preliminary planning for an international mars sample...
TRANSCRIPT

Preliminary Planning for an InternationalMars Sample Return MissionReport of the International Mars Architecture for the Return of Samples (iMARS) Working GroupJune 1, 2008

Caption for cover images:Left: Artist’s conception of the Mars Ascent Vehicle lifting off of the martian surface. Image credit: ESA.
Middle: Sampling sites across stratigraphy encountered on Mars by the Opportunity rover. This is an excellent illustration of the concept of a suite of samples of known geologic context, which has far greater scientifi c value than individual samples without context. (Image details: False color Pancam mosaic acquired by the Opportunity rover on Sol 173 using the 753nm, 535 nm and 432 nm fi lters. The image shows the ingress route into Endurance crater. The false color rendering highlights the sedimentary layering and locations examined by the rover’s contact instrument suite (rock abrasion tool, APXS, Mössbauer and microscopic imager.) Image provided by Dr. Scott McLennan.
Right: Artist’s conception of the Mars Exploration Rover. It seems likely that a rover of similar size and capability would best meet the needs of Mars sample return. Image credit: NASA/JPL.

Cha
pte
r Ti
tle
1
Preliminary Planning for an International Mars Sample Return MissionReport of the iMARS (International Mars Architecture for the Return of Samples) Working Group
National DelegatesBeaty, David (USA), iMARS co-chair Grady, Monica (UK), iMARS co-chair and Science subteam chairMoura, Denis JP (France/Italy), Engineering subteam chair Walter, Malcolm (Australia) Muller, Christian (Belgium) Daerden, Frank (Belgium) Hipkin, Victoria (Canada) Bibring, Jean-Pierre (France) Flamini, Enrico (Italy) Ori, Gian Gabriele (Italy) Kato, Manabu (Japan) Hode, Tomas (Sweden) Mani, Peter (Switzerland)Bridges, John (UK) Jordan, Frank (USA)
Agency ParticipantsKminek, Gerhard (ESA), Facilities/Planetary Protection subteam chair Gardini, Bruno (ESA), Member—IMEWG McCuistion, J. Douglas (NASA), Member—IMEWGKhan, Michael (ESA)Pradier, Alain (ESA)Santovincenzo, Andrea (ESA) Conley, Catharine (NASA) May, Lisa (NASA)Meyer, Michael (NASA)
Technical ParticipantsFisackerly, Richard (ESA, technology planning) Westall, Frances (France, sample science)Allen, Carlton (USA, curation facility planning)Buxbaum, Karen (USA, planetary protection planning)Hayati, Samad (USA, technology planning)Mattingly, Richard (USA, system engineering)Stabekis, Pericles (USA, planetary protection planning)
Correspondence authors: Inquiries should be directed to David Beaty ([email protected], +1 818 354-7968), Monica Grady ([email protected], +44 1908 659251), Lisa May ([email protected], +1 202 358-2411), or Bruno Gardini ([email protected], +31 71 565 3849).
The iMARS Working Group

2C
hap
ter
Title
Preliminary Planning for an InternationalMars Sample Return Mission
TABLE OF CONTENTS
Executive Summary
I. Introduction
II. Science Objectives
III. High-level Requirements
IV. Implementation of Mars Sample Return
V. Development Timeline
VI. Management Planning
VII. Public Outreach and Education
VIII. Conclusions and Next Steps
Acknowledgements, References, and Appendices
1
2
6
10
14
26
32
36
38
43

1
Executive Summary
The international Mars Architecture for the Return of Samples (iMARS) Working Group was chartered by the Inter-national Mars Exploration Working Group (IMEWG) in mid-2006 to develop a potential plan for an internationally sponsored and executed Mars sample return (MSR) mission. Its purpose is to outline the scientifi c and engineering requirements of such an international mission in the 2018–2023 time frame. The Terms of Reference of iMARS are given in Appendix I.
This report is a summary of Phase I of iMARS’ efforts, which were carried out between September 2007, and May 2008. Over this period, the iMARS team developed: scientifi c objectives; an understanding of the kinds, quantities, and conditions of samples needed to achieve those objectives; draft requirements associated with the objectives; analyses of fl ight and ground system implementation options and priorities to meet the requirements; a preliminary timeline for MSR for planning long-lead elements and approximate budget phasing; and an analysis of some identifi ed management issues. The result of this effort was consensus on a potential architecture for an international MSR mission, as well as several conclusions regarding MSR and the next steps to achieving it.
The team worked with and was represented on a Next-Decade Science Assessment Group (ND-SAG), which devel-oped guidance regarding the merits of different sample types to achieve high-priority Mars science goals. Engineering analysis included studies of launch opportunities and mission design, along with assessments of the requirements for mobility and time on the surface necessitated by the goal to collect diverse samples from scientifi cally important sites. The iMARS team also considered the requirements and options associated with planetary protection implementation, which will be more signifi cant for this mission than for any other ever fl own.
The primary conclusions of the iMARS analysis include:
• In order for MSR to be broadly acceptable to the international scientifi c community, it would need to be able to return carefully selected, diverse samples from Mars. It would need to return these samples in a controlled way to maintain the sample’s scientifi c integrity. These considerations have signifi cant implications for the design and operations of the end-to-end Mars sample return mission including both the fl ight and ground systems.
• Between the fl ight elements, ground systems, and scientifi c analysis, iMARS identifi ed approximately 20 primary building blocks that could be led or supported by different international participants.
• Five high-priority mission design options have been identifi ed, all of which would make use of the launch opportunities from 2018–2022. All options would involve two launches and at least one Sample Receiving Facility (SRF) certifi ed prior to return of the sample.
• The development timeline for MSR has two long-lead aspects that must be planned for: New technology development for the fl ight elements and the SRF(s), and site selection for the latter. In both cases, substantive effort must begin at least 10 years before launch of the fl ight segment.
• The iMARS architecture and plans provide a path towards a fully international, affordable MSR mission.
• Public outreach and communication require particular attention due to the nature of this mission and need to be addressed in an open and well-managed way from the very beginning.
2
I. Introduction
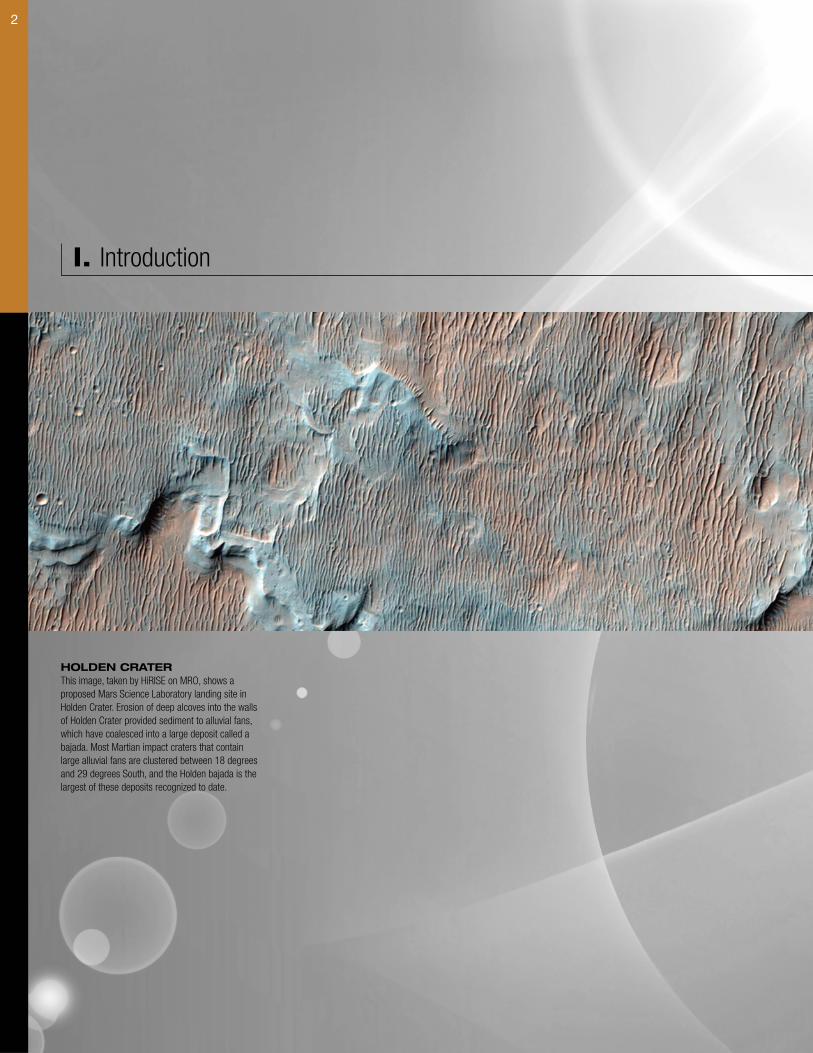
HOLDEN CRATERThis image, taken by HiRISE on MRO, shows a proposed Mars Science Laboratory landing site in Holden Crater. Erosion of deep alcoves into the walls of Holden Crater provided sediment to alluvial fans, which have coalesced into a large deposit called a bajada. Most Martian impact craters that contain large alluvial fans are clustered between 18 degrees and 29 degrees South, and the Holden bajada is the largest of these deposits recognized to date.
2

iMARS
3
Intr
oduc
tion
I-I Introduction Mars has been an object of fascination for humanity since the time of the ancients. Notable milestones have included the early telescopic observations of Galileo and Huygens, the later telescopic descriptions of the martian surface by Schiaparelli and Lowell, and the fi ctional writings of authors like Edgar Rice Burroughs. In the modern era of spacecraft-based explo-ration, since the Mariner 4 fl y-by in 1964 returned 21 images, there have been several dozen spacecraft sent to Mars, of which 15 have been successful. Public interest remains extremely high—for example, as of this writing there have been 900 million hits on the Mars Exploration Rover (MER) web site. As is typical of the progress of science, these investigations have raised more questions than they have answered. Mars remains a high-priority target for ongoing exploration for the follow-ing primary reasons:
• Mars is the most Earth-like planet in the Solar System. The fi rst 700 million years of Earth’s history are not preserved in its geologic record, but this history is preserved on Mars. Since life got started on Earth during this period of time, we have very little information about its origins and early evolution—the critical rocks are missing on our home planet. What could Mars tell us about the early evolution of water-rich terrestrial planets, and its relationship to the evolution of habitable environments?
• Of the various places of interest for evaluating whether or not life exists or has existed elsewhere in the universe, Mars is by far the most accessible. We can afford to send a regular series of missions that progressively build the exploration technology and which respond to the discoveries of previous missions. This accessibility allows us to address the life question in a systematic fashion.
• Mars is a potential target for eventual human exploration. Of our nearest planetary neighbors, Mars is the most compatible with crewed missions, and the scientifi c questions at Mars would most benefi t from the attention of human explorers.
Our current specifi c goals for Mars have been best codifi ed by the Mars Exploration Program Analysis Group (MEPAG), which has framed goals which go by the nicknames of Life, Climate, Geology, and Preparation for Human Exploration (MEPAG, 2006). These goals can be further broken down into prioritized lists of objectives and investigations. Although MEPAG is formally a part of NASA’s advisory structure, it has a long tradition of carrying out its discussions with internation-al participation—the science of Mars is something that transcends international boundaries, and the MEPAG list of scientifi c objectives has been judged to be valuable by non-US scientists.
The multiple objectives and investigations contained in the MEPAG summary could be advanced through many different kinds of missions, including orbiters, fi xed landers (e.g., Phoenix), rovers, penetrators, airplanes, and several other kinds of missions. However, it has long been recognized that the mission that would have the single greatest scientifi c return is one that would return samples from the martian surface. In fact, several of our scientifi c objectives could not be advanced at all without this mission. The National Research Council (USA) has made this case on a regular basis for at least 30 years (see NRC, 2007 and the references therein), and for this reason has consistently assigned a high priority to MSR. Similar argu-ments have been advanced within ESA (Messina et al., 2006; ESA, 2006), France (Bonneville and Favier, conclusions of the national workshop on exploration, 2007), and Italy (Colangeli et al., 2004).

4C
hap
ter
I.
For MSR to proceed and become a reality one day soon, we would need to ensure that the public under-stands our goals and priorities. It would be essential to keep the public up to date with information about the progress of the international Mars exploration program. When the Apollo samples returned to Earth in 1969, people queued up in cities all over the world to see for themselves tiny fragments of Moon rock. Even today, with all the sophisticated computer games available to them, young people are still thrilled to touch and see rocks from beyond the Earth. We must not underestimate the interest that the fi rst Mars rocks to be returned directly from the planet would engender in the general public, and the capability that an MSR mission has for inspiring interest in science and space research in students.
This StudyIn addition to the high scientifi c value of MSR, it has long been recognized that MSR also would have high cost and implementation risk. In order to be politically viable, it would probably be necessary to share the cost and risk among multiple international partners. To support possible partnership-formation discus-sions, the International Mars Exploration Working Group (IMEWG) requested the formation of a Mars Sample Return Working Group in mid-2006 (see Terms of Reference, Appendix I). When the group met for the fi rst time in September 2007, it chose for itself the name “International Mars Architecture for the Return of Samples” (iMARS). IMEWG is “an international interagency forum set up with the overall goal of fostering international scientifi c and technical cooperation for the development of Mars exploration” (IM-EWG Terms of Reference). This voluntary cooperation has provided a forum for international cooperation and dialog. The specifi c charge to iMARS was to propose an architecture and planning structure required for a fi rst truly international Mars mission.
There are many questions about conducting Mars Sample Return as an international mission, such as who is in charge? Is there a senior partner? Who does what? Who would decide where to go and what to bring back? Who would pay for it? The iMARS team, although selected to contain reasonable interna-tional and technical diversity, is a team of scientists, engineers, strategic planners, and managers, not a team of budget decision makers, diplomats, or politicians. The iMARS focus has been on developing a potential plan suitable for partnership-forming discussions for an internationally sponsored and executed Mars sample return mission. As such, the potential plans described in this report have yet to be approved for implementation by any agency or country.

