robotic lunar exploration program. 1.overview 1.1 project objective 1.2 lunar surface reference...
Post on 22-Dec-2015
218 views
TRANSCRIPT

Robotic Lunar Exploration Robotic Lunar Exploration ProgramProgram

1.1. OverviewOverview
1.1 Project Objective1.1 Project Objective
1.2 Lunar Surface Reference 1.2 Lunar Surface Reference Missions: Proposed TasksMissions: Proposed Tasks
1.1 Project Objective1.1 Project Objective Build a robotic prototype, controlled Build a robotic prototype, controlled
autonomously if possible, that will address autonomously if possible, that will address operational issues. operational issues.
It should be able to manipulate and collect It should be able to manipulate and collect soil samples, and dig trenches. soil samples, and dig trenches.
It should have easy adaptability for It should have easy adaptability for unpredicted instruments, repair work, part unpredicted instruments, repair work, part replacement, and all around versatility. replacement, and all around versatility.
It will benefit space exploration by helping It will benefit space exploration by helping build a lunar habitat for astronauts to live build a lunar habitat for astronauts to live and train for other missions, a refueling and train for other missions, a refueling station for ships, as well as future station for ships, as well as future unforeseen projects.unforeseen projects.

1.2 LSRM1.2 LSRM Scientific exploration. Scientific exploration. Determining suitability of MoonDetermining suitability of Moon Developing technology and conducting Developing technology and conducting
tests relevant to long-term human staystests relevant to long-term human stays Developing tests relevant to further Developing tests relevant to further
explorations i.e. Mars and beyondexplorations i.e. Mars and beyond Testing technologies that might lead to Testing technologies that might lead to
economic benefitseconomic benefits Understanding crew health, safety and Understanding crew health, safety and
performance, and effectiveness for long performance, and effectiveness for long stays on the moonstays on the moon
2. Research2. Research2.1 Non-prehensile Manipulation2.1 Non-prehensile Manipulation2.2 Excavation Methods2.2 Excavation Methods2.3 Microcontrollers2.3 Microcontrollers2.4 Other Electrical Research 2.4 Other Electrical Research
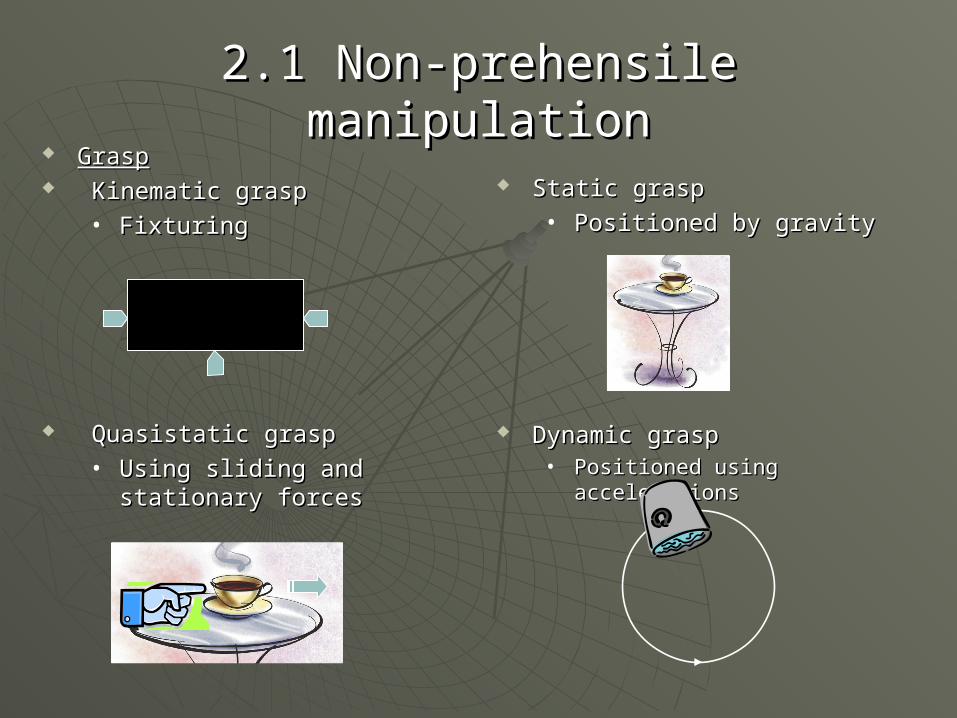
2.1 Non-prehensile manipulation2.1 Non-prehensile manipulation GraspGrasp Kinematic graspKinematic grasp
• FixturingFixturing
Quasistatic graspQuasistatic grasp• Using sliding and Using sliding and
stationary forcesstationary forces
Static graspStatic grasp• Positioned by gravityPositioned by gravity
Dynamic graspDynamic grasp• Positioned using accelerationsPositioned using accelerations

