reference governor applications - lirmm
TRANSCRIPT
Reference Governor
Applications
1

Aircraft Flight Control
Example
See f16aircraft.m
2

• Pitch pointing control system for F16 fighter aircraft considered by Sobel and Shapiro (IEEE Control Systems Magazine, “Eigenstructure assignment for design of multimode flight control systems”, 5(2) 1985)
• Well-designed MIMO controller for tracking pitch angle and flight path angle commands using elevator and flaperon
• Actuator saturation is not considered
• Aircraft model is open-loop unstable
• Closed-loop response becomes unstable for larger commands due to actuator range and rate limits!
Aircraft control example
3

4 6 8 10 12-10
-5
0
5
10
Pitch angle (𝜃) and flight path angle (𝛾) (deg)
Effects of Actuator Saturation
• Simulated closed-loop response for larger pitch angle and flight path angle commands with actuator range and rate limits imposed
𝑟𝜃
𝑟𝛾
𝜃 𝛾
Time (sec)
4
-10-10-10
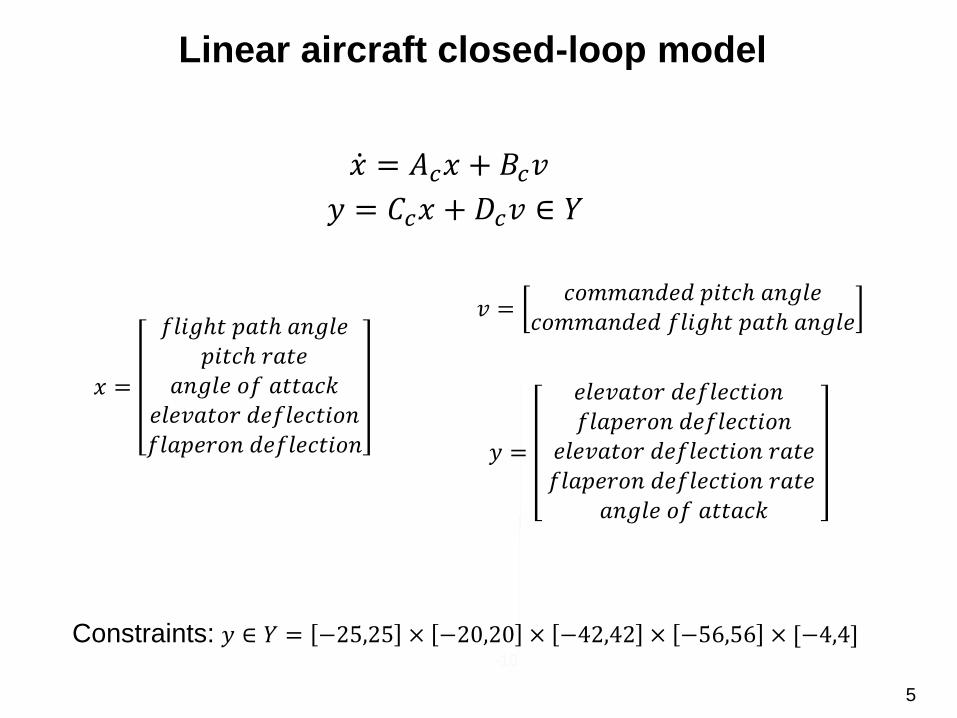
𝑥 =
𝑓𝑙𝑖𝑔ℎ𝑡 𝑝𝑎𝑡ℎ 𝑎𝑛𝑔𝑙𝑒𝑝𝑖𝑡𝑐ℎ 𝑟𝑎𝑡𝑒
𝑎𝑛𝑔𝑙𝑒 𝑜𝑓 𝑎𝑡𝑡𝑎𝑐𝑘𝑒𝑙𝑒𝑣𝑎𝑡𝑜𝑟 𝑑𝑒𝑓𝑙𝑒𝑐𝑡𝑖𝑜𝑛𝑓𝑙𝑎𝑝𝑒𝑟𝑜𝑛 𝑑𝑒𝑓𝑙𝑒𝑐𝑡𝑖𝑜𝑛
𝑣 =𝑐𝑜𝑚𝑚𝑎𝑛𝑑𝑒𝑑 𝑝𝑖𝑡𝑐ℎ 𝑎𝑛𝑔𝑙𝑒
𝑐𝑜𝑚𝑚𝑎𝑛𝑑𝑒𝑑 𝑓𝑙𝑖𝑔ℎ𝑡 𝑝𝑎𝑡ℎ 𝑎𝑛𝑔𝑙𝑒
𝑦 =
𝑒𝑙𝑒𝑣𝑎𝑡𝑜𝑟 𝑑𝑒𝑓𝑙𝑒𝑐𝑡𝑖𝑜𝑛𝑓𝑙𝑎𝑝𝑒𝑟𝑜𝑛 𝑑𝑒𝑓𝑙𝑒𝑐𝑡𝑖𝑜𝑛
𝑒𝑙𝑒𝑣𝑎𝑡𝑜𝑟 𝑑𝑒𝑓𝑙𝑒𝑐𝑡𝑖𝑜𝑛 𝑟𝑎𝑡𝑒𝑓𝑙𝑎𝑝𝑒𝑟𝑜𝑛 𝑑𝑒𝑓𝑙𝑒𝑐𝑡𝑖𝑜𝑛 𝑟𝑎𝑡𝑒
𝑎𝑛𝑔𝑙𝑒 𝑜𝑓 𝑎𝑡𝑡𝑎𝑐𝑘
Constraints: 𝑦 ∈ 𝑌 = −25,25 × −20,20 × −42,42 × −56,56 × [−4,4]
ሶ𝑥 = 𝐴𝑐𝑥 + 𝐵𝑐𝑣
𝑦 = 𝐶𝑐𝑥 + 𝐷𝑐𝑣 ∈ 𝑌
Linear aircraft closed-loop model
5

