politecnico di milano - politesi.polimi.it · il recupero del sincronismo dell’istante di...
TRANSCRIPT

POLITECNICO DI MILANO
Scuola di Ingegneria Industriale e dell’Informazione
Corso di Laurea Magistrale in Ingegneria delle Telecomunicazioni
OTTIMIZZAZIONE DEL FILTRO DI
POST-DETECTION NELLA SINCRONIZZAZIONE
DELL’ISTANTE DI CAMPIONAMENTO BASATO
SU RIVELAZIONE A QUADRATORE IN
RICEVITORI NUMERICI
Relatore: Prof. Arnaldo SPALVIERI
Tesi di Laurea di:
Federica Edvige SCARDONI, matricola 782960
Anno Accademico 2012-2013

Sommario
Il recupero del sincronismo dell’istante di campionamento e un aspetto
fondamentale nello studio e nella progettazione dei sistemi di comunicazione
digitali, ampiamente trattato in letteratura. In questo ambito un ruolo de-
terminante e giocato dal rumore di fase inevitabilmente presente nel sistema,
il quale deve essere stimato e compensato dall’algoritmo per il recupero del
sincronismo di simbolo.
Lo scopo di questa tesi consiste nell’analizzare le componenti di rumore
di fase tempo-variante a valle del TED del sincronizzatore e, in base ad esse,
progettare il filtro di post-detection opportuno da implementare nel sincro-
nizzatore stesso.
Particolare attenzione verra posta al termine di rumore noto come self-noise,
in quanto in letteratura e assente una trattazione completa a tal riguardo.
Verra progettato il post-filtro ottimo e, a partire da esso, saranno proposte
soluzioni sub-ottime meno onerose dal punto di vista realizzativo.
L’analisi svolta verra validata tramite confronto con i risultati ottenuti dal-
le simulazioni eseguite, prendendo in esame i sincronizzatori feedforward di
Oerder e Meyr e di Serpedin, cosı come quello retroazionato di Gardner.
I

Indice
Sommario I
Elenco delle figure V
Elenco delle tabelle IX
Acronimi X
Introduzione 1
1 Recupero del sincronismo di simbolo 5
1.1 Sincronizzatori di simbolo in ricevitori numerici . . . . . . . . 5
1.1.1 Classificazione dei sincronizzatori . . . . . . . . . . . . 7
1.1.2 Sincronizzatore di Oerder e Meyr . . . . . . . . . . . . 9
1.1.3 Sincronizzatore di Gardner . . . . . . . . . . . . . . . . 10
1.1.4 Sincronizzatore di Serpedin . . . . . . . . . . . . . . . 11
1.2 Rumore dipendente dai dati: self-noise . . . . . . . . . . . . . 12
1.3 Pre-filtro ottimizzato . . . . . . . . . . . . . . . . . . . . . . . 13
2 Analisi del self-noise nel sincronizzatore di simbolo
di Oerder&Meyr 16
2.1 Scenario e modello . . . . . . . . . . . . . . . . . . . . . . . . 16
2.1.1 Sincronizzante . . . . . . . . . . . . . . . . . . . . . . . 22
2.2 Densita spettrale di potenza ciclostazionaria del rumore di fase 23
2.2.1 Densita spettrale di potenza media del rumore di fase . 26
2.3 Approssimazione della DSP del rumore di fase . . . . . . . . . 28
2.3.1 Approssimazione del contributo N ×N . . . . . . . . . 28
II

2.3.2 Approssimazione del contributo S ×N . . . . . . . . . 29
2.3.3 Approssimazione del contributo S × S . . . . . . . . . 31
3 Progettazione del post-filtro nel sincronizzatore di simbolo
di Oerder&Meyr 35
3.1 Rumore di fase tempo-variante . . . . . . . . . . . . . . . . . . 35
3.2 Post-filtro ottimo Hottimo(ej2πfT ) . . . . . . . . . . . . . . . . . 37
3.2.1 Valutazioni su post-filtro ottimo e sub-ottimo . . . . . 41
3.3 Ottimizzazione del post-filtro a singola e doppia media mobile 42
3.3.1 Ottimizzazione tramite uguaglianza tra bande di rumore 43
3.3.2 Ottimizzazione tramite ricerca empirica . . . . . . . . . 44
3.3.3 Effetti dell’ottimizzazione . . . . . . . . . . . . . . . . 46
4 Altri sincronizzatori dell’istante di campionamento 52
4.1 Sincronizzatore di Serpedin . . . . . . . . . . . . . . . . . . . 52
4.2 Sincronizzatore di Gardner . . . . . . . . . . . . . . . . . . . . 54
4.2.1 Autocorrelazione e densita spettrale di potenza del ru-
more di fase . . . . . . . . . . . . . . . . . . . . . . . . 55
4.2.2 Post-filtro . . . . . . . . . . . . . . . . . . . . . . . . . 58
5 Simulazioni e risultati 64
5.1 Sincronizzatore di Oerder & Meyr e sincronizzatore di Serpedin 64
5.1.1 Densita spettrale di potenza del rumore di fase . . . . . 64
5.1.2 Prestazioni . . . . . . . . . . . . . . . . . . . . . . . . 66
5.2 Sincronizzatore di Gardner . . . . . . . . . . . . . . . . . . . . 75
5.2.1 Densita spettrale di potenza del rumore di fase . . . . . 75
5.2.2 Prestazioni in presenza di rumore di fase tempo-variante 78
6 Conclusioni e possibili sviluppi futuri 80
A Sincronizzante nel sincronizzatore di Oerder e Meyr 82
B Autocorrelazione e densita spettrale di potenza del rumore
di fase nel sincronizzatore di Oerder e Meyr 85
B.1 Definizioni utili . . . . . . . . . . . . . . . . . . . . . . . . . . 85
B.2 Autocorrelazioni e cross-correlazioni . . . . . . . . . . . . . . . 87
III

B.3 Autocorrelazione Rz1z1(mT ; ǫ) . . . . . . . . . . . . . . . . . . 88
B.4 Altre autocorrelazioni e cross-correlazioni Rzizj (mT ; ǫ) . . . . 93
B.5 Approssimazione del contributo SxS . . . . . . . . . . . . . . . 95
C Post-filtro ottimo per il sincronizzatore di Oerder e Meyr 98
D Autocorrelazione e densita spettrale di potenza del rumore
di fase SxS nel sincronizzatore di Gardner 100
D.1 Autocorrelazione e densita spettrale di potenza . . . . . . . . 100
D.2 Approssimazione della densita spettrale di potenza SxS . . . . 103
E Post-filtro ottimo per il sincronizzatore di Gardner 104
Bibliografia 107
IV
Elenco delle figure
1.1 Diagramma ad occhio a valle del filtro in ricezione. Cascata
di filtri in trasmissione e ricezione del tipo coseno rialzato, con
fattore di roll-off minimo. . . . . . . . . . . . . . . . . . . . . . 6
1.2 Configurazione non retroazionata di stima e correzione. . . . . 8
1.3 Configurazione retroazionata di stima e correzione. . . . . . . 9
1.4 Schema a blocchi del sincronizzatore di simbolo di O&M. . . . 10
1.5 Schema a blocchi del sincronizzatore di simbolo di Gardner. . 11
1.6 Schema a blocchi del sincronizzatore di simbolo di Serpedin. . 11
1.7 Risposta in frequenza del filtro in trasmissione G(f), radice
di coseno rialzato con roll-off α pari a 0.25, e del pre-filtro
ottimizzato P(f). . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.1 Schema a blocchi del sistema di comunicazione studiato e suo
modello equivalente. . . . . . . . . . . . . . . . . . . . . . . . 17
2.2 Schema a blocchi del TED costruito per il modello equivalente. 19
2.3 Rappresentazione vettoriale. . . . . . . . . . . . . . . . . . . . 21
2.4 Schema a blocchi del TED e dell’estrazione del rumore di fase
nel modello equivalente. . . . . . . . . . . . . . . . . . . . . . 22
2.5 Densita spettrale di potenza del self-noise per diversi valori di
ǫ; 4−QAM, roll-off α = 0.25 e pre-filtro MF. . . . . . . . . . 25
2.6 Densita spettrale di potenza del self-noise mediata su ǫ; 4 −QAM, roll-off α = 0.25 e pre-filtri MF e PO. . . . . . . . . . . 27
2.7 Densita spettrale di potenza media e sua approssimazione per
il contributo NxN; 4−QAM, roll-off α = 0.25 e SNR = 0 dB. 29
V
2.8 Densita spettrale di potenza al variare di ǫ e media per il
contributo SxN e relativa approssimazione; 4−QAM, roll-off
α = 0.25 e SNR = 0 dB. . . . . . . . . . . . . . . . . . . . . . 30
2.9 Varianza σ2ψ in funzione del valore di SNR: contributi NxN,
SxN e SxS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.10 Densita spettrale di potenza media e sua approssimazione per
il contributo SxS; 4−QAM, roll-off α = 0.25 e pre-filtri MF e
PO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.11 Densita spettrale di potenza media e sua approssimazione per
il contributo SxS, per diversi valori di roll-off α; 4 − QAM e
pre-filtro MF. . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.12 Valore di βSxS al variare del roll-off α; {4, 256}−QAM e pre-
filtri MF e PO. . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.1 Spettro Lorentziano e sua approssimazione come Sθ(ej2πfT ),
con γ2 pari a 4 · 10−6 . . . . . . . . . . . . . . . . . . . . . . . 37
3.2 Risposta in frequenza del post-filtro ottimo, realizzato per
SNR = {20,50} dB; 4 − QAM, roll-off α = 0.25 e pre-filtro
MF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.3 Confronto tra post-filtro ottimo con pre-filtro MF e pre-filtro
PO, realizzati per SNR = {20,50} dB; 4 − QAM e roll-off
α = 0.25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.4 Schema a blocchi del filtraggio a singola media mobile imple-
mentato in modo ricorsivo. . . . . . . . . . . . . . . . . . . . . 43
3.5 Ottimizzazione empirica del post-filtro a doppia media mobile
con pre-filtri MF e PO; 4 − QAM, roll-off α = 0.25 e SNR =
50 dB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.6 Esempio di ottimizzazione dei post-filtri a singola e doppia
MA, tramite le due tecniche discusse; 4 − QAM, roll-off α =
0.25 e pre-filtro MF. . . . . . . . . . . . . . . . . . . . . . . . 46
4.1 Schema a blocchi del sincronizzatore di simbolo di Serpedin. . 53
4.2 Schema a blocchi del sincronizzatore di simbolo di Gardner. . 54
4.3 Densita spettrale di potenza del rumore di fase SxS, per diversi
valori di roll-off α; 4−QAM e pre-filtro MF. . . . . . . . . . . 57
VI
4.4 Valore di βS×S,GA al variare del roll-off α; {4, 256} − QAM e
pre-filtro MF. . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.5 Schema a blocchi dell’implementazione di LPO(f) nel sincro-
nizzatore di Gardner. . . . . . . . . . . . . . . . . . . . . . . 60
4.6 Schema a blocchi dell’implementazione di LMF (f) nel sincro-
nizzatore di Gardner. . . . . . . . . . . . . . . . . . . . . . . 62
4.7 Post-filtri ottimi per pre-filtri MF e PO, per diversi SNR; 4−QAM e roll-off α = 0.25. . . . . . . . . . . . . . . . . . . . . . 63
5.1 Densita spettrale di potenza del self-noise Sψ,S×S(ej2πfT ; ǫ)
per il sincronizzatore di Oerder e Meyr, per diversi valori del
ritardo ǫ; 4−QAM, roll-off α = 0.25 e pre-filtro MF. . . . . . 65
5.2 Densita spettrale di potenza del self-noise media Sψ,S×S(ej2πfT )
per il sincronizzatore di Oerder e Meyr; {4, 256} − QAM,
roll-off α = 0.25 e pre-filtri MF e PO. . . . . . . . . . . . . . . 66
5.3 Prestazioni dei sincronizzatori di O&M e di Serpedin con ru-
more di fase tempo-invariante, pre-filtro MF, post-filtro a sin-
gola media mobile di varie lunghezze temporali D; 4 − QAM
e roll-off α = 0.25. . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.4 Prestazioni dei sincronizzatore di O&M e di Serpedin con ru-
more di fase tempo-invariante, pre-filtro PO, post-filtro a sin-
gola media mobile di varie lunghezze temporali D; 4 − QAM
e roll-off α = 0.25. . . . . . . . . . . . . . . . . . . . . . . . . . 69
5.5 Prestazioni dei sincronizzatori di O&M e di Serpedin con ru-
more di fase tempo-invariante, pre-filtri MF e PO, post-filtro
a doppia media mobile, ciascuna di lunghezza temporale D;
4−QAM e roll-off α = 0.25. . . . . . . . . . . . . . . . . . . . 70
5.6 Prestazioni dei sincronizzatori di O&M e di Serpedin con ru-
more di fase tempo-variante, pre-filtro MF, post-filtro otti-
mo e post-filtri a singola e doppia media mobile ottimizzati;
4−QAM e roll-off α = 0.25. . . . . . . . . . . . . . . . . . . . 71
VII

5.7 Prestazioni dei sincronizzatori di O&M e di Serpedin con ru-
more di fase tempo-variante, pre-filtro PO, post-filtro otti-
mo e post-filtri a singola e doppia media mobile ottimizzati;
4−QAM e roll-off α = 0.25. . . . . . . . . . . . . . . . . . . . 72
5.8 Prestazioni del sincronizzatore di O&M con rumore di fase
tempo-variante, pre-filtri MF e PO, post-filtro ottimo e post-
filtri a singola e doppia media mobile ottimizzati empiricamen-
te; 256−QAM e roll-off α = 0.25. . . . . . . . . . . . . . . . . 74
5.9 Densita spettrale di potenza del self-noise Sψ,S×S,GA(ej2πfT )
per il sincronizzatore di Gardner, per diversi valori di roll-off
α; 4−QAM e pre-filtro MF. . . . . . . . . . . . . . . . . . . . 76
5.10 Densita spettrale di potenza Sψ,GA(ej2πfT ) per il sincronizza-
tore di Gardner, con pre-filtro MF; {4, 256} −QAM e roll-off
α = 0.25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
5.11 Densita spettrale di potenza Sψ,GA(ej2πfT ) per il sincronizza-
tore di Gardner, con pre-filtri MF e PO, per diversi valori di
SNR; 4−QAM e roll-off α = 0.25. . . . . . . . . . . . . . . . 77
5.12 Prestazioni del sincronizzatore di Gardner con rumore di fase
tempo-variante, pre-filtri MF e PO e post-filtri ottimi; {4, 256}−QAM e roll-off α = 0.25. . . . . . . . . . . . . . . . . . . . . . 79
VIII

Elenco delle tabelle
3.1 Confronto tra le prestazioni offerte dal post-filtro ottimo e
quelle offerte dal post-filtro a doppia media mobile ottimizza-
to; 4−QAM, roll-off α = 0.25 e pre-filtro MF. . . . . . . . . . 47
3.2 Confronto tra le prestazioni offerte dal post-filtro ottimo e
quelle offerte dal post-filtro a doppia media mobile ottimizza-
to; 4−QAM, roll-off α = 0.25 e pre-filtro PO. . . . . . . . . . 48
3.3 Confronto tra le prestazioni offerte dal post-filtro ottimo e
quelle offerte dal post-filtro a singola media mobile ottimizza-
to; 4−QAM, roll-off α = 0.25 e pre-filtro MF. . . . . . . . . . 48
3.4 Confronto tra le prestazioni offerte dal post-filtro ottimo e
quelle offerte dal post-filtro a singola media mobile ottimizza-
to; 4−QAM, roll-off α = 0.25 e pre-filtro PO. . . . . . . . . . 49
3.5 Confronto tra le prestazioni offerte dal post-filtro ottimo e
quelle offerte dai post-filtri a singola e doppia media mobile
ottimizzati; 256−QAM, roll-off α = 0.25 e pre-filtro MF. . . . 50
3.6 Confronto tra le prestazioni offerte dal post-filtro ottimo e
quelle offerte dai post-filtri a singola e doppia media mobile
ottimizzati; 256−QAM, roll-off α = 0.25 e pre-filtro PO. . . . 51
IX
Acronimi
ADC Analog to Digital Converter
AWGN Additive White Gaussian Noise
BPSK Binary Phase Shift Keying
DAC Digital to Analog Converter
DSP Densita Spettrale di Potenza
FIR Finite Impulse Response
ISI Interferenza Inter-Simbolica
MA Moving Average
MF Matched Filter
MSE Mean Square Error
OeM Oerder e Meyr
OSF Over-Sampling Factor
PLL Phase Lock Loop
PO Pre-filtro Ottimizzato
PSK Phase Shift Keying
QAM Quadrature Amplitude Modulation
SNR Signal to Noise Ratio
TED Timing Error Detector
X

Introduzione
Nei sistemi di comunicazione digitali e fondamentale che il ricevitore recu-
peri nel modo migliore possibile il sincronismo di simbolo, affinche la conver-
sione analogico-digitale avvenga negli istanti ottimali e le prestazioni dell’in-
tero sistema non subiscano degradazioni. In letteratura sono stati proposti
molteplici algoritmi per il recupero della sincronizzazione, ognuno con pecu-
liarita specifiche. In questa tesi saranno assunti come riferimento due tra i
principali schemi esistenti, rispetto ai quali si concentrera il lavoro effettua-
to: il sincronizzatore proposto da Oerder e Meyr [1] per il caso feedforward e
quello di Gardner [2] per la variante feedback ; anche l’algoritmo di Serpedin
[3] verra analizzato, poiche si tratta di un’interessante combinazione dei due
precedenti.
Nei sistemi di comunicazione e inevitabile la presenza di rumore di fase,
tipicamente tempo-variante, noto come timing jitter. Esso e dovuto a piu
fattori, tra cui le fasi degli oscillatori locali in trasmissione e ricezione ed
il ritardo introdotto dal canale. In questa tesi si studieranno le differenti
componenti che compongono tale rumore poiche, effettuata l’analisi, sara
possibile progettare il filtro di post-detection del sincronizzatore.
Stato dell’arte e scopo della tesi
Il primo scopo di questo lavoro consiste, quindi, nel calcolare la densita
spettrale di potenza del rumore di fase a valle del TED del sincronizzatore,
ponendo particolare attenzione al termine noto come self-noise. Infatti un’a-
nalisi completa di tale componente di rumore di fase e assente in letteratura,
perlomeno per quanto riguarda il contesto in cui questo lavoro si colloca.
Si ritiene opportuno riassumere brevemente quanto e presente in letteratura
sull’argomento, evidenziando di volta in volta i motivi per i quali si rendera
1

necessario lo studio aggiuntivo realizzato in questa tesi.
Per quanto concerne i sincronizzatori feedforward un’ampia ed esaustiva trat-
tazione puo essere trovata in [4], in cui tuttavia viene studiato il solo caso
analogico e, di conseguenza, la condizione di assenza di jitter viene raggiunta
tramite uno zero-crossing detector (ZCD). In questa tesi, pero, si considerano
ricevitori digitali, pertanto l’analisi effettuata in [4] non e adeguata.
Oerder e Meyr, invece, proponendo il loro schema di sincronizzazione digitale
in [1], affermano che, ai fini della valutazione della varianza dell’errore di fase,
non e necessario calcolare la densita spettrale di potenza del self-noise poiche
essa e approssimabile con il suo valore nullo nell’origine, purche si utilizzi un
post-filtro a media mobile sufficientemente lungo nel tempo. In questa tesi,
tuttavia, si desidera rimuovere il vincolo di post-filtro con durata temporale
sufficientemente elevata, poiche l’obiettivo del lavoro consiste proprio nella
progettazione del filtro di post-detection opportuno, senza imposizione di vin-
coli a priori. Infatti, in presenza di rumore di fase tempo-variante, si rende
necessario allargare la banda di transizione del post-filtro, riducendo quindi
la sua durata temporale; appare evidente, pertanto, come la scelta di Oerder
e Meyr non sia adottabile in questo caso.
Serpedin in [3], a sua volta, per il calcolo della varianza del rumore di fase
definisce uno stimatore tale da permettergli di evitare l’analisi della densita
spettrale di potenza del self-noise, per motivi analoghi a quelli ipotizzati da
Oerder e Meyr. Infine, in [5], Serpedin non riporta la densita spettrale di
potenza, bensı calcola direttamente la varianza dell’errore di fase avendo uti-
lizzato un post-filtro a media mobile.
Anche per quanto riguarda i sincronizzatori feedback, in letteratura si trova-
no trattazioni volte alla scrittura della varianza dell’errore di fase in forma
chiusa, per esempio in [6], ma non risultano adeguate per lo scopo di questa
tesi, in quanto non caratterizzano completamente il termine di self-noise ed
impongono vincoli sulla tipologia di post-filtro.
Lo scopo ultimo della tesi, come anticipato, consiste proprio nello studio
del filtro di post-detection da implementare nel sincronizzatore di simbolo:
esso verra progettato sulla base della densita spettrale di potenza del rumore
di fase a valle del TED ed in ingresso al filtro stesso.
Si calcolera, dapprima, il post-filtro ottimo seguendo la teoria sviluppata
2

da Wiener sulla predizione lineare; tale filtro, come si mostrera, garantisce
le prestazioni migliori possibili, poiche minimizza il valore di MSE a valle
del sincronizzatore di simbolo. Si procedera, quindi, con lo studio di so-
luzioni sub-ottime che possano essere implementate al posto del filtro di
post-detection ottimo, tipicamente filtri a singola e doppia media mobile. In-
fatti, per quanto il post-filtro ottimo offra le prestazioni migliori, esso risulta
piu complesso da un punto di vista realizzativo rispetto ai filtri sub-ottimi
adottati comunemente in letteratura. Infine, sfruttando anche la conoscenza
acquisita circa il post-filtro ottimo, si ottimizzeranno le soluzioni sub-ottime
con tecniche differenti.
Contributo della tesi
L’analisi effettuata circa la densita spettrale di potenza del rumore di fase
permettera di quantificare il floor che la varianza del rumore di fase esibisce
ad alto SNR, indipendentemente dal post-filtro utilizzato.
Il confronto tra le prestazioni ottenute utilizzando il filtro di post-detection
ottimo e quelle a valle di post-filtri sub-ottimi offrira la possibilita di valutare
di volta in volta come soddisfare il compromesso tra complessita realizzativa
e qualita della sincronizzazione.
La possibilita di tracciare la varianza del rumore di fase a valle del post-
filtro ottimo permettera, altresı, di valutare la bonta e l’efficacia delle otti-
mizzazioni introdotte sulle varie soluzioni sub-ottime possibili, tanto quelle
proposte in questa tesi, quanto quelle gia presenti ed adottate in letteratura.
Struttura della tesi
Nel capitolo 1 si spieghera il contesto in cui questo lavoro di tesi si inserisce,
offrendo una breve introduzione sul recupero del sincronismo di simbolo ed
approfondendo la descrizione degli algoritmi che verranno analizzati, ossia
quelli di Oerder e Meyr, di Gardner e di Serpedin. Si porra quindi l’accento
sul contributo di rumore di fase che e al centro di questo lavoro: il self-noise.
Si presentera poi la possibilita di eliminare, o quantomeno attenuare, tale
componente di rumore di fase utilizzando un opportuno pre-filtro ottimizzato
in sostituzione del classico filtro adattato.
3

Il capitolo 2 sara totalmente incentrato sull’analisi del self-noise e del
suo impatto nel sincronizzatore di Oerder e Meyr: verra mostrato il modello
costruito per effettuare l’analisi e saranno ricavate le espressioni di densita
spettrale di potenza del rumore di fase ciclostazionaria e mediata. Verran-
no introdotte, inoltre, utili approssimazioni di tali spettri, le quali saranno
adottate nel proseguo della tesi.
Nel capitolo 3 si aggiungera la tempo-varianza sul rumore di fase conside-
rato e si procedera, quindi, con la progettazione del filtro di post-detection per
il sincronizzatore di Oerder e Meyr. Come anticipato, sara ricavato il post-
filtro ottimo e saranno proposte soluzioni sub-ottime, ottimizzate tramite
due differenti tecniche.
Il capitolo 4, invece, spostera l’attenzione su altri schemi di sincronizza-
zione: gli algoritmi di Serpedin e di Gardner. In particolar modo il capitolo
vertera su quest’ultimo, per il quale si effettuera l’analisi della densita spet-
trale di potenza del rumore di fase presente a valle del TED e, analogamente
a quanto effettuato per il caso di Oerder e Meyr, verra progettato il filtro di
post-detection ottimo.
Nel capitolo 5 verranno mostrati e commentati i risultati ottenuti, pren-
dendo in considerazione entrambi i pre-filtri studiati (adattato ed ottimiz-
zato) e tutti i vari post-filtri costruiti (ottimi e sub-ottimi), tanto per i sin-
cronizzatori feedforward di Oerder e Meyr e di Serpedin, quanto per quello
feedback di Gardner. Si validera l’analisi effettuata comparando i risultati
teorici ottenuti da essa con quelli ricavati dalle simulazioni eseguite.
Infine, nel capitolo 6, si riporteranno le conclusioni a riguardo del lavoro
svolto ed i possibili sviluppi futuri.
4

Capitolo 1
Recupero del sincronismo di
simbolo
In questo capitolo viene introdotto il concetto di sincronizzazione dell’istante
di campionamento e sono presentate brevemente alcune delle tecniche prin-
cipali presenti in letteratura. Si pone particolare attenzione all’impatto che
il rumore di fase dipendente dai dati ha sul recupero del sincronismo di sim-
bolo. Si mostra, inoltre, la possibilita di eliminare, o quantomeno attenuare,
tale componente di rumore grazie all’utilizzo di un pre-filtro opportuno.
1.1 Sincronizzatori di simbolo in ricevitori nu-
merici
In un sistema di comunicazione digitale il recupero del sincronismo di
simbolo e di fondamentale importanza in quanto una cattiva sincronizzazio-
ne impatta negativamente sulle prestazioni del sistema stesso. Altrettanto
fondamentale e ad esso collegato e il recupero della frequenza portante, tut-
tavia in questa tesi si suppone di lavorare con il sistema equivalente in banda
base, pertanto non si affronta il problema del sincronismo di portante (car-
rier recovery).
La frequenza dell’oscillatore locale utilizzato dal convertitore digitale - ana-
logico in trasmissione si suppone nota al ricevitore, il quale quindi utilizza un
proprio oscillatore locale alla stessa frequenza per effettuare la conversione
5

1.1. Sincronizzatori di simbolo in ricevitori numerici
analogico-digitale. Supponendo di utilizzare filtri in trasmissione e ricezio-
ne che rispettino il criterio di Nyquist per avere interferenza inter-simbolica
(ISI) nulla, e necessario conoscere la fase di oscillazione opportuna affinche
il convertitore in ricezione possa campionare il segnale negli istanti ottimali,
ossia quelli in corrispondenza della massima apertura del diagramma ad oc-
chio a valle del filtro in ricezione.
L’esempio in Fig.1.1 mostra il campionamento ottimale in verde (fase t0) ed
uno con fase errata in rosso (fase t1). Appare evidente come la conoscenza del-
la sola frequenza di oscillazione non sia sufficiente, infatti entrambi i casi han-
no frequenza corretta 1/T . Inoltre si puo osservare come il campionamento
con fase errata introduca ISI.
Figura 1.1: Diagramma ad occhio a valle del filtro in ricezione.
Cascata di filtri in trasmissione e ricezione del tipo coseno rialzato, con fattore di
roll-off minimo.
Recuperare il sincronismo di simbolo significa, quindi, estrapolare dal se-
gnale ricevuto la fase ottimale per effettuare la conversione analogico-digitale.
Di seguito si chiarisce meglio il procedimento.
Si consideri il segnale ricevuto r(t) campionato con opportuno fattore di
sovracampionamento OSF rispetto al tempo di simbolo T e con fase non
ottimale:
r
(kT
OSF
)=
∞∑
i=−∞
ci v
(kT
OSF− iT − ǫ
)+ w
(kT
OSF
), (1.1)
6

1.1. Sincronizzatori di simbolo in ricevitori numerici
dove {ci} sono i simboli di una costellazione complessa M-QAM o M-PSK,
w(t) e il rumore additivo introdotto dal canale (AWGN) e v(t) e la cascata
di filtro formatore utilizzato dal trasmettitore e filtro adattato in ricezione;
si supponga che v(t) sia a coseno rialzato, soddisfacendo quindi il criterio di
Nyquist, e che abbia valore unitario in corrispondenza di t = 0. Il ritardo
ǫ, non noto al ricevitore, e cio che si desidera stimare per poter poi ricam-
pionare correttamente. Esso e dovuto tipicamente alla fase dell’oscillatore
locale utilizzato in trasmissione, al ritardo introdotto dal canale ed alla fase
dell’oscillatore locale in ricezione; per il momento si suppone ǫ costante nel
tempo.
Recuperare il sincronismo di simbolo consiste, quindi, in due passi:
• stimare il ritardo ǫ a partire dal segnale ricevuto e campionato con fase
non ottimale (stima)
• ricampionare negli istanti ottimali il segnale stesso (correzione).
Se la stima di ǫ e corretta, si ottiene quindi un segnale ricampionato in
corrispondenza della massima apertura del diagramma ad occhio, nel modo
seguente:
r (kT + ǫ) =∞∑
i=−∞
ci v (kT + ǫ− iT − ǫ) + w(kT + ǫ)
= ck + w(kT + ǫ) , (1.2)
avendo imposto OSF pari a 1 per semplicita. Si nota come, in assenza del
rumore di canale w(t), si recuperi correttamente il simbolo trasmesso, privo
di ISI.
1.1.1 Classificazione dei sincronizzatori
In letteratura sono presenti diverse architetture per il recupero del sincro-
nismo di simbolo in sistemi di comunicazione digitali, ognuna con i propri
vantaggi e svantaggi. Di seguito si riporta una breve classificazione degli
schemi possibili, senza dettagli eccessivi, al solo fine di inquadrare le carat-
teristiche principali dei vari sincronizzatori. Una spiegazione piu esaustiva
7

