reductor vertical
TRANSCRIPT

UNIVERSITATEA “TRANSILVANIA” DIN BRAŞOV
FACULTATEA DE INGINERIE MECANICĂ
Organe de maşini proiect
Reductor vertical cu o singură treaptă
Student: Trandafirescu SorinSectia: ITAnul de studii: IVGrupa: 1871
ANUL UNIVERSITAR<2010 – 2011>

Cuprins
1. Alegerea motorului electric……………………………………………………………32. Intocmirea schemei stucturale a transmisiei
2.1. Transmisie cu reductorul vertical……………………………………………..42.2. Determinarea momentelor de torsiune si a turatiilor pe fiecare arbore……….5
3. Calculul angrenajului3.1. Predimensionarea angrenajului……………………………………………….5 3.2. Calculul de dimensionare si verificare………………………………………10
4. Schema cinematica a reductorului4.1. Calculul de predimensionare a arborilor……………………………………..134.2. Intocmirea schemei cinematice a reductorului
5. Alegerea abaterilor si tolerantelor tehnologice ale angrenajului si rotii……………...146. Calculul fortelor din angrenaje
6.1. Calculul marimii fortelor.................................................................................166.2. Stabilirea sensului fortelor pe reductorul vertical............................................16
7. Calculul arborilor7.1. Stabilirea schemelor de incarcare cu forte ale arborilor, in cele doua plane,
orizontal si vertical...............................................................................................177.2. Alegerea montajului cu rulmenti pentru arborele de iesire..............................187.3. Stabilirea distantelor dintre punctele de aplicatie ale fortelor exterioare si ale
reactiunilor.......................................................................................................197.4. Verificarea arborelui de iesire la solicitari compuse........................................21
8. Alegerea si verificarea asamblarilor cu pene paralele8.1. Alegerea si verificarea asamblarilor cu pene paralele arborele de iesire.........22
9. Verificarea montajelor cu rulmenti9.1. Verificarea montajului cu rulmenti pentru arborele de iesire...........................23
10. Alegerea si justificarea sistemului de ungere si de etansare.........................................2511. Calculul transmisiei prin lant………………………………………………………....2612. Calculul randamentului transmisiei mecanice………………………………………..3113. Memoriu justificativ cu privire la alegerea materialelor, a semifabricatelor
si a solutiilor constructive pentru principalele piese din componenta reductorului….3114. Norme de tehnica securitatii muncii………………………………………………….32
DESENEa) Desenul de ansamblu al reductorului verticalb) Desenul de execuţie al rotii conduse
2
DATE DE PROECTARE:
Reductor cilindric cu o treapta cu axele in plan vertical
Puterea motorului electric: Pm = 7.5 kw
Turatia motorului electric: n = 1450 rot/min
Raportul de transmitere al transmisiei prin lant: iL = 1.25
Raportul de transmitere al reductorului: ir = 4
Durata de functionare impusa: Lh = 10000 ore
1. ALEGEREA MOTORULUI ELECTRIC:
Din catalogul de motoare “ Electroprecizia “ se alege motor electric asincron tip MA – AL – 132M - 4
cu principalele caracteristici prezentate in figura 1.1, tabelul 1.1 si tabelul 1.2
Tabelul 1.1
D[mm] E[mm] N[mm] L[mm] S[mm]
38 80 230 403 14.5
Tabelul 1.2
Tipul motorului Pm[KW] Turatia nm[rot/min]
MA – AL –132M – 4 7.5 1450
Fig. 1.1
2. INTOCMIREA SCHEMEI STRUCTURALE A TRANSMISIEI3