5

6
NEPENTHES MENSAEThe High Resolution Stereo Camera on board ESA’s Mars Express orbiter imaged Nepenthes Mensae in a region lying at approximately 3 degrees north and 121 degrees east.
II. Science Objectives
6

iMARS
7
Sci
ence
Ob
ject
ives
2-I Introduction
There are many ways in which MSR could make a contribution to our primary goals for the exploration of Mars. However, these multiple possibilities are not of equal priority, either from the point of view of the intrinsic value of the scientifi c question, or from the point of view of the progress that might be made towards the question if samples were not returned. In addition, many relatively specifi c scientifi c questions under consideration would require relatively specifi c samples. We need to rec-ognize the dual realities that the fi rst MSR mission could not collect all of the samples that would be useful, but that it must collect samples that support enough of a diversity of investigations that broad support from the scientifi c community could be achieved. This leads to important debate regarding how broad or narrow MSR’s scientifi c objectives should be; this in turn drives the number and character of the samples needed.
2-2 Scientifi c Objectives
Eleven candidate scientifi c objectives for MSR were recently identifi ed by MEPAG ND-SAG (2008). The iMARS team con-siders ten of these to be serious candidates for the fi rst MSR mission (the eleventh relates to ice samples). However, it is important to note that the choice of landing site would play a critical role in determining how many of these objectives end up as part of the mission plan and the level of detail to which each would be pursued. These ten objectives, listed below in approximate priority order, would make an enormous contribution to our high-level goals for Mars. In each case, further detail relating to the context and the signifi cance of the objective can be found in the ND-SAG report (p. 8–12).
• Determine the chemical, mineralogical, and isotopic composition of the crustal reservoirs of carbon, nitrogen, sulfur, and other elements with which they have interacted, and characterize carbon-, nitrogen-, and sulfur-bearing phases down to submicron spatial scales, in order to document processes that could sustain habitable environments on Mars, both today and in the past.
• Assess the evidence for prebiotic processes, past life, and/or extant life on Mars by characterizing the signatures of these phenomena in the form of structure/morphology, biominerals, organic molecular and isotopic compositions, and other evidence within their geologic contexts.
• Interpret the conditions of martian water-rock interactions through the study of their mineral products.
• Constrain the absolute ages of major martian crustal geologic processes, including sedimentation, diagenesis, volcanism/plutonism, regolith formation, hydrothermal alteration, weathering, and cratering.
• Understand paleoenvironments and the history of near-surface water on Mars by characterizing the clastic and chemical components, depositional processes, and post-depositional histories of sedimentary sequences.
• Constrain the mechanism and timing of planetary accretion, differentiation, and the subsequent evolution of the martian crust, mantle, and core.
• Determine how the martian regolith was formed and modifi ed, and how and why it differs from place to place.

8C
hap
ter
II.
• Characterize the risks to future human explorers in the areas of biohazards, material toxicity, and dust/granular materials and contribute to the assessment of potential in situ resources to aid in establishing a human presence on Mars.
• For the present-day martian surface and accessible shallow subsurface environments, determine the preservation potential for the chemical signatures of extant life and prebiotic chemistry by evaluating the state of oxidation as a function of depth, permeability, and other factors.
• Interpret the initial composition of the martian atmosphere, the rates and processes of atmospheric loss/gain over geologic time, and the rates and processes of atmospheric exchange with surface condensed species.
2-3 Samples Needed to Achieve the Objectives
The wide range of potential science objectives would require the sampling of a range of lithologies—sedimentary, hydrothermal, and igneous. This arises from the variety of signifi cant processes (igneous, sedimentary, hydrothermal, aqueous alteration, etc.) that played key roles in the formation of the martian crust and atmosphere. Each process creates materials that differ in their composition, location, etc. and that collectively could be used to interpret that process. The iMARS team has defi ned a “sample suite” as the set of samples required to determine the key process(es) that formed them. Within each suite of samples, we seek to maximize variation within the class, with only a small number of samples.
There is presumably not any single landing site on Mars that could produce all of the samples necessary to support all of the above objectives. How much could be achieved at a single landing site would de-pend on the magnitude of the rover’s mobility and its ability to do scientifi c sample selection and context documentation. The landing site selection process would, therefore, be an essential part of the scientifi c planning for MSR. The NASA and ESA Mars exploration programs have put us in the position of being able to identify—and land on—the best sites.
On Earth, suites typically consist of a few to hundreds of samples, depending on the nature, scale, and detail of the process(es) being addressed. However, suites of about 5 to 8 samples represent a reason-able compromise between scientifi c needs and mission constraints for MSR samples. The following kinds of sample suites are under consideration for the iMARS reference MSR, although it would almost certainly not be possible to collect all of them during a mission to any single landing site.
• Sedimentary materials rock suite• Hydrothermal rock suite • Low-temperature altered rock suite • Igneous rock suite • Regolith• Atmospheric gas• Dust• Depth-resolved suite• Other samples of opportunity
2-4 The Unique Value of Returned Samples
Because MSR would be an expensive mission, it is worth asking whether its objectives could alternatively be achieved either by in situ investigations or by study of the martian meteorites.
In 2006, MEPAG identifi ed 55 important future science investigations related to the exploration of Mars. Carrying out these investigations would all be dependent on our ability to make measurements, and a wide range of spacecraft types and targets is implied. The ND-SAG (2008) concluded that about half of the MEPAG investigations could be addressed to one degree or another by MSR. In fact, MSR is the single mission that would make the most progress towards the entire list. Moreover, given the scope of what is realistically achievable via in situ exploration technology, a signifi cant fraction of these investiga-tions cannot be meaningfully advanced without returned samples. There are four primary reasons why MSR is of such high value to science:

9
Sci
ence
Ob
ject
ives
• Complex sample preparation. Several of the high-priority investigations would involve sample preparation procedures that would be too complicated for in situ missions. For example, many of the methods of geochronology (see Objective #4 above), require high-purity mineral separations followed by extraction and concentration of trace elements such as Rb, Sr, Nd, and Sm under clean condi-tions. The procedures to do this in terrestrial labs are well established, but we are nowhere close to fi guring out how to do this at Mars. Other investigations would require extensive heating to high tem-peratures (>1000 C); extraction using a sequence of polar and non-polar organic solvents, followed by chemistry on the extracts to produce derivatives for organic analysis; freeze-drying, etc. Another critical example is the preparation of thin sections—this involves a degree of interactivity that is not possible with simple robotic systems.
• Instrumentation that would not be suitable for fl ight to Mars. Certain kinds of instrumentation would not be amenable for mounting on a Mars lander, because they are too large, require too much power, require too much maintenance, or have complex procedures (e.g. sample loading/manipula-tion). An example would be a Computed Tomography (CT) scanner.
• Instrument Diversity. In situ missions to date have been limited to 5–10 scientifi c instruments. However, we may be able to analyze returned samples using 50–100 instruments, including future instruments that have not yet even been designed. This could signifi cantly amplify our ability to make initial discoveries, to respond to initial discoveries with follow-up tests, and to increase the degree of defi nitiveness to which a scientifi c question could be answered (which commonly is dependent on whether a preliminary result could be confi rmed by a different kind of measurement).
• Mars meteorites are useful for some, but not all questions. It has been widely accepted for approximately two decades that the shergottite, nakhlite, and chassigny (SNC) class of meteorites is from Mars, and there are now approximately 40 known meteorites of this type. All of them are relatively fresh igneous rocks, derived from either thick basalt fl ows or subvolcanic intrusive rock. However, current high-priority scientifi c questions, particularly related to the life goal, also require the analysis of sedimentary rocks, hydrothermally altered rocks, and evolved igneous rocks, all of which are absent in the meteorite collection. Also not represented in the meteorite suite are regolith, dust, and atmospheric gas, three sample types needed to address several key objectives. Finally, the Mars meteorites are from unknown localities on Mars—we don’t know exactly what they have sampled.

10
III. High-level Requirements
CAPE VERDEA promontory nicknamed “Cape Verde” can be seen jutting out from the walls of Victoria Crater in this approximate true-color picture taken by the panoramic camera on NASA’s Mars Exploration Rover Opportunity.
10

iMARS
11
Hig
h-le
vel R
equi
rem
ents
The iMARS team has compiled a detailed set of draft high-level requirements in three categories—science, planetary pro-tection, and mission/programmatics. These are listed in their entirety in Appendix II and are summarized in Table 1 below.
TABLE 1High-level requirements summary
The science requirements include the characteristics of the samples, the requirements for characterizing the sites from which samples are to be collected, the characterization of the samples as they are collected, and protection and preserva-tion of the samples.
The planetary protection (PP) requirements originate in the treaty obligations of space-faring nations and are maintained by the Committee on Space Research (COSPAR) in the form of a planetary protection policy document. A Mars sample return mission would need to comply with planetary protection requirements more demanding than for any mission fl own to date. There are aspects of planetary protection that are unique to MSR, which may not be familiar to Mars mission planners and potential sponsors. These requirements can be summarized as follows (the defi nitions of the PP categories are presented in Appendix IV):
Category Requirement
Sample types to meet science objectives MSR would have the capability to collect samples of rock, granular materials (regolith, dust) and atmo-spheric gas
Sample mass MSR would return a minimum of 500 g of sample mass
Sampling redundancy including contingency samples at landing site
MSR would have both a rover-based sampling system and a lander-based sampling system
Sample encapsulation MSR would have the capability to encapsulate each sample in an airtight container to retain volatile components of solid samples with the associated solid samples and protect samples from commingling
Cache retrieval If Mars Science Laboratory (MSL) ends its mission in an accessible location with a cached sample on board, MSR should be designed to have the capability to recover the cache(s)
Horizontal mobility to acquire diverse samples needed to meet science objectives
In order to sample various geological sites, MSR would have the ability to rove to the edge of its landing error ellipse (“go-to” capability), carry out a 2.5 km sample acquisition traverse, then return to the lander.
Landing site latitude range MSR would be able to access landing sites within +/- 30 deg latitude
Planetary protection All MSR fl ight and ground elements would meet the planetary protection requirements established by COSPAR; an MSR mission is classifi ed as category V, restricted Earth return
International cooperation MSR mission planning would enable international cooperation
Timing The launch of Lander Composite would be no later than 2020, and MSR would return the samples within 5 years after the launch of the fi rst element

12C
hap
ter
III.
• MSR would be classifi ed as Category V, restricted Earth return. Such a mission would require the highest degree of containment of the samples and all returned hardware that had been in direct contact with Mars. The requirement is to break the chain of contact between Mars and Earth, which needs to be refl ected in both mission and spacecraft design.
• Landed assets involved in acquiring the samples to be returned must meet the requirements for Category IVb (see Appendices II and IV for details), missions performing life-detection analyses. The Category IVb requirement for sample return missions is intended to minimize the likelihood of false positive detection due to contamination of a Mars sample by Earth organisms, especially during life-detection and biohazard assessments that would be performed on the samples.
• Orbital elements of an MSR mission must meet the requirements for Category III, either via orbital lifetime or bioburden control. Additionally, any orbiter hardware that might potentially contaminate the returned samples would be required to meet cleanliness levels equivalent to the landed assets (i.e., Category IVb).
The mission/programmatic requirements aim to specify an international mission that would be technically feasible and affordable from a schedule and cost viewpoint. These would include requirements for mis-sion sequence and planning to enable international participation.

13

14
MERIDIANIThe Meridiani area has a long sedimentary history; this false-color image shows rockier areas in redder hues, and dustier ones in cool tones. This image, 260 km (161 miles) wide, was taken by the Thermal Emission Imaging System (THEMIS) on the Mars Odyssey spacecraft in 2004.
IV. Implementation of Mars Sample Return

iMARS
15
Imp
lem
enta
tion
of M
ars
Sam
ple
Ret
urn
4-1 Implementation Considerations Related to the Science System
4.1.1 Surface Mobility
Achieving the scientifi c objectives of MSR would be critically dependent on the types of sample that would be collected, which in turn would depend on the sample collection mechanism being able to reach specifi ed samples. Two separate sampling systems are envisioned: 1) a rover-based sampling system and 2) a lander-based sampling system. Having these different opportunities would ensure sampling redundancy and would decrease part of the risk to mission success (Appen-dix II, Req’t. # 3)
• MSR would have the ability to rove to the edge of its landing error ellipse (“go-to” capability), carry out a 2.5 km sample acquisition traverse, and then return to the lander. (Appendix II, Req’t. #13). Within the scope of this requirement would be the ability for the rover to visit multiple locations within a single site (for example, taking material from different positions within a single outcrop of rock, where the locations would be between 1 cm and 1 m apart, depending on the structure of the outcrop), as well as visiting different sites that might be several tens to hundreds of meters apart. The rover-based sample acquisition system would have the capability of collecting rock samples, granular materials (regolith, dust) and atmospheric sample(s) (Appendix II, Req’t. #2), as well as single cores to depths of ~5 cm below the surface (Appendix II, Req’t. #4a). Again, being able to collect different types of material would require mobility.
• The lander-based sampling system could collect samples from different vertical depths (Appendix II, Req’t #5). The lander-based system would be able to collect contingency samples shortly after landing, and would also be designed to collect samples from within the landing site including core samples from regolith or soft rock, as well as an atmospheric sample.
In addition, if NASA’s Mars Science Laboratory (MSL) ends its mission in an accessible location with a cached sample on board, MSR should be designed to have the capability to recover the cache (Appendix II, Req’t. #1). This may be a third class of sample that could be returned by MSR.
4.1.2 Selection of Samples and Documentation of Field Context
Achieving diversity in the sample collection would require enough knowledge to be able to select wisely the few samples that could be returned (Appendix II; Req’t #24). Correctly interpreting the diversity of a suite of samples typically requires that the fi eld context of the samples is known (Appendix II; Req’t #26). In order to achieve these two functions, on-Mars sample-related measurements are needed. If MSR were sent to a previously unvisited landing site, or it got “off the beaten track” of a previous mission’s operations, the value of sample data is straightforward. Even if the MSR rover were to “follow in the footsteps” of a previous rover that has already established the fi eld context, sample-related data would be useful, although the number of measurements could perhaps be reduced.