Ac =[0, 0.0067, 1.341, 0.169, 0.252;
0, -0.869, 43.2, -17.25, -1.577;
0, 0.993, -1.341, -0.169, -0.252;
65, 17.82, 142.3, -30.5, -1.68;
-122,-17.95,-200.6 8.412, -17.89];
Cc = [0, 0, 0, 1, 0;
0, 0, 0, 0, 1;
65, 17.82, 142.3, -30.5, -1.68;
-122, -17.95,-200.6 8.412, -17.89;
0, 0, 1, 0, 0];
Bc = [0, 0;
0, 0;
0, 0;
-57.6, -7.34;
40.4, 81.6];
Dc = [ 0, 0;
0, 0;
-57.6, -7.34;
40.4, 81.6;
0, 0];
Linear aircraft closed-loop model
Closed-loop model (continuous-time) from Sobel and Shapiro, J. Guidance, Control and Dynamics, 8(2) (1985) 181-187.
6

• Convert to a discrete-time model
% Convert the above model to discrete-time using sampling
period of 20 msec
dT = 0.02;
[A,B,C,D]= ssdata( c2d( ss(Ac, Bc, Cc, Dc), dT) );
Discrete-time model
7
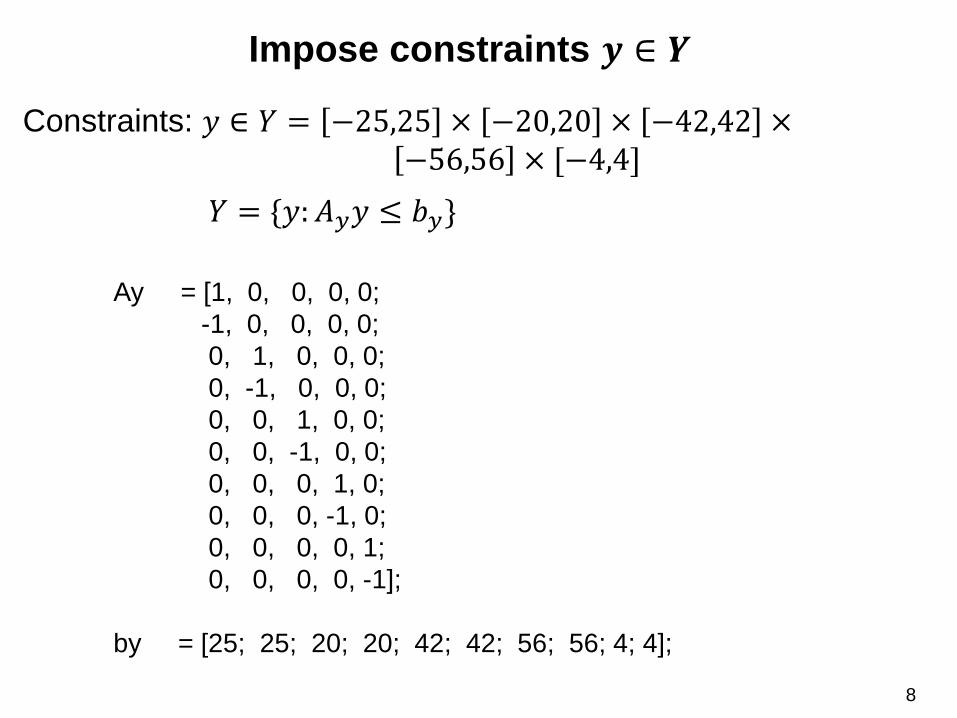
Ay = [1, 0, 0, 0, 0;
-1, 0, 0, 0, 0;
0, 1, 0, 0, 0;
0, -1, 0, 0, 0;
0, 0, 1, 0, 0;
0, 0, -1, 0, 0;
0, 0, 0, 1, 0;
0, 0, 0, -1, 0;
0, 0, 0, 0, 1;
0, 0, 0, 0, -1];
by = [25; 25; 20; 20; 42; 42; 56; 56; 4; 4];
Impose constraints 𝒚 ∈ 𝒀
Constraints: 𝑦 ∈ 𝑌 = −25,25 × −20,20 × −42,42 ×−56,56 × [−4,4]
𝑌 = {𝑦: 𝐴𝑦𝑦 ≤ 𝑏𝑦}
8

Construct ෩𝑶∞ (brute force)
% --- Construct O-infinity (brute force) ----
tstar = 100; % horizon
AOi = [ ]; bOi = [ ];
n = size(A,1);
I = eye(n,n);
for (t = 0:1:tstar),
AOi = [AOi; Ay*(C*inv(I-A)*(I-A^t)*B+D), Ay*(C*A^t)];
bOi = [bOi; by];
end;
% --- Augment tightened steady-state constraints ----
epsi = 0.01;
H = C*inv(I-A)*B+D;
AOi = [AOi; Ay*H,Ay*C*zeros(n,n)];
bOi = [bOi; by*(1-epsi)];
% --- Eliminate redundant inequalities ---
if exist('lp.m','file')>0,
[AOi, bOi] = elimm1(AOi, bOi,1e-12);
end;9

Simulate reference governor
% --- Perform simulations ---
x0 = [0, 0, 0, 0, 0]'; v0 = [0; 0];
[Thist, Vhist, Xhist, Kphist, Rhist] = flow(v0, x0, Rhist, A, B, AOi, bOi);
10

