume for required endurance fuel.
Determines remaining hull area/volume available for payload items.
Sizes superstructure and deckhouse above the main deck to exactly provide
area/volume for the remainder of required payload and crew.
Electric load calculations.
Weight and center of gravity calculations.
Required vs. available GM per USCG windwheel criteria.
COST MODEL
The build strategy and cost estimate analysis for multi-hull (trimarans and
catamarans) and mono-hull ships is performed using SPAR Associates proprietary
cost estimating model called PERCEPTION ESTI-MATE. SPAR’s PERCEPTION
ESTI-MATE cost model has evolved over nearly two decades of algorithm
development and shipyard return cost data collection and evaluation, perception
Esti-mate (2008).
The cost models’ approach for an estimate is based first upon the composition of
the hull’s structural components (decks, bulkheads, shell, double bottoms, etc.),
then the ship systems (mechanical, piping, electrical, HVAC, etc.), and finally other
ship characteristics. Factors considered, and applied, if relevant, are the general
build strategy for on-unit, on-block and on-board construction; the type of shipyard
and its established product line, its facilities and production capabilities; and the
expected competence of the shipyard to plan and manage its resources, costs, and
schedules.
Each cost model employs a comprehensive set of cost estimating relationships, or
CERs. They reside on SPAR’s estimating system called PERCEPTION ESTI-
MATE and represent a wide cross-section of current and historical shipyard
construction costs at many levels of detail. Adjustments can be made (and were
made for the HALSS estimate) as necessary to reflect differing shipyard productivity
factors, construction methods, and material costs. These CERs, while parametric in
nature, focus on a specific area of cost (labor and material) and each reflects the
specific material and the manufacturing and assembly processes required.
Specialized CERs focus on structural component fabrication, assembly, and
6
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
. erection for installation of propulsion systems and for various support activities. The
CERs are based on many different metrics, such as weld length, deck area,
compartment volumes, number of crew (by type crew), kW of propulsion (by type),
etc. Hull structural component costs are based upon component weight by type of
structure and material.
The cost estimates, applicable to a lead ship, are believed to be fair representations
of anticipated true costs based upon the design information. Material costs have
been adjusted to reflect a common year (2007) value. This assumes that for a
multi-year program, appropriate contract escalation clauses have been defined to
index actual costs relative to the base year.
The cost estimates are based upon typical contract cost and schedule performance
for three types of shipbuilders and shipbuilding processes: so-called Virtual
Shipyard (US National Ship Research Program (NSRP) terminology), Dual Use
Shipyard, and Large US Mid Tier Shipyard, as well as shipyards in other countries.
USING NEURAL NETWORKS IN NUMERICAL OPTIMIZATION
As mentioned earlier, a unique feature of our approach is the utilization of artificial
neural networks as a response surface method (RSM) to replace time consuming
and costly direct CFD calculations of powering and seakeeping in the optimization
loop. The method has wide range of other potential applications and is briefly
reviewed here.
The modern approach used in the design of a complex system (the ship or
component inside the ship) usually includes at some level an optimization. In
practical cases, the design tool may either be an optimization or design-of-
experiment software, or a set of test cases identified by an experienced designer
interested in conducting trade studies. The analyses performed at each subsystem
level rely, in general, on a combination of semi-analytical models, advanced
numerical methods such as computational fluid dynamics (CFD) and finite element
analysis (FE), and use of existing databases.
7
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
. Monohull-Trimaran
Design Synthesis Model
Design Input?Crew
?Cargo & Other Payload
?Range
?Launch & Operations Limits
?Rules & Standards
?Electric Power Required
Speed –PowerSpeed for Installed Power
Or
Power for Required Speed
Area –Volumes•Machinery Spaces
•Hull Tanks
•Deckhouse
•Superstructure
Electric LoadIn Transit
Load/Unload
Select Gen Size
7 Weapons Weight
6 Outfit Weight
5 Auxiliaries Weight
4 Command Weight
3 Electric Weight
2 Propulsion Weight
1 Structure Weight
8 Deadweight Weight
Output & FeasibilityWeight vs. Displacement
Speeds Requirements
Stability
(Seakeeping Ranks)
Cost
Balances:—Cargo Area/Volume
—Electric Power
—Tankage Volume
—Machinery Installation
VariablesDimensions
Hulls Configuration
Hull Forms integral parameters
Internal spaces arrangement
Hull Forms Generation?Basic hull forms lines and profiles
?Assumed Displacement
Table of offsets & Hydrostatics
Figure 2: Synthesis Model Process
Such optimization or trade study usually has to be able to handle a large number of
design variables and explore the entire design space. Advanced analysis tools for
function evaluation such as CFD and FE are very demanding in terms on computing
requirements and when they are used, the cost associated with their use, both in
terms of man and computing power required, usually limits the exploration of the
design space. Regression models like neural networks (NN) can be used to reduce
some of these limitations. They basically seek to reduce the time associated with
extensive computations by estimating the functions being evaluated in the
optimization loops.
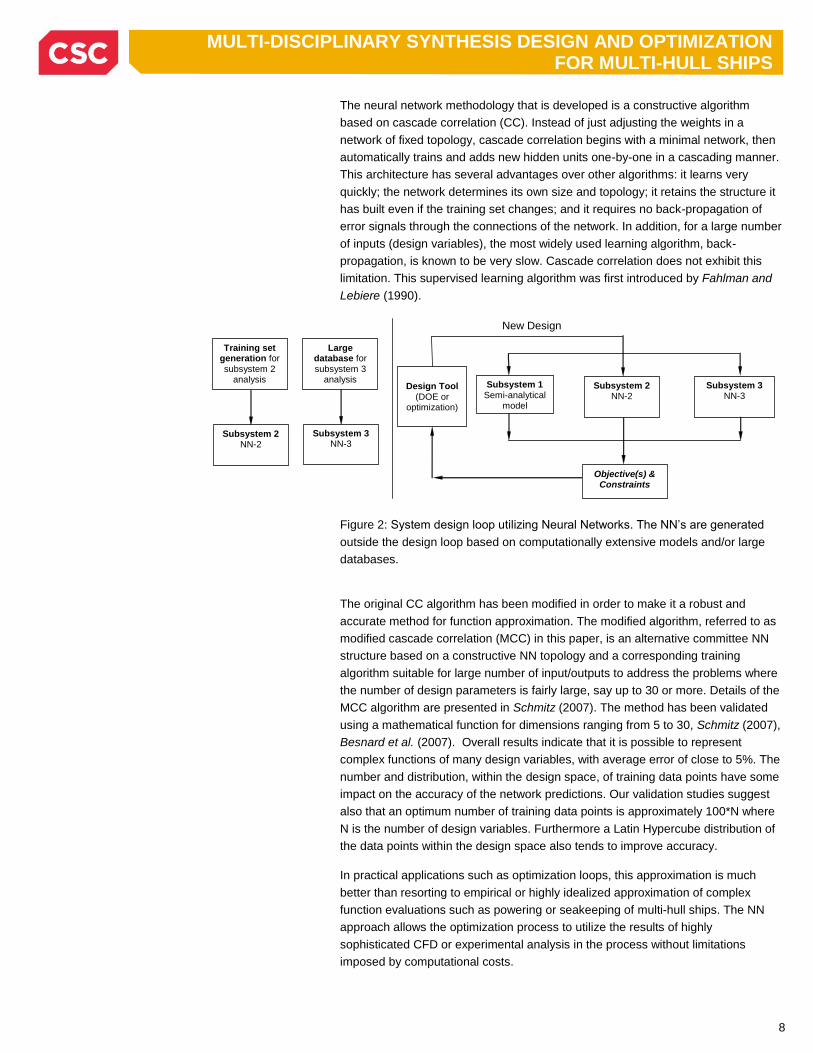
Figure 3 shows how neural networks can be inserted in the design process by
generating a database outside the design loop or make use of a large available
database and then use those to train one or several NNs. In practical terms, the
introduction of NNs allows extracting the time-consuming or difficult operations
(performing an advanced numerical analysis or extracting information from a large
and evolving database) from the design loop while still keeping their influence on
the outcome of the design process via the NN. The cost has thus been moved (and
possibly reduced in the process) to the training set generation (if it was not already
available) and to the training of the network. The result is a NN which can estimate
the function or functions over the design space it has been trained on. This ability to
quickly evaluate new designs allows in turn for the use of global optimization tools
such as Genetic Algorithms instead of having to rely on local optimization methods
or exploring a restricted part of the design space.
