sinstesis_mecanismos
TRANSCRIPT

TEMA:Mecanismo de barrasALUMNOS:Guzmán MauroJimbo JaimeLuna CristianSarmiento JuanSisalima EdisonDOCENTE:Ing. NELSON JARACARRERA:Ingeniería AutomotrizCICLO:quinto ciclo
lunes 24 de octubre del 2011
TEMA: MECANISMO DE BARRAS

SINTESIS GRAFICA DE ESLABONAMIENTO
El diseño en ingeniería requiere técnicas de análisis pero no se puede analizar algo que no haya sido sintetizado
SINTESIS CUALITATIVA
Significa la creación de soluciones potenciales en ausencia de un algoritmo bien definido que configure o pronostique la solución.
Se debe trabajar con una solución potencial y juzgar su calidad.
Luego de un proceso de diseño (síntesis y diseño) SATISFECHO

Herramientas Dibujo en mesa o en (CAD) Modelarlo en cartón a escala Grafica animada Diseño rápido se vuelve (diseño
cualitativo mediante análisis sucesivo)
Es una iteración entre síntesis y análisis.
Soluciones por computadora(CAE)

SINTESIS DE TIPO
Es la definición del tipo apropiado do mecanismo mas adecuado para el problema(forma cualitativa)
Alternativas Un eslabonamiento rectilíneo( grande y
aceleraciones indeseables) Una leva y seguidor( barato, ruidoso
poco confiable)

Un cilindro neumático(barato, ruidoso y poco confiable)
Un cilindro hidráulico, un robot (muy caros)
Un solenoide ( barato pero con velocidades de carga de alto impacto)
Diseño un ejercicio de transacciones propuesta (soluciones positivas y negativas)
Costo y confiabilidad Recuerde un ingeniero puede hacer
con un dólar lo que otro lo haría con diez.

SINTESIS CUATITATIVA O SITESIS ANALITICA
Significa cuantificar, ecuaciones con repuesta numérica, buena y adecuada queda al juicio del diseñador.
A veces resulta haber menos ecuaciones que variables potenciales( en este caso se pone valores razonables)
También intervienen el juicio cualitativo en síntesis.

Excepto en casos simples utiliza la herramienta(CAE)
Programas por computadora Síntesis analítica en tres porciones Y diseño mediante análisis
sucesivo( da una solución rápida)
SINTESIS DIMENSIONAL
Es la determinación de las proporciones (longitudes) de los eslabones necesarios para lograr movimientos deseados.
Tiene una forma de síntesis cualitativa si se define como un algoritmo del problema particular, o si existen mas variables que ecuaciones
En síntesis dimensional de levas se aplica la cuantitativa
Mediante síntesis de tipo ya se a determinado un eslabonamiento o una leva en la solución mas apropiada al problema.

GENERACION DE FUNCION , DE TRAYECTORIA Y MOVIMIENTO

GENERACION DE FUNCION
RELACION CON UN MOVIMIENTO DE ENTRADA CON UN MOVIMIENTO DE SALIDA EN UN MECANISMO
EJM: SISTEMA DE LEVA Y SEGUIDOR , CONJUNTO PISTON-CIGÜEÑAL,VOLANTE.

SISTEMA DE LEVAS
Permite obtener un movimiento lineal alternativo, o uno oscilante, a partir de uno giratorio; pero no nos permite obtener el giratorio a partir de uno lineal alternativo (o de uno oscilante).
Es un mecanismo no reversible.

TRANSFORMACIÓN DEL MOVIMIENTO GIRATORIO EN LINEAL CONTINUO
SISTEMA CREMALLERA-PIÑÓN: Permite convertir un movimiento giratorio en uno lineal continuo, o viceversa.
APLICACIONES: movimiento de puertas automáticas de garaje; desplazamiento del cabezal de los taladros sensitivos.

SISTEMA TORNILLO-TUERCA: Permite convertir un movimiento giratorio en uno lineal continuo.
APLICACIONES: Unión desmontable de objetos. El tirafondo (sujetar elementos) El tornillo-tuerca (cama de hospital, compás, gafas...), etc.

