processing module for the development of an artificial retina · processing module for the...
TRANSCRIPT
UNIVERSIDADE TECNICA DE LISBOAINSTITUTO SUPERIOR TECNICO
Processing Module for theDevelopment of an Artificial
Retina
Sergio Martins, n. 48117Sergio Capela , n. 48124
LICENCIATURA EM ENGENHARIA ELECTROTECNICA E DE
COMPUTADORES
Relatorio de Trabalho Final de Curso
205/2005/M
Orientador: Professor Leonel Sousa
Junho de 2005


i
Acknowledgements
We would like to thank everyone that helped us to develop this work with special
regard to our project supervisor, Prof. Leonel Sousa and our INESC-ID colleagues Pedro
Tomas e Jose Germano for their support and guidance.
We also present our appreciations to Prof. Borges de Almeida for his precious help in
Neural Networks, and to Markus Bongard from UMH which helped us in the understand-
ing of the experimental data files.

ii

iii
Abstract
Loss of vision is a well known disability that has a profound impact on modern society.
With the rise of new technologies and the growing knowledge about the works of the
human visual system, efforts are being made to attenuate the difficulties that blind people
encounter in a society which relies heavily on visual stimuli.
The purpose of this work is the development of a processing module with the capability
of adjustment to approximate real experimental data. Therefore, it is intended to be able
to generate electric signals in response to light stimulation, to provide a suitable stimula-
tion of the visual cortex in the brain and thus giving some sense of visual rehabilitation
to profoundly blind people.
With that purpose, accurate models and algorithms for the response of the retina, due
to a visual stimulus, and for the generation of impulses capable of stimulating the visual
cortex are proposed and analyzed. The proposed models and algorithms are supervised
learning systems trained with experimental data.
Keywords
Retina Model, Spike Events, Neural Networks.

iv

v
Resumo
Perda de visao e uma bem conhecida deficiencia que tem um profundo impacto na
sociedade moderna. Com o aparecimento de novas tecnologias e com o conhecimento cres-
cente acerca do funcionamento do sistema visual humano, esforcos estao a ser empregues
de maneira a diminuir as dificuldades encontradas por pessoas cegas numa sociedade que
se baseia em grande parte nos estımulos visuais.
O objectivo deste trabalho e o desenvolvimento de um modulo de processamento capaz
de se ajustar a dados obtidos experimentalmente. Pretende-se desta maneira ganhar
a capacidade de geracao de estımulos que possam ser eficazmente aplicados ao cortex
cerebral, dando assim alguma sensacao de visao a pessoas cegas.
De maneira a atingir tal fim sao propostos e analisados possıveis modelos para a
resposta visual da retina e consequente criacao de impulsos capazes de estimular o cortex
visual. Os modelos propostos sao sistemas de aprendizagem supervisionada treinados com
dados experimentais.
Palavras Chave
Modelo da Retina, Spike Events, Redes Neuronais.

vi

Contents
1 Introduction 1
1.1 Outline of this work and main goals . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Report organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Background 5
2.1 Deterministic Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.1 Early Layers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.2 Neuromorphic Pulse Coding . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Stochastic Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3 Neural Events and Spike Sorting . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4 Neural Networks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4.1 Gradient optimization . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.4.2 Error control, adaptive steps and moment . . . . . . . . . . . . . . 14
3 Deterministic Model Neural Network 17
3.1 Model Linearization and Simplifications . . . . . . . . . . . . . . . . . . . . 17
3.2 Implementing the Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.2.1 The neural network . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.2.2 The minimum search based algorithm . . . . . . . . . . . . . . . . . 22
3.3 Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4 Stochastic Model Neural Network 29
4.1 Model Linearization and Simplifications . . . . . . . . . . . . . . . . . . . . 29
4.2 Implementing the Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2.1 The neural network . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2.2 The minimum search based algorithm . . . . . . . . . . . . . . . . . 32
4.3 Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5 Comparison and Analysis of the Models 39
5.1 Error Evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
vii

viii CONTENTS
5.1.1 Spike number errors . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.1.2 Metric errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.1.3 Mean Squared Error (MSE) . . . . . . . . . . . . . . . . . . . . . . 41
5.2 Error Analysis and Discussion . . . . . . . . . . . . . . . . . . . . . . . . . 42
6 Conclusions 45
6.1 Future work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
A Human Visual System 47
A.1 The Human Eye . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
A.2 An Overview of the Retina . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
A.3 Parallel Pathways and Color Vision . . . . . . . . . . . . . . . . . . . . . . 49
A.4 LGN and Visual Cortex . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
A.5 Key Notions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
B Filter Analysis 53
B.1 Flash Stimulus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
B.2 Impulse Stimulus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54

List of Figures
1.1 Schematic representation of the Cortical Visual Neuroprosthesis [2]. . . . . 2
2.1 Model with space-time separability [2]. . . . . . . . . . . . . . . . . . . . . 6
2.2 Complete model for simulating the human visual system [2]. . . . . . . . . 7
2.3 Integrate and fire schema for the Neuromorphic Pulse Coding [2]. . . . . . 7
2.4 Updated Integrate and fire schema for the Neuromorphic Pulse Coding [2]. 8
2.5 Stochastic model [4]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.6 Multi-electrode array. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.1 Linearized rectifier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2 Cross-correlation analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.3 Error surface of the metric in function of ρA and γ parameters. . . . . . . . 23
3.4 Deterministic model spike results for flash stimulus. . . . . . . . . . . . . . 24
3.5 Deterministic model neural network results for flash stimulus. . . . . . . . 25
3.6 Deterministic model spike results for impulse stimulus. . . . . . . . . . . . 27
3.7 Deterministic model neural network results for impulse stimulus. . . . . . . 28
4.1 Heaviside approximation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.2 Error surface of the metric. . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.3 Stochastic model spike results for flash stimulus. . . . . . . . . . . . . . . . 35
4.4 Stochastic model neural network results for flash stimulus. . . . . . . . . . 36
4.5 Stochastic model spike results for impulse stimulus. . . . . . . . . . . . . . 37
4.6 Stochastic model neural network results for impulse stimulus. . . . . . . . . 38
5.1 Percentage error for spike counts. . . . . . . . . . . . . . . . . . . . . . . . 40
5.2 Cross spike errors for the predicted trains. . . . . . . . . . . . . . . . . . . 41
5.3 Mean Square Error of the artificial neuronal network adaptation. . . . . . . 42
A.1 Schematic representation of the human eye [11]. . . . . . . . . . . . . . . . 47
A.2 Traversal section of the retina [11]. . . . . . . . . . . . . . . . . . . . . . . 48
A.3 The human visual pathways [12]. . . . . . . . . . . . . . . . . . . . . . . . 50
ix

x LIST OF FIGURES
A.4 Receptive field center-surround organization. . . . . . . . . . . . . . . . . . 52
B.1 Impulsive and frequency response. . . . . . . . . . . . . . . . . . . . . . . . 54
B.2 Impulsive and frequency response. . . . . . . . . . . . . . . . . . . . . . . . 54

List of Tables
3.1 Deterministic model, flash stimulus parameters. . . . . . . . . . . . . . . . 26
3.2 Deterministic model, impulse stimulus parameters. . . . . . . . . . . . . . 26
4.1 Stochastic model, flash stimulus parameters. . . . . . . . . . . . . . . . . . 34
4.2 Stochastic model, impulse stimulus parameters. . . . . . . . . . . . . . . . 38
5.1 Statistical properties of the errors. . . . . . . . . . . . . . . . . . . . . . . . 42
xi

xii LIST OF TABLES

Acronyms
CGC Contrast Gain Control
CORTIVIS Cortical Visual Neuroprosthesis for the Blind
DoG Difference of Gaussians
EM Expectation-Maximization
LGN Lateral Geniculate Nucleus
LMS Least Mean Square
MSE Mean Squared Error
NEV Neural Events
NN Artificial Neural Network
PCA Principal Components Analysis
UMH Miguel Hernndez University
xiii

xiv ACRONYMS

Chapter 1
Introduction
The work presented in this report was developed in the scope of the European project
Cortical Visual Neuroprosthesis for the Blind (CORTIVIS) [1]. It is finan-
cially supported by the Commission of the European Communities under the designation
QLK6-CT-2001-00279, specific RTD programme ”Quality of Life and Management of
Living Resources”.
This chapter presents the main goals and objectives of this work. It also summarizes
the work made and its main specifications. At the end of the chapter the general structure
of this report is presented.
1.1 Outline of this work and main goals
In the present, blindness is a burden because modern society is deeply raised in a world
of visual stimuli and as such, it relies heavily in the ability of sight that most people do
have. Effective treatments for profoundly blind people due to degeneration of the retina,
nerves and brain are not yet a reality and work in this area is of interest to decrease the
gap that exists between today’s world and people with this kind of limitation.
The CORTIVIS European project aims to develop prototypes in the field of visual
rehabilitations and to demonstrate the feasibility of a cortical neuroprosthesis, interfaced
with the visual cortex, as a means through which a limited but useful visual sense may
be restored to profoundly blind people. The full restoration of vision appears to be
impossible; however the capability of shape discrimination and object localization could
suffice in many of the day by day tasks, resulting in a substantial improvement in the
standard of living of blind and visually impaired persons.
This type of visual prosthesis is composed by the blocks depicted in fig. 1.1. In this
figure, it can be seen that an image capture device appears at first, in order to acquire
the visual stimulus. Attained the image it is necessary to process and encode it. These
1

2 CHAPTER 1. INTRODUCTION
tasks are made by the Visual Encoding main module, where all the necessary processing
is performed and spike events are generated to stimulate the visual cortex cells through
a microelectrode array. Having the proper stimulation it is needed to transfer it to the
cells. For that purpose a wireless link is assigned to connect the outside to the inside
of the human head. Once inside, the corresponding stimulation is applied to the cortex
through a microelectrode array.
On the context of this work, a classification of the blocks can be made regarding to the
environments, outside the human head or inside the human head, in which the modules
are comprised. Being the final result intended for this work a system that is able to learn
from experimental data (spike patterns), the modules inside the human head and the
wireless link are of minor importance.
VisualStimulus
Image capture
Visual Encoding
Serial Link
(sender)
Serial Link
(Receiver)
Electrode Stimulator
Inside Human Head
Visual Cortex Cells
Electrical stimulus for microelectrode array
Outside Human Head
Figure 1.1: Schematic representation of the Cortical Visual Neuroprosthesis [2].
This project was based on previously proposed models, from which certain parame-
ters are automatically adjustable by a Artificial Neural Network (NN). The purpose of
such system was to approximate the experimental data without compromising the overall
generalization, and by taking advantage of the knowledge of the biological systems. At
a glance this work follows a new approach of mapping the models directly in Artificial
Neural Networks.
1.2 Report organization
There are five chapters in the report, including this introduction. The second chapter,
the one that follows, presents the background needed and around which, all this work is

1.2. REPORT ORGANIZATION 3
based. There two models already studied on other papers, like [2], [3] and [4], and their
architectures are briefly presented . With such presentation, the main building blocks
of each of the models are described in a mathematical perspective. The desired output
of these models is introduced through the explanation of the recorded data files format,
NEV files, which carry information about the experimental occurrence times of neuronal
events. As a last topic, Artificial Neural Network (NN) theory is conveyed to fundament
the techniques latter used for the development of supervised learning systems.
The third and fourth chapters discuss the designed learning systems based on NN. The
chapters follow a unified structure for the different models of the background. The idea
is to ”make” the models themselves NNs. For that transformation, the various simplifica-
tions assumed in the work are introduced in both chapters, as well as the correspondent
mathematical formulation for designing and implementing the NNs. A supplementary
algorithm, named the minimum search algorithm, is proposed for dealing with the spike
generator mechanisms, which are discrete by nature and represent several problems for
the NN. Simulations results conclude the chapters.
In the fifth chapter a comparative analysis between the two different models considered
in this work is made and the corresponding advantages and drawbacks are discussed. A
experimental analysis evaluation is performed, based on real data provided by CORTIVIS
partners.
Chapter six concludes the report and points to directions for continuing this work in
the future.

