sbas signal in space - wordpress.com sbas signal in space –the details can be found in
TRANSCRIPT

© GMV, 2007 Property of GMV
All rights reserved
SBAS SIGNAL IN SPACE
LECTURE 4.2
SGU 4823
SATELLITE NAVIGATION
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 2
SBAS Training Seminar Session 2
Introduction
This section presents a summary of the SBAS signal in space
– The details can be found in
• Appendix A of the RTCA MOPS DO-229D “Minimum Operational Performance Standards for Global Positioning System/Wide Area Augmentation System airborne equipment” Appendix A
• ICAO SARPs (Standards and Recommended Practices) Annex 10, Appendix B: Detailed Technical Specifications for the Global navigation satellite System (GNSS)
– Note that these two standards are nearly aligned but still a few differences remain
• For instance, the consideration of GLONASS is in SARPS but not in MOPS.
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 3
SBAS Training Seminar Session 2
SBAS Broadcast Data
As already introduced before, every SBAS system provides:
– Ranging signals transmitted by GEO satellites
– Differential corrections valid over a wide area
– Additional parameters to guarantee integrity
The SBAS shall provide the following information:
– Navigation data for each GEO satellite supporting ranging service
– Satellite orbit and clock corrections to the existing satellite navigation services (GPS, GLONASS and GEO)
– The estimation of errors associated to satellites (UDRE).
– Ionospheric corrections for a given grid of points
– The estimation of errors associated to ionosphere (GIVE).
These pieces of information are dynamically modelled by te SBAS ground segment
– The information is packed on messages to be sent to the user.
Other necessary information is embededed in the standard and does not have to be transmitted
• Tropospheric corrections and several a-priori worst case variances
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 4
SBAS Training Seminar Session 2
SBAS Data Structure
The SBAS delivers the information through messages encoded in the signal.
– These messages are sent every second with a data rate of 250 bits.
• The raw navigation message of the SBAS contains 500 bits (symbols).
• These raw data are ½ convolutional encoded with a Forward-error-correction encoding, which means that 250 bits of information are available every second at user level.
The 250-bit message is structures as shown below
– Bit 0 is considered the most significant bit, i.e. the bit that is transmitted and received first.
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 5
SBAS Training Seminar Session 2
SBAS Data Structure
Preamble.
– A unique 24–bit field, distributed over three successive words.
• Preamble sequence: 01010011 (83) - 10011010 (154) - 11000110 (198).
– It is assured that the start of the preamble is synchronous with a 6-second GPS sub-frame.
• The preamble allows the receiver to achieve frame synchronisation.
Message Type Identifier
– 6-bit field
• Allows up to 64 different messages (identifiers 0 to 63)
– Depending on the MT, the information in the Data field is different
• In current standards only 20 message types are definedis .
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 6
SBAS Training Seminar Session 2
SBAS Data Structure
Data Field
– 212 bits
– The information depends on the Message Type
• Will be explained after
Parity Information
– 24 bits
• CRC parity bits
• Provide protection against burst and random error
– For more information on parity bits algorithm generator see MOPS.
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 7
SBAS Training Seminar Session 2
SBAS Data Structure:
Message types
Type Contents
0 Don’t use for safety applications
1 PRN mask assignments, set up to 51 of 210 possible
2-5 Fast corrections
6 Integrity information
7 Fast correction degradation factor
9 Geo Navigation message (X,Y,Z, time, etc.)
10 Degradation parameters
12 SBAS Network time / UTC offset parameters
17 Geo satellite almanacs
18 Ionospheric grid points masks
24 Mixed fast corrections/long term satellite error corrections
25 Long term satellite error corrections
26 Ionospheric delay corrections
27 SBAS Service message
28 Clock Ephemeris Covariance Matrix message
62 Internal test message
63 Null message
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 8
SBAS Training Seminar Session 2
Relation between SBAS messages
SBAS Messages must be related to the broacast ephemeris of the GNSS constellation
– Because the information provided is differential
– And the integrity is essential
– It must be applied to a certain set of broadcast ephemeris
– And are applicable only to it
Furthermore, it is not posible to broadcast all intended SBAS information on a single message
– This means that SBAS Messages must be also related among themselves
– This is achieved using the Issue of Data parameters (IOD) concept
The sequence of transmission of the messages is responsibility of the SBAS Service Provider
– Fulfilling requirements as refresh time, alarm conditions, etc
• Under an alert condition, the SBAS must send the alert message four times in four seconds
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 9
SBAS Training Seminar Session 2
Satellite Information Messages
Message type 1
– Provides the PRN mask assignments
• That is, the list of satellites to be monitored by the SBAS system
– An “IOPD” (2-bits) allow to trace chages in the mask
– Each satellite has a predetermined position within the remaining 210 bits field.