16C
hap
ter
IV.
Although there are some differences in perspective by different scientists, fi ve measurements are generally thought to add signifi cantly to the value of the sample collection (ND-SAG, 2008):
1. High-quality color panoramic imaging would be essential to identify samples of interest and to determine their local geological context (e.g., Grotzinger et al., 2005).
2. A microscopic imager (with resolution of 10s of microns or better) that examines rock and sediment textures for clues about processes and environments of formation. In addition, microbially induced textures are one of the key indicators of life (e.g., Herkenhoff et al., 2004).
3. The mineralogy would need to be determined to discriminate one rock from another and to establish geologic context of the samples (e.g., Christensen et al., 2004). For example, phyllosili-cates, sulfates, carbonates and silica-rich minerals are excellent for retaining evidence of aqueous processes and of habitable environments and life.
4. Measurements of elemental abundance have been critically important during the MER mission (e.g., Ming et al., 2006; McSween et al., 2006) and would be essential in understanding the range of variability within a fi eld site, and in identifying the effects of geologic processes.
5. Reduced carbon measurements would be essential for understanding prebiotic chemistry, habitability, and life (e.g., Schopf, 1983). Parts-per-million-level sensitivity might be suffi cient for screening for sample selection on Mars.
A rock abrasion tool would also be essential for characterizing the rocks adequately, as many rocks on Mars have dusty or weathered surfaces.
4.1.3 Sample-Acquisition System
Rock Samples In order to maximize the scientifi c value of rock samples, the rover-based sample acquisition system (Appendix II; Req’t #4) should be able to:
• Take samples from outcrops where the geologic context is well-known, and also from loose rocks of interest.
• Sample both the weathered exterior and unweathered interior.
• Sample specifi c sites (e.g., designated beds within a stratigraphic sequence, such as the Burns Cliff at Meridiani Planum).
• Deliver samples of an appropriate size and form.
These priorities would be served with a “mini-corer” capable of accessing unweathered terrains and acquiring small samples. An example geometry of about the right size is a small core of about 1 cm in diameter and 2 to 3 cm in length; how to optimize the combination of parameters is still under discussion. To distinguish this from larger drills with depth capability of 2–3 m, iMARS has adopted the generic term “mini-corer” for this tool.
Regolith/Dust SamplesThe simplest and probably most effective way to sample granular materials, such as regolith and dust, might be using a scoop. However, it might be possible to engineer a mini-corer so that it could also be used to sample granular materials.
Atmospheric Gas SampleBecause of the wide range of concentration of the various gas species in the martian atmosphere, the quantity of atmospheric gas needed for measurement would vary greatly among the different major spe-cies. The ND-SAG (2008) recommended that a minimum returned gas sample should be 10 cm3 at a pressure of 0.5 bar (Appendix II; Req’t #9). This would provide enough gas material for robust analyses. As martian atmospheric pressure is about 0.006 bar, this implies a compressed gas sample with a com-pression ratio of about 100:1. The gas sample should be isolated from the rock samples. The sampling system should, therefore, consist of a small compressor and a small vessel, preferably with a valve. The latter would make the sample much easier to deal with on Earth without being contaminated by the Earth’s atmosphere.

17
Imp
lem
enta
tion
of M
ars
Sam
ple
Ret
urn
Contingency sampleThe delivery of samples from a rover-mounted sampling system would be vulnerable to failure of the rover—it would have to complete a round trip in order to deposit samples in the return system. The risk of not having rover-acquired samples could be mitigated by adding a second, redundant sampler on the landed platform, so that even if the rover would fail, some quantity—perhaps even up to as much as fi lling the sample container—of solid sample could be collected (Appendix II; Req’t #5). It would be desirable if this platform-mounted sampler took the form of a drill, possibly with depth capabilities of 2–3 m (still under discussion).
4.1.4 Returning the Samples in a Scientifi cally Useful State
The iMARS team concluded that it would diminish the value of the overall MSR mission greatly if the samples could not be analyzed fully once returned to Earth. Key characteristics must be preserved in order to make sense of the results of any analysis done on the samples. Even if the samples are altered by the long trip to Earth, exposure to conditions that are very different from the surface and subsurface of Mars, and the impact of landing at Earth, it would be critical to be able to piece together the changes that might have occurred during the voyage in order to understand the samples as they were collected. To do this, each sample must be individually packaged or “encapsulated”.
Secure and appropriate packaging would be required to ensure that samples would not become mixed (Appendix II; Req’t #10), damaged, or contaminated. To prevent mixing and cross contamination of rock samples and granular materials, an implementation like a capped vial is envisioned. In addition, some of the samples would contain volatile components, and, if they escape to the next sample, there would be potential for chemical reaction that would degrade both samples. Thus, the caps on the sample vials should be airtight.
Also, for rock samples, the internal structure is critical to the scientifi c value and would be severely compromised if the sample were pulverized. One of the major themes of the 2008 MSR conference in Albuquerque, NM (USA) (Shearer, et al., 2008) was the value of rock samples with intact mineral structure. Sample handling and packaging should ensure that samples would not be pulverized or crushed during collection, encapsulation, and transport from Mars to Earth (Appendix II; Req’t #17a).
For a gas sample, having a valved vessel would be an advantage (Appendix II; Req’t #9) because this would be by far the best way to 1) maintain sample integrity when the spacecraft is opened in the Earth’s atmosphere, and 2) split the sample and introduce aliquots into the appropriate instruments.
Proper attention is required to ensure that the sample extraction (i.e. opening of all layers of sample containment) could be done in a way to preserve the sample integrity.
4.1.5 Sample-Related Contamination Concerns
MSR would need to limit contamination of the samples by at least three categories of contaminants: 1) Earth-sourced organic molecules; 2) Earth-sourced inorganic substances; and 3) live Earth-sourced organisms. Although dead Earth-sourced organisms would also be of interest and concern, if they were detected by molecular methods, they would be covered by the fi rst of these categories. Note that the contamination concerns in all three categories would apply from the time the samples are collected on Mars until they are analyzed in a laboratory on Earth, giving rise to requirements on both the fl ight and ground systems. Note that for issues of sample contamination, the concern is solely with the contami-nants that could transfer to the samples—the contaminants that do not transfer from sample contact surfaces to the samples are not relevant to this issue,
• For organic compounds, Mahaffy et al. (2004) proposed an overall limit of 40 parts per billion (ppb), with sub-limits for each of six main classes of organic molecules of interest; and MacPherson et al. (2005) recommended that this be reduced for MSR by a factor of 4, to a total of 10 ppb (Appendix II; Req’t #18).
• For inorganic contaminants, MacPherson et al. (2005) recommended that the levels be set at 0.1% of the concentration in Shergotty and Nakhla, two of the martian meteorites. This led to the calculation of Table 7 in their report, which has specifi c recommendations for about 30 elements of interest (Appendix II; Req’t #19).

18C
hap
ter
IV.
• For terrestrial biological contamination (Appendix II; Req’t #20), constraints are established based on the planetary protection category IVb for the fl ight system. The intention of the category IVb requirement is to avoid false positives in the planetary protection test protocol (see § 4.3.4). One important strategy to achieve this would be to fully characterize the bioload on the outbound spacecraft (informally called the “passenger list”). Early approaches have been applied to differing extents to NASA’s Phoenix and MSL missions. A bioload characterization is also planned for ESA’s ExoMars (Appendix II; Req’t #21).
4.1.6 Terrestrial Sample Analysis Laboratories
It is intended that the returned martian samples would be analyzed using the full power and diversity of the world’s research laboratories. As has been our experience with the lunar samples returned by Apollo, this would allow for adapting the investigation program to respond to discoveries, for making critical measurements by different methods, and for bringing new instruments to bear as they are developed in the future. Of critical importance, the returned samples would allow the usage of large instruments that cannot be miniaturized or ruggedized (a prerequisite for consideration by in situ missions) and investiga-tion methods that require complex sample preparation procedures. Because relevant instruments and professional expertise are distributed throughout the world, including in laboratory fi elds traditionally unrelated to space science, MSR could engage a very wide spectrum of the scientifi c community on an international basis.
4-2 Summary of Architecture and Mission Elements
A “mission architecture” is a set of mission elements, in sequence, that collectively describe the complete mission. In the case of MSR, there are many theoretically possible architectures. The iMARS architecture described here draws from the combined efforts and results of previous national and international designs for MSR and represents the consensus high-level approach for the implementation of this mission.
4.2.1 General Design
The iMARS reference mission architecture would include two fl ight elements, referred to for the purpose of this report as the Lander Composite and the Orbiter Composite, launched separately to Mars, which would work together to return at least a single Mars sample container back to Earth. In addition, there would be signifi cant ground elements in operations centers, at least one sample receiving facility, and at least one curation facility.
One fl ight element, the Lander Composite, would perform a direct entry and land on the surface of Mars, as did the Mars Exploration Rovers and Phoenix and as is planned for the 2009 Mars Science Laboratory mission. After entry through the martian atmosphere, the Lander platform, with both a surface rover and Mars Ascent Vehicle (MAV), would perform a soft landing on the martian surface. The rover would drive away from the Lander platform to acquire samples from the surface, including rock cores, and then re-turn to the Lander platform, which would have mechanisms to load the samples into a sample container on the MAV. The Lander platform would also have the capability to acquire samples. When collection is complete, the sample container would be launched by the MAV into low-Mars orbit for retrieval by the Orbiter Composite.
The second fl ight element, the Orbiter Composite, would detect, rendezvous with, and capture the sam-ple container in Mars orbit. The Orbiter Composite, which would include propulsion, the capture system, and Earth return capability, would jettison its main propulsion module upon return to Earth during the next Mars to Earth transfer window. At Earth, the Earth Return Vehicle (ERV) would release an Earth Entry Vehicle (EEV)—much like those employed on the NASA Stardust and Genesis sample return missions—that would contain the sample container during entry and descent through the Earth’s atmosphere and a landing on the Earth’s surface. The ERV would divert away from Earth in a non-return trajectory.
The proposed fl ight sequences of the Orbiter/Earth Return and Lander Composites are depicted in Figure 1. Both of the fl ight sequences could be launched in the same launch opportunity, or they might be launched sequentially, one or more opportunities apart. In the case where the Orbiter Composite launch follows the Lander Composite launch, another spacecraft with telecomm capability would be required at

19
Imp
lem
enta
tion
of M
ars
Sam
ple
Ret
urn
Earth
Mars Atmosphere
Mars Surface
Mars Orbit
Atlas A 551
Lander Composite
OrbiterComposite
Orbiter(Aerobraking)
Mars Rover Mars Lander
Sample Container
Expended MAV
Mars Ascent Vehicle
Mars Ascent Vehicle
Expended Propulsion Module
Orbiter CapturesSample Container
Earth Return Vehicle
Earth Entry Vehicle
Diverted ERV
Entry & DescentStage, Direct Entry
Mars Cruise Stage
Ariane 5 ECA Control & Mission Centersand Stations
Sample Receiving andCuration Facilities
O(A
ExpendPropuls
Earth Return Vehicle
Earth EntryVehicle
rted ERV
ES
e
FIGURE 1iMARS reference architecture. The fi gure shows the launch of, and interactions between, the Lander Composite and the Orbiter Composite in the iMARS two-launch MSR architecture. Mission ground seg-ment building blocks are also identifi ed. The launch vehicles and launch order are examples, pending further refi nement of the mission concept, but the functions depicted—including sample acquisition with a rover on Mars’ surface, launch of the sample container by the MAV, and capture of the sample container by the orbiter—would be the same in any scenario.
Mars to ensure data relay for the Lander, particularly for the critical landing events. Regard-less of launch order, the time from the launch of the last fl ight element to the return of the sample to Earth would be approximately three years.
The ground segment would consist of the facilities required to control and operate the fl ight elements including science decision support, as well as the SRF(s) and curation facility(ies). The SRF(s) would provide adequate containment for the fl ight hardware and samples returned from Mars to meet PP requirements (see Appendix II). The SRF primary func-tion is to protect the Earth from potentially hazardous materials or harmful effects from the samples while the necessary test protocols are conducted to determine if the samples are safe for release. The other ground elements would be the mission and control centers for both fl ight composites, as well as a set of telecommunication ground stations.
4.2.2 Summary of Primary Mission Components
In an international MSR mission, different countries, agencies, and institutions would consider contributing in different ways. The iMARS team has broken the MSR elements into the building blocks listed in Table 2. This table includes a short description of each building block and some of the challenging technologies identifi ed by iMARS as being critical for that block.