GENERACIÓN DE TRAYECTORIA: control de un punto en el plano , de tal suerte que siga una trayectoria prescrita.
Aplicaciones: Máquinas fresadoras de CNC.

DISEÑO CONCEPTUAL DEL MECANISMO DE CUATRO BARRAS, EN SU POSICIÓN FINAL.

GENERACIÓN DE TRAYECTORIAS PARA UN ROBOT MÓVIL EMPLEANDO REDES NEURONALES:
Aplicando programación Coordenadas iníciales y finales. Número de trayectorias a generar. Ángulo de corrección inicial
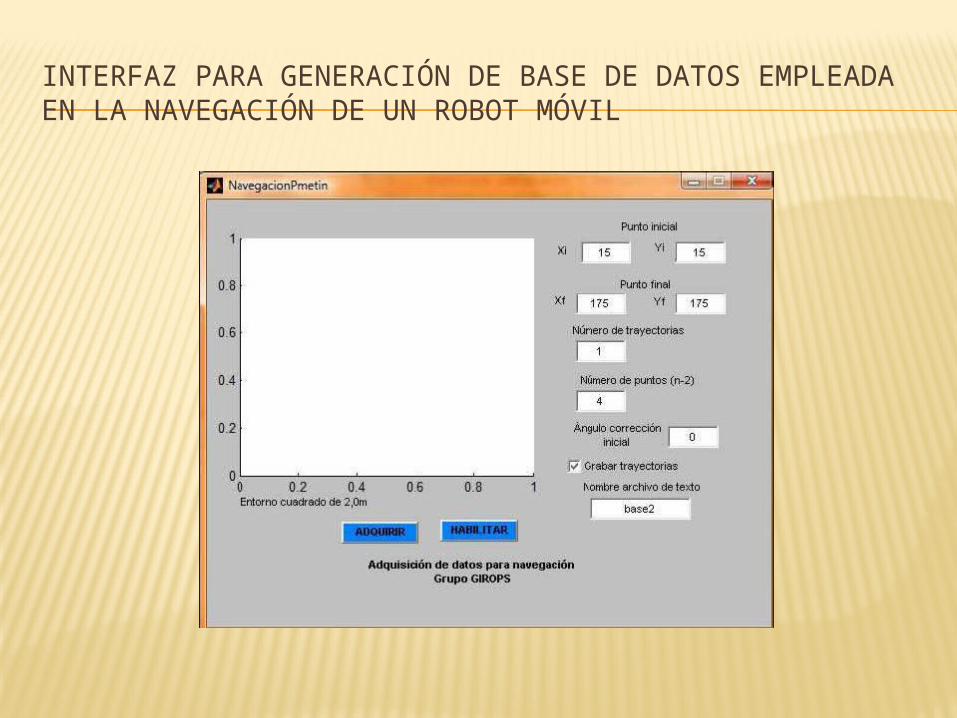
INTERFAZ PARA GENERACIÓN DE BASE DE DATOS EMPLEADAEN LA NAVEGACIÓN DE UN ROBOT MÓVIL