• A bit 1 means it will be monitored, a bit-0 means that it will not
• Due to constraints in other messages, a maximum of only 51 satellites can be chosen at a given time
– Changes in the mask are infrequent
• New satellites launches
• Satellites decommissioned
• …
Type Contents
1 PRN mask
assignments, set up to
51 of 210 possible
2-5 Fast corrections
6 Integrity information
7 Fast correction
degradation factor
9 Geo Navigation
message (X,Y,Z, time,
etc.)
17 Geo satellite almanacs
24 Mixed fast
corrections/long term
satellite error
corrections
25 Long term satellite
error corrections
28 Clock Ephemeris
Covariance Matrix
message
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 10
SBAS Training Seminar Session 2
Satellite Information Messages
Message types 2, 3, 4 and 5
– They include satellite fast clock corrections and UDRE values, each of them to at most 13 satellites
– Message type 2 includes the information related to the first 13 satellites in mask
• Message type 3 for the 14th to the 26th
• Message type 4 for the 27th to the 39th
• Message type 5 for the 40th to the 51st
– Some messages may not be used if te number of satellites in the mask is small
• E.g. If the number of satellites in mask is less than 40, the message type 5 will not used
• Furthermore, if there are less than 6 satellites to be allocated in the last fast correction message, this message type can be replaced by a message type 24.
Type Contents
1 PRN mask
assignments, set up to
51 of 210 possible
2-5 Fast corrections
6 Integrity information
7 Fast correction
degradation factor
9 Geo Navigation
message (X,Y,Z, time,
etc.)
17 Geo satellite almanacs
24 Mixed fast
corrections/long term
satellite error
corrections
25 Long term satellite
error corrections
28 Clock Ephemeris
Covariance Matrix
message
AzmiHassan SGU4823 SatNav 2012
© GMV, 2007
December 2007 Page 11
SBAS Training Seminar Session 2
Satellite Information Messages
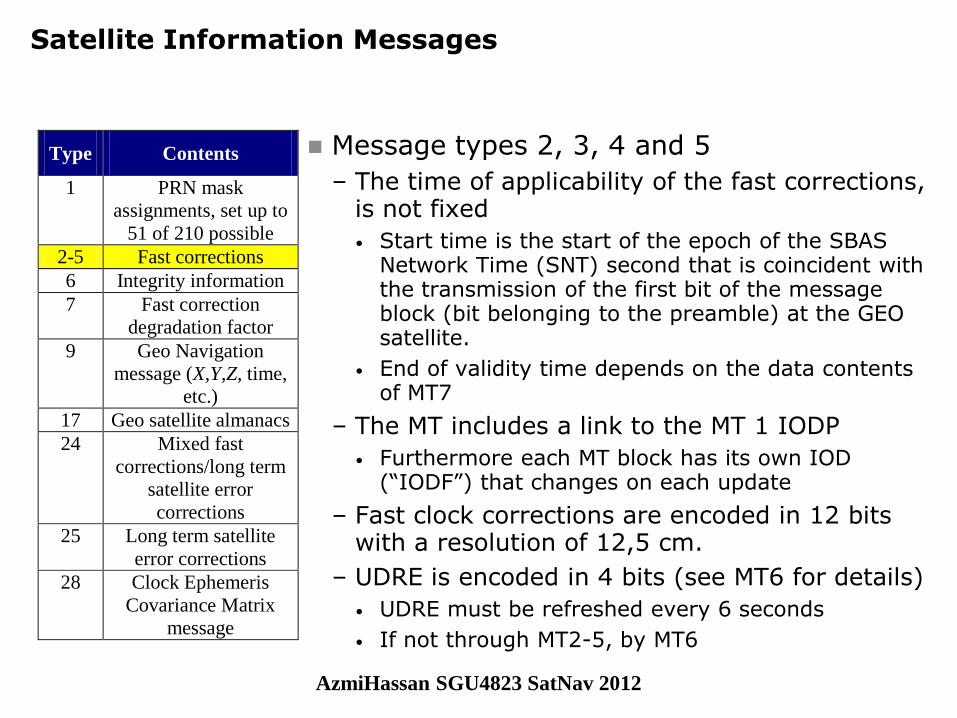
Message types 2, 3, 4 and 5
– The time of applicability of the fast corrections, is not fixed
• Start time is the start of the epoch of the SBAS Network Time (SNT) second that is coincident with the transmission of the first bit of the message block (bit belonging to the preamble) at the GEO satellite.
• End of validity time depends on the data contents of MT7
– The MT includes a link to the MT 1 IODP
• Furthermore each MT block has its own IOD (“IODF”) that changes on each update
– Fast clock corrections are encoded in 12 bits with a resolution of 12,5 cm.
– UDRE is encoded in 4 bits (see MT6 for details)
• UDRE must be refreshed every 6 seconds
• If not through MT2-5, by MT6
Type Contents
1 PRN mask
assignments, set up to
51 of 210 possible
2-5 Fast corrections
6 Integrity information
7 Fast correction
degradation factor
9 Geo Navigation
message (X,Y,Z, time,
etc.)