Nonprehensile Palmar Manipulation with a Nonprehensile Palmar Manipulation with a Mobile RobotMobile Robot
By: W.Huang and G.Holden from RPIBy: W.Huang and G.Holden from RPI Huang and Holden used a palmar robot with two Huang and Holden used a palmar robot with two
degrees of freedom to pick up a box sitting on the degrees of freedom to pick up a box sitting on the floor pressed against a wall.floor pressed against a wall.
They used a Kinematic analysis to model the They used a Kinematic analysis to model the interaction between the box and the palm of the interaction between the box and the palm of the robot.robot.

Non-prehensile conclusionsNon-prehensile conclusions
Focus on grasp-less manipulation because Focus on grasp-less manipulation because it requires less actuators, allows more it requires less actuators, allows more degrees of freedom, and versatility is degrees of freedom, and versatility is increased overall. increased overall.
The downside is that planning, The downside is that planning, controllability, and programming become controllability, and programming become more complicated.more complicated.

2.2 Excavation Methods2.2 Excavation Methods
In order to set up a permanent habitat on the moon, trenches will need to be dug in order to cover important cables, protecting them from machinery and radiation from the sun.
Building a robotic machine to accomplish this task before astronauts arrive will save money and reduce risks involved.
A backhoe-type autonomous robot is one idea that could be used for many other tasks as well
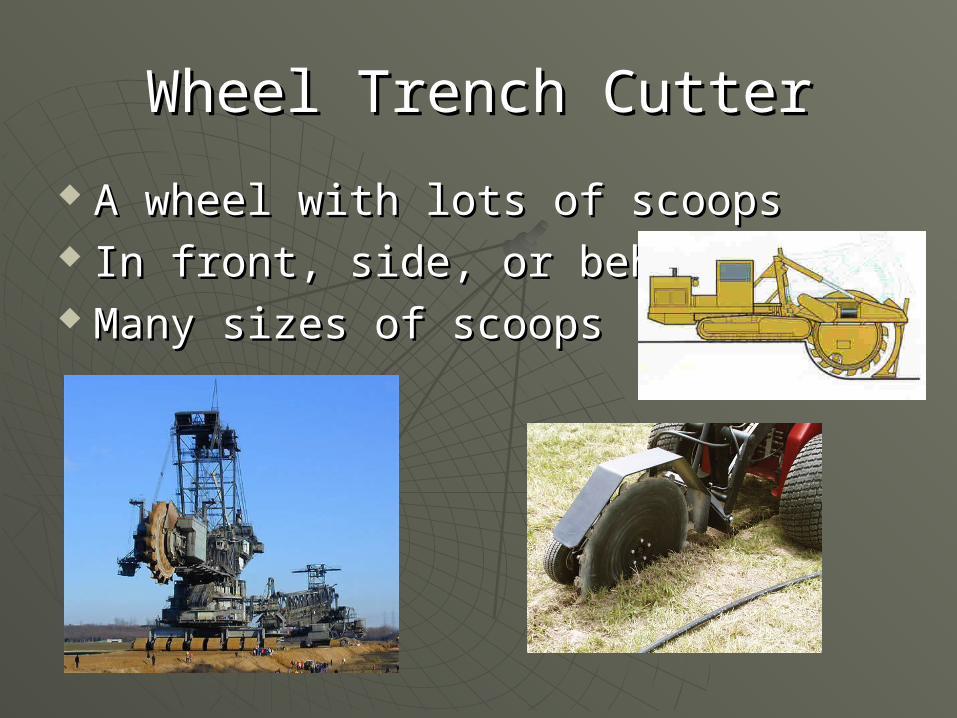
Wheel Trench CutterWheel Trench Cutter
A wheel with lots of scoopsA wheel with lots of scoops In front, side, or behind In front, side, or behind Many sizes of scoopsMany sizes of scoops