20C
hap
ter
IV.
Name Functional Description Technology Development Needed
Orbiter Composite
Launch Vehicle for Orbiter Composite Launches Orbiter Composite - None: conventional launch vehiclewould suffi ce
Orbiter - Performs data relay with the Lander and rover from Mars orbit
- Carries rendezvous and capture system and ERV with EEV - Captures sample container in Mars orbit- Releases ERV/EEV
- Autonomous rendezvous sensors, GNC, algorithms and operations
Earth Return Vehicle (ERV) - Carries and releases the EEV- Diverts to a non-Earth impact trajectory
- None
Earth Entry Vehicle (EEV) - Is carried by ERV- Re-enters Earth’s atmosphere and lands with samples
returned from Mars
- Sample thermal protection- End-to-end system: no entry done
from Mars
Propulsion Module - Provides propulsion/fuel to reach Mars and insert into orbit- Performs rendezvous maneuvers- Propels the ERV from Mars orbit.
- None
Rendezvous & Capture System - Detects and captures sample container in Mars orbit - Low-light detection- Autonomy
Sample Containment and Verifi cation - Seals sample container and verifi es fl ight containment on return trip
- Robust sealing and containment verifi cation technologies
Lander Composite
Launch Vehicle for Lander Composite - Launches Lander Composite - None: conventional launch vehicle would suffi ce
Mars Cruise Stage - Carries the Lander from launch to its entry point in the Mars atmosphere [MSL type EDL]
- None
Lander, including EDL - Carries landed systems including rover, MAV, and sample container to the surface of Mars
- Provides landing within accuracy requirements- Carries contingency sample collection and
containment system
- Sample collection and containment system, precision landing, sample transfer system
Rover - Mobile system to acquire samples [MER class rover]- Carries instruments and tools - Carries sample collection and containment system- Transfers samples to Lander
- Sample collection and containment system
- Sample transfer system
Rover Instrument Payload - Characterizes the sample site and sample targets - None
Sample Acquisition System: Rover - Includes tools to acquire samples of soil, rock, regolith, and atmosphere
- Puts samples into encapsulation system
- Coring tools- Other sample-acquisition tools
TABLE 2Proposed Primary MSR building blocks

21
Imp
lem
enta
tion
of M
ars
Sam
ple
Ret
urn
Name Functional Description Technology Development Needed
Lander Composite (continued)
Sample Acquisition System: Lander
- Carries tools to acquire, at a minimum, soil and atmosphere samples, possible subsurface sample acquisition.
- Carries sample encapsulation system- Transfers samples to Sample Container
- Sampling tools, sample transfer system - Possible 2-3 m drill
Mars Ascent Vehicle (MAV) - Carries sample container to Mars surface on Lander- Launches sample container into Mars rendezvous orbit
- Propellant and materials for long-duration storage and performance in Mars environment
- Launch from low-mass landed platform- Low-mass avionics
Sample Container - Arrives at surface of Mars empty- Is fi lled by rover and/or lander sample transfer system- Is launched by MAV
- Orbital detection- Reliable containment but low mass- Cleanliness
Ground Facilities
Ground Recovery - Monitors Earth Entry Vehicle landing- Accesses landed EEV- Transports Sample Container to SRF(s)
- Safe transportation technology
Sample Receiving Facility(ies) (SRF)
- Provides containment and contamination control for returned samples
- Contains instruments and tools for cataloguing samples and conducting PP protocols
- Sample handling in containment with strict contamination control
- Optimized PP test protocol
Curation Facility(ies) - Provides for documentation, storage, and distribution of samples once it has been determined that the samples har-bor no life or threat to human health or the environment
- May be collocated with SRF(s)
- None
Science Support - Participates in requirements development, landing site selection, sample selection during Mars surface ops, and science analysis of returned samples.
- Evaluates extended mission opportunities for landed assets on Mars’ surface after sample return
- None
Mission Ops Center—Orbiter - Performs mission operations by commanding and control-ling the Orbiter Composite
- None
Mission Ops Center—Lander/Rover
- Performs mission operations by commanding and controlling the Lander Composite, including rover operations on the surface
- None
Research Laboratories The world’s laboratory infrastructure - None, unless sample is found to be hazardous

22C
hap
ter
IV.
4-3 Analysis of the Flight System
4.3.1 Past Studies
There have been a number of past studies on MSR missions on both sides of the Atlantic Ocean, and the work of the engineering subteam greatly benefi ted from previous efforts. In 1998, NASA and the Centre National d’Etudes Spatiales (CNES) joined to initiate a sample return mission set, for launches in 2003 and 2005, with a contribution from the Agenzia Spaziale Italiana (ASI). After cancellation of the effort in 2000, NASA reviewed and improved the US mission architecture and cost estimates through several industry studies, resulting in an improved overall mission architecture with updated cost estimates. Since 2003, ESA has included MSR as a fl agship mission within its Aurora Exploration Programme and has conducted several internal and industrial assessment studies. Although based on slightly different sets of require-ments, all the above studies independently selected—from a large range of options—a similar mission architecture baseline.
The primary conclusion from these studies is that any sample return mission benefi ts from having at least two distinct mission elements in order to fi t within current and near-future technologies and launch vehicle capabilities. Mass estimates indicate that any fl ight element capable of performing the end-to-end MSR mission from a single launch would exceed the launch capabilities of the US and ESA, as well as the capability of any current entry, descent, and landing technology for Mars. One fl ight element is required to acquire the sample from the surface of Mars and launch it to Mars orbit. A second fl ight element is required to acquire the sample in Mars orbit and return it to Earth.
4.3.2 Mission Analysis
A joint mission analysis activity was carried out in order to develop a common understanding of potential MSR mission scenarios in terms of orbital mechanics, launch vehicle capabilities, and feasible launch vehicle-fl ight element combinations over the 2018–2022 timeframe. The following assumptions were considered in the analysis:
• Two heavy-launch vehicle (Ariane 5 ECA or Atlas V 551 class vehicles) launches either in the same or in consecutive Mars launch opportunities and in any order.
• One launch would carry the Orbiter/ERV and the EEV fl ight elements (“Orbiter Composite”), the other launch would include a Mars Cruise Stage and the Lander with the MAV and a sample-acquisition rover onboard (“Lander Composite”).
• Preference was for direct Earth-to-Mars transfer trajectories (type T1 and T2); Earth swing-by and type T3 transfers were also considered to increase mass performance.
• Orbiter staging with jettison of a propulsion module in Mars orbit before Earth return.
• Lander entry at Mars would be direct from the hyperbolic arrival trajectory.
• Mars target orbit for Orbiter Composite and MAV payload delivery is 500-km circular, 45-degree inclination, reached by the Orbiter via nine-month-duration aerobraking.
• Rendezvous and capture would also be in this Mars target orbit.
• Assume direct Mars-to-Earth transfer for the return leg, always assuming the use of the earliest available return window (i.e., mid-2023 or mid-2025 Earth arrivals).
• Earth Entry Vehicle re-entry would be direct from Earth hyperbolic arrival trajectory.
In terms of required delta-V, the 2018 launch opportunity represents the most desirable option. The 2020 and 2022 opportunities are almost equivalent in terms of delta-Vs, but slightly less favorable than 2018. However, the 2022 launch window allows only for a maximum of eight months on Mars’ surface, if return to Earth by mid-2025 were required.
In terms of launch mass, the Lander Composite would be the more critical element, because of the large entry mass that would be required to land the MAV and rover. Launch vehicle performance and the composite masses are launch period and trajectory dependent. However, for architecture-development

23
Imp
lem
enta
tion
of M
ars
Sam
ple
Ret
urn
purposes, the following launch mass estimates were used: 4300 kg for the Lander Com-posite and 3500–4000 kg for the Orbiter Composite. Based on these mass estimates, the joint mission analysis revealed that an Atlas V 551-class vehicle would have positive launch margin for launching either composite, allowing the use of direct transfers in all considered launch dates. However, the current Ariane 5 ECA performance is suffi cient only for the proposed Orbiter Composite. Moreover, it would require the addition of Earth swing-by transfers to enhance launch margin. This implies a launch one year earlier than the nominal direct-transfer launch window (e.g., 2019 and 2021 instead of 2020, 2022). An enhanced version of Ariane 5, if available at that time, would improve the situation.
Based on the analysis above, the following mission scenarios were discussed (see Fig. 2). For these scenarios, example launch vehicle options are discussed for illustrative purposes only to provide planning examples supported by a specifi ed class of launch vehicle (e.g., Atlas V or Ariane 5) available today.
• Launch of the Lander Composite in May 2018 by Atlas V 551 would be followed by launch of the Orbiter Composite by Ariane 5 ECA in August 2019. The Lander Composite would land before the Orbiter would be launched; therefore, this scenario would require the presence in Mars orbit of another spacecraft (ESA Mars NET or NASA Scout 2013 for example) for initial data relay and coverage during critical landing events.
• Same as 1 but with the launches in 2020 and 2021, respectively. Another spacecraft for Lander Composite initial data relay would be required
Scenario 5
Scenario 4
Scenario 2
Scenario 1
Scenario 3
Transf. w/Earth Swing By
Transf. w/Earth Swing By
Transf. w/Earth Swing By A/b IFO
A/b IFO
A/b
Transf. w/Earth Swing By
Surface Operations
A/b IFO
DT
DT
DT Surface Operations
DT A/b IFO
DT Surf.
DT Surface Operations
Surface Operations
RdV
RdV
RdV
RdV
RdV
Return
Return
Return
Return
Orbiter Launch
Orbiter Launch
Orbiter Launch
Orbiter Launch
Orbiter Launch
Lander Launch
Lander Launch
Lander Launch
Lander Launch
Lander Launch
IFOReturn
2017 2018 2019 2020 2021 2022 2023 2024 2025
FIGURE 2MSR mission scenarios and timing.Abbreviations: A/b: aerobraking; DT: Direct Transfer (no Earth swing-by); RdV: Rendezvous and Capture; IFO: In-fl ight operations.

24C
hap
ter
IV.
• Launch of the Orbiter Composite in May 2018 by Ariane 5 ECA would be followed by launch of the Lander Composite in July 2020. This scenario would not require any additional support spacecraft.
• Launch of the Orbiter Composite in June 2019 by Ariane 5 ECA would be followed by launch of the Lander Composite in September 2022. This scenario would not require any additional support spacecraft, but implies either reduced Mars surface operation time or late return to Earth (2027).
• Launch of the Orbiter Composite in June 2019 by Ariane 5 ECA would be followed by launch of the Lander Composite in July 2020. This scenario would require another spacecraft for Lander initial data relay.
4.3.3 Landing Accuracy Analysis
Current Mars landing accuracies are on the order of 100-km radius with unguided ballistic aero-entry systems and 10 km with guided aero-maneuvering such as that planned for the 2009 MSL mission. With improvements in parachute-deployment timing, but no signifi cant technology development, ~3-km ac-curacy could be reached. Improvements in accuracy to better than 3 km would require guided parachutes, lateral guided powered terminal descent, or potentially both.
Based on 3-km landing uncertainties (3-sigma), sample acquisition on Mars’ surface would be confi ned to regions near the actual landing site or would require the use of valuable surface time either to seek more scientifi cally interesting sites outside of the safe landing area or to retrieve a cache from a prior mission. Average traverse mobility rates, estimated from experiences with the Mars Exploration Rovers, might approach 100 m per martian day or “sol”, making time on surface a trade against the ability to collect a diverse suite of samples. The choice between close-in sampling and target-oriented sampling would ultimately depend on science sampling strategies and the nature of the chosen landing site.
4.3.4 Planetary Protection Implementation Related to the Flight System
Implementing the planetary protection requirements to prevent contamination of Mars and the samples to be returned by Earth organisms associated with fl ight hardware includes reduction and control of the bioburden on fl ight hardware by cleaning, sterilization and recontamination prevention. Recontamina-tion prevention would also need to cover the return phase of the mission. Flight hardware intended for a hard landing on Mars (e.g., heat shield) would be required to further reduce the encapsulated bioburden. Impact probability constraints would apply to fl ight elements (e.g., launch vehicle upper stage, cruise stage, and orbiter) throughout all mission phases, including Mars orbit insertion. If these impact probabil-ity constraints could not be met, additional bioburden control for such fl ight elements would need to be implemented. All these approaches have been applied in various forms in past and ongoing Mars missions (e.g., Viking, Pathfi nder, MER, Phoenix, MSL, ExoMars).
The numerical bioburden limits do not scale with the size of the fl ight system; thus, larger fl ight systems must take greater care to control the contamination. The size and complexity of the MSR fl ight system—as well as the need for recontamination prevention once the sample handling chain is cleaned, sterilized, and prepared for launch from Earth, through to sample acquisition on Mars, plus the requirements for sample containment before return to Earth—might require sterilization of the fully assembled fl ight system prior to launch. This is known as “terminal sterilization”. Based on current knowledge, it is recommended to address this issue in iMARS Phase II, particularly to assess the need to start technology developments of critical long-lead components and sub-systems with respect to sterilization compatibility and the necessity to keep the trade space open until the planetary protection implementation approach is confi rmed at the Preliminary Design Review (PDR).
Implementing the planetary protection requirements to prevent contamination of Earth by potentially haz-ardous martian material would require highly reliable sample containment throughout all mission phases including Earth entry and landing, transport of the returned hardware and samples to an SRF, and opera-tions carried out in the SRF until samples and returned fl ight hardware would be declared safe for release. The process for timely conduct of the planetary protection test protocol and the ability to decontaminate and sterilize the returned fl ight hardware and samples need to be in place at the SRF.
Even if a terminal system-level sterilization of the fl ight system would not be necessary to meet the plan-etary protection requirements, general bioburden and (re)contamination control would affect the material

25
Imp
lem
enta
tion
of M
ars
Sam
ple
Ret
urn
and process selection, design, model philosophy and qualifi cation program to a greater extent than a traditional one-way mission to Mars.
4-4 Analysis of the Ground Facilities
4.4.1 Sample Receiving Facility (or Facilities)
Based on planetary protection requirements, the SRF must provide adequate containment for the fl ight hardware and samples returned from Mars until they could be tested for possible biological hazards.
Facility design, construction, and operation must utilize existing experience and best practices for Bio Safe-ty Level 4 facilities, which is the most stringent containment level for biological hazards. Requirements for contamination control would add unique complexity in all phases. Considering the stringent contamination control constraints, together with the small size of samples that need to be manipulated, robotic systems may be a good choice as an integral part of the sample handling chain. Based on the functions that would need to be performed on the returned fl ight hardware and samples, a combination of full-suit laboratories, glove-box lines, and robotic manipulation would likely to be necessary. A capability to decontaminate fl ight hardware, equipment used in the high-containment zone, and the samples must be provided.
Consensus from this and previous studies is that the SRF site should be in proximity to a relevant re-search environment (e.g., other high-containment facility or research cluster of relevance). The SRF should not be geographically or intellectually isolated.
The extent to which oversight committees may be required would depend on the legal framework of the host country within which the SRF is sited. Regardless of legal obligations, it is likely that some form of Institutional Biosafety Committee would be essential, to oversee proper implementation of the planetary protection test protocols and to ensure public confi dence in the facility. Such a committee should be constituted several years in advance of the target operating date for the SRF.
4.4.2 Sample Curation Facility (or Facilities)
Proper curation of martian samples brought to Earth by spacecraft would require one or more dedicated laboratories and associated staff (Appendix II; Req’t #29). Extraterrestrial samples collected on space mis-sions are generally stored and prepared in positive pressure nitrogen glove boxes, operated in high-level clean rooms. Martian samples would likely impose new requirements involving temperature, pressure, gas composition, and extreme organic cleanliness. Signifi cant technology development would be required to meet these requirements, and the resulting laboratories might be considerably more complex than previ-ous curation facilities. The curation facilities would also need to provide physical security and to support allocation to the international research community.
In addition to recognizing the need for dedicated curation facilities, iMARS has also discussed the advan-tages in setting up more than one facility, located in different countries. If there were multiple facilities, it might be advantageous to set them up in a complementary rather than identical way. In addition, dividing the sample set might improve overall sample security (e.g. vulnerability to a single catastrophic event) and take advantage of the specifi c expertise of international partners. The locations and confi gurations of pos-sible Mars curation facilities are yet to be determined. The operations could be conducted in stand-alone buildings or within dedicated curation laboratories associated with the SRF(s). In any case, curation would represent a long-term investment, since the scientifi c need for martian research samples would extend for years or decades, long after the fl ight mission ends.