17 Geo satellite almanacs
24 Mixed fast
corrections/long term
satellite error
corrections
25 Long term satellite
error corrections
28 Clock Ephemeris
Covariance Matrix
message
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 12
SBAS Training Seminar Session 2
Satellite Information Messages
Message type 6
– The MT 6 contains the integrity (UDRE) information for up to 51 satellites
• It is linked to the last sent FC through IODF (not IODP)
– This MT is mostly used:
• To broadcast alerts if MT2-5 are sent every 6 seconds
• To update the integrity information every 6 seconds if the FC are refreshed at a slower rate
Type Contents
1 PRN mask
assignments, set up to
51 of 210 possible
2-5 Fast corrections
6 Integrity information
7 Fast correction
degradation factor
9 Geo Navigation
message (X,Y,Z, time,
etc.)
17 Geo satellite almanacs
24 Mixed fast
corrections/long term
satellite error
corrections
25 Long term satellite
error corrections
28 Clock Ephemeris
Covariance Matrix
message
UDREIi UDREi Meters 2i,UDRE
Meters2
0 0.75 0.0520
1 1.0 0.0924
2 1.25 0.1444
3 1.75 0.2830
4 2.25 0.4678
5 3.0 0.8315
6 3.75 1.2992
7 4.5 1.8709
8 5.25 2.5465
9 6.0 3.3260
10 7.5 5.1968
11 15.0 20.7870
12 50.0 230.9661
13 150.0 2078.695
14 Not Monitored Not Monitored
15 Do Not Use Do Not Use
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 13
SBAS Training Seminar Session 2
Satellite Information Messages
Message type 7
– This message includes a time-dependent degradation factor for the fast corrections
• Variance increment since time of reception, to account for unpredicted clock noise
• Depending on this variance, the validity time of FC is also modified
– The smaller the degradation, the longer the validity time
– It also defines the system latency time
• The time the system needs to process the information
Type Contents
1 PRN mask
assignments, set up to
51 of 210 possible
2-5 Fast corrections
6 Integrity information
7 Fast correction
degradation factor
9 Geo Navigation
message (X,Y,Z, time,
etc.)
17 Geo satellite almanacs
24 Mixed fast
corrections/long term
satellite error
corrections
25 Long term satellite
error corrections
28 Clock Ephemeris
Covariance Matrix
message
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 14
SBAS Training Seminar Session 2
Satellite Information Messages
Message type 9
– MT 9 contains the GEO ephemeris information
• Coordinates, velocity and clock offset and drift, associated to the GEO transmitting the signal
• User Range Accuracy (as for GPS satellites).
– A receiver tracking more than one GEO satellite will receive and decode the message type 9 for each GEO satellite from the corresponding broadcast lane
Message type 17
– Each MT 7 contains the almanac information for up to three GEO satellites
• Position and clock (not so accurate as MT9)
• Health status
– More than one message of this type can be broadcast by the same GEO, if almanacs are provided for a higher number of SBAS GEO satellites
– GEO almanac positions cannot be used in the computation of the user position
Type Contents
1 PRN mask
assignments, set up to
51 of 210 possible
2-5 Fast corrections
6 Integrity information
7 Fast correction
degradation factor
9 Geo Navigation
message (X,Y,Z, time,
etc.)
17 Geo satellite almanacs
24 Mixed fast
corrections/long term
satellite error
corrections
25 Long term satellite
error corrections
28 Clock Ephemeris
Covariance Matrix
message
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 15
SBAS Training Seminar Session 2
Satellite Information Messages
Message type 25
– MT 25 includes estimations of slow varying satellite ephemeris and clock errors
• Provided in ECEF WGS-84
• And referenced to the ephemeris and clock parameters broadcast by the satellite navigation service
– IODE used to relate the long-term corrections with the ephemeris used to which the corrections are computed
– For GLONASS a re-defined rough transformation must be applied also (defined in SARPs only)
– The Data Field of the message type 25 is divided into two parts of 106 bits each
• The information contained in each half depends on the first bit (velocity code)
• Bit 0:
– Only offset corrections (orbit and clock) are included
– Up to 2 satellites are included in this half
• Bit 1:
– Offset and drift corrections (orbit and clock) are included
– Only 1 satellite is included in this half
Type Contents
1 PRN mask
assignments, set up to
51 of 210 possible
2-5 Fast corrections
6 Integrity information
7 Fast correction
degradation factor
9 Geo Navigation
message (X,Y,Z, time,
etc.)