Bucket ExcavatorBucket Excavator
Hydraulic arm with scoop attached to Hydraulic arm with scoop attached to the endthe end
Very popularVery popular
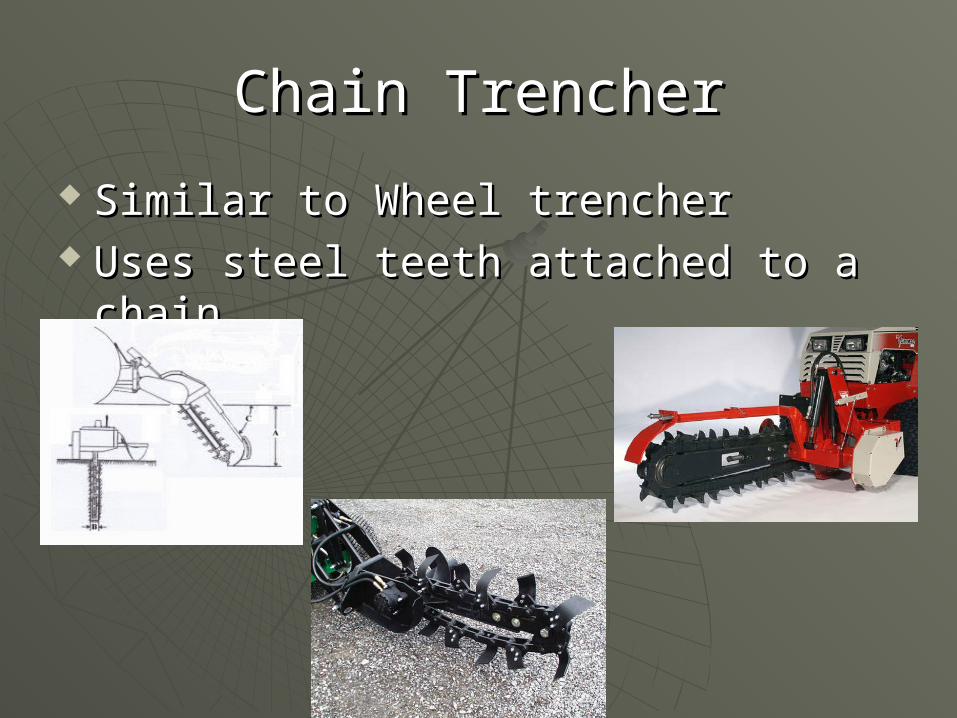
Chain TrencherChain Trencher
Similar to Wheel trencherSimilar to Wheel trencher Uses steel teeth attached to a chainUses steel teeth attached to a chain

Vibratory PlowsVibratory Plows Creates a duct by vertically vibrating Creates a duct by vertically vibrating
a plow blade.a plow blade. Cable is laid into the ductCable is laid into the duct

