robotics and intelligent systems in support of societyrr.cs.cmu.edu/ieee paper on robotics and is...
TRANSCRIPT

© 2006 IEEE. Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or
for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be
obtained from the IEEE.
For more information, please see www.ieee.org/portal/pages/about/documentation/copyright/polilink.html.
www.computer.org/intelligent
Robotics and Intelligent Systems in Support of Society
Raj Reddy, Carnegie Mellon University
Vol. 21, No. 3 May/June 2006
This material is presented to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works
may not be reposted without the explicit permission of the copyright holder.

24 1541-1672/06/$20.00 © 2006 IEEE IEEE INTELLIGENT SYSTEMSPublished by the IEEE Computer Society
T h e F u t u r e o f A I
Robotics andIntelligent Systems in Support of SocietyRaj Reddy, Carnegie Mellon University
Over the last 50 years, there has been extensive research into robotics and intelli-
gent systems. Although much of the research has targeted specific technical prob-
lems, advances in these areas have led to systems and solutions that will profoundly
impact society. Underlying most of the advances is the unprecedented exponential
Several applications
of robotics and
intelligent systems
could profoundly
impact the well being
of our society,
transforming how we
live, learn, and work.
improvement of information technology. Computerscientists expect the exponential growth of memoryand bandwidth to continue for the next 10 to 20years, leading to terabyte disks and terabytes-per-second bandwidth at a cost of pennies per day (seethe “Technology Trends” sidebar).
The question is, what will we do with all thispower? How will it affect the way we live and work?Many things will hardly change—our social systems,the food we eat, the clothes we wear, our mating rit-uals, and so forth. Others, such as how we learn, work,and interact with others, and the quality and deliveryof healthcare, will change profoundly. Here I presentseveral examples of using intelligent technologies inthe service of humanity. In particular, I briefly dis-cuss the areas of robotics, speech recognition, com-puter vision, human-computer interaction, naturallanguage processing, and artificial intelligence. I alsodiscuss current and potential applications of thesetechnologies that will benefit humanity—particularlythe elderly, poor, sick, and illiterate.
Robotics for elder care and search and rescue
As the life expectancy of the world’s populationincreases, soon over 10 percent of the population willbe over age 70.1 This age group will likely haveminor disabilities impacting its quality of life, whichwe can group into three broad categories: sensory,cognitive, and motor. Fortunately, robotic and intel-ligent systems can remedy these disabilities.
Robots are also paving the way for many rescuemissions, traveling through smoldering ruins to
places rescuers can’t reach. The 9/11 tragedy andrecent hurricanes have showcased the nascent robot-ics technology and the industry attempting to pro-vide tools and systems for data gathering and rescue.
Helping the aging populationA dramatic increase in the elderly population
along with the explosion of nursing-home costsposes extreme challenges to society. Current care forthe elderly is insufficient, and in the future, there willbe fewer young people to help older adults cope withthe challenges of aging.1
Robots for elder care must satisfy several require-ments. Current robots, with their fixed velocities, canfrustrate users. We need robots that can keep pacewith the subject, moving neither too fast nor too slow.Safety while navigating in the presence of an elderlyperson is also important. Given the limitations of cur-rent vision systems, an eldercare robot might notalways detect obstacles beyond its field of view andcould accidentally hit a person. Also, the robot mustbe able to understand and respond to voice com-mands. Current speech recognition and synthesistechnologies are sufficient to make this possible, butseveral problems exist, such as not being able to com-prehend a continuous open-domain speech consist-ing of confusing words, having trouble followingwho is speaking when multiple people are presentfor the conversation, and not being able to block outenvironmental noise.
The Pearl Robot, originally developed at CarnegieMellon University (CMU) and currently being usedfor research by Martha Pollack at the University of
Michigan,2 has been demonstrated in severalassistive-care situations (see figure 1a). Pearlprovides a research platform to test a rangeof ideas for assisting the elderly. Two IntelPentium 4 processor-based PCs run softwareto endow her with wit and the ability to nav-igate, and a differential drive system propelsher. A Wi-Fi network connection helps hercommunicate as she rolls along, while laserrange finders, stereo camera systems, andsonar sensors guide her around obstructions.Microphones help her recognize words, andspeakers enable others to hear her synthesizedspeech. An actuated head unit swivels in life-like animation.
Currently, Pearl can trek across carpetsand kitchen floors, and she includes a hand-held device that prompts people to do certain(preprogrammed) things. She also acts as awalker, guiding people through pathways.Researchers hope that such autonomousmobile robots will have endless possibilitiesand one day live in the homes of chronicallyill elderly people to perform a variety oftasks,3 such as
• monitoring people and reminding them tovisit the bathroom, take medicine, drink,or see the doctor (see figure 1b).