4 CHAPTER 1. INTRODUCTION

Chapter 2
Background
In this chapter we introduce the foundations in which this work relies. For this purpose
two well known models are presented, and the subject of Neural Events (NEV) and Spike
Sorting are introduced. A brief biological description of the systems in which these models
are based can be found in appendix A.
Both models are briefly described in what follows. For a detailed analysis see [2], [3]
and [4] and for a comparison of the models refer to [5].
2.1 Deterministic Model
The operation of the parallel channels of the human visual system is very complex.
They process visual stimulus on four dimensions, 3-D on space and 1-D on time. Two
phases can be considered on this, according with the present model: the Early Layers,
responsible for signal processing and the Neuromorphic Pulse Coding, which translates the
output of the first block into spike events capable of exciting the visual cortex cells. These
modules are based in a collection of spatial and temporal filters and a non-linear block (the
Contrast Gain Control (CGC)) for the Early Layers and a scheme of integrate-and-fire
for the pulse coding.
2.1.1 Early Layers
The retina neural model adopted in this approach is illustrated in fig. 2.1, which
consists in a band-pass spatial filter, S(x), followed by a high-pass time filter, T (t), and
a simple rectification over the result. Assuming space-time separability:
S(x) =a+
2πσ+
e− ‖x‖2
2σ2+ − a−
2πσ−e− ‖x‖2
2σ2− . (2.1)
5

6 CHAPTER 2. BACKGROUND
DoG High-Pass
StimulusI(x,t)
Rectification
Firing RateF(t)
S(x) T (t )
Figure 2.1: Model with space-time separability [2].
This model assumes that neural response is a combination of the center and surround
receptive field, and that the sensibility of each field is described by a Gaussian distribution
(eq. 2.1). However, since the surround receptive field is generally delayed in relation to
the center receptive field, a delay block can be added, making the model represented in
figure 2.1 non space-time separable.
After filtering in space, the signal is convoluted with a temporal first order high pass
filter, represented by eq. 2.2,
T (t) = δ(t)− αH(t)e−αt, (2.2)
where H(t) represents the Heaviside step function and α−1 is the decay time constant of
the response. A linear combination of the high pass filtered signal and the non-filtered
signal may be introduced as an adjustment of the appropriate time response on a particular
receptive field as in fig. 2.2.
Another improvement in this model is the introduction of a Contrast Gain Control
mechanism. This improvement exerts a strong modulatory effect in the responses acting
as an adaptive contrast gain control mechanism. It consists in a low-pass filter with the
following impulsive response:
hLP (t) = Be−tτ , (2.3)
where B and τ represent the strength and the time constant of the CGC, followed by a
non-linear function described as:
g(x, t) =1
1 + [v(x, t).H(v(x, t)
)]4
. (2.4)
The result is finally rectified applying the function:
Fi(x, t) = φH(y(x, t) + θ)[y(x, t) + θ]. (2.5)
To extend this model to the chromatic domain, one only needs to replicate the stimulus
input over the RGB channels, and consider independent filters for the three basic color
components. Then, before the temporal high-pass filtering, a weighted combination is

2.1. DETERMINISTIC MODEL 7
performed over the three.
A final representation of the complete model is depicted in figure 2.2.
kS1(r)
kS2(r)kS1(r)
kS2(r)
Visual Stimulus
kS 1(r)
kS 2(r)
Space filtering
kSL PR 2(t ) k SLPR 1(t )kSLPG 2(t ) kSLPG 1(t )k SLPB 2(t ) kSLPB 1(t )
Delay
Delay
Delay +
+
+
+ + x
Fi(r,t)
Low PassNon LinearHigh Pass
Time filtering
Contrast G
ain Control
αT
βT
m(r,t)
l(r,t)
u(r,t)
v(r,t)
y(r,t)
g(r,t)
mB
mG
mR
sR(r,t) sG(r,t) sB(r,t)
Figure 2.2: Complete model for simulating the human visual system [2].
2.1.2 Neuromorphic Pulse Coding
A simple, but not very flexible, solution for the pulse coding is depicted in fig. 2.3. The
idea is to integrate-and-fire the signal produced by the early layers, which corresponds to
the firing rate, into a neural pulse representation.
Early Layers
Firing Rate(fR)
Action potential(Paction)
Spike Event
(E)
VisualStimulus
+
-
Neuromorphic Pulse Coding
γFeedback potential(Pfeedback)
λφ
Figure 2.3: Integrate and fire schema for the Neuromorphic Pulse Coding [2].
The equations that describe the schema in fig. 2.3 are:
Pfeedback(x, t) = γ · E(x, t), (2.6)
Paction(x, t) =
∫ t
0
[fR(x, τ)− Pfeedback(x, τ)]dτ (2.7)
E(x, t) = λ ·H(Paction(x, t)− φ) (2.8)

8 CHAPTER 2. BACKGROUND
where λ modulates the height of the pulse, φ defines the threshold for a spike to occur and
H is the Heaviside function. Some enhancements to this model have been introduced:
• a leakage factor in the integrator;
• a spike height modulation factor.
The purpose of the first one is to eliminate spikes anticipation errors because of an
action potential residuum (resulting from a remaining action potential not strong enough
to produce a spike event). Another advantage observed is the elimination of possible
random spikes originated by random noise. The spike height modulation factor will affect
the amplitude of the spike proportional to the first derivative of the action potential. Thus
a strong stimulus will generate higher spike avoiding a delay for the cells to understand
that stimulus. Rewriting the previous equations in order to include these enhancements
result in:
E(x, t) = λ · [ρc · Pstrong(x, t) + ρD] ·H(Paction(x, t)− φ) (2.9)
Pstrong(x, t) =∂
∂tPaction ·H(
∂
∂tPaction(x, t)) (2.10)
P ′A(x, t) = Paction(x, t)−
∫ t
0
ρA · P ′A + ρBdτ (2.11)
An updated representation, comprising the above equations, is shown in fig. 2.4, where
ρA and ρB are adjustable parameters of the first modification, as ρC and ρD are to the
later.
Early Layers
Firing Rate(fR)
Action potential (Paction)
Spike Event
(E)
VisualStimulus
+
-
Neuromorphic Pulse Coding
Feedback potential(Pfeedback)
γ
+ρA
ρB
-
+ +
x
ρc∂/∂t
λφ
+
ρD
Figure 2.4: Updated Integrate and fire schema for the Neuromorphic Pulse Coding [2].

2.2. STOCHASTIC MODEL 9
2.2 Stochastic Model
With this model, an attempt to resemble some random characteristics observed in
retina’s experimental responses is made. This is an important issue, mainly due to the
interpretation of the spike train elicited by certain visual stimulus. First it is known that
the presentation of identical stimulus originates different spike trains, secondly, different
light stimulus can originate similar spike responses. These observations corresponds to
the effects known in the literature as the variability and ambiguity of the neural response
[4].
To accomplish this variability, the model includes noise sources, in particular two
Gaussian noise sources. This model is only temporal, nevertheless, it could be easily
extended to include a spacial dimension, particularly if the assumption of separability is
made.
Figure 2.5: Stochastic model [4].
The first operation is a stimulus filtering through a linear filter F (t) to produce the
generator potential g(t) as depicted in fig. 2.5. The filter function F (t) is related in a
large extent with the occurrence of firing events and most of the model’s parameters
are gathered there. The filter is synthesized using a linear combination of orthonormal
functions,
F (t) =N∑
j=1
kjfj(t), (2.12)
where the use of distorted sinus functions form a basis for the construction of the filter:
fj(t) =
{sin(πj(2 t
τf− ( t
τf)2)), 0 ≤ t ≤ τf
0 , otherwise. (2.13)

10 CHAPTER 2. BACKGROUND
The use of these basis functions contrasts with the Fourier basis by the necessity of a
lower number of them to achieve an accurate filter.
Convolving the stimulus s(t) with the filter F (t) gives g(t):
g(t) =
∫ t
−∞s(τ)F (t− τ)dτ. (2.14)
The filter F (t) identifies what feature the cell reports by asking to what extent the
visual stimulus follows the filter response. As the resemblance gets higher so does g(t).
In this work fifteen different components of the type (2.13) were used to synthesize F (t)
which corresponds to N = 15 in equation (2.12).
Thereafter, g(t) gets summed with a noise component a(t) and a feedback signal p(t)
giving rise to the signal h(t). As depicted in fig. 2.5 this signal enters in a threshold
function and originates the spike events. The threshold function consists of three main
parts. The first one compares the signal h(t) with a threshold level θ, and has the
following form δ(h(t)− θ). These delta spikes should happen only when the signal crosses
the threshold θ in the upward direction and, for that purpose, the inclusion of a second
term of the form H(h(t)) is made, where H(t) is the usual Heaviside function and the dot
above h(t) designates the signal derivative with respect to time.
The inclusion of the feedback signal P (t) is due to take in account the refractoriness
of the ganglion cells after a firing event. After each firing, a negative after-potential is
triggered and added to the generator potential g(t), lowering the signal h(t) immediately
after firing. The after potential P (t) has the form:
P (t) = Be−tτp , (2.15)
where B and τp are respectively the strength and time decaying constant present in the
feedback branch.
The output signal is thus computed by applying eq. 2.16:
r(t) = δ(h(t)− θ)h(t)H(h(t)), (2.16)
where the component h(t) is included as a gain control element.
With the inclusion of this feedback loop in the equations, the following generator
potential is achieved:
h(t) = g(t) + a(t) +
∫ t
−∞r(τ)(1 + b(τ))P (t− τ)dτ. (2.17)
The output spike train appears as a series of delta functions,

2.3. NEURAL EVENTS AND SPIKE SORTING 11
ρ(t) = Σδ(t− ti). (2.18)
Equation (2.18) is termed the neural response.
Summarizing the above presentation, a linear filter F (t) sets the overall time scale of
the fluctuations in the generator potential g(t). A fraction of those transients will cross
the threshold θ determining the sparseness of firing events in the neuron’s response. As
the threshold gets crossed, in an upward direction, an after-potential immediately reduces
the input to the spike generator by an amount B. Case the potential continues to rise
by more than this amount, subsequent spikes can be fired, thus, the parameter B, along
with the threshold θ, controls the number of spikes fired in an event.
The trial-to-trial variability of event timings is simulated by the Gaussian noise source
a(t) which adds to g(t) and by the shape of the filter F (t), which sets the overall time
scale of the firing process. The spike number variability results from both σa and the
amount of noise injected by the after-potential following each spike, B · σb.
Both noise sources follow a Gaussian distribution with zero mean and a standard
deviation of σa, σb, respectively.
2.3 Neural Events and Spike Sorting
NEV stands for Neural Events which are related to the firing times of neural action
potentials. These type of events can be recorded using multi-electrode arrays.
Several experiments have been made in Miguel Hernndez University (UMH) and the
results were made available in the private pages of [1]1, with the purpose of developing
a retina model. For that intent, and particularly for the data used in this work, a real
retina was sectioned and the consequent recording of its response, to an external visual
stimulus, was made with the array. An example of such array (10x10 electrode in this
case, although there are some with 25x25) is portrayed in figure 2.6.
The output of such experiments is stored in NEV files. A large variety of information
is registered, such as, timestamps of the spike events, action potential responses for each
spike, among other technical information.
Each electrode can acquire multi-unit activity, because each one is affected by a group
of cells, not necessarily of the same type. Thus studying the response of a single one is not
possible unless some kind of pre-processing is performed first. This type of pre-processing
is called spike-sorting.
From the activity recorded it can be seen that there are several different types of action
potential. They differ in many aspects, such as the sign of the higher peak, the ratio of
1Access to the information of these pages must be requested by email or any other contact available.