17 Geo satellite almanacs
24 Mixed fast
corrections/long term
satellite error
corrections
25 Long term satellite
error corrections
28 Clock Ephemeris
Covariance Matrix
message
AzmiHassan SGU4823 SatNav 2012
© GMV, 2007
December 2007 Page 16
SBAS Training Seminar Session 2
Satellite Information Messages
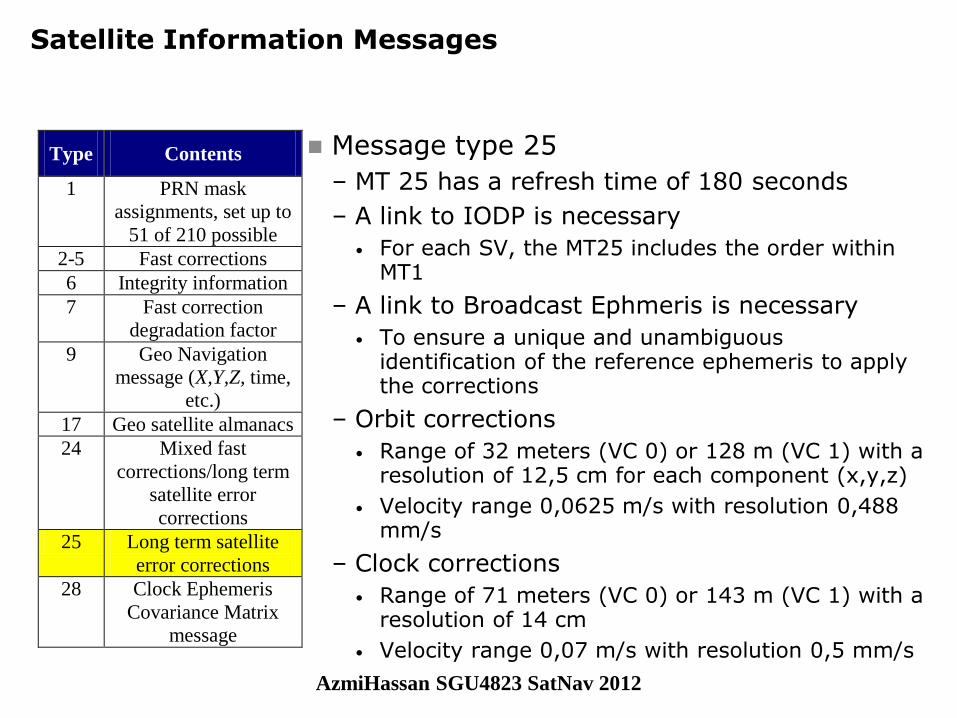
Message type 25
– MT 25 has a refresh time of 180 seconds
– A link to IODP is necessary
• For each SV, the MT25 includes the order within MT1
– A link to Broadcast Ephmeris is necessary
• To ensure a unique and unambiguous identification of the reference ephemeris to apply the corrections
– Orbit corrections
• Range of 32 meters (VC 0) or 128 m (VC 1) with a resolution of 12,5 cm for each component (x,y,z)
• Velocity range 0,0625 m/s with resolution 0,488 mm/s
– Clock corrections
• Range of 71 meters (VC 0) or 143 m (VC 1) with a resolution of 14 cm
• Velocity range 0,07 m/s with resolution 0,5 mm/s
Type Contents
1 PRN mask
assignments, set up to
51 of 210 possible
2-5 Fast corrections
6 Integrity information
7 Fast correction
degradation factor
9 Geo Navigation
message (X,Y,Z, time,
etc.)
17 Geo satellite almanacs
24 Mixed fast
corrections/long term
satellite error
corrections
25 Long term satellite
error corrections
28 Clock Ephemeris
Covariance Matrix
message
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 17
SBAS Training Seminar Session 2
Satellite Information Messages
Message type 24
– MT 24 combines both fast and long-term satellite corrections
– MT 24 can be broadcast if the number of satellites in the last fast correction message is less than or equal to 6.
• A SBAS provider may decide not to use this message
– The first half of MT 24 includes fast corrections and UDRE for 6 or less satellites, with the same format as MT2-5
– The second half of MT 24 is equivalent to one half of MT 25
Type Contents
1 PRN mask
assignments, set up to
51 of 210 possible
2-5 Fast corrections
6 Integrity information
7 Fast correction
degradation factor
9 Geo Navigation
message (X,Y,Z, time,
etc.)
17 Geo satellite almanacs
24 Mixed fast
corrections/long term
satellite error
corrections
25 Long term satellite
error corrections
28 Clock Ephemeris
Covariance Matrix
message
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 18
SBAS Training Seminar Session 2
Satellite Information Messages
Message type 28
– MT 28 contains the relative covariance matrix for clock and ephemeris error.
– It expands the UDRE by scaling it (UDRE value) depending on the user location
• It is aimed to increase availability inside the service area
• … while ensuring integrity outside.
– This is an optional message
• A SBAS provider may decide not to use it
– The covariance information is typically a slowly changing parameter
• It is updated slower than UDRE
• Refresh time of 180 s
– A link to IODP is necessary
• For each SV, the MT28 includes the order within MT1
Type Contents
1 PRN mask
assignments, set up to
51 of 210 possible
2-5 Fast corrections
6 Integrity information
7 Fast correction
degradation factor
9 Geo Navigation
message (X,Y,Z, time,
etc.)