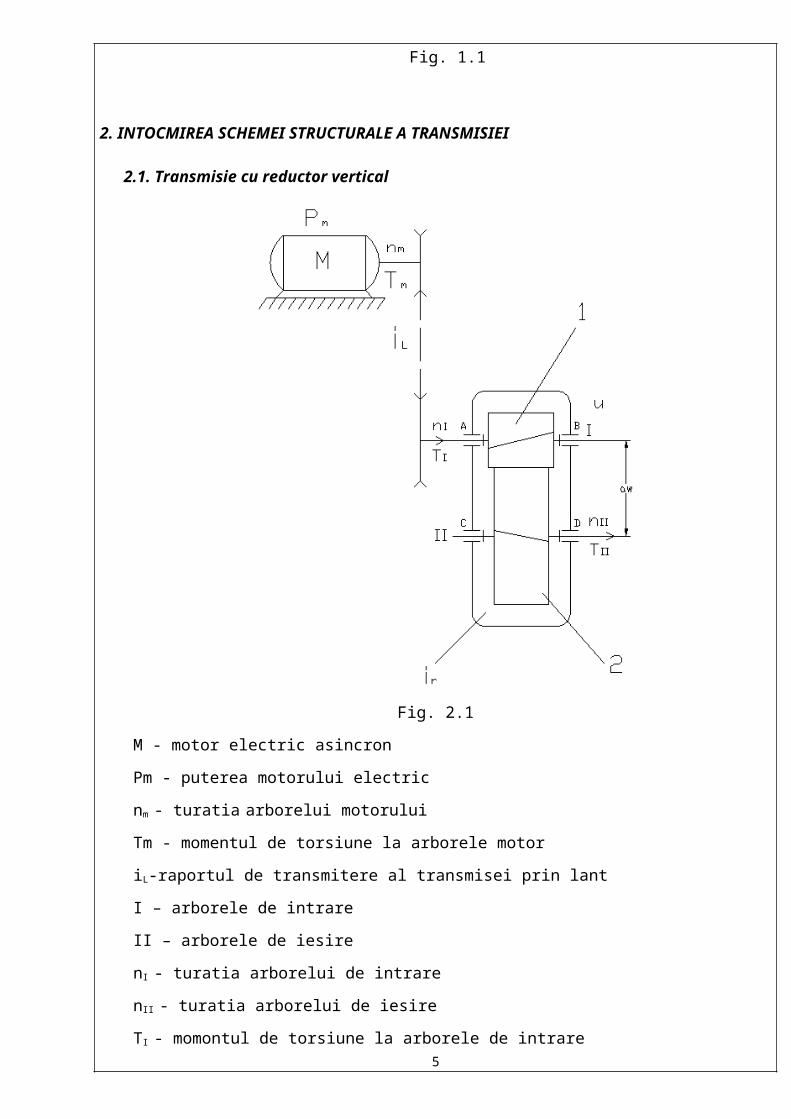
2.1. Transmisie cu reductor vertical
Fig. 2.1
M - motor electric asincron
Pm - puterea motorului electric
nm - turatia arborelui motorului
Tm - momentul de torsiune la arborele motor
iL-raportul de transmitere al transmisei prin lant
I – arborele de intrare
II – arborele de iesire
nI - turatia arborelui de intrare
nII - turatia arborelui de iesire
TI - momontul de torsiune la arborele de intrare
TII - momentul de torsiune la arboreal de iesire
I - pinion
II - roata condusa
u - raport de angernare
A, B, C, D - lagare cu rulmenti
4
2.2. Determinarea momentelor de torsiune si a turatiilor pe fiecare arbore
Arborele motoruluiTuratia:
nm = 1450 rot/min
Momentul de torsiune:
Arborele de intrare al reductorului (I)
Arborele de iesire (II)
3. CALCULUL ANGRENAJULUI3.1. Predimensionarea angrenajului
Tabelul 3.1Nr.Crt. Parametrii Relatii de calcul
0 1 21. DATE DE PROIECTARE1.1. Turaţia pinionului 1.2. Momentul de torsiune la pinion1.3. Raportul de angrenare
1.4. Durata minimă de funcţionare aangrenajului Lh = 10000 ore
1.5. Condiţiile de funcţionare aangrenajului
- Maşina motoare : motor electric asincron- Maşina antrenată : elevator- caracterul sarcini : socuri moderate KA = 1.35
1.6. Ciclurile de solicitare ale dinţilor- solicitare de contact : ciclu pulsator- solicitare de încovoiere : ciclu pulsator
1.7.Numărul de cicluri de solicitare a flancului dintelui la o rotaţie completă pentru pinion respectiv roata condusa
1.8. Profilul cremalierei de referinţăpentru dantura inclinata
020n ; ; ;
2. ALEGEREA OŢELURILOR TRATAMENTELOR APLICATE ŞI A TENSIUNILOR LIMITA
2.1. Alegerea oţelurilor celor două roţi a Materialul: 17CrNi16
5