8
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
. The neural network methodology that is developed is a constructive algorithm
based on cascade correlation (CC). Instead of just adjusting the weights in a
network of fixed topology, cascade correlation begins with a minimal network, then
automatically trains and adds new hidden units one-by-one in a cascading manner.
This architecture has several advantages over other algorithms: it learns very
quickly; the network determines its own size and topology; it retains the structure it
has built even if the training set changes; and it requires no back-propagation of
error signals through the connections of the network. In addition, for a large number
of inputs (design variables), the most widely used learning algorithm, back-
propagation, is known to be very slow. Cascade correlation does not exhibit this
limitation. This supervised learning algorithm was first introduced by Fahlman and
Lebiere (1990).
Figure 2: System design loop utilizing Neural Networks. The NN’s are generated
outside the design loop based on computationally extensive models and/or large
databases.
The original CC algorithm has been modified in order to make it a robust and
accurate method for function approximation. The modified algorithm, referred to as
modified cascade correlation (MCC) in this paper, is an alternative committee NN
structure based on a constructive NN topology and a corresponding training
algorithm suitable for large number of input/outputs to address the problems where
the number of design parameters is fairly large, say up to 30 or more. Details of the
MCC algorithm are presented in Schmitz (2007). The method has been validated
using a mathematical function for dimensions ranging from 5 to 30, Schmitz (2007),
Besnard et al. (2007). Overall results indicate that it is possible to represent
complex functions of many design variables, with average error of close to 5%. The
number and distribution, within the design space, of training data points have some
impact on the accuracy of the network predictions. Our validation studies suggest
also that an optimum number of training data points is approximately 100*N where
N is the number of design variables. Furthermore a Latin Hypercube distribution of
the data points within the design space also tends to improve accuracy.
In practical applications such as optimization loops, this approximation is much
better than resorting to empirical or highly idealized approximation of complex
function evaluations such as powering or seakeeping of multi-hull ships. The NN
approach allows the optimization process to utilize the results of highly
sophisticated CFD or experimental analysis in the process without limitations
imposed by computational costs.
Subsystem 1 Semi-analytical
model
Design Tool
(DOE or optimization)
New Design
Subsystem 2 NN-2
Subsystem 3 NN-3
Objective(s) & Constraints
Training set generation for subsystem 2
analysis
Subsystem 2 NN-2
Large database for subsystem 3
analysis
Subsystem 3 NN-3

9
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
. MDO SUBSYSTEMS
HULLFORMS DEFINITION
At the present stage of this work, in order to allow practical applications by average
users at an early stage of design, it is decided that the MDO process and all its
models must be able to run on a workstation computer but be scalable to operate
on a server type system. Therefore a commercially available CAD based hullform
definition program is most appropriate. The naval architecture tools of Rhinoceros
and Rhino Marine, that is similar to Fast Ship, have been selected for this purpose,
RhinoMarine (2008). The standard, Rhino Marine process requires the user to
manually enter the waterline heights and to select the hullform that the hydrostatics
is to be performed. This manual procedure is replaced by an automated procedure
in order to allow for incorporation into our optimization application. The process
starts with selection of a parent hullforms for center hull and side hulls. A geometric
modeler interface automatically produces a model of scaled proportions to that of
the desired parent hull selection through the optimization loop. Using RhinoMarine,
the geometric modeler also produces various hydrostatic data and the minimum
wetted surface as output. This information is incorporated into the synthesis design
model for stability calculations.
POWERING
As mentioned earlier, throughout the optimization loop, the powering (coefficient of
residual resistance) is evaluated with a trained neural network. The neural network
approach encompasses three steps:
1. Generation of the training set (TS) & validation set (VS).
2. Neural network training to obtain a NN “evaluator(s)”.
3. Integration of the trained NN evaluator(s) in the optimization process.
A training set (TS) is a set of known data points (design variables and their
associated values, such as objective function(s) and constraints). The training
algorithm attempts to achieve an output, which matches these inputs. A validation
set (VS) is a set which, unlike the TS, is not used for training, but rather is used for
stopping the training. The purpose of the VS is to avoid over-fitting which can occur
with the MCC algorithm. Accurate prediction of the training data is not a valid
measure of NN accuracy. Theoretically it is possible to drive this error to zero. How
well the network represents data that it has not been trained on (VS) is a proper
representation of accuracy. In the absence of access to an existing
comprehensive powering data base for multi-hull configurations of interest
(trimaran), in this study the TS data was generated using the MQLT, Amromin et al.
(2003). Based on a quasi linear theory, MQLT is a CFD code, which has been
verified by comparison with trimaran model test results and proved to be reliable to
assess complex problem of multi-hull interference, Mizine et al. (2004). In view of
reduced CFD cost due to application of neural networks, methods with higher level
of fidelity (such as RANS) can also be used for generating TS data. The TS
database in this work consists of 578 number of CO values computed for three
design variables (separation, stagger and length of center hull). Seventeen
additional data points are used as validation set. The training program is a C++
software in which the MCC algorithm is programmed. The outcome of the training is
a NN in the form of an executable in which the proper number of hidden units and
corresponding weights – found during training – have been implemented. This
10
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
. executable is integrated in the optimization process. The CO determines the
powering requirement and the numbers of engines required which is used by the
SDM model.
