particle filters for mobile robot localization 11/24/2006 aliakbar gorji roborics instructor: dr....
Post on 21-Dec-2015
215 views
TRANSCRIPT
Particle Filters for Mobile Robot Localization
11/24/2006
Aliakbar Gorji
Roborics
Instructor: Dr. ShiriAmirkabir University of Technology
Preface• State Space models• Bayesian Filters for State
estimation• Particle Filters• Mobile Robot Localization• Particle Filters for real time
localization• Conclusion

Nonlinear State Space Systems
• A General Model:
t
t
wtxgy
vtuxfx
,
,,.
White noise with
covariance R
White noise with
covariance Q
State’s Dynamic
Output Observations
Nonlinear State Space Systems
• Ultimate Goal in modeling:– Inference (State Estimation)– Learning (Parameter Estimation)
• Inference designates to the estimation of states with regard to output observations and known parameters. ),|(
:1:1 ttt yxp Parameters of f and g

Various inference approaches
Online System Identification
• First Case: f and g are known.
• Second Case: There is not any information about the system’s dynamic:– Proposing parametric structures for f
and g.
Classic (Linear or Nonlinear)
Intelligent (Neural, RBF
or Fuzzy)

What do we seek?• We consider case 1,that is f and g are
known.• There is not any parametric structure ,
therefore, parameter estimation is eliminated.
• We are seeking the estimation of states (Latent Variables) based on observations (Sensor Measurements)
Bayesian Filters
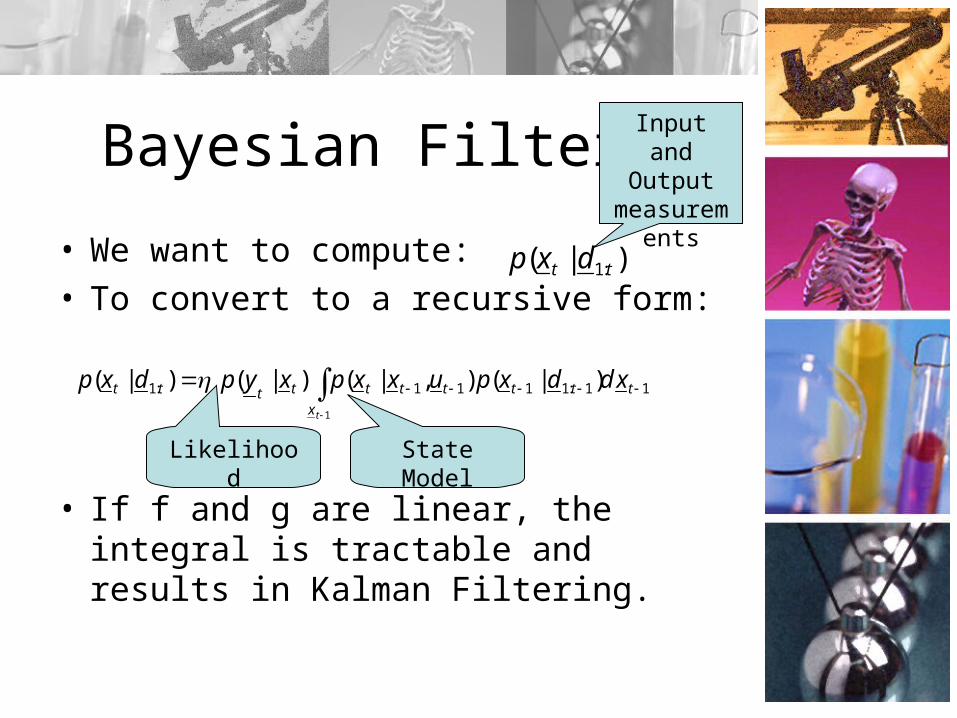
• We want to compute:• To convert to a recursive form:
• If f and g are linear, the integral is tractable and results in Kalman Filtering.
)|( :1 tt dxp
Input and Output
measurements
11:1111:1
1
)|(),|()|()|(
t
x
ttttttttt xddxpuxxpxypdxpt
State ModelLikelihood
Bayesian Filters
• If f and g are nonlinear, the density distributions are not in Gaussian form.
• Extended Kalman filter: by linearization about nominal point, f and g convert to linear forms.
• EKF is not applicable in many real applications such as Target Tracking.
• Particle filters prove a strong tool to model the Non-Gaussian distributions.

