overview of chess center for hybrid and embedded software systems edward a. lee robert s. pepper...
Post on 21-Dec-2015
219 views
TRANSCRIPT

Overview of CHESSCenter for Hybrid and Embedded Software Systems
Edward A. LeeRobert S. Pepper Distinguished ProfessorCHESS DirectorUC Berkeley
Berkeley, CA
March 30, 2009

Lee, Thomlin, Berkeley 2
University of California at Berkeley
UC Berkeley has one of the best public engineering schools in the world.
Berkeley Engineering

Lee, Thomlin, Berkeley 3
Overview of EECS at Berkeley

Lee, Thomlin, Berkeley 4
Faculty:Elad AlonBernhard BoserRobert K. BraytonRobert W. BrodersenStephen E. DerenzoPaul R. GrayThomas A. HenzingerKurt Keutzer (coordinator)Andreas KuehlmannErnest S. KuhEdward A. LeeGeorge NeculaClark NguyenAli NiknejadBorivoje NikolicAlbert PisanoKameshwar PoollaJan M. RabaeyAlberto Sangiovanni-VincentelliSanjit A. SeshiaClaire TomlinJohn Wawrzynek
•Electronic Design AutomationAlgorithms and techniques to support computer-aided design and optimization of complex hardware and software systems.
•Embedded Software SystemsModels of computation, specification languages, real-time systems, hardware and software synthesis and compilation for electronic systems.
•Modeling and VerificationModels of hardware and software systems together with analysis techniques that identify design flaws, performance problems, and vulnerabilities.
Design Sciences Research Area

Lee, Thomlin, Berkeley 5
Chess: Center for Hybrid and Embedded Software Systems
Principal Investigators Thomas Henzinger (EPFL) Edward A. Lee (Berkeley) Alberto Sangiovanni-Vincentelli (Berkeley) Shankar Sastry (Berkeley) Janos Sztipanovits (Vanderbilt) Claire Tomlin (Berkeley)
Executive Director Christopher Brooks
Associated Faculty David Auslander (Berkeley, ME) Ahmad Bahai (Berkeley) Ruzena Bajcsy (Berkeley) Gautam Biswas (Vanderbilt) Ras Bodik (Berkeley, CS) Bella Bollobas (Memphis) Karl Hedrick (Berkeley, ME) Gabor Karsai (Vanderbilt) Kurt Keutzer (Berkeley) George Necula (Berkeley, CS) Koushik Sen (Berkeley, CS) Sanjit Seshia (Berkeley) Jonathan Sprinkle (Arizona) Masayoshi Tomizuka (Berkeley, ME) Pravin Varaiya (Berkeley)
This center, founded in 2002, blends systems theorists and application domain experts with software technologists and computer scientists.
Some Research Projects Precision-timed (PRET) machines Distributed real-time computing Systems of systems Theoretical foundations of CPS Hybrid systems Design technologies Verification Intelligent control Modeling and simulation
Applications Air traffic control Avionics Automotive Building systems Factory automation Instrumentation Medical systems Process control Synthetic biology Test &
measurement
the Berkeley directors of Chess

Lee, Thomlin, Berkeley 6
Hybrid Systems ModelsWhere it started
A model of a spring-mass system with collisions, modeled in Ptolemy II:
Consider the velocity of each mass.Is it continuous? What about the acceleration?
Toyota test cell at Berkeley used to experiment with hybrid systems models.

Lee, Thomlin, Berkeley 7
Cyber-Physical Systems (CPS)Where it is going
CPS: Orchestrating networked computational resources with physical systems.

Lee, Thomlin, Berkeley 8
The CPS Vision
Networked computers have already changed the way humans communicate and manage information. The change we envision is to the way humans manage their physical environment, including for example transportation, energy, health, and environmental quality. This change requires computing and networking technologies to embrace not just information, but also physical dynamics. The impact of this change could well rival that of the information revolution.