17 Geo satellite almanacs
24 Mixed fast
corrections/long term
satellite error
corrections
25 Long term satellite
error corrections
28 Clock Ephemeris
Covariance Matrix
message
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 19
SBAS Training Seminar Session 2
The ionospheric corrections depend on the line of sight satellite–user
A grid of points located at 350 km altitude above the WGS-84 ellipsoid Earth approximation is defined
– Ionospheric Grid Points (IGPs)
Ionospheic information is sent for those points
– Ionospheric vertical delay estimatons at each point
– Estimation of the error of the ionospheric parameters
The user interpolates this information to the line of sight user-satellite
– Bi-lineal interpolation to reach the ionospheic “pierce point”
• Cross point between the user-satellite line of sight and the 350-Km height layer defined for the iono model
– Mapping to the user-satellite elevation angle
Type Contents
18 Ionospheric grid points masks
26 Ionospheric delay corrections
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 20
SBAS Training Seminar Session 2
Ionospheric Information Messages
The IGPs that constitute the interpolation grid are predefined by latitudce and longitude on a Mercator projection map at 350 Km above the earth.
A total of 2192 IGPs are considered, divided in 11 numbered bands (band 0 to band 10)
– Bands 0 to 8
• Vertical bands, that is, covering sectors of the earth between two meridians
• The spacing between IGPs is 5 degrees in latitude and longitude
• On each band IGPs are numbered from 1 to 201
– Starting from the South-West corner first northward and then eastward (there is no IGP 201 in band 8).
– Bands 9 and 10 are defined for each polar circle
• The spacing between IGPs varies
• IGPs are numbered from 1 to 192. The IGPs are numbered counting eastward from the western corner closest to the equator along each latitude row of the band (from West to East) and continuing for each row towards the poles.
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 21
SBAS Training Seminar Session 2
Ionospheric Information Messages
N 75
N 65
N 55
0
0W180
N 85
W100 E 100W140 W60 W20 E 20 E 60 E 140
N 50
S 75
S 65
S 55
S 85
S 500 1 2 3 4 5 6 7 8
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 22
SBAS Training Seminar Session 2
Ionospheric Information Messages
Message type 18
– Messages type 18 include the ionospheric mask.
– There are several MT 18 to form a complete mask
• Each message contains the mask information of one band (and indicates how many bands are icluded in the mask).
• A bit set to 1 indicates that ionospheric correction information is being provided for that IGP within the band.
– A set of MT 18 is identified by one (and the same for all) IODI
• IODI range is from 0 to 3, changing each time the IGP mask is modified
• Changes in the mask are extremely infrequent
– Reflect a change in the intended service area
– A SBAS provider will include just a few bands and IGPs within the mask
• Those necessary to users on the SBAS primary service area
• Bands unused are not broadcast in MT18
Type Contents
18 Ionospheric grid points masks
26 Ionospheric delay corrections
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 23
SBAS Training Seminar Session 2
Ionospheric Information Messages
Message type 26
– Message types 26 provide the Ionospheric Delay Corrections (GIVD) and their accuracy (GIVE) for the IGPs that are configured in the mask
– There are several MT 26 broadcast
• Each one covers up to 15 IGPs
• The IGPs being covered are identified by the Band and the Block
– All IGPs of a given MT26 correspond to the same band
– The blocks are ordered in groups of 15 IGPs in the mask (Block 0 includes the first 15, Block 1 the next 15, etc).
– The units are “meters in L1 frequency”, that is, GIVD represent in meters the delay caused by the ionosphere for an user observing the l1 frequency band.
• Recall that the ionospheric delay in radio signals depends of the incerse of the frequency squared.
Type Contents
18 Ionospheric grid points masks
26 Ionospheric delay corrections
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 24
SBAS Training Seminar Session 2
Ionospheric Information Messages
Message type 26
– The GIVD parameters are encoded in 9 bits,
• Resolution of 0,125 m
• Range from 0 to 63,875 m
• A GIVD maximum (111111111) indicates “DO NOT USE”
– The GIVE parameters are encoded in 4 bits
GIVEIi GIVEi Meters 2
i,GIVE
Meters2
0 0.3 0.0084
1 0.6 0.0333
2 0.9 0.0749
3 1.20 0.1331
4 1.5 0.2079
5 1.8 0.2994
6 2.1 0.4075
7 2.4 0.5322
8 2.7 0.6735
9 3.0 0.8315
10 3.6 1.1974
11 4.5 1.8709
12 6.0 3.3260
13 15.0 20.7870
14 45.0 187.0826
15 Not Monitored Not Monitored
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 25
SBAS Training Seminar Session 2
Other messages
Some additional messages are not directly related with satellite corrections or with ionospheric corrections
Message type 0
– This message will be used during SBAS testing
– Upon reception of MT0, all data from the SBAS must be discarded for safety critical applications
– MT 0 can be formatted in two types
• MT0/0
– Contents of data field are zero
– SBAS data shall not be used at all
• MT 0/2
– Contents of data field are those of a MT 2
– SBAS could be used for non safety critical applications
– MT2 is not broadcast when MT0/2 is broadcast
Type Contents
0 Don’t use for safety
applications
10 Degradation
parameters
12 SBAS Network time
/ UTC offset
parameters
27 SBAS Service
message
62 Internal test
message
63 Null message
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 26
SBAS Training Seminar Session 2
Other messages
Message type 10
– This message contains degradation parameters
• Several parameters apply to satellite variances
• Other apply to ionospheric variances
– Only one message of this type is used
– The parameters increase variances:
• Upon message loss
• Upon late refreshment of information
• As the last valid message grows old
Message type 12
– MT 12 contains information about time-offset parameters between different system times.