12 CHAPTER 2. BACKGROUND
Figure 2.6: Multi-electrode array.
the two major peaks and the overall time scale of the curve. Assuming that each distinct
shape of responses corresponds to a kind of ganglion cell (ON-type, OFF-type, ON-OFF)
it is important to classify each response. A method that has shown good results is the
Principal Components Analysis (PCA). It consists in the extraction of several ordered
orthogonal vectors, with the direction of greater variance, which is obtained computing
the eigenvectors of the covariance matrix of the data.
Having the data represented by the first k components, we cross upon a Cluster Analy-
sis problem, which can be solved by several algorithms, such as K-Means or Expectation-
Maximization (EM) as in [6].
K-Means is probably the simplest approach to this problem. It consists in defining
the clusters locations as the mean of the data within each cluster, using for example a
Euclidean distance. This method ignores the distribution of data within clusters, which
is only relevant if the data is not well separated.
On the other hand, EM tries to capture the statistical distribution of data, model-
ing each cluster with a Gaussian centered on that cluster. The main advantage of this
algorithm is that it quantifies the certainty of classification and it deals well with long
variabilities.
In the specific case of the data supplied by UMH, an offline treatment of the spikes
recorded on each electrode was made, and the activity sorted according to their waveform
shape and assigned to neuronal ”units”. The final result alongside with two stimulus
markers, ANALOG1RISE and ANALOG2RISE as designated in the files, was enclosed
in ASCII files. The stimulus markers convey information about the stimuli used during
the experiment and thus can be used for its reconstruction. The specific mean of these
markers depends on the stimuli.

2.4. NEURAL NETWORKS 13
These ASCII files are organized according to the following format:
• Unit numbers are given as electrode identifier.unit, e.g. 40.2 means electrode 40,
unit 2.
• the stimulation is coded marked as ANALOG1RISE, ANALOG2RISE.
• the ASCII files have a multicolumn layout. In one line the columns have the following
meaning:
– first column holds the timestamp in seconds, while the second one provides the
corresponding identified unit if available; all following columns are holding the
analog waveform (in mV) of the extracellular registered signal at the timestamp
of column 1 for the identified unit of column 2,
– in case of trigger rows, the second column identifies the signal and the first
corresponds to the timestamp.
More information about these files can be found in [1].
2.4 Neural Networks
Artificial Neural Networks (NN) are supervised learning systems with biologic foun-
dations, related to the operation of the brain. They have already a comprehensible and
thorough theoretical support and development [7].
In this work, NN are used to adjust parameters of the earlier presented models, in order
to approximate experimental results, provided by UMH in the conditions already referred
in section 2.3. In classic NN, a construction unit, like the Adaline or the Rosenblatts
Perceptron, is used to construct various levels, each one containing one or more of those
units and linking the inputs to the outputs. These construction units have weights that
are adjustable through analytic techniques which are based on a error measure, usually the
Mean Squared Error (MSE), that gets minimized by applying a gradient minimization
method. There is a widely known implementing technique which goes by the name of
backpropagation and it is most useful for feed-forward networks (networks that have no
feedback, or simply, that have no connections that loop). The term is an abbreviation for
”backwards propagation of errors”. Backpropagation requires that the transfer function
used by the artificial neurons be differentiable [8].
The use of models employing neural networks was already tried with success to learn
how to reproduce neural activity recorded in NEV files [6]. However, in this work we
depart from the classic networks and, having the models in consideration, we take a

14 CHAPTER 2. BACKGROUND
different approach, namely, the models themselves were transformed in Artificial Neural
Network (NN). Despite that, all the traditional methods of NN, such as error control
and adaptive steps and the Least Mean Square (LMS) method, were used to ensure the
overall functioning of the networks. These are now introduced as background to NN.
2.4.1 Gradient optimization
The main goal of NN is to adjust the weights in a manner that a specific input leads
to a desired output (pattern). Training is based on a minimization algorithm, usually a
gradient method, which consists in iteratively adapting the weights w of the network, by
small steps with size η, towards the negative direction of the gradient of a functional J
to be minimized.
W(n + 1) = W(n)− η · ∇J(n). (2.19)
A common computation method is the back-propagation rule, which can be derived by
the application of a chain rule of differentiation.
The gradient method is exact in nature, however there is an alternative called the Least
Mean Square which gains in speed but looses in exactness. It is a gradient estimations
method. This method has a major inconvenience as it can make the convergence to a
minimum unstable.
2.4.2 Error control, adaptive steps and moment
One of the difficulties of NN is the choice of the step η. Adaptive steps tries to solve
this problem by introducing an independent and variable η for each one of the network
weights. This could introduce high steps that can be undesirable. To solve this problem,
error control is made in each iteration by reducing the steps, thus withdrawing in the
iterative process, whenever a increase of the cost function succeeds.
The implementation is made by considering an independent step ηi(n) for each weight
ωi(n). In every iteration the weights are adapted by following the rule:
ηi(n) =
{u · ηi(n− 1) , gi(n)gi(n− 1) > 0
d · ηi(n− 1) , gi(n)gi(n− 1) > 0(2.20)

2.4. NEURAL NETWORKS 15
where gi are the gradients in relation to the i’th weight and the u and d are given by,
u = 1 + δu
d = 1 + δd
(2.21)
being δu ≈ δd ¿ 1.
This method is used alongside with the moment. The moment preserving technique
is an acceleration method of the learning process of a NN. It consists in filtering the
gradient vector by using a filter with low pass characteristics.
4W(n) = −ηg(n) + α∆W(n− 1) (2.22)
The moment α introduces inertia in the gradient attenuating oscillations.

16 CHAPTER 2. BACKGROUND

Chapter 3
Deterministic Model Neural
Network
From this point forward a new approach is proposed and described, in which a depart
from the static property of parameters, present in the models previously described, is
made. This is achieved by using Artificial Neural Networks capable of tuning the overall
response of the models.
For that purpose, the models themselves are transformed in NN. The various steps
that were evolved in such a transformation are further discussed and analyzed in the
sections that follow.
3.1 Model Linearization and Simplifications
One of the difficulties in NN is that the model must be differentiable. This is not
verified in the deterministic model presented in chapter 2.1. There, it is mentioned the
presence of a rectifier, synthesized with Heaviside functions and also a integrate-and-fire
scheme for spike generation. The first being not differentiable because of the Heaviside
functions and the later being discrete, constitute problems to the operation of the models
NN.
An attempt to linearize the rectifier equation 2.5 was made, in order to resolve the
above problems. The idea was to add two functions resulting in R(t) = t + |t|, but this
version is not yet differentiable because of |t|. To overcome this problem, the absolute
value of t is replaced by t2√t2+a2 . The results follow in the form of equations,
17

18 CHAPTER 3. DETERMINISTIC MODEL NEURAL NETWORK
f(x, t) = φ ·R(u(x, t)− θ) (3.1)
R(t) =1
2·(
t +t2√
t2 + a2
)(3.2)
where f(x, t) is the output of the linearized rectifier. The constant a in R(t) is a tunable
parameter that defines the degree of approximation obtained in relation to the original
half wave rectifier.
−10 −8 −6 −4 −2 0 2−0.5
0
0.5
1
1.5
2Rectifier Approximation
x
R(x
)
Desired Rectifiera=0.1a=0.3a=0.7a=1.0
Figure 3.1: Linearized rectifier
A visual representation of the linearized rectifier is given in fig. 3.1, where the sig-
nificance of parameter a is evident. As it can be seen, as a decreases the degree of
approximation increases and in the limit, when a → 0, the two functions are identical. To
make the linearized rectifier equivalent to eq. 2.5, φ and θ were included in the following
form: φ ·R(t− θ).
For the integrate-and-fire scheme, such a simple solution will not suffice, and so, the
model is cut as in chapter 2.1. The transformation to a NN was applied only to the early
layers and for the rest of the model, a minimum search based algorithm was developed and
applied. This algorithm scans a n-dimensional space to find a minimum. It is described
in detail in the next section, where the specific search space is defined.
Another source of possible complications is the CGC, since it introduces a feedback
cycle. This feedback was not considered because it was regarded as not worth it. In fact
this feedback acts mainly as an automatic gain control mechanism which does not change
significantly the final results.

3.1. MODEL LINEARIZATION AND SIMPLIFICATIONS 19
Another critical issue which needs some attention is the existing lag between the cell
response and the model response. This happens because the model doesn’t takes in
account that the cells don’t have a immediate reaction to the stimulus. Because of this
the stimulus must be aligned with the response, in order to have an operational NN. With
that purpose, a cross-correlation analysis (see fig.3.2) on the data has to be preformed
prior to the training.
The cross-correlation analysis can not be performed directly on the experimental data
because of its discrete nature. A simple workaround is to filter the experimental spike
events with a low-pass filter, preserving the information about the time of occurrence and
the density of activity. A simple Hanning window (eq. 3.3) was chosen with this purpose.
w[k + 1] = 0.5 ·(
1− cos
(2π
k
n− 1
)), k = 0, ..., n− 1. (3.3)
where n times the sampling period gives the length of the window.
The cross-correlation was then made over the stimulus and the estimated firing rate,
originating several peaks around the origin. With that analysis, the phase lag can be
identified, from the temporal position of the first peak seen in fig.3.2, and the signals
aligned.
0 0.1 0.2 0.3 0.4 0.50
1
2
3
4
5
6
7
8
9
Time [s]
Cro
ss C
orre
latio
n A
mpl
itude
Figure 3.2: Cross-correlation analysis
This simple method did not suffice for all cases, since there were several aspects that
had influence in the lag estimation, such as, the filter used, in this case the Hanning
window length, the cell response and the stimuli characteristics. In fact, there is not an
optimal solution to the alignment problem because of all that dependencies, and so the
results must be manually verified. This manual verification may lead to small changes in
the estimated lag in order to improve results.