1.1. Sincronizzatori di simbolo in ricevitori numerici
verra riportata nei paragrafi seguenti per i sincronizzatori utilizzati in questa
tesi: Oerder e Meyr, Serpedin e Gardner.
Una prima suddivisione puo essere introdotta tra gli algoritmi che utiliz-
zano o meno simboli pilota o preamboli inseriti appositamente nella trasmis-
sione, al fine di agevolare il recupero di sincronismo. Un’altra importante
distinzione va fatta tra architetture retroazionate o meno, rispettivamente
feedback e feedforward.
Gli algoritmi che utilizzano simboli pilota o preamboli (data-aided) hanno
come punto di forza la possibilita di raggiungere prestazioni migliori, come
intuibile, ma devono pagare il costo di una riduzione della capacita, dovuta
alla trasmissione di tali simboli, privi di contenuto informativo ai fini della
trasmissione dei dati.
Questi algoritmi possono essere utilizzati sia con un’architettura retroazio-
nata, sia con una non in retroazione. Tipicamente tuttavia, grazie ai loro
preamboli, sono molto utili per la fase di aggancio nelle configurazioni re-
troazionate.
Tutti gli schemi che verranno analizzati in questa tesi non utilizzano simboli
pilota.
Una rappresentazione schematica di una architettura non retroazionata
e riportata in Fig.1.2: un oscillatore locale (OL) regola il campionamento
del segnale ricevuto, a valle del quale viene implementata la stima di ǫ e la
successiva correzione.
Figura 1.2: Configurazione non retroazionata di stima e correzione.
8

1.1. Sincronizzatori di simbolo in ricevitori numerici
Nel caso di retroazione l’architettura di base appare, invece, come quella ri-
portata in Fig.1.3: la stima di ǫ viene effettuata dal Timing Error Detector
(TED) e dal successivo filtro d’anello, i quali ricevono in ingresso i dati pre-
cedentemente corretti, a differenza del caso non retroazionato; si ha poi la
fase di correzione.
Figura 1.3: Configurazione retroazionata di stima e correzione.
Lo svantaggio di architetture non retroazionate consiste nel dovere lavorare
con fattore di sovracampionamento OSF tipicamente maggiore rispetto agli
schemi retroazionati, allo scopo di soddisfare correttamente il teorema del
campionamento senza introduzione di aliasing ; frequenze piu elevate di cam-
pionamento sono, tuttavia, computazionalmente piu costose. Le architetture
retroazionate, invece, hanno problemi relativi al ritardo nell’anello, il quale
va gestito in modo accurato.
1.1.2 Sincronizzatore di Oerder e Meyr
Nel 1988 Oerder e Meyr (O&M) proposero uno schema non retroazionato
per il recupero del sincronismo di simbolo [1], il cui schema a blocchi e ripor-
tato in Fig.1.4.
Il tempo di simbolo T e supposto noto al ricevitore. Per la stima di ǫ l’algo-
ritmo di Oerder e Meyr prevede che il segnale ricevuto r(t) venga campionato
a frequenza pari ad almeno quattro volte il tempo di simbolo; per semplicita
nel seguito si assume intervallo di campionamento Ts pari a T/4. L’idea alla
base dell’algoritmo e analoga a quella di Franks e Bubrouski [7] per il caso
9

1.1. Sincronizzatori di simbolo in ricevitori numerici
tempo-continuo: sfruttare la ciclostazionarieta del segnale ricevuto (oppor-
tunamente filtrato dal filtro in ricezione), elevando al quadrato i campioni del
segnale e procurandosi in tal modo una sequenza il cui valor medio contiene i
campioni della sinusoide sincronizzante. Tale sinusoide e alla frequenza desi-
derata e l’informazione sull’istante di sincronismo e contenuta nella sua fase.
Pertanto e necessario estrapolare la fase della sincronizzante demodulando il
quadrato con una sinusoide complessa a frequenza −1/T e filtrando passa-
basso. Ottenuta la stima ǫ, la si utilizza per interpolare il segnale in uscita dal
filtro in ricezione, precedentemente ritardato in modo opportuno per tenere
conto dei ritardi eventualmente introdotti dal filtraggio passa-basso.
Figura 1.4: Schema a blocchi del sincronizzatore di simbolo di O&M.
1.1.3 Sincronizzatore di Gardner
Nel 1986 Gardner propose invece un’architettura retroazionata [2], il cui
schema a blocchi e riportato in Fig.1.5.
A differenza dell’algoritmo di Oerder e Meyr, il sincronizzatore di Gardner
lavora con intervallo di campionamento Ts pari a T/2. L’idea alla base di
questo algoritmo consiste nell’individuazione del massimo della potenza ci-
clostazionaria in ingresso al Timing Error Detector (TED) cercando lo zero
della sua derivata; tale derivata viene approssimata come differenza tra due
campioni a passo di simbolo T . A valle del TED e quindi possibile ottenere
la fase desiderata tramite opportuno filtraggio passa-basso.
10

1.1. Sincronizzatori di simbolo in ricevitori numerici
Figura 1.5: Schema a blocchi del sincronizzatore di simbolo di Gardner.
1.1.4 Sincronizzatore di Serpedin
Nel 2002 Lee propose uno schema non retroazionato il quale richiedeva
solo due campioni per tempo di simbolo [8]; altri schemi feedforward a T/2
erano gia stati proposti, ma erano computazionalmente piu onerosi. Nel 2003
Serpedin [3], partendo dall’idea di Lee, propose una variante che permette-
va di raggiungere una stima asintoticamente non polarizzata ed un minore
MSE, sempre mantenendo uno schema non retroazionato ed un tempo di
campionamento Ts pari a T/2.
Figura 1.6: Schema a blocchi del sincronizzatore di simbolo di Serpedin.
L’idea alla base dell’algoritmo di Serpedin e quella di approssimare l’uscita
del classico quadratore di Oerder e Meyr (non retroazionato, a T/4) tramite
due TED in parallelo, ognuno dei quali operante a T/2. Uno dei due TED
coincide esattamente con quello di Oerder e Meyr ma lavora a T/2 e, per-
tanto, fornisce solo due dei quattro campioni per tempo di simbolo necessari
per approssimare il classico quadratore. Gli altri due campioni sono estratti
11

1.2. Rumore dipendente dai dati: self-noise
invece dal secondo TED, analogo a quello di Gardner; esso fornisce un’ap-
prossimazione sufficientemente accurata dei campioni desiderati.
Per maggior chiarezza si riporta di seguito un breve esempio. Si chiamino yk
i campioni in ingresso al doppio TED dello schema di Serpedin
y k2
= y(kTs) = y
(kT
2
). (1.3)
Il classico quadratore di Oerder e Meyr fornirebbe in uscita i seguenti quattro
campioni in un tempo di simbolo T
y20 y214
y212
y234
. (1.4)
Il primo TED dello schema di Serpedin fornisce i seguenti due campioni in
un tempo di simbolo
y20 y212
(1.5)
che sono esattamente il primo ed il terzo di (1.4). Il secondo TED, invece,
fornisce in uscita
ℜ{y0 y∗12
} ℜ{y∗12
y1} (1.6)
che risultano essere una sufficientemente buona approssimazione del secondo
e del quarto di (1.4), come dimostrato in [3] e validato dalle prestazioni
ottenute.
1.2 Rumore dipendente dai dati: self-noise
I sincronizzatori per il recupero del sincronismo di simbolo, siano essi re-
troazionati o meno, soffrono della presenza di una componente di rumore di
fase indipendente dal rapporto segnale-rumore SNR, denominata self-noise.
L’indipendenza di tale contributo di rumore di fase dal valore di SNR com-
porta la presenza di fluttuazioni che degradano le prestazioni del ricevitore
stesso, anche in assenza di rumore AWGN sul canale e di altre fonti di rumo-
re; cio si traduce nella presenza di un asintoto costante (floor) nella varianza
dell’errore di fase. Fluttuazioni di fase di questo tipo sono dovute alla natura
12

1.3. Pre-filtro ottimizzato
casuale del flusso di dati trasmessi e alla non linearita presente nei TED dei
sincronizzatori. Per tale motivo il self-noise e anche noto come pattern-noise,
in quanto legato appunto ai dati stessi.
Per meglio comprendere in cosa consista questa componente di degrado,
si prenda in considerazione il sincronizzatore di Oerder e Meyr e, per sem-
plicita, si immagini rumore di canale nullo. Il TED, come precedentemente
spiegato ed illustrato nello schema di Fig.1.4, calcola il quadrato dell’ingres-
so, lo demodula in modo opportuno e lo filtra passa-basso. Il TED fornisce
in uscita, quindi, la fase corretta della sincronizzante, coincidente come detto
con il valor medio, ed una componente di rumore a media nulla, il self-noise.
Appare a questo punto evidente il motivo del nome: esso e dovuto al bat-
timento del segnale con se stesso, causato dalla non linearita presente nel
TED, ossia dall’elevamento al quadrato.
Un discorso analogo puo essere fatto per i sincronizzatori di Gardner e Ser-
pedin.
Nel caso di rumore di canale non nullo, oltre al self-noise, saranno ovviamente
presenti altri termini di degrado.
Il contributo di rumore di fase causato dal self-noise e al centro di questo
lavoro di tesi. Si analizzera nel seguito l’entita del termine di varianza del
rumore di fase ad esso dovuto. Inoltre si mostrera la possibilita di attenuare
o eliminare il self-noise, sotto specifiche condizioni, tramite l’utilizzo di un
opportuno pre-filtro, presentato nella sezione seguente. L’analisi della densita
spettrale di potenza di tale contributo di rumore di fase permettera anche la
progettazione del filtro di post-detection.
1.3 Pre-filtro ottimizzato
In questa tesi, supponendo il filtro in trasmissione del tipo radice di coseno
rialzato, si considerano due diversi filtri in ricezione: il filtro adattato a
quello in trasmissione (matched filter MF) ed il pre-filtro ottimizzato (PO).
L’introduzione di un filtro PO differente dal classico MF mira a minimizzare
il self-noise a valle dello stesso.
Le condizioni che la cascata di filtro in trasmissione e filtro in ricezione
deve rispettare affinche il termine di self-noise venga minimizzato sono sta-
13

1.3. Pre-filtro ottimizzato
te evidenziate da Franks e Bubrouski in [7] e da D’Andrea e Luise in [9],
rispettivamente per il sincronizzatore a quadratore tempo-continuo e per il
sincronizzatore di Gardner.
Il pre-filtro ottimizzato PO utilizzato in questa tesi e, tuttavia, quello presen-
tato da Spalvieri e Magarini in [10], in quanto quest’ultimo PO offre anche
la minimizzazione del termine di rumore di fase dovuto al battimento del
rumore di canale con se stesso. Si omette una spiegazione dettagliata sulla
costruzione del pre-filtro ottimizzato in questione, limitandosi ad una breve
ed intuitiva osservazione volta alla comprensione dell’idea alla base di tale
pre-filtro; per una trattazione esaustiva si rimanda a [10].
Si chiami g(t) la risposta all’impulso del filtro formatore utilizzato in
trasmissione e sia G(f) la sua risposta in frequenza del tipo radice di coseno
rialzato. Sia T il tempo di simbolo e α il fattore di roll-off del filtro. La
risposta in frequenza P (f) del pre-filtro ottimizzato e la seguente
P (f) =
0 0 ≤ f < 1−α2T
G∗(T−1 − f) 1−α2T
≤ f < 1+α2T
non vincolato 1+α2T
≤ f < 1T
0 f ≥ 1T
. (1.7)
Per comprendere il motivo per il quale il pre-filtro viene costruito in questo
modo si prenda nuovamente in considerazione il sincronizzatore di Oerder e
Meyr, per il quale e gia stato osservato che la sincronizzante da cui estrarre la
stima della fase desiderata si trova a frequenza 1/T . Si possono quindi pre-
filtrare via le frequenze che, a valle dell’elevamento al quadrato, non daranno
un contributo costruttivo alla frequenza 1/T : si tratta delle frequenze che,
prima dell’elevamento, sono minori di (1−α)/2T e maggiori di 1/T . Si ricorda
che G(f) e del tipo radice di coseno rialzato, con banda unilatera BG pari a
(1 + α)/2T . Nella zona di frequenze comprese tra (1 − α)/2T e (1 + α)/2T
l’andamento di P (f) e imposto dalla condizione per la minimizzazione del
self-noise presentata in [7] e qui non indagata ulteriormente per brevita. Tra
(1+α)/2T e 1/T non vi e l’imposizione di vincoli particolari; in questo lavoro
14

1.3. Pre-filtro ottimizzato
di tesi, tuttavia, si e scelto anche per questa banda un andamento del tipo
radice di coseno rialzato, al fine di evitare transizioni brusche e discontinuita
nella funzione P (f) e nella sua derivata prima.
Figura 1.7: Risposta in frequenza del filtro in trasmissione G(f), radice di coseno
rialzato con roll-off α pari a 0.25, e del pre-filtro ottimizzato P(f).
La Fig.1.7 riporta il pre-filtro della (1.7), evidenziando le 4 bande su cui esso
e definito a tratti.
15

Capitolo 2
Analisi del self-noise nel
sincronizzatore di simbolo
di Oerder&Meyr
In questo capitolo viene effettuato uno studio approfondito della densita spet-
trale di potenza del rumore di fase nel sincronizzatore di simbolo di Oerder
e Meyr. In particolar modo viene caratterizzato il rumore di fase dipendente
dai dati (self-noise), in quanto in letteratura non e presente un’analisi com-
pleta, ma essa e indispensabile per la progettazione del post-filtro ottimo.
Si introduce, inoltre, una formulazione approssimata e piu compatta della
densita spettrale di potenza del rumore di fase e se ne dimostra la validita.
2.1 Scenario e modello
Si consideri lo schema a blocchi del sistema di comunicazione digitale
riportato in Fig.2.1, supponendo una modulazione M-QAM o M-PSK, con
{ci} i simboli della costellazione complessa.
Lo schema a blocchi riportato sulla prima riga in Fig.2.1 rappresenta il siste-
ma di comunicazione preso come riferimento, per il quale e stato formulato
un modello equivalente, mostrato sulla seconda riga della figura; nel seguito
si utilizza per semplicita il modello equivalente.
Gli oscillatori locali reali utilizzati in trasmissione e ricezione introducono un
16

2.1. Scenario e modello
disturbo, il quale viene modellizzato come rumore di fase (2πτ1/T e 2πτ2/T )
ed e supposto, per il momento, costante nel tempo.
Figura 2.1: Schema a blocchi del sistema di comunicazione studiato e suo modello
equivalente.
Il TED e quello del sincronizzatore di Oerder e Meyr (O&M), pertanto i
convertitori digitale-analogico e analogico-digitale, rispettivamente DAC e
ADC, lavorano con fattore di sovracampionamento OSF pari a quattro volte
il tempo di simbolo T ; si ricorda che il sincronizzatore di O&M richiede OSF
maggiore od uguale a quattro.
Nel modello equivalente, mostrato in basso in Fig.2.1, la parte contenuta nel
riquadro verde in alto e stata modellizzata come interpolatore sinc(4t/T +
ǫ/T ) e rumore additivo w(kT/4), gaussiano e bianco sulla banda di interesse.
La dipendenza da τ2 del termine di rumore e stata trascurata nel modello
equivalente in quanto il rumore risulta essere statisticamente indipendente
da τ2.
17

2.1. Scenario e modello
Si definiscono di seguito le altre grandezze riportate in figura:
• g(t) risposta all’impulso del filtro formatore in trasmissione (radice di
coseno rialzato in frequenza, con fattore di roll-off α);
• p(t) risposta all’impulso del filtro in ricezione: pre-filtro adattato a g(t)
(MF) oppure pre-filtro ottimizzato (PO) di [10];
• q(t) risposta all’impulso del filtro di ricostruzione (anti-replica);
• LPF Low Pass Filter, ossia filtro passa-basso anti-aliasing ;
• w(t) rumore di tipo AWGN introdotto dal canale;
• τ ritardo eventualmente introdotto dal canale, supposto costante in
questa tesi.
Si definisce il parametro ǫ
ǫ = τ2 − τ − τ1 , (2.1)
il quale coincide con il ritardo che il sincronizzatore di O&M deve stimare e
correggere affinche il ricampionamento avvenga negli istanti ottimali.
Il segnale ricevuto e campionato con fase non ottimale dal ricevitore risulta
quindi
r
(kT
4; ǫ
)=
∞∑
i=−∞
ci g
(kT
4−iT
)∗ sinc
(4t
T+ǫ
T
)∣∣∣∣t= kT
4
+ w
(kT
4
), (2.2)
in cui e stato utilizzato il simbolo ∗ per indicare la convoluzione. Il segnale
r(kT/4; ǫ) viene filtrato dal pre-filtro p(t), a valle del quale si ottiene
y
(kT
4; ǫ
)= r
(kT
4; ǫ
)∗ p(kT
4
)
=∞∑
i=−∞
ci v (t−iT+ǫ)|t= kT4
+ w
(kT
4
)∗ p(kT
4
)
= s
(kT
4; ǫ
)+ n
(kT
4
). (2.3)
18
2.1. Scenario e modello
Si definisce v(t) la risposta all’impulso della cascata di filtro in trasmissione
e pre-filtro in ricezione, s(t) il contributo di y(t) dipendente dai dati e n(t)
quello dipendente, invece, dal rumore di canale.
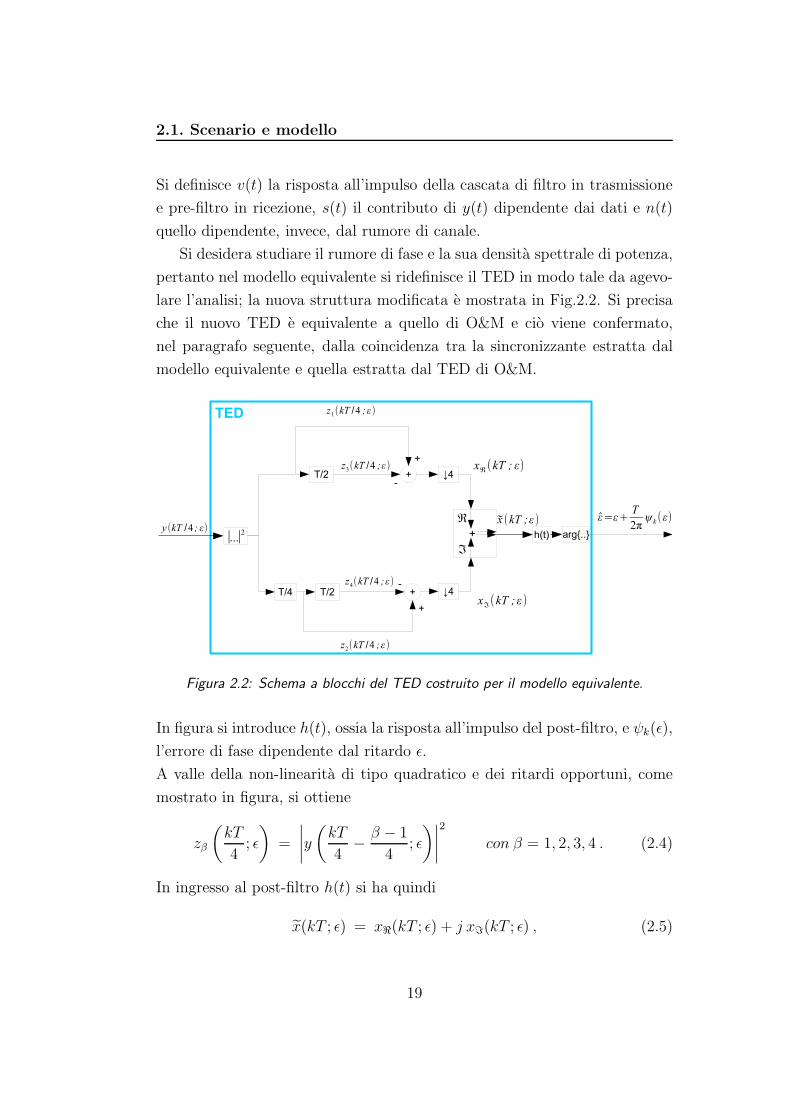
Si desidera studiare il rumore di fase e la sua densita spettrale di potenza,
pertanto nel modello equivalente si ridefinisce il TED in modo tale da agevo-
lare l’analisi; la nuova struttura modificata e mostrata in Fig.2.2. Si precisa
che il nuovo TED e equivalente a quello di O&M e cio viene confermato,
nel paragrafo seguente, dalla coincidenza tra la sincronizzante estratta dal
modello equivalente e quella estratta dal TED di O&M.
Figura 2.2: Schema a blocchi del TED costruito per il modello equivalente.
In figura si introduce h(t), ossia la risposta all’impulso del post-filtro, e ψk(ǫ),
l’errore di fase dipendente dal ritardo ǫ.
A valle della non-linearita di tipo quadratico e dei ritardi opportuni, come
mostrato in figura, si ottiene
zβ
(kT
4; ǫ
)=
∣∣∣∣y(kT
4− β − 1
4; ǫ
)∣∣∣∣2
con β = 1, 2, 3, 4 . (2.4)
In ingresso al post-filtro h(t) si ha quindi
x(kT ; ǫ) = xℜ(kT ; ǫ) + j xℑ(kT ; ǫ) , (2.5)
19

2.1. Scenario e modello
con
xℜ(kT ; ǫ) = z1 (kT ; ǫ)− z3 (kT ; ǫ) (2.6)
xℑ(kT ; ǫ) = z2 (kT ; ǫ)− z4 (kT ; ǫ) , (2.7)
dove i pedici ℜ e ℑ sono usati, rispettivamente, per indicare la parte reale e
la parte immaginaria.
Inoltre, come riportato nel paragrafo seguente, si puo dimostrare che
xℜ(kT ; ǫ) = A cos
(2πǫ
T
)+ νℜ(kT ; ǫ) , (2.8)
xℑ(kT ; ǫ) = A sin
(2πǫ
T
)+ νℑ(kT ; ǫ) , (2.9)
xk(ǫ) = x(kT ; ǫ) = Aej2πǫT + νk(ǫ) , (2.10)
dove sono stati separati i termini deterministici e utili al fine della stima
di ǫ, ossia quelli che costituiscono la sincronizzante demodulata, dai termini
casuali di rumore ν. L’ampiezza media A vale
A =
∣∣∣∣∣4C2
T
∫ T−1
0
V (β)V ∗
(1
T− β
)dβ
∣∣∣∣∣ (2.11)
con C2 pari a E{|ci|2}, con l’apice ∗ ad indicare il complesso coniugato e con
V (f) risposta in frequenza della cascata di filtro in trasmissione e pre-filtro
in ricezione. Nel caso di pre-filtro MF o di pre-filtro PO l’ampiezza media
vale α/2.
Lo scopo, si ricorda, e determinare la densita spettrale di potenza del
rumore di fase ψk(ǫ). Si consideri quindi la Fig.2.3, in cui sono evidenziate
tanto le componenti reale ed immaginaria del termine di rumore νk(ǫ), quanto
la sua scomposizione in componenti radiale e tangenziale (indicate rispettiva-
mente con i pedici rad e tg). Poiche non e agevole studiare il rumore di fase
ψk(ǫ) a valle dell’estrazione di argomento, come invece sarebbe necessario in
base allo schema in Fig.2.2, si introduce l’approssimazione seguente
ψk(ǫ) = arctg
(νk,tg(ǫ)
νk,rad(ǫ) + A
)≃ νk,tg(ǫ)
A. (2.12)
Fintanto che si studia il caso ideale con ǫ = 0, si ha
νℑ(kT ; ǫ = 0) = νtg(kT ; ǫ = 0) , (2.13)
20
2.1. Scenario e modello
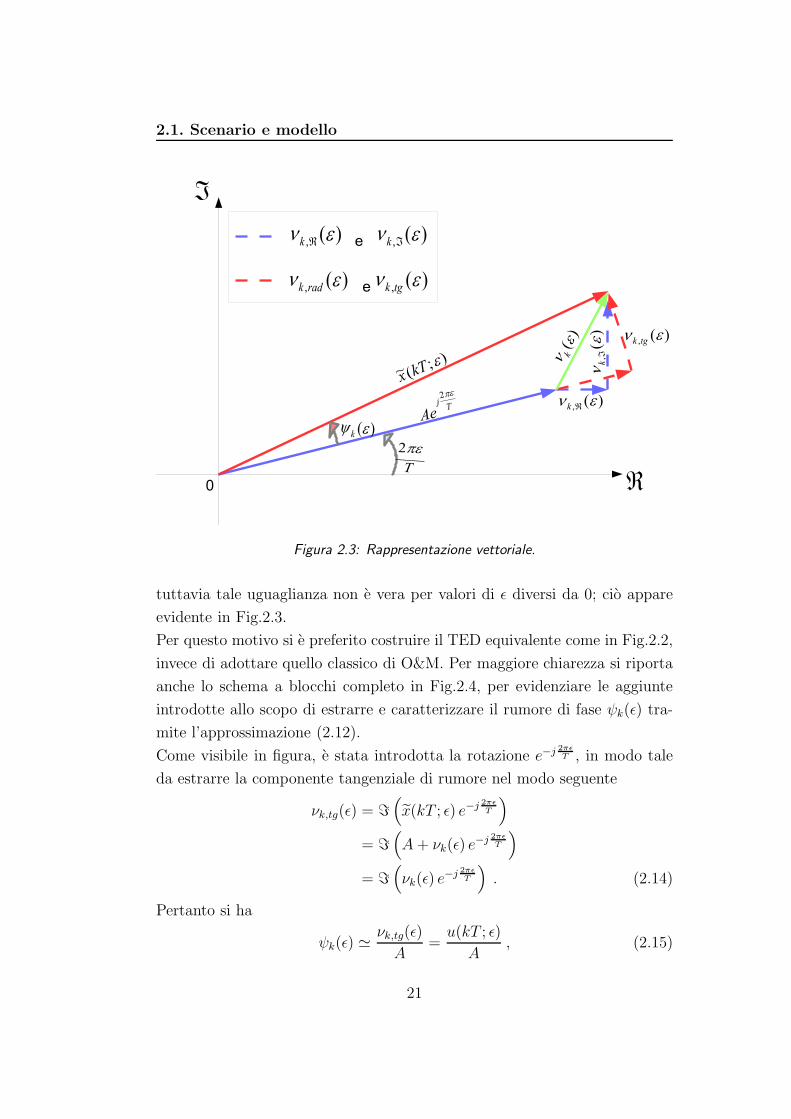
Figura 2.3: Rappresentazione vettoriale.
tuttavia tale uguaglianza non e vera per valori di ǫ diversi da 0; cio appare
evidente in Fig.2.3.
Per questo motivo si e preferito costruire il TED equivalente come in Fig.2.2,
invece di adottare quello classico di O&M. Per maggiore chiarezza si riporta
anche lo schema a blocchi completo in Fig.2.4, per evidenziare le aggiunte
introdotte allo scopo di estrarre e caratterizzare il rumore di fase ψk(ǫ) tra-
mite l’approssimazione (2.12).
Come visibile in figura, e stata introdotta la rotazione e−j2πǫT , in modo tale
da estrarre la componente tangenziale di rumore nel modo seguente
νk,tg(ǫ) = ℑ(x(kT ; ǫ) e−j
2πǫT
)
= ℑ(A+ νk(ǫ) e
−j 2πǫT
)
= ℑ(νk(ǫ) e
−j 2πǫT
). (2.14)
Pertanto si ha
ψk(ǫ) ≃νk,tg(ǫ)
A=u(kT ; ǫ)
A, (2.15)
21

2.1. Scenario e modello
con
u(kT ; ǫ) = ℑ(x(kT ; ǫ) e−j
2πǫT
)
= xℑ(kT ; ǫ) cos
(2πǫ
T
)− xℜ(kT ; ǫ) sin
(2πǫ
T
). (2.16)
Figura 2.4: Schema a blocchi del TED e dell’estrazione del rumore di fase nel modello
equivalente.
2.1.1 Sincronizzante
Si dimostra ora la validita delle equazioni (2.8) e (2.9), ossia che xℜ(kT ; ǫ)
e xℑ(kT ; ǫ) abbiano una parte deterministica (il valore medio) dalla quale si
estrae la stima di ǫ: essa costituisce la sincronizzante demodulata, in analogia
con il sincronizzatore a quadratore tempo-continuo e con lo schema di Oerder-
Meyr.
Si riportano, per brevita, solo i passaggi principali ed i risultati; la trattazione
completa puo essere trovata in Appendice A. Per comodita si svolge l’analisi
nel tempo-continuo e, al termine, si campiona in modo opportuno.
22

2.2. Densita spettrale di potenza ciclostazionaria del rumore di
fase
Il contributo deterministico di xℜ(kT ; ǫ) si ottiene come
E {xℜ(kT ; ǫ)} = E {xℜ(t; ǫ)|t=kT}= E {z1 (t; ǫ)− z3 (t; ǫ)}|t=kT
=A
2cos
(2π(t+ ǫ)
T
)∣∣∣∣t=kT
− A
2cos
(2π(t− T/2 + ǫ)
T
)∣∣∣∣t=kT
= A cos
(2πǫ
T
). (2.17)
Analogamente il contributo deterministico di xℑ(kT ; ǫ) vale
E {xℑ(kT ; ǫ)} = E {xℑ(t; ǫ)|t=kT} = A sin
(2πǫ
T
). (2.18)
2.2 Densita spettrale di potenza ciclostazio-
naria del rumore di fase
Ottenuto il rumore di fase ψk(ǫ) dalle equazioni (2.15) e (2.16), si puo pro-
cedere alla sua caratterizzazione tramite calcolo della sua autocorrelazione
e, quindi, della sua densita spettrale di potenza. Si sottolinea la dipendenza
di ψk dal parametrio ǫ, dovuta al fatto che il segnale y(kT/4; ǫ) in ingresso
al TED e ciclostazionario, in quanto il suo valore quadratico medio risulta
essere periodico in ǫ di periodo pari al tempo di simbolo T . Pertanto autocor-
relazione e densita spettrale di potenza di ψk(ǫ) risultano essere dipendenti
da ǫ, rispettivamente nel modo seguente
Rψ(mT ; ǫ) =Ru(mT ; ǫ)
A2(2.19)
e
Sψ(ej2πfT ; ǫ) =
Su(ej2πfT ; ǫ)
A2
=Fm{Ru(mT ; ǫ)}
A2, (2.20)
23

