sistemas mecatronicaos matlab
TRANSCRIPT

SISTEMAS MECATRONICOSMODELADO, SIMULACION Y CONTROL
ARTURO ROJAS MORENO, Ph.D.
θ
r
u1 u2
u 2
x
y
θ 2
1 θ1u
z
F Matematica para Sistemas Mecatronicos
F Modelado Lineal y No Lineal
F Simulacion de Sistemas Mecatronicos
F Control PID SISO y MIMO
F Control Optimo de Sistemas Mecatronicos
F Control Adaptativo con Modelo Referencial
F Control por Modos Deslizantes
F Control Backstepping
F Programas Fuente en MATLABr

II
SISTEMAS MECATRONICOS
MODELADO, SIMULACION Y CONTROL
Copyright c© 2011 Arturo Rojas Moreno. Todos los derechos reservados.
ISBN
Queda rigurosamente prohibida la reproduccion total o parcial de esta obra por cualquier
medio o procedimiento, sin la autorizacion escrita del propietario del “Copyright”.

A la Memoria de mis Padres


Indice general
III
Prefacio IX
Abreviaturas XI
1. Introduccion 1
1.1. Diseno de Sistemas de Control Mecatronicos . . . . . . . . . . . . . . . 1
1.1.1. Los Sistemas Mecatronicos Prototipo . . . . . . . . . . . . . . . 3
1.1.2. Los Algoritmos de Control . . . . . . . . . . . . . . . . . . . . . 7
1.1.3. El Procedimiento de Diseno . . . . . . . . . . . . . . . . . . . . 8
2. Sistemas Continuos 9
2.1. La Transformada Unilateral de Laplace . . . . . . . . . . . . . . . . . 9
2.1.1. Definicion y Ejemplos . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.2. La Transformada Inversa de Laplace . . . . . . . . . . . . . . . 12
2.1.3. La Funcion de Transferencia . . . . . . . . . . . . . . . . . . . . 13
2.1.4. Fracciones Parciales . . . . . . . . . . . . . . . . . . . . . . . . 14
2.1.5. Algebra de Bloques . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2. Matrices y Determinantes . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.2.1. Operaciones con Matrices . . . . . . . . . . . . . . . . . . . . . 21
2.2.2. Tipos de Matrices . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2.3. Determinantes y Matriz Inversa . . . . . . . . . . . . . . . . . . 24
2.2.4. Rango, Eigenvectores y Pseudoinversas . . . . . . . . . . . . . . 29
2.2.5. Diagonalizacion de Matrices y Formas Canonicas . . . . . . . . 34
2.3. Variables de Estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.3.1. Ejemplo de Introduccion . . . . . . . . . . . . . . . . . . . . . . 35
2.3.2. Definicion de Variables de Estado . . . . . . . . . . . . . . . . . 37
2.3.3. Matriz de Transferencia y Estabilidad . . . . . . . . . . . . . . 38
2.3.4. Controlabilidad y Observabilidad . . . . . . . . . . . . . . . . . 41
2.3.5. Solucion de la Ecuacion de Estado de SLITs Continuos . . . . 44
2.3.6. Formas Canonicas SISO en el Espacio de Estado . . . . . . . . 51
2.4. Discretizacion Directa . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.5. Sistemas con Tiempo Muerto . . . . . . . . . . . . . . . . . . . . . . . 58
2.6. Linealizacion de Sistemas Continuos . . . . . . . . . . . . . . . . . . . 60
2.6.1. Caso SISO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
2.6.2. Caso MIMO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61

VI INDICE GENERAL
2.7. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3. Transmision del Movimiento 75
3.1. Transmision Rotatoria a Rotatoria . . . . . . . . . . . . . . . . . . . . 75
3.1.1. Engranajes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.1.2. Poleas con Faja de Transmision . . . . . . . . . . . . . . . . . . 76
3.2. Transmision Rotatoria a Traslacion . . . . . . . . . . . . . . . . . . . . 77
3.2.1. Tornillo de Avance . . . . . . . . . . . . . . . . . . . . . . . . 77
3.2.2. Cremallera y Pinon . . . . . . . . . . . . . . . . . . . . . . . . 78
3.2.3. Faja de Transporte y Poleas . . . . . . . . . . . . . . . . . . . 78
3.3. Transmision de Movimiento Cıclico . . . . . . . . . . . . . . . . . . . . 79
3.3.1. Articulaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.3.2. Levas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
3.4. Momentos de Inercia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
3.5. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4. Modelado de Sistemas Lineales 85
4.1. Leyes Fundamentales . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.1.1. Elementos Ideales . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.1.2. Ley de D′
Alambert . . . . . . . . . . . . . . . . . . . . . . . . . 88
4.1.3. Ley de Accion y de Reaccion . . . . . . . . . . . . . . . . . . . 89
4.1.4. Ley de los Desplazamientos . . . . . . . . . . . . . . . . . . . . 89
4.1.5. Leyes de Kirchhoff . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.2. Momento de Inercia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4.3. Ejemplos de Sistemas Traslacionales . . . . . . . . . . . . . . . . . . . 94
4.4. Ejemplos de Sistemas Rotacionales . . . . . . . . . . . . . . . . . . . . 101
4.5. Ejemplos de Sistemas Electromecanicos . . . . . . . . . . . . . . . . . 105
4.6. Ejemplo de Sistemas Hidraulicos . . . . . . . . . . . . . . . . . . . . . 111
4.7. Ejemplos de Sistemas Termicos . . . . . . . . . . . . . . . . . . . . . . 114
4.8. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
5. Modelado de Sistemas No Lineales 125
5.1. Manipulador Robotico de 1GDL (MR1) . . . . . . . . . . . . . . . . . 125
5.2. Manipulador Robotico con Articulacion Elastica (MRAE) . . . . . . . 132
5.3. Sistema Tanque Cerrado . . . . . . . . . . . . . . . . . . . . . . . . . . 136
5.3.1. Descripcion del Sistema . . . . . . . . . . . . . . . . . . . . . . 136
5.3.2. Modelo Dinamico No Lineal del Sistema . . . . . . . . . . . . . 138
5.3.3. Modelo Dinamico de Lagrange del Sistema . . . . . . . . . . . 140
5.3.4. Modelo Dinamico Lineal del Sistema . . . . . . . . . . . . . . . 140
5.4. Metodo de Las Ecuaciones de Lagrange . . . . . . . . . . . . . . . . . 141
5.5. Pendulo Invertido Traslacional (PIT) . . . . . . . . . . . . . . . . . . . 143
5.6. Grua Puente (GPT) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
5.7. Manipulador Robotico Traslacional (MRT) . . . . . . . . . . . . . . . 150
5.8. Manipulador Robotico Esferico de 2GDL (MRE) . . . . . . . . . . . . 158
5.9. Manipulador Robotico Esferico de 3GDL (MRE3) . . . . . . . . . . . 165
5.10. Pendulo Invertido Rotacional: PIR . . . . . . . . . . . . . . . . . . . . 171
5.11. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173

INDICE GENERAL VII
A. Fundamentos de MATLAB y Simulink 179A.1. Fundamentos de MATLAB . . . . . . . . . . . . . . . . . . . . . . . . 179
A.1.1. El Entorno de Trabajo de MATLAB . . . . . . . . . . . . . . . 179A.1.2. Comandos y Funciones Generales . . . . . . . . . . . . . . . . . 180A.1.3. Creacion de Archivos Tipo m . . . . . . . . . . . . . . . . . . . 182A.1.4. Matematicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183A.1.5. Graficos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190A.1.6. Matematica Simbolica . . . . . . . . . . . . . . . . . . . . . . . 191A.1.7. Simulacion de un Sistema de Control . . . . . . . . . . . . . . . 193
A.2. Fundamentos de Simulink . . . . . . . . . . . . . . . . . . . . . . . . . 197A.2.1. Fundamentos del Software Simulink . . . . . . . . . . . . . . . 197
.Bibliografıa 203
.Indice alfabetico 207

Prefacio
Este libro esta dirigida a todos los profesionales, cientıficos, especialistas y estu-diantes interesados en familiarizarse con el modelado, simulacion y control de sistemasmecatronicos. Tanto modelos lineales como no lineales se emplean en esta publicacionpara representar la dinamica de los sistemas tratados.
Este libro usa intensivamente el software MATLABr para el calculo, diseno ysimulacion de sistemas mecatronicos. Tambien se emplea en menor medida el paquete
Simulinkr, el cual trabaja dentro del entorno MATLAB. Simulink usa diagramas debloques en su programacion. El Apendice A: Fundamentos de MATLAB y Simulink,es lectura primordial para los lectores poco familiarizados con estos programas.
Todos los programas empleados en este libro se pueden ejecutar sin problemasen versiones recientes de MATLAB. Tales programas fuente se pueden descargar delenlace Descargas de: www.ctlima.com.
Para asimilar sin dificultad el contenido de este libro, el lector requiere haberllevado los cursos de matematica, fısica y teorıa de control automatico dictados enuna Universidad o Instituto. El contenido de este libro esta organizado como sigue:
Capıtulo 1: Introduccion. Este capıtulo tiene el proposito de introducir allector en el campo de los sistemas de control mecatronicos. Se describen breve-mente algunos sistemas prototipo a ser controlados y se presenta el procedimiento dediseno para el control. Antes de abordar los siguientes capıtulos se recomienda leerel Apendice A.
Capıtulo 2: Matematica para Sistemas Mecatronicos. Este capıtulo tratalos topicos de matematica aplicada necesarios en los capıtulos siguientes. Se poneenfasis en la solucion de problemas matematicos empleando software.
Capıtulo 3: Transmision del Movimiento. Empleando las leyes de la fısica, eneste capıtulo se desarrollan los modelos de mecanismos de transmision de movimien-to rotatorio a rotatorio (engranajes, poleas con fajas de transmision), de movimientorotatorio a traslacion (tornillo sin fin, cremallera–pinon, faja–polea) y de movimientocıclico (articulaciones, levas).
Capıtulo 4: Modelado de Sistemas Lineales. En este capıtulo se desarrollany simulan los modelos matematicos de varios sistemas mecatronicos lineales.
Capıtulo 5: Modelado de Sistemas No Lineales. Los modelos matematicosno lineales de varios sistemas son desarrollados y simulados en este capıtulo.

X Prefacio
Capıtulo 6: Control PID. El control PID (Proporcional–Integral–Derivativo)de los sistemas mecatronicos SISO (Single–Input–Single–Output) y SIMO (Single–Input–Multiple–Output) es materia de este capıtulo.
Capıtulo 7: Control PID MIMO. Varios metodos de control PID MIMO(Multiple–Input–Multiple–Output) se tratan en este capıtulo.
Capıtulo 8: Control Optimo. El sistema de control optimo considerado combi-na un sistema no lineal pero linealizable, un controlador de realimentacion de estadosprorporcional–integral y un observador no lineal para estimar los estados del sistema.
Capıtulo 9: Control Adaptativo con Modelo Referencial. Este sistema decontrol no lineal se compone de cuatro partes: el modelo de referencia, el controladoradaptativo, el sistema no lineal y el mecanismo de adaptacion.
Capıtulo 10: Control por Modos Deslizantes. La metodologıa aplicada eneste tipo de control incluye una ley de control no lineal que esta conmutando sobreuna superficie que pertenece al espacio de estado del sistema. Si alguna trayectoriade estado se trata de desviar de tal superficie, entonces se aplican acciones de controlpara hacer retornar dicha trayectoria a su estado anterior.
Capıtulo 11: Control Backstepping. Basado en el metodo directo de Lya-punov, la metodologıa backstepping comprende varios pasos. En cada paso se intro-duce un control virtual cuyo diseno se basa en la seleccion adecuada de una funcionde Lyapunov, que aplicada al sistema a controlar, permite la estabilizacion del mismo.
Apendice A: Fundamentos de MATLAB y Simulink. Este apendice presen-ta una gran variedad de problemas matematicos resueltos con MATLAB/Simulink,ası como tambien ejemplos de graficos elaborados con dichas herramientas.
Apendice B: El Metodo Directo de Lyapunov. El Metodo Directo de Lya-punov permite determinar la estabilidad de los sistemas no lineales sin necesidad deencontrar una solucion de la descripcion dinamica de los mismos. Este metodo seemplea en la deduccion de los siguientes algoritmos de control: adaptativo (Capıtulo??), con modos deslizantes (Capıtulo ??) y backstepping (Capıtulo ??).
No deseo culminar este prefacio sin antes agradecer a las personas e institucionesque en forma alguna tuvieron que ver con la publicacion de este trabajo. Mi agra-decimiento sincero a TECSUP, mi centro laboral, por haberme facilitado el uso dealgunos modulos educativos para ilustrar el modelado y control de sistemas linealesy no lineales.
Arturo Rojas Moreno, [email protected]
www.ctlima.com

Abreviaturas
ac adaptive controlbsc backstepping controlDAQ Data Acquisition Card (Tarjeta de Adquisicion de Datos)DC Direct Current (corriente continua)GDL Grado de LibertadGPT Grua Puentelqe linear quadratic estimator (comando MATLAB)lqr linear quadratic regulator (comando MATLAB)Mi Servomotor DC, i = 1, 2, 3MATLAB MATrix LABoratoryMIMO Multiple–Input–Multiple–Output
(Multiples Entradas–Multiples–Salidas)MR1 Manipulador Robotico de 1GDLMRAE Manipulador Robotico con Articulacion ElasticaMRE Manipulador Robotico EsfericoMRE3 Manipulador Robotico Esferico de 3GDLMRT Manipulador Robotico TraslacionalMRTE Manipulador Robotico Traslacional–EsfericoMSIP Motor Sıncrono de Iman Permanenteoc optimal controlPCI Peripheral Component Interconnect
(Interconexion de Componentes Perifericos)PFIO Programmable Function I/O (Entradas/Salidas programables)PID Proporcional–Integral–DerivativoPIR Pendulo Invertido RotacionalPIT Pendulo Invertido TraslacionalPWM Pulse Width Modulation (Modulacion por Ancho de Pulsos)SCAMR Sistema de Control Adaptativo con Modelo Referencialsc sliding controlSDA Sistema de Despegue y AterrizajeSISO Single Input Single Output (Una Entrada Una Salida)SLB Simulink Library BrowserTANQUE Sistema Tanque con AguaVC Ventana de Comandos de MATLAB


Capıtulo 1
Introduccion
Segun la referencia [1], la mecatronica surge de la integracion adecuada de distintasramas de la ingenierıa, tales como la mecanica de precision, la electronica, la informaticay la ingenierıa de control. Los propositos principales de la mecatronica son el analisis ydiseno de productos, y el desarrollo de procesos de manufactura automatizados.
Un sistema mecatronico es aquel sistema que posee la capacidad de adquirir, proce-sar y generar senales. Los sistemas mecatronicos poseen sensores y transductores para laadquisicion de senales, los microprocesadores para generar las senales de monitoreo y con-trol, y los actuadores para producir los movimientos o acciones sobre el sistema bajo con-trol. Los microprocesadores pueden ser DSPs (Digital Signal Processors), F P G A s (FieldProgrammable Gate Arrays), ASICs (Application-Specific Integrated Circuit), CPLDs(Complex Programmable Logic Devices), SoC (System on Chip), Embedded Systems(sistemas encapsulados), la CPU de una computadora, entre otros, dada la aplicacion.
Los manipuladores roboticos, las maquinas de control numerico, los denominadosvehıculos autonomos, los graficadores xyz, los pendulos de ındole diversa, etc. pueden serconsiderados como sistemas mecatronicos. En este capıtulo se exploran los fundamentosde los sistemas mecatronicos y se se describen algunos sistemas mecatronicos prototipos.
1.1. Diseno de Sistemas de Control Mecatronicos
La ingenierıa mecatronica puede ser considerado como la confluencia de varioscampos de la ingenierıa tales como la mecanica, la electronica y la informatica. Veresta confluencia en la Fig. 1.1.
El diagrama de bloques de un sistema de control mecatronico se muestra en la Fig.1.2, donde el sistema mecatronico es la maquina, proceso o mecanismo a controlar.Los sensores y actuadores (llamados tambien convertidores o transmisores) confor-man el bloque de medicion, mientras que el bloque elementos de control final contienelos elementos motrices del sistema como son actuadores (electricos, neumaticos), mo-tores, valvulas, entre otros. El bloque controlador es el cerebro del sistema debido aque contiene el algoritmo que genera senal de control u para accionar el elemento decontrol final.
El bloque fuente de potencia proporciona toda la energıa que requiere el sistemade control. Esta energıa, dado el caso, puede ser electrica, neumatica, hidraulica, o

2 Introduccion
MECATRÓNICAELECTRÓNICAMECÁNICA
Neumática
Hidráulica
Electrónica de PotenciaSensores y
Actuadores
HMIControl
RedesIndustriales
INFORMÁTICA
Protocolos CAE
CAD
CAQ
Fig. 1.1: Mecatronica y sus campos de influencia. CAD: Computer Aided Design,CAE: Computer Aided Engineering, CAQ: Computer Aided Quality, HMI: Human–Machine Interface.
una combinacion de las mismas. Por otro lado, el bloque HMI (Interfaz Hombre–Maquina), es la conexion del sistema de control con el o los usuarios. Este bloquepuede representar un sistema de supervision, el cual, ademas de supervisar que secumpla el objetivo de control, tambien puede estar en comunicacion con otros sistemasmediante una red industrial.
El objetivo de control del sistema mecatronico mostrado en la Fig. 1.2, es disenaruna senal de control u que sea capaz de hacer que la senal de salida y siga auna senal de referencia arbitraria cumpliendo ciertas especificaciones de diseno pre–establecidas.
ControladorControl Final Mecatrónico
Sistema
Sensores yTransductores
Hombre − MáquinaInterfaz
HMI
Fuente dePotencia
Elementos de u y
Fig. 1.2: Sistema de control mecatronico.
Un sistema mecatronico a controlar requiere de un modelo matematico que descri-ba con suficiente exactitud su comportamiento dinamico. Tener en cuenta que todoslos sistemas a controlar son no lineales por naturaleza. Sin embargo, en muchos casos,en los cuales el punto de operacion del sistema no varıa mucho, los modelos dinami-cos lineales son suficientes. Estos modelos lineales se obtienen linealizando el modelono lineal correspondiente. Tambien es posible obtener un modelo lineal del sistemamecatronico desde un inicio, tal como se vera en varios ejemplos desarrollados en los

1.1 Diseno de Sistemas de Control Mecatronicos 3
Capıtulos 3 y 4.
En contraposicion con los sistemas de control lineales, un sistema de control nolineal puede operar en grandes rangos de operacion, a pesar de la presencia de incer-tidumbres en el modelo dinamico del sistema y considerables perturbaciones actuandosobre el sistema controlado. Los sistemas de control no lineales tambien son capacesde compensar no linealidades inherentes al sistema controlado tales como friccionde Coulomb, saturacion, zona muerta, histerisis, juegos en los engranajes (backlashen ingles), entre otras. En estos casos se requiere un modelo dinamico no lineal delsistema.
1.1.1. Los Sistemas Mecatronicos Prototipo
Varios de los sistemas de control mecatronicos disenados para esta publicacionconsisten basicamente de un sistema mecatronico prototipo y de un algoritmo decontrol. En principio, el sistema prototipo requiere ser modelado mediante un con-junto de ecuaciones diferenciales no lineales que sean capaces de representar las prin-cipales caracterısticas dinamicas de su comportamiento. En el Capıtulo 5 se deducenlos modelos dinamicos de tales sistemas. A continuacion se describe brevemente cadauno de estos sistemas.
MR1: Manipulador Robotico de 1GDL
El esquema del manipulador robotico de 1GDL (1 Grado De Libertad) mostra-do en la Fig. 1.3 se compone de un servomotor DC (Direct Current) y de un brazoacoplado al eje del servomotor, a cuyo extremo se puede acoplar un efector o her-ramienta. El sistema MR1 es del tipo SISO (Single–Input–Single–Output) ya que soloposee una entrada: el voltaje de control u aplicado en la armadura del servomotor, yuna salida: la posicion angular θ del brazo.
u
Servomotor
θ
Brazo
Efector final
Fig. 1.3: MR1: Manipulador Robotico de 1GDL (1 Grado de Libertad).
4 Introduccion
MRAE: Manipulador Robotico con Articulacion Elastica
El sistema MRAE es el sistema MR1 pero con articulacion elastica en lugar dearticulacion fija.
PIT: Pendulo Invertido Traslacional
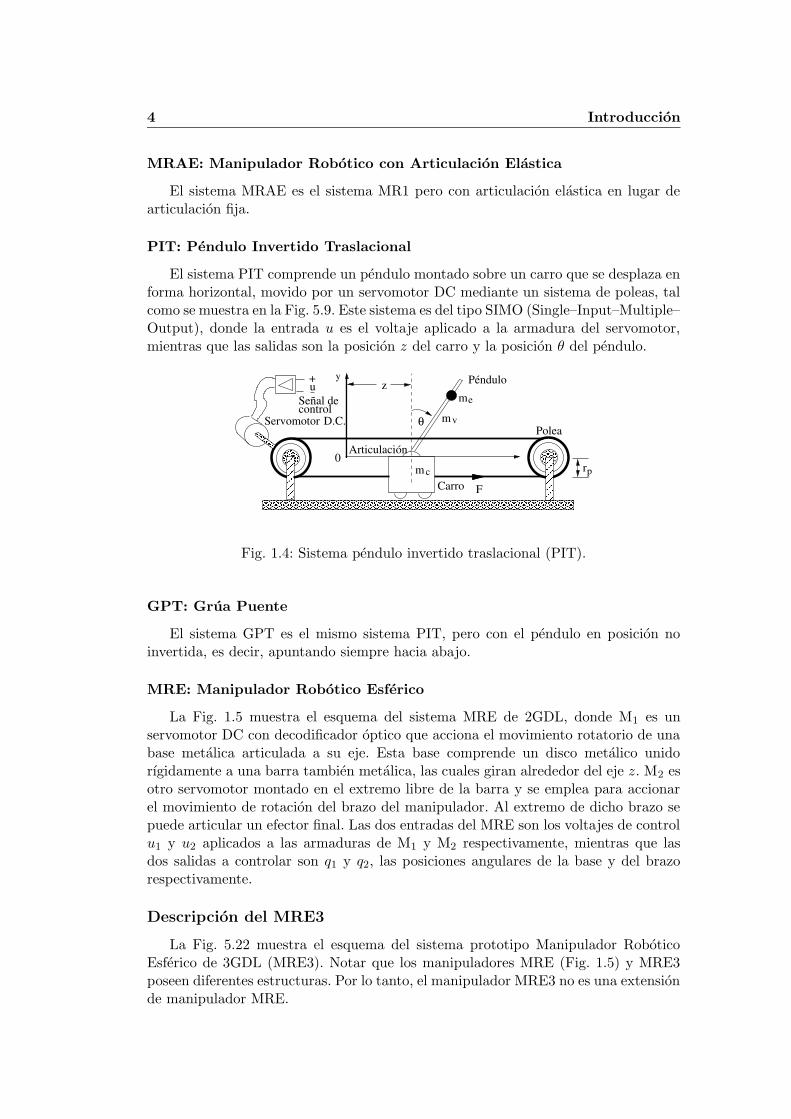
El sistema PIT comprende un pendulo montado sobre un carro que se desplaza enforma horizontal, movido por un servomotor DC mediante un sistema de poleas, talcomo se muestra en la Fig. 5.9. Este sistema es del tipo SIMO (Single–Input–Multiple–Output), donde la entrada u es el voltaje aplicado a la armadura del servomotor,mientras que las salidas son la posicion z del carro y la posicion θ del pendulo.
FCarro
y
rp
Polea
Articulación
θ
zm
m
m
e
v
c
u+
Señal de control
Servomotor D.C.
Péndulo
0
Fig. 1.4: Sistema pendulo invertido traslacional (PIT).
GPT: Grua Puente
El sistema GPT es el mismo sistema PIT, pero con el pendulo en posicion noinvertida, es decir, apuntando siempre hacia abajo.
MRE: Manipulador Robotico Esferico
La Fig. 1.5 muestra el esquema del sistema MRE de 2GDL, donde M1 es unservomotor DC con decodificador optico que acciona el movimiento rotatorio de unabase metalica articulada a su eje. Esta base comprende un disco metalico unidorıgidamente a una barra tambien metalica, las cuales giran alrededor del eje z. M2 esotro servomotor montado en el extremo libre de la barra y se emplea para accionarel movimiento de rotacion del brazo del manipulador. Al extremo de dicho brazo sepuede articular un efector final. Las dos entradas del MRE son los voltajes de controlu1 y u2 aplicados a las armaduras de M1 y M2 respectivamente, mientras que lasdos salidas a controlar son q1 y q2, las posiciones angulares de la base y del brazorespectivamente.
Descripcion del MRE3
La Fig. 5.22 muestra el esquema del sistema prototipo Manipulador RoboticoEsferico de 3GDL (MRE3). Notar que los manipuladores MRE (Fig. 1.5) y MRE3poseen diferentes estructuras. Por lo tanto, el manipulador MRE3 no es una extensionde manipulador MRE.

1.1 Diseno de Sistemas de Control Mecatronicos 5
q2
z
y
xq1
Servomotor M1
Servomotor M2
u1
u2
Base
Efector final
Brazo
Fig. 1.5: MRE: Manipulador Robotico Esferico
El manipulador MRE3 posee un servomotor M1, cuyo eje esta conectado al ejede la base del MRE3 mediante una faja de transmision de movimiento. M2 es otroservomotor DC montado en el centro de rotacion CR2 del brazo, ubicado en el extremolibre de la base. El antebrazo del MRE3 posee un servomotor M3 montado en el centrode rotacion CR3 del antebrazo.
El manipulador MRE3 representa un sistema multivariable cuadrado por poseertres entradas: los voltajes de control u1, u2 y u3 aplicados a los terminales de armadurade M1, M2 y M3, respectivamente, y tres salidas: q1, q2 y q3.
Antebrazo
EfectorCR2
CR3
Correa detransmisión
ServomotorM1
M 3
M2 final
Base
Brazo
CR 1
Fig. 1.6: El manipulador robotico esferico de 3GDL (MRE3).

6 Introduccion
MRT: Manipulador Robotico Traslacional
La Fig. 1.7 muestra el sistema MRT de 2 GDL. M1 es un servomotor DC que poseeun mecanismo de reduccion y un decodificador optico, y esta articulado a una poleapor donde pasa un cable para transmitir la fuerza F para accionar el movimientode traslacion de un carro montado sobre un par de rieles a lo largo de un eje x.M2 es tambien un servomotor con decodificador optimo y mecanismo de reduccion,empleado para accionar el movimiento rotatorio del brazo del MRT alrededor de unaarticulacion ubicada en el centro de masa del carro. Las dos entradas del MRT sonlos voltajes de control u1 y u2 aplicados los terminales de las armaduras de M1 y M2
respectivamente, mientras que sus dos salidas a controlar son r y θ.
Ff
r
x
y
u1Fu2
Servomotor M2
Servomotor M1θ
Brazo
Polea
Carro
Efector final
Fig. 1.7: El manipulador robotico traslacional (MRT).
PIR: Pendulo Invertido Rotacional
La Fig. 1.8 muestra el esquema de pendulo invertido rotacional (PIR). La basedel sistema aloja un servomotor DC con encoder incorporado para medir la posicionangular θ de un soporte en L que esta acoplado al eje del servomotor. El penduloesta acoplado a dicho soporte mediante un eje de rotacion, el cual tambien es el eje derotacion de otro encoder que mide la posicion angular α del pendulo. En el extremolibre del pendulo existe un pequeno contrapeso.
SDA: Sistema de Despegue y Aterrizaje
La Fig. 4.21 muestra el esquema del sistema de despegue y aterrizaje SDA. Estesistema comprende un contrapeso de masa m2, un rotor de masa m1 y una varilla demasa mh que los une. El objetivo de control del SDA es disenar una ley de control queactue sobre la armadura del motor DC del rotor, de modo que el angulo de elevacionθ siga a una senal de referencia, cumpliendo las especificaciones de diseno del caso.
STC: Sistema Tanque Cerrado
La Fig. 5.6 muestra el esquema del sistema tanque cerrado, donde los flujos deagua frıa qC y de agua caliente qC se mezclan en el interior del tanque con el proposito

1.1 Diseno de Sistemas de Control Mecatronicos 7
Péndulo
Encoder
Base
αθ
Motor DCcon encoder
Fig. 1.8: Esquema del sistema Pendulo Invertido Rotacional (PIR).
1
m1
Ft
cm
Puntopivote
L
m
Rotor
L h
soporteBarra
L
θ > 0
hg
g
2L
Contrapesog2
m
Fig. 1.9: Esquema del Sistema de Despegue y Aterrizaje (SDA).
de producir el flujo de salida qC a una temperatura θ. Este sistema es multivariablecuadrado debido a que posee dos entradas: los flujos qC yqH , y dos salidas: el nivel hdel agua dentro del tanque y la temperatura θ que se asume uniforme en el interiordel tanque.
1.1.2. Los Algoritmos de Control
Los siguientes algoritmos de control emplean los modelos dinamicos no linealesde los sistemas a controlar en su formulacion:
1. Controlador adaptativo con modelo referencial (Capıtulo ??).
2. Controlador por modos deslizantes (Capıtulo ??).
3. Controlador backstepping (Capıtulo ??).

8 Introduccion
TT
LT
PT
FT
FT
FT= Transmisor de Flujo
PT= Transmisor de Presión
LT= Transmisor de Nivel
TT = Transmisor de Temperatura
Reboce
Drenaje
Agua Caliente
Agua Fría
Fig. 1.10: Esquema de estudio del sistema tanque con agua.
El algoritmos de control optimo (Capıtulo ??) usa el modelo dinamico linealizado enel espacio de estado del sistema no lineal a controlar. El algoritmo de control PIDno emplea el modelo dinamico del sistema y puede ser aplicados a sistemas SISO ySIMO (ver Capıtulo ??). Los algoritmos de control PID MIMO se desarrollan en elCapıtulo ??.
1.1.3. El Procedimiento de Diseno
El procedimiento de diseno de un sistema de control mecatronico propuesto es elsiguiente:
1. Determinar el modelo matematico dinamico del sistema mecatronico a ser con-trolado (Capıtulos 4) y 5).
2. Deducir el modelo matematico dinamico del algoritmo de control a emplear(Capıtulos ?? al ??).
3. Establecer las especificaciones de diseno a ser cumplidas (tiempo de estabi-lizacion, porcentaje de sobreimpulso y error en estado estable).
4. Verificar el sistema de control disenado vıa simulacion empleando MATLAB(Apendice A), manipulando los parametros de sintonizacion del controladorpara que las salidas controladas cumplan las especificaciones de diseno previa-mente establecidas (el objetivo del control).
Capıtulo 2
Sistemas Continuos
Este Capıtulo presenta la matematica requerida en los Capıtulos siguientes. Los topi-cos se desarrollan principalmente en el dominio continuo. El topico discretizacion directase desarrolla en el dominio discreto. Los numerosos ejemplos presentados se resuelven enunos casos analıticamente, en otros con ayuda del software MATLAB y en la mayorıa delos casos empleando ambos metodos.
Los temas a tratar son: transformada de Laplace, algebra de bloques, matrices ydeterminantes, variables de estado, discretizacion directa, sistemas con tiempo muerto,linealizacion de sistemas continuos y estabilidad.
2.1. La Transformada Unilateral de Laplace
2.1.1. Definicion y Ejemplos
La transformada unilateral de Laplace G(s) de una funcion g(t) se define como:
G(s) = L[g(t)] =
∫ ∞
0g(t)e−stdt (2.1)
donde el numero complejo s = σ + jω es la variable Laplaciana. La region de s en lacual dicha integral converge se denomina Region de Convergencia.
Un sistema representado por la funcion g(t) se denomina causal cuando su saliday(t) depende solo de la entrada presente u(t) y de las entradas pasadas u(t−ti), dondet es la variable dependiente tiempo continuo y los ti para i = 0, . . . , n son numerosreales positivo que indican retardos de tiempo. La gran mayorıa de los sistemas realesson causales.
La Fig. 2.1(a) muestra un tanque con agua calentada mediante vapor. La curva dereaccion del sistema temperatura y(t) mostrado en la Fig. 2.1(b) se obtiene variandola abertura u(t) de la valvula de vapor. Este sistema es causal porque, por ejemplo,la salida y en el tiempo t3, depende de la entrada u en t3 (la actual) y de las entradaspasadas en t2, t1 y t0.
La transformada unilateral de Laplace es util para representar en forma alge-braica sistemas causales descritos por ecuaciones diferenciales lineales invariantes conel tiempo. La Tabla 2.1 muestra la transformada unilateral de Laplace de algunasfunciones. Varias de sus propiedades se ilustran en la Tabla 2.2.

10 Sistemas Continuos
Vapor
Agua
u
y
t
y
u
t
t0 1t 2t 3t
(a) (b)
Fig. 2.1: Ejemplo de sistema causal: temperatura en un tanque.
Ejemplo 2.1
Hallar la transformada de Laplace de la funcion escalon unitario µ(t) definida como:
µ(t) =
1 si t ≥ 00 si t < 0
Solucion: Usando la definicion dada en (2.1) con g(t) = µ(t):
G(s) = L[µ(t)] =
∫ ∞
0µ(t)e−stdt =
∫ ∞
0(1)e−stdt =
[−e−st
−s
]∞
0
=e−∞ − e−0
−s=
1
s
Ejemplo 2.2
Hallar la transformada de Laplace de la funcion escalon unitario retardado µ(t − T )donde T es real y positivo. La funcion µ(t − T ) se define como:
µ(t − T ) =
1 si t ≥ T0 si t < T
Solucion: La transformada de Laplace de µ(t− T ) se halla empleando la propiedad(5) (desplazamiento en tiempo) de la Tabla 2.2 con t0 = T , sabiendo que G(s) = 1/spor el ejemplo anterior. Esto es:
L[µ(t − T )] = e−TsG(s) = e−Ts 1
s=
e−Ts
s
Ejemplo 2.3
Hallar la transformada de Laplace de la funcion exponencial e−at, donde a y t sonreales y positivos.
Solucion: Usando la definicion dada en (2.1):
L[e−at] =
∫ ∞
0e−ate−stdt =
[−e−(s+a)t
s + a
]∞
0
=1
s + a

2.1 La Transformada Unilateral de Laplace 11
Ejemplo 2.4
Hallar la transformada de Laplace de las funciones impulso δ(t) y δ(t−T ) empleandola siguiente propiedad fundamental:
∫ ∞
0g(t)δ(t − T )dt = g(T ) (2.2)
donde g(t) es una funcion arbitraria pero continua en t = T . Se sabe ademas que lafuncion impulso unitario o delta de Dirac δ(t) y delta de Dirac retardada δ(t− T ) sedefinen como:
δ(t) =
1 si t = 00 si t 6= 0
δ(t − T ) =
1 si t = T0 si t 6= T
(2.3)
Solucion: Aplicando la propiedad fundamental (2.2) con g(t) = e−st y T = 0 seobtiene:
L[δ(t)] =
∫ ∞
0e−stδ(t − T )dt = e−sT |T=0 = 1
Aplicando ahora la propiedad fundamental con g(t) = e−st y retardo T resulta:
L[δ(t − T )] =
∫ ∞
0e−stδ(t − T )dt = e−sT = z−1
La relacion: z = esT constituye la variable discreta de desplazamiento y se empleapara el analisis de sistemas lineales discretos con parametros invariantes con el tiempo.
Ejemplo 2.5
Usando matematica simbolica, hallar la transformada de Laplace de las siguientesfunciones:
g1(t) = aµ(t) g2(t) = e−at g3(t) =dg(t)
dt
g4(t) = a sin(t)cos(t)2 g5(t) =
∫ t
0(t2 + cos 2t)
donde a es una constante real y positiva, µ(t) es la funcion escalon unitario definidaen el ejemplo 2.1 y g(t) es una funcion arbitraria dependiente del tiempo.
Solucion: El programa laplace1.m resuelve el problema.
% laplace1.m TRANSFORMADA SIMBOLICA DE LAPLACE
clear all; close all; clc;
syms a t s;
G1 =laplace(a,t,s); % G1 = a/s
G2 = laplace(exp(-a*t),t,s); % G2 = 1/(s+a)
G3 = laplace(diff(sym(’g(t)’))); % G3 = s*laplace(g(t),t,s)-g(0)
G4 = laplace(a*sin(t)*cos(t)^2,t,s); pretty(G4)
% G4 = a*(s^2 + 3)/((s^2 + 9)(s^2+1))
g5 = int(t^2+cos(2*t)); G5 = laplace(g5); % G5 =2/s^4 + 1/(s^2+4)

12 Sistemas Continuos
2.1.2. La Transformada Inversa de Laplace
La transformada inversa de Laplace de una funcion G(s) se denota como:
g(t) = L−1[G(s)] (2.4)
Ejemplo 2.6
Usando matematica simbolica, hallar la transformada inversa de Laplace de las si-guientes funciones:
G1(s) =s + 3
s2G2(s) =
Aw
(s − a2) + w2
donde w es una constante real y positiva.
Solucion: El programa laplace2.m resuelve el problema.
% laplace2.m
clear all; close all; clc; syms s w a A
G1=(s+3)/s^2; g1 = ilaplace(G1); % g1 = 1 + 3*t
G2=A*w/((s-a)^2+w^2); g2 = ilaplace(G2); % g2 = A*e^(a*t)*sin(w*t)
Ejemplo 2.7
La figura 2.2 muestra un movil de masa m = 1000 kg desplazandose con una velocidadv gracias a la accion de la fuerza u producida por su motor. Si se desprecia la inerciade las ruedas y se asume que la fuerza de friccion bv es lo unico que se opone almovimiento, donde b= 50 N–s/m es el coeficiente de friccion, entonces la dinamicadel sistema puede modelarse como:
mv(t) + bv(t) = u(t) v(t) =dv(t)
dt
Determine la velocidad v(t) y la aceleracion v(t) del carro como respuesta a unafuerza u(t) tipo escalon de 1 N. Considere que la fuerza comienza a actuar para unavelocidad inicial del carro de 2 m/s.
ubvfriccion
v velocidad
m
Fig. 2.2: Movil en movimiento.
Solucion: Teniendo en cuenta que v(0) = 2 m/s, V (s) = L[v(t)] y U(s) = L[u(t)],apliquemos la propiedad de derivacion (2) de la Tabla 2.2 en la ecuacion dinamicadel carro:
m(sV (s) − v(0)) + bV (s) = U(s)

2.1 La Transformada Unilateral de Laplace 13
V (s) =1/m
s(s + b/m)+
v(0)
s + b/m
donde hemos usado el hecho de que U(s) = 1s debido a que la entrada u es del tipo
escalon. La salida v(t) se determina usando la Tabla 2.1. Para el primer termino deV (s) empleamos la formula (14) con n = 1, mientras que para el segundo terminoempleamos la formula (3). Por consiguiente:
v(t) = L−1[V (s)] =1
b(1 − e−
bm
t) + v(0)e−bm
t
La derivada de v(t) produce la aceleracion pedida:
v =1
m[1 − bv(0)] e−
bm
t
Ejemplo 2.8
Empleando las propiedades del valor inicial y del valor final de la Tabla 2.2, deter-minar tales valores para la velocidad del movil del problema anterior.
Solucion: El valor inicial de v(t) se determina de:
lımt→0
v(t) = lıms→∞
sV (s) = v(0)
El valor final v(t) se obtienen de:
lımt→∞
v(t) = lıms→0
sV (s) =1
b
2.1.3. La Funcion de Transferencia
La funcion de transferencia FT de un sistema SISO (Single Input Single Output)se define como la relacion:
G(s) =Y (s)
U(s)
donde Y (s) es su salida y U(s) es su entrada, asumiendo que todas las condicionesiniciales son nulas. La FT se puede interpretar como el sello que caracteriza la dinami-ca de un sistema, ya que se expresa en funcion de los parametros de dicho sistema.Distintos sistemas pueden poseer una misma forma de la FT, pero con parametroscompletamente diferentes. Por ejemplo, los sistemas velocidad de un motor DC, nivelen un tanque de agua con orificio de salida y un movil con desplazamiento horizontalposeen la siguiente forma de su FT:
Y (s)
U(s)=
K
τs + 1
Ejemplo 2.9
Determinar la FT del movil del ejemplo 2.7. Luego determine la velocidad v(t) delmovil partiendo de su FT, como respuesta a una fuerza u(t) tipo escalon de 1 N.

14 Sistemas Continuos
Solucion: La FT del sistema se obtiene aplicando la propiedad de derivacion (2) dela Tabla 2.2), con v(0) = 0:
m[sV (s) − v(0)] + bV (s) = (ms + b)V (s) = U(s);V (s)
U(s)=
1/m
s + b/m
Observar que resulta una FT de primer orden. Como la entrada es un escalon unitario,entonces U(s) = 1
s . La salida se determina de:
v(t) = L−1[V (s)] = L−1
[1/m
s(s + b/m)
]
Usando la formula (14) (con n = 0) de la Tabla 2.1 resulta:
v(t) =1
b(1 − e−
bm
t)
Ejemplo 2.10
Empleando las propiedades del valor inicial y del valor final de la Tabla 2.2, deter-minar tales valores para la velocidad del movil del problema anterior.
Solucion: El valor inicial se determina de:
lımt→0
v(t) = lıms→∞
sV (s) = 0
El valor final se obtiene de:
lımt→∞
v(t) = lıms→0
sV (s) =1
b
2.1.4. Fracciones Parciales
Una funcion o fraccion racional de la forma B(s)A(s) es propia cuando el grado del
polinomio B(s) del numerador es menor que el grado del polinomio A(s) del nume-
rador. Cualquier funcion o fraccion racional propia de la forma B(s)A(s) se puede escribir
como una suma de funciones racionales de la forma:
C
(as + b)r
Cs + D
(as2 + bs + c)rr = 1, 2., 3, . . .
Si A(s) y B(s) poseen el mismo grado, entonces:
B(s)
A(s)= k +
R(s)
A(s)
donde k es una constante y la fraccion R(s)A(s) resulta propia.
Ejemplo 2.11

2.1 La Transformada Unilateral de Laplace 15
Tabla 2.1: Transformadas unilaterales de Laplace
No G(s) g(t)
(1) 1 δ(t)
(2) 1s µ(t)
(3) 1s+a e−at
(4) ωs2+ω2 sen ωt
(5) ss2+ω2 cos ωt
(6) s cos α−ωsenαs2+ω2 cos(ωt + α)
(7) ω(s+a)2+ω2 e−atsenωt
(8) (s+a)(s+a)2+ω2 e−atcosωt
(9) (s+a)cosα−ωsenα(s+a)2+ω2 e−atcos(ωt + α)
(10) 1s[(s+b)2+a2]
[1−e−bt(cos at+ ba
sen at)]a2+b2
(11) n!sn+1 ; n! = n(n − 1) . . . tn
(12) 1(s+a)n+1
tn
n! e−at
(13) s(s+a)n+1
tn+1
(n+1)! (1 + atn )e−at
(14) 1s(s+a)n+1
[1−∑n
ν=0(at)ν
ν!e−at
]
an+1
(15) ss2(s+a)2
[at−2+(2+at)e−at]a3
(16) 1(s+a)(s+b) (e−at − e−bt)/(b − a)
(17) s(s+a)(s+b) (be−bt − ae−at)/(b − a)
(18) 1s(s+a)(s+b)
1ab
(1 − be−at−ae−bt
b−a
)
(19) 1s2(s+a)(s+b)
tab − 1
a2b− 1
ab2+ 1
b−a
(1a2 e−at − 1
b2e−bt
)
(20) 1(s+a)(s+b)(s+c)
e−at
(b−a)(c−a) + e−bt
(a−b)(c−b) + e−ct
(a−c)(b−c)
(21) s(s+a)(s+b)(s+c)
ae−at
(a−b)(c−a) + be−bt
(b−a)(c−b) + ce−ct
(c−a)(b−c)

16 Sistemas Continuos
Transformadas unilaterales de Laplace (continuacion)
No G(s) g(t)
(22) s2
(s+a)(s+b)(s+c)a2e−at
(b−a)(c−a) + b2e−bt
(a−b)(c−b) + c2e−ct
(a−c)(b−c)
(23) 1s(s+a)(s+b)(s+c)
1abc
[1 − bce−at
(b−a)(c−a) −cae−bt
(a−b)(c−b) −abe−ct
(a−c)(b−c)
]
(24) 1(s+a)(s+b)2
1(b−a)2
e−at − [1 + (b − a)t]e−bt
(25) s(s+a)(s+b)2
1(b−a)2
−ae−at + [a + (b − a)bt]e−bt
(26) s2
(s+a)(s+b)21
(b−a)2
a2e−at − [2ab − b2 + (b − a)b2t]e−bt
(27) 1s(s+a)(s+b)2
1ab2
[1 − b2e−at
(b−a)2+ 2ab−a2+ab(b−a)t
(b−a)2e−bt
]
(28) 1s[(s+b)2+a2]
1a2+b2
[1 − e−bt(cos at + b
a senat)]
(29) ω2n
s2+2ζωns+ω2n
ζ < 1; ω2n
ωde−δtsen ωdt
(30) sω2n
s2+2ζωns+ω2n
ζ < 1; ω2n e−δtsen (ωdt − θ)
(31) ω2n
s(s2+2ζωns+ω2n)
ζ < 1; 1 − ωnωd
e−δtsen (ωdt + θ)
(32) ω2n
s(s2+2ζωns+ω2n)
ζ > 1; 1 − T1e−t/T1−T2e−t/T2
T1−T2
ωd = ωn
√1 − ζ2
θ = arc cos ζ = arc cos (ωd/ωn)
δ = ζ ωn
T1,2 = 1ωn
(ζ ±√
ζ2 − 1)
Los siguientes tres ejemplos ilustran la expansion en fracciones parciales:
3s + 2
s(4s + 3)(2s + 5)2=
C
s+
D
4s + 3+
E
(2s + 5)2+
F
(2s + 5)
7s2 − 2s + 1
(s2 + 2s + 4)2(s + 1)=
Cs + D
(s2 + 2s + 4)2+
Es + F
s2 + 2s + 4+
H
s + 1
s2 − 9
s2 − 1= 1 − 8
(s + 1)(s − 1)= 1 −
C
s + 1+
D
s − 1
A manera de ilustracion, el valor de H del segundo ejemplo se calcula multiplicandoambos miembros de la igualdad por el factor (s+1), para poder aislar H. La relacionresultante se evalua con la solucion de la ecuacion (s + 1) = 0; es decir, se evalua en

2.1 La Transformada Unilateral de Laplace 17
Tabla 2.2: Propiedades de la transformada de Laplace
No Descripcion Propiedad
(1) Linealidad L[a1g1(t) + a2g2(t)] = a1L[g1(t)] + a2L[g2(t)]
= a1G1(s) + a2G2(s)
(2) Derivacion L[
dg(t)dt
]= sG(s) − g(0)
(3) Derivacion de orden n L[
dng(t)dtn
]= snG(s) − sn−1g(0) − sn−2 dg(0)
dt − · · ·−sdgn−2(0)
dtn−2 − dgn−1(0)dtn−1
(4) Integral L[∫ t
0 g(t)dt]
= G(s)s
(5) Desplazamiento en tiempo L[g(t − t0)] = e−t0sG(s)
(6) Desplazamiento en frecuencia L[e−atg(t)] = G(s + a)
(7) Escalamiento L[g(at)] = 1aG( s
a)
(8) Valor inicial lımt→0 g(t) = lıms→∞ sG(s)
(9) Valor final lımt→∞ g(t) = lıms→0 sG(s)
(10) Multiplicacion por tn L[tng(t)] = (−1)n dnG(s)dsn
(11) Division entre t L[g(t)/t] =∫∞0 G(t)dt
s = −1 como sigue:
H =
(7s2 − 2s + 1)(s + 1)
(s2 + 2s + 4)2(s + 1)− (Cs + D)(s + 1)
(s2 + 2s + 4)2+
(Es + F )(s + 1)
s2 + 2s + 4
s=−1
=10
9
Comando para Expandir Fracciones Racionales
El comando [r,p,k] = residue(B,A) permite expandir una fraccion racional en laforma siguiente:
B(s)
A(s)=
r1
s − p1+
r2
s − p2+ · · · + rn
s − pn+ k(s) (2.5)
donde p1, . . . , pn son los n polos que no se repiten, r1, . . . , rn son los residuos y k(s)comprime los terminos directos. Los coeficientes de los polinomios A(s) y B(s) seintroducen como vectores. Por ejemplo, A(s) = s4 + 5s2 − s − 3 produce el vector:
A = [1 0 5 –1 –3]. Si B(s)A(s) posee polos repetidos, por ejemplo, si su polo pj es de
multiplicidad m, entonces la expansion incluye terminos de la forma:
rj
s − pj+
rj+1
(s − pj)2+ · · · + rj+m−1
(s − pj)m
donde rj , . . . , rj+m−1 son los correspondientes residuos. Si en (2.5) el grado de B(s)es menor que el de A(s), entonces k(s) = 0. Si son iguales, k(s) es una constante.Todos los polos y los residuos estan contenidos en los vectores p y r respectivamente.