Lee, Thomlin, Berkeley 9
Some CPS applications:
telepresence unoccupied air/space vehicles distributed physical games traffic control and safety financial networks medical devices and systems assisted living and elder care advanced automotive systems energy conservation environmental control aviation systems critical infrastructure (power, water) distributed robotics military systems smart structures biosystems (morphogenesis,…)
Potential impact social networking and games safe/efficient transportation fair financial networks integrated medical systems distributed micro power
generation military dominance economic dominance disaster recovery energy efficient buildings alternative energy pervasive adaptive
communications distributed service delivery …
Dec. 11, 2006: Dancers in Berkeley dancing in
real time with dancers in Urbana-Champagne
(Prof. Bacjsy’s group)

Lee, Thomlin, Berkeley 10
Example: Toyota autonomous vehicle technology roadmap
Source: Toyota Web site
Lee, Thomlin, Berkeley 11
Where CPS Differs fromthe traditional embedded systems problem:
The traditional embedded systems problem:Embedded software is software on small computers. The technical problem is one of optimization (coping with limited resources).
The CPS problem:Computation and networking integrated with physical processes. The technical problem is managing time and concurrency in networked computational systems.

Lee, Thomlin, Berkeley 12
Cyber Physical Systems:Computational +
Physical
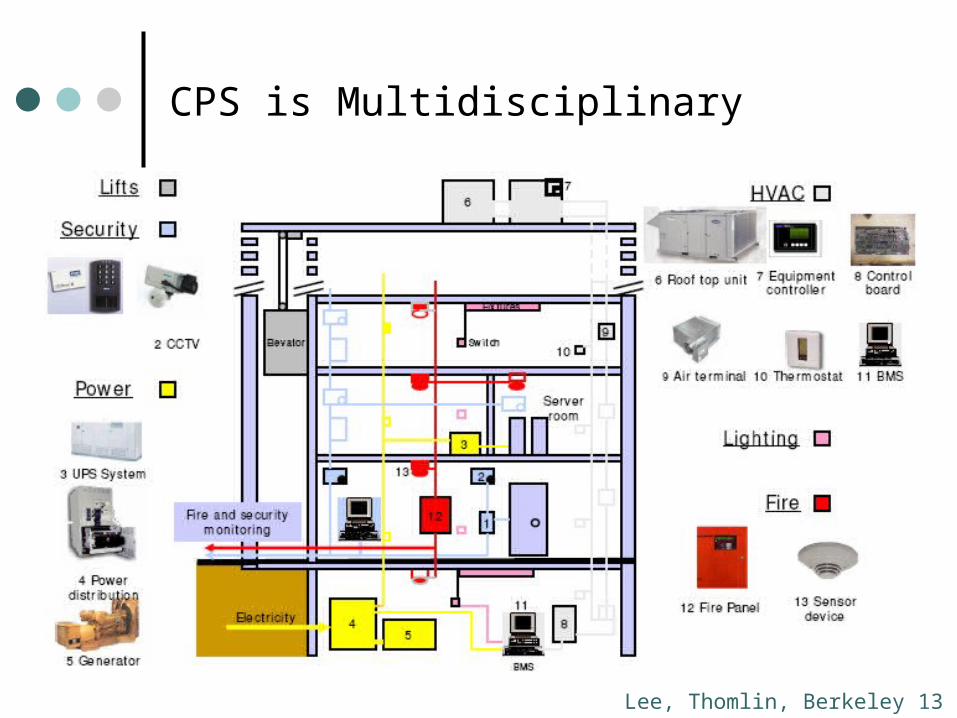
CPS is Multidisciplinary
Computer Science:
Carefully abstracts the physical world
System Theory:
Deals directly with physical quantities
Lee, Thomlin, Berkeley 13
CPS is Multidisciplinary