Excavation ConclusionsExcavation Conclusions
Bucket excavators are versatile but Bucket excavators are versatile but extremely difficult to control.extremely difficult to control.
Trenchers/vibratory plow are very Trenchers/vibratory plow are very task specific and do not offer much task specific and do not offer much versatility.versatility.
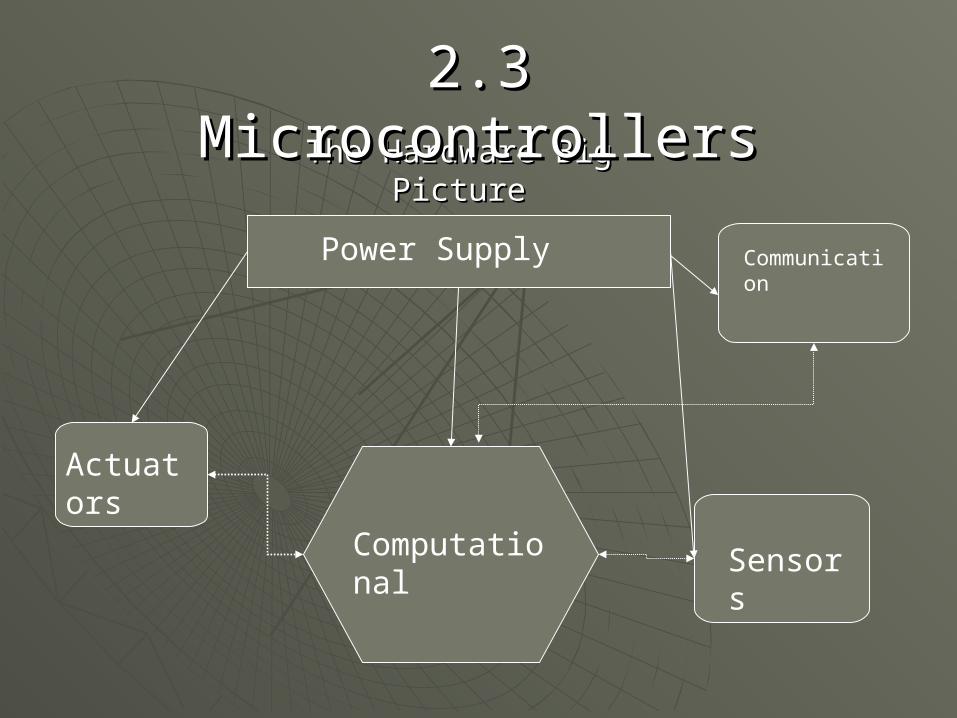
The Hardware Big PictureThe Hardware Big Picture
Computational
Actuators
Communication
Sensors
Power Supply
2.3 Microcontrollers2.3 Microcontrollers
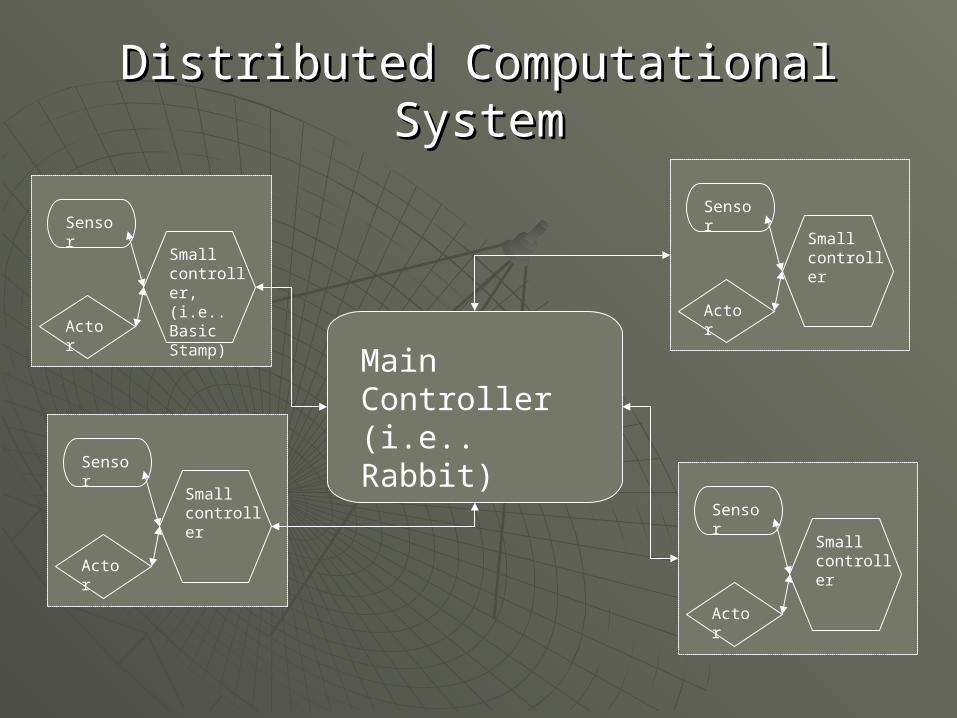
Distributed Computational SystemDistributed Computational System
Main Controller (i.e.. Rabbit)
Small controller, (i.e.. Basic Stamp)
Sensor
Actor
Small controller
Sensor
Actor
Small controller
Sensor
Actor
Small controller
Sensor
Actor