18 Sistemas Continuos
Ejemplo 2.12
El programa fracp1.m descompone en fracciones parciales las expresiones:
B(s)
A(s)=
s2 − 16
s2 − 1
N(s)
M(s)=
s + 6
(s − 2)2=
s + 6
s2 − 4s + 4
% fracp1.m DESCOMPOSICION EN FRACCIONES PARCIALES
clear all; close all; clc;
B = [1 0 -16]; A = [1 0 -1]; % PRIMER CASO
[r,p,k] = residue(B,A); % r = [7.5;-7.5]; p = [-1;1]; k = 1
M = [1 6]; N = [1 -4 4]; % SEGUNDO CASO
[rr,pp,kk] = residue(M,N); % rr = [1;8]; pp = [2;2]; kk = 0;
Por consiguiente:
B(s)
A(s)=
7.5
s + 1+
−7.5
s − 1+ 1
N(s)
M(s)=
1
s − 2+
8
(s − 2)2
Ejemplo 2.13
Hallar la transformada inversa de Laplace de:
G(s) =B(s)
A(s)=
s4 + 2s3 + 3s2 + 2s + 1
s4 + 4s3 + 7s2 + 6s + 2
Solucion: El programa fracp2.m calcula los vectores r, p y k:
r = [ r1 ; r2 ; rj ; rj+1 ] = [ −0.5i ; 0.5i ; −2 ; 1 ]
p = [ p1 ; p2 ; pj ; pj+1 ] = [(−1 + i) ; (−1 − i) ; −1 ; −1] k = 1
Dado que todas las raıces en el vector r son distintas:
G(s) = k +r1
s − p1+
r2
s − p2+
rj
s − pj+
rj+1
(s − pj)2
= 1 +−0.5i
s + 1 − i+
0.5i
s + 1 + i+
−2
s + 1+
1
(s + 1)2
Es facil demostrar que:
−0.5i
s + 1 − i+
0.5i
s + 1 + i=
1
2
2
(s2 + 2s + 2)=
1
2
ω2n
s2 + 2ζωns + ω2n
donde, por igualacion: ωn =√
2, ζ = 1/√
2. Por consiguiente:
G(s) = 1 +1
2
2
(s2 + 2s + 2)+
−2
s + 1+
1
(s + 1)2
Empleando los pares (1), (29), (3) y (12) de la Tabla 2.1, con n = 1, se obtiene:
L−1[1] = δ(t) L−1
[ω2
n
s2 + 2ζωns + ω2n
]=
ω2n
ωde−δtsen ωdt
L−1
[1
s + 1
]= e−t L−1
[1
(s + 1)2
]= te−t
donde, ωd = 1 y δ = 1, se calcularon empleando las formulas al final de la continuacionde la Tabla 2.1. Por consiguiente, juntando los resultados anteriores se obtiene:
g(t) = δ(t) + e−tsen t − 2e−t + te−t

2.1 La Transformada Unilateral de Laplace 19
% fracp2.m DESCOMPOSICION EN FRACCIONES PARCIALES
clear all; close all; clc;
B = [1,2,3,2,1]; % POLINOMIO B(s)
A = [1,4,7,6,2]; % POLINOMIO A(s)
[r,p,k] = residue(B,A);
% r = [-0.5i;0.5i;-2;1]; p = [-1+i;-1-i;-1;-1]; k = 1
Ejemplo 2.14
Resolver la siguiente ecuacion diferencial:
d2y(t)
dt2+ 11
dy(t)
dt+ 24y(t) = e−6t
con las condiciones iniciales nulas: dy(0)dt = 0, y(0) = 0.
Solucion: Empleamos la propiedad de derivacion de la Tabla 2.2:
L
[d2y(t)
dt2+ 11
dy(t)
dt+ 24y(t)
]= L
[e−6t
]
[s2Y (s) − sy(0) − dy(0)
dt
]+ 11(sY (s) − y(0)) + 24Y (s) =
1
s + 6
Y (s) =1
(s + 3)(s + 8)(s + 6)=
3/80
s + 3+
1/60
s + 8+
1/48
s + 6
y(t) =3
80e−3t +
1
60e−8t +
1
48e−6t
2.1.5. Algebra de Bloques
La Fig. 2.3 muestra las transformaciones validas entre bloques y sus correspon-dientes diagramas de flujo de senales. Cabe anotar que cada bloque representa unaFT. En un diagrama de flujo de senales, cada bloque se transforma en una linea condireccion y ganancia, mientras que cada punto de suma o de derivacion se transformaen una senal, la cual se representa por un cırculo.
Por ejemplo, en el diagrama de bloques mostrado en la Fig. 2.3(f), las senales r,e e y, se convierten en cırculos en su diagrama de flujo de senales, mientras que lasganancias G y H pasan a ser las lıneas que conectan los bloques. Notar que estaslıneas poseen direccion y ganancia. La FT entre x1 y x2, mostrada en su diagramaequivalente, se deriva como sigue:
x2(s) = G(s)e(s) = G(s)(x1(s) ± H(s)) → x1(s)
x2(s)=
G(s)
1 ∓ GH(s)

20 Sistemas Continuos
G1 GH
G
1 GHG
r y
G G
G
G
G
G GG
G1 G2 G G1 2 G G
(a)
(b)
(c)
(d)
(e)
(f)
H
r ye yr
G
H
r e y1
r
y
r
rGr 1
1/G
y
e
e
uu
e
r GGr e
r r
r e
1e
e
G
r
e
er u
yr e uG1
1y
r
r u
y
1
G
G u
u
y
G G1 2
yeu
u e y G1G 2
u y
u y
r
r
e
r e
r1
G1/G
r
r
e
Gr e
r
u
yuG
y1
u1
1/G
1/G
Fig. 2.3: Diagramas de bloque, sus correspondientes diagramas de flujo de senales ysus equivalentes.
2.2. Matrices y Determinantes
Una matriz A de orden o dimension n×m, escrita con letra mayuscula en negrita,es un arreglo rectangular con sus elementos aij dispuestos en n filas y m columnas.Es decir:
A = [aij ] =
a11 . . . a1m...
...an1 . . . anm
i = 1, . . . , n; j = 1, . . . , m
Los elementos de una matriz pueden ser numeros reales o complejos, funciones, otrasmatrices, etc. Cuando n = 1, A se convierte en un vector fila. Cuando m = 1, Atoma la forma de un vector columna. Los vectores se denotan en negrita. Por ejemplo,los vectores columna x(q) y fila y(q) de orden n y dependiente del argumento q serepresentan como:
x(q) =
x1(q)...
xn(q)
y(q) =
[y1(q) · · · yn(q)
]

2.2 Matrices y Determinantes 21
Dos formas de denotar los correspondientes vectores fila y columna son:
xT (q) =[
x1(q) · · · xn(q)]; x(q) =
[x1(q) · · · xn(q)
]T
yT (q) =
y1(q)...
yn(q)
y(q) =
y1(q)...
yn(q)
T
donde el superındice T indica la operacion transpuesta, la cual transforma las colum-nas en filas y viceversa.
2.2.1. Operaciones con Matrices
Una matriz A con todos sus elementos aij iguales a cero se denomina matriz ceroo nula y se denota como A = 0. Dos matrices A = [aij ] y B = [bij ] son iguales si sondel mismo orden y ademas [aij ] = [bij ].
La suma de dos matrices, denotada como C = A ± B, solo es posible si A y Bson del mismo orden:
C = [cij ] = A ± B = [aij ± bij ]
La multiplicacion de dos matrices, expresada como C = AB, solo es posible si elnumero de columnas de A es igual al numero de filas de B. Si A es de orden n × my B es de orden m × r, entonces C debe ser de orden n × r. Los elementos de C sedeterminan como sigue:
cij =m∑
k=1
aikbkj ; i = 1, 2, . . . , n; j = 1, 2, . . . , m
Por ejemplo, la siguiente multiplicacion es valida: A2×3B3×1 = C2×1, tal como seobserva a continuacion.
[a11 a12 a13
a21 a22 a23
]
b11
b21
b31
=
[c11
c21
]=
[a11b11 + a12b21 + a13b31
a21b11 + a22b21 + a23b31
]
Si κ es un escalar, entonces κA resulta una matriz en donde cada elemento quedamultiplicado por κ, a saber:
κA = κ[aij ] = [κaij ]
La multiplicacion es asociativa:
ABCD = (AB)(CD) = A(BCD) = (ABC)D
y distributiva:(A + B)(C + D) = AC + AD + BC + BD
Cuando AB = BA, se dice que A y B son matrices que conmutan. Sin embargo, engeneral, la multiplicacion no es conmutativa; es decir:
AB 6= BA

22 Sistemas Continuos
Ejemplo 2.15
Determinar si las matrices A y B conmutan o no.
A =
1 2 30 4 −22 6 −9
B =
1 2 30 4 −22 6 −9
Solucion: Dado C = AB y D = BA, basta demostrar que C 6= D, tal como seilustra en el siguiente programa.
% conmat.m CONMUTACION DE MATRICES
clear all; close all; clc;
A = [1 2 3;0 4 -2;2 6 -9]; B = [-1 5 0;1 4 -3;0 -6 -2];
C = A*B; % C = [1 -5 -12;4 28 -8;4 88 0]
D = B*A; % D = [-1 18 -13;-5 0 22;-4 -36 30]
% A Y B NO SON CONMUTATIVAS PORQUE C ES DIFERENTE DE D
Si AB = 0, implica que A = 0 o B = 0, o que A y B sean singulares. Lasmatrices A y B son singulares si det(A) = 0 y det(B) = 0 donde det es la operaciondeterminante, la cual se trata mas adelante.
Si AB = AC, no necesariamente implica que B = C.La matriz transpuesta, denotada como AT , es la matriz A con sus filas y columnas
intercambiadas. Por consiguiente:
(AT )T = A; (A + B)T = AT + BT ; (AB)T = BTAT
Un numero complejo se designa como s = σ + jω, donde j =√−1 es la unidad
de los numeros imaginarios y tanto σ como ω son numeros reales. La operacionconjugada, denotada como A∗, toma la conjugada a todos los elementos complejosde A. Para la operacion conjugada se cumple:
(A∗)∗ = A; (A + B)∗ = A∗ + B∗; (AB)∗ = A∗B∗
La operacion hermitiana de A, denotada como AH , toma la conjugada y luego latranspuesta (o toma la transpuesta y luego la conjugada) de la matriz A. Es decir:
AH = (A∗)T = (AT )∗
Por consiguiente:
(AH)H = A; (A + B)H = AH + BH ; (AB)H = BHAH
Si A es una matriz real; es decir, si todos sus elementos son reales, entonces A∗ = Ay AH = (A∗)T = AT .
Ejemplo 2.16
Dada la matriz real A y la matriz compleja B hallar A∗, AH , AT , BT , B∗ y BH .
A =
1 2 30 4 −22 6 −9
B =
1 − j 3 3 + jj 4 −2 + j
2 − j 6 + j −9

2.2 Matrices y Determinantes 23
Solucion:
A∗ = A AH = AT =
1 0 22 4 63 −2 −9
BT =
1 − j j 2 − j3 4 6 + j
3 + j −2 + j −9
B∗ =
1 + j 3 3 − j−j 4 −2 − j
2 + j 6 − j −9
BH = (BT )∗ =
1 + j −j 2 + j3 4 6 − j
3 − j −2 − j −9
2.2.2. Tipos de Matrices
Si el orden de una matriz A es n × n, entonces A es una matriz cuadrada deorden n. Esta matriz posee una diagonal principal, o simplemente una diagonal conelementos aii. La traza de una matriz cuadrada se define como:
traza(A) = a11 + · · · + ann
Una matriz cuadrada se denomina matriz diagonal cuando los elementos que nopertenecen a su diagonal son todos ceros:
D = [dii] =
d11 0 0 . . . 00 d22 0 . . . 0...
......
...0 0 0 . . . dnn
Una matriz cuadrada se denomina triangular superior si los elementos debajo desu diagonal son todos ceros. Si los elementos encima de su diagonal son todos ceros,entonces la matriz es triangular inferior.
La matriz identidad I, denotada tambien como In (n es el orden de la matriz), esuna matriz diagonal que solo posee unos. Si A es cuadrada, AI = IA. En general, secumple que:
A es simetrica si: AT = A (2.6)
A es antisimetrica si: AT = −A (2.7)
A es hermitiana si: AH = (AT )∗ = (A∗)T = A (2.8)
A es antihermitiana si: AH = −A (2.9)
A es ortogonal si: AAT = ATA = I, entonces: AT = A−1 (2.10)
A es unitaria si: AAH = AHA = I, entonces: AH = A−1 (2.11)
A es normal si: AAH = AHA (2.12)
A es periodica si: Aκ+1 = A; κ es un entero positivo (2.13)
A es nilpotente si: Aκ = 0; κ es un entero positivo (2.14)
A−1 es la inversa de A si: A−1A = I (2.15)
A es singular si: det(A) = 0 (2.16)

24 Sistemas Continuos
Una matriz compleja cuadrada A puede ser escrita como la suma de una matrizhermitiana B = 1
2(A + AH) mas otra matriz antihermitiana C = 12(A − AH). Es
decir:
A = B + C =1
2(A + AH) +
1
2(A − AH)
Ejemplo 2.17
Demostrar que B = 12(A + AH) y C = 1
2(A − AH) son matrices hermitiana yantihermitiana respectivamente, donde A es la siguiente matriz compleja:
A =
[1 + j 2 − j6 + j 5 − j
]
Solucion:
AH = (A∗)T =
[1 − j 6 − j2 + j 5 + j
]
B =1
2(A + AH) =
[1 4 − j
4 + j 5
]BH = (B∗)T = B
C =1
2(A − AH) =
[j −22 −j
]CH = (C∗)T = −C
2.2.3. Determinantes y Matriz Inversa
Determinantes
El determinante de la matriz A = [aij ] de orden 2 es:
det
[a11 a12
a21 a22
]= a11a22 − a12a21 (2.17)
Para obtener el determinante de una matriz de orden n > 2 podemos emplear elmetodo de la expansion. Si tomamos como base la primera fila, el determinante deuna matriz A se obtiene de:
det(A) =n∑
j=1
(−1)1+ja1jdet(A1j) = (−1)1+1a11det(A11) + (−1)1+2a12det(A12) + · · ·
donde A1j , j = 1, . . . , n es la matriz que resulta luego de eliminar la fila 1 y lacolumna j de A. Por ejemplo, el determinante de una matriz de orden n = 3 secalcula como:
det
a11 a12 a13
a21 a22 a23
a31 a32 a33
= (−1)1+1a11det
[a22 a23
a32 a33
]+
(−1)1+2a12det
[a21 a23
a31 a33
]+ (−1)1+3a13det
[a21 a22
a31 a32
](2.18)
Con relacion a dos matrices cuadradas A y B de orden n:

2.2 Matrices y Determinantes 25
1. Si cada elemento de una fila o columna de A es cero, entonces det(A) = 0.
2. det(A) = det(AT ).
3. Si la constante real κ multiplica una fila o una columna de A, entonces el det(A)queda multiplicado por κ.
4. Si la matriz B se obtiene intercambiando dos filas o dos columnas de A, entoncesdet(B) = −det(A).
5. Si dos filas o columnas de A son iguales, entonces det(A) = 0.
6. Si sumamos un multiplo de una fila o una columna de A a cualquiera de susfilas o columnas, el valor del det(A) no cambia.
7. det(AB) = det(BA) = det(A)det(B)
8. Si los eigenvalores de A son λ1, λ2, . . . , λn, luego: det(A) = λ1λ2 . . . λn. Ladeterminacion de los eigenvalores o valores propios de una matriz se trata en lasubseccion 2.2.4.
Matriz inversa
Si A y B son dos matrices no singulares; es decir, si det(A) 6= 0 y det(B) 6= 0,entonces:
(AB)−1 = B−1A−1; (AT )−1 = (A−1)T
((A∗)T )−1 = ((A−1)∗)T ; det(A−1) =1
det(A)
Si A es una matriz no singular de orden 2, vale recordar que:
A =
[a bc d
]; A−1 =
1
ad − bc
[d −b−c a
](2.19)
Del mismo modo, si A es una matriz no singular de orden 3:
A =
a b cd e fg h i
A−1 =1
det(A)
det
[e fh i
]−det
[b ch i
]det
[b ce f
]
−det
[d fg i
]det
[a cg i
]−det
[a cd f
]
det
[d eg h
]−det
[a bg h
]det
[a bd e
]
(2.20)
det(A) = aei + gbf + cdh − gec − ahf − idb
Ejemplo 2.18
Comprobar simbolicamente las formulas de la inversa y del determinante de A dadasen (2.20).
Solucion: Ejecutar el programa matinv.m mostrado abajo.

26 Sistemas Continuos
% matinv.m INVERSA Y DETERMINANTE DE UNA MATRIZ EN FORMA SIMBOLICA
clear all; close all; clc;
syms a b c d e f g h i % COMANDO syms GENERA SIMBOLOS
A = [a b c;d e f;g h i]; % MATRIZ SIMBOLICA
invA = inv(A); pretty(invA) % DEVUELVE INVERSA DE A
detA = det(A); pretty(detA) % DEVUELVE DETERMINANTE DE A
% aei - a f h - i d b + d c h + g b f - g c e
La Tabla 2.3 muestra los comandos para ejecutar operaciones matriciales conMATLAB.
Cantidades Complejas
Sea G = Gr + jGi un numero o funcion compleja donde <e[G] = Gr es su partereal e =m[G] = Gi es su parte imaginaria. El valor absoluto o modulo o magnitudde G se denota como |G| mientras que el angulo o argumento de G se expresa como∠ G. Luego, G se puede formular como:
G = <e[G] + j=m[G] = |G|∠ G (2.21)
|G| =∣∣∣√
(<e[G])2 + (=m[G])2∣∣∣ ∠ G = arctan
(=m[G]
<e[G]
)
Si G es un vector o matriz compleja con elementos complejos Gij , entonces las ope-raciones anteriores se ejecutan elemento por elemento; es decir:
<e[G] = <e[Gij ]; =m[G] = =m[Gij ]
G = |G|∠G = |Gij |∠ Gij ; |G| = |Gij |; ∠G = ∠ Gij
Ejemplo 2.19
Calcular en forma grafica y usando MATLAB el angulo y el modulo de:
G = [−1 − j − 3 + 4j 1 −√
3j] = [G11 G12 G13]
Solucion: Los elementos de G corresponden a triangulos notables mostrados en laFig. 2.4. Ejecutando el programa trnot.m se obtiene la misma solucion.
G11 = 2 −135º G13 = 2 −60ºG12 = 5 127º
−j
−1
2−135º
−3
4j
5127º
j
1
−60º
2
3
Fig. 2.4: Triangulos notables para el problema 2.19.

2.2 Matrices y Determinantes 27
% trnot.m NUMEROS COMPLEJOS
clear all; close all; clc;
G11 = -1-j; G12 = -3+4j; G13 = 1-sqrt(3)*j; G = [G11 G12 G13];
anguloG = angle(G)*(180/pi); % (180/pi) CONVIERTE rad A GRADOS
% anguloG = [-135 126.8699 -60]
moduloG = abs(G); % moduloG = [1.4142 5 2]; 1.4142 = sqrt(2)
Tabla 2.3: Comandos para computo matricial
Operacion Codigo MATLAB
Suma A + B A + B
Resta A − B A - B
Multiplicacion AB A*B
Multiplicacion κA kappa*A
Conjugada A∗ conj(A)
Transpuesta (A real) AT A’
Transpuesta (A compleja) AT conj(A’); A.’
Hermitiana AH A’
Potencia An A^n
Determinante det(A) det(A)
Inversa A−1 inv(A)
Division izquierda A*X = B; X = A\ B
Division derecha X*A = B; X = B/A
Valor absoluto |A| abs(A)
Angulo ∠ A angle(A)
Parte real <e[A] real(A)
Parte imaginaria =m[A] imag(A)
Traza∑n
i=1 aii trace(A)
Matriz identidad In eye(n)
Ejemplo 2.20
Dada la matriz cuadrada A, calcular B.
A =
1 − j 2 − j 3 − j4j −2 3 + 5j
6 − j 7 − j 8 + 3j
B =(A∗ + AT − 0,7jA3)A−1AH |A|∠A <e[A]=m[A]
(2j + 1) traza(A)det(A)
Luego, comprobar que M = 12(B + BH) y N = 1
2(B − BH) son sus matrices hermi-tiana y antihermitiana respectivamente.
Solucion: El programa calmat.m calcula la matriz B pedida. Ademas, por ser her-mitiana: M = MH , y por ser antihermitiana: N = −NH . Entonces basta comprobarque M − MH = 0 y que N + NH = 0.

28 Sistemas Continuos
% calmat.m CALCULO MATRICIAL COMPLEJO
clear all; close all; clc;
A = [1-j 2-j 3- j;4j -2 3+5j;6-j 7-j 8+3j]; % MATRIZ DATO
B = (conj(A)+conj(A’)-0.7j*A^3)*inv(A)*A’*abs(A)* ...
angle(A)*real(A)*imag(A)/((2*j+1)*trace(A)*det(A));
M = (B + B’)/2; % M ES HERMITIANA PORQUE M=M’ O M-M’=0
N = (B - B’)/2; % N ES ANTIHERMITIANA PORQUE M=-M’ O M+M’=0
Ejemplo 2.21
Multiplicacion con Particion de Matrices.– Dos matrices Anm y Bmp (lossubındices indican las dimensiones) pueden ser particionadas como sigue:
A =
An1m1 · · · An1mm
......
Annm1 · · · Annmm
; B =
Bm1p1 · · · Bm1pp
......
Bmmp1 · · · Bmmpp
La condicion necesaria para realizar el producto Cnp = AnmBmp empleando parti-ciones, es que las columnas de A y las filas de B sean particionadas en la mismaforma. Por lo tanto, n = n1 + · · · + nn, m = m1 + · · · + mm y p = p1 + · · · + pp.
Ejemplo 2.22
Empleando la regla descrita determinar si el producto siguiente es valido y si lo es,obtener C = AB.
AB =
A22 A23 A21
A32 A33 A31
A42 A43 A41
B22 B23
B32 B33
B12 B13
Solucion: Podemos notar que para las filas de A: n = 2 + 3 + 4 = 9, mientras quepara las columnas de A: m = 2 + 3 + 1 = 6. Del mismo modo, para las filas deB: m = 2 + 3 + 1 = 6, mientras que para las columnas de B: p = 2 + 3 = 5. Porconsiguiente, la particion es correcta. La multiplicacion ahora es directa:
C =
A22B22 + A23B32 + A21B12 A22B23 + A23B33 + A21B13
A32B22 + A33B32 + A31B12 A32B23 + A33B33 + A31B13
A42B22 + A43B32 + A41B12 A42B23 + A43B33 + A41B13
Ejemplo 2.23
Matriz Aumentada.– Si los vectores x, y, v y w son de orden n, m, p y q respec-tivamente, obtener una sola ecuacion diferencial matricial que reemplace a las dosecuaciones diferenciales siguientes:
dx
dt= x = Ax + Bv;
dy
dt= y = Cy + Dw
donde dxdt = x y
dydt = y denotan las derivadas de x e y con respecto al tiempo,
respectivamente.

2.2 Matrices y Determinantes 29
Solucion: Es importante notar que si x es de orden n, entonces A debe ser deorden n × n. Tambien, si v es de orden p, entonces B debe ser de orden n × p, yası sucesivamente. La ecuacion pedida se muestra a continuacion, donde 0 es la matriznula. Las dimensiones de los vectores y matrices se indican con subındices.
[xy
]=
[A 00 C
] [xy
]+
[B 00 D
] [vw
]
xn×1 = An×nxn×1 + 0n×mym×1 + Bn×pvp×1 + 0n×qwq×1
ym×1 = 0m×nxn×1 + Cm×mym×1 + 0m×pvp×1 + Dm×qwq×1
2.2.4. Rango, Eigenvectores y Pseudoinversas
Dependencia e Independencia de Vectores
Un conjunto de vectores es linealmente independiente cuando ninguno de ellos sepuede escribir como una combinacion lineal de los restantes. Al contrario, tal conjuntode vectores es linealmente dependiente cuando alguno de ellos se puede escribir comouna combinacion lineal de los demas.
Ejemplo 2.24
Determinar si los siguientes vectores son o no linealmente dependientes.
u =
182829
v =
357
w =
465
Solucion: Tal conjunto de vectores es linealmente dependiente si se demuestra queexisten dos constantes α y β no nulas que verifiquen: u = αv + βw; es decir:
182829
= α
357
+ β
465
=
3α + 4β5α + 6β7α + 5β
Resolviendo este sistema de tres ecuaciones y dos incognitas resulta: α = 2 y β = 3.Por lo tanto, el conjunto de vectores u, v y w son linealmente dependientes.
Ejemplo 2.25
Determinar si los siguientes vectores son o no linealmente independientes.
u =
123
v =
357
w =
465
Solucion: Tal conjunto de vectores es linealmente independiente si se demuestra queno existen dos constantes α y β no nulas que verifiquen: u = αv+βw. Si suponemosque dichas constantes existen, entonces:
123
= α
357
+ β
465
=
3α + 4β5α + 6β7α + 5β
El sistema de tres ecuaciones y dos incognitas resultante es incompatible y sin solu-cion. Entonces, el conjunto de vectores u, v y w es linealmente independiente.

30 Sistemas Continuos
Rango de una Matriz
Si A es una matriz de orden n×m, su rango, denotado como rango(A), es igualal numero maximo r de sus vectores filas (o columnas) linealmente independientes.En cualquier matriz, el numero de vectores filas linealmente independientes coincidecon el numero de vectores columnas linealmente independientes. Por consiguiente, elvalor maximo rmax que puede tener el rango r de una matriz de orden n × m es:rmax = min(n, m).
Si A es una matriz cuadrada de orden n×n, su rango es n siempre que A sea nosingular; es decir, si det(A) 6= 0. En otro caso, si det(A) = 0, entonces: rango(A) < n.El rango de una matriz tambien se puede determinar evaluando los determinantes desus mınimos cuadrados, tal como se ilustra en el siguiente ejemplo.
Ejemplo 2.26
Determinar el rango de las siguientes matrices empleando varios metodos:
A =
1 2 33 5 74 6 5
B =
1 3 23 8 91 2 5
Solucion: La matriz A de orden n = 3 posee rango completo (r = n = 3) por dosrazones. La primera es que ningun vector fila o vector columna es una combinacionlineal de las restantes. La segunda razon es que A es no singular.
La matriz B de orden n = 3 posee rango r = 2, porque los dos primeros vectoresfilas no son linealmente dependientes, pero el tercer vector fila si lo es, debido a quees igual al segundo vector fila menos el doble del primer vector fila. Por otro lado, sepuede comprobar que det(B) = 0, lo que implica que B no posee rango completo porser singular; es decir: rango(B) < n. Los determinantes de los mınimos cuadrados deB son:
det([1]) = 1 6= 0 det
[1 33 8
]= 1 6= 0 det
1 3 23 8 91 2 5
= 0
Por consiguiente, el rango de la matriz B es r = 2 porque el determinante del segundomınimo cuadrado es diferente de 0, mientras que el determinante del tercer mınimocuadrado es nulo.
Propiedades del Rango
Si A es una matriz de orden n × m y B es de orden m × k, se cumple:
rango(AB) = rango(AH) = rango(AHA) = rango(AAH)
rango(AB) = rango(AT ) = rango(ATA) = rango(AAT )
rango(AB) ≤ rango(A); rango(AB) ≤ rango(B)
rango(AB) = rango(A), si A y B son no singulares
rango(AB) = rango(B), si A y B son no singulares

2.2 Matrices y Determinantes 31
Ejemplo 2.27
Sean las matrices Anm, Bmp y Cmm. Demostrar numericamente que:
rango(A) ≤ mın(n, m)
rango(A) = rango(AH)
rango(AB) ≤ min(rango(A), rango(B))
rango(CB) = rango(B)
Solucion: El siguiente programa presenta las demostraciones pedidas.
% proprango.m PROPIEDADES DEL RANGO
clear all
A=[-1+j 3-5j -5+6j -2+5j;8-9j 4-2j -1+j -4;-2+3j 4-6j -2-5j 7j];
B=[1+j -3-5j;8+9j -4+2j;-2+3j -4-6j;-5-6j -2+5j];
C=[-1+j -2+j 3-j -5-7j;4-2j -1+j -4 2;4-6j -2-5j 7j -j;7j -1 9j 4j];
% DIMENSIONES DE A, B Y C SON (3,4), (2,4) Y (4,4) RESPECTIVAMENTE
rA=rank(A); rAH=rank(A’); rB=rank(B); rAB = rank(A*B); rCB=rank(C*B);
% rA=3=min(3,4); rAH=rA; rB=2; rAB=2=min(rA,rB); rCB=2=rB;
Eigenvalores y Eigenvectores
Un eigenvalor de una matriz de orden n, conocido tambien como valor propio,modo, eigenvalue, o raız caracterıstica, es un escalar λ que permite una solucion notrivial de la ecuacion:
Ax = λx (2.22)
Factorizando x en (2.22) obtenemos la ecuacion caracterıstica de A:
det(λI − A) = 0 (2.23)
Asociado con cada eigenvalor λi existe un eigenvector ei de magnitud arbitraria quees solucion de (ver (2.22)):
Aei = λiei (2.24)
La matriz E de eigenvectores para una matriz A de orden n toma la forma:
E =[
e1 · · · en
]=
e11 · · · e1n...
. . ....
en1 · · · enn
Un eigenvector normalizado se define como: ei = ei|ei| . Por ejemplo, el vector e1 se
calcula como:
e1 =e1
|e1|e1 =
e11...
en1
|e1| =
√e211 + · · · + e2
n1
Ejemplo 2.28

32 Sistemas Continuos
Determinar los eigenvalores y eigenvectores del sistema siguiente:
[x1
x2
]=
[1 24 3
] [x1
x2
]
Solucion: Los eigenvalores se determinan de (2.23):
det(λI − A) = det
([λ 00 λ
]−[
1 24 3
])= (λ − 1)(λ − 3) − 8 = 0
resultando: λ1 = −1 y λ2 = 5. Los eigenvectores se calculan de (2.24) para λ1 y λ2:Ae1 = λ1e1 y Ae2 = λ2e2, obteniendose:
e1 =1
λ1Ae1 =
[e11
−e11
]=
[1−1
]e2 =
1
λ2Ae2 =
[e12
2e12
]=
[12
]
donde las soluciones e11 = 1 y e12 = 1 son arbitrarias. Dado que |e1| =√
2 y|e2| =
√5, los eigenvectores normalizados resultan: e1 = e1/|e1| y e2 = e2/|e2|.
Ejemplo 2.29
Determinar los eigenvalores y eigenvectores para la matriz A empleando MATLAB.
1 2j 4 −3−j 5j −4 −3j0 −7j −2 −j8 6j −4 −9j
Solucion: Ejecutar el programa eig1.m.
% eig1.m CALCULO DE EIGENVALORES Y EIGENVECTORES
clear all; close all; clc;
A = [1 2j 4 -3;-j 5j -4 -3j;0 -7j -2 -j;8 6j -4 -9j];
[E,D]=eig(A); % E: MATRIZ DE EIGENVECTORES NORMALIZADOS
% D: MATRIZ DIAGONAL DE EIGENVALORES
Ejemplo 2.30
Si los λi son los eigenvalores de la matriz A de orden n, comprobar numericamente:
det(A) = λ1λ2 . . . λn; i = 1, . . . , n
Solucion: Ver el programa eig2.m.
% eig2.m COMPRUEBA QUE det(A)=L(1)L(2)L(3)L(4)
clear all
A = [1-j 2-j 3-j -3+8j
4j -2 3+5j 4-2j
6-j 7-j 8+3j 3+j
2 -1 j 0];
L = eig(A); % DETERMINA LOS EIGENVALORES DE A
detA = det(A); P = L(1)*L(2)*L(3)*L(4); % SE CUMPLE QUE: det(A) = P

2.2 Matrices y Determinantes 33
Pseudoinversas
El concepto de pseudoinversa de una matriz es la generalizacion de su inversa yresulta util para encontrar una solucion en un conjunto de ecuaciones algebraicas endonde el numero de variables desconocidas y el numero de ecuaciones linealmenteindependientes no son iguales. Sea la ecuacion:
Ax = b
donde A es una matriz de orden n×m y de rango n, x es un vector de orden m y bes un vector de orden n. Se supone que n < m. La solucion de tal ecuacion esta dadapor:
xo = AIDb AID = AT (AAT )−1
donde AID es la matriz pseudoinversa derecha (o mınima inversa derecha) de A quecumple la propiedad: AAID = In.
En forma similar, sea la ecuacion: Ax = b, donde A es una matriz de orden m×ny de rango m, x es un vector de orden n y b es un vector de orden m. Se supone quen > m. La solucion de tal ecuacion se obtiene de:
xo = AIIb AII = (ATA)−1AT
donde AII es la matriz pseudoinversa izquierda (o mınima inversa izquierda) de Aque cumple la propiedad: AIIA = Im.
Ejemplo 2.31
En pseudoinv.m se resuelven sistemas de ecuaciones empleando pseudoinversas.
% pseudoinv.m SOLUCION DE ECUACIONES USANDO PSEUDOINVERSAS
clear all; close all; clc;
A = [1+i 2+3i 3-i;4-2i 5+i 6]; b = [10-i;20+3i]; % A(2,3)*x(3,1) = b(2,1)
C = [1+i 1-i;1 2+3i;1 4-i]; d = [1;2-3i;3+i]; % C(3,2)*y(2,1) = d(3,1)
MPID = A’*(A*A’)^(-1); % MATRIZ PSEUDOINVERSA DERECHA
x = MPID*b; % VECTOR SOLUCION DE DIMENSION (3,1)
MPII = (C’*C)^(-1)*C’; % MATRIZ PSEUDOINVERSA IZQUIERDA
y = MPII*d; % VECTOR SOLUCION DE DIMENSION (2,1)
Ejemplo 2.32
Resolver el siguiente sistema (mas incognitas que ecuaciones):
(5 − j)x1 + (2 + 3j)x2 + (3 − j)x3 + (−1 + 4j)x4 + (−6 + j)x5 = 2 − 9j
4jx1 − 2x2 + (3 + 5j)x3 − 7jx4 + (8 − 2j)x5 = 4 − j
(6 − j)x1 + (7 − j)x2 + (8 − 3j)x3 + (3 − j)x4 + (1 + 4j)x5 = 3 + j
Solucion: Ver el programa miqe.m.
% miqe.m SISTEMA DE ECUACIONES: MAS INCOGNITAS QUE ECUACIONES
clear all; close all; clc;
A = [5-j 2+3j 3-j -1+4j -6+j
4j -2 3+5j -7j 8-2j
6-j 7-j 8-3j 3-j 1+4j];
B = [2-9j;4-j;3+j]; X = A\B;

34 Sistemas Continuos
Ejemplo 2.33
Resolver el siguiente sistema (mas ecuaciones que incognitas):
(5 − j)x1 + (2 + 3j)x2 + (3 − j)x3 = 2 − 9j
4jx1 − 2x2 + (3 + 5j)x3 = 4 − j
(6 − j)x1 + (7 − j)x2 + (8 − 3j)x3 = 3 + j
(−1 + 4j)x1 + (−6 + j)x2 + (3 − j)x3 = −3 + 7j
−7jx1 + (8 − 2j)x2 + (1 + 4j)x3 = −9
Solucion: Ejecutar el programa meqi.m.
% meqi.m SISTEMA DE ECUACIONES: MAS ECUACIONES QUE INCOGNITAS
clear all; close all; clc;
A = [5-j 2+3j 3-j
4j -2 3+5j
6-j 7-j 8-3j
-1+4j -6+j 3-j
-7j 8-2j 1+4j];
B = [2-9j;4-j;3+j;-3+7j;-9]; X = A\B;
2.2.5. Diagonalizacion de Matrices y Formas Canonicas
Diagonalizacion de Matrices
Si A es una matriz de orden n que posee n eigenvalores distintos λi, entonces sumatriz de eigenvectores E = [e1 . . . en] es unitaria porque: EH = E−1. Sea Λ unamatriz diagonal formada con los eigenvalores de A. Entonces se cumple:
E−1AE = Λ =
λ1 0 . . . 00 λ2 . . . 0...
......
0 0 . . . λn
(2.25)
El proceso de diagonalizacion arriba mencionado permite transformar un sistemadescrito por la denominada ecuacion de estado (seccion 2.3) :
dx
dt= x = Ax + Bu
en otro sistema descrito por la ecuacion:
dx∗
dt= x∗ = A∗x∗ + B∗u
donde: x = Ex∗ es una transformacion lineal, A∗ = E−1AE = Λ y B∗ = E−1B.Esta transformacion se denomina canonica.
Por otro lado, si A es una matriz de orden n de rango completo que posee eingen-valores repetidos, entonces A se puede diagonalizar mediante la relacion E−1AE = Λ.Sin embargo, la matriz de eigenvectores E no es unitaria (EH 6= E−1).

2.3 Variables de Estado 35
Ejemplo 2.34
Hallar la transformacion canonica del siguiente sistema:
x = Ax + Bu =
[2 0−1 1
]x +
[1−1
]u
Solucion: Ejecutar el programa trancan.m para obtener la siguiente transformacioncanonica:
dx∗
dt= x∗ = A∗x∗ + B∗u
[x∗
1
x∗2
]=
[1 00 2
] [x∗
1
x∗2
]+
[0√2
]u
% trancan.m TRANSFORMACION CANONICA
clear all; close all; clc;
A = [2 0;-1 1]; B = [1;-1];
[E,D]=eig(A); % E=[e1 e2]: MATRIZ DE EIGENVECTORES
% EIGENVALORES: D = diag(1, 2)
Aast=inv(E)*A*E; Bast=inv(E)*B; % Aast=[1 0;0 2]; Bast=[0;1.4142;
Ejemplo 2.35
En el programa siguiente se diagonalizan varias matrices de rango completo.
% diagmat.m DIAGONALIZACION DE MATRICES DE RANGO COMPLETO
clear all; close all; clc;
A1 = [2 2 -1;2 3 0;-1 0 2]; n1 = 3; % rank(A1) = 3 (RANGO COMPLETO)
[E1,D1] = eig(A1); DD1=inv(E1)*A1*E1;
% D1=DD1=diag(4.7093,2.1939,0.0968), RAICES NO REPETIDAS => inv(E1)=E1’
A2 = [-2 -1 -1 -1 2;1 3 1 1 -1;-1 -4 -2 -1 1;-1 -4 -1 -2 1;...
-2 -2 -2 -2 3]; n2 = 5; % rank(A2) = 5 (RANGO COMPLETO)
[E2,D2] = eig(A2); DD2=inv(E2)*A2*E2;
% D2 = DD2 = diag(-1,1.5+0.866i,1.5-0.866i,-1,-1)
% DOS RAICES REPETIDAS => inv(E2) ~= E2’
A3 = [-2 3 3 -1 -6 -2;1 0 -1 0 2 1;1 -2 0 1 2 0;1 1 -1 -1 2 1;...
1 -2 -1 1 3 1;1 0 -1 0 2 0]; n3 = 6; % rank(A3)=6 (RANGO COMPLETO)
[E3,D3] = eig(A3); DD3=inv(E3)*A3*E3;
% D3 = diag(-1,-1,1,1,1,-1), TRES RAICES REPETIDAS => inv(E3) ~= E3’
2.3. Variables de Estado
2.3.1. Ejemplo de Introduccion
El siguiente ejemplo sirve para introducir el concepto de variable de estado. LaFig. 2.5 muestra el sistema tanque con agua, donde el volumen de agua acumuladose modela como:
Sdh
dt= Sh = qi − qo h =
dh
dt(2.26)
donde S es la seccion uniforme del tanque, h es el nivel del liquido, q1 es el flujo deentrada y qo es el flujo de salida. Considerando que el flujo de salida qo es laminar:
qo =h
Rh(2.27)

36 Sistemas Continuos
!!!"""
#$#
%%%%%%&&&&&&
o
i
h
q
A
q
Sensor de presión
Fig. 2.5: Sistema tanque con agua.
donde Rh es la resistencia hidraulica, la cual se calcula de la relacion:
Rh =H
Q(2.28)
donde H y Q son los valores estacionarios de h y qo, respectivamente. Despejandoh de (2.26) se obtiene la ecuacion de estado del sistema, la cual es una ecuaciondiferencial de primer orden de la forma:
h = − 1
SRhh +
1
Sqi x = A x + B u (2.29)
donde x = h es la variable de estado del sistema, u = qi es la variable de entrada,A = − 1
SRhes la matriz de estado del sistema (en este caso una matriz de orden uno)
y B = 1S es la matriz de distribucion de orden uno. La ecuacion de salida del proceso
toma la forma:y = Cx = [1]x (2.30)
donde y es la salida y C es la matriz de salida. Sabiendo que L[ ] es el operador deLaplace, entonces: L[u] = U(s), L[x] = X(s) = Y (s), L[qi] = Qi(s) y L[x] = L[y] =s[Y (s) − y(0)], la FT del sistema con y(0) = 0 resulta de (2.29):
Y (s)
Qi(s)=
Rh
SRhs + 1(2.31)
donde el producto SRh es la constante de tiempo del sistema nivel. Por consiguiente,la FT y las ecuaciones de estado y de salida de un determinado sistema SISO (deuna entrada y una salida), son dos formas de describir la dinamica del sistema. Sinembargo, la representacion en el espacio de estado (variables de estado mas ecuacionesde estado y de salida), es general porque se puede aplicar tambien a sistemas nolineales como se vera oportunamente. En cambio, la FT solo es aplicable a sistemaslineales.
Para sistemas MIMO lineales y con parametros invariantes con el tiempo, lasecuaciones de estado y de salida toman la forma:
x = Ax + Bu y = Cx + Du (2.32)

2.3 Variables de Estado 37
donde los ordenes de los vectores y matrices se ilustran en la siguiente relacion:
xn×1 = An×nxn×1 + Bn×mum×1 yp×1 = Cp×nxn×1 + Dp×mum×1
2.3.2. Definicion de Variables de Estado
El vector de estado x = [x1 . . . xn]T de un sistema (donde el superındice T indicatranspuesta) es el mınimo conjunto de variables, las variables de estado x1 . . . xn, lascuales contienen informacion suficiente acerca de la historia pasada del sistema. Estainformacion permite computar todos los futuros estados del sistema, asumiendo porsupuesto, que todas las futuras entradas u son tambien conocidas, como del mismomodo lo son las ecuaciones dinamicas que describen dicho sistema. El numero n devariables de estado (el numero de ecuaciones diferenciales de primer orden) define elorden o la dimension del sistema.
El espacio de estado es el espacio n-dimensional de todos los estados. Cuando elsistema es de orden n = 2, el espacio de estado es conocido como el plano de fase concoordenadas x1 y x2. Los puntos de equilibrio o puntos singulares en el espacio deestado de un sistema no forzado; es decir, cuando u = 0, se definen como los puntosen donde los estados del sistema permanecen por siempre. Esto implica, en un casogeneral, resolver la ecuacion x = 0 cuando u = 0. Para sistemas lineales, el punto deequilibrio es siempre el origen 0 porque x = Ax = 0 implica que xe = 0, donde elsuperındice e indica equilibrio.
Ejemplo 2.36
La Fig. 2.6 muestra un sistema masa–resorte compuesto por una masa M unida aun resorte de constante K. Determinar analıtica y graficamente su plano de fasemostrando las correspondientes trayectorias de estado y sus puntos de equilibrio.Notar que el sistema masa–resorte es no forzado porque no existe fuerza exterioralguna actuando sobre el mismo.
z0
K = 1
M = 1
z
Fig. 2.6: Sistema mecanico masa–resorte.
Solucion: El sistema masa–resorte esta gobernado por la siguiente ecuacion diferen-cial lineal de segundo orden:
Mz + Kz = 0 (2.33)
Como el sistema es de orden dos, seleccionemos como variables de estado x1 = z yx2 = z. Este modelo dinamico con M = K = 1 produce dos ecuaciones de estado yuna ecuacion de salida:
x1 = x2 x2 = −x1 y = x1

38 Sistemas Continuos
Por consiguiente, las ecuaciones de estado y salida del sistema masa–resorte son:
x = Ax y = Cx
x =
[x1
x2
]x =
[x1
x2
]A =
[0 1−1 0
]C =
[1 0
]
Asumamos que estiramos el resorte hasta que M se encuentre en la posicion inicialz0. Luego soltamos el resorte, lo cual produce un movimiento oscilatorio que puedemodelarse como z(t) = z0cos t. Es facil comprobar que la solucion z(t) = z0cos tverifica el modelo dinamico dado en (2.33). Usando las variables de estado definidasanteriormente resulta:
x1(t) = z0cos t x2(t) = −z0sen t
Elevando al cuadrado y sumando se obtiene:
x21 + x2
2 = z20(cos
2t + sen2t) = z20
La ultima ecuacion representa un cırculo de radio z0. Por consiguiente, las trayectoriasde estado en el plano de fase x1 versus x2 son cırculos cuyos radios dependen de laposicion inicial de reposo z0. tales trayectorias se muestran en la Fig. 2.7. Para obtenerdichas trayectorias de fase, ejecutar el programa pfl.m.
Los eigenvalores del sistema masa–resorte se determinan de:
det(λI − A) = det
[λ 1−1 λ
]= λ2 + 1 = 0
Por lo tanto: λ1 = i, λ2 = −i, ambas raıces imaginarias, lo cual nos informa delcaracter oscilante de la respuesta del sistema, tal como se discute en la siguienteseccion. El unico punto de equilibrio xe = 0 del sistema se determina de:
xe = Axe = 0 xe =
[xe
1
xe2
]=
[00
]
% C2pfl.m PLANO DE FASE EN UN SISTEMA LINEAL
clear all; close all; clc;
g = inline(’[x(2);-x(1)]’,’t’,’x’); % MODELO MATEMATICO
vectfield(g,-1:0.2:1,-1:0.2:1) % RANGOS DE LOS EJES HORIZONTAL Y VERTICAL
hold on
for x20=-1:0.2:1 % SIMULACION PARA ESTAS CONDICIONES INICIALES DE y(2)
[ts,xs]=ode45(g,[0,10],[0;x20]); % [0,10]: SIMULACION DE 0 A 10 s
plot(xs(:,1),xs(:,2)); grid;
end
hold off, ylabel(’x2(t)’), xlabel(’x1(t)’),
title(’PLANO DE FASE x2(t) VS x1(t)’), print -deps -f C2pfl
2.3.3. Matriz de Transferencia y Estabilidad
Las ecuaciones de estado y de salida multivariables de un Sistema Lineal e Invari-ante con el Tiempo (SLIT) sujeto a los vectores de disturbio v en los estados y w enlas salidas, los cuales se asumen conocidos, se representan como:
x = Ax + Bu + Ev
y = Cx + Du + Fw (2.34)

2.3 Variables de Estado 39
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
POSICIÓN x1
VE
LOC
IDA
D x
2
PLANO DE FASE x1 VS x2
Fig. 2.7: Plano de fase mostrando las trayectorias de estado (Ejemplo 2.36).
Donde E y F son matrices disturbio tambien conocidas. El sistema es invariantecon el tiempo porque todas sus matrices son constantes. Si v y/o w fueran vectoresestimados o estadısticos, entonces el SLIT en cuestion serıa estocastico. El sistemaSLIT libre de disturbios se determina haciendo v = w = 0 en (2.34):
x = Ax + Bu
y = Cx + Du (2.35)
La matriz de transferencia (MT) del sistema SLIT se halla aplicando la transformadade Laplace en (2.35) con x(0) = y(0) = 0 (condiciones iniciales nulas):
sX(s) = AX(s) + BU(s)
Y(s) = CX(s) + DU(s) (2.36)
Despejamos X(s) de la primera relacion de (2.36) y la reemplazamos en la segundarelacion. El resultado es:
Y(s) = [C(sI − A)−1B + D]U(s) = G(s)u(s) (2.37)
donde s es la variable laplaciana, I es la matriz identidad y G(s) es la MT:
G(s) = C(sI − A)−1B + D
Ejemplo 2.37
Determine la MT del sistema siguiente, empleando matematica simbolica:
x1 = −x1 + x2 + 2u1 − u2 x2 = 2x1 − 3x2 + u1 − 2u2
y1 = x1 − 5u2 y2 = −x2 − 3u1

40 Sistemas Continuos
Solucion: Las ecuaciones de estado y de salida correspondientes son:
x = Ax + Bu y = Cx + Du
x =
[x1
x2
]; y =
[y1
y2
]; u =
[u1
u2
]
A =
[−1 12 −3
]; B =
[2 −11 −2
]; C =
[1 00 −1
]; D =
[0 −5−3 0
]
El programa mtrans.m determina la MT pedida. El resultado es:
G(s) = C(sI − A)−1B + D =
2s+7s2+4s+1
− 5s2+21s+10s2+4s+1
− 3s2+13s+8s2+4s+1
2s+4s2+4s+1
% mtransf.m CALCULO DE LA MATRIZ DE TRANSFERENCIA
clear all; close all; clc;
syms s;
A=[-1 1;2 -3]; B=[2 -1;1 -2]; C=[1 0;0 -1]; D=[0 -5;-3 0]; I = [1 0;0 1];
G = C*inv(s*I-A)*B + D; pretty(simplify(G))
Estabilidad
Cuando las senales y y u son unidimensionales, la ecuacion (2.37) se convierte enla FT del sistema SLIT y se puede representar como la relacion entre dos polinomiosA(s) y B(s) como sigue:
y(s)
u(s)= G(s) = [C(sI − A)−1B + D] =
B(s)
A(s)(2.38)
En general, la ecuacion caracterıstica del sistema SLIT (ecuacion (2.35)) se ob-tiene de:
A(s) = det(sI − A) = 0 (2.39)
Las raıces de (2.39) son los eigenvalores de la matriz de estado A, tal como se trato en(2.23). Los eigenvalores de un sistema SLIT determinan la estabilidad del sistemaalrededor de un punto de equilibrio xe en el espacio de estado como sigue:
El sistema SLIT no forzado x = Ax (ecuacion (2.35) con u = 0 es estable, siempreque todos sus eigenvalores (raıces de (2.39)) posean parte real negativa. Cuando almenos uno de tales eigenvalores posea parte real positiva o cero, entonces el sistemaes inestable.
Notar que todas las funciones de transferencia de la matriz G del ejemplo 2.37poseen un mismo denominador comun: el polinomio A(s) = s2+4s+1. Este polinomioes tambien la ecuacion caracterıstica del sistema multivariable, siendo sus eigenvaloress1 = –3.7321 y s2 = –0.2679. Por consiguiente, tal sistema es estable.
El sistema no forzado x = Ax posee un solo punto de equilibrio: el origen, debidoa que la solucion de x = Ax = 0 es xe = 0. Por consiguiente, un SLIT no forzadoes estable, cuando el estado x del sistema tiende al estado de equilibrio xe = 0

2.3 Variables de Estado 41
para cualquier estado inicial finito x(t0), donde t0 es el tiempo inicial. Por ejemplo,el sistema de primer orden x = a x donde a > 0, es inestable porque su solucionx(t) = x(0)eat no tiende al estado de equilibrio xe = 0 cuando t → ∞ para cualquierestado inicial x(0).
Tipos de Puntos Singulares en SLITs de 2do Orden
Un SLIT de orden dos no forzado se describe mediante la siguiente ecuacionmatricial:
x =
[x1
x2
]= Ax =
[a11 a12
a21 a22
] [x1
x2
]
Para este sistema, el unico punto singular o de equilibrio es xe = 0 (el origen). Losdos eigenvalores λ1 y λ2 de la matriz de estado A se determinan de su ecuacioncaracterıstica: det(λI − A) = 0. Dependiendo de la ubicacion de los eigenvaloresλ1 = σ1 + jω1 y λ2 = σ2 + jω2 en el plano σ versus jω, el punto de equilibriocorrespondiente presenta ciertas caracterısticas, tal como se ilustra en la Fig. 2.8, endonde los puntos negros sobre los graficos jω versus σ representan tales eigenvalores.
Por ejemplo, si λ1 < 0 y λ2 > 0 (caso (c)), las trayectorias en el plano de faseforman una figura denominada silla de montar. El punto singular silla de montar esinestable debido a la presencia del eigenvalor positivo. El caso (f), analizado tambienen el ejemplo 2.36, corresponde a un sistema oscilante porque los eigenvalores sonimaginarios puros. Las trayectorias de estado en este caso forman un punto centro.
2.3.4. Controlabilidad y Observabilidad
Controlabilidad Completa
Se dice que un SLIT continuo es controlable si es que existe un vector u(t) deorden m realizable y capaz de trasladar el estado x(t) de orden n del sistema, desde unestado inicial x(t0) hacia cualquier estado final x(tN ) en un tiempo finito tN . Si todoslos estados son controlables, se dice que el sistema es completamente controlable oque posee controlabilidad completa.
Sin demostracion se establece que en general, para que el sistema x = Ax + Busea completamente controlable, la siguiente matriz M de orden n × nm:
M =[
B AB · · · An−1B]
(2.40)
denominada matriz de controlabilidad, debe ser de rango n. Para ahondar un pocoen el tema de controlabilidad, a continuacion se analiza un caso especial.
Caso Especial: Eigenvalores de A no se Repiten
Si los eigenvalores de A son distintos, entonces reemplazando la transformacionlineal x = Ex∗ en x = Ax + Bu, donde E es la matriz de vectores propios (versubseccion 2.2.5), y despejando x∗ se obtiene:
x∗ = E−1AEx∗ + E−1Bu = Λx∗ + B∗u (2.41)

42 Sistemas Continuos
1x
2x 2x
1x
1x
1x
2x
2x
2x
2x
1x
1x
jω
jω
jω
jω
jω
jω
1λ λ 2
1λ λ 2
1λ
λ 2
1λ λ 2
1λ
λ 2
1λ
λ 2
σ
σ
σ σ
σ
σ
(a) (b)
(d)(c)
(e)(f)
Fig. 2.8: Tipos de puntos singulares en un sistema lineal de segundo orden: (a) no-do estable, (b) nodo inestable, (c) punto silla de montar, (d) foco estable, (e) focoinestable, (f) punto centro.
x∗1
x∗2...
x∗n
=
λ1 0λ2
. . .
0 λn
x∗1
x∗2...
x∗n
+
b∗11 b∗12 · · · b∗1m
b∗21 b∗22 · · · b∗2m...
......
...b∗n1 b∗n2 · · · b∗nm
u1
u2...
um
De la ecuacion (2.41) podemos aseverar que para controlabilidad completa, ningunafila de B∗ = E−1B debe de ser nula. Si por ejemplo, la variable de estado x2 (la cualesta asociada a x∗
2 y al eigenvalor λ2) es no controlable, entonces la segunda fila deB∗ tiene que ser nula. Si este es el caso, de la ecuacion (2.41) se obtiene:
x∗2 = λ2x
∗2 + 0u1 + 0u2 + · · · + 0um
de donde claramente se observa que ninguna fuerza de control esta actuando sobrela variable x∗
2.
Controlabilidad Completa a la Salida
El sistema SLIT descrito en (2.44) con dimensiones Ann, Bnm, Cpn y Dpm escompletamente controlable en la salida si el rango de la siguiente matriz de ordenp × (n + 1)m iguala al orden p del vector de salida y del sistema:
[CB CAB CA2B · · · CAn−1B D] (2.42)

2.3 Variables de Estado 43
Observar que (2.42) requiere la presencia del termino Du en la ecuacion de salidadada en (2.35).
Ejemplo 2.38
En el programa cont1.m se determina la controlabilidad completa y de la salida deun SLIT con ecuacion de estado x = Ax + Bu y ecuacion de salida y = Cx + Du.
% cont1.m CONTROLABILIDAD COMPLETA DE UN SLIT
clear all; close all;clc;
A = [2 2 -1;2 3 0;-1 0 2]; B = [0 2;-1 0;2 1];
C = [1 0 1;-2 3 0]; D = [1 -1;0 3]; % n = 3; p = 2;
M = ctrb(A,B); % M = [A A*B A^2*B]: MATRIZ DE CONTROLABILIDAD
rankM = rank(M); % rankM = 3 = n => SISTEMA COMPLETAMENTE CONTROLABLE
CS = [C*B C*A*B C*A^2*B D]; rankCS = rank(CS);
% rankCS = p = 2 => SISTEMA COMPLETAMENTE CONTROLABLE A LA SALIDA
Observabilidad Completa
Un sistema SLIT es completamente observable si algun estado x(t), incluyendo elestado inicial x(t0), se puede determinar partiendo de la observacion de la salida y(t)en un tiempo finito t0 ≤ t ≤ t1. La observabilidad completa en un sistema es de sumaimportancia porque permite reconstruir las variables de estado no medibles partiendodel vector medible y(t). Sin demostracion se establece la condicion de estabilidadcompleta. Para que un sistema sea completamente observable, es necesario que elrango de la denominada matriz de observabilidad N de dimension np × p :
N =
CCA
...CAn−1
=
[CH AHCH · · · (AH)n−1CH
]H(2.43)
posea rango n (rango completo). En (2.43), el superındice H indica operacion hermi-tiana. Se sabe que si todas las matrices son reales, entonces la operacion hermitianase reemplaza por la opercion transpuesta.
Si existe una transformacion lineal x = Ex∗ de modo tal que E−1AE = Λ, dondeΛ es la matriz diagonal cuyos elementos λi son los eigenvalores de A, entonces (??)toma la forma:
x∗ = E−1AEx∗ = Λx∗ x∗ = eΛtx∗(t0)
Luego:
y = CEx∗ = CEeΛtx∗(t0) = CE
eλ1t 0eλ2t
. . .
0 eλnt
x∗1(t0)
x∗2(t0)...
x∗n(t0)
Entonces, para que el sistema SLIT sea completamente observable, ninguna de lascolumnas de la matriz CE de orden p×n debe de ser nula. Si alguna columna i fueranula, entonces no se podrıa reconstruir completamente el vector de estado x, lo quese contrapone a la definicion de observabilidad completa.

