proyecto tesis
TRANSCRIPT
DISEÑO DE TESISTEMA:
‘’DISEÑO Y CONSTRUCCIÓN DE UN VEHICULO DE CARGA GUIADO AUTOMÁTICO AGV (AUTHOMATIC GUIEDED VEHICLE) ’’
PROBLEMÁTICA:
Ante la necesidad de transportar materia prima dentro de fábricas se propone el diseño y la construcción de carros transportadores inteligentes.
- Mover o transportar materiales o componentes de diversos productos a distintos puntos de la fábrica.- Un problema que también se considera es la seguridad.- Tocando temas de oferta y competencia, se destaca la poca cantidad de firmas nacionales que se dedican a proveer soluciones que solventen este tipo de problemas.- Alto costo de implementación de este tipo de sistemas dado que por lo general son empresas extranjeras las que se encargan de estas situaciones.

DISEÑO DE TESISJUSTIFICACIÓN:
Los vehículos AGV son vehículos autónomos capaces de circular por caminos predefinidos de manera automática. Se los diseña para la recogida, transporte y depósito de cargas exclusivamente. El AGV estará predispuesto para seguir un recorrido determinado en función de la frecuencia a la cual esté sintonizado.El conductor empotrado en el suelo viene alimentado con una señal senoidal que oscila a una frecuencia preestablecida, originando un campo magnético que viene detectado y discriminado por el sistema de guía del vehículo. El vehículo podrá funcionar en modo semiautomático y manual.Los sensores con los que se equiparían estos carros inteligentes tendrían como principal objetivo evitar colisiones ya sea entre transportadores o entre obreros y transportadores.

DISEÑO DE TESISDELIMITACIÓN:
Fundamentalmente se transportará diversos materiales, se tomara en cuenta la cantidad de peso, se estima un máximo de 80kg. Las rutas que los transportadores puedan reconocer no incluirán trazos muy pronunciados dado que el concepto de transportador se centra en la seguridad.
Se usarán motores de pasos, dado que el control de estos es sencillo y también ofrecen un torque muy útil para la aplicación, se considera también el empleo de engranajes multiplicadores de torque.
La estructura de los transportadores será de material resistente y ligero. Se empleará un micro controlador, un PLC, el software de interface será Labview con su respectiva tarjeta de adquisición. El software de control no incluirá servicio en red.
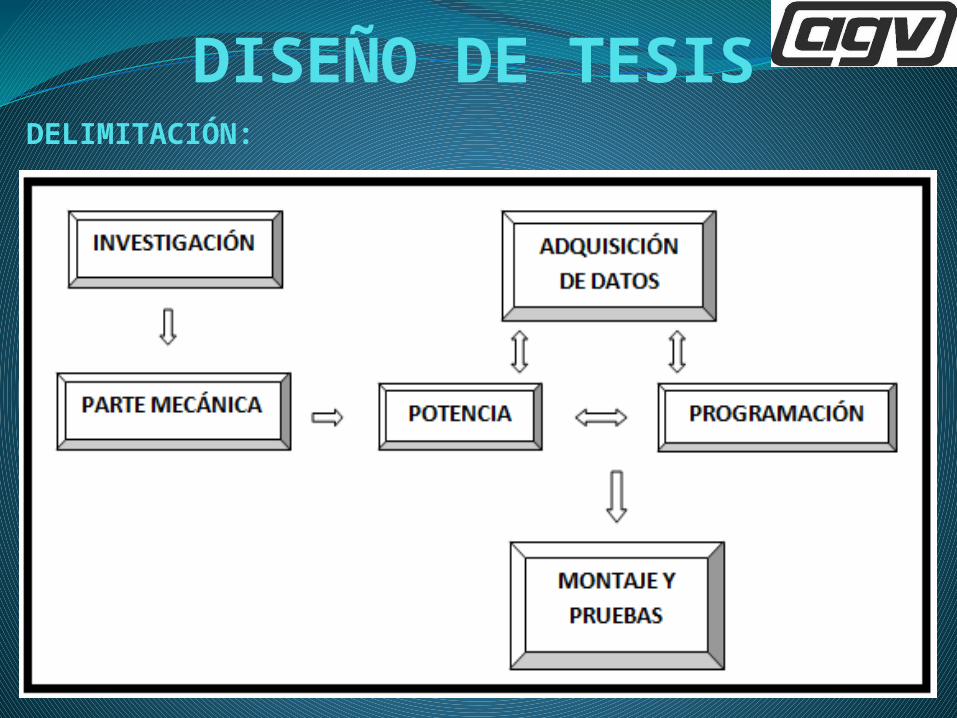
DISEÑO DE TESISDELIMITACIÓN:

DISEÑO DE TESISOBJETIVO GENERAL:
Diseñar y construir un vehículo de carga guiado automáticamente.
- Investigar y recopilar la información necesaria ya sea de fuentes tomadas del internet o de libros de referencia. - Diseñar la estructura del vehículo así como también los acoples para los motores y partes móviles. - Modelar y simular los circuitos electrónicos ya sean de potencia o de lógica digital. - Adquirir datos ya sea para procesarlos o para usarlos como estímulos para los diferentes circuitos que se requiera durante el desarrollo del proyecto. - Programar el interface gráfico así como también el control necesario usando Labview, MPlab y el respectivo software del PLC que se use. - Equipar el vehículo diseñado con los respectivos sensores y dispositivos que permitan el perfecto desempeño del vehículo, así como también se creará un ambiente que permita realizar las diversas pruebas que nos faciliten la identificación de los problemas que puedan afectar al vehículo.
OBJETIVOS ESPECÍFICOS
DISEÑO DE TESISMARCO TEÓRICO:Conceptualización:
- AGV (Authomatic Guided Vehicles / Vehículos de Guiado Automático)- Estructura mecánica del vehículo
[Bastidor del vehículo ,Zona de carga y Sistema de guiado)]
- Filoguiado - Optoguiado - Visión artificial - Guiado Laser
- Labview- PLC- Micro controlador- Tarjeta de adquisición- Sensores de proximidad
[CAPACITIVO, INDUCTIVO, FIN CARRERA, INFRAROJO, ULTRASÓNICO]
Sistemas de guiado existentes:

DISEÑO DE TESIS

DISEÑO DE TESIS
Capítulo 1: INVESTIGACIÓN
Capítulo 2: DISEÑO PARTE MECÁNICA
Capítulo 3: POTENCIA
Capítulo 4: ADQUISICION DE DATOS
Capítulo 5: PROGRAMACIÓN
Capítulo 6: MONTAJE Y PRUEBAS
CONTENIDOS

DISEÑO DE TESISMETODOLOGÍA DE TRABAJO:
La investigación se realizará usando la modalidad Bibliográfica, así como también de campo. Es de vital importancia la recopilación de información ya sea de portales web, revistas especializadas, tesis, monografías o publicaciones anteriores.
Se incluirá la modalidad de campo ya que constituye una parte fundamental el recorrer fábricas y conocer la realidad de la industria con respecto a nuestro proyecto, por otra parte la modalidad experimental estará presente ya que se realizarán una serie de pruebas para determinar el funcionamiento ya sea individual o colectivo de las diferentes etapas del proyecto.
De forma similar se hará uso de las modalidades analítica y sintética dado que se requerirá realizar análisis y también se presentarán resultados. También nos valdremos de entrevistas con preguntas formuladas de tal manera que nos permitan entrar en contacto con las necesidades de los potenciales consumidores de nuestro producto, esto último como técnica de investigación.

DISEÑO DE TESISRECURSOS:Recursos HumanosUna persona será la encargada de realizar el trabajo por completo, claro se requerirá de asesoría de personas capacitadas en las diversas áreas como lo son mecánica industrial, electrónica de potencia, micro controladore, control e instrumentación. Se requerirá de un director de tesis también.
Recursos TécnicosUn computadorPLC y cable de datosMicrocontroladorGrabador de Pic’s.Sensores de proximidadTarjeta de adquisiciónPlaca de pruebas para picMotores (ya sea de pasos o de continua)Software Labview , Mplab, PLCComponentes electrónicos de potencia [transistores ,resistencias, triacs, etc].
Recursos FinancierosSe estima un valor aproximado y de techo de $700.
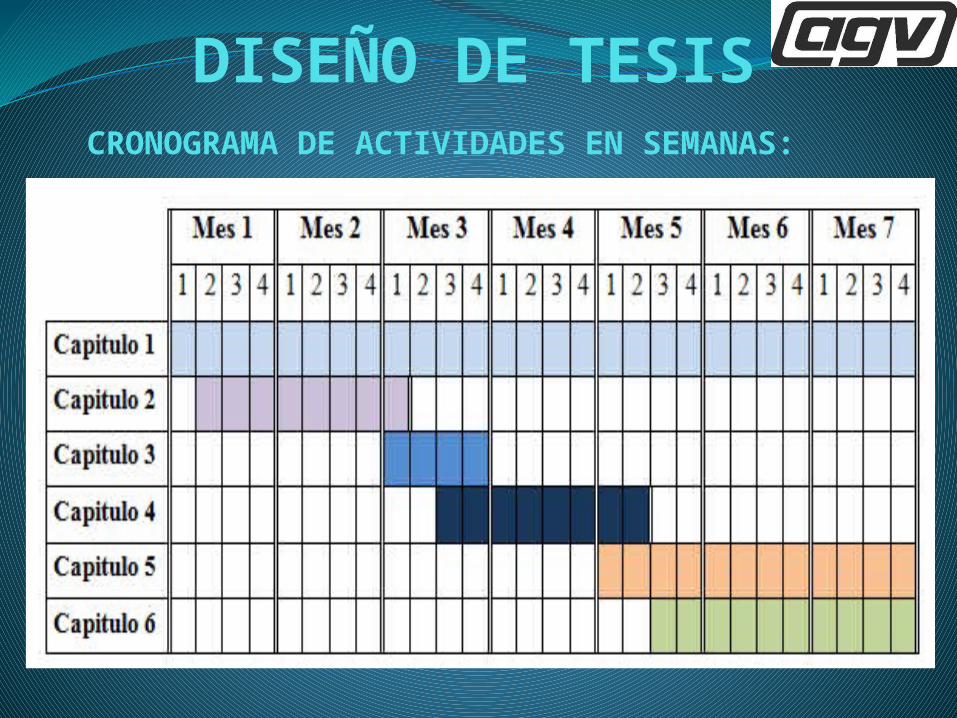
DISEÑO DE TESISCRONOGRAMA DE ACTIVIDADES EN SEMANAS:

DISEÑO DE TESISBIBLIOGRAFÍA:
[1] James L. Fuller. Robotics Introduction, programming and projects, Merrill, New York 1991.
[2] Muhammad H. Rashid, Electrónica de Potencia Circuitos, Dispositivos y Aplicaciones, 2Ed., Naucalpan de Juaréz, Edo. De México, Prentice Hall Inc, 1996.
[3] http://sensoresdeproximidad.galeon.com/
[4] http://www.profesores.frc.utn.edu.ar/industrial/sistemasinteligentes/UT3/agv/Agv.1.html
[5] http://www.mhia.org/industrygroups/agvs/elessons

GRACIAS!