SEAKEEPING
Similar to the powering, neural networks are used to predict seakeeping
performance in the MDO process. Using advanced numerical motions analysis, a
TS has been generated using a series of geometrical configurations to evaluate and
log the effects of size, stagger and separation of the side hulls on the motions of the
vessel.
The hull form and hydrostatic conditions were developed with the program
FASTSHIP. The hydrodynamic analysis has been performed with the WASIM
software, Wasim (2008). WASIM is a hydrodynamic program for computing global
responses and local loading on displacement vessels moving at any forward speed.
The simulations are carried out in the time domain, but results may also be
transformed to the frequency domain using Fourier transformations. WASIM is
capable of both linear and non-linear time domain simulations. However, it has been
assumed that the non-linear hydrostatic effects on this trimaran hull form are
negligible, and the motions analysis has been performed with a linear simulation.
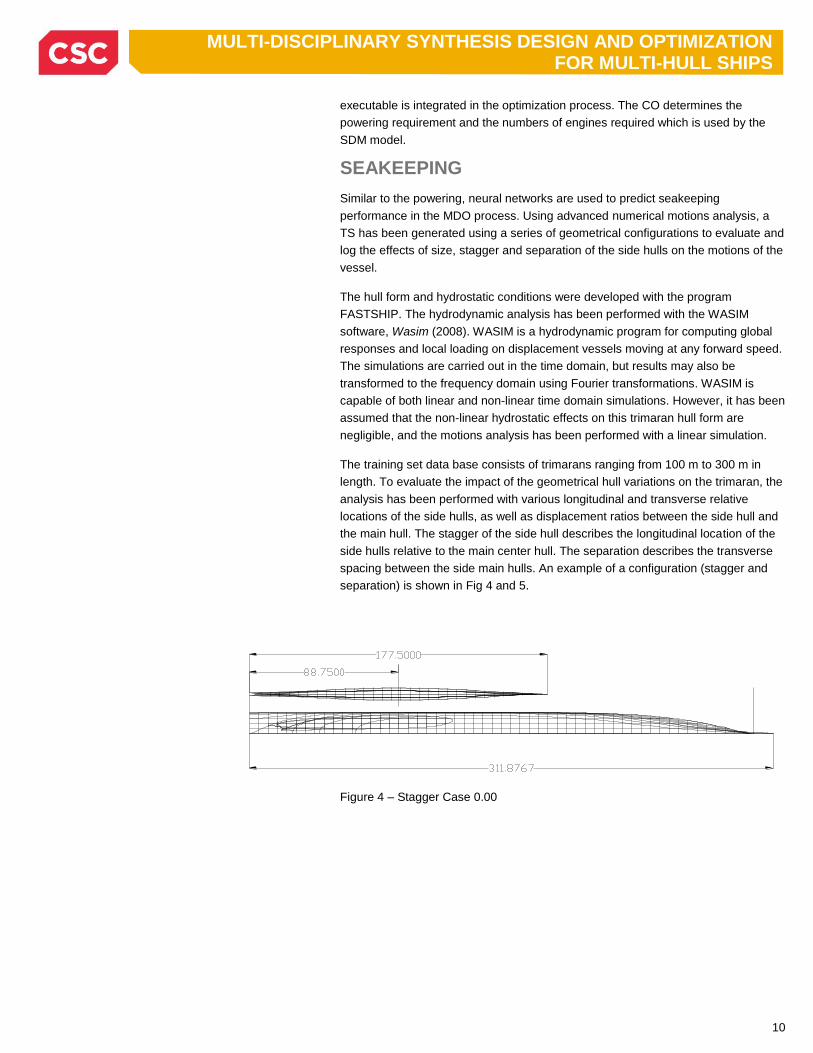
The training set data base consists of trimarans ranging from 100 m to 300 m in
length. To evaluate the impact of the geometrical hull variations on the trimaran, the
analysis has been performed with various longitudinal and transverse relative
locations of the side hulls, as well as displacement ratios between the side hull and
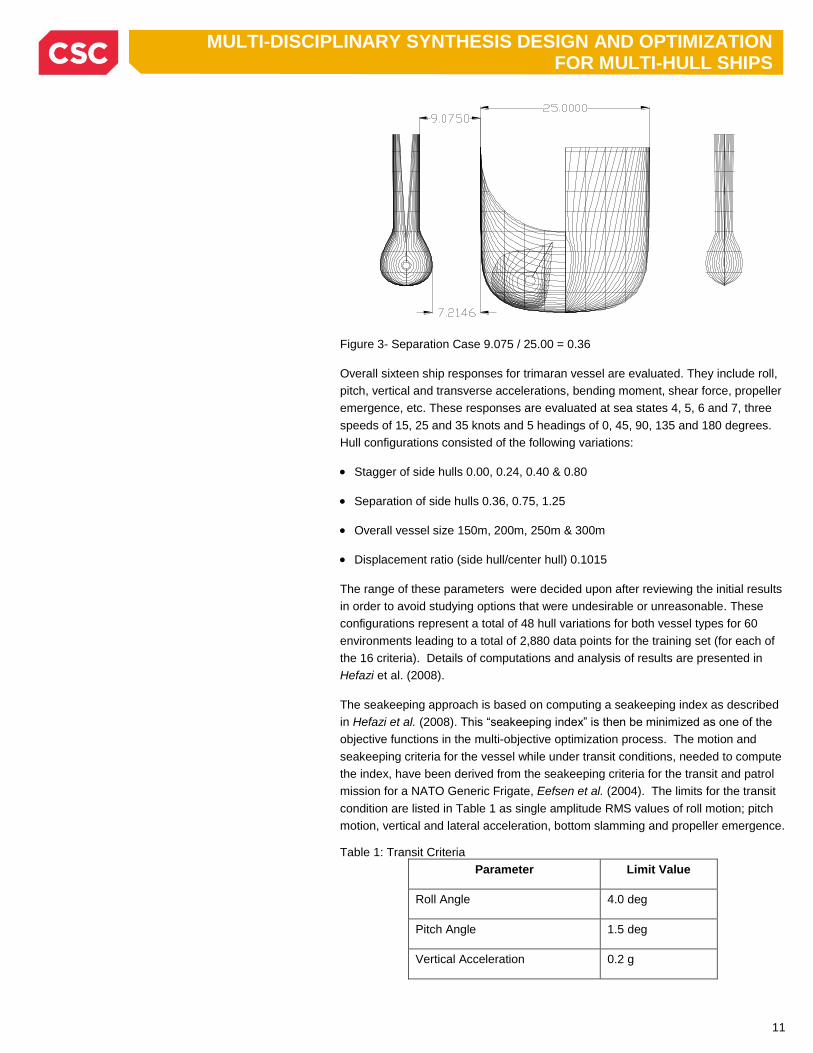
the main hull. The stagger of the side hull describes the longitudinal location of the
side hulls relative to the main center hull. The separation describes the transverse
spacing between the side main hulls. An example of a configuration (stagger and
separation) is shown in Fig 4 and 5.