What is Particle Filter?• It is the online version of Monte
Carlo algorithms.• Its idea is to estimate a distribution
function by sampling.
N
i
itt x
Ndxp
1:1 )(
1)|(
Particle Filter
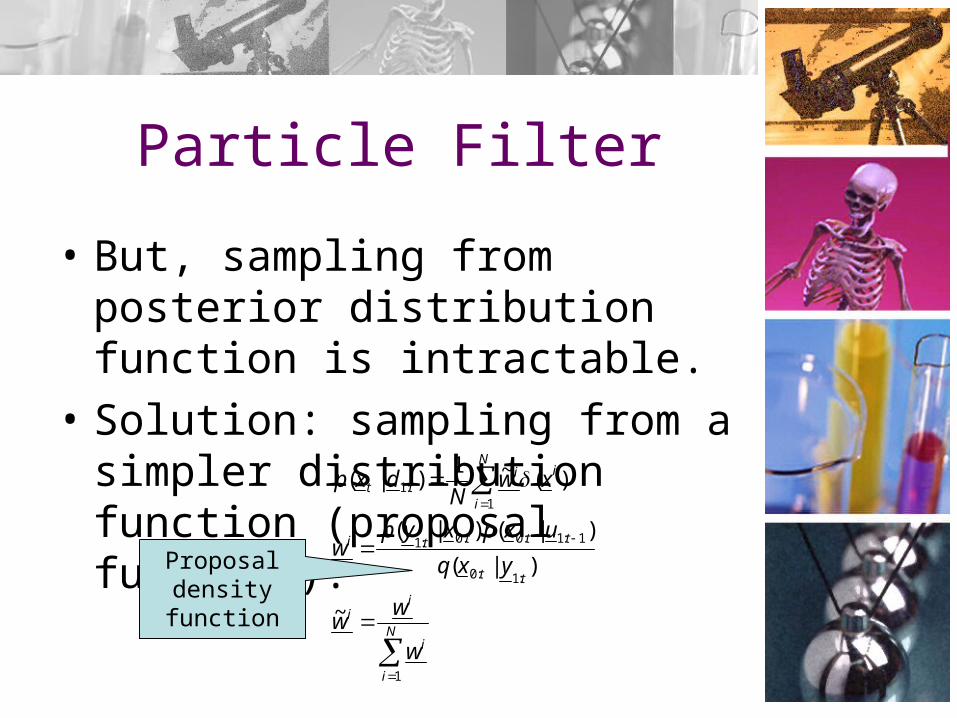
• But, sampling from posterior distribution function is intractable.
• Solution: sampling from a simpler distribution function (proposal function).
Proposal density function
N
i
i
ii
tt
tttti
N
i
iitt
w
ww
yxq
uxpxypw
xwN
dxp
1
:1:0
1:1:0:0:1
1:1
~
)|(
)|()|(
)(~1)|(