Lee, Thomlin, Berkeley 14
Some of the CPS Research in Chess
Foundations: Timed computational semantics.
Bottom up: Embedded processors (PRET).
Top down: Distributed real-time systems (PTIDES).
Holistic: Scalable model-based design.
Applications: Air traffic control.
Lee, Thomlin, Berkeley 15
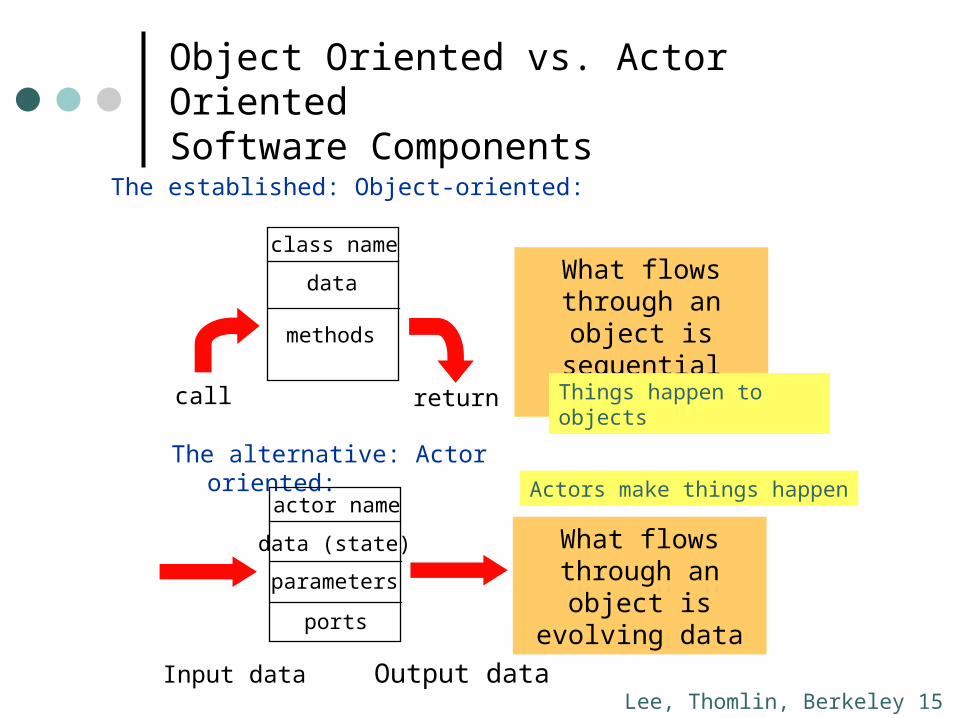
Object Oriented vs. Actor OrientedSoftware Components
The alternative: Actor oriented:
actor name
data (state)
ports
Input data
parameters
Output data
What flows through an object is
evolving data
class name
data
methods
call return
What flows through an object is
sequential control
The established: Object-oriented:
Things happen to objects
Actors make things happen

Lee, Thomlin, Berkeley 16
Timed Software Semantics
s S N
Causal systems operating on signals are usually naturally (Scott) continuous.
concurrent actor-oriented models
abstraction
fixed-point semantics
super-dense time

Lee, Thomlin, Berkeley 17
Results
Papers:[1] Lee and Matsikoudis, "
The Semantics of Dataflow with Firing," in From Semantics to Computer Science: Essays in memory of Gilles Kahn, Cambridge 2009.
[2] Ye Zhou and Edward A. Lee. "Causality Interfaces for Actor Networks," ACM Trans. on Embedded Computing Systems, April 2008.
[3] Liu and Lee, "CPO Semantics of Timed Interactive Actor Networks,” Theoretical Computer Science 409 (1): pp.110-25, 2008..
[4] Lee, " Application of Partial Orders to Timed Concurrent Systems," article in Partial order techniques for the analysis and synthesis of hybrid and embedded systems, in CDC 07.
[5] Lee and Zheng, "Leveraging Synchronous Language Principles for Heterogeneous Modeling and Design of Embedded Systems," EMSOFT ’07.
[6] Liu, Matsikoudis, and Lee. "Modeling Timed Concurrent Systems," CONCUR ’06.
[7] Cataldo, Lee, Liu, Matsikoudis and Zheng "A Constructive Fixed-Point Theorem and the Feedback Semantics of Timed Systems," WODES'06
etc. ...
Software:Ptolemy II realizes a number of
timed concurrent models of computation (MoCs) with well-founded rigorous semantics.
Ph.D. Theses:
[1] Haiyang Zheng, "Operational Semantics of Hybrid Systems," May 18, 2007.
[2] Ye Zhou, "Interface Theories for Causality Analysis in Actor Networks," May 15, 2007.
[3] Xiaojun Liu, "Semantic Foundation of the Tagged Signal Model," December 20, 2005.
Lee, Thomlin, Berkeley 18
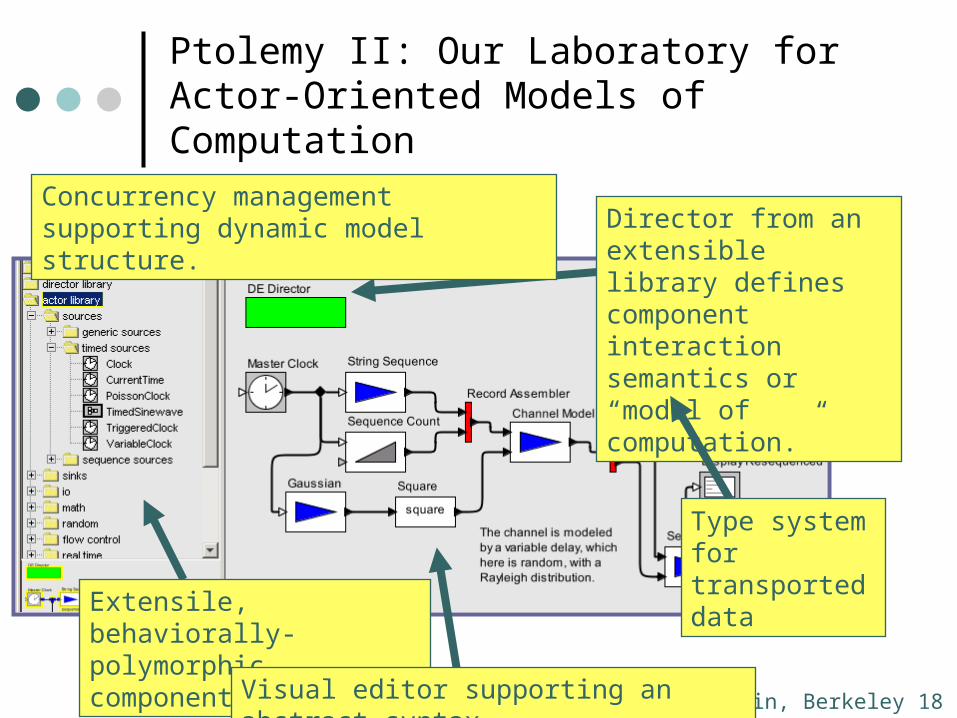
Ptolemy II: Our Laboratory for Actor-Oriented Models of Computation
Director from an extensible library defines component interaction semantics or “model of computation.”
Extensile, behaviorally-polymorphic component library.
Visual editor supporting an abstract syntax
Type system for transported data
Concurrency management supporting dynamic model structure.