Figure 4 – Stagger Case 0.00
11
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
.
Figure 3- Separation Case 9.075 / 25.00 = 0.36
Overall sixteen ship responses for trimaran vessel are evaluated. They include roll,
pitch, vertical and transverse accelerations, bending moment, shear force, propeller
emergence, etc. These responses are evaluated at sea states 4, 5, 6 and 7, three
speeds of 15, 25 and 35 knots and 5 headings of 0, 45, 90, 135 and 180 degrees.
Hull configurations consisted of the following variations:
Stagger of side hulls 0.00, 0.24, 0.40 & 0.80
Separation of side hulls 0.36, 0.75, 1.25
Overall vessel size 150m, 200m, 250m & 300m
Displacement ratio (side hull/center hull) 0.1015
The range of these parameters were decided upon after reviewing the initial results
in order to avoid studying options that were undesirable or unreasonable. These
configurations represent a total of 48 hull variations for both vessel types for 60
environments leading to a total of 2,880 data points for the training set (for each of
the 16 criteria). Details of computations and analysis of results are presented in
Hefazi et al. (2008).
The seakeeping approach is based on computing a seakeeping index as described
in Hefazi et al. (2008). This “seakeeping index” is then be minimized as one of the
objective functions in the multi-objective optimization process. The motion and
seakeeping criteria for the vessel while under transit conditions, needed to compute
the index, have been derived from the seakeeping criteria for the transit and patrol
mission for a NATO Generic Frigate, Eefsen et al. (2004). The limits for the transit
condition are listed in Table 1 as single amplitude RMS values of roll motion; pitch
motion, vertical and lateral acceleration, bottom slamming and propeller emergence.
Table 1: Transit Criteria
Parameter Limit Value
Roll Angle 4.0 deg
Pitch Angle 1.5 deg
Vertical Acceleration 0.2 g
12
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
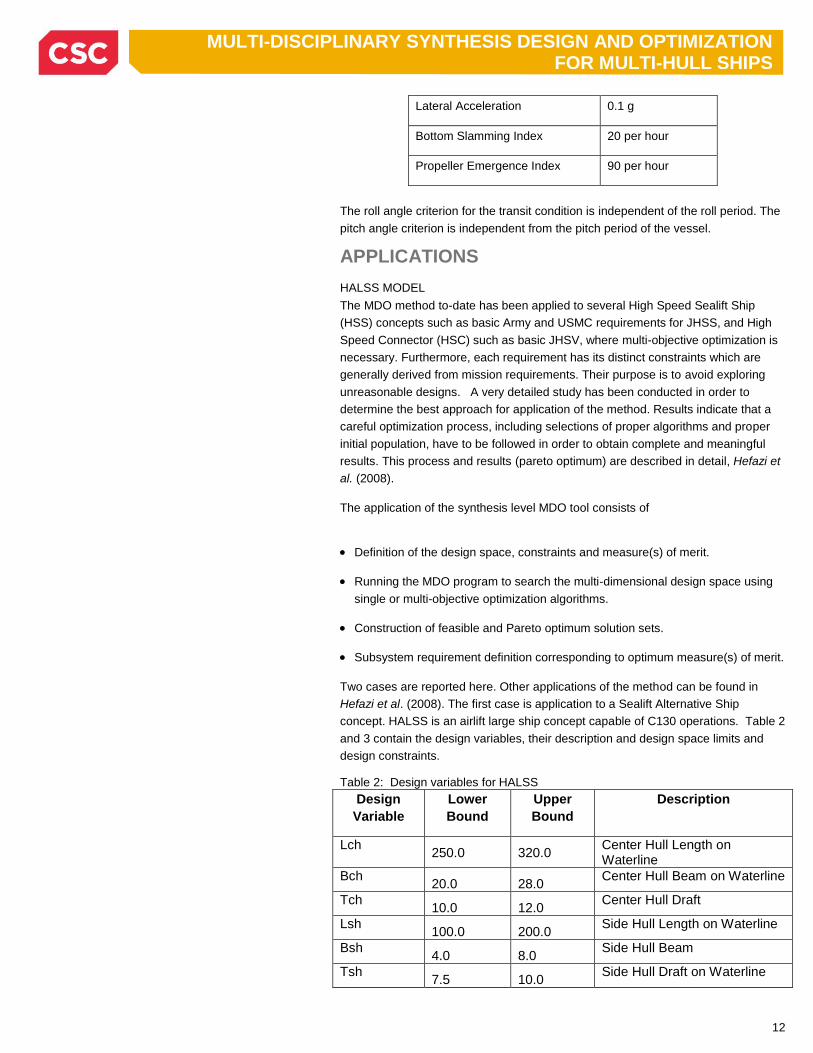
. Lateral Acceleration 0.1 g
Bottom Slamming Index 20 per hour
Propeller Emergence Index 90 per hour
The roll angle criterion for the transit condition is independent of the roll period. The
pitch angle criterion is independent from the pitch period of the vessel.
APPLICATIONS
HALSS MODEL
The MDO method to-date has been applied to several High Speed Sealift Ship
(HSS) concepts such as basic Army and USMC requirements for JHSS, and High
Speed Connector (HSC) such as basic JHSV, where multi-objective optimization is
necessary. Furthermore, each requirement has its distinct constraints which are
generally derived from mission requirements. Their purpose is to avoid exploring
unreasonable designs. A very detailed study has been conducted in order to
determine the best approach for application of the method. Results indicate that a
careful optimization process, including selections of proper algorithms and proper
initial population, have to be followed in order to obtain complete and meaningful
results. This process and results (pareto optimum) are described in detail, Hefazi et
al. (2008).
The application of the synthesis level MDO tool consists of
Definition of the design space, constraints and measure(s) of merit.
Running the MDO program to search the multi-dimensional design space using
single or multi-objective optimization algorithms.
Construction of feasible and Pareto optimum solution sets.
Subsystem requirement definition corresponding to optimum measure(s) of merit.
Two cases are reported here. Other applications of the method can be found in
Hefazi et al. (2008). The first case is application to a Sealift Alternative Ship
concept. HALSS is an airlift large ship concept capable of C130 operations. Table 2
and 3 contain the design variables, their description and design space limits and
design constraints.