• UTC to SBAS network Time
– With the same format as described in GPS ICD
• GLONASS to SBAS Network Time
– Optional (only defined in SARPs)
Type Contents
0 Don’t use for safety
applications
10 Degradation
parameters
12 SBAS Network time
/ UTC offset
parameters
27 SBAS Service
message
62 Internal test
message
63 Null message
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 27
SBAS Training Seminar Session 2
Other messages
Message type 27
– Messages type 27 are used to increase the UDRE values (δUDRE) over selected areas
• Defined to improve integrity outside primary service areas
• Or to informed about localised degradations
– MT 27 is optional and incompatible with MT 28
• SBAS provider shall only use MT27 or MT28
– Each message contains up to 5 regions
• Several messages can be sent
• Linked through an IOD (“IODS”)
– Regions may overlap, then a “priority code” is used
• The δUDRE factor with higher priority will be used
• If overlap with same priority, the lowest δUDRE may be used
Type Contents
0 Don’t use for safety
applications
10 Degradation
parameters
12 SBAS Network time
/ UTC offset
parameters
27 SBAS Service
message
62 Internal test
message
63 Null message
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 28
SBAS Training Seminar Session 2
Other messages
Message type 62
– Internal test message
– No effect on user
Message type 63
– Null message
– Broadcast in case no other message is available or needed to be sent
– No effect on user
Type Contents
0 Don’t use for safety
applications
10 Degradation
parameters
12 SBAS Network time
/ UTC offset
parameters
27 SBAS Service
message
62 Internal test
message
63 Null message
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 29
SBAS Training Seminar Session 2
Message time-outs
SBAS Data
Maximum
update interval
(s)
En Route,
Terminal, NPA
Time-outs (s)
Precision
Approach
Time-outs (s)
Associated
Message Types
Don’t use for safety
applications 6 N/A (*) N/A (*) 0
PRN mask 120 (**) 600 600 1
UDREI 6 18 12 2 to 6, 24
Fast Corrections See MOPS Table
A-8
See MOPS Table
A-8
See MOPS Table
A-8 2 to 5, 24
Long Term Corrections 120 360 240 24, 25
GEO Navigation Data 120 360 240 9
Fast Correction
Degradation 120 360 240 7
Degradation Parameters 120 360 240 10
Ionospheric Grid Mask 300 (**) 1200 1200 18
Ionospheric Corrections 300 600 600 26
UTC Timing Data 300 86400 86400 12
Almanac Data 300 None None 17
Service Level 300 (if used) 86400 86400 27
Clock. Ephemeris
Covariance Matrix 120 360 240 28
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 30
SBAS Training Seminar Session 2
Message alerts
Alert conditions
– An alarm situation can be defined as a non-expected behaviour of the SBAS corrections.
– Two types of alarms are possible:
• Satellite alert: the status of a satellite is set to "Don't Use" due to an integrity risk detected at pseudorange level or an out of range of its fast correction or UDRE figure.
– Can be sent in fast correction messages (types 2 to 5, 24)
– In the integrity message (type 6)
• Ionospheric alert: the status of an IGP is set to "Don't Use" due to an integrity risk detected at pseudorange level or an out of range of its delay estimation or GIVE figure.