• connecting patients with caregiversthrough the Internet. The robot is a plat-
form for telepresence technology wherebyprofessional caregivers can interact directlywith remote patients, reducing the fre-quency of doctor visits.
• collecting data and monitoring patient well-
MAY/JUNE 2006 www.computer.org/intelligent 25
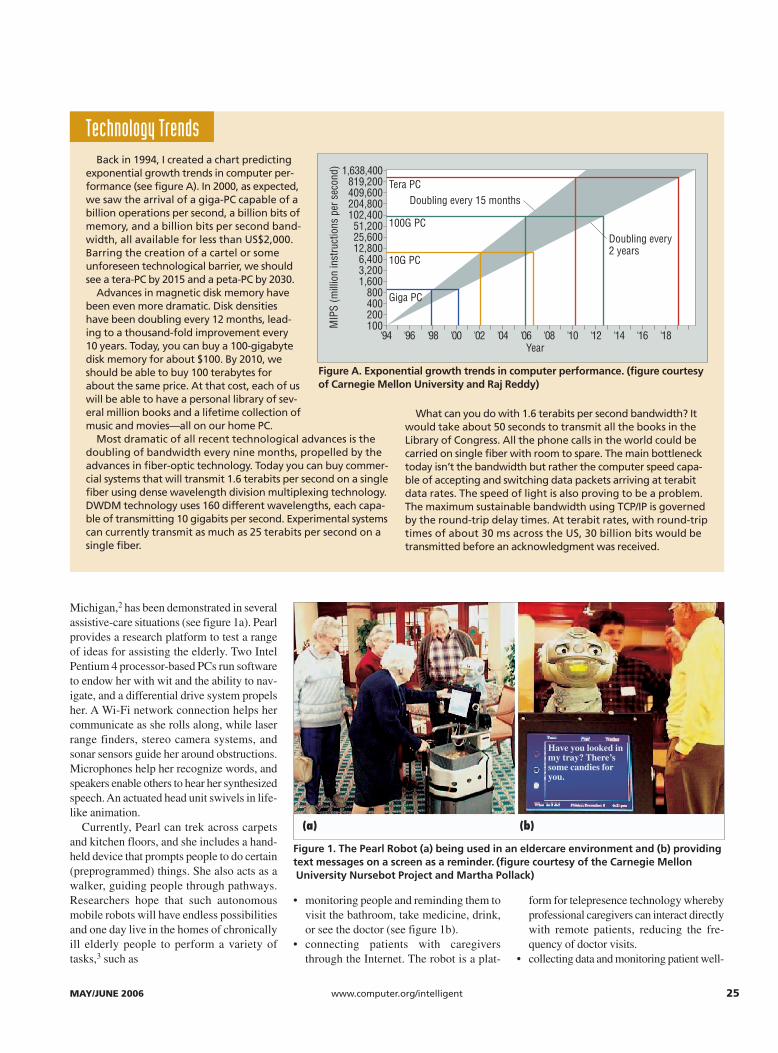
Back in 1994, I created a chart predictingexponential growth trends in computer per-formance (see figure A). In 2000, as expected,we saw the arrival of a giga-PC capable of abillion operations per second, a billion bits ofmemory, and a billion bits per second band-width, all available for less than US$2,000.Barring the creation of a cartel or someunforeseen technological barrier, we shouldsee a tera-PC by 2015 and a peta-PC by 2030.
Advances in magnetic disk memory havebeen even more dramatic. Disk densitieshave been doubling every 12 months, lead-ing to a thousand-fold improvement every10 years. Today, you can buy a 100-gigabytedisk memory for about $100. By 2010, weshould be able to buy 100 terabytes forabout the same price. At that cost, each of uswill be able to have a personal library of sev-eral million books and a lifetime collection ofmusic and movies—all on our home PC.
Most dramatic of all recent technological advances is thedoubling of bandwidth every nine months, propelled by theadvances in fiber-optic technology. Today you can buy commer-cial systems that will transmit 1.6 terabits per second on a singlefiber using dense wavelength division multiplexing technology.DWDM technology uses 160 different wavelengths, each capa-ble of transmitting 10 gigabits per second. Experimental systemscan currently transmit as much as 25 terabits per second on asingle fiber.
What can you do with 1.6 terabits per second bandwidth? Itwould take about 50 seconds to transmit all the books in theLibrary of Congress. All the phone calls in the world could becarried on single fiber with room to spare. The main bottlenecktoday isn’t the bandwidth but rather the computer speed capa-ble of accepting and switching data packets arriving at terabitdata rates. The speed of light is also proving to be a problem.The maximum sustainable bandwidth using TCP/IP is governedby the round-trip delay times. At terabit rates, with round-triptimes of about 30 ms across the US, 30 billion bits would betransmitted before an acknowledgment was received.