What did change?• Sampling is conducted via proposal
function rather than posterior density function.
• Question: How can one determine proposal density function.
• There are two choices.
)|(),|( 1:11 ttttt xypuxxq ),|(),|( 1:111:11 tttttt uxxpuxxq
Good accuracy but
hard to implement
Suitable accuracy and easy to implement
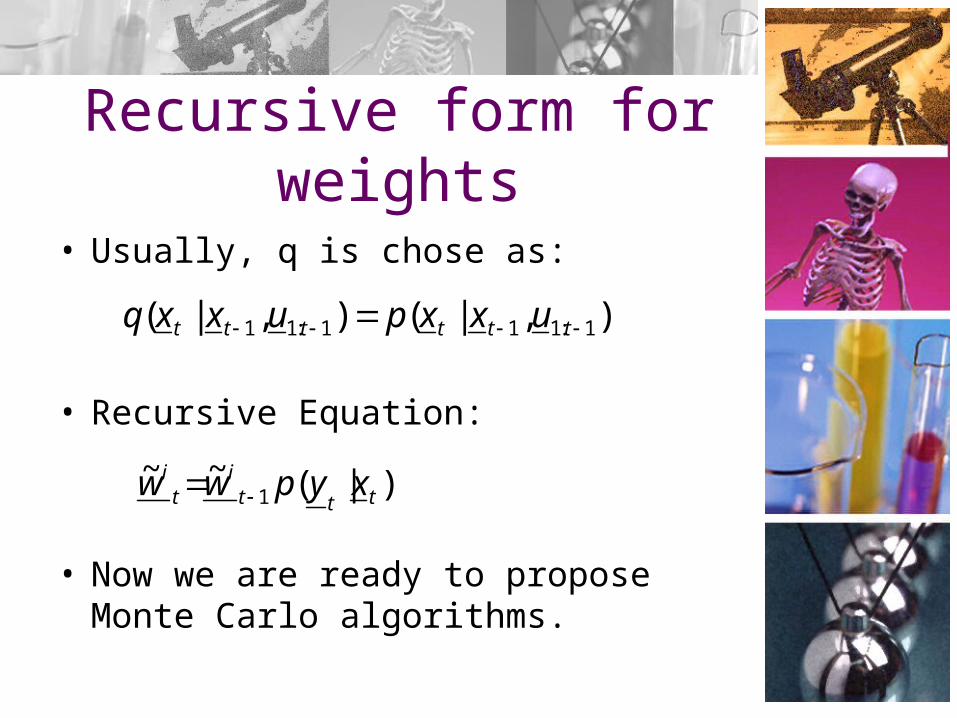
Recursive form for weights
• Usually, q is chose as:
• Recursive Equation:
• Now we are ready to propose Monte Carlo algorithms.
),|(),|( 1:111:11 tttttt uxxpuxxq
)|(~~1 ttt
iti xypww
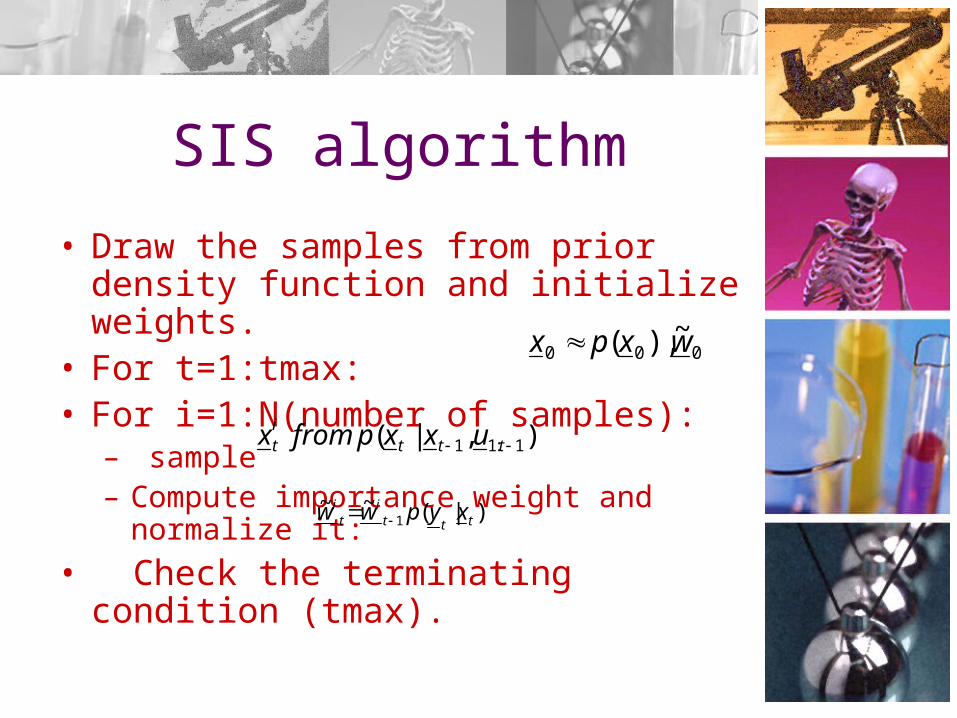
SIS algorithm
• Draw the samples from prior density function and initialize weights.
• For t=1:tmax:• For i=1:N(number of samples):
– sample– Compute importance weight and
normalize it:
• Check the terminating condition (tmax).
000~),( wxpx
),|( 1:11 tttit uxxpfromx
)|(~~1 ttt
iti xypww

