product manual - rs components · 3 run digital input to enable controller. connect to 0v to run in...
TRANSCRIPT

506/507/508
Product Manual HA389427 Issue 12
© Copyright 2011 Parker Hannifin Manufacturing Ltd.
All rights strictly reserved. No part of this document may be stored in a retrieval system, or transmitted in any form or by any means to persons not employed by a Parker Hannifin Manufacturing Limited without written permission from Parker Hannifin Manufacturing Ltd . Although every effort has been taken to ensure the accuracy of this document it may be necessary, without notice, to make amendments or correct omissions. Parker Hannifin Manufacturing Limited cannot accept responsibility for damage, injury, or expenses resulting therefrom.
WARRANTY
Refer to Parker Hannifin Manufacturing Limited Terms and Conditions of Sale. These documents are available on request at www.parker.com Parker Hannifin Manufacturing Limited reserves the right to change the content and product specification without notice.

Cont-2
FAILURE OR IMPROPER SELECTION OR IMPROPER USE OF THE PRODUCTS DESCRIBED HEREIN OR RELATED ITEMS CAN CAUSE DEATH, PERSONAL
INJURY AND PROPERTY DAMAGE.
This document and other information from Parker-Hannifin Corporation, its subsidiaries and authorized distributors
provide product or system options for further investigation by users having technical expertise.
The user, through its own analysis and testing, is solely responsible for making the final selection of the system and components and assuring that all performance, endurance,
maintenance, safety and warning requirements of the application are met. The user must analyze all aspects of the application, follow applicable industry standards, and follow the information concerning the product in the current product catalog and in any other materials provided from Parker or its
subsidiaries or authorized distributors.
To the extent that Parker or its subsidiaries or authorized distributors provide component or system options based upon
data or specifications provided by the user, the user is responsible for determining that such data and specifications are suitable and sufficient for all applications and reasonably
foreseeable uses of the components or systems.
Cont-3
Requirements
IMPORTANT: Please read this information BEFORE installing the equipment.
Intended Users This manual is to be made available to all persons who are required to install, configure or service equipment described herein, or any other associated operation. The information given is intended to highlight safety issues, EMC considerations, and to enable the user to obtain maximum benefit from the equipment. Complete the following table for future reference detailing how the unit is to be installed and used.
INSTALLATION DETAILS Model Number (see product label)
Where installed (for your own information)
Unit used as a: (refer to Certification for the Inverter)
♦ Component ♦ Relevant Apparatus
Unit fitted: ♦ Wall-mounted ♦ Enclosure
Application Area The equipment described is intended for industrial motor speed control utilising AC induction or AC synchronous machines.
Personnel Installation, operation and maintenance of the equipment should be carried out by qualified personnel. A qualified person is someone who is technically competent and familiar with all safety information and established safety practices; with the installation process, operation and maintenance of this equipment; and with all the hazards involved.
Product Warnings
Caution Risk of electric
shock
Caution Refer to
documentation
Earth/Ground Protective Conductor Terminal
Safety Information !

Cont-4
Hazards DANGER! - Ignoring the following may result in injury 1. This equipment can endanger life by
exposure to rotating machinery and high voltages.
2. The equipment must be permanently earthed due to the high earth leakage current, and the drive motor must be connected to an appropriate safety earth.
3. Ensure all incoming supplies are isolated before working on the equipment. Be aware that there may be more than one supply connection to the drive.
4. There may still be dangerous voltages present at power terminals (motor output, supply input phases, DC bus and the brake, where fitted) when the motor is at standstill or is stopped.
5. For measurements use only a meter to IEC 61010 (CAT III or higher). Always begin using the highest range. CAT I and CAT II meters must not be used on this product.
6. Allow at least 5 minutes for the drive's capacitors to discharge to safe voltage levels (<50V). Use the specified meter capable of measuring up to 1000V dc & ac rms to confirm that less than 50V is present between all power terminals and earth.
7. Unless otherwise stated, this product must NOT be dismantled. In the event of a fault the drive must be returned. Refer to "Routine Maintenance and Repair".
WARNING! - Ignoring the following may result in injury or damage to equipment
SAFETY Where there is conflict between EMC and Safety requirements, personnel safety
shall always take precedence. • Never perform high voltage resistance
checks on the wiring without first disconnecting the drive from the circuit being tested.
• Whilst ensuring ventilation is sufficient, provide guarding and /or additional safety systems to prevent injury or damage to equipment.
• All control and signal terminals are SELV, i.e. protected by double insulation. Ensure all external wiring is rated for the highest system voltage.
• Thermal sensors contained within the motor must have at least basic insulation.
Safety Information !
Safety Information !

Cont-5
• When replacing a drive in an application and before returning to use, it is essential that all user defined parameters for the product’s operation are correctly installed.
• All exposed metalwork in the Inverter is protected by basic insulation and bonded to a safety earth.
• RCDs are not recommended for use with this product but, where their use is mandatory, only Type B RCDs should be used.
EMC
• In a domestic environment this product may cause radio interference in which case supplementary mitigation measures may be required.
• This equipment contains electrostatic discharge (ESD) sensitive parts. Observe static control precautions when handling, installing and servicing this product.
• This is a product of the restricted sales distribution class according to IEC 61800-3. It is designated as “professional equipment” as defined in EN61000-3-2. Permission of the supply authority shall be obtained before connection to the low voltage supply.
CAUTION!
APPLICATION RISK
• The specifications, processes and circuitry described herein are for guidance only and may need to be adapted to the user’s specific application. We can not guarantee the suitability of the equipment described in this Manual for individual applications.
RISK ASSESSMENT Under fault conditions, power loss or unintended operating conditions, the drive may not operate as intended. In particular: • Stored energy might not discharge to
safe levels as quickly as suggested, and can still be present even though the drive appears to be switched off
• The motor's direction of rotation might not be controlled
• The motor speed might not be controlled
• The motor might be energised A drive is a component within a drive system that may influence its operation or effects under a fault condition. Consideration must be given to: • Stored energy • Supply disconnects • Sequencing logic • Unintended
operation
Safety Information !

Contents
Contents Page
Cont-6
CHAPTER 1 PRODUCT OVERVIEW 1-1 Description....................................................................................................1-1
Product Range .............................................................................................. 1-1
CHAPTER 2 OVERVIEW OF THE 506/507/508 2-1 CHAPTER 3 TERMINAL DESCRIPTION 3-1
Control Terminals ...................................................................................................3-1 Power Terminals .....................................................................................................3-2 Auxiliary Terminals ..................................................................................................3-2 Switches..................................................................................................................3-3 Potentiometers ........................................................................................................3-3 LEDS ......................................................................................................................3-3
CHAPTER 4 INSTALLING THE 506/507/508 4-1 Installation.................................................................................................... 4-1 Speed Control.........................................................................................................4-1 Current Control ......................................................................................................4-1 Wire Sizes...............................................................................................................4-2 Requirements for UL Compliance ................................................................. 4-3 Motor Overload Protection ......................................................................................4-3 Short Circuit Protection Requirements .......................................................................4-3 Short Circuit Rating .................................................................................................4-3 Operating Ambient Temperature .............................................................................4-3 Field Wiring Temperature Rating..............................................................................4-3 Field Wiring Terminal Markings ...............................................................................4-3 Power Wiring Terminals...........................................................................................4-3 Block Diagram.............................................................................................. 4-4 Terminal Tightening Torque.....................................................................................4-6 Field Grounding Terminals ......................................................................................4-6 Fitting............................................................................................................ 4-6 Removing the Cover ................................................................................................4-7 Filter.............................................................................................................. 4-8
EMC Connections...........................................................................................4-9
Installation and Set-Up ................................................................................ 4-9 Warning .................................................................................................................4-9 Switch Selection.......................................................................................................4-9 Potentiometer........................................................................................................4-10 Motor ...................................................................................................................4-10 Wiring ..................................................................................................................4-10 Applying Power .......................................................................................... 4-10
Contents
Contents Page
Cont-7
Fault Finding............................................................................................... 4-12
CHAPTER 5 ROUTINE MAINTENANCE AND REPAIR 5-1 Routine Maintenance.................................................................................... 5-1
Repair ...........................................................................................................5-1 Returning the Unit to Parker SSD Drives....................................................................5-1
CHAPTER 6 EMC CERTIFICATION FOR THE 506/507/508 6-1 Certificates .............................................................................................................6-1
CHAPTER 7 TECHNICAL SPECIFICATIONS 7-1 Input Supply...........................................................................................................7-1 Speed Control.........................................................................................................7-1 Current (Torque) Control .........................................................................................7-1 Adjustment Range ...................................................................................................7-2 Environmental Requirements....................................................................................7-2 EMC Technical Ratings ............................................................................................7-3 Electrical Ratings ......................................................................................... 7-4 Output Ratings with typical armature voltage, Va, 80/90V (160/180V) ......................7-4 Adjustment Ranges..................................................................................................7-4 Product Code..........................................................................................................7-5
1-1 Overview of the 506/507/508
506/507/508 - HA389427
Chapter 1 PRODUCT OVERVIEW Description
The 506/507/508 series controllers are compact, non-isolated motor speed controllers specifically designed for dc shunt would and permanent magnet motors. The controllers are intended to operate from a single phase AC mains supply in the ranges 110/120V AC or 220/240V AC 50/60Hz. The controllers are intended to be mounted on a length of DIN rail in an enclosure. Control of the associated DC motor is achieved by using a linear closed loop feedback signal based on the motor's own DC armature voltage. This enables constant motor speed to be maintained throughout variable motor loads. Improved speed measurement can be obtained by using a tacho-generator, connected to the motor's shaft, to provide the feedback signal. A current loop within the speed feedback path ensures that safe current levels are always provided to the armature of the motor up to the level set by the maximum current potentiometer (Imax). This adjustment is linear and switchable to a lower range of half the controller current. If the controlled motor is stalled (e.g. due to either a faulty field circuit or an excessive load), then a stall timer will remove current from the motor after approximately 15 seconds. Severe armature current overloads, are protected against by an instantaneous over-current trip. The controllers may also be used in a linear motor torque mode by using an adjustable setpoint. In this mode of operation over-speed limiting is a standard feature.