Microcontroller Conclusions Microcontroller Conclusions
Distributed calculation system is better Distributed calculation system is better than one strong and central system than one strong and central system • Redundancy, no real-time operating system Redundancy, no real-time operating system
necessary necessary and available and well supported and available and well supported hardware available at the university hardware available at the university
Use the microcontrollers available at the Use the microcontrollers available at the university university • Supporting persons available, controllers are Supporting persons available, controllers are
cheap and fit our needs, specialized controller cheap and fit our needs, specialized controller would not bring advantages that would over would not bring advantages that would over come increased costcome increased cost
2.4 Other Electrical Research2.4 Other Electrical Research
Autonomous RoboticsAutonomous Robotics Robot VisionRobot Vision NavigationNavigation Inverse KinematicsInverse Kinematics Robotic Control SystemsRobotic Control Systems Decision Making SystemsDecision Making Systems USB InterfaceUSB Interface
3. Design Phase3. Design Phase3.1 Target Specifications3.1 Target Specifications3.2 Tasks3.2 Tasks3.3 Learning Tools3.3 Learning Tools3.4 Field Experience 3.4 Field Experience 3.5 Soil Force Test3.5 Soil Force Test
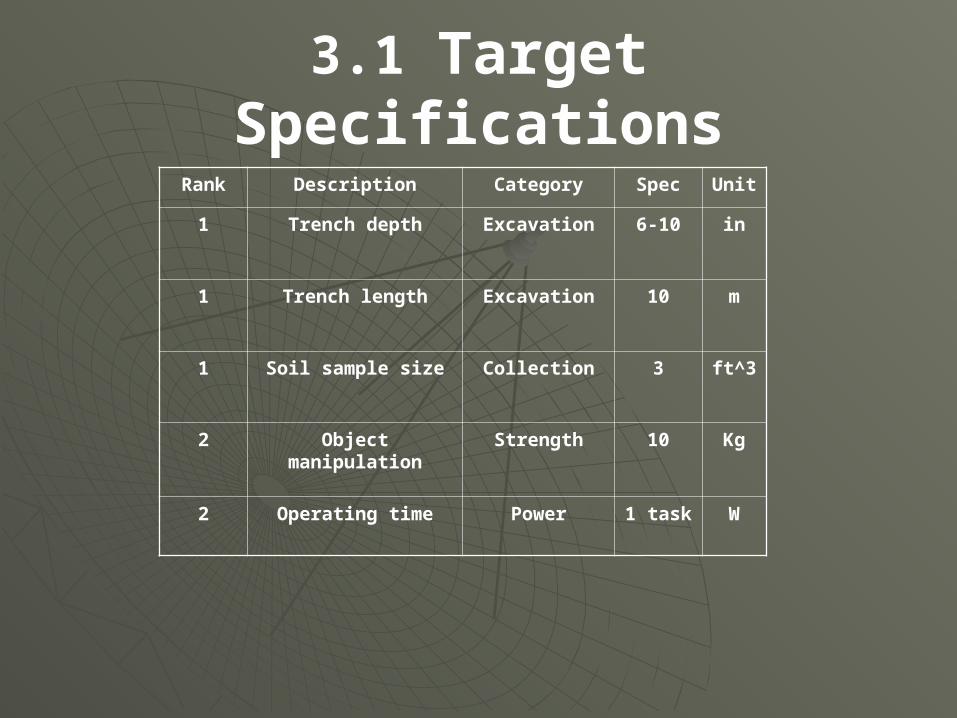
3.1 Target Specifications
Rank Description Category Spec Unit
1 Trench depth Excavation 6-10 in
1 Trench length Excavation 10 m
1 Soil sample size Collection 3 ft^3
2 Object manipulation
Strength 10 Kg
2 Operating time Power 1 task W
3.2 Tasks3.2 Tasks Top 5 in BoldTop 5 in Bold Soil Sample CollectionSoil Sample Collection TrenchingTrenching Cable LayingCable Laying Rock ChippingRock Chipping Soil CompactionSoil Compaction DislodgingDislodging Rock FlippingRock Flipping Path ClearingPath Clearing Soil RelocatingSoil Relocating Rock PushingRock Pushing Soil SiftingSoil Sifting TillingTilling Stake PlantingStake Planting

3.3 Learning Tools3.3 Learning Tools Robotic armRobotic arm
◊ Used to test and visualize motion and Used to test and visualize motion and controllability of proposed designcontrollability of proposed design
◊ Computer interface will allow us to test Computer interface will allow us to test controllability using a programmable set controllability using a programmable set of commands of commands
3.3 Learning Tools3.3 Learning Tools Boe BotBoe Bot
◊ Will give us experience working with Will give us experience working with continuous motion servos, continuous motion servos, microcontrollers, and programmability microcontrollers, and programmability of eachof each
◊ Options to set up our own circuit for Options to set up our own circuit for testing of sensors and other testing of sensors and other motorsmotors
3.4 Field Experience3.4 Field Experience
We took a trip to Northern Idaho to get We took a trip to Northern Idaho to get some hands-on experience with a back-some hands-on experience with a back-hoe.hoe.
We learned that hydraulics are powerful, We learned that hydraulics are powerful, but would be a controls nightmare due to but would be a controls nightmare due to their nonlinear operation.their nonlinear operation.
The Kinematics of an arm with four The Kinematics of an arm with four degrees of freedom would be too difficult degrees of freedom would be too difficult to try to program in a one-year project.to try to program in a one-year project.