Table 2: Design variables for HALSS
Design
Variable
Lower
Bound
Upper
Bound
Description
Lch 250.0 320.0
Center Hull Length on Waterline
Bch 20.0 28.0
Center Hull Beam on Waterline
Tch 10.0 12.0
Center Hull Draft
Lsh 100.0 200.0
Side Hull Length on Waterline
Bsh 4.0 8.0
Side Hull Beam
Tsh 7.5 10.0
Side Hull Draft on Waterline
13
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
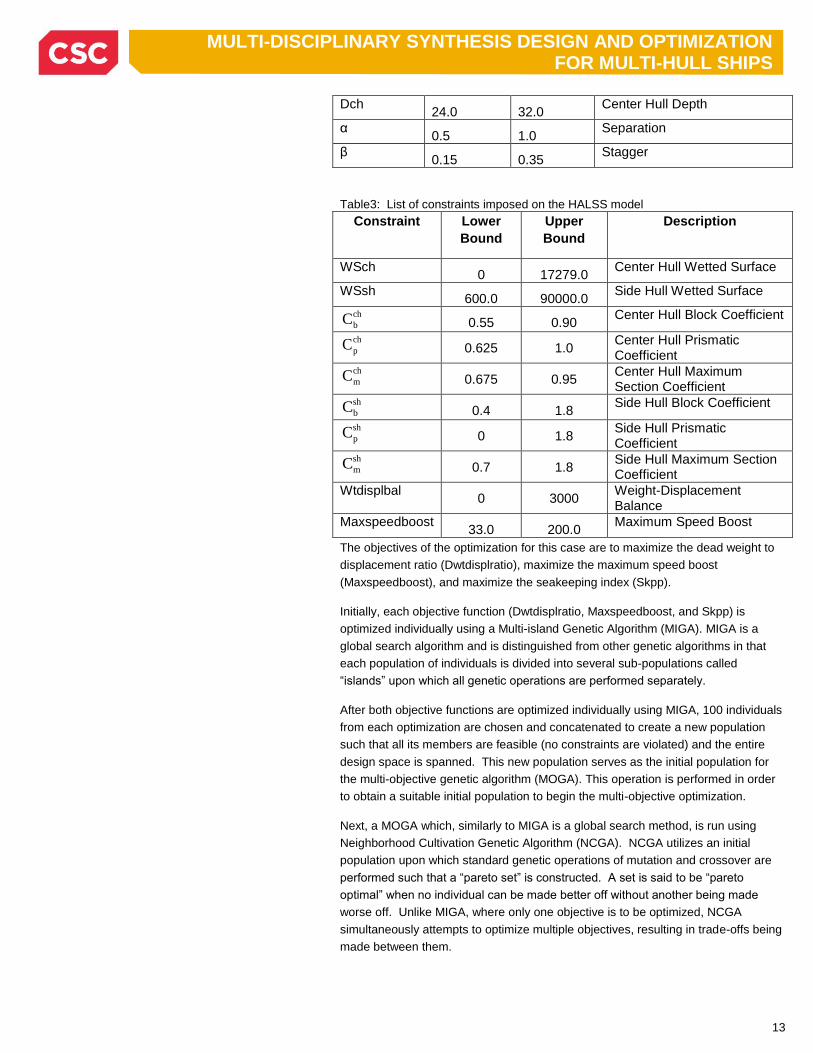
. Dch
24.0 32.0 Center Hull Depth
α 0.5 1.0
Separation
β 0.15 0.35
Stagger
Table3: List of constraints imposed on the HALSS model
Constraint Lower
Bound
Upper
Bound
Description
WSch 0 17279.0
Center Hull Wetted Surface
WSsh 600.0 90000.0
Side Hull Wetted Surface
ch
bC 0.55 0.90
Center Hull Block Coefficient
ch
pC
0.625 1.0 Center Hull Prismatic Coefficient
ch
mC 0.675 0.95
Center Hull Maximum Section Coefficient
sh
bC 0.4 1.8
Side Hull Block Coefficient
sh
pC
0 1.8 Side Hull Prismatic Coefficient
sh
mC 0.7 1.8
Side Hull Maximum Section Coefficient
Wtdisplbal 0 3000
Weight-Displacement Balance
Maxspeedboost 33.0 200.0
Maximum Speed Boost
The objectives of the optimization for this case are to maximize the dead weight to
displacement ratio (Dwtdisplratio), maximize the maximum speed boost
(Maxspeedboost), and maximize the seakeeping index (Skpp).
Initially, each objective function (Dwtdisplratio, Maxspeedboost, and Skpp) is
optimized individually using a Multi-island Genetic Algorithm (MIGA). MIGA is a
global search algorithm and is distinguished from other genetic algorithms in that
each population of individuals is divided into several sub-populations called
“islands” upon which all genetic operations are performed separately.
After both objective functions are optimized individually using MIGA, 100 individuals
from each optimization are chosen and concatenated to create a new population
such that all its members are feasible (no constraints are violated) and the entire
design space is spanned. This new population serves as the initial population for
the multi-objective genetic algorithm (MOGA). This operation is performed in order
to obtain a suitable initial population to begin the multi-objective optimization.
Next, a MOGA which, similarly to MIGA is a global search method, is run using
Neighborhood Cultivation Genetic Algorithm (NCGA). NCGA utilizes an initial
population upon which standard genetic operations of mutation and crossover are
performed such that a “pareto set” is constructed. A set is said to be “pareto
optimal” when no individual can be made better off without another being made
worse off. Unlike MIGA, where only one objective is to be optimized, NCGA
simultaneously attempts to optimize multiple objectives, resulting in trade-offs being
made between them.

14
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
. The results of the NCGA optimization with three objective functions are presented in
Figures 6 and 7; Fig. 6 shows the pareto front for Maxspeedboost vs. Dwtdisplratio
and Fig. 7 shows a three-dimensional representation of the Pareto set.
Table 4 presents the maximum values found for Maxspeedboost, Dwtdisplratio, and
Skpp using NCGA. Point 1 corresponds to maximum Maxspeedboost and is
represented by the white triangle in Figures 6. Point 2 corresponds to maximum
Dwtdisplratio and is represented by the gray square in Figure 6. Point 3
corresponds to maximum Skpp.