44 Sistemas Continuos
Ejemplo 2.39
En el programa observ1.m se determina la observabilidad completa de varios SLITs.
% observ1.m OBSERVABILIDAD COMPLETA DE SLITs
clear all; close all; clc;
A1 = [2 0 0;0 2 0;0 3 1]; B1 = [0 1;1 0;0 1]; C1 = [1 2 1;2 0 3]; n1 = 3;
[E1,D1] = eig(A1); DD1 = inv(E1)*A1*E1; % D1 = diag(2,1,2)
N1 = obsv(A1,C1); % RETORNA MATRIZ DE OBSERVABILIDAD [C1; C1*A1; C1*A1^2]
rankN1=rank(N1); % rankN1=3=n1 => SISTEMA COMPLETAMENTE OBSERVABLE
A2 = [-1 1 -1;0 1 -4;0 1 -3]; B2 = [0 2 1]; C2 = [0 1 -1]; n2 = 3;
[E2,D2] = eig(A2); DD2 = inv(E2)*A2*E2; % D2 = diag(-1,-1,-1)
N2 = obsv(A2,C2); % RETORNA MATRIZ DE OBSERVABILIDAD [C2; C2*A2; C2*A2^2]
rankN2=rank(N2); % rankN2=2<n2 => SISTEMA NO ES COMPLETAMENTE OBSERVABLE
A3 = [2 2 -1;2 3 0;-1 0 2]; B3 = [0 1;1 0;0 1]; C3 = [1 2 1;2 0 3]; n3=3;
[E3,D3] = eig(A3); DD3 = inv(E3)*A3*E3; % D3 = diag(0.0968,2.1939,4.7093)
N3 = obsv(A3,C3); % RETORNA MATRIZ DE OBSERVABILIDAD [C3; C3*A3; C3*A3^2]
rankN3=rank(N3); % rankN3=3=n3 => SISTEMA COMPLETAMENTE OBSERVABLE
2.3.5. Solucion de la Ecuacion de Estado de SLITs Continuos
En la subseccion 2.3.3, ecuacion (2.35), vimos que la dinamica linealizada de unsistema (sin la presencia de disturbios) se representa en el espacio de estado mediantesus ecuaciones de estado y de salida:
x = Ax + Bu; y = Cx + Du (2.44)
La solucion de la ecuacion de estado anterior, dado un estado inicial x(t0), es:
x(t) = eA(t−t0)x(t0) +
∫ t
t0
eA(t−τ)Bu(τ)dτ
= Φ(t − t0)x(t0) +
∫ t
t0
Φ(t − τ)Bu(τ)dτ (2.45)
donde:
Φ(t−t0) = eA(t−t0) =∞∑
ν=0
Aν(t − t0)ν
ν!= I+A(t−t0)+
A2(t − t0)2
2!+
A3(t − t0)3
3!+· · ·
(2.46)es la matriz de transicion o exponencial. La derivada total de eA(t−t0) resulta:
deA(t−t0)
dt= A + A2(t − to) +
A3(t − to)2
2!+ · · ·
= A
[I + A(t − t0) +
A2(t − t0)2
2!+ + · · ·
]
= AeA(t−t0) = eA(t−t0)A (2.47)
Derivando ahora (2.45) con respecto al tiempo t se obtiene:
x = AeA(t−t0)x(t0) +d
dt
[eAt
∫ t
t0
e−AτBu(τ)dτ
]
= AeA(t−t0)x(t0) + AeAt
∫ t
t0
e−AτBu(τ)dτ + eAte−AtBu = Ax + Bu

2.3 Variables de Estado 45
De esta forma se demuestra que (2.45) es la solucion de la ecuacion de estado (2.44).La representacion de la ecuacion de estado en el dominio laplaciano toma la forma:
sx(s) − x(t0) = Ax(s) + Bu(s)
x(s) = (sI − A)−1x(t0) + (sI − A)−1Bu(s)
= Φ(s)x(t0) + Φ(s)Bu(s) (2.48)
y(s) = Cx(s) + Du(s) = C(sI − A)−1x(t0) + [C(sI − A)−1B + D]u(s) (2.49)
Comparando (2.48) con (2.45) podemos afirmar que:
Φ(t − t0) = eA(t−t0) = L−1[(sI − A)−1] (2.50)
La matriz Φ(t− t0) se denomina la matriz de transicion. Para incluir el tiempo inicialt0, las integraciones en L−1[(sI − A)−1] se deben de hacer de t0 a t. La matriz detransferencia definida en (2.37) tambien se obtiene haciendo x(t0) = 0 en (2.49).
Ejemplo 2.40
Graficar la respuesta x(t) del sistema: x = −2x + 5u con x(0) = 3. La entrada u(t)tiene la forma mostrada en la Fig. 2.9.
0 1 2 3 4
1 u(t)
t
Fig. 2.9: Entrada u(t) para el ejemplo 2.40.
Solucion: Emplearemos la solucion dada en (2.45) con A = −2 y B = 5. Para0 ≤ t ≤ 1, u(t) = 0, t0 = 0 y x(t0) = 3. Luego:
x(t) = 3e−2t; x(1) = 3e−2
Para 1 ≤ t ≤ 3, u(t) = 3−t2 , t0 = 1 y x(t0) = x(1). Luego:
x(t) = 3e−2e−2(t−1) +
∫ t
1e−2(t−τ) 5
3 − τ
2dτ = 3e−2t +
5
8e−2t
7e2τ − e2ττ
τ=t
τ=1
x(t) = 3e−2t +5
8[7 − t − 6e2(1−t)]; x(3) = 3e−6 +
5
8(4 − 6e−4)
Para t ≥ 3 , u(t) = 0, t0 = 3 y x(t0) = x(3). Luego:
x(t) = x(3)e−2(t−3)
El grafico de x(t), obtenido con el programa C2rpta.m se muestra en la Fig. 2.10.

46 Sistemas Continuos
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
3
RE
SP
UE
STA
x(t)
TIEMPO EN SEGUNDOS
Fig. 2.10: Respuesta x(t) de un SLIT de primer orden a una entrada arbitraria u(t).
% C2rpta.m RESPUESTA DE UN SLIT A UNA ENTRADA ARBITRARIA
clear all; close all; clc;
x_3 = 3*exp(-6)+5*(4-6*exp(-4))/8; k=1; T=10;
for t=0:0.01:T
x(k)=3*exp(-2*t);
if t>1; x(k)= 3*exp(-2*t)+5*(7-t-6*exp(2-2*t))/8; end
if t>3; x(k)= x_3*exp(-2*(t-3)); end
k=k+1;
end
ejex = linspace(0,T,T/0.01); plot(ejex,x(1:T/0.01)); grid
ylabel(’RESPUESTA x(t)’); xlabel(’TIEMPO [s]’); print -deps -f rptarb
Ejemplo 2.41
Dado u(t) = 3e−t, determinar la respuesta de un sistema descrito por las siguientesecuaciones de estado y de salida:
x1 = −7x1 + x2 + 2u; x2 = −12x1 − u y = 3x1 − 4x2 − 2u
Condiciones iniciales: x1(0) = −6, x2(0) = 1. Graficar la respuesta y(t) y compararlacon las respuestas obtenidas mediante discretizacion para los tiempos de muestreo de0.1 s y 0.04 s.
Solucion: Es facil determinar que las ecuaciones de estado y de salida del sistemaposeen la forma x = Ax + Bu y y = Cx + Du respectivamente, donde:
A =
[−7 1−12 0
]; B =
[2−1
]
C =[
3 −4]; D = [−2]; x(0) =
[−61
]

2.3 Variables de Estado 47
Segun la Tabla 2.1: u(s) = L[3e−t] = 3/(s + 1). Luego, x(s) (ecuacion (2.48)) e y(s)(ecuacion (2.49)) toman la forma:
x(s) =
[s + 7 −112 s
]−1 [ −61
]+
[s + 7 −112 s
]−1 [2−1
]u(s)
=1
s2 + 7s + 12
[s 1
−12 s + 7
][−61
]+
[2−1
](3
s + 1
)
=
[ −6s2+s−2(s+1)(s+3)(s+4)
s2+77s−14(s+1)(s+3)(s+4)
]
y(s) = Cx(s) + Du(s) =[
3 −4][ −6s2+s−2
(s+1)(s+3)(s+4)s2+77s−14
(s+1)(s+3)(s+4)
]− 2
(3
s + 1
)
=−22s2 − 305s + 50
(s + 1)(s + 3)(s + 4)− 6
s + 1=
297/6
s + 1+
−767/2
s + 3+
918/3
s + 4
y(t) =297
6e−t +
−767
2e−3t +
918
3e−4t , t ≥ 0
Las respuestas mostradas en la Fig. 2.11 se realizaron con el programa crpta.m. Notarque se emplea la siguiente aproximacion de la derivada:
x ∼= x(k + 1) − x(k)
T= Ax + Bu → x = x + T (Ax + Bu)
donde T es el tiempo de muestreo y k = t/T es el tiempo discreto. Para T ≤ 0.04 s,las respuestas y(t) e y(kT ) practicamente coinciden. Conforme T aumenta (por ejem-plo para T = 0.1 s), la diferencia entre y(t) e y(kT ) es mas notoria, lo cual nos indicaque los sistemas muestreados dependen de T . Se deja como ejercicio resolver esteejemplo usando MATLAB.
% crpta.m COMPARACION DE RESPUESTAS PARA DIFERENTES TIEMPOS DE MUESTREO
clear all; close all; clc;
A = [-7 1;-12 0]; B = [2;-1]; Cc = [3 -4]; Dc = [-2];
x = [-6;1]; T1=0.1; T2=0.04; % CONDICION INICIAL Y TIEMPOS DE MUESTREO
for k = 1:100
u(k) = 3*exp(-k*T1); x = x + T1*(A*x + B*u(k)); y1(k) = Cc*x + Dc*u(k);
end
for k = 1:250
u(k) = 3*exp(-k*T2); x = x + T2*(A*x + B*u(k)); y2(k) = Cc*x + Dc*u(k);
end
t = 0:0.1:10; y = 297*exp(-t)/6 - 767*exp(-3*t)/2 + 918*exp(-4*t)/3;
% GRAFICOS
t=linspace(0,10,101); t1=linspace(0,10,100); t2=linspace(0,10,250);
plot(t,y,t1,y1,’--’,t2,y2,’:’); grid
ylabel(’RESPUESTAS ’); xlabel(’TIEMPO [s]’); print -deps -f crpta
Ejemplo 2.42

48 Sistemas Continuos
0 2 4 6 8 10−50
−40
−30
−20
−10
0
10
20
RE
SP
UE
STA
S
TIEMPO [s]
y(t)
T2 = 0.04 s
T1 = 0.1 s
Fig. 2.11: Respuestas para el ejemplo 2.41.
En el ejemplo anterior sean u1(t) = 3e−t, u2(t) = 2u1(t) y u3(t) = u1(t) + u2(t) ysean las salidas respectivas y1(t), y2(t) e y3(t). El programa C2prosup.m demuestragraficamente (ver figura 2.12) los principios de proporcionalidad: y2(t) = 2y1(t), yde superposicion: y3(t) = y1(t) + y2(t).
% C2prosup.m PRINCIPIOS DE PROPORCIONALIDAD Y SUPERPOSICION
clear all; close all; clc;
A = [-7 1;-12 0]; B = [2;-1]; Cc = [3 -4]; Dc = [-2];
T = 0.04; M = 100; x1 = [0;0]; x2 = x1; x3 = x1;
for k= 1:M
u1(k)=3; x1 = x1 + T*(A*x1 + B*u1(k)); y1(k) = Cc*x1 + Dc*u1(k);
u2(k)=2*u1(k); x2 = x2 + T*(A*x2 + B*u2(k)); y2(k) = Cc*x2 + Dc*u2(k);
u3(k)=u1(k)+u2(k); x3 = x3 + T*(A*x3 + B*u3(k)); y3(k) = Cc*x3 + Dc*u3(k);
end
t=linspace(0,M*T,M); plot(t,y1,t,y2,’--’,t,y3,’:’); grid
ylabel(’RESPUESTAS’), xlabel(’TIEMPO [s]’), print -deps -f C2prosup
Ejemplo 2.43
En el sistema de la Fig. 2.13 ya se han definido las variables de estado xi del sistema,las cuales se han fijado a la salida de cada bloque de primer orden. Para este sistema:(a) Determinar su ecuacion de estado y su ecuacion de salida. (b) Hallar su matrizde transferencia. (c) Determinar si el sistema es estable. (d) Hallar la controlabilidadcompleta, la controlabilidad completa en la salida y la observabilidad completa delsistema. (e) Usar (2.50) para determinar su matriz de transicion con t0 = 0. (f) De-terminar y(t) para x(t0) = 0 usando (2.49). (g) Graficar las respuestas y1(t) e y2(t)a entradas tipo escalon unitario.

2.3 Variables de Estado 49
0 0.5 1 1.5 2 2.5 3 3.5 4−20
−10
0
10
20
30
40
50
60
70
80
RE
SP
UE
STA
S
TIEMPO [s]
y2 = 2y1
y1
y3 = y1 + y2
Fig. 2.12: Respuestas de un sistema lineal a entradas arbitrarias. Observar que y2(t) =2y1(t) (proporcionalidad) e y3(t) = y1(t) + y2(t) (superposicion)
1
4
3
2
5
s + 1
s + 2
s + 3
x
y1
2y
x
x
x
1
2
4
3
x 5
s + 5
s + 4
u 1
u 2
u 3
Fig. 2.13: Sistema del ejemplo 2.43
Solucion: (a) Del diagrama de bloques se puede comprobar que las salidas y1 e y2
poseen las expresiones:
y1 = x2 + x3 + x4 − x5 + u3 y2 = x1 − x2 + x5 + u2 (2.51)
Operando en el bloque que tiene como salida la variable de estado x1, se obtiene:
x1 =1
s + 1(u1 − y1) → (s + 1)x1 = x1 + x1 = u1 − y1
Reemplazando y1 de (2.51) en la ultima expresion, se obtiene:
x1 = −x1 − x2 − x3 − x4 + x5 − u3 (2.52)
Operando del mismo modo con los otros bloques resultan:
(s + 2)x2 = 2(u2 − x2) → x2 = −4x2 + 2u2

50 Sistemas Continuos
(s + 3)x3 = 3(u3 − x5) → x3 = −3x3 − 3x5 + 3u3
(s + 4)x4 = 4(x1 + u2 − x2) → x4 = 4x1 − 4x2 − 4x4 + 4u2
(s + 5)x5 = 5(x2 + u3 − x3 + x3) → x5 = 5x2 − 5x5 + 5x3 (2.53)
Las ecuaciones en (2.52) y (2.53) forman la ecuacion de estado x = Ax+Bu mientrasque las ecuaciones en (2.51) forman la ecuacion de salida y = Cx + Du, tal como semuestra a continuacion.
x1
x2
x3
x4
x5
=
−1 −1 −1 −1 10 −4 0 0 00 0 −3 0 −34 −4 0 −4 00 5 0 0 −5
x1
x2
x3
x4
x5
+
1 0 −10 2 00 0 30 4 00 0 5
u1
u2
u3
[y1
y2
]=
[1 0 1 1 −11 −1 0 0 1
]
x1
x2
x3
x4
x5
+
[0 0 10 1 0
]
u1
u2
u3
La MT G(s) toma la forma (ver archivo va.m):
G(s) =
[G11(s) G12(s) G13(s)G21(s) G22(s) G23(s)
]
G11(s) =s + 8
s2 + 5s + 8G12(s) =
4s4 + 14s3 − 4s2 − 139s − 120
(s2 + 5s + 8)(s2 + 9s + 20)(s + 3)
G13(s) =(s2 + 10s + 24)2
(s + 5)(s + 3)(s2 + 5s + 8)
G21(s) =s + 4
s2 + 5s + 8G22(s) =
s5 + 15s2 + 93s3 + 291s2 + 510s + 480
(s2 + 5s + 8)(s2 + 9s + 20)(s + 3)
G23(s) =4s3 + 30s2 + 91s + 120
(s + 5)(s3 + s2 + 23s + 24)
Los elementos y1(t) e y2(t) del vector de salida y (calculados en va.m) resultan:
y1 =5
2− 13
4e−3t +
17
16e−5t − 5
2e−4t +
51
16e−
52tcos
(√7
2t
)− 111
112
√7e−
52tsen
(√7
2t
)
y2 =1
2− 39
4e−3t +
5
16e−5t − 3
2e−4t +
183
16e−
52tcos
(√7
2t
)− 99
112
√7e−
52tsen
(√7
2t
)
Por otro lado, la Fig. 2.14 muestra las respuestas y1(t) e y2(t) (Out(1) y Out(2) enel grafico) a los escalones u1 = 1, u2 = 1 y u3 = 1 (In(1), In(2) e In(3) en el grafico)obtenidas con el comando step de MATLAB. Ejecutar el archivo va.m.

2.3 Variables de Estado 51
% va.m VARIOS CALCULOS PARA EL EJEMPLO 2.43
clear all; close all; clc;
% (a) ECUACIONES DE ESTADO Y DE SALIDA
A = [-1 -1 -1 -1 1;0 -4 0 0 0;0 0 -3 0 -3;4 -4 0 -4 0;0 5 0 0 -5];
B = [1 0 -1;0 2 0;0 0 3;0 4 0;0 0 5];
C = [1 0 1 1 -1;1 -1 0 0 1]; D = [0 0 1;0 1 0]; I = eye(5); n = 5; p = 2;
syms s;
% (b) MATRIZ DE TRANSFERENCIA
G = C*inv(s*I-A)*B + D; pretty(simplify(G))
% (c) ESTABILIDAD
[E,DD]=eig(A);
% DD = diag(-2.5000+1.3229i, -2.5000-1.3229i, -3.0000, -5.0000, -4.0000)
% SISTEMA ESTABLE PORQUE LA PARTE REAL DE LAS RAICES SON NEGATIVAS
% (d) CONTROLABILIDAD Y OBSERVABILIDAD
M = ctrb(A,B); % MATRIZ DE CONTROLABILIDAD M = [A A*B A^2*B A^3*C A^4*B]
rankM = rank(M); % rankM = 5 = n => SISTEMA COMPLETAMENTE CONTROLABLE
CS = [C*B C*A*B C*A^2*B C*A^3*B C*A^4*B D]; rankCS = rank(CS);
% rankCS = p = 2 => SISTEMA COMPLETAMENTE CONTROLABLE A LA SALIDA
N = obsv(A,C); % MATRIZ DE OBSERVABILIDAD N=[C; C*A; C*A^2; C*A^3; C*A^4]
rankN=rank(N); % rankN=5=n => EL SISTEMA ES COMPLETAMENTE OBSERVABLE
% (e) MATRIZ DE TRANSICION Phi(t)=L^(-1)[(sI-A)^(-1)]
Phi = ilaplace(inv(s*I-A)); pretty(simplify(Phi))
% (f) RESPUESTAS y1(t) e y2(t)
U = [1/s;1/s;1/s]; Y = G*U; y = ilaplace(Y); pretty(simplify(y))
% (g) GRAFICOS DE LAS SALIDAS
step(A,B,C,D), print -deps -f va
2.3.6. Formas Canonicas SISO en el Espacio de Estado
La ecuacion diferencial que describe a un sistema SISO con parametros constantestoma la forma:
dny(t)
dtn+ a1
dn−1y(t)
dtn−1+ · · · + any(t) = b0
dnu(t)
dtn+ b1
dn−1u(t)
dtn−1+ · · · + bnu(t) (2.54)
La FT correspondiente al sistema (2.54) es:
G(s) =y(s)
u(s)=
b0sn + b1s
n−1 + · · · + bn
sn + a1sn−1 + · · · + an=
b0 + b1s−1 + · · · + bns−n
1 + a1s−1 + · · · + ans−n(2.55)
En (2.38) vimos que la FT tambien se puede formular como:
y(s)
u(s)= G(s) = [C(sI − A)−1B + D]
que corresponde al sistema SLIT en el espacio de estado: x = Ax+Bu; y = Cx+Du.Tal sistema posee diversas representaciones notables en el espacio de estado. Dichasrepresentaciones se denominan formas canonicas. La transformacion canonica tratadaen el ejemplo 2.34 es una de ellas. Otras formas canonicas se describen a continuacion.

52 Sistemas Continuos
−1
−0.5
0
0.5
1
1.5From: In(1)
To: O
ut(1
)
0 1 2 30
0.5
1
1.5
To: O
ut(2
)
From: In(2)
0 1 2 3
From: In(3)
0 1 2 3
Step Response
Time (sec)
Am
plitu
de
Fig. 2.14: Respuestas y1(t) e y2(t) a los escalones u1 = 1, u2 = 1 y u3 = 1 (ejemplo2.43)
.
Primera Forma Canonica Controlable:
x =
0 1 0 · · · 00 0 1 · · · 0...
......
...0 0 0 · · · 1
−an −an−1 −an−2 · · · −a1
x1
x2
...xn−1
xn
+
00...01
u
y =[
bn − anb0 bn−1 − an−1b0 · · · b1 − a1b0
]x + b0u (2.56)
Segunda Forma Canonica Controlable:
x =
0 1 0 · · · 00 0 1 · · · 0...
......
...0 0 0 · · · 1
−an −an−1 −an−2 · · · −a1
x1
x2
...xn−1
xn
+
β1
β2
...βn−1
βn
u
y =[
1 0 · · · 0]x + β0u (2.57)
donde: β0 = b0, β1 = b1 − a1β0, β2 = b2 − a1β1 − a2β0, etc. Generalizando:
βn = bn − a1βn−1 − · · · − an−1β1 − anβ0

2.3 Variables de Estado 53
Tercera Forma Canonica Controlable:
x =
−a1 −a2 · · · −an−1 −an
1 0 · · · 0 00 1 · · · 0 0...
......
...0 0 · · · 1 0
x1
x2
...xn−1
xn
+
10...00
u
y =[
b1 − a1b0 b2 − a2b0 · · · bn − anb0
]x + b0u (2.58)
Primera Forma Canonica Observable:
x =
0 0 · · · 0 0 −an
1 0 · · · 0 0 −an−1
......
......
...0 0 · · · 1 0 −a2
0 0 · · · 0 1 −a1
x1
x2
...xn−1
xn
+
bn − anb0
bn−1 − an−1b0
...b2 − a2b0
b1 − a1b0
u
y =[
0 0 · · · 0 1]x + b0u (2.59)
Segunda forma canonica observable:
x =
−a1 1 0 · · · 0 0−a2 0 1 · · · 0 0
......
......
...−an−1 0 0 · · · 0 1−an 0 0 · · · 0 0
x1
x2
...xn−1
xn
+
b1 − a1b0
b2 − a2b0
...bn−1 − an−1b0
bn − anb0
u
y =[
1 0 · · · 0 0 · · ·]x + b0u (2.60)
Forma Canonica Diagonal (eigenvalores no repetidos)
Formulando (2.55) como:
G(s) =y(s)
u(s)=
b0sn + b1s
n−1 + · · · + bn−1s + bn
(s − p1)(s − p2) · · · (s − pn)= b0 +
n∑
i=1
ci
s − pi
donde las raıces pi (los eigenvalores del sistema) son no repetidos, las constantes ci
se pueden hallar en la forma acostumbrada a partir de:
ci = lıms→pi
[(s − pi)G(s)]
Luego, la forma canonica diagonal es:
x1
x2
...xn−1
xn
=
λ1 0 · · · 00 λ2 · · · 0...
......
0 0 · · · λn
x1
x2
...xn
+
11...1
u
y =[
c1 c2 · · · cn
]x + b0u (2.61)

54 Sistemas Continuos
Forma Canonica de Jordan (eigenvalores repetidos)
Describiremos la forma canonica de Jordan con un ejemplo. Supongamos que(2.55) toma la forma:
G(s) =y(s)
u(s)=
b0sn + b1s
n−1 + · · · + bn−1s + bn
(s − p1)3(s − p4)2(s − p6) · · · (s − pn)=
B(s)
A(s)
= b0 +c1
(s − p1)3+
c2
(s − p1)2+
c3
s − p1+
c4
(s − p2)2+
c5
s − p2+
8∑
i=6
ci
s − pi
donde los eigenvalores p1 y p2 se repiten tres y dos veces respectivamente, y el resto,p6, p7 y p8 no lo son. Las constantes b0, ci, i = 1, . . . , 8 y los eigenvalores p1, p2, p6, p7
y p8 se calculan empleando el comando [r,p,k] = residue(B,A) (ver ecuacion (2.5)).La forma canonica de Jordan es (notar la ubicacion de los ceros y unos en el vectorque multiplica a u):
x =
p1 1 0 0 0 0 0 00 p1 1 0 0 0 0 00 0 p1 0 0 0 0 00 0 0 p2 1 0 0 00 0 0 0 p2 0 0 00 0 0 0 0 p6 0 00 0 0 0 0 0 p7 00 0 0 0 0 0 0 p8
x1
x2
x3
x4
x5
x6
x7
x8
+
00101111
u
y =[
c1 c2 c3 c4 c5 c6 c7 c8 c9
]x + b0u (2.62)
y(s)
u(s)= b0 +
c1
(s − p1)3+
c2
(s − p1)2+
c3
s − p1+
c4
(s − p2)2+
c5
s − p2+
8∑
i=6
ci
s − pi(2.63)
Ejemplo 2.44
En el programa C2forca1.m se determinan varias formas canonicas para:
G(s) =1 − 2.8s−1 − 0.65s−2 + 6.8s−3 − 4.25s−4 − 1.3s−5 + 1.2s−6
1 + 1.3s−1 − 1.69s−2 − 0.345s−3 + 0.49s−4 + 0.02s−5 − 0.04s−6
% C2forca1.m FORMAS CANONICAS
clear all; close all; clc;
b0=1; b1=-2.8; b2=-0.65; b3=6.8; b4=-4.25; b5=-1.3; b6=1.2;
a1=1.3; a2=-1.69; a3=-0.345; a4=0.49; a5=0.02; a6=-0.04;
B = [b0 b1 b2 b3 b4 b5 b6]; % B(s): POLINOMIO DEL NUMERADOR
A =[1 a1 a2 a3 a4 a5 a6]; % A(s): POLINOMIO DEL DENOMINADOR
roots(A); % RAICES DE A(s): 0.5, 0.5, 0.5, -0.4, -0.4, -2
% EL SISTEMA ES INESTABLE DEBIDO A LA RAIZ TRIPLE 0.5
% 2DA FORMA CANONICA CONTROLABLE: dx/dt = Acc*x + Bcc*u; y = Ccc*x + Dcc*u
beta0 = b0;
beta1 = b1-a1*beta0;
beta2 = b2-a1*beta1-a2*beta0;
beta3 = b3-a1*beta2-a2*beta1-a3*beta0;

2.3 Variables de Estado 55
beta4 = b4-a1*beta3-a2*beta2-a3*beta1-a4*beta0;
beta5 = b5-a1*beta4-a2*beta3-a3*beta2-a4*beta1-a5*beta0;
beta6 = b6-a1*beta5-a2*beta4-a3*beta3-a4*beta2-a5*beta1-a6*beta0;
Acc = [0 1 0 0 0 0
0 0 1 0 0 0
0 0 0 1 0 0
0 0 0 0 1 0
0 0 0 0 0 1
-a6 -a5 -a4 -a3 -a2 -a1];
Bcc = [beta1;beta2;beta3;beta4;beta5;beta6];
Ccc = [1 0 0 0 0 0]; Dcc =[beta0];
% 1RA FORMA CANONICA OBSERVABLE: dx/dt = Aco*x + Bco*u; y = Coo*x + Doo*u
Aoo = [0 0 0 0 0 -a6
1 0 0 0 0 -a5
0 1 0 0 0 -a4
0 0 1 0 0 -a3
0 0 0 1 0 -a2
0 0 0 0 1 -a1];
Aco = [b6-a6*b0;b5-a5*b0;b4-a4*b0;b3-a3*b0;b2-a2*b0;b1-a1*b0];
Cco = [0 0 0 0 0 1]; Dco=[b0];
% FORMA CANONICA DE JORDAN: dx/dt = Aj*x + Bj*u; y = Cj*x + Dj*u
[c,p,k] = residue(B,A); % EXPANSION EN FRACCIONES PARCIALES
% c = [-1.89 3.6133 -1.0136 0.1111 -5.8233 -0.5323]’;
% p = [-2 0.5 0.5 0.5 -0.4 -0.4]; k = 1;
c1=c(1); c2=c(2); c3=c(3); c4=c(4); c5=c(5); c6=c(6);
p1=p(1); p2=p(2); p2=p(3); p2=p(4); p3=p(5); p3=p(6);
Aj = [p1 0 0 0 0 0
0 p2 1 0 0 0
0 0 p2 1 0 0
0 0 0 p2 0 0
0 0 0 0 p3 1
0 0 0 0 0 p3];
Bj = [1;0;0;1;0;1];
Cj = [c1 c2 c3 c4 c5 c6]; Dj = [k];
Ejemplo 2.45
Conocido el sistema x = Ax+Bu, y = Cx+Du, determinar la ecuacion de estado yla ecuacion de salida en su forma canonica de Jordan: x = Ajx+Bju, y = Cjx+Dju.Demuestre que las matrices A y Aj poseen los mismos eigenvalores y que ambas re-presentaciones de estado generan la misma funcion de transferencia.
Solucion: El siguiente programa resuelve las preguntas planteadas.
% C2forca2.m FORMA CANONICA DE JORDAN DE dx/dt + A*x + B*u; y = C*x + D*u
clear all; close all; clc;
A = [0 1 0 3;0 -1 1 1;0 0 0 1;0 0 -1 -2];
B = [1;0;-4;0]; C = [1 0 0 0]; D = [-2];
[num,den] = ss2tf(A,B,C,D);
eigA = eig(A); % EIGENVALORES DE A: eigA = [-1, -1, -1, 0]
[c,p,k] = residue(num,den); % EXPANSION EN FRACCIONES
% c = [-8 -8 0 9]’; p = [-1 -1 -1 0]; k = -2;
c1=c(1); c2=c(2); c3=c(3); c4=c(4); p1=p(1); p2=p(2); p3=p(3); p4=p(4);

56 Sistemas Continuos
% dx/dt = Aj*x + Bj*u; y = Cj*x + Dj*u
Aj = [p1 0 0 0;0 p1 1 0;0 0 p1 0;0 0 0 p2];
Bj = [0;1;1;1]; Cj = [c1 c2 c3 c4]; Dj = [k];
[numj,denj] = ss2tf(Aj,Bj,Cj,Dj); % SE VERIFICA: num=numj, den=denj
eigAj = eig(Aj); % EIGENVALORES DE Aj Y A SON IGUALES: [-1, -1, -1, 0]
2.4. Discretizacion Directa
Discretizacion de la Integral
Es bastante util discretizar directamente modelos dinamicos que contengan inte-grales y derivadas. La integral de una curva e(t); es decir, el area debajo de dichacurva, se puede aproximar empleando una sumatoria de rectangulos de la formaT e(iT ) (Fig. 2.15(a)) o trapezoides de la forma:
Te(Ti) + e(Ti + T )
2
tal como se observa en la Fig. 2.15(b), donde T es el tiempo de muestreo. Los si-guientes ejemplos ilustran tal aproximaciones.
T t=iT
e(iT)e(t) e(iT+T)
T t=iT
e(iT)e(t)
(a) (b)
Fig. 2.15: (a) Aproximacion del area bajo la curva e(t) mediante rectangulos. (b)Mediante trapezoides.
Ejemplo 2.46
Determinar la ecuacion de diferencias de la siguiente integral usando tanto aproxi-macion rectangular como trapezoidal.
u(t) =
∫ t
0e(τ)dτ
Solucion: Si empleamos sumatoria de rectangulos para aproximar el area debajo dela curva e(t), se obtiene:
u(kT ) ≈k∑
i=0
Te(iT ) = T
k∑
i=0
e(iT ) = T
k−1∑
i=0
e(iT ) + Te(kT ) = u(kT − T ) + Te(kT )
u(kT ) − u(kT − T ) = Te(kT )
u(k) = u(k − 1) + Te(k) (2.64)

2.4 Discretizacion Directa 57
donde k = t/T es el tiempo discreto. En la expresion (2.64), denotada como laecuacion discreta de la integral, hemos omitido en el argumento su dependencia conel tiempo de muestreo T , ya que todos los terminos se discretizan empleando dichotiempo. Para el otro caso, empleamos sumatoria de trapecios para aproximar el areadebajo de la curva e(t):
u(kT ) ≈ Tk∑
i=1
e(iT − T ) + e(iT )
2= T
k−1∑
i=0
e(iT − T ) + e(iT )
2+ T
e(kT − T ) + e(kT )
2
= u(kT − T ) + Te(kT − T ) + e(kT )
2
u(kT ) − u(kT − T ) =T
2[e(kT − T ) + e(kT )]
u(k) = u(k − 1) +T
2[e(k − 1) + e(k)] (2.65)
Discretizacion de la Derivada
Terminos que contengan derivadas pueden discretizarse empleando diferenciaspor atraso:
de(t)
dt= e(t) ≈ ∆e(kT )
T=
e(kT ) − e(kT − T )
T=
e(k) − e(k − 1)
Tde(t)
dt= e(t) ≈ ∆e(kT )
T=
e(t) − e(t − T )
T=
∆e(kT ) − ∆e(kT − T )
T 2
=e(k) − e(k − 1) − [e(k − 1) − e(k − 2)]
T 2=
e(k) − 2e(k − 1) + e(k − 2)
T 2
... (2.66)
Si la discretizacion de la derivada se realiza por adelanto, entonces las diferencias sonde la forma:
de(t)
dt= e(t) ≈ ∆e(kT )
T=
e(kT + T ) − e(kT )
T=
e(k + 1) − e(k)
Tde(t)
dt= e(t) ≈ ∆e(kT )
T=
e(t + T ) − e(t)
T=
∆e(kT + T ) − ∆e(kT )
T 2
=e(k + 1) − e(k) − [e(k) − e(k − 1)]
T 2=
e(k + 1) − 2e(k) + e(k − 1)]
T 2
... (2.67)
Ejemplo 2.47
El controlador PID se emplea en mas del 90 % de los circuitos de control existentes enla industria. Este controlador se formula en la ecuacion (2.68), donde Kc es la gananciaproporcional, Ti es el tiempo integral y Td es el tiempo derivativo. Determinar laecuacion de diferencias de dicho controlador. En un primer caso emplear aproximacionrectangular y luego usar aproximacion trapezoidal.
u(t) = Kc
[e(t) +
1
TI
∫ t
0e(t)dt + TD
de(t)
dt
](2.68)

58 Sistemas Continuos
Solucion: Empleando las relaciones (2.64) y (2.66) en (2.68) se obtiene:
u(k) = Kc
e(k) +
T
TI
k∑
i=0
e(i) +TD
T[e(k) − e(k − 1)]
u(k − 1) = Kc
e(k − 1) +
T
TI
k−1∑
i=0
e(i) +TD
T[e(k − 1) − e(k − 2)]
Teniendo en cuenta que:∑k
i=0 e(i) =∑k−1
i=0 e(i) + e(k), restamos las expresionesanteriores y despejamos u(k) para obtener la siguiente ecuacion de diferencias delcontrolador PID:
u(k) = u(k − 1) + q0e(k) + q1e(k − 1) + q2e(k − 2) (2.69)
donde:
q0 = Kc
[1 +
T
Ti+
TD
T
]; q1 = −Kc
[1 + 2
TD
T
]; q2 = Kc
TD
T
Si la integracion emplea el metodo trapezoidal, entonces:
u(k) = Kc
e(k) +
1
TI
k∑
i=1
[T
e(i − 1) + e(i)
2
]+
TD
T[e(k) − e(k − 1)]
u(k − 1) = Kc
e(k − 1) +
1
TI
k−1∑
i=1
[T
e(i − 1) + e(i)
2
]+
TD
T[e(k − 1) − e(k − 2)]
Restando las expresiones anteriores teniendo en cuenta que:
k∑
i=1
[e(i − 1) + e(i)] =k−1∑
i=1
[e(i − 1) + e(i)] + e(k − 1) + e(k)
y despejando u(k) obtenemos una expresion similar a (2.69), donde:
q0 = Kc
[1 +
TD
T+
T
2TI
]; q1 = −Kc
[1 + 2
TD
T− T
2TI
]; q2 = Kc
TD
T
2.5. Sistemas con Tiempo Muerto
En algunos sistemas industriales, el tiempo muerto se debe de tomar en cuentacuando por ejemplo existe un retardo considerable hasta que la senal de controlllegue al actuador. En otro caso, dicho retardo aparece cuando el punto de medicionesta lejos de la zona de interes, por ejemplo, cuando en la planta solo se puedeninstalar sensores lejos de la zona de interes para la medicion. Este tiempo muertopuede existir en la entrada u(t), en la salida y(t) o en el vector de estado x(t) delsistema, tal como se ilustra a continuacion:
x(t) = Ax(t − τx) + Bu(t − τu) y(t − τy) = Cx(t) + Du(t) (2.70)

2.5 Sistemas con Tiempo Muerto 59
Donde τx, τu y τy son los tiempos muertos. En el dominio continuo, el tiempo muertoτ se modela mediante la siguiente expresion de la transformada de Laplace: e−τs. Siτ = d T , donde d = 1, 2, . . . y T es el tiempo de muestreo, y definiendo la unidad dedesplazamiento discreto como: eτs = z, entonces, en el dominio discreto, el tiempomuerto toma la forma z−d. Este tiempo muerto puede existir en la entrada, en lasalida o en el vector de estado del sistema, tal como se ilustra a continuacion:
x(k + 1) = Gx(k − dx) + Hu(k − du) y(k + dy) = Cx(k) (2.71)
donde los tiempos muertos dk, du y dy toman valores enteros positivos.
Resulta util emplear la aproximacion de Pade para modelar el tiempo muerto enel dominio continuo:
e−τs = 1 − sτ +1
!2(sτ)2 − 1
!3(sτ)3 + · · · =
num(s)
den(s)
Con una aproximacion de tercer orden podemos acomodar retardos de fase de hasta200o (3.5 rad) [4], lo cual es suficiente para capturar el efecto del tiempo muerto enmuchas aplicaciones. Tal aproximacion tiene la forma:
e−τs ≈ num(s)
den(s)=
1 − τs/2 + (τs)2/10 − (τs)3/120
1 + τs/2 + (τs)2/10 + (τs)3/120
La principal ventaja de usar una aproximacion racional para el tiempo muerto estransformar el modelo del sistema dado en (2.70) en otro modelo sin tiempos muertos.
Ejemplo 2.48
Comparar la respuesta a un escalon del sistema:
y(s)
u(s)=
10
2s + 1e−5.8s
con respecto a la respuesta originada por el sistema cuando el tiempo muerto seaproxima con una relacion de Pade de tercer orden. Luego, determinar la ecuacionde estado aproximada del sistema.
Solucion: El programa ejpade.m resuelve el problema planteado y los resultados seilustran en la Fig. 2.16.
% ejpade.m SISTEMAS CON TIEMPO MUERTO D Y CON APROXIMACION DE PADE
clear all; close all; clc; s = tf(’s’); % HABILITA FT
D = 5.8; numD=-D^3*s^3/120+D^2*s^2/10-D*s/2+1;
denD=D^3*s^3/120+D^2*s^2/10+D*s/2+1; % exp(-s*D) = numD/denD
Gp=10/(2*s+1); G1=Gp*exp(-s*D); G2=Gp*(numD/denD); step(G1,G2,’--’)
print -deps -f ejpades; sis=ss(G2); % sis: MODELO EN EL ESPACIO DE ESTADO

60 Sistemas Continuos
0 5 10 15 20 25−2
0
2
4
6
8
10
Step Response
Time (sec)
Am
plitu
de
exp(−sD)
Padé de 3er orden
Fig. 2.16: Comparacion de las respuestas a un escalon del sistema y de su modeloaproximado mediante una aproximacion de Pade de tercer orden (ejemplo 2.48).
2.6. Linealizacion de Sistemas Continuos
2.6.1. Caso SISO
El desarrollo de la serie de Taylor permite expandir una expresion no lineal con-tinua Y = f(X) alrededor de un punto de operacion (o estado de equilibrio) X comosigue:
Y = f(X) = f(X) +df
dX
∣∣∣∣(X=X)
(X − X)
1!+
d2f
dX2
∣∣∣∣(X=X)
(X − X)2
2!+ · · · (2.72)
Si la expresion de Y depende de las n variables X1, . . . , Xn, entonces el desarrollo deTaylor, despreciando los terminos de orden mas alto, produce:
Y = f(X1, . . . , Xn) = f(X1, . . . , Xn) +∂f
∂X1
∣∣∣∣(X1=X1)
(X1 − X1)
+∂f
∂X2
∣∣∣∣(X2=X2)
(X2 − X2) + · · · + ∂f
∂Xn
∣∣∣∣(Xn=Xn)
(Xn − Xn) (2.73)
Ejemplo 2.49
Linealizar la siguiente taza de reaccion rA para el punto de operacion (T , CA):
rA = k0e− E
RT CA

2.6 Linealizacion de Sistemas Continuos 61
donde k0, E y R son constantes.
Solucion: Aplicando (2.73) con X1 = T y X2 = CA se obtiene:
rA = rA + C1t + C2cA t = T − T cA = CA − CA
rA = k0e− E
RT CA
C1 =∂rA
∂T
∣∣∣∣(T=T )
C2 =∂rA
∂CA
∣∣∣∣(CA=CA)
(2.74)
Las variables t y cA se denominan variables residuales o de desviacion.
2.6.2. Caso MIMO
Un sistema MIMO no Lineal invariante con el tiempo de orden n se puede repre-sentar como:
X = f(X,U) Y = g(X,U) (2.75)
X1...
Xn
=
f1(X,U)...
fn(X,U)
Y1...
Yp
=
g1(X,U)...
gp(X,U)
U =
U1...
Um
donde f(X,U) es la ecuacion de estado del sistema, mientras que g(X,U) es laecuacion de salida. Tanto f como g son funciones vectoriales de las variables vec-toriales X y U. El desarrollo de Taylor para la ecuacion de estado de este sistema,resulta:
X = f(X,U) +
[∂f(X,U)
∂X(X − X) +
∂f(X,U)
∂U(U − U)
]+
1
2!
[∂2f(X,U)
∂x2(X − X)2 + 2
∂2f(X,U)
∂X∂U(X − X)(U − U) +
∂2f(X,U)
∂U2(U − U)2
]+ · · ·
Despreciando los terminos de orden dos se obtiene:
X = f(X,U) = f(X,U) +∂f
∂X
∣∣∣∣(X,U)
(X − X) +∂f
∂U
∣∣∣∣(X,U)
(U − U)
X − f(X,U) = x =∂f
∂X
∣∣∣∣(X,U)
x +∂f
∂U
∣∣∣∣(X,U)
u (2.76)
Del mismo modo, la ecuacion de salida del sistema se puede formular como:
y =∂g
∂X
∣∣∣∣(X,U)
x +∂g
∂U
∣∣∣∣(X,U)
u (2.77)
Por consiguiente, las formas linealizadas de (2.76) y (2.77) se puede expresar como:
x = Ax + Bu y = Cx + Du (2.78)
donde A es la matriz de estado de orden n × n, B es la matriz de distribucion deorden n×m, C es la matriz de salida de los estados de orden p× n y D es la matrizde salida de las entradas de orden p × m, x = X − X es el vector residual (o dedesviacion) de estados, u = U − U es el vector residual de control, e y = Y − Y es

62 Sistemas Continuos
el vector residual de la salida. Los estados estacionarios o de equilibrio de X y U sonX y U respectivamente, mientras que el estado estacionario del vector de salida Y,cuando el sistema esta controlado, es el vector de referencias o set points R; es decir:Y = R.
El procedimiento de linealizacion significa entonces que estamos asumiendo varia-ciones pequenas de la dinamica del sistema alrededor del estado estacionario o deequilibrio. Las matrices A, B, C y D se determinadas evaluando las siguientes ma-trices jacobianas:
A =
∂f1
∂X1· · · ∂f1
∂Xn...
. . ....
∂fn
∂X1· · · ∂fn
∂Xn
(X,U)
B =
∂f1
∂U1· · · ∂f1
∂Um...
. . ....
∂fn
∂U1· · · ∂fn
∂Um
(X,U)
C =
∂h1∂X1
· · · ∂h1∂Xn
.... . .
...∂hr∂X1
· · · ∂hr∂Xn
(X,U)
D =
∂h1∂U1
· · · ∂h1∂Um
.... . .
...∂hr∂U1
· · · ∂hr∂Um
(X,U)
(2.79)
Ejemplo 2.50
La Fig. 2.17 muestra dos tanques identicos colocados en cascada. La seccion hori-zontal S=9 m2 de cada tanque es constante. El objetivo de control es estabilizar(controlar) la altura H2 empleando como fuerza de control el flujo de alimentacionQo. Determinar el modelo linealizado de este sistema hidraulico, su estabilidad y sufuncion de transferencia.
Tanque1
Tanque2
H
H
Q
Q
Q
p
ρ
γ
γ
ρ
1
2
0
0
1
2
p
p
p0
1
2
g
Fig. 2.17: Sistema hidraulico.
Solucion: Los flujos de salida Q1 y Q2 de los tanques se pueden modelar como:
Q1 = γ√
P1 − P0; Q2 = γ√
P2 − P0
donde P1, P2 y P0 son las presiones en el fondo de los tanques y en el exteriorrespectivamente, y γ=0.4 es una constante que depende de la geometrıa del orificio.Si ρ=1.23 kg/m3 es la densidad del lıquido y g=9.81 m/s2 es la aceleracion de lagravedad:
P1 − P0 = ρgH1 P2 − P0 = ρgH2

2.6 Linealizacion de Sistemas Continuos 63
El flujo acumulado en cada tanque es:
Q0 − Q1 = SdH1
dtQ1 − Q2 = S
dH2
dt
Definiendo las variables de estado X1 = H1 y X2 = H2 y la entrada U = Q0, yresolviendo las ecuaciones anteriores para X1 y X2, obtenemos:
X1 =1
SU − γ
√ρg
S
√X1 = f1(X, U)
X2 =γ√
ρg
S[√
X1 −√
X2] = f2(X, U)
y su correspondiente ecuacion de salida:
Y = h(X, U) = X2
Observar que las ecuaciones anteriores poseen las formas dada en (2.75)):
X = f(X, U) Y = h(X, U) = X2
donde la salida Y (la funcion g) y la entrada U son en este caso escalares, y:
X =
[X1
X2
]f =
[f1
f2
]
Definamos las siguientes variables residuales:
x1 = X1 − X1 x2 = X2 − X2 u = U − U
Conociendo que U = 3 m3/s, el estado estable del sistema se puede obtener de:
X1 =1
SU − γ
√ρg
S
√X1 = 0
X2 =γ√
ρg
S
[√X1 −
√X2
]= 0
lo que resulta en:
X1 = X2 =U
2
γ2ρg(2.80)
Aplicando el jacobiano, el sistema linealizado resulta:
x = Ax + Bu y = h(x, u) = x2 = Cx D = [0]
donde:
x =
[x1
x2
]; A =
[∂f1
∂X1
∂f1
∂X2∂f2
∂X1
∂f2
∂X2
]
(X1,X2,U)
=
− γ√
ρg
2S√
X1
0
γ√
ρg
2S√
X1
− γ√
ρg
2S√
X2
B =
[ ∂f1
∂U∂f2
∂U
]
(X1,X2,U)
=
[1/S0
]; C =
[∂h
∂X1
∂h
∂X2
]
(X1,X2,U)
= [0 1]
La estabilidad y la funcion de transferencia del sistema se computan con el programaC2tqh.m.