2.2. Densita spettrale di potenza ciclostazionaria del rumore di
fase
dove FB{C} indica la trasformata di Fourier di C integrando su B.
L’autocorrelazione di u(kT ; ǫ) vale
Ru(mT ; ǫ) = E {u∗(kT ; ǫ) u(kT +mT ; ǫ)} (2.21)
= E
{(xℑ(kT ; ǫ) cos
(2πǫ
T
)− xℜ(kT ; ǫ) sin
(2πǫ
T
))
(xℑ(kT+mT ; ǫ) cos
(2πǫ
T
)− xℜ(kT+mT ; ǫ) sin
(2πǫ
T
))}
= E
{xℑ(kT ; ǫ) xℑ(kT +mT ; ǫ) cos2
(2πǫ
T
)+
+ xℜ(kT ; ǫ) xℜ(kT +mT ; ǫ) sin2
(2πǫ
T
)+
− xℑ(kT ; ǫ) xℜ(kT +mT ; ǫ) cos
(2πǫ
T
)sin
(2πǫ
T
)+
−xℜ(kT ; ǫ) xℑ(kT +mT ; ǫ) cos
(2πǫ
T
)sin
(2πǫ
T
)}
= Rxℑ(mT ; ǫ) cos2
(2πǫ
T
)+
+Rxℜ(mT ; ǫ) sin2
(2πǫ
T
)+
− (Rxℑxℜ(mT ; ǫ) +Rxℜxℑ(mT ; ǫ)) cos
(2πǫ
T
)sin
(2πǫ
T
);
si rimanda all’Appendice B per il calcolo delle autocorrelazioni e delle cross-
correlazioni Rxℑ(mT ; ǫ), Rxℜ(mT ; ǫ), Rxℑxℜ(mT ; ǫ) e Rxℜxℑ(mT ; ǫ).
Tanto l’autocorrelazione Rψ(mT ; ǫ) quanto la densita spettrale di poten-
za Sψ(ej2πfT ; ǫ) risultano composte da tre termini additivi che sorgono a
valle della non-linearita di tipo quadratico del TED: si tratta dei battimen-
ti rumore-rumore (NxN), segnale-rumore (SxN) e segnale-segnale (SxS); il
termine SxS e proprio il contributo di self-noise. E quindi possibile scrivere
Rψ(mT ; ǫ) = Rψ,N×N (mT ; ǫ) +Rψ,S×N(mT ; ǫ) +Rψ,S×S(mT ; ǫ) (2.22)
Sψ(ej2πfT ; ǫ) = Sψ,N×N (e
j2πfT ; ǫ) + Sψ,S×N(ej2πfT ; ǫ) +
+ Sψ,S×S(ej2πfT ; ǫ) . (2.23)
Per avere idea dell’andamento del contributo di self-noise, il quale e al
centro dell’analisi di questa tesi, si riporta in Fig.2.5 la densita spettrale di
24
2.2. Densita spettrale di potenza ciclostazionaria del rumore di
fase
10−4
10−3
10−2
10−1−50
−40
−30
−20
−10
0
10
20
f T
Sψ
, S ×
S(e
j2π
fT;ε
) [d
B]
ε/T = 0ε/T = 0.25ε/T = 0.50ε/T = 0.75ε/T = 1
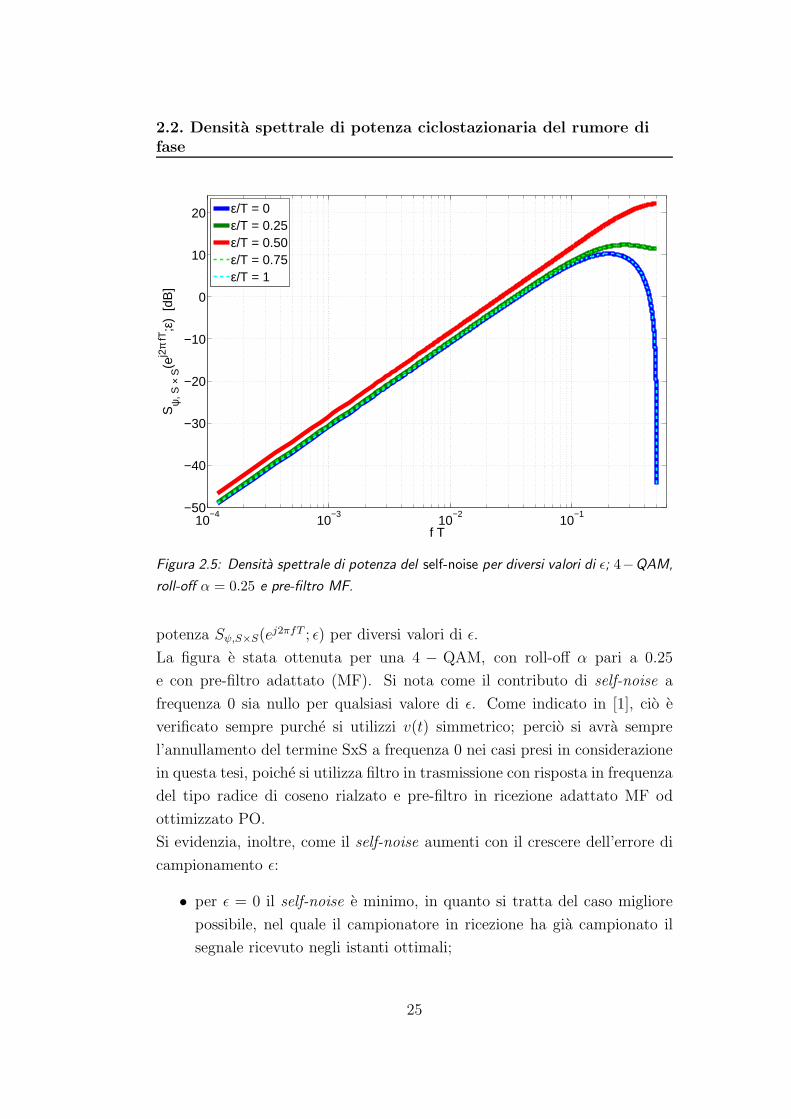
Figura 2.5: Densita spettrale di potenza del self-noise per diversi valori di ǫ; 4−QAM,
roll-off α = 0.25 e pre-filtro MF.
potenza Sψ,S×S(ej2πfT ; ǫ) per diversi valori di ǫ.
La figura e stata ottenuta per una 4 − QAM, con roll-off α pari a 0.25
e con pre-filtro adattato (MF). Si nota come il contributo di self-noise a
frequenza 0 sia nullo per qualsiasi valore di ǫ. Come indicato in [1], cio e
verificato sempre purche si utilizzi v(t) simmetrico; percio si avra sempre
l’annullamento del termine SxS a frequenza 0 nei casi presi in considerazione
in questa tesi, poiche si utilizza filtro in trasmissione con risposta in frequenza
del tipo radice di coseno rialzato e pre-filtro in ricezione adattato MF od
ottimizzato PO.
Si evidenzia, inoltre, come il self-noise aumenti con il crescere dell’errore di
campionamento ǫ:
• per ǫ = 0 il self-noise e minimo, in quanto si tratta del caso migliore
possibile, nel quale il campionatore in ricezione ha gia campionato il
segnale ricevuto negli istanti ottimali;
25

2.2. Densita spettrale di potenza ciclostazionaria del rumore di
fase
• per ǫ = T/2 il contributo SxS raggiunge il suo massimo, in quanto il
campionamento e avvenuto a distanza massima dagli istanti ottimali;
• per ǫ = {T/4, 3T/4} si ottiene un contributo intermedio;
• per ǫ = T si trova di nuovo self-noise minimo, confermando quanto
detto circa la periodicita della densita spettrale di potenza.
Si sottolinea, infine, la pendenza di 20 dB/decade, caratteristica che tornera
utile per l’approssimazione di Sψ,S×S(ej2πfT ; ǫ) introdotta nella sezione 2.3.
2.2.1 Densita spettrale di potenza media del rumore
di fase
Autocorrelazione e densita spettrale di potenza del rumore di fase sono,
come detto, periodiche in ǫ di periodo T . Puo essere utile calcolare il loro
valore mediato su tutti i possibili ǫ nel modo seguente
Rψ(mT ) =1
T
∫ T
0
Rψ(mT ; ǫ) · ddp(ǫ)dǫ , (2.24)
dove i limiti d’integrazione sono dovuti alla natura periodica di periodo T e
dove si e indicata con ddp(ǫ) la densita di probabilita di ǫ, assunta nel seguito
uniforme. Si ottiene quindi
Rψ(mT ) =1
T
∫ T
0
Rψ(mT ; ǫ)dǫ (2.25)
=1
A2 T
∫ T
0
Rxℑ(mT ; ǫ) cos2
(2πǫ
T
)dǫ +
+1
A2 T
∫ T
0
Rxℜ(mT ; ǫ) sin2
(2πǫ
T
)dǫ +
− 1
A2 T
∫ T
0
(Rxℑxℜ(mT ; ǫ)+Rxℜxℑ(mT ; ǫ)) cos
(2πǫ
T
)sin
(2πǫ
T
)dǫ .
Di conseguenza la densita spettrale di potenza (DSP) media risulta essere
Sψ(ej2πfT ) = Fm{Rψ(mT )} . (2.26)
26

2.2. Densita spettrale di potenza ciclostazionaria del rumore di
fase
Per esempio in Fig.2.6 si mostra la DSP media per il contributo di self-noise.
La figura e stata ottenuta per una 4 − QAM, con roll-off α pari a 0.25 e
con pre-filtro adattato (MF) ed ottimizzato PO. Si sottolinea nuovamente
la pendenza di 20 dB/decade alle basse frequenze, caratteristica che verra
sfruttata nella sezione seguente.
Si evidenzia inoltre come il pre-filtro PO riduca effettivamente il termine di
self-noise. Esso, si ricorda, viene annullato del tutto solo nel caso di ǫ pari a
multipli interi del tempo di simbolo T .
10−3
10−2
10−1
100
−60
−50
−40
−30
−20
−10
0
10
20
f T
Sψ
,S×
S (
e j 2
π f T
) [
dB]
MFPO
Figura 2.6: Densita spettrale di potenza del self-noise mediata su ǫ; 4−QAM, roll-off
α = 0.25 e pre-filtri MF e PO.
27

2.3. Approssimazione della DSP del rumore di fase
2.3 Approssimazione della DSP del rumore
di fase
La densita spettrale di potenza (DSP) del rumore di fase, sia essa espressa
come dipendente da ǫ o mediata su tutti i valori possibili di ǫ (rispettivamente
Sψ(ej2πfT ; ǫ) e Sψ(e
j2πfT )), risulta essere poco maneggevole nella formulazio-
ne ottenuta nelle equazioni (2.20) e (2.26). Si desidera quindi introdurre
alcune approssimazioni per ottenere una scrittura maggiormente compatta,
ossia
Sψ(ej2πfT ; ǫ) ≃ βN×N + βS×N + βS×S(ǫ)(1− ej2πfT )(1− e−j2πfT ) (2.27)
Sψ(ej2πfT ) ≃ βN×N + βS×N + βS×S(1− ej2πfT )(1− e−j2πfT ) , (2.28)
in cui sono stati messi in evidenza i contributi NxN, SxN e SxS. Le moti-
vazioni di tale scrittura saranno chiarite nei paragrafi seguenti, cosı come
verranno definiti i termini βN×N , βS×N , βS×S e βS×S(ǫ).
2.3.1 Approssimazione del contributo N ×N
Si nota che il termine Sψ,N×N(ej2πfT ) ha pendenza nulla alle frequen-
ze di interesse, ossia le basse frequenze che verranno selezionate dal post-
filtro passa-basso h(t), pertanto si desidera approssimarlo con il suo valore a
frequenza 0, come segue
βN×N = Sψ,N×N(ej2πfT )
∣∣f=0
=∞∑
m=−∞
Rψ,N×N(mT ) . (2.29)
Nei casi presi in esame in questa tesi, sia con pre-filtro MF sia con pre-filtro
PO, si ottiene
βN×N =α
SNR2A2=
4
α SNR2 , (2.30)
coincidente con quanto avviene nel caso tempo-continuo trattato in [11].
Un esempio di tale approssimazione e mostrato in Fig.2.7, ottenuta per una
4−QAM, con roll-off α pari a 0.25 e 0 dB di SNR.
28
2.3. Approssimazione della DSP del rumore di fase
10−4
10−3
10−210
10.5
11
11.5
12
12.5
13
13.5
14
f T
DS
P [d
B]
Sψ,NxN(ej2πfT)
βNxN
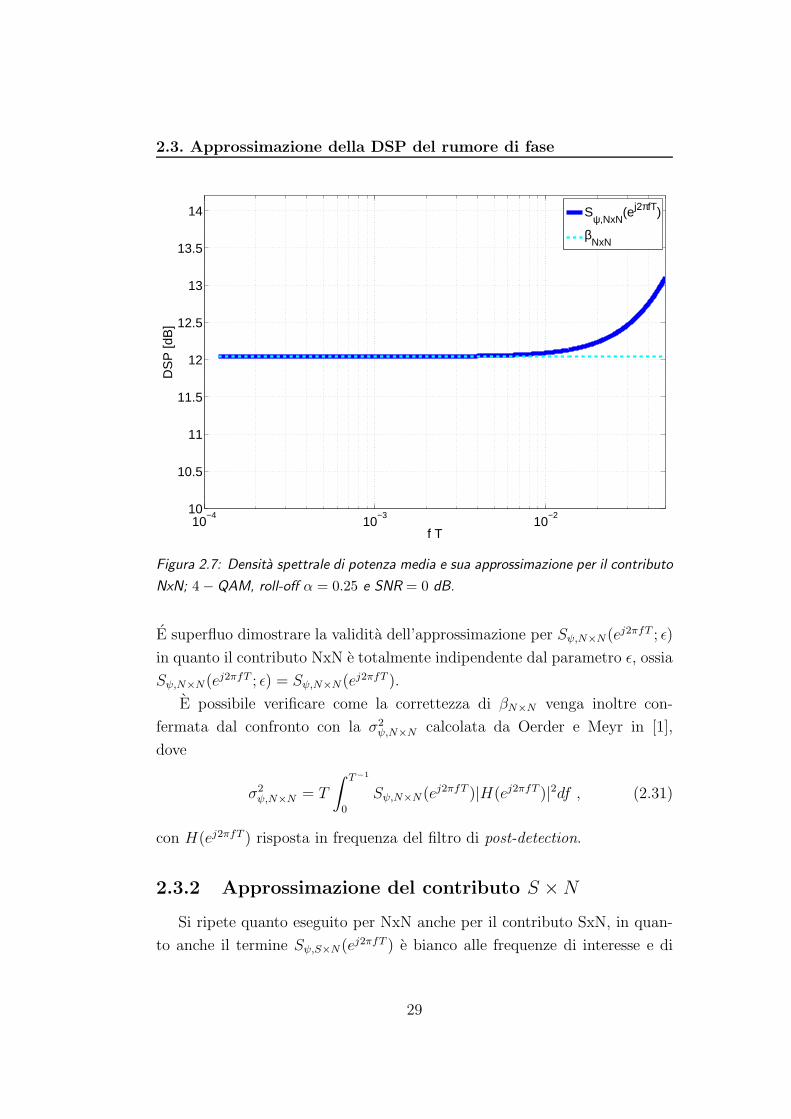
Figura 2.7: Densita spettrale di potenza media e sua approssimazione per il contributo
NxN; 4− QAM, roll-off α = 0.25 e SNR = 0 dB.
E superfluo dimostrare la validita dell’approssimazione per Sψ,N×N(ej2πfT ; ǫ)
in quanto il contributo NxN e totalmente indipendente dal parametro ǫ, ossia
Sψ,N×N(ej2πfT ; ǫ) = Sψ,N×N (e
j2πfT ).
E possibile verificare come la correttezza di βN×N venga inoltre con-
fermata dal confronto con la σ2ψ,N×N calcolata da Oerder e Meyr in [1],
dove
σ2ψ,N×N = T
∫ T−1
0
Sψ,N×N (ej2πfT )|H(ej2πfT )|2df , (2.31)
con H(ej2πfT ) risposta in frequenza del filtro di post-detection.
2.3.2 Approssimazione del contributo S ×N
Si ripete quanto eseguito per NxN anche per il contributo SxN, in quan-
to anche il termine Sψ,S×N(ej2πfT ) e bianco alle frequenze di interesse e di
29
2.3. Approssimazione della DSP del rumore di fase
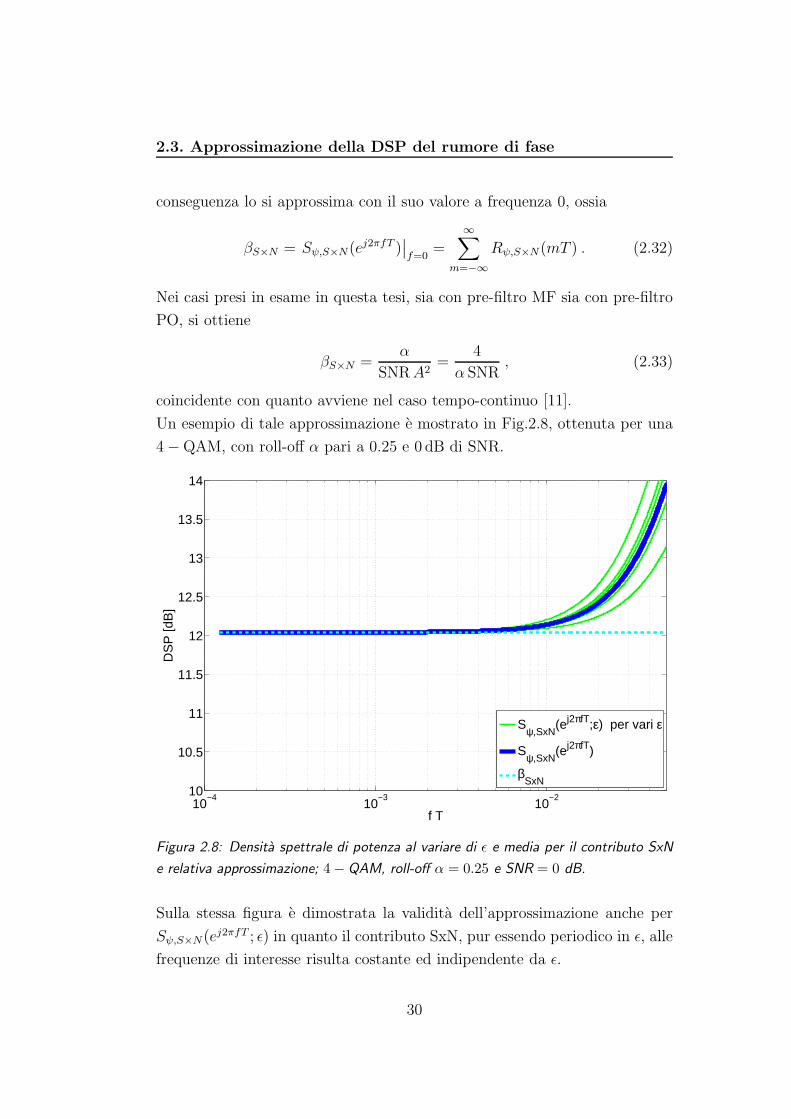
conseguenza lo si approssima con il suo valore a frequenza 0, ossia
βS×N = Sψ,S×N(ej2πfT )
∣∣f=0
=∞∑
m=−∞
Rψ,S×N(mT ) . (2.32)
Nei casi presi in esame in questa tesi, sia con pre-filtro MF sia con pre-filtro
PO, si ottiene
βS×N =α
SNRA2=
4
α SNR, (2.33)
coincidente con quanto avviene nel caso tempo-continuo [11].
Un esempio di tale approssimazione e mostrato in Fig.2.8, ottenuta per una
4−QAM, con roll-off α pari a 0.25 e 0 dB di SNR.
10−4
10−3
10−210
10.5
11
11.5
12
12.5
13
13.5
14
f T
DS
P [d
B]
Sψ,SxN(ej2πfT;ε) per vari ε
Sψ,SxN(ej2πfT)
βSxN
Figura 2.8: Densita spettrale di potenza al variare di ǫ e media per il contributo SxN
e relativa approssimazione; 4− QAM, roll-off α = 0.25 e SNR = 0 dB.
Sulla stessa figura e dimostrata la validita dell’approssimazione anche per
Sψ,S×N(ej2πfT ; ǫ) in quanto il contributo SxN, pur essendo periodico in ǫ, alle
frequenze di interesse risulta costante ed indipendente da ǫ.
30
2.3. Approssimazione della DSP del rumore di fase
Analogamente al contributo NxN, anche la correttezza di βS×N viene
confermata dal confronto con la σ2ψ,S×N calcolata da Oerder e Meyr in [1],
dove
σ2ψ,S×N = T
∫ T−1
0
Sψ,S×N(ej2πfT )|H(ej2πfT )|2df . (2.34)
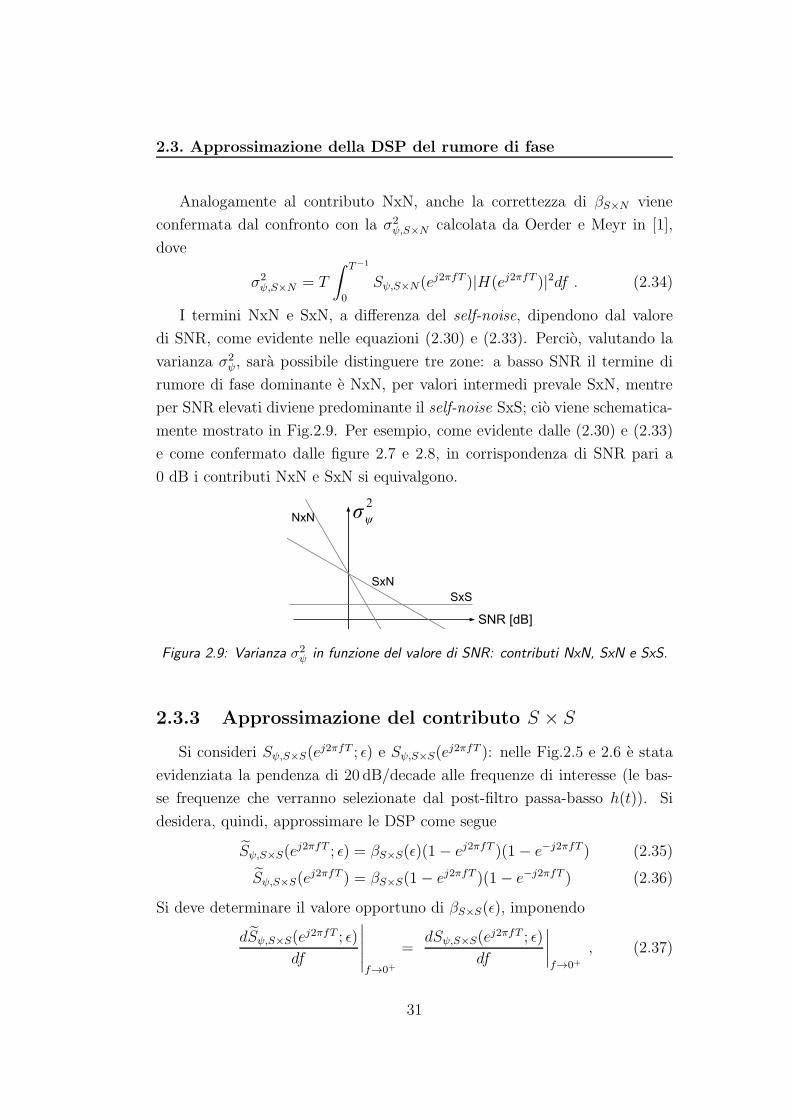
I termini NxN e SxN, a differenza del self-noise, dipendono dal valore
di SNR, come evidente nelle equazioni (2.30) e (2.33). Percio, valutando la
varianza σ2ψ, sara possibile distinguere tre zone: a basso SNR il termine di
rumore di fase dominante e NxN, per valori intermedi prevale SxN, mentre
per SNR elevati diviene predominante il self-noise SxS; cio viene schematica-
mente mostrato in Fig.2.9. Per esempio, come evidente dalle (2.30) e (2.33)
e come confermato dalle figure 2.7 e 2.8, in corrispondenza di SNR pari a
0 dB i contributi NxN e SxN si equivalgono.
Figura 2.9: Varianza σ2ψ in funzione del valore di SNR: contributi NxN, SxN e SxS.
2.3.3 Approssimazione del contributo S × S
Si consideri Sψ,S×S(ej2πfT ; ǫ) e Sψ,S×S(e
j2πfT ): nelle Fig.2.5 e 2.6 e stata
evidenziata la pendenza di 20 dB/decade alle frequenze di interesse (le bas-
se frequenze che verranno selezionate dal post-filtro passa-basso h(t)). Si
desidera, quindi, approssimare le DSP come segue
Sψ,S×S(ej2πfT ; ǫ) = βS×S(ǫ)(1− ej2πfT )(1− e−j2πfT ) (2.35)
Sψ,S×S(ej2πfT ) = βS×S(1− ej2πfT )(1− e−j2πfT ) (2.36)
Si deve determinare il valore opportuno di βS×S(ǫ), imponendo
dSψ,S×S(ej2πfT ; ǫ)
df
∣∣∣∣∣f→0+
=dSψ,S×S(e
j2πfT ; ǫ)
df
∣∣∣∣f→0+
, (2.37)
31

2.3. Approssimazione della DSP del rumore di fase
e analogamente per βS×S. Si ottiene quindi
βS×S(ǫ) = −1
2
∞∑
m=−∞
m2Rψ,S×S(mT ; ǫ) (2.38)
βS×S = −1
2
∞∑
m=−∞
m2Rψ,S×S(mT ) . (2.39)
Per il calcolo dei termini Rψ,S×S(mT ; ǫ) e Rψ,S×S(mT ) si rimanda all’Appen-
dice B.
Si sottolinea come l’analisi effettuata confermi l’indipendenza del contributo
di self-noise dal valore di SNR.
La bonta dell’approssimazione introdotta viene mostrata nella Fig.2.10, ot-
tenuta per una 4−QAM, con roll-off α pari a 0.25.
10−4
10−3
10−2
10−1
100
−50
−40
−30
−20
−10
0
10
20
f T
DS
P [
dB]
MF Sψ,SxS(ej2πfT)
MF approssimazione con βSxS
PO Sψ,SxS(ej2πfT)
PO approssimazione con βSxS
Figura 2.10: Densita spettrale di potenza media e sua approssimazione per il contributo
SxS; 4− QAM, roll-off α = 0.25 e pre-filtri MF e PO.
In figura si vede come tale approssimazione sia buona alle basse frequen-
ze, ma non altrettanto alle alte, soprattutto nel caso di PO. Tuttavia, si
32

2.3. Approssimazione della DSP del rumore di fase
ricorda, sono le basse frequenze quelle che verranno selezionate dal post-
filtro passa-basso, mentre le alte risulteranno fortemente attenuate, pertanto
l’approssimazione introdotta e adeguata per lo scopo della tesi.
Per completezza si desidera mostrare la validita dell’approssimazione in-
trodotta anche per diversi valori di roll-off.
A tal scopo si consideri la Fig.2.11, ottenuta sempre per una 4−QAM, con il
solo pre-filtro adattato MF, e variando il valore di α. Si nota come il self-noise
sia minore per α grandi, in corrispondenza dei quali le oscillazioni di v(t) si
smorzano piu velocemente. Inoltre, per roll-off grandi, l’approssimazione
stessa risulta maggiormente robusta anche alle alte frequenze.
10−4
10−3
10−2
10−1
−60
−50
−40
−30
−20
−10
0
10
20
f T
DS
P [d
B]
α = 0.25 Sψ,SxS(ej2πfT)
α = 0.50 Sψ,SxS(ej2πfT)
α = 0.75 Sψ,SxS(ej2πfT)
α = 0.25 approx con βSxS
α = 0.50 approx con βSxS
α = 0.75 approx con βSxS
Figura 2.11: Densita spettrale di potenza media e sua approssimazione per il contributo
SxS, per diversi valori di roll-off α; 4− QAM e pre-filtro MF.
In Fig.2.12 e riportato invece il valore βSxS dell’equazione (2.39) al variare
del roll-off α, mostrato sia nel caso di pre-filtro adattato MF, sia nel caso di
pre-filtro ottimizzato PO, per una M −QAM con M pari a 4 e 256.
Ancora e evidente come il pre-filtro PO dia luogo a minore self-noise e come,
per entrambi i pre-filtri, valori grandi di roll-off riducano il contributo SxS.
33