26
V. Development Timeline
BECQUEREL CRATERThe layers shown in this image formed by loose sediment accumulating within Becquerel Crater. The layers are interesting in that there are repeated cycles of thick and thin layers. These cyclic changes in layer thickness shows that some environmental conditions varied in a repeated way as each subse-quent layer was deposited. The image was taken by the HiRISE camera on MRO.
26

iMARS
27
Dev
elop
men
t Ti
mel
ine
5-1 Mission Development
One of the challenges facing an MSR mission implemented within an international framework would be coordination of the Orbiter and Lander Composite engineering, development, and operations activities. Indeed, the early phases (0, A and B) must be done in parallel to optimize the overall mission design and the interface defi nition. It is generally considered that the Lander Composite would be the more complex to design, develop and test, and the Lander and Orbiter development and test phases (C and D) would not necessarily have the same length, particularly if the two composites would not be launched in the same opportunity.
The iMARS team generated two development plans to address the synchronization issues. Each is based on the results of the mission design studies conducted by the engineering subgroup and includes coordination across the mission elements. They are distinguished by whether or not a telecomm relay asset would be in place at Mars in time for the arrival of the Lander Composite.
The fi rst option (see Fig. 3) supposes that telecomm support would not available and, therefore, the MSR Orbiter Compos-ite would have to be in place prior to the arrival of the Lander Composite. This corresponds to scenario 3 of the mission analysis (see § 4.3.2). On the other hand, in option 2 (see Fig. 4), such support would be available, and the MSR Orbiter Composite would arrive after the Lander Composite. In this example, to address the launch performance limitations of an Ariane 5 ECA (for example), an Earth gravity assist would have to be performed. Thus, the MSR Orbiter Composite would also be launched before the Lander Composite. With a more powerful launch vehicle, the launch sequence might be different. This option corresponds to scenario 5 of the mission analysis (see § 4.3.2).
In both options, the following points are important to note:
• To insure perfect coherency between the Orbiter and Lander Composites, a mission-level PDR and an Interface PDR are planned, in addition to the normal PDRs for the Orbiter and Lander,
• There is a need to initiate technology maturation activities as soon as possible to reach the relevant Technology Readiness Levels (TRLs) at the start of Phase A and at PDR for all MSR elements including the SRF(s),
• The activities related to the SRF(s) would need to be started well in advance of the sample return, since they would have to deal with public engagement and facility approval processes, as well as with technical aspects. The site selection of the SRF(s) is identifi ed as a critical early step.
5-2 SRF Development Plan
The timelines shown in Figures 3 and 4 illustrate that the development of the SRF(s) would be eight years from the start of site-specifi c design to the completion of the building commissioning and another three years for move-in and a test phase before it would be ready to receive the samples from Mars. Although recent experience with the construction and commis-sioning of BSL-4 laboratories shows that if things go well, commissioning could be achieved in less than 8 years, we need to allow for the possibility of schedule challenges. There are two additional long-lead aspects of the SRF development that would need to be planned in advance of this eight-year development schedule.

28C
hap
ter
V.
• Site selection. The process of selecting the site(s) of the SRF(s) would need to be completed. This would require both compliance with the regulatory environment of the country (or countries) where the SRF is located and proactive communication with the local citizens. If the site is to be selected by a proposal process involving com-munities who want the facility(ies), it would take time to generate and evaluate those proposals. All told, this site selection process could take at least two years.
• Technology Development. Technical research and development efforts relating to the containment system would need to be completed before the start of detailed facili-ty design. Additional technology would also be needed in the areas of sample handling and technical solutions to allow stringent contamination control in a high-containment environment, protecting both the terrestrial environment and the samples.
5-3 Technology Maturation Plan
Even if the desire to minimize technical risk places high priority on the use of existing or partially developed technologies, some new developments are unavoidable for MSR. These critical new technologies have been carefully mapped. Their development would require signifi cant effort in the short/medium terms to reach suffi cient maturity (TRL of 6; see Appendix III for defi nitions) by the time of the PDR for the overall mission and/or for the MSR elements they enable.
• Precision Landing capability to land near scientifi c targets of interest;
• Hazard Avoidance to avoid obstacles that could endanger the lander’s platform;
• Forward Planetary Protection to satisfy the fl ight system bioburden constraints as well as to assure that martian samples would not be contaminated with Earth-sourced organisms;
L-12
Phase 0
Phase 0 Phases A/B Phase C/D EMT Surface Ops
Orbiter Technology Maturation
Lander Technology Maturation
Orbiter PDR Orbiter Launch
Lander PDR
SRF Site Confirmation Ground Breaking Building Certification
Lander Launch
SRF Technology Maturation
Mission PRR/MCRMajor Project Milestones
Curation Facility(ies)
Lander
Orbiter
Year, with respect to Lander launch
Reference Timeline (CY), assuming Lander launch in 2020
Sample Receiving Facility(ies)
IMSI
Mission SRR I/F PDR Mission PDR Orbiter Launch Lander Launch Mars Departure Earth Landing
Site development—Design Construction Commissioning Tests Ops
OpsTestsOutfittingConstructionDesign
Site Sel.
Phases A/B Phase C/D EMT Mars Orbit MET
L-11 L-10 L-9 L-8 L-7 L-6 L-5 L-4 L-3 L-2 L-1 L-0 L+1 L+2 L+3 L+4
2008 2009 2010 2011 2012 2013 2014 2015 2016 2017 2018 2019 2020 2021 2022 2023 2024
FIGURE 3Development plan assuming there is NOT telecomm support from another mission. Abbreviations: CY: Calendar Year, EMT : Earth/Mars Transfer, MarsSurf: Mars surface operations, MET: Mars/Earth Transfer, SRF: Sample Receiving Facility, IMSI : International MSR Science Institute, PDR: Prelimi-nary Design Review, PRR: Preliminary Requirements Review, MCR: Mission Concept Review, SRR: System Require-ments Review, I/F: Interface

29
Dev
elop
men
t Ti
mel
ine
• Sample Acquisition, Handling, Encapsulation, and Transfer to obtain cores and other samples, encapsulate them to avoid cross contamination, and transfer them to a sample container located on the MAV using a midsize mobility system (i.e., MER/ExoMars class rover vehicles);
• Faster Mobility to increase the speed of the rover for traversing between the lander and the science targets in order to reduce the required time for surface operations;
• Mars Ascent Vehicle to launch the sample container to the Mars rendezvous orbit;
• Autonomous Rendezvous and Capture to ensure successful detection, approach and terminal capture of the sample container in Mars orbit;
• High-Speed Earth Re-Entry to comply with the extreme heat loads during the atmospheric phase and protect the samples through the high stresses encountered upon landing;
• Back Planetary Protection (Bio-Containment) break the chain of contact with Mars and assure that there is a very low probability of contaminating Earth’s biosphere with martian particles;
• Sample Receiving Facility technologies to safely handle martian samples (contain-ment and contamination) and to perform the planetary protection test protocol.
In particular, the technology maturation program would have to develop engineering units of specifi c key elements such as the MAV, EEV, and rendezvous and capture system in time to test them in relevant environments. Also, a major mobility/sampling testbed would have to be developed to validate capabilities to perform traverses to sampling sites, end-to-end sample acquisition, sample transfer, and encapsulation for
L-12
Phase 0
Orbiter Technology Maturation
Orbiter PDR Orbiter Launch
Major Project Milestones
Curation Facility(ies)
Lander
Orbiter
Sample Receiving Facility(ies)
Phases A/B Phase C/D EMT Mars Orbit MET
L-11 L-10 L-9 L-8 L-7 L-6 L-5 L-4 L-3 L-2 L-1 L-0 L+1 L+2 L+3 L+4
2008 2009 2010 2011 2012 2013 2014 2015 2016 2017 2018 2019 2020 2021 2022 2023 2024
Phase 0 Phases A/B Phase C/D EMT Surface Ops
Lander Technology Maturation
Lander PDR
SRF Site Confirmation Ground Breaking Building Certification
Lander Launch
SRF Technology Maturation
Mission PRR/MCR
IMSI
Mission SRR I/F PDR Mission PDR Orbiter Launch Lander Launch Mars Departure Earth Landing
Site development—Design Construction Commissioning Tests Ops
OpsTestsOutfittingConstructionDesign
Site Sel.
Year, with respect to Lander launch
Reference Timeline (CY), assuming Lander launch in 2020
FIGURE 4Development plan assuming there is IN PLACE telecomm support from another mission. Abbreviations as in Figure 3.

30C
hap
ter
V.
a variety of sample types. Figure 5 below shows a schedule to mature these technolo-gies. This corresponds to the mission development plan that assumes the existence of a telecomm orbiter from another mission (See Fig. 3); in the case of no existing telecomm orbiter, the Orbiter technology development schedule would need to be advanced by six months. It is important to note that, since many of the capabilities and technologies would either be new and/or would be required to address particularly challenging requirements in the frame of MSR, signifi cant effort in terms of hardware development and testing would be required prior to the selection of the best technological concept in each area.
Orbiter
Rendezvous and Sample Capture
Back Planetary Protection
Earth Entry Vehicle
Lander
Forward Planetary Protection
Sample Acquisition, Transfer, & Encapsulation
Faster Mobility System
Precision Landing
Hazard Avoidance
Mars Ascent Vehicle
SRF
SRF Technology
Perform Trades TRL 4
Concept Selection Simulation Test and Validation
Orbiter PDR
TRL 4
Thermal Protection System Tests TRL 6 Sub-assembly EDU Flight Test
TRL 6
Algorithms Developed FPGA Implementation
Simulation EDL Design
Concept Selection Preliminary Design Tests in Real-Time Testbed
Technology at TRL 6
Double-walled Containment Robotics Test/Integration
SRF Construction Start
MAV Critical Design Review
Field Test
Corer Technology TRL 6 Rover Based Coring Demonstration
TRL 6
Lander PDR
CY 2015 CY 2016CY 2014CY 2013CY 2012CY 2011CY 2010CY 2009CY 2008
Ld -5 Ld -4Ld -6Ld -7Ld -8Ld -9Ld -10Ld -11Ld -12
SRF Technology
Orbiter Technology
Lander Technology
FIGURE 5Mars Sample Return Technology Development Schedule shows major milestones that must be achieved by the PDRs of the Orbiter, Lander, and SRF, depicted by red triangles. This fi gure indicates that a 5–6 year lead time would be required to develop the critical technologies before the start of mission development.

31

32
VI. Management Planning
TERBY CRATERThe High Resolution Stereo Camera (HRSC) on board ESA’s Mars Express orbiter imaged the Terby crater on Mars. The region is of great scientifi c interest as sediments there hold information on the role of water in the history of the planet.
32

iMARS
33
Man
agem
ent
Pla
nnin
g
The management of such an ambitious and highly international project would present signifi cant challenges in scientifi c, engineering, and political aspects. These challenges would need to be addressed among the stakeholders involved in the project.
6-1 Management of Project Elements
The magnitude of the challenges in term of management, decision-making, regulatory, and organizational issues would be greatly dependent upon how many international partners choose to be involved in MSR, the scope of their commitments, and the complexity of the interfaces between their various contributions. For example, there would be a need for overarch-ing mission-level reviews (see § 5), carried out by internationally confi gured review panels. The iMARS team has not had a chance to discuss these issues and possible solutions, since this international sharing is currently open. These topics will be addressed in the proposed iMARS Phase II.
The iMARS team did discuss the possible management of one or more Sample Receiving Facilities. The team concluded that, for an international sample return mission, all of the SRF management positions within an SRF, except the Biosafety Offi cer, could be fi lled by personnel from any country. The Biosafety Offi cer should be a resident the country in which the SRF is sited or, at a minimum, have comprehensive knowledge of local biosafety codes and control authorities.
6-2 Management of MSR Science
6.2.1 Managing an International Science Team
A signifi cant challenge for an international MSR mission would be the process by which a large, diverse, international sci-ence team would be managed. For example, how would international participation in the following critical science-related decisions be managed?
• Where to land• Which samples to collect• Mars surface operations strategy • How the samples would be subdivided once back on Earth • How the samples would be allocated for scientifi c research
One possibility considered by iMARS is the formation of an International MSR Science Institute (IMSI). This is envisioned to be a virtual institute, a confederation of Mars science agencies or countries that are substantially involved in MSR, from missions to sample analysis to curation. The purpose would be to establish a close, productive interaction among its members, analogous to what exists in a classical, collocated institute, even though the members would be geographically separated. The benefi t would be the coordination of joint international missions and the maximization of scientifi c return from, what would then be, the most precious samples on Earth. The advantages for members would be direct involvement and access to the missions, laboratories, and samples themselves.