Lee, Thomlin, Berkeley 19
Some of the CPS Research in Chess
Foundations: Timed computational semantics.
Bottom up: Embedded processors (PRET).
Top down: Distributed real-time systems (PTIDES).
Holistic: Scalable model-based design.
Applications: Air traffic control.

Lee, Thomlin, Berkeley 20
Bottom Up: Embedded Processors
Precision-Timed (PRET) MachinesMake temporal behavior as important as logical function.
Timing precision with performance: Challenges: Memory hierarchy (scratchpads?) Deep pipelines (interleaving?) ISAs with timing (deadline instructions?) Multicore (dedicated I/O & real-time processors?) Predictable memory management (Metronome?) Languages with timing (discrete events? Giotto?) Predictable concurrency (synchronous languages?) Composable timed components (actor-oriented?) Precision networks (TTA? Time synchronization?)
See S. Edwards and E. A. Lee, "The Case for the Precision Timed (PRET) Machine," in the Wild and Crazy Ideas Track of the Design Automation Conference (DAC), June 2007.

Lee, Thomlin, Berkeley 21
PRET Project (Berkeley, Columbia)
Funding from NSF, Toyota, National Instruments, plus cooperation with Xilinx, Synfora, and Tidorum
Staffing: Edward A. Lee (UCB PI) Stephen Edwards (Columbia co-PI) Jan Rabaey (UCB co-PI) John Wawrzynek (UCB co-PI) Christopher Brooks (Technical staff) Hiren Patel (postdoc) Hugo Andrade (NI VIF) Shanna-Shaye Forbes (UCB grad student) Sunjun Kim (Columbia grad student) Ben Lickly (UCB grad student) Isaac Liu (UCB grad student)

Lee, Thomlin, Berkeley 22
Some of the CPS Research in Chess
Foundations: Timed computational semantics.
Bottom up: Embedded processors (PRET).
Top down: Distributed real-time systems (PTIDES).
Holistic: Scalable model-based design.
Applications: Air traffic control.