2.3. Approssimazione della DSP del rumore di fase
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−15
−12.5−10−7.5
−5−2.5
02.5
57.510
12.515
17.520
22.525
27.530
32.535
α
β SxS
(α)
[dB
]
MF 4−QAMPO 4−QAMMF 256−QAMPO 256−QAM
Figura 2.12: Valore di βSxS al variare del roll-off α; {4, 256} −QAM e pre-filtri MF e
PO.
Per confronto, oltre al 4 − QAM , e riportato anche il caso di 256 − QAM ,
per evidenziare come giustamente il contributo SxS cresca all’aumentare di
M .
34
Capitolo 3
Progettazione del post-filtro nel
sincronizzatore di simbolo di
Oerder&Meyr
In questo capitolo si introduce la tempo-varianza sul rumore di fase, allo
scopo di rappresentare meglio quanto accade nei sistemi di comunicazione
reali. Si procede quindi con la progettazione del filtro di post-detection per il
sincronizzatore di simbolo di Oerder e Meyr. Si ricava dapprima il post-filtro
ottimo, basandosi sulla teoria di Wiener. Si valutano in seguito le soluzioni
sub-ottime offerte dai filtri a singola e doppia media mobile, la cui durata
viene ottimizzata secondo tecniche differenti, al fine di ottenere prestazioni
prossime alle ottime con il vantaggio di una minore complessita realizzativa.
3.1 Rumore di fase tempo-variante
Nell’analisi svolta sino ad ora il ritardo ǫ, responsabile di un campiona-
mento in ricezione negli istanti non ottimali, e stato mantenuto costante nel
tempo. Tale ritardo, si ricorda, e dovuto agli oscillatori locali in trasmissione
e ricezione e all’eventuale ritardo di canale. Nei sistemi di comunicazione
reali tale disturbo ovviamente non e costante nel tempo, pertanto nel seguito
si considera ǫ(t), il quale da luogo ad un rumore di fase tempo-variante θ(t)
pari a 2πǫ(t)/T .
35

3.1. Rumore di fase tempo-variante
Nello specifico, si assume rumore di fase di Wiener (o random phase walk),
percio il modello tempo-discreto per tale rumore di fase, a valle dell’opera-
zione di unwrap, e
θk = θk−1 + γuk , (3.1)
con {uk} rumore gaussiano e bianco, a media nulla e varianza unitaria. Il
parametro γ e invece uno scalare e rappresenta il passo del random walk. Il
valore di γ e anche un indicatore relativo alla bonta degli oscillatori: oscil-
latori di buona qualita sono modellizzabili tramite un valore minore di γ;
nel proseguo si e assunto γ pari a 4 · 10−6, valore adeguato a rappresentare i
peggiori oscillatori in commercio.
La densita spettrale di potenza del rumore di fase di Wiener tempo-discreto
risulta essere
Sθ(ej2πfT ) =
γ2
(1− ej2πfT )(1− e−j2πfT ), (3.2)
avente pendenza −20 dB/decade. Si precisa che la (3.2) e lo spettro del
modello definito nella (3.1), ossia una fase a valle di un’operazione di unwrap,
pertanto non e un errore da un punto di vista concettuale la potenza infinita
che il processo esibisce, poiche appunto non si tratta di un’ampiezza, bensı di
un angolo. Si puo dimostrare che lo spettro dell’esponenziale tempo-continua
ejθ(t) e una funzione Lorentziana del tipo
L(f) = 4γ2T
16π2f 2T 2 + γ4, (3.3)
caratterizzata dalla frequenza a −3 dB pari a
f−3 =γ2
4πT, (3.4)
la quale ovviamente non tende all’infinito per f → 0. Per frequenze superiori
a f−3 la funzione Lorentziana appena descritta ha pendenza di−20 dB/decade
ed e ben approssimata dalla DSP Sθ(ej2πfT ) della fase a valle dell’operazione
di unwrap; cio viene mostrato in Fig.3.1 per γ2 pari a 4 · 10−6.
Il ritardo tempo-variante ǫk porta ad avere contributi di rumore di fase a
valle del TED di Oerder e Meyr (O&M) essi stessi tempo-varianti, nelle tre
36

3.2. Post-filtro ottimo Hottimo(ej2πfT )
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
−60
−40
−20
0
20
40
60
80
f T
DS
P [d
B]
Lorentzianaapprossimata
Figura 3.1: Spettro Lorentziano e sua approssimazione come Sθ(ej2πfT ), con γ2 pari
a 4 · 10−6
componenti NxN, SxN e SxS. Sebbene l’analisi svolta nel precedente capitolo
fosse per ǫ costante, nelle equazioni (2.25) e (2.26) e stata eseguita l’opera-
zione di media assumendo densita di probabilita ddp(ǫ) uniforme e, pertanto,
la tempo-varianza e stata in tal modo recuperata in modo adeguato.
3.2 Post-filtro ottimo Hottimo(ej2πfT )
A valle del TED di Oerder e Meyr (O&M) e necessario un filtro passa-
basso per estrarre la stima della fase con cui ricampionare il segnale ricevuto
negli istanti ottimali. E importante, quindi, che la stima effettuata sia la piu
accurata possibile, percio si desidera progettare il post-filtro ottimo, ossia
quello che minimizza l’errore quadratico medio della stima. Si precisa che la
progettazione del filtro ottimo e possibile solo grazie al fatto che in questa tesi
tutte le componenti di rumore in ingresso al post-filtro siano state studiate
in modo adeguato; l’assenza in letteratura di un’analisi completa relativa al
termine di self-noise spiega la mancanza dello studio di un post-filtro ottimo.
L’obiettivo del post-filtro passa-basso, quindi, e stimare θk. Da un punto
di vista spettrale, la sua risposta in frequenza deve essere tale da eliminare
37
3.2. Post-filtro ottimo Hottimo(ej2πfT )
il piu possibile il rumore, andando invece ad inseguire il termine di fase θ.
Pertanto Hottimo(ej2πfT ) dovra soddisfare un compromesso tra rumore non
attenuato alle basse frequenze (in banda di transizione) e parte utile tagliata
alle alte frequenze (banda attenuata), in modo tale che l’errore quadratico
medio, dovuto a queste due differenti cause, venga minimizzato.
Utilizzando per comodita il dominio z, ed indicando quindi X(z) per
X(ej2πfT ), la densita spettrale della fase θ puo essere riscritta come
Sθ(z) =γ2
(1− z)(1 − z−1)(3.5)
e rappresenta la parte utile per stimare θk, da cui estrarre ǫk, per poter quindi
correggere l’errore di campionamento ed ottenere cosı un ricampionamento
del segnale ricevuto negli istanti ottimali.
La densita spettrale di potenza del rumore e invece
Sψ(z) ≃ βN×N + βS×N + βS×S(1− z)(1− z−1) . (3.6)
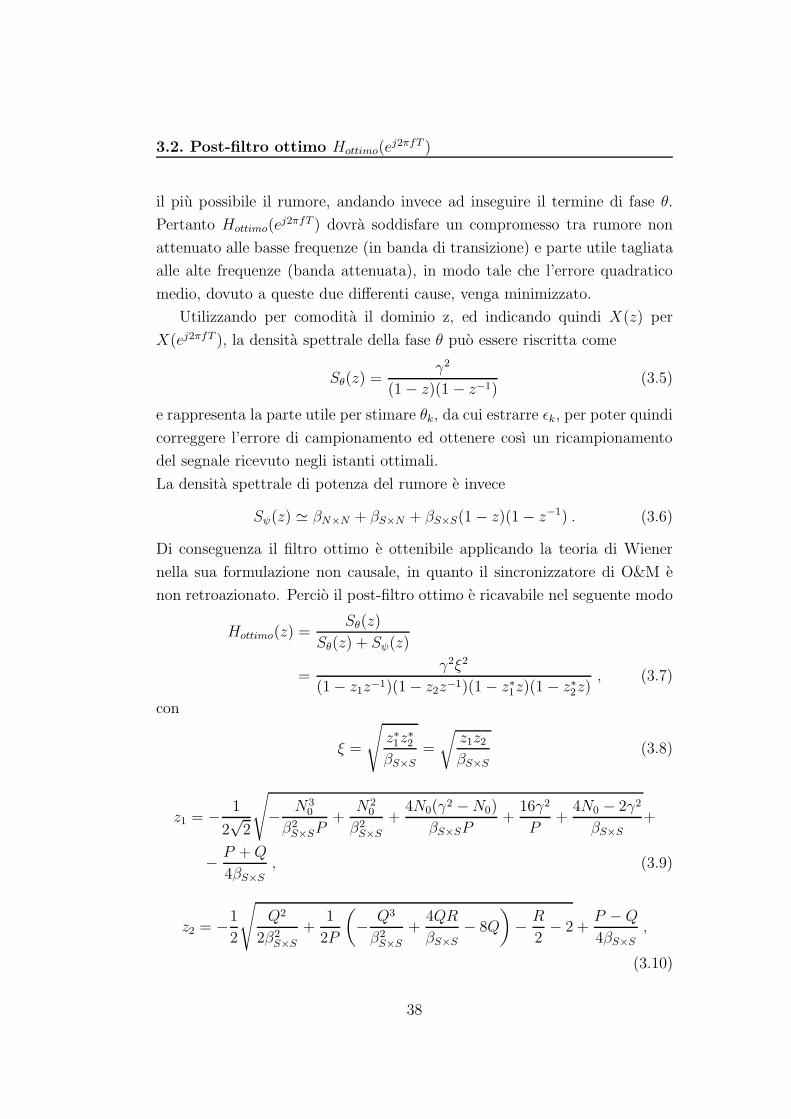
Di conseguenza il filtro ottimo e ottenibile applicando la teoria di Wiener
nella sua formulazione non causale, in quanto il sincronizzatore di O&M e
non retroazionato. Percio il post-filtro ottimo e ricavabile nel seguente modo
Hottimo(z) =Sθ(z)
Sθ(z) + Sψ(z)
=γ2ξ2
(1− z1z−1)(1− z2z−1)(1− z∗1z)(1− z∗2z), (3.7)
con
ξ =
√z∗1z
∗2
βS×S=
√z1z2βS×S
(3.8)
z1 = − 1
2√2
√− N3
0
β2S×SP
+N2
0
β2S×S
+4N0(γ2 −N0)
βS×SP+
16γ2
P+
4N0 − 2γ2
βS×S+
− P +Q
4βS×S, (3.9)
z2 = −1
2
√Q2
2β2S×S
+1
2P
(− Q3
β2S×S
+4QR
βS×S− 8Q
)− R
2− 2 +
P −Q
4βS×S,
(3.10)
38

3.2. Post-filtro ottimo Hottimo(ej2πfT )
dove N0 = βN×N + βS×N , P =√N2
0 − 4βS×Sγ2, Q = −4βS×S − N0 e R =
6βS×S + γ2+2N0. Si precisa che per il calcolo di Hottimo(z) e stata utilizzata
l’approssimazione (2.28), da cui e stata ottenuta la (3.6). La derivazione
completa di Hottimo(z) puo essere trovata in Appendice C.
La varianza dell’errore di fase, a valle del post-filtro ottimo, e
σ2ψ = T
∫ T−1
0
Sψ(ej2πfT ) |Hottimo(e
j2πfT )|2df +
+ T
∫ T−1
0
Sθ(ej2πfT ) |1−Hottimo(e
j2πfT )|2 df , (3.11)
dove il primo contributo e dovuto al rumore nella banda di transizione del
post-filtro, mentre il secondo e causato dalle alte frequenze di Sθ(ej2πfT ) che
vengono tagliate nella banda di attenuazione.
Per meglio chiarire questo compromesso tra rumore non attenuato alle
basse frequenze e parte utile tagliata alle alte, si riportano due esempi in
Fig.3.2, ottenuti per una 4−QAM, con roll-off α pari a 0.25 e con pre-filtro
adattato (MF).
10−4
10−3
10−2
10−1
100
−160
−140
−120
−100
−80
−60
−40
−20
0
20
f T
DS
P [d
B]
SNR = 20 dB
10−4
10−3
10−2
10−1
100
−160
−140
−120
−100
−80
−60
−40
−20
0
20
f T
SNR = 50 dB
| Hottimo
(ej2πfT) |2
Sψ(ej2πfT)
Sθ(ej2πfT)
Figura 3.2: Risposta in frequenza del post-filtro ottimo, realizzato per SNR = {20,50}dB; 4− QAM, roll-off α = 0.25 e pre-filtro MF.
39
3.2. Post-filtro ottimo Hottimo(ej2πfT )
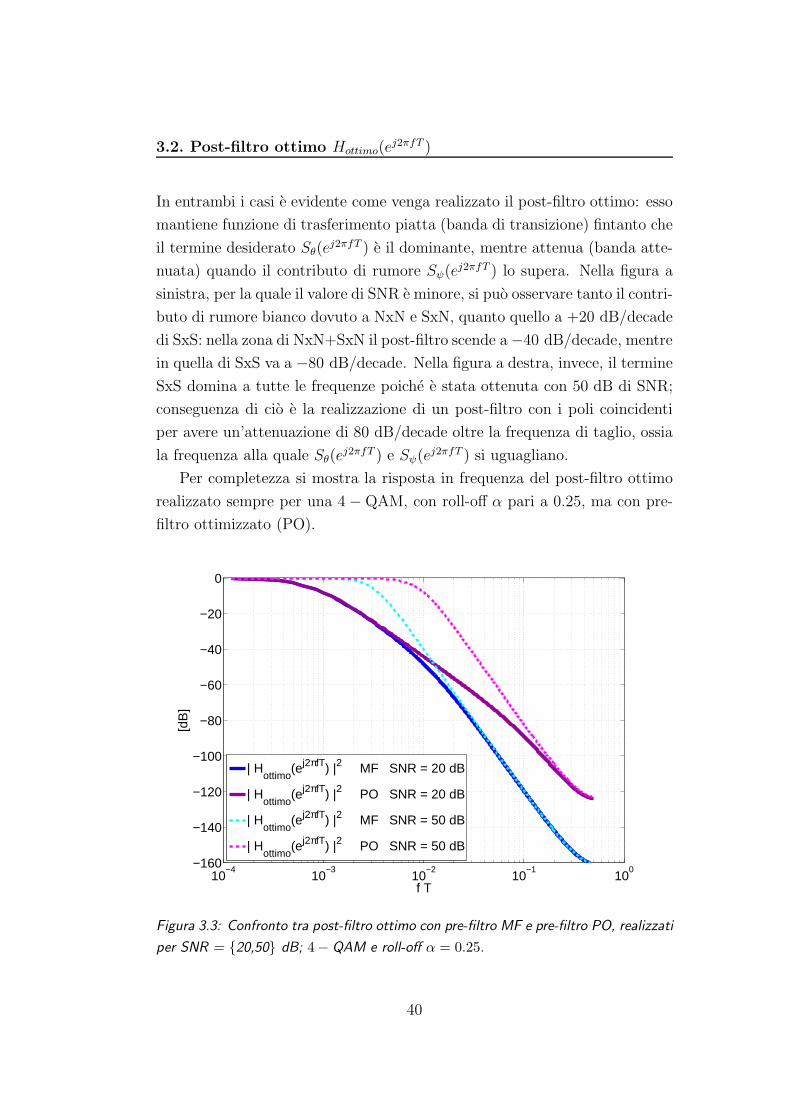
In entrambi i casi e evidente come venga realizzato il post-filtro ottimo: esso
mantiene funzione di trasferimento piatta (banda di transizione) fintanto che
il termine desiderato Sθ(ej2πfT ) e il dominante, mentre attenua (banda atte-
nuata) quando il contributo di rumore Sψ(ej2πfT ) lo supera. Nella figura a
sinistra, per la quale il valore di SNR e minore, si puo osservare tanto il contri-
buto di rumore bianco dovuto a NxN e SxN, quanto quello a +20 dB/decade
di SxS: nella zona di NxN+SxN il post-filtro scende a−40 dB/decade, mentre
in quella di SxS va a −80 dB/decade. Nella figura a destra, invece, il termine
SxS domina a tutte le frequenze poiche e stata ottenuta con 50 dB di SNR;
conseguenza di cio e la realizzazione di un post-filtro con i poli coincidenti
per avere un’attenuazione di 80 dB/decade oltre la frequenza di taglio, ossia
la frequenza alla quale Sθ(ej2πfT ) e Sψ(e
j2πfT ) si uguagliano.
Per completezza si mostra la risposta in frequenza del post-filtro ottimo
realizzato sempre per una 4 − QAM, con roll-off α pari a 0.25, ma con pre-
filtro ottimizzato (PO).
10−4
10−3
10−2
10−1
100−160
−140
−120
−100
−80
−60
−40
−20
0
f T
[dB
]
| Hottimo
(ej2πfT) |2 MF SNR = 20 dB
| Hottimo
(ej2πfT) |2 PO SNR = 20 dB
| Hottimo
(ej2πfT) |2 MF SNR = 50 dB
| Hottimo
(ej2πfT) |2 PO SNR = 50 dB
Figura 3.3: Confronto tra post-filtro ottimo con pre-filtro MF e pre-filtro PO, realizzati
per SNR = {20,50} dB; 4− QAM e roll-off α = 0.25.
40

3.2. Post-filtro ottimo Hottimo(ej2πfT )
In Fig.3.3 sono messe a confronto le risposte in frequenza dei filtri ottimi
quando i pre-filtri sono MF e PO, per SNR pari a 20 e 50 dB. Nella banda di
frequenze in cui il termine di rumore dominante e il self-noise per il caso MF,
i post-filtri appaiono giustamente diversi, in quanto nel caso di PO il termine
SxS e stato almeno parzialmente eliminato. Tale differenza e particolarmente
evidente ad alto SNR, quando la componente di self-noise domina a tutte le
frequenze nel caso di MF, come mostrato gia in Fig.3.2,
3.2.1 Valutazioni su post-filtro ottimo e sub-ottimo
In letteratura, come detto, non e presente il calcolo del post-filtro ot-
timo in quanto non e altresı presente un’analisi completa del termine di
self-noise (SxS). Occorre spiegare le motivazioni per le quali non e stato rea-
lizzato precedentemente un studio piu approfondito volto alla progettazione
del post-filtro ottimo, o quantomeno il motivo per cui tale filtro non sia stato
utilizzato. La ragione risiede nel fatto che in letteratura si utilizza solita-
mente un post-filtro sub-ottimo a singola o doppia media mobile, realizzato
trascurando la presenza del self-noise, il quale fornisce prestazioni ovviamen-
te inferiori rispetto al post-filtro ottimo, ma la cui complessita realizzativa e
molto piu bassa. Ai valori di SNR di interesse il peggioramento rispetto al
post-filtro ottimo e limitato.
Implementare il post-filtro ottimo come FIR, con risposta all’impulso pari
attorno all’origine e traslata in modo opportuno per renderla causale, risulta
computazionalmente non efficiente da un punto di vista di risorse hardware.
Si potrebbe progettare un’implementazione efficiente, ma la sua realizzazio-
ne non e immediata poiche la risposta all’impulso e, appunto, una funzione
esponenziale decrescente two-sided, con durata elevata, e necessita quindi lo
studio di un’implementazione opportuna con un’accurata gestione dei ritar-
di. L’utilizzo di filtri sub-ottimi, come si mostrera in seguito, permette di
raggiungere prestazioni prossime alle ottime, con il vantaggio di una com-
plessita realizzativa inferiore a quella richiesta per il filtro ottimo. Pertanto
non appare necessario utilizzare il filtro di post-detection ottimo, perlomeno
per lo scopo di questa tesi.
Si desidera, quindi, partire dal filtro ottimo progettato per procedere
41
3.3. Ottimizzazione del post-filtro a singola e doppia media mobile
all’ottimizzazione dei post-filtri a singola e doppia media mobile (MA), di-
mensionandoli in modo opportuno grazie all’analisi eseguita su tutte le com-
ponenti di rumore di fase. Il filtro ottimo viene utilizzato come termine di
paragone per valutare la bonta delle soluzioni sub-ottime proposte.
Inoltre si sottolinea la possibilita di dimostrare che, come supposto ed
anticipato, il miglioramento offerto dal filtro ottimo rispetto ai sub-ottimi e
molto piccolo ai valori di SNR di interesse. Pertanto l’utilizzo del post-filtro
ottimo risulta ragionevole solo in circostanze specifiche, tipicamente in casi
in cui il valore di SNR e molto alto e siano richieste prestazioni ottimali del
sincronizzatore, anche a costo di una complessita realizzativa maggiore. In
tutti gli altri casi i post-filtri sub-ottimi, ottimizzati come mostrato nella
sezione seguente, risulteranno invece adeguati. L’analisi delle prestazioni,
che conferma quanto qui anticipato, viene riportata nel quinto capitolo.
3.3 Ottimizzazione del post-filtro a singola e
doppia media mobile
L’utilizzo di un filtro sub-ottimo a singola o doppia media mobile otti-
mizzato risulta la scelta migliore nella maggioranza dei casi, in quanto esso
appare un buon compromesso tra prestazioni e complessita.
Nei paragrafi seguenti si riportano due possibili modalita per ottimizzare i
filtri MA: eguagliando la loro banda equivalente di rumore con quella del
post-filtro ottimo o procedendo empiricamente.
Prima di proseguire, tuttavia, si desidera argomentare quanto affermato
circa la possibilita di un’implementazione efficiente dei filtri sub-ottimi a
media mobile.
Si consideri, per esempio, la singola media mobile, avente risposta all’impulso
rettangolare pari a
h1MA(t) =
{1/D |t| ≤ D/2
0 altrove. (3.12)
L’operazione di media mobile effettua, appunto, la media, ossia somma D va-
lori in ingresso e li divide per D. Tuttavia, per D elevato, questa operazione
42

3.3. Ottimizzazione del post-filtro a singola e doppia media mobile
diviene onerosa se non implementata in modo efficiente. Per ovviare a tale
problema si realizza uno schema ricorsivo per effettuare la media, in modo
tale da riutilizzare le somme gia eseguite: ad ogni passo viene sottratto il ter-
mine uscente dalla finestra di calcolo e viene, invece, aggiunto quello entrante.
Cio e mostrato in Fig.3.4 e puo essere formalizzato nel modo seguente:
out[k] = out[k − 1] +in[k]− in[k −D]
D, (3.13)
dove out[k] e il k-esimo campione in uscita dal post-filtro a singola media
mobile, in[k] il k-esimo campione in ingresso.
Figura 3.4: Schema a blocchi del filtraggio a singola media mobile implementato in
modo ricorsivo.
3.3.1 Ottimizzazione tramite uguaglianza tra bande di
rumore
Avendo calcolato il post-filtro ottimo Hottimo(ej2πfT ) e possibile sfruttare
tale conoscenza per dimensionare i post-filtri sub-ottimi a singola o dop-
pia media mobile. Come illustrato nella sezione precedente, dimensionare
in modo opportuno la larghezza della banda di transizione e fondamentale
per ottenere buone prestazioni del sincronizzatore. L’idea, quindi, e quella
di imporre che i post-filtri sub-ottimi abbiano la stessa banda equivalente di
rumore del filtro ottimo, in quanto quest’ultimo soddisfa al meglio il com-
promesso tra rumore non attenuato alle basse frequenze e parte utile tagliata
alle alte.
La banda equivalente di rumore di un filtro e definita come la banda del
filtro ideale passa-basso che, data la potenza in entrata Pin in entrambi i
filtri, fornisce la stessa potenza in uscita Pout.
43

3.3. Ottimizzazione del post-filtro a singola e doppia media mobile
Pertanto la banda equivalente di rumore unilatera del filtro ottimo risulta
Beq,Hott=
1
2|Hottimo(1)|2∫ T−1
0
|Hottimo(ej2πfT )|2df
=1
2
∫ T−1
0
|Hottimo(ej2πfT )|2df . (3.14)
La banda equivalente di rumore unilatera di un filtro a singola media mobile
e
Beq,1MA =1
2DBeq,1MA, (3.15)
mentre quella unilatera di un filtro a doppia media mobile risulta
Beq,2MA =1
3DBeq,2MA
, (3.16)
con DBeq,1MA e DBeq,2MA durata dei filtri rettangolari nel tempo.
L’ottimizzazione realizzata tramite uguaglianza delle bande normalizza-
te di rumore e sicuramente un metodo semplice e veloce per dimensionare
i post-filtri a singola e doppia media mobile, tuttavia non garantisce l’ot-
tenimento delle prestazioni migliori possibili. Infatti questa prima tecnica
di ottimizzazione, sebbene sia efficace per il post-filtro a doppia media mo-
bile, non risulta adeguata per la singola media mobile quando il valore di
SNR e medio-alto; cio viene mostrato nel paragrafo 3.3.3 e confermato dalle
simulazioni, i cui risultati sono riportati nel quinto capitolo.
3.3.2 Ottimizzazione tramite ricerca empirica
La seconda modalita di ottimizzazione proposta consiste nella ricerca
empirica del dimensionamento opportuno dei filtri MA, valutando quindi
quale durata Demp,1MA e Demp,2MA dei filtri sia da preferire. Cio puo essere
formulato come segue
Demp,1MA = argminD
{σ2ψ,1MA(D)} (3.17)
Demp,2MA = argminD
{σ2ψ,2MA(D)} . (3.18)
44

3.3. Ottimizzazione del post-filtro a singola e doppia media mobile
Questa tecnica ha il vantaggio di garantire l’ottenimento delle migliori pre-
stazioni raggiungibili tramite filtri sub-ottimi. Il costo risiede nel fatto che
e necessario eseguire la ricerca della dimensione ottima Demp, considerando
tutte le lunghezze D possibili, per ogni valore di SNR; e tuttavia possibile,
ma non immediato, cercare una scrittura in forma chiusa di σ2ψ in funzione di
D e selezionare, quindi, Demp cercando lo zero della derivata della varianza.
Si precisa che, in realta, la ricerca empirica permette di raggiungere le pre-
stazioni migliori possibili per i filtri MA solo se nelle (3.17) e (3.18) viene
calcolata la varianza σ2ψ senza introdurre approssimazione alcuna. In que-
sta tesi, tuttavia, viene sempre utilizzata l’equazione approssimata (2.28); si
valutano nel paragrafo seguente le conseguenze di tale scelta.
35 40 45 50 55 602.5
2.6
2.7
2.8
2.9
3
3.1
3.2
3.3
3.4
3.5x 10−5
D/T
PO
120 130 140 150 1607
7.1
7.2
7.3
7.4
7.5
7.6
7.7
7.8
7.9
88x 10−5
D/T
σ2 ψ
MF
2MA (per vari D)2MA (emp)2MA (Beq)ottimo
Figura 3.5: Ottimizzazione empirica del post-filtro a doppia media mobile con pre-filtri
MF e PO; 4− QAM, roll-off α = 0.25 e SNR = 50 dB.
In Fig.3.5 si riporta un esempio di ottimizzazione tramite ricerca empirica,
eseguita per il post-filtro a doppia media mobile, per una 4 − QAM, con
roll-off 0.25, SNR di 50 dB, sia con pre-filtro adattato MF, sia con quello
ottimizzato PO. In figura si riportano, per confronto, anche i valori delle
45

3.3. Ottimizzazione del post-filtro a singola e doppia media mobile
σ2ψ ottenute tramite post-filtro ottimo ed attraverso la precedente tecnica di
ottimizzazione.
Nel paragrafo seguente verranno mostrati e discussi gli effetti di questa
seconda modalita di ottimizzazione.
3.3.3 Effetti dell’ottimizzazione
In Fig.3.6 sono mostrate le risposte in frequenza del post-filtro ottimo e
dei post-filtri a singola e doppia media mobile, ottimizzati con le due tecni-
che presentate nei paragrafi precedenti. La figura e stata ottenuta per una
4−QAM, con roll-off pari a 0.25, con SNR di 50 dB e con pre-filtro adattato
MF.
10−4
10−3
10−2
10−1−160
−140
−120
−100
−80
−60
−40
−20
0
Equivalenza tra Beq
(SNR = 50 dB)
f T
[dB
]
10−4
10−3
10−2
10−1−160
−140
−120
−100
−80
−60
−40
−20
0
Ricerca empirica(SNR = 50 dB)
f T
| H1MA
(ej2πfT) |2
| H2MA
(ej2πfT) |2
| Hottimo
(ej2πfT) |2
Figura 3.6: Esempio di ottimizzazione dei post-filtri a singola e doppia MA, tramite le
due tecniche discusse; 4− QAM, roll-off α = 0.25 e pre-filtro MF.
Per il caso considerato in figura, l’ottimizzazione del filtro a doppia media
mobile tramite le due diverse modalita discusse conduce a risposte in frequen-
za simili. Non altrettanto accade per il post-filtro a singola media mobile,
46

3.3. Ottimizzazione del post-filtro a singola e doppia media mobile
per il quale, come anticipato, la prima tecnica di ottimizzazione non risulta
adeguata.
Nelle tabelle 3.1, 3.2, 3.3 e 3.4 vengono riportate, per diversi valori di
SNR, le lunghezze dei filtri a media mobile ottenute tramite le due tecniche
di ottimizzazione, sia per pre-filtro MF sia per quello PO; il riferimento e
sempre una 4 − QAM con roll-off α pari a 0.25. Inoltre nelle tabelle viene
riportato anche il confronto tra la varianza σ2ψ ottenuta a valle del post-filtro
ottimo e quelle ricavate dall’utilizzo dei post-filtri a singola e doppia media
mobile ottimizzati.
Tabella 3.1: Confronto tra le prestazioni offerte dal post-filtro ottimo e quelle offerte
dal post-filtro a doppia media mobile ottimizzato; 4 − QAM, roll-off α = 0.25 e
pre-filtro MF.
SNR [dB] DBeq σ2ψ,Beq/σ
2ψ,ott [dB] Demp σ2
ψ,emp/σ2ψ,ott [dB]
10 1769 0.1423 1713 0.1401
20 539 0.1390 520 0.1364
30 199 0.0769 193 0.0741
40 135 0.1811 145 0.1502
50 128 0.2637 141 0.1993
La tabella 3.1 mostra come le due ottimizzazioni del post-filtro a doppia
media mobile, quando il pre-filtro e quello adattato, diano risultati molto
simili; le loro prestazioni, inoltre, appaiono molto vicine a quelle del post-
filtro ottimo. Si evidenzia pero una tendenza dell’ottimizzazione empirica a
mantenere la banda leggermente piu larga di quanto indichi la prima modalita
di ottimizzazione a SNR medio-bassi, piu stretta in corrispondenza di SNR
elevati.
Le stesse osservazioni valgono anche per la tabella 3.2, ottenuta con pre-
filtro ottimizzato (PO).
Si conclude, quindi, che per il post-filtro a doppia media mobile entrambe
le tecniche di ottimizzazione sono sfruttabili, sebbene la seconda proposta
dia luogo a prestazioni migliori. Inoltre si sottolinea come, per ambedue i
pre-filtri ed entrambe le tecniche di ottimizzazione, i risultati raggiunti siano
47