34C
hap
ter
VI.
6.2.2 Managing the Asset (the samples)
The general process by which the samples would be tracked, protected, and made available to the inter-national research community is referred to as sample curation. This must be planned on an international basis. Sample curation can be divided into distinct, but interconnected, functions:
Documentation and trackingAll primary samples and subsequently produced subsamples would be documented and tracked.
Handling and subdivisionSamples would be subdivided as necessary to permit initial examination and to prepare subsamples for life / biohazard assessment and subsequent detailed research. All handling and subdivision would be conducted under extremely clean conditions.
Contamination and environmental controlTo the extent possible, samples would be maintained under conditions that would not alter the samples in any way. Inorganic, organic, and biological contamination of the samples would be minimized.
Secure storageSamples would be stored under a high level of physical security in order to prevent theft or damage.
Allocation for detailed researchFollowing release from the SRF(s), the samples would be transferred to one or more Mars curation facilities for long-term storage and allocation to the international research community.
6-3 Cost Estimation for MSR
The current consensus for the end-to-end MSR mission costs range from $4.5B to $8B or B€3 to B€5.3, depending on the fi nal requirements and international cooperative structure. These rough-order-of-mag-nitude costs are based upon past MSR studies, as well as actual cost data from recent Mars missions, including the Mars Exploration Rovers, MSL, and ExoMars.
Current estimates are of necessity high level and would be refi ned continuously in the future, based on fur-ther requirements defi nition, results of technology investments, and the sharing of responsibilities between the partners. One of the more important activities in Phase II of iMARS will be to support the development of a reliable estimate of the end-to-end costs and funding requirements for an international MSR.
However, nations, agencies, and institutions that intend to participate in MSR can start now to gauge the required near-term investment based on the long-lead technologies as described in section 5.3 and associated with building blocks summarized in section 3.2. The requirement to have these technologies proven in a relevant environment prior to the applicable PDR dates necessitates early investment and invites parallel development.

35

36
VII. Public Outreach and Education
COLUMBIA HILLSPortion of approximate true-color panorama taken by NASA’s Spirit rover after it successfully trekked to the top of “Husband Hill,” in the “Columbia Hills” of Gusev Crater.
36

iMARS
37
Pub
lic O
utre
ach
and
Ed
ucat
ion
During Phase I of iMARS, there was very little opportunity to promote an MSR mission to the general public or to produce any educational materials. The iMARS team did, however, recognize that public outreach and education would be essential components of any future mission and have highlighted this issue as an important part of the work of the IMSI.
Several planning aspects for a possible MSR mission were discussed by iMARS with peer groups at international confer-ences. Papers were given at the Astrobiology Science Conference in California and at the European Geosciences Union Meeting in Vienna, both in April 2008. Presentations will also be made at the COSPAR Congress in Montreal in July 2008, the International Astronautical Federation Congress in Glasgow in September 2008, and the Geological Society of America General Assembly in Houston in October 2008. Abstracts for these presentations are attached in Appendix V.

38
VIII. Conclusions and Next Steps
SEDIMENT PATTERNThe uniform pattern seen here—similar layersrepeated over a hundred times—suggest that thedeposition of the layers was interrupted at regularintervals. Patterns like this, when found on Earthusually indicate the presence of sediment depositedin dynamic, energetic, underwater environments.This image from Candor Chasma was taken by MarsGlobal Surveyor in 2000.
38

iMARS
39
Con
clus
ions
and
Nex
t S
tep
s
8-1 Conclusions
As a result of its Phase I work, iMARS has reached the following conclusions:
• The fi rst MSR mission would make an enormous contribution to many of our fundamental scientifi c questions. How-ever, the ultimate scientifi c return of the mission would be dependent on the character, diversity, and quality of the samples returned. There are important trade-off discussions between implementation/cost and benefi t in this area that still need refi nement.
• Even if a large set of existing or under-development technologies could be reused or adapted, a limited number of critical technologies need new development, including the MAV, automatic rendezvous and capture in Mars orbit, biosealing, hazard avoidance, and Earth Entry Vehicle system design and test. They would require a substantial effort in the short/medium terms to reach a correct maturity level in the early phases of the project.
• Planetary protection challenges for an MSR mission would be beyond those encountered for one-way Mars missions, particularly as related to the containment of martian samples from the point of entry into the Earth’s environment until the potential for biological hazards could be defi nitively assessed. There would be some signifi cant technological planetary protection challenges, including aseptic sample transfer, redundant containment of the fl ight system, and biohazard assessment after the samples return to Earth.
• The implementation of PP and contamination control requirements to the end-to-end mission system is identifi ed as critical and is not fully analyzed today,
• Two launch vehicles would be required to separately launch the lander/MAV composite and the orbiter/return vehicle composite. Mars aerocapture would not be required for either composite; the needed entry, descent and landing sys-tem could be based on a slightly enhanced MSL system; the horizontal mobility specifi cation could be satisfi ed with an enhanced MER class sampling rover; and the lander-based sampling system could be based on the one planned for ExoMars.
• MSR could be divided into approximately 20 separate elements that could be considered for funding by different international entities. However, a clear challenge for an international MSR would be the management of the interfaces between these different elements. Determining “who does what” would be partly a technical and partly a political question, and this would not be something iMARS could do on its own.
• If the resources are available and decision making at international level is effi cient, the mission could be started in ~2013 (phase B start) for launches around 2020 and receiving a sample back on Earth three years later (see § 5.1).
8-2 iMARS Phase II—Forward Planning
Although iMARS was able to summarize some of the high-level issues associated with developing a potential plan for an international MSR, progress is needed in several technical and management areas before entering into a structured Phase 0. Additional analysis would be helpful in the partnership-forming phase. Thus, an extension of the work of the iMARS group is recommended—this is referred to as iMARS Phase II.
40C
hap
ter
VIII
I.
8.2.1 General Objectives
There are six primary areas associated with generating the necessary support for an international MSR in which iMARS could make a signifi cant contribution if the committee were to continue its work for at least another year:
• The current fundamental basis such as the high-level requirements and the reference architecture must be consolidated, particularly to take into account the international aspects of this mission and assess the PP and contamination control implementation.
• Continue to refi ne the interplay between science and engineering. We need to understand thetrade-offs between feasibility, cost, and value in order to fi nd ways to optimize the fl ight and on-Mars systems given the multiple programmatic and technical constraints. As part of this, there is consensus building still to be done within the science community—their strong advocacy is absolutely essential.
• Understand in more detail how to break the mission down into components that would be potentially led by different fi nancial and implementation entities and understand the issues associated with managing the interfaces between these components, along with keeping these interfaces as simple as possible while achieving correct performances.
• Improve confi dence in our cost estimates, and this would require maximizing and focusing early technology and analysis investments/efforts.
• Develop a mechanism to engage potential sponsors, to assess degree of interest, and appropriateness of technical fi t.
• Initiate public engagement. We need to get early information out about the value of the mission and our approaches to risk management.
8.2.2 iMARS Phase II Proposed Organization
For iMARS Phase II to be most productive, it clearly needs continued work from the Phase I science and engineering teams, perhaps with some expansion of membership. iMARS also needs a means of working with IMEWG on the political issues and defi ning coordinated strategies for getting the MSR messages out to the public.
Concerning the critical issues of planetary protection and sample facilities, we propose a different approach than in the iMARS Phase I, in which there was a “Facilities” subteam that evolved to also encompass “Planetary Protection.” In the area of planetary protection, it is critically important to keep the setting of policy separated from the implementation of policy. Thus, we propose the following improved structure:
• Agency Planetary Protection Offi cers would lead the development of Version 2 of the Draft Test Protocol, independent of iMARS. iMARS’ job would be to implement what is required for planetary protection compliance, not to develop the requirements.
• Form a relatively small Earth Operations Subteam within iMARS that would have, as their fi rst task, requirements defi nition in the areas of ground recovery operations, Earth surface transportation, sample receiving/testing, and curation. This team should focus on risks associated with sample handling, transfer, and preservation.
• Incorporate some of iMARS’ PP experts into the engineering subteam, to help with the design of PP-compliant solutions to the fl ight system. PP needs to be integrated into the design of the fl ight system from the very beginning.
• Have two agency Planetary Protection Offi cers participate in iMARS in ex offi cio roles and have them provide guidance to both the Engineering and Earth Operations subteams.

41
Con
clus
ions
and
Nex
t S
tep
s
8.2.3 Engineering Subteam—Forward Planning
At the end of its Phase I work, the Engineering Subteam identifi ed the following fi elds where deeper technical studies are deemed necessary in order to pave the way for an effi cient start of a project Phase 0 technical activities:
• Consolidate architectural and system aspects, according to the updated high-level mission requirements and initial ideas regarding potential sharing of responsibilities;
• review and analyze the possible PP implementation options and contamination control implementation;
• elaborate detailed sampling strategies (linked with candidate landing sites);
• refi ne engineering of the most critical building blocks and identifi ed critical technologies;
• update of the technology challenges and needed capabilities (“roadmap”, strategies, etc.); and
• specifi c open points (precursor mission(s), ITAR, organization of Phase 0).
The proposed approach, in addition to the collaborative work within the team and with the other iMARS subgroups, is to organize large audience workshops in the following areas: MAV concept and rendez-vous strategies, biosealing and EEV design, sample acquisition strategy and systems, Entry Descent and Landing (EDL) System.
8.2.4 Science Subteam—Forward Planning
Develop a draft Science Management Plan including the following topics: sample management rules and processes, “Stuck in the SRF” science planning, surface science team and management, and selection processes for various teams. In addition take up the following issues:
• IMSI defi nition—develop a proposal• Begin landing-site selection process and its execution• Refi ne open questions re: lander-based sampling system• Surface operations planning, impact on requirements• Lower priority in fi rst year: Update contamination requirements• Ground based sample measurements in laboratories
The proposed approach is to form a long-lead MSR science team and conduct 1–2 meetings, but predominantly use telecons and e-mail.
8.2.5 Earth Operations Subteam
It would be most useful at this time to have the Earth Operations Subteam focus on requirements defi ni-tion (other than the planetary protection requirements that take the form of policy). In order to make our description of the mission complete, we should include ground recovery operations at the Earth landing site and transportation from there to the SRF(s). Thus, we need requirements in four areas:
• landing site operations,• Earth surface transportation,• SRF(s), and• curation.
The proposed approach is to conduct 1–2 meetings, but predominantly use telecons and e-mail.

42C
hap
ter
Title
42C
hap
ter
Title
42

43
Cha
pte
r Ti
tle
MAWRTH VALLISMawrth Vallis has a rich mineral diversity, including clay minerals that formed by the chemical alteration of rocks by water. The CRISM instrument detects a variety of clay minerals here, which could signify different processes of formation. The high resolution of the HiRISE camera on MRO helps us to see and trace out layers, polygonal fractures, and with CRISM, examine the distribution of various minerals across the surface.
Acknowledgements, References and Appendices
43

44A
ckno
wle
dge
men
ts, R
efer
ence
s an
d A
pp
end
ices
ACKNOWLEDGEMENTS
The following people contributed to this analysis: Masanao Abe, Paul Backes, Steve Broschart, Stu Kerridge, Tom Komarek, Julien Lamamy, Falko Langenhorst, Dan Lyons, Kohtaro Matsumoto, Didier Moreau, Shin-Ichiro Nishida, Bernhard Rebele, Ralph Roncoli, Gonzalo Saavedra Criado, Andy Spry, Jeff Tooley, Michael Wilson.
REFERENCES
Beaty, D., MEPAG ND-SAG team, and IMEWG IMARS team, 2008. Preliminary Findings Related to the Use of Sample Return to Advance Our Life-Related Goals for Mars (abs.), Astrobiology, v. 8, p. 420.
Bonneville, R. and Favier, J.J., 2007. Compte rendu de l’Atelier de Prospective du CNES sur l’Exploration 15–17 October 2007. CNES-DSP, 4 p.
Borg L.E., Nyquist L.E., Taylor L.A., Wiesmann H. and Shih C.-Y. (1997) Constraints on Martian differentiation processes from Rb-Sr and Sm-Nd isotopic analyses of the basaltic shergottite QUE94201. Geochim. Cosmochim. Acta 61, 4915–4931.
Christensen, P. R., M. B. Wyatt, T. D. Glotch, A. D. Rogers, S. Anwar, R. E. Arvidson, J. L. Bandfi eld, D. L. Blaney, C. Budney, W. M. Calvin, A. Fallacaro, R. L. Fergason, N. Gorelick, T. G. Graff, V. E. Hamilton, A. G. Hayes, J. R. Johnson, A. T. Knudsen, H. Y. McSween Jr., G. L. Mehall, J. E. Moersch, R. V. Morris, M. D. Smith, S. W. Squyres, S. W. Ruff, and M. J. Wolff (2004), Mineralogy at Meridiani Planum from the Mini-TES experiment on the Opportunity Rover, Science, 306 (5702), 1733–1739.
Colangeli, L. et al., Sept. 2004, Report “Mars exploration with NASA”, ASI-MAR-RP-001 prepared in response to ASI Con-tract I/057/03/0, pp.201,202.
COSPAR (2005) COSPAR Planetary Protection Policy (20 October 2002; amended 24 March 2005). Available at: http://cosparhq.cnes.fr/Scistr/Pppolicy.htm
Des Marais D. J. and Walter M. R. 1999 Astrobiology: Exploring the Origins, Evolution, and Distribution of Life in the Universe. Annual Review of Ecology and Systematics, 30, 397–420
European Space Agency (2006), Declaration on the European Space Exploration Programme ˆ Aurora. 2006 ESA Council, Publication ESA/C(2006)10 .
Grady, M.M. and the IMARS team, 2008. Planning for an international Mars Sample Return Mission (abs.). Geophysical research Abstract, vol. 10. EGU General Assembly, #04545.
Grotzinger, J. P., Bell III, J. F. and 16 others (2005) Stratigraphy and sedimentology of a dry to wet eolian depositional system, Burns formation, Meridiani Planum, Mars. Earth Planet. Sci. Lett. 240, 11–72.
Herkenhoff, K. E., et al. (2004) Evidence from Opportunity’s microscopic imager for water on Meridiani Planum. Science 306: 1727–1730.
MacPherson, Glenn J. and the MSR Science Steering Group (2002), Groundbreaking MSR: Science requirements and cost estimates for a fi rst Mars surface sample return mission. Unpublished white paper at http://mepag.jpl.nasa.gov/reports/index.html.
MacPherson, G.J. and the Mars Sample Return Science Steering Group II (2005). The fi rst Mars surface-sample return mission: Revised science considerations in light of the 2004 MER results, Unpublished white paper, 68 p, Appendix III of Science Priorities for Mars Sample Return; posted March 2008 by the Mars Exploration Program Analysis Group (MEPAG) at http://mepag.jpl.nasa.gov/reports/ND-SAG_Appendix_IIIpost1.doc
Mahaffy, P. and 15 co-authors (2004), Report of the Organic Contamination Science Steering Group. Unpublished white paper, http://mepag.jpl.nasa.gov/reports/index.html.
McCleese D. et al. 1996 The Search for Evidence of Life on Mars. Mars Expeditions Strategy Group, NASA.