Responses with reference governor
Pitch angle
Flight path angle
𝑟𝜃𝑣𝜃𝜃
𝑟𝛾𝑣𝛾𝛾
≤ 0 ⇒ 𝑐𝑜𝑛𝑠𝑡𝑟𝑎𝑖𝑛𝑡𝑠 𝑠𝑎𝑡𝑖𝑠𝑓𝑖𝑒𝑑
Constraints
Ref. Gov. 𝜿(𝒕)
11

Ay = [1, 0, 0, 0, 0;
-1, 0, 0, 0, 0;
0, 1, 0, 0, 0;
0, -1, 0, 0, 0;
0, 0, 1, 0, 0;
0, 0, -1, 0, 0;
0, 0, 0, 1, 0;
0, 0, 0, -1, 0;
0, 0, 0, 0, 1;
0, 0, 0, 0, -1];
by = [25; 25; 20; 20; 42/4; 42/4; 56/4; 56/4; 4; 4];
Tighten rate limits
12

Responses with reference governor
Pitch angle
Flight path angle
𝑟𝜃𝑣𝜃𝜃
𝑟𝛾𝑣𝛾𝛾
≤ 0 ⇒ 𝑐𝑜𝑛𝑠𝑡𝑟𝑎𝑖𝑛𝑡𝑠 𝑠𝑎𝑡𝑖𝑠𝑓𝑖𝑒𝑑
Constraints
Ref. Gov. 𝜿(𝒕)
13
Vehicle Rollover ExampleSee vehiclerollover.m
14
Kolmanovsky, I.V., Gilbert, E.G., and Tseng, E., “Constrained control of vehicle
steering,” Proceedings of 2009 IEEE Multi-conference on Systems and Control, St.
Petersburg, Russia, May, 2009, pp. 576-581.

Rollover prevention
• Motivation: Rollover crashes are the leading cause of fatalities
in SUVs.
• Modify driver commanded steering angle if necessary with
Active Front Steer (AFS) system to avoid rollover
• Intervene on other actuators (brakes, etc.) as appropriate
15

Rollover prevention
• Linear model is based on Solmax, Corless and Shorten, “A
methodology for the design of robust rollover prevention
controllers for automotive vehicles: Part 2 - Active steering“,
Proceedings of 2007 American Control Conference, pp.
1606-1611.
• Sample period: 𝑇𝑠 = 10 msec
• Note that tyre force saturation is neglected in the linear
model. This is a more conservative approach, the vehicle is
less likely to rollover if saturation is included.
• Longitudinal speed is treated as a constant parameter
during the maneuver
16

Rollover prevention by modifying steering angle
• Model:
𝑥 𝑡 + 1 = 𝐴𝑥 𝑡 + 𝐵𝛿(𝑡)
𝐴 = 𝐴 𝑣𝑚𝑝𝑠 , 𝐵 = 𝐵(𝑣𝑚𝑝𝑠)
𝑥 =
𝑙𝑎𝑡𝑒𝑟𝑎𝑙 𝑣𝑒𝑙𝑜𝑐𝑖𝑡𝑦 𝑜𝑓 𝐶𝐺, 𝑣𝑦
𝑦𝑎𝑤 𝑟𝑎𝑡𝑒 𝑜𝑓 𝑢𝑛𝑠𝑝𝑟𝑢𝑛𝑔 𝑚𝑎𝑠𝑠, ሶ𝜓
𝑟𝑜𝑙𝑙 𝑟𝑎𝑡𝑒 𝑜𝑓 𝑠𝑝𝑟𝑢𝑛𝑔 𝑚𝑎𝑠𝑠, ሶ𝜙𝑟𝑜𝑙𝑙 𝑎𝑛𝑔𝑙𝑒 𝑜𝑓 𝑠𝑝𝑟𝑢𝑛𝑔 𝑚𝑎𝑠𝑠, 𝜙
𝛿𝑣𝑚𝑝𝑠
=𝑠𝑡𝑒𝑒𝑟𝑖𝑛𝑔 𝑎𝑛𝑔𝑙𝑒 𝑎𝑡 𝑑𝑟𝑖𝑣𝑒𝑟 𝑤ℎ𝑒𝑒𝑙 𝑖𝑛 𝑑𝑒𝑔
𝑙𝑜𝑛𝑔𝑖𝑡𝑢𝑑𝑖𝑛𝑎𝑙 𝑣𝑒ℎ𝑖𝑐𝑙𝑒 𝑠𝑝𝑒𝑒𝑑
(Kolmanovsky, Gilbert, Tseng, 2009)
17

Discrete-time model
• Model:
𝐴 =
0.8646 −0.1382 −0.0379 −0.28690.0379 0.8701 −0.0008 −0.0062−0.1081 0.0595 0.8938 −0.8054−0.0006 0.0003 0.0095 0.9959
𝐵 = 10−3 ×
0.93510.74500.84220.0044
𝑣𝑚𝑝𝑠 = 22.5 𝑚/ sec ⇒
18

Constraints
• Constraints on load transfer ratio:
𝑦 𝑡 = 𝐶𝑥 𝑡 + 𝐷𝑣 ∈ 𝑌 = −0.95, 0.95
𝑦 =1
𝑚𝑔𝐹𝑅 − 𝐹𝐿 =
2
𝑚𝑔𝑇𝑐 ሶ𝜙 + 𝑘 𝜙
𝑦: 𝑙𝑜𝑎𝑑 𝑡𝑟𝑎𝑛𝑠𝑓𝑒𝑟 𝑟𝑎𝑡𝑖𝑜
𝐶 = 0 0 −0.4412 −3.9793
𝐷 = 0.0175
19

