shape optimization of two-dimensional cavitators in supercavitating flows, using nsga ii algorithm
DESCRIPTION
The reduction of energy consumption of high speed submersible bodies is an important challengein hydrodynamic researches. In this paper, shape optimization of two-dimensional cavitators insupercavitating flows is studied. A two dimensional supercavitation potential flow passes a symmetrictwo dimensional cavitator, which is placed perpendicular to the flow in a channel of infinite length andimmediately a cavity is formed behind the cavitator. This is because of the generation of a gas or vaporcavity between the body and the surrounding liquid due to the change in a high speed flow directionpassing the cavitator. Drag force acting on this supercavitating body dictates the thrust requirements forthe propulsion system, to maintain a required cavity at the operating speed. Therefore, any reductionin the drag force, by modifying the shape of the cavitator, will lead to decrease this force. This studyconcentrates on the optimization of two dimensional cavitators in order to decrease drag coefficientfor a specified after body length and velocity in a potential flow. To achieve this goal a multi-objectiveoptimization problem is defined to optimize cavitator shapes in supercavitating flow. The so-called NSGAII (Non-dominated Sorting Genetic Algorithm) algorithm is used as an optimization method. Designparameters and constraints are obtained according to supercavitating flow characteristics and cavitatormodeling and objective functions are generated using Linear Regression Method. The obtained results arecompared with other classic optimization methods, like the weighted sum method, for validation.TRANSCRIPT

Applied Ocean Research 30 (2008) 305–310
Contents lists available at ScienceDirect
Applied Ocean Research
journal homepage: www.elsevier.com/locate/apor
Shape optimization of two-dimensional cavitators in supercavitating flows,using NSGA II algorithmR. Shafaghat ∗,1, S.M. Hosseinalipour 2, N.M. Nouri 3, I. Lashgari 4Department of Mechanical Engineering, Iran University of Science and Technology, Iran
a r t i c l e i n f o
Article history:Received 2 July 2008Received in revised form11 January 2009Accepted 22 February 2009Available online 2 May 2009
Keywords:Multi-objective optimizationSupercavitationTwo dimensional cavitatorDrag coefficientCavitation number
a b s t r a c t
The reduction of energy consumption of high speed submersible bodies is an important challengein hydrodynamic researches. In this paper, shape optimization of two-dimensional cavitators insupercavitating flows is studied. A two dimensional supercavitation potential flow passes a symmetrictwo dimensional cavitator, which is placed perpendicular to the flow in a channel of infinite length andimmediately a cavity is formed behind the cavitator. This is because of the generation of a gas or vaporcavity between the body and the surrounding liquid due to the change in a high speed flow directionpassing the cavitator. Drag force acting on this supercavitating body dictates the thrust requirements forthe propulsion system, to maintain a required cavity at the operating speed. Therefore, any reductionin the drag force, by modifying the shape of the cavitator, will lead to decrease this force. This studyconcentrates on the optimization of two dimensional cavitators in order to decrease drag coefficientfor a specified after body length and velocity in a potential flow. To achieve this goal a multi-objectiveoptimization problem is defined to optimize cavitator shapes in supercavitating flow. The so-called NSGAII (Non-dominated Sorting Genetic Algorithm) algorithm is used as an optimization method. Designparameters and constraints are obtained according to supercavitating flow characteristics and cavitatormodeling and objective functions are generated using Linear RegressionMethod. The obtained results arecompared with other classic optimization methods, like the weighted sum method, for validation.
© 2009 Elsevier Ltd. All rights reserved.
1. Introduction
Supercavitation is the cavitation effects which create a largebubble of gas inside a liquid, allowing an object to travel at greatspeed through the liquid by being engulfed by the bubble. Thecreation of the cavity (i.e., the bubble) reduces the total drag on theobject and this makes supercavitation an attractive phenomena.In recent years, supercavitation has attracted growing interestdue to its potential for vehicle maneuvering and drag reduction.Many problems in cavitation (e.g., cavitating flows aroundhydrofoils and bodies of revolution, design of supercavitatingfoils, ventilated cavities, etc.) have been investigated in detailboth experimentally and theoretically. However, there are stillmany more problems that require more careful research [1].In the past, the hydrofoil propeller design philosophy was toavoid cavitation for a widespread range of operating conditions.
