shape background modeling : the shape of things …cs.uky.edu/~jacobs/papers/jacobs_wmvc07.pdfshape...
TRANSCRIPT

Shape Background Modeling : The Shape of Things That Came
Nathan Jacobs and Robert PlessDepartment of Computer Science and Engineering
Washington University, St. Louis, MO, 63117
Abstract
Detecting, isolating, and tracking moving objects in an out-door scene is a fundamental problem of visual surveillance.A key component of most approaches to this problem is theconstruction of a background model of intensity values. Wepropose extending background modeling to include learn-ing a model of the expected shape of foreground objects.This paper describes our approach to shape description,shape space density estimation, and unsupervised modeltraining. A key contribution is a description of propertiesof the joint distribution of object shape and image location.We show object segmentation and anomalous shape detec-tion results on video captured from road intersections. Ourresults demonstrate the usefulness of building scene-specificand spatially-localized shape background models.
1. IntroductionDetecting, isolating and tracking objects as they movethrough a scene is a common requirement of security andsurveillance systems. When security systems are installedfor very long terms use (days, months or years), it is fea-sible to initially spend substantial computing resources tofacilitate later processing. While effort has been spent todevelop background models to support object and anomalydetection [9, 3, 10], and to characterize motions in ascene [6, 5, 7], little attention has been paid to the fact thatother properties are consistent in a scene that is viewed bya static camera.
One such property is the shapes of objects that appear.For example, in a surveillance video of an intersection apixel location may see either the background road or a car.But all cars at this location are moving the same directionand in the same relative orientation, so the space of shapesseen at this pixel may be quite limited. How can these shapespaces be acquired, represented, and used?
This paper presents a process that includes offline meth-ods for learning and characterizing the distributions ofshapes that appear in a scene, and faster methods to usethese shape models to support accurate segmentation inchallenging conditions. We attempt to characterize the ben-efits of scene-specific shape models for object localization
Figure 1: A collection of spatially-localized mean shapes—the mean of shapes with centroids within the surrounding30 by 30 pixel region—from a video of a vehicular inter-section. In this work the dependence of shape statistics onimage location is used to improve object segmentation.
and anomaly detection. Furthermore, we find that locationspecific shape models (i.e. that give distribution of shapeswhose centroid is near an image location) are both easy tocompute and provide extremely strong shape constraints.
This is preliminary work on shape background model-ing. Therefore we have kept our methods simple to avoidobscuring the core message that a shape background modelis useful without the need for complicated methods. In fu-ture work we will address more sophisticated methods ofbuilding and using shape background models.
1.1. Previous WorkThere are many approaches to building pixel-level modelsof typical, background, properties of a given video. Mostapproaches focus on building models of densely sampleddata such as pixel intensity [9, 3, 10] or motion proper-ties [6, 7].
Anomalous object detection is one goal of surveillance,and most research has focussed on building backgroundmodels that support real-time classification of atypicalscene behavior, based on, for example, statistics of pixelintensity [9], spatio-temporal intensity derivatives [7], orglobal scene appearance [12]. More power is available inmodeling the statistics of foreground objects detected in the
1

scene. Mostly these models concentrate on object motions.A mixture model is used to define a PDF over the position,velocity, size, and aspect ratio of many blobs tracked overtime to support classifying scene activities [9], and simi-lar measurements have been used to derive an HMM overglobal scene states [1].
The use of statistical shape priors has been shown toimprove the ability of object segmentation algorithms tohandle ambiguous image data [4, 2] and overlapping ob-jects [11]. Our segmentation approach incorporates energyfunctionals inspired by these works but takes a simpler ap-proach to energy minization. Previous work has focused onsophisticated methods of energy minimization while ignor-ing the dependence of shape and location.
The use of spatially-uniform shape priors learned frommotion segmentation to improve the accuracy of static ob-ject segmentation has been explored by Ross and Kael-bling [8]. The shape prior is combined with image data anda segmentation is determined by performing energy miniza-tion on a Markov random field.