tratamentelor şi a durităţilor obţinute
Tatament:cementare, calire dubla si revenire joasaDuritate flancului: HRC = 62Duritatea miezului: HB = 350 - 450Limita de curgere: σ02 = 635 MPaLimita de rupere: σr = 880 -1180 MPa
2.2. Tensiunile limită la solicitarea de contact şi la solicitarea de încovoiere
σHlim1,2 = 1500 MPa
σFlim1,2 = 500 MPa3. CALCULUL DE PREDIMENSIONARE
3.1. Numărul de dinţi z1 ai pinionului, respectiv z2 ai roţii conduse
3.2. Raportul real de angrenare
3.3. Factorii pentru calculul la contact
3.3.1. Factorul de elasticitate a materialelor roţilor ZE ;
3.3.2. Factorul zonei de contact ZH
3.3.3. Factorul gradului de acoperire
3.3.4. Factorul înclinării danturii Zβ3.4. Factorii pentru calculul la încovoiere
3.4.1.Numerele de dinţi ai roţilor echivalente
3.4.2.Coeficienţii deplasărilor de profil în plan normal
3.4.3. Factorii de formă a dinţilor
3.4.4. Factorii de corecţie a tensiunii la baza 6

dinţilor
3.4.5. Factorul gradului de acoperire
3.4.6. Factorul înclinării danturii
3.5. Factorii de corecţie a sarcinii3.5.1. Factorul regimului de funcţionare KA KA=1.353.5.2. Factorul dinamic Kν Kν =1.07
3.5.3.
Factorii de repartizare neuniformă a sarcinii pe lăţimea danturii, KHβ pentru solicitarea de contact şi KFβ pentru solicitarea de încovoiere
KHβ =1.5KFβ =1.4
3.5.4.
Factorii de repartizare neuniformă a sarcinii în plan frontal KHα pentru solicitare de contact şi KFα pentru solicitarea de încovoiere
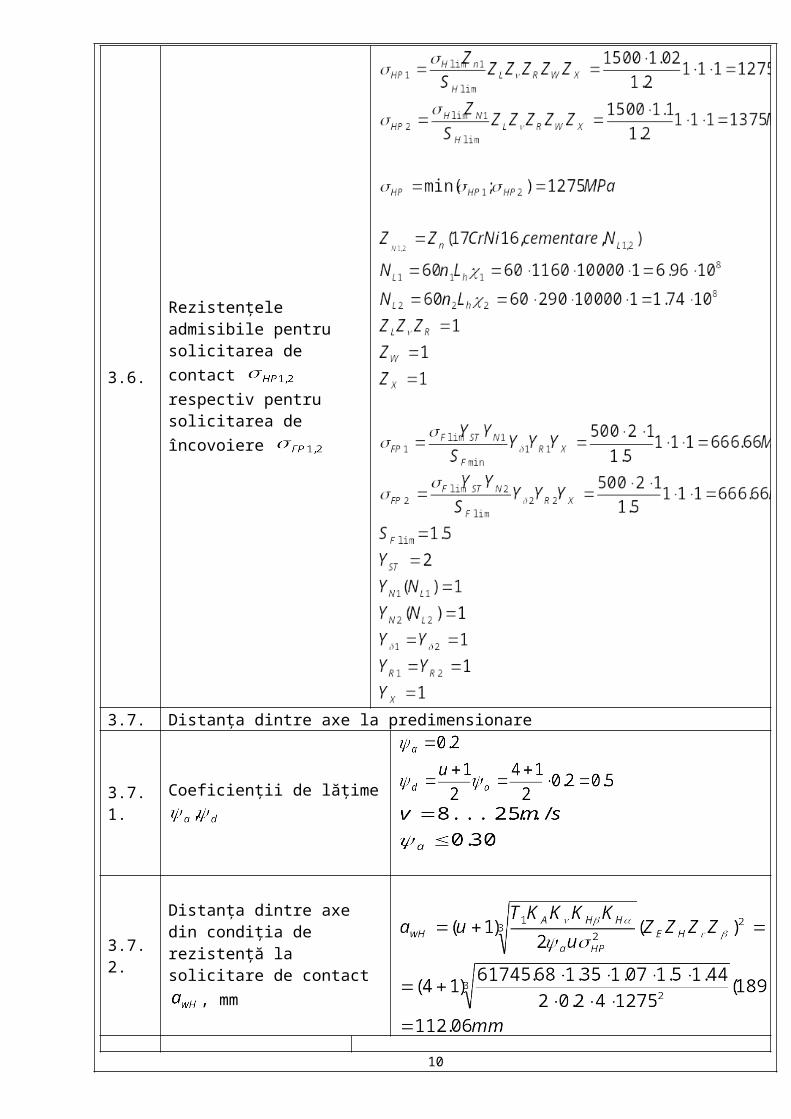
3.6.
Rezistenţele admisibile pentru solicitarea de contact respectiv pentru solicitarea de încovoiere
3.7. Distanţa dintre axe la predimensionare
3.7.1. Coeficienţii de lăţime
7