20 CHAPTER 3. DETERMINISTIC MODEL NEURAL NETWORK
3.2 Implementing the Model
As it was mentioned in the last section (3.1), the complete model was cut and trans-
formed in a hybrid model, with a NN for the early layer and a minimum search based
algorithm which uses the metric proposed in [9].
3.2.1 The neural network
The main task in designing the NN is the calculus of the derivatives of signals present
in the model. These signals are the convolution results throughout the model,
m(x, t) =
∫r(τx, t)S(x− τx)∂τx (3.4)
u(x, t) =
∫ t
0
m(x, τ)T (t− τ)∂τ (3.5)
where S(x) refers to equation 2.1 and T (t) to equation 2.2. r(τx, t) is the input signal.
The neural events can be taken from the experimental results, however, since the NN
is applied only to the early layers, an estimate of the instantaneous firing rate has to be
performed. This firing rate is estimated by applying a low pass filtering to the spikes with
a Hanning window, because the firing rate characteristic is what sets the spike events. As
the spike events result from an integration, convolving the events with an appropriate filter
(low pass) gives the strength of the firing rate, that gave rise to the events themselves.
The length of the window was empirically adjusted and varies according to the needs of
the training. A common value of this length was 64 ms.
The Mean Squared Error is used as a cost function. The error itself is the difference
between the output of the net and the desired signal taken as the estimate referred above.
e(t) = f(t)− d(t) (3.6)
Differentiating in order to the parameters of interest:
• In order to θ,
∂C(t)
∂θ= −2 · e(t) · φ ·R′(u(x, t)− θ) (3.7)
• In order to φ,
∂C(t)
∂φ= 2 · e(t) ·R(u(x, t)− θ) (3.8)

3.2. IMPLEMENTING THE MODEL 21
• In order to α,
∂C(t)
∂α= 2 · e(t) · φ ·R′(u(x, t)− θ) · ∂u(x, t)
∂α∂u(x, t)
∂α=
∫ t
0
m(x, τ)(α · (t− τ)− 1) · e−α(t−τ)∂τ
(3.9)
• In order to a generic variable of S(x), ε,
∂C(t)
∂ε= 2 · e(t) · φ ·R′(u(x, t)− θ) ·
∫ t
0
T (τ)∂m(x, t− τ)
∂ε∂τ
∂m(x, t)
∂ε=
∫r(τx, t)
∂S(x− τx)
∂ε∂τx
(3.10)
• Specifying for each of the parameters of S(x),
∂S(x)
∂σ+
=a
2πσ5+
(‖x‖2 − 2σ2+)e
− ‖x‖22σ2
+ (3.11)
∂S(x)
∂σ−= − b
2πσ5−(‖x‖2 − 2σ2
−)e− ‖x‖2
2σ2− (3.12)
∂S(x)
∂a+
=1
2πσ2+
e− ‖x‖2
2σ2+ (3.13)
∂S(x)
∂a−= − 1
2πσ2−e− ‖x‖2
2σ2− (3.14)
where R(t) is the linearized rectifier and R′(t) = ∂R(t)∂t
.
With all the above formulas, the gradient is calculated by applying:
~∇J =∂C
∂α~eα +
∂C
∂θ~eθ +
∂C
∂φ~eφ. (3.15)
For the training itself, and due to the length of data, there was a preference in using the
LMS training method. Each pattern was defined as a period of the stimulus, because all
the stimuli were periodic and a long time interval of inactivity succeeded each stimulation,
which in turn, makes the data breakable in independent temporal slices. Due to the LMS
oscillatory convergence, the error control mechanisms were discarded and appropriate
adaptive steps were used, respecting the following condition δu < δd (see eq. 2.21).

22 CHAPTER 3. DETERMINISTIC MODEL NEURAL NETWORK
3.2.2 The minimum search based algorithm
The estimation of the integrate-and-fire schema (fig. 2.4) was restricted to ρA and γ.
This option was taken because ρC and ρD only modulate the amplitude of the spike (and
since the experimental results does not gives any information about it, it was assumed
they all had the same size) and because ρB only adds a constant factor to the integral,
influencing the corresponding discharge rate.
In order to assess ρA and γ, some measure of adequacy is needed. For this measure a
metric based on [9] was implemented. The metric in question is very different from the
usual metrics for error measuring and was specially designed for the comparison of neural
events: the comparison is based on the relative distances between spikes present in both
trains, cross spike intervals. It is an iterative algorithm that assigns different costs to
the addition, removal and dislocation of spikes, until both trains are equal, giving then
a result for the transformation. There are two others metrics of similar algorithms but
with different notions of distance (see [9] for details): one of those is based only in spike
counts, and the error is only the difference of the number of spikes but, because of the
poor performance stated in [9] it was put aside immediately; the other one had similar
results, although a different concept was used, intervals between spike events within each
of the trains (inter spike intervals), and not cross spike intervals, are used. The cross
spike intervals metric was chosen because it makes a direct error measure between the
two spike trains in evaluation, and as such, with the absolute timing of the spikes being
important, and not only the relative time interval between two spikes in one train.
This makes the metric algorithm relevant, and so we present it here. Having two spike
trains, Sa = {a1, a2, ..., am} and Sb = {a1, a2, ..., an}, with m and n spikes respectively,
the iterations relies on the following function,
Gspikei,j = min{ Gspike
i−1,j + 1, Gspikei,j−1 + 1, Gspike
i−1,j−1 + q | ai − bj |} (3.16)
where Gspikei,j denotes the distance between a spike trains composed of the first i spikes of
Sa and the first j spikes of Sb.
The algorithm can be seen as the generator of a matrix, with i rows and j columns,
where each cell depends on the above and on the left cells. The last cell Gspiken,m represents
the desired distance. Thus, there is a bi-dimensional space (ρa and γ) and an error
measure between spike trains, from which a minimum is to be extracted.
Fig. 3.3 represents this space and denotes a valley of low error values from which a
minimum must be extracted. For achieving this minimum value an iterative approach
was used. First, some limits can be imposed to the space, in fact both have to be positive
and ρa can not be higher than 1 (100%). Having imposed those limits, a first minimum

3.3. EXPERIMENTAL RESULTS 23
0 10 20 30 0
0.1
0.2
0
20
40
60
80
LeakageFactor
Threshold
Err
or
Figure 3.3: Error surface of the metric in function of ρA and γ parameters.
is found by searching the space in a fine enough manner. Subsequent refinement is then
performed around it by finding another minimum in a subspace of the initial one. This is
repeated until, in the last of the subspaces, the error value is almost constant.
The relation between this two parameters (ρa and γ) is very flexible, as a similar firing
rate estimation can still produce reasonable results. This is due to the absence of an
absolute minimum as seen by the curved valley in fig. 3.3. Another aspect that must be
taken in account is that the metric is of great importance, hence, the cost definitions of
each of the elementary operations (addition, removal and displacement of a spike) must be
well defined. This is due to the large variations of the minimum with the elementary costs
of operations. However, these can be adjusted by varying the parameter q of eq. 3.16,
which expresses the precision of temporal coding, thus deciding the preferable operation.
For example, as q takes the value of 0.01 ms−1, the cost of removing the spike is below
the cost of displacing the spike by more than q−1 = 100 ms.
3.3 Experimental Results
After describing the implementation, it is now time to present some experimental
results. Since the main goal of this works is the generation of spike trains with some
kind of resemblance to the experimental ones, lets start by showing them side by side. In
fig. 3.4, one can see the stimulus, the experimental spikes and the predicted spikes, both
in fig. 3.4(a) and fig. 3.4(b).

24 CHAPTER 3. DETERMINISTIC MODEL NEURAL NETWORK
0 2 4 6 8 100
0.5
1
Stim
ulus
0 2 4 6 8 10
0.5
1T
arge
t
0 2 4 6 8 10
0.5
1
Out
put
0 2 4 6 8 10
Time [s]
(a) Spike trains comparison (the predicted and the pretended).
4.8 4.9 5 5.1 5.20
0.5
1
Stim
ulus
4.8 4.9 5 5.1 5.2
0.5
1
Tar
get
4.8 4.9 5 5.1 5.2
0.5
1
Out
put
4.8 4.9 5 5.1 5.2
Time [s]
(b) More detailed view of the spike response in one stimulusperiod.
Figure 3.4: Deterministic model spike results for flash stimulus.
The stimulus is homogeneous in space with a temporal square wave characteristic
with a 15% duty cycle (15% of the stimulus period is onset with a constant value and the
remaining time it is offset with a zero value). The onset stimuli corresponds to a white
flash on a black background, making it a high contrast stimulation. The homogeneous
characteristics of the used signals make the spatial filtering worthless, since it does not
have any direct influence in the results and only behaves as a gain factor. As a result
this filter was discarded and the correspondent NN weights were not trained making
m(x, t) = r(x, t) = r(t) in eq.3.4.

3.3. EXPERIMENTAL RESULTS 25
From the first figure, differences between the trains are evident, nevertheless, there is
some resemblance between them. In fact, observing the spikes from a nearer perspective,
fig. 3.4(b), it can be seen that the model is able to reproduce most of the features present,
which are related to the estimated parameters. The spike sparseness is related to the time
decay rate of the high pass filter (eq. 2.2), as it sets the strength evolution of the firing
rate of the cell. The amount of activity recorded, another important feature, is dependent
on several parameters, such as, the ones found by the minimum search algorithm (γ and
ρA) and the φ of the NN. These parameters define how much, how long and how many is
lost in the integration process that fires spikes.
The occurrence of both first spikes, in the expected and the experimental, denotes
the good alignment achieved by the correlation analysis, but some times a finer manual
tunning is necessary. Figure 3.5 depicts the intermediate result provided by the NN in
the approximation of the estimated firing rate. Given the lack of flexibility of the model,
a good overall performance was denoted by the results for this specific stimulus.
4.8 4.9 5 5.1 5.20
1
2
3
4
5
6
Time [s]
Am
plitu
de
StimulusNN OutputTarget Firing Rate
(a) Neuronal approximation results.
0 50 100 150 200 250−2
0
2
4
6
8
10
12
14
Wei
ghts
Val
ues
Epochs
(b) Weights evolution.
Figure 3.5: Deterministic model neural network results for flash stimulus.
It is worth to mention all the relevant information about the results in fig. 3.4 and
fig. 3.5, such as, the ASCII file with NEV data, the electrode and unit (see section 2.3),
and the parameters obtained. This information is contained in table 3.1, where the file is
in the first row of the table as also the electrode and unit pair used. The following two
lines of the table presents the trained parameters and the last line provide some important
parameters like the Hanning window size, the cost q, associated with the displacement
of spikes, the delay of the response and the a parameter which represents the degree of
approximation for the linearized rectifier.