Product Range Product Rating Adjustment Switched Standard 506 3A DC Full Load Current 0.5 to 3A 0.25 to 1.5A 507 6A DC Full Load Current 1 to 6A 0.5 to 3A 508 12A DC Full Load Current 2 to 12A 1 to 6A
Overview of the 506/507/508 2-1
506/507/508 - HA389427
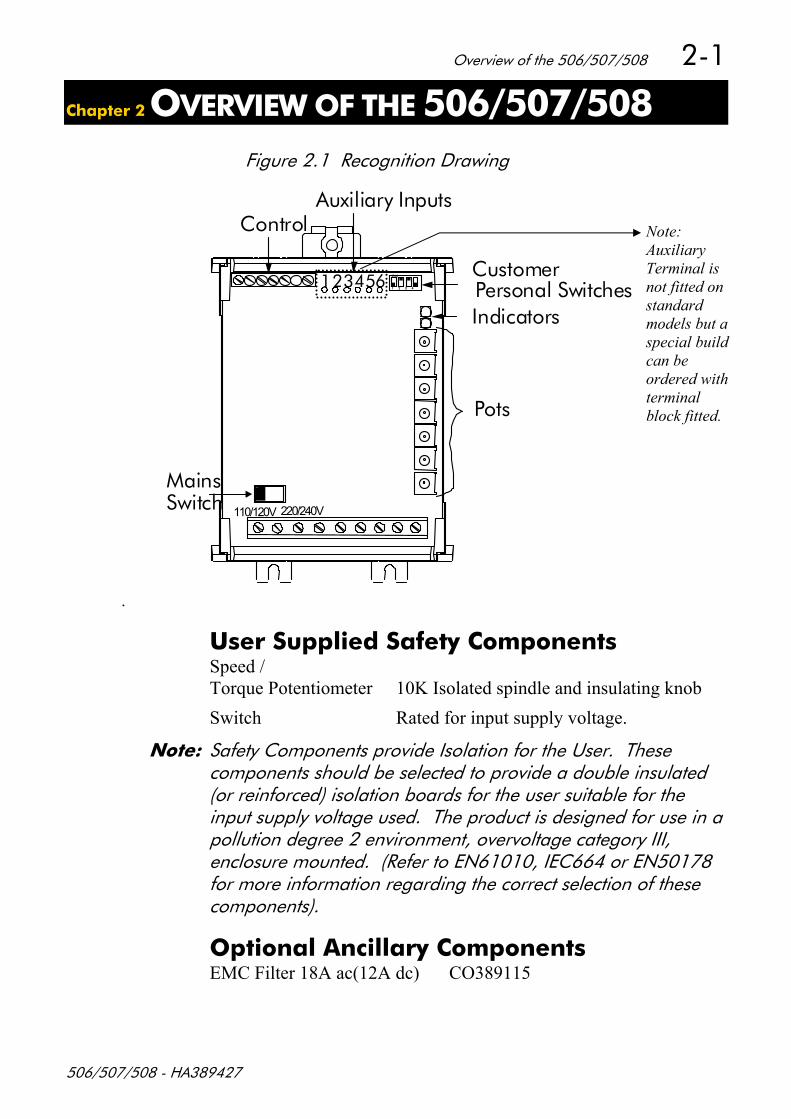
Chapter 2 OVERVIEW OF THE 506/507/508 Figure 2.1 Recognition Drawing
ON 1 2 3 4
Auxiliary Inputs
Customer Personal Switches Indicators
Control
5 6
Pots
Mains Switch 220/240V 110/120V
1 2 3 4
.
User Supplied Safety Components Speed / Torque Potentiometer 10K Isolated spindle and insulating knob Switch Rated for input supply voltage.
Note: Safety Components provide Isolation for the User. These components should be selected to provide a double insulated (or reinforced) isolation boards for the user suitable for the input supply voltage used. The product is designed for use in a pollution degree 2 environment, overvoltage category III, enclosure mounted. (Refer to EN61010, IEC664 or EN50178 for more information regarding the correct selection of these components).
Optional Ancillary Components EMC Filter 18A ac(12A dc) CO389115
Note: Auxiliary Terminal is not fitted on standard models but a special build can be ordered with terminal block fitted.
3-1 Terminal Description
506/507/508 - HA389427
Chapter 3 TERMINAL DESCRIPTION
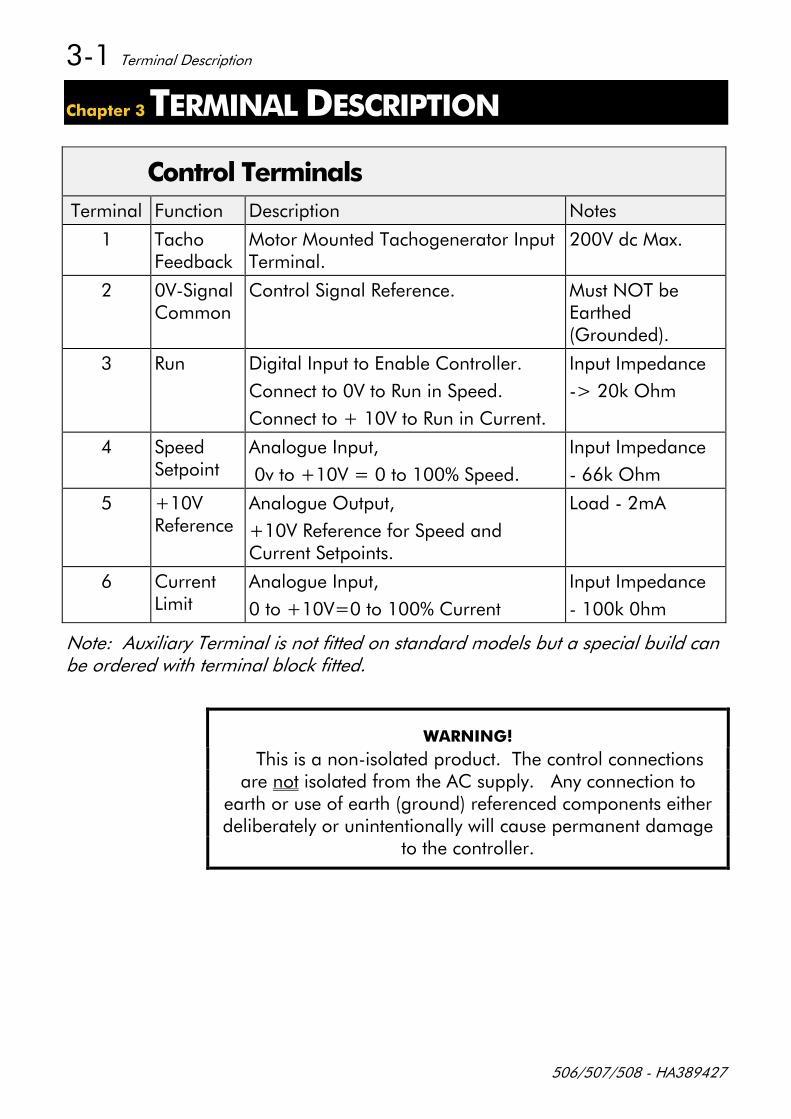
Control Terminals Terminal Function Description Notes
1 Tacho Feedback
Motor Mounted Tachogenerator Input Terminal.
200V dc Max.
2 0V-Signal Common
Control Signal Reference. Must NOT be Earthed (Grounded).
3 Run Digital Input to Enable Controller. Connect to 0V to Run in Speed. Connect to + 10V to Run in Current.
Input Impedance -> 20k Ohm
4 Speed Setpoint
Analogue Input, 0v to +10V = 0 to 100% Speed.
Input Impedance - 66k Ohm
5 +10V Reference
Analogue Output, +10V Reference for Speed and Current Setpoints.
Load - 2mA
6 Current Limit
Analogue Input, 0 to +10V=0 to 100% Current
Input Impedance - 100k 0hm
Note: Auxiliary Terminal is not fitted on standard models but a special build can be ordered with terminal block fitted.
WARNING! This is a non-isolated product. The control connections are not isolated from the AC supply. Any connection to
earth or use of earth (ground) referenced components either deliberately or unintentionally will cause permanent damage
to the controller.