3.3. Ottimizzazione del post-filtro a singola e doppia media mobile
prossimi a quelli offerti dal post-filtro ottimo, da cui si discostano mediamente
per meno di 0.2 dB.
Tabella 3.2: Confronto tra le prestazioni offerte dal post-filtro ottimo e quelle offerte
dal post-filtro a doppia media mobile ottimizzato; 4 − QAM, roll-off α = 0.25 e
pre-filtro PO.
SNR [dB] DBeq σ2ψ,Beq/σ
2ψ,ott [dB] Demp σ2
ψ,emp/σ2ψ,ott [dB]
10 1769 0.1424 1713 0.1401
20 536 0.1424 519 0.1401
30 170 0.1379 164 0.1351
40 65 0.0719 63 0.0698
50 46 0.1829 49 0.1503
Tabella 3.3: Confronto tra le prestazioni offerte dal post-filtro ottimo e quelle offerte
dal post-filtro a singola media mobile ottimizzato; 4 − QAM, roll-off α = 0.25 e
pre-filtro MF.
SNR [dB] DBeq σ2ψ,Beq/σ
2ψ,ott [dB] Demp σ2
ψ,emp/σ2ψ,ott [dB]
10 2623 0.6851 2320 0.6456
20 808 1.1978 872 1.1813
30 298 6.4310 648 3.8860
40 202 11.2157 626 5.9587
50 191 12.0545 620 6.3459
La tabella 3.3 mostra invece gli effetti delle due ottimizzazioni suggerite
quando il post-filtro e a singola media mobile ed il pre-filtro e quello adatta-
to.
Le due tecniche conducono a risultati sensibilmente diversi, soprattutto a
valori elevati di SNR, come anticipato nella sezione precedente. Il problema
e legato al fatto che l’ottimizzazione tramite uguaglianza delle bande equi-
valenti di rumore ha dei limiti di validita: essa non risulta adeguata per il
caso di post-filtro a singola media mobile poiche la risposta in frequenza di
48

3.3. Ottimizzazione del post-filtro a singola e doppia media mobile
tale filtro differisce sensibilmente da quella del post-filtro ottimo; non appa-
re pertanto sensato utilizzarla come se fosse una buona approssimazione del
post-filtro ottimo e dimensionarla di conseguenza attraverso la prima tecnica
di ottimizzazione discussa.
E inoltre presente un problema anche per quanto riguarda la singola media
mobile ottimizzata empiricamente: l’analisi teorica risulta una sovra-stima
della varianza σ2ψ a causa dell’approssimazione (3.6). Tale approssimazione
sul termine SxS, come gia sottolineato, non e buona alle alte frequenze e
cio si traduce in un degrado delle prestazioni quando il self-noise diviene il
contributo di rumore dominante, ossia ad alto SNR. Il filtro ottimo e quello
a doppia media mobile non risentono in maniera significativa della cattiva
approssimazione poiche a quelle frequenze attenuano molto; non altrettanto
accade per il post-filtro a singola media mobile. Si precisa, quindi, che le
simulazioni mostreranno prestazioni migliori di quelle qui calcolate, poiche
l’analisi risulta essere, appunto, una sovra-stima.
Tabella 3.4: Confronto tra le prestazioni offerte dal post-filtro ottimo e quelle offerte
dal post-filtro a singola media mobile ottimizzato; 4 − QAM, roll-off α = 0.25 e
pre-filtro PO.
SNR [dB] DBeq σ2ψ,Beq/σ
2ψ,ott [dB] Demp σ2
ψ,emp/σ2ψ,ott [dB]
10 2653 0.6694 2297 0.6248
20 804 0.6767 700 0.6344
30 255 0.9014 247 0.8993
40 97 3.8223 159 2.8180
50 69 7.2130 149 4.4932
Come nel caso precedente, anche la tabella 3.4 mostra come le due ot-
timizzazioni del post-filtro a singola media mobile, con pre-filtro PO, diano
luogo a risultati sensibilmente diversi, soprattutto a valori elevati di SNR. La
motivazione e analoga a quanto spiegato per il caso di pre-filtro MF: l’utiliz-
zo della prima tecnica di ottimizzazione non e adeguato, mentre la seconda
fornisce risultati sovra-stimati. Si precisa, tuttavia, che la sovra-stima sara
ancora maggiore poiche l’approssimazione e peggiore nel caso di PO, come
49
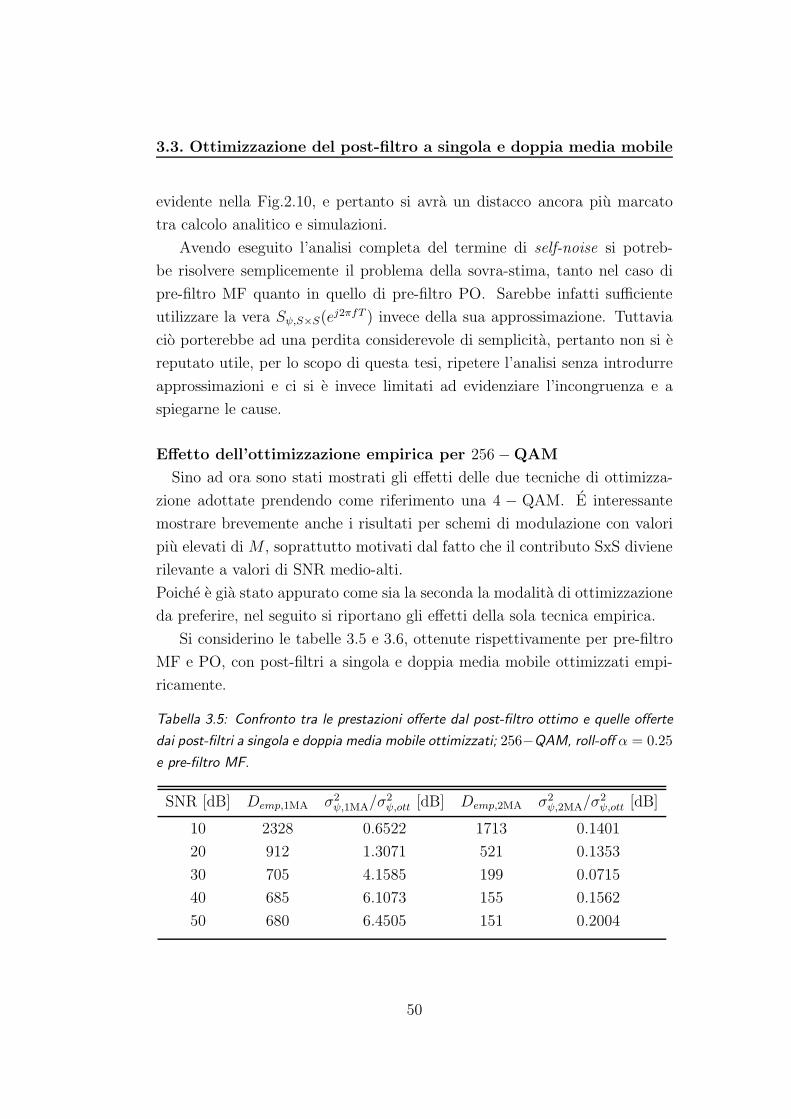
3.3. Ottimizzazione del post-filtro a singola e doppia media mobile
evidente nella Fig.2.10, e pertanto si avra un distacco ancora piu marcato
tra calcolo analitico e simulazioni.
Avendo eseguito l’analisi completa del termine di self-noise si potreb-
be risolvere semplicemente il problema della sovra-stima, tanto nel caso di
pre-filtro MF quanto in quello di pre-filtro PO. Sarebbe infatti sufficiente
utilizzare la vera Sψ,S×S(ej2πfT ) invece della sua approssimazione. Tuttavia
cio porterebbe ad una perdita considerevole di semplicita, pertanto non si e
reputato utile, per lo scopo di questa tesi, ripetere l’analisi senza introdurre
approssimazioni e ci si e invece limitati ad evidenziare l’incongruenza e a
spiegarne le cause.
Effetto dell’ottimizzazione empirica per 256−QAM
Sino ad ora sono stati mostrati gli effetti delle due tecniche di ottimizza-
zione adottate prendendo come riferimento una 4 − QAM. E interessante
mostrare brevemente anche i risultati per schemi di modulazione con valori
piu elevati di M , soprattutto motivati dal fatto che il contributo SxS diviene
rilevante a valori di SNR medio-alti.
Poiche e gia stato appurato come sia la seconda la modalita di ottimizzazione
da preferire, nel seguito si riportano gli effetti della sola tecnica empirica.
Si considerino le tabelle 3.5 e 3.6, ottenute rispettivamente per pre-filtro
MF e PO, con post-filtri a singola e doppia media mobile ottimizzati empi-
ricamente.
Tabella 3.5: Confronto tra le prestazioni offerte dal post-filtro ottimo e quelle offerte
dai post-filtri a singola e doppia media mobile ottimizzati; 256−QAM, roll-off α = 0.25
e pre-filtro MF.
SNR [dB] Demp,1MA σ2ψ,1MA/σ
2ψ,ott [dB] Demp,2MA σ2
ψ,2MA/σ2ψ,ott [dB]
10 2328 0.6522 1713 0.1401
20 912 1.3071 521 0.1353
30 705 4.1585 199 0.0715
40 685 6.1073 155 0.1562
50 680 6.4505 151 0.2004
50

3.3. Ottimizzazione del post-filtro a singola e doppia media mobile
Tabella 3.6: Confronto tra le prestazioni offerte dal post-filtro ottimo e quelle offerte
dai post-filtri a singola e doppia media mobile ottimizzati; 256−QAM, roll-off α = 0.25
e pre-filtro PO.
SNR [dB] Demp,1MA σ2ψ,1MA/σ
2ψ,ott [dB] Demp,2MA σ2
ψ,2MA/σ2ψ,ott [dB]
10 2297 0.6248 1713 0.1401
20 700 0.6352 519 0.1348
30 249 0.9179 164 0.1348
40 163 2.8811 64 0.0693
50 153 4.5318 50 0.1519
Come previsto, nel caso di pre-filtro PO, il quale attenua il termine di self-
noise, i risultati sono pressoche identici a quelli precedentemente mostrati
per il caso 4 −QAM, tanto per la singola media mobile, quanto per la dop-
pia.
Nel caso di pre-filtro MF, invece, vi sono delle lievi differenze, dovute al
fatto che il termine SxS e maggiore per M grandi, come gia evidenziato nel-
la Fig.2.12. Questo fa sı che il filtro sub-ottimo abbia banda piu stretta,
soprattutto in corrispondenza dei valori di SNR in cui il self-noise e rilevan-
te e soprattutto per la singola MA, i cui lobi laterali attenuano meno. La
differenza, tuttavia, non e sostanziale, come confermato dalle varianze σ2ψ.
51
Capitolo 4
Altri sincronizzatori dell’istante
di campionamento
In questo capitolo si svolge l’analisi del self-noise e la progettazione del post-
filtro per i sincronizzatori di simbolo di Serpedin e di Gardner, in modo
analogo a quanto fatto nei precedenti capitoli per il sincronizzatore di Oerder
e Meyr.
4.1 Sincronizzatore di Serpedin
Come spiegato nel paragrafo 1.1.4, il sincronizzatore dell’istante di cam-
pionamento di Serpedin e feedforward, ossia lavora senza retroazione, analo-
gamente a quanto avviene per il sincronizzatore di Oerder e Meyr (O&M). Lo
schema di Serpedin ha pero il vantaggio di necessitare solo di due campioni
per tempo di simbolo T , a differenza del precedente che ne richiede quattro.
Inoltre e stato mostrato come l’algoritmo di Serpedin sia un’approssimazione
di quello di O&M, pertanto appare superfluo svolgere nuovamente l’analisi
teorica del contributo di rumore di fase SxS e la progettazione del post-filtro,
poiche si giungerebbe agli stessi risultati ottenuti per O&M. Cio viene confer-
mato dalle simulazioni, riportate nel capitolo seguente. Poiche le simulazioni
sono state svolte anche per il sincronizzatore di Serpedin, appare tuttavia
opportuno mostrare lo schema a blocchi che e stato implementato ed utiliz-
zato: esso e riportato in Fig.4.1.
52

4.1. Sincronizzatore di Serpedin
Figura 4.1: Schema a blocchi del sincronizzatore di simbolo di Serpedin.
Il filtro in trasmissione g(t) e analogo a quello presentato per O&M, cosı
come il pre-filtro p(t) adattato od ottimizzato (MF o PO). Il TED e frutto
della combinazione di O&M e Gardner e fornisce in uscita
xk(ǫk) = x(kT ; ǫk) = ℜ{xk(ǫk)}+ jℑ{xk(ǫk)} , (4.1)
con
ℜ{xk(ǫk)} = |y(kT ; ǫk)|2 − |y(kT − T/2; ǫk)|2 (4.2)
ℑ{xk(ǫk)} =A
AGAℜ{y∗(kT − T/2; ǫk)(y(kT ; ǫk)− y(kT − T ; ǫk))} . (4.3)
L’ampiezza AGA e l’ampiezza media dell’uscita del TED del sincronizzatore
di Gardner e, nel caso di pre-filtro MF o PO, vale
AGA =
∣∣∣∣∣4C2
T
∫ T−1
0
e−jπβTV (β)V ∗
(1
T− β
)dβ
∣∣∣∣∣ =4 sin(πα/2)
π(4− α2), (4.4)
con C2 pari a E{|ci|2}, fattore di roll-off α e V (f) risposta in frequenza della
cascata di filtro in trasmissione e pre-filtro in ricezione. In Fig.4.1 il canale
e stato modellizzato in modo analogo a quanto fatto per O&M. Con h(t) e
stata indicata la risposta all’impulso del post-filtro e, come al solito, ψk(ǫk)
e il rumore di fase.
53

4.2. Sincronizzatore di Gardner
4.2 Sincronizzatore di Gardner
Il sincronizzatore di simbolo di Gardner e retroazionato (feedback), come
spiegato nel paragrafo 1.1.3, ed il suo schema a blocchi e riportato in Fig.4.2.
Figura 4.2: Schema a blocchi del sincronizzatore di simbolo di Gardner.
Come per il Serpedin, anche qui il filtro in trasmissione g(t) e analogo a
quello presentato per O&M, ed altrettanto lo e il pre-filtro p(t) adattato od
ottimizzato (MF o PO). Il post-filtro passa-basso dell’anello ha risposta in
frequenza L(f).
A differenza dei precedenti schemi, nel sincronizzatore di Gardner il TED
fornisce in uscita direttamente l’errore di sincronizzazione grazie alla retroa-
zione, per cui a valle del TED si ottiene
ek = x(kT ; ǫk − ǫk)
= ℜ{y∗(kT − T/2; ǫk − ǫk)(y(kT ; ǫk − ǫk)− y(kT − T ; ǫk − ǫk))}= E{ek}+ νk
= AGA sin
(2π(ǫk − ǫk)
T
)+ νk
≃ AGAρk sin (ψk) , (4.5)
dove sono state evidenziate la parte deterministica E{ek} ed il rumore casuale
νk, il quale e stato poi scomposto in ρk e ψk che costituiscono, rispettivamente,
la modulazione indesiderata di ampiezza e fase. L’ampiezza media della
sinusoide vale invece AGA, ottenibile come nella (4.4).
54

4.2. Sincronizzatore di Gardner
Il rumore di fase che si desidera caratterizzare e approssimabile come
ψk ≃ ekAGAρk
≃ ekAGA
. (4.6)
Si sottolinea che, a differenza del caso di O&M, per studiare il rumore di fase
non e necessario introdurre alcuna rotazione ej2πǫ/T poiche qui la retroazione
fa sı che i campioni in ingresso al sincronizzatore abbiano errore di fase sempre
attorno allo 0, perlomeno durante il tracking (la fase di acquisizione non
e argomento di questa tesi e, come tale, viene omessa). Per progettare il
post-filtro ottimo L(ej2πfT ) e sufficiente quindi caratterizzare l’errore di fase
tempo-variante residuo, offerto direttamente in uscita dal TED.
4.2.1 Autocorrelazione e densita spettrale di potenza
del rumore di fase
Per quanto riguarda i contributi di rumore di fase NxN e SxN, essi sono
ricavabili in maniera analoga a quanto eseguito per il sincronizzatore di O&M,
ancora approssimabili come bianchi sulla banda del post-filtro. Si ottiene
quindi
βN×N,GA = Sψ,N×N(ej2πfT )
∣∣f=0
(4.7)
βS×N,GA = Sψ,S×N(ej2πfT )
∣∣f=0
, (4.8)
i quali, nel caso di pre-filtro MF o PO, valgono
βN×N,GA =α
SNR2A2GA
(4.9)
=απ2(4− α2)2
16 sin2(πα/2)SNR2 (4.10)
≃ 4
α SNR2 (4.11)
e
βS×N,GA =α
SNRA2GA
(4.12)
=απ2(4− α2)2
16 sin2(πα/2)SNR(4.13)
≃ 4
α SNR. (4.14)
55

4.2. Sincronizzatore di Gardner
Per quanto riguarda il termine di rumore SxS (self-noise), come eviden-
ziato anche in [6], e invece necessario calcolare l’autocorrelazione
Rψ,S×S,GA(mT ) =1
A2GA
E{ek · ek+m} , (4.15)
da cui ricavare la densita spettrale di potenza del self-noise come
Sψ,S×S,GA(ej2πfT ) = Fm{Rψ,S×S,GA(mT )} ; (4.16)
la derivazione completa puo essere trovata in Appendice D.
Il rumore di fase SxS e idealmente nullo quando si utilizza il pre-filtro ottimiz-
zato PO, poiche nel Gardner tale pre-filtro riesce ad eliminare completamente
il contributo di self-noise grazie al fatto che il sistema e retroazionato e che,
quindi, i campioni in ingresso al TED siano gia stati precedentemente cor-
retti. Nel proseguo, pertanto, si fara riferimento solo al caso con pre-filtro
MF quando si parlera di contributo SxS.
Come nel caso di O&M, il termine Sψ,S×S,GA(ej2πfT ) esibisce una pendenza
di 20 dB/decade alle frequenze di interesse (le basse frequenze che verranno
selezionate dal post-filtro passa-basso), nel caso di pre-filtro adattato. Percio
si introduce l’approssimazione
Sψ,S×S,GA(ej2πfT ) = βS×S,GA(1− ej2πfT )(1− e−j2πfT ) (4.17)
e si ottiene il valore opportuno di βS×S,GA come mostrato in Appendice D, il
quale risulta
βS×S,GA =1
2A2GA
{[B v2(T/2) + C
∞∑
l=−∞
v(lT−T/2)v(lT+T/2)]+
+C∞∑
l=1
l2 [ v(lT+T/2)− v(lT−T/2) ]2}, (4.18)
dove B = 4 (A4 − 3A22) e C = 4A2
2.
In Fig.4.3 e mostrata la densita spettrale di potenza del rumore di fase
dovuto al self-noise, ottenuta per una 4 − QAM, con pre-filtro MF e per
diversi valori del roll-off α. In figura sono anche riportate le approssimazioni
del termine SxS come nella (4.17).
56

4.2. Sincronizzatore di Gardner
10−3
10−2
10−1
−70−65−60−55−50−45−40−35−30−25−20−15−10−5
05
101520
f T
Sψ
,SxS
,GA(e
j2πf
T)
[dB
]
α = 0.25 analisiα = 0.50 analisiα = 0.75 analisiα = 0.25 approxα = 0.50 approxα = 0.75 approxα = 0.25 approx (O&M)α = 0.50 approx (O&M)α = 0.75 approx (O&M)
Figura 4.3: Densita spettrale di potenza del rumore di fase SxS, per diversi valori di
roll-off α; 4− QAM e pre-filtro MF.
Come per il sincronizzatore di O&M si vede che l’approssimazione introdotta
e buona alle basse frequenze, ma non altrettanto alle alte; tuttavia ancora una
volta essa risulta adeguata poiche il post-filtro passa-bassa selezionera solo le
basse frequenze. E inoltre evidente come l’approssimazione sia migliore per
valori di roll-off piu elevati. Per tali valori di α il termine SxS ha densita
spettrale di potenza minore, a causa del fatto che si smorzano piu velocemente
le oscillazioni di v(t), cascata del filtro in trasmissione g(t) e del pre-filtro in
ricezione p(t).
In figura, per confronto, sono riportate anche le Sψ,S×S(ej2πfT ) ottenute per il
sincronizzatore di O&M e precedentemente illustrate in Fig.2.11, allo scopo di
sottolineare come la retroazione dello schema di Gardner permetta di ridurre
il self-noise.
In Fig.4.4 e riportato il valore di βS×S,GA dell’equazione (4.18) al variare del
roll-off α, mostrato per il caso di pre-filtro adattato MF, per una M −QAM
con M pari a 4 e 256.
57

4.2. Sincronizzatore di Gardner
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−60
−50
−40
−30
−20
−10
0
10
20
30
40
α
β SxS
,GA(α
) [d
B]
4−QAM256−QAM
Figura 4.4: Valore di βS×S,GA al variare del roll-off α; {4, 256}−QAM e pre-filtro MF.
Si sottolinea ancora come al crescere del roll-off il contributo di rumore dovuto
al self-noise si riduca e come, ovviamente, esso sia maggiore per valori piu
elevati di M .
4.2.2 Post-filtro
Per il sincronizzatore di Gardner e stata applicata la teoria della pre-
dizione lineare con il metodo formulato da Bode e Shannon per ricavare la
funzione di trasferimento ottima del filtro dell’anello PLL.
E necessario distinguere tra il caso di pre-filtro adattato (MF) e pre-filtro
ottimizzato (PO), poiche il secondo elimina la componente di rumore SxS,
pertanto il post-filtro ottimo L(ej2πfT ) sara differente nei due casi. La de-
rivazione del filtro ottimo per il pre-filtro ottimizzato puo essere trovata in
[12], i cui risultati vengono brevemente riassunti nel paragrafo seguente per
completezza.
Si lavora nel dominio z per comodita. La densita spettrale di potenza della
58

4.2. Sincronizzatore di Gardner
fase da stimare e la (3.5), ossia
Sθ(z) =γ2
(1− z)(1 − z−1). (4.19)
mentre quella del rumore risulta pari a
Sψ,GA(z) ≃ βN×N,GA + βS×N,GA + βS×S,GA(1− z)(1 − z−1) . (4.20)
Post-filtro ottimo con pre-filtro PO
Nel caso di utilizzo di pre-filtro ottimizzato come in [10], la densita spettrale
di potenza del rumore di fase si riduce a
Sψ,GA(z) ≃ βN×N,GA + βS×N,GA = Sψ,GA , (4.21)
poiche il pre-filtro elimina la componente di self-noise. Il post-filtro ottimo
che minimizza il valore di MSE puo essere calcolato seguendo [13], come mo-
strato in [12], trovando il filtro passa-basso del PLL con la seguente funzione
di trasferimento
Hott,GA,PO(z) =(1− zp)z
−1
1− zpz−1. (4.22)
Da esso si ricava la funzione di trasferimento comunemente definita ad anello
aperto (open-loop), ossia
LPO(z) =Hott,GA,PO(z)
1−Hott,GA,PO(z)=
(1− zp)z−1
1− z−1, (4.23)
con
zp = ζ −√ζ2 − 1 (4.24)
ζ = 1 +γ2
2Sψ,GA. (4.25)
La varianza dell’errore di fase si ottiene quindi come
σ2ψ =
γ2
1− zp. (4.26)
Il filtro LPO(ej2πfT ), ossia il filtro L(ej2πfT ) di Fig.4.2, viene implementato
in modo efficiente come illustrato in Fig.4.5.
59

4.2. Sincronizzatore di Gardner
Figura 4.5: Schema a blocchi dell’implementazione di LPO(f) nel sincronizzatore di
Gardner.
Post-filtro ottimo con pre-filtro MF
Nel caso di utilizzo di pre-filtro adattato (MF) la densita spettrale di potenza
del rumore di fase e quella scritta nell’equazione (4.20) e la derivazione del
post-filtro ottimo non e presente in letteratura. Per ricavare la sua funzione
di trasferimento viene di seguito applicata la teoria della predizione lineare.
Il filtro W (z), causale e a minima fase, che sbianca la sequenza in ingresso e
ricavabile dalla fattorizzazione spettrale seguente
W (z)W ∗(z−∗) =1
Sθ(z) + Sψ,GA(z). (4.27)
Si precisa che, a differenza di O&M, il vincolo di causalita e necessario per il
sincronizzatore di Gardner, in quanto esso e retroazionato. Si calcola quindi
Sθ(z) + Sψ,GA(z) =ξ−2(1− z1z
−1)(1− z2z−1)(1− z∗1z)(1− z∗2z)
(1− z−1)(1− z)(4.28)
dove
ξ =
√z∗1z
∗2
β=
√z1z2β
(4.29)
z1 = − 1
2√2
√− N3
0
β2P+N2
0
β2+
4N0(γ2 −N0)
βP+
16γ2
P+
4N0 − 2γ2
β+
− P +Q
4β(4.30)
z2 = −1
2
√Q2
2β2+
1
2P
(−Q
3
β2+
4QR
β− 8Q
)− R
2− 2 +
P −Q
4β, (4.31)
60

4.2. Sincronizzatore di Gardner
con β = βS×S,GA N0 = βN×N,GA+βN×S,GA, P =√N2
0 − 4βγ2, Q = −4β−N0
e R = 6β + γ2 + 2N0.
Selezionando le radici z1 e z2 all’interno del cerchio unitario si ottiene il filtro
sbiancante causale
W (z) =ξ(1− z−1)
(1− z1z−1)(1− z2z−1)(4.32)
e di conseguenza quello anti-causale risulta
W ∗(z−∗) =ξ(1− z)
(1− z∗1z)(1− z∗2z), (4.33)
in cui e stata adottata la notazione W ∗(z−∗) per indicare (W (1/z∗))∗.
A valle di W (z) e necessario il filtro 1-causale F (z), ottenibile come
F (z) = [Sθ(z)W∗(z−∗)]+
=
[ξγ2
(1− z−1)(1− z∗1z)(1− z∗2z)
]+
=ξγ2ζ2z−1
(1− z−1); (4.34)
la derivazione puo essere trovata in Appendice E. Nella (4.34) e stata
utilizzata la notazione [Q(z)]+ per indicare la porzione 1-causale di Q(z),
ossia
[Q(z)]+ =∞∑
k=1
qkz−k , (4.35)
ed e stata introdotta ζ2, pari a
ζ2 =1
(1− z∗1)(1− z∗2)=
1
(1− z1)(1− z2)=
√1
γ2ξ2. (4.36)
Il post-filtro ottimo 1-causale e quindi
Hott,GA,MF(z) = W (z)F (z)
=ξγz−1
(1− z1z−1)(1− z2z−1). (4.37)
Da esso e ricavabile il post-filtro ad anello aperto
LMF(z) =Hott,GA,MF(z)
1−Hott,GA,MF(z)=
ξγz−1
z−1p z1z2(1− z−1)(1− zpz−1)
, (4.38)
61

4.2. Sincronizzatore di Gardner
con
zp =2z1z2√
(−z1 − z2 − γξ)2 − 4z1z2 + z1 + z2 + γξ; (4.39)
il calcolo completo puo essere trovato in Appendice E.
Pertanto, per il caso di pre-filtro adattato, la varianza dell’errore di fase puo
essere calcolata nel seguente modo
σ2ψ = T
∫ T−1
0
Serr(ej2πfT )df , (4.40)
con
Serr(z) = Hott,GA,MF(z)H∗ott,GA,MF(z
−∗)Sψ,GA(z)+
+ (1−Hott,GA,MF(z))(1−H∗ott,GA,MF(z
−∗))Sθ(z) . (4.41)
Il filtro LMF (ej2πfT ), ossia il filtro L(ej2πfT ) di Fig.4.2, viene implementato
in modo efficiente come illustrato in Fig.4.6.
Figura 4.6: Schema a blocchi dell’implementazione di LMF (f) nel sincronizzatore di
Gardner.
In Fig.4.7 sono mostrati i post-filtri ottimi costruiti per diversi valori di
SNR e per entrambi i pre-filtri considerati in questa tesi; la figura e stata
ottenuta per una 4−QAM con fattore di roll-off pari a 0.25.
Il pre-filtro PO elimina la componente SxS di rumore di fase e, pertanto,
il post-filtro Hott,GA,PO(ej2πfT ) ha pendenza costante, oltre le frequenze di
taglio, indipendentemente dal valore di SNR. Si osservi che tale pendenza
62

4.2. Sincronizzatore di Gardner
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
−90
−80
−70
−60
−50
−40
−30
−20
−10
0
f T
| Hot
timo,
GA(e
j2πf
T)
|2 [dB
]
MF SNR = 50 dBMF SNR = 20 dBMF SNR = −10 dBPO SNR = 50 dBPO SNR = 30 dBPO SNR = −10 dB
Figura 4.7: Post-filtri ottimi per pre-filtri MF e PO, per diversi SNR; 4 − QAM e
roll-off α = 0.25.
e di −20 dB/decade, ossia la meta della pendenza del corrispondente post-
filtro calcolato per il sincronizzatore di O&M in assenza di self-noise, poiche
nel Gardner il post-filtro deve essere causale, mentre il precedente era causale
ed anticausale.
Il post-filtro costruito per il caso di pre-filtro MF coincide con quello del pre-
filtro PO a basso SNR, dove il termine SxS e dominato dagli altri contributi
di rumore e, quindi, risulta irrilevante. In corrispondenza di valori intermedi
di SNR, invece, il post-filtro Hott,GA,MF(ej2πfT ) esibisce zone con pendenza
differente: −20 dB/decade alle frequenze in cui domina il rumore bianco NxN
+ SxN, −40 dB/decade a quelle in cui invece domina il self-noise. Per valori
alti di SNR il termine SxS domina a tutte le frequenze e, quindi, la pendenza
del post-filtro Hott,GA,MF(ej2πfT ) e di −40 dB/decade e la sua frequenza di
taglio e inferiore a quella del post-filtro Hott,GA,PO(ej2πfT ) progettato per lo
stesso valore di SNR.
63