3.7.2.Distanţa dintre axe din condiţia de rezistenţă la solicitare de contact , mm
3.7.3.
Distanţa dintre axe din condiţia de rezistenţă la solicitare de încovoiere
,mm
3.7.4Distanţa dintre axe din condiţia de rezistenţă la solicitare de încovoiere
, mmSe adoptă din STAS 6055
3.7.5 Latimile preliminare ale rotilor mm
mm
3.8. Modulul danturii mn ,mm
8

3.2. Calculul de dimensionare si verificare
Tabelul 3.2Date de intrare
Denumirea parametrului Simbol şi unitate demăsură
Date de proiectare
Date de intrarePuterea de transmis 7.5Durata de funcţionare 10000
Factorul regimului de funcţionare 1,35Tipul motorului Electric asincronCaracterul sarcinii PulsatorTuraţia pinionului 1160Distanţa dintre axe 112Unghiul de înclinare a danturii 10Coeficientul de lăţime 0,2Numărul de dinţi ai pinionului 18Numărul de dinţi ai roţii conduse 72
Materiale preliminareTipul oţelului Oţeluri de cementare, cementateMarca oţelului 17CrNi16Duritatea superficială HRC 62Duritatea miezului HB 400Tensiunea limită recomandată la contact MPa 1500Tensiunea limită aleasă la contact , MPa 1500
Tensiunea limită recomandată la înconvoiere MPa 500Tensiunea limită aleasă la înconvoiere ,MPa 500
Date privind prelucrarea danturiiRugozitatea flancului 0.4Rugozitatea zonei de racordare 3,2Condiţii impuse in exploatare Se admit un număr de ciupituriCoeficienţii minimi de siguranţăPentru solicitarea de contact 1,2Pentru solicitarea de înconvoiere 1,5
9
Tabelul 3.3Rezultatele calculului de rezistenţă şi geometric
Denumirea parametrului care s-a calculat Treapta IPinion Roată
ELEMENTELE ANGRENAJULUIDistanţa dintre axeDistanţa dintre axe de referinţăModulul normal al danturiiUnghiul de înclinare a danturiiUnghiul de înclinare a danturii pecilindrul de bazăUnghiul de presiune în plan frontalUngiul real de angrenare în plan
frontalnormal
Suma coeficienţilor deplasărilor de profil,în plan normal
Gradul de acoperireîn plan frontalsuplimentartotal
Viteza pe cercul de divizareTreapta de precizie de execuţie 8Vâscozitatea lubrifiantului
Rugozitatea flancului activzonei de racordare
ELEMENTELE ROŢILOR DINŢATEDiametrele cercurilor de capDiametrele cercurilor de piciorDiametrele cercurilor de divizareDiametrele cercurilor de rostogolireDiametrele cercurilor de bazăNumerele de dinţi dinţi dinţiLăţimile roţilorCoeficientul deplasării de profil, înplan normalCoeficientul minim al deplasării de profil,în plan normal
10

Tabelul 3.3 (continuare)
Grosimea dintelui pe cercul de cap,în plan normalGrosimea minimă a dintelui pe cercul de cap,în plan normal
ELEMENTELE ANGRENAJULUI ECHIVALENTNumerele de dinţiDiametrele cercurilor de divizareDiametrele cercurilor de bazăDiametrele cercurilor de capDistanţa dintre axeGradul de acoperire
FACTORI DE CALCULFactorul regimului de funcţionareFactorul dinamicFactorii de repartizare a sarcinii pelăţimea danturii
Factorii de repartizare a sarcinii în planfrontal
Factorul de elasticitate al materialelor roţilor -Factorul zonei de contact -Factorii înclinării danturii
Factorii de formă ai dinţilor -
Factorii de corecţie a tensiunilor deînconvoiere
-
Factorul de lubrifiere -Factorul de viteză -Factorii de rugozitateFactorii relativi de sensibilitate -
Factorii de durabilitate
Coeficienţii minimi de siguranţă
11