Degeneracy Problem and SIR algorithm
• During the implementation of SIS algorithm the weight of all samples approach zero and only one sample has the weight 1.
• Solution: in each iteration, the weights with higher value are multiplied.
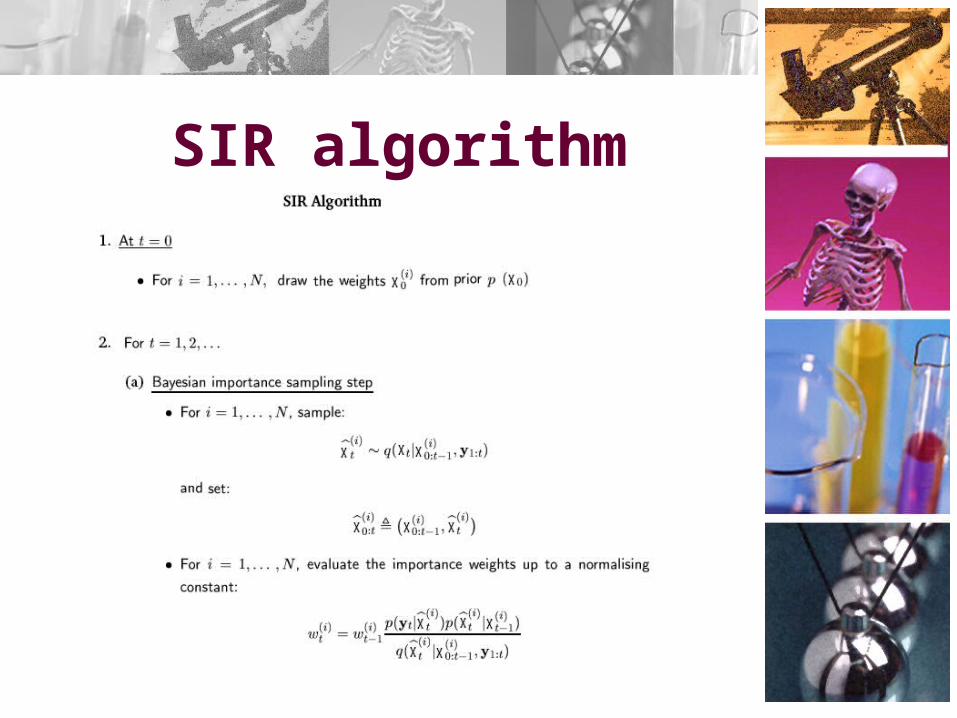
SIR algorithm