64 Sistemas Continuos
% C2tqh.m SISTEMA HIDRAULICO
clear all; close all; clc;
S = 9; gamma = 0.4; rho = 1.23; g = 9.81; Qoinf = 3; % PARAMETROS
X1bar = Ubar^2/(gamma^2*rho*g); X2bar = X1bar; % PUNTOS DE EQUILIBRIO
a11 = -gamma*sqrt(rho*g)/(2*S*sqrt(X1bar)); a21 = -a11;
a22 = -gamma*sqrt(rho*g)/(2*S*sqrt(X2bar));
A = [a11 0;a21 a22]; B = [1/S;0]; C = [0 1]; D = [0]; % SISTEMA LINEAL
eigA = eig(A); % EINGENVALORES: -0.0358 Y -0.0358 => SISTEMA ESTABLE
[P,Q] = ss2tf(A,B,C,D); % P = [0 0 0.004]; Q = [1 0.0715 0.0013]
% FUNCION DE TRANSFERENCIA: P(s)/Q(s)=0.004 /(s^2 + 0.0715s + 0.0013)
2.7. Problemas
Problema 2.1
Demostrar que AB 6= BA, cuando:
A =
1 −1 1−2 2 −1−2 1 0
B =
1 2 32 4 81 2 3
Problema 2.2
Demostrar que AB = AC, lo cual no necesariamente implica que B = C, , cuando:
A =
1 −3 22 1 −34 −3 −1
B =
1 4 1 02 1 1 11 −2 1 2
C =
2 1 −1 −23 −2 −1 −12 −5 −1 0
Problema 2.3
En general: (A±B)2 6= A2 ± 2AB + B2 y A2 −B2 6= (A + B)(A−B). Demostrarque (A ± B)2 = A2 + B2 cuando:
A =
2 −3 −5−1 4 51 −3 −4
B =
−1 3 51 −3 −5−1 3 5
Problema 2.4
Una matriz M es idempotente cuando M2 = M. Demostrar que A2 = A y B2 = B.
A =
2 −3 −5−1 4 51 −3 −4
B =
−1 3 51 −3 −5−1 3 5
Problema 2.5
Demostrar que la siguientes matriz es periodica, con perıodo igual a 2:
A =
1 −2 −6−3 2 92 0 −3

2.7 Problemas 65
Problema 2.6
Demostrar que la siguientes matriz es nilpotente:
A =
1 −3 −4−1 3 41 −3 −4
Problema 2.7
Dada las matrices:
A =
1 1 + i 2 + 3i1 − i 2 −i2 − 3i i 0
B =
i 1 + i 2 − 3i−1 + i 2i 1−2 − 3i −1 0
demostrar que A, iB y A∗ son hermitianas, y que B y B∗ son antihermitianas.
Problema 2.8
Empleando matematica simbolica demostrar que:[
λ 10 λ
]n
=
[λn nλn−1
0 λn
]
Problema 2.9
Empleando matematica simbolica demostrar que las matrices:
A =
a2 a 1 bcdb2 b 1 acdc2 c 1 abdd2 d 1 abc
B =
a3 a2 a 1b3 b2 b 1c3 c2 c 1d3 d2 d 1
poseen el mismo determinante: (a − b)(a − c)(a − d)(b − c)(b − d)(c − d).
Problema 2.10
Empleando matematica simbolica hallar la derivada con respecto a x del determinantede la matriz:
A =
x 1 2x2 2x + 1 x3
0 3x − 2 x2 + 1
Problema 2.11
Examine la dependencia o independencia lineal del siguiente conjunto de vectores. Siel conjunto es dependiente, seleccione el maximo subconjunto linealmente indepen-diente y exprese cada uno de los vectores dependientes como una combinacion linealde los independientes.
x1 =
2132−1
; x2 =
421−23
; x3 =
0056−5
; x4 =
63−1−67

66 Sistemas Continuos
Problema 2.12
Si la matriz A es antisimetrica e I+A es no singular, entonces B = (I−A)(I+A)−1
es ortogonal. Obtenga la matriz ortogonal B de:
A =
0 1 2−1 0 3−2 −3 0
Problema 2.13
Demostrar que los siguientes vectores son linealmente independientes y mutuamenteortogonales:
x1 = [1 + i i 1]T ; x2 = [i 1 − i 0]T ; x3 = [1 − i 1 3i]T
Problema 2.14
Si la matriz A es antihermitiana e I+A es no singular, entonces B = (I−A)(I+A)−1
es unitaria. Obtenga la matriz unitaria B de:
A =
0 i 1 + ii 0 i
−1 + i i 0
Problema 2.15
Demostrar que el producto xHAx es definida positiva y que el producto xHBx essemidefinida positiva, donde:
A =
1 1 + i −11 − i 6 −3 + i−1 −3 − i 11
B =
1 1 + i 1 + 2i1 − i 3 51 − 2i 5 10
Problema 2.16
Para cada ecuacion integro–diferencial, elaborar un programa en MATLAB paragraficar la salida y(t) cuando u(t) es un escalon unitario. Luego, elaborar un pro-grama en Simulink para visualizar la senal y(t). Todas las condiciones iniciales sonnulas.
(a) =dy(t)
dt+ 2y(t)
√5y(t) + 4
∫ t
0y(τ)dτ = u(t)
(b) =d2y(t)
dt2+
dy(t)
dty(t) = u(t)
(c) = −dy(t)
dt+ 2y2(t) + 4
∫ t
0y(τ)dτ = u(t)
(d) = −d2y(t)
dt2+ 7y3(t) −
∫ t
0y(τ)dτ = u(t)

2.7 Problemas 67
Problema 2.17
Determinar la ecuacion de estado y la ecuacion de salida de los sistemas:
(a) 2x1 + 3x2 − 5x3 = 4u1 − 3u2 + x1; x2 − x1 + 8x2 − 2x3 = −u1
2x2 − 5x3 = −3u1 − 4u2 − x3
y1 = x1 − 3x2 − u2; y2 = −3x1 + 7x3 + u1 − 5u2
(b) −x1 − 8x2 + x3 + x1 = u1; 2x1 + 4x2 − 2x3 = −3u2 − u2 + x2
2x2 − 5x3 = −3u1 + 3u2 + x3
y1 = 3x1 − x2 + u1; y2 = −x1 − 5x3 − 5u2
(c) 6x1 + 7x2 + x1 = 4u2; x2 − 3x1 + 5x2 + 62x3 = −u1 − 7u2
x2 − 6x3 = x3 − u1 + 9u2
y1 = 4x1 + x2 − u1 + u2; y2 = −3x1 + 7x2 − 5u2
(d) 3x2 − 5x3 + x1 = −3u1 + 3u2; x2 − 6x1 + 5x2 − 7x3 = −3u2
x1 − 2x2 − 5x3 + x3 = −3u1
y1 = x1 − u2 + 8u2; y2 = −3x2 + 7x3 − 9u1 − 2u2
donde u1 y u2 son las entradas, y1 e y2 son las salidas y x1, x2 y x3 son las variablesde estado.
Problema 2.18
Graficar la corriente i(t) que circula en un circuito serie RLC alimentado por una
baterıa E de 12 V, sabiendo que R = 5 Ω, C = 1 F, L = 2 H, i(0) = 1 A y di(0)dt = −1
A/s. Partiendo de la ecuacion caracterıstica del circuito, determine la estabilidad, lafrecuencia natural de oscilacion y el coeficiente de amortiguamiento de dicho circuito.
Problema 2.19
Una forma de determinar la estabilidad de un SLIT con entrada x(t) y salida y(t)conociendo su funcion G(t) de respuesta al impulso δ(t), es evaluando la siguientecondicion para estabilidad: ∫ ∞
−∞|G(τ)|dτ < ∞
Por ejemplo, para un integrador y(t) =∫ t0 x(τ)dτ con y(0) = 0, su respuesta al
impulso es: y(t) = G(t) =∫ t0 δ(τ)dτ = µ(t), que es la funcion escalon, la cual es igual
a 1 para t ≥ 1. El sistema es inestable porque:
∫ ∞
−∞|G(τ)|dτ =
∫ ∞
0|1|dτ = ∞
Aplicando este principio, determine G(t) y la estabilidad del sistema: y + 2y = x.
Problema 2.20

68 Sistemas Continuos
Hallar la transformada inversa de las FTs:
Ga(s) = (s3 + 6s2 + 11s + 6)/(s3 + 15s2 + 74s + 120) Gb(s) =3s3 + 20
s2(s + 1)
Problema 2.21
Para cada valor de c que se elija, seleccionar el valor de K que haga: lım y(t)t→∞ = 1en el sistema siguiente:
y(s)
u(s)=
K(s + c)
s2 + 3s + 100
Graficar para cada caso la respuesta al escalon de dicho sistema, usando MATLAB.
Problema 2.22
Determine la transformada inversa de:
Problema 2.23
Determine la matriz de transicion, la ecuacion caracterıstica, la estabilidad, la con-trolabilidad, la observabilidad (el primer elemento del vector de estado v es la salida)y la FT del sistema siguiente:
v =
[0 10 −2
]v +
[3−4
]u
Problema 2.24
Hallar varias ecuaciones de estado y de salida canonicas para el sistema:
y(s)
u(s)=
s3 − 2s + 1
s3 − 2s2 + 3s − 4
Problema 2.25
Un motor DC empleado en los sistemas de control de posicion angular θ y de velocidadangular θ = ω, se describe mediante la relacion: ω = −ω + u, donde u es el voltajede entrada al motor que se asume constante y de magnitud A para el intervalo2T ≤ t ≤ 3T . Hallar θ(t) analıticamente.
Problema 2.26
El siguiente diagrama de bloques corresponde al sistema de control automatico de laprofundidad y de un submarino, el cual se logra generando un angulo de control aadecuado. Suponga que el submarino debe de navegar manteniendo una profundidadde r = −250 m. Empleando Simulink, determinar el valor de Kc y Kd usando elmetodo de prueba y error que haga que la salida y siga a la referencia r.
Problema 2.27

2.7 Problemas 69
2
2
(s − 1)
s + 1
1s
r e yK + K sc d
α
Fig. 2.18: Sistema de control de la profundidad de un submarino (problema 2.26).
Sabiendo que:[
deAt
dt
]t=0
= A, hallar la matriz de estado A de un sistema cuya matriz
de transicion es: [2e−tcos(t + 0,7) 3e−tcos(t + 1,5)e−tcos(t − 1,5) 2e−tcos(t − 0,7)
]
Problema 2.28
Las ecuaciones que rigen el calentamiento de un cuarto son:
qR = qa − qp qR = Ri2 qa = CtdTi
dtqp =
Ti − Ta
Rt
donde Ct = 4184 J/oC es la capacitancia termica, R = 20 Ω es la resistencia electrica,Rt = 0.1 oC/J es la resistencia termica, i(t) es una corriente de entrada tipo escalonde magnitud 0.5 A y de duracion 2000 s, cuyo valor inicial es 1 A. Ta es la temperaturaambiente que actua como una entrada tipo escalon de duracion 6000 s, cuyo valorinicial es 20 oC y su valor final es 15 oC, qR es el flujo de calor en J/s producido enR, qp es el flujo de calor en J/s que va al exterior y Ti es la temperatura en oC enel interior. Elaborar un programa en Simulink para graficar las senales i(t), Ta(t) yTi(t). Considerar que la temperatura Ti(0) inicial en el integrador es 22 oC.
Problema 2.29
En la Fig. 2.19, R es un escalon unitario y N es un disturbio escalon de magnitud0.1R. Emplear Simulink y usar el metodo de prueba y error para determinar losparametros Kc y Ki que hagan que la salida Y siga a la referencia R con suficienterapidez.
Kc + Ki/sR
N
10e−3s
−2s2e
4s+1
Y
Fig. 2.19: Sistema realimentado para el problema 2.29.
Problema 2.30

70 Sistemas Continuos
Graficar las salidas usando Simulink en el siguiente sistema de ecuaciones diferencialesacopladas:
dT
dt= A(T − To1)Fo − B(T − Ta)
dTa
dt= C(Ta − To2)Fo + D(Ta − T )
donde A = C = 0.08, B = D = 0.05. Tambien, Fo = 0.01 m3/min, To1 = 280K y To2
= 350 K son perturbaciones tipo escalon.
Problema 2.31
En la Fig. 2.20, R es un escalon unitario y N es un disturbio escalon de magnitud0.1R. Emplear Simulink y usar el metodo de prueba y error para determinar losparametros Kc y Ki que hagan que la salida Y siga a la referencia R con suficienterapidez.
Kc + Ki/sR
N
10e−3t
4s+1
2e −2t
Y
Fig. 2.20: Sistema realimentado para el problema 2.31.
Problema 2.32
Para el sistema mostrado en la Fig. 2.21 investigar empleando Simulink si es posiblehallar las ganancias K1, K2 y K3 que hagan que y1 siga a r1 y que y2 siga a r3 consuficiente rapidez.
1
4
3
2
5
s + 1
s + 2
s + 3
x
y1
2y
x
x
x
1
2
4
3
x 5
1u1K
2K2u
3u3K
r
r
r
1
2
3
s + 5
s + 4
Fig. 2.21: Sistema del problema 2.32

2.7 Problemas 71
Problema 2.33
La funcion de transferencia de un sistema tiene la forma:
G(s) =y(s)
u(s)=
5s2 − 0.9167s − 0.5417
s3 + 0.5833s2 + 0.0417s + 0,0417
Vıa Simulink determine: (a) su respuesta ye(t) a un escalon unitario, (b) su respuestayi(t) al impulso, (c) la salida y(∞) para la parte (b) usando el teorema del valor final,y (d) varias ecuaciones de estado y de salida canonicas.
Problema 2.34
Las poblaciones P1, P2 y P3 de tres especies en un area restringida esta gobernadapor las ecuaciones:
P1 = 2P1 + 3P2 + 6P3 + c1u
P2 = −3P1 + 3P2 + 8P3 + c2u
P3 = P1 − 3P2 + 2P3 + c3u
0 ≤ c1; 0 ≤ c2; 0 ≤ c3; c1 < −1 + c2 + c3
Elaborar un programa en MATLAB para graficar las respuestas P1(t), P2(t) y P3(t).
Problema 2.35
Dada la siguiente ecuacion de estado:
x(t) = −4x(t) + 2u(t)
graficar x(t) sabiendo que x(0) = 1 y u(t) es la rampa mostrada en la Fig. 2.22.
'$'$'$'$''$'$'$'$''$'$'$'$''$'$'$'$''$'$'$'$''$'$'$'$''$'$'$'$''$'$'$'$''$'$'$'$'
($($($($(($($($($(($($($($(($($($($(($($($($(($($($($(($($($($(($($($($(($($($($(1
1 t
u(t)
0
Fig. 2.22: Funcion rampa.
Problema 2.36
Para el punto de operacion:
x1 = −1, x2 = −1, u1 = −2, u2 = −1
hallar las ecuaciones de estado y de salida lineales del siguiente sistema no lineal ydeterminar su estabilidad.
x1 = −2x21 + 3x1x2 − u3
1 + u2 x2 = −4x31 + 6x2
1x2 − 4u31 − 2u2
2
y1 = 3x1 − 4u1 + 6u22 y2 = −3x2
1 + 4x2 + 2u1

72 Sistemas Continuos
Problema 2.37
En el sistema de la Fig. 2.23: (a) Determinar su ecuacion de estado y ecuacion desalida. (b) Hallar su matriz de transferencia. (c) Determinar su estabilidad. (d) Hallarla controlabilidad completa, la controlabilidad completa a la salida y la observabilidadcompleta. (e) Determinar la matriz de transicion con t0 = 0. (f) Hallar y1(t) e y2(t)donde u1(t) y u2(t) son entrada rampa unitaria. (f) Graficar y1(t) e y2(t). Se sugierehacer un programa.
1s + 1
2s + 2
4
6
u 1
u 2
y
y 2
1x
x
1
2
Fig. 2.23: Sistema del problema 2.37.
Problema 2.38
Para los sistemas de control mostrados en la Fig. 2.24, elabore los respectivos progra-mas en Simulink. Por tanteo, determine los valores de P, I y D que debe de poseer elbloque PID para que la salida y(t) siga a la senal escalon deseada r(t) en presenciade la carga (o disturbio) n(t). Tambien debe de verificar que cuando r(t) es nulo, lasalida y(t) debe de tender a cero. La magnitud de r(t) es 10 veces la magnitud den(t).
(a) G(s) =4(s + 1)(s + 2)
(s + 3)(s + 4)(s + 5)(s + 6)e−2s
(b) G(s) =2(s + 1)
(s + 3)(s + 4)(s + 5)(s + 6)(s + 8)e−3s
(c) G(s) =s2 + 2s + 1
(s + 3)4e−s
(d) G(s) =8
(s + 3)(s + 4)(s + 5)(s + 6)(s + 7)2(s + 8)e−4s

2.7 Problemas 73
PID G(s)r(t)
n(t)y(t)
Fig. 2.24: Sistema de control con presencia de disturbio.

Capıtulo 3
Transmision del Movimiento
En un sistema de control mecatronico, tanto de lazo abierto como de lazo cerrado, elactuador recibe la orden del controlador para generar el movimiento adecuado que actuesobre el mecanismo del sistema a controlar, con el proposito de que la salida del sistemasiga a una senal deseada de referencia.
El movimiento proporcionado por el actuador puede ser lineal, rotatorio o una com-binacion de ambos. En muchos casos, no es conveniente ni practico que tal movimientoactue directamente sobre el sistema mecatronico controlado. Para estos casos se requiereun mecanismo de transmision del movimiento entre el actuador y el sistema bajo control.
Los mecanismos de transmision del movimiento ideales (100 % eficientes) mantienenla cantidad de trabajo entre la entrada y la salida, pero pueden hacer variar el torque y lavelocidad entre los ejes de entrada y salida. Estas caracterısticas se usan frecuentementeen los sistemas mecatronicos.
En este capıtulo se emplean las leyes de la fısica para desarrollar los modelos demecanismos de transmision del movimiento rotatorio a rotatorio (engranajes, poleas confajas de transmision), de movimiento rotatorio a traslacion (tornillo sin fin, cremallera–pinon, faja–polea) y de movimiento cıclico (articulaciones, levas).
3.1. Transmision Rotatoria a Rotatoria
3.1.1. Engranajes
La Fig. 3.1 muestra un tren de dos engranajes. Suponiendo que existe un solopunto de contacto y sin friccion entre los dientes de los engranajes, la distanciarecorrida por cada diente es la misma:
∆θ1r1 = ∆θ2r2
La relacion n = ∆θ1/∆θ2 es la denominada relacion de engranajes, que para lasituacion particular que nos ocupa resulta n > 1. Por consiguiente:
n =r2
r1=
N2
N1=
∆θ1/∆t
∆θ2/∆t∼= θ1
θ2
(3.1)
donde N1 y N2 representan los numeros de dientes de los engranajes 1 y 2 respec-tivamente. Para un tren de dos engranajes 100 % eficiente (sin perdidas), el trabajo

76 Transmision del Movimiento
realizado a la entrada del primer engranaje debe de ser igual al trabajo realizado ala salida del segundo engranaje. Esto es:
T1θ1 = T2θ2
donde T1 es el torque de entrada y T2 es el torque de salida. Entonces:
n =N2
N1=
T2
T1T2 = nT1 n > 1 (3.2)
Observar que para la situacion mostrada en la Fig. 3.1, el torque de salida T2 seincrementa n veces.
)$)$))$)$))$)$))$)$)*$*$**$*$**$*$**$*$*+$++$++$+,$,,$,,$, rr1
T
T1
2
θθ12
N1
N 2
2
Fig. 3.1: Tren de dos engranajes.
3.1.2. Poleas con Faja de Transmision
La Fig. 3.2 muestra dos poleas con una faja de transmision que las une. Despre-ciando fuerzas de friccion entra las superficies que se tocan, el desplazamiento linealx a lo largo de la faja debe de ser el mismo:
x = ∆θ1r1 = ∆θ2r2
Por consiguiente: n = r2/r1 = d2/d1, donde d1 y d2 son los diametros de la poleas 1 y2 respectivamente. Por el principio de conservacion de la energıa, el trabajo realizadoen cada polea debe de ser el mismo:
T1θ1 = T2θ2 (3.3)
Entonces:
n =N2
N1=
T2
T1T2 = nT1 n > 1 (3.4)
Observar que las ecuaciones (3.3) y (3.4) son similares a las ecuaciones (3.1) y (3.2).Notar ademas que para la situacion mostrada en la Fig. 3.2, el torque de salida T2 seincrementa n veces debido a que r2 > r1.

3.2 Transmision Rotatoria a Traslacion 77
-$--$--$-.$..$..$. /$/$//$/$//$/$//$/$/0$0$00$0$00$0$00$0$0
T2
N 2
N 1
rθ 2
2
T1
θ1
r1
T1
Fig. 3.2: Poleas con faja de transmision.
3.2. Transmision Rotatoria a Traslacion
3.2.1. Tornillo de Avance
La Fig. 3.3 muestra un tornillo de avance que gira sin desplazamiento gracias ala accion de un motor, permitiendo que la tuerca o rodamiento a bolas se desplacelinealmente. Sea ∆x el desplazamiento lineal del tornillo correspondiente a un des-plazamiento angular ∆θ del mismo. Si ` es el avance del tornillo correspondiente auna vuelta completa de 2π radianes, entonces la siguiente relacion es valida:
∆x
`=
∆θ
2π= ∆xp p =
1
`(3.5)
donde p es el paso del tornillo que se expresa en unidades de vueltas por desplaza-miento. Sea n = 2πp la razon efectiva de engranajes. El trabajo realizado por unafuerza de carga F actuando durante el desplazamiento incremental ∆x, iguala al tra-bajo realizado por el torque T actuando en el eje mientras ocurre el desplazamientoangular ∆θ; es decir:
F∆x = T∆θ (3.6)
Reemplazando (3.5) en (3.6) se obtiene:
T =1
nF n = 2πp (3.7)
donde n es conocida como la razon efectiva de engranajes.
∆ θ∆ x
T
Tuerca o rodamiento de bolas (banco)
Tornillo sin fin
F
Fig. 3.3: Tornillo de avance.

78 Transmision del Movimiento
Ejemplo 3.1
Para el sistema mostrado en la Fig. 3.3, considere que m sea la masa del banco yde la pieza de trabajo (no mostrada en dicha figura). Determine la energıa cineticaK y el momento de inercia J del tornillo de avance. Sugerencia: parta de la energıacinetica de la masa m.
Solucion: La energıa cinetica de la masa m moviendose a una velocidad x se expresacomo:
K =1
2mx2
Dividiendo ambos miembros de (3.5) entre ∆t y tomando lımites se obtiene la sigu-iente derivada:
dx
dt=
1
2πp
dθ
dt⇒ x =
1
2πpθ
Por consiguiente:
K =1
2Jθ2 J =
1
(2πp)2m =
1
n2m n = 2πp
donde J es el momento de inercia pedido.
3.2.2. Cremallera y Pinon
La Fig. 3.4 muestra un pinon girando un angulo ∆θ, el cual fuerza a una cremalleramoverse longitudinalmente un incremento ∆x. Esto significa que:
∆x = r∆θ x = rθ x = rθ
La energıa cinetica K de la masa m se expresa como:
K =1
2mx2 =
1
2m r2θ2 =
1
2Jθ2 J =
1
p2m r =
1
p
donde J es el momento de inercia de la carga. Como en el caso del tornillo de avance,el trabajo realizado por una fuerza de carga F actuando durante el desplazamiento∆x, iguala al trabajo realizado por el torque T actuando en el eje del pinon mientrasocurre el desplazamiento angular ∆θ:
F∆x = T∆θ F x = Frθ = F1
pθ = T θ (3.8)
por consiguiente:
T =1
pF =
1
nF
donde n = p es conocida como la razon efectiva de engranajes.
3.2.3. Faja de Transporte y Poleas
La Fig. 3.5 muestra una faja de transporte accionada por un cable que pasa pordos poleas, una de las cuales esta acoplada al eje de un motor que la hace girar.En general, la combinacion faja de transporte y poleas se emplea para convertirun movimiento rotatorio a rotatorio o un movimiento rotatorio a lineal. La Fig.3.5 muestra el caso de conversion movimiento rotatorio a movimiento lineal. Lasrelaciones deducidas para el mecanismo cremallera–pinon tambien se aplican aquı.

3.3 Transmision de Movimiento Cıclico 79
121212112121211212121323233232332323
424242442424244242424424242452525525255252552525
626262662626266262626727277272772727
8282882828828288282892929929299292992929:2::2:;2;;2;
<2<2<2<<2<2<2<<2<2<2<<2<2<2<=2=2==2=2==2=2==2=2=
Cremallera
x∆ ∆θPiñón de radio r
Carga de masa m
Fig. 3.4: Cremallera con pinon.
Carga de masa m
rrT
θ
x = r F x = T θ θ
F
x
Fig. 3.5: Faja de transporte con dos poleas.
3.3. Transmision de Movimiento Cıclico
3.3.1. Articulaciones
Un sistema articulado consiste de un conjunto de eslabones unidos uno con el otro,en donde el movimiento de un miembro se transmite hacia los otros. Un ejemplo tıpicoes el movimiento coordinado biela–manivela–embolo en los motores de combustion(Fig. 3.6).
ÉmboloManivela
Biela
Fig. 3.6: Movimiento coordinado biela–manivela–embolo.
Ejemplo 3.2
La Fig. 3.7(a) muestra un servomecanismo hidraulico de posicion. En este sistema[38], la carga de masa M debe de seguir el desplazamiento horizontal x aplicado enel punto D de la palanca. Determine la funcion de transferencia y(s)/x(s).
Solucion: Para la servovalvula de la Fig. 3.7(a) se puede formular:
QL =Q1 + Q2
2= k1x1 − k2∆P

80 Transmision del Movimiento
donde QL es el flujo en la servovalvula, x1 es el desplazamiento de los carretes par-tiendo de su posicion central y ∆P = P1 − P2 es la diferencia de presion entre lascamaras del actuador. Tambien:
d∆P
dt= k3QL − k4v v =
dy
dt
donde v es la velocidad de movimiento del embolo del actuador hidraulico e y esla posicion de la masa M. La fuerza aplicada al embolo de area A produce unaaceleracion dv/dt en la masa M como sigue::
F = A∆P = Mdv
dt
Por otro lado, la palanca mecanica mostrada en la Fig. 3.7(b) actua como un dispo-sitivo de realimentacion donde por semejanza de triangulos se tiene:
x − y
d1=
x1 − x
d − d1→ x1 = (1 − d/d1)y + dx/d1
Operando con las relaciones anteriores se puede construir el diagrama de bloques dela Fig. 3.7(c), de donde se deduce la FT pedida:
y
x=
(d/d1)(k1k3A/M)
s2 + k2k3s2 + (k4A/M)s + (d/d1 − 1)(k1k3A/M)
>$>>$>?$??$?
@$@@$@A$AA$AB$B$BB$B$BB$B$BB$B$BC$C$CC$C$CC$C$CC$C$C
D$D$DD$D$DD$D$DD$D$DD$D$DE$E$EE$E$EE$E$EE$E$EE$E$E
F$F$FF$F$FF$F$FF$F$FG$G$GG$G$GG$G$GG$G$G
H$H$HH$H$HH$H$HH$H$HH$H$HH$H$HH$H$HH$H$HH$H$H
I$I$II$I$II$I$II$I$II$I$II$I$II$I$II$I$II$I$I
JK LMNO PQRSTUVWXYZ[
\\]] ^_
`$`$`$`$`a$a$a$a$abbccd$d$de$e$effgg
hhii
j$jj$jj$jj$jj$jj$jj$jj$jj$jj$jj$jj$jj$j
kkkkkkkkkkkkk llmm nnoo p$pq$q
rrrrrr
ssssss
ttttuuuu
vvvvvvvvvvvvv
wwwwwwwwwwwww
x$x$xx$x$xx$x$xx$x$xx$x$xx$x$xx$x$xx$x$xx$x$x
y$y$yy$y$yy$y$yy$y$yy$y$yy$y$yy$y$yy$y$yy$y$y
z$z$z$zz$z$z$zz$z$z$zz$z$z$zz$z$z$zz$z$z$zz$z$z$zz$z$z$zz$z$z$z
$$$$$$$$$$$$$$$$$$|$|$|$|$|$|$|$$$$$$
~$~$~$~$~$~$~$$$$$$
$$ $$
$$$$$$$$
$$C
B
D
MP P1 2
Q Q1 2
Presión Baja Alta Baja
Carga
Actuador
Servoválvula
Carrete
Palanca
x
x
1
yx−y
x −x1x 1
x
C
D
B
1
(b)(a)
xx1k
Q L3k
dtd P
1/sP
AF
1/(Ms)v
1/sy
k 2
4k
(c)
dd 1
d
d
d/d11
d/d −11
Fig. 3.7: (a) Servomecanismo hidraulico. (b) Palanca de realimentacion. (c) Diagramade bloques.

3.4 Momentos de Inercia 81
3.3.2. Levas
Las levas convierten el movimiento rotatorio de un eje en movimiento de traslacion.En el caso de las levas, la razon entre el movimiento de traslacion y el movimientorotatorio no es fijo, sino una funcion no lineal que depende de la forma geometrica(el perfil) de la leva. Este perfil se disena segun la aplicacion. Incluso, un solo ejepuede alojar levas con diferentes perfiles, o con un mismo perfil pero desplazadosconvenientemente uno del otro.
La Fig. 3.8 ilustra tres diagramas de desplazamiento del seguidor (en forma decuchilla), los cuales fueron generados con tres diferentes formas de leva.
Seguidor Desplazamiento
900 180 360270Leva excéntrica
Desplazamiento
900 180 360270
Seguidor Desplazamiento
900 180 360270
Leva en forma de corazón
Leva en forma de pera
Seguidor
Fig. 3.8: Diagramas del desplazamiento de los seguidores de las levas.
3.4. Momentos de Inercia
3.5. Problemas
Problema 3.1
La Fig. 3.9(a) muestra un sistema hidraulico para el control de la presion P en latuberıa, donde el actuador es del tipo piston, mientras que el controlador es del tipo

82 Transmision del Movimiento
tobera. Asumir que el actuador tiene el siguiente comportamiento:
y
y3=
KI
s(Ts + 1)
donde KI es una constante, T es la constante de tiempo y s es la variable laplaciana.Las Fig. 3.9(b) y 3.9(c) corresponden a la relacion entre los desplazamientos y1, y2,y3, y4 e y con las longitudes d1, d2, d3, d4 y d5, es decir:
y2 =d2
d1y1 y3 =
d3
d1y1 y4 =
d4
d5y
Tomando momentos con respecto al punto pivote:
Kwd1 − Kxd1 − Krd2 = Xdd1 − Krd2 = 0
La realimentacion del sistema esta compuesto por un amortiguador de constante dr
en serie con un resorte de constante cr, para las cuales son validas las relaciones:
Kd = drs(y4 − y5) Kr = Kd = cr(y5 − y2)
Empleando las ecuaciones anteriores demostrar:
y
Xd=
d1d5
crd2d4
(1 +
cr
drs
)(1
1 + d2d5KId3d4
s + d2d5TKId3d4
s2
)

3.5 Problemas 83
c r
y
y2
y5
Kr
y4
d5 dd r
4
P
x Kx
AAceite
y1
Pivote
Kw
d1
y3
2
d 3
d
y3 y2 y1
d 3
(a)
d1d2
5dd 4
(c)(b) yy4
Fig. 3.9: (a) Sistema de control de presion. (b) y (c) Triangulos de desplazamientos.


Capıtulo 4
Modelado de Sistemas Lineales
La dinamica de una gran variedad de sistemas se puede describir mediante un con-junto de ecuaciones diferenciales. Para construir un modelo adecuado para propositos decontrol, se requiere conocer suficientemente bien la dinamica del sistema. No siempre esconveniente que un modelo sea lo mas exacto posible a su comportamiento dinamico.Tener en cuenta que mientras mas complejo sea el modelo, mas dificultoso sera el analisisy diseno del sistema de control correspondiente. Lo recomendable es que el modelo delsistema mantenga las caracterısticas dinamicas de interes para el rango de operacion delsistema de control a disenar.
Los sistemas modelados en este capıtulo poseen parametros concentrados, son con-tinuos en el tiempo y son lineales, porque sus modelos dinamicos cumplen con el prin-cipio de superposicion . Por ello, tales sistemas se pueden describir mediante ecuacionesintegro–diferenciales lineales con parametros constantes.
En este capıtulo se aplican las leyes de la fısica para modelar sistemas mecanicos(traslacionales y rotacionales), electromecanicos, hidraulicos y termicos. El uso del soft-ware MATLAB es intensivo para propositos de simulacion. Todos los programas elabora-dos en este capıtulo se pueden bajar del link Descargas de www.ctlima.com.
4.1. Leyes Fundamentales
4.1.1. Elementos Ideales
La Tabla 4.1 describe los modelos dinamicos de los elementos ideales, mientrasque la Fig. 4.1 muestra los sımbolos de los mismos que a continuacion se describen.En esta tabla, la energıa se expresa en J (joule), la potencia en W (watt) y el tiempot en s (segundos).
La Fig. 4.1(a) muestra la inductancia electrica L en H (henrio), en donde secumple que la diferencia de potencial v21 = v2 − v1 en V (volt) es proporcional a lavariacion de la corriente i en A (ampere) con respecto al tiempo.
La Fig. 4.1(b) ilustra el resorte traslacional de constante K, en donde la variacionde velocidad v21 en m/s es proporcional a la variacion de la fuerza f en N (newton)con respecto al tiempo. Teniendo en cuenta que v21 = dx21/dt donde x21 = x2 − x1
es el cambio de posicion, es facil demostrar que f=Kx21. Por ello, K esta en N/m.La Fig. 4.1(c) muestra el resorte rotacional de constante K en N–m/rad, en donde
el cambio de velocidad angular ω21 en rad/s es proporcional a la variacion del torque

86 Modelado de Sistemas Lineales
Tabla 4.1: Modelos dinamicos para elementos ideales.
Almacenador Elemento Ecuacion Energıa E oo disipador fısico descriptiva potencia P
Almacenador Inductancia
inductivo electrica L v21 = Ldidt E = 1
2Li2
Almacenador Resorte
inductivo traslacional v21 = 1K
dfdt E = 1
2F 2
K
Almacenador Resorte
inductivo rotacional ω21 = 1K
dTdt E = 1
2F 2
K
Almacenador Inercia
inductivo fluıdica p21 = I dqdt E = 1
2Iq2
Almacenador Capacitancia
capacitivo electrica i = C dv21dt E = 1
2Cv221
Almacenador
capacitivo Masa f = M dvdt E = 1
2Mv2
Almacenador Momento
capacitivo de Inercia T = J dωdt E = 1
2Jω2
Almacenador Capacitancia
capacitivo fluıdica q21 = Cfdp21
dt E = 12Cfp2
2
Almacenador Capacitancia
capacitivo termica q = CtdTdt E = CtT
Disipador Resistenciade energıa electrica i = 1
Rv21 P = 1Rv2
21
Disipador Amortiguadorde energıa traslacional f = Bv21 P = Bv2
21
Disipador Amortiguadorde energıa rotacional T = Bω21 P = Bω2
21
Disipador Resistenciade energıa fluıdica q = 1
Rfp21 P = 1
Rfp221
Disipador Resistenciade energıa termica q = 1
RtT21 P = 1
RtT21

4.1 Leyes Fundamentales 87
Kf
ω ω21 TTK
C
Li
v v 2
iv 1 v2
f
fM
(g)(e) (f)
p1
p2 q 2q 1
C f
(h)
v
J ω T
q TC t i R
v1 v2
ω1 T T 2ωff B
(i) (j) (k) (l)
p1I
p2q
2T1 Tq
R t
(n)(m)
B
v2v
(a) (b) (c) (d)
θ1 θ 21
v2v1
q p2p 1
Rf
Fig. 4.1: Sımbolos de los elementos ideales.
con respecto al tiempo dT/dt en N–m/s (newton–metro/segundo). Considerando queω21 = dθ21/dt donde θ21 en rad es el cambio de posicion angular, es facil demostrarque T = Kθ21. Por ello, K esta en N–m/rad.
En la Fig. 4.1(d) se cumple que el cambio de presion p21 en N/m2 es proporcionala la variacion del flujo q en m3/s con respecto al tiempo. La constante de propor-cionalidad I es la inercia fluıdica, la cual posee las unidades N–s2/m5 puesto que lainercia fluıdica se expresa como:
I =p21
dq/dt
La Fig. 4.1(e) ilustra la capacitancia electrica C en F (faradio), en donde lacorriente i en A (ampere) que circula a traves de C es proporcional a la diferencia depotencial v21 en V (volt) con respecto al tiempo.
La Fig. 4.1(f) muestra la masa M en kg (kilogramo), en donde la fuerza f en N(newton) que actua sobre M produce la aceleracion a=dv/dt en m/s2, donde v enm/s es la velocidad de la masa M.
En la Fig. 4.1(g) se cumple que el torque de torsion T en N–m es proporcional ala aceleracion angular α = dω/dt en rad/s2. La constante de proporcionalidad J enN–m–s2/rad se denomina momento de inercia y es caracterıstico para cada cuerpodependiendo de su forma.
El flujo q en m/s3 de un fluido que existe en un conducto o recipiente (ver Fig.4.1(h)), es proporcional a la caıda o cambio de presion p21 con respecto al tiempo.La proporcionalidad mencionada define a la capacitancia fluıdica Cf en m5/N.
El flujo de calor q en J/s (joule/segundo) que circula en un conducto, es propor-

88 Modelado de Sistemas Lineales
cional al cambio de temperatura T en grados K (kelvin) con respecto al tiempo. Laproporcionalidad mencionada define a la capacitancia termica Ct en J/K, la cual semuestra en la Fig. 4.1(i).
La Fig. 4.1(j) muestra una resistencia electrica R en Ω (ohm), en donde la corrientei en A es proporcional a la caıda de voltaje v21. Notar que la proporcionalidad es lainversa de R, la cual se denomina conductancia G=1/R y su unidad es f (mho).
La fuerza f en N que se ejerce en el amortiguador traslacional mostrado en laFig. 4.1(k), es proporcional al cambio de velocidad v21. La proporcionalidad B sedenomina la constante de friccion viscosa traslacional, cuya unidad es N–s/m.
El torque T en N–m que se ejerce en el amortiguador rotacional mostrado en laFig. 4.1(l), es proporcional al cambio de velocidad angular ω21. La proporcionalidadB se denomina la constante de friccion viscosa rotacional, cuya unidad es N–m–s/rad.
La resistencia fluıdica Rf se define como la variacion de la presion p21 en unconducto o recipiente, con respecto al flujo q del fluido en m3/s, tal como se muestraen la Fig. 4.1(m). Por ello, Rf = p21/q se expresa en N–s/m5.
De igual manera, la resistencia termica Rt se define como la variacion de la tem-peratura T21 en grados K (kelvin) en un conducto, con respecto al flujo q de caloren J/s, tal como se observa en la Fig. 4.1(n). Por ello, Rt posee las unidades K/J.
4.1.2. Ley de D′
Alambert
La segunda ley de Newton para sistemas traslacionales establece que:
∑
i
(fext)i = Mdv
dt
donde el miembro de la izquierda representa la suma de todas las fuerzas externas(fext)i actuando sobre el cuerpo de masa M , mientras que dv
dt es la aceleracion que
adquiere dicha masa. La ley de D′
Alambert considera al termino M dvdt como una
fuerza inercial que se suma algebraicamente a las otras fuerzas externas. De estemodo, esta ley establece que la suma de todas las fuerzas actuando sobre la masa Mestan en equilibrio. Es decir:
∑
i
fi =∑
i
(fext)i − Mdv
dt= 0
dv
dt> 0 (4.1)
La fuerza inercial M dvdt se representa con lıneas de trazos en el diagrama de cuerpo
libre.
La ley de D′
Alambert para un cuerpo con momento de inercia J constante yrotando alrededor de un eje fijo se formula como:
∑
i
τi =∑
i
(τext)i − Jdω
dt= 0
dω
dt> 0 (4.2)
donde∑
i τi representa todos los torques actuando en el cuerpo, incluyendo el torqueinercial J dω
dt . Este torque se representa con lıneas de trazos en el diagrama de cuerpolibre.

4.1 Leyes Fundamentales 89
4.1.3. Ley de Accion y de Reaccion
La ley accion y reaccion, la tercera ley de Newton, establece que a toda accioncorresponde una reaccion de igual magnitud pero de sentido contrario. La Fig. 4.2(b)ilustra esta ley para un sistema traslacional sin presencia de fuerzas de friccion, endonde la fuerza fK actuando a cada extremo del resorte aparecen tambien en la paredy en la masa M, con igual magnitud, pero de sentido contrario.
fK fK fKfKK
M
(b)(a)
MK
Fig. 4.2: Ley de accion y reaccion en un sistema traslacional. (a) Sistema. (b) Dia-grama de cuerpo libre.
La Fig. 4.3(b) ilustra esta ley para un sistema rotacional sin presencia de fuerzasde friccion, en donde el torque K1θ1 ejercido por el disco de la derecha en un extremodel eje K1, aparece tambien en el otro extremo del eje, pero en sentido contrario.
1K θ 1
1K θ 1J J1
K K2
1
θθ1
2
τ
2
K1
(a) (b)
Fig. 4.3: Ley de accion y reaccion en un sistema rotacional. (a) Sistema. (b) Diagramade cuerpo libre del eje K1.
4.1.4. Ley de los Desplazamientos
La ley de los desplazamientos establece que para algun instante, la suma algebraicade las diferencias en elongaciones alrededor de un camino cerrado es cero. Esto es:
∑
i
(4x)i = 0 (4.3)
La Fig. 4.4 ilustra esta ley en un sistema traslacional sin friccion, en donde las elon-gaciones de B1, B2 y K son x1, x2 − x1 y x2 respectivamente. En el unico caminocerrado que existe se cumple que:
x1 + (x2 − x1) + x2 = 0

90 Modelado de Sistemas Lineales
2M
K
B1 B
x1
x22
Fig. 4.4: Sistema traslacional para ilustrar la ley de los desplazamientos.
Para sistemas rotacionales, la ley de los desplazamientos establece que para alguninstante, la suma algebraica de las diferencias en desplazamientos angulares alrededorde un camino cerrado es cero. Esto es:
∑
i
(4θ)i = 0 (4.4)
La Fig. 4.3(a) ilustra esta ley. Asumamos una referencia vertical correspondiente aun desplazamiento angular 0. El desplazamiento vertical del disco J1 es con respec-to a la referencia nula: (θ1 − 0). Para el eje K2 la diferencia en desplazamiento es(θ2 − θ1), mientras que para el disco J2 la diferencia es (0 − θ2). La suma de estosdesplazamientos resulta 0.
4.1.5. Leyes de Kirchhoff
La ley de los voltajes de Kirchhoff establece que la suma algebraica de los voltajesej a traves de los elementos de un lazo circuital es nulo, es decir:
∑
j
ej = 0 (4.5)
Por ejemplo, en el circuito de la a Fig. 4.5(a) se cumple:
e1 − e2 + e3 − e4 = 0
Por otro lado, La ley de las corrientes de Kirchhoff establece que la suma alge-braica de las corrientes ij en un nodo circuital es nulo, es decir:
∑
j
ij = 0 (4.6)
Por ejemplo, en el circuito de la a Fig. 4.5(b) se cumple:
i1 + i2 − i3 = 0

4.2 Momento de Inercia 91
ii
i
1 2
3
C
R
L
R R1 2
e
ee
e
1
2
3
4
C
(b)(a)
Fig. 4.5: Circuitos electricos para ilustrar las leyes de Kirchhoff.
4.2. Momento de Inercia
El momento de inercia o inercia J de un cuerpo de masa puntual m y que seencuentra a una distancia r de un eje de rotacion se define como:
J = mr2
Para un sistema de partıculas y un eje arbitrario, el momento de inercia J se definecomo la suma de los productos de las masas mi de las partıculas por el cuadrado dela distancia ri de cada partıcula a dicho eje:
J =∑
mir2i
Para un cuerpo de masa continua, la definicion de J se puede generalizar como:
J =
∫
mr2dm =
∫
Vρr2 dV ρ =
dV
dm
donde V es el volumen del cuerpo y ρ su densidad.
Teorema de los Ejes Paralelos
El teorema de los ejes paralelos establece que el momento de inercia J de uncuerpo de masa M con respecto a cualquier eje paralelo a un eje que pasa por elcentro de masa del cuerpo, es igual al momento de inercia con respecto al eje quepasa por el centro de masa, denominado Jo, mas el producto de la masa M por elcuadrado de la distancia a entre los dos ejes:
J = Jo + Ma2
Ejemplo 4.1
La Fig. 4.6(a) muestra una barra de longitud L y masa M que gira en su puntomedio. Para esta situacion se sabe que su momento de inercia es Jo = ML2/12. Sedesea hallar el momento de inercia para las configuraciones mostradas en las Figs.4.6(b) y 4.6(c).

92 Modelado de Sistemas Lineales
L d 1d 2
(a) (b) (c)
L/2L/2
Fig. 4.6: Barra con punto pivote en el medio (a), barra con punto de giro al extremo(b) y barra con punto de giro a una distancia d1 del extremo izquierdo.
Solucion: Para hallar el momento de inercia de la configuracion (b) aplicamos elteorema de ejes paralelos como sigue:
J = Jo + M
(L
2
)2
=1
3ML2
Para hallar el momento de inercia de la configuracion (c), basta con sumar la con-tribucion de cada una de las secciones de la barra al momento de inercia total. paraello determinamos primero las masas M1 y M2 correspondientes a cada seccion comoseigue:
M1 =d1
d1 + d2M M2 =
d2
d1 + d2M
Empleando el resultado anterior, el momento de inercia resulta:
J =1
3M1d
21 +
1
3M2d
22 =
M(d31 + d3
2)
3(d1 + d2)
Momentos de Inercia Especiales
A continuacion se formulan los momentos de inercia para algunos cuerpos rıgidos.En lo que sigue, CM significa Centro de Masa.
1. Paralelipedo rectangular con lados a, b y c que:
gira alrededor de un eje paralelo al lado c y pasa por el centro de la caraab (Fig. 4.7(a)). Momento de inercia: M(a2 + b2)/12.
gira alrededor de un eje paralelo al lado a y pasa por el centro de la carabc ((Fig. 4.7(b)). Momento de inercia: M(4a2 + b2)/12.
2. Plato rectangular delgado con lados a y b que:
gira alrededor de un eje perpendicular al plato y pasa por su centro (Fig.4.7(c)). Momento de inercia: M(a2 + b2)/12.
gira alrededor de un eje paralelo al lado b y pasa por el centro de la caraab (Fig. 4.7(d)). Momento de inercia: Ma2/12.
3. Cilindro circular de radio a y altura h que:

4.2 Momento de Inercia 93
gira alrededor del eje del cilindro (Fig. 4.7(e)). Momento de inercia: Ma2/2.
gira alrededor de un eje perpendicular al eje del cilindro y pasa por el CMdel cilindro (Fig. 4.7(f))). Momento de inercia: M(h2 + 3a2)/12.
gira alrededor de un eje que coincide con el diametro de un extremo delcilindro (Fig. 4.7(g)). Momento de inercia: M(4h2 + 3a2)/12.
4. Cilindro circular hueco de radio externo a, radio interno (b) y altura h que:
gira alrededor del eje del cilindro (Fig. 4.7(h)). El momento de inercia paraesta situacion es: M(a2 + b2)/2.
gira alrededor de un eje perpendicular al eje del cilindro y pasa por el CMdel cilindro (Fig. 4.7(i)). Momento de inercia: M(3a2 + 3b2 + h2)/12.
gira alrededor de un eje que coincide con el diametro de una cara circulardel cilindro (Fig. 4.7(j )). Momento de inercia: M(3a2 + 3b2 + 4h2)/12.
5. Plato circular de radio a que:
gira alrededor de un eje perpendicular al plato y pasa por su centro (Fig.4.7(k)). Momento de inercia: Ma2/2.
gira alrededor de un eje que coincide con un diametro del plato (Fig.4.7(l)). Momento de inercia: Ma2/4.
6. Anillo circular de radio externo a y radio interno b que:
gira alrededor de un eje perpendicular al plano del anillo y pasa por sucentro (Fig. 4.7(m)). Momento de inercia: M(a2 + b2)/2.
gira alrededor de un eje que coincide con un diametro del anillo (Fig.4.7(m)). Momento de inercia: M(a2 + b2)/4.
7. Anillo circular delgado de radio a que:
gira alrededor de un eje perpendicular al plano del anillo y pasa por sucentro (Fig. 4.7(o)). Momento de inercia: Ma2.
gira alrededor de un eje que coincide con un diametro del anillo (Fig.4.7(p)). Momento de inercia: Ma2/2.
8. Esfera maciza de radio a que:
gira alrededor de un eje que coincide con un diametro de la esfera (Fig.4.7(q)). Momento de inercia: 2Ma2/5.
gira alrededor de un eje tangente a la superficie de la esfera (Fig. 4.7(r)).Momento de inercia: 7Ma2/5.
9. Esfera hueca de radio externo a y radio interno b que:
gira alrededor de un eje que coincide con un diametro de la esfera (Fig.4.7(s)). Momento de inercia: 2
5 M(a5 − b5)/(a3 − b3).
gira alrededor de un eje tangente a la superficie de la esfera (Fig. 4.7(t)).Momento de inercia: 2
5 M(a5 − b5)/(a3 − b3) + Ma2.