Responses with reference governor
Constraints
Ref. Gov. 𝜿(𝒕)
𝑟𝜃𝑣𝜃𝜃
Steering angle
Path on X-Y plane
𝑟𝜃𝑣𝜃
no R.G.
with R.G.
constraint
violated
20

Anti-rollover reference governor
Bencatel, R., Tian, R., Girard, A., and Kolmanovsky, I.V. “Reference governor strategies
for vehicle rollover avoidance,” IEEE Transactions on Control Systems Technology, vol.
26, no. 6, pp. 1954 – 1969, 2018.
Implementation on a nonlinear model in CARSIM®

Anti-rollover reference governor

• ECG modifies steering and differential braking to prevent rollover
• Nonlinear model
• Vehicle trajectory on X -Y plane with ECG close to the reference trajectory
Anti-rollover extended command governor
Tian, R., Bencatel, R., Girard, A., and Kolmanovsky, I.V., “Coordinated control of active
steering and differential braking using extended command governor for rollover avoidance,”
Proceedings of 2017 ASME Dynamic Systems and Control Conference, Tysons, Virginia,
Paper DSCC2017-5033.

Learning reference governor
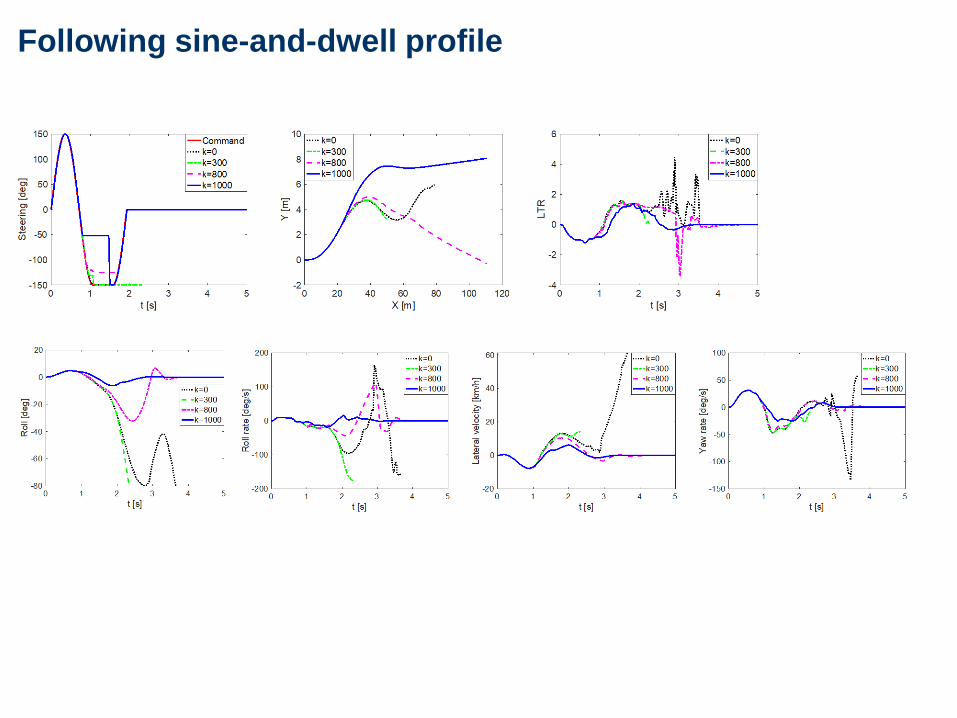
Following sine-and-dwell profile

Constraint violation rate decreases as learning proceeds
Algorithm details and some convergence analysis are in Liu, Li, Rizzo, Garone, Kolmanovsky, and Girard,
Proceedings of 2019 American Control Conference, to appear.

Bypass Valve
HP Check
Valves
LP Check
Valves
Fuel
Load
Reference governor for constraining piston motion in FPE
Zaseck, K., Brusstar, M., and Kolmanovsky, I.V., “Stability, control, and constraint enforcement of piston motion
in a hydraulic free-piston engine,” IEEE Transactions on Control Systems Technology, vol. 25, no. 4,
pp. 1284-1296, 2017.

Free piston engine generator
Xun, G., Kolmanovsky I.V., Garone E., Zaseck K., and Chen H., “Constrained control of free piston engine
generator based on implicit reference governor,” SCIENCE CHINA Information Sciences (SCIS), vol. 61,
no. 7, pp. http://scis.scichina.com, 070203:1–070203:17, 2018