SIR algorithm
N
i
it
eff
wN
1
2)~(
1

Some Modifications
• Kernal methods: considering a Gaussian distribution for each sample.
KERNAL method and Hybrid SIR
• To adjust the parameters of the above distribution, KALMAN Filter method is combined with SIR algorithm.
• The stages of Hybrid SIR algorithm:– KALMAN Filter measurement update.
– SIS algorithm to choose the new samples and computing importance weights.
– Resampling stage to avoid degeneracy problem.
),ˆ( it
it
it pxNx
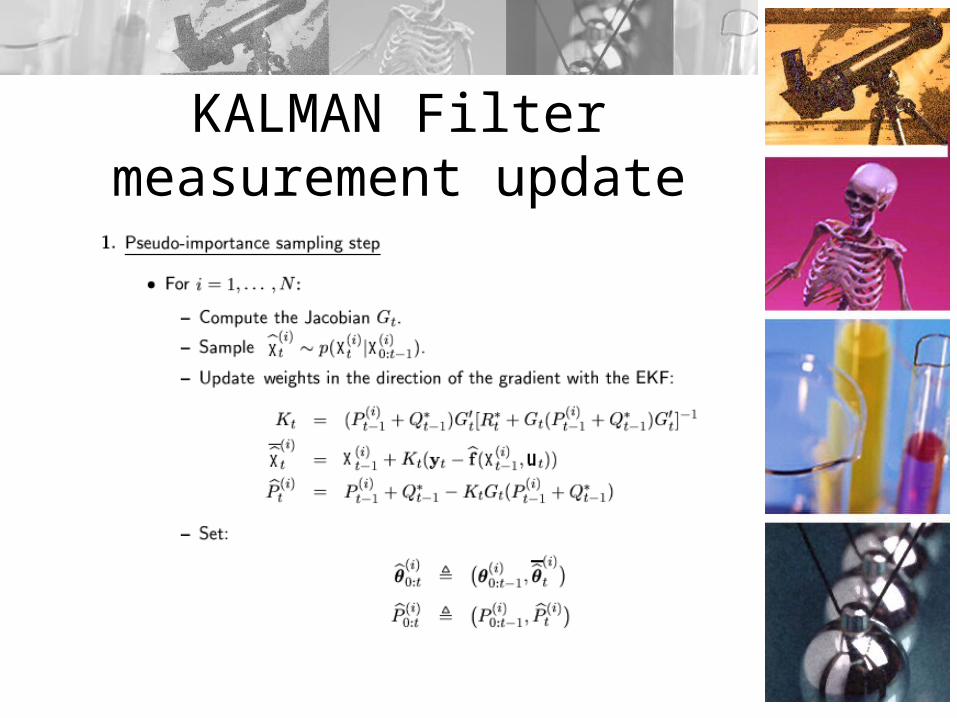
KALMAN Filter measurement update
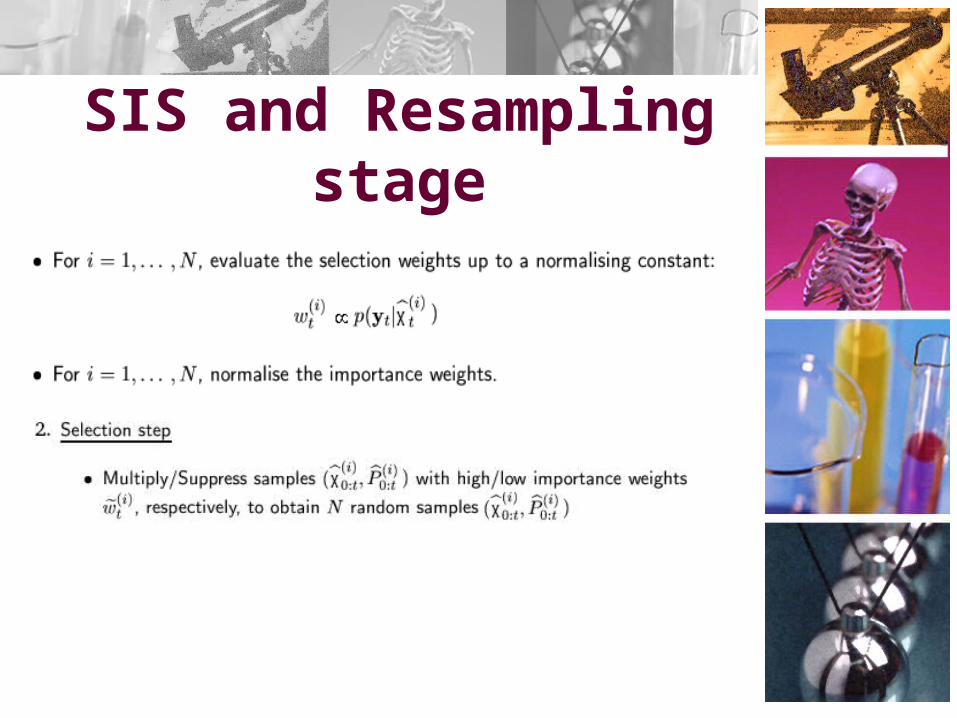
SIS and Resampling stage
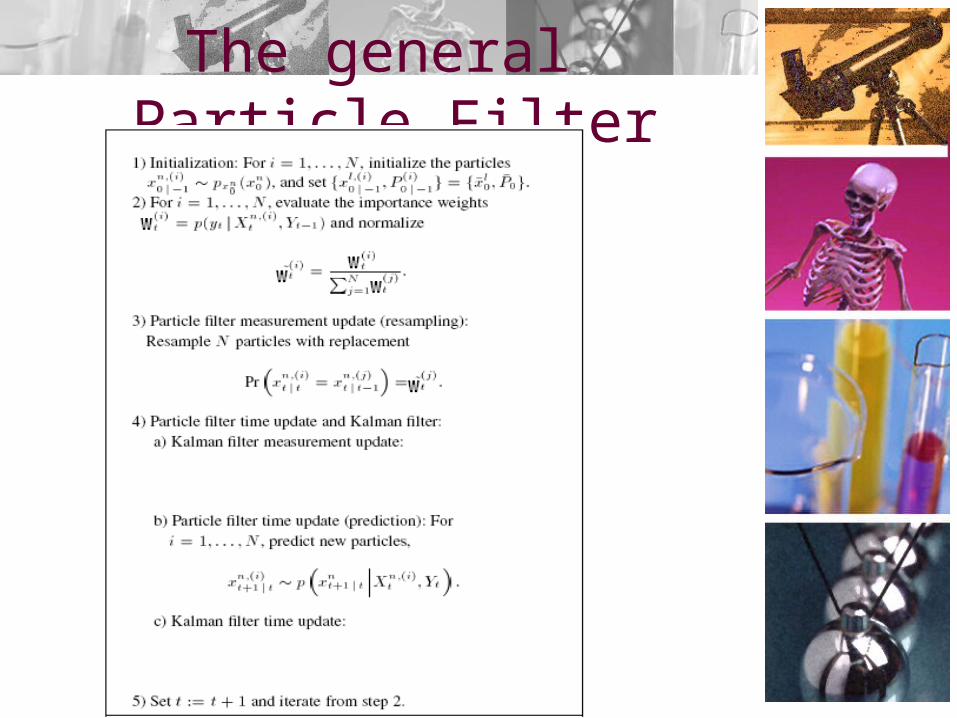
The general Particle Filter