Technology Trends
'95 '97 '99 '01 '03 '05 '07 '09 '11 '13 '15 '17 '19
1,638,400819,200409,600204,800102,40051,20025,60012,8006,4003,2001,600
800400200100M
IPS
(mill
ion
inst
ruct
ions
per
sec
ond)
'94 '96 '98 '00 '02 '04 '06 '08 '10 '12 '14 '16 '18Year
Tera PCDoubling every 15 months
100G PC
10G PC
Giga PC
Doubling every2 years
Figure A. Exponential growth trends in computer performance. (figure courtesyof Carnegie Mellon University and Raj Reddy)
Figure 1. The Pearl Robot (a) being used in an eldercare environment and (b) providingtext messages on a screen as a reminder. (figure courtesy of the Carnegie MellonUniversity Nursebot Project and Martha Pollack)
(a) (b)
Have you looked inmy tray? There’ssome candies foryou.

being. Emergency conditions, such as heartfailure or high blood-sugar levels, can beavoided with systematic data collection.
• operating appliances around the homesuch as the refrigerator, washing machine,or microwave.
• taking over certain social functions. Manyelderly people are forced to live alone,deprived of social contacts. The robotmight help people feel less isolated.
Although Pearl can’t yet perform suchtasks, she’s a one of a kind costing close toUS$100,000. To ready a mass-market ver-sion of the automaton that would be usefulfor the elderly, researchers must address thelist of desirables just presented as well asovercome a rash of software and hardwareissues, such as battery power and Pearl’sinability to navigate stairs.
Furthermore, to act as a telepresence sys-tem, Pearl should be able to offer the caregiverdetailed status reports about the elder’s dailyactivities, such as whether the patient took thecorrect medicine and ate his or her meals. Thesystem should be able to monitor people andreact to unusual behavior patterns—for exam-ple, alerting the caregiver if a person hasn’tmoved from a chair for a long time.
Also, Pearl currently uses simple textstrings for patient reminders, but as an elder’scognitive capacities diminish or during peri-ods of illness, the person might require moredetailed reminders. The system should beable to monitor the elder’s needs and dis-tribute intelligent reminders based on para-meters such as time of day, timing of the pre-vious interactions, the user’s mood, andrequired user actions. Finally, future robotsshould be capable of picking up or movingthings for the user.
As a society, we must find alternative ways
of providing care to the elderly and chroni-cally ill, providing them with the dignity theydeserve. Technological advances will nodoubt make such eldercare robots availablecommercially in the near future.
Robotics for rescue Natural and manmade disasters lead to
unique requirements for effective collabora-tion of human and robotic systems. Oftendisaster locations are too dangerous forhuman exploration or are unreachable. Addi-tional constraints such as the availability ofrescuers, extreme temperatures, and hurri-cane-force winds result in significant delaysbefore human rescuers can start searching forvictims. In most cases, rescuers need toretrieve victims within 48 hours to enhancesurvival rates.
Disasters in the last decade showed thatadvances such as earthquake prediction arenot enough. For example, the 1995 Kobeearthquake destroyed several large struc-tures—including buildings and highwaysbelieved to be earthquake proof. In bothKobe and in the Oklahoma bombing case,human rescue efforts alone weren’t enough,resulting in unnecessary loss of life. Thehuge robots available at the time couldn’tmaneuver in the rubble or be used effectively.
Lessons learned from these and other res-cue situations motivated further researcharound the world, leading to the creation ofsmall, light, and cheap rescue robots.4 Todayseveral organizations are actively participat-ing in designing small rescue robots that cancarry a human-sized payload. Some systemscan maneuver over land and air and detectsounds. Many of the robots have cameraswith 360-degree rotation that can send backhigh-resolution images. Some rescue robotsare equipped with specialized sensors thatcan detect body heat or colored clothing.
Figure 2 shows the VGTV Xtreme, Ameri-can Standard Robotics’commercially available14-pound rescue robot (see www.asrobotics.com/products/vgtv_xtreme.html). Unlike theprevious generation’s laboratory systems,this rescue robot’s system is durable and flex-ible and can stand up to a beating in the field.Current models of the VGTV Xtreme robothave more ground clearance, so they canmore easily go over rubble piles. Camerashave longer zoom lenses, so the robots don’thave to journey as far into a structure to pro-vide searchers with high-resolution images,Operator controls have been improved andare compatible with the rescuers’equipment
and gloves. Also, the robots are waterproof,so decontamination is easier.
Rescue robots are highly invaluable in dis-aster relief efforts, and this particular area ofrobotics has received much attention in thelast few decades. Several rescue robots existtoday with varying capabilities suited to spe-cific domains. The VGTV Xtreme robots cantravel hundreds of feet autonomously. Otherrescue robots, such as CMU’s snake robot,help assess contamination at waste storagesites or search for land mines (see the“Robotics for Land Mine Detection” side-bar). The military has used similarly smalland durable tactical mobile robots calledPackBots to explore Afghan caves. Also,since 2000, the American Association forArtificial Intelligence has conducted anannual rescue robot competition to identifythe capabilities and limitations of existingrescue robots (see http://palantir.swarthmore.edu/aaai06).