We believe the results in this paper argue that includ-ing richer models of foreground shapes in scene modelingwould support more specific anomaly detection in additionto improving the initial segmentation of objects from thebackground.
2. Shape Background ModelingIn this section we describe a simple shape descriptor anda method for estimating a scene-specific and spatially-localized probability distribution over the space of shapes.As with most intensity background modeling approaches, adensity estimate is constructed from a set of training exam-ples.
2.1. Building a Training SetDuring the training phase, foreground blobs are extractedand a shape descriptor is built for each blob. For a givenimage we extract foreground blobs by sutracting a meanimage, thresholding the difference, and a performing a mor-phological close operation but any method that produces abinary foreground mask could be used. A given blob is de-scribed by its centroid xi and a set of shape parameters θi.The shape descriptor θi = li,1, . . . , li,n describes a poly-gon where li,j is the distance from xi to the edge of theblob in direction αj ∈ [0, . . . , 2π), for all results in thispaper n = 20 and values are evenly sampled. See Fig-ure 2(c) for an example of the descriptor. We use a simplefinite-dimensional shape space but other shape descriptorsare possible including implicit shape descriptors, such assigned distance functions.
(a)
(b) (c)
Figure 2: Shape descriptors are extracted from imagedata using background subtraction. (a) An example im-age region containing a foreground object. (b) The imageregion in (a) with each pixel labeled as either foreground,the blob, or background using a background model. (c) Theapproximation shape descriptor for the blob (b).
2.2. Building the Shape EigenspaceIn order to improve the robustness of density estimation itis desirable to reduce the dimensionality of our shape de-scriptor. Our approach is to perform PCA on shapes neara pixel location x to determine a low-dimensional shapeeigenspace. We begin by formally defining a spatial-supportfunction that defines the meaning of near in our approach.
The influence of shape θi on the shape backgroundmodel at pixel x is determined by a support functionw(x, xi). We primarily use a simple support function wrthat includes only shapes within a radius r of a given point:
wr(x, xi) =
{1 if ||x− xi|| ≤ r0 otherwise
(1)
where ||.|| is the Euclidean distance between pixels and ris adjusted to give a sufficient number of training examples.Note that w∞ is 1 for all shapes, wherever they occur.
Given an image location x and a support function wr thenext step is creating a low-dimensional subspace that is use-ful for shapes centered at x. We use a PCA decompositionof all shapes within a radius r of x, i.e. the subset of thetraining set T = {θi|wr(x, xi) 6= 0}. Using the PCA de-composition, the shape descriptor θi relative to pixel x canbe written as:
θi = θµ +n∑
j=1
λjβi,jψj (2)
2

(a) (b)
(c) (d)
Figure 3: Shapes reconstructed using PCA by varyingthe coefficients of the first (a) and second (b) principalcomponents. From these images we can see that shape sub-spaces in the top row have much lower variance than thosein the bottom two rows. This spatial dependence is the nat-ural result of traffic patterns in the intersection. The shapepriors in the top row describe cars all traveling in the samedirection, either around a corner or in a lane, while the shapepriors in the bottom two rows describe cars traveling in twodifferent directions.
where ψj is a principal component and λj is the correspond-ing eigenvalue. The projection of each shape θi along theprincipal direction ψj is the coefficient βi,j .
Before discussing ways to use this decomposition forsegmentation and anomalous shape detection, we will firstdescribe properties of the principal directions ψ and theshape parameters β for eigenspaces constructed from real-world videos.
3. Properties of Shape EigenspacesIn this section we describe properties of automatically gen-erated shape eigenspaces, i.e. we examine the values of thecoefficients in Equation 2. We begin by directly examiningseveral shape eigenspaces and the coordinates of the train-ing shapes within these eigenspaces.