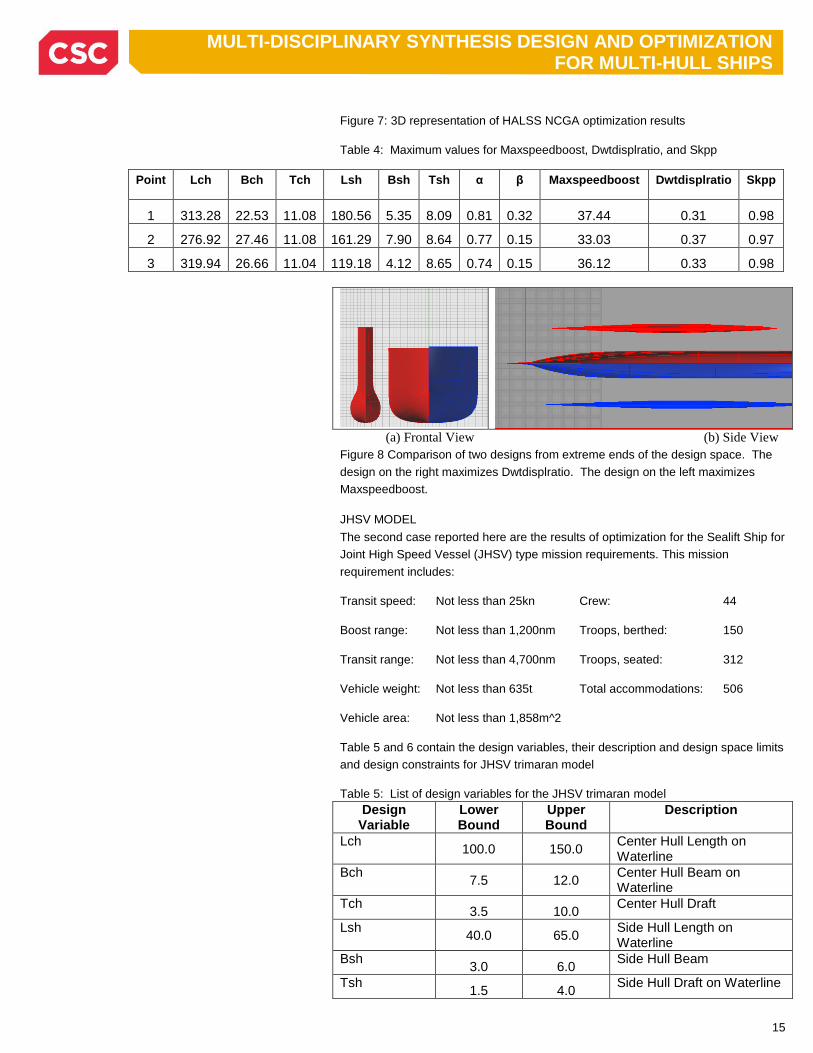
Figure 8 shows a frontal (a) and top (b) view of the HALSS where the left (or top)
side corresponds to point 1 in Table 5, and the right (or bottom) side corresponds to
point 2 in Table 4.
32.5
33
33.5
34
34.5
35
35.5
36
36.5
37
37.5
38
0.28 0.3 0.32 0.34 0.36 0.38
Dwtdisplratio
Ma
xsp
ee
db
oo
st (k
no
ts)
NCGA Pareto
Dead Weight to Displacement Ratio
Maximum Speed Boost
Figure 6: HALSS model NCGA optimization results (Dwtdisplratio vs.
Maxspeedboost)
15
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
.
Figure 7: 3D representation of HALSS NCGA optimization results
Table 4: Maximum values for Maxspeedboost, Dwtdisplratio, and Skpp
Point Lch Bch Tch Lsh Bsh Tsh α β Maxspeedboost Dwtdisplratio Skpp
1 313.28 22.53 11.08 180.56 5.35 8.09 0.81 0.32 37.44 0.31 0.98
2 276.92 27.46 11.08 161.29 7.90 8.64 0.77 0.15 33.03 0.37 0.97
3 319.94 26.66 11.04 119.18 4.12 8.65 0.74 0.15 36.12 0.33 0.98
(a) Frontal View (b) Side View
Figure 8 Comparison of two designs from extreme ends of the design space. The
design on the right maximizes Dwtdisplratio. The design on the left maximizes
Maxspeedboost.
JHSV MODEL
The second case reported here are the results of optimization for the Sealift Ship for
Joint High Speed Vessel (JHSV) type mission requirements. This mission
requirement includes:
Transit speed: Not less than 25kn Crew: 44
Boost range: Not less than 1,200nm Troops, berthed: 150
Transit range: Not less than 4,700nm Troops, seated: 312
Vehicle weight: Not less than 635t Total accommodations: 506
Vehicle area: Not less than 1,858m^2
Table 5 and 6 contain the design variables, their description and design space limits
and design constraints for JHSV trimaran model
Table 5: List of design variables for the JHSV trimaran model
Design Variable
Lower Bound
Upper Bound
Description
Lch 100.0 150.0
Center Hull Length on Waterline
Bch 7.5 12.0
Center Hull Beam on Waterline
Tch 3.5 10.0
Center Hull Draft
Lsh 40.0 65.0
Side Hull Length on Waterline
Bsh 3.0 6.0
Side Hull Beam
Tsh 1.5 4.0
Side Hull Draft on Waterline
16
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
. Dch
9.0 12.0 Center Hull Depth
α 0.75 1.5
Separation
β 0.0 0.35
Stagger
Table 6: List of constraints imposed on the JHSV Trimaran model
Constraint Lower Bound
Upper Bound
Description
WSch Center Hull Wetted Surface
WSsh Side Hull Wetted Surface ch
bC 0.550 0.625
Center Hull Block Coefficient
ch
mC 0.675 0.800
Center Hull Maximum Section Coefficient
sh
bC 0.500 1.000
Side Hull Block Coefficient
sh
mC 0.700 1.800
Side Hull Maximum Section Coefficient
Wtdisplbal -300 300
Weight-Displacement Balance
Maxspeedboost 35.0 200.0
Maximum Speed Boost
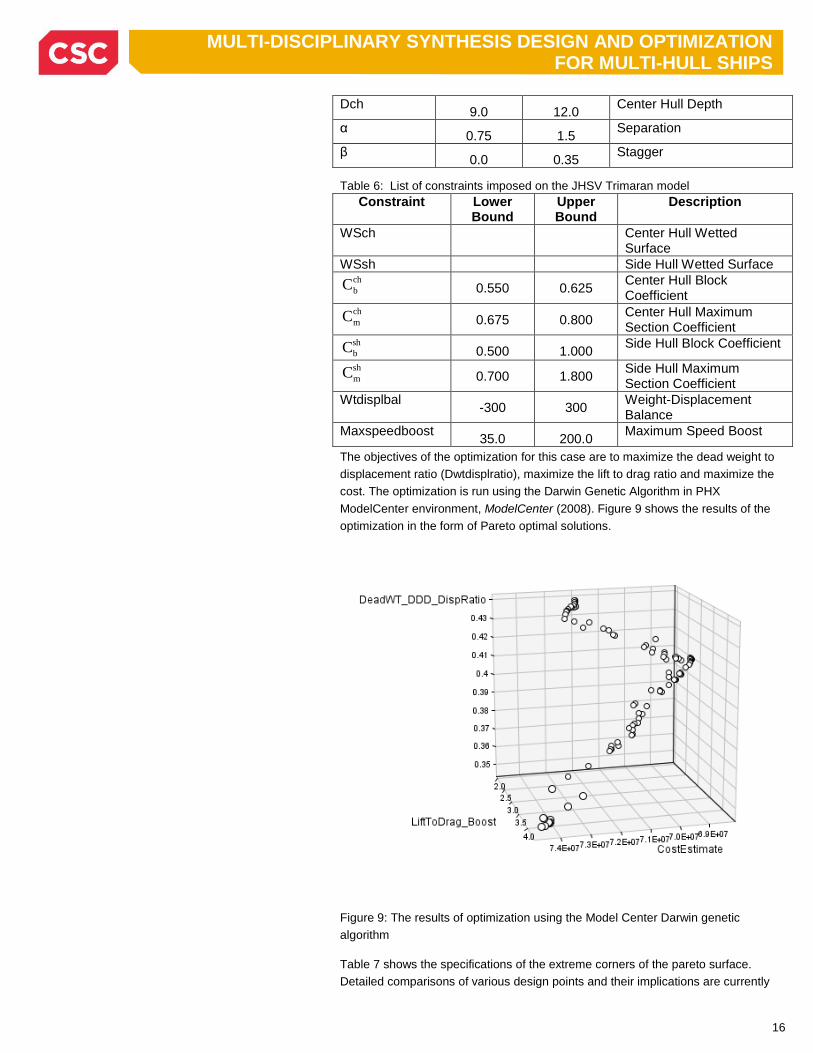
The objectives of the optimization for this case are to maximize the dead weight to
displacement ratio (Dwtdisplratio), maximize the lift to drag ratio and maximize the
cost. The optimization is run using the Darwin Genetic Algorithm in PHX
ModelCenter environment, ModelCenter (2008). Figure 9 shows the results of the
optimization in the form of Pareto optimal solutions.