Continued research and development isneeded to enhance rescue robotic systems andeliminate their limitations. It’s difficult to buildrobust rescue robots that can deal with a dis-aster site’s unexpected complexity. For exam-ple, the robots must be adaptable to water-clogged dark mines, collapsed building rubble,water-clogged pipes, and so forth. Also, therobots should be able to adjust to lighting andbe resistant to extreme temperatures such as ina volcano or on an icy mountain.
A limitation observed in robot rescueefforts at the World Trade Center was that therobots couldn’t go very far into the rubblebecause of short tether. At present, teleoper-ation from remote sites is often limited toabout 100 feet from the disaster site. Next-generation robots must address issues suchas sensor, power, and commuting limitationsand long set-up times.
Furthermore, large-scale, affordable, andefficient deployment of these robots demandsincreased participation and awareness fromrelevant government agencies. We not onlymust improve the technology and researchinfrastructure but also train a work force offirst responders who can effectively use suchsystems.
Speech recognition: The reading tutor
Over a billion people in the world can’t reador write (see www.literacyonline.org/explorer/overview.html), and it’s likely that as many astwo billion are functionally illiterate in thatthey can’t understand the meaning of the sen-
T h e F u t u r e o f A I
26 www.computer.org/intelligent IEEE INTELLIGENT SYSTEMS
Figure 2. The VGTV Xtreme rescue robot.(figure courtesy of American StandardRobotics)

tences they read. Advances in speech-recog-nition and synthesis technologies provide anopportunity to create a computer-based solu-tion to illiteracy. The solution involves an auto-mated reading tutor that displays stories on acomputer screen and listens to children readaloud using speech-recognition technology.
Until 10 years ago, speech recognition sys-tems weren’t fast enough to recognize theconnected sentences spoken in real time. Areading tutor application that can discoverand correct mispronunciations requires notmerely speech-recognition capabilities; itmust also be able to detect deviations instress, duration, and spectral properties fromthat of native speakers.
Figure 3 shows the Reading Tutor, devel-oped by CMU’s Jack Mostow.5 The ReadingTutor lets the child choose from a menu ofhigh-interest stories from Weekly Reader andother sources, including user-authored stories.It adapts CMU’s Sphinx speech-recognitionsystem to analyze the student’s oral reading.The Reading Tutor intervenes when the readermakes mistakes, gets stuck, clicks for help, oris likely to encounter difficulty. It respondswith assistance modeled after expert readingteachers but adapted to the technology’s capa-bilities and limitations. The current version
runs on Windows XP on a PC with at least 128Mbytes of memory. Although it’s not yet acommercial product, hundreds of children
have used the Reading Tutor daily as part ofstudy to test its effectiveness.6
To fully realize this technology’s poten-
MAY/JUNE 2006 www.computer.org/intelligent 27
Around 60 to 100 million land mines infest over 60 countriesfollowing a century of conflicts. The presence of these mineshas devastating consequences for the civilian populations,resulting in millions of acres of land that can’t be reclaimed.Thousands of innocent people are maimed or killed every yearin land-mine accidents.
Currently, most land-mine detection is done manually, usingmetallic and other types of sensors (see figure B1). Often, the sen-sor indicates the presence of metal when there is none, leading tofalse alarms. Even worse, with the proliferation of mines with lit-tle to no metallic content, the use of the classical metal detector islimited. For every 5,000 mines removed, one deminer is killed or
maimed. More sophisticated techniques are needed, and roboticstechnologies offer a unique opportunity to create a safe solution.
Autonomous robots equipped with appropriate sensors cansystematically search a given area and mark all potential landmine areas, leading to significantly higher detection rates andfewer casualties (see figure B2). Newer sensors such as quadru-ple resonance and explosive odor detectors called “sniffers”should be available in a few years. Quadruple resonance, aradio-frequency imaging technique similar to an MRI but with-out the large external magnet, is a promising technologicalalternatives. Aerial electronic sniffers can rapidly detect theabsence or presence of mines.
Robotics for Land-Mine Detection
Figure B. (1) General land-mine detection and (2) autonomous robots for land-mine detection.
(1) (2)
Figure 3. A student using the Reading Tutor in Ghana. (figure courtesy of CMU andJack Mostow)

tial, we must reduce speech-recognitionerrors and develop systems that can under-stand nonnative speakers, local dialects, andthe speech of children. We must also trackuser engagement using response times andenable the system to propose a mentoringapproach for a specific student by modelingthat student’s behavior.