– Ionospheric alerts are broadcast in messages of type 26
– Or covered by general UDRE increments
– Every alert condition will be repeated three times after the notification of the alert condition
• During an alert the message with the alarm information must be sent four times in four seconds, with the same information in all these epochs
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 31
SBAS Training Seminar Session 2
Overall Message Processing
L1 User Processing of L1 Data Stream
tsGEO Only:
GEOMETRIC
RANGE
(S-4)
POSITION
SOLUTION
(S-5)
+
-
CLOCK
CORRECTION
POLYNOMIAL
TROPOSPHERIC
CORRECTION
IONOSPHERIC
CORRECTION
(S-3)
FAST
CORRECTIONS
(S-2)
+
+
+
TGD (GPS ONLY)
IS-GPS-200D
-tr
(GPS ONLY)
IS-GPS-200D
+ +
SECONDS
TO METERS
TCi
ICi
PRCi(ti,of) +
RRCi(ti,of)
× (t-ti,of)
+
GPS: (IS-GPS-200D)
GEO: MT 9
CARRIER
SMOOTHED
PSEUDORANGE
Pn POSITION,
VELOCITY,
tsv,tG
PRi,corrected
tsv,tG
tsv,tGPOSITION
POSITION
tsv,tG
tsv(t)
GPS: c × (tsv+ tsv(t) -TGD+ tr)
GEO: c × (tG+ tsv(t)) + ts
tsv,tGPOSITION
2
,airi
2
, flti
2
,UIREi
2
,tropoi
2
i
Di
SBAS LONG
TERM CLOCK
CORRECTION
(GPS & GEO)
tsv
tG
MT 25, MT 24
+
(Optional for Enroute
thru NPA)
L1 User Processing of L1 Data Stream
tsGEO Only:
GEOMETRIC
RANGE
(S-4)
POSITION
SOLUTION
(S-5)
+
-
CLOCK
CORRECTION
POLYNOMIAL
TROPOSPHERIC
CORRECTION
IONOSPHERIC
CORRECTION
(S-3)
FAST
CORRECTIONS
(S-2)
+
+
+
TGD (GPS ONLY)
IS-GPS-200D
-tr
(GPS ONLY)
IS-GPS-200D
+ +
SECONDS
TO METERS
TCi
ICi
PRCi(ti,of) +
RRCi(ti,of)
× (t-ti,of)
+
GPS: (IS-GPS-200D)
GEO: MT 9
CARRIER
SMOOTHED
PSEUDORANGE
Pn POSITION,
VELOCITY,
tsv,tG
PRi,corrected
tsv,tG
tsv,tGPOSITION
POSITION
tsv,tG
tsv(t)
GPS: c × (tsv+ tsv(t) -TGD+ tr)
GEO: c × (tG+ tsv(t)) + ts
tsv,tGPOSITION
2
,airi
2
, flti
2
,UIREi
2
,tropoi
2
i
Di
SBAS LONG
TERM CLOCK
CORRECTION
(GPS & GEO)
tsv
tG
MT 25, MT 24
+
(Optional for Enroute
thru NPA)
AzmiHassan SGU4823 SatNav 2012

© GMV, 2007
December 2007 Page 32
SBAS Training Seminar Session 2
Overall Message Processing
*APPROPRIATE = both fast and LT corrections exist from an SBAS satellite (single satellite for GLS,
LPV, LP or LNAV/VNAV operation) with service volume supporting the user’s location
Is Sat. SBAS
UNHEALTHY?
Is Sat. SBAS
UNMONITORED?
RANGE
SOURCE
IS NOT
USABLE
Yes
Yes
YesNo
No
222
, 60 mflti
CORRECTIONS
ARE NOT APPLIED
2.1.1.4.13
COMPUTE
MT27 δUDRE
COMPUTE
MT28 δUDRE
δUDRE=1
MT27, A.4.4.13
MT28, A.4.4.16
MT 28
AVAILABLE
FOR THIS
SAT?
MT 27
ACTIVE FOR
USER LOC
*Incomplete
Correction Set
HAS
MT27 or MT28
FOR ANY SATELLITE
BEEN RECEIVED
FROM THIS
GEO?
No
No
Yes
ARE
MT7 / MT10
DEGRADATION
PARAMETERS
USED?
J.2.2
2,
2
, 8mUDREUDREiflti
MT27,MT28, MT6, MT2-5, MT24 J.2.2
ARE
APPROPRIATE*
FAST, LONG TERM (GPS)
AND RANGE RATE
CORRECTIONS
AVAILABLE?
No
Yes
PRCi(ti,of)=0
RRCi(ti,of)=0
*Incomplete
Correction Set
J.2.2
Calculate
PRCi(ti,of), RRCi(ti,of)
1
022222
,
2
,
2
,,2
,
UDREerltcrrcFCUDREiUDREi
UDREerltcrrcFCUDREiUDREiflti
RSSif
RSSif
MT6, MT2-5, MT24, MT7, MT10
A.4.5.1
Yes
No
PRCi(ti,of)=0
RRCi(ti,of)=0
MT2-5, MT24
A.4.4.3
MT7,
MT10
A.4.5
PRCi(ti,of) + RRCi(ti,of) × (t-ti,of)
2
, flti
SATELLITE CORRECTIONS
UDREI>=12 &
GLS, LPV, LP
or LNAV/VNAV
OPERATION?
MT2-5,24,6
2.1.4.9.1
2.1.5.9.1
No
No
GLS, LPV, LP
or LNAV/VNAV
OPERATION?
Yes
MT2-5,6,24,25
2.1.1.5.3
MT2-5,24,6
2.1.1.5.5
2.1.4.11
2.1.4.11
Yes
Yes
MT2-5, MT24, MT25
2.1.1.4.12
No
*APPROPRIATE = both fast and LT corrections exist from an SBAS satellite (single satellite for GLS,
LPV, LP or LNAV/VNAV operation) with service volume supporting the user’s location
Is Sat. SBAS
UNHEALTHY?
Is Sat. SBAS
UNMONITORED?