Lee, Thomlin, Berkeley 23
PTIDES: Programming Temporally Integrated Distributed Embedded Systems
Distributed execution under DE semantics, with “model time” and “real time” bound at sensors and actuators.
Input time stamps are ≥ real time
Input time stamps are ≥ real time
Output time stamps are ≤ real time
Output time stamps are ≤ real time
Lee, Thomlin, Berkeley 24
PTIDES Project
Funding from NSF, Agilent, HSBC, IBM, Toyota, and the State of California MICRO program, in cooperation with the University of Salzburg, Austria.
Staffing: Edward A. Lee (UCB PI) Christopher Brooks (Technical staff) Patricia Derler (Univ. Salzburg grad student) Slobodan Matic (postdoc) Thomas Feng (UCB grad student) Ben Lickly (UCB grad student) Stefan Resmerita (Univ. Salzburg technical staff) Yang Zhao (UCB grad student, Google technical staff) Jia Zou (UCB grad student)
Lee, Thomlin, Berkeley 25
Some of the CPS Research in Chess
Foundations: Timed computational semantics.
Bottom up: Embedded processors (PRET).
Top down: Distributed real-time systems (PTIDES).
Holistic: Scalable model-based design.
Applications: Air traffic control.

Lee, Thomlin, Berkeley 26
Hierarchical MultimodelingHierarchical compositionsof models of computation. Maintaining temporal semantics across MoCs is a main challenge.
Lee, Thomlin, Berkeley 27
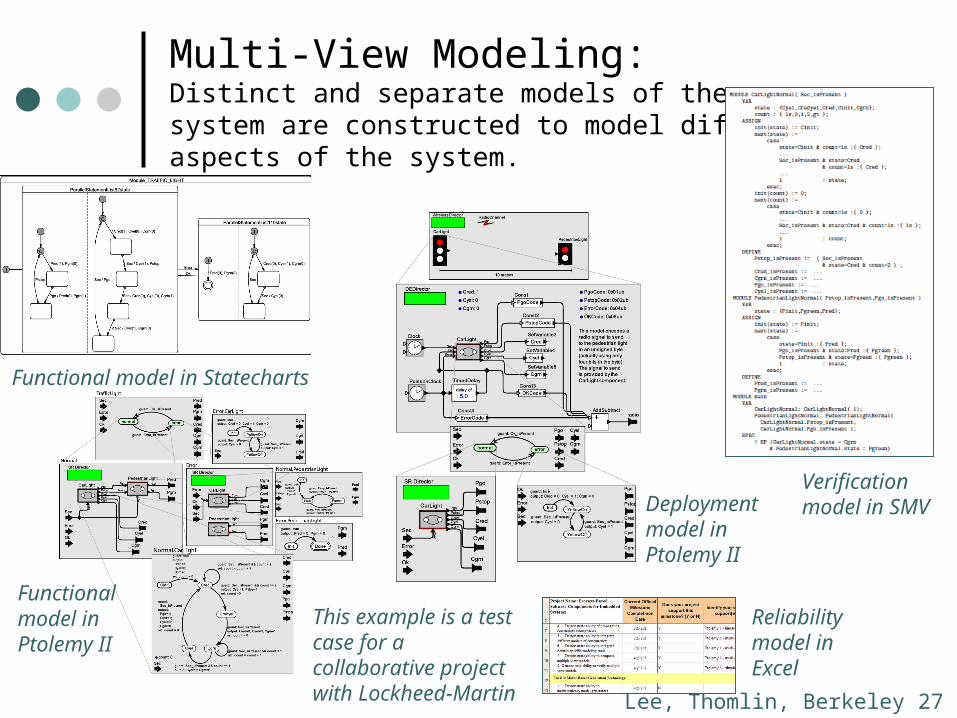
Multi-View Modeling:Distinct and separate models of the same system are constructed to model different aspects of the system.
Functional model in Statecharts
Functional model in Ptolemy II
Deployment model in Ptolemy II
Verification model in SMV
Reliability model in Excel
This example is a test case for a collaborative project with Lockheed-Martin

Lee, Thomlin, Berkeley 28
“Model Engineering” Project
Funding from Army Research Office, Air Force Research Office, Bosch, Lockheed-Martin.
Staffing: Edward A. Lee (UCB PI) Christopher Brooks (Technical staff) Teale Fristoe (Technical staff) Chihong (Partrick) Cheng (National Taiwan University,
Taipei/Berkeley exchange student) Thomas Huining Feng (UCB grad student) Jackie Mankit Leung (UCB grad student) Eleftherios Matisikoudis (UCB grad student)
Lee, Thomlin, Berkeley 29
Some of the CPS Research in Chess
Foundations: Timed computational semantics.
Bottom up: Embedded processors (PRET).
Top down: Distributed real-time systems (PTIDES).
Holistic: Scalable model-based design.
Applications: Air traffic control.