26 CHAPTER 3. DETERMINISTIC MODEL NEURAL NETWORK
Simulation Information for results presented in fig. 3.4 and fig. 3.5:Data file : 21052003 rabbit flash newlocation001.txt (electrode 9 / unit 4)Model Parameters:
early layers: θ = −0.001 φ = 5.048 α = 13.841integrate and fire: γ = 22.929 ρA = 0.026
Extraneous Parameters:delay = 55ms window = 64ms a = 0.01 q = 0.01ms−1
Table 3.1: Deterministic model, flash stimulus parameters.
Different stimulus have to be applied, to verify the model validity. Taking as the
stimulus a square wave with a much lower duty cycle, less then 1% and near impulse,
the same experiments were performed. The results in fig. 3.6 and fig. 3.7 were not as
good as the ones observed in the previous figures. In fact, the training resulted only in
a gain adjustment (φ), because the limited duration of the stimulus inhibits significative
changes in the output with the variation of the other two parameters, α and θ, furthermore
training the θ for this specific stimuli resulted in negative values and firing rates, which is
not theoretically possible. In such cases the θ value was reset to zero. As the experimental
results exhibit spikes outside this duration, the model is also unable to reproduce those
spikes. Information about the simulation is presented in table 3.2.
The importance of the q value in the metric is easily seen with this last kind of
stimulus. In fact, making q → 0 (the cost for displacing a spike is almost null), the
relative distance of the spikes loses relevance regarding to the number of spikes. As a
consequence the minimum will be found when the number of predicted spikes is the same
as the experimental ones, despite of different time positions. On the other hand, if the
cost of displacing a spike is to high, the minimum will appear for exact matching positions
of the spikes times, which is hard for the model to achieve and will probably lead to the
removal of all the spikes.
Simulation Information for results presented in fig. 3.6 and fig. 3.7:Data file : 21052003 rabbit flash newlocation031.txt (electrode 9 / unit 4)Model Parameters:
early layers: θ = −0.001 φ = 4.918 α = 1.339integrate and fire: γ = 13.716 ρA = 0.047
Extraneous Parameters:delay = 52ms window = 64ms a = 0.01 q = 0.15ms−1
Table 3.2: Deterministic model, impulse stimulus parameters.
The type of stimuli used to attain the experimental responses is described in detail on

3.3. EXPERIMENTAL RESULTS 27
the private pages of [1]. The flash stimulus correspond to the full-field flashes where the
complete stimulation area is illuminated with a spatial color constant stimulus, while the
impulse stimulus is a special form of the full-field stimulation where the display time of
flashes is short in duration.
6 8 10 12 140
0.5
1
Stim
ulus
6 8 10 12 14
0.5
1
Tar
get
6 8 10 12 14
0.5
1
Out
put
6 8 10 12 14
Time [s]
(a) Spike trains comparison (the predicted and the pretended).
6.65 6.7 6.75 6.8 6.85 6.90
0.5
1
Stim
ulus
6.65 6.7 6.75 6.8 6.85 6.9
0.5
1
Tar
get
6.65 6.7 6.75 6.8 6.85 6.9
0.5
1
Out
put
6.65 6.7 6.75 6.8 6.85 6.9
Time [s]
(b) More detailed view of the spike response in one stimulusperiod.
Figure 3.6: Deterministic model spike results for impulse stimulus.

28 CHAPTER 3. DETERMINISTIC MODEL NEURAL NETWORK
6.65 6.7 6.75 6.8 6.85 6.90
1
2
3
4
5
6
Time [s]
Am
plitu
de
StimulusNN OutputTarget Firing Rate
(a) Neuronal approximation results.
0 50 100 150 200 250−1
0
1
2
3
4
5
6
Wei
ghts
Val
ues
Epochs
(b) Weights evolution.
Figure 3.7: Deterministic model neural network results for impulse stimulus.

Chapter 4
Stochastic Model Neural Network
This chapter presents the work performed for the stochastic model, following an ap-
proach similar to the adopted for the deterministic model.
As in chapter 3 the simplifications are presented and the overall performance of the
NN is introduced along side with some results.
4.1 Model Linearization and Simplifications
As in the previous chapter, some simplifications were necessary. Basically, having in
account the model as presented in section 2.2, similar problems arose in the spike gener-
ation mechanism. However, the process used to circumvent the problem was different. A
linearization over the whole model was performed, including the spike mechanism. This
option was made with the intention of having just a NN as the model and not a junction
of a NN with a minimum search algorithm, as in chapter 3.
This process originated some doubts, in respect to the performance of the NN, because
of the simplifications needed and the feedback branch present in the model. First, the
simplifications only approximate the model, and so, their influence is present and cannot
always be disregarded, especially, as the approximation is made over a discrete space
into a continuous equivalent. Furthermore, in the feedback branch, an infinite impulse
response filter is present, inserting memory in the whole system and causing problems in
the derivative process needed for the NN implementation.
For the implementation itself, the non linear rectifier block in model of figure 2.5
must have a continuous output making the gradient calculus possible. By looking to the
eq. 2.16 of the rectifier, the h(t) can be discarded since it only defines the amplitude of the
spikes and this information is absent in the experimental data. Thus we have a continuous
function which brings some implementation issues. One of these issues results from the
use of a sampling period needed in the implementation. A discrete equivalent used for
29

30 CHAPTER 4. STOCHASTIC MODEL NEURAL NETWORK
eq. 2.16 was:
r(n) = H(h(n)− θ) ·H(θ − h(n− 1)). (4.1)
This equation is responsible for the rise of a spike event whenever the current input
is higher than the threshold θ and the previous is lower (it exercises a logic conjunc-
tion of both conditions). This discrete function is feasible and the respective continuous
equivalent used is differentiable,
r(t) = I(h(t)− θ) · I(
θ −∫ t
0
h(τ)D(t− τ)∂τ
), (4.2)
where,
I(t) =1
2+
1
πarctan(a · t), (4.3)
D(t) = −δ(t) +4
Ts
e−2Ts·t (4.4)
D(t) is an all pass filter that introduces a delay equal to Ts seconds. This filter is
merely formal, since the discrete implementation will only include an unit sample delay.
The constant a in I(t) is a tunable parameter that defines the degree of approximation
obtained in relation to the original r(t) (see fig.4.1).
−1 −0.5 0 0.5 10
0.2
0.4
0.6
0.8
1
x
I (x)
Heaviside Approximation
Heavisidea=10a=30a=50a=100
Figure 4.1: Heaviside approximation.
As all other blocks from eq. 2.12 to eq. 2.17 are already linear and differentiable, there
are no more changes needed.

4.2. IMPLEMENTING THE MODEL 31
4.2 Implementing the Model
Several aspects of the implementation are common to the ones presented in sections
3.1 and 3.2, namely, the stimuli reconstruction, the firing rate estimation and the NN
training methods. For that reason, they will not be focused in this chapter.
4.2.1 The neural network
The model signals, as presented in figure 2.5, are described by the following equations:
g(t) =
∫ t
0
s(τ)F (t− τ)∂τ (4.5)
r(t) = I(h(t)− θ) · I(θ −∫ t
0
h(τ)D(t− τ)∂τ) (4.6)
p(t) =
∫ t
0
r(τ)P (t− τ)∂τ (4.7)
h(t) = g(t) + p(t) (4.8)
Their derivatives are:
• In order to the filter’s coefficients:
∂C
∂kj
= 2 · e(t) · ∂r(t)
∂kj
∂r(t)
∂kj
=∂h(t)
∂kj
·[I ′(h(t)− θ) · I
(θ −
∫ t
0
h(τ)D(t− τ)∂τ
)
− I(h(t)− θ) · I ′(
θ −∫ t
0
h(τ)D(t− τ)∂τ
)]
∂h(t)
∂kj
=∂g(t)
∂kj
+∂p(t)
∂kj
=
∫ t
0
s(τ) · fj(t− τ)∂τ +
∫ t
0
∂r(τ)
∂kj
P (t− τ)∂τ
(4.9)

32 CHAPTER 4. STOCHASTIC MODEL NEURAL NETWORK
• In order to θ:
∂C
∂θ= 2 · e(t) · ∂r(t)
∂θ
∂r(t)
∂θ=
(∂h(t)
∂θ− 1
) [I ′(h(t)− θ) · I
(θ −
∫ t
0
h(τ)D(t− τ)∂τ
)
− I(h(t)− θ) · I ′(
θ −∫ t
0
h(τ)D(t− τ)∂τ
)]
∂h(t)
∂θ=
∂p(t)
∂θ=
∫ t
0
∂r(τ)
∂θP (t− τ)∂τ
(4.10)
• In order to a generic variable of P (t), ε:
∂C
∂ε= 2 · e(t) · ∂r(t)
∂ε
∂r(t)
∂ε=
∂h(t)
∂ε·[I ′(h(t)− θ) · I
(θ −
∫ t
0
h(τ)D(t− τ)∂τ
)
− I(h(t)− θ) · I ′(
θ −∫ t
0
h(τ)D(t− τ)∂τ
)]
∂h(t)
∂ε=
∂p(t)
∂ε=
∫ t
0
r(τ)∂P (t− τ)
∂ε∂τ +
∫ t
0
∂r(τ)
∂εP (t− τ)∂τ
(4.11)
• Specifying for each of the parameters of P (t),
∂P (t)
∂B= e
− tτp (4.12)
∂P (t)
∂τp
=B · tτp
· e− tτp (4.13)
where I(t) is the linearized rectifier and I ′(t) = ∂I(t)∂t
.
With all the above formulas, the gradient is calculated by applying:
~∇J =15∑
j=1
∂C
∂kj
~ekj+
∂C
∂θ~eθ +
∂C
∂B~eB +
∂τp
∂φ~eτp . (4.14)
4.2.2 The minimum search based algorithm
Despite the already introduced approach, where the whole model is a NN, the hy-
pothesis of splitting it in a similar manner as in the deterministic model was taken in
account. In such implementation the NN became much simpler, since it is composed only

4.2. IMPLEMENTING THE MODEL 33
by the filter F (t). Picking up eq. 4.9, the terms which follow 2 · e(t) are replaced by the
derivatives of the filter itself, resulting in:
∂C
∂kj
= 2 · e(t) ·∫ t
0
s(τ) · fj(t− τ)∂τ. (4.15)
In this case all the general concepts, presented in the corresponding section of 3.2,
hold even with the augmented search space. This new search space is defined by the B,
τp and θ constants of the rectifier block and its feedback branch (see equations 2.15 and
2.16) and the used metric is the same.
Although the graphical analysis of this 3-dimensional search space is not direct, since
it would involve a 4-dimensional representation, it is worthwhile to have a graphical
representation for a better understanding of the error evolution with variation of the
parameters. To surpass the dimensional problem, each one of the three parameters is set
constant while the other two varies. The result of such analysis is depicted in fig. 4.2.
Figure 4.2: Error surface of the metric.
The same type of behavior as in the integrate-and-fire scheme is observed, as the
presence of curved valleys is preserved.
It is worth mentioning that in order to use this algorithm, a estimation of the input
to the spike generator mechanism is needed. As in the deterministic model, a convolution
between a Hanning window and the experimental data was performed. This method gave
the firing rate estimate in the deterministic model but is also suitable as an approximation
of the generation potential g(t), because it relates the events with the potential activity
timing and the most relevant feature of the firing rate is its strength through time.