45
Ack
now
led
gem
ents
, Ref
eren
ces
and
Ap
pen
dic
es
McKay D.S., Gibson E.K. Jr., Thomas-Keptra K.L., Vali H., Romanek C.S., Clemett S.J., Chiller X.D.F., Maechling C.R. and Zare R.N. (1996) Search for past life on Mars: Possible biogenic activity in martian meteorite ALH84001. Science, 273, pp. 924–930.
McSween, H.Y. et al., Alkaline Volcanic Rocks from the Columbia Hills, Gusev Crater, Mars. October, 2006. JGR-Planets, Vol. 111, E09S91, doi:10.1029/2006JE002698.
MEPAG (2006), Mars Scientifi c Goals, Objectives, Investigations, and Priorities: 2006, J. Grant, ed., 31 p. white paper posted February, 2006 by the Mars Exploration Program Analysis Group (MEPAG) at http://mepag.jpl.nasa.gov/reports/index.html
MEPAG ND-SAG (2008). Science Priorities for Mars Sample Return, Unpublished white paper, 73 p, posted March 2008 by the Mars Exploration Program Analysis Group (MEPAG) at http://mepag.jpl.nasa.gov/reports/index.html.
Messina P. et al. 2006 The Aurora Programme Europe’s Framework for Space Exploration, ESA 11–15. www.esa.int/aurora
Ming, D. W., Mittlefehldt, D. W. and 15 others (2006) Geochemical and mineralogical indicators for aqueous processes in the Columbia Hills of Gusev Crater. J. Geophys. Res., 111, E02S12, doi:10.1029/2005JE002560.
Moura D.J.P. and the IMARS Team, 2008. The Road to an International Architecture for Mars Sample Return: The IMARS Team view. IAF congress, October 2008, reference: IAC-08-A3.1.3)
National Research Council, 2007, An Astrobiology Strategy for the exploration of Mars, National Research Council of the National Academies Press, Washington, D.C. 117pp.
Rummel, J.D.; Race, M.S.; DeVincenzi, D.L.; Schad, P.J.; Stabekis, P.D.; Viso, M.; and Acevedo, S.E. (2002). A Draft Test Protocol for Detecting Possible Biohazards in Martian Samples Returned to Earth. NASA/CP-2002-211842
Schopf, J. W. (1983) Earth’s Earliest Biosphere, its origin and evolution. Princeton University Press, Princeton, 543 pp.
Shearer, C., Beaty, D. and Agee, C. (2008) WORKSHOP REPORT GROUND TRUTH FROM MARS: SCIENCE PAYOFF FROM A SAMPLE RETURN MISSION. Unpublished workshop report, 11 p, posted June 2008 by the Curation and Analysis Planning Team for Extraterrestrial Materials (CAPTEM) at http://www.lpi.usra.edu/captem/.

46A
ckno
wle
dge
men
ts, R
efer
ence
s an
d A
pp
end
ices
APPENDIX I. Terms of Reference
International Mars Exploration Working Group (IMEWG) Charter for an International Working Group On the Return of Samples from Mars
Phase IThe overarching goal of this activity is to identify how international cooperation might enable sample return from Mars, docu-ment the existing state-of-knowledge on return of samples from Mars, develop international mission architecture options, identify technology development milestones to accomplish a multi-national mission, and determine potential collaboration opportunities within the architecture and technology options and requirements, and current Mars sample return mission schedule estimates of interested nations. The activity will also identify specifi c national interests and opportunities for cooper-ation in the planning, design, and implementation of mission-elements that contribute to sample return. The Working Group’s fi nal product(s) is expected to be a potential plan for an internationally sponsored and executed Mars sample return mission.
Phase I of this working group is limited to the following activities to develop a common international understanding and go-forward plan for follow-on sample return mission studies:
• Concisely document the rationale for the benefi ts of Mars Sample Return, in terms of
- the scientifi c objectives; and
- the role in human exploration.
• Develop and document a detailed understanding of the current state-of-knowledge for Mars sample return, including studies and reports, conceptual architectures and mission elements, general technology maturity, and national interests.
• Earth-based return/receiving facilities related to the current state-of-knowledge will be included in this research.
• Identify critical challenges and opportunities for Phase II (including technical, scientifi c, programmatic and public understanding and awareness issues).
The Sample Return Study Group (SRSG) will be an activity supporting the International Mars Exploration Working Group (IMEWG):
• The chair, appointed by IMWEG, with approximately 15 members from the international Mars community (by appointment) would constitute the SRSG;
• SRSG members will be scientists, engineers and technologists as appropriate; and
• The working group shall complete the initial study within 12 months, with an interim report to IMEWG approximately half way through the study.
Deliverables:A report and related presentation material covering the study/research topics outlined above for Phase I of the SRSG.
Future Phases:Future phases of the SRSG will be determined by the members of the IMEWG, but are anticipated to build on the Phase I initial research to eventually develop a detailed set of science priorities, mission requirements, critical technologies and development timelines, opportunities for international cooperation, and a range of technically and fi nancially feasible mission architectures.
Additional phases will be defi ned and scheduled by IMEWG as results of Phase I are received.

47
Ack
now
led
gem
ents
, Ref
eren
ces
and
Ap
pen
dic
es
Requirement Type Ref. Title Description
Science
Sample Acquisition 1 Cache retrieval If MSL ends its mission in an accessible location with a cached sample on board, MSR should be designed to have the capability to recover the cache(s)
2 Sample types MSR will have the capability to collect rock, granular materials (regolith, dust) and atmospheric sample(s)
3 Sampling redundancy MSR will have both a rover-based sampling system and a lander-based sampling system
4 Rover-based sampling system MSR will have a rover-based sample-acquisition system
4a
5 Lander-based sampling system MSR will have the capability to collect samples at the landing site
5a The lander-based system will have the capability to collect contingency samples within TBD time of landing. [Note: to be defi ned in Phase II]
5b The lander-based system will have the capability to collect core samples of TBD cm from a depth of up to TBD m in regolith or soft rock and an atmo-spheric sample [Note: to be defi ned in Phase II]
7 Rock Samples: number and volume
MSR will collect at least 20 samples of at least 3.5 cc each
8 Granular Materials: number and volume
MSR will collect at least 4 samples of at least 3.5 cc each
9 Gas Sample: number and volume
MSR will collect at 1 sample of 10 cc at a pressure of 0.5 bar
10 Sample encapsulation MSR will have the capability to encapsulate each sample in an airtight con-tainer to retain volatile components of solid samples with the associated solid samples and protect samples from commingling
10a MSR will have the capability to encapsulate atmospheric samples
11 Total sample mass MSR will return a minimum of 500 g of sample mass
13 Horizontal mobility MSR will have the ability to rove to the edge of its landing error ellipse (“go-to” capability), carry out a 2.5 km sample acquisition traverse, then return to the lander.
16 Sampling site (latitude band) MSR will be able to access landing and sampling sites within +/- 30 deg latitude
Sample preservation 17 Sample temperature (max C for duration t)
The end-to-end MSR mission will retain samples at a maximum temperature of +20C and will record sample temperature with TBD frequency up to the Earth landing [Note: to be defi ned in Phase II]
APPENDIX II. Draft requirements for a possible international MSR mission.

48A
ckno
wle
dge
men
ts, R
efer
ence
s an
d A
pp
end
ices
Requirement Type Ref. Title Description
Sample preservation(Continued)
17a Sample integrity All sample handling and transfer components including the Sample Container will be designed to prevent crushing or pulverization of collected rock samples
18 Maximum allowable contamination of samples
DRAFT: The maximum allowable contamination of samples by Earth-sourced organic contaminants prior to analysis will be <10ppb total organic carbon [Note; to be defi ned, following additional data from MSL and ExoMars]. Additional limits by classes of molecules at 25% of the levels specifi ed by Mahaffy et al. (2004, Table 2).
19 Maximum allowable contamination of samples
DRAFT: The maximum allowable contamination of samples by Earth-sourced inorganic contaminants prior to analysis will be 0.1% of the concentration in the SNC meteorites. Specifi c levels summarized in Table 7 of MacPherson et al. (2005)
20 Maximum allowable contamination of samples
DRAFT: The scientifi c requirement for maximum allowable contamination of samples by live Earth-sourced organisms prior to analysis is equivalent to that specifi ed by planetary protection [Ref #104]
21 Recognize contamination background
MSR will establish and implement procedures to recognize and characterize the contamination background.
23 Sample cross-contamination by Mars-sourced contaminants mitigation
TBD [Note: to be defi ned in Phase II]
Additional measurements
24 Sample characterization capability
DRAFT: MSR will have the capability to document the appearance, characterize the mineralogy and bulk chemistry, and identify the presence of organic carbon
26 Site characterization capability DRAFT: MSR will have the ability to characterize prospective sample-collec-tion sites to enable site selection and the ability to document physical and environmental characteristics at each sample-collection site.
29 Long-term storage The MSR ground facilities will provide storage for all samples and subsam-ples, as well as test coupons of all materials that could come in contact with the samples under TBD security, TBD environmental, and TBD cleanliness, conditions for a period of not less than TBD (proposed 30) years
Planetary Protection
Forward control 101 Total bioburden limit and impact probability limit
Total bioburden control (<5E5 bacterial spores) or lifetime requirement (<1E-2 impact probability) shall be applicable for fl ight systems (i.e. orbiter, hard impacting hardware for all mission phases).
102 Bioburden limit for landed systems (per IVb category)
The bioburden of the landed system shall be equal or less than Viking post-sterilization level, or at a level driven by the nature and sensitivity of the particular biohazard investigation, whichever are more stringent, OR the subsystems which are involved in the acquisition, delivery, and analysis of samples used for biohazard assessment shall have a bioburden at that level, and a method of preventing their recontamination and the contamination of the samples to be analyzed is in place. Recontamination prevention is ap-plicable until and including analysis in SRF(s).
APPENDIX II. (Continued)

49
Ack
now
led
gem
ents
, Ref
eren
ces
and
Ap
pen
dic
es
Requirement Type Ref. Title Description
Backward control 103 Probability for Earth contamination
Meet COSPAR requirements. The probability that a single unsterilized particle of 0.2 microns in diameter or greater shall be released into the Earth environ-ment shall be less than 1x10e-6. (TBC)
104 Break the chain of contact The mission and the spacecraft design shall provide a method to break the chain of contact between Earth and Mars. No uncontained hardware that contacted Mars, directly or indirectly, shall be returned to Earth.
Mission
Launch and Earth-to-Marstrajectory
201 Number and type of launchers MSR mission planning will allow international cooperation
202 Launch sequence MSR mission planning will allow international cooperation
Mars arrival and landing
203 Launch constraints TBD depending on the selected launch vehicle
204 Landing period MSR element landings should not occur during conjunction periods and global dust storms (probability less than 20 % of optical depth > 1) [Note: to be confi rmed in Phase II]
205 Mars arrival sequence There will be an orbiting asset with telecomm relay capability at Mars for critical event telemetry for any landed mission. This relay capability may be provided by an element of the MSR mission or another spacecraft.
206 Landing accuracy The baseline landing accuracy is ±3 km (3-km landing ellipse radius, 3 sigma)
206b Safe landing The probability of a safe landing will be TBD.
207 Surface operations period The MSR landed element will be capable of surviving and maintaining com-munications through global dust storms [Note: Number and duration TBD]
Mars Operations 209 Surface mission duration (from landing to MAV launch)
The MSR sample-acquisition elements will be capable of operating on the surface of Mars for a minimum of TBD months [Note: to be derived from traverse and sample-acquisition times]
210 Detection, rendezvous and capture duration
The MSR orbital rendezvous and capture will take no more than TBD months [Note: to be derived based on lander and orbiter launch opportunities and trajectories to/from Mars]
Earth return 211 Maximum Earth entry velocity The maximum Earth entry velocity will be < 12 km/s [Note: to be derived in Phase II based on engineering studies]
212 Return abort requirement The MSR Earth return and entry systems will meet COSPAR planetary protection requirements (see 101)
213 Earth landing location TBD. No strong requirement, but impacts transportation from the landing site to the SFR
214 Max time for EEV recovery after landing
TBD hours [Note: to be derived from thermal-control profi les and security requirements]