Tabelul 3.3 (continuare)
TENSIUNI ŞI MATERIALE
Tensiuni limită alese
Tensiuni admisibile
Tensiuni efective
Coeficientul delăţime
iniţialrecalculat
ELEMENTE DE CONTROLCota peste dinti
Numarul de dinti pentru masurarea cotei peste dinti
Lungimea peste dinti in plan normal
Coarda constanta a dintelui
Coarda constanta a dintelui in plan normal
Coarda constanta a dintelui in plan frontal
Inaltimea la coarda constanta a dintelui in plan normal
Inaltimea la coarda constanta a dintelui in plan frontal
4. SCHEMA CINEMATICA A REDUCTORULUI
4.1 Calculul de predimensionare a arborilor:Arborii reductorului sunt supuşi la torsiune şi încovoiere. În această fază a proiectării, încovoierea nu poate fi luată în calcul datorită necunoaşterii forţelor ce încarcă arborii şi nici a distanţelor dintre reazeme şi dintre forţe şi reazeme. Ca urmare, pentru a obţine nişte valori orientative ale diametrelor arborilor se va face predimensionarea acestora la torsiune, iar pentru a ţine cont de existenţa încovoierii se va lucra cu valori admisibile pentru arborii I şi II).Relaţia de predimensionare este:
Arbore de intrare
- se adoptă
Arbore de ieşire12

- se adoptă
5. ALEGEREA ABATERILOR SI TOLERANTELOR TEHNOLOGICE ALE ANGRENAJULUI SI ROTII
5.1. Alegerea tipului de ajustaj al rotilor dintate in angrenareDin STAS 6273 se alege Tipul ajustajului rotilor dintate in angrenare: B
5.1.1. Jocul minim necesar dintre flancuri
5.1.2. Jocul minim necesar dintre flancuri, functie de regimul termic al angrenajului
5.1.3. Coeficientii de dilatare termica liniara, angrenaj, respectiv pentru carcasa
5.1.4. Variatia temperaturii, fata de cea standard 200
- pentru angrenaj- pentru carcasa
5.1.5 Jocul minim necesar dintre flancuri, functie de viteza periferica
5.2. Alegerea tipului tolerantei jocului dintre flancuri si a treptei de precizie pentru abaterea distantei dintre axe
Conform STAS 6273 se alege:- tipul tolerantei jocului dintre flancuri: b- treapta de precizie pentru abaterea distantei dintre axe: V
5.3. Alegerea indicilor si complexului de indici de precizie
5.4. Alegerea valorilor indicilor de precizie pentru rotile dintate criteriul preciziei cinematice
13

- toleranta bataii radiale a danturii Fr = 63mm
- toleranta variatiei cotei peste dinti Fvw = 50mm
- toleranta variatiei distantei de masurat dintre axe la o rotatie completa a rotii dintate
F = 90mm criteriul de functionare lina
- abaterile limita ale pasului de baza f = ±21mm
- toleranta abaterii profilului dintelui f =18mm
- abaterile limita ale pasului frontal f = ±22mm
criteriul contactului dintre dinti- toleranta abaterii directiei dintelui F =18mm- abaterile limita ale pasilor axiali in plan normal F =±25mm
criteriul jocului dintre flancuri- abaterea minima a cotei peste dinti
E = 140mm- toleranta cotei peste dinti
T = 100mm
- abaterea minima a grosimii dintelui pe coarda constanta E = 160mm
- toleranta grosimii dintelui pe coarda constanta T = 140mm
5.5. Alegerea valorilor indicilor de precizie pentru angrenaj criteriul contactului dintre dinti
- toleranta abaterii de la paralelism a axelorf = 18mm
- toleranta abaterii de la coplanaritate a axelorf = 9mm
- pata totala de contact pe inaltimea dintilor 40%- pata totala de contact pe latimea dintilor 50%
criteriul jocului dintre flancuri- abaterile limita ale distantei dintre axe fa = ±70mm
6. CALCULUL FORTELOR DIN ANGRENAJE
6.1. Calculul mărimii forţelor
14

Forta tangentiala pentru roata
Forţa radială
Forţa axială
6.2. Stabilirea sensului forţelor
fig.6.1
7. CALCULUL ARBORILOR
7.1. Stabilirea schemelor de incarcare cu forte ale arborilor, in cele doua plane, orizontal si vertical
15

Arborele de intrare:
Fig.7.1
Arborele de iesire:
Fig.7.2
7.2. Alegerea montajului cu rulmenti pentru arborii de intrare si de iesire
Rulmenţii radiali - axiali cu role conice preiau atât sarcini radiale cât şi sarcini axiale; datorită contactului mai favorabil dintre role şi calea de rulare din inele ei au, la aceleaşi dimensiuni, capacităţi de încărcare şi durabilităţi mai mari decât rulmenţii cu bile.
16