Field ExperienceField Experience
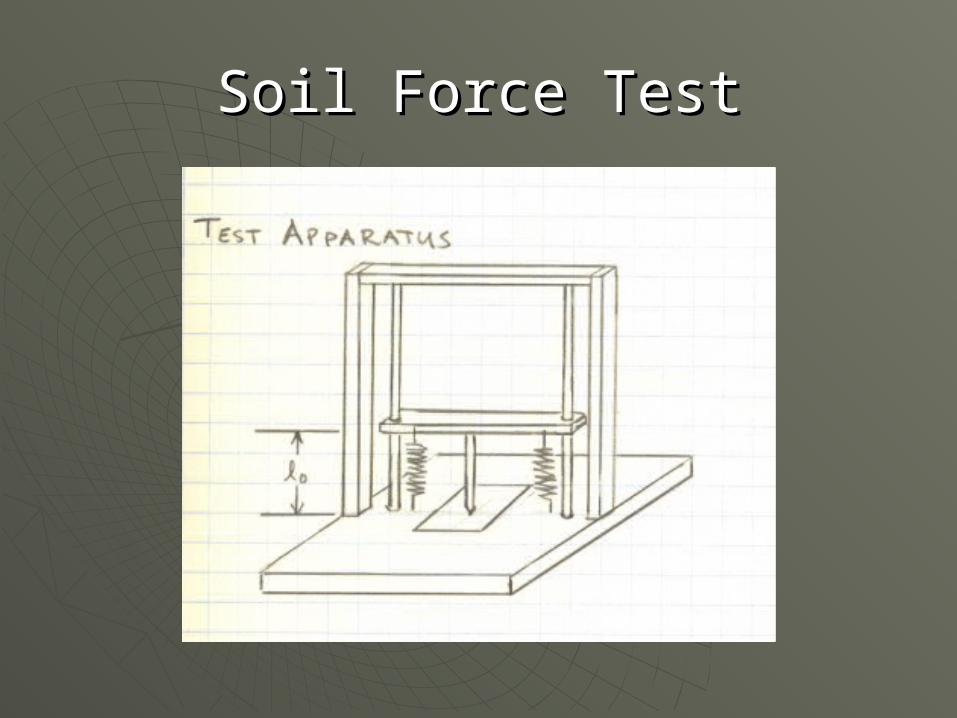
Soil Force TestSoil Force Test

4. Prototypes4. Prototypes4.1 Decision Process4.1 Decision Process4.2 Hole Saw Arm4.2 Hole Saw Arm4.3 Poker/Drill4.3 Poker/Drill4.4 Poker Arm4.4 Poker Arm4.5 Sewing Machine4.5 Sewing Machine4.6 Sandlot Arm4.6 Sandlot Arm

4.1 Decision Process4.1 Decision Process
Prototype Decision Matrix
Aaron Jen Matt Jason Victor Total
Vic's all-n-one 6 7 7 5 8 33
Arm with poker 7 12 11 9 7 46
Bucket 6 10 11 9 6 42
Hole Saw/drill 10 7 9 10 8 44
Vibratory plow 7 9 7 6 9 38
Sewing machine 9 10 10 7 8 44
Sandlot/Spatula 6 9 11 11 9 46
Conveyor belt 5 8 8 9 6 36
Chain Trencher 8 7 7 5 7 34
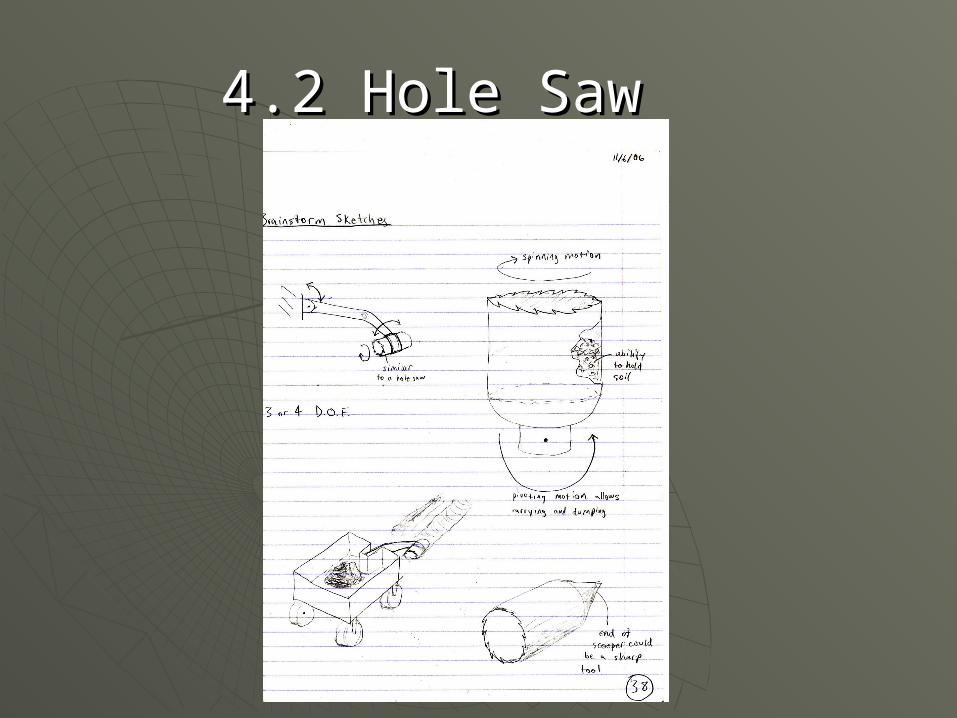
4.2 Hole Saw4.2 Hole Saw