Spacecraft Relative Motion Control
Example
with Linear and Quadratic
Constraints
The example is patterned after Kalabic, U.; Kolmanovsky, I.; Gilbert, E., "Reference
governors for linear systems with nonlinear constraints," 2011 50th IEEE
Conference on Decision and Control, pp.2680-2686, 2011.
see spacecraft_nonlinear_rg.m
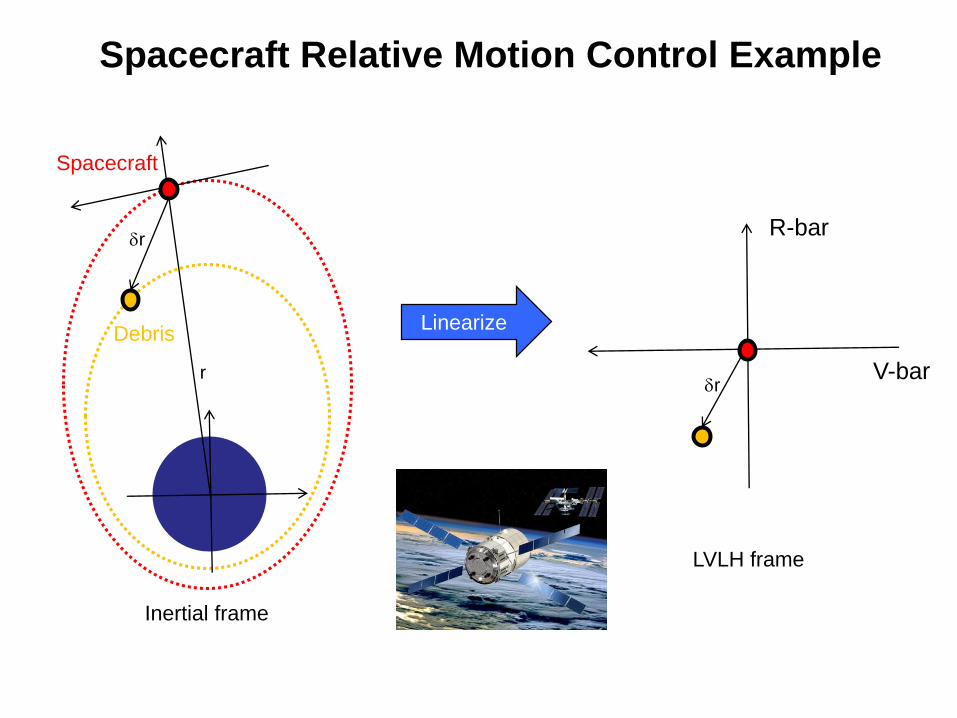
Spacecraft Relative Motion Control Example
Spacecraft
Debris
r
r
Inertial frame
LVLH frame
r
R-bar
V-bar
Linearize

Spacecraft Relative Motion Control Example
x
y
zX
x
y
z
2
2
0 0 0 1 0 0
0 0 0 0 1 0
0 0 0 0 0 1
3 0 0 0 2 0
0 0 0 2 0 0
0 0 0 0 0
cAn n
n
n
𝑥 𝑡 + 1 = 𝐴𝑥 𝑡 + 𝐵𝑢(𝑡)
Relative position (km)
Relative velocity (km/sec)
• Dynamic Model:
0 0 0
0 0 0
0 0 0
1 0 0
0 1 0
0 0 1
cB
𝐴 = 𝑒𝐴𝑐Δ𝑇
𝐵 = 𝑒𝐴𝑐Δ𝑇𝐵𝑐
𝑛 = 0.0011 𝑟𝑎𝑑/𝑠𝑒𝑐 for 350 km altitude Earth orbit
𝑢 𝑡 ∼ "Δ𝑣"
Controller Design
𝑢 𝑡 = −𝐾𝐿𝑄𝑋 𝑡 + Γ𝑣(𝑡)
• Linear Quadratic Regulator:
• 𝑣 𝑡 =
𝑥𝑑𝑒𝑠𝑦𝑑𝑒𝑠𝑧𝑑𝑒𝑠

Constraints [1]
• Line of Sight Cone Constraint configured for the in-track
approach:
𝑥(𝑡)2 + 𝑧(𝑡)2 ≤ 𝑡𝑎𝑛 𝛾 2 𝑦 𝑡 + 0.01 2
𝐶1 𝑡 = 𝑥(𝑡)2 + 𝑧(𝑡)2 − 𝑡𝑎𝑛 𝛾 2 𝑦 𝑡 + 0.01 2 ≤ 0
𝛾 = cone half angle

Constraints [2]
• Thrust / Delta-v Limit assuming single thruster configuration:
𝑢1(𝑡)2 + 𝑢2(𝑡)
2 + 𝑢3 𝑡 2 ≤ 𝑢𝑚𝑎𝑥2
𝐶2(𝑡) = 𝑢1(𝑡)2 + 𝑢2(𝑡)
2 + 𝑢3 𝑡 2 − 𝑢𝑚𝑎𝑥2
𝑢𝑚𝑎𝑥 = 0.001 𝑘𝑚/𝑠𝑒𝑐
Constraints [3]
• Overshoot constraint:
𝑦 𝑡 ≥ 𝑦𝑚𝑖𝑛
𝐶3 𝑡 = −𝑦 𝑡 + 𝑦𝑚𝑖𝑛 ≤ 0
𝑦𝑚𝑖𝑛 = −0.0075 𝑘𝑚

Responses with the reference governor
𝛥𝑇 = 30, 𝑡∗ = 30 sec,
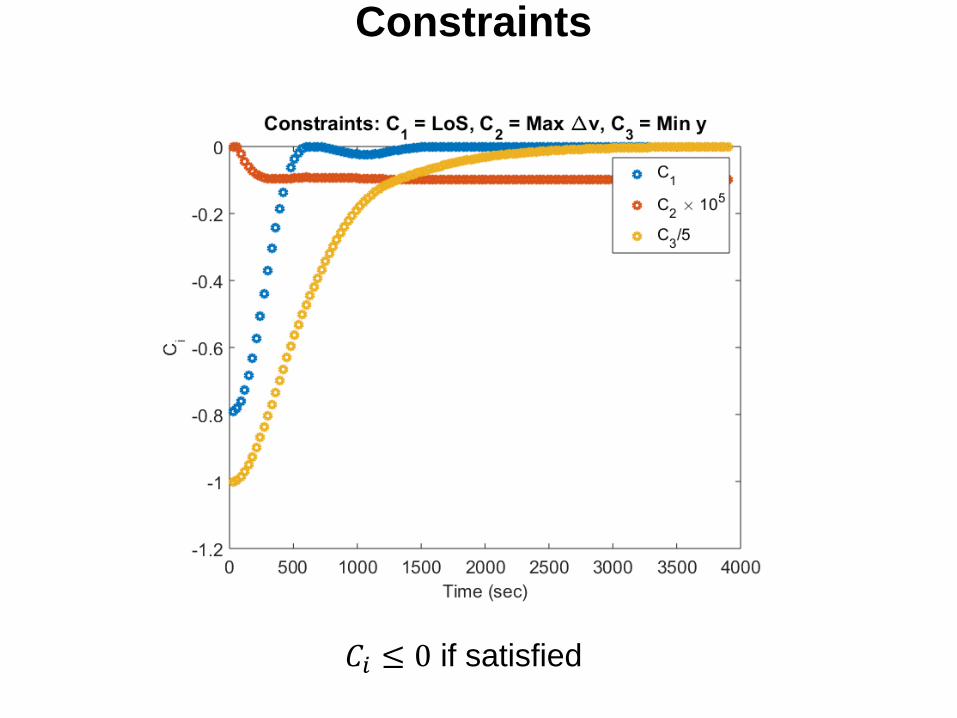
Constraints
𝐶𝑖 ≤ 0 if satisfied