Capitolo 5
Simulazioni e risultati
In questo capitolo si riportano i risultati ottenuti per i diversi sincronizzatori
di simbolo studiati. Vengono utilizzati entrambi i pre-filtri descritti (MF e
PO) e tutti i vari post-filtri progettati e proposti (ottimi e sub-ottimi). Si
mostra come i risultati ottenuti dalle simulazioni validino l’analisi effettua-
ta, tanto per cio che riguarda la densita spettrale di potenza del self-noise,
quanto per quello che concerne le prestazioni raggiunte dai sincronizzatori,
in termini di varianza dell’errore di fase.
5.1 Sincronizzatore di Oerder & Meyr e sin-
cronizzatore di Serpedin
Come spiegato nella sezione 4.1, il sincronizzatore di simbolo di Serpedin
approssima il sincronizzatore proposto da Oerder e Meyr (O&M) e fornisce le
medesime prestazioni. Pertanto nel seguito si riportano sulle stesse figure sia
i risultati ottenuti tramite O&M, sia quelli offerti dall’utilizzo dello schema
di Serpedin.
5.1.1 Densita spettrale di potenza del rumore di fase
Prima di procedere con la valutazione delle prestazioni raggiunte dai dif-
ferenti sincronizzatori studiati, si desidera validare con un esempio l’analisi
effettuata sulla densita spettrale di potenza del rumore di fase.
64

5.1. Sincronizzatore di Oerder & Meyr e sincronizzatore di
Serpedin
Con riferimento ai sincronizzatori di O&M e di Serpedin, si compara quindi
la Sψ,S×S(ej2πfT ; ǫ) a valle del TED analizzata nei precedenti capitoli con
quanto ottenuto dalle simulazioni svolte. Si pone particolare attenzione alla
componente SxS (self-noise) poiche, si ricorda, era assente in letteratura una
trattazione completa su di essa.
Si consideri la Fig.5.1, ottenuta con il sincronizzatore di Oerder e Meyr,
per una 4 − QAM, con filtro in trasmissione a radice di coseno rialzato e
pre-filtro adattato in ricezione, con roll-off α pari a 0.25.
10−3
10−2
10−1
−30
−25
−20
−15
−10
−5
0
5
10
15
20
f T
Sψ
,SxS
( ej2
πfT ;
ε )
[dB
]
sim ε = 0 sim ε = T/4 sim ε = T/2 sim ε = 3T/4 analisi ε = 0 analisi ε = T/4 analisi ε = T/2 analisi ε = 3T/4
Figura 5.1: Densita spettrale di potenza del self-noise Sψ,S×S(ej2πfT ; ǫ) per il sincro-
nizzatore di Oerder e Meyr, per diversi valori del ritardo ǫ; 4−QAM, roll-off α = 0.25
e pre-filtro MF.
In figura viene riportata la densita spettrale di potenza del self-noise per
diversi valori del ritardo ǫ tempo-invariante. Le simulazioni validano l’ana-
lisi effettuata e confermano la ragionevolezza dell’approssimazione (2.35), in
quanto e evidente la pendenza di 20 dB/decade.
In Fig.5.2 viene riportata la densita spettrale di potenza media Sψ,S×S(ej2πfT )
e la sua approssimazione (2.36), con pre-filtri MF e PO e per M−QAM, con
M pari a 4 e 256.
65
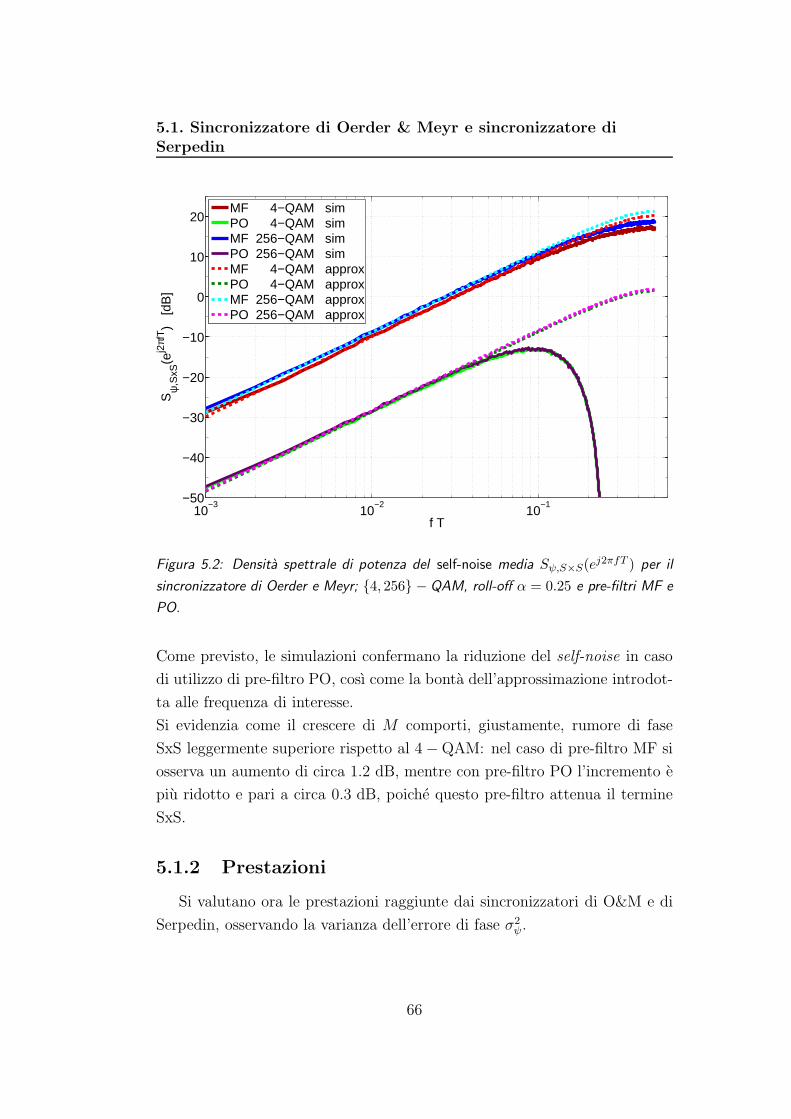
5.1. Sincronizzatore di Oerder & Meyr e sincronizzatore di
Serpedin
10−3
10−2
10−1−50
−40
−30
−20
−10
0
10
20
f T
Sψ
,SxS
(ej2
πfT)
[dB
]
MF 4−QAM simPO 4−QAM simMF 256−QAM simPO 256−QAM simMF 4−QAM approxPO 4−QAM approxMF 256−QAM approxPO 256−QAM approx
Figura 5.2: Densita spettrale di potenza del self-noise media Sψ,S×S(ej2πfT ) per il
sincronizzatore di Oerder e Meyr; {4, 256} − QAM, roll-off α = 0.25 e pre-filtri MF e
PO.
Come previsto, le simulazioni confermano la riduzione del self-noise in caso
di utilizzo di pre-filtro PO, cosı come la bonta dell’approssimazione introdot-
ta alle frequenza di interesse.
Si evidenzia come il crescere di M comporti, giustamente, rumore di fase
SxS leggermente superiore rispetto al 4−QAM: nel caso di pre-filtro MF si
osserva un aumento di circa 1.2 dB, mentre con pre-filtro PO l’incremento e
piu ridotto e pari a circa 0.3 dB, poiche questo pre-filtro attenua il termine
SxS.
5.1.2 Prestazioni
Si valutano ora le prestazioni raggiunte dai sincronizzatori di O&M e di
Serpedin, osservando la varianza dell’errore di fase σ2ψ.
66
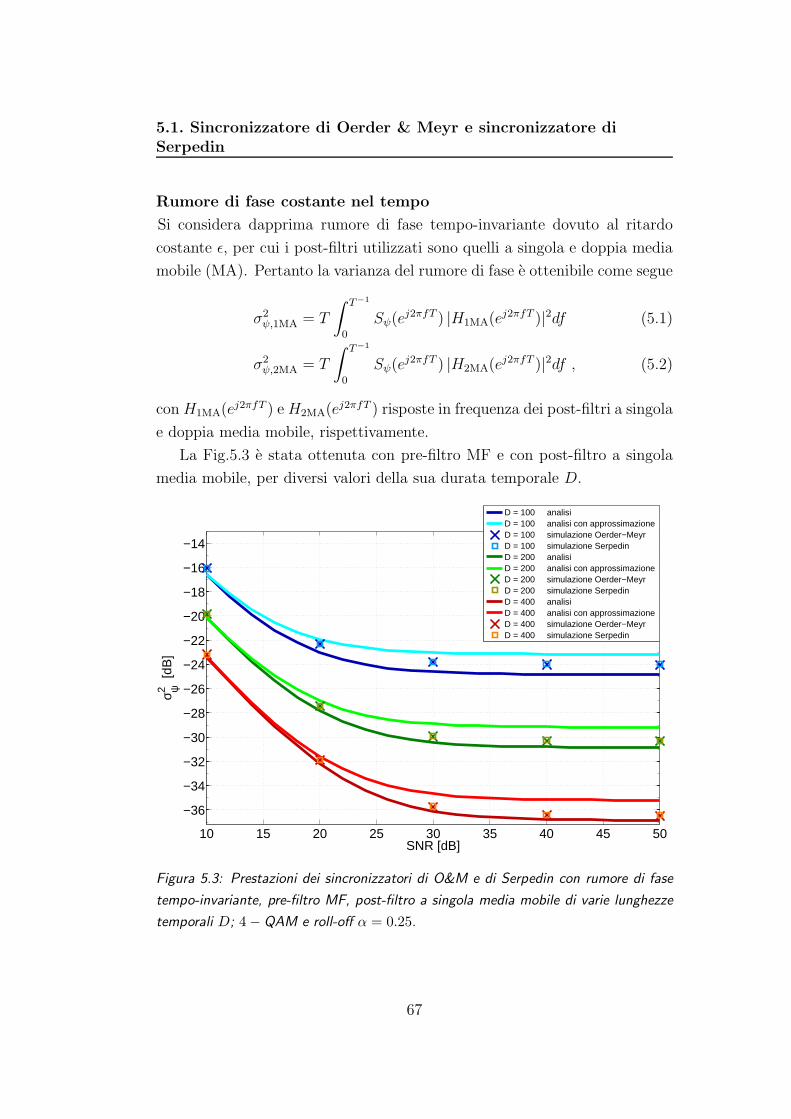
5.1. Sincronizzatore di Oerder & Meyr e sincronizzatore di
Serpedin
Rumore di fase costante nel tempo
Si considera dapprima rumore di fase tempo-invariante dovuto al ritardo
costante ǫ, per cui i post-filtri utilizzati sono quelli a singola e doppia media
mobile (MA). Pertanto la varianza del rumore di fase e ottenibile come segue
σ2ψ,1MA = T
∫ T−1
0
Sψ(ej2πfT ) |H1MA(e
j2πfT )|2df (5.1)
σ2ψ,2MA = T
∫ T−1
0
Sψ(ej2πfT ) |H2MA(e
j2πfT )|2df , (5.2)
conH1MA(ej2πfT ) eH2MA(e
j2πfT ) risposte in frequenza dei post-filtri a singola
e doppia media mobile, rispettivamente.
La Fig.5.3 e stata ottenuta con pre-filtro MF e con post-filtro a singola
media mobile, per diversi valori della sua durata temporale D.
10 15 20 25 30 35 40 45 50
−36
−34
−32
−30
−28
−26
−24
−22
−20
−18
−16
−14
SNR [dB]
σ2 ψ [
dB]
D = 100 analisiD = 100 analisi con approssimazioneD = 100 simulazione Oerder−MeyrD = 100 simulazione SerpedinD = 200 analisiD = 200 analisi con approssimazioneD = 200 simulazione Oerder−MeyrD = 200 simulazione SerpedinD = 400 analisiD = 400 analisi con approssimazioneD = 400 simulazione Oerder−MeyrD = 400 simulazione Serpedin
Figura 5.3: Prestazioni dei sincronizzatori di O&M e di Serpedin con rumore di fase
tempo-invariante, pre-filtro MF, post-filtro a singola media mobile di varie lunghezze
temporali D; 4− QAM e roll-off α = 0.25.
67

5.1. Sincronizzatore di Oerder & Meyr e sincronizzatore di
Serpedin
Come argomentato nei capitoli precedenti, per quanto riguarda il termine
SxS l’approssimazione introdotta nella (2.28) non e buona alle alte frequen-
ze, pertanto non e adeguata quando si utilizza un post-filtro a singola media
mobile che ha lobi laterali non sufficientemente attenuati: in figura infatti si
vede come l’utilizzo dell’approssimazione (2.28) dia luogo ad una sovra-stima
della varianza.
Le curve teoriche calcolate senza approssimazioni risultano, invece, legger-
mente inferiori rispetto a quelle simulate, poiche nell’analisi non e stato inse-
rito il contributo di rumore dovuto all’estrazione dell’argomento per estrapo-
lare la fase. Infatti per svolgere l’analisi e stato utilizzato il ramo superiore
del modello in figura 2.4, il quale non prevede l’estrazione della fase, a diffe-
renza dell’O&M classico implementato per le simulazioni.
Si noti anche come le simulazioni eseguite con i sincronizzatori di O&M e di
Serpedin diano risultati coincidenti, a conferma dell’equivalenza delle presta-
zioni tra i due schemi feedforward.
Si osservi come le prestazioni migliorino per valori maggiori di D. Cio e
dovuto al fatto che all’aumentare della durata temporale del post-filtro, la
sua banda di transizione si stringe e, pertanto, il rumore selezionato e infe-
riore. Infatti, essendo il rumore di fase tempo-invariante, il post-filtro ottimo
sarebbe quello di durata temporale tendente all’infinito, in modo tale da sele-
zionare solo la componente continua a valle del TED, ossia la sincronizzante
demodulata desiderata.
Si consideri la Fig.5.4, ottenuta come la precedente, con post-filtro a sin-
gola media mobile, ma con pre-filtro ottimizzato (PO).
In questo caso e ulteriormente evidente l’inadeguatezza dell’utilizzo dell’ap-
prossimazione (2.28) se il post-filtro e a singola media mobile, a causa del
fatto che la banda di frequenze di cattiva approssimazione e piu estesa per il
caso di pre-filtro PO, come mostrato in Fig.2.10 e confermato in Fig.5.2.
Si sottolinea nuovamente la coincidenza tra prestazioni di O&M e di Serpe-
din.
Come previsto dall’analisi, per valori bassi di SNR le prestazioni ottenute
con l’utilizzo del pre-filtro PO sono le medesime viste nella precedente figura
per il caso di pre-filtro MF. Infatti il miglioramento offerto dal pre-filtro
PO riguarda il solo termine di self-noise e, quindi, e evidente solo per valori
68
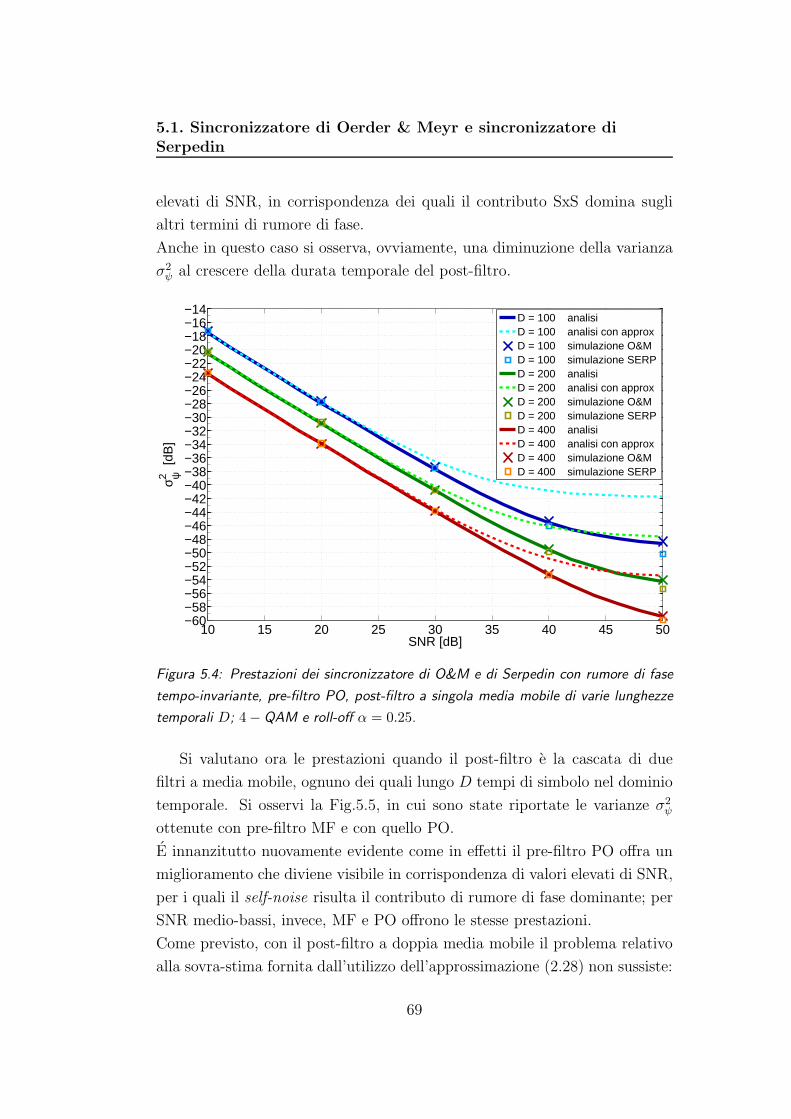
5.1. Sincronizzatore di Oerder & Meyr e sincronizzatore di
Serpedin
elevati di SNR, in corrispondenza dei quali il contributo SxS domina sugli
altri termini di rumore di fase.
Anche in questo caso si osserva, ovviamente, una diminuzione della varianza
σ2ψ al crescere della durata temporale del post-filtro.
10 15 20 25 30 35 40 45 50−60−58−56−54−52−50−48−46−44−42−40−38−36−34−32−30−28−26−24−22−20−18−16−14
SNR [dB]
σ2 ψ [
dB]
D = 100 analisiD = 100 analisi con approxD = 100 simulazione O&MD = 100 simulazione SERPD = 200 analisiD = 200 analisi con approxD = 200 simulazione O&MD = 200 simulazione SERPD = 400 analisiD = 400 analisi con approxD = 400 simulazione O&MD = 400 simulazione SERP
Figura 5.4: Prestazioni dei sincronizzatore di O&M e di Serpedin con rumore di fase
tempo-invariante, pre-filtro PO, post-filtro a singola media mobile di varie lunghezze
temporali D; 4− QAM e roll-off α = 0.25.
Si valutano ora le prestazioni quando il post-filtro e la cascata di due
filtri a media mobile, ognuno dei quali lungo D tempi di simbolo nel dominio
temporale. Si osservi la Fig.5.5, in cui sono state riportate le varianze σ2ψ
ottenute con pre-filtro MF e con quello PO.
E innanzitutto nuovamente evidente come in effetti il pre-filtro PO offra un
miglioramento che diviene visibile in corrispondenza di valori elevati di SNR,
per i quali il self-noise risulta il contributo di rumore di fase dominante; per
SNR medio-bassi, invece, MF e PO offrono le stesse prestazioni.
Come previsto, con il post-filtro a doppia media mobile il problema relativo
alla sovra-stima fornita dall’utilizzo dell’approssimazione (2.28) non sussiste:
69

5.1. Sincronizzatore di Oerder & Meyr e sincronizzatore di
Serpedin
in figura, infatti, e mostrata la coincidenza perfetta tra l’analisi effettuata
con e senza introdurre l’approssimazione.
Ancora si osserva come O&M e Serpedin forniscano gli stessi risultati e come,
stringendo la banda di transizione del post-filtro, le prestazioni migliorino.
5 10 15 20 25 30 35 40 45 50
−65
−60
−55
−50
−45
−40
−35
−30
−25
−20
−15
SNR [dB]
σ2 ψ [
dB]
D = 100 MF analisiD = 100 MF approxD = 100 MF sim O&MD = 100 MF sim SERPD = 400 MF analisiD = 400 MF approxD = 400 MF sim O&MD = 400 MF sim SERPD = 100 PO analisiD = 100 PO approxD = 100 PO sim O&MD = 100 PO sim SERPD = 400 PO analisiD = 400 PO approxD = 400 PO sim O&MD = 400 PO sim SERP
Figura 5.5: Prestazioni dei sincronizzatori di O&M e di Serpedin con rumore di fase
tempo-invariante, pre-filtri MF e PO, post-filtro a doppia media mobile, ciascuna di
lunghezza temporale D; 4−QAM e roll-off α = 0.25.
Rumore di fase tempo-variante
Si riportano di seguito le prestazioni ottenute in presenza di rumore di fase
tempo-variante 2πǫ(t)/T del tipo di Wiener, mostrando il confronto tra ana-
lisi e simulazioni.
Si ricorda che e stato derivato il post-filtro ottimo e che sono stati poi pre-
si in considerazione post-filtri a singola e doppia media mobile poiche, per
quanto le loro prestazioni siano inferiori all’ottimo, essi offrono una comples-
sita realizzativa sensibilmente minore. I post-filtri MA sono stati ottimizzati
secondo due tecniche differenti: imponendo che la loro banda equivalente
70

5.1. Sincronizzatore di Oerder & Meyr e sincronizzatore di
Serpedin
di rumore coincidesse con quella del post-filtro ottimo e ricercando empiri-
camente il dimensionamento migliore. E gia stato mostrato come la prima
tecnica non fosse sempre adeguata, ma per completezza e stata ugualmente
implementata.
Per maggiore chiarezza e leggibilita si riportano su figure separate le pre-
stazioni ottenute con pre-filtro adattato MF e con pre-filtro ottimo PO,
commentando in seguito il confronto tra i due.
Si consideri la Fig.5.6, ottenuta per una 4 − QAM, roll-off pari a 0.25 e
pre-filtro adattato MF.
5 10 15 20 25 30 35 40 45 50−42
−40
−38
−36
−34
−32
−30
−28
−26
SNR [dB]
σ2 ψ [
dB]
MF th O&M ottimoMF th O&M 2MA (Beq)MF th O&M 1MA (Beq)MF th O&M 2MA (emp)MF th O&M 1MA (emp)MF sim O&M ottimoMF sim O&M 2MA (Beq)MF sim O&M 1MA (Beq)MF sim O&M 2MA (emp)MF sim O&M 1MA (emp)MF sim SERP ottimoMF sim SERP 2MA (Beq)MF sim SERP 1MA (Beq)MF sim SERP 2MA (emp)MF sim SERP 1MA (emp)
Figura 5.6: Prestazioni dei sincronizzatori di O&M e di Serpedin con rumore di fase
tempo-variante, pre-filtro MF, post-filtro ottimo e post-filtri a singola e doppia media
mobile ottimizzati; 4− QAM e roll-off α = 0.25.
Si osserva quanto precedentemente detto circa l’inadeguatezza della prima
tecnica di ottimizzazione quando il post-filtro e la singola media mobile; ov-
viamente tale ottimizzazione deve essere evitata in questo caso.
La curva teorica relativa all’ottimizzazione empirica del post-filtro a singo-
la media mobile sovra-stima la varianza ottenuta tramite le simulazioni per
il motivo spiegato nei capitoli precedenti, ossia a causa dell’utilizzo dell’ap-
71

5.1. Sincronizzatore di Oerder & Meyr e sincronizzatore di
Serpedin
prossimazione (2.28) per l’analisi. L’effetto di sovra-stima dovuto a tale
approssimazione e invece completamente trascurabile nel caso di post-filtro
a doppia media mobile o di post-filtro ottimo.
Le due modalita di ottimizzazione proposte per la doppia media mobile for-
niscono risultati simili e prossimi a quelli ottenuti tramite post-filtro ottimo;
le simulazioni ricalcano perfettamente la curva tracciata grazie all’analisi
teorica eseguita.
Per quanto riguarda il caso di pre-filtro PO si osservi invece la Fig.5.7.
5 10 15 20 25 30 35 40 45 50−46
−44
−42
−40
−38
−36
−34
−32
−30
−28
−26
SNR [dB]
σ2 ψ [
dB]
PO th O&M ottimoPO th O&M 2MA (Beq)PO th O&M 1MA (Beq)PO th O&M 2MA (emp)PO th O&M 1MA (emp)PO sim O&M ottimoPO sim O&M 2MA (Beq)PO sim O&M 1MA (Beq)PO sim O&M 2MA (emp)PO sim O&M 1MA (emp)PO sim SERP ottimoPO sim SERP 2MA (Beq)PO sim SERP 1MA (Beq)PO sim SERP 2MA (emp)PO sim SERP 1MA (emp)
Figura 5.7: Prestazioni dei sincronizzatori di O&M e di Serpedin con rumore di fase
tempo-variante, pre-filtro PO, post-filtro ottimo e post-filtri a singola e doppia media
mobile ottimizzati; 4− QAM e roll-off α = 0.25.
E nuovamente evidente come non sia opportuno utilizzare la prima tecnica di
ottimizzazione quando il post-filtro e la singola media mobile. Ancora e vi-
sibile come entrambe le modalita di ottimizzazione sovra-stimino la varianza
quando si ha il post-filtro a singola media mobile: il distacco tra curve anali-
tiche e valori simulati risulta maggiore rispetto al caso di pre-filtro MF poiche
l’approssimazione (2.28) e peggiore nel caso PO. Oltretutto l’utilizzo di tale
approssimazione fa anche sı che la ricerca empirica della lunghezza temporale
72

5.1. Sincronizzatore di Oerder & Meyr e sincronizzatore di
Serpedin
Demp conduca ad un valore tutt’altro che ottimale: cio e confermato dalle
simulazioni che, paradossalmente, mostrano risultati migliori quando l’otti-
mizzazione e svolta tramite uguaglianza delle bande equivalenti di rumore.
Si conclude, quindi, che per il caso di pre-filtro ottimizzato e post-filtro a
singola media mobile nessuna delle due tecniche di ottimizzazione applicate
e adeguata. Si precisa nuovamente, tuttavia, che affinche la ricerca empirica
dia luogo al risultato desiderato e sufficiente ripetere l’analisi senza introdur-
re l’approssimazione (2.28), ma cio non e utile ai fini della tesi e pertanto
non e stato svolto.
Le ottimizzazioni sulla doppia media mobile forniscono risultati molto simili
tra loro e vicini alle prestazioni ottenute con l’utilizzo del post-filtro ottimo;
i valori simulati coincidono con quelli calcolati analiticamente.
Tanto per la doppia media mobile, quanto per il post-filtro ottimo, e evidente
come il pre-filtro PO, rispetto al caso di pre-filtro MF, permetta il raggiun-
gimento di prestazioni migliori per valori di SNR medio-alti (circa 4.5 dB a
50 dB di SNR), mentre a basso SNR i risultati coincidono ovviamente.
Sino ad ora e stata considerata una 4−QAM per semplicita, tuttavia si
ritiene opportuno prendere in esame anche il caso di schemi di modulazio-
ne piu densi. Pertanto, seppur le considerazioni siano pressoche analoghe a
quelle gia effettuate per il caso 4−QAM, si desidera mostrare e commentare
le prestazioni ottenute con una 256 − QAM. A tal proposito, quindi, si os-
servi la Fig.5.8, ottenuta utilizzando pre-filtri MF e PO e post-filtri ottimi e
sub-ottimi (ottimizzati empiricamente).
I risultati in figura mostrano nuovamente come la cascata di due medie mobili
offra prestazioni migliori della singola media mobile, in particolar modo per
valori elevati di SNR. Cio e sempre dovuto al fatto che, in corrispondenza
di SNR alto, la banda di transizione del post-filtro diviene piuttosto larga e
la porzione ad alta frequenza dello spettro del self-noise, approssimato come
in (2.36), non e sufficientemente attenuata dai lobi laterali della singola MA.
Inoltre, come gia precedentemente sottolineato per il caso 4−QAM, l’analisi
teorica sovra-stima leggermente le prestazioni ottenute tramite simulazione
quando il post-filtro e la singola media mobile, soprattutto per pre-filtro ot-
timizzato: a 50 dB di SNR, per esempio, le prestazioni analitiche con PO e
singola MA superano quelle simulate di circa 1 dB. Cio e sempre dovuto al
73