Terminal Description 3-2
506/507/508 - HA389427
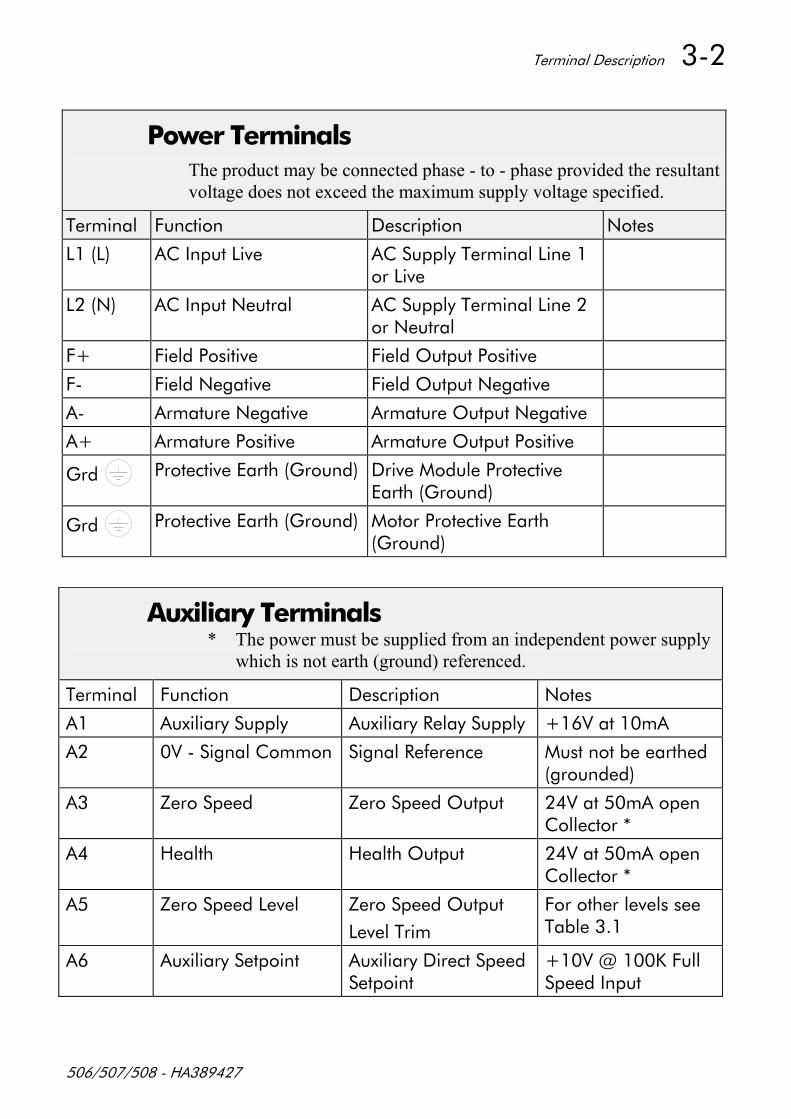
Power Terminals The product may be connected phase - to - phase provided the resultant voltage does not exceed the maximum supply voltage specified.
Terminal Function Description Notes
L1 (L) AC Input Live AC Supply Terminal Line 1 or Live
L2 (N) AC Input Neutral AC Supply Terminal Line 2 or Neutral
F+ Field Positive Field Output Positive
F- Field Negative Field Output Negative
A- Armature Negative Armature Output Negative
A+ Armature Positive Armature Output Positive
Grd Protective Earth (Ground) Drive Module Protective Earth (Ground)
Grd Protective Earth (Ground) Motor Protective Earth (Ground)
Auxiliary Terminals * The power must be supplied from an independent power supply
which is not earth (ground) referenced.
Terminal Function Description Notes
A1 Auxiliary Supply Auxiliary Relay Supply +16V at 10mA
A2 0V - Signal Common Signal Reference Must not be earthed (grounded)
A3 Zero Speed Zero Speed Output 24V at 50mA open Collector *
A4 Health Health Output 24V at 50mA open Collector *
A5 Zero Speed Level Zero Speed Output Level Trim
For other levels see Table 3.1
A6 Auxiliary Setpoint Auxiliary Direct Speed Setpoint
+10V @ 100K Full Speed Input
3-3 Terminal Description
506/507/508 - HA389427
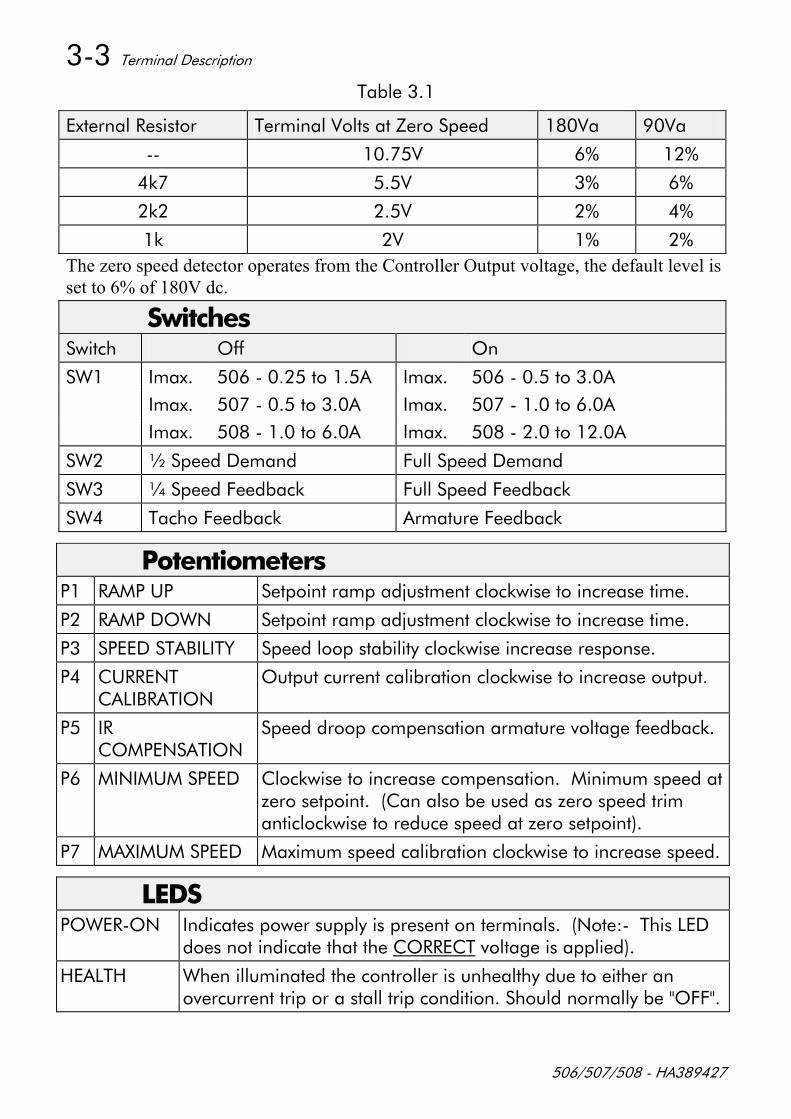
Table 3.1
External Resistor Terminal Volts at Zero Speed 180Va 90Va
-- 10.75V 6% 12%
4k7 5.5V 3% 6%
2k2 2.5V 2% 4%
1k 2V 1% 2% The zero speed detector operates from the Controller Output voltage, the default level is set to 6% of 180V dc.
Switches Switch Off On
SW1 Imax. 506 - 0.25 to 1.5A Imax. 506 - 0.5 to 3.0A Imax. 507 - 0.5 to 3.0A Imax. 507 - 1.0 to 6.0A Imax. 508 - 1.0 to 6.0A Imax. 508 - 2.0 to 12.0A
SW2 ½ Speed Demand Full Speed Demand
SW3 ¼ Speed Feedback Full Speed Feedback
SW4 Tacho Feedback Armature Feedback
Potentiometers P1 RAMP UP Setpoint ramp adjustment clockwise to increase time.
P2 RAMP DOWN Setpoint ramp adjustment clockwise to increase time.
P3 SPEED STABILITY Speed loop stability clockwise increase response.
P4 CURRENT CALIBRATION
Output current calibration clockwise to increase output.
P5 IR COMPENSATION
Speed droop compensation armature voltage feedback.
P6 MINIMUM SPEED Clockwise to increase compensation. Minimum speed at zero setpoint. (Can also be used as zero speed trim anticlockwise to reduce speed at zero setpoint).
P7 MAXIMUM SPEED Maximum speed calibration clockwise to increase speed.
LEDS POWER-ON Indicates power supply is present on terminals. (Note:- This LED
does not indicate that the CORRECT voltage is applied).
HEALTH When illuminated the controller is unhealthy due to either an overcurrent trip or a stall trip condition. Should normally be "OFF".

Installing the 506/507/508 4-1
506/507/508 - HA389427
Chapter 4 INSTALLING THE 506/507/508 Installation
Speed Control Figure 4.1 Wiring Diagram Speed Control
MAINSFILTER
L1L2/N
GRD
Fuse
6
5
43
2
1
10K
I LIMIT+ 10 V
SETPOINTRUN
COMMON
TACHO GENERATOR
F +F -A -
A +GRD
FF
F
A
AA
T6
Fuse*
RUN
neutralDouble/reinforced insolation
potentiometer and run switchboundary provided by users
* Additional line fuse recommended for applications where live connections are made rather than live and netral.
'Run' connects to Common to 'Enable' Speed Control.
Current Control Figure 4.2 Wiring Diagram Current Control
MAINSFILTER
L1L2/N
GRD
Fuse
6
5
43
2
1
10K
I LIMIT+ 10 V
SETPOINTRUN
COMMON
TACHO GENERATOR
F +F -
A -A +
GRD
FF
F
A
AA
T6
Fuse*
RUN
neutral
10K
SPEED SETPOINT
Double/reinforced insolationboundary provided by userspotentiometers and run switch
• Optional Speed Setpoint potentiometer to limit overspeed, connect
setpoint direct to +10V if not required. * Additional line fuse recommended for applications where live connections are made rather than live and netrual
'Run' connected to +10V to 'Enable' Current Control and 'Override' Stall detection.

4-2 Installing the 506/507/508
506/507/508 - HA389427
WARNING! Ensure that all wiring is electrically isolated and cannot be
made "live" unintentionally by other personnel.
Wire Sizes
* Contains semiconductor fuses as recommended below.
Model Maximum Output Rating
Function Cable (Wire) Size
AC Supply Fuse Rating
Parker Fuse Isolator Kit Part Numbers *
506 3A DC Armature, AC Supply, Ground
1.5mm2/ 16AWG
10A LA054664
507 6A AC Supply, Ground DC Armature
2.5mm2/ 14AWG 1.5mm2/ 16AWG
10A LA054664
508 12A AC Supply DC Armature, Ground
6.0mm2/ 10AWG 4.0mm2/ 12AWG
20A LA050062
Terminal Tightening Torques
Terminal Torque Setting
Power 0.8 Nm 7 lbf-in
Control 0.56 Nm 5 lbf-in
Ferraz Semiconductor Fuses Fuse Rating Ferraz Type No. Parker Part No.