3.1. Eigenspace Basis VectorsFigure 3 contains visualizations of the shape eigenspacesbuilt with shapes extracted from a video of a vehicular in-tersection using either support function w∞ (global) or w20(local).
The eigenspaces built with support function w20 showthe dependence between shape eigenspace and image loca-
tion. The first thing to notice is that the mean shapes (black-dashed line) are different at different image locations. In ad-dition the principal modes of variations are dependent uponimage location. In the middle of the intersection the secondprincipal direction encodes for the orientation of the eachshape. However, near the top of the image, where cars areprimarily traveling in the same direction, the variation dueto orientation is much smaller. Note that although a sub-space is constructed for each pixel only a subset, sampledevery 20 pixels, of the subspaces is shown.
The eigenspace built using w∞, i.e. all shapes in thetraining set, show that the average shape is approximatelyan oval with a horizontal long axis, the principle mode ofvariation is size of the shape, and the second principle modeof variation is the orientation of the shape. This eigenspace,computed over the whole image, provides a data-drivenscene specific model of foreground shapes.
3.2. Shape Coordinates in EigenspaceWe now explore the coordinates of the shapes in the train-ing set with the scene-specific, but spatially-uniform, shapeeigenspace constructed from the entire training set, i.e. us-ing spatial support function w∞. Figure 4 contains twoplots that show a randomly chosen subset of the trainingshapes. Each point represents a shape in the training set andthe coordinates of each point corresponds to the pixel lo-cation of the shape centroid. Figure 4(a) shows that thereis a strong dependence between the first eigenspace coordi-nate, the color of the point, and the y-axis location of theshape centroid. Figure 4(b) shows that the dependence ofthe second eigenspace coordinate and location is not linear.The second eigenvector largely encodes for the orientationof the shape, i.e. which road is it on.
We have shown much can be learned about the fore-ground objects in a scene by manual inspection ofshape eigenspace bases and shape coordinates within theeigenspaces. Understanding the dependence of shape coor-dinates and image location is key to building accurate shapebackground models. Next we describe methods for usingshape background models to improve the accuracy of seg-mentation and to enable anomalous shape detection.
4. ApplicationsIn this section we show how to use shape background mod-els to improve object segmentation and enable detection ofanomalous shapes.
4.1. DatasetsOur dataset consists of two videos, both of which were cap-tured by a static camera with an overhead view of a roadintersection. The majority of foreground objects in bothscenes are vehicles, although some pedestrians are present.
3
(a) PC 1 Coefficient (b) PC 2 Coefficient
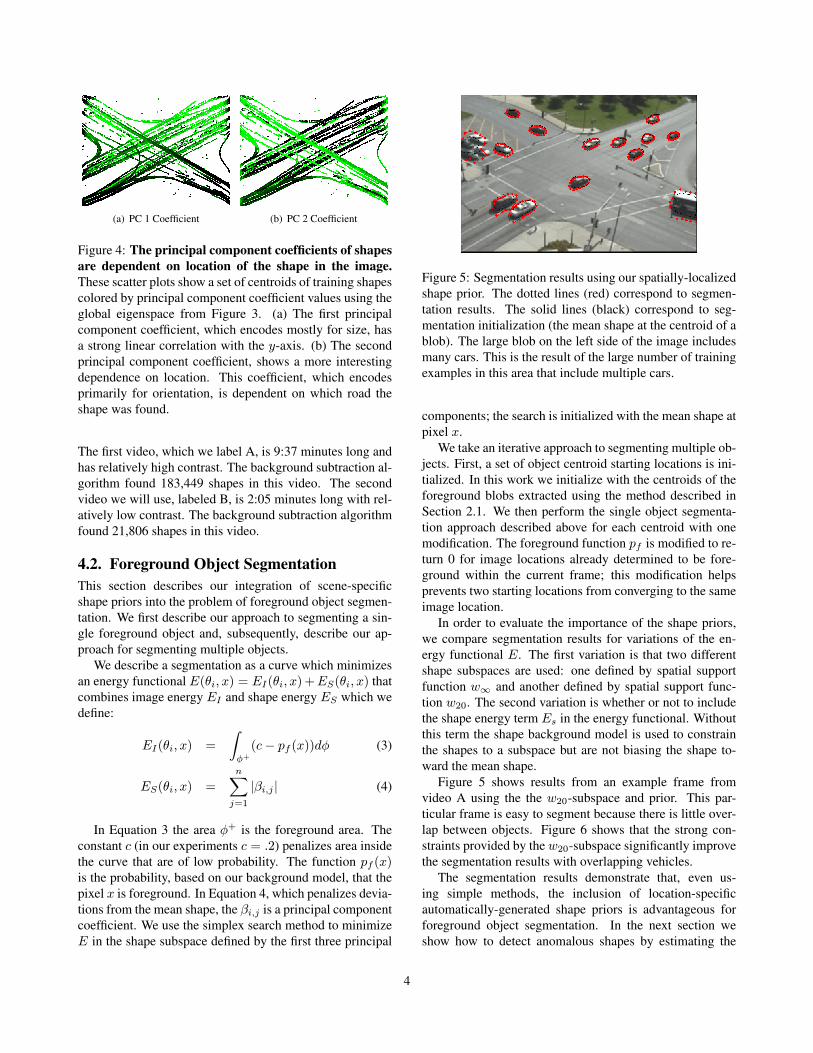