94 Modelado de Sistemas Lineales
10. Esfera hueca delgada de radio a que:
gira alrededor de un eje que coincide con un diametro de la esfera (Fig.4.7(u)). Momento de inercia: 2Ma2/3.
gira alrededor de un eje tangente a la superficie de la esfera (Fig. 4.7(v)).Momento de inercia: 5Ma2/3.
11. Elipsoide con semiejes a, b y c que:
gira alrededor de un eje que coincide con el semieje c (Fig. 4.7(w)). Mo-mento de inercia: M(a2 + b2)/5.
gira alrededor de un eje tangente a la superficie, paralelo al semieje c ya una distancia a del centro (Fig. 4.7(x)). Momento de inercia: M(6a2 +b2)/5.
12. Cono circular de radio a y altura h que:
gira alrededor del eje del cono (Fig. 4.7(y)). Momento de inercia: 3Ma2/10.
gira alrededor de un eje perpendicular al eje del cono y pasa por el CM(Fig. 4.7(z)). Momento de inercia: 3M(4a2 + h2)/80.
gira alrededor de un eje perpendicular al eje del cono y pasa por el vertice(Fig. 4.7(aa)). Momento de inercia: 3M(a2 + 4h2)/20.
13. Toroide de radio exterior a y radio interior b que:
gira alrededor de un eje que pasa por su CM y es perpendicular al planodel toroide (Fig. 4.7(bb)). Momento de inercia: M(7a2 − 6ab + 3b2)/4.
gira alrededor de un eje que pasa por su CM y esta en el plano del toroide(Fig. 4.7(cc)). Momento de inercia: M(9a2 − 10ab + 5b2)/4.
4.3. Ejemplos de Sistemas Traslacionales
Ejemplo 4.2 Sistema Mecanico Traslacional
En el sistema mostrado en la Fig. 4.8, K1, K2 y K3 son las constantes de los resortes,B es la constante de friccion y M1 y M2 son masas. (1) Determinar las ecuacionesque describen su dinamica. (2) Hallar los valores de equilibrio estatico x1e y x2e. (3)Use las relaciones x1 = x1e + y1 y x2 = x2e + y2 y formule el nuevo conjunto deecuaciones del sistema en funcion de y1 e y2. (4) Hallar el modelo de Lagrange cony = [y1 y2]
T . (5) Formular la ecuacion en el espacio de estado, siendo y1 e y2 lassalidas del sistema, y el vector de estado:
z = [z1 z2 z3 z4]T = [y1 y2 y1 y2]
T
(6) Hallar la matriz de transferencia G(s) del sistema. Asumir parametros de valorunidad. (7) determinar si el sistema es o no estable. (8) Escribir un programa paragraficar las respuestas y1(t) e y2(t) cuando la entrada fa(t) es un escalon unitario enun caso y un impulso unitario en el otro.

4.3 Ejemplos de Sistemas Traslacionales 95
a
ha
h ha
b
a
h
a
a
b
a
ba
h
a
h
(y) (z) (aa) (bb) (cc)
a
h
ha
b
a a
a
b
a
b
a
b
a
b
a
(o) (p)
aa
a
bc b
c
a
(w) (x)(u) (v)
aa
b
a
baa
cb
a
cb
(d)(c)(a) (b)
(g) (h)(f)(e)
h
b
a
(i) (j)
(m) (n)
(s) (t)
(k) (l)
(r)(q)
Fig. 4.7: Momentos de inercia especiales.

96 Modelado de Sistemas Lineales
¡¢ ££££¤¤¤¤
¥¥¦¦§§¨¨
K
M
M1
1
K
2
2 x 2
B/2 B/2K3
M 1
M 2
K1
1
x 1 M1x 1 K x 22
f aBx 2 M1
x
g f a K3 x 2
K2 x 2 B 2
M 2(x − x )21
K3x 2 M 2
¨
¨
.
¨
(a)¨ (b)¨ (c)¨
x.
g
Fig. 4.8: (a): Sistema mecanico traslacional del ejemplo 4.2. (b) y (c): Diagramas decuerpo libre.
Solucion: (1) De los diagramas de cuerpo libre podemos formular:
M1x1 + K1x1 − Bx2 − (K2 + K3)x2 = M1g + fa
M2x1 + M2x2 + Bx2 + (K2 + K3)x2 = M2g
(2) Los valores de equilibrio estatico se obtienen cuando todas las derivadas y fa sonnulas en la ecuacion anterior. Es decir:
K1x1e − (K2 + K3)x2e = M1g
Bx2e + (K2 + K3)x2e = M2g
Despejando:
x1e =(M1 + M2)g
K1x2e =
M2g
K2 + K3
(3) Luego de la sustitucion, las ecuaciones resultantes son:
M1y1 + K1y1 − By2 − (K2 + K3)y2 = fa
M2y1 + M2y2 + By2 + (K2 + K3)y2 = 0
(4) Reordenando convenientemente la ecuacion anterior se obtiene el modelo de La-grange:
My + Py + d = u[
M1 0M2 M2
] [y1
y2
]+
[0 −B0 B
] [y1
y2
]+
[K1y1 − (K2 + K3)y2
(K2 + K3)y2
]=
[fa
0
]

4.3 Ejemplos de Sistemas Traslacionales 97
(5) Empleando las variables de estado zi definidas en la pregunta (5), las ecuacionesde la respuesta (3) toman la forma:
M1z3 + K1z1 − Bz4 − (K2 + K3)z2 = fa
M2z3 + M2z4 + Bz4 + (K2 + K3)z2 = 0
De la primera ecuacion despejamos z3, resultando la tercera ecuacion de estado.La expresion de z3 la reemplazamos en la segunda ecuacion y luego despejamos z4,obteniendose la cuarta ecuacion de estado. La primera y segunda ecuaciones de estadoson z1 = z3 y z2 = z4 respectivamente. Con las salidas z1 y z2 y la fuerza de controldefinida como u = fa, la descripcion del sistema en el espacio de estado resulta:
z = Az + Bu w = Cz
z =
z1
z2
z3
z4
w =
[z1
z2
]C =
[1 0 0 00 1 0 0
]B =
001
M1
− 1M1
A =
0 0 1 00 0 0 1
−K1M1
K2+K3M1
0 BM1
K1M1
− (M1+M2)(K2+K3)M1M2
0 −M1+M2M1M2
Las respuestas a las preguntas (6), (7) y (8) se resuelven en el programa tr01.m y enla Fig. 4.9. Este programa devuelve la siguiente matriz de transferencia:
G(s) =
[s2+s+2
s4+2s3+5s2+s+2s2
s4+2s3+5s2+s+2
]
% tr01.m
clear all; close all; clc;
% PARAMETROS VALORADOS DEL SISTEMA
K1=1; K2=1; K3=1; M1=1; M2=1; B=1;
syms s ; % VARIABLE LAPLACIANA
A = [0 0 1 0;0 0 0 1;-K1/M1 (K2+K3)/M1 0 B/M1; ...
K1/M1 -(M1+M2)*(K2+K3)/(M1*M2) 0 -(M1+M2)/(M1*M2)];
B = [0;0;1/M1;-1/M1]; I = eye(4); C = [1 0 0 0;0 1 0 0]; D=[0;0];
G = C*inv(s*I-A)*B; pretty(simplify(G)) % MATRIZ DE TRANSFERENCIA
den = det(s*I-A); % den = s^4+2*s^3+5*s^2+s+2: ECUAC. CARACTERISTICA
raices = roots([1 2 5 1 2]); % DEVUELVE LAS RAICES DE den
% SISTEMA ESTABLE PORQUE LAS RAICES DE den POSEEN PARTE REAL NEGATIVA
% PROGRAMA PARA GRAFICAR z1(t) y z2(t)
z=[0 0 0 0]’; T=0.01; N=20000; % CONDICION INICIAL Y TIEMPO DE MUESTREO
for k = 1:N
u1=1; U1(k)=u1; % ENTRADA TIPO ESCALON
z = z + T*(A*z + B*u1); z1 = z(1); Z1(k)=z1; z2 = z(2); Z2(k)=z2;
end
t = linspace(0,T*N,N); subplot(211), plot(t,Z1,t,Z2),
title(’RESPUESTA AL ESCALON’); xlabel (’TIEMPO [s]’);
for k = 1:N

98 Modelado de Sistemas Lineales
if(k==1), u2=1; elseif(k >= 1), u2=0; end, U1(k)=u1; % ENTRADA IMPULSO
z = z + T*(A*z + B*u2); z1 = z(1); Z1(k)=z1; z2 = z(2); Z2(k)=z2;
end
subplot(212), plot(t,Z1,t,Z2), title(’RESPUESTA AL IMPULSO’),
xlabel (’TIEMPO [s]’), print -deps -f tr01r
0 50 100 150 200−1
0
1
2RESPUESTA AL ESCALÓN
TIEMPO [s]
0 50 100 150 200−1
−0.5
0
0.5
1RESPUESTA AL IMPULSO
TIEMPO [s]
z1(t)
z2(t)
z1(t)
z2(t)
Fig. 4.9: Respuestas al escalon y al impulso para el ejemplo 4.2.
Ejemplo 4.3 Sistemas Traslacional con Polea Ideal
En el sistema mostrado en la Fig. 4.10(a), K1 y K2 son las constantes de los resortes,B1 y B2 son las constantes de fricion y M1 y M2 son masas. (1) Determinar lasecuaciones que describen su dinamica. (2) Hallar los valores de equilibrio estatico x1e
y x2e. (3) Use las relaciones x1 = x1e +y1 y x2 = x2e +y2 y formule el nuevo conjuntode ecuaciones del sistema en funcion de y1 e y2. (4) Hallar el modelo de Lagrange cony = [y1 y2]
T . (5) Formular la ecuacion en el espacio de estado, siendo el vector deestado:
z = [z1 z2 z3 z4]T = [y1 y2 y1 y2]
T
y las senales de salida: y1 e y2. (6) Hallar la funcion de transferencia del sistema.Asumir parametros de valor unidad. (7) Determinar si el sistema es o no estable.(8) Escribir un programa para graficar las respuestas y1(t) e y2(t) cuando la entradafa(t) es un escalon unitario en un caso y un impulso unitario en el otro.

4.3 Ejemplos de Sistemas Traslacionales 99
1 21K (x − x )
©$©$©$©$©$©$©$©ª$ª$ª$ª$ª$ª$ª$ª
«$«$«$«¬$¬$¬$¬M 1
M 2
K1
K2 B
Polea ideal
f a
M 2
K2 x 2 B2 x 2. M2 g
M2 x 2¨
(a) (c)
f aM 1
1 2B1 x 1
.
M 1x
1K (x − x )
(b)
1x
x 2
B1
2
1
Fig. 4.10: (a): Sistema mecanico traslacional del ejemplo 4.3. (b) y (c): Diagramas decuerpo libre.
Solucion: (1) De los diagramas de cuerpo libre podemos formular:
M1x1 + B1x1 + K1(x1 − x2) = fa
M2x2 + B2x2 + K2x2 + M2g = K1(x1 − x2)
(2) Los valores de equilibrio estatico se obtienen cuando todas las derivadas y fa sonnulas en la ecuacion anterior. Es decir:
K1x1e − K1x2e = 0
K2x2e + M2g = 0
Despejando:
x1e = x2e = −M2g
K2
(3) Luego de la sustitucion, las ecuaciones resultantes son:
M1y1 + B1y1 + K1(y1 − y2) = fa
M2y2 + B2y2 + K2y2 − K1(y1 − y2) = 0
(4) Reordenando convenientemente la ecuacion anterior se obtiene el modelo de La-grange:
My + Py + d = u[
M1 00 M2
] [y1
y2
]+
[B 00 B
] [y1
y2
]+
[K1(y1 − y2)−K1(y1 − y2)
]=
[fa
0
]
(5) De las variables de estado zi: z1 = z3, z2 = z4. Las otras dos ecuaciones de estadose hallan despejando z3 = y1 y z4 = y2 de las ecuaciones dadas en la respuesta (3).
Con las salidas z1 y z2 y la fuerza de control definida como u = fa, la descripciondel sistema en el espacio de estado resulta:
z = Az + Bu y = Cz

100 Modelado de Sistemas Lineales
z =
z1
z2
z3
z4
y =
[z1
z2
]C =
[1 0 0 00 1 0 0
]B =
001
M1
0
A =
0 0 1 00 0 0 1
−K1M1
K1M1
− B1M1
0K1M2
−K1+K2M2
0 − B2M2
Las respuestas a las preguntas (6), (7) y (8) se resuelven en el programa tr02.m y enla Fig. 4.11. Este programa devuelve la siguiente matriz de transferencia:
G(s) =
[s2+s+2
s4+2s3+4s2+3s+11
s4+2s3+4s2+3s+1
]
% tr02.m SISTEMA TRASLACIONAL
clear all; close all; clc;
% PARAMETROS VALORADOS DEL SISTEMA
K1=1; K2=1; M1=1; M2=1; B1=1; B2=1; syms s; % VARIABLE LAPLACIANA
A = [0 0 1 0;0 0 0 1;-K1/M1 K1/M1 -B1/M1 0;K1/M2 -(K1+K2)/M2 0 -B2/M2];
B = [0;0;1/M1;0]; I = eye(4); C = [1 0 0 0;0 1 0 0]; D=[0;0];
G = C*inv(s*I-A)*B; pretty(simplify(G)) % MATRIZ DE TRANSFERENCIA
den = det(s*I-A); % den = s^4+2*s^3+4*s^2+3*s+1: ECUAC. CARACTERISTICA
raices = roots([1 2 4 3 1]); % DEVUELVE LAS RAICES DE den
% TODAS LAS RAICES POSEEN PARTE REAL NEGATIVA: SISTEMA ES ESTABLE.
% PROGRAMA PARA GRAFICAR z1(t) y z2(t)
z=[0 0 0 0]’; T=0.01; N=5000; % CONDICION INICIAL Y TIEMPO DE MUESTREO
for k = 1:N
u1=1; U1(k)=u1; % ENTRADA TIPO ESCALON
z = z + T*(A*z + B*u1); z1 = z(1); Z1(k)=z1; z2 = z(2); Z2(k)=z2;
end
t = linspace(0,T*N,N);
subplot(211), plot(t,Z1,t,Z2), xlabel (’TIEMPO [s]’),
title(’RESPUESTA AL ESCALON’),
for k = 1:N
if(k==1), u2=1; elseif(k >= 1), u2=0; end; U1(k)=u1; % ENTRADA IMPULSO
z = z + T*(A*z + B*u2); z1 = z(1); Z1(k)=z1; z2 = z(2); Z2(k)=z2;
end
subplot(212), plot(t,Z1,t,Z2), title(’RESPUESTA AL IMPULSO’),
xlabel (’TIEMPO [s]’), print -deps -f tr02r
Ejemplo 4.4 Faja de Transporte con Tiempo Muerto
La Fig. 4.12 muestra una faja transportando granos. Observar que en el intervalo t0hasta t1, el flujo de granos y0 es producido por la abertura u0 de la valvula de cuchilla.En el tiempo t1 se incrementa la abertura de la valvula en un ∆u, lo cual se traduce enun incremento del flujo en un ∆y, solo cuando dicho incremento recorra la distanciaL. Sabemos que la faja se mueve a una velocidad constante v. Por consiguiente, eltiempo muerto que demora el flujo ∆y en recorrer L es:
Tt =L
v

4.4 Ejemplos de Sistemas Rotacionales 101
0 10 20 30 40 500
1
2
3RESPUESTA AL ESCALÓN
TIEMPO [s]
0 10 20 30 40 50−1
0
1
2RESPUESTA AL IMPULSO
TIEMPO [s]
z1
z2
z1
z2
Fig. 4.11: Respuestas al escalon y al impulso para el ejemplo 4.3.
La FT de este sistema resulta entonces:
y(s)
u(s)= Kpe
−Tts Kp =∆y
∆u
®®¯°±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±
²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²
³³³³³´´´´´
Velocidad wconstante
r
u + u
L
v = wr u
Válvla decuchilla
Motor
u
u(t)
u
y(t)
yo
o
t t
tt
1
1
Tt
t
t
y
0
0
Fig. 4.12: Faja de transporte con tiempo muerto.
4.4. Ejemplos de Sistemas Rotacionales
Ejemplo 4.5 Sistema Mecanico Rotacional
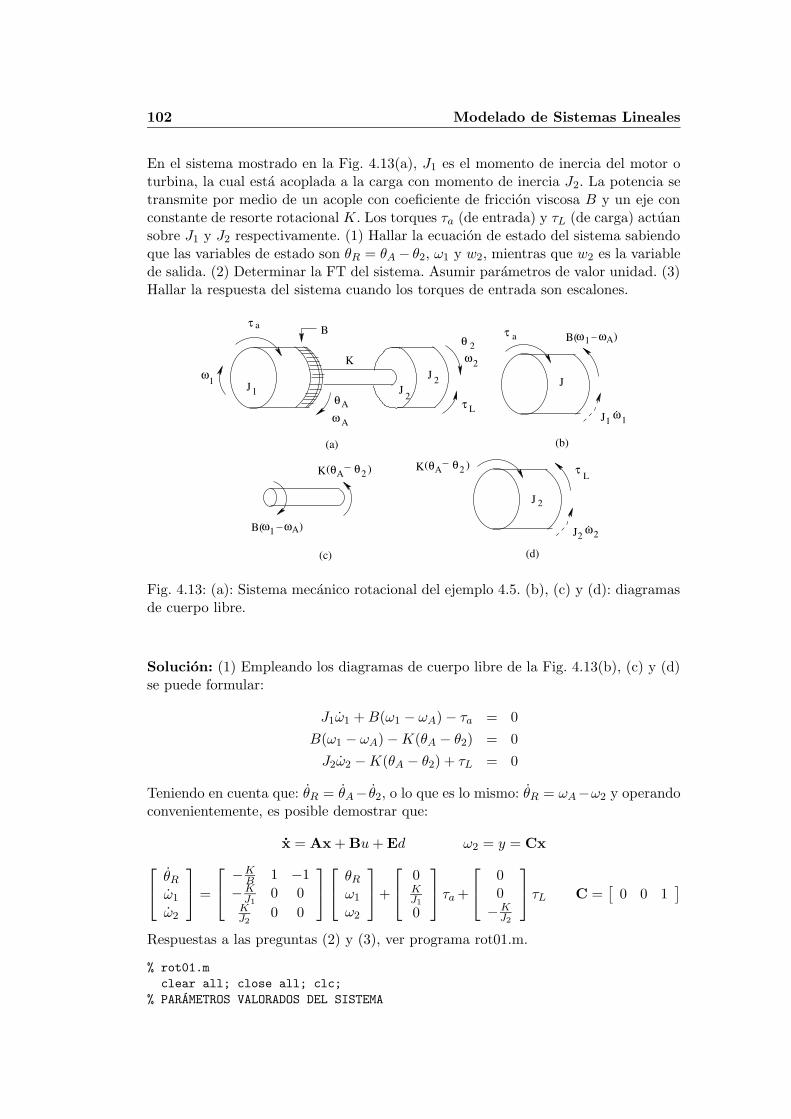
102 Modelado de Sistemas Lineales
En el sistema mostrado en la Fig. 4.13(a), J1 es el momento de inercia del motor oturbina, la cual esta acoplada a la carga con momento de inercia J2. La potencia setransmite por medio de un acople con coeficiente de friccion viscosa B y un eje conconstante de resorte rotacional K. Los torques τa (de entrada) y τL (de carga) actuansobre J1 y J2 respectivamente. (1) Hallar la ecuacion de estado del sistema sabiendoque las variables de estado son θR = θA − θ2, ω1 y w2, mientras que w2 es la variablede salida. (2) Determinar la FT del sistema. Asumir parametros de valor unidad. (3)Hallar la respuesta del sistema cuando los torques de entrada son escalones.
B(ω )ωA
1B(ω )A
(c)
K(θA θ2 )
ω
K
J1 J 2
Bτ a
ω1
θA
A
θ 2ω2
τ L
(a) (b)
ω
τ a
J ω1
1
.
JJ 2
J ω.
τ L
2
(d)
2
J 2
K(θA θ2 )
1
Fig. 4.13: (a): Sistema mecanico rotacional del ejemplo 4.5. (b), (c) y (d): diagramasde cuerpo libre.
Solucion: (1) Empleando los diagramas de cuerpo libre de la Fig. 4.13(b), (c) y (d)se puede formular:
J1ω1 + B(ω1 − ωA) − τa = 0
B(ω1 − ωA) − K(θA − θ2) = 0
J2ω2 − K(θA − θ2) + τL = 0
Teniendo en cuenta que: θR = θA− θ2, o lo que es lo mismo: θR = ωA−ω2 y operandoconvenientemente, es posible demostrar que:
x = Ax + Bu + Ed ω2 = y = Cx
θR
ω1
ω2
=
−KB 1 −1
−KJ1
0 0KJ2
0 0
θR
ω1
ω2
+
0KJ1
0
τa +
00
−KJ2
τL C =
[0 0 1
]
Respuestas a las preguntas (2) y (3), ver programa rot01.m.
% rot01.m
clear all; close all; clc;
% PARAMETROS VALORADOS DEL SISTEMA

4.4 Ejemplos de Sistemas Rotacionales 103
K=1; J1=1; J2=1; B=1; B2=1; syms s ; % VARIABLE LAPLACIANA
AA = [-K/B 1 -1;-K/J1 0 0;K/J2 0 0];
BB = [0;-K/J1;0]; E = [0;0;-K/J2]; I = eye(3); C = [0 0 1];
Gp = C*inv(s*I-AA)*BB; pretty(simplify(Gp)) % FT PLANTA
Gd = C*inv(s*I-AA)*E; pretty(simplify(Gd)) % FT DISTURBIO
% y(s)=Gp(s)taua+G2(s)tauL; Gp(s)=1/(s(s^2+s+2)); Gd(s) = -1/s
% PROGRAMA PARA GRAFICAR w2
x = [0 0 0]’; T = 0.01; N = 5000; % CONDICION INICIAL Y MUESTREO
for k = 1:N
u=1; d=1; % u=taua; d = tauL; y = w2;
x = x + T*(AA*x + BB*u + E*d); y = x(3); Y(k)=y;
end
t = linspace(0,T*N,N); plot(t,Y),
title(’RESPUESTA A LOS ESCALONES u y d’), xlabel(’TIEMPO [s]’),
ylabel(’w2(t)’), print -deps -f rot01r
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9RESPUESTA A LOS ESCALONES u y d
TIEMPO [s]
w2(t)
Fig. 4.14: Respuesta a los escalones para el ejemplo 4.5.
Ejemplo 4.6 Sistema Rotacional con Palanca
En el sistema mostrado en la Fig. 4.15(a), M es la masa del bloque, K1 y K2 son lasconstantes de los resortes, B es la constante de friccion, d1 + d2 es la longitud de labarra sin peso que gira en el punto pivote, y x4 es la posicion de entrada. (1) Formularlas ecuaciones que gobiernan el sistema en funcion de la posicion x1, la velocidad v1
del bloque de masa M , y de los otros parametros, los cuales se consideran conocidos.(2) Seleccione como variables de estado x1 y v1 y determine la ecuacion de estadodel sistema. (3) Graficar la respuesta fr a una entrada x4 tipo escalon. (4) Graficarla respuesta fr a una entrada x4 tipo sinusoide.
Solucion: (1) Empleando la Fig. 4.15(b):
Mv1 + Bv1 + K1(x1 + x2) = 0 v1 =dx1
dt= x1

104 Modelado de Sistemas Lineales
x 1
x 2
2d
d 1
µ¶µ¶µ¶µ¶µµ¶µ¶µ¶µ¶µ·¶·¶·¶··¶·¶·¶·M
K1
1xd 2
1
M
1vB
Mv1
(b)
d
d
1
2f r
K (x − x )2
(c)(a)
B
x
x3
4
θ
4 3
.
x 2
1 21K (x − x )
1 21K (x − x )
d
2K
Fig. 4.15: (a) Sistema mecanico rotacional del ejemplo 4.6. (b) y (c) Diagramas decuerpo libre.
De la Fig. 4.15(a) observamos que: θ = x2/d2 = x3/d1. Por lo tanto: x3 = (d1/d2)x2.La suma de momentos alrededor del punto pivote en la Fig. 4.15(c) es cero, esto es:
K2(x4 − x3)d1 − K1(x1 + x2)d2 = 0
Por consiguiente, se puede hallar que:
x2 =(d1/d2)K2x4 − K1x1
K1 + (d1/d2)2K2
(2) Con la informacion anterior es facil demostrar que la ecuacion de estado resulta:
x = Ax + Bu
[x1
v1
]=
[0 1
−αK1M − B
M
] [x1
v1
]+
[0
−αd2K1Md1
]x4 α =
1
1 + K1K2
(d2d1
)2
De la Fig. 4.15(c) tambien se obtiene:
fr = K2(x4 − x3) + K1(x1 + x2)
Respuestas a las preguntas (3) y (4), ver programa rot02.m.
% rot02.m
clear all; close all; clc;
% PARAMETROS VALORADOS DEL SISTEMA
K1=1; K2=1; B=1; d1=1; d2=1; M=1; alfa=1/(1+(K1/K2)*(d2/d1)^2);
A = [0 1;-alfa*K1/M -B/M]; B = [0;-alfa*d2*K1/(M*d1)];
% PROGRAMA PARA GRAFICAR fr
x = [0 0]’; T = 0.01; N = 5000;
for k = 1:N
x4 = 1; U1(k) = x4; % ENTRADA ESCALON
x = x + T*(A*x + B*x4); x1=x(1);
x2 = (d1/d2)*K2*x4-K1*x1/(K1+(d1/d2)^2*K2); x3 = (d1/d2)*x2;
fr = K2*(x4-x3) + K1*(x1-x2); Y1(k)=fr; end

4.5 Ejemplos de Sistemas Electromecanicos 105
for k = 1:N
x4 = sin(k*T); U2(k) = x4; % ENTRADA SENOIDAL
x = x + T*(A*x + B*x4); x1=x(1);
x2 = (d1/d2)*K2*x4-K1*x1/(K1+(d1/d2)^2*K2); x3 = (d1/d2)*x2;
fr = K2*(x4-x3) + K1*(x1-x2); Y2(k)=fr; end
t = linspace(0,T*N,N); subplot(211), plot(t,Y1), ylabel(’fr(t)’)
title(’RESPUESTA AL ESCALON’), xlabel(’TIEMPO [s]’);
subplot(212), plot(t,Y2), title(’RESPUESTA A LA SINUSOIDE’),
xlabel(’TIEMPO [s]’), ylabel(’fr(t)’), print -deps -f rot02r
0 5 10 15 20 25 30 35 40 45 50−3.5
−3
−2.5
−2
−1.5
−1RESPUESTA AL ESCALÓN
TIEMPO [s]
fr(t)
0 5 10 15 20 25 30 35 40 45 50−3
−2
−1
0
1
2RESPUESTA A LA SINUSOIDE
TIEMPO [s]
fr(t)
Fig. 4.16: Respuestas al escalon y a la sinusoide para el ejemplo 4.6.
4.5. Ejemplos de Sistemas Electromecanicos
Ejemplo 4.7 Indicador con Nucleo de Fierro Movil
La Fig. 4.17 muestra un indicador con nucleo de fierro movil, donde K es la constantedel resorte, B es la constante de viscocidad del amortiguador, M es la masa del nucleode fierro encerrado por la bobina, y u es la corriente que circula por la bobina. Lafuerza electromagnetica Kmu producida por u produce un movimiento y en el nucleo,cuya direccion y magnitud depende de la direccion y magnitud de la corriente u. Elmovimiento y, que es tambien el desplazamiento del indicador, es proporcional a lacorriente u. La ecuacion que gobierna el movimiento del nucleo es:
Kmu = Ky + Bdy
dt+ M
d2y
dt2

106 Modelado de Sistemas Lineales
En el dominio de Laplace y con condiciones iniciales nulas, la ecuacion anterior re-sulta:
Kmu(s) = Ky(s) + Bsy(s) + Ms2y(s)
La FT y(s)/u(s) toma la forma:
y(s)
u(s)=
KmM
s2 + BM s + K
M
=Kp
s2 + 2ζωns + ω2n
Kp =Km
Mζ =
B
2√
KMωn =
√K
M
t
t
u
y
BAmortiguador
KResorte
BobinaM
Corriente
u
y
u o u
yoy
Escala
uo
yo
Fig. 4.17: Sistema indicador con nucleo de fierro movil.
Ejemplo 4.8 Circuito con Opamps
La Fig. 4.18 muestra un seguidor de voltaje y dos amplificadores operacionales(opamps) inversores conectados en cascada. La ganancia del seguidor de voltaje esuno. Las ganancias de los amplificadores son respectivamente:
Vx(s)
Vi(s)= −
1sC1
R1 + 1sC1
Vo(s)
Vx(s)= −
1sC2
R2 + 1sC2
Este sistema es de segundo orden porque:
Vo(s)
Vi(s)=
1
(R1C1s + 1)(R2C2s + 1)
Ejemplo 4.9 Motor de Corriente Continua (Motor DC)

4.5 Ejemplos de Sistemas Electromecanicos 107
Vo
Seguidor de voltaje Opampinversor inversor
Opamp
R RC
C C
C1 1
2
22
Vx
1
ViVi
Fig. 4.18: Sistema de segundo orden con opamps.
La Fig. 4.19(a) muestra el circuito equivalente de un motor DC (direct current),donde Rf , Lf , If y Vf son la resistencia, la inductancia, la corriente y el voltaje decampo respectivamente, Ra, La, Ia y Va son la resistencia, la inductancia, la corrientey el voltaje de armadura respectivamente, Tm, TL y Td son el torque motor, el torquede carga y el torque de disturbio respectivamente, Km es la constante de motor, Kb
es la constante contraelectromotriz, ω es la velocidad angular, θ es la posicion angulardel eje, J es el momento de inercia del motor mas carga y B es la constante de fricciondel motor mas carga.
Motor DC Controlado por el Campo
Cuando el motor DC esta controlado por el campo, entonces la corriente de campoIf es variable, mientras que la corriente de armadura Ia permanece constante. Lasecuaciones en el dominio de Laplace que rigen la dinamica del motor CC en este casoson:
Vf (s) = (Rf + Lfs)If (s)
Tm(s) = KmIf (s) = TL(s) + Td(s)
TL(s) = Jsω(s) + Bω(s) ω(s) = sθ(s)
El diagrama de bloques para este caso se muestra en la Fig. 4.19(b). Considerandoque el torque de disturbio Td es despreciable, la FT resulta:
Gp(s) =θ(s)
Vf (s)=
Km
s(Js + B)(Lfs + Rf )
Si la inductancia de campo Lf es suficientemente pequena, entonces la FT toma laforma:
Gp(s) =θ(s)
Vf (s)∼= K
s(τs + 1)τ =
J
BK =
Km
RfB
Motor DC Controlado por la Armadura
Si el motor DC esta controlado por la armadura, entonces la corriente de armadu-ra Ia es variable, mientras que la corriente de campo If permanece constante. Lasecuaciones en el dominio de Laplace que rigen la dinamica del motor DC en este caso

108 Modelado de Sistemas Lineales
mK
mK 1s
θω1
J
Kb
Bs
V
I
L
a
a
a
Ra
ωθ
BJ
R
LV
I
f
f
f f
(a)
(b)
(c)
R f Lf s1 1
s
θω1
J s
Vf
TdT
LTm
Campo
B
cargaMotor más
Motor máscarga
V
bV
b
fI
LT
TArmadura
VaRa Las
1I m mTd
Fig. 4.19: (a) Circuito equivalente del motor DC. (b) Motor DC controlado por campo.(c) Motor DC controlado por armadura.
son:
Va(s) = (Ra + Las)Ia(s) + Vb(s) Vb(s) = Kbω(s)
Tm(s) = KmIa(s) = TL(s) + Td(s)
TL(s) = Jsω(s) + Bω(s) ω(s) = sθ(s)
El diagrama de bloques para esta situacion se muestra en la Fig. 4.19(c). Asumiendoque el torque de disturbio Td es despreciable, la FT resulta:
Gp(s) =θ(s)
Va(s)=
Km
s[(Ra + Las)(Js + B) + KbKm]
Si la inductancia de campo La es suficientemente pequena,entonces la FT toma laforma:
Gp(s) =θ(s)
Va(s)∼= K
s(τs + 1)K =
Km
RaB + KbKmτ =
RaJ
RaB + KbKm
Notar que tanto para el motor controlado por campo como por armadura, la FTposee la misma estructura cuando se desprecia ya sea Lf o La. En ingenierıa decontrol se emplea mas el motor CC controlado por armadura debido a la inherenterealimentacion que presenta el motor en este caso.

4.5 Ejemplos de Sistemas Electromecanicos 109
Modelo del Motor DC en el Espacio de Estado
Seleccionemos x1 = θ y x2 = θ como las variables de estado del motor, y = θ comola salida del sistema y u = Va o Vf como la senal de entrada. La primera ecuacion deestado resulta: x1 = x2. Formulemos la FT del motor:
θ(s)
Va(s)∼= K
τs2 + s
Multiplicando en cruz y pasando del dominio de s al dominio de t, se obtiene:
τ θ + θ = KVa =⇒ θ = −1
τθ +
K
τu =⇒ x2 = −1
τx2 +
K
τu
Por consiguiente, el modelo en el espacio de estado queda como:
x = Ax + Bu y = Cx
[x1
x2
]=
[0 10 − 1
τ
]+
[0Kτ
]u y =
[1 0
] [ x1
x2
]
Ejemplo 4.10 Ejercicio con Motor DC
La Fig. 4.20(a) muestra un motor de DC controlado por corriente de armadura yacoplada a una carga mediante un amortiguador rotacional de constante dR conectadoen paralelo con un resorte rotacional de constante cR. Asumir que las perdidas enel motor y la carga son despreciables y que no existen disturbios. Se pide construirel diagrama de bloques que tenga como entrada la tension de armadura Va y comosalida la posicion angular θ.
Solucion: Las siguientes ecuaciones corresponden al caso que nos ocupa:
Va(s) = (Ra + Las)Ia(s) + Vb(s) Vb(s) = Kbωm(s)
Tm(s) = KmIa(s) = Jmsω(s)
Mc(t) = cR
∫(ωm − ω)dt → Mc(s) =
ωm − ω
s
Md(s) = dR(ωm − ω)
TL(s) = Mc(s) + Md(s) = JLsω(s) ω(s) = sθ(s)
La Fig. 4.20(b) muestra el diagrama de bloques construido con las ecuaciones ante-riores.
Ejemplo 4.11 Sistema de Despegue y Aterrizaje (SDA)
La Fig. 4.21 muestra el esquema del sistema de despegue y aterrizaje SDA, dondeLh = 28.4 cm es la longitud total de la barra que sostiene tanto al contrapeso comoal rotor, L1 = 15.6 cm es la distancia entre el centro de masa del rotor y el puntopivote, L2 = 5.6 cm es la distancia entre el centro de masa del contrapeso y el puntopivote, Lcm = Lh
2 − L2 es la distancia entre el centro de masa del soporte y el puntopivote, m1 = 0.068 kg es la masa del rotor, m2 = 0.048 kg es la masa del contrapeso,mh = 0.27 kg es la masa del soporte y g es la constante de la gravedad. Ademas,

110 Modelado de Sistemas Lineales
V
L
a
aRa
Vb
R
V
I
f
f
f f
= constante
mJ
c R
TmR L sa a
Armadura
1mK
Inerciadel motor
aV
Jm s
ωm s
c R
d R
J Ls
1 1
s
ω θ
(b)
Inerciade la cargaMc
M d
L
Kb
TL
LI a
m
ω mmθ
T
d R
TL
θω
J
(a)
Fig. 4.20: (a) Motor del ejemplo 4.10 acoplado a una carga. (b) Diagrama de bloques.
¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸¸
¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹
1
m1
Ft
cm
Puntopivote
L
m
Rotor
L h
soporteBarra
L
θ > 0
hg
g
2L
Contrapesog2
m
Fig. 4.21: Sistema de despegue y aterrizaje.
m1g, m2g y mhg son los pesos del rotor, contrapeso y soporte, respectivamente, y Ft
es la fuerza generada por el rotor y actua perpendicularmente al ventilador. El rotorcomprende un servomotor DC que acciona un ventilador. Aplicando momentos conrespecto al punto pivote:
τt + m2L2gcosθ − m1gL1cosθ − mhgLcmcosθ = 0 Lcm =Lh
2− L2 (4.7)

4.6 Ejemplo de Sistemas Hidraulicos 111
donde el torque producido por Ft viene dado por:
τt = FtL1 (4.8)
En funcion de la corriente Im producida por el servomotor que acciona al ventilador,τt toma la forma:
τt = KtIm (4.9)
donde Kt = es la constante del servomotor e Im es la corriente del motor. El sistemaSDA estara en equilibrio cuando se encuentre en forma horizontal. En esta situacion,el torque resultante actuando sobre el sistema es nulo y ocurre cuando la corrienteIm toma el valor de equilibrio Ieq. Entonces, la ecuacion (4.7) toma la forma:
KtIeq + m2L2gcosθ − m1gL1cosθ − mhgLcmcosθ = 0 Lcm =Lh
2− L2 (4.10)
El movimiento rotacional del sistema SDA se formula como:
Jd2θ
dt2+ B
dθ
dt+ Kθ = τt = KtIm (4.11)
donde B = 0.002 N–m/(rad/s) es el coeficiente de friccion viscosa, K es la rigidezrotacional y J es el momento de inercia del sistema, el cual, asumiendo que las masasse concentran en sus centros de masa, se determina como:
J = m1L21 + m2L
22 + mhL2
cm
La FT θ(s)/Im(s) se deduce de (4.11):
θ(s)
Im(s)=
Kt
K×
KJ
s2 + BsJ + K
J
=Kt
K× ω2
n
s2 + 2ζωns + ω2n
(4.12)
Notar que tal FT ha sido igualada al modelo de un sistema de segundo orden sub-amortiguado con frecuencia natural de oscilacion ω2
n y coeficiente de amortiguamientoζ:
ω2n =
K
Jζ =
B
2Jωn(4.13)
4.6. Ejemplo de Sistemas Hidraulicos
Ejemplo 4.12 Flujo en una Tuberıa
La Fig. 4.22(a) muestra un tramo de tuberıa seccion uniforme por donde circula unflujo y, cuya magnitud esta gobernada por la abertura u de la valvula de control. Lasletras FI (Flow Indication) dentro del cırculo indican la presencia de un instrumentode indicacion de flujo.
La respuesta al escalon (su curva de reaccion a lazo abierto) del sistema flujose ilustra en la Fig. 4.22(b). Considerese que para un tiempo t1, el flujo que pasapor la valvula es y1 = A1vρ, donde A1 es la seccion transversal correspondiente a laabertura u1 de la valvula, v es la velocidad del flujo considerada constante y ρ es ladensidad lıquido, tambien considerada constante. Para un tiempo t2, incrementamos

112 Modelado de Sistemas Lineales
la abertura de la valvula de u1 a u2. Consecuentemente, el flujo aumenta de y1 a y2 =A2vρ, sin experimentar retardo, donde A2 es la seccion transversal correspondientea la abertura u2. La ganancia proporcional del sistema flujo es entonces:
Kp =∆y
∆u=
y2 − y1
u2 − u1(4.14)
En el dominio de Laplace, la expresion generica de la FT del sistema flujo toma laforma:
y(s) = Kp u(s) (4.15)
donde s es el operador de Laplace.
y tt 1
t t 21
y
u
1
u
2
1
u
y
∆
∆
t
t
FIu
2
(b)
Válvulade control
(a)
u
2yy
Fig. 4.22: (a) Sistema flujo. (b) Respuesta al escalon (curva de reaccion a lazo abierto)del proceso flujo.
A manera de ejemplo de calculo se desea determinar la ganancia proporcional delsistema flujo mostrado en la Fig. 4.22(a), sabiendo que el recorrido total de la valvulaes de 10 mm y que el maximo flujo que puede pasar por la tuberıa es de 10 L/min(L: litro). Asumir que el cambio de flujo ∆y a traves de la valvula es proporcional alcambio de abertura de valvula ∆u. Es decir: ∆y = Kp∆u.
Empleando la ecuacion (4.14), la ganancia Kp se calcula como:
Kp =∆y
∆u=
y2 − y1
u2 − u1=
10 − 0
10 − 0= 1
L
min mm♣
Ejemplo 4.13 Tanques Hidraulicos
En el sistema hidraulico mostrado en la Fig. 4.23, q1, q2, q3, q4, Q1 y Q2 sonflujos de agua, Rh1, Rh2, Rh3 Rh4 son resistencias hidraulicas, h1, h2 y h3 son niveles,mientras que P1, P2, P3 y Po son presiones. Determinar las ecuaciones de estado y desalida del sistema. Seleccionar como variables de estado los niveles h1, h2 y h3, comoentradas los flujos Q1 y Q2 y como salidas los flujos q1, q3 y q4.
Solucion: Las relaciones que rigen la dinamica del sistema son:
P1 − Po = ρgh1 = Rh1q1 P1 − P2 = ρg(h1 − h2) = Rh2q2
P2 − Po = ρgh2 = Rh3q3 P3 − Po = ρgh3 = Rh4q4

4.6 Ejemplo de Sistemas Hidraulicos 113
h 3
q
q
q1
2
3
Q Q1 2
Q1 Q2
R R Rh h h1 2 3h 1
Ph 2
P
oP
1 2
P3
q 4Rh 4
Fig. 4.23: Sistema hidraulico del ejemplo 4.13.
A1dh1
dt= A1h1 = Q1 + Q2 − q1 − q2
A2dh1
dt= A2h2 = Q1 + Q2 − q2 − q3
A3dh1
dt= A3h3 = q1 + q3 − q4
donde ρ es la densidad del agua, γ = ρg es el peso especıfico del agua, y A1, A2 y A3
son las secciones uniformes de los tanques. Operando convenientemente, se llega a lasiguiente descripcion:
h1
h2
h3
=
− γA1
(1
Rh1+ 1
Rh2
)γ
A2Rh20
γA2Rh2
− γA2
(1
Rh2+ 1
Rh3
)0
γA3Rh1
γA3Rh3
− γA3Rh4
h1
h2
h3
+
2A1
2A1
2A2
2A2
0 0
[
Q1
Q2
]
q1
q2
q3
=
γRh1
0 0
0 γRh3
0
0 0 γRh4
h1
h2
h3
Flujos en Tuberıas con Tiempo Muerto
La Fig. 4.24 muestra dos flujos y1(t) e y2(t) que circulan por dos tuberıas queluego se juntan en una sola, en la cual se ha instalado un sensor de PH. En la tuberıacomun de longitud L, el flujo suma y(t) = y1(t) + y2(t) circula a una velocidad v.Hasta el tiempo t1, las aberturas de valvulas [u1]o y [u2]o dejan circular un flujo de yo.En el tiempo t1 se incrementan las aberturas de las valvulas en un ∆u1(t) y ∆u2(t),respectivamente, lo cual se traduce en un incremento del flujo total en un ∆y(t). Esteincremento de flujo debe de recorrer una distancia L para que sea detectado por el

114 Modelado de Sistemas Lineales
sensor de PH. Por lo tanto, el tiempo muerto que demora el flujo ∆y(t) en recorrerL es:
Tt =L
v
La FT de este proceso toma la forma:
y(s)
u1(s)= Kpe
−Tts Kp =∆y
∆u1 + ∆u2
Sensor de PH
L
Flujo y(t) auna velocidad
v constante
Flujo u (t)1
Flujo u (t)2
u (t)
t[u ]o2
2
ty
y(t)y(t)
u (t)2
u (t)1t
[u ]o1
u (t)1
Tt
o
Fig. 4.24: Flujos en tuberıas con tiempo muerto.
4.7. Ejemplos de Sistemas Termicos
Ejemplo 4.14 Temperatura en un Tanque con Agitador
La Fig. 4.25 muestra un sistema termico: temperatura en un tanque con agitador.A este tanque ingresa un flujo q a una temperatura Ti y sale el mismo flujo q pero a unatemperatura To. Asumiendo cero perdidas se va a demostrar que la FT Ti(s)/To(s)es de primer orden. La Tabla 4.2 describe las variables y parametros en juego.
Ti
q
T
q
Fig. 4.25: Sistema temperatura en un tanque con agitador.