RANGE
SOURCE
IS NOT
USABLE
Yes
Yes
YesNo
No
222
, 60 mflti
CORRECTIONS
ARE NOT APPLIED
2.1.1.4.13
COMPUTE
MT27 δUDRE
COMPUTE
MT28 δUDRE
δUDRE=1
MT27, A.4.4.13
MT28, A.4.4.16
MT 28
AVAILABLE
FOR THIS
SAT?
MT 27
ACTIVE FOR
USER LOC
*Incomplete
Correction Set
HAS
MT27 or MT28
FOR ANY SATELLITE
BEEN RECEIVED
FROM THIS
GEO?
No
No
Yes
ARE
MT7 / MT10
DEGRADATION
PARAMETERS
USED?
J.2.2
2,
2
, 8mUDREUDREiflti 2,
2
, 8mUDREUDREiflti
MT27,MT28, MT6, MT2-5, MT24 J.2.2
ARE
APPROPRIATE*
FAST, LONG TERM (GPS)
AND RANGE RATE
CORRECTIONS
AVAILABLE?
No
Yes
PRCi(ti,of)=0
RRCi(ti,of)=0
*Incomplete
Correction Set
J.2.2
Calculate
PRCi(ti,of), RRCi(ti,of)
1
022222
,
2
,
2
,,2
,
UDREerltcrrcFCUDREiUDREi
UDREerltcrrcFCUDREiUDREiflti
RSSif
RSSif
MT6, MT2-5, MT24, MT7, MT10
A.4.5.1
Yes
No
PRCi(ti,of)=0
RRCi(ti,of)=0
MT2-5, MT24
A.4.4.3
MT7,
MT10
A.4.5
PRCi(ti,of) + RRCi(ti,of) × (t-ti,of)
2
, fltiPRCi(ti,of) + RRCi(ti,of) × (t-ti,of)
2
, flti
SATELLITE CORRECTIONS
UDREI>=12 &
GLS, LPV, LP
or LNAV/VNAV
OPERATION?
MT2-5,24,6
2.1.4.9.1
2.1.5.9.1
No
No
GLS, LPV, LP
or LNAV/VNAV
OPERATION?
Yes
MT2-5,6,24,25
2.1.1.5.3
MT2-5,24,6
2.1.1.5.5
2.1.4.11
2.1.4.11
Yes
Yes
MT2-5, MT24, MT25
2.1.1.4.12
No
tsv,tG
SBAS Based
Corrections
Are Available?
Yes
No
IONOSPHERIC CORRECTION
RANGE
SOURCE
IS NOT
USABLE
ICi=Tiono
COMPUTE
SBAS-BASED
IONOSPHERIC
CORRECTIONS
2
,UIREi
MT 26, MT18,
A.4.4.10
APPLY
DEGRADATION
PARAMETERS
2
,ionogridiMT 26, MT 18, MT 10,
A.4.5.2
MT18,MT26,
A.4.4.10.3
GLS, LPV, LP, OR LNAV/VNAV OPERATIONS
tsv,tG
SBAS Based
Corrections
Are Available?
Yes No
COMPUTE
GPS-BASED
IONOSPHERIC
CORRECTIONS
ICi= -Tiono
2
,UIREi
J.2.3
20.3.3.5.2.5 (IS-GPS-200D)
COMPUTE
SBAS-BASED
IONOSPHERIC
CORRECTIONS
ICi
2
,UIREi
MT 26, MT 18
A.4.4.10
APPLY
DEGRADATION
PARAMETERS
2
,ionogridiMT 26, MT 18, MT 10,
A.4.5.2
MT18,MT26, A.4.4.10.3
ENROUTE, TERMINAL OR NPA OPERATIONS
tsv,tG
SBAS Based
Corrections
Are Available?
Yes
No
IONOSPHERIC CORRECTION
RANGE
SOURCE
IS NOT
USABLE
ICi=Tiono
COMPUTE
SBAS-BASED
IONOSPHERIC
CORRECTIONS
2
,UIREi
MT 26, MT18,
A.4.4.10
APPLY
DEGRADATION
PARAMETERS
2
,ionogridiMT 26, MT 18, MT 10,
A.4.5.2
MT18,MT26,
A.4.4.10.3
GLS, LPV, LP, OR LNAV/VNAV OPERATIONS
tsv,tG
SBAS Based
Corrections
Are Available?
Yes No
COMPUTE
GPS-BASED
IONOSPHERIC
CORRECTIONS
ICi= -Tiono
2
,UIREi
J.2.3
20.3.3.5.2.5 (IS-GPS-200D)
COMPUTE
SBAS-BASED
IONOSPHERIC
CORRECTIONS
ICi
2
,UIREi
MT 26, MT 18
A.4.4.10
APPLY
DEGRADATION
PARAMETERS
2
,ionogridiMT 26, MT 18, MT 10,
A.4.5.2
MT18,MT26, A.4.4.10.3
ENROUTE, TERMINAL OR NPA OPERATIONS
AzmiHassan SGU4823 SatNav 2012