Computer vision and intelligentcruise control
Over a million people die annually in roadtraffic fatalities—40,000 in the US alone.7 Theannual repair bill for the cars involved in theseaccidents in the US exceeds over $55 billion.Sensing, planning, and control technologiesmade possible by advances in computer visionand intelligent systems could reduce deathsand repair costs by a significant percent.
Forty percent of vehicle crashes can beattributed in some form to reduced visibilitydue to lighting and weather conditions.8
Physical sensors could alert a driver whenglare, fog, or artificial light exists in the envi-ronment. Furthermore, over 70 percent ofaccidents are caused by human drivingerrors—usually speeding, driver fatigue, ordrunk driving.9 An autopilot that could tem-porarily control the vehicle in such situationsand navigate it to safety could dramaticallyreduce casualties. However, this wouldrequire dependable sensitivity and percep-tion—a key component in building next-gen-eration cruise-control systems.
To accomplish this, we need sensors that
use light, sound, or radio waves to detect andsense the physical environment. These sen-sors could gather data such as the speed, dis-tance, shape, and color of objects surround-ing the vehicle. We then need efficientobject-classification techniques to extract theshape of objects from this sensor data andaccurately classify them based on color. We’dalso require real-time object-tracking sys-tems that can continuously monitor (and pre-dict) the trajectories of these vehicles and dri-vers over time. Based on this information,researchers should be able to develop scene-recognition algorithms that can recognizeinteractions between objects in the environ-ment and extrapolate them to a possible col-lision scenario.
In addition to perception modules, we alsoneed control systems and actuators to steerthe vehicle. We need feedback control sys-tems with proportional control to help thevehicle maintain a constant speed by auto-matically adjusting the throttle based on thecurrent speed. We need efficient path-plan-ning and localization techniques so the vehi-cle can autonomously navigate a set path.
Once these technologies are in place, we’llbe able to build collision-warning systemswith intuitive interfaces that warn drivers ofimminent dangers well in advance. We candesign collision-avoidance and autonomousnavigation systems that can navigate thevehicle around obstacles and dangerous sce-narios without help from the driver.
Such systems could also help reduce traf-
fic. The Texas Transportation Institute esti-mates that in 2000 alone, major US citiesexperienced 3.6 billion hours of total delayand 5.7 billion liters of wasted fuel.10 Thisresulted in an aggregate of $67.5 billion inlost productivity.10 Excessive braking due todriver panic or minor miscalculations causedmany of these jams. Such irregular drivingnot only disrupts traffic flow but also causesdiscomfort for passengers. Also, when dri-vers maintain a large distance between theirvehicle and the one in front of them, they sig-nificantly underutilize the road. Intelligentcruise-control systems that regulate vehiclespeed based on time-to-collision could helpus avoid many of these problems. A majorityof these traffic jams could be prevented if amere 20 percent of vehicles on the road usedadaptive cruise control.11
The Vision and Autonomous SystemsCenter at the CMU is building collision-warning systems for transit buses that useshort-range sensors to detect and warn thedriver of frontal and side collisions.
Furthermore, CMU’s Field Robotics Cen-ter has developed Navlab vehicles that canautonomously operate at highway speeds forextended periods of time (see figure 4).12
These vehicles are equipped with perceptionmodules to sense and recognize the sur-rounding environment.
A Navlab vehicle can detect and trackcurbs using a combination of lasers, radar,and cameras. The vehicle can project a curb’slocation onto the visual image of the road andprocess the image to generate a template ofthe curb’s appearance. Tracking the curb inthe image as the vehicle moves lets the sys-tem generate a preview of the curb and road’spath. Accordingly, the vehicles can differen-tiate between objects on the road and thoseon the side of the road, so they can safelynegotiate turns.
Navlab builds a map of the environmentand tracks moving objects. It also scans a sin-gle line across the scene periodically usingradio waves and laser beams. As long as thevehicle doesn’t move too irregularly, it cantrack moving objects from frame to frame asthe vehicle moves. Given the locations of themoving and fixed objects, and the headingdirection of the vehicle, it’s possible to esti-mate the time-to-collision for each object.Stereo-vision systems obtain 3D informationfrom a scene to detect and track pedestrians.
Drive-by-wire is another recent technol-ogy that has made it easy to implementautonomous control in next-generation vehi-
T h e F u t u r e o f A I
28 www.computer.org/intelligent IEEE INTELLIGENT SYSTEMS
Figure 4. A Navlab vehicle developed at Carnegie Mellon University can autonomouslyoperate at high speeds for an extended period of time. (figure courtesy of CMU andRed Whittaker)

cles, such as Navlab. The idea is to delink thevehicle’s mechanical controls from the actualoperation of the associated devices. Mechan-ical movement of the accelerator, steering,brake, clutch, or gear controls generate dif-ferent electric signals depending on theamount of pressure applied. The signals aresent to a central computer, which uses presetinstructions to control the vehicle accord-ingly. Drive-by-wire eliminates humanerrors, such as pressing the accelerator toohard or the clutch too lightly. At the sametime, it also optimizes fuel delivery. As aresult, vehicles are safer to drive and moreeconomical to maintain. It also makes dri-ving more convenient because it optimizescruise control and gear shifting.