4.7 Ejemplos de Sistemas Termicos 115
Tabla 4.2: Parametros y variables del sistema temperatura en un tanque con agitador.
Sımbolo Descripcion Unidades
q Flujo de entrada y de salida m3/s
ρ Densidad del lıquido en q kg/m3
Cp Capacidad calorıfica a presion constante Jkg K
Cv Capacidad calorıfica a volumen constante Jkg K
V Volumen del lıquido en el tanque m3
Ti Temperatura del flujo de entrada oC
To Temperatura del flujo de salida oC
Asumiendo que el lıquido en el tanque se agita uniformemente, que los flujosvolumetricos de entrada y de salida, la densidad y capacidad calorıfica del lıquidoson todos constantes, y que el sistema es adiabatico (sin perdidas) debido a que eltanque posee buen aislamiento, entonces, la ecuacion del balance de energıa es:
qρCpTi − qρCpTo = V ρCvdTo
dt(4.16)
En el dominio de Laplace s, (4.16) resulta:
qρCpTi(s) − qρCpTo(s) = V ρCv (sTo − To(0))
Sabemos que la determinacion de la FT de cualquier sistema requiere que todas lascondiciones iniciales sean nulas. En el caso que nos ocupa, tal requerimiento se cumplesi: To(0) = 0. Por lo tanto, su correspondiente FT Ti(s)/To(s) resulta:
To(s)
Ti(s)=
1
τs + 1τ =
V Cv
qCp(4.17)
La curva de reaccion del sistema con Ti(s) = A/s posee la forma:
To(t) = A (1 − e−tτ )
la cual se halla ejecutando el programa en matematica simbolica temp1simb.m, dondetau = τ :
% temp1simb.m DETRMINACION DE To(t) USANDO TRANSFORMADA INVERSA DE LAPLACE
clear all; close all; clc; syms s tau A;
To = ilaplace(A/(s*(tau*s+1))); pretty(simplify(To))
Ejemplo 4.15 Sistema Termico
En el sistema termico mostrado en la Fig. 4.26, C1, C2 y C3 son capacitancias termi-cas, R1, R2 y R3 son resistencia termicas, T1, T2 y T3 son temperaturas, mientrasque qo, q1 y q2 son flujos termicos. (1) Determinar las ecuaciones que describen su

116 Modelado de Sistemas Lineales
dinamica. (2) Formular la ecuacion en el espacio de estado, siendo la entrada el flujoq0, el vector de estado:
T = [T1 T2 T3]T
y q3 la salida. (3) Hallar la matriz de transferencia del sistema. (4) determinar si elsistema es o no estable. Asumir parametros de valor unidad. (4) Escribir un programapara graficar la respuestas q3(t) cuando la entrada q0(t) es un escalon unitario en uncaso y un impulso unitario en el otro.
C
C
RRR
q
q q
q 0
2
1
3
3
3
1 C2
1
2
2
3
1T T
T
Fig. 4.26: Sistema termico del ejemplo 4.15.
Solucion: (1) Las ecuaciones pedidas son:
C1dT1
dt= q0 − q1 − q2 C2
dT2
dt= q1 − q3 C3
dT3
dt= q2 + q3
q1 =1
R1(T1 − T2) q2 =
1
R2(T1 − T3) q3 =
1
R3(T2 − T3)
(2) Manipulando convenientemente las ecuaciones anteriores, las ecuaciones en elespacio de estado resultan:
dT
dt= AT + Bq0
dT1dt
dT2dt
dT3dt
=
− 1C1R1
− 1C1R2
1C1R1
1C1R2
1C2R1
− 1C2R1
− 1C2R3
1C2R3
1C3R2
1C3R3
− 1C3R2
− 1C3R3
T1
T2
T3
+
1C1
0
0
q0
q3 = CT = [0 1/R3 − 1/R3]T
Ejemplo 4.16 Horno Electrico
En el horno electrico mostrado en la Fig. 4.27, θ es la temperatura dentro del horno,θa es la temperatura exterior al horno, F es la superficie media exterior, d es el anchode las paredes aislantes, α es el coeficiente de transmision de calor del aislante, mes la masa del cuerpo calentado y c es el calor especıfico de m. Determine la FT∆θ(s)/Qe(s) donde ∆θ(s) = θ(s) − θa(s). sistema

4.7 Ejemplos de Sistemas Termicos 117
m, c
dθ
αθ a
Sensor
Calefactor
Fig. 4.27: Horno electrico del ejemplo 4.17.
Solucion: Por la ley de la conservacion de la energıa:
Qe = Qm + Qa = cmd∆θ
dt+ Fα∆θ/d
donde Qe es el flujo de calor entregado por el calefactor, Qm = cmd∆θdt es el flujo de
calor absorbido por la masa m y Qa = Fα∆θ/d es el flujo de calor que se pierde porlas paredes. Pasando al dominio de Laplace, la relacion anterior queda como:
Qe(s) = cms∆θ(s) + Fα∆θ(s)/d
∆θ(s)
Qe(s)=
1Fα
1 + cdmFα s
=K
Ts + 1
El resultado es un sistema de primer orden de ganancia K y constante de tiempo T .
Ejemplo 4.17 Proceso de Enfriamiento
En la Fig. 4.28(a), Qc es el flujo de agua a una temperatura Tc que ingresa a la camisade enfriamiento del tanque, con el proposito de enfriar el flujo q constante que ingresaal tanque a una temperatura Ti. Este flujo abandona el tanque por desborde a unatemperatura T . La pared metalica del tanque se encuentra a una temperatura Tm.El modelo de este proceso fue extraıdo de [?]. La Tabla 4.3 muestra las variables yparametros del proceso.
El balance de energıa en el flujo que se procesa se expresa como:
qρCpTi − hiAiT + hiAiTm − qρCpT = V ρCvdT
dt(4.18)
La ecuacion (4.18) tambien es valida para el estado estacionario:
qρCpT i − hiAiT + hiAiTm − qρCpT = V ρCvdT
dt(4.19)
Restando (4.19) de (4.18) y teniendo en cuenta que ti = Ti − T i, tm = Tm − Tm yt = T − T , entonces el modelo lineal residual de (4.18) resulta:
qρCpti − hiAit + hiAitm − qρCpt = V ρCvdt
dt(4.20)

118 Modelado de Sistemas Lineales
ci
i
q c
t
t
t
t
t
TC
Camisa deenfriamiento
Tanque metálico
Producto
Agua fríaq
ρC
TC
iT
qT
q
Rebose
ρ(a)
(b)
1s+1τ
1s+1τ
1s+1τ
K
K
1
2
3K
4K5K
6K
7K
123
C
m
c
Tm
Fig. 4.28: Proceso de enfriamiento.
Pasando (4.20) al dominio de Laplace y operando, se obtiene:
t(s) =K1
τ1s + 1ti(s) +
K2
τ1s + 1tm(s) (4.21)
K1 =qρCp
qρCp + hiAiK2 =
hiA − i
qρCp + hiAiτ1 =
V ρCp
qρCp + hiAi
El balance de energıa para la pared del tanque se formula como:
hiAi(T − Tm) − hoAo(Tm − Tc) = VmρmCVm
dTm
dt(4.22)
Como en el caso anterior y sabiendo que tc = Tc − T c, se encuentra:
hiAi(t − tm) − hoAo(tm − tc) = VmρmCVm
dtmdt
tm(s) =K3
τ2s + 1t(s) +
K4
τ2s + 1tc(s) (4.23)
K3 =hiAi
hiAi + hoAoK4 =
hoAo
hiAi + hoAoτ2 =
VmρmCvm
hiAi + hoAo
El balance de energıa en la camisa de enfriamiento se formula como:
QcρcCpTci + hoAo(Tm − Tc) − QcρcCpTc = VcρcCvdTc
dt(4.24)

4.7 Ejemplos de Sistemas Termicos 119
Tabla 4.3: Parametros y variables del proceso de enfriamiento en un tanque concamisa de enfriamiento. En la Tabla, C.T.C. significa Coeficiente de TransferenciaCalorıfica.
Sımbolo Descripcion Valor Unid.
Qc, Qc, qc Flujo de agua actual, estable y residual m3/s
q Flujo actual del producto que ingresa m3/s
ρ Densidad de q kg/m3
ρc Densidad de Qc kg/m3
ρm Densidad de la pared de metal del tanque kg/m3
Cp Capacidad calorıfica de q Jkg−K
Cv Capacidad calorıfica en el tanque Jkg−K
Cvm Capacidad calorıfica del metal de la pared Jkg−K
V Volumen del producto en el tanque m3
Vm Volumen de la pared de metal del tanque m3
T, T , t Temp. actual, estable y residual de q K
Tci, T ci, tci Temp. actual, estable y residual de Qc K
Ti, T i, ti Temp. actual, estable y residual de q K
Tm, Tm, tm Temp. actual, estable y residual del metal K
hi C.T.C. de la cara interna del tanque Jm2−s−K
ho C.T.C. de la cara externa del tanque Jm2−s−K
Ai Area interna de transferencia de calor m2
Ao Area externa de transferencia de calor m2
La ecuacion (4.24) es no lineal debido a los productos QcTci y QcTc, los cuales sepueden linealizar siguiendo el procedimiento de la subseccion 2.6.1, ejemplo 2.49,sabiendo que: qc = Qc − Qc. Esto es:
QcTci = QcT ci + T ciqc + Qctci
QcTc = QcT c + T cqc + Qctc (4.25)
Reemplazando las ecuaciones de (4.25) en (4.24) se obtiene:
ρcCp(QcT ci +T ciqc+Qctci)+hoAo(Tm−Tc)−ρcCp(QcT c+T cqc+Qctc) = VcρcCvdTc
dt(4.26)
En el estado estacionario todas las variables residuales son nulas. Por consiguiente,(4.26) toma la forma:
ρcCpQcT ci + hoAo(Tm − T c) − ρcCpQcT c = VcρcCvdT c
dt(4.27)

120 Modelado de Sistemas Lineales
Restando (4.26) de (4.26) y pasando la resultante al dominio de Laplace se obtiene:
tc(s) =K5
τ3s + 1tci +
K6
τ3s + 1tm +
K7
τ3s + 1qc (4.28)
K5 =QcρcCp
hoAohoAo + QcρcCp K6 =
hoAo
hoAo + QcρcCp
K7 =ρcCp(T c − T ci)
hoAo + QcρcCp
τ3 =VcρcCp
hoAo + QcρcCp
La Fig. 4.28(b) muestra el diagrama de bloques del sistema construido con las ecua-ciones (4.21), (4.24) y (4.28). Observar que dicho diagrama de bloques es similar aldel ejemplo ??, en donde se determinaron la funciones de transferencia t(s)/qc(s)(tipo PT3), t(s)/tci(s) (tipo PT3) y t(s)/ti(s) (tipo PD2T3).
4.8. Problemas
Problema 4.1 Sistema de Plataformas
La Fig. 4.29 muestra dos plataformas P1 y P2 de masas m1 y m2 despreciables yacopladas por resorte y amortiguador. El sistema de plataformas descrito tiene comoentradas de control las senales u1 y u2 generadas por dos actuadores. Las senalesde control son capaces de llevar a cero con suficiente rapidez los errores de posicione1 = r1 − y1 y e2 = r2 − y2, donde r1 y r2 son las senales de referencia, mientrasque y1 e y2 son las posiciones individuales de las plataformas que deseamos controlar.Determinar las ecuaciones de estado y de salida y el modelo de Lagrange del sistemadescrito.
Problema 4.2 Satelite
El satelite mostrado en la Fig. 4.30 se puede modelar como J θ = u, donde J es elmomento de inercia del satelite, θ es el angulo de inclinacion y u es el torque generadopor los impulsores para corregir el angulo de inclinacion. Determinar la ecuacion deestado del sistema.
Problema 4.3 Circuito Electrico
Para el circuito electrico mostrado en la Fig. 4.31, hallar la ecuacion de estadodel sistema sabiendo que las variables de estado son la tension vc en el condensadorC y la corriente iL en la inductancia L. La entrada al circuito es el voltaje u(t), Aes la ganancia del amplificador y tomar como salida la corriente iR en la resistenciaR. Luego, asumir valores unidad para los parametros y graficar la respuesta iR(t)cuando la entrada es: u(t) = 1 + 0.01t + sent.
Problema 4.4 Sistema Oscilatorio

4.8 Problemas 121
e
−
+
+
−
2y
1y
º»º»º»º»º»º»º»º»º»º»º»º»º»º»º¼»¼»¼»¼»¼»¼»¼»¼»¼»¼»¼»¼»¼»¼»¼
½½½¾¾¾
¿¿¿ÀÀÀ
2
+
−+
−
r
r P
P
R
R Y
Y
K
K
B
B
2 2
1
1
22
1
2
1
e 1
1
2
u 2
u 1
1
Fig. 4.29: Plataformas acopladas.
θ
uJ
Fig. 4.30: Esquema simplificado de un satelite.
AuCL
Ri R
v
CvvL
i i CL
Fig. 4.31: Circuito electrico.
Se desea investigar el movimiento oscilatorio del sistema mostrado en la Fig. 4.32.Considerar como entrada la posicion x y como salida la posicion y = x2−x. Notar queel sistema puede ser descrito con seis variables de estado porque posee seis elementosalmacenadores de energıa: tres masas y tres resortes traslacionales. Determinar la

122 Modelado de Sistemas Lineales
Á2ÁÁ2ÁÁ2ÁÁ2Á
Â2ÂÂ2ÂÂ2ÂÂ2Â
vx x x x
v v v11
22
33
K
B
K K
B B
1 2
2
3
31 M1 M M2 3
Fig. 4.32: Sistema oscilatorio.
descripcion en el espacio de estado de dicho sistema sabiendo que los estados son lasvelocidades v1, v2 y v3 y las fuerzas de elongacion fk1, fk2 y fk3 de los resortes.
Problema 4.5 Sistema Rotacional
Se desea determinar el modelo dinamico en el espacio de estado del sistemamecanico rotacional mostrado en la Fig. 4.33. Considerar como entrada el torqueT (t) y como salida la velocidad angular y = ω2 = dθ2
dt . Seleccionar como variables
de estado las velocidades angulares ω1 = dθ1dt y ω2 = dθ2
dt , y los torques rotacionalesTk1 = K1θ1 y Tk2 = K2θ2.
ÃÃÄÄÅ2Å2Å2Å2ÅÅ2Å2Å2Å2ÅÆ2Æ2Æ2Æ2ÆÆ2Æ2Æ2Æ2Æ ÇÇÈÈÉ2É2É2ÉÉ2É2É2ÉÊ2Ê2Ê2ÊÊ2Ê2Ê2Ê Ë2Ë2Ë2ËË2Ë2Ë2ËÌ2Ì2Ì2ÌÌ2Ì2Ì2ÌÍÍÎÎ
Ï2ÏÏ2ÏÐ2ÐÐ2ÐÑ2Ñ2Ñ2Ñ2Ñ2Ñ2Ñ2Ñ2Ñ2Ñ2Ñ2Ñ2Ñ2Ñ2Ñ2ÑÒ2Ò2Ò2Ò2Ò2Ò2Ò2Ò2Ò2Ò2Ò2Ò2Ò2Ò2Ò2Ò
Ó2Ó2Ó2ÓÔ2Ô2Ô Õ2Õ2Õ2ÕÖ2Ö2Ö2Ö×2×2×2×2×2×2×2×2×2×2×2×2×2×2×2×2×Ø2Ø2Ø2Ø2Ø2Ø2Ø2Ø2Ø2Ø2Ø2Ø2Ø2Ø2Ø2Ø2Ø
Ù2Ù2ÙÚ2Ú2Ú Û2Û2Û2ÛÛ2Û2Û2ÛÜ2Ü2Ü2ÜÜ2Ü2Ü2Ü
J J1 2
K 2B1 B2
B1 B2
K
T(t)
K1 θ1 θ2
Fig. 4.33: Sistema mecanico rotacional.
Problema 4.6 Sistema Termico
En el sistema termico mostrado en la Fig. 4.34 se desea determinar su ecuacionde estado, sabiendo que las entradas al sistema son el flujo de agua q1(t) y el flujo decalor Qi(t), mientras que las salidas son las temperaturas TM y TF . Considerar quela temperatura Ta del medio ambiente es constante. Se sabe ademas que TF > TM ,TF > Ta. Considerar que el flujo de salida qo es laminar. Los parametros CF y CM sonlos calores especıficos del fluido en el tanque y de la masa respectivamente, mientrasque RF y RM son resistencias hidraulicas.
Problema 4.7 Sistema Hidraulico
En el sistema hidraulico mostrado en la Fig. 4.35 se desea determinar su ecuacionde estado, sabiendo que la entrada al sistema es la fuerza f(t) aplicada sobre la masaM1 de seccion A1 y la salida es el desplazamiento x2 de la masa M2 de seccion A2.B, B1 y B2 son los coeficientes de friccion viscosa mientras K es la constante del

4.8 Problemas 123
ÝÝÝÝÝÝÝÝÝ
ÞÞÞÞÞÞÞÞÞ ß2ßà2à
áâã2ã2ã2ã2ã2ã2ã2ã2ã2ã2ã2ãä2ä2ä2ä2ä2ä2ä2ä2ä2ä2ä
ååååå
æ2æ2ææ2æ2ææ2æ2ææ2æ2ææ2æ2ææ2æ2ææ2æ2ææ2æ2æ
ç2ç2çç2ç2çç2ç2çç2ç2çç2ç2çç2ç2çç2ç2çç2ç2çè2è2è2è2è2è2è2è2è
CT
MM
Qh
RM
T
T
CF
F
q i
R F
a
VAPOR
q o
V
V
1
2
Fig. 4.34: Sistema hidraulico del problema 4.6.
é2é2é2é2é2é2é2é2é2é2é2éê2ê2ê2ê2ê2ê2ê2ê2ê2ê2ê2ê
ëëìì
íî
ï2ïï2ïðð
ñ2ññ2ñò2òò2òf(t)
A f 1
fA 2 2
1M
M 2
K B
ACEITE
B /2
1
1
B /2
B /2
B /2
1
2 2
x
x
1
2
Fig. 4.35: Sistema hidraulico del problema 4.7.
resorte. Se sugiere tomar como variables de estado: z1 = x1 (desplazamiento de lamasa M1), z2 = x1, z3 = x2 y z4 = x2.
Problema 4.8 Sistema Hıbrido
En el sistema hıbrido mostrado en la Fig. 4.36 se desea determinar su ecuacionde estado, sabiendo que la entrada al sistema es el flujo de agua q1(t) y la salidaes el voltaje V (t) del generador. Tomar como variables de estado la presion P1, lavelocidad angular ωT del eje del motor y la corriente de armadura iG del motor.
Problema 4.9 Sistema Electromecanico
En el sistema electromecanico mostrado en la Fig. 4.37, la rueda dentada deinercia J gira sobre una barra dentada de masa M a ω rad/s. El subsistema electricoy el torque motor Tm estan regidos por:
u = RIa + Vb + LdIa
dt; V : b = Kbωm; Tm = KmIa
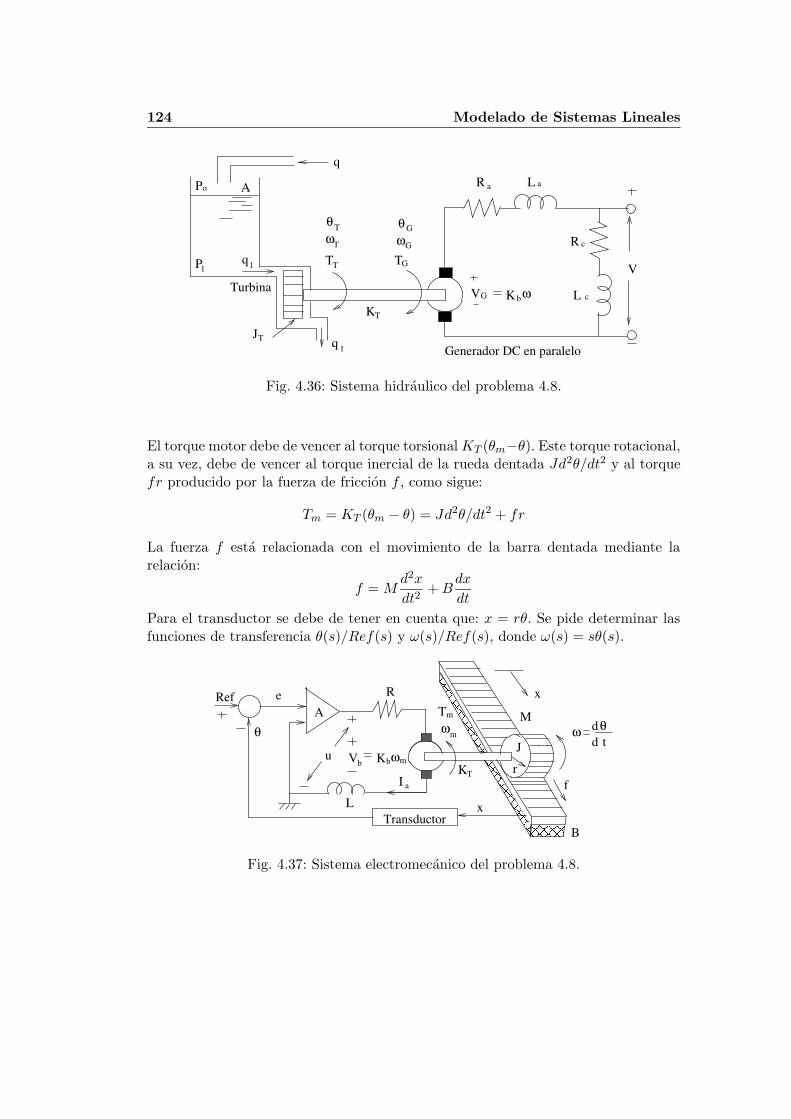
124 Modelado de Sistemas Lineales
q
VG K bω
L aR a
R
L
c
c
V
Generador DC en paralelo
q1
APo
P1T
ωθ T
T
T
KT
θωT
G
G
G
Turbina
q 1TJ
Fig. 4.36: Sistema hidraulico del problema 4.8.
El torque motor debe de vencer al torque torsional KT (θm−θ). Este torque rotacional,a su vez, debe de vencer al torque inercial de la rueda dentada Jd2θ/dt2 y al torquefr producido por la fuerza de friccion f , como sigue:
Tm = KT (θm − θ) = Jd2θ/dt2 + fr
La fuerza f esta relacionada con el movimiento de la barra dentada mediante larelacion:
f = Md2x
dt2+ B
dx
dt
Para el transductor se debe de tener en cuenta que: x = rθ. Se pide determinar lasfunciones de transferencia θ(s)/Ref(s) y ω(s)/Ref(s), donde ω(s) = sθ(s).
óôõõõõõõõõõõõõõõõõõõõõ
öööööööööööööööööööö
÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷
øøøøøøøøøøøøøøøøøøøø
ùùùúú
ûûüüýýþþ
ÿÿÿÿ
Ae
TransductorB
x
r
J
dθd t
uKT
ωm
Tm
Vb K
I a
ω
Ref
b
f
M
x
θ
R
L
ωm
Fig. 4.37: Sistema electromecanico del problema 4.8.
Capıtulo 5
Modelado de Sistemas NoLineales
En general, todos los sistemas son no lineales. Sin embargo, si el rango de operaciondel sistema controlado es pequeno, entonces basta emplear un modelo linealizado delsistema. Es decir, podemos emplear tecnicas de linealizacion para obtener el modelolineal partiendo del modelo no lineal.
No siempre conviene que un modelo no lineal sea lo mas exacto posible al compor-tamiento dinamico del sistema en cuestion. En la Ingenierıa de Control, mientras mascomplejo sea el modelo, mas engorroso sera el analisis y diseno del sistema de control.Por ello siempre es aconsejable que el modelo no lineal del sistema contenga las mınimascaracterısticas dinamicas de interes.
En este capıtulo, dedicado al modelado no lineal de sistemas, se emplean dos es-trategias: aplicacion de las leyes de la fısica y aplicacion de las ecuaciones de Lagrange.Los sistemas a modelar usando las leyes fısicas son: Manipulador Robotico de 1 Grado deLibertad (MR1), Sistema de Despegue y Aterrizaje (SDA) y Tanque Cerrado (TANQUE).Las ecuaciones de Lagrange seran empleadas para modelar los sistemas: Pendulo Inver-tido Traslacional (PIT), Grua puente (GPT), Pendulo Invertido Rotacional (PIR), Ma-nipulador Robotico Esferico (MRE), Manipulador Robotico Esferico de 3GDL (MRE3) yManipulador Robotico Traslacional (MRT). En la seccion Problemas tambien se proponeel modelado de otros sistemas no lineales.
5.1. Manipulador Robotico de 1GDL (MR1)
El Manipulador Robotico de 1GDL (MR1) mostrado en la Fig. 5.1 es uno de lossistemas prototipo a ser utilizado en esta publicacion para validar vıa experimentacionalgunos de los sistemas de control no lineal desarrollados en esta publicacion. La Fig.5.2 muestra su esquema de estudio. Este sistema prototipo se compone de un sub-sistema electrico y un subsistema mecanico. El subsistema electrico comprende unservomotor D.C. (Direct Current) con decodificador de posicion (encoder en ingles)incorporado, el cual se emplea para medir la posicion angular del brazo del mani-pulador en cada instante de tiempo. El servomotor posee una caja de engranajespara reducir la velocidad en su eje de salida; de esta manera se facilita el control deposicion del manipulador.

126 Modelado de Sistemas No Lineales
Fig. 5.1: El Manipulador Robotico de 1GDL (MR1).
El subsistema mecanico consiste de un brazo accionado por el torque rotacionalgenerado en el eje de salida del servomotor D.C. (el actuador). En el extremo libre delbrazo robotico se puede acoplar un efector final, el cual puede ser una pinza para asirobjetos, una herramienta para soldar, una herramienta para pintar, etc. En nuestrocaso usaremos una pinza con dos grados de libertad: un grado para rotar la pinza yotro para abrirla y cerrarla. Para propositos de modelado, vamos a suponer que elefector final y su carga se pueden modelar mediante una masa mh variable. La Tabla5.1 describe las variables y los valores de los parametros del manipulador mostradoen la Fig. 5.2.
El sistema MR1 es del tipo SISO (Single–Input–Single–Output) ya que solo poseeuna entrada: el voltaje de control u aplicado a la armadura del servomotor, y unasalida: la posicion angular θ del brazo.
i
N
T
R
L
u
BJ
T
a
a a
b
g1mm
1
m
θω
mm
2N
mL
b
+
_
+ θ
mh
KA
TLB
LJ
ωθ
L
mh
BgJg
TL
Lτ
g2
_V
Fig. 5.2: Esquema del Manipulador Robotico de 1GDL.

5.1 Manipulador Robotico de 1GDL (MR1) 127
Tabla 5.1: Parametros y variables del brazo robotico de 1GDL (MR1).
Sımbolo Descripcion Valor Unidades
u Voltaje de entrada al sistema V
KA Ganancia del amplificador 8.5
Va Voltaje de armadura V
Ra Resistencia de armadura 3.5 Ω
La Inductancia de armadura 0.004 H
ia Corriente de armadura A
Km Constante del torque motor 0.0436 N-m/A
Tm Torque motor N-m
TL Torque de carga N-m
τL Torque causado por pesos de la carga N-m
Tg1 Torque de entrada a los engranajes N-m
Tg2 Torque de salida de los engranajes N-m
Jm Inercia del motor 0.00059 kg-m2
Jg Inercia de los engranajes 0.066 kg-m2
JL Inercia de la carga kg-m2
Bm Constante de friccion del motor 0.00014 N-m/rad/s
Bg Constante de friccion en engranajes 0.0124 N-m/rad/s
BL Constante de friccion en la carga 0.0023 N-m/rad/s
mh Masa del efector final 0.1 kg
mb Masa del brazo 0.4 kg
L Longitud del brazo 0.25 m
rh Distancia al centro de masa del efector 0.02 m
Vb Voltaje contra electromotriz V
Kb Constante contra electromotriz 0.0565 V/rad/s
g Aceleracion de la gravedad 9.81 m/s2
N1, N2 No de dientes de los engranajes N2 > N1
n Relacion de engranajes (n = N2/N1) 18.5
θm Posicion angular del motor rad
θ Posicion angular de la carga rad
ω Velocidad angular de la carga rad/s
ωm Velocidad angular del motor ωm = nω rad/s
Kw Constante de elasticidad 0.052 N-m/rad
n Relacion de engranajes 18.5

128 Modelado de Sistemas No Lineales
Modelo del Subsistema Mecanico
Para modelar el subsistema mecanico del manipulador empleamos la segunda leyde Newton para los movimientos lineal y rotacional. La aplicacion de esta segundaley se traduce en una ecuacion de balance mecanico. Con respecto a la Fig. 5.2, laecuacion de balance mecanico en el eje del servomotor articulado al primer engranajese formula como:
Tm = Jmθm + Bmθm + Tg1 θm =dθm
dtθm =
d2θm
dt2(5.1)
donde Jm y Bm representan el momento de inercia y la constante de friccion viscosadel rotor respectivamente, Tm es el torque del servomotor, Tg1 es el torque de reacciondebido al primer engranaje y θm es la posicion angular en el lado del motor. Para losengranajes de reduccion del servomotor podemos formular:
n =N2
N1=
θm
θθm = nθ n > 1 (5.2)
donde N1 y N2 es el numero de dientes de los engranajes y n > 1 es la relacion entreellos. Para formular la ecuacion (5.2) se ha tenido en cuenta que el espacio angularrecorrido por el engranaje de menor radio es n veces mayor que el espacio recorridopor el engranaje de radio mayor. Por otra parte, el principio de la conservacion de laenergıa establece que el trabajo realizado por el engranaje de la izquierda debe serigual al trabajo realizado por el engranaje de la derecha, es decir:
Tg2θ = Tg1θm = Tg1nθ; Tg2 = nTg1 (5.3)
donde Tg2 es el torque de reaccion debido al segundo engranaje. El balance mecanicoen el eje articulado al brazo del manipulador produce:
Tg2 = Jg θ + Bg θ + TL (5.4)
donde Jg y Bg representan el momento de inercia y la constante de friccion viscosade la caja de reduccion respectivamente. El torque de carga TL se formula como (verFig. 5.3):
TL = JLθ + BLθ + τL (5.5)
τL = mbgL
2senθ + mhg (L + rh)senθ = Q sen θ (5.6)
Q = mbgL
2+ mhg (L + rh)
donde JL y BL representan el momento de inercia y la constante de friccion viscosade la carga no lineal (brazo mas efector final), g es la constante gravitacional, mb
y mh denotan las masas del brazo y del efector final (esta masa tambien incluye lamasa de la carga en el efector) respectivamente, y rh denota la distancia desde elextremo del brazo al centro de masa de mh. Para fines practicos se puede asumir querh es despreciable con respecto a la longitud L del brazo.
Notar en (5.6) que el torque τL se debe a las fuerzas ejercidas por los pesos delbrazo y de la esfera. Ası, el torque mb g L senθ
2 es el producto del peso mb g del brazo

5.1 Manipulador Robotico de 1GDL (MR1) 129
2_L
_2L
θ
hr
m gh
mbg
τ L
Fig. 5.3: Brazo del manipulador robotico de 1GDL.
por su brazo de palanca L senθ2 , mientras que el torque mh g (L+rh)senθ es el producto
del peso mh g del efector por su brazo de palanca (L + rh)senθ.El momento de inercia JL de la carga es la suma del momento de inercia del brazo
Jb mas el momento de inercia del efector Jh. Por otra parte, el teorema de los ejesparalelos, establece que el momento de inercia de una masa m alrededor de un eje derotacion que no pasa por su CM esta dado por:
J = Jo + m a2 (5.7)
donde Jo es el momento de inercia de m alrededor del eje de rotacion que pasa porsu centro de masa y a es la distancia entre los dos ejes. Asumiendo que la masamb del brazo se concentra en su CM, su momento de inercia con relacion a un ejeperpendicular que pasa por su CM es (ver ejemplo 4.1):
Jbo =1
12mbL
2 (5.8)
Considerando que la masa del brazo esta distribuida a lo largo de su longitud yaplicando el teorema de los ejes paralelos, el momento de inercia Jb con respecto alpunto de articulacion se formula como:
Jb = Jbo + mb
(L
2
)2
=1
3mbL
2 (5.9)
Del mismo modo, asumiendo que la masa mh del efector esta concentrada en su CM,entonces:
Jh = Jho + mh(L + rh)2 (5.10)
donde Jho es el momento de inercia del efector con relacion a un eje de rotacion quepasa por su CM Si consideramos por ejemplo, sin perder generalidad, que el efector esuna masa esferica de radio rh, su momento de inercia alrededor de un eje de rotacionque coincide con su diametro [6] es:
Jho =2
5mhr2
h (5.11)

130 Modelado de Sistemas No Lineales
Empleando (5.5), (5.6), (5.4), (5.3) y (5.2) en (5.1) y operando se obtiene:
nTm = Jeq θ + Beq θ + τL = Jeqω + Beqω + Q senθ (5.12)
donde:Jeq = n2Jm + Jg + JL Beq = n2Bm + Bg + BL
Las expresiones de Q, Jh y Jb (tener en cuenta que JL = Jh + Jb) se dan en (5.6),(5.10) y (5.8) respectivamente.
Modelo del Subsistema Electrico
El voltaje de armadura Va viene expresado por (ver la descripcion de las variablesy parametros en la Tabla 5.1):
Va = iaRa + Ladiadt
+ Vb (5.13)
donde ia, Ra y La son la corriente, la resistencia y la inductancia en la armaduradel servomotor respectivamente, y Vb es el voltaje de fuerza contra electromotrizgobernado por la relacion:
Vb = Kbωm = Kbnω = Kbnθ (5.14)
donde Kb es la constante de fuerza contra electromotriz y ωm es la velocidad angulardel motor. El voltaje de armadura Va es:
Va = KAu (5.15)
donde KA es la ganancia del amplificador.
Conversion de Energıa Electrica en Mecanica
Sabemos que el torque motor Tm (energıa mecanica) es proporcional a la corrientede armadura ia (energıa electrica):
Tm = Kmia (5.16)
donde Km es la constante del motor. Reemplazando (5.12) en ( 5.16) se obtiene lasiguiente ecuacion de conversion de energıa electrica a energıa mecanica:
nKmia = Jeq θ + Beq θ + τL (5.17)
Por otra parte, igualando (5.13) con (5.15) obtenemos:
diadt
=KA
Lau − Kbn
Laω − Ra
Laia (5.18)
Empleando (5.16) en (5.12) y despejando ω = dω/dt obtenemos:
dω
dt= − Q
Jeqsenθ − Beq
Jeqω +
nKm
Jeqia (5.19)

5.1 Manipulador Robotico de 1GDL (MR1) 131
Ecuacion de Estado del Sistema MR1 con La 6= 0
Las ecuaciones (5.18) y (5.19) describen el modelo no lineal del sistema de tercerorden. Eligiendo en dichas ecuaciones como variables de estado: x1 = θ (posicionangular), x2 = θ (velocidad angular) y x3 = ia (corriente de armadura), se obtiene:
x1 = x2
x2 = − Q
Jeqsenx1 −
Beq
Jeqx2 +
nKm
Jeqx3
x3 = −nKb
Lax2 −
Ra
Lax3 +
KA
Lau (5.20)
donde la salida es la posicion x1 y la senal de control es u (la tension de armadura).
Ecuacion de Estado del Sistema MR1 con La∼= 0
En la Tabla 5.1 podemos observar que la inductancia de armadura La del ser-vomotor es bastante pequena, de modo tal que puede despreciarse sin que se pierdaconsiderable exactitud en los resultados. Considerando el producto x3La = 0 en latercera ecuacion de (5.20) y despejando la corriente de armadura x3 resulta:
x3 =KA
Rau − nKb
Rax2 (5.21)
Reemplazando (5.21) en la segunda ecuacion de (5.20), se obtiene la ecuacion deestado no lineal de orden dos del manipulador:
x1 = x2
x2 = −a1senx1 − a2x2 + bu (5.22)
donde:
a1 =Q
Jeqa2 =
(BeqRa + n2KmKb
JeqRa
)b =
nKmKA
JeqRa
Modelo de Lagrange del Sistema MR1 con La∼= 0
La ecuacion (5.16) tiene la forma de (5.12):
nKmia = Jeq θ + Beq θ + τL τL = Qsenθ
Si despreciamos la inductancia La en (5.18), entonces el producto Ladiadt iguala a
cero. Por consiguiente:0 = KA u − Kbn θ − Ra ia
Combinando las dos ultimas ecuaciones se obtiene el denominado modelo dinamicode Lagrange:
Mθ + P θ + d = u (5.23)
donde:
M =JeqRa
nKmKAP =
(BeqRa
nKmKA+
nKb
KA
)d =
RaQ
nKmKAsenθ

132 Modelado de Sistemas No Lineales
Forma Asociada del Sistema MR1 con La∼= 0
La ecuacion (5.23) se puede poner en su denominada forma asociada:
Mθ + P θ + d = hθ +2∑
i=1
αifi = hθ + α1f1 + α2f2 = u (5.24)
donde:
h = M α1 = P f1 = θ α2 =RaQ
nKmKAf2 = senθ
Forma Asociada del Sistema MR1 con La 6= 0
Definamos y = θ y x = [ y y y y(3) ]. Derivando (5.19) se obtiene:
d3y
dt3= − Q
Jeqcos y y − Beq
Jeqy +
nKm
Jeq
diadt
(5.25)
Reemplazando (5.18) en (5.25) se obtiene:
d3y
dt3= − Q
Jeqcos y y − Beq
Jeqy +
nKmKA
JeqLau − n2KmKb
JeqLay − nKmRa
JeqLaia (5.26)
Despejamos ia de ( 5.19), la reemplazamos en (5.26) y luego reordenamos la ecuacionresultante para obtener la siguiente forma asociada del sistema MR1:
h y(3) +
4∑
i=1
αifi(x) = u (5.27)
donde:
h =JeqLa
nKmKAα1 =
(BeqLa + RaJeq
nKAKm
)
α2 =
(nKb
KA+
RaBeq
nKAKm
)α3 =
QLa
nKAKmα4 =
RaQ
nKAKm
f1 = y f2 = y f3 = y cos y f4 = sen y
5.2. Manipulador Robotico con Articulacion Elastica (MRAE)
La Fig. 5.4 muestra el esquema de estudio manipulador robotico con articulacionelastica (MRAE) de 2GDL. El efecto del acoplamiento elastico entre el eje de salidadel servomotor con el brazo (o eslabon) del MRAE, se puede modelar mediante unresorte rotacional con constante de elasticidad Kw.
En la Fig. 5.4, u denota el voltaje de entrada, θ (la salida del sistema) es la posicionangular del brazo de longitud L y masa mb, θm representa la posicion angular del ejedel actuador (el servomotor DC) antes de la caja de reduccion. Al extremo del brazose puede articular un efector final, como en el caso del manipulador de 1GDL. Latabla 5.1 tambien describe las variables y los valores de los parametros del sistemamostrado en la Fig. 5.2.

5.2 Manipulador Robotico con Articulacion Elastica (MRAE) 133
!!!!
"""""""""#########
$$$$$$%%%%%%
&&&&&&&&&''''''(((((((((())))) ****++++,,,,,,----
...///
i
N
T
R
L
u
BJ
T
a
a a
b
g1mm
1
m
θω
mm
2N
mL
b
+
_
+
_
θ
mh
KA
τ L
Tg2 TLB
LJLJ g
Bg
ωθ
wKL
mh
V
Fig. 5.4: Esquema de estudio del Manipulador Robotico con Articulacion Elastica(MRAE).
Ecuaciones Dinamicas del MRAE
El balance mecanico en el eje del servomotor articulado al primer engranaje seexpresa como:
Tm = Jmθm + Bmθm + Tg1
donde Jm y Bm representan el momento de inercia y la constante de friccion viscosadel rotor, Tm es el torque del servomotor y Tg1 es el torque de reaccion debido alprimer engranaje. El balance mecanico del eje articulado a la carga se expresa como:
Tg2 = Jgθm
n+ Bg
θm
n+ Kw
(θm
n− θ
)
en donde Kw
(θmn − θ
)es el torque originado por el acoplamiento elastico, Tg2 es el
torque debido al segundo engranaje, n = N2/N1 denota la relacion de transmision delos engranajes, y Jg y Bg representan el momento de inercia y la constante de friccionviscosa de la caja de reduccion respectivamente. Asumiendo engranajes ideales, laconservacion de la energıa requiere que el trabajo realizado por cada engranaje debede ser el mismo, a saber:
Tg1θm = Tg2θm
nEmpleando las relaciones anteriores, la ecuacion que gobierna el torque servomotorse formula como:
Tm =Jeq
n
(θm
n
)+
Beq
n
(θm
n
)+
Kw
n
(θm
n− θ
)(5.28)
Jeq = n2Jm + Jg Beq = n2Bm + Bg
La ecuacion que gobierna la dinamica del brazo del manipulador (ver Fig. 5.3) sepuede expresar como:
Kw
(θm
n− θ
)= JLθ + BLθ +
1
2mbgLsen θ + mhg(L + rh)sen θ (5.29)

134 Modelado de Sistemas No Lineales
donde JL y BL representan el momento de inercia y la constante de friccion viscosade la carga no lineal (brazo mas efector), g es la constante gravitacional, mb y mh
(esta masa tambien incluye la masa de la carga) denotan la masa del brazo y delefector respectivamente, rh es la distancia al CM del efector y, 1
2mbg(L + rh)sen θy mhgL sen θ son los torques debido a los pesos del brazo y del efector respectiva-mente. Los momentos de inercia JL = Jh + Jb, asumiendo que las masas mh y mb seconcentran en sus respectivos CM, se formulan en las ecuaciones (5.9) y (5.10).
Para completar el modelado de la parte electrica del sistema MRAE, podemosaseverar que:
Raia + Ladiadt
+ Vb = KAu (5.30)
donde KA es la ganancia del amplificador y Vb es el voltaje de la fuerza contraelectromotrız y responde a la relacion:
Vb = Kbθm (5.31)
donde Kb es la constante de fuerza contra electromotriz. El torque servomotor Tm estambien proporcional a la corriente ia, es decir:
Tm = Kmia (5.32)
donde Km es la constante del servomotor.
Modelo de Lagrange del MRAE
Las ecuaciones (5.28) y (5.29) se pueden reordenar en forma matricial, con elproposito de obtener el denominado modelo dinamico de Lagrange del sistema MRAE:
T = Hq + Cq + d (5.33)
donde:
Tm
0
=
Jeq
n 0
0 JL
θmn
θ
+
Beq
n 0
0 BL
θmn
θ
+
Kwn
(θmn − θ
)
d2
d2 =
(1
2mb + mh
)Lg sen θ − Kw
(θm
n− θ
)
Despreciando la inductancia de armadura La en (5.30), y despejando ia se obtiene:
ia = −Kb
Raθm +
KA
Rau (5.34)
Sustituyendo ia en Tm = Kmia de (5.33) y despejando u, el modelo de Lagrangetoma una nueva forma:
u = Mq + Pq + d (5.35)
u
0
=
m11 0
0 JL
θmn
θ
+
p11 0
0 BL
θmn
θ
+
d1
d2
(5.36)
m11 =RaJeq
nKAKmp11 =
nKb
KA+
RaBeq
nKAKmd1 =
RaKw
nKAKm
(θm
n− θ
)

5.2 Manipulador Robotico con Articulacion Elastica (MRAE) 135
Modelo del MRAE en el Espacio de Estado
Seleccionando como variables de estado: x1 = θ, x2 = θ, x3 = θm/n, x4 =θm/n, y x5 = ia, entonces el vector de estado del sistema es de orden 5. Luego,las ecuaciones (5.28), (5.29) y (5.30) (sin despreciar la inductancia La) producen lasiguiente ecuacion de estado no lineal:
x =
x1
x2
x3
x4
x5
= f(x, u) =
f1(x, u)f2(x, u)f3(x, u)f4(x, u)f5(x, u)
(5.37)
f1(x, u) = x2
f2(x, u) = −Kw
JLx1 −
BL
JLx2 +
Kw
JLx3 −
Lg
JL
(mb
2+ mh
)sen x1
f3(x, u) = x4
f4(x, u) =Kw
Jeqx1 −
Kw
Jeqx3 −
Beq
Jeqx4 +
nKm
Jeqx5
f5(x, u) = −nKb
Lax4 −
Ra
Lax5 +
KA
Lau
donde hemos usado el hecho de que x1 = x2 y x3 = x4. Si la salida del sistema esy = θ, entonces la ecuacion de salida del MRAE resulta:
y = h(x) = Cx = [1 0 0 0 0]x (5.38)
Despreciando la inductancia de armadura La en (5.37), lo que equivale a eliminarun elemento almacenador de energıa independiente (por consiguiente, eliminar unavariable de estado), entonces:
Lax5 = 0 = −nKbx4 − Rax5 + KAu ⇒ x5 = −nKb
Rax4 +
KA
Rau
Reemplazando x5 en la cuarta ecuacion de (5.37), se obtiene una ecuacion de estadono lineal de orden 4:
x1
x2
x3
x4
=
f1(x, u)f2(x, u)f3(x, u)f4(x, u)
(5.39)
f1(x) = x2
f2(x) = −Kw
JLx1 −
BL
JLx2 +
Kw
JLx3 −
Lg
JL
(mb
2+ mH
)sen x1
f3(x) = x4
f4(x) =Kw
Jeqx1 −
Kw
Jeqx3 −
(n2KmKb
JeqRa+
Beq
Jeq
)x4 +
nKmKA
JeqRau
La salida del sistema en este caso se expresa como:
y = h(x) = Cx = [1 0 0 0]x (5.40)

136 Modelado de Sistemas No Lineales
5.3. Sistema Tanque Cerrado
5.3.1. Descripcion del Sistema
El sistema tanque cerrado con agua estudiado aquı se muestra en la Fig. 5.5. LaFig. 5.6 ilustra el esquema para estudio de este sistema, donde se observa que losflujos de agua frıa qC y de agua caliente qH se mezclan en el interior del tanque con elproposito de producir el flujo de salida qD a una temperatura θ. Por consiguiente, elsistema tanque con agua es multivariable cuadrado debido a que posee dos entradas:los flujos qC y qH , y dos salidas: el nivel h del agua dentro del tanque y la temperaturaθ que se asume uniforme en el interior del tanque.
Fig. 5.5: Sistema tanque con agua.
El objetivo del sistema de control a disenar consiste en determinar adecuadasfuerzas de control qC y qH con la capacidad de estabilizar las salidas controladash y θ, cumpliendo ciertas especificaciones de diseno previamente establecidas. Lamanipulacion de las fuerzas de control se realiza mediante dos valvulas de controlneumaticas, mientras que el transmisor de nivel LT y el transmisor de temperaturaTT se ocupan de medir y transmitir el nivel y la temperatura respectivamente. LaTabla 5.2 describe las variables y los parametros valorados del sistema tanque cerradocon agua.
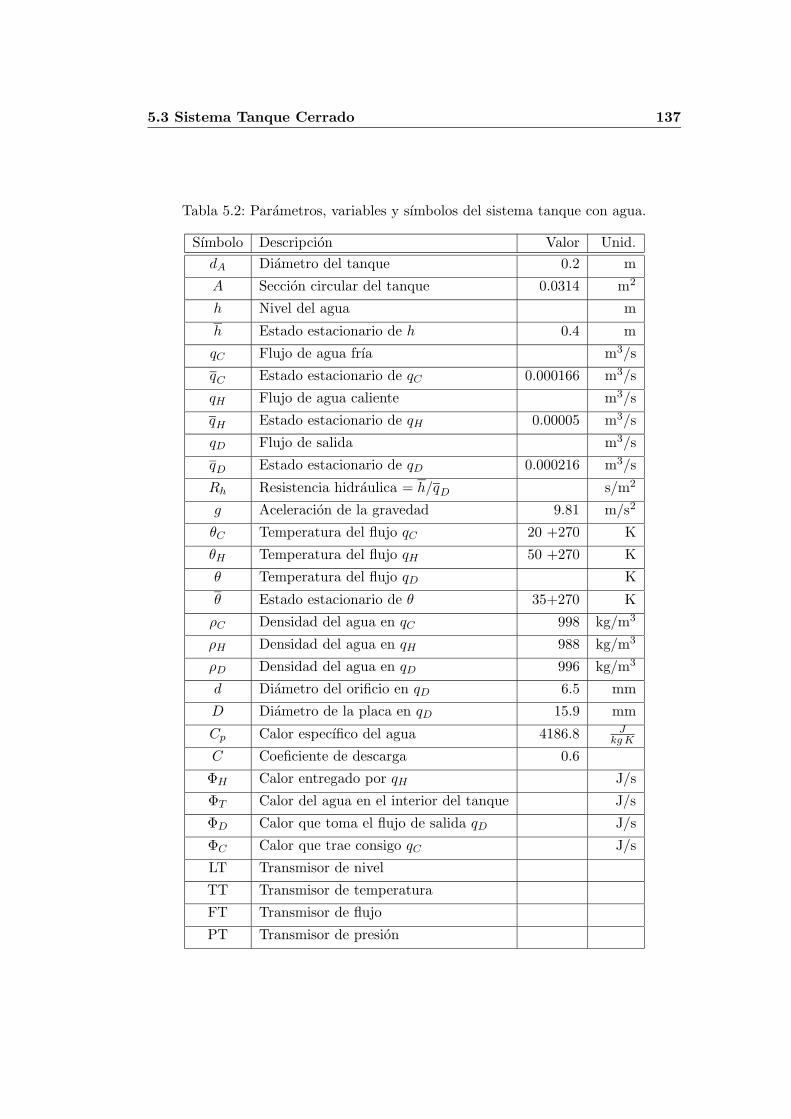
5.3 Sistema Tanque Cerrado 137
Tabla 5.2: Parametros, variables y sımbolos del sistema tanque con agua.
Sımbolo Descripcion Valor Unid.
dA Diametro del tanque 0.2 m
A Seccion circular del tanque 0.0314 m2
h Nivel del agua m
h Estado estacionario de h 0.4 m
qC Flujo de agua frıa m3/s
qC Estado estacionario de qC 0.000166 m3/s
qH Flujo de agua caliente m3/s
qH Estado estacionario de qH 0.00005 m3/s
qD Flujo de salida m3/s
qD Estado estacionario de qD 0.000216 m3/s
Rh Resistencia hidraulica = h/qD s/m2
g Aceleracion de la gravedad 9.81 m/s2
θC Temperatura del flujo qC 20 +270 K
θH Temperatura del flujo qH 50 +270 K
θ Temperatura del flujo qD K
θ Estado estacionario de θ 35+270 K
ρC Densidad del agua en qC 998 kg/m3
ρH Densidad del agua en qH 988 kg/m3
ρD Densidad del agua en qD 996 kg/m3
d Diametro del orificio en qD 6.5 mm
D Diametro de la placa en qD 15.9 mm
Cp Calor especıfico del agua 4186.8 Jkg K
C Coeficiente de descarga 0.6
ΦH Calor entregado por qH J/s
ΦT Calor del agua en el interior del tanque J/s
ΦD Calor que toma el flujo de salida qD J/s
ΦC Calor que trae consigo qC J/s
LT Transmisor de nivel
TT Transmisor de temperatura
FT Transmisor de flujo
PT Transmisor de presion

138 Modelado de Sistemas No Lineales
TT
LT
PT
FT
FT
FT= Transmisor de Flujo
PT= Transmisor de Presión
LT= Transmisor de Nivel
TT = Transmisor de Temperatura
Reboce
Drenaje
Agua Caliente
Agua Fría
Fig. 5.6: Esquema de estudio del sistema tanque con agua.
5.3.2. Modelo Dinamico No Lineal del Sistema
Balance de Masas
Aplicando balance de masas en el tanque, el cambio de volumen de agua acumu-lado en su interior se modela como:
Adh
dt= Ah = qC + qH − qD (5.41)
donde A es la seccion del tanque, h es la altura del agua, Ah es el cambio de volumende agua en el tiempo t, qC (agua frıa) y qH (agua caliente) son los flujos de entradaal tanque y qD (agua calentada) es el flujo de salida, el cual se calcula de [39]:
qD = CEπ
4d2√
2ρD∆p = a√
h; a = CEπ
4d2ρD
√2g (5.42)
donde hemos usado el hecho de que la caıda de presion ∆p en la tuberıa de diametroD provocada por la placa de orificio de diametro d se expresa como:
∆p = ρDgh
En la expresion (5.42), g es la aceleracion de la gravedad, C = 0.6 es el coeficientede descarga del orificio, ρD es la densidad del agua a una temperatura θ, β = d/D esuna relacion igual a 0.41 y E es una constante de correccion del valor del flujo debidoa consideraciones geometricas, el cual se expresa como:
E = (1 − β4)−1/2

5.3 Sistema Tanque Cerrado 139
Despejando h de (5.41), la ecuacion de estado para la variable de estado nivel tomala forma:
h = − a
A
√h +
1
AqC +
1
AqH (5.43)
Los valores de las densidades del agua en funcion de la temperatura se pueden obtenerde la Fig. 5.7.
0 10 20 30 50 6040980
985
990
995
1000
1005
TEMPERATURA ° C
DENSIDAD Kg/m 3
Fig. 5.7: Valores de la densidad del agua versus la temperatura.
Balance de Energıa Termica
El balance de energıa termica dentro del tanque cerrado, despreciando perdidas,se formula como:
ΦT = −ΦD + ΦC + ΦH (5.44)
donde ΦH es calor entregado por el flujo de agua caliente qH , ΦT es el calor delagua en el interior del tanque, ΦD es el calor que toma el flujo de salida qD y ΦC
es el calor que trae consigo el flujo de entrada de agua frıa qC . Cabe recalcar quese esta despreciando el calor que se libera al exterior del tanque debido a que taltanque es cerrado y suficientemente aislado. Las relaciones que gobiernan los flujoscalorıficos descritos anteriormente son:
ΦT = AhρDCpdθ
dt= AhρDCpθ
ΦC = CpρCθCqC
ΦH = CpρHθHqH
ΦD = CpρDθ qD = CpρDθ a√
h (5.45)
Los parametros que aparecen en (5.45) se describen en la tabla 5.2. Observar que seasume un valor constante para el calor especıfico del agua Cp. La ecuacion de estadode la variable de estado temperatura θ se obtiene despejando dθ
dt = θ de (5.44):
θ = − a
Ahθ√
h +ρCθC
ρDA
qC
h+
ρHθH
ρDA
qH
h(5.46)
Definamos las siguientes fuerzas de control o variables manipuladas: u1 = qC ,u2 = qH y las siguientes variables de estado: x1 = h, x2 = θ. Juntando las ecuaciones

140 Modelado de Sistemas No Lineales
(5.43) y (5.46), la ecuacion de estado que describe la dinamica del sistema tanquecerrado con agua se formula como:
x = f(x,u) (5.47)
x =
[x1
x2
]=
[h
θ
]x =
[x1
x2
]u =
[u1
u2
]=
[qC
qD
]
f =
[f1
f2
]=
− aA
√x1 + 1
Au1 + 1Au2
− aA
x2√x1
+ ρCθCρDA
u1x1
+ ρHθHρDA
u2x1
Dado que las variables de estado son las variables medidas del sistema, entonces laecuacion de salida posee la siguiente expresion:
y = Cx (5.48)
y =
[y1
y2
]=
[x1
x2
]C =
[1 00 1
]
5.3.3. Modelo Dinamico de Lagrange del Sistema
El modelo dinamico de Lagrange del sistema tanque cerrado con agua se obtienereordenado las ecuaciones de (5.47) en la forma siguiente:
u1 + u2 = Ax1 + a√
x1
ρCθCu1 + ρHθHu2 = ρDAx1x2 + ρDa√
x1 x2
Por consiguiente:
[1 1
ρcθC ρHθH
] [u1
u2
]=
[A 00 ρDAx1
] [x1
x2
]+
[a√
x1
ρDa√
x1 x2
]
Operando en la ultima ecuacion, es facil demostrar que el modelo dinamico de La-grange del sistema toma la forma:
u = P x + d (5.49)
P =1
(ρHθH − ρCθC)
[ρHθHA −ρDAx1
−ρCθCA ρDAx1
]
d =1
(ρHθH − ρCθC)
[ρHθHa
√x1 − ρDa
√x1 x2
−ρCθCa√
x1 + ρDa√
x1 x2
]
5.3.4. Modelo Dinamico Lineal del Sistema
Siguiendo el procedimiento de linealizacion descrito en 2.6.2, el modelo lineal delsistema tanque cerrado toma la forma:
x = Ax + Bu
5.4 Metodo de Las Ecuaciones de Lagrange 141
A =
∂f1
∂x1
∂f1
∂x2
∂f2
∂x1
∂f2
∂x2
(x,u)
B =
∂f1
∂u1
∂f1
∂u2
∂f2
∂u1
∂f2
∂u2
(x,u)
(5.50)
La ecuacion de salida es la misma expresion dada en (5.48). Las respuestas al escalonde las salidas h y θ se muestran en la Fig. 5.8, las cuales se determinaron con elprograma tal.m.
% tal.m RESPUESTAS AL ESCALON DEL SISTEMA TANQUE CERRADO LINEALIZADO
clear all; close all; clc;
% PARAMETROS
C=0.6; D=0.0159; d=0.0065; beta=d/D; E=(1-beta^4)^(-1/2); rhoD=996;
g=9.81; a=C*E*pi*d^2*rhoD*sqrt(2*g)/4; A=0.0314; rhoH=988; Cp=4186.8;
rhoC=998; thetaH=50+270.15; thetaC=20+270.15;
% VALORES ESTACIONARIOS
barh=0.4; bartheta=35+270.15; barqC=2.16e-4; barqH=0.5e-4;
barqD=2.16e-4; Rh=barh/barqD;
% MODELO LINEAL, DONDE: df1/dx1=df1dx1, df1/dx2=df1x2, etc.
% df1/du1=df1du1, df1/du2=df1u2, etc.
df1dx1=-a/(2*A*sqrt(barh)); df1dx2=0;
df2dx1=a*bartheta*barh^(-1.5)/(2*A) - ...
(rhoC*thetaC*barqC+rhoH*thetaH*barqH)/(rhoD*A*barh^2);
df2dx2=-a/(A*sqrt(barh)); df1du1=1/A; df1du2=1/A;
df2du1=rhoC*thetaC/(rhoD*A*barh); df2du2=rhoH*thetaH/(rhoD*A*rhoH);
AA=[df1dx1 df1dx2;df2dx1 df2dx2]; BB=[df1du1 df1du2;df2du1 df2du2];
CC=[1 0;0 1]; DD = [0 0;0 0]; T=0.01; N=1000; x=[0;0];
for k=1:N
u=[1;1]; x = x + T*(AA*x+BB*u); X1(k)=x(1); X2(k)=x(2);
end
ejex=linspace(0,T*N,N);
subplot(211), plot(ejex,X1), ylabel(’h’), xlabel(’TIEMPO’)
subplot(212), plot(ejex,X2), ylabel(’theta’), xlabel(’TIEMPO’)
print -deps -f talr
5.4. Metodo de Las Ecuaciones de Lagrange
Las ecuaciones diferenciales que gobiernan el movimiento de complicados sistemasmecanicos, se pueden obtener empleando las ecuaciones de Lagrange, las cuales sederivan de las leyes de Newton del movimiento. El metodo de las ecuaciones deLagrange considera cantidades escalares (energıas potencial y cinetica) en lugar devectores (fuerzas y torques), minimizando ası la necesidad de complicados diagramasvectoriales.
El modelo dinamico del sistema obtenido con el metodo de las ecuaciones deLagrange se denomina el modelo de Lagrange. Este modelo tambien nos permite de-terminar el modelo en el espacio de estado. El metodo en cuestion requiere de larepresentacion del sistema mediante un conjunto de coordenadas generalizadas qi
(i = 1, 2, . . . , r), una para cada grado de libertad independiente del sistema. Luego,la energıa cinetica V y la energıa potencial U se formulan en terminos de tales coorde-nadas y de sus derivadas con el fin de establecer la funcion Lagrangiana del sistema,

142 Modelado de Sistemas No Lineales
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
h
TIEMPO
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2x 104
thet
a
TIEMPO
Fig. 5.8: Respuestas al escalon del sistema tanque con agua linealizado.
la cual toma la forma:
L = V (q1, . . . , qr, q1, . . . , qr) − U(q1, . . . , qr, q1, . . . , qr) (5.51)
Notar en la ecuacion (5.51) que L depende de las variables q1, . . . , qr, q1, . . . , qr. Porotra parte, de acuerdo al principio de la mınima accion de Hamilton para sistemasconservativos, la integral I definida por:
I =
∫ t2
t1
L(q1, . . . , qr, q1, . . . , qr)
es un extremo para la trayectoria de movimiento del sistema desde el tiempo t1 hastael tiempo t2. En adicion, la variacion de I es igual al trabajo realizado por fuerzasexternas. Basado en el principio de Hamilton, se puede demostrar que las ecuacionesque gobiernan el movimiento de un sistema dinamico constituyen las ecuaciones deLagrange [8], [9]:
d
dt
(∂L
∂qi
)− ∂L
∂qi= Qi i = 1, 2, . . . , r (5.52)
donde Qi indica las fuerzas y torques generalizados que son externos al sistema o noson obtenibles a partir de una funcion potencial escalar. Si asignamos una variable deestado para cada coordenada generalizada qi y otra para su derivada qi, tendremosentonces 2r ecuaciones diferenciales de segundo orden de la forma dada en (5.52)correspondientes al sistema de r grados de libertad.