TRAYECTORIA GENERADA
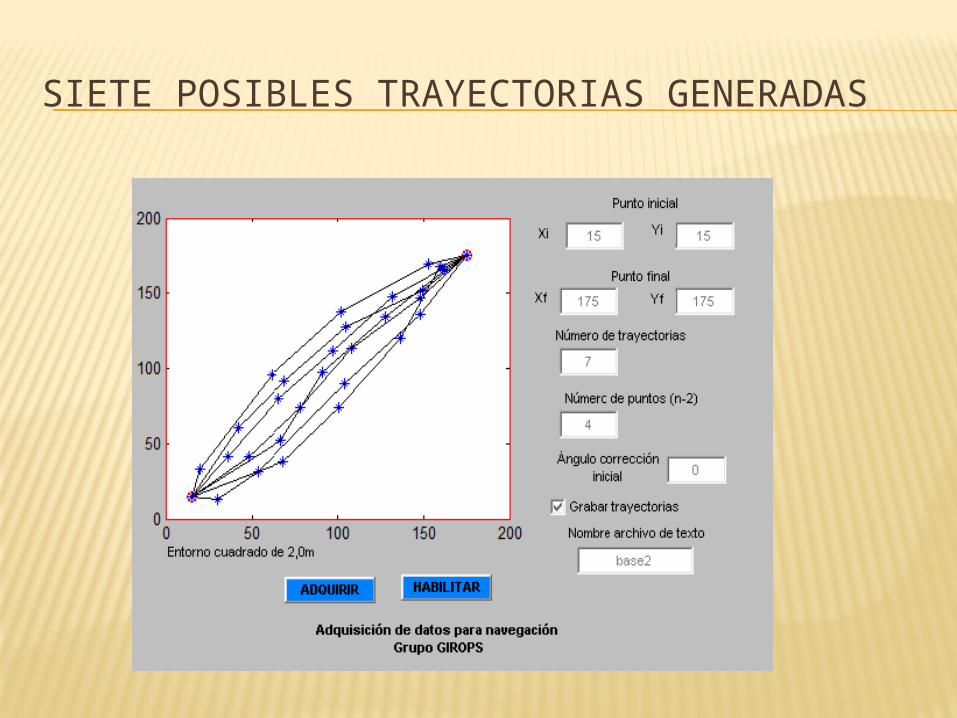
SIETE POSIBLES TRAYECTORIAS GENERADAS

PRIMERA TRAYECTORIA GENERADA

SEGUNDA TRAYECTORIA GENERADA

TERCERA TRAYECTORIA GENERADA

PRUEBA A INTERFAZ PARA GENERACIÓN BASE DE DATOS

PRUEBA A INTERFAZ PARA GENERACIÓN DE TRAYECTORIA

GENERACION DEL MOVIMIENTO Control de una línea en el plano de modo
que asuma un conjunto prescrito de posiciones secuenciales.
Eje :control del cucharon de una retroexcavadora

MOVIMIENTO DEL BRAZO-CUCHARA

LA ROBOTICA
Configuración cartesiana:Posee tres movimientos lineales, es decir, tiene tres grados de libertad, los cuales corresponden a los movimientos localizados en los ejes X, Y y Z.
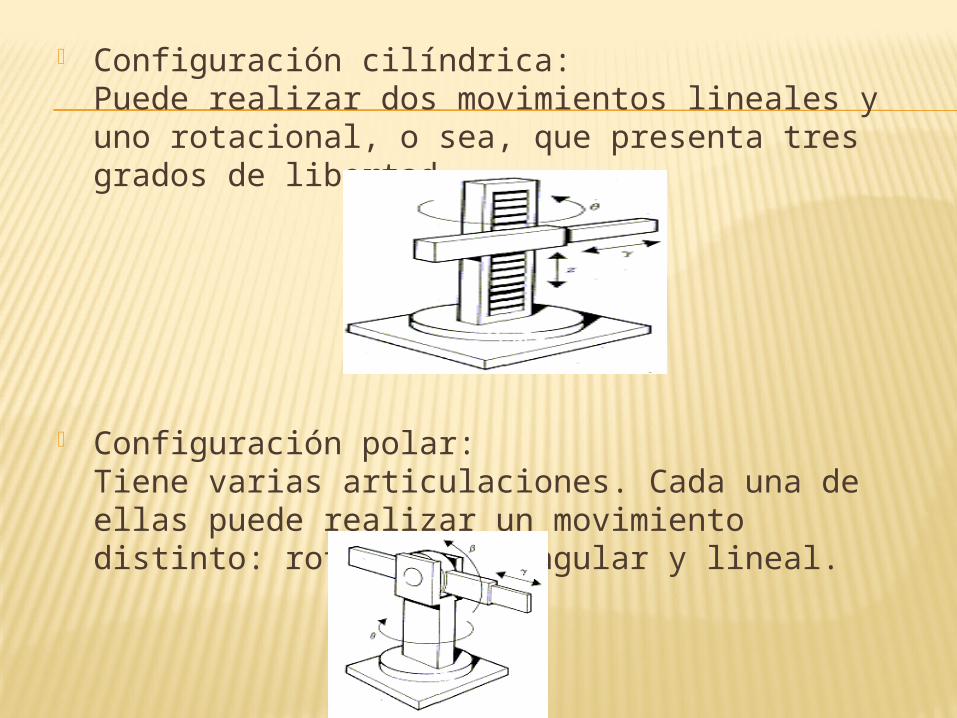
Configuración cilíndrica:Puede realizar dos movimientos lineales y uno rotacional, o sea, que presenta tres grados de libertad.
Configuración polar:Tiene varias articulaciones. Cada una de ellas puede realizar un movimiento distinto: rotacional, angular y lineal.