10A, 250V 250VFA10A6X32 CH230014 20A, 250V 250VFA20A6X32 CH230024

Installing the 506/507/508 4-3
506/507/508 - HA389427
Requirements for UL Compliance For installations requiring compliance with UL Standards.
Motor Overload Protection An external motor overload protective device must be provided by the installer. This device can comprise of a thermal sensor within the motor winding monitored by an external relay but this combination cannot be evaluated by UL. Hence, it is the responsibility of the installer/local inspector to determine whether the combination is in compliance with the National Electrical Code or local code requirements.
Short Circuit Protection Requirements UL Recognized semiconductor fuses must be installed upstream of the controllers. Refer to the semiconductor fuses table on the previous page for recommended semiconductor fuse manufacturer and type number.
Short Circuit Rating The 506 and 507 controllers are suitable for use on a circuit capable of delivering not more than 1000 RMS symmetrical amperes, 240V maximum; whilst the 508 controller is suitable for use on a circuit capable of delivering not more than 5000 rms symmetrical amperes, 240V maximum.
Operating Ambient Temperature The maximum operating ambient temperature rating is 40oC.
Field Wiring Temperature Rating Use 75oC copper conductors only.
Field Wiring Terminal Markings For correct field wiring connections that are to be made to each terminal, refer to Chapter 5: “Terminal Description” - Power Terminals and Chapter 3 “Technical Specification” - Control Terminals.
Power Wiring Terminals The power wirint terminals accept a maximum conductor size of No. 10 AWG (5.3mm2).
4-4 Installing the 506/507/508 Installing the 506/507/508 4-5
506/507/508 - HA389427
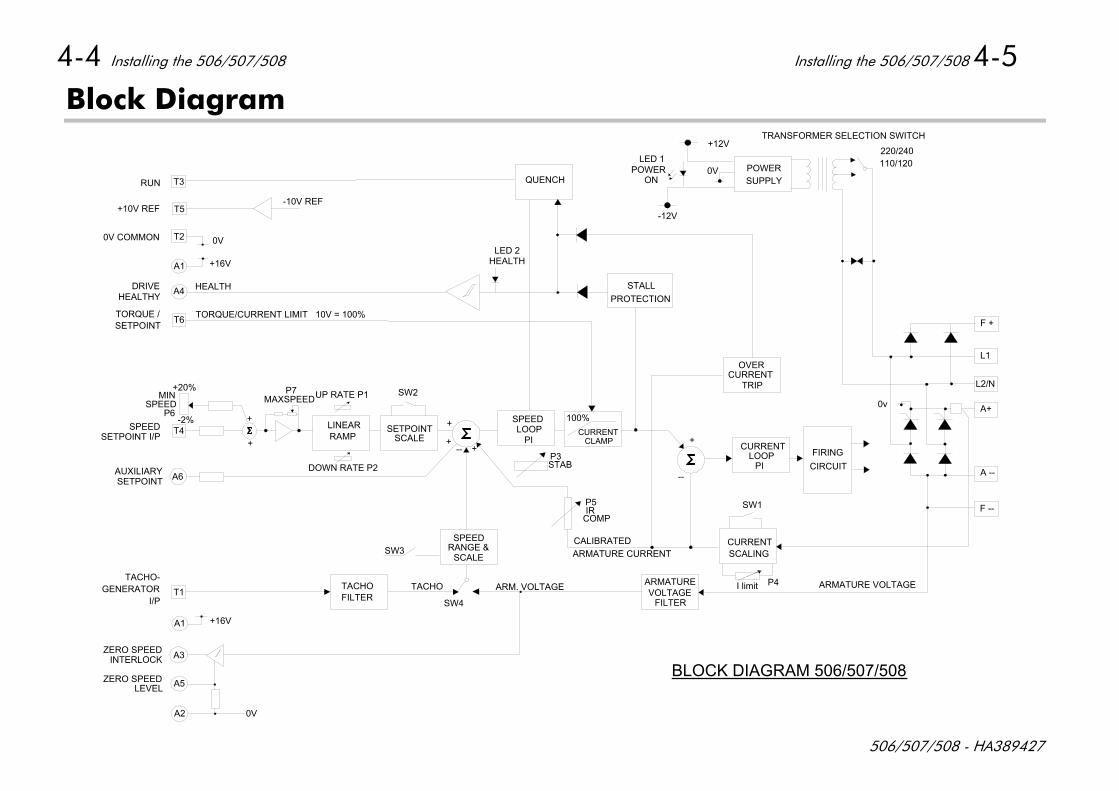
Block Diagram
T3
T5
A4
T4
RUN
+10V REF
0V COMMON
DRIVEHEALTHY
TORQUE /SETPOINT
SPEEDSETPOINT I/P
T1TACHO-
GENERATORI/P
-10V REF
T2 0V
QUENCH
STALLPROTECTION
POWERSUPPLY
F +
L1
L2/N
A+
A --
220/240110/120
+12V
0V
-12V
OVERCURRENT
TRIP
CURRENTLOOP
PIFIRINGCIRCUIT
CURRENTSCALING
--
+
SW1
CALIBRATEDARMATURE CURRENT
SPEEDRANGE &
SCALE
ARM. VOLTAGETACHOFILTER
TACHO
SW3
SW4
ARMATUREVOLTAGE
FILTER
BLOCK DIAGRAM 506/507/508
100%CURRENT
CLAMP
SPEEDLOOP
PI
P3STAB
P5IR
COMP
-- +
LINEARRAMP
UP RATE P1
DOWN RATE P2
+
+
TORQUE/CURRENT LIMIT 10V = 100%
HEALTH
LED 2HEALTH
SETPOINTSCALE
SW2
I limit
0v
+16VA1
+20%
-2%
P7MAXSPEED
A6
+
+
AUXILIARYSETPOINT
MINSPEED
P6
+16VA1
A3ZERO SPEEDINTERLOCK
A5
A2 0V
ZERO SPEEDLEVEL
LED 1POWER
ON
TRANSFORMER SELECTION SWITCH
F --
P4 ARMATURE VOLTAGE
T6

4-6 Installing the 506/507/508
506/507/508 - HA389427
Terminal Tightening Torque Refer to the Terminal Tightening torque table shown on page 4-2 for both the Power and Control Terminals.
Field Grounding Terminals The field grounding terminals are identified with the International Grounding Symbol (IEC Publication 417, Symbol 5019).
Fitting Figure 4.3 Product Mechanical Arrangement
Allow 50mm above and below product for cooling. Allow 8cm access to one side of the unit. Mount the unit with the cover in place.
DIN RAIL MOUNTING
PANEL
Mounting clip can be easilypushed to allow differentmounting configurationsUSE M4 FIXINGS
MOUNTING
F
E
A
C
B
D
Installing the 506/507/508 4-7
506/507/508 - HA389427
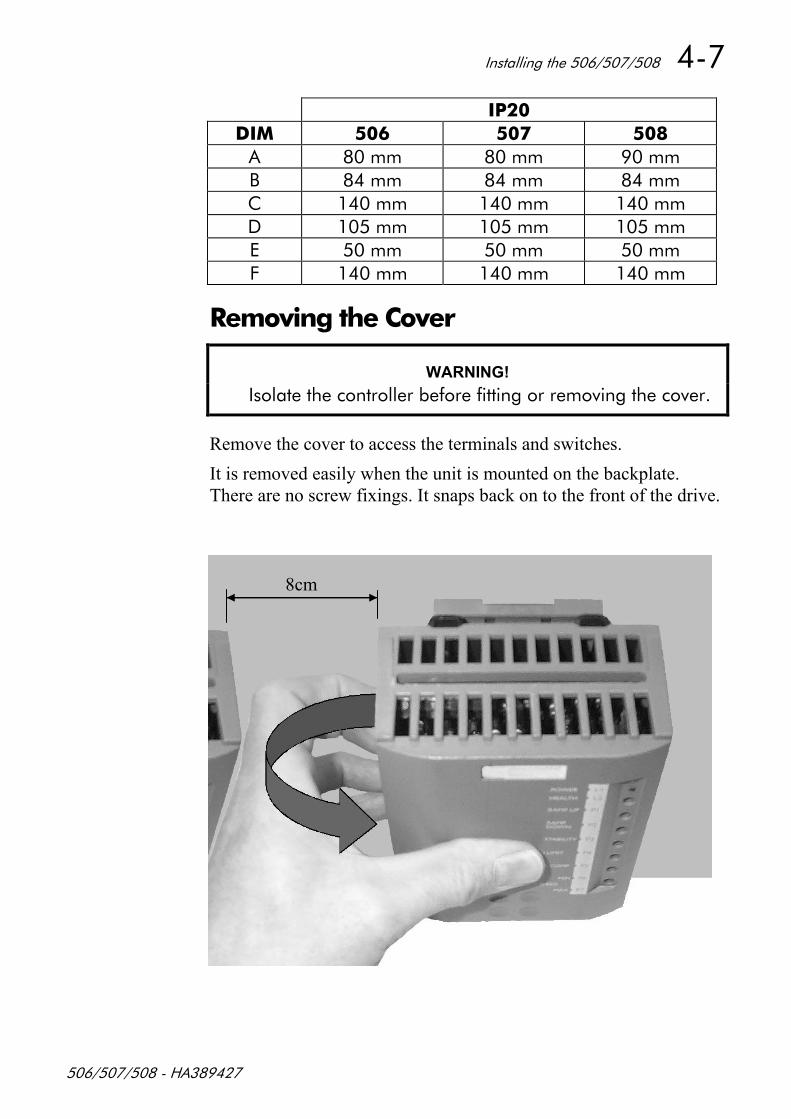
IP20
DIM 506 507 508 A 80 mm 80 mm 90 mm B 84 mm 84 mm 84 mm C 140 mm 140 mm 140 mm D 105 mm 105 mm 105 mm E 50 mm 50 mm 50 mm F 140 mm 140 mm 140 mm
Removing the Cover
WARNING! Isolate the controller before fitting or removing the cover.