∗ Corresponding author.E-mail address: [email protected] (R. Shafaghat).
1 Ph.D. Student.2 Assistant Professor.3 Assistant Professor.4 MSc. Student.
0141-1187/$ – see front matter© 2009 Elsevier Ltd. All rights reserved.doi:10.1016/j.apor.2009.02.005
However, nowadays demands for underwater vehicle speeds andhigher propeller efficiency have made this design philosophypractically impossible to apply. The efficiency of a non-cavitatinghigh-speed propeller is relatively low, due to the required largeblade area that leads to high frictional losses. Therefore the twodimensional supercavitating hydrofoils with controlled amountsof cavitation are utilized for designing propellerswith a small bladearea. A numerical optimization technique is applied to the designof two-dimensional supercavitating hydrofoil sections (Fig. 1).The drag coefficient of a cavitator is one of the most importantcharacteristics of supercavitating flows. Usually the drag can becharacterized as pressure drag and viscous drag. In the case ofsupercavitation, the pressure drag is considerably much higherthan the viscous drag, since the body does not come into contactwith the fluid [15]. In a special cavity, the length of the dragcoefficient is a function of cavitator geometric parameters. In orderto find the best cavitator shape in special conditions,wehave to usean optimization process.
2. Literature review
Early research on supercavitating flows was performed byReichardt [1], who experimentally studied the axisymmetric su-percavitating flows. Efros [2] employed conformal mapping tech-niques to investigate the supercavitating flow problems. Tulin [3]introduced the use of perturbationmethods for examination of two

306 R. Shafaghat et al. / Applied Ocean Research 30 (2008) 305–310
Fig. 1. Two-dimensional supercavitating hydrofoil sections.
Nomenclature
Cd Drag CoefficientD Dragd Cavitator heightl Cavity lengthP Half height of cavitatorPC Cavity PressurePd Pressure on the cavitatorP∞ Far field pressureqc Velocity on the cavityU∞ Far field vlosityx Control pointω Weight of each pointρ Densityσ Cavitation numberψ Stream function
dimensional supercavitating flows. Cuthbert and Street [4] usedsources and sinks along the axis of a slender axisymmetric bodycavity system, along with a Riabouchinsky cavity closure model.They solved the problem for the unknown cavity shape, but theywere successful only for few cases. Brennan [5] employed a re-laxation method in a transformed velocity potential-stream func-tion plane for analyzing axisymmetric cavitating flows behind adisk and a sphere between solid walls. Chou [6] extended the workof Cuthbert and Street [4] to solve axisymmetric supercavitatingflows using slender body theory. Until the 1970s, the analyticalmethods were the most important ones to solve the supercavitat-ing flow problems. Beginning in 1980, some numerical methodswere also developed. Aitchison [7] used amethod of variable finiteelements to consider the flowpast a disk in a tube of finite diameterand infinite length. Uhlman [8] used the surface singularitymethodto solve the fully nonlinear potential flow past a supercavitatingflat-plate hydrofoil numerically. Hase [9] employed Interior sourcemethods for modeling the planar and axisymmetric supercavitat-ing flows. Verghese, Uhlman and Kirschner [10] used the boundaryelementmethod for numerical analysis of high speed bodies in par-tially cavitating axisymmetric flow. Shafaghat et al. [11] used theboundary element method for numerical analysis of two dimen-sional bounded supercavitating flows.The propulsion system provides the required thrust which is
proportional to the drag which is exerted on the body. This actkeeps the high speed motion of the body. Thus any decreasein the thrust by modifying the shape of cavitator is desirable.Kinnas et al. [12] and Mishima & Kinnas [13] studied theflow around the supercavitating hydrofoils and supercavitating
