self-reconfiguration for adaptive furniture jocelyne lotfi
TRANSCRIPT

Self-reconfiguration for adaptive furniture
Jocelyne Lotfi

Content
Goal of the Project Previous work of Masoud Asadpour
Presentation of the algorithm My contribution
Changes made Future Work and Time Table

Goal of the project
Adapt an existing reconfiguration algorithm for the roombots
Improve the efficiency of this algorithm

Work of Masoud Asadpour
Graph representation Signature Distance Metric Full Algorithm

Graph representation
Each node is one robot
Each edge have a label representing how they are attached
23
21
23
21
44
23
21
23
21
129
23 21 23 21 92
23
21
23
21
23212321
21
23
21
23
11669
44
116
21
23
21
23
92
23
21
23
21
15
14
13
12
11
20
19
18
17
165
4
3
2
1
10
9
8
7
6
26 27 28 29 3025
24
23
22
21
31
32
33
34
3540 39 38 37 36
1
2
34
5
6

Signature
How to say that two graph are the same ? => Signature feature
1
2
35
4
6
e1
e2e3
e4
e5 e6
e7
7e8
start
Signature : [1 e1 2][2 e2 3][3 e3 2][1 e4 4][4 e5 5][4 e6 6][6 –e7 1][1 –e8 7]

Distance Metric
Next question : how far are we from the goal ? Graph Edit Distance Maximum Commun Sub-Graph, in practice use
of an upper-bound.
1 2
3
4 5
8 7 6
5’1’
2’
3’ 4’
8’ 7’ 6’
Initial position Final position
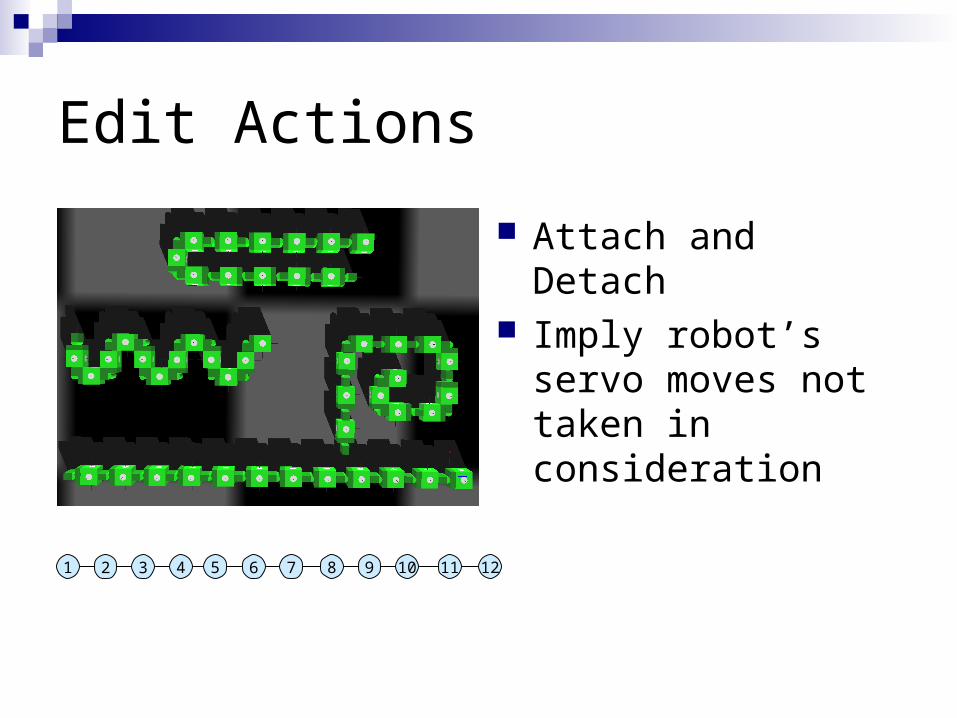
Edit Actions
Attach and Detach Imply robot’s servo
moves not taken in consideration
12111094321 8765

Full algorithm
begin
end
Compute Sgn(I), Sgn(F)
Signature DB
P-Queue
Sgn(I)=Sgn(F) ?Y Output the
solutionPush I in a priority-queue
I← Pop from the P-Queue
I’← Apply action a to I
Compute Sgn(I’)
Sgn(I’) already exists?
Save Sgn(I’)
Y
N
N
Push I’ in the P-Queue
Loop for Feasible actions
Manual Revision
queueempty

My contribution
Adapt the algorithm for roombots Change of labeling and adding of move
actions.

What is roombots ?

Move Actions
Overall goal => having furniture Three levels of freedom imply lots of movements Want to get a type of “stuck” form in space

Move Actions Change configuration in space => change
of labelling
110 68

Change in the algorithm
Need of a fixed position representation of the robot
Move action = Detach action followed by Attach action => no change in the underlying theory base on graph edit distance
Same kind of graph, so reusability of signature process
0
7
8
9
2 5
31
4
6

Now
I have adapted the algorithm for roombots with Move action implemented
Need of test : Number of action between start and end
configuration found compare to minimum Speed

Future Work
Improve efficiency by :Different search approach
Stochastic method
Adaptation of the signature process for highly symmetric modules
Possible bigger structure handling

Time Table
November => tests of the current version + change of search approched
December => adaptation of the signature + big structures handling (if enough time)
January => report + presentation
Questions ?