5.5 Pendulo Invertido Traslacional (PIT) 143
5.5. Pendulo Invertido Traslacional (PIT)
El sistema pendulo invertido traslacional consiste de un pendulo montado sobreun carro que se desplaza en forma horizontal. Este carro esta impulsado por unservomotor DC a traves de un sistema de poleas, tal como se muestra en la Fig.5.9. Para mayor claridad, el sistema pendulo invertido traslacional se ha separado endos subsistemas: el subsistema conformado por el carro y el pendulo y el subsistemaconformado por el motor y el sistema de poleas.
010010010212212212 313313313414414414
515151515151515151515151515151515151515151515151551515151515151515151515151515151515151515151515156161616161616161616161616161616161616161616161661616161616161616161616161616161616161616161616717717717717818818818818
99999
:::::;1;;1;;1;<1<<1<<1<
FCarro
y
rp
Polea
Articulación
θ
zm
m
m
e
v
c
u+
Señal de control
Servomotor D.C.
Péndulo
0
Fig. 5.9: Sistema pendulo invertido.
Modelo del Subsistema Carro-Pendulo
El subsistema carro-pendulo se ilustra en la Fig. 5.10 y esta conformado por uncarro y una varilla. De la Fig. 5.10 podemos observar que las coordenadas de loscentros de masa de la varilla de masa mv y de la esfera de masa me son:
=>==>==>=?>??>??>?
y y’
0z
z’
P
m
l
m
z
F
v
e
vθ
/2
g
gl e
l v
Fig. 5.10: Subsistema carro-pendulo.
zv = z +lv2
sen θ yv =lv2
cos θ (5.53)
ze = z + lesen θ ye = le cos θ (5.54)

144 Modelado de Sistemas No Lineales
Las energıas cinetica y potencial del carro (Vc y Uc), de la varilla (Vv y Uv) y de laesfera (Ve y Ue) se formulan como:
Vc =1
2mcz
2 Uc = 0
Vv =1
2Jv θ
2 +1
2mv z
2v +
1
2mvy
2v Uv = mvg
lv2
cosθ
Ve =1
2Jeθ
2 +1
2mez
2e +
1
2mey
2e Uv = mvg
le2
cosθ (5.55)
La funcion lagrangiana L tiene en cuenta las energıas formuladas:
L = V − U = (Vc + Vv + Ve) − (Uc + Uv + Ue)
Reemplazando las relaciones de (5.82) en L se obtiene:
L =1
2mcz
2 +1
2(Jv + Je)θ
2 +1
2mv(z
2 + lv zcosθθ +l2v4
θ2)
+1
2me(z
2 + 2lezcosθθ + l2e θ2)
− mvglv2
cosθ − meglecosθ (5.56)
Las ecuaciones de Lagrange para los grados de libertad z y θ del pendulo invertidose formulan como:
d
dt
∂L
z− ∂L
z= F (5.57)
d
dt
∂L
θ− ∂L
θ= 0 (5.58)
Operando en (5.57) y en (5.58) resulta en la siguientes expresiones:
(mc + me + mv)z − (mele + mvlv2
)(sen θ)θ2 + (mele + mvlv2
)(cos θ)θ = F (5.59)
(Je+Jv +mel2e +
1
4mvl
2v)θ−(mele+mv
lv2
)g(sen θ)+(mele+mvlv2
)z(cos θ) = 0 (5.60)
Los momentos de inercia de la esfera y de la varilla con respecto al eje de rotaciondel pendulo son:
Je = mel2e ; Jv = mv
l2v3
(5.61)
Modelo del Subsistema Motor-Polea
El subsistema motor–polea esta representado en la Fig. 5.11. El modelo del sistemaelectrico se encuentra aplicando la ley de voltajes de Kirchhoff a la parte electrica dedicha figura. Ademas, debido a que la inductancia en servomotores DC de magnetopermanente es pequena, podemos despreciar su efecto en el modelo. Ası obtenemos:
Raia + Vb = KA u = Va (5.62)

5.5 Pendulo Invertido Traslacional (PIT) 145
@1@1@@1@1@A1A1AA1A1AB1B1BB1B1BC1C1CC1C1C
D1D1D1DD1D1D1DE1E1E1EE1E1E1EF1F1F1FF1F1F1FG1G1GG1G1G
i
N
T
R
L
u
BJ
v
T
a
a a
b
g1mm
1
m
θω
mm
2N Tg2BgJg
+
_
+
_KA
pr
F
pB
J pθω
Fig. 5.11: Subsistema motor–polea.
El voltaje contraelectromotriz esta representado por:
Vb = Kbθm (5.63)
Aplicando la segunda ley de Newton para el movimiento rotatorio en el sistemamecanico del servomotor, obtenemos:
Tm = Jeq θm + Beq θm + n F rp n =N1
N2< 1 (5.64)
donde:
Jeq = Jm + n2(Jo + Jp) (5.65)
Beq = Bm + n2Bo (5.66)
El torque producido en el eje del servomotor viene dado por la ecuacion:
Tm = Kmia (5.67)
Reemplazando la ecuacion (5.67) en (5.64) y despejando ia se obtiene:
ia =Jeq
Kmθm +
Beq
Kmθm +
n rp
KmF (5.68)
Luego, substituyendo las ecuaciones (5.68) y (5.63) en (5.62) y despejando F obten-emos:
F =KmKA
Ran rpu − Jeq
n rpθm −
(Beq
n rp+
KmKb
Ran rp
)θm (5.69)
Para transformar el desplazamiento angular del servomotor en el desplazamientohorizontal del carro en funcion del radio de la polea y del factor de reduccion delservomotor, empleamos:
θm =z
n rp(5.70)
Substituyendo (5.70) en (5.69) obtenemos la ecuacion general del subsistema servo-motor, como sigue:
F =KmKA
Ran rpu − Jeq
n2 r2p
z −(
Beq
n2 r2p
+KmKb
Ran2 r2p
)z (5.71)

146 Modelado de Sistemas No Lineales
Las ecuaciones (5.59), (5.60) y (5.71) representan el modelo matematico del sis-tema pendulo invertido controlado por la corriente de armadura. Tales ecuacionespueden ser escritas en forma compacta:
M1z − M2(sen θ)θ2 + M2(cos θ)θ − F = 0 (5.72)
M2g(sen θ) − M2z(cos θ) − J1θ = 0 (5.73)
F = Kx KA u − J2z − Bxz (5.74)
donde:
M1 = mc + me + mv; M2 = mele + mvlv2
J1 = Je + Jv + mel2e +
1
4mvl
2v; J2 =
Jeq
n2r2p
Kx =Km
Ranrp; Bx =
Beq
n2r2p
+KbKm
n2r2pRa
Representacion en el Espacio de Estado
Las ecuaciones obtenidas pueden ser representadas en el espacio de estado me-diante la siguiente asignacion de variables de estado:
x1 = θ x2 = θ x3 = z x4 = z (5.75)
x1 = x2 x2 = θ x3 = x4 x4 = z
Reemplazando (5.72) en (5.72), (5.72) y (5.72), y operando convenientemente se puededemostrar que la ecuacion de estado no lineal del sistema es:
x1
x2
x3
x4
=
x2M2(sin x1)(cos x1)x2
2+Bx(cos x1)x4+(M1+J2)g(sin x1)−Kx(cos x1)KA u(M2(cos2 x1)−(M1+J2)J1)/M2
x4−M2
2 g(sin x1)(cos x1)−J1M2(sin x1)x22+J1Bxx4+J1KxKA u
M22 (cos2 x1)−(M1+J2)J1
(5.76)
y puesto que en nuestro sistema tenemos como salidas disponibles el desplazamientoangular de la varilla x1 y el desplazamiento del carro x3, la ecuacion de salida tomala forma siguiente:
y = Cx (5.77)
donde:
y =
[y1
y2
]=
[x1
x3
]C =
[1 0 0 00 0 1 0
]x =
x1
x2
x3
x4

5.6 Grua Puente (GPT) 147
Obtencion de la Ecuacion de Estado Lineal
Para obtener la ecuacion de estado lineal del sistema pendulo invertido descritoen (5.76) se puede emplear el metodo Jacobiano detallado en la subseccion 2.6.2. Sinembargo, es comun en sistemas mecatronicos emplear aproximaciones de los terminosno lineales, las cuales nos permiten determinar el modelo lineal del sistema evitan-do operaciones tediosas. Para el caso que nos ocupa, podemos usar las siguientesaproximaciones cuando x1, x2, x3 y x4 se consideran pequenas:
senx1∼= x1 cosx1
∼= 1 x22∼= 0 cos2x1
∼= 1 (5.78)
Reemplazando tales aproximaciones en en (5.76) resulta:
x = Ax + Bu (5.79)
donde:
A =
0 1 0 0(M1+J2)M2g
(M1+J2)J1−M22
0 0 BxM2
(M1+J2)J1−M22
0 0 0 1−M2
2 g
(M1+J2)J1−M22
0 0 −J1Bx
(M1+J2)J1−M22
B =
0−KxM2KA
(M1+J2)J1−M22
0J1KxKA
(M1+J2)J1−M22
C =
[1 0 0 00 0 1 0
]
5.6. Grua Puente (GPT)
El modelado del sistema grua puente es similar al caso del pendulo invertidotraslacional. La unica variante es que en este caso el pendulo debe apuntar haciaabajo, tal como se muestra en la Fig. 5.12. Al igual que en el caso del penduloinvertido, para mayor facilidad, se le ha subdividido en dos subsistemas: carro–varillay motor–polea.
Modelo del Subsistema Carro–Varilla
El subsistema carro–varilla se muestra en la Fig. 5.13. De tal Fig. podemos ob-servar que las coordenadas de los centros de masa de la varilla de masa mv y de laesfera de masa me son: De dicha figura podemos observar que los centros de gravedadde la varilla y de la esfera son:
zv = z − lv2
sen θ yv = − lv2
cos θ (5.80)
ze = z − lesen θ ye = −le cos θ (5.81)
Las energıas cinetica y potencial del carro (Vc y Uc), de la varilla (Vv y Uv) y de laesfera (Ve y Ue) se formulan como:
Vc =1
2mcz
2 Uc = 0

148 Modelado de Sistemas No Lineales
u
y
z F
Carro
Fuerza decontrol
-
+
ServomotorD.C.
y’
θGrua puente’
Fig. 5.12: Sistema grua–puente.
H>HH>HH>HI>II>II>I
P
l v
zF
l em
vg
m e g
l v2
θ
z
y’y
0z’
Fig. 5.13: Subsistema carro–varilla de la grua–puente.
Vv =1
2Jv θ
2 +1
2mv z
2v +
1
2mvy
2v Uv = mvg
lv2
cosθ
Ve =1
2Jeθ
2 +1
2mez
2e +
1
2mey
2e Uv = mvg
le2
cosθ (5.82)
La funcion lagrangiana L se formula:
L = V − U = (Vc + Vv + Ve) − (Uc + Uv + Ue)
Las ecuaciones de Lagrange para los grados de libertad z y θ de la grua–puente seformulan como:
d
dt
∂L
z− ∂L
z= F (5.83)
d
dt
∂L
θ− ∂L
θ= 0 (5.84)

5.6 Grua Puente (GPT) 149
Operando en (5.83) y en (5.84) resulta en la siguientes relaciones:
(mc + me + mv)z + (mele + mvlv2
)(sen θ)θ2 − (mele + mvlv2
)(cos θ)θ = F (5.85)
(Je + Jv)θ − (mele + mvlv2
)z(cos θ) + (mele + mvlv2
)g(sen θ) = 0 (5.86)
donde:
Je = mel2e ; Jv = mv
l2v3
Modelo del Subsistema Motor-Polea
Este subsistema es el mismo que se desarrollo para el pendulo invertido en lasubseccion 5.5, ecuacion (5.71):
F =KmKA
Ran rpu − Jeq
n2 r2p
z −(
Beq
n2 r2p
+KmKb
Ran2 r2p
)z
Las ecuaciones (5.85), (5.86) y (5.71) representan el modelo matematico del sistemagrua–puente controlado por la corriente de armadura. Tales ecuaciones pueden serescritas en forma compacta como sigue:
M1z + M2(sen θ)θ2 − M2(cos θ)θ = F (5.87)
J1θ + M2g(sen θ) − M2z(cos θ) = 0 (5.88)
F = Kx KA u − J2z − Bxz (5.89)
donde:
M1 = mc + me + mv; M2 = mele + mvlv2
J1 = Je + Jv + mel2e +
1
4mvl
2v; J2 =
Jeq
n2r2p
Kx =Km
Ranrp; Bx =
Beq
n2r2p
+KbKm
n2r2pRa
Representacion en el Espacio de Estado
Las ecuaciones arriba obtenidas se representan en el espacio de estados mediantela siguiente asignacion de variables:
x1 = θ
x2 = θ
x3 = z
x4 = z
Escribiendo las ecuaciones en el espacio de estado:
x1
x2
x3
x4
=
x2−M2(sin x1)(cos x1)x2
2−Bx(cos x1)x4−(M1+J2)g(sin x1)+Kx(cos x1)KA u(−M2(cos2 x1)+(M1+J2)J1)/M2
x4−M2
2 g(sin x1)(cos x1)−J1M2(sin x1)x22−J1Bxx4+J1KxKA u
−M22 (cos2 x1)+(M1+J2)J1
(5.90)

150 Modelado de Sistemas No Lineales
y puesto que tenemos como salidas disponibles el desplazamiento angular de la varillay el desplazamiento del carro, tendremos entonces como ecuacion de salida la siguienteexpresion:
y = Cx (5.91)
donde:
C =
[1 0 0 00 0 1 0
](5.92)
Obtencion del Modelo Lineal
Para obtener el modelo lineal del sistema grua–puente, procedemos como en elcaso del pendulo invertido. Empleando las siguientes aproximaciones en (5.90):
senx1∼= x1 cosx1
∼= 1 x22∼= 0 cos2x1
∼= 1 (5.93)
Resulta en el siguiente modelo lineal de la grua–puente:
x = Ax + Bu (5.94)
donde:
A =
0 1 0 0−(M1+J2)M2g(M1+J2)J1−M2
20 0 −BxM2
(M1+J2)J1−M22
0 0 0 1−M2
2 g
(M1+J2)J1−M22
0 0 −J1Bx
(M1+J2)J1−M22
B =
0KxM2KA
(M1+J2)J1−M22
0J1KxKA
(M1+J2)J1−M22
C =
[1 0 0 00 0 1 0
]
Resumen de Variables y Parametros
La tabla 5.3 muestra las variables y parametros para los sistemas pendulo in-vertido y grua-puente. Los valores de los parametros se obtuvieron de las hojas deespecificaciones y por medicion.
5.7. Manipulador Robotico Traslacional (MRT)
Descripcion del Sistema
La Fig. 5.14 ilustra el manipulador robotico traslacional (MRT) de 2 GDL, mien-tras que la Fig. 5.15 muestra el esquema de estudio de este sistema, en donde M1 esun servomotor DC que posee un mecanismo de reduccion por engranajes y un deco-dificador optico y esta articulado a una polea de radio rp. Esta polea usa un cablepara transmitir la fuerza F para accionar el movimiento de traslacion de un carro demasa mc montado sobre un par de rieles a lo largo de un eje x. M2 es tambien unservomotor similar a M1, empleado para accionar el movimiento rotatorio del brazo

5.7 Manipulador Robotico Traslacional (MRT) 151
Tabla 5.3: Variables y parametros valorados para los sistemas pendulo invertido ygrua-puente.
Sımbolo Descripcion Valor/Formula
θ posicion angular de la varilla
F fuerza aplicada al carro
θm posicion angular del motor
z posicion del carro
lv longitud de la varilla 0.767 m
le distancia entre P y la esfera
ze componente horizontal
zv componente horizontal
g gravedad 9.8 N
me masa de la esfera no usado
mv masa de la varilla 0.063095 kg
mc masa del carro 0.92 kg
mp masa de la polea 0.2 kg
KA ganancia del amplificador 14.9
Ra resistencia del motor 7.38 ohm
La inductancia del motor se desprecio
Kb constante contraelectromotriz 31.0352×10−3 V/rad
Km constante de torque del motor 31.071×10−3 N-m/A
Jm inercia del eje primario del motor 1.9596×10−6 kg-m2
Bm friccion viscosa del eje primario 1.8342×10−3 N-m/rad/s
Jo inercia del eje secundario se desprecio
Bo friccion viscosa del eje secundario se desprecio
n factor de reduccion de velocidad 1/19.741
rp radio de la polea 0.0648 m
Jp inercia de la polea mpr2p/2
Jeq momento de inercia equivalente Jm + n2(Jo + Jp)
Beq friccion viscosa equivalente Bm + n2Bo
Je momento de inercia de la esfera mel2e
Jv momento de inercia de la varilla mvl2v/3
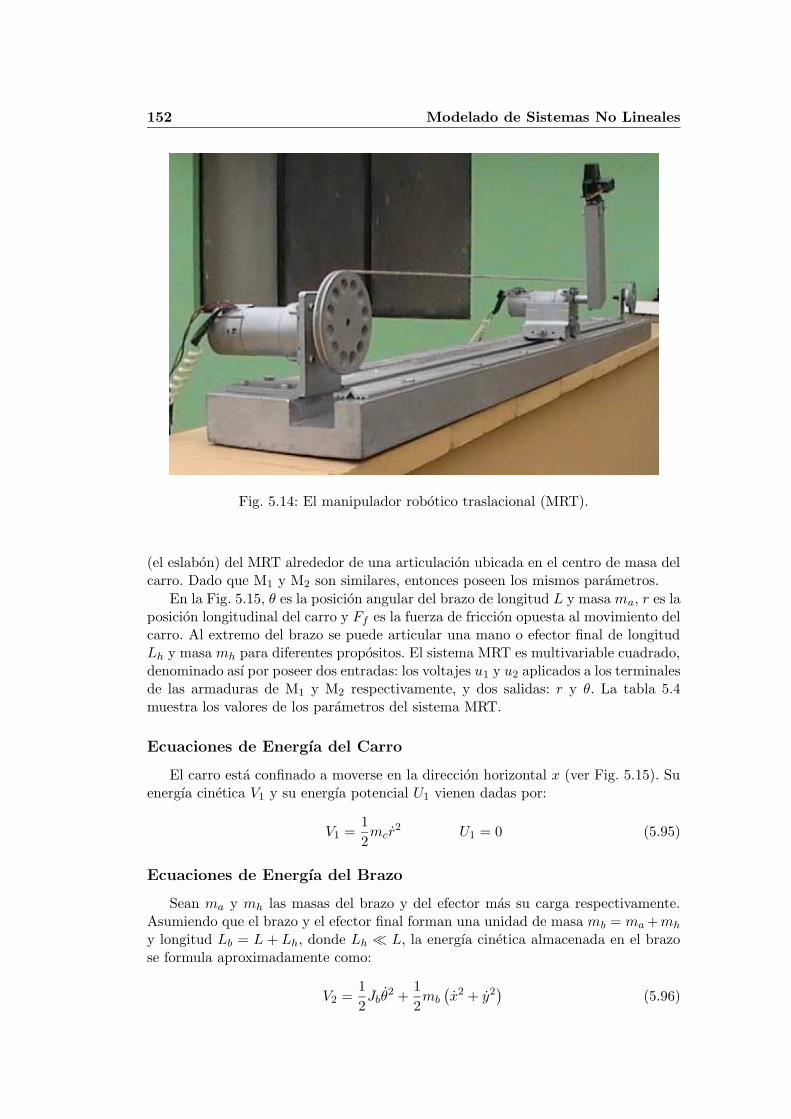
152 Modelado de Sistemas No Lineales
Fig. 5.14: El manipulador robotico traslacional (MRT).
(el eslabon) del MRT alrededor de una articulacion ubicada en el centro de masa delcarro. Dado que M1 y M2 son similares, entonces poseen los mismos parametros.
En la Fig. 5.15, θ es la posicion angular del brazo de longitud L y masa ma, r es laposicion longitudinal del carro y Ff es la fuerza de friccion opuesta al movimiento delcarro. Al extremo del brazo se puede articular una mano o efector final de longitudLh y masa mh para diferentes propositos. El sistema MRT es multivariable cuadrado,denominado ası por poseer dos entradas: los voltajes u1 y u2 aplicados a los terminalesde las armaduras de M1 y M2 respectivamente, y dos salidas: r y θ. La tabla 5.4muestra los valores de los parametros del sistema MRT.
Ecuaciones de Energıa del Carro
El carro esta confinado a moverse en la direccion horizontal x (ver Fig. 5.15). Suenergıa cinetica V1 y su energıa potencial U1 vienen dadas por:
V1 =1
2mcr
2 U1 = 0 (5.95)
Ecuaciones de Energıa del Brazo
Sean ma y mh las masas del brazo y del efector mas su carga respectivamente.Asumiendo que el brazo y el efector final forman una unidad de masa mb = ma +mh
y longitud Lb = L + Lh, donde Lh L, la energıa cinetica almacenada en el brazose formula aproximadamente como:
V2 =1
2Jbθ
2 +1
2mb
(x2 + y2
)(5.96)

5.7 Manipulador Robotico Traslacional (MRT) 153
Tabla 5.4: Parametros valorados del sistema MRT. La abreviatura CM significa Cen-tro de Masa.
Sımbolo Descripcion Valor Unidades
u1, u2 Voltaje de entrada al sistema V
KA Ganancia del amplificador 8.5
Va1, Va2, Voltaje de armadura V
Ra Resistencia de armadura 3.5 Ω
La Inductancia de armadura 0.002 H
ia1, ia2 Corriente de armadura A
Km Constante del torque motor 0.0421 N-m/A
Tm1, Tm2 Torque motor N-m
Tg1, Tg2 Torque en los engranajes N-m
T Torque de carga N-m
Jm Momento de inercia del motor 0.0003 kg-m2
Jg Momento de inercia de los engranajes 0.053 kg-m2
Jp Momento de inercia de la polea kg-m2
Jb Momento de inercia del brazo kg-m2
Jeq Momento de inercia equivalente kg-m2
Beq Constante de friccion equivalente N-m-s/rad
Bm Constante de friccion del motor 0.0001 N-m/rad/s
Bg Constante de friccion engranajes 0.01 N-m-s/rad
Bp Constante de friccion en la polea 0.006 N-m-s/rad
F Fuerza aplicada al carro N
Ff Fuerza de rozamiento (Ff = Fc r) N
Fc Constante de friccion del carro 2.81 kg/s
mh Masa del efector 0.15 kg
ma Masa del brazo 0.8 kg
mc Masa del carro 0.95 kg
mp Masa de la polea 0.3 kg
rp Radio de la polea 0.05 m
r Posicion del carro m
L Longitud del brazo m
Lb Longitud del brazo mas efector 0.225 m
Vb1, Vb2 Voltajes contraelectromotrices V
Kb Constante contraelectromotriz 0.0565 V-s/rad
g Aceleracion de la gravedad 9.81 m/s2
N1, N2 No de dientes de los engranajes N2 > N1
n Relacion de engranajes (n = N2/N1) 12.5
θ, θm Posicion angular: brazo y motor rad
ω, ωm Velocidad angular: carga y motor rad/s

154 Modelado de Sistemas No Lineales
JKJJKJJKJLKLLKLLKL MKMMKM
MKMNKNNKNNKN
OKOKOOKOKOOKOKOPKPKPPKPKPPKPKP
QKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQKQRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRKRFf
r
M2
1M
x
y
θ mp
rp
mh
PIVOTE
POLEA cos
θsenbL
Lb θBRAZO
CARRO
F
FINALEFECTOR
L h
aLm a
Fig. 5.15: El manipulador robotico traslacional (MRT).
De acuerdo a la Fig. 5.15:
x = r +Lb
2sen θ y =
Lb
2cos θ (5.97)
El momento de inercia Jb, segun la referencia [6], se calcula como:
Jb =1
3mbL
2b mb = ma + mh Lb = La + Lh (5.98)
La energıa potencial almacenada en el brazo se puede expresar como:
U2 = mbgLb
2cosθ (5.99)
Las Ecuaciones de Lagrange del MRT
Reemplazando (5.97) en (5.96), efectuando las operaciones indicadas y simplifi-cando, la funcion de Lagrange L = V − U = (V1 + V2) − (U1 + U2) toma la forma:
L =1
2(mc + mb)r
2 +1
2
(Jb +
L2b
2
)θ2 − 1
2mbLbrθ cos θ − 1
2mbLbg cos θ (5.100)
Las ecuaciones de Lagrange para las coordenadas generalizadas r y θ del MRT seformulan como:
d
dt
(∂L
∂r
)− ∂L
∂r= F − Ff
(5.101)
d
dt
(∂L
∂θ
)− ∂L
∂θ= T (5.102)
donde F es la fuerza generada para mover al carro, Ff es la fuerza de friccion actuandosobre las ruedas del carro, Fc es la constante de friccion y T es el torque generado
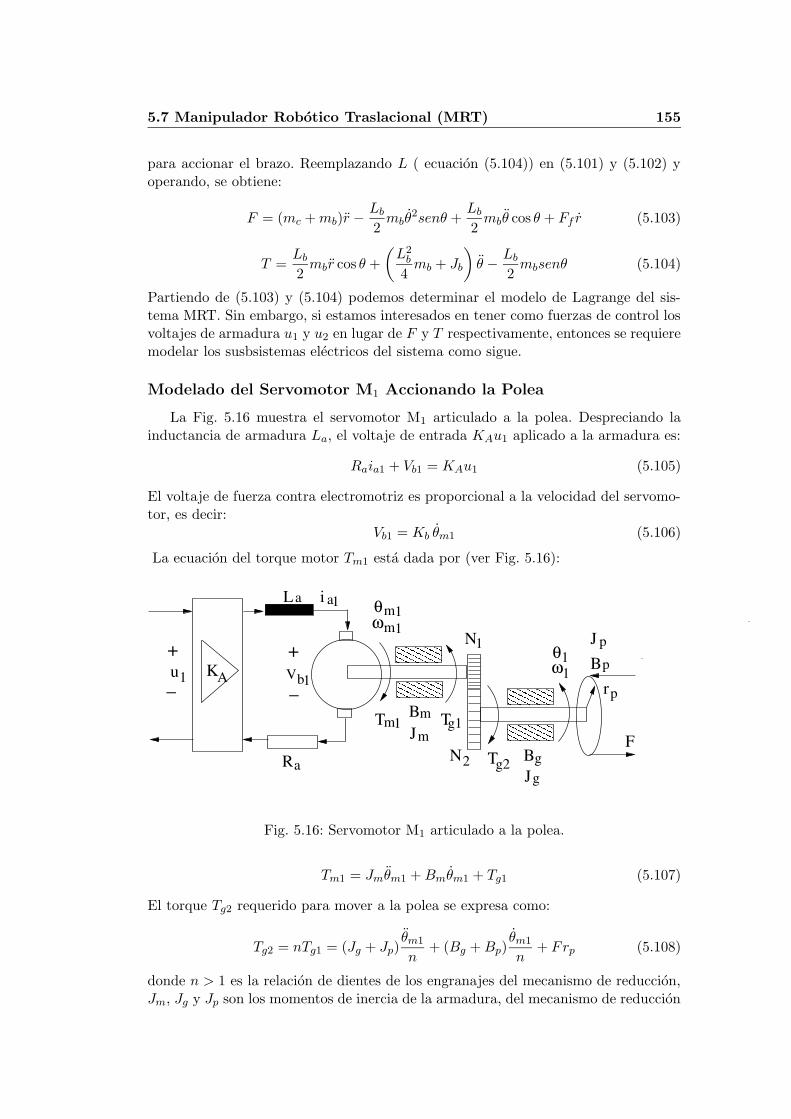
5.7 Manipulador Robotico Traslacional (MRT) 155
para accionar el brazo. Reemplazando L ( ecuacion (5.104)) en (5.101) y (5.102) yoperando, se obtiene:
F = (mc + mb)r −Lb
2mbθ
2senθ +Lb
2mbθ cos θ + Ff r (5.103)
T =Lb
2mbr cos θ +
(L2
b
4mb + Jb
)θ − Lb
2mbsenθ (5.104)
Partiendo de (5.103) y (5.104) podemos determinar el modelo de Lagrange del sis-tema MRT. Sin embargo, si estamos interesados en tener como fuerzas de control losvoltajes de armadura u1 y u2 en lugar de F y T respectivamente, entonces se requieremodelar los susbsistemas electricos del sistema como sigue.
Modelado del Servomotor M1 Accionando la Polea
La Fig. 5.16 muestra el servomotor M1 articulado a la polea. Despreciando lainductancia de armadura La, el voltaje de entrada KAu1 aplicado a la armadura es:
Raia1 + Vb1 = KAu1 (5.105)
El voltaje de fuerza contra electromotriz es proporcional a la velocidad del servomo-tor, es decir:
Vb1 = Kb θm1 (5.106)
La ecuacion del torque motor Tm1 esta dada por (ver Fig. 5.16):
SKSKSSKSKSTKTKTTKTKTUKUKUUKUKUVKVKVVKVKV
WKWKWKWWKWKWKWWKWKWKWXKXKXKXXKXKXKXXKXKXKXYKYKYKYYKYKYKYYKYKYKYZKZKZZKZKZZKZKZ
i
N
T
R
L
u
BJ
T
a
a a
b
g1mm
1
m
θω
mm
2N Tg2Jg
+
_
+
_KA
pr
F
pBθω
1
111
11
Bg
J p
1
1
V
Fig. 5.16: Servomotor M1 articulado a la polea.
Tm1 = Jmθm1 + Bmθm1 + Tg1 (5.107)
El torque Tg2 requerido para mover a la polea se expresa como:
Tg2 = nTg1 = (Jg + Jp)θm1
n+ (Bg + Bp)
θm1
n+ Frp (5.108)
donde n > 1 es la relacion de dientes de los engranajes del mecanismo de reduccion,Jm, Jg y Jp son los momentos de inercia de la armadura, del mecanismo de reduccion

156 Modelado de Sistemas No Lineales
y de la polea respectivamente, mientras que Bm, Bg y Bp son las constantes defriccion de la armadura, del mecanismo de reduccion y de la polea respectivamente.La relacion Tg2 = nTg1 se obtiene asumiendo que los engranajes son ideales. En estasituacion, el principio de conservacion de energıa requiere que:
Tg1θm1 = Tg2θm1
n
Asumiendo que la polea es un disco que gira sobre su eje, su momento de inercia sepuede calcular como:
Jp = mpr2p/2; (5.109)
El torque servomotor Tm1 es proporcional a ia1:
Tm1 = Kmia1 (5.110)
El movimiento rotacional de la polea se puede transformar en el movimiento trasla-cional del carro usando la relacion (ver Fig. 5.16):
r =θm1
nrp (5.111)
Usando las ecuaciones (5.105), (5.106), (5.107), (5.108), (5.110) y (5.111) se obtiene:
F =KmKA
rpRau1 −
Jeq1
nr2p
r −(
Beq1
nr2p
+nKmKb
nr2p
)r (5.112)
donde:Jeq1 = n2Jm + Jg + Jp Beq1 = n2Bm + Bg + Bp
Modelado del Servomotor M2 Accionando el Brazo
La Fig. 5.17 muestra al servomotor M2 articulado al punto pivote localizado enel centro de masa del carro. Sabemos que M1 y M2 poseen los mismos parametrospor ser similares. Despreciando la inductancia de armadura La, podemos formular:
Raia2 + Vb2 = KAu2 (5.113)
donde:Vb2 = Kbnθ (5.114)
La ecuacion del torque motor Tm2 es (ver Fig. 5.17):
Tm2 = Jmnθ + Bmnθ + Tg1 (5.115)
El torque Tg2 requerido para mover el brazo se expresa como:
Tg2 = nTg1 = Jg θ + Bg θ + T (5.116)
donde T es el torque de carga. El torque motor Tm2 es proporcional a ia2:
Tm2 = Kmia2 (5.117)
Empleando las ecuaciones (5.113), (5.114), (5.115), (5.116) y (5.117) se puede de-mostrar que:
T = −Jeq2θ −(
Beq2 +n2KmKb
Ra
)θ +
nKmKA
Rau2 (5.118)
donde:Jeq2 = n2Jm + Jg Beq2 = n2Bm + Bg

5.7 Manipulador Robotico Traslacional (MRT) 157
[[[[[[\\\\\\]]]]]]^^^^^^
____________`````````aaaaaaaabbbbbbbb
i
N
T
R
L
u
BJ
T
a
a a
g1mm
1
m
θω
mm
2N Tg2Jg
+
_
+
_KA
Bg
2
2
2 2b
θω
ArticulaciónV
Fig. 5.17: Servomotor M2 articulado al punto pivote del carro
Modelo Dinamico de Lagrange del MRT
Igualando (5.103) con (5.112) y (5.104 ) con(5.118) el modelo de Lagrange delsistema MRT toma la forma:
u1 = M11r + M12θ + P11r + P12θ (5.119)
u2 = M21r + M22θ + P22θ + d21 (5.120)
Las ecuaciones (5.119) y (5.120) se pueden transformar en su forma matricial comosigue:
M(q)q+P(q, q)q+d(q) = u q =
[q1
q2
]=
[rθ
]u =
[u1
u2
](5.121)
donde:
M =
[M11 M12
M21 M22
]P =
[P11 P12
0 P22
]d(q) =
[0
d21
]
M11 =Rarp
nKmKA
(mc + mb +
Jeq
r2p
)
M12 =RarpmbLb
2nKAKmcos θ
M21 =RambLb
2nKmKAcos θ
M22 =Ra
nKAKm
(mbL
2b
4+ Jb + Jeq
)
P11 =Rarp
nKmKA
(Fc +
Beq
r2p
+n2KmKb
Rar2p
)
P12 = −RarpmbLb
2nKAKmθsenθ
P22 =Ra
nKAKm
(Beq +
n2KmKb
Ra
)
d21 = −RambLbg
2nKAKmsenθ

158 Modelado de Sistemas No Lineales
Ecuacion de Estado del MRT
Seleccionemos como variables de estado: x1 = r, x2 = θ, x3 = r y x4 = θ. Porconsiguiente, las dos primeras ecuaciones de estado son: x1 = x3, x2 = x4. Las otrasdos ecuaciones de estado no lineales se deducen despejando q = [x3 x4]
T de (5.121),resultando:
x3 = M22(−P11x3 − P12x4 + u1)/den − M12(−P22x4 − d21 + u2)/den
x4 = −M21(−P11x3 − P12x4 + u1)/den + M11(−P22x4 − d21 + u2)/den
den = M11M22 − M12M21 (5.122)
Haciendo en la ecuacion (5.121) las aproximaciones siguientes: cos θ ∼= 1 en M12 yM21, θsenθ ∼= θθ ∼= 0 en P12 y senθ ∼= θ en d21, la ecuacion de estado lineal delsistema MRT resulta:
x = Ax + Bu y = Cx (5.123)
donde:
A =1
den
0 0 1 00 0 0 1
0 M12d21 −M22P 11 −(M22P 12 − M12P 22)
0 −M11d21 M21P 11 (M22P 12 − M11P 22)
B =1
den
0 00 0
M22 −M12
−M21 M11
C =
[1 0 0 00 1 0 0
]den = M11M22−M12M21
En las relaciones anteriores:
M11 = M11 M12 =RarpmbLb
2nKAKm
M21 =RambLb
2nKmKAM22 = M22
P 11 = P11 P 12 = 0
P 22 = P22 d21 = −RambLbg
2nKAKm
5.8. Manipulador Robotico Esferico de 2GDL (MRE)
Descripcion del MRE
La Fig. 5.18 muestra el sistema prototipo Manipulador Robotico Esferico (MRE).Su esquema para estudio se ilustra en la Fig. 5.19, donde M1 es un servomotor DCcon decodificador optico que acciona el movimiento rotatorio de una base metalica(la base del MRE) articulada a su eje. Esta base comprende un disco metalico deespesor d y radio rd unido a una barra metalica de longitud b, seccion a2 y masa mb.La barra y el disco conforman un cuerpo rıgido con movimiento rotatorio alrededordel eje z, donde L1 es la distancia del CM (centro de masa) de la base con respecto

5.8 Manipulador Robotico Esferico de 2GDL (MRE) 159
al origen del sistemas de coordenadas (x, y, z). M2 es un servomotor montado en elextremo libre de la barra similar a M1 y se emplea para accionar el movimiento derotacion de un brazo o eslabon de longitud L (el brazo del manipulador) y masa ma.Ya que M1 y M2 son similares, entonces poseen los mismos parametros.
Fig. 5.18: El manipulador robotico esferico (MRE).
En el esquema del sistema MRE (Fig. 5.19), q1 y q2 son las posiciones angularesde la base y del brazo respectivamente. Al extremo del brazo se puede articular unefector final de masa mh. El manipulador MRE representa un sistema multivariablecuadrado, denominado ası por poseer dos entradas: los voltajes de control u1 y u2
aplicados a los terminales de armaduras de M1 y M2 respectivamente, y dos salidas:q1 y q2. La tabla 5.6 muestra los valores de los parametros del manipulador.
Ecuaciones de Energıa del MRE
Ecuaciones de Energıa de la Base
La base esta confinada a girar alrededor del eje z (ver Fig. 5.19). Su energıacinetica V1 y su energıa potencial U1 vienen dadas por:
V1 =1
2J1q
21 U1 = m1g L1 (5.124)
donde:
m1 = md + mb L1 =mbb + mdd
mb + md(5.125)
y el momento de inercia J1 resulta de la suma de los momentos de inercia del disco(Jd) y de la barra (Jb) alrededor del eje z, como sigue [6]:
J1 = Jd + Jb =1
2mdr
2d +
1
12mb(a
2 + a2) (5.126)

160 Modelado de Sistemas No Lineales
Tabla 5.5: Variables y parametros del sistema MRE (CM: centro de masa).
Sımbolo Descripcion Valor Unidad
q1 Posicion angular de la base rad
q2 Posicion angular del brazo rad
T1, T2 Torques generados N-m
md Masa del disco 0.55 kg
mb Masa de la barra 0.9 kg
ma Masa del brazo o eslabon 0.8 kg
mh Masa del efector final 0.15 kg
m2 Masa equivalente del brazo kg
d Espesor del disco 0.01 m
rd Radio del disco 0.06 m
b Longitud de la barra 0.25 m
a2 Seccion cuadrada de la barra 0.044 2 m2
M1, M2 Servomotores D.C.
L Longitud del brazo 0.3 m
Lh Longitud del efector 0.05 m
L1 Ubicacion CM de la base m
L2 Longitud equivalente del brazo m
Jh Momento de inercia del efector kg-m2
Jm Momento de inercia de M1 y M2 0.0003 kg-m2
Jeq Momento de inercia equivalente kg-m2
Jg1, Jg2 Momentos de inercia de los engranajes 0.053 kg-m2
J1, J2 Momentos de inercia de la base y del brazo kg-m2
Bm Constante de friccion de M1 y M2 0.0001 N-m-s/rad
Beq Constante de friccion equivalente N-m-s/rad
Bg1, Bg2 Constantes de friccion en engranajes 0.01 N-m-s/rad
n Relacion de engranajes de M1 y M2 12.5
Ra Resistencia de armadura de M1 y M2 3.5 Ω
La Inductancia de armadura de M1 y M2 0.00015 H
Vb1, Vb2 Voltajes contra electromotrices V
Va1, Va2 Voltajes de armadura V
ia1, ia2 Corrientes de armadura A
KA Ganancia del amplificador 8.5
Km Constante del servomotor 0.0421 N-m/A
Kb Constante contra electromotrız 0.0565 V-s/rad
u1, u2 Voltajes de control V
g Constante gravitacional 9.81 m/s2

5.8 Manipulador Robotico Esferico de 2GDL (MRE) 161
x
y
b
a
q2L
da
md
a
q1
L1
mb
zEFECTORFINAL
m h
BASE
m
BRAZO
SERVOMOTORM2
SERVOMOTORM1
rd
hL
Fig. 5.19: Esquema del manipulador robotico esferico (MRE).
Ecuaciones de Energıa del Brazo
Sean ma y mh las masas del brazo y del efector mas su carga respectivamente.Asumiendo que el brazo y el efector final forman una unidad de masa m2 = ma +mh
y longitud L2 = L + Lh, donde Lh L, la energıa cinetica almacenada en el brazose formula aproximadamente como:
V2 =1
2J2q
22 +
1
2m2
(x2 + y2 + z2
)(5.127)
De acuerdo a la Fig. 5.19:
x =L2
2sen q2 cos q1 y =
L2
2sen q2 sin q1 z = d + b +
L2
2cos q2 (5.128)
El momento de inercia J2, segun la referencia [6], se calcula como:
J2 =1
3m2L
22 m2 = ma + mh L2 = L + Lh (5.129)
La energıa potencial almacenada en el brazo se puede expresar como:
U2 = m2g
(L2
2cos q2 + b + d
)(5.130)
Modelo Dinamico de Lagrange del MRE
Reemplazando (5.128) en (5.127), efectuando las operaciones indicadas y simpli-ficando, la funcion de Lagrange L = V − U = (V1 + V2) − (U1 + U2) toma la forma:
L =1
2J1q
21 +
1
2J2q
22 +
1
8m2L2
(q22 + q2
1sen2q2
)