Figure 9: The results of optimization using the Model Center Darwin genetic
algorithm
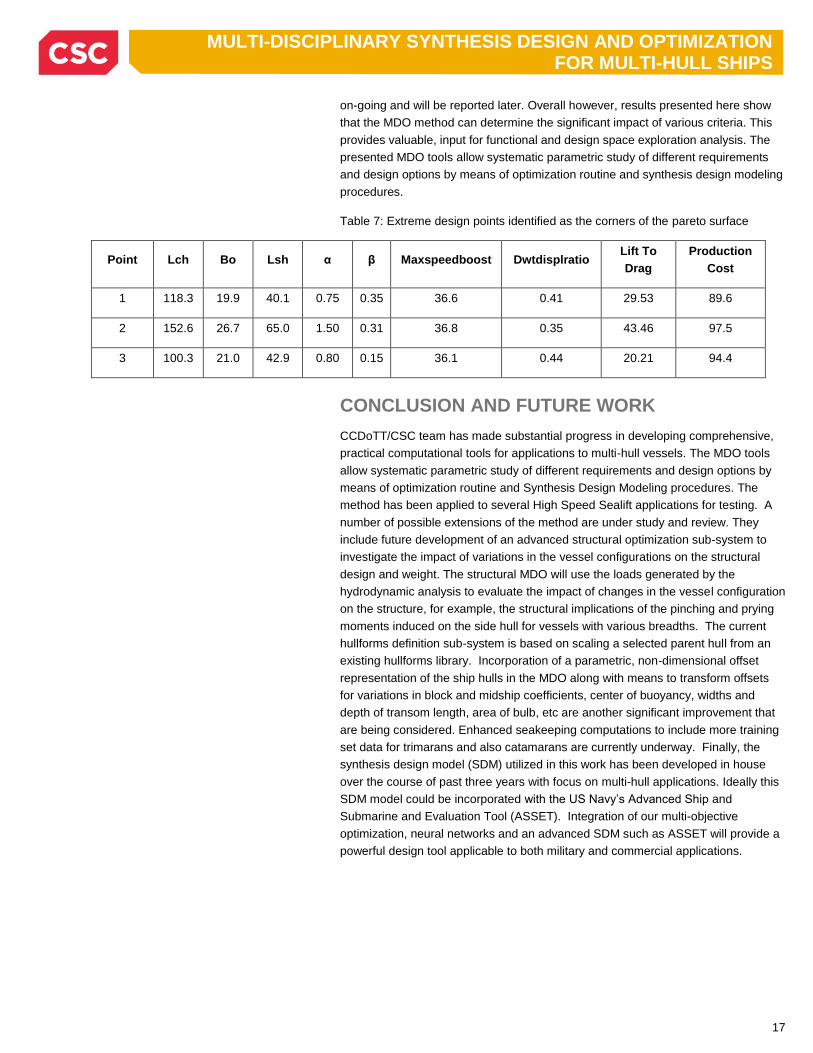
Table 7 shows the specifications of the extreme corners of the pareto surface.
Detailed comparisons of various design points and their implications are currently
17
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
. on-going and will be reported later. Overall however, results presented here show
that the MDO method can determine the significant impact of various criteria. This
provides valuable, input for functional and design space exploration analysis. The
presented MDO tools allow systematic parametric study of different requirements
and design options by means of optimization routine and synthesis design modeling
procedures.
Table 7: Extreme design points identified as the corners of the pareto surface
Point Lch Bo Lsh α β Maxspeedboost Dwtdisplratio Lift To
Drag
Production
Cost
1 118.3 19.9 40.1 0.75 0.35 36.6 0.41 29.53 89.6
2 152.6 26.7 65.0 1.50 0.31 36.8 0.35 43.46 97.5
3 100.3 21.0 42.9 0.80 0.15 36.1 0.44 20.21 94.4
CONCLUSION AND FUTURE WORK
CCDoTT/CSC team has made substantial progress in developing comprehensive,
practical computational tools for applications to multi-hull vessels. The MDO tools
allow systematic parametric study of different requirements and design options by
means of optimization routine and Synthesis Design Modeling procedures. The
method has been applied to several High Speed Sealift applications for testing. A
number of possible extensions of the method are under study and review. They
include future development of an advanced structural optimization sub-system to
investigate the impact of variations in the vessel configurations on the structural
design and weight. The structural MDO will use the loads generated by the
hydrodynamic analysis to evaluate the impact of changes in the vessel configuration
on the structure, for example, the structural implications of the pinching and prying
moments induced on the side hull for vessels with various breadths. The current
hullforms definition sub-system is based on scaling a selected parent hull from an
existing hullforms library. Incorporation of a parametric, non-dimensional offset
representation of the ship hulls in the MDO along with means to transform offsets
for variations in block and midship coefficients, center of buoyancy, widths and
depth of transom length, area of bulb, etc are another significant improvement that
are being considered. Enhanced seakeeping computations to include more training
set data for trimarans and also catamarans are currently underway. Finally, the
synthesis design model (SDM) utilized in this work has been developed in house
over the course of past three years with focus on multi-hull applications. Ideally this
SDM model could be incorporated with the US Navy’s Advanced Ship and
Submarine and Evaluation Tool (ASSET). Integration of our multi-objective
optimization, neural networks and an advanced SDM such as ASSET will provide a
powerful design tool applicable to both military and commercial applications.