Montajul în “ X “ se utilizează la arbori mai lungi, pe care roţile sunt montate între lagăre.Reglarea jocului în rulmenţi se face cu ajutorul capacelor ce fixează inelele exterioare.Rulmenţii radial-axiali cu role conice, datorită construcţiei lor, introduc forţe axiale suplimentare.
Alegerea rulmenţilor radiali-axiali cu role conice pe un rând:
Fig.7.3
Tabelul 7.3.Extras din STAS 3920-87
d[mm]
D[mm]
B[mm]
C[mm]
T[mm]
a[mm] e Cr
[KN]Cor
[KN] Y Y0 Simbol
I 20 52 15 13 16.25 11 0.3 32 37.4 2 1.1 30304
II 25 62 17 15 18.25 13 0.3 41 48 2 1.1 30305
7.3. Stabilirea distantei dintre punctele de aplicatie ale fortelor exterioare si ale reactiunilor. Detreminarea reactiunilor din lagare pentru cele doua plane [H],[V] pentru arborele de iesire:
17

Fig.7.4
Calculul lungimii arborelui de iesire
În plan orizontal
În plan vertical
18

Determinarea reactiunilor din cele doua lagare:
Trasarea diagramei de momente incovoiere in cele doua plane [H] si [V]
Fig.7.5
19

Fig.7.6
Determinarea momentelor incovoietoare maxime totale (momentul încovoietor rezultant):
7.4. Verificarea arboreluli de iesire la solicitari compuse
Verificarea la solicitare compusă (încovoiere şi torsiune) se face pentru secţiunile încare momentul echivalent este maxim sau pentru cele în care aria este diminuată datorită salturilor de diametru.
Compresiune data de Fa2
Torsiune
Incovoiere
8. ALEGEREA SI VERIFICAREA ASAMBLARILOR CU PENE PARALELE
8.1. Alegerea si verificarea asamblarilor cu pene paralele arborele de iesire
Asamblarea roţilor dinţate, a roţilor de curea şi a cuplajelor pe arbori se realizează de obicei cu ajutorul penelor paralele. Uneori se folosesc şi alte tipuri de asamblări (cu strângere proprie, prin caneluri, prin pene inclinate sau prin strângere pe con). De obicei, pinioanele au diametre apropiate de cele ale arborilor aşa încât ele se execută dintr-o bucată cu arborele; se alege această soluţie dacă diametrul de picior al roţii dinţate d f satisface condiţia d f ≤(1,4...1,5)da unde da - diametrul arborelui în dreptul roţii dinţate. După estimarea diametrului arborelui da în zona de asamblare prin pană paralelă se aleg din STAS 1004 – 81 dimensiunile b × h ale secţiunii penei. Se determină apoi lungimea necesară a penei şi se verifică pe baza solicitărilor la strivire şi forfecare:
20

fig.8.1
Determinarea lungimii de calcul:
Din STAS 1004 se alege l = 50mmDeoarece l>>b2 se adopta 2 pene A8x7x25 STAS 1004-81/OL60 puse la 1800
Calculul capetelor de arbori
La intrare si la iesire
Tabelul 8.1Extras din STAS 8724/2 – 71
dh l lp bI 16 40 36 5II 20 50 45 6
21

Fig. 8.1.
9. VERIFICAREA MONTAJELOR CU RULMENTI
9.1. Verificarea montajului cu rulmenti pentru arborele de iesire
Fig.9.1
Forta radial din lagarul C, Frc = Rc = 1410.59N
Forta radial din algarul D, FrD = RD = 1788.18N
Fa = 486.04N
Stabilirea fortelor axiale suplimentare
Stabilrea fortelor axiale totale din lagar
Lagarul D
Stabilirea zonei in care se gaseste incarcarea rulmentului
22

rulmentul se gaseste in zona a II-a unde nu se poate neglija
influenta fortei axiale asupra sarcinii dinamice echivalente
Sarcina dinamica echivalenta
V=1.0 inelul interior fiind rotor
Durabilitatea rulmentului
Capacitatea dinamica de incarcare necesara
Durabilitatea asigurata de rulment
Durata de functionare asigurata
10. ALEGEREA SI JUSTIFICAREA SISTEMULUI DE UNGERE SI DE ETANSARE
Alegerea lubrifiantului pentru angrenaje se face ţinând seama de parametrii cinematici şi de încărcare ai angrenajelor, de tipul acestora şi de caracteristicile materialelor din care sunt confecţionate. Pentru reductoarele cu mai multe trepte, lubrifiantul se alege pe baza regimului cinematic şi încărcării treptei care transmite cel mai mare moment.
Ungerea prin imersiune (barbotarea) se foloseşte pentru viteze sub 12 m/s. Pentru o ungere eficace trebuie să pătrundă roata in ulei. Adâncimea de scufundare este de minim un modul (10 mm) şi maxim şase module. Cantitatea de ulei din baie se va lua egală cu (0,35...0,7) litri pentru fiecare kilowatt transmis.
Pentru ungere se va folosi uleiul TIN 200 EP, cu vâscozitatea J50 = 200cSt . Tabelul 10.1
Simbolul Vîscozitatea Indice de Punct de Inflamabili
23