50A
ckno
wle
dge
men
ts, R
efer
ence
s an
d A
pp
end
ices
Requirement Type Ref. Title Description
Programmatic
Program timing 301 Launch dates TBD [Note: to be derived from funding profi les and launch opportunity characteristics] Launch of Lander Composite no later than 2020
302 Total mission time MSR will return the samples within 5 years after the launch of the fi rst element
Sharing of responsibilities
303 Mission element responsibility MSR mission planning will allow international cooperation
304 Launch vehicle(s) MSR mission planning will allow international cooperation
305 MSR mission planning will allow international cooperation
Risk mitigation 306 Sample Receiving Facility(ies) responsibility and location
MSR mission planning will allow international cooperation
309 Duplication of sample containers
TBD. [Note: To be determined based on assessment of the cost vs. benefi t of sample redundancy]
APPENDIX II. (Continued)
APPENDIX III. Defi nition of Technology Readiness Levels (TRLs)
Introduction
Technology Readiness Levels (TRLs) provide a system that supports assessment of the maturity of a particular technology and consistent comparison of maturity between different types of technologies. The European Space Agency, NASA, and the Japanese Aerospace Exploration Agency have adopted these defi nitions to facilitate collaboration on international missions.
Technology Readiness Levels Summary
TRL 1 Basic principles observed and reportedTRL 2 Technology concept and/or application formulatedTRL 3 Analytical and experimental critical function and/or characteristic proof-of-conceptTRL 4 Component and/or breadboard validation in laboratory environmentTRL 5 Component and/or breadboard validation in relevant environmentTRL 6 System/subsystem model or prototype demonstration in a relevant environment (ground or space)TRL 7 System prototype demonstration in a space environmentTRL 8 Actual system completed and “fl ight qualifi ed” through test and demonstration (ground or space)TRL 9 Actual system “fl ight proven” through successful mission operations

51
Ack
now
led
gem
ents
, Ref
eren
ces
and
Ap
pen
dic
es
APPENDIX IV. Summary of COSPAR Planetary Protection Classifi cations
COSPAR guidelines impose requirements on spacefl ight missions according to fi ve categories of target body and mission type combinations [Ref. COSPAR PLANETARY PROTECTION POLICY (20 October 2002; Amended 24 March 2005)]
Category Defi nitions
Category I includes any mission to a target body, which is not of direct interest for understanding the process of chemical evolution or the origin of life. No protection of such bodies is warranted. The requirements are for simple documentation only.
Category II missions comprise all types of missions to those target bodies where there is signifi cant interest relative to the process of chemical evolution and the origin of life, but where there is only a remote chance that contamination carried by a spacecraft could jeopardize future exploration. The requirements are for simple documentation only.
Category III missions comprise certain types of missions (mostly fl yby and orbiter) to a target body of chemical evolu-tion and/or origin of life interest or for which scientifi c opinion provides a signifi cant chance of contamination, which could jeopardize future exploration. Requirements will consist of documentation (more involved than Category II) and some implementation procedures, including trajectory biasing, the use of cleanrooms during spacecraft assembly and testing, and possibly bioburden reduction.
Category IV missions comprise certain types of missions (mostly surface missions) to a target body of chemical evolu-tion and/or origin of life interest or for which scientifi c opinion provides a signifi cant chance of contamination, which could jeopardize future exploration. Requirements imposed include rather detailed documentation (more involved than Category III), and an increased number of implementing procedures. The implementation procedures required may include trajectory biasing, the use of cleanrooms during spacecraft assembly, bioburden control and sterilization processing.
Category V missions comprise all Earth return missions. The concern for these missions is the protection of the terrestrial system, the Earth and the Moon. The Moon shall be protected from backward contamination to retain freedom from plan-etary protection requirements on Earth Moon travel.
• For solar system bodies deemed by scientifi c opinion to have no indigenous life forms, a subcategory “unrestricted Earth return” is defi ned. Missions in this subcategory have planetary protection requirements on the outbound phase only, corresponding to the category of that phase (typically Category I or II).
• For all other Category V missions, in a subcategory defi ned as “restricted Earth return,” the highest degree of concern is expressed by the absolute prohibition of destructive impact upon return, the need for containment throughout the return phase of all returned hardware which directly contacted the target body or unsterilized material from the body, and the need for containment of any unsterilized sample collected and returned to Earth. Post-mission, there is a need to conduct timely analyses of the unsterilized sample collected and returned to Earth, under strict containment, and us-ing the most sensitive techniques. If any sign of the existence of a non-terrestrial replicating entity is found, the returned sample shall remain contained unless treated by an effective sterilizing procedure. Category V concerns are refl ected in requirements that encompass those of Category IV plus a continuing monitoring of project activities, studies and research (i.e., in sterilization procedures and containment techniques).

52A
ckno
wle
dge
men
ts, R
efer
ence
s an
d A
pp
end
ices
APPENDIX V. iMARS Conference Presentations
European Geosciences Union (EGU) (Vienna, April 2008)Title: Planning for an International Mars sample Return MissionAuthors: M. Grady and the iMARS team
Abstract:The return of samples from Mars, although technologically challenging, is essential for answering critical scientifi c questions that cannot be addressed by purely in situ mission. It is only through detailed terrestrial laboratory study of carefully chosen rock, regolith, ice and atmosphere samples that information related to habitability and life (including geological context, geo-chronology, and planetary evolution) can be obtained. Furthermore, it is only through careful analysis of returned samples that most of the surface conditions relevant for human exploration can be characterized.
The importance and complexity of such a mission necessitates a multinational effort, with particular collaboration between NASA and ESA, as well as the participation of space agencies from other countries. To this end, the International Mars Exploration Working Group (IMEWG) formed an international study group to investigate the architecture of an International Mars Sample Return mission (IMARS). IMARS has been supported by a MEPAG-sponsored multi-disciplinary science team with about 30 members, known as ND-SAG. Building from the efforts of previous groups, new concepts have emerged. The new vision for MSR emphasizes the integration of sample selection and study of the considerable data base that al-ready exists since the Viking mission of 1976.
It is envisaged to return about 500 g of rock, regolith, dust, and atmosphere materials, individually packaged and separated from each other. However, it is obvious that no one landing site on Mars can satisfy all the science objectives, and the cur-rently proposed mission is best thought of as the fi rst sample return.
Astrobiology Science Conference (AbSciCon) (California, April 2008)Title: Preliminary Findings Related to the Use of Sample Return to Advance our Life-Related Goals for Mars.Authors: Beaty, D.W., ND-SAG and iMARS planning teams
Abstract:The search for evidence of life on Mars would be greatly aided by studies of certain kinds of returned samples. The MEPAG Goals Document (MEPAG, 2006) describes three life-related scientifi c objectives, each of which is further broken down into four investigations. Although each of these investigations could be advanced by the analysis of returned samples, the ap-proaches are different, and different kinds of samples are implied.
Sample types that would be of interest include sedimentary rocks that span the range of depositional and diagenetic envi-ronments, rocks that have experienced water/rock interactions under different kinds of conditions, igneous rocks, samples of the regolith and dust, samples of ice, and a gas sample. The kinds of measurements that would be done on these samples in terrestrial laboratories would include detailed characterization of the texture, mineralogy, and chemistry, and at a scale, accuracy and precision that is not possible via in situ missions.
The potential scientifi c value of returned samples would be dependent on several factors, including the size of the sam-ples, the kind and number of samples, the method by which the samples are acquired, the way they are packaged, their mechanical integrity after Earth return, their maximum temperature, and the amount of information available for sample selection and documentation of sample context at the collection site. Each of these areas should be considered as pos-sible requirements for the MSR engineering system are discussed, as the MSR-related advance technology development program is planned, and as the overall budget of the mission is estimated.
COSPAR (Montreal, July 2008)Title: Potential International Collaboration for Mars Sample ReturnAuthors: Doug McCuistion, Bruno Gardini, and the IMARS Team
Abstract:The Mars Sample Return (MSR) mission has been of interest to the world’s space agencies for more than two decades. However, the mission has a number of technical challenges that would make it diffi cult for any single space agency to achieve on its own. Fortunately, the mission can be broken down into multiple discrete components with defi nable

53
Ack
now
led
gem
ents
, Ref
eren
ces
and
Ap
pen
dic
es
interfaces, and this lends itself to the splitting up of these components on an international basis. To evaluate these options, the International Mars Exploration Working Group (IMEWG) has convened the International Mars Architecture for the Return of Samples (IMARS) task force. The IMARS team has systematically evaluated three aspects of MSR: the science, the sys-tem engineering and technology development, and the necessary ground facilities, including the sample receiving and con-tainment facility. The goal has been to produce a single, integrated plan for MSR that could be submitted for participation and funding consideration to multiple international space agencies. The IMARS team has been working since September, 2007, and delivered its Phase I analysis to the IMEWG in July, 2008. This paper describes the results of the IMARS analy-ses, outlines the scientifi c objectives and a potential international architecture for sample-return collaboration. The objectives for Phase II of IMARS will be also presented.
International Astronautical Federation (IAF) (Glasgow, September 2008)Title: The Road to an International Architecture for Mars Sample Return—The IMARS Team view (reference: IAC-08-A3.1.3)Authors: Denis Moura, Frank Jordan, Alain Pradier, Andrea Santovincenzo, Richard Mattingly, Stuart Kerridge, Michael Khan, Bruno Gardini, Doug McCuistion, Lisa May and the iMARS Team
Abstract:The Mars Sample Return (MSR) mission represents a milestone in the exploration of the solar system and, in particular, in the investigation of the planet Mars and specifi c questions regarding its potential habitability. For many years, this technically challenging mission has remained as a long-term goal of many of the world’s space -faring nations and agencies. This paper will present the recent efforts of the International Mars Architecture for the Return of Samples (IMARS) group, created under the auspices of the International Mars Exploration Working Group (IMEWG), to establish a common, international reference architecture for this landmark mission.
This paper will present an initial consensus international architecture for Mars sample return. It will outline the work per-formed in establishing and assessing, in a common framework, the major requirements of the mission and their translation into engineering challenges that must be addressed. The major trade-offs arising from the preliminary architecture consider-ation will be discussed, including their relationship to the mission’s ambitious science objectives and strict planetary protec-tion constraints.
In particular, this paper documents the initial analyses performed to identify suitable mission architectures based on the evaluation of Earth-to-Mars and return trajectories, launch vehicle performances, and mission element masses.The next steps after these fi rst cooperative efforts on the MSR mission will be outlined, along with their relationship to broader planning for Mars exploration.
Geological Society of America (GSA) (Houston, October 2008)Title: Sampling Strategy for a Possible Mars Sample Return MissionAuthors: Gian Gabriele Ori, Carlton Allen, and iMARS Team
Abstract: Mars Sample Return (MSR) would be a mission devoted to the collection of rock and regolith samples from the martian surface, and their transport back to Earth. The iMARS Working Group is developing potential plans for MSR that could be implemented on an international basis. A critical subsystem for MSR would be the sample collection hardware that would need to operate on the martian surface. The landed package is proposed to consist of a fi xed platform and a mid-range rover. In order to avoid surfi cial weathering, primary sampling would be achieved by a coring device, placed on the rover, that would be able to penetrate rocks to a depth of several cm. The selection of the sampling sites would need to be sup-ported by an array of instruments in order to provide geo-mineralogical context. These instruments would provide large- to medium-scale data about the sampling area in order to identify the main geological units, their geometries and their strati-graphic relationships. Close optical investigation would reveal the gross lithologies and fi ne-scale structures (e.g. stratifi ca-tion). Geochemical and mineralogical analysis would complement these observations. The sampling strategy would be very similar to the way in which “terrestrial” geologists map an area and sample rocks. In addition, it would be valuable to have a platform-mounted subsurface system (a drill) able to collect samples of regolith, unconsolidated sediment and rocks to a depth of a few meters.

54A
ckno
wle
dge
men
ts, R
efer
ence
s an
d A
pp
end
ices
Acronym Defi nition
A/b Aerobraking
APXS Alpha Particle X-Ray Spectrometer
ASI Agenzia Spaziale Italiana
BSL-4 Bio Safety Level 4, the highest level of containment
CNES Centre National d’Etudes Spatiales
COSPAR Committee on Space Research
CT Computed Tomography
CY Calendar Year
DT Direct Transfer
ECA Evolution Cryotechnique type A (Ariane 5 ECA)
EDL Entry, Descent and Landing System
EDU Engineering Development Unit
EEV Earth Entry Vehicle
EGU European Geosciences Union
EMT Earth-Mars Transfer
ERV Earth Return Vehicle
ESA European Space Agency
ExoMars Exobiology on Mars (ESA mission under development for a 2013 launch)
FPGA Field-Programmable Gate Array
GNC Guidance, Navigation & Control
GSA Geological Society of America
IAF International Astronautical Federation
I/F Interface
IFO In-Flight Operations
iMARS international Mars Architecture for the Return of Samples
IMEWG International Mars Exploration Working Group
IMSI International MSR Science Institute (a possible organizational structure that does not yet exist)
ITAR International Traffi c in Arms Regulations
MAV Mars Ascent Vehicle
MCR Mission Concept Review
MEPAG Mars Exploration Program Analysis Group
MER Mars Exploration Rovers (NASA mission in operation)
MET Mars-Earth Transfer
MRO Mars Reconnaissance Orbiter (NASA mission in operation)
MSL Mars Science Laboratory (NASA mission under development for a 2009 launch)
MSR Mars Sample Return
NASA National Aeronautics and Space Administration (US)
ND-SAG Next Decade Science Analysis Group
NRC National Research Council (US advisory body)
PDR Preliminary Design Review
APPENDIX VI. Acronym List and Glossary

55
Ack
now
led
gem
ents
, Ref
eren
ces
and
Ap
pen
dic
es
Acronym Defi nition
PP Planetary Protection
ppb/m parts per billion/million
PRR Preliminary Requiremetns Review
RdV Rendezvous
SNC Shergottite, nakhlite, and chassigny
SRF Sample Receiving Facility
SRR System Requirements Review
SRSG Sample Return Study Group
TBC To be confi rmed
TBD To be defi ned/derived/determined
TRL Technological Readiness Levels