4.3 Poker/Drill4.3 Poker/Drill
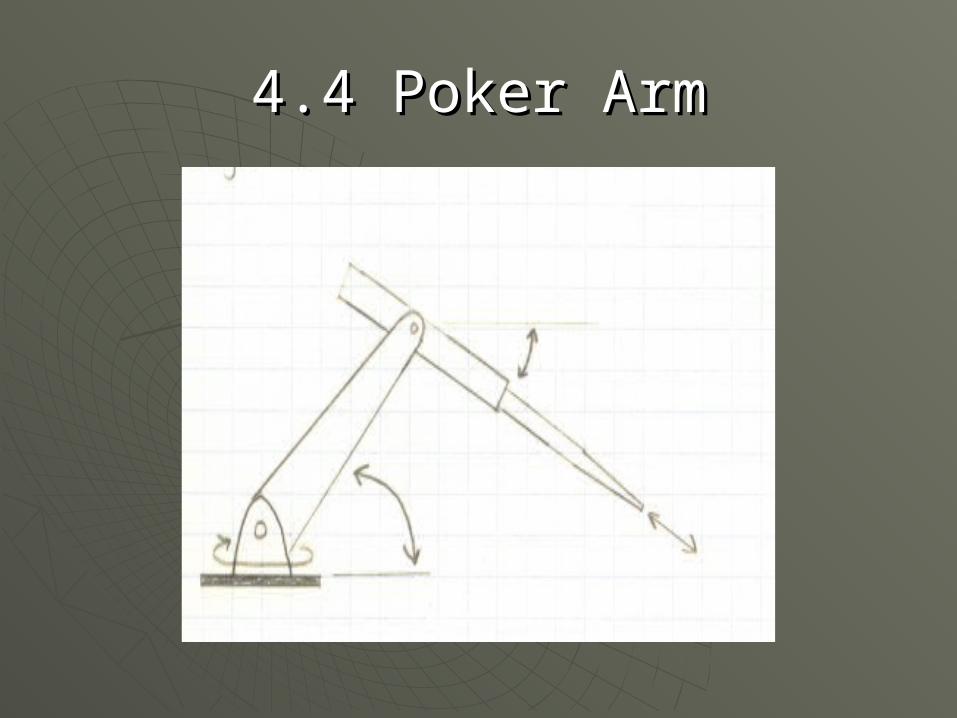
4.4 Poker Arm4.4 Poker Arm
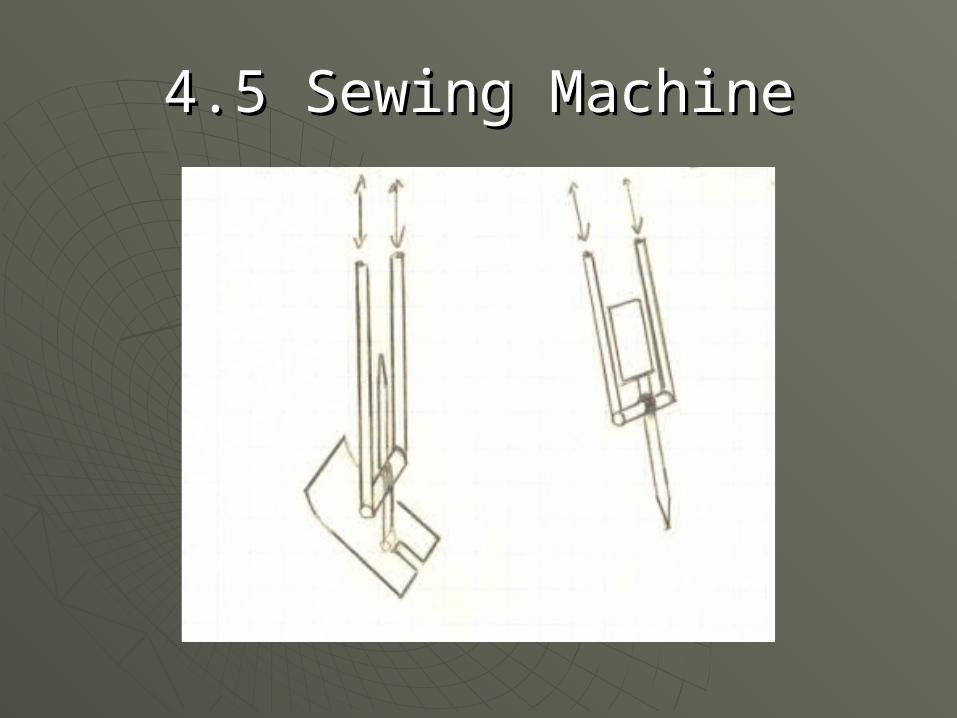
4.5 Sewing Machine4.5 Sewing Machine
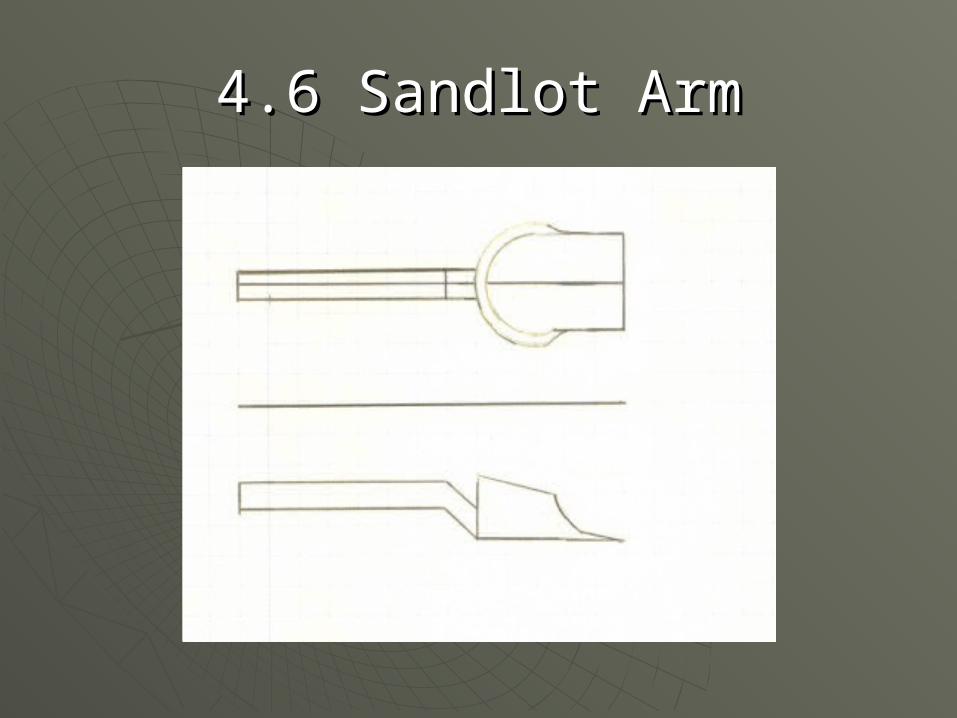
4.6 Sandlot Arm4.6 Sandlot Arm
5. Initial Program Scripts5. Initial Program Scripts5.1 Flip a rock5.1 Flip a rock5.2 Chip a rock5.2 Chip a rock
5.1 Flip a Rock5.1 Flip a Rock
This script uses the Sandlot ArmThis script uses the Sandlot Arm Get to a rockGet to a rock Send out ultrasonic signalSend out ultrasonic signal Receive back ultrasonic signalReceive back ultrasonic signal Use algorithm to calculate distance from robot to rockUse algorithm to calculate distance from robot to rock Lower Sandlot Arm to groundLower Sandlot Arm to ground Use linear motor to extend arm to the rockUse linear motor to extend arm to the rock Use ultrasonic signal and motor encoder signals to verify Use ultrasonic signal and motor encoder signals to verify
arm is at the rockarm is at the rock If arm is at rock, continue; if arm isn’t close enough If arm is at rock, continue; if arm isn’t close enough
move closer and repeat verificationmove closer and repeat verification Raise arm slightly off groundRaise arm slightly off ground Rotate arm 180˚Rotate arm 180˚ Use camera to take picture of flipped rockUse camera to take picture of flipped rock
5.2 Chip a Rock5.2 Chip a Rock
This script uses the Arm PokerThis script uses the Arm Poker Get to a rockGet to a rock Send out ultrasonic signalSend out ultrasonic signal Receive back ultrasonic signalReceive back ultrasonic signal Use algorithm to calculate distance to rockUse algorithm to calculate distance to rock Position Poker Arm so that the poker is above Position Poker Arm so that the poker is above
rockrock Use linear motor to strike down and chip the rockUse linear motor to strike down and chip the rock Repeat strike motion once to make sure rock is Repeat strike motion once to make sure rock is
chippedchipped Use a camera to take a picture of chipped rock.Use a camera to take a picture of chipped rock.
6. Budget6. Budget
Available………………………………………………...Available………………………………………………...$7500$7500
Research and learning……………………………$1000Research and learning……………………………$1000 Prototypes and testing………………………....$1000Prototypes and testing………………………....$1000 Mechanical components and machining..$2000Mechanical components and machining..$2000 Electrical components…………………………….$1500Electrical components…………………………….$1500 Other…………………………………………….…………Other…………………………………………….…………
$500$500