Figure 4: The principal component coefficients of shapesare dependent on location of the shape in the image.These scatter plots show a set of centroids of training shapescolored by principal component coefficient values using theglobal eigenspace from Figure 3. (a) The first principalcomponent coefficient, which encodes mostly for size, hasa strong linear correlation with the y-axis. (b) The secondprincipal component coefficient, shows a more interestingdependence on location. This coefficient, which encodesprimarily for orientation, is dependent on which road theshape was found.
The first video, which we label A, is 9:37 minutes long andhas relatively high contrast. The background subtraction al-gorithm found 183,449 shapes in this video. The secondvideo we will use, labeled B, is 2:05 minutes long with rel-atively low contrast. The background subtraction algorithmfound 21,806 shapes in this video.
4.2. Foreground Object SegmentationThis section describes our integration of scene-specificshape priors into the problem of foreground object segmen-tation. We first describe our approach to segmenting a sin-gle foreground object and, subsequently, describe our ap-proach for segmenting multiple objects.
We describe a segmentation as a curve which minimizesan energy functional E(θi, x) = EI(θi, x) +ES(θi, x) thatcombines image energy EI and shape energy ES which wedefine:
EI(θi, x) =
∫
φ+(c− pf (x))dφ (3)
ES(θi, x) =n∑
j=1
|βi,j | (4)
In Equation 3 the area φ+ is the foreground area. Theconstant c (in our experiments c = .2) penalizes area insidethe curve that are of low probability. The function pf (x)is the probability, based on our background model, that thepixel x is foreground. In Equation 4, which penalizes devia-tions from the mean shape, the βi,j is a principal componentcoefficient. We use the simplex search method to minimizeE in the shape subspace defined by the first three principal
Figure 5: Segmentation results using our spatially-localizedshape prior. The dotted lines (red) correspond to segmen-tation results. The solid lines (black) correspond to seg-mentation initialization (the mean shape at the centroid of ablob). The large blob on the left side of the image includesmany cars. This is the result of the large number of trainingexamples in this area that include multiple cars.
components; the search is initialized with the mean shape atpixel x.
We take an iterative approach to segmenting multiple ob-jects. First, a set of object centroid starting locations is ini-tialized. In this work we initialize with the centroids of theforeground blobs extracted using the method described inSection 2.1. We then perform the single object segmenta-tion approach described above for each centroid with onemodification. The foreground function pf is modified to re-turn 0 for image locations already determined to be fore-ground within the current frame; this modification helpsprevents two starting locations from converging to the sameimage location.