uleiului
cinematica la
500C ν50
(cSt)viscozitate IV congelare
( 0C )tate( 0C )
TIN 200 EP 200-220 70 -10 240
Nivelul uleiului se va verifica prin intermediul geamului iar dopul de aerisire va servi pentru eliminarea gazelor.Perioada de schimb a uleiului este de 1000 - 5000 de ore de funcţionare ( în cazul în care angrenajul este etanşat şi uleiul este filtrat după fiecare 1500 de ore de funcţionare ). Pentru filtrare se pot folosi filtre magnetice. Se vor folosi lubrifianţi lichizi, pentru că faţă de cei consistenţi, au o serie de avantaje ca: stabilitatea fizico-chimică mai mare, posibilitatea utilizării la turaţii şi temperaturi ridicate, cât şi la temperaturi foarte joase, evacuarea mai uşoară a căldurii ce se produce în lagăr, rezistenţa mai mică opusă corpurilor de rostogolire. Ca dezavantaje se pot amintii: etanşarea dificilă a lagărului, pierderi prin scurgeri în timp. Cantitatea de unsoare necesară ungerii unui lagăr cu rulmenţi, în general depinde de turaţia arborelui. Intervalul de ungere se stabileşte de obicei pe baza de experienţă iar atunci când aceasta nu există se recomandă un control periodic la început pentru a stabili practic intervalele de ungere. Între capace şi carcasă se vor folosi ca elemente de etanşare garnituri, iar intre arbori şi carcasă se va folosi manşete.
Datorită turaţiilor mari se alege dispozitiv de etanşare cu manşetă de rotaţie
Fig.10.1
Se aleg două manşete : A19x35 şi A24x40 STAS 7950/2-72
Tabelul 10.2Nr h D
I 19 7 35
II 24 10 40
24

11. CALCULUL TRANSMISIEI PRIN LANT
11.11. Date de intrare:Puterea P = 7.5KW
11.12. Rapotul de transmitere al transmiterii: iL=1.25
11.13. Momentul de torsiune la roata de lant conducatoare Mt1
11.14. Turatia rotii de lant conducatoare
n1 = 1450rot/min11.15.Conditii functionale constructive
Caracterul sarcinii dinamica Inclinarea liniei centrelor rotilor (transmisie verticala) Modul de reglare a intinderii transmisiei (reglare prin roti sau role de intindere) Modul de ungere (ungere periodica)
11.20. Elemente geometirce si cinematice11.21. Numarul de dinti ai rotii de lant conducatoare, z1
Se alege din Anexa 1z1 = 28
11.22. Numarul de dinti ai rotii de lant conduse, z2
Z2max =120-pentru lant cu role
11.23. Pasul p, mm
Se aleg urmatoarele trei pasuri: 8 mm, 9.525 mm, 12.7 mm
LANŢURI CU ROLE
25

Fig.11.1Tabelul 11.1
ISO p p x b1 b1 b2 d2 d1 l1 qnr. mm in mm mm mm mm mm mm
05B-1 8.00 8x3 mm 3 4.77 2.31 5.00 8.2 7.2006B-1 9.525 3/8x7/32” 5.72 8.53 3.28 6.35 13.1 8.2
Tabelul 11.2ISO p p x b1 b1 b2 d2 d1 l1 e qnr. mm in mm mm mm mm mm mm mm
08A-2 12.7 1/2x5/16” 7.85 11.18 3.96 7.92 30.6 14.38 11.8
11.24. Diametrul rotii de lant conducatoare Dd1, mm
11.25. Diametrul rotii de lant conduse
11.26. Viteza medie
26