Remove the cover to access the terminals and switches. It is removed easily when the unit is mounted on the backplate. There are no screw fixings. It snaps back on to the front of the drive.
8cm
4-8 Installing the 506/507/508
506/507/508 - HA389427
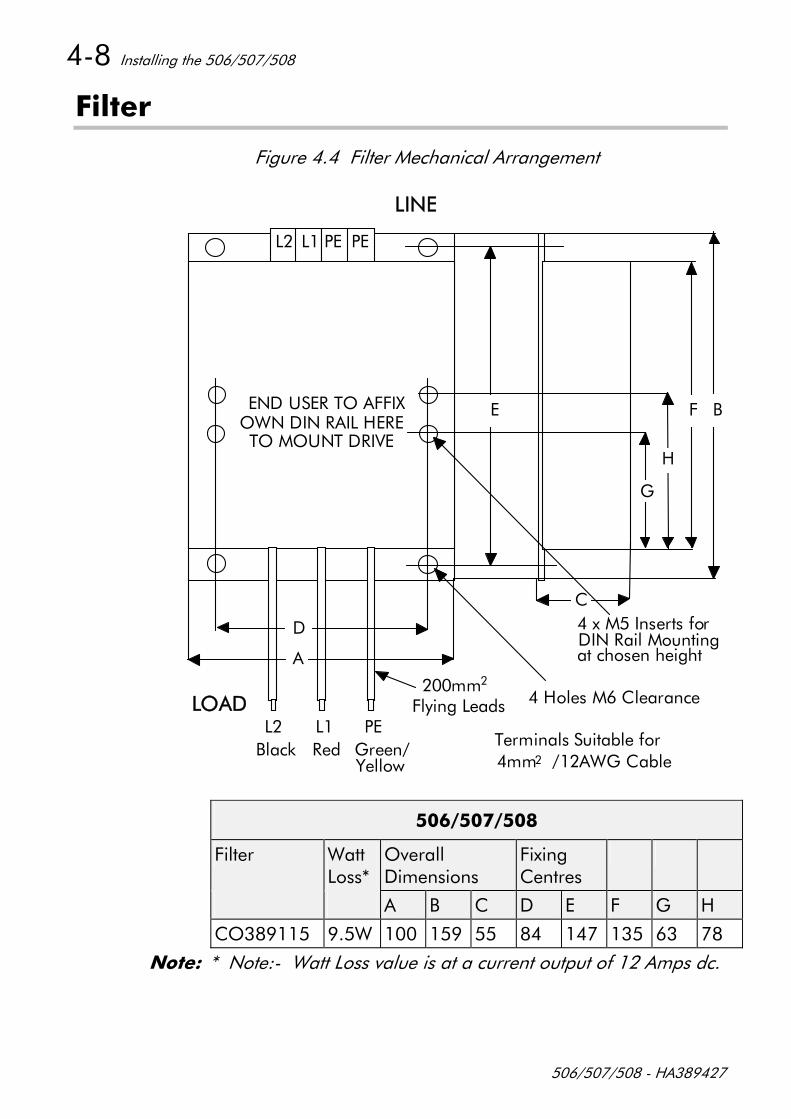
Filter
Figure 4.4 Filter Mechanical Arrangement
PE
L2 L1 PE
L2 PE Green/ Yellow
Black L1 Red
LINE
LOAD 4 Holes M6 Clearance
4mm /12AWG Cable Terminals Suitable for
2
PE
200mm Flying Leads
2
G
F
H
BE
C D
A
4 x M5 Inserts for DIN Rail Mountingat chosen height
END USER TO AFFIX OWN DIN RAIL HERE TO MOUNT DRIVE
506/507/508
Filter Watt Loss*
Overall Dimensions
Fixing Centres
A B C D E F G H
CO389115 9.5W 100 159 55 84 147 135 63 78
Note: * Note:- Watt Loss value is at a current output of 12 Amps dc.

Installing the 506/507/508 4-9
506/507/508 - HA389427
EMC Connections Figure 4.5 Wiring Diagram Mains Filter
Product L1 L2 Grd (PE)
F+ F- A+ A-
Grd (PE)
Grd (PE)
DC MotorScreened Cable
Filter AC Supply
PE
Installation and Set-Up
Warning Before applying power check:-
Switch Selection (a) Mains switch set to intended supply voltage, Left 110/120,
Right 220/240 (b) Personality switches.
SW1 OFF ON
506 0.25 to 3A 0.5 to 3A
507 0.5 to 3A 1 to 6A
508 1 to 6A 2 to 12A Speed Range Maximum Feedback Voltage Range
SW2 SW3 Armature or Tacho
OFF OFF 15 to 30
ON OFF 30 to 60
OFF ON 60 to 120
ON ON 120 to 180 SW4 OFF ON
FEEDBACK TACH ARMATURE

4-10 Installing the 506/507/508
506/507/508 - HA389427
Note: Even when intending to utilise tachogenerator feedback it may be wise to initially run under armature control. Set feedback voltage switches accordingly. Note that if this procedure is followed the tachogenerator must be temporarily disconnected as it will affect operation of the controller.
Potentiometer (a) Product Default P1 Ramp Up Anti-clockwise P2 Ramp Down Anti-clockwise P3 Stability Mid P4 I Limit Anti-clockwise P5 IR Comp Anti-clockwise P6 Min Speed Anti-clockwise P7 Max Speed Mid. (b) External Speed setpoint to minimum.
Motor (a) Check motor is compatible with controller and settings. (b) Check motor and load are free to rotate.
Wiring (a) Check there is no loose wire ends on the PCB. (b) Check that there are no free wire ends on external controls
liable to contact grounded metal or earth (ground) referenced parts.
Applying Power 1. Power on LED 1 should illuminate. 2. Close “RUN” contact and apply a small speed setpoint (5%).
Armature current should now flow, the motor should turn and run at a fixed speed.
If the motor runs above 5% up to top speed Open Run Contact. If the controller is in “Armature” Control then excess speed is due to
incorrect setting of SW2 and 3, the speed scaling.
Installing the 506/507/508 4-11
506/507/508 - HA389427
If the controller is in “Tacho” control then excess speed is due to incorrect polarity of feedback. Alter wiring as follows:-
Problem Action Direction correct but Reverse Tachogenerator polarity only. overspeeding. Direction incorrect and overspeeding. Reverse field polarity only. If motor does not run, increase Ilimit potentiometer P4 as current
may be insufficient for rotation. The Health light LED2 may light in this condition after 15 seconds indicating a Stall, remove and reapply power to reset condition. If the motor is in control but runs in the wrong direction either:- (a) Armature Control - Reverse Field Polarity. (b) Tacho Control - Reverse Field AND Tacho Polarity.
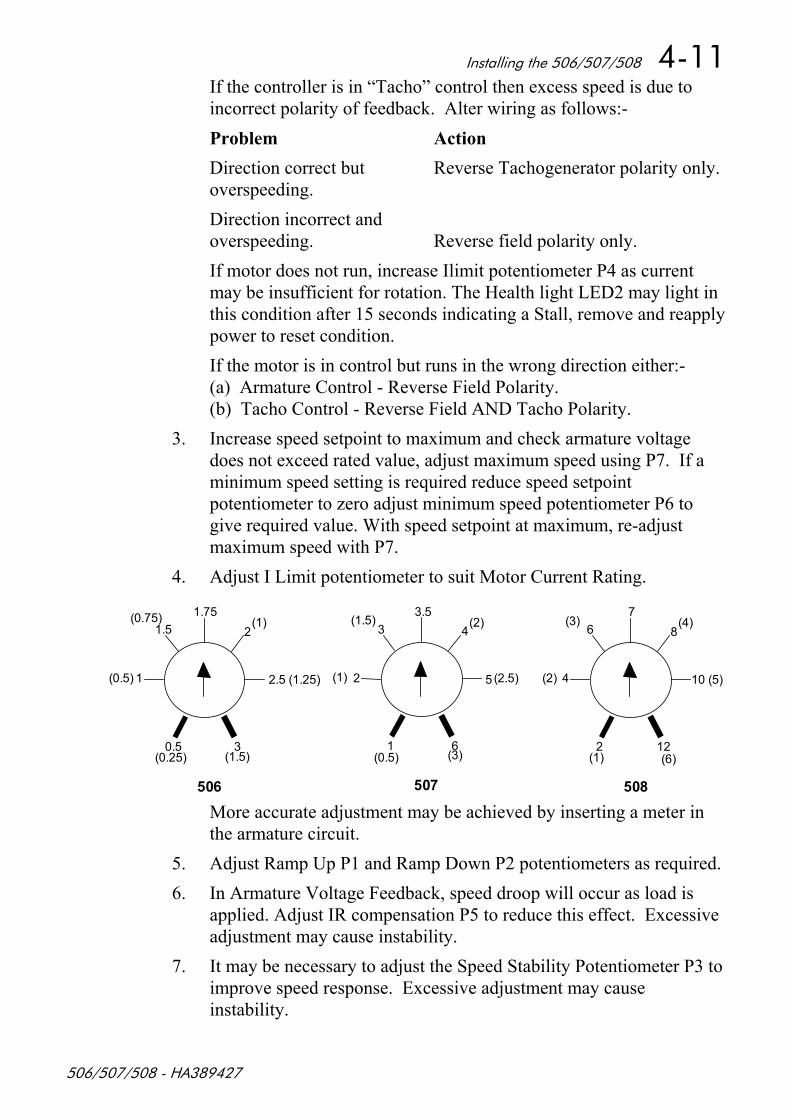
3. Increase speed setpoint to maximum and check armature voltage does not exceed rated value, adjust maximum speed using P7. If a minimum speed setting is required reduce speed setpoint potentiometer to zero adjust minimum speed potentiometer P6 to give required value. With speed setpoint at maximum, re-adjust maximum speed with P7.