The Grand Challenge race organized byDARPA illustrates current technology for fullyautonomous driving capabilities. Five teamscompleted the Grand Challenge in 2005; fourof them under the 10-hour limit. StanfordUniversity’s Stanley took the prize with awinning time of 6 hours, 53 minutes.
Although these technologies have beendemonstrated at CMU and other research lab-oratories for more than 20 years, legal, regu-latory, and reliability considerations have heldback their rapid adoption. I hope that compa-nies in collaboration with researchers willmake accident-avoiding cruise-control sys-tems affordable and accessible.
Human-computer interaction Four billion people in the world subsist on
less than $2000 per year.13 Most of them don’tknow English and more than a billion are une-ducated. Yet most PC designers assume thatthe user knows English (or a few other lan-guages of industrial nations). Thus, it’s notnecessarily the technology that’s the barrierto wide acceptability of and accessibility tocomputers, but rather companies that targettheir designs at affluent and literate con-sumers in industrial nations. Anyone can learnto use a TV or telephone or learn to drive acar, even though these are arguably some ofthe more complex technologies invented bysociety. The secret is to hide the complexityunder a radically simple interface
At CMU, we’ve developed the PCtvt, a mul-tifunction information appliance that primarilyfunctions as an entertainment and communi-cation device (see figure 5). It can be used as aTV, a DVR, a video phone, an IP phone, or aPC. To improve global accessibility, the sys-tem uses an iconic and a voice-based interface.It takes less than one minute to learn to use it(like turning on a TV set and choosing a chan-nel), requires only two or three steps, and canbe operated using a TV remote.
The basic technologies to add multimediafunctionality to a PC have been around forover 15 years. By adding a TV tuner chip, aPC can become a TV and DVR. Adding acamera and microphone permits video andaudio inputs, which enable telephone func-tionality (using voice-over-IP protocols) aswell as video phone, video conferencing, andvideo and voice email—capabilities cur-
rently unavailable to most users even inindustrial countries. The key improvement isto insist on a radically simple user interfacethat doesn’t require literacy—what we callan appliance model.
So, even if users can’t read or write, theycan easily learn to use voice or video mail. Ifthey can’t use a text-based help system, theycan benefit from the video chat. Of course,such solutions demand more bandwidth,computation, and memory, which present aninteresting conundrum. To be useful andaffordable for those who are poor and illiter-ate, we need a PC with 100 times more com-puting power at one-tenth the cost.
There are no technological reasons why wecan’t provide increased memory and band-width at a nominal cost. Projected exponen-tial growth in computing and communicationtechnologies should make this possible. It’sa research challenge that is worth undertakingnot only as an ecotechnology but also as goodbusiness. It would open up the large untappedcustomer base in emerging markets.
Natural language processingNatural language processing provides tools
for indexing and retrieval, translation, sum-marization, document clustering, and topictracking, among others.14 Taken together,such tools will be essential for successfullyusing the vast amount of information beingadded to digital libraries.
Although basic technologies and tools fornatural language processing have been demon-
MAY/JUNE 2006 www.computer.org/intelligent 29
Figure 5. The PCtvt, a multifunction information appliance: (a) to watch TV, the user clicks on the picture of the TV and then selects achannel; (b) for the video phone, the user clicks on the video-phone picture and then selects one of the faces. (figure courtesy ofCMU and Raj Reddy)
(a) (b)

strated for the English language, the neces-sary linguistic support isn’t yet available inmany other languages. As a result, automatictranslation and summarization among manylanguages isn’t yet satisfactory. We mustdevelop low-cost, quick, and reliable methodsfor producing language-processing systemsfor many languages of low commercial inter-est. Natural language processing systems mustbetter understand, interpret, and resolve ambi-guity in language. We must resolve ambigui-ties at the lexical, syntactic, semantic, and con-textual levels to generate better-quality output.Also, most language-processing systems arecomputationally intensive, so we need effec-tive ways of redesigning these systems toscale up in real time.
The first step to realizing such ambitiousgoals in natural language processing is to cre-ate a rich digital content repository. Manyinitiatives have begun to act as a testbed forvalidating concepts of natural languageresearch. One such project is CMU’s MillionBook Digital Library Project, a collaborativeventure among many countries including theUS, China, and India. So far, over 400,000books have been scanned in China and200,000 in India. Content is made availablefreely from multiple sites around the globe(see www.ulib.org for a sampling of this col-lection). Figure 6 provides the cover page ofa book in Sanskrit that has been digitized forfree access to everyone.