34 CHAPTER 4. STOCHASTIC MODEL NEURAL NETWORK
4.3 Experimental Results
As expected, the results obtained by the application of NN to the model revealed
some important problems. Every trials in the training procedure resulted in an almost
immediate convergence to nearby weight values, independent of the respective initializa-
tions. This indicates the presence of local minima and suggests an very irregular cost
surface. This was a direct result of the complexity added with the inclusion of an infinite
impulse response filter in the feedback branch and the approximation made for the spike
generation mechanism.
To deal with that problem, the respective source (the rectifier and feedback branch
NN) was discarded. In its place and once more, the use of a minimum search algorithm
has proven worthy both in results, as seen in fig. 4.3, and simplicity.
The presented results follow the same structure used for the deterministic model, so
that an experimental comparison between their performance can be easily achieved. The
data and parameters are in tables 4.1 and 4.2 and follow the description made in the
experimental results of the last chapter. The NN parameters are deferred to appendix B
since they do not convey an intuitive notion about the filter properties. The data file
and the corresponding electrode and unit used are referred in the first row of the tables.
The second row of the table states the minimums found for the spike generator. The last
row shows important constants used, like the Hanning window size, the q parameter of
the metric, already explained, and the τF that defines the time length of filter F (t) basis
functions (see eq. 2.12 and eq. 2.13).
Starting by the square wave with a duty cycle of 15% for the stimulus, and analyzing
the overall results in fig. 4.3, the predicted spikes have a good alignment with the desired
ones, considering that no special pre-processing was made in order to achieve this, which
indicates a remarkable adaptability of the filter. On the other hand, zooming on one period
of the stimulus, even though the number of spikes is similar in both trains, the relative
location between them is not very accurate. This lack of accuracy can be explained by
observing the results in fig. 4.4. The NN revealed serious problems in trying to reproduce
the target generator potential, although all weights converged as depicted in fig. 4.4(b).
Simulation Information for results presented in in fig. 4.3 and fig. 4.4:Data file : 21052003 rabbit flash newlocation001.txt (electrode 9 / unit 4)Model Parameters:
spike mechanism: θ = 1.852 B = −18.376 τP = 0.001Extraneous Parameters:
τF = 500ms window = 64ms a = 100 q = 0.10ms−1
Table 4.1: Stochastic model, flash stimulus parameters.

4.3. EXPERIMENTAL RESULTS 35
0 2 4 6 8 100
0.5
1
Stim
ulus
0 2 4 6 8 10
0.5
1
Tar
get
0 2 4 6 8 10
0.5
1
Out
put
0 2 4 6 8 10
Time [s]
(a) Spike trains comparison (the predicted and the pretended).
4.5 5 5.5 60
0.5
1
Stim
ulus
4.5 5 5.5 6
0.5
1
Tar
get
4.5 5 5.5 6
0.5
1
Out
put
4.5 5 5.5 6
Time [s]
(b) More detailed view of the spike response in one stimulusperiod.
Figure 4.3: Stochastic model spike results for flash stimulus.
In respect to the impulse stimulus responses, a better but undervalued response is
attained for the filter as seen in fig. 4.6. This happens because the stimulus periodicity is
not exactly as expected, in fact, some significant variability is present in the onset portion
of the impulse stimulus. Moreover, it can be detected two principal onset time lengths
of 10 and 20 ms. As a consequence, the network will underestimate or overestimate the
response because of the filter’s dependence on the onset time length (F (t) is a low pass
filter as detailed in appendix B).
The alignment shown in fig. 4.5(b) is not as good than those of the deterministic

36 CHAPTER 4. STOCHASTIC MODEL NEURAL NETWORK
4.5 5 5.5 6−1
0
1
2
3
4
5
6
Time [s]
Am
plitu
de
StimulusNN OutputTarget Generator Potential
(a) Neuronal approximation results.
0 50 100 150 200 250−0.1
−0.05
0
0.05
0.1
Wei
ghts
Val
ues
Epochs
(b) Weights evolution.
Figure 4.4: Stochastic model neural network results for flash stimulus.
model but no pre-processing was applied for that specific purpose. This can be seen as
an advantage and another important benefit is that the model’s response is not cropped
by the stimulus onset time, which makes it able to predict spikes that the deterministic
model can not. This is expected to exert a big influence on the performance analysis of
the two models.
The original model, as presented in section 2.2, includes two gaussian noise sources
that were not included. The sole purpose of such sources is to resemble the variability
and the ambiguity of the neural code. These sources can not be included in the training
process as they are ”external” to the model, but could be introduced in a later performance
analysis, in order to see their influence in approximating real data variability.

4.3. EXPERIMENTAL RESULTS 37
15 16 17 18 19 20 21 220
0.5
1
Stim
ulus
15 16 17 18 19 20 21 22
0.5
1T
arge
t
15 16 17 18 19 20 21 22
0.5
1
Out
put
15 16 17 18 19 20 21 22
Time [s]
(a) Spike trains comparison (the predicted and the pretended).
15.5 15.55 15.6 15.65 15.7 15.75 15.8 15.850
0.5
1
Stim
ulus
15.5 15.55 15.6 15.65 15.7 15.75 15.8 15.85
0.5
1
Tar
get
15.5 15.55 15.6 15.65 15.7 15.75 15.8 15.85
0.5
1
Out
put
15.5 15.55 15.6 15.65 15.7 15.75 15.8 15.85
Time [s]
(b) More detailed view of the spike response in one stimulusperiod.
Figure 4.5: Stochastic model spike results for impulse stimulus.

38 CHAPTER 4. STOCHASTIC MODEL NEURAL NETWORK
15.5 15.55 15.6 15.65 15.7 15.75 15.8 15.85−1
0
1
2
3
4
5
Time [s]
Am
plitu
de
StimulusNN OutputTarget Generator Potential
(a) Neuronal approximation results.
0 50 100 150 200 250−0.1
−0.05
0
0.05
0.1
Wei
ghts
Val
ues
Epochs
(b) Weights evolution.
Figure 4.6: Stochastic model neural network results for impulse stimulus.
Simulation Information for results presented in in fig. 4.5 and fig. 4.6:Data file : 21052003 rabbit flash newlocation031.txt (electrode 9 / unit 4)Model Parameters:
spike mechanism: θ = 1.168 B = −17.078 τP = 0.003Extraneous Parameters:
τF = 500ms window = 64ms a = 100 q = 0.10ms−1
Table 4.2: Stochastic model, impulse stimulus parameters.

Chapter 5
Comparison and Analysis of the
Models
To evaluate both models performance the results must be put side by side and some
error measure has to be performed. It is this error measure that will provide some insight
about the difficulties that each model finds when trying to adapt to the experimental
data.
The error measures used are based in spike counts, the metric presented on section 3.2
and the Mean Squared Error (MSE). The first two are used directly with the spike trains
and the last one takes the NN results and compares them with the firing rate estimations.
5.1 Error Evaluation
The errors described in the next three sections are calculated using individual mea-
sures between the predicted and the experimental counterpart of each trial. Each trial
is composed by 4 successive patterns like the ones used for the NN training. With this
trials the number of error values is reduced and can be easily visualized in graphics.
5.1.1 Spike number errors
For the first error, the number of spikes obtained through simulation is subtracted
from the number of experimental spikes and then divided by the same value. With this
simple operation a percentage error, EC , is found with ease by the following equations:
39

40 CHAPTER 5. COMPARISON AND ANALYSIS OF THE MODELS
Np =
∫ρp(t)dt (5.1)
EC =|Ns −Ne|
Ne
× 100% (5.2)
where the subscripts s and e of N denote the number of predicted and the number of
experimental spikes. ρp is the neural response function of eq. 2.18.
Despite its simplicity, this simple percentage serves as a first glimpse of the models
efficiency. In fact, as several studies point out that the number of spikes and the time lag
between the first two spikes in an event is what conveys the major part of the information
[10], this is a good starting point to measure the discrepancy between the models predicted
spikes and the experimental spikes.
Figure 5.1 shows a plot of the percentage errors for the predicted number of spikes.
Both models are taken into account as well as the different stimuli used.
0 5 10 15 200
20
40
60
80
100
Pattern
Err
or
Deterministic ModelStochastic Model
(a) Flash stimulus.
0 5 10 15 20 250
20
40
60
80
100
Pattern
Err
or
Deterministic ModelStochastic Model
(b) Impulse stimulus.
Figure 5.1: Percentage error for spike counts.
Again, it is evident the worse performance of the deterministic model when applying
an impulse stimulus. For the flashes both models achieve a good prediction and the
deterministic one performs slightly better than the stochastic model.
5.1.2 Metric errors
As a second indicator the values of the cross spike metric of section 3.2 are used. The
q constant is set to 0.01ms−1 as to certify that the same error conditions are used for all
the simulations. The cross spike errors are displayed in fig. 5.2.

5.1. ERROR EVALUATION 41
0 5 10 15 200
10
20
30
40
50
Pattern
Err
or
Deterministic ModelStochastic Model
(a) Flash stimulus.
0 5 10 15 20 250
10
20
30
40
50
Pattern
Err
or
Deterministic ModelStochastic Model
(b) Impulse stimulus.
Figure 5.2: Cross spike errors for the predicted trains.
As in the spike count error, the same kind of observations can be made. The stochastic
model has better overall results, despite the good performance of the deterministic model
for the flashes stimuli. The error variability also increases for the impulse stimuli as it
did in the last error measure.
5.1.3 Mean Squared Error (MSE)
So far, only the output of the models was used. That is not enough for the performance
analysis of the Artificial Neural Networks. To have acceptable measures for the NN
performance, the desired output must be used, that is, the firing rate estimation has to
appear in the error calculation.
Having the output of the NN and the firing rate estimation, the MSE is used to
evaluate the performance of the network. This measure can be defined by:
MSE =1
N
N∑n=1
(f ′r(n)− fr(n))2
(5.3)
where f ′r(t) is the NN predicted firing rate and fr(t) is the estimated firing rate.
The evolution of the performance is similar in both the MSE for the NN and the
previous error measures in which the spike events are directly used (the same general
features can be observed in fig. 5.3).
A more detailed analysis must be performed as to discuss the advantages and draw-
backs of the different models as well as some possible improvement solutions.