4. Adjust I Limit potentiometer to suit Motor Current Rating.
508 506 507
(0.5)
(1)
(1.5) 3
2
1
3.5 4
(2)
5 (2.5)
6 (3) (1)
(2)
(3) 6
4
2
7 8
(4)
10 (5)
12 (6) (0.25)
(0.5)
(0.75) 1.5
1
0.5
2 (1)
2.5 (1.25)
3 (1.5)
1.75
More accurate adjustment may be achieved by inserting a meter in
the armature circuit. 5. Adjust Ramp Up P1 and Ramp Down P2 potentiometers as required. 6. In Armature Voltage Feedback, speed droop will occur as load is
applied. Adjust IR compensation P5 to reduce this effect. Excessive adjustment may cause instability.
7. It may be necessary to adjust the Speed Stability Potentiometer P3 to improve speed response. Excessive adjustment may cause instability.

4-12 Installing the 506/507/508
506/507/508 - HA389427
Fault Finding
Problem Possible Cause Remedy
Controller will not power up - no ‘on’ indication.
Wrong supply voltage. Line fuses blown (if fitted).
Check setting on mains switch. It is likely that if too high a voltage has been used the Controller will be permanently damaged. Power off, check circuits and replace fuses.
Motor will not turn. No run circuit. No setpoint.
Check run contact and wiring. Check connections to and operation of setpoint potentiometer.
Motor accelerates out of control with tacho-generator feedback and small setpoint.
Tacho polarity. Tacho linkage. Tacho faulty.
Power off and reverse tacho connections. Check tacho coupling to motor. Remove and replace tacho.
Motor rotates in the wrong direction. Speed is controlled though.
Motor connections are wrong for required direction with: 1. Armature voltage feedback. 2. Tacho-generator
Power off and reverse armature connections. Power off and reverse both armature and tacho connections.
Motor will not turn and the stall light comes on after 15 seconds in speed control mode.
Motor shaft locked or jammed. No field current (not applicable for permanent magnet motors). No armature current. Low current limit.
Power off and check motor and load for stiffness or jamming. Check that DC voltage across motor field terminals is present. If not power off and check field circuit for continuity. Power off and check armature circuit for continuity. Check current limit with +10V link on Controller.
Motor will only run at full speed.
Maximum speed setpoint.
Check connections to and operation of setpoint potentiometer.
Installing the 506/507/508 4-13
506/507/508 - HA389427
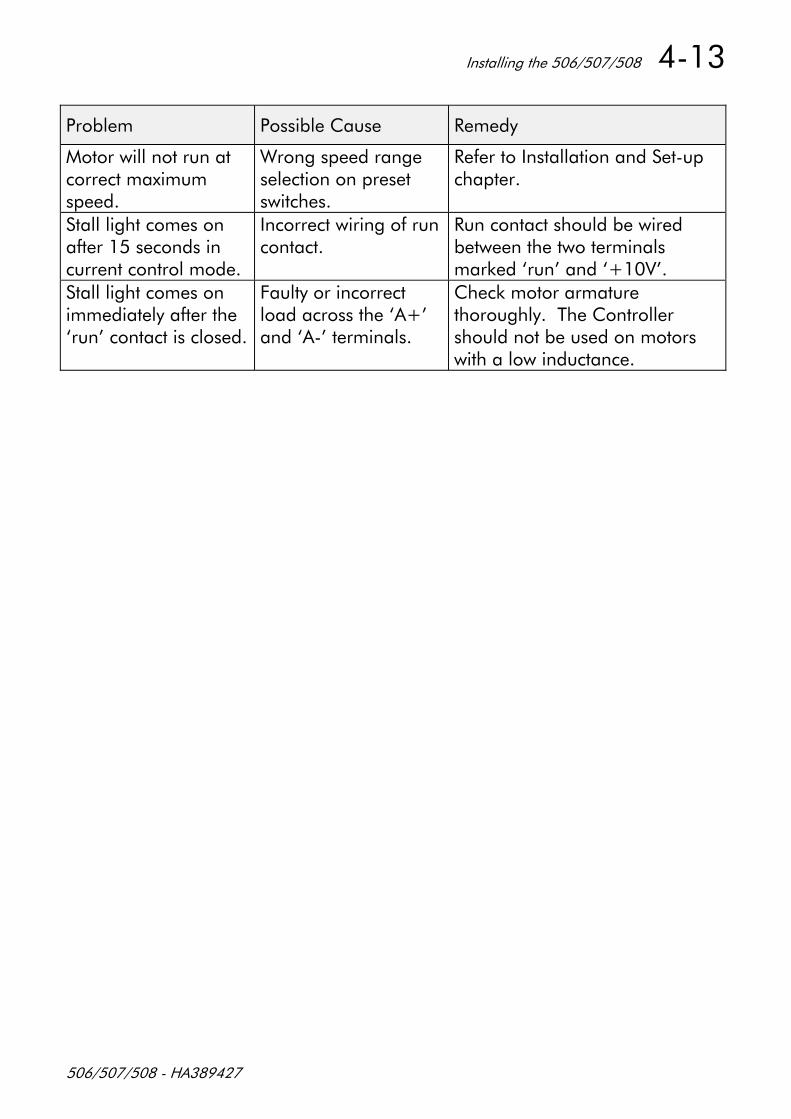
Problem Possible Cause Remedy
Motor will not run at correct maximum speed.
Wrong speed range selection on preset switches.
Refer to Installation and Set-up chapter.
Stall light comes on after 15 seconds in current control mode.
Incorrect wiring of run contact.
Run contact should be wired between the two terminals marked ‘run’ and ‘+10V’.
Stall light comes on immediately after the ‘run’ contact is closed.
Faulty or incorrect load across the ‘A+’ and ‘A-’ terminals.
Check motor armature thoroughly. The Controller should not be used on motors with a low inductance.

5-1 Routine Maintenance & Repair
506/507/508 - HA389427
Chapter 5 ROUTINE MAINTENANCE AND REPAIR Routine Maintenance
Periodically inspect the motor speed controller for build-up of dust or obstructions that may affect ventilation of the unit. Remove this using dry air.
Repair There are no user-serviceable components.
IMPORTANT: MAKE NO ATTEMPT TO REPAIR THE UNIT - RETURN IT TO PARKER SSD DRIVES.
Returning the Unit to Parker SSD Drives Please have the following information available:
• The model and serial number - see the unit’s rating label • Details of the fault Contact your nearest Parker SSD Drives Service Centre to arrange return of the item. You will be given a Returned Material Authorisation. Use this as a reference on all paperwork you return with the faulty item. Pack and despatch the item in the original packing materials; or at least an antistatic enclosure. Do not allow packaging chips to enter the unit.
EMC Certification 6-1
506/507/508 - HA389427
Chapter 6 EMC CERTIFICATION FOR 506/507/508 Certificates
506/507/508
EC DECLARATIONS OF CONFORMITY
Date CE marked first applied: 01.04.2000
EMC Directive
Low Voltage Directive
Issued for compliance with the EMC Directive when the unit is used as relevant apparatus.
In accordance with the EEC Directive
2004/108/EC
We Parker Hannifin Manufacturing Limited, address as below, declare under our sole responsibility that the above Electronic
Products when installed and operated with reference to the instructions in the Product
Manual (provided with each piece of equipment) is in accordance with the relevant
clauses from the following standard:-
* BSEN61800-3 (2004)
In accordance with the EEC Directive
2006/95/EC
We Parker Hannifin Manufacturing Limited, address as below, declare under our sole responsibility that the above Electronic
Products when installed and operated with reference to the instructions in the Product
Manual (provided with each piece of equipment), is in accordance with the relevant clauses from the
following standard :-
EN50178 (1998)
The drive is CE marked in accordance with the low voltage directive for electrical equipment and appliances in the voltage range when installed correctly.
MANUFACTURERS DECLARATIONS
EMC Declaration
Machinery Directive
This is provided to aid your justification for EMC compliance when the unit is used as a component.
We Parker Hannifin Manufacturing Limited, address as below, declare under our sole responsibility that the above Electronic Products when installed and operated with reference to the instructions in the Product
Manual (provided with each piece of equipment) is in accordance with the relevant
clauses from the following standard:-
* BSEN61800-3 (2004)
The above Electronic Products are components to be incorporated into
machinery and may not be operated alone. The complete machinery or installation using this equipment may only be put into service
when the safety considerations of the Directive 2006/42/EC are fully adhered to.
Particular reference should be made to EN60204-1 (Safety of Machinery - Electrical
Equipment of Machines). All instructions, warnings and safety
information of the Product Manual must be adhered to.
Since the potential hazards are mainly electrical rather than mechanical, the drive does not fall under the machinery directive. However, we do supply a manufacturer's declaration for when the drive is used (as a component) in machinery.
Dr Martin Payn (Conformance Officer)
* Compliant with the immunity requirements of the Standard without specified EMC filters.