Google, Yahoo, and Microsoft have all
announced their intention to scan and makeavailable books of interest to the public.Unfortunately, most of these will be in Eng-lish and thus won’t be readable by over 80percent of the world’s population. Even whenbooks in other languages become availableonline, their content will remain incompre-hensible to many people. Natural languageprocessing technology for translation amonglanguages isn’t perfect, but it promises toprovide a way out of this conundrum. Aresource like a universal digital library, sup-ported by natural language processing tech-niques, furthers the democratization ofknowledge by making digital libraries usableand available to scholars around the world.
Furthermore, having millions of booksaccessible online creates an information over-load. Our late colleague at CMU, Nobel Lau-reate Herbert Simon used to say, “We have awealth of information and scarcity of (human)attention!” Online multilingual search tech-nology provides a way out. It lets users searchvery large databases quickly and reliably inde-pendent of language and location, enhancingaccessibility to relevant information. Addi-tionally, machine-translation systems such asCMU’s AVENUE project aim to find quick, low-cost methods for developing machine-trans-lation systems for minority or endangered lan-guages. Also, question-answering systemssuch as IBM’s REQUEST provide natural lan-guage interfaces to information systems.Speech interfaces that use speech-recognition
and synthesis systems will let the physicallychallenged, elderly, and uneducated benefitfrom online data.
Rapid access to relevant information andknowledge has become so important to soci-ety that that it has spawned a $100 billionsearch industry in the form of Google,Yahoo,and MSN. However, a lot of informationexists in nondigital, multilingual formats thatwe must capture, preserve, and provide tousers. Natural language processing tech-niques will help immensely as an indispens-able front-end interface to such repositoriesof multilingual information. As more infor-mation becomes searchable, findable, andprocessable online, as Google Print and othersuch projects intend, we can expect digitallibraries and natural language processing tobecome the most used technology of all.
Artificial intelligenceIn many developing countries, neonatal
care isn’t readily available to many newbornchildren because hospitals are inaccessibleand costly. The causes of many newborndeaths—infection, birth asphyxia or trauma,prematurity, and hypothermia—are pre-ventable. The underlying issues include poorprepregnancy health, inadequate care duringpregnancy and delivery, low birth weight,breast-feeding problems, and inadequatenewborn and postpartum care.
Currently, village health workers trainedin neonatal care make home visits to controldiarrheal diseases and acute respiratoryinfection, offer immunizations, and providebetter nutrition through micronutrients andcommunity awareness. Unfortunately, scal-ability and sustainability have been prob-lems, including ready access to a healthworker, identifying and training health work-ers, and providing support and medicines ina timely manner.
Many believe that the poor, sick, and une-ducated masses on the other side of the ruraldigital divide have more to gain from infor-mation and communication technologies thanthe billion people who already enjoy this tech-nology.15 Specifically, artificial intelligence-based approaches such as expert systems andknowledge-based systems that have beenused in medical diagnosis and therapy appli-cations since 1970s might also prove to beeffective in the developing world and providetimely intervention, saving lives and money.
One such example is the Vienna ExpertSystem for Parenteral Nutrition of Neonates(VIE-PNN; www.ai.univie.ac.at/imkai/kbs/
T h e F u t u r e o f A I
30 www.computer.org/intelligent IEEE INTELLIGENT SYSTEMS
Figure 6. The cover page of Sanskrit book Rig-Veda that was digitized in the CMU’sMillion Book Project. (figure courtesy of CMU and Raj Reddy)

vie-pnn.html). Planning adequate nutritionalsupport is a tedious and time-consuming cal-culation that requires practical expert knowl-edge and involves the risk of introducing pos-sibly fatal errors. VIE-PNN aims to avoiderrors within certain limits, save time, andkeep data for further statistical analysis. Thesystem calculates daily fluid, electrolyte, vit-amin, and nutrition requirements accordingto estimated needs as well as the patient’sbody weight, age, and clinical conditions(such as specific diseases and past and pre-sent-day blood analysis).
Creating an expert system for neonatalcare in rural environments is perhaps a hun-dred times more difficult. The cost of usemust be pennies rather than dollars, and sev-eral technical challenges exist. First, we needan information appliance that can host anexpert system and engage in a dialog with avillage housewife in a spoken local language(cell phones should be powerful enough toprovide this functionality within a few years).We also must develop recognition, synthe-sis, and dialog systems for local languages.
Second, we must create an expert systemwith a database of answers to common prob-lems, in the form of voice and videoresponses as well as text. When an answerisn’t available locally, the user should be ableto search a global database with more com-prehensive frequently asked questions andanswers. This in turn requires multilingualsearch and translation. If all else fails, thequery should be referred to a human-experttask force for generating an answer forimmediate and future use.
Finally, we must provide the necessarytherapy. For example, it’s not enough to tellAIDS patients that they need a three-drugcocktail. We must also tell them where to getit and how to pay for it.