wings and obtained the optimized shape of hydrofoils, usingLagrange multiplier method. Mishima [14] presented his studieson cavitator modeling and hydrofoil optimization using a methodof multipliers and a penalty parameter update scheme in bothconstrained and unconstrained optimization problems. Alyanaket al. [15] have designed the variable shape of cavitators. They haveadjusted the cavitator parameters to obtain an optimized cavitatorshape of a supercavitating torpedo. They introduced some non-dimensional parameters in their cavitator modeling [16]. Choi [17]has investigated the cavitator shape optimization procedure usingdesign sensitively analysis. He used a different method for thegeometric definition of the cavitator in his work. It is noticeablethat all researchers have used a type of gradient methodsto optimize the cavitators or hydrofoils shape. These methodshave been generally criticized for their problems with obtainingoptimum points in uneven and uncontained objective functions.So a non-gradient method is considered in this paper. The genetic-base optimization methods utilize a sorting algorithm to obtainoptimum points in domains of interest. In this study, a multi-objective genetic algorithm is selected to optimize the cavitatorshape.It is confirmed by previous studies that the potential flow
assumption is accurate enough for supercavitating flows analysis.Usually the main parameters in supercavitating flows are thegeometry of cavity and cavitator and also the cavitation number.Having specified the objective functions and the design
parameters, a multi-objective optimization procedure is used inorder tominimize the drag coefficient andmaximize the cavitationnumber. The required input data for this investigation areproduced using a BEM supercavitating flow software (developedby the authors) [11] and the so called NSGA II [18,19] optimizationalgorithm.
3. Supercavitating flow modeling
Supercavitation is a phenomenon in which a cavity is formedbehind a moving body in the water (Fig. 2). As the body isenveloped inside the cavity and there is no direct contact betweenthe body surface and the water, the the hydrodynamic drag is theonly type of drag which has to be considered in such flows [17].This is obtained by integration of the pressure distribution over thecavitator, as defined in Eq. (1).
Cd =D
12ρU
2∞d=2d
∫ d2
0
Pd − PC12ρU
2∞
dy. (1)
The shape of the cavitators not only affects the cavity size but alsodetermines the magnitude of the drag exerted on it. In this study

R. Shafaghat et al. / Applied Ocean Research 30 (2008) 305–310 307
Fluid
Cavity
Body
motion of body
Fig. 2. Supercavitating body in cavity.
E
D
C
F
H
AGB L
b
d
a
Fig. 3. Definition of the problem region [11].
the optimum cavitator shapes are developed for predeterminedthe cavity lengths.The governing equations and the appropriate boundary condi-
tions for a potential flow across the cavitator and the supercavita-tion bubble are summarized as the following, (Fig. 3).
∇2ψ =
∂2ψ
∂x2+∂2ψ
∂y2= 0 in ABCDEFA
ψ = 0 on AB, BC, CD∂ψ
∂n= 0 on AF, DE
ψ = 1 on EF∂ψ
∂n= −qc on CD.
(2)
Based on the above equations, software is developed in whichthe cavity shape can be determined for a predetermined cavitatorshape and supercavity bubble length using an iterative method byfollowing the convergence criteria:
1. Impermeability in cavity boundary.2. Constant pressure in cavity boundary.
4. Cavitator modeling
A curve fit procedure being applied on a number of specificpoints for the cavitator geometry is used in order to define thecomplete geometry. The rational parabolic curve is employed inthis study (Fig. 4).
x(η) =(1− η)2x1ω1 + 2η(1− η)x2ω2 + η2x3ω3(1− η)2ω1 + 2η(1− η)ω2 + η2ω3
(3)
where x1 = (−b1, 0), x2 = (−b1, b2), x3 = (0, 1), ω1 = 1and ω3 = 1. In this equation, x1 to x3 are the control points todescribe quadratic curve, andω1 toω3 be the weight of each point.The design parameters are b1, b2 and ω2 is the weight value forthe second point, x2. If ω2 increase, then the curve shape get closerto x2, whereas if ω2 decreases to zero, the curve becomes just astraight line connecting x1 and x3.Therefore the cavitator geometry is determined by three
parameters, b1, b2 and ω2.
r
z
X3
X2
X1
b2
b1
Fig. 4. Cavitator geometrical modeling.