Parker Hannifin Manufacturing Limited, Automation Group, SSD Drives Europe, New Courtwick Lane, LITTLEHAMPTON, WEST SUSSEX BN17 7RZ TELEPHONE: +44(0)1903 737000 FAX: +44(0)1903 737100 Registered Number: 4806503 England. Registered Office: 55 Maylands Avenue, Hemel Hempstead, Herts HP2 4SJ
7-1 Technical Specifications
506/507/508 - HA389427
Chapter 7 TECHNICAL SPECIFICATIONS
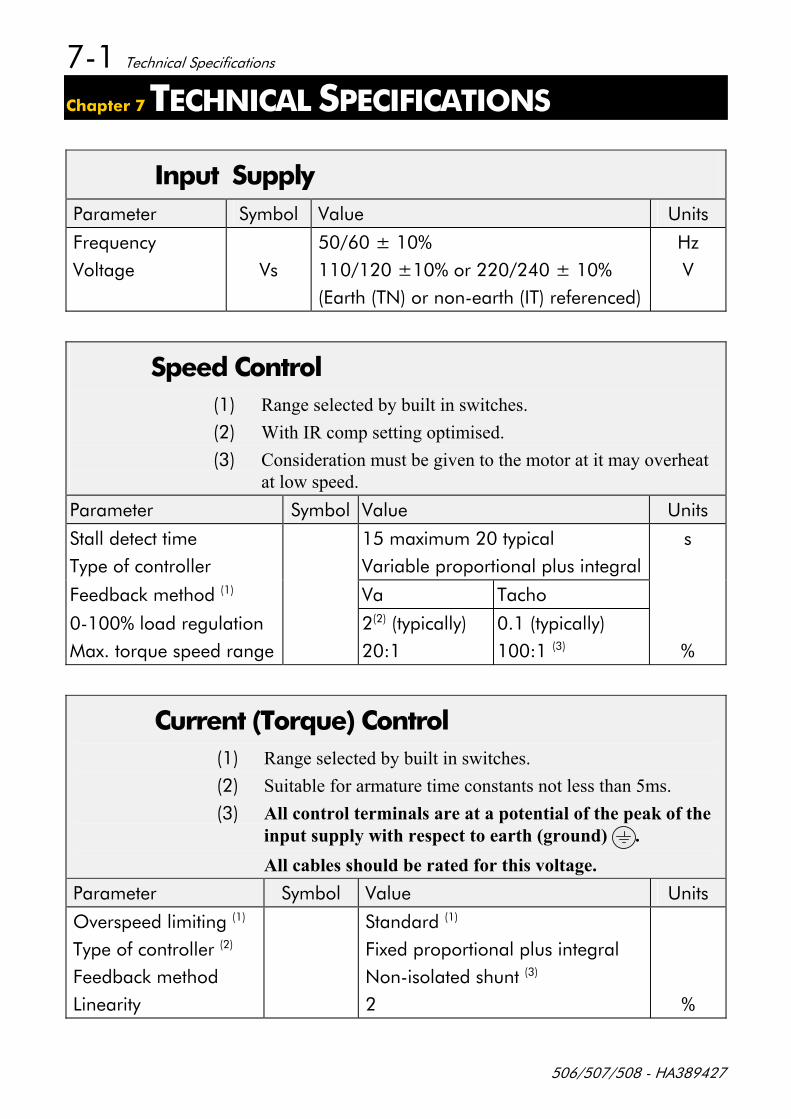
Input Supply Parameter Symbol Value Units
Frequency Voltage
Vs
50/60 ± 10% 110/120 ±10% or 220/240 ± 10% (Earth (TN) or non-earth (IT) referenced)
Hz V
Speed Control (1) Range selected by built in switches. (2) With IR comp setting optimised. (3) Consideration must be given to the motor at it may overheat at low speed.
Parameter Symbol Value Units
Stall detect time Type of controller
15 maximum 20 typical Variable proportional plus integral
s
Feedback method (1) Va Tacho
0-100% load regulation Max. torque speed range
2(2) (typically) 20:1
0.1 (typically) 100:1 (3)
%
Current (Torque) Control (1) Range selected by built in switches. (2) Suitable for armature time constants not less than 5ms. (3) All control terminals are at a potential of the peak of the
input supply with respect to earth (ground) . All cables should be rated for this voltage.
Parameter Symbol Value Units
Overspeed limiting (1) Type of controller (2) Feedback method
Linearity
Standard (1) Fixed proportional plus integral Non-isolated shunt (3) 2
%
Technical Specifications 7-2
506/507/508 - HA389427
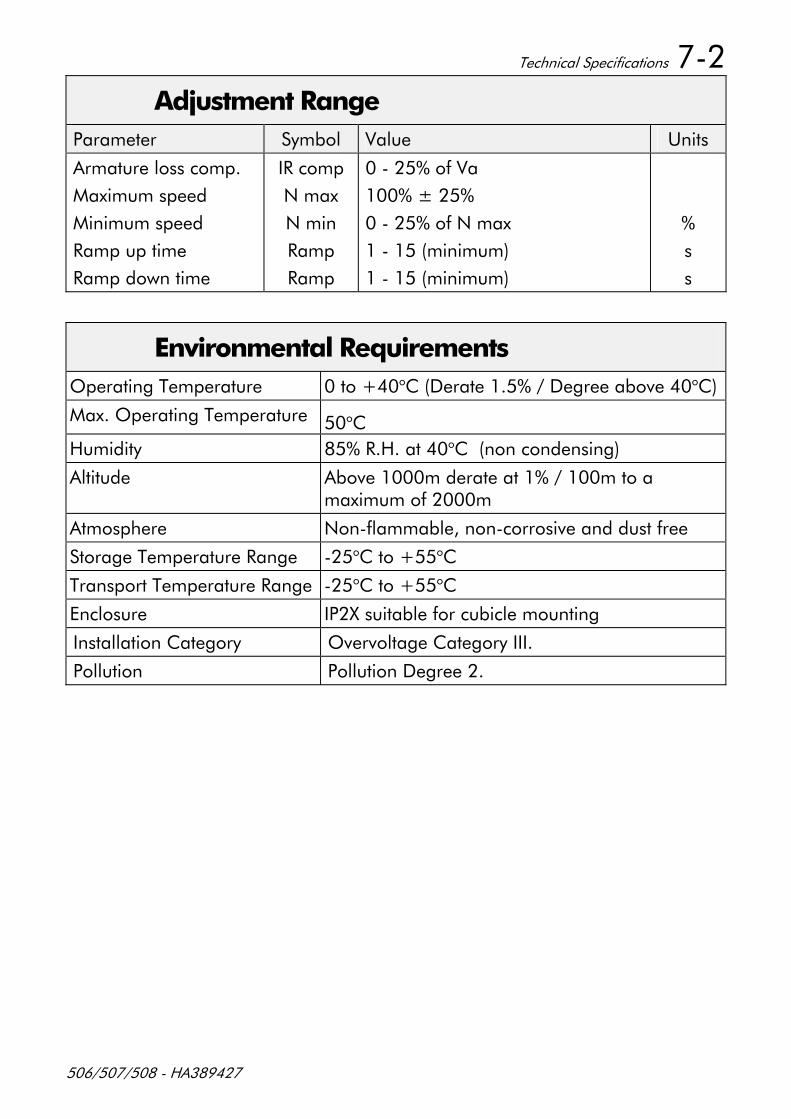
Adjustment Range Parameter Symbol Value Units
Armature loss comp. Maximum speed Minimum speed Ramp up time Ramp down time
IR comp N max N min Ramp Ramp
0 - 25% of Va 100% ± 25% 0 - 25% of N max 1 - 15 (minimum) 1 - 15 (minimum)
% s s
Environmental Requirements Operating Temperature 0 to +40oC (Derate 1.5% / Degree above 40oC)
Max. Operating Temperature 50oC Humidity 85% R.H. at 40oC (non condensing)
Altitude Above 1000m derate at 1% / 100m to a maximum of 2000m
Atmosphere Non-flammable, non-corrosive and dust free
Storage Temperature Range -25oC to +55oC
Transport Temperature Range -25oC to +55oC
Enclosure IP2X suitable for cubicle mounting
Installation Category Overvoltage Category III.
Pollution Pollution Degree 2.
