sequential modeling with the hidden markov model lecture 9 spoken language processing prof. andrew...
TRANSCRIPT

Sequential Modeling with the Hidden Markov Model
Lecture 9
Spoken Language Processing
Prof. Andrew Rosenberg
2
Markov Assumption
• If we can represent all of the information available in the present state, encoding the past is un-necessary.
The future is independent of the past given the present

3
Markov Assumption in Speech
• Word Sequences• Phone Sequences• Part of Speech Tags• Syntactic constituents• Phrase sequences• Discourse Acts• Intonation

4
Markov Chain
• The probability of a sequence can be decomposed into a probability of sequential events.
x1 x2 x3
5
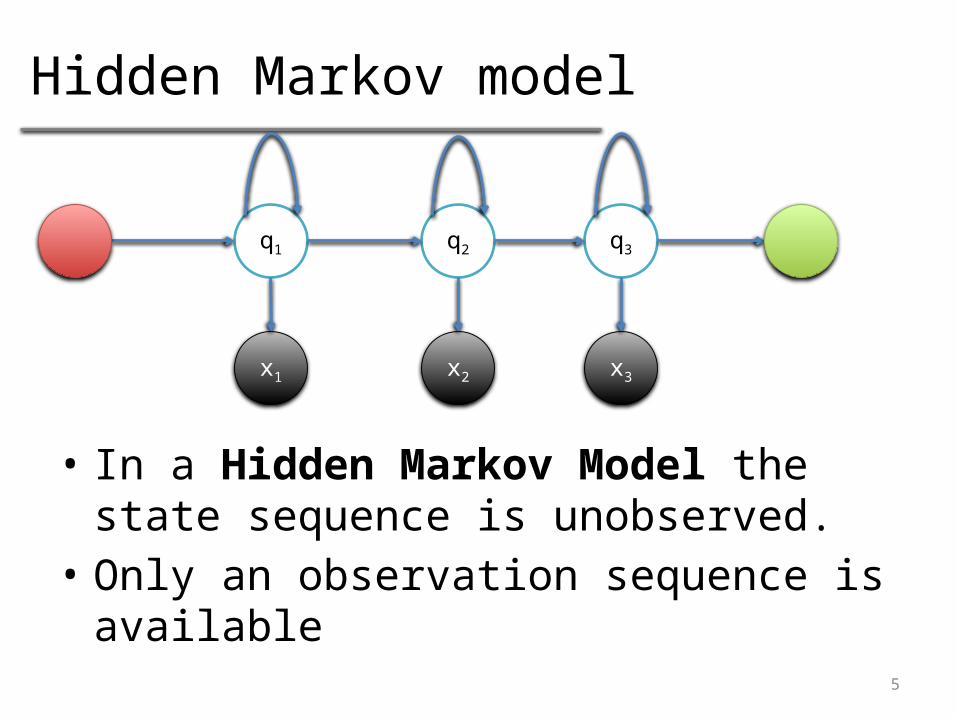
Hidden Markov model
• In a Hidden Markov Model the state sequence is unobserved.
• Only an observation sequence is available
q1 q2 q3
x1 x2 x3

6
Hidden Markov model
• Observations are MFCC vectors• States are phone labels• Each state (phone) has an associated
GMM modeling the MFCC likelihood
q1 q2 q3
x1 x2 x3

7
Forward-Backwards Algorithm
• HMMs are trained by collecting and distributing information from observations to states.
• The Forward-Backwards algorithm is a specific example of EM.
• In the HMM topology (variable relationship), the training converges in one forward pass, and a backwards pass.– hence the name

8
Forwards Backwards Algorithm
• Forwards-Step:– Collect up from the observations to the states– Collect from left state to right state.
• “Collect” – update parameters to correctly model the observations– Observation collection will give a distribution over states, given the initial
state– State collection will also give a distribution over states– the new q distribution will reflect the combination of these two
q1 q2 q3
x1 x2 x3

9
Forwards Backwards Algorithm
• Backwards-Step:– Distribute down to the observations from the states– Collect from left state to right state.
• “Distribute” – update parameters to correctly model the observations– Observation distribute updates the state-observation relationship– State distribution updates the state-state transition matrix
• Forward-backwards can be shown to converge in one pass.
q1 q2 q3
x1 x2 x3

10
Finite State Automata
• “Start” “Accept” States• Epsilon Transitions• Relationship to Regular Expressions• Operations on FSA
– Addition– Inversion– Node expansion– Determinization
• Weighted automata allow probabilities to be assigned to transitions

11
State transitions as FSA
/d/ /t//ey/ /ax/
/ae/ /dx/

12
Word FSA to phone FSA
/d/ /t//
ey//
ax/
/ae/ /dx/
MORE DATA
/m/ /ao/ /r/

13
Word FSA to phone FSA
/d/ /t//
ey//
ax/
/ae/ /dx/
/m/ /ao/ /r/

14
Decoding a Hidden Markov Model
• Decoding is finding the most likely state sequence.
• How many state sequences are there in a HMM with N observations and k states?

15
Viterbi Decoding
• Dynamic Programming can make this a lot faster.
• Idea: Any optimal sequence between x0 and xn must include the optimal sequence between xn and xn-1.– Based on the Markov Assumption.

16
Viterbi Decoding
• Probability of most likely state sequence
• Recovering the the optimal sequence involves storing pointers as decisions are made.

17
Example (from Wikipedia)states = ('Rainy', 'Sunny') observations = ('walk', 'shop', 'clean') start_probability = {'Rainy': 0.6, 'Sunny': 0.4} transition_probability = { 'Rainy' : {'Rainy': 0.7, 'Sunny': 0.3}, 'Sunny' : {'Rainy': 0.4, 'Sunny': 0.6},} emission_probability = { 'Rainy' : {'walk': 0.1, 'shop': 0.4, 'clean': 0.5}, 'Sunny' : {'walk': 0.6, 'shop': 0.3, 'clean': 0.1},}
What is the most likely state sequence?

18
HMM Topology for Training
• Rather than having one GMM per phone, it is common for acoustic models to represent each phone as 3 triphones
S1 S3S2 S4 S5
/r/

19
Flat Start
• In Flat Start training, GMM parameters are initialized to global means and variances.
• Viterbi is used to perform forced alignment between observations and phone sequence.– The phone sequence is derived from the
lexical transcription and pronunciation model

20
Forced Alignment
• Given a phone sequence and observations, assign each observation to a phone.
• Uses– Identifying which observation belong to
each phone label for later training– Getting time boundaries for phone or
word labels.

21
Flat Start
• In Flat Start training, GMM parameters are initialized to global means and variances.
• Viterbi is used to perform forced alignment between observations and phone sequence.– The phone sequence is derived from the
lexical transcription and pronunciation model
• After alignment, retrain Acoustic Models, and repeat.

22
What about silence?
• If there is no “silence” state, the silent frames will be assigned to either the /d/ or the /ax/
• This leads to worse acoustic models.• A solution: Explicit training of silence models, /sp/
– Allowing /sp/ transitions at word boundaries
/d/ /ey/ /dx/ /ax/ /d/ /ey/ /dx/ /ax/ /d/ /ey/ /dx/ /ax/

23
Next Class
• Pronunciation Modeling• Reading: J&M Chapter 2,
Section10.5.3, 11.1, 11.2