The other Particle Filter Algorithms
• Sequential Monte Carlo : mixing Particle Filters with common Monte Carlo methods [ De.Freits PhD thesis, University of Cambridge, 1999].
• Marginalized Particle Filters (Rao-Blackwellized Particle Filters): dividing states to linear and nonlinear ones. For linear states KALMAN Filter and for nonlinear ones Particle Filter is applied.

Applications
• Navigation and Positioning.
• Multiple Target Tracking and Data Fusion.
• Financial Forecasting.
• Computer Vision.
• Wireless Communication and Blind Equalization problems.

Mobile Robots Localization
• Predicting robot’s position relative to its environment map.
• There are three types of positioning:– Position Tracking: the initial position of robot is
known.– Global Positioning: the initial conditions are not
given (initial values of states are not determined).
– Multiple Robot Positioning.• Particle Filters provide satisfactory results
for all of above issues.

Particle Filters for Mobile Robot Localization
• The following points should be considered:– As the point of State Space Models, f is
motion dynamic and g is Sensor characteristic and both are supposed to be known.
– The following distribution are designated as: ),|( 11 ttt uxxp )|( tt
xypMotion Model
Perceptual Likelihood

How can we determine each distribution?
• Motion model is determined by the behaviour of values measured by odometry.
• Perceptual Likelihood model is dependent to the sensor used for measurement, such as Sonar, Camera or Laser.
• Usually, one sensor is used as target (the one with highest accuracy) and the others’ data are modified by the mentioned sensor.
• After determining the structure of each distribution, general Particle Filter is applied for tracking.
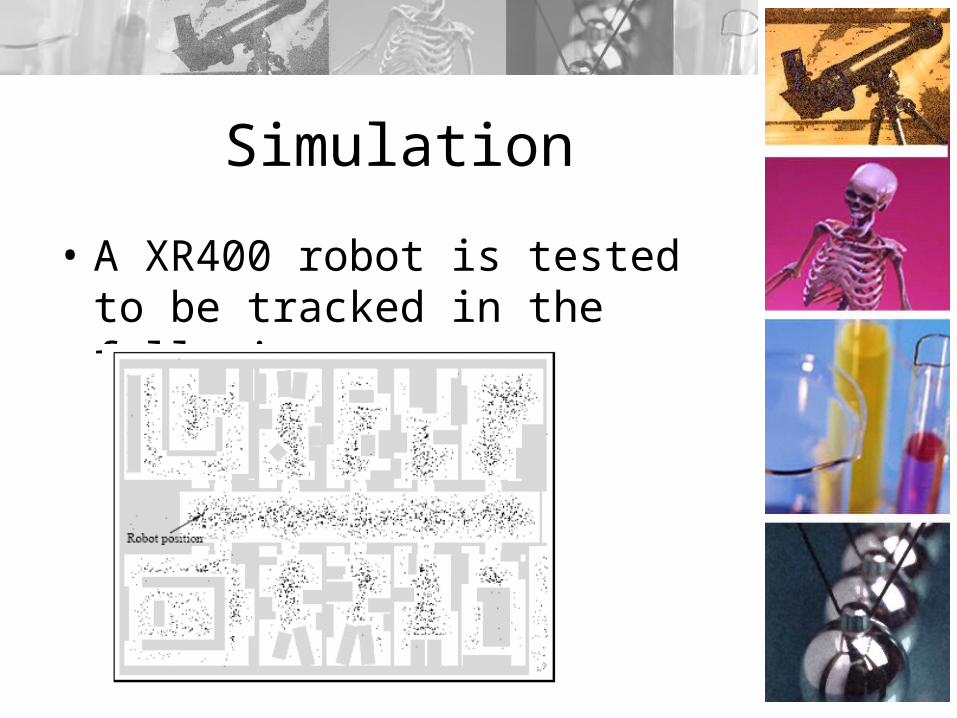
Simulation
• A XR400 robot is tested to be tracked in the following map.
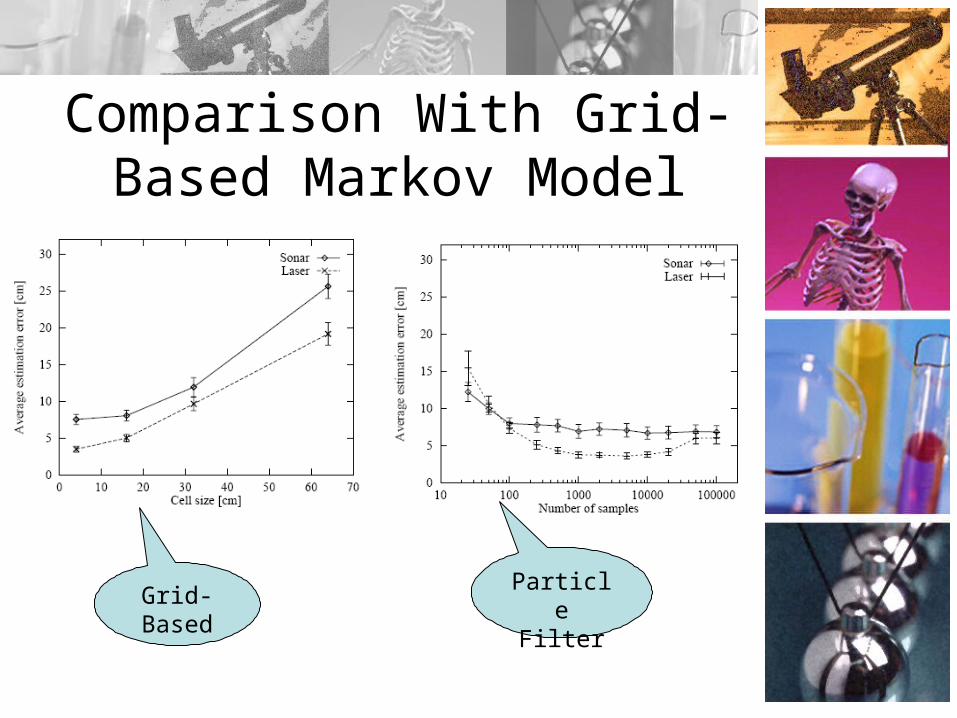
Comparison With Grid-Based Markov Model
Grid-Based
Particle Filter
Comparison With Grid-Based Markov Model
• A Particle Filter with 1000 to 5000 samples had a similar error compared with a Grid-Based method with resolution 4cm.
• The mentioned Grid-Based is not possible to apply in real-time mode but a Particle Filter with 5000 samples is easily implemented in real-time condition.
Multi-Robot Particle Filters
• A team of robots want to localize each other.
• A difficult problem: the states of each robot are dependent to the other robots’ states.
• Solution: the following dependency factor is defined:
•
robottwobetweencedisthed
robotjthsensenotdorobotithifr jit tan
0,