Configuración angular (o de brazo articulado): Presenta una articulación con movimiento rotacional y dos angulares
El robot de configuración cilíndrica presenta un volumen de trabajo parecido a un cilindro (normalmente este robot no tiene una rotación de 360°)
MECANISMOS PLANOS CONTRA MECANISMOS ESPACIALES
Los mecanismos planos son dispositivos bidimensionales
Los mecanismos espaciales son dispositivos tridimensionales
Ejemplos de aplicación : sillas plegables ; el cofre del automóvil.

BISAGRA DE CAPO DEL AUTOMOVIL

CONDICIONES LÍMITE




SÍNTESIS DIMENSIONAL
Determinación de las dimensiones de los eslabones necesarios para lograr movimientos deseados
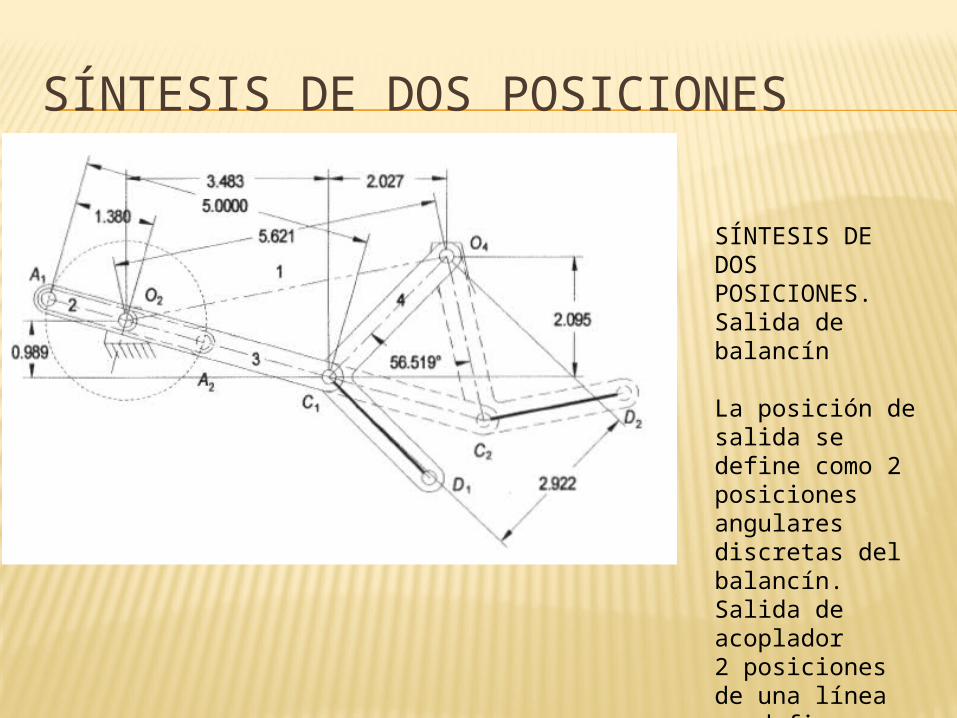
SÍNTESIS DE DOS POSICIONES
SÍNTESIS DE DOS POSICIONES.Salida de balancín
La posición de salida se define como 2 posiciones angulares discretas del balancín.Salida de acoplador2 posiciones de una línea se definen como salida.
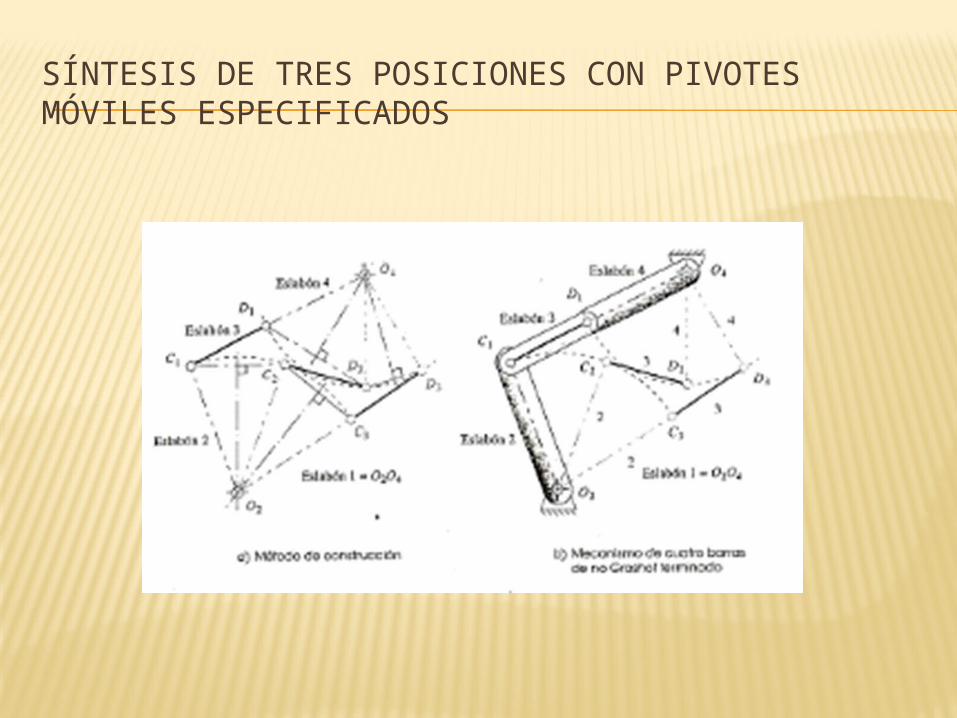
SÍNTESIS DE TRES POSICIONES CON PIVOTES MÓVILES ESPECIFICADOS