A lthough I’ve presented several tech-nologies and intelligent system appli-
cations that could significantly impact thewell-being of our society—helping, in par-ticular, those who are poor, sick, or illiter-ate—much work remains before these toolsare routinely available and widely deployed.The productization of these technologiesrequires additional research and developmentwith the aim of increasing reliability, reduc-ing cost, and improving ease of use. This isthe grand challenge for the next generationof researchers and entrepreneurs. It is my
hope that governments, foundations, andmultinational corporations will lead the wayin creating technologies for a compassionateworld in 2050.
AcknowledgmentsThis article is based in part on the Honda Prize
lecture I gave in Nov. 2005. Praveen Garimella,Vamshi Ambati, and Hemant Rokesh helped pre-pare the article.
References
1. “World Population Aging: 1950-2050,” tech.report, Population Division, 2002 WorldAssembly on Aging, 2002.
2. M.E. Pollack, “Intelligent Technology for anAging Population: The Use of AI to AssistElders with Cognitive Impairment,” AI Mag-azine, vol. 26, no. 2, 2005, pp. 9–24.
3. D. Jajeh, “Robot Nurse Escorts and Schmoozesthe Elderly,” Circuit, 24 Aug. 2004, www.intel.com/employee/retiree/circuit/robot.htm.
4. R.R. Murphy and J.L. Burke, “Up from the Rub-ble: Lessons Learned about HRI from Searchand Rescue,” Proc. 49th Annual Meetings of theHuman Factors and Ergonomics Society, vol.49, 2005, p. 437; http://crasar.csee.usf.edu/research/Publications/CRASAR-TR2005-10.pdf.
5. J. Mostow et al., “A Prototype Reading Coachthat Listens,” Proc. 12th Nat’l Conf. ArtificialIntelligence (AAAI 94), AAAI Press, 1994,pp. 785–792.
6. J. Mostow and G. Aist, “Evaluating Tutorsthat Listen: An Overview of Project LISTEN,”Smart Machines in Education, K. Forbus andP. Feltovich, eds., MIT/AAAI Press, 2001, pp.169–234.
7. “Remarks of Jacqueline Glassman,” Presen-tation at the Intelligent Transportation Sys-tems’ World Congress, Nov. 2005, www.its.dot.gov/press/pdf/ITSspeech2005.pdf.
8. “Examination of Reduced Visibility Crashes
and Potential IVHS Countermeasures,” USDept. of Transportation, Jan. 1995, p. 21; www.itsdocs.fhwa.dot.gov//JPODOCS/REPTS_TE/1BD01!.PDF.
9. C. Thorpe et al., “Safe Robot Driving,” Proc.Int’l Conf. Machine Automation (ICMA 02),2002; www.ri.cmu.edu/pub_files/pub3/thorpe_charles_2002_2/thorpe_charles_2002_2.pdf.
10. “The Short Report,” tech. report, UrbanMobility Study, Texas Transportation Inst.,2002.
11. L. Bailey, “U-M Physicist: Smart Cruise Con-trol Eliminates Traffic Jams,” University ofMichigan, 12 July 2004, www.umich.edu/news/index.html?Releases/2004/Jul04/r071204.
12. C. Thorpe et al., “Vision and Navigation forthe Carnegie Mellon NavLab,” IEEE Trans.Pattern Analysis and Machine Intelligence,vol. 10, no. 3, 1988, pp. 362–373.
13. Computer Science and Telecommunicationsboard, More than Screen Deep: Toward EveryCitizen Interfaces to the Nation’s InformationInfrastructure, Nat’l Academies Press, 1997;http://www7.nationalacademies.org/cstb/pub_screendeep.html.
14. J.G. Carbonell, A. Lavie, and A. Black, “Lan-guage Technologies for Humanitarian Aid,”Technology for Humanitarian Action, Ford-nam Univ. Press, 2005, pp. 111–137.
15. R. Tongia, E. Subrahmanian, and V.S.Arunachalam, “Information and Communi-cation Technology for Sustainable Develop-ment, Defining a Global Research Agenda,”2003, www.cs.cmu.edu/~rtongia/ICT4SD_Front_Pages.pdf.
For more information on this or any other com-puting topic, please visit our Digital Library atwww.computer.org/publications/dlib.
MAY/JUNE 2006 www.computer.org/intelligent 31
T h e A u t h o rRaj Reddy is the Mozah Bint Nasser University Professor of Computer Sci-ence and Robotics at Carnegie Mellon University. His research interests includethe study of human-computer interaction, robotics, and artificial intelligence.He received his PhD in computer science from Stanford University. He’s a Cen-tennial Fellow of the IEEE and an ACM Turing Award winner. Contact him atWean Hall 5325, School of Computer Science, Carnegie Mellon Univ., Pitts-burgh, PA 15213-3981; [email protected].