11.27. Aria de strivire dintre bolt si bucsa
11.30. Stabilirea variantei optime de lant
11.31. Coeficentul de corectie global
11.311 Coeficentul de dinamicitate al sarcinii
Kd = 1,2…1,5 - pentru sarcini dinamice
Kd = 1.2
11.312. Coeficentul distantei dintre axe
KA = 1
Pentru:
11.313. Coeficentul inclinarii liniei centrelor rotilor fata de orizontala
Ki = 1 -pentru inclinari de pana la 60o
11.314. Coeficentul modului de reglare a intinderii transmisiei
Kr =1.1 – la transmisiile fara reglare
11.315. Coeficentul modului de ungere a transmisiei
Ku = 1.5- pentru ungerea periodica
11.316. Coeficentul regimului de functionare
Kf = 1- pentru functionare intr-un schimb
11.32. Forta admisibila
27

11.33. Puterea admisibila
11.34. Numarul de randuri
11.35. Stabilirea variantei optime de lant
zr = 2 p =12.7
11.40. Definitivarea elementelor geometrice
11.41. Distanta dintre axe preliminara
11.42. Numarul de zale
Se adopta w = 102buc
11.43. Lungimea lantului
28

11.44. Distanta dintre axa recalculata
11.50. Forte in transmisia prin lant
11.51. Forta de intindere datorata greutatii proprii a lantului
11.511. Coeficentul de pozitie a liniei centrelor rotilor fata de orizontala, la calculul fortei de
intindere datorata greutatii proprii a lantului
Kp = 1
11.512. Greutatea pe metro liniar de lant
11.52. Forta de intindere datorata fortelor centrifuge
11.53. Forta din ramura pasiva a lantului
11.54. Forta utila
11.55. Forta din ramura active a lantului
11.56. Verificarea lantului la rupere
Sarcina minima de rupere pentru lant dublu: Fr = 28000N se ia din Stasul de lanturi
11.57. Forta care actioneaza asupra arborilor
12. CALCULUL RANDAMENTULUI TRANSMISIEI MECANICE
Randamentul motorului electric:
29

Randamentul reductorului: Randamentul transmisiei prin lant:
13. MEMORIU JUSTIFICATIV CU PRIVIRE LA ALEGEREA MATERIALELOR, A SEMIFABRICATELOR ŞI SOLUŢIILOR CONSTRUCTIVE, PENTRU PRINCIPALELE PIESE DIN COMPONENŢA REDUCTORULUI
Reductoarele cilindrice sunt mecanisme cu roţi dinţate, montate în carcase închise şi folosite pentru reducerea turaţiei, concomitent cu amplificarea momentului de torsiune transmis. Necesitatea folosirii reductoarelor în transmisii mecanice, rezultă din condiţii economice; prin folosirea reductoarelor se pot alege motoare cu turaţii mari care au gabarit redus.
În cadrul proiectării un rol important îl are alegerea materialelor atât din punct de vedere al preţului de cost, cât şi a rezistenţei, a uşoarei prelucrări şi interschimbabilităţii cu alte organe de maşini.
Pe cât se poate organele de asamblare şi asigurare vor corespunde cu tehnica de fabricaţie conform STAS, cu respectarea caracteristicilor mecanice.
Se va folosi motorul electric de tip asincron având o putere de 7.5 KW funcţionând la turaţia de 1450 rot/min.
Pinionul se execută corp comun cu arborele ne fiind necesare mijloace de fixare a acestora pe arbore. Se va executa din oţel marca 17CrNi16 iar tratamentul termic aplicat fiind cementarea.
Roata dinţată se va fixa pe arbore prin pene paralele STAS 1004-81 executate din OL60.Carcasele şi capacele se vor executa din Fc-200 STAS 1004-75 fiind o fontă cenuşie cu grafit
lamelar, cu o rezistenţă la tracţiune de 200 N/mm2.
14. NORME DE TEHNICA SECURITĂŢII MUNCII
La lucrul sau la exploatarea reductorului va trebui să se ţină seama de următoarele prevederi cu privire la norme de tehnica securităţii muncii:
1. Reductorul să fie fixat cu şuruburi de bancul de lucru.2. Nu se vor folosi reductoare cărora le lipsesc piese, componente.3. Nu se va schimba uleiul în timpul funcţionării.4. Nu se verifica uleiul în timpul funcţionării.5. Piesele defecte sau uzate se vor înlocui cu altele corespunzătoare.6. Nu se fac reglaje la jocul din rulmenţi în timpul funcţionării.7. Se respectă intervalele de schimb al uleiului şi al rulmenţilor.8. Se are in vedere de a nu depăşi orele de funcţionare al reductorului.
30