5. Shape optimization problem
The main parameters in the shape optimization problem aredefined as the following:
- Cd: Drag coefficient- l/d: Ratio off cavity length to cavitator width- σ : Cavitation number- b1, b2 and ω2: Cavitator geometric parameters.
According to the definition of the cavitation number, σ isnormally defined based on free-stream velocity and far fieldpressure.
σ =P∞ − PC12ρU
2∞
.
However, considering a supercavitating object by specified cavitylength to cavitator width ratio, the geometrical parameters ofcavitators and the free stream physical conditions relate to eachother. It means that the cavitation number and geometricalparameters are accompanied to demonstrate cavity relative length.Therefore, when this length regarding a fix, the cavitation numbercan be a function of geometrical parameters of cavitator.In order to guarantee the physical solutions, the constraints are
to be specified exactly and correctly.According to the references [15,17] the best range of the l/d
ratio is defined as the following:
5 ≤ld≤ 20. (4)
The studied values for l/d ratios were 5, 10, 15 and 20 in thisresearch.Based on the previous experiences, the following values were
considered for geometric parameters as the necessary constraintsin this study:
0 ≤ b1 ≤ 10 ≤ b2 ≤ 10 ≤ ω2 ≤ 2.
(5)
It should be noted that b1 and b2 are normalized values using thecavitator width as the normalization parameter. Beyond a specificvalue of b1, the frictional loss on cavitator increases and thereforethe total drag coefficient will increase too.Different sets of input parameters were defined and applied
to the software in order to calculate the corresponding dragcoefficient and cavitation number for each set. The objectivefunctions were defined as follows:
Cd = f1(b1, b2, ω2)σ = f2(b1, b2, ω2).
(6)
As the velocity and energy consumption decreases with increasing
308 R. Shafaghat et al. / Applied Ocean Research 30 (2008) 305–310
the cavitation number, it is desirable to maximize the cavitationnumber. This causes the reduction of the drag coefficient. Finallythe optimization problem is defined as follows:
Min Cd = f1(b1, b2, ω2)Max σ = f2(b1, b2, ω2)0 ≤ b1 ≤ 10 ≤ b2 ≤ 10 ≤ ω2 ≤ 2
(7)
which is a multi-objective optimization problem.
6. Multi-objective optimization method (NSGA-II)
Over the past decade, a number ofmulti-objective optimizationalgorithms have been developed. These algorithms have the abilityto find Pareto-optimal solutions in one single run. These methodsgive a large number of alternative solutions lying on or near thePareto-optimal ant which produce valuable and practical values. Itshould be noted that all researchers have used a type of gradientmethods to optimize the cavitators or hydrofoils shape. Thesemethods have been generally criticized for their problems inobtaining optimum points in uneven and uncontained objectivefunctions. So a non-gradient method is considered in this paper.With respect to Eq. (7), the optimization problem is a multi-