SÍNTESIS DE POSICIÓN PARA MAS DE TRES POSICIONES
Es un método de síntesis cuantitativo Requiere una computadora para
ejecutarlo

OBJETIVOS:•Muchas aplicaciones de diseño de maquinas requieren una diferencia en la velocidad promedio entre su carrera de avance y retorno.
•El mecanismo realiza algún trabajo externo en la carrera de avance y el retorno debe ser tan rápido como sea posible
•Muchas configuraciones proporcionaran este funcionamiento
3.5 MECANISMO DE RETORNO RÁPIDO

MECANISMO DE RETORNO RÁPIDO DE CUATRO BARRAS
Mecanismo manivela - balancín Tiene dos posiciones del balancín con tiempos iguales avance y retorno Se llama mecanismo de no retorno rápido es un caso especial de
retorno rápido La razón para su estado de no retorno es la posición de O2 en la cuerda
B1B2 Esto hace que la manivela describa ángulos iguales a 180º Si la manivela gira a vel. Angular Cte. Como lo hace un motor entonces
cada giro de 180º hacia adelante y hacia atrás tomara el mismo tiempo

Si el centro de la manivela O2 se encuentra fuera de la cuerda B1B2 la manivela Describirá ángulos desiguales entre posiciones
Ángulos desiguales darán tiempos desiguales cuando la manivela gire a vel constante Estos ángulos son 𝛼 𝑦 𝛽 Su relación / se llama relación de tiempo (TR) definiendo el grado de retorno del 𝛼 𝛽
mecanismo Es mas difícil diseñar un mecanismo para una relación de tiempo seleccionada Proporciona un método grafico para sintetizar un mecanismo de cuatro barras 𝑇𝑅= / + =360𝛼 𝛽 𝛼 𝛽 También se debe definir un ángulo de construcción 𝛿=180− =180−𝛼 𝛽

MECANISMO DE CUATRO BARRAS