projekt robota kroczącego
TRANSCRIPT
Projekt Robota KroczącegoMariusz Siwiec
Idea Robota Kroczącego
Wzorcami ruchu dla robotów kroczących są zazwyczaj zwierzęta, mówimy wtedy o wzorcach biologicznych – od obserwacji i próby naśladowania chodów zwierząt wszystko się zaczęło. Wzorcami stały się tutaj nogi ludzkie, ssaków, gadów bądź owadów.
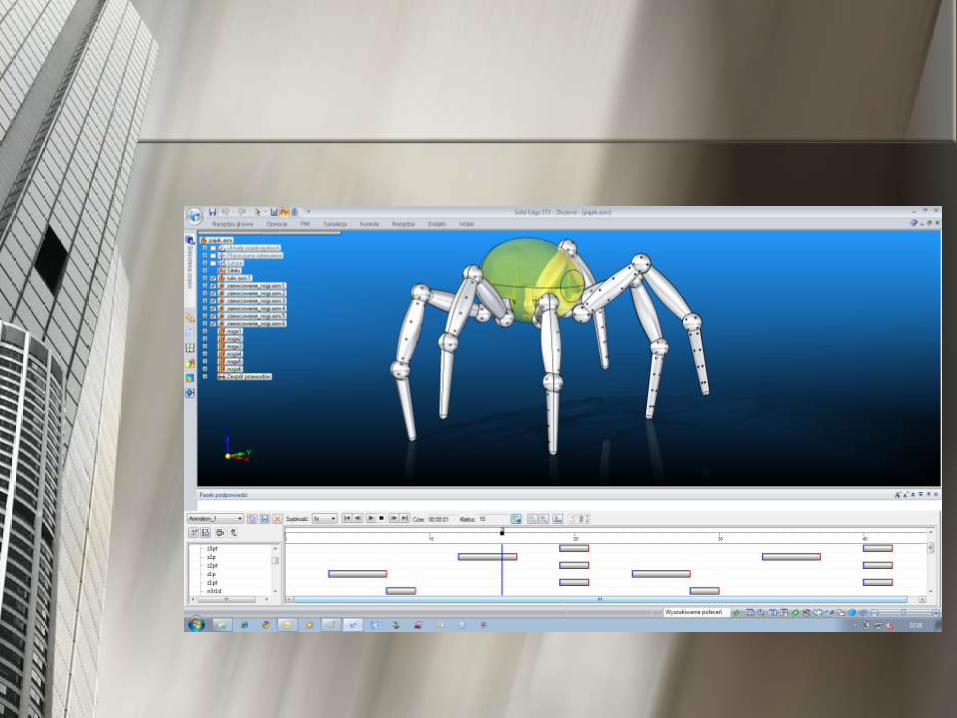
Najczęściej stosowanym ustawieniem nóg są nogi pajęczaków. Zapewnia to dużą stabilność łatwość pokonywania przeszkód, lecz jest najtrudniejsze do zaprogramowania

Prosty robot kroczący

Idea robota
Zgodnie z ideą robota, ma on wykonywać automatycznie pewne zadania. Tutaj skupie się na sercu robota oraz jego elektronice.
Sterowanie:
-element wykonawczy (chodzenie robota):
Dwa silniki Maxon Motor sterujące każdą nogą. Do sterowania sześcioma nogami potrzebne jest 12 silników. Silniki połączone będą w mostek typu H z układem L293D.
Sterowanie silnikami rodzi za sobą problematykę pomiaru prądu oraz rozpoznawania stanów nieustalonych takich jak przeszkoda. Do tego wykorzystany zostanie mikroprocesor ATMega32 oraz programator USB.
Inteligencja układu tkwić ma w komputerze przenośnym połączonym z kamerą. Komputer ma analizować obraz z kamery. Do komputera wgrane będzie oprogramowanie, które w łatwy sposób pozwoli ustalić zadanie: np. przynieś szklankę, poczekaj, zanieś szklankę.
Po ustaleniu zadania komputer ma sterować silnikami DC poprzez port równoległy, a procesor ma rozpoznawać i pokonywać przeszkody. Całość wyposażona zostanie w wyświetlacz LCD 2x16 na którym będzie informacja o postępie zadania, bądź o ewentualnych błędach.
Podsumowanie
Projekt pozwoli na rozwinięcie zainteresowań. Sam robot zaś może być wystawiany na konkursach robotyki. Produkcja seryjna podobnego urządzenia może ułatwić życie np. osobom chorym.

Dziękuje za uwagę