objective problem. Since the principal reason why a problem hasa multi-objective formulation is because it is not possible to havea single solution which simultaneously optimizes all objectives, analgorithm that gives a large number of alternative solutions lyingon or near the Pareto-optimal front is of great practical value. Incontrast, the classic methods such as the weighted sum convertmulti-objective problem to a single objective and then optimizeit. These algorithms mostly offer a series of coefficients whichshould be selected by a designer in order to find a single solution ineach run. Therefore each solution is dramatically dependent on theamount of these coefficients. In the comparison chart, each pointof the results in the classical method is found separately due to thespecified amount of ‘‘m’’ factor (Eq. (8)).We have proposed a computationally fast elitistmulti-objective
algorithm based on a non-dominated sorting approach. With theproperties of a fast non-dominated sorting procedure, an elitiststrategy, NSGA-II will have increasing attention and application inthe near future. NSGA-II algorithms have the ability to find Pareto-optimal solutions in one single run.In NSGA-II method, once the population initialized, the
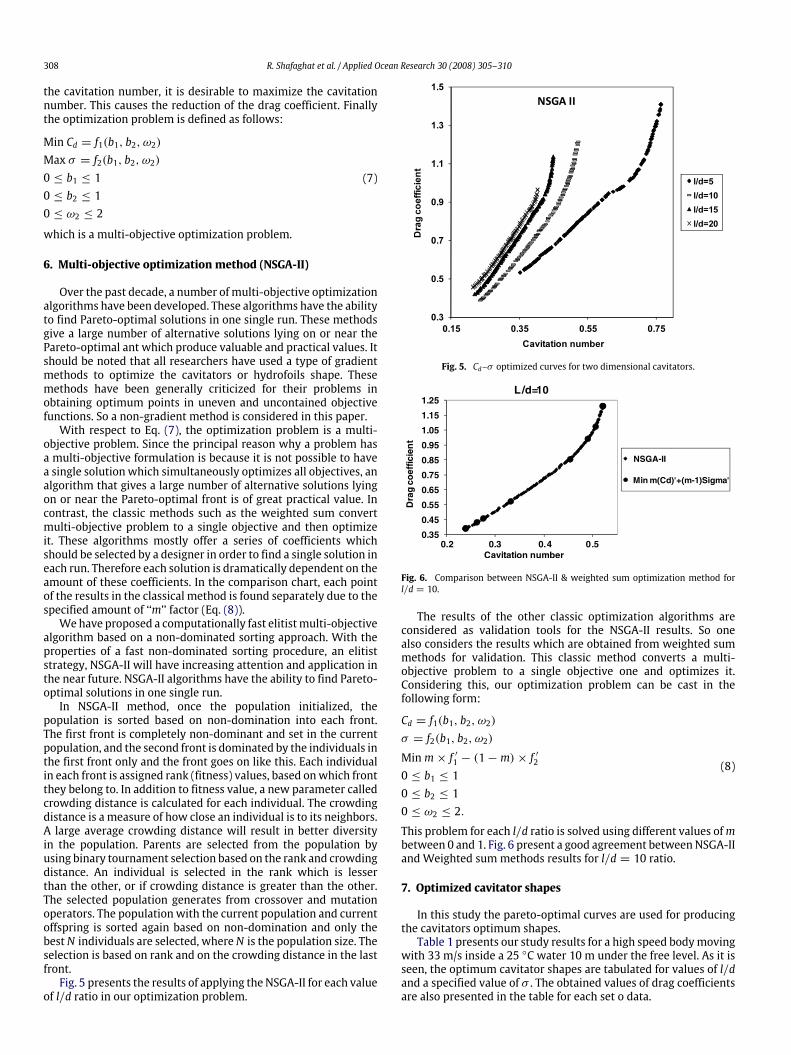
population is sorted based on non-domination into each front.The first front is completely non-dominant and set in the currentpopulation, and the second front is dominated by the individuals inthe first front only and the front goes on like this. Each individualin each front is assigned rank (fitness) values, based onwhich frontthey belong to. In addition to fitness value, a new parameter calledcrowding distance is calculated for each individual. The crowdingdistance is a measure of how close an individual is to its neighbors.A large average crowding distance will result in better diversityin the population. Parents are selected from the population byusing binary tournament selection based on the rank and crowdingdistance. An individual is selected in the rank which is lesserthan the other, or if crowding distance is greater than the other.The selected population generates from crossover and mutationoperators. The population with the current population and currentoffspring is sorted again based on non-domination and only thebest N individuals are selected, where N is the population size. Theselection is based on rank and on the crowding distance in the lastfront.Fig. 5 presents the results of applying the NSGA-II for each value
of l/d ratio in our optimization problem.
Fig. 5. Cd–σ optimized curves for two dimensional cavitators.
Fig. 6. Comparison between NSGA-II & weighted sum optimization method forl/d = 10.
The results of the other classic optimization algorithms areconsidered as validation tools for the NSGA-II results. So onealso considers the results which are obtained from weighted summethods for validation. This classic method converts a multi-objective problem to a single objective one and optimizes it.Considering this, our optimization problem can be cast in thefollowing form:
Cd = f1(b1, b2, ω2)σ = f2(b1, b2, ω2)
Minm× f ′1 − (1−m)× f′
2
0 ≤ b1 ≤ 10 ≤ b2 ≤ 10 ≤ ω2 ≤ 2.