Inputs

Reference governor output

Responses with reference governor

Number of simulation-based response predictions
• Bisection
algorithm is
used
• The case
𝜅 = 1 is
evaluated
first

Incremental RG

Incremental RG

Incremental RG

Fuel Cell System
45

Load Governor
• Fuel cell loads are controllable
• Load governor (LG): An add-on device that
Enforces constraints (𝜆𝑂2 ≥ 𝜆𝑂2,𝑚𝑖𝑛 , 𝑚𝑂2 ≥ 𝑚𝑂2,𝑚𝑖𝑛)
Minimizes the load tracking error
Deals with uncertainties
Fuel Cell
Stack
State
information
Sun and K., IEEE TCST 13 (6), pp. 991-919, 2005
46

Reference Governor Approach
• A load governor is designed based on the reference governor approach
• The demanded current is altered according to
(0 ≤ ≤ 1) is maximized for load tracking performance subject to
constraints being satisfied for all 𝜏 ≥ 𝑘𝑇 if 𝐼𝑠𝑡 𝜏 = 𝐼𝑠𝑡(𝑘𝑇) for 𝜏 ≥ 𝑘𝑇
• Checking if the constraints are satisfied is accomplished through the
simulation a low-order fuel cell model
TkkTkTII
TkIkTIkTTkIkTI
stst
stdstst
)1(),()(
))1(()()(())1(()(
47

Fuel Cell Model
A 4-state fuel cell model is used for the LG implementation
𝑊𝑥,𝑖𝑛,𝑊𝑥,𝑜𝑢𝑡 calculated from orifice equation, 𝑊𝑂2, 𝑟𝑐𝑡, 𝑊𝑣, 𝑔𝑒𝑛
from the
electrochemical principles, and 𝑊𝑣,𝑚𝑏𝑟 from a phenomenological model
mbrvgenvcaoutvcainvcav
caoutNcainNcaN
rctOcaoutOcainOcaO
smoutinin
sm
asm
WWWWm
WWm
WWWm
TWTWV
Rp
,,_,_,,
_,_,,
,_,_,,
222
2222
)(
48

LG Implementation Details
• An inner loop PI controller is used for O2regulation
• The fuel cell model is augmented with a PI controller
• The 5-state model is simulated over a finite horizon for
constraint violation checking
• Maximum is obtained through bi-sectional search
49

Load Governor with an Observer
• Fuel cell states are not measurable
• LG with an observer
• Measured outputs: supply manifold pressure and cell voltage
State
Observer
psm
vfc
50

Dealing with uncertainties
Sources of uncertainties
• State estimation
• FC model
Temperature
Humidity
Vapor/water diffusion across the membrane
Possible effects:
• Infeasible states
• Constraint violation
51
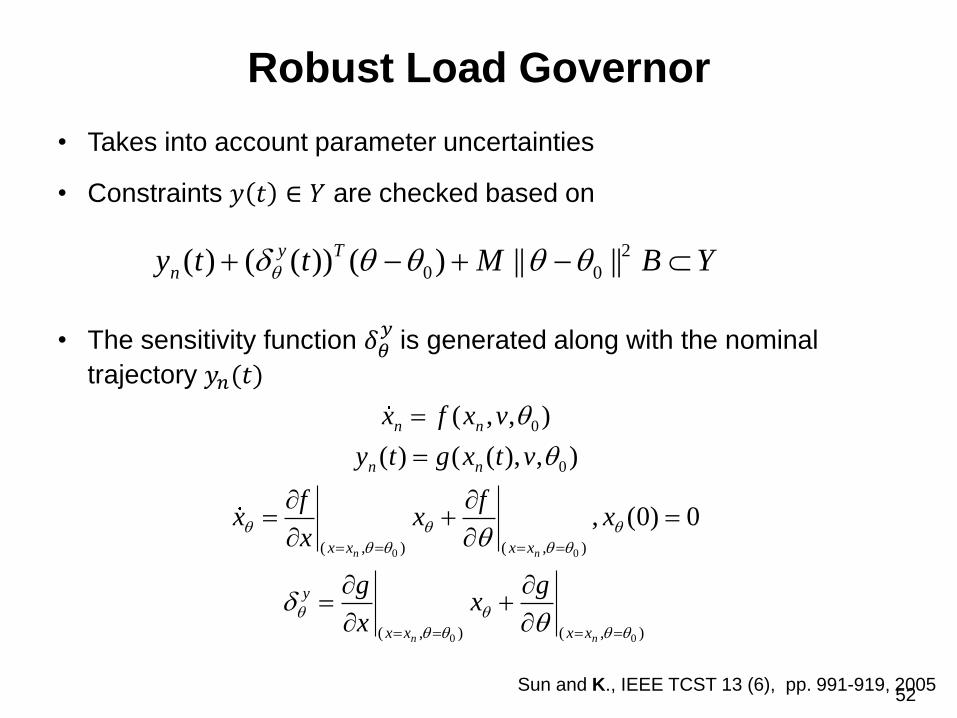
Robust Load Governor
• Takes into account parameter uncertainties
• Constraints 𝑦 𝑡 ∈ 𝑌 are checked based on
• The sensitivity function 𝛿𝜃𝑦
is generated along with the nominal
trajectory 𝑦𝑛(𝑡)
2
0 0( ) ( ( )) ( ) || ||y T
ny t t M B Y
0 0
0 0
0
0
( , ) ( , )
( , ) ( , )
( , , )
( ) ( ( ), , )
, (0) 0
n n
n n
n n
n n
x x x x
y
x x x x
x f x v
y t g x t v
f fx x x
x
g gx
x
Sun and K., IEEE TCST 13 (6), pp. 991-919, 200552
Simulations Setup
LG and RLG are applied to the fuel cell model with
• Large step load changes
• Parameter uncertainties
• Up to 50% change in relative humidity in the supply manifold
• Up to 25kPa in the vapor saturation pressure inside the
cathode (corresponds to about 10oC change in stack
operating temperature)
• Up to 50% change in vapor diffusion coefficient across the
membrane
53