7-3 Technical Specifications
506/507/508 - HA389427
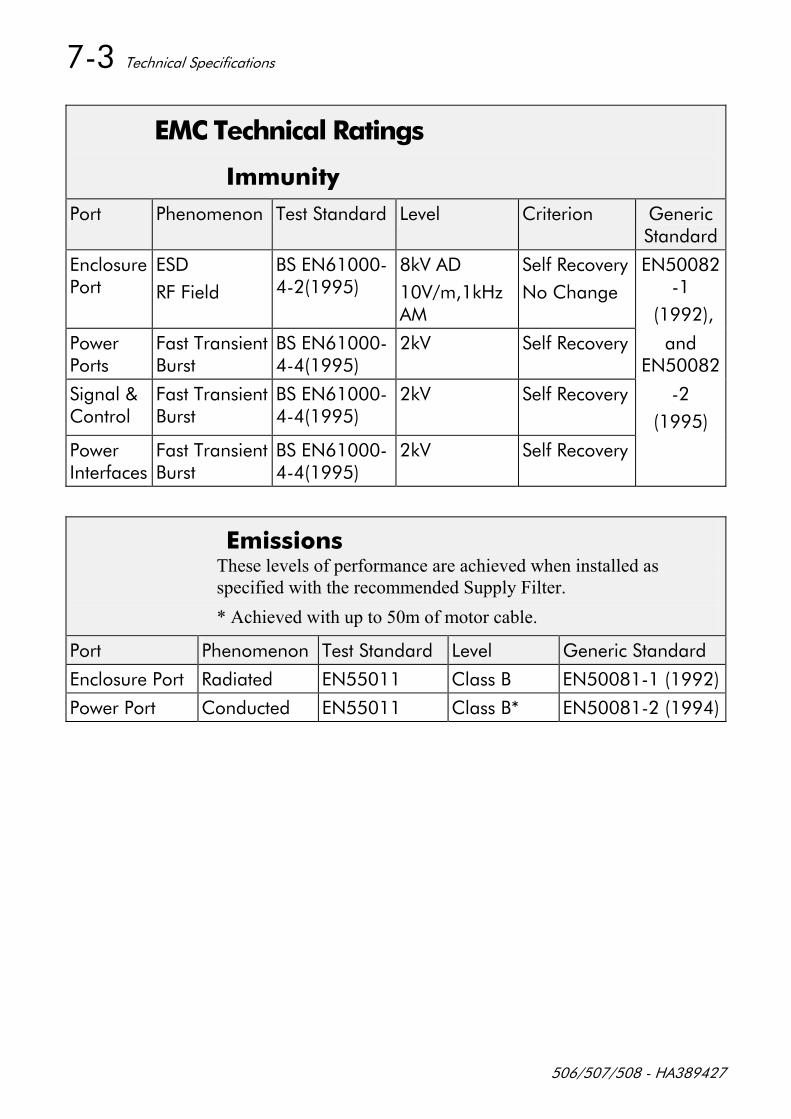
EMC Technical Ratings
Immunity Port Phenomenon Test Standard Level Criterion Generic
Standard
Enclosure Port
ESD RF Field
BS EN61000-4-2(1995)
8kV AD 10V/m,1kHz AM
Self Recovery No Change
EN50082-1
(1992),
Power Ports
Fast Transient Burst
BS EN61000-4-4(1995)
2kV Self Recovery and EN50082
Signal & Control
Fast Transient Burst
BS EN61000-4-4(1995)
2kV Self Recovery -2 (1995)
Power Interfaces
Fast Transient Burst
BS EN61000-4-4(1995)
2kV Self Recovery
Emissions These levels of performance are achieved when installed as specified with the recommended Supply Filter. * Achieved with up to 50m of motor cable.
Port Phenomenon Test Standard Level Generic Standard
Enclosure Port Radiated EN55011 Class B EN50081-1 (1992)
Power Port Conducted EN55011 Class B* EN50081-2 (1994)
Technical Specifications 7-4
506/507/508 - HA389427
Electrical Ratings
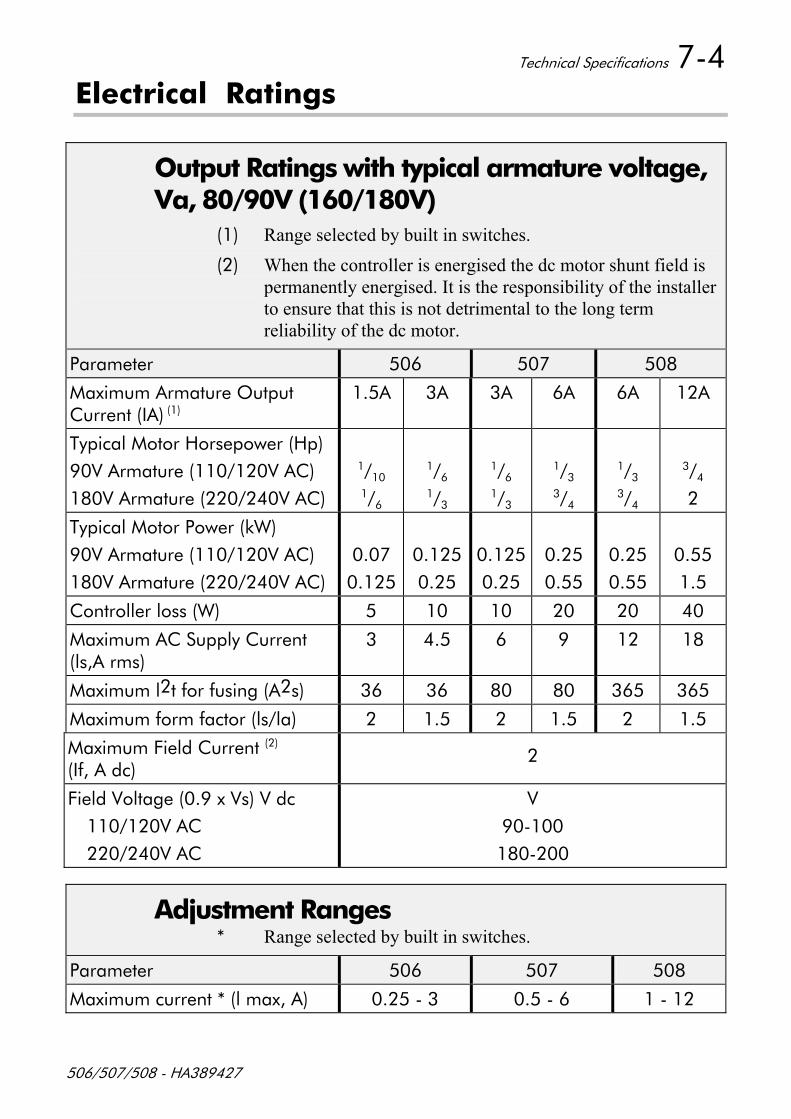
Output Ratings with typical armature voltage, Va, 80/90V (160/180V)
(1) Range selected by built in switches. (2) When the controller is energised the dc motor shunt field is
permanently energised. It is the responsibility of the installer to ensure that this is not detrimental to the long term reliability of the dc motor.
Parameter 506 507 508
Maximum Armature Output Current (IA) (1)
1.5A 3A 3A 6A 6A 12A
Typical Motor Horsepower (Hp) 90V Armature (110/120V AC) 180V Armature (220/240V AC)
1/10 1/6
1/6 1/3
1/6 1/3
1/3 3/4
1/3 3/4
3/4 2
Typical Motor Power (kW) 90V Armature (110/120V AC) 180V Armature (220/240V AC)
0.07
0.125
0.125 0.25
0.125 0.25
0.25 0.55
0.25 0.55
0.55 1.5
Controller loss (W) 5 10 10 20 20 40
Maximum AC Supply Current (ls,A rms)
3 4.5 6 9 12 18
Maximum l2t for fusing (A2s) 36 36 80 80 365 365
Maximum form factor (ls/la) 2 1.5 2 1.5 2 1.5
Maximum Field Current (2) (If, A dc)
2
Field Voltage (0.9 x Vs) V dc 110/120V AC 220/240V AC
V 90-100 180-200
Adjustment Ranges * Range selected by built in switches.
Parameter 506 507 508
Maximum current * (l max, A) 0.25 - 3 0.5 - 6 1 - 12
7-5 Technical Specifications
506/507/508 - HA389427
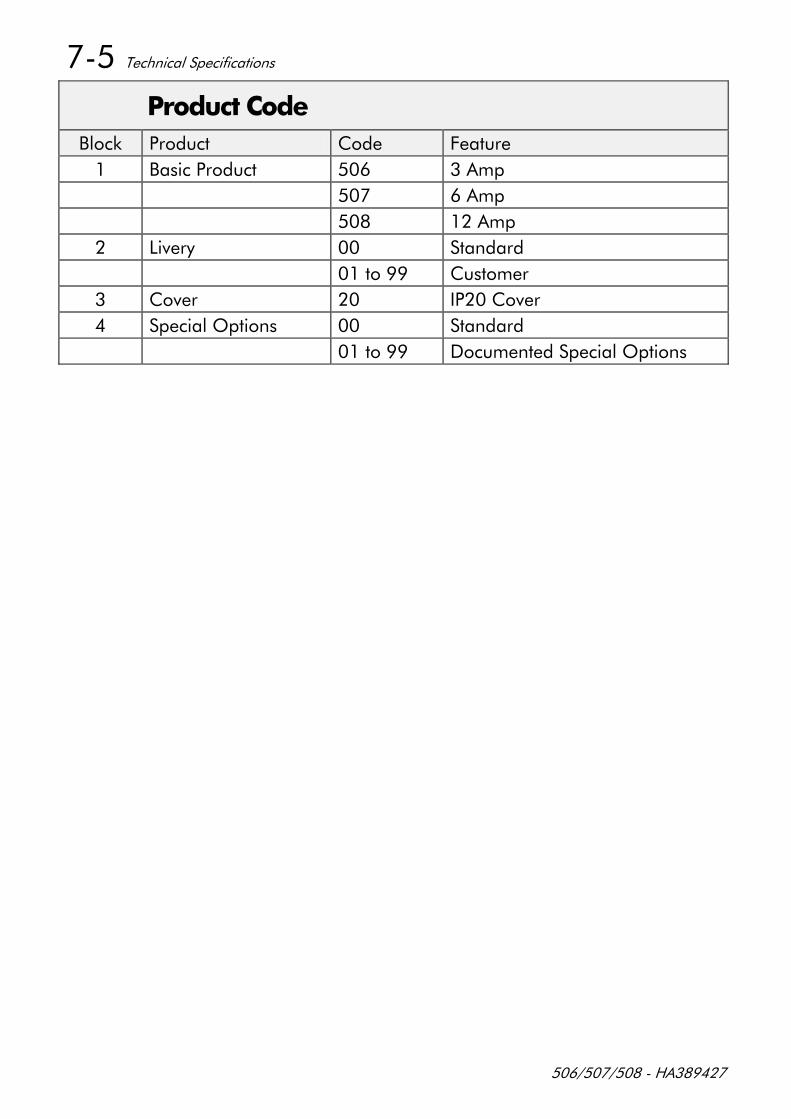
Product Code Block Product Code Feature
1 Basic Product 506 3 Amp 507 6 Amp 508 12 Amp
2 Livery 00 Standard 01 to 99 Customer
3 Cover 20 IP20 Cover 4 Special Options 00 Standard 01 to 99 Documented Special Options