(8)
This problem for each l/d ratio is solved using different values ofmbetween 0 and 1. Fig. 6 present a good agreement betweenNSGA-IIand Weighted sum methods results for l/d = 10 ratio.
7. Optimized cavitator shapes
In this study the pareto-optimal curves are used for producingthe cavitators optimum shapes.Table 1 presents our study results for a high speed bodymoving
with 33 m/s inside a 25 ◦C water 10 m under the free level. As it isseen, the optimum cavitator shapes are tabulated for values of l/dand a specified value of σ . The obtained values of drag coefficientsare also presented in the table for each set o data.

R. Shafaghat et al. / Applied Ocean Research 30 (2008) 305–310 309
Table 1Optimized two dimensional cavitators data for σ = 0.36.
Cavitation number= 0.36L/d= 5 L/d= 10 L/d= 15 L/d= 20b1 b2 w2 b1 b2 w2 b1 b2 w2 b1 b2 w2
1.00 0.51 1.86 0.69 0.58 1.99 0.42 0.66 1.98 0.36 0.77 1.63Cd= 0.5472 Cd= 0.6401 Cd= 0.7597 Cd= 0.8189
Fig. 7. Optimized two dimensional cavitators shape for σ = 0.36.
Fig. 8. Cavity detachment point for σ = 0.36.
Fig. 7 depicts the half upper part of cavitator shape, based onthe obtained geometric parameters.It should be noted that the cavities detachment points specify
the actual cavitator shape. According to Brillouin condition [20,21]for cavity detachment point, cavities start points are presented inFig. 8. Using this information, the final cavitator shape is presentedin Fig. 9.Table 2 presents the results for the second case in which
the drag coefficient is considered as a fixed value. It shouldbe noted that the drag coefficient dictates the propulsion force.Therefore, the cavitator shape is specified for each l/d ratio and itscorresponding cavitation number using Pareto optimal curves.Fig. 10 depicts the half upper part of cavitator shape, based on
the obtained geometric parameters.The final cavitator shape (using Brillouin detachment condition)
are presented in Fig. 11.
Fig. 9. Actual cavitator shape in a fixed cavitation number.
Fig. 10. Optimized two dimensional cavitators shape for Cd = 0.7.
Fig. 11. Actual cavitators shape for Cd = 0.7.
8. Conclusions
The results of a shape optimization problem for supercavitatingflows are presented in this paper using the NSGA-II optimizationtechnique. The main variables are the cavitators’ geometric

310 R. Shafaghat et al. / Applied Ocean Research 30 (2008) 305–310
Table 2Optimized two dimensional cavitators data for CD = 0.7.
Drag Coefficient= 0.7
L/d= 5 L/d= 10 L/d= 15 L/d= 20b1 b2 w2 b1 b2 w2 b1 b2 w2 b1 b2 w2
0.812 0.538 1.703 0.615 0.595 2 0.564 0.652 1.852 0.594 0.637 1.554Sigma= 0.4618 Sigma= 0.3855 Sigma= 0.3366 Sigma= 0.3215
parameters and the supercavitating flow characteristics, namelyσ and Cd. The regression method was used to produce the finalobjective functions for the problem in hand. Optimization of thecavitator shape to minimize drag, which is the main goal of thisstudy, was then carried out using a multi-objective optimizationtechnique, in which the drag coefficient was minimized whilethe cavitation number was maximized in a single optimizationroutine. The cavitator optimization was then carried out fora number of cavity lengths to cavitator ratios, based on theprevious investigationdata. Optimization results showed that, for aspecified cavitation number, as the required cavity length becomeslonger, the drag coefficient increases and the optimum shape ofcavitator changes froma long flat nose shape to a short smooth one.It also showed that for a specified drag coefficient, as the requiredcavity length becomes longer, the cavitation number decreases andthe optimumshape of cavitator changes froma long flat nose shapeto a short smooth one. The authors have extended this methodfor a three-dimensional supercavitating flow. According to thedefined problem, the concept and material of two-dimensionalcavitator optimization are used to achieve optimized curves foraxisymmetric cavitators.