Simulations Results
Nominal system Perturbed system
54
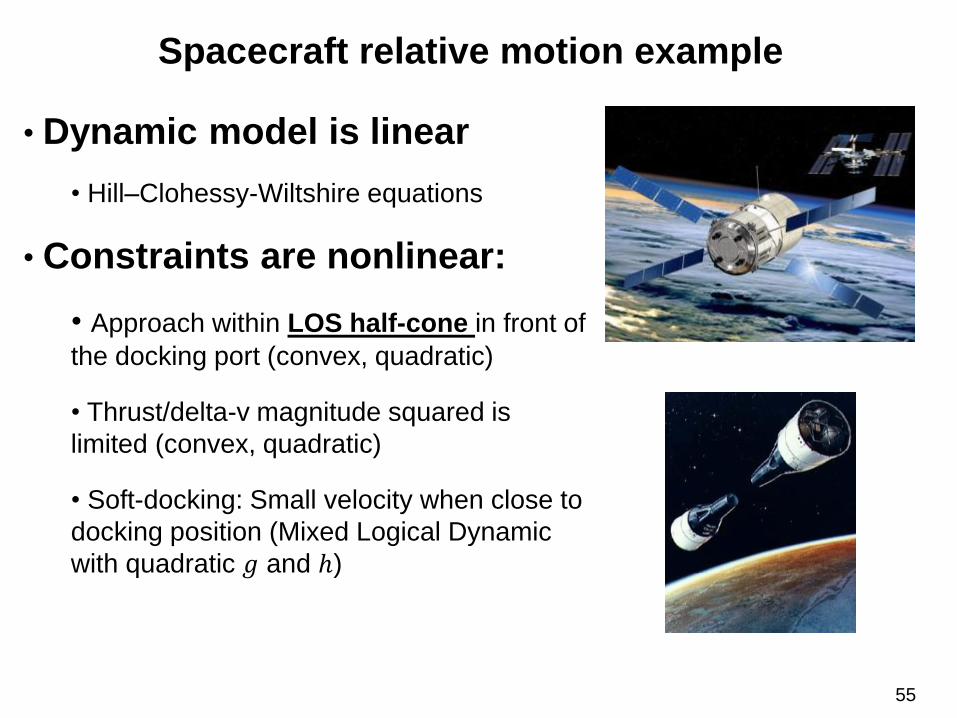
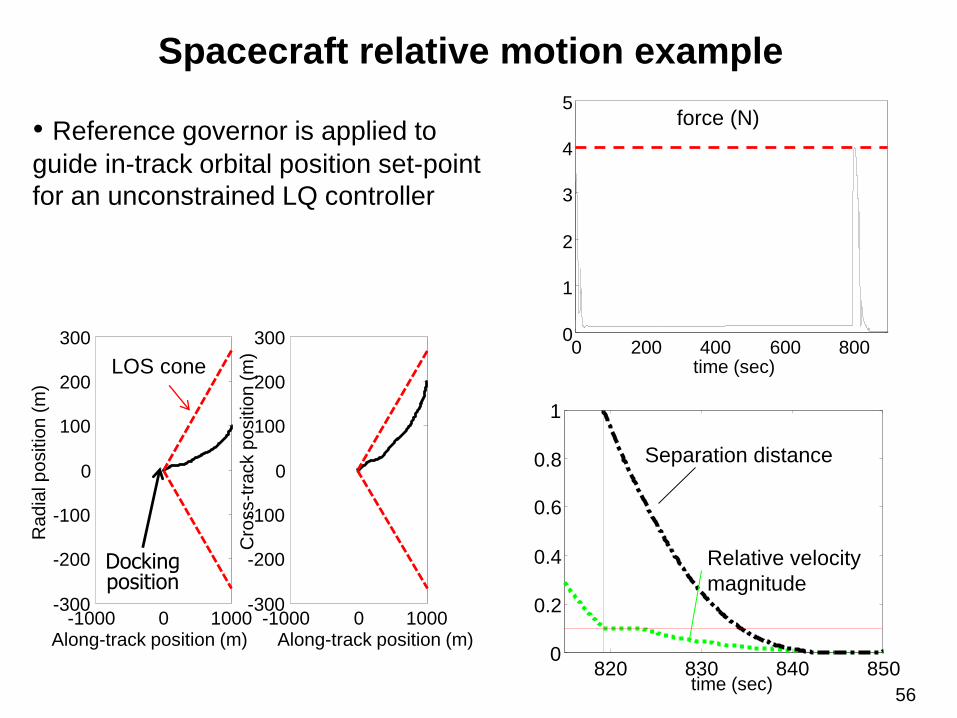
Spacecraft relative motion example
• Dynamic model is linear
• Hill–Clohessy-Wiltshire equations
• Constraints are nonlinear:
• Approach within LOS half-cone in front of
the docking port (convex, quadratic)
• Thrust/delta-v magnitude squared is
limited (convex, quadratic)
• Soft-docking: Small velocity when close to
docking position (Mixed Logical Dynamic
with quadratic 𝑔 and ℎ)
55
Spacecraft relative motion example
-1000 0 1000-300
-200
-100
0
100
200
300
Ra
dia
l p
ositio
n (
m)
Along-track position (m)-1000 0 1000
-300
-200
-100
0
100
200
300
Cro
ss-t
rack p
ositio
n (
m)
Along-track position (m)
• Reference governor is applied to
guide in-track orbital position set-point
for an unconstrained LQ controller
0 200 400 600 8000
1
2
3
4
5
time (sec)LOS cone
Dockingposition
820 830 840 8500
0.2
0.4
0.6
0.8
1
time (sec)
force (N)