FACET, NASA Ames

Lee, Thomlin, Berkeley 31
Oakland Center
FACET, NASA Ames

Lee, Thomlin, Berkeley 32
1. Automated Separation Assurance
2.5 miles
1000 ft
(250 ft radius near airports)

Lee, Thomlin, Berkeley 3310/1/2008 HSL Group Meeting 33
Hybrid Systems Approach
Holding Pattern
Hold Speed
Increase Speed
Decrease Speed
DetourShortcut
Vector for Spacing
Vector for Spacing

Lee, Thomlin, Berkeley 3410/1/2008 HSL Group Meeting 34
Planning Agents
2. Mixed Initiative Control
Strategic Planning
Tactical Planning
Planning Horizon States Costs/Goals Outputs
Hours Aggregate Over Sector
Inflow/Outflow Management
Costs & Goals For Tactical Planner
Planning Horizon States Costs/Goals Outputs
Minutes Aircraft Dynamics
Set By Strategic Planner
Aircraft Vectoring Commands
Human
Automation
Lee, Thomlin, Berkeley 35
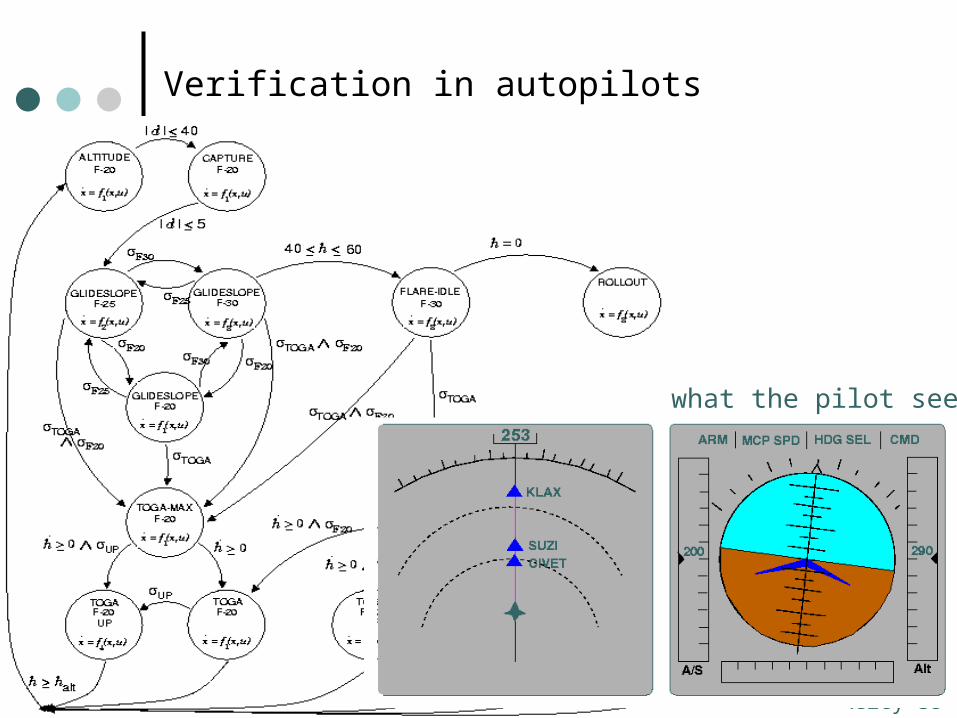
Verification in autopilots
what the pilot sees

Lee, Thomlin, Berkeley 36
3. Super-dense airspaces

Lee, Thomlin, Berkeley 37
NY Center
31
22
La Guardia
Kennedy
Newark
Teterborough
13’s
22’s
Priority over Kennedyearly morning (departures)
22’s
29’s
4
13
31’s4’s
19
1
24
6
16 – 4 = 12 possible configs

Lee, Thomlin, Berkeley 38
Research as a Business
Our Business Model:
Maximize the impact of our work, and the rest follows

Lee, Thomlin, Berkeley 39
Chess Industrial Partnerships
Close interaction between academic research and industrial experience, often involving frequent deep technical interactions.
Facilitate the creation and transfer of modern, "new economy" software technology methods and tools to "old economy" market sectors.
Focus on industries where embedded software plays a central role, such as: aerospace automotive Instrumentation, test, and measurement

Lee, Thomlin, Berkeley 40
Options for Funding Research
Gifts Quasi-gifts (CADCAM, BEECSA, ...) Center memberships Contracts
Center memberships have proved far more effective than the alternatives.