References
[1] Reichardt H. The physical laws governing the cavitation bubbles producedbehind solids of revolution in a fluid flow. Rep. UM6628. Gottingen: The KaiserWilhelm Institute for Hydrodynamic Research; 1945.
[2] Efros DA. Hydrodynamic theory of two-dimensional flowwith cavitation. DoklAkad Nauk SSSR 1946;51:267–70.
[3] Tulin MP. Supercavitating flows—Small perturbation theory. J Ship Res 1964;7:3.
[4] Cuthbert J, Street R. An approximate theory for supercavitating flow aboutslender bodies of revolution. LMSC Report, TM81-73/39. Sunnyvale (CA):Lockheed Missiles and Space Co.; 1964.
[5] Brennen CA. Numerical solution of axisymmetric cavity flows. J Fluid Mech1969;37:671–88. 4.
[6] Chou YS. Axisymmetric cavity flows past slender bodies of revolution.J Hydronautics 1974;8:1.
[7] Aitchison JM. The numerical solution of planar and axisymmetric cavitationalflow problems. Comput & Fluids 1984;12(1):55–65.
[8] Uhlman JS. The surface singularity or boundary integral method applied tosupercavitating hydrofoils. J Ship Res 1989;33:1.
[9] Hase PM. Interior source methods for planar and axisymmetric supercavitat-ing flows. Thesis submitted for the degree of Doctor of Philosophy, May 2003.
[10] Verghese AN, Uhlman JS, Kirschner IN. Numerical analysis of high—Speedbodies in partially cavitation axisymmetric flow, transactions of ASME. J Eng2005;127:41–54.
[11] Shafaghat R, Hosseinalipour SM, Shariatifard A. Numerical analysis of a twodimensional bounded supercavitation flow. 15th Annual Conferences of theCFD Society of Canada; 2007.
[12] Kinnas SA, Mishima S, Savineau C. Application of optimization techniques tothe design of cavitating hydrofoils and wings. Department of Ocean Engineer-ing Massachusetts Institute of Technology, Present at the International Sym-posium on Cavitation Deauville, France, 2–5 May; 1995.
[13] Mishima Sh, Kinnas SA. A numerical optimization technique applied to thedesign of two-dimensional cavitating hydrofoil sections. J Ship Res 1995;September.
[14] Mishima Shigenori. Design of cavitating propeller blades in non-uniform flowby numerical optimization. For the Degree of Doctor of Philosophy at theMassachusetts Institute of Technology, June 1996.
[15] Alyanak Edward, Venkayya Vipperla, Grandhi Ramana, Penmetsa Ravi.Variable shape cavitator design for a supercavitating torpedo, department ofmechanical and material engineering. Dayton (U S): Wright State University,OH 45345.
[16] Alyanak Edward, Grandhi Ramana, Penmetsa Ravi. Optimum design of asupercavitatiting torpedo considering overall size, shape, and structuralconfiguration, Dayton,OH 45345 (United State): Department of mechanicaland material engineering, Wright State University; 22 July 2005.
[17] Choi JH, Penmetsa RC, Grandhi RV. Shape optimization of the cavitator for asupercavitating torpedo. Struct Multidisk Optim 29, 159–167. Aerospace andMechanical Engineering, Hankuk Aviation University; 2005.
[18] Deb Kalyanmoy, Agrawal Samir, Pratap Amrit, Meyarivan T. A fast elitist non-dominated sorting genetic algorithm for multi-objective optimization: NSGA-II. India: Indian Institute of Technology Kanpur, PIN 208 016; 2000.
[19] Seshadri Aravind. A fast elitist multiobjective genetic algorithm: NSGA-II.IEEE Transactions on Evolutionary Computation 2004;(April).
[20] Knapp RT, Dailly JW, Hammitt FG. Cavitation. McGrow-Hill Book Company;1970.
[21] ArmstrongAH. Abrupt and smooth separation in plane and axisymmetric flow.Memor Arm Res Est 1953; G.B. no. 22/63.