42 CHAPTER 5. COMPARISON AND ANALYSIS OF THE MODELS
0 5 10 15 200
0.2
0.4
0.6
0.8
1
Pattern
Err
or
Deterministic ModelStochastic Model
(a) Flash stimulus.
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
Pattern
Err
or
Deterministic ModelStochastic Model
(b) Impulse stimulus.
Figure 5.3: Mean Square Error of the artificial neuronal network adaptation.
5.2 Error Analysis and Discussion
Taking some statistics over the errors presented in last section.
Deterministic Model Stochastic ModelFlash Impulse Flash Impulse
EC µ 6.244 62.340 13.986 23.210σ 6.082 11.428 8.024 14.127
Metric µ 11.914 27.436 17.375 17.005σ 2.028 6.628 3.248 5.316
MSE µ 0.164 0.566 0.287 0.182σ 0.047 0.162 0.070 0.079
Table 5.1: Statistical properties of the errors.
Table 5.2 presents the mean and the standard deviation over the error values obtained
in the last section. It is evident the loss of efficiency for the deterministic model in the case
of impulse stimuli, as its mean errors increase in a much more drastic manner as those
observed for the stochastic model. This is due to the already referred problem of the
model response limitation to the short onset time length of the stimulus. Nevertheless
the spike events are there and have an explanation, especially as they exhibit a very
regular behavior which is easily seen by the second peak observed of fig. 3.2 of the cross
correlation analysis.
This observed peak is a typical event for high contrast full field stimulations, the ones
used in this work, that corresponds to a ganglion cell network effect. When the full field
stimulus is presented to the retina, the ganglion cell network becomes globally stimulated
evoking a first response. This stimulus originates lateral and vertical processes in all cells

5.2. ERROR ANALYSIS AND DISCUSSION 43
of the retina, so depending of the active connection pathways and the stimulus signal,
some additional late activity peaks may occur. This must be taken in account for a correct
biological retina model and in the present case, it is not.
An attempt to diminish that error could be performed by including delayed versions
of the stimulus at the model’s input. However such a solution lacks in flexibility because
each cell has its own network position.
The stochastic model deals well with that effect, denoting the F (t) filter (eq. 2.12)
flexibility in following the experimental results, as long as its time length is long enough to
cover those effects. The flexibility offered by the filter have the disadvantage in allowing
overfit to experimental data, making the model less generalizable. Another benefit of this
model is that no pre-processing is needed, in contrast to the deterministic. It is thus,
not susceptible to errors that arise from applying methods such as the cross correlation
analysis. One interesting particularity was the low pass characteristic of the F (t) filter
(as concluded in appendix B), since the deterministic model has a high pass temporal
filter instead.
The errors from a simple count of the spikes and from the metric can also be compared,
since in the limit where q → 0 the two are identical. On the other hand, as q rises the
relative spike time positions gains importance face to the simple count of spikes. This is
seen for the stochastic model where a increase on the count error percentage, from flash
stimuli to impulse stimuli, leads to a decrease of the metric error.
This enforces a deeper analysis about the value of q used for the error measure and
the one used for the minimum search algorithm. For the experimental q, a prior analysis
was made in order to have intuition about the displacement between the spikes. It makes
sense to have different values of q according to the necessities of each model and char-
acteristics of each stimulus. A particular case is the one that exhibit the worst results
(deterministic model, impulse stimuli, fig. 3.6), because if q were smaller, the model would
try to compensate the outside stimulus spikes by firing them inside the onset scope of
the stimulus. However, this may not be the preferable solution from the biologic point
of view. The q value used in this chapter was always the same to assure the coherence
between the error measures.
At last the MSE used to evaluate the NN performance confirmed all the above results.
The deterministic model had both the minimum and the maximum error value, in fact,
its neural network had the best performance when adjusting itself to the estimated firing
rate originated by flash stimuli despite its weak flexibility face to the stochastic model.
The standard deviations present in table 5.2 reveal a higher variability of the obtained
responses when the impulse stimuli is applied which is due to the already mentioned onset
different time lengths present. The stochastic model is also more stable which is seen by

44 CHAPTER 5. COMPARISON AND ANALYSIS OF THE MODELS
the smaller changes in its mean errors standard deviations.

Chapter 6
Conclusions
The first step in the rehabilitation of visual impaired persons is the understanding of
the human visual system and the involved biological processes. This lead to the develop-
ment of models capable of reproducing the neural coding of the retina with the purpose
of creating visual neuroprosthesis.
This work focused on two models, which require some prior knowledge about its pa-
rameters. To reduce this a priori knowledge necessity Artificial Neural Networks were
introduced. However instead of using the traditional concept of a NN, the topology of the
models was embedded in the NN itself. The new approach has the advantages of a small
number of adjustable weights, a reduced complexity of the NN, it also prevents some
overfitting problems and, above all that, it retains the models insight on the biological
systems. Thus it is possible to relate the adjusted weights to the models, in contrast to
classical Artificial Neural Network.
Such solution, however, encounters problems in dealing with the discrete events,
namely from the neural coding (spike events), since Artificial Neural Networks rely on
the continuous and differentiable properties of their internal signals. A simplistic solu-
tion, entitled the minimum search algorithm, was adopted for dealing with such discrete
spaces. This solution uses directly the experimental spike events times to measure the
error present in the predicted responses and it does so by using a cross spike metric [9],
that takes in account the number of predicted spikes as well as their position in time.
With the developed system, neural responses were well predicted even with only an
approximate procedure to predict the firing rate. Despite the similar characteristics of
the stimuli, as they both were square temporal waves (space homogeneous signals) only
differing in their duty cycle, the models capabilities became evident.
The deterministic model proved to be able of predicting the responses in which the
observed events where contained in the time interval of the stimulus onset. On the other
hand, as it failed to predict spikes outside that interval, a high error for short duration
45

46 CHAPTER 6. CONCLUSIONS
stimulus was found. In such cases, the stochastic model revealed a better performance by
maintaining the prediction errors close in value.
The different behaviors of the models were explained by analyzing their structure. The
deterministic relies in a half wave rectified high pass filtering and so it can not replicate
experimental results that are outside the temporal scope of the stimulus presented as
input. On the other hand, the stochastic model is not so affected by the stimuli temporal
scope, where the flexibility of its filter along with its temporal length has a major influence
on predicting such results. Furthermore, by the inclusion of two appropriate noise sources,
the stochastic model can be improved to resemble the variability and the ambiguity of
the neural code. This feature can be easily included in the integrate and fire schema of
the deterministic model as well.
The stochastic model presented a more regular behavior since it did not had a signif-
icant error variation relatively to the stimulus applied, however the resulting stochastic
model filter revealed a dependency on the stimuli, as the filters obtained for flash stimulus
and impulse stimuli were different. The discrepancy in the filters is due to the limited
number of stimuli used and reveals an overfit to the experimental data.
6.1 Future work
Obvious directions for future work include extending the results to a wider set of
stimuli with a more complex temporal behavior and spatial characteristics. Such selection
of stimulus would allow to evaluate the performance of the deterministic model spatial
filter and to extend the stochastic model with a spatial dimension. The use of a wide set
of different stimuli would be an important step for validating the models analyzed in this
work.
Different solutions for the learning mechanisms should also be considered, specially
with the encountered difficulties in dealing with discrete events. Genetic algorithms are
a possibility, since they are not limited to differentiable models neither to particular cost
functions. Such algorithms could also be used together with Artificial Neural Networks.
The evaluation of different retina models is also of interest, since it could bring new
improvements regarding the two models already analyzed.

Appendix A
Human Visual System
The human visual system is based on a series of optical and neural transformations.
To understand how these transformations can be mapped into the models described in
this report, insights on the works of the biological visual system are needed. The sole
purpose of this appendix is to provide these insights to the reader. The references used
are [11], [12], [13], [2] and [6].
A.1 The Human Eye
To achieve this goal a schematic representation of the eye, fig. A.1, must be compre-
hended and analyzed. From simple observation, similarities with real record cameras are
visible. The first one is that the eye has a lens that enables focus and an iris that controls
the quantity of light entering throw the lens. The focus is controlled by the contraction
or extension of the ciliary body.
�����
Figure A.1: Schematic representation of the human eye [11].
47
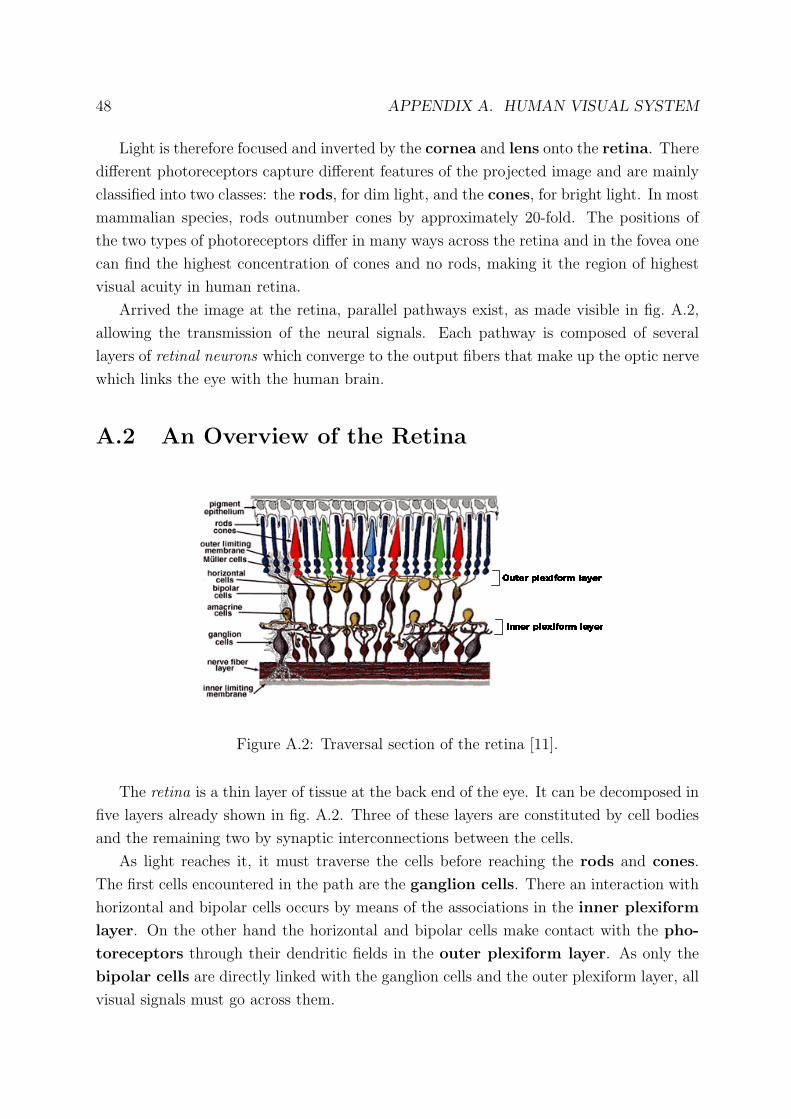
48 APPENDIX A. HUMAN VISUAL SYSTEM
Light is therefore focused and inverted by the cornea and lens onto the retina. There
different photoreceptors capture different features of the projected image and are mainly
classified into two classes: the rods, for dim light, and the cones, for bright light. In most
mammalian species, rods outnumber cones by approximately 20-fold. The positions of
the two types of photoreceptors differ in many ways across the retina and in the fovea one
can find the highest concentration of cones and no rods, making it the region of highest
visual acuity in human retina.
Arrived the image at the retina, parallel pathways exist, as made visible in fig. A.2,
allowing the transmission of the neural signals. Each pathway is composed of several
layers of retinal neurons which converge to the output fibers that make up the optic nerve
which links the eye with the human brain.
A.2 An Overview of the Retina
�����������������
����������������
Figure A.2: Traversal section of the retina [11].
The retina is a thin layer of tissue at the back end of the eye. It can be decomposed in
five layers already shown in fig. A.2. Three of these layers are constituted by cell bodies
and the remaining two by synaptic interconnections between the cells.
As light reaches it, it must traverse the cells before reaching the rods and cones.
The first cells encountered in the path are the ganglion cells. There an interaction with
horizontal and bipolar cells occurs by means of the associations in the inner plexiform
layer. On the other hand the horizontal and bipolar cells make contact with the pho-
toreceptors through their dendritic fields in the outer plexiform layer. As only the
bipolar cells are directly linked with the ganglion cells and the outer plexiform layer, all
visual signals must go across them.