Lee, Thomlin, Berkeley 41
Intellectual Property in CHESS
Commitment is:
Software will be open source Patents will be rare
Lee, Thomlin, Berkeley 42
IP Principles
Address researcher concerns Maximize the impact of the work Freedom to publish papers Freedom to release open source software No obligation to patent results Ability to patent results Minimal obstacles to commercialization
Address company concerns: Value for the money Protection from being “locked out” of research results Viable VIF agreements Desire to “expense” contributions

Lee, Thomlin, Berkeley 43
Intellectual Property Rights From Appendix C of the CHESS Agreement
“The objective of CHESS is to maximize the impact of its research. To achieve this, CHESS will maintain an open atmosphere that encourages early and frequent publication and other public dissemination of research results. Software will primarily be released using an open source license such as the Berkeley Software Distribution (BSD) License. Selected software, such as those subject to third party obligations, may be released under different licenses.”
“Patents are expected to be rare. . .”

Lee, Thomlin, Berkeley 44
The BSD License: Used for most software
Copyright (c) YEAR The Regents of the University of California.
All rights reserved.
Permission is hereby granted, without written agreement and without license or royalty fees, to use, copy, modify, and distribute this software and its documentation for any purpose, provided that the above copyright notice and the following two paragraphs appear in all copies of this software.
IN NO EVENT SHALL THE UNIVERSITY OF CALIFORNIA BE LIABLE TO ANY PARTY FOR DIRECT, INDIRECT, SPECIAL, INCIDENTAL, OR CONSEQUENTIAL DAMAGES ARISING OUT OF THE USE OF THIS SOFTWARE AND ITS DOCUMENTATION, EVEN IF THE UNIVERSITY OF CALIFORNIA HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
THE UNIVERSITY OF CALIFORNIA SPECIFICALLY DISCLAIMS ANY WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. THE SOFTWARE PROVIDED HEREUNDER IS ON AN "AS IS" BASIS, AND THE UNIVERSITY OF CALIFORNIA HAS NO OBLIGATION TO PROVIDE MAINTENANCE, SUPPORT, UPDATES, ENHANCEMENTS, OR MODIFICATIONS.

Lee, Thomlin, Berkeley 45
Spinoffs of Ptolemy Software
Agilent ADS: Leading design software for analog, RF, and mixed-signal design, primarily targeted to wireless systems development, based on Ptolemy Classic.
Cal actor design language, adopted by MPEG for specification of coding standards, and used by Thales, Xilinx, and others for FPGA and multicore software design.
iSencia Passerelle is based on Ptolemy II and is used to prepare experiments for the Soleil synchrotron.
Kepler: A System for Scientific Workflows, is a cross-project collaboration to develop open source tools for Scientific Workflows and is based on the Ptolemy II.
Mirabilis Design VisualSim, built on top of Ptolemy II, does performance analysis and system architecture, rapid system modeling and hardware/software tradeoff analysis.
ML Design Technologies’ MLDesigner, is a platform that leverages Ptolemy Classic for modeling and analyzing the architecture, function and performance of high level system.
And more: Boeing, Bosch, Cadence, Lockheed Martin, Research in Motion, Thales (ArrayOL), VPI Systems, White Eagle Technologies, etc.

Lee, Thomlin, Berkeley 46
CHESS Industrial Membership Levels
Affiliate> $75k/year
Affiliate membership includes the following benefits: • Invitation to periodic reviews of CHESS.• Access to selected internal CHESS websites.• Access to publications, reports and presentations by CHESS researchers.• Access to students and faculty in CHESS.• An annual research report of the activities of CHESS.• Advance notice of intellectual property created by CHESS.• Intellectual property access as defined in the agreement. (See Appendix C(1))
Small or Minority-Owned Business> $10k/year
All of the benefits of an Affiliate
Partner> $150k/year
All of the benefits of an Affiliate, plus the following:• Opportunity to place visitors, as Visiting Industrial Fellows (VIF) at the University.• Selected early access to software developed by CHESS.
Premium Partner> $300k/year
All of the benefits of a Partner, plus the following:• Intellectual property access as defined in the agreement. • Upon request, an annual private research review meeting at the University or at a mutually agreeable site.

Lee, Thomlin, Berkeley 47
Conclusion
Chess has a rich portfolio of research projects and an established track record of working effectively with industry to maximize the impact of the work.