In order to evaluate the importance of the shape priors,we compare segmentation results for variations of the en-ergy functional E. The first variation is that two differentshape subspaces are used: one defined by spatial supportfunction w∞ and another defined by spatial support func-tion w20. The second variation is whether or not to includethe shape energy term Es in the energy functional. Withoutthis term the shape background model is used to constrainthe shapes to a subspace but are not biasing the shape to-ward the mean shape.
Figure 5 shows results from an example frame fromvideo A using the the w20-subspace and prior. This par-ticular frame is easy to segment because there is little over-lap between objects. Figure 6 shows that the strong con-straints provided by the w20-subspace significantly improvethe segmentation results with overlapping vehicles.
The segmentation results demonstrate that, even us-ing simple methods, the inclusion of location-specificautomatically-generated shape priors is advantageous forforeground object segmentation. In the next section weshow how to detect anomalous shapes by estimating the
4

Global subspace constraint Global subspace and prior Local subspace constraint Local subspace and prior
Figure 6: Segmentation results containing two nearby cars that demonstrate the effectiveness of using a location-dependent shape background model. In all images the dotted line (red) corresponds to the final segmentation results andthe solid line (black) corresponds to the segmentation initialization. The objects in the bottom row of images are difficult tosee because of the low contrast in the original video. These figures demonstrate two features of using a location-dependentshape background model: better initialization and better final segmentation.
joint probability of shape and location.
4.3. Anomalous Shape DetectionIn this section we describe a method for detecting anoma-lous shapes using a location-specific shape backgroundmodel and show promising detection results.
We define anomaly detection in a probabilistic frame-work by labelling shapes as anomalous if they are of suffi-ciently low probability with respect to the conditional prob-ability p(θ|x) of object shape given object centroid imagelocation. Estimation of the density is problematic given thesparsity of training examples and the high-dimensionality ofthe space—recall that θ is a 20-dimensional shape descrip-tor. In order to improve the robustness of model parameterestimation we make a number of modifications:
• We assume that p(θ|x) is constant within a small re-gion defined by support functionw, therefore p(θ|x) ≈px(θ). This notational change emphasizes the fact thatwe now estimate model parameters using all shapeswithin the region defined by w.
• We reduce dimensionality by using a subset of thelocal eigenspace coordinates of θ, more formallypx(θ) ≈ px(β1, . . . , βm) where βi is a coordinate ina shape eigenspace built from shapes in the support re-gion defined by w.
• We assume shape eigenspace coordinates are drawn in-dependently from a multivariate Gaussian with mean µand covariance Σ.
Using these assumptions we consider a shape θ anoma-
(a) (b) (c) (d)
Figure 7: Detecting anomalous foreground objects us-ing shape priors. (top) A scatter plot of the first and sec-ond principal component coefficients of all shapes with cen-troids in a small portion of the image. The color of eachpoint reflects when the shape was seen. The dashed ellipsesare the first and second standard error ellipses. (a) A typi-cal car shape. (b) An example from a collection of outliershapes; in each case the underlying object is a bus. From thescatter plot (top) it is evident that two buses passed throughthe image at different timestamps. (c) An example of a ve-hicle towing another vehicle. (d) An example of a incorrectsegmentation caused by overlapping.
5

lous if the Mahalanobis distance
d(θ, µ) =
√(θ − µ)TΣ−1(θ − µ)
between the shape and the mean shape µ is greater thansome constant k, we use k = 2.
Figure 7 shows anomaly detection results for a givensub-window of the video A. The axes are the first and sec-ond eigenspace coefficients of all shapes with centroids inthe sub-window. Using these simple methods we easily de-tect two types of anomalous shapes: buses and vehicles tow-ing other vehicles.