Multi-Robot Particle Filters
• Now, the posterior distribution function is determined as:
• The recursive equation is derived as:
• The above equation can be implemented by Particle Filter.
)|()|(1
it
N
i
ittt DXpDXp
i
x
iijiijjjjj
t
t
tttttttttxddxprxxpdxpdxp
1
1
1:11111:11:1)|(),|()|()|( ,

Conclusion
• Particle Filters can estimate the wide variety of Non-Gaussian distribution functions.
• In comparison with KALMAN Filters, Particle Filters have a more accurate result relative to KALMAN Filters.
• Particle Filters are easily implemented and in comparison with Grid-Based methods can provide better results for mobile robot localization.

Some References • Dieter Fox, Particle Filters for Mobile Robot
Localization.• Jo.ao F. G. de Freitas, Bayesian Methods for Neural
Networks, PhD thesis, University of Cambridge.• Website of Dr. Arnaud Doucet,
www.cs.ubc.ca/~arnaud/ .• Pierre Del Moral, Arnaud Doucet, ‘Sequential Monte
Carlo Samplers’, J. R. Statist. Soc. B (2006).• Huosheng Hu and John Q. Gan, ‘Sensors and Data
Fusion Algorithms in Mobile Robotics’, Technical Report: CSM-422, University of Essex.
Best Wishes
The End