18
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
.
ACKNOWLEDGMENT
This work is supported by the US Office of Naval Research, under cooperative
agreement No. N00014-04-2-0003 with the California State University, Long Beach
Foundation Center for the Commercial Deployment of Transportation Technologies
(CCDoTT). The authors would like to sincerely thank the program manager Dr.
Paul Rispin and Mr. Dan Sheridan from ONR for their support, and many important
inputs. Mr. Steve Wiley from CSC has been the primary developer of the SDM. His
experience with many Navy and commercial ships have been essential
contributions to this work. We also thank Viking Systems of Annapolis Maryland for
pioneering the systematic seakeeping calculations for multi-hulls. Their professional
contribution helped to incorporate these comprehensive results in MDO process.
Finally we would like to thank CCDoTT’s Principal Investigator Mr. Stan Wheatley,
program coordinator Mr. Steven Hinds, and program administrator Ms. Carrie
Scoville for their supports.
Glossary of Acronyms:
ABS - American Bureau of Ships
CFD - Computational Fluid Dynamics
HSS - High Speed Sealift Ship
JHSS - Joint High Speed Sealift Ship
JHSV - Joint High Speed Vessel
LWT - Light Weight
MCC - Modified Cascade Correlation
MDO - Multi-disciplinary Design and Optimization
MOGA – Multi-objective Genetic Algorithm
MIGA – Multi-island Genetic Algorithm
NN- Neural Network
NLPQL - Sequential Quadratic Programming
NCGA – Neighborhood Cultivation Genetic Algorithm
TS – Training Set
VS – Validation Set
USCG – US Coast Guard
USMC- US Marine Corp
19
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
.
REFERENCES
AMROMIN, E.; MIZINE, I. (2003), Quasi-Linear Theory of Ship Resistance and CFD
Analysis of Ship’s Environmental Impact, Proceedings of FEDSM’03, 4th ASME-
JSME Joint Fluids Engineering Conference, Honolulu, Hawaii, USA, July.
ASSET (2008), Advanced Surface Ship Evaluation Tool, NAVSEA, Carderock
Division, available at http://www.dt.navy.mil/asset/
BESNARD, E.; SCHMITZ, A.; HEFAZI, H.; SHINDE, R. (2007), Constructive Neural
Networks and their Application to Ship Multi-disciplinary Design Optimization,
Journal of Ship Research, Vol. 51, No. 4., pp. 297-312.
BROWN, A.J.; NEU, (2008) W. Naval Surface Ship Design Optimization for
Affordability, available at
http://www.aoe.vt.edu/~brown/VTShipDesign/VTDesignforAffordabilityFinalReport.h
tm#Theses
CAMPANA, E.F. et al. (2007), Nonlinear Programming Approaches in the
Multidisciplinary Design Optimization of a Sailing Yacht Keel Fin, 9th International
Conference on Numerical Ship Hydrodynamics, Ann Arbor, Michigan, August 5-8.
EEFSEN, T. et al. (2004), Development of Frigate Designs with good Seakeeping
Characteristics, 9th Symposium on Practical Design of Ships and Other Floating
Structures, Luebeck-Travemuende, Germany, Schiffbautechnische Gesellschaft
e.V.
FAHLMAN, S.E.; LEBIERE, C. (1990), The Cascade-Correlation Learning
Architecture, Technical Report CMU-CS-90-100, School of Computer Science,
Carnegie Mellon University, Pittsburgh, PA, USA.
HARRIES, S. et al. (2001), Investigation on Optimization Strategies for the
Hydrodynamic Design of Fast Ferries, FAST 2001, Southampton, UK, 4th-6th
September.
HEFAZI, H. et al. (2003), CFD Design Tool Development and Validation with
accompanying technology demonstrator, CCDoTT FY02 Task 2.20, Center for the
Commercial Deployment of Transportation Technologies, Long Beach, CA.,
available at ftp://www.cdott.org.
HEFAZI, H.; SCHMITZ, A.; SHINDE, R.; MIZINE, I. (2006), Automated
Multidisciplinary Design Optimization Method for Multi-Hull Vessels, CCDoTT FY05
Task 2.32, Center for the Commercial Deployment of Transportation Technologies,
Long Beach, CA., available at ftp://www.ccdott.org.
HEFAZI, H.; SCHMITZ, A.; SHINDE, R.; MIZINE, I. (2008), Automated
Multidisciplinary Design Optimization Method for Multi-Hull Vessels, CCDoTT FY06
Task 4.4, Center for the Commercial Deployment of Transportation Technologies,
Long Beach, CA., available at ftp://www.ccdott.org.
ISIGHT (2008), Engineous Software available at http://www.engineous.com
MIZINE, I.O.; AMROMIN, E.L.; CROOK, L.; DAY, W.; KORPUS, R. (2004), High-
Speed Trimaran Residuary Drag: Numerical Analysis and Model Tests, Journal of
Ship Research, v 48, 248-259
20
MULTI-DISCIPLINARY SYNTHESIS DESIGN AND OPTIMIZATION FOR MULTI-HULL SHIPS
. MODELCENTER (2008), Optworks: ModelCenter by PiBlue available at
http://www.piblue.com/products/optworks_mc.html
PERCEPTION ESTI-MATE (2008), SPAR Associates Inc., available at
http://www.sparusa.com/systemtechnology.htm
RHINOMARINE (2008), RhinoCeros available at
http://www.rhino3d.com/marine.htm
SCHMITZ, A. (2007), Constructive Neural Networks for Function Approximation and
their Application to Computational Fluid Dynamics Shape Optimization, PhD.
Thesis, Claremont Graduate University.
SCLAVOUNOS, P.D.; NAKOS, D.E. (1988), Stability analysis of panel methods for
free surface flows with forward speed. In Proceedings of the 17th Symposium on
Naval Hydrodynamics, Netherlands.
TAHARA, Y. et al. (2007) Global Optimization and Variable Fidelity Strategies in the
Single and Multiobjective Optimal Design of Fast Multihull Ships, 9th International
Conference on Numerical Ship Hydrodynamics, Ann Arbor, Michigan, August 5-8.
WASIM SOFTWARE (2008), Det Norske Veritas, available at http://www.dnv.com
ZALEK, S.F. (2007), Multicriterion Evolutionary Optimization of Ship Hull Forms for
Propulsion and Seakeeping, PhD thesis , Naval Architecture and marine
Engineering , University of Michigan.