5. Future WorkWe have intentionally kept algorithms simple to emphasizethe strength of the shape background models. This approachleaves open several directions for future work.
Our current density estimation approach assumes thatshapes are independent random draws from a Gaussian dis-tribution. We have shown that this assumption is reasonble,however, there is room for improvement. An example ofan image location that violates this assumption is in a traf-fic intersection where vehicles are clustered in several dis-crete orientations. This points to the need for a local mixturemodel to better describe the set of previously seen shapes.
We also make the assumption that the distribution ofshapes is independent of time but this assumption is of-ten incorrect. For example, the distribution of shapes inthe middle of an intersection is dependent on the state ofthe traffic signals. Anomaly detection results, for example,would be more accurate if this state was known because lessvariation would be caused by object orientation.
Lastly, we have chosen a simple spatial support functionwhich is binary valued and location independent. We planto investigate spatial support function that are based on sim-ilarity of image regions.
6. ConclusionThis work shows that scene-specific and spatially-localizedshape background models can be used to improve the ac-curacy of object segmentation and enable anomalous shapedetection. In addition, we have shown that automatic gener-ation of a set of training shapes using pixel intensity back-ground modeling is sufficient for model parameter estima-tion.
Our focus in this work has been to explore the capabili-ties of such a background model while still using straight-forward methods. We believe that these initial results arguefor further investigation of local shape background models.
References[1] M. Brand and V. Kettnaker. Discovery and segmentation of
activities in video. IEEE Transactions on Pattern Analysisand Machine Intelligence, 22(8):844–851, 2000.
[2] D. Cremers, F. Tischhaueser, J. Weickert, and C. Schnorr. In-ternational Journal of Computer Vision, 50(3):295–313, De-cember 2002.
[3] A. Elgammal, R. Duraiswami, D. Harwood, and L. S. Davis.Background and foreground modeling using nonparametrickernel density for visual surveillance. In Proceedings of theIEEE, volume 90, pages 1151–1163, July 2002.
[4] M. E. Leventon, W. E. L. Grimson, and O. Faugeras. Sta-tistical shape influence in geodesic active contours. In Proc.IEEE Conference on Computer Vision and Pattern Recogni-tion, pages 316–323, June 2000.
[5] A. Mittal and N. Paragios. Motion-based background sub-traction using adaptive kernel density estimation. In Proc.IEEE Conference on Computer Vision and Pattern Recogni-tion, pages 302–309, 2004.
[6] A. Monnet, A. Mittal, N. Paragios, and V. Ramesh. Back-ground modeling and subtraction of dynamic scenes. InProc. International Conference on Computer Vision, pages1305–1312, 2003.
[7] R. Pless, J. Larson, S. Siebers, and B. Westover. Evalua-tion of local models of dynamic backgrounds. In Proc. IEEEConference on Computer Vision and Pattern Recognition,volume 2, pages 73–78, 2003.
[8] M. G. Ross and L. P. Kaelbling. Learning static object seg-mentation from motion segmentation. In Proc. NationalConference on Artificial Intelligence, 2005.
[9] C. Stauffer and W. E. L. Grimson. Adaptive backgroundmixture models for real-time tracking. In Proc. IEEE Con-ference on Computer Vision and Pattern Recognition, pages2246–2252, 1999.
[10] K. Toyama, J. Krumm, B. Brumitt, and B. Meyers.Wallflower: Principles and practice of background mainte-nance. In Proc. International Conference on Computer Vi-sion, pages 255–261, 1999.
[11] Q. Zhang and R. Pless. Segmenting multiple familiar ob-jects under mutual occlusion. In Proc. IEEE InternationalConference on Image Processing, October 2006.
[12] J. Zhong and S. Sclaroff. Segmenting foreground objectsfrom a dynamic textured background via a robust kalmanfilter. In Proc. European Conference on Computer Vision,pages 44–50, 2003.
6