A.3. PARALLEL PATHWAYS AND COLOR VISION 49
Another class of cells seen in the figure at the top of the page is the amacrine cells.
These only have identifiable dendrites, which connect in the inner plexiform layer, and
function as inhibitory cells on the axon terminals of bipolar cells, thus managing their
output to ganglion cells. They also perform dedicated tasks concerned with shaping
and control of ganglion cell responses. An interesting observation is that direct synapses
from bipolar cells are a minority of all synapses of ganglion cells and so many traditional
presentations of the retina underweight the importance of amacrine cells.
A.3 Parallel Pathways and Color Vision
As the retina is stimulated by light, one type of bipolar cell hyperpolarizes, and the
other depolarizes. The distinction, created at the first retinal synapse, is propagated
throughout the visual system.
This gives rise to the classification of bipolar cells as ON or OFF, which occur in
approximately equal numbers. The classes of ON and OFF bipolars are each fur-
ther subdivided in order to provide separate channels for high-frequency (transient) and
low-frequency (sustained) information. However it is important to notice that there are
no dedicated cones at the other extremity of the visual system, instead the output of
each cone is tapped by several bipolar cell types to provide many parallel channels, each
communicating a different version of the cone’s output to the inner retina.
Another thing that should be noticed is the non-chromatically behavior of the bipolar
cells, preventing the retina from discriminating among wavelengths. As a consequence
a single type of cone cannot create color vision and its output is a single signal, which
can vary only on magnitude. For that reason, a cone’s signal to the brain is inevitable
ambiguous and to surpass that the outputs of at least two cones must be compared.
In order to compare the outputs, two types of cones are needed, one reporting on long
wavelengths and one on short; by comparing their outputs, the retina can create a single
signal that reflects the spectral compositions of the stimulus. The synaptic connections
of the inner retina are arranged so that the outputs of some ganglion cells compare the
responses of the short-wavelength-sensitive cones with those of the long-wavelength cones.
Most amacrine and all ganglion cells receive their main bipolar cell synapses from
cone bipolars, but retinas work in starlight as well as daylight, and this range is created
by a division of labor between cones and rods. Signals originating in rod photorecep-
tors reach the retinal ganglion cells via an indirect rout using as its final path the axon
terminals of the cone bipolar cells. By synapsing on the axon of the cone bipolar cells,
the rod pathway gains access to the elaborate circuitry of the cone pathway, including
its associated amacrine circuitry.

50 APPENDIX A. HUMAN VISUAL SYSTEM
A.4 LGN and Visual Cortex
The upside-down pattern evidenced in the retinal image is preserved as neurons from
the retina connect to the Lateral Geniculate Nucleus (LGN) through the optic nerve, and
is still further preserved along the cortex. Despite the stereo vision that humans have,
two eyes; the brain does not keep the information of the two retinas separate. Instead,
it splits the world into left and right visual fields. As the outputs of each eye leave the
retina, a separation occurs. The nasal (toward the nose) half of each eye’s visual field
crosses from one side to the other at the optic chiasm and the temporal half (towards
the temple) remains on the same side as the eye-of-origin. This splitting and crossing
re-organizes the retinal outputs so that the left hemisphere process information from the
right visual field and the right hemisphere processes information from the left visual field.
Figure A.3: The human visual pathways [12].
From the optic chiasm the signal travels through the optic track and reaches the LGN
- see fig. A.3. The signal is also sent to the midbrain for eye muscles control.

A.5. KEY NOTIONS 51
Retinal ganglion cells come in two sorts: M (magnocellular, or parasol) and P (par-
vocellular, or midget). P cells exhibit color-opponent responses evidence by their firing
dependency in the wavelength of light in their receptive fields. M cells do not exhibit
this property but are responsible for the transient responses firing action potentials when
a stimulus is introduced, but with a fading characteristic with the immutability of the
same. P cells, meanwhile, give sustained responses to stimuli in their receptive field.
The division of M and P pathways becomes anatomically evident in the LGN. While
the receptive fields of LGN neurons look a lot like retinal ganglion cells, the LGN does re-
organize these circuits into distinct layers. It is also there that a type of signal processing
of extreme importance happens: a non-linear amplification. This amplification is used
as a mean to compensate the delay between the detection of the visual stimulus in the
retina’s photoreceptors and the arrival of the signal to the visual cortex.
As the signal leaves the LGN it is transported into the primary visual cortex, V1.
Because the signal is still separated in two, there are two correspondent V1s in each
person (left and right hemispheres). There are approximately 30 visual areas after V1;
some of them seem to be specialized for processing a certain aspect of visual information,
like motion, color and shapes.
In the primary visual cortex there are three main types of cells; simple, complex and
end-stopped. Their receptive fields are very different of the concentric ones observed in
the ganglion cells of the retina or the neurons in the LGN. The cells who belong to
the first type respond to a light/dark edge (contrast); the complex ones are direction-
selective or motion sensitive; the end-stopped cells exhibit length summation and are
motion sensitive.
A.5 Key Notions
The retinal ganglion cells represent the output of the retina by firing action potentials.
These electrical spikes are responsible for the transmission of information in the brain.
Spikes are all-or-none, discrete, stereotyped events that occur above a certain threshold-
level input. A refractory period is present preventing the neuron from firing consecutive
action potentials. It is the firing rate of the neuron that represents information about
stimulus intensity within each neuron.
Retinal ganglion cells fire action potentials in response to certain types of retinal
stimulation. For this to happen, a part of the retina ganglion cells, named receptive fields,
must be stimulated. Most retinal cells have concentric (or center-surround) receptive
fields. These receptive fields are mostly divided in two parts (center/surround), one of
which is excitatory (ON), the other inhibitory (OFF), as shown in the graphics of fig. A.4.

52 APPENDIX A. HUMAN VISUAL SYSTEM
Figure A.4: Receptive field center-surround organization.
For an On/OFF center/surround cell, a spot of light shown on the inside (center) of
the receptive field will elicit spikes, while light falling on the outside ring (surround) will
suppress firing below the baseline rate. The opposite is true for an OFF/ON cell. Though,
visual neurons are not limited to the above, and indeed exhibit interdependency, as the
activity of a given neuron is affected by those who are nearby. In fact when a ganglion
cell fires action potentials, it also inhibits the firing of lateral ganglion cells. The same
type of comportment is present in the LGN with the addition of a non linearity.

Appendix B
Filter Analysis
In this appendix two filters will be described and analyzed in a brief manner. Both
filters follow the equations:
F (t) =N∑
j=1
kjfj(t),
fj(t) =
{sin(πj(2 t
τf− ( t
τf)2)), 0 ≤ t ≤ τf
0 , otherwise.
and they only differ in the kj weights. They both concern to the stochastic model.
B.1 Flash Stimulus
The weights adjusted by the NN were the following:
k1 = −0.00072 k6 = −0.00675 k11 = −0.00118
k2 = 0.01163 k7 = −0.00435 k12 = 0.00283
k3 = 0.02566 k8 = −0.00234 k13 = −0.00395
k4 = 0.01349 k9 = 0.00107 k14 = 0.00370
k5 = 0.00625 k10 = 0.00185 k15 = −0.00496
With the combination of the 15 weights kj above, the filter was reconstructed allowing
to illustrate its impulsive and frequency response, which are depicted in fig. B.1.
From the figure analysis, the most important characteristic to extract is the low pass
behavior of this filter.
53

54 APPENDIX B. FILTER ANALYSIS
0 0.1 0.2 0.3 0.4 0.5−0.04
−0.02
0
0.02
0.04
0.06
Time [s]
Am
plitu
de
(a) Impulsive Response
10−3
10−2
10−1
−80
−60
−40
−20
0
20
Frequency (kHz)
Mag
nitu
de (
dB)
(b) Frequency Response
Figure B.1: Impulsive and frequency response.
B.2 Impulse Stimulus
The weights adjusted by the NN, for an impulse stimulus input, are presented next:
k1 = 0.10212 k6 = −0.05600 k11 = 0.02150
k2 = 0.08494 k7 = −0.03255 k12 = 0.00473
k3 = 0.05066 k8 = −0.00003 k13 = −0.00159
k4 = 0.04769 k9 = −0.01508 k14 = 0.00005
k5 = 0.00057 k10 = −0.00126 k15 = 0.00159
With the combination of the 15 weights kj above, the filter was reconstructed allowing
to illustrate its impulsive and frequency response, which are depicted in fig. B.2. Again
the low pass characteristic is evident.
0 0.1 0.2 0.3 0.4 0.5−0.1
0
0.1
0.2
0.3
0.4
Time [s]
Am
plitu
de
(a) Impulsive Response
10−3
10−2
10−1
−80
−60
−40
−20
0
20
40
Frequency (kHz)
Mag
nitu
de (
dB)
(b) Frequency Response
Figure B.2: Impulsive and frequency response.

References
[1] Cortical Visual Neuroprosthesis for the Blind - CORTIVIS.
http://cortivis.umh.es.
[2] Pedro F. Z. Tomas, Bio-Inspired Processing Module for the Development of an Arti-
ficial Retina. Lisbon, Instituto Superior Tecnico, 2003.
[3] Justin Keat, Pamela Reinagel, R. Clay Reid and Markus Meister, ”Population coding
of motion patterns in the early visual system”, vol. 30. Springer-Verlag, 2001.
[4] Justin Keat, Pamela Reinagel and R. Clay Reid and Markus Meister, ”Predicting
Every Spike: A Model for the Responses of Visual Neurons”, vol. 187. Cell Press,
2001.
[5] J. C. Martins and Leonel A. Sousa, Performance Comparison of Bio-inspired Com-
putational Retina Models. 2005.
[6] Jose A. H. Germano and Ricardo M. S. Baptista, Development of a Bio-Inspired
Model with Configurable Implementation. Lisbon, Instituto Superior Tecnico, 2004.
[7] Simon Haykin, Neural Networks: A Comprehensive Foundation. Prentice-Hall, 1999.
[8] Fernando M. Silva, Redes Neuronais e Aprendizagem Automatica - Acetatos . Seccao
de Folhas da Associacao de Estudantes do Instituto Superior Tecnico.
[9] Jonathan D. Victor, and Keith P. Purpura, ”Nature and Precision of Temporal Cod-
ing in Visual Cortex: A Metric-Space Analysis”, vol. 76. New York, The American
Physiologicam Society, 1996.
[10] M. J. Berry, D. K. Warland, and M. Meister, ”The Structure and Precision of Retinal
Spike Trains”, vol. 94. New York, Neurobiology, Proc. Natl. Acad. Sci. USA, 1997.
[11] Human Eye and Artificial Retina Implants.
http://remort.wz.cz/retina/.
55

56 REFERENCES
[12] Visual Pathways.
http://www.cog.brown.edu/courses/cg0001/lectures/visualpaths.html
http://www.ruf.rice.edu/ pomeran/AlumniCollege2004Imagelist.htm.
[13] Richard H. Masland, The Fundamental Plan of the Retina, vol. 4.