5.1. Sincronizzatore di Oerder & Meyr e sincronizzatore di
Serpedin
fatto che i lobi laterali della singola media mobile non attenuano a sufficien-
za le alte frequenze, in corrispondenza delle quali, pero, l’approssimazione
(2.36) non e affatto buona nel caso di pre-filtro ottimizzato, come evidente
in Fig.5.2.
5 10 15 20 25 30 35 40 45 50−46
−44
−42
−40
−38
−36
−34
−32
−30
−28
−26
SNR [dB]
σ2 ψ [
dB]
MF th ottimoMF th 2MAMF th 1MAPO th ottimoPO th 2MAPO th 1MAMF sim ottimoMF sim 2MAMF sim 1MAPO sim ottimoPO sim 2MAPO sim 1MA
Figura 5.8: Prestazioni del sincronizzatore di O&M con rumore di fase tempo-variante,
pre-filtri MF e PO, post-filtro ottimo e post-filtri a singola e doppia media mobile
ottimizzati empiricamente; 256− QAM e roll-off α = 0.25.
In figura, inoltre, e osservabile anche in questo caso come, assunto un filtro
di post-detection, il pre-filtro ottimizzato PO garantisca il raggiungimento di
prestazioni superiori a quelle ottenute utilizzando il pre-filtro adattato MF.
Tuttavia, si evidenzia che, nel caso di utilizzo di post-filtro ottimo o di doppia
media mobile, la scelta del pre-filtro appare del tutto ininfluente per valori
medio-bassi di SNR; infatti solo dai 30 dB di SNR le prestazioni ottenute con
MF e PO iniziano a differire. Si ricorda che comunemente il valore di γ2 e
inferiore a quello utilizzato in questo caso, poiche qui e stato assunto il valore
peggiore in commercio; percio, per le circostanze di interesse pratico (con γ2
minori) la divergenza tra prestazioni offerte da pre-filtro MF e PO avviene
74
5.2. Sincronizzatore di Gardner
in corrispondenza di SNR ancora piu elevati. Pertanto si conclude che non
e necessario l’utilizzo del pre-filtro ottimizzato per formati di modulazione
densi come la 256−QAM o meno.
Inoltre, come previsto dall’analisi teorica, le simulazioni confermano che le
prestazioni offerte dall’utilizzo del filtro di post-detection a doppia media mo-
bile si mantengono distanti dalle ottime per valori compresi tra 0.07 e 0.2 dB
per il caso di pre-filtro MF, tra 0.06 e 0.16 dB per quello PO.
Infine si precisa che e stato verificato, tramite analisi e simulazioni, che an-
che in questo caso lo schema di Serpedin raggiunge le medesime prestazioni
dell’algoritmo di O&M.
5.2 Sincronizzatore di Gardner
Analogamente a quanto effettuato per gli schemi di O&M e di Serpedin,
di seguito vengono riportati i risultati delle simulazioni eseguite per il sincro-
nizzatore retroazionato di Gardner e viene validata l’analisi svolta.
Anche in questo caso, inoltre, si considera dapprima uno schema di modula-
zione 4−QAM e, in seguito, si estende la trattazione a modulazioni con un
numero di livelli piu elevato, nello specifico 256.
5.2.1 Densita spettrale di potenza del rumore di fase
Si desidera innanzitutto confermare, tramite confronto con le simulazioni,
la correttezza dell’analisi effettuata sulla densita spettrale di potenza del
rumore di fase.
Si consideri la Fig.5.9 ottenuta per una 4 − QAM, con filtro in trasmis-
sione del tipo radice di coseno rialzato, con diversi valori di roll-off α, e filtro
adattato in ricezione.
In figura e riportata la densita spettrale del rumore di fase dovuto al solo
self-noise, in quanto i contributi NxN e SxN sono bianchi sulla banda di
transizione del post-filtro e analoghi a quanto ottenuto per il sincronizzatore
di O&M. L’analisi teorica viene confermata dalle curve simulate, per tutti i
valori di roll-off considerati. Per completezza sono mostrate anche le curve
ottenute tramite l’approssimazione (4.17), poiche nel seguito si lavora utiliz-
75
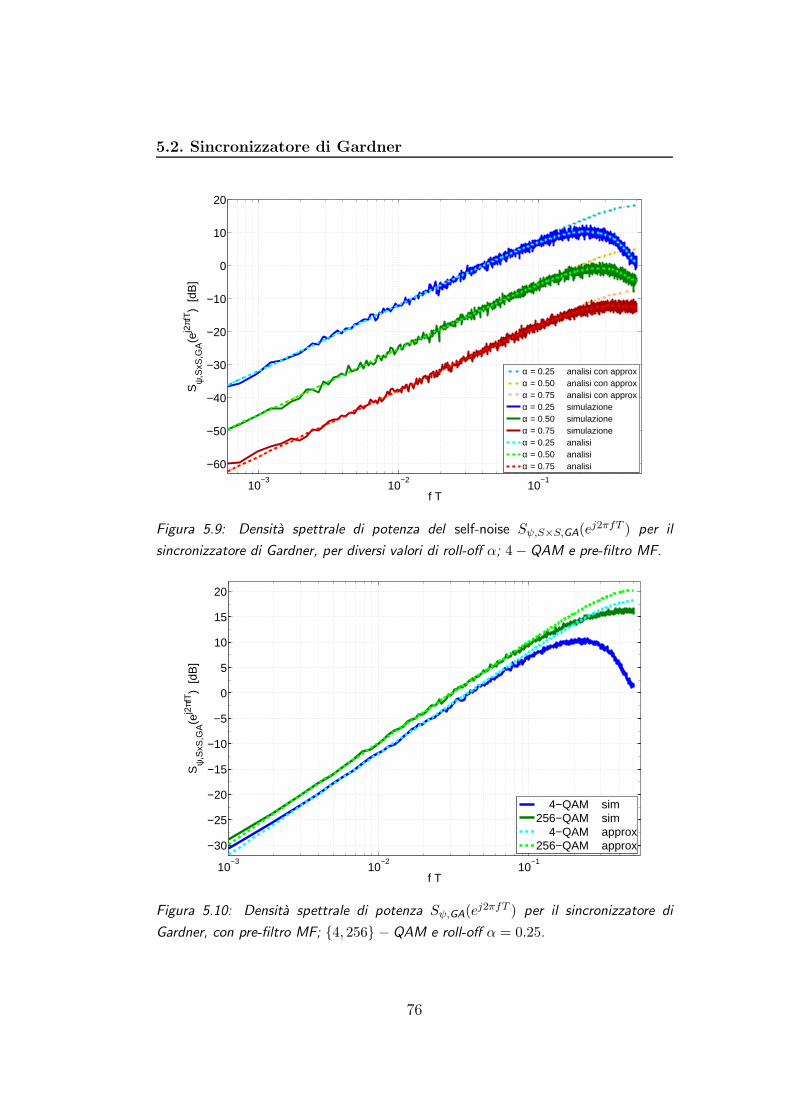
5.2. Sincronizzatore di Gardner
10−3
10−2
10−1
−60
−50
−40
−30
−20
−10
0
10
20
f T
Sψ
,SxS
,GA(e
j2πf
T)
[dB
]
α = 0.25 analisi con approxα = 0.50 analisi con approxα = 0.75 analisi con approxα = 0.25 simulazioneα = 0.50 simulazioneα = 0.75 simulazioneα = 0.25 analisiα = 0.50 analisiα = 0.75 analisi
Figura 5.9: Densita spettrale di potenza del self-noise Sψ,S×S,GA(ej2πfT ) per il
sincronizzatore di Gardner, per diversi valori di roll-off α; 4− QAM e pre-filtro MF.
10−3
10−2
10−1
−30
−25
−20
−15
−10
−5
0
5
10
15
20
f T
Sψ
,SxS
,GA(e
j2πf
T)
[dB
]
4−QAM sim256−QAM sim 4−QAM approx256−QAM approx
Figura 5.10: Densita spettrale di potenza Sψ,GA(ej2πfT ) per il sincronizzatore di
Gardner, con pre-filtro MF; {4, 256} − QAM e roll-off α = 0.25.
76
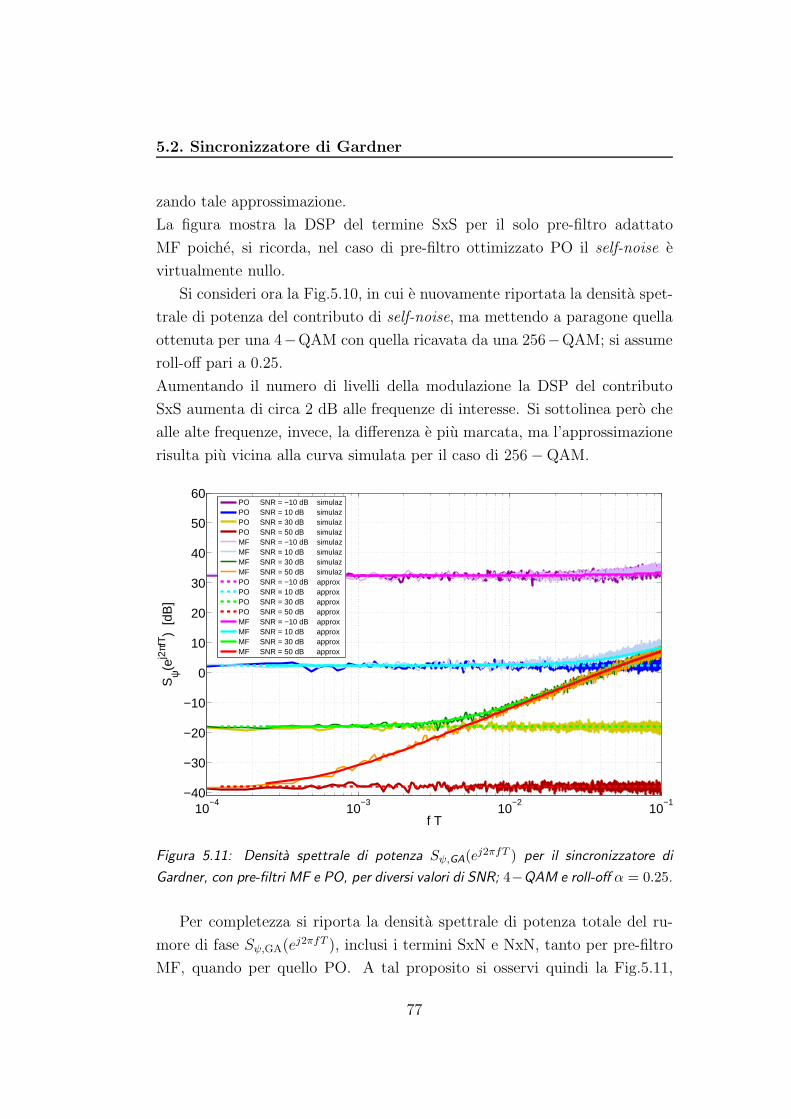
5.2. Sincronizzatore di Gardner
zando tale approssimazione.
La figura mostra la DSP del termine SxS per il solo pre-filtro adattato
MF poiche, si ricorda, nel caso di pre-filtro ottimizzato PO il self-noise e
virtualmente nullo.
Si consideri ora la Fig.5.10, in cui e nuovamente riportata la densita spet-
trale di potenza del contributo di self-noise, ma mettendo a paragone quella
ottenuta per una 4−QAM con quella ricavata da una 256−QAM; si assume
roll-off pari a 0.25.
Aumentando il numero di livelli della modulazione la DSP del contributo
SxS aumenta di circa 2 dB alle frequenze di interesse. Si sottolinea pero che
alle alte frequenze, invece, la differenza e piu marcata, ma l’approssimazione
risulta piu vicina alla curva simulata per il caso di 256−QAM.
10−4
10−3
10−2
10−1
−40
−30
−20
−10
0
10
20
30
40
50
60
f T
Sψ(e
j2πf
T)
[dB
]
PO SNR = −10 dB simulazPO SNR = 10 dB simulazPO SNR = 30 dB simulazPO SNR = 50 dB simulazMF SNR = −10 dB simulazMF SNR = 10 dB simulazMF SNR = 30 dB simulazMF SNR = 50 dB simulazPO SNR = −10 dB approxPO SNR = 10 dB approxPO SNR = 30 dB approxPO SNR = 50 dB approx MF SNR = −10 dB approx MF SNR = 10 dB approxMF SNR = 30 dB approxMF SNR = 50 dB approx
Figura 5.11: Densita spettrale di potenza Sψ,GA(ej2πfT ) per il sincronizzatore di
Gardner, con pre-filtri MF e PO, per diversi valori di SNR; 4−QAM e roll-off α = 0.25.
Per completezza si riporta la densita spettrale di potenza totale del ru-
more di fase Sψ,GA(ej2πfT ), inclusi i termini SxN e NxN, tanto per pre-filtro
MF, quando per quello PO. A tal proposito si osservi quindi la Fig.5.11,
77

5.2. Sincronizzatore di Gardner
ottenuta per diversi valori di SNR e con roll-off pari a 0.25.
La figura mostra, per il caso di pre-filtro MF, come all’aumentare del valori
di SNR il contributo dovuto al self-noise divenga via via il dominante. Il
pre-filtro PO invece elimina il termine SxS, come previsto, e la Sψ,GA(ej2πfT )
risulta bianca indipendentemente dal valore di SNR considerato.
5.2.2 Prestazioni in presenza di rumore di fase tempo-
variante
Si riportano di seguito le prestazioni ottenute con il sincronizzatore di sim-
bolo di Gardner in presenza di rumore di fase tempo-variante di tipo Wiener.
I post-filtri utilizzati sono quelli ottimi calcolati nel capitolo precedente per
i casi di pre-filtro adattato MF ed ottimizzato PO.
Le curve teoriche della varianza del rumore di fase σ2ψ a valle del sincroniz-
zatore sono state ottenute con le formule (4.26) e (4.40), rispettivamente per
i casi di pre-filtri PO e MF.
Si consideri la Fig.5.12, ottenuta per una {4, 256} − QAM, con roll-off
0.25.
In figura si osserva, giustamente, un distacco tra prestazioni ottenute con
la 4 e con la 256 − QAM solo per valori di SNR per i quali domina il self-
noise, tanto per il pre-filtro adattato MF, quanto per quello ottimizzato PO.
In quest’ultimo caso, in realta, il termine SxS dovrebbe essere virtualmente
nullo, tuttavia in figura si puo osservare la presenza di un floor causato dal
self-noise oltre i 40 dB di SNR. Si tratta di un residuo di self-noise dovuto
alla correzione imperfetta nella retroazione.
Inoltre si evidenzia come, per valori di SNR inferiori a 20 dB, il pre-filtro PO
offra prestazioni indistinguibili da quelle ottenute tramite pre-filtro MF; si
ricorda che, nel caso di sincronizzatore di O&M, tale soglia era circa a 30 dB.
Rispetto ai sincronizzatori feedforward studiati, lo schema di Gardner rag-
giunge prestazioni inferiori di circa 3 dB a basso SNR, mentre a 50 dB di
SNR il peggioramento e di circa 6 dB per il pre-filtro MF e di 2 dB per
quello PO.
78
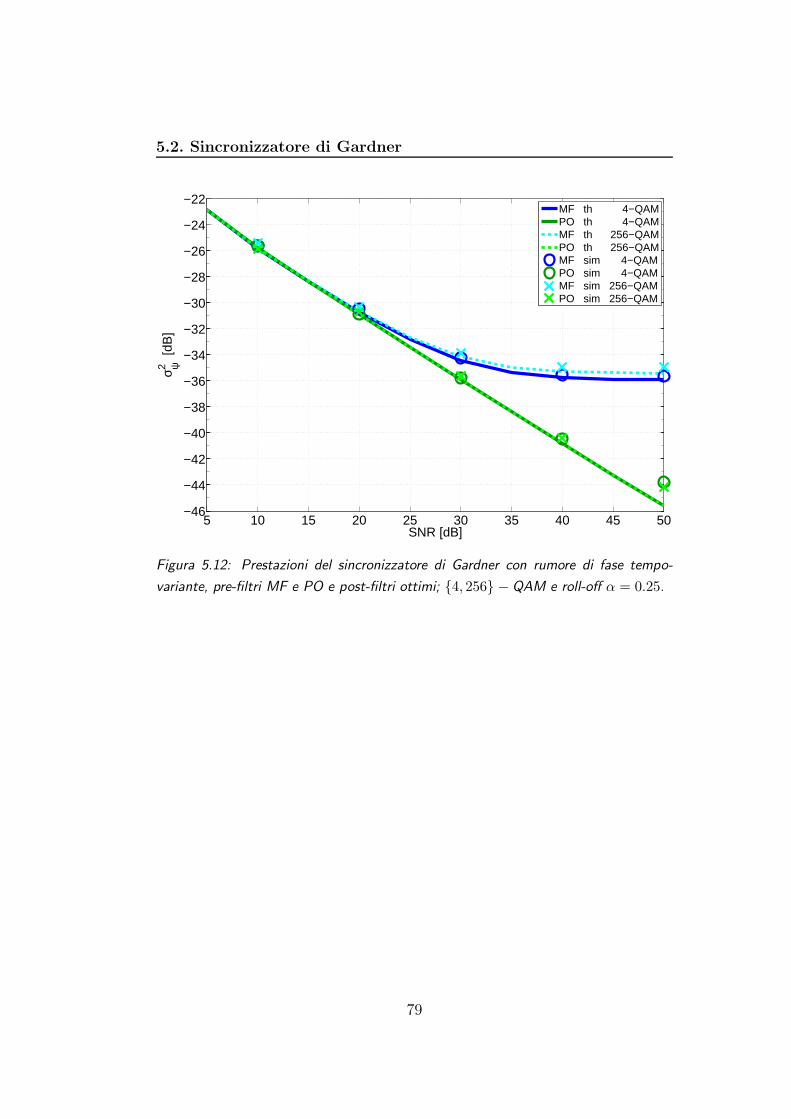
5.2. Sincronizzatore di Gardner
5 10 15 20 25 30 35 40 45 50−46
−44
−42
−40
−38
−36
−34
−32
−30
−28
−26
−24
−22
SNR [dB]
σ2 ψ [
dB]
MF th 4−QAMPO th 4−QAMMF th 256−QAMPO th 256−QAMMF sim 4−QAMPO sim 4−QAMMF sim 256−QAMPO sim 256−QAM
Figura 5.12: Prestazioni del sincronizzatore di Gardner con rumore di fase tempo-
variante, pre-filtri MF e PO e post-filtri ottimi; {4, 256} − QAM e roll-off α = 0.25.
79
Capitolo 6
Conclusioni e possibili sviluppi
futuri
In questa tesi e stata studiata la densita spettrale di potenza del rumore
di fase tempo-variante che affligge i sincronizzatori di simbolo di Oerder e
Meyr, di Serpedin e di Gardner. La validita del modello proposto per la ca-
ratterizzazione del rumore di fase e stata confermata dalle simulazioni, come
illustrato nel precedente capitolo.
E stato quindi possibile procedere con la progettazione del filtro di post-
detection. Dopo aver ricavato il post-filtro ottimo, sono stati proposti diffe-
renti filtri sub-ottimi per i sincronizzatori feedforward, allo scopo di fornire
soluzioni alternative, con il vantaggio di una complessita realizzativa inferiore
e tali da garantire prestazioni prossime alle ottime. Sono state suggerite due
differenti tecniche di ottimizzazione dei post-filtri sub-ottimi, evidenziando
per ciascuna punti di forza e limiti di applicabilita. Per il sincronizzatore
feedback considerato, quello di Gardner, e stato progettato il filtro di post-
detection ottimo, implementato in modo efficiente.
L’analisi delle prestazioni raggiunte dai sincronizzatori e i risultati ottenu-
ti tramite simulazione hanno validato la trattazione eseguita e confermato
l’efficacia delle ottimizzazioni implementate.
L’analisi svolta in questa tesi ha fornito la possibilita di quantificare il
floor dovuto al self-noise che le prestazioni dei sincronizzatori esibiscono a
valori di SNR medio-alti.
80

Inoltre, la progettazione dei filtri ottimi di post-detection ha permesso di
ricavare un limite inferiore per le prestazioni che i sincronizzatori presi in
esame possono raggiungere. In tal modo e stato possibile valutare la bonta
delle soluzioni sub-ottime proposte per i sincronizzatori di Oerder e Meyr e
di Serpedin: nel caso di pre-filtro adattato MF l’utilizzo di un post-filtro a
doppia media mobile, ottimizzato secondo la tecnica mostrata, permette di
ottenere prestazioni prossime alle ottime, dalle quali si distacca per valori
compresi tra 0.07 dB e 0.2 dB; per quanto concerne il pre-filtro ottimizzato
PO, invece, il peggioramento rispetto all’ottimo e compreso tra 0.06 dB e
0.16 dB.
Nel caso dei sincronizzatori feedforward studiati, inoltre, e stato mostrato
come l’utilizzo del pre-filtro ottimizzato non dia vantaggi per valori di SNR
inferiori a 30 dB circa, quando il filtro di post-detection e la doppia media
mobile od il post-filtro ottimo; pertanto il pre-filtro PO appare non necessario
per modulazioni M −QAM per valori di M minori od uguali a 256.
Nel caso feedback di Gardner con post-filtro ottimo, invece, i pre-filtri MF e
PO danno luogo a prestazioni del sincronizzatore indistinguibili tra loro al
di sotto di 20 dB di SNR.
Uno sviluppo possibile di questo lavoro consiste nell’estensione dello stu-
dio del filtro di post-detection a situazioni in cui il canale risulti velocemente
tempo-variante. Anche in quella circostanza, infatti, vi sarebbe la necessita
di allargare la banda del post-filtro, analogamente a quanto richiesto in que-
sta tesi a causa della presenza di rumore di fase tempo-variante dovuto agli
oscillatori locali in trasmissione e ricezione.
81

Appendice A
Sincronizzante nel
sincronizzatore di Oerder e
Meyr
In questa appendice si validano i risultati presentati nelle equazioni (2.17) e
(2.18), ossia si dimostra che il modello di Fig.2.2 offre in uscita la sincroniz-
zante demodulata, come nel sincronizzatore a quadratore tempo-continuo e
come nello schema di Oerder-Meyr. Essa costituisce la parte deterministica
(il valore medio) e da essa si estrae la stima di ǫ.
Per comodita si svolge l’analisi nel tempo-continuo e, al termine, si cam-
piona in modo opportuno.
Il contributo deterministico di xℜ(kT ; ǫ) si ottiene come
E {xℜ(kT ; ǫ)} = E {xℜ(t; ǫ)|t=kT}
= A cos
(2πǫ
T+ 2πk
)
= A cos
(2πǫ
T
), (A.1)
82

con
E {xℜ(t; ǫ)}|t=kT = E {z1 (t; ǫ)− z3 (t; ǫ)}|t=kT= E {z1 (t; ǫ)}|t=kT − E {z3 (t; ǫ)}|t=kT
=A
2cos
(2π(t+ ǫ)
T
)∣∣∣∣t=kT
− A
2cos
(2π(t− T/2 + ǫ)
T
)∣∣∣∣t=kT
=A
2
(cos
(2π(t+ ǫ)
T
)∣∣∣∣t=kT
− cos
(2π(t+ ǫ)
T− π
)∣∣∣∣t=kT
)
=A
2
(cos
(2π(t+ ǫ)
T
)∣∣∣∣t=kT
+ cos
(2π(t+ ǫ)
T
)∣∣∣∣t=kT
)
= A cos
(2π(t+ ǫ)
T
)∣∣∣∣t=kT
= A cos
(2πǫ
T+ 2πk
). (A.2)
I termini zβ (kT/4; ǫ), con β = {1, 2, 3, 4}, sono stati definiti nella (2.4) e di
seguito se ne calcola il valore di aspettazione
E {z1 (t; ǫ)} = E{|y (t; ǫ)|2
}
= E{|s (t; ǫ)|2
}+ E
{|n (t)|2
}
= E {s (t; ǫ) s∗ (t; ǫ)}+Rn(0)
= C2
∞∑
i=−∞
v2 (t− iT + ǫ) +Rn(0)
=A
2cos
(2π(t+ ǫ)
T
)+ A0 +Rn(0) (A.3)
ed analogamente
E {z3 (t; ǫ)} =A
2cos
(2π(t− T/2 + ǫ)
T
)+ A0 +Rn(0) . (A.4)
Le ampiezze costanti A ed A0 sono ottenibili come
A =
∣∣∣∣∣4C2
T
∫ T−1
0
V (β)V ∗
(1
T− β
)dβ
∣∣∣∣∣ (A.5)
A0 =
∣∣∣∣∣4C2
T
∫ T−1
0
V (β)V ∗(−β)dβ∣∣∣∣∣ , (A.6)
83

con C2 pari a E{|ci|2}, con l’apice ∗ ad indicare il complesso coniugato e con
V (f) risposta in frequenza della cascata di filtro in trasmissione e pre-filtro
in ricezione. Il termine Rn(0) indica l’autocorrelazione di n(t) valutata in 0,
ossia vale E{|n (t)|2
}.
Analogamente a quanto eseguito per E{xℜ(kT ; ǫ)}, si puo calcolare il
valore medio di xℑ(kT ; ǫ) e si ottiene
E {xℑ(kT ; ǫ)} = E {xℑ(t; ǫ)|t=kT}
= A cos
(2π(ǫ− T/4)
T+ 2πk
)
= A cos
(2πǫ
T− π
2+ 2πk
)
= A sin
(2πǫ
T+ 2πk
)
= A sin
(2πǫ
T
). (A.7)
84
Appendice B
Autocorrelazione e densita
spettrale di potenza del rumore
di fase nel sincronizzatore di
Oerder e Meyr
In questa appendice si ricavano le formule (2.38) e (2.39) ed i termini presenti
nell’equazione (2.21), necessari per ottenere la densita spettrale di potenza
del rumore di fase nel sincronizzatore dell’istante di simbolo di Oerder e Meyr
(O&M) presentato in Fig.2.4.
B.1 Definizioni utili
Si consideri un sistema con modulazione M − QAM o M − PSK 1, i
cui simboli della costellazione complessa sono {ci}. Sia n(t) il contributo di
rumore additivo a valle del pre-filtro in ricezione, come indicato nell’equazione
(2.3).
1Si precisa che l’intera analisi e stata pensata per M maggiore di 2. Pertanto nel caso
di BPSK sara necessario adattare in modo opportuno i termini delle equazioni (B.7) e
(B.8).
85

B.1. Definizioni utili
Si introducono alcune definizioni e si riportano alcune considerazioni utili,
che verranno utilizzate nel corso di questa appendice:
ci = ai + jbi (B.1)
E{ci n(t)} = 0 (B.2)
E{ci} = 0 (B.3)
E{ci c∗l } = C2 δil (B.4)
E{ci cl} = 0 (B.5)
E{ci c∗l cp c∗q} =
C4 se i = l = p = q
C22 se i = l 6= p = q
C22 se i = q 6= l = p
0 altrimenti
(B.6)
C2 = A2 +B2 = 2A2 (B.7)
C4 = A4 +B4 + 2A2B2 = 2A4 + 2A22 (B.8)
E{n∗(t)n(t+ τ)} = Rn(τ) (B.9)
σ2w = E{|w(t)|2} (B.10)
86

B.2. Autocorrelazioni e cross-correlazioni
B.2 Autocorrelazioni e cross-correlazioni
Si desidera mostrare le modalita con cui e possibile ricavare i termini di
autocorrelazione e cross-correlazione presenti nell’equazione (2.21).
L’autocorrelazione di xℑ(kT ; ǫ) si ottiene come segue
Rxℑ(mT ; ǫ) = E{x∗ℑ(kT ; ǫ) xℑ(kT +mT ; ǫ)}= E{(z2 (kT ; ǫ)− z4 (kT ; ǫ)) ·
· (z2 (kT +mT ; ǫ)− z4 (kT +mT ; ǫ))}= E{(|y(kT−T/4; ǫ)|2 − |y(kT−3T/4; ǫ)|2)·
· (|y(kT−T/4+mT ; ǫ)|2 − |y(kT−3T/4+mT ; ǫ)|2)}= E{|y(kT−T/4; ǫ)|2 · |y(kT−T/4+mT ; ǫ)|2} +
− E{|y(kT−T/4; ǫ)|2 · |y(kT−3T/4+mT ; ǫ)|2} +
− E{|y(kT−3T/4; ǫ)|2 · |y(kT−T/4+mT ; ǫ)|2} +
+ E{|y(kT−3T/4; ǫ)|2 · |y(kT−3T/4+mT ; ǫ)|2}= Rz2z2(mT ; ǫ) − Rz2z4(mT ; ǫ) +
−Rz4z2(mT ; ǫ) +Rz4z4(mT ; ǫ) , (B.11)
con zξ (kT/4; ǫ) pari a |y (kT/4− (ξ − 1)/4; ǫ)|2 con ξ = 1, 2, 3, 4.
Analogamente si ricava l’autocorrelazione di xℜ(kT ; ǫ)
Rxℜ(mT ; ǫ) = E{x∗ℜ(kT ; ǫ) xℜ(kT +mT ; ǫ)}= E{(z1 (kT ; ǫ)− z3 (kT ; ǫ)) ·
· (z1 (kT +mT ; ǫ)− z3 (kT +mT ; ǫ))}= Rz1z1(mT ; ǫ) − Rz1z3(mT ; ǫ) +
− Rz3z1(mT ; ǫ) +Rz3z3(mT ; ǫ) . (B.12)
La cross-correlazione tra xℑ(kT ; ǫ) e xℜ(kT ; ǫ) si ricava nel modo seguente
Rxℑxℜ(mT ; ǫ) = E{x∗ℑ(kT ; ǫ) xℜ(kT +mT ; ǫ)}= E{(z2 (kT ; ǫ)− z4 (kT ; ǫ)) ·
· (z1 (kT +mT ; ǫ)− z3 (kT +mT ; ǫ))}= Rz2z1(mT ; ǫ) −Rz2z3(mT ; ǫ) +
−Rz4z1(mT ; ǫ) +Rz4z3(mT ; ǫ) , (B.13)
87

B.3. Autocorrelazione Rz1z1(mT ; ǫ)
e quella tra xℜ(kT ; ǫ) e xℑ(kT ; ǫ) come segue
Rxℜxℑ(mT ; ǫ) = E{x∗ℜ(kT ; ǫ) xℑ(kT +mT ; ǫ)}= E{(z1 (kT ; ǫ)− z3 (kT ; ǫ)) ·
· (z2 (kT +mT ; ǫ)− z4 (kT +mT ; ǫ))}= Rz1z2(mT ; ǫ) −Rz1z4(mT ; ǫ) +
−Rz3z2(mT ; ǫ) +Rz3z4(mT ; ǫ) . (B.14)
B.3 Autocorrelazione Rz1z1(mT ; ǫ)
Si calcola l’autocorrelazione Rz1z1(mT ; ǫ), che costituisce uno dei quattro
termini dell’equazione (B.12):
Rz1z1(mT ; ǫ) = E{|y(kT ; ǫ)|2 · |y(kT+mT ; ǫ)|2}= E{
(y2ℜ(kT ; ǫ) + y2ℑ(kT ; ǫ)
)·
·(y2ℜ(kT+mT ; ǫ) + y2ℑ(kT+mT ; ǫ)
)}
= 2E{y2ℜ(kT ; ǫ) · y2ℜ(kT+mT ; ǫ)} +
+ 2E{y2ℜ(kT ; ǫ) · y2ℑ(kT+mT ; ǫ)}= 2Rz11,ℜ·ℜ
(mT ; ǫ) + 2Rz11,ℜ·ℑ(mT ; ǫ) , (B.15)
con i pedici ℜ e ℑ utilizzati per indicare rispettivamente la sola parte reale e
immaginaria, poiche risulta piu comodo procedere calcolando separatamente
i due contributi come scritti nell’ultima riga della (B.15).
88

