numerical methods for odes introduction ! numerical methods for odes ! accuracy ! stability !...
TRANSCRIPT

Numerical Methods for ODEs
Lectures for PSU Summer Programs Xiantao Li

Outline
Introduction
ò Numerical methods for ODEs
ò Accuracy
ò Stability
ò Applications
ò Preserving invariants
ò Preserving symmetry
ò Preserving geometric structures
Some Challenges
ò Stiff ODEs
ò Constrained dynamics
ò Coarse-graining
ò Multiple time scales
ò Statistical mechanics

Ordinary Differential Equations
ò General form
ò Applications
ò Mechanics
ò Molecular models
ò Chemical reactions
ò Discretization of PDEs
ò Examples from 251
ò Mass-spring model, population model, motion in space …
ò For most ODEs, the solutions can be obtained from analytical methods.
x
0 = f(x, t)

Numerical Solutions
ò Exact solution
ò Numerical solution
ò Numerical methods
ò Time discretization
ò Example: uniform step size:
ò Euler’s method:
x(t) = �(t, x(0))
x(t) = (t, x(0);�t)
⌧ = {t0, t1, · · · , tN} ⇢ [0, T ]
tj = j�t, j � 0
x(tj+1)� x(tj)
�t
= f(x(tj), tj)

A Two-Stage Runge-Kutta Method
ò First stage:
ò Second stage:
ò Numerical error
ò Higher order RK methods are available (try rk45 in Matlab)
k1 = f(x(tj), tj), x(tj+1)⇤ = x(tj) +�tk1
k2 = f(x(tj+1)⇤, tj+1), x(tj+1) = x(tj) +
�t
2
⇥k1 + k2
⇤
k�(t)� (t)k �t2eLt.

Inheritance of Asymptotic Stability
ò For a linear system, is stable if all eigenvalues of A are negative.
ò For a nonlinear system, , an equilibrium is stable if the eigenvalues of are negative.
ò A numerical method is stable if the stability of the linear system is inherited.
ò Typically, the step size has to be sufficiently small (inverse proportional to the eigenvalues) in order for the method to be stable.
ò The problem becomes stiff when some eigenvalues are large.
x
0 = Ax, x = 0
x
0 = f(x) x0
rf(x0)
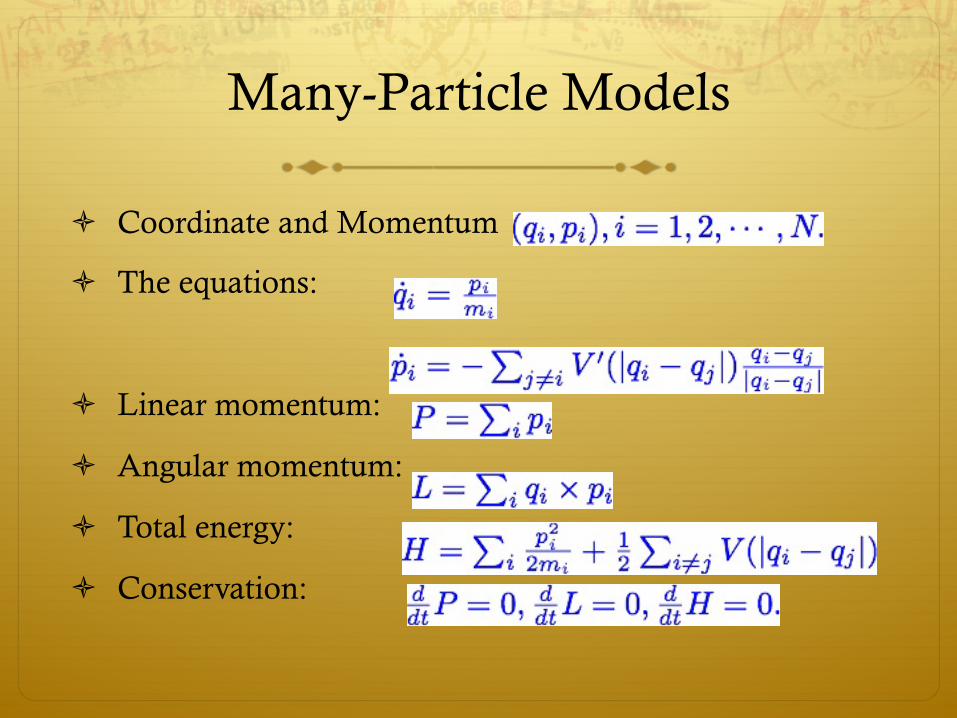
Many-Particle Models
ò Coordinate and Momentum
ò The equations:
ò Linear momentum:
ò Angular momentum:
ò Total energy:
ò Conservation:

First Integrals (Invariants)
ò In general, for
ò is a first integral if
ò Most numerical methods preserve linear invariant
ò Only some methods preserve quadratic invariants
ò In general, it is not possible to exactly preserve invariants of higher order.

Symmetry
ò If the function is symmetric wrt
ò The solutions of the ODEs will be called ρ- reversible
ò
ò For example,
ò A numerical method is ρ- reversible if the solution satisfies the same properties.
ò Explicit RK methods are not symmetric.

Symplectic Structure
ò A linear mapping A is symplectic if
ò A nonlinear mapping g is symplectic if

Hamiltonian systems
ò Hamilton’s principle
ò Examples: mass spring model, many-body problems, pendulum model, Lotka-Volterra model etc.
ò The mapping is symplectic
ò A numerical method is symplectic if it defines a symplectic mapping

Symmetric and symplectic methods
ò Symmetric methods
ò Order of accuracy is always even
ò Very convenient for an extrapolation procedure
ò Symplectic methods
ò Very good energy conservation properties
ò Promising accuracy over long time integration
ò Provide good statistics.

Dimension Reduction: I
ò A Hamiltonian system
ò Imposing constraints
ò Effectively, there are only n free variables
ò Example: flexible pendulum
y0 = JrH(y)
c(y) = 0, c : RN ! RN�n
CSE/MATH Homework 3
Due Oct 14, 2008
1. 6.4, pp 306.
2. 6.9, pp 306.
3. Consider a pendulum system consisting of a point mass m and a massless spring with springconstant 1
!2 . x = (x1, x2) and (mv1,mv2) are used as the coordinate and momenta for the mass
respectively. The total energy of the system is given by,
H = K + U =1
2(mv2
1 + mv22) + mgx2 +
1
2!2
!
"
x21+ x2
2! l)2,
where l is the natural length of the spring and g denotes the gravity. The equation of motion forthe mass is given by,
mx!! = !"U.
Choose the parameters m = 1, l = 1, g = 1, and ! = 10"5. Integrate the system using the three-stage Runge-Kutta-Gauss method with stepsize !t = 0.01 until T = 20. Initially the mass is heldat x0. Choose x0 = (l, 0) and x0 = (l + !, 0). For the numerical output, plot the position (bothcomponents), velocity (both components), and total energy.
4. The system,#
$
%
x!
1 = !K1x1x2 + K2x3,
x!
2 = !K1x1x2 + K2x3 ! K3x2x3,
x!
3 = K1x1x2 ! K2x3 ! K3x2x3,
describes a chemical process. x1 and x2 represent the concentration of the species A and B, and x3
represents the concentration of an intermediate species X. Solve these di"erential equations usingthe two-stage and three-stage Runge-Kutta-Radau method. For the computer simulation, pick theparameters K1 = K2 = 0.1, K3 = 100, the step size !t = 0.05, T = 100, initial condition (1, 1, 0).Compare the results to an explicit method.
1

Dimension Reduction: II
ò A large system
ò Some quantities of interest
ò Remaining degrees of freedom:
ò Effective equation:
ò S(t): memory function
ò R(t): random noise
x
0 = �Ax, x 2 RN, A 2 RN⇥N
, N � 1.
y = Bx, y 2 Rn, B 2 Rn⇥N
z = Cx, z 2 RN�n, B 2 R(N�n)⇥N
My0 = �Ky +
Z t
0S(t� s)y(s)ds+R(t)

Summer Project I
ò Minimum energy path (MEP)
ò The most efficient path from one stable state to another
ò The most probable path
ò Represents rare but important events
ò ODEs with boundary conditions

Summer Project II
ò ODEs with multiple time scales
ò An example,
ò A multiscale method targeting the slow variables only
ò Large time step size
⇢x
0 = f(x, y)y
0 = � 1" (y � '(x))