Separation distance
Relative velocity
magnitude
56
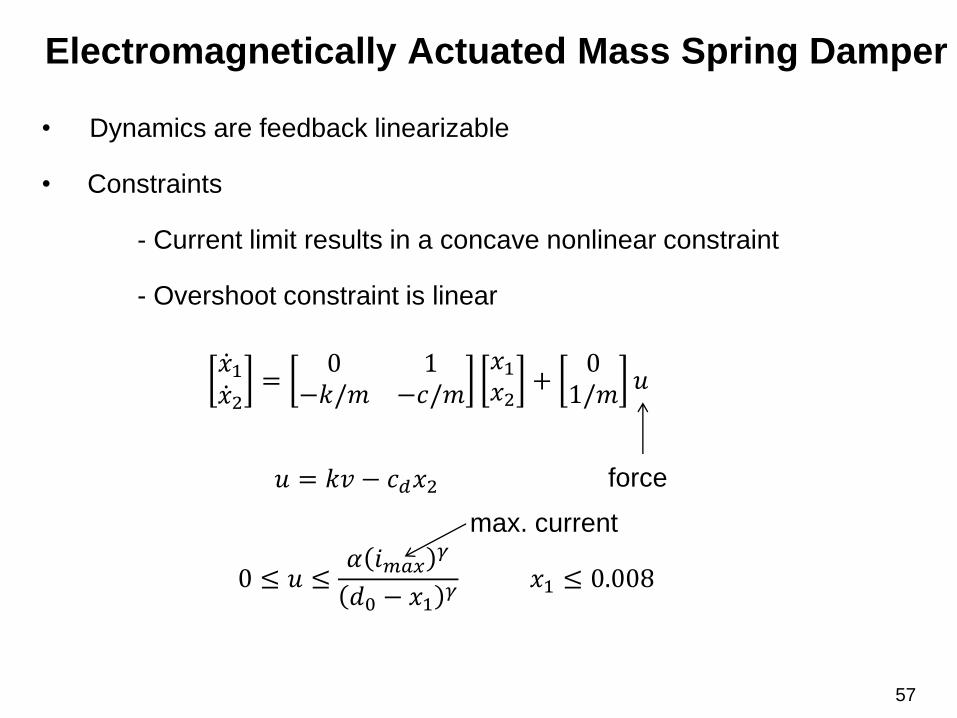
Electromagnetically Actuated Mass Spring Damper
• Dynamics are feedback linearizable
• Constraints
- Current limit results in a concave nonlinear constraint
- Overshoot constraint is linear
ሶ𝑥1ሶ𝑥2
=0 1
−𝑘/𝑚 −𝑐/𝑚
𝑥1𝑥2
+0
1/𝑚𝑢
𝑢 = 𝑘𝑣 − 𝑐𝑑𝑥2
0 ≤ 𝑢 ≤𝛼 𝑖𝑚𝑎𝑥
𝛾
𝑑0 − 𝑥1𝛾
𝑥1 ≤ 0.008
force
max. current
57

Electromagnetically Actuated Mass Spring Damper
0 2 4 60
0.002
0.004
0.006
0.008
0.01
0.012
mass position x1
(m)
time (sec)
unconstrained
imax
=0.5342
imax
=0.365
0 1 2 3 4 50
0.2
0.4
0.6
0.8
current (A)
time (sec)
unconstrained
imax
=0.5342
imax
=0.365
58

Electromagnetically Actuated Mass Spring Damper
• Landing control example
• Voltage limits
• MLD constraints on soft-landing
velocity AND magnetic force
exceeding spring force
𝑑𝑧
𝑑𝑡= 𝑞
𝑑𝑞
𝑑𝑡=
1
𝑚(−𝐹𝑚𝑎𝑔 + 𝑘𝑠 𝑧𝑠 − 𝑧 − 𝑏𝑞)
𝑑𝑖
𝑑𝑡=𝑉𝑐 − 𝑟𝑖 +
2𝑘𝑎𝑖(𝑘𝑏 + 𝑧)2
𝑞
2𝑘𝑠𝑘𝑏 + 𝑧
𝐹𝑚𝑎𝑔 =𝑘𝑎
𝑘𝑏 + 𝑧 2𝑖2
59

Electromagnetically Actuated Mass Spring Damper
60