B.3. Autocorrelazione Rz1z1(mT ; ǫ)
Calcolo di Rz11,ℜ·ℜ(mT ; ǫ)
Si ha
Rz11,ℜ·ℜ(mT ; ǫ) = E{y2ℜ(kT ; ǫ) · y2ℜ(kT+mT ; ǫ)}
= E{s2ℜ(kT ; ǫ) · s2ℜ(kT+mT ; ǫ)} +
+ E{s2ℜ(kT ; ǫ) · n2ℜ(kT+mT )} +
+ E{n2ℜ(kT ) · s2ℜ(kT+mT ; ǫ)} +
+ E{n2ℜ(kT ) · n2
ℜ(kT+mT )} +
+ 4E{sℜ(kT ; ǫ) · nℜ(kT )·· sℜ(kT+mT ; ǫ) · nℜ(kT+mT )} . (B.16)
Nella (B.16) il quarto termine rappresenta il contributo NxN, il secondo,
il terzo e l’ultimo rappresentano invece il contributo SxN, mentre il primo
termine rappresenta la parte SxS (self-noise). Di seguito le tre componenti
vengono valutate singolarmente.
Il termine NxN si ottiene come
Rz11,ℜ·ℜ,N×N(mT ) = E{n2ℜ(kT ) · n2
ℜ(kT+mT )}= E{n2
ℜ(kT )} · E{n2ℜ(kT +mT )} +
+ 2(E{nℜ(kT ) · nℜ(kT +mT )})2
= R2n11,ℜ
(0) + 2R2n11,ℜ
(mT ) , (B.17)
essendo nℜ stazionario ed avendo utilizzato la seguente proprieta
date le variabili gaussiane X, Y,W, Z
E{XYWZ} = E{XY }·E{WZ}+ E{XW}·E{YZ}+ E{XZ}·E{YW} .(B.18)
89

B.3. Autocorrelazione Rz1z1(mT ; ǫ)
Nella (B.17) il termine Rn11,ℜ(mT ) vale
Rn11,ℜ(mT ) = E{nℜ(kT )nℜ(kT +mT )}
= E
{(∞∑
ξ=−∞
wℜ
(kT − ξT
4
)p
(ξT
4
))·
·(
∞∑
l=−∞
wℜ
(kT +mT − lT
4
)p
(lT
4
))}
=
∞∑
ξ=−∞
∞∑
l=−∞
E
{wℜ
(kT − ξT
4
)wℜ
(kT +mT − lT
4
)}·
· p(ξT
4
)p
(lT
4
)
=σ2w
2
∞∑
ξ=−∞
p
(ξT
4
)p
(ξT
4+mT
). (B.19)
Il termine SxN si ottiene come
Rz11,ℜ·ℜ,S×N(mT ; ǫ) = E{s2ℜ(kT ; ǫ) · n2ℜ(kT+mT )} +
+ E{n2ℜ(kT ) · s2ℜ(kT+mT ; ǫ)} +
+ 4E{sℜ(kT ; ǫ) · nℜ(kT )·· sℜ(kT+mT ; ǫ) · nℜ(kT+mT )}
= E{s2ℜ(kT ; ǫ)} ·E{n2ℜ(kT+mT )} +
+ E{n2ℜ(kT )} · E{s2ℜ(kT+mT ; ǫ)} +
+ 4E{sℜ(kT ; ǫ) · sℜ(kT+mT ; ǫ)}·· E{nℜ(kT ) · nℜ(kT+mT )}
= A2Rn11,ℜ(0)
∞∑
i=−∞
v2(iT+ǫ)+
+ A2Rn11,ℜ(0)
∞∑
i=−∞
v2(iT+ǫ+mT )+
+ 4Rn11,ℜ(mT )Rs11,ℜ(mT ; ǫ) , (B.20)
90
B.3. Autocorrelazione Rz1z1(mT ; ǫ)
con
E{s2ℜ(kT ; ǫ)} = E
{(∞∑
i=−∞
ai v(kT−iT+ǫ))
·(
∞∑
l=−∞
al v(kT−lT+ǫ))}
=
∞∑
j=−∞
∞∑
p=−∞
E{ak−jak−p}v(jT+ǫ)v(pT+ǫ)
=∞∑
i=−∞
A2 v2(iT+ǫ) (B.21)
e con
Rs11,ℜ(mT ; ǫ ) = E{sℜ(kT ; ǫ) · sℜ(kT+mT ; ǫ)}
= E
{∞∑
i=−∞
ai v(kT−iT+ǫ) ·∞∑
l=−∞
al v(kT−lT+mT+ǫ)}
=∞∑
j=−∞
∞∑
p=−∞
E{ak−jak−p}v(jT+ǫ)v(pT+mT+ǫ)
=
∞∑
i=−∞
A2 v(iT+ǫ) v(iT+mT+ǫ) . (B.22)
91

B.3. Autocorrelazione Rz1z1(mT ; ǫ)
Il termine SxS si ottiene come
Rz11,ℜ·ℜ,S×S(mT ; ǫ) = E{s2ℜ(kT ; ǫ) · s2ℜ(kT+mT ; ǫ)}
= E
{∞∑
i=−∞
ai v(kT+ǫ−iT )∞∑
l=−∞
al v(kT+ǫ−lT )·
·∞∑
p=−∞
ap v(kT+ǫ−pT +mT )·
·∞∑
q=−∞
aq v(kT+ǫ−qT +mT )
}
=∞∑
j=−∞
∞∑
ξ=−∞
∞∑
γ=−∞
∞∑
ρ=−∞
E{ak−jak−ξak−γak−ρ}·
· v(jT+ǫ) v(ξT+ǫ) v(γT+ǫ+mT ) v(ρT+ǫ+mT )
= A4
∑
i
v2(iT+ǫ) v2(iT+ǫ+mT ) +
+ A22
∑
i
∑
l 6=i
v2(iT+ǫ) v2(lT+ǫ+mT ) +
+ 2A22
∑
i
v(iT+ǫ) v(iT+ǫ+mT )·
·∑
l 6=i
v(lT+ǫ) v(lT+ǫ+mT )
= (A4 − 3A22)∑
i
v2(iT+ǫ) v2(iT+ǫ+mT ) +
+ A22
∑
i
∑
l
v2(iT+ǫ) v2(lT+ǫ+mT ) +
+ 2A22
∑
i
v(iT+ǫ) v(iT+ǫ+mT )·
·∑
l
v(lT+ǫ) v(lT+ǫ+mT )
= (A4 − 3A22)∑
i
v2(iT+ǫ) v2(iT+ǫ+mT ) +
+ A22
∑
i
∑
l
v2(iT+ǫ) v2(lT+ǫ+mT ) +
+ 2R2s11,ℜ
(mT ; ǫ) . (B.23)
92

B.4. Altre autocorrelazioni e cross-correlazioni Rzizj(mT ; ǫ)
Calcolo di Rz11,ℜ·ℑ(mT ; ǫ)
Analogamente si ha
Rz11,ℜ·ℑ(mT ; ǫ) = E{y2ℜ(kT ; ǫ) · y2ℑ(kT+mT ; ǫ)}
= E{s2ℜ(kT ; ǫ) · s2ℑ(kT+mT ; ǫ)} +
+ E{s2ℜ(kT ; ǫ) · n2ℑ(kT+mT )} +
+ E{n2ℜ(kT ) · s2ℑ(kT+mT ; ǫ)} +
+ E{n2ℜ(kT ) · n2
ℑ(kT+mT )} +
+ 4E{sℜ(kT ; ǫ) · nℜ(kT )·· sℑ(kT+mT ; ǫ) · nℑ(kT+mT )} . (B.24)
Il termine NxN risulta
Rz11,ℜ·ℑ,N×N(mT ) = Rn11,ℜ(0) · Rn11,ℑ
(0)
= R2n11,ℜ
(0) . (B.25)
Il termine SxN vale
Rz11,ℜ·ℑ,S×N(mT ; ǫ) = A2Rn11,ℜ(0)
∞∑
i=−∞
v2(iT+ǫ)+
+ A2Rn11,ℜ(0)
∞∑
i=−∞
v2(iT+mT+ǫ) . (B.26)
Ed infine il termine SxS e
Rz11,ℜ·ℑ,S×S(mT ; ǫ) = A22
∑
i
∑
l
v2(iT+ǫ) v2(lT+mT+ǫ) . (B.27)
B.4 Altre autocorrelazioni e cross-correlazioni
Rzizj(mT ; ǫ)
Per brevita si omette il calcolo degli altri quindici termini Rzizj(mT ; ǫ),
ricavabili in modo analogo a quanto effettuato per Rz1z1(mT ; ǫ) nelle pagine
precedenti. Di seguito, pertanto, viene riportato solamente il risultato delle
autocorrelazioni Rzizj (mT ; ǫ), con i, j = {1, 2, 3, 4}.
93

B.4. Altre autocorrelazioni e cross-correlazioni Rzizj(mT ; ǫ)
• Se i ≥ j allora i contributi NxN, SxN e SxS di Rzizj (mT ; ǫ) sono i
seguenti:
Rzizj ,N×N(mT ) = 4Rnii,ℜ(0) · Rnjj,ℜ
(0) + 4R2nij,ℜ
(mT ) (B.28)
Rzizj ,S×N(mT ; ǫ) = 4A2Rnjj,ℜ(0)
∞∑
i=−∞
v2(iT−T/4(i− 1)+ǫ)+
+ 4A2Rnii,ℜ(0)
∞∑
i=−∞
v2(iT−T/4(j − 1)+ǫ+mT )+
+ 8Rnij,ℜ(mT )Rsij,ℜ(mT ; ǫ) (B.29)
Rzizj ,S×S(mT ; ǫ) = 2(A4 − 3A22)
∞∑
i=−∞
v2(iT−T/4(i− 1)+ǫ) ·
· v2(iT−T/4(j − 1)+ǫ+mT ) +
+ 4A22
∞∑
i=−∞
∞∑
l=−∞
v2(iT−T/4(i− 1)+ǫ) ·
· v2(lT−T/4(j − 1)+ǫ+mT ) +
+ 4R2sij,ℜ
(mT ; ǫ) (B.30)
con
Rnij,ℜ(mT ) =
σ2w
2
∞∑
ξ=−∞
p
(ξT
4
)p
(ξT
4− T
4(j − i) +mT
)(B.31)
Rsij,ℜ(mT ; ǫ ) =
∞∑
i=−∞
A2 v(iT−T/4(i− 1)+ǫ) ·
· v(iT−T/4(j − 1)+mT+ǫ) ; (B.32)
• se i < j invece:
Rzizj (mT ; ǫ) = Rzjzi(−mT ; ǫ) . (B.33)
94

B.5. Approssimazione del contributo SxS
B.5 Approssimazione del contributo SxS
Nelle equazioni (2.38) e (2.39) si osserva che i termini Rψ,S×S(mT ; ǫ) e
Rψ,S×S(mT ) sono necessari per il calcolo di βSxS(ǫ) e di βSxS, fondamentali
per approssimare la densita spettrale di potenza del self-noise. Si considerino,
pertanto, le equazioni (2.19), (2.21) e (2.25).
Si definisce
qm(iT ) = v(iT )v(iT +mT ) (B.34)
e si calcola
Rψ,S×S(mT ; ǫ) =1
A2
[R1(mT ; ǫ) sin
2
(2πǫ
T
)+
+R1(mT ; ǫ−T/4) cos2(2πǫ
T
)+
−1
2(R2(mT ; ǫ) +R2(−mT ; ǫ)) sin
(4πǫ
T
)](B.35)
e
Rψ,S×S(mT ) =2R1(mT )− R2(mT )−R2(−mT )
A2. (B.36)
I termini Ri(mT ) e Ri(mT ; ǫ), con i = {1, 2}, presenti nelle equazioni prece-
denti, risultano essere
R1(mT ) =1
T
∫ T
0
R1(mT;ǫ) sin2
(2πǫ
T
)dǫ (B.37)
R2(mT ) =1
T
∫ T
0
R2(mT;ǫ) sin
(2πǫ
T
)cos
(2πǫ
T
)dǫ (B.38)
R1(mT ; ǫ) = 2(A4 − 3A22)R1,a(mT ; ǫ)+
+ 4A22R1,b(mT ; ǫ) + 4A2
2R1,c(mT ; ǫ) (B.39)
R2(mT ; ǫ) = 2(A4 − 3A22)R2,a(mT ; ǫ)+
+ 4A22R2,b(mT ; ǫ) + 4A2
2R2,c(mT ; ǫ) . (B.40)
95

B.5. Approssimazione del contributo SxS
I tre contributi dell’equazione (B.39) vengono valutati di seguito
R1,a(mT;ǫ) =∑
i
q2m(iT+ǫ) +∑
i
q2m(iT+ǫ−T/2)+
−∑
i
q2m−1/2(iT+ǫ)−∑
i
q2−m−1/2(iT+ǫ) , (B.41)
R1,b(mT;ǫ) =∑
i
q0(iT+ǫ)∑
l
q0(lT+mT+ǫ)+
+∑
i
q0(iT+ǫ−T/2)∑
l
q0(lT+mT+ǫ−T/2)+
−∑
i
q0(iT+ǫ)∑
l
q0(lT+mT+ǫ−T/2)+
−∑
i
q0(iT+ǫ)∑
l
q0(lT−mT+ǫ−T/2) , (B.42)
e
R1,c(mT;ǫ) =
(∑
i
qm(iT+ǫ)
)2
+
(∑
i
qm(iT+ǫ−T/2))2
+
−(∑
i
qm−1/2(iT+ǫ)
)2
−(∑
i
q−m−1/2(iT+ǫ)
)2
. (B.43)
I tre contributi dell’equazione (B.40) risultano invece
R2,a(mT;ǫ) =∑
i
q2m−1/4(iT+ǫ) +∑
i
q2m−1/4(iT+ǫ−T/2)+
−∑
i
q2m−3/4(iT+ǫ)−∑
i
q2−m−1/4(iT+ǫ−T/4) , (B.44)
R2,b(mT;ǫ) =∑
i
q0(iT+ǫ)∑
l
q0(lT+mT+ǫ−T/4)+
+∑
i
q0(iT+ǫ−T/2)∑
l
q0(lT+mT+ǫ−3T/4)+
−∑
i
q0(iT+ǫ)∑
l
q0(lT+mT+ǫ−3T/4)+
−∑
i
q0(iT+ǫ−T/4)∑
l
q0(lT−mT+ǫ−T/2) , (B.45)
96

B.5. Approssimazione del contributo SxS
e
R2,c(mT;ǫ) =
(∑
i
qm−1/4(iT+ǫ)
)2
+
(∑
i
qm−1/4(iT+ǫ−T/2))2
+
−(∑
i
qm−3/4(iT+ǫ)
)2
−(∑
i
q−m−1/4(iT+ǫ−T/4))2
. (B.46)
97

Appendice C
Post-filtro ottimo per il
sincronizzatore di Oerder e
Meyr
In questa appendice si ricava, per il sincronizzatore di simbolo di Oerder e
Meyr, la risposta in frequenza del post-filtro ottimo, il quale permette di
minimizzare l’errore quadratico medio (MSE) di stima della fase desiderata.
Infatti, si ricorda, lo scopo e stimare il rumore di fase tempo-variante θk, dal
quale estrarre il ritardo ǫk, necessario per il passo di correzione, ossia per
ricampionare il segnale ricevuto negli istanti ottimali.
Per comodita si lavora nel dominio z.
Si riportano di seguito le equazioni (3.5) e (3.6), necessarie per il calcolo di
Hottimo(z): la densita spettrale di potenza della fase θ e
Sθ(z) =γ2
(1− z)(1 − z−1), (C.1)
mentre la densita spettrale di potenza del rumore ψ e
Sψ(z) ≃ βN×N + βS×N + βS×S(1− z)(1− z−1) ; (C.2)
si rimanda invece al Capitolo 2 per βN×N , βS×N e βS×S.
Per ricavare la funzione di trasferimento del post-filtro ottimo si segue esat-
tamente la teoria di Wiener nella sua formulazione non causale, dato che il
98

sincronizzatore di Oerder e Meyr non ha vincoli di causalita, essendo non
retroazionato.
Pertanto si calcola
Sθ(z) + Sψ(z) =β[γ2
β+ N0
β(1− z)(1 − z−1) + (1− z)2(1− z−1)2
]
(1− z)(1− z−1)
=β(z − z1)(z − z2)(z − z3)(z − z4)
z2(1− z)(1 − z−1)
=β(−z3)(−z4)(1− z1z
−1)(1− z2z−1)(1− z−1
3 z)(1 − z−14 z)
(1− z)(1 − z−1)
=β(1− z1z
−1)(1− z2z−1)(1− z∗1z)(1− z∗2z)
z∗1z∗2(1− z)(1 − z−1)
=(1− z1z
−1)(1− z2z−1)(1− z∗1z)(1 − z∗2z)
ξ2(1− z)(1 − z−1)(C.3)
con
ξ =
√z∗1z
∗2
β=
√z1z2β
(C.4)
z1 = − 1
2√2
√− N3
0
β2P+N2
0
β2+
4N0(γ2 −N0)
βP+
16γ2
P+
4N0 − 2γ2
β+
− P +Q
4β, (C.5)
z2 = −1
2
√Q2
2β2+
1
2P
(−Q
3
β2+
4QR
β− 8Q
)− R
2− 2 +
P −Q
4β, (C.6)
z3 = z−∗1 =
1
z∗1, (C.7)
z4 = z−∗2 =
1
z∗2, (C.8)
dove β = βS×S, N0 = βN×N + βS×N , P =√N2
0 − 4βγ2, Q = −4β − N0 e
R = 6β + γ2 + 2N0.
Il filtro ottimo e ottenibile, quindi, nel seguente modo
Hottimo(z) =Sθ(z)
Sθ(z) + Sψ(z)
=γ2ξ2
(1− z1z−1)(1− z2z−1)(1− z∗1z)(1− z∗2z). (C.9)
99

Appendice D
Autocorrelazione e densita
spettrale di potenza del rumore
di fase SxS nel sincronizzatore
di Gardner
In questa appendice si ricavano l’autocorrelazione della (4.15), la densita
spettrale di potenza della (4.16) ed il valore di βS×S,GA della (4.18) per il
sincronizzatore di simbolo di Gardner, presentato in Fig.4.2.
D.1 Autocorrelazione e densita spettrale di
potenza
Si consideri un sistema con modulazione M −QAM o M −PSK, con {ci}i simboli della costellazione complessa, g(t) risposta all’impulso del filtro in
trasmissione (con risposta in frequenza del tipo radice di coseno rialzato) e
p(t) pre-filtro adattato (MF) in ricezione. Si utilizzano le stesse definizioni
presentate nella sezione B.1, le quali non vengono riscritte per brevita.
Il TED del sincronizzatore di Gardner fornisce in uscita l’errore di sin-
cronismo
ek = ℜ{y∗(kT − T/2; ǫk − ǫk)(y(kT ; ǫk − ǫk)− y(kT − T ; ǫk − ǫk))} , (D.1)
100

D.1. Autocorrelazione e densita spettrale di potenza
come indicato nell’equazione (4.5). Ipotizzando rumore additivo nullo, in
modo da selezionare il solo contributo di rumore dovuto al self-noise, e ri-
cordando che ǫk − ǫk −→ 0 in fase di tracking, e possibile riscrivere l’errore
come segue
ek = ℜ{
∞∑
i=−∞
c∗i v∗(kT − iT − T/2)·
·(
∞∑
l=−∞
clv(kT − lT )−∞∑
p=−∞
cpv(kT − pT − T )
)}
= ℜ{
∞∑
q=−∞
c∗k−qv∗(qT − T/2)·
·(
∞∑
ξ=−∞
ck−ξv(ξT )−∞∑
ζ=−∞
ck−ζv(ζT − T )
)}
= ℜ{(ck − ck−1) ·
∞∑
q=−∞
c∗k−qv∗(qT − T/2)
}
= (ak − ak−1) ·∞∑
i=−∞
ak−i v(iT − T/2) +
+ (bk − bk−1) ·∞∑
i=−∞
bk−i v(iT − T/2) (D.2)
con v(t) filtro la cui risposta in frequenza e a coseno rialzato, poiche dovuto
alla cascata del filtro g(t) e del pre-filtro p(t) ad esso adattato; si ricorda che
v(kT ) risulta diverso da 0 solo per k pari a 0, in corrispondenza del quale
assume invece valore unitario.
Percio l’autocorrelazione di ek, dopo semplici passaggi matematici omessi per
101

D.1. Autocorrelazione e densita spettrale di potenza
brevita, risulta
Re,S×S(mT ) = E{ek · ek+m}
= δ(mT ) ·[B v2
(T
2
)+ C
∞∑
l=−∞
v2(lT−T
2
)]+
+ (δ(mT − T ) + δ(mT + T )) ·
·[B
2v2(T
2
)+C
2
∞∑
l=−∞
v
(lT−T
2
)v
(lT+
T
2
)]+
+∞∑
l=−∞
δ(mT − lT ) · C2
[v
(mT+
T
2
)−v(mT−T
2
)]2, (D.3)
con
B = 4(A4 − 3A2
2
)(D.4)
C = 4A22 . (D.5)
L’autocorrelazione del rumore di fase dovuta al self-noise quindi e
Rψ,S×S,GA(mT ) =1
A2GA
Re,S×S(mT ) (D.6)
e da essa si ottiene la densita spettrale di potenza del contributo SxS, ossia
Sψ,S×S,GA(ej2πfT ) = Fm{Rψ,S×S,GA(mT )}
=1
A2GA
{[B v2
(T
2
)+ C
∞∑
l=−∞
v2(lT−T
2
)]+
+
[B v2
(T
2
)+ C
∞∑
l=−∞
v
(lT−T
2
)v
(lT+
T
2
)]cos(2πfT ) +
+C∞∑
l=1
[v
(lT+
T
2
)−v(lT−T
2
)]2cos(2πflT )
}. (D.7)
102
D.2. Approssimazione della densita spettrale di potenza SxS
D.2 Approssimazione della densita spettrale
di potenza SxS
Il termine Sψ,S×S,GA(ej2πfT ) esibisce una pendenza di 20 dB/decade alle fre-
quenze di interesse, ossia alle basse frequenze che verranno selezionate dal
post-filtro passa-basso. Pertanto e stata introdotta l’approssimazione
Sψ,S×S,GA(ej2πfT ) = βS×S,GA(1− ej2πfT )(1− e−j2πfT ) . (D.8)
Per ricavare il valore opportuno di βS×S,GA e stato imposto
Sψ,S×S,GA(ej2πfT )|f→0+ = Sψ,S×S,GA(e
j2πfT )|f→0+ , (D.9)
ottenendo di conseguenza il valore corretto di βS×S,GA, ossia
βS×S,GA =1
2A2GA
(G+
∞∑
l=1
l2Hl
)(D.10)
con
G =
[B v2(T/2) + C
∞∑
l=−∞
v(lT − T/2) v(lT + T/2)
](D.11)
Hl = C [ v(lT + T/2)− v(lT − T/2) ]2 . (D.12)
103

Appendice E
Post-filtro ottimo per il
sincronizzatore di Gardner
In questa appendice viene ricavata la funzione di trasferimento del post-
filtro ottimo per il sincronizzatore di Gardner, in presenza di rumore di fase
tempo-variante, quando il pre-filtro e quello adattato al filtro in trasmissione.
Per comodita si lavora nel dominio z.
La fattorizzazione spettrale scritta nell’equazione (4.28), necessaria per il
calcolo della (4.27), e ottenibile in modo analogo a quanto fatto per la pro-
gettazione del post-filtro ottimo per il sincronizzatore feedforward di Oerder
e Meyr (O&M), pertanto non viene eseguita nuovamente; la derivazione puo
essere trovata in (C.3).
Si ricava, invece, la funzione di trasferimento di F (z). In base alla teoria
della predizione lineare con vincolo di causalita, F (z) coincide con la parte
causale della trasformata della cross-correlazione tra la sequenza sbiancata
in ingresso a F (z) e la sequenza desiderata. Nel caso in esame quindi si ha
F (z) = [Sθ(z)W∗(z−∗)]+ =
[ξγ2
(1− z−1)(1− z∗1z)(1 − z∗2z)
]+. (E.1)
Il termine 1/(1− z−1) e la trasformata Z di un gradino causale di ampiezza
unitaria u(n), mentre 1/(1 − az) (con a = {z∗1 , z∗2}) e la trasformata di un
termine anticausale del tipo a−nu(n). La convoluzione tra i due termini
anticausali da luogo ad un termine anch’esso anticausale; la convoluzione
104

di quest’ultimo con u(n) fornisce un risultato causale ed anticausale, la cui
parte causale e pero costante, pari a ζ2u(n). La definizione di F (z) impone di
prelevare la sola parte 1-causale, cioe ζ2u(n−1), che nel dominio trasformato
risulta ζ2z−1/(1− z−1), e quindi si giunge a
F (z) =ξγ2ζ2z−1
(1− z−1). (E.2)
E necessario determinare il valore della costante ζ2. Essa coincide con l’in-
tegrale della convoluzione tra i due termini anticausali a−nu(n), con a =
{z∗1 , z∗2}. Ossia, nel dominio trasformato
ζ2 =1
(1− z∗1z)· 1
(1− z∗2z)
∣∣∣∣z=1
=1
(1− z∗1)(1− z∗2). (E.3)
Si puo osservare che ζ2 e pari anche a (γξ)−1. Si giunge quindi alla funzione
di trasferimento ottima del filtro d’anello
Hott,GA,MF(z) =W (z)F (z) =ξγz−1
(1− z1z−1)(1− z2z−1). (E.4)
La funzione di trasferimento del filtro ad anello aperto e invece
LMF(z) =Hott,GA,MF(z)
1−Hott,GA,MF(z), (E.5)
per cui e necessario calcolare
1−Hott,GA,MF(z) =(1− z1z
−1)(1− z2z−1)− ξγz−1
(1− z1z−1)(1− z2z−1)
=z1z2
[z−2 − z1 + z2 + γξ
z1z2z−1 + 1
z1z2
]
(1− z1z−1)(1− z2z−1)
=z1z2(z
−1 − x1)(z−1 − x2)
(1− z1z−1)(1− z2z−1)
=z1z2(−x1)(−x2) (1− x−1
1 z−1)(1− x−12 z−1)
(1− z1z−1)(1− z2z−1), (E.6)
con
x−11 = 1 (E.7)
x−12 =
2z1z2√(−z1 − z2 − γξ)2 − 4z1z2 + z1 + z2 + γξ
= zp . (E.8)
105
Percio la funzione di trasferimento del filtro ottimo ad anello aperto vale
LMF(z) =ξγz−1
z−1p z1z2(1− z−1)(1− zpz−1)
. (E.9)
106
Bibliografia
[1] M. Oerder and H. Meyr, “Digital filter and square timing recovery”,
IEEE Transactions on Communications, vol. 36, no. 5, pp. 605–612,
May 1988.
[2] F. M. Gardner, “A BPSK/QPSK timing error detector for sampled recei-
vers”, IEEE Transactions on Communications, vol.34, no.5, pp. 423-429,
May 1986.
[3] Y. Wang, E. Serpedin and P. Ciblat, “An Alternative Blind Feedfor-
ward Symbol Timing Estimator Using Two Samples per Symbol”, IEEE
Transactions on Communications, vol. 51, no. 9, September 2003.
[4] A. D’Andrea and U. Mengali, “Performance analysis of the delay-line
clock regenerator”, IEEE Transactions on Communications, vol. COM-
34, pp. 321–328, April 1986.
[5] K. Shi, Y. Wang, and E. Serpedin, “On the design of a digital blind
feedforward, nearly jitter-free timing-recovery scheme for linear modu-
lations”, IEEE Transactions on Communications, vol. 52, no. 9, pp.
1464-1469, September 2004.
[6] W. Gappmair, “Self-noise performance of zero-crossing and Gardner
synchronisers applied to one/two-dimensional modulation schemes”,
Electronics Letters, vol. 40, no.16, pp. 1010-1011, 2004.
[7] L E. Franks and J. P. Bubrouski, “Statistical properties of timing
jitter in a PAM timing recovery scheme”, IEEE Transactions on
Communications, vol. COM-22, pp. 913-920, July 1974.
107

BIBLIOGRAFIA
[8] S.J. Lee, “A new non-data-aided feedforward symbol timing estimator
using two samples per symbol”, IEEE Commununications Letters, vol.
6, pp. 205–207, May 2002.
[9] A. N. D’Andrea and M. Luise, “Design and analysis of a jitter-
free clock recovery scheme for QAM systems”, IEEE Transactions on
Communications, vol. 41, pp. 1296-1299, September 1993.
[10] A. Spalvieri and M. Magarini, “Minimum timing jitter in timing recovery
based on pre-filtered square-law timing detection”, in Proc. 2nd CTRQ,
Colmar, France, pp. 46–51, July 2009.
[11] L. Barletta, R. Disaro, M. Magarini and A. Spalvieri, “Post-filter op-
timization in timing recovery based on square-law detection”, IEEE
Photonics Technology Letters, vol. 25, no. 9, pp. 821–824, May 2013.
[12] L. Barletta, M. Magarini, F. Scardoni and A. Spalvieri, “Impact of
Loop Delay on the Performance of Gardner Timing Recovery”, IEEE
Photonics Technology Letters, vol. 25, no. 18, pp. 1797-1800, 2013.
[13] A. Spalvieri and M. Magarini, “Wiener’s analysis of the discrete-time
phase-locked loop with loop delay”, IEEE Transactions on Circuits and
Systems II, Express Briefs, vol. 55, no. 6, pp. 596–600, June 2008.
108