principles of biomechanical analysis pse4u mr. macmillan
TRANSCRIPT

Principles of Biomechanical AnalysisPSE4UMr. MacMillan

Review of Biomechanics The Laws of Motion
1st – Law of Inertia 2nd – Law of Acceleration 3rd – Law of Reaction

Types of Motion Linear
Movement in a particular direction Sprinter accelerating down a track
Rotational Movement about an axis What are the three axis’?
Longitudinal, anterio-posterior, horizontal Ice skater spinning or a gymnastic
somersault

Linear Motion Acceleration in a straight line Force as a vector
Force as a pull or push of a certain magnitude in a certain direction

Rotational Motion Is comparable to linear motion but the
object spins around an axis Acceleration is angular Torque is measured rather than force Moment of inertia
Resistance to rotation Larger the moment of inertia, the
larger the moment of force needed to maintain the same angular acceleration

Linear and Rotational MotionLinear Motion Rotational Motion
Displacement Angular Displacement
Velocity Angular Velocity
Acceleration Angular Acceleration
Force Moment of Force (torque)
Mass Moment of Inertia
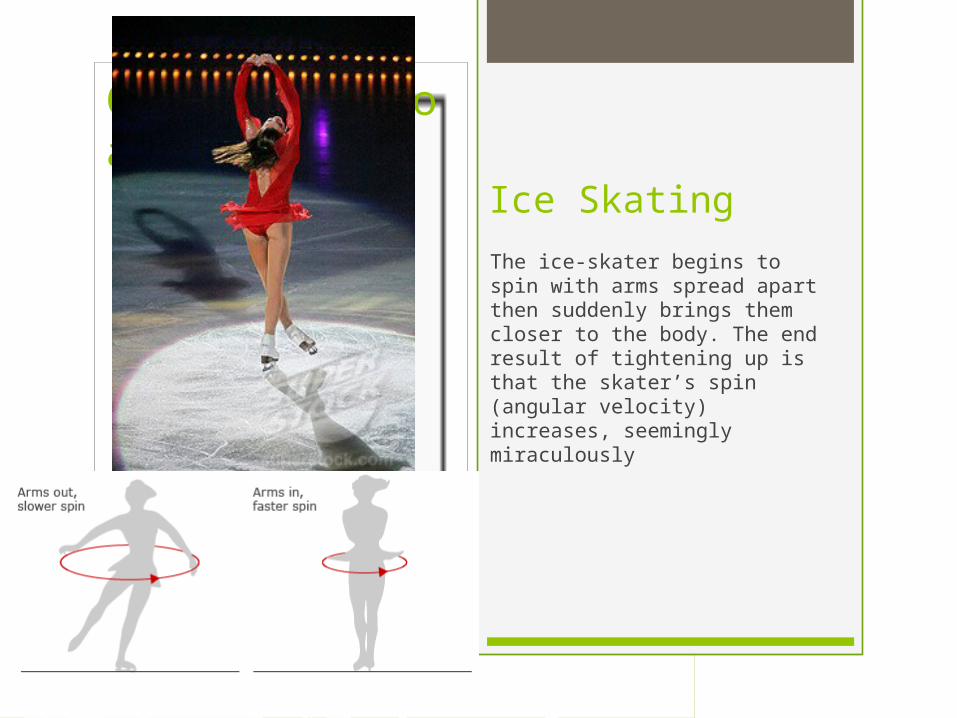
Ice Skating
Click icon to add picture
The ice-skater begins to spin with arms spread apart then suddenly brings them closer to the body. The end result of tightening up is that the skater’s spin (angular velocity) increases, seemingly miraculously

Gymnastics
Click icon to add picture
Following a series of rapid somersaults in a tight position, the gymnast does a forward flip with the body positioned more or less straight. By opening up, the gymnast increases the moment of inertia, thereby resulting in a decrease in angular velocity

Diving
Click icon to add picture
After leaving the high diving board, the diver curls tightly and then opens up just before entering the water. By opening up before entry, the diver increases the moment of inertia, thereby slowing down the angular velocity and hopefully ensuring a smooth and safe entry.

The Lever Systems Class I Lever Class II Lever Class III Lever

The fulcrum (axis) is located between the force (effort) and the resistance (load)
Class I Lever (e.g. teeter-totter)

The resistance is between the fulcrum and the resistance
Class II Lever(e.g. wheelbarrow)

The force is between the fulcrum and the resistance
Class III Lever(e.g. snow shovel)

Seven Principles of Biomechanical Analysis
1. Stability2. Maximum force3. Maximum velocity4. Impulse5. Reaction6. Torque7. Angular momentum

Principle 1: The lower the centre of
mass, the larger the base of support, the closer the centre of mass to the base of support and the greater the mass, the more stability increases.

Principle 2: The production of maximum force
requires the use of all possible joint movements that contribute to the task’s objective

Principle 3: The production of maximum velocity
requires the use of joints in order – from largest to smallest

Principle 4: The greater the applied impulse, the
greater the increase in velocity

Principle 5: Movement usually occurs in the
direction opposite that of the applied force

Principle 6: Angular motion is produced by
application of force acting at some distance from an axis, that is, by torque

Principle 7: Angular momentum is constant when an
athlete or object is free in the air.

Free Body Diagrams Free body diagrams, are a tool for solving problems with
multiple forces acting on a single body. The purpose of a free body diagram is to reduce the
complexity of situation for easy analysis. The diagram is used as a starting point to develop a mathematical model of the forces acting on an object.
Below is a picture of a flying jet.


Force = m a M = mass A = acceleration
Acceleration = (v – u) / t
V = final velocity U = starting velocity T = time
Momentum = m v M = mass V = velocity
Impulse (N/s) = Ft = m Δv
M = mass Δ v = average velocity
Change in Momentum = m (V2 – v1)
M = mass V2 = final velocity V1 = initial velocity
Biomechanical Formulae
Your Task! Read pages 230 – 234 Answer Questions on Handout on course
website