162 Modelado de Sistemas No Lineales
− m1gL1 − m2g
(d + b +
L2
2cos q2
)(5.131)
Las ecuaciones de Lagrange para las coordenadas generalizadas q1 y q2 del MRE seformulan como:
d
dt
(∂L
∂q1
)− ∂L
∂q1= T1 (5.132)
d
dt
(∂L
∂q2
)− ∂L
∂q2= T2 (5.133)
donde T1 y T2 son los torques generados para hacer girar la base y el brazo respecti-vamente. Reemplazando L en (5.132) y (5.133) y operando se obtiene:
(J1 +
1
4m2L2sen
2q2
)q1 +
(1
2m2L2senq2 cos q2
)q1q2 = T1 (5.134)
(J2 +
1
4m2L2
)q2 −
(1
4m2L2q
21senq2 cos q2 +
1
2m2L2gsenq2
)= T2 (5.135)
Partiendo de (5.132) y (5.133) podemos determinar el modelo de Lagrange del mo-delo MRE. Sin embargo, si estamos interesados en tener como fuerzas de controllos voltajes de armadura u1 y u2 en lugar de T1 y T2 respectivamente, entonces serequiere modelar los susbsistemas electricos del sistema MRE como sigue.
Modelado del Servomotor M1 Accionando la Base
La Fig. 5.20 muestra al servomotor M1 articulado al punto pivote en contactocon el disco de la base. Sabemos que M1 y M2 poseen los mismos parametros por sersimilares. Despreciando la inductancia de armadura La, podemos formular (ver Fig.5.20):
Raia1 + Vb1 = KAu1 (5.136)
donde:Vb1 = Kbqm1 = Kbnq1 qm1 = nq1 (5.137)
donde n = N2/N1 > 1 es la relacion de dientes de los engranajes del mecanismo dereduccion. La ecuacion del torque motor Tm1 es (ver Fig. 5.20):
Tm1 = Jmnq1 + Bmnq1 + Tg1 (5.138)
El torque Tg2 requerido para mover la base se expresa como:
Tg2 = nTg1 = Jg q1 + Bg q1 + T1 (5.139)
donde Jm y Jg son los momentos de inercia del motor y del mecanismo de reduccionrespectivamente, mientras que Bm y Bg son las constantes de friccion del motor ydel mecanismo de reduccion respectivamente. La relacion Tg2 = nTg1 se obtiene asu-miendo que los engranajes son ideales. En esta situacion, el principio de conservacionde energıa requiere que:
Tg1qm1 = Tg2qm1
nqm1 = nq1
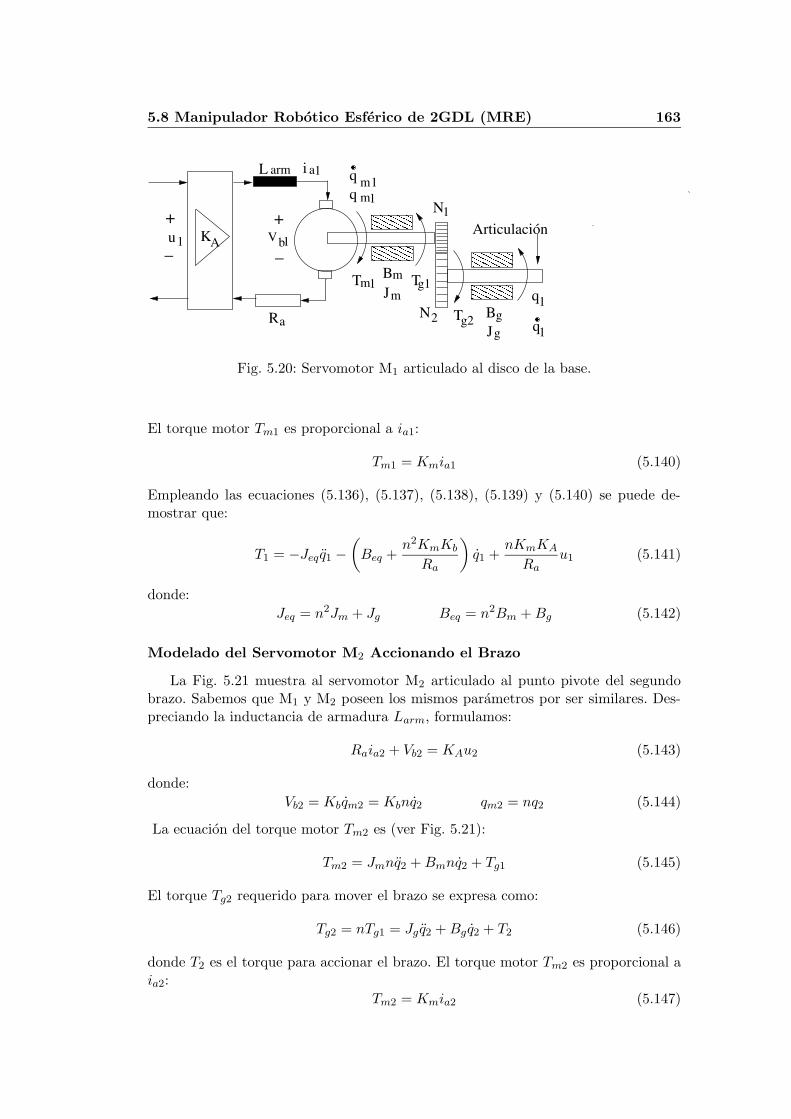
5.8 Manipulador Robotico Esferico de 2GDL (MRE) 163
cd
eeff
gggggghhhhhhiiiiiijjjjjj
kkkkkkkkkkkklllllllllmmmmmmmmnnnnnnnnN
T
R
u
BJ
T
a
g1mm
1
m
m
2N Tg2Jg
+
_
+
_KA
Bg
bArticulación
1 1
1
m
q1
q1
11
L i a1arm
V
Fig. 5.20: Servomotor M1 articulado al disco de la base.
El torque motor Tm1 es proporcional a ia1:
Tm1 = Kmia1 (5.140)
Empleando las ecuaciones (5.136), (5.137), (5.138), (5.139) y (5.140) se puede de-mostrar que:
T1 = −Jeq q1 −(
Beq +n2KmKb
Ra
)q1 +
nKmKA
Rau1 (5.141)
donde:
Jeq = n2Jm + Jg Beq = n2Bm + Bg (5.142)
Modelado del Servomotor M2 Accionando el Brazo
La Fig. 5.21 muestra al servomotor M2 articulado al punto pivote del segundobrazo. Sabemos que M1 y M2 poseen los mismos parametros por ser similares. Des-preciando la inductancia de armadura Larm, formulamos:
Raia2 + Vb2 = KAu2 (5.143)
donde:
Vb2 = Kbqm2 = Kbnq2 qm2 = nq2 (5.144)
La ecuacion del torque motor Tm2 es (ver Fig. 5.21):
Tm2 = Jmnq2 + Bmnq2 + Tg1 (5.145)
El torque Tg2 requerido para mover el brazo se expresa como:
Tg2 = nTg1 = Jg q2 + Bg q2 + T2 (5.146)
donde T2 es el torque para accionar el brazo. El torque motor Tm2 es proporcional aia2:
Tm2 = Kmia2 (5.147)

164 Modelado de Sistemas No Lineales
op
qqrr
sssssssssttttttttt
uuuuuuvvvvvv
wwwwwwwwxxxxxxyyyyyyyyyyyyzzzzzzzzzzzz
N
T
R
u
BJ
T
a
g1mm
1
m
m
N Tg2Jg
+
_
+
_KA
Bg
bArticulación
m
q
q2
2
2
2
22
22
2aiL arm
V
Fig. 5.21: Servomotor M2 articulado al punto pivote del brazo.
Empleando las ecuaciones (5.143), (5.144), (5.145), (5.146) y (5.147) se puede de-mostrar que:
T2 = −Jeq q2 −(
Beq +n2KmKb
Ra
)q2 +
nKmKA
Rau2 (5.148)
donde:Jeq = n2Jm + Jg Beq = n2Bm + Bg (5.149)
Modelo Dinamico del Manipulador MRE
Igualando (5.134) con (5.141) y (5.135) con (5.148) el modelo de Lagrange delsistema MRE toma la forma:
u1 = M11q1 + P11q1 + P12q2 (5.150)
u2 = M22q2 + P21q1 + P22q2 + d21 (5.151)
Manipulando las ecuaciones (5.150) y (5.151) se obtiene el modelo dinamico de La-grange del sistema:
M(q)q + P(q, q)q + d(q) = u q =
[q1
q2
]u =
[u1
u2
](5.152)
donde:
M =
[M11 00 M22
]P =
[P11 P12
P21 P22
]d =
[0
d21
]
M11 =Ra
nKmKA
(J1 + Jeq +
1
4m2L2sen
2q2
)
M22 =Ra
nKmKA
(J2 + Jeq +
1
4m2L2
)
P11 =Ra
nKmKA
(Beq +
n2KmKb
Ra
)

5.9 Manipulador Robotico Esferico de 3GDL (MRE3) 165
P12 =Ra
nKmKA
(1
2m2L2q1senq2 cos q2
)
P21 =Ra
nKmKA
(−1
4m2L2q1senq2 cos q2
)
P22 =Ra
nKmKA
(Beq +
n2KmKb
Ra
)
d21 =Ra
nKmKA
(−1
2m2L2gsenq2
)
Ecuacion de Estado No Lineal del Sistema MRE
Definiendo las siguientes variables de estado: x1 = q1, x2 = q2, x3 = q1 y x4 = q2,el modelo dinamico dado en (5.150) y (5.151) se puede transformar en la siguienteecuacion de estado del sistema MRE:
x1
x2
x3
x4
=
f1(x,u)f2(x,u)f3(x,u)f4(x,u)
=
x3
x4
M−111 (−P11x3 − P12x4 + u1)
M−122 (−P21x3 − P22x4 − d21 + u2)
(5.153)
5.9. Manipulador Robotico Esferico de 3GDL (MRE3)
Descripcion del MRE3
La Fig. 5.22 muestra el esquema del sistema prototipo Manipulador RoboticoEsferico de 3GDL (MRE3), donde M1 es un servomotor DC con decodificador optico,cuyo eje esta conectado al eje de la base del MRE3 mediante una faja de transmisionde movimiento. Esta base metalica posee la forma de un cilindro de masa m1, radiorb y longitud L1.
M2 es otro servomotor DC con decodificador optico montado aproximadamente enel CM del brazo del MRE3. Este brazo posee forma trapezoidal de ancho uniforme c,de masa m2 y longitud L2. El eje del servomotor M2 esta unido a otro eje de rotacionubicado en el CR del brazo, mediante dos engranajes con numeros de dientes N1 yN2, donde N2/N1 = m > 1 es la relacion de engranajes. El engranaje con N1 dientesesta montado en el eje del servomotor M2. El eje de rotacion del brazo esta unidomediante rodamientos al extremo superior de la base.
El antebrazo del MRE3, tambien de forma trapezoidal de ancho uniforme C y demasa me, posee un servomotor M3 con decodificador montado en su CM. Asimismo,el eje del servomotor M3 esta unido a otro eje de rotacion ubicado en el CR delAntebrazo, mediante dos engranajes con numeros de dientes N1 y N2, donde N2/N1
= m > 1 es la relacion de engranajes. El engranaje con N1 dientes esta montado enel eje del servomotor M3. Dado que M3, M3 y M3 son similares, entonces poseen losmismos parametros.
En el sistema de coordenadas del MRE3 (Fig. 5.23), q1, q2 y q2 son las posicionesangulares de la base, del brazo y del antebrazo, respectivamente. Observar que parapropositos de simplicidad, estamos considerando que el CM del antebrazo coincidecon su CR. Esta aproximacion es posible teniendo en cuenta que al extremo del brazose le articula un efector final de masa me y de longitud e de su CM. Este efector mueve

166 Modelado de Sistemas No Lineales
Antebrazo
EfectorCR2
CR3
Correa detransmisión
ServomotorM1
M 3
M2 final
Base
Brazo
CR 1
Fig. 5.22: El manipulador robotico esferico de 3GDL (MRE3).
el CM del antebrazo hacia el punto de giro, si se considera que el antebrazo y el efectoroperan como una sola unidad, como es en nuestro caso, para fines de deduccion delmodelo dinamico del MRE3.
El manipulador MRE3 representa un sistema multivariable cuadrado por poseertres entradas: los voltajes de control u1, u2 y u3 aplicados a los terminales de armadurade M1, M2 y M3, respectivamente, y tres salidas: q1, q2 y q3. La tabla 5.6 describelas variables y muestra los valores de los parametros del manipulador MRE3.
q
q
3
1
d 2
r2
c 3
q 2
c 2
d 3
ez
y
CM L 1
CM
CM
2
1
3
x
Fig. 5.23: Sistema de coordenadas del manipulador robotico esferico MRE3.

5.9 Manipulador Robotico Esferico de 3GDL (MRE3) 167
Tabla 5.6: Variables y parametros del manipilador MRE3. CM y CR significan centrode masa y centro de rotacion, respectivamente. El subındice i varıa del 1 al 3.
Sımbolo Descripcion Valor Unidad
qi Posicion angular (base, brazo y antebrazo) rad
TLi Torque generados por Mi N-m
Ti Torque generado (base, brazo y antebrazo) N-m
m1 Masa de la base 0.55 kg
m2 Masa del brazo 0.9 kg
ma Masa del antebrazo 0.8 kg
me Masa del efector final 0.15 kg
m3 Masa equivalente del antebrazo kg
L1 Longitud de la base 0.25 m
db diametro de la base 0.065 m
L2 Longitud/altura del brazo 0.36 m
r2 Longitud del CM al CR del brazo 0.03 m
c2 Longitud del CR del brazo 0.19 m
La Longitud/altura del antebrazo 0.27 m
c3 Longitud del CR del antebrazo 0.15 m
e Longitud del CM del efector 0.03 m
L3 Longitud equivalente del antebrazo m
a2 Base menor del brazo 0.06 m
b2 Base mayor del brazo 0.14 m
a3 Base menor del antebrazo 0.04 m
b3 Base mayor del antebrazo 0.12 m
c Ancho (espesor) del brazo/antebrazo 0.04 m
Mi Servomotor DC
Je Momento de inercia del efector kg-m2
Jm Momento de inercia de Mi 0.0003 kg-m2
Jeq Momento de inercia equivalente kg-m2
Jgi Momento de inercia de los engranajes 0.053 kg-m2
Ji Momento de inercia kg-m2
Bm Constante de friccion de Mi 0.0001 N-m-s/rad
Beq Constante de friccion equivalente N-m-s/rad
Bgi Constante de friccion en engranajes 0.01 N-m-s/rad
n Relacion de engranajes de M1, M2 y M3 12.5
m Relacion de engranajes en puntos de giro 4
Ra Resistencia de armadura de Mi 3.5 Ω
La Inductancia de armadura de Mi 0.00015 H
Vbi Voltaje contra electromotriz V
Vai Voltaje de armadura V
iai Corriente de armadura A
KA Ganancia del amplificador 8.5
Km Constante del servomotor 0.0421 N-m/A
Kb Constante contra electromotrız 0.0565 V-s/rad
ui Voltajes de control V
g Constante gravitacional 9.81 m/s2

168 Modelado de Sistemas No Lineales
Ecuaciones de Energıa del MRE3
Ecuaciones de Energıa de la Base
La base esta confinada a girar alrededor del eje z (ver Fig. 5.23). Las coordenadasdel CM de la base son:
(x1, y1, z1) = (0, 0,L1
2)
Su energıa cinetica V1 y su energıa potencial U1 vienen dadas por:
V1 =1
2J1q
21 U1 = m1g
L1
2(5.154)
Como la base es un cilindro de masa m1, el momento de inercia alrededor del eje derotacion es:
J1 =1
2m1
(db
2
)2
(5.155)
Ecuaciones de Energıa del Brazo
El brazo esta confinado a girar en el extremo superior de la base z (ver Fig. 5.23).Las coordenadas del CM del brazo son:
(x2, y2, z2) = (−r2senq2cosq1, −r2senq2senq1, L1 − r2cosq2)
Su energıa cinetica V2 y su energıa potencial U2 vienen dadas por:
V2 =1
2J2q
22 +
1
2(x2
2 + y22 + z2
2) =1
2J2q
22 +
1
2r22(q
22 + q2
1sen2q2)
U2 = m2g (L1 − r2cosq2) (5.156)
Como el brazo es un trapezoide de masa m2, base mayor b2, base menor a2, alturaL2 y espesor uniforme c, el momento de inercia alrededor del eje de rotacion resultade la suma:
J2 = Jt2 + m2r22 (5.157)
donde Jt2 es el momento de inercia del brazo girando alrededor de su CM y m2r22 es el
momento de inercia que se debe de agregar, de acuerdo al teorema de ejes paralelos,para que el nuevo eje de rotacion sea el CR. Se sabe que la densidad ρ2 y el volumenVb del brazo se calculan de:
ρ2 =m2
VbVb =
1
2cL2(b2 + a2)
mientras que su area momento de inercia viene dado por [49]:
∫r2dA2 =
L2(b22 + 4b2a2 + a2
2)
36(a2 + b2)
donde r es una distancia generica. Luego, Jt2 toma la expresion:
Jt2 =
∫r2dm =
∫r2ρ2cdA2 = ρ2c
∫r2dA2 =
L32(a
22 + 4a2b2 + b2
2)
18(a2 + b2)2m2

5.9 Manipulador Robotico Esferico de 3GDL (MRE3) 169
Ecuaciones de Energıa del Antebrazo
El antebrazo esta confinada a girar en el centro de rotacion CR del brazo (verFig. 5.23). Las coordenadas del CM del antebrazo, asumiendo que su CM y su CRcoinciden debido a la presencia del efector final en un extremo de antebrazo, son:
(x3, y3, z3) = (c2senq2cosq1, c2senq2senq1, L1 + c2cosq2)
Su energıa cinetica V3 y su energıa potencial U3 se determinan de:
V3 =1
2J3q
23 +
1
2(x2
3 + y23 + z2
3) =1
2J3q
23 +
1
2c22(q
22 + q2
1sen2q2)
U3 = m3g (L1 + c2cosq2) (5.158)
El momento de inercia J3 es la suma del momento de inercia Jt3 del antebrazo masel momento de inercia Je del efector, ambos con respecto al punto de rotacion:
J3 = Je + Jt3
Asumiendo que el efector posee una masa me concentrada, entonces su momento deinercia con respecto al CR es:
Je = (c3 + e)2me
Para formular Jt3 extendemos el resultado encontrado para Jt2. Esto es:
Jt3 =L3
a(a23 + 4a3b3 + b2
3)
18(a3 + b3)2ma
Modelo Dinamico de Lagrange del MRE3
Las ecuaciones de Lagrange que describen la dinamica del manipulador MRE3son:
L = V − U V = V1 + V2 + V3 U = U1 + U2 + U3
T1 =d
dt
∂L
∂q1− ∂L
∂q1T2 =
d
dt
∂L
∂q2− ∂L
∂q2T3 =
d
dt
∂L
∂q3− ∂L
∂q3(5.159)
donde T1, T2 y T3 son los torques generados para hacer rotar la base, el brazo y elantebrazo, respectivamente. Reemplazando L en (5.159) y operando se obtiene:
T1 = J1q1 + (r22 + c2
2)q1sen2q2 + 2(r2
2 + c22)q1q2senq2cosq2
T2 = (J2 + r22 + c2
2)q2 + g(m2r2 − m3c2)senq2
T3 = J3q3 (5.160)
Partiendo de (5.160) podemos determinar el modelo de Lagrange del MRE3. Sinembargo, si estamos interesados en tener como fuerzas de control los voltajes de ar-madura u1, u2 y u3 en lugar de T1, T2 y T3, respectivamente, entonces se requieremodelar los susbsistemas electricos del sistema MRE3, tal como se hizo con el mani-pulador MRE2.

170 Modelado de Sistemas No Lineales
Torques Generados por los Servomotores Mi
La forma general de la expresion del torque generado por los servomotores M1,M2 y M3 es la siguiente:
TLi = −Jeq qLi −(
Beq +n2KmKb
RaqLi
)+
nKmKA
Raui i = 1, 2, 3
Dado que el eje del servomotor M1 de la base esta unido al eje de rotacion de la basemediante una faja de transmision sin perdidas, que posee una relacion de engranajesigual a m > 1, entonces: q1 = mqL1 y T1 = mTL1. Por otro lado, como el eje de M2
esta unido al eje de rotacion del brazo mediante dos engranajes dentados N1 y N2,entonces: q2 = mqL2 y T2 = mTL2, donde m = N2/N1. El mismo analisis es validopara el antebrazo: q3 = mqL3 y T3 = mTL3. Por consiguiente, los torques Ti tomanla forma:
Ti = −Jeq qi −(
Beq +n2KmKb
Raqi
)+
nmKmKA
Raui i = 1, 2, 3 (5.161)
Modelo Dinamico del Manipulador MRE
Igualando uno a uno (5.160) con (5.161), el modelo de Lagrange del sistema MRE3toma la forma:
M(q)q + P(q, q)q + d(q) = u q =
q1
q2
q3
u =
u1
u2
u3
(5.162)
donde:
M =
M11 0 00 M22 00 0 M33
P =
P11 P12 00 P22 00 0 P33
d =
0d21
0
M11 =Ra
nmKmKA
(J1 + Jeq + (r2
2 + c22)sen
2q2
)
M22 =Ra
nmKmKA
(J2 + Jeq + r2
2 + c22
)
M33 =Ra
nmKmKA(J3 + Jeq)
P11 =BeqRa + n2KmKb
nmKmKA
P12 =2Ra(r
22 + c2
2)
nmKmKAq1senq2cosq2
P22 =BeqRa + n2KmKb
nmKmKAP33 = P22
d21 =Ra
nmKmKA(m2r2 − m3c2)senq2 (5.163)

5.10 Pendulo Invertido Rotacional: PIR 171
Ecuacion de Estado No Lineal del Sistema MRE3
Definiendo las siguientes variables de estado: x1 = q1, x2 = q2, x3 = q3, x4 = q1,x5 = q2 y x6 = q3, el modelo dinamico dado en (5.162) se puede transformar en lasiguiente ecuacion de estado del manipulador MRE3:
x1
x2
x3
x4
x5
x6
=
f1(x,u)f2(x,u)f3(x,u)f4(x,u)f5(x,u)f6(x,u)
=
x4
x5
x4
M−111 (−P11x4 − P12x5 + u1)
M−122 (−P22x5 − d21 + u2)
M−133 (−P33x6 + u2)
(5.164)
5.10. Pendulo Invertido Rotacional: PIR
La Fig. 5.24(a) muestra el esquema del sistema PIR (pendulo invertido rota-cional). El diagrama de cuerpo libre para los elementos varilla de masa M1 y elpendulo de masa M2, cuando se fija un angulo θ, se muestran en la Fig. 5.24(b),mientras que en la Fig. 5.24(c), ilustra el diagrama de cuerpo libre con respecto alcentro de masa Lc del sistema PIR de masa Mp = M1 + M2. La distancia Lc sedetermina de:
Lc =M1Lc1 + M2Lc2
M1 + M2=
M1Lc1 + M2Lc2
Mp(5.165)
La ecuacion del movimiento del pendulo se obtiene de la Fig. 5.24(c):
Jpd2α
dt2= Jpα = MpgLcsenα + MpuLccosα (5.166)
donde Jp es el momento de inercia relativo al punto de rotacion del PIR y u es laaceleracion lineal del sistema. La fuerza Mpu y el peso Mpg son las que hacen bajaral PIR.
El momento de inercia Jp se puede calcular suponiendo que el sistema no esta forza-do (u = 0), como sigue. Asumiendo que senα ∼= α y u = 0 en (5.166), esta ecuacionse vuelve lineal:
Jpα = MgLcα
La solucion de esta ecuacion es α = senhωt. Por consiguiente:
Jpω2senhωt = MpgLcsenhωt → Jp =
MpgLc
ω2=
MpgLc
4πf2
donde f es la frecuencia del PIR cuando la varilla esta rıgida y se calcula de:
f =ηcyc
∆t
en la cual ηcyc es el numero de ciclos y ∆t es la duracion de tales ciclos. Otra formade hallar Jp es sumar los momentos de inercia de la varilla J1 y del terminal J2:
Jp = J1 + J2 =1
3M1L
21 + M2
(L1 +
L2
2
)2
=1
3M1L
21 + M2L
21 + M2L1L2 +
1
4M2L
22
(5.167)

172 Modelado de Sistemas No Lineales
M g
M g
L
LL
L
α
2
c1
c2
1
2
α
L c
J α..
Encoder
Base
Motor DCcon encoder
rM u
M gp
p
x x
zz
(a) (b) (c)
1
α
z
x
yh
r
θ
r r sen
r cos
θθ
L sen α
(d)
θ
h
Péndulo
Lp
α
L
L p
x
y(e)
c
c
θ
Fig. 5.24: (a) Sistema PIR. (b) Diagrama de cuerpo libre. (c) Torques en el centro demasa del PIR.
Cuando la posicion θ es variable, entonces el modelo dinamico del PIR se puededeterminar empleando las ecuaciones de Lagrange. Para ello empleamos la vista es-pacial del PIR (Fig. 5.24(d)) y la vista en el plano x–y (Fig. 5.24(e)). De esta ultimavista, considerando que la masa del pendulo esta concentrada en su centro de masa,y a una distancia Lc del punto de rotacion, se obtiene:
x = rcosθ + Lcsenθsenα y = rsenθ − Lccosθsenα z = Lccosα + h
x = −rθsenθ + Lcθcosθsenα + Lcαsenθcosα
y = rθcosθ + Lcθsenθsenα − Lcαcosθcosα z = −Lcαsenα
Las energıas potenciales Us del soporte y Up del pendulo se calculan de:
Us = 0 Up = MpgLccosα + h
Las energıas cineticas Vs del soporte y Vp del pendulo se determinan de:
Vs =1
2Jeq θ
2 Vp =1
2Jpθ
2 +1
2Mp(x
2 + y2 + z2)
donde Jeq es el momento de inercia relativo al eje del motor. La funcion Lagrangianase determina de: ‘
L = V − U = (Vs + Vp) − (Us − Up)

5.11 Problemas 173
L =1
2(Jeq+Mpr
2)θ2+1
2(Jp+MpL
2c)α
2+1
2MpL
2c θ
2sen2α−MprLcθαcosα−MpgLccosα
Las ecuaciones de Lagrange para los grados de libertad θ y α se formulan como:
d
dt
[∂L
∂θ
]− ∂L
∂θ= τoutput =
Kt
RmVm − KtKm
Rmθ
d
dt
[∂L
∂α
]− ∂L
∂α= 0
donde Kt es la constante de torque del motor, Km es la constante de fuerza contra–electromotrız y Rm es la resistencia de armadura del motor. Cabe anotar que seesta despreciando la inductancia de armadura Lm del motor, ası como tambien eltorque de friccion C1θ relativo al eje del motor. Operando convenientemente, el mo-delo de lagrange del sistema PIR resulta:
[Jeq + Mpr
2 + MpL2psen
2α −MprLpcosα
−MprLpcosα Jp + mpL2p
] [θα
]+
[KtKm
Rm+ 1
2MpL2pαsen2α MprLpαsenα + 1
2MpL2pθsen2α
−12MpL
2pθsen2α 0
] [θα
]+
[0
−MpgLpsenα
]=
[KtKm
Rm
0
]Vm (5.168)
Seleccionemos como variables de estado: x1 = θ, x2 = α, x3 = θ y x4 = α, y comosalidas y1 = x1 e y2 = x2. Asumamos que θ y α son pequenas. Entonces: senθ ∼= θ,senα ∼= α, cosθ ∼= 1, cosα ∼= 1, y productos de segundo orden entre las variablesse pueden despreciar. Por lo tanto, las ecuaciones de estado y de salida lineales delsistema PIR dado en (5.168), cuando θ, α son pequenas, resultan:
x = Ax + BVm y = Cx C =
[1 0 0 00 1 0 0
]
A =
0 0 1 00 0 0 1
0M2
pL2crg
den −JpKtKm+MpL2cKtKm
denRmo
0MpLcg(Jeq+Mpr2)
den −MpLcrKtKm
den Rm0
B =
000
Kt(Jp+MpL2c)
den RmMpLcKtrden Rm
(5.169)
den = JeqJp + JeqMpL2p + Mpr
2Jp
5.11. Problemas
Problema 5.1 Motor DC No Lineal
La Fig. 5.25 muestra un motor DC no lineal cuyo modelo dinamico (tomado de [11])se decribe a continuacion. El balance electrico en el devanado del estator se describecomo:
LsdIs
dt+ RsIs = Vs

174 Modelado de Sistemas No Lineales
donde Is es la corriente del estator, Vs es el voltaje del estator, Rs y Ls son la re-sistencia e inductancia del devanado del estator respectivamente. El balance electricoen el devanado del rotor se formula como:
LrdIr
dt+ RrIr = Vr − E
donde Ir es la corriente del rotor, Vr es el voltaje del rotor, Rr y Lr son la resistenciae inductancia del devanado del rotor respectivamente, y E es el voltaje de fuerzacontra electromotriz. Considerando solo friccion viscosa, el balance mecanico en lacarga esta dado por:
JdΩ
dt+ FΩ = T
donde Ω representa la velocidad angular del eje del motor, J denota la inercia de lacarga, F es la constante de friccion viscosa, y T es el torque de carga. Si Φ denota elflujo asociado con el devanado del estator, entonces:
E = KeΦΩ T = KmΦIr Φ = LsIs
donde Ke y Km son constantes. Asumiendo 100 % de eficiencia en la conversion deenergıa, entonces Ke = Km = K. Para el sistema descrito considere que los voltajesu1 = Vs y u2 = Vr son las la entradas del sistema y seleccione como variables deestado: x1 = Is, x2 = Ir, x3 = Ω. Determine el modelo en el espacio de estadodel motor DC descrito. Ahora, asumiendo que el motor va a trabajar a velocidadconstante, determine su modelo de Lagrange.
V
I
IR L
L
R
+
-- +V
Ω
Φ
r
rrs
s
s
Fig. 5.25: Motor DC no lineal.
Problema 5.2 Manipulador Polar Vertical
La Fig. 5.26 muestra un manipulador robotico polar vertical de 2GDL extraıdo de[12]. Demuestre que su modelo de Lagrange es:
[T1
F2
]=
[m1L
21 + m2d
22 0
0 m2
] [θ1
d2
]+
[2d2m2θ1d2
−d2m2θ21
]
donde las fuerzas de control son el torque rotacional T1 y la fuerza traslacional F2,mientras que θ1 y d2 son la posicion angular y el desplazamiento lineal, respectiva-mente. A partir de este modelo determine la ecuacion de estado del manipuladorpolar vertical sabiendo que el vector de estado es: [θ1 d2 θ1 d2]

5.11 Problemas 175
θ
d
T
F
m1
L
m2z
x
θ
d
L
y
z
(a) (b)
Fig. 5.26: Manipulador robotico polar vertical de 2GDL.
Problema 5.3 Manipulador Polar Horizontal
La Fig. 5.27 muestra un manipulador robotico polar horizontal de 2GDL extraıdo de[12]. Demuestre que su modelo de Lagrange es:
[T1
F2
]=
[m1L
21 + m2d
22 0
0 m2
] [θ1
d2
]+
[2d2m2θ1d2 + m1gL1cosθ1 + m2gd2cosθ1
−d2m2θ21 + m2gsenθ1
]
donde las fuerzas de control son el torque rotacional T1 y la fuerza traslacional F2,mientras que θ1 y d2 son la posicion angular y el desplazamiento lineal, respectiva-mente. A partir de este modelo determine la ecuacion de estado del manipuladorpolar vertical sabiendo que el vector de estado es: [θ1 d2 θ1 d2].
d
m1
T
θ
y
F
zm2xL
Fig. 5.27: Manipulador robotico polar horizontal de 2GDL.
Problema 5.4 Manipulador Robotico Traslacional–Esferico (MRTE)
La Fig. 5.28 muestra el Manipulador Robotico Traslacional–Esferico (MRTE). Estemanipulador es una combinacion del manipuladores MRT (Fig. 5.15) descrito en la
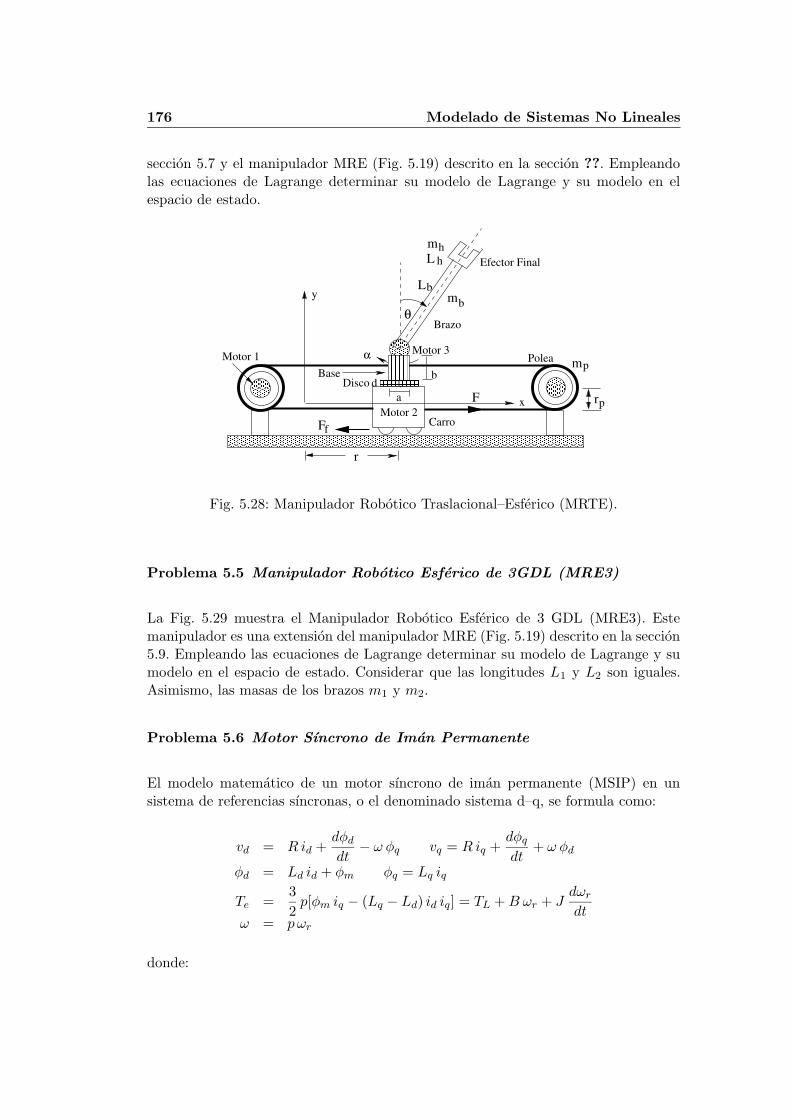
176 Modelado de Sistemas No Lineales
seccion 5.7 y el manipulador MRE (Fig. 5.19) descrito en la seccion ??. Empleandolas ecuaciones de Lagrange determinar su modelo de Lagrange y su modelo en elespacio de estado.
|||||| ~|~~|~~|~|||||||||
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
||||||
Ff
r
x
y
mp
rp
θ
mhL h
mbbL
FdDisco
b
a
Efector Final
Brazo
Carro
BasePoleaMotor 1
Motor 2
α Motor 3
Fig. 5.28: Manipulador Robotico Traslacional–Esferico (MRTE).
Problema 5.5 Manipulador Robotico Esferico de 3GDL (MRE3)
La Fig. 5.29 muestra el Manipulador Robotico Esferico de 3 GDL (MRE3). Estemanipulador es una extension del manipulador MRE (Fig. 5.19) descrito en la seccion5.9. Empleando las ecuaciones de Lagrange determinar su modelo de Lagrange y sumodelo en el espacio de estado. Considerar que las longitudes L1 y L2 son iguales.Asimismo, las masas de los brazos m1 y m2.
Problema 5.6 Motor Sıncrono de Iman Permanente
El modelo matematico de un motor sıncrono de iman permanente (MSIP) en unsistema de referencias sıncronas, o el denominado sistema d–q, se formula como:
vd = R id +dφd
dt− ω φq vq = R iq +
dφq
dt+ ω φd
φd = Ld id + φm φq = Lq iq
Te =3
2p[φm iq − (Lq − Ld) id iq] = TL + B ωr + J
dωr
dtω = p ωr
donde:

5.11 Problemas 177
x
y
z
b
a
q2
d rda
mdM1
SERVOMOTORM2
q1
mb
DISCO
BASE
M3
L
L2
Lhm1
1
m2
hm
q3
EFECTORFINAL
Fig. 5.29: Manipulador Robotico Esferico de 3GDL (MRE3).
vd, vq Voltajes en los ejes d y q del estator.id, iq Corrientes en los ejes d y q del estator.φd, φq Flujos magneticos en los ejes d y q del estator.φm Flujo creado por los magnetos del rotor.R Resistencia del estator.Ld, Lq Inductancias en los ejes d y q del estator.Te, TL Torques electromagnetico y de carga.J Momento de inercia.B Coeficiente de friccion viscosa.p Numero de pares de polos.ωr Velocidad del rotor en frecuencia angular.ω Frecuencia del inversor.
Determinar el modelo de Lagrange y la ecuacion de estado del MSIP. Los estadosdel sistema son id, iq y wr. Las entradas son vd y vq y la salida es el toque Te.
Problema 5.7 Pendubot
La Fig. 5.30 muestra el sistema Pendubot. Demostrar que el modelo de Lagrange delsistema es:
T = D(q)q) + C(q, q)q + g(q)
donde T = [τ 0]T contiene al torque τ generado por el motor DC, y:
D =
[d11 d12
d21 d22
]C =
[hq2 hq2 + hq1
−hq1 0
]g =
[φ1
φ2
]

178 Modelado de Sistemas No Lineales
d11 = m1L2c1 + m2(L
21 + L2
c2 + 2L1Lc2cosq2) + J1 + J2
d11 = = d21 = m2(L2c2 + L1Lc2cosq2) + J2
d22 = m2L2c2 + J2
h = −m2L1Lc2senq2
φ1 = (m2Lc1 + m2L1)gcosq1 − m2Lc2gcos(q1 + q2)
φ2 = m2Lc2cos(q1 + q2)
En las ecuaciones anteriores, m1 y m2 son las masas de los brazos 1 y 2 respecti-vamente, Lc1 y Lc2 son las distancias a los centros de masa de de los brazos 1 y 2respectivamente, J1 y J2 son los momentos de inercia de los bazos 1 y 2 con respectoa su centro de masa respectivamente, y g es la aceleracion de la gravedad.
Brazo 2
Encoder 2
Encoder 1
Brazo 1
Motor DC
Mesa soporte
y
x
q
q
1
2L
c2
L2
LLc1
τ
Fig. 5.30: Sistema pendubot.

Apendice A
Fundamentos de MATLAB ySimulink
MATLAB es un lenguaje tecnico de computo de alto nivel e interactivo que puede serempleado para el desarrollo de algoritmos, visualizacion y analisis de datos y computacionnumerica. MATLAB se emplea mundialmente en diversas aplicaciones que incluyen proce-samiento de senales e imagenes, telecomunicaciones, diseno de sistemas de control, prue-bas y mediciones, modelado y analisis financiero y biologıa computacional. MATLABtambien cuenta con una coleccion herramientas (Toolboxes) para propositos especıficos,disponibles por separado, los cuales permiten resolver ciertas clases de problemas en elarea de su aplicacion.
Simulink emplea un lenguaje en bloques y se usa para modelar, simular y analizarsistemas dinamicos continuos, discretos o hıbridos (combinacion de ambas). El modelodel sistema puede ser lineal o no lineal y puede tener diferentes partes que se discreticeno se actualicen a diferentes tiempos de muestreo. Esta herramienta permite validar losmodelos dinamicos existentes o aquellos construidos desde cero.
En este Apendice, una seccion esta dedicada a MATLAB y la otra a Simulink.Todos los archivos de esta publicacion se pueden descargar de link DESCARGAS dewww.ctlima.com.
A.1. Fundamentos de MATLAB
A.1.1. El Entorno de Trabajo de MATLAB
Luego de instalar el programa MATLAB, aparece un icono caracterıstico del mis-mo en el escritorio. Para iniciar MATLAB hacer doble click en tal ıcono para haceraparecer la Fig. A.1. La interaccion de MATLAB con el usuario es a traves de ven-tanas. Las principales son (ver Fig. A.1):
Ventana de comandos (Command Window).- Aquı se ejecutan las instrucciones.
Historial de comandos (Command History).- Ventana que muestra el historialde las instrucciones introducidas a traves de la ventana de comandos.
Directorio actual (Current Directory).- Ventana que muestra los directorios yarchivos actuales.

180 Fundamentos de MATLAB y Simulink
Espacio de trabajo (Workspace).- Ventana donde aparecen las variables alma-cenadas en memoria.
Ventana de figuras.- Las figuras aparecen cuando el usuario las realiza.
Para cerrar el programa, seleccionar en el menu: File − > Exit MATLAB o tipearquit en la ventana de comandos.
Para obtener informacion detallada de cualquier topico relacionado con MAT-LAB, hacer click en el icono sımbolo de interrogacion ?, ubicado debajo de la lineadel menu de la Fig. A.1, para que aparezca la ventana Help. En el espacio Search forde tal ventana, tipear el topico del que desea informacion. Por ejemplo, si tipea savey hace click en Go, entonces la informacion detallada y ejemplos sobre este comandoapareceran en la parte derecha de la ventana Help.
Fig. A.1: El entorno de trabajo de MATLAB.
A.1.2. Comandos y Funciones Generales
Tener en cuenta que MATLAB NO HACE la distincion entre mayusculas yminusculas en sus comandos. Se sugiere usar siempre letras minusculas para los co-mandos. El sımbolo >> que aparece en la ventana de comandos es el prompt de

A.1 Fundamentos de MATLAB 181
MATLAB. Los comandos escritos despues del prompt requieren de un ENTER paraque MATLAB los procese. El formato siguiente: >> help roots ENTER , es utilcuando se desea tener informacion de un determinado comando. En este caso partic-ular, luego de presionar la tecla ENTER, la VC (Ventana de Comandos) muestra laayuda correspondiente al comando roots. En lo que sigue, la introduccion de la teclaENTER sera sobreentendida.
El comando format long le dice a MATLAB que se quiere trabajar con 15 dıgitospara doble precision y 5 dıgitos para simple precision. Por ejemplo, escribiendo enla VC: >> format long, 1/3, MATLAB devuelve 0.33333333333333, mientrasque >> format, 1/3 devuelve 0.3333.
Las operaciones fundamentales en MATLAB son suma a+b, resta a-b, multipli-cacion a*b, division derecha a/b, division izquierda a\b y exponenciacion a^b. Ladivision izquierda se emplea mas con matrices. El resultado de la operacion a/b esigual al resultado de b\a.
El orden de precedencia en las operaciones fundamentales es: ejecutar primeroel parentesis mas interno, luego los exponentes, despues la multiplicacion o division(ambos tienen igual presedencia), y finalmente la suma y resta. Ejemplo:
>> 0.7854-(0.7854)^3/(1*2*3)+0.785^5/(1*2*3*4*5)...
-(0.785)^7/(1*2*3*4*5*6*7)
ans =
0.7071
Observar que los tres puntos al final de la primera fila indica que la sentencia continuaen la siguiente lınea.
MATLAB reconoce a las letras i y j como numeros imaginarios. Es decir: i =√−1 y j =
√−1. Por ejemplo, >> 4i - 2j devuelve 0 + 2.0000i, mientras que
>> 8i-j4 devuelve Undefined function or variable ’j4’.Sabemos que la division sobre cero es infinito, mientras que la division 0/0 es
indeterminada. En notacion MATLAB >> 20/0 devuelve Inf , mientras que>> 0/0 devuelve NaN, donde NaN esta por Not a Number.
A continuacion se describen otros comandos de utilidad general. Se recomiendaleer el help del comando antes de usarlo.
help help Lista topicos de ayuda.what Lista archivos con extension m, MAT y MEX.type Lista archivos tipo m.lookfor Busca archivos m desde el teclado.which Localiza funciones y archivos.demo Ejecuta un demo de MatLab.helpwin Ayuda en linea. Se muestra en la ventana de ayuda.who Lista las variables actuales.whos Lista las variables actuales en forma extendida.load Carga variables del disco al espacio de trabajo.save Salvar variables del espacio de trabajo al disco.clear Limpia variables y funciones de la memoria.clc Despeja (limpia) la ventana de comandos.

182 Fundamentos de MATLAB y Simulink
pwd Muestra el directorio de trabajo actual.size Muestra el tamano de una matriz.length Numero de elementos de un vector.disp Muestra los valores de una matriz o texto.exist Chequea si estan definidas las variables o funciones.finite(x) Devuelve 1 si x es finito y cero en otro caso.isinf(x) Devuelve 1 si x es ∞ o −∞, y cero en otro caso.isnan(x) Devuelve 1 si x es indeterminado y cero en otro caso.computer Devuelve el tipo de computadora.version Devuelve la version actual de MATLAB.why Devuelve respuestas breves a casi cualquier interrogante.lasterr Devuelve el ultimo mensaje de error.diary Guarda el texto de la sesion de trabajo actual.unix Ejecuta comandos del sistema operativo Unix.ver Informa sobre la version de MATLAB, Simulink y Toolboxes.info Da informacion acerca de la empresa Mathworks.whatsnew Informa acerca de lo nuevo de MATLAB.hostid Identifica el numero del servidor host.date Proporciona la fecha.clock Proporciona el vector: [ano, mes, dıa, hora, minuto, segundo].calendar Proporciona el mes en curso.fix(clock) Proporciona lo mismo que clock.cd Cambiar el directorio actual de trabajo.dir Muestra el directorio actual.delete Borra un archivo u objeto grafico.
Por ejemplo, ingresando:
>> clear, a = magic(3); b = ones(1, 3)*-5.7; c = [8 6 4];
>> save -ascii mydata.dat
>> clear, load mydata.dat, mydata
mydata =
8.0000 1.0000 6.0000
3.0000 5.0000 7.0000
4.0000 9.0000 2.0000
-5.7000 -5.7000 -5.7000
8.0000 6.0000 4.0000
donde las 3 primeras filas corresponden a la matriz formada por el comando a=magic(3),la fila 5 se origina por el comando b = ones(1, 3)*-5.7 y la ultima fila correspondeal vector c=[8 6 4 2].
A.1.3. Creacion de Archivos Tipo m
La forma mas conveniente de procesar informacion en MATLAB es mediante losarchivos m. Un archivo m se genera como sigue:
Crear un directorio de trabajo, en donde deben de estar todos sus archivos dede trabajo, tales como archivos m, archivos de datos, etc.
A.1 Fundamentos de MATLAB 183
Ubicarse en tal directorio de trabajo creado empleando el browser de MATLAB(el icono cuadrado con tres puntos ubicado en el extremo superior derecho dela Fig. A.1.
Hacer click en el icono hoja de papel en blanco ubicado en el extremo superiorizquierdo de la Fig. A.1, para abrir el editor de MATLAB.
Escribir el contenido usando lenguaje MATLAB y guardarlo con un nombrearbitrario. El programa genera automaticamente la extension m del archivo.
Hay tres formas de ejecutar el archivo m generado: (1) presionando la tecla F5;(2) haciendo click en Debug → Run en el menu del editor; (3) haciendo clicken el icono Run and Save del editor, el cual se ubica debajo de la linea quecontiene el menu del editor.
Si el programa posee errores, estos seran mostrados en la ventana de comandos.Corregir tales errores y ejecutar el programa. Esta operacion puede repetirsepocas o varias veces dependiendo de la magnitud del programa y experienciadel programador.
La ejecucion de un archivo m se puede parar en cualquier momento presionandosimultaneamente las teclas Ctrl + C.
El siguiente archivo de nombre miarchivom.m contiene informacion adicional rel-evante.
% miarchivom.m GENERACION DE UN ARCHIVO m.
% MATLAB NO PROCESA LO QUE ESTA A LA DERECHA DEL SIMBOLO PORCENTAJE: %
clear all; close all; clc;
% clear: LIMPIA VARIABLES Y FUNCIONES DE LA MEMORIA.
% close: CIERRA FIGURAS.
% clc: LIMPIA LA VENTANA DE COMANDOS (VC) DE MATLAB
% TAMBIEN ES VALIDO ESCRIBIR: clear all, close all, clc
a=7; b=-4; % DATOS
% EL ; IMPIDE QUE LA VC MUESTRE a Y b LUEGO DE EJECUTAR miarchivom.m
r=a-b; m = a*b; d = a/b; e = a^b; % OPERACIONES ARITMETICAS BASICAS
s=a+b % LA VC DEVUELVE s=3 LUEGO DE EJECUTAR miarchivom.m
En lo que sigue, solo emplearemos archivos m para explicar mediante numerososejemplos las bondades del lenguaje MATLAB. En tales ejemplos emplearemos tantolos comandos listados en la subseccion A.1.2 ası como otros mas especializados.
A.1.4. Matematicas
Funciones Matematicas Comunes
% funcionesmat.m FUNCIONES MATEMATICAS COMUNES
clear all; close all; clc;
% APROXIMACIONES
x1=5.92;

184 Fundamentos de MATLAB y Simulink
r1=ceil(x1); % r1=6 (ceil REDONDEA HACIA INFINITO)
r2=fix (x1); % r2=5 (fix REDONDEA HACIA CERO)
r3=floor (x1); % r3=5 (floor REDONDEA HACIA MENOS INFINITO)
r4=round([19.54646 13.656 -2.1565 0.78]);
% r4=[20 14 -2 1] (round REDONDEA HACIA EL ENTERO MAS PROXIMO)
% TRIGONOMETRIA
r5=sin(pi/2); % r5=1 (ANGULO EN RADIANES)
r6=sind(-90); % r6=-1 (ANGULO EN GRADOS)
r7=cosd(60); % r7=0.5 (ANGULO EN GRADOS)
r8=asind(1); % r8=90 (ANGULO EN GRADOS)
% ALGUNAS OPERACIONES
r9=abs (-7); % VALOR ABSOLUTO, r9=7
r10=sign(10); % SIGNO, r10=10/abs(10)=10/10=1
r11=gcd (9,12); % MAXIMO COMUN DIVISOR ENTRE 9 Y 12, r11=3
r12=lcm (10,25); % MINIMO COMUN MULTIPLO ENTRE 10 Y 25, r12=50
r13=mod (-12,5); % MODULO, SI y~=0, n=floor(x./y)=-3, r13=x-n.*y=3
r14=rem (12,5); % RESTO DE LA DIVISION ENTRE 12 Y 5, r14=2
r15=nthroot (8,3); % RAIZ CUBICA DE 8, r15=2
% CON NUMEROS COMPLEJOS
x=3+4i;
r16=sign(x); % r16=x/abs(x)=(3+4i)/5=0.6+0.8i
Vectores y Matrices
% vectoresymatrices.m VECTORES Y MATRICES
clear all; close all; clc;
% COMO DEFINIRLOS
x = [5 7 -2 4 -6]; % VECTOR FILA, ELEMENTOS SEPARADOS POR ESPACIOS
y = [2,1,3,7]; % VECTOR FILA, ELEMENTOS SEPARADOS POR COMAS
z = [0 1 2,3 4,5]; % VECTOR FILA, ELEMENTOS SEPARADOS POR COMAS Y ESPACIOS
w = [2;1;3;7]; % VECTOR COLUMNA
B = [1 2 3;4 5 6]; % MATRIZ DE 2 FILAS Y TRES COLUMNAS AL IGUAL QUE A
A = [1 2 3 % A(1)=1, A(3)=2, A(5)=3
4 5 6]; % A(2)=4, A(4)=3, A(6)=6
% DIRECCIONAMIENTO
r1=x(2); % r1=7
r2=x(end); % r2=-6
r3=x(2:4); % r3=[7 -2 4]
r4=x(1:3:5); % r4=[5, -2 y -6]
r5=x([3 5 1]); % r5=^[-2, -6, 1]
r6=A(2,1); % r6=4
r7=A(2,:); % r7=[4 5 6]
r8=A(2,2:3); % r8=[5 6] (2da FILA, COLUMNAS DE 2 A LA 3)
r9=A(2,[3 1]); % r9=[6 4
r10=A([2 1],2:3); % r10=[5 6] (FILAS 2 y 1, COLUMNAS DE 2 A LA 3)
% [2 3]
r11=A(end,[1 3]); % r11=[4 6]
A.1 Fundamentos de MATLAB 185
% CONSTRUCCION ABREVIADA DE ALGUNOS VECTORES
r12=(1:7); % r12=[1 2 3 4 5 6 7]
r13=[1:7]; % r13=[1 2 3 4 5 6 7]
r14=(1:3:10); % r14=[1 4 7 10] (entre 1 y 10 con incremento 3)
r15=(1:4:10); % r15=[1 5 9] (entre 1 y 10 con incremento 4)
r16=(50:-7:1); % r16=[50 43 36 29 22 15 8 1]
r17=linspace(2,6,3); % r17=[2 4 6] (vector lineal entre 2 y 6, 3 elem.)
r18=linspace(2,6,4); % r17=[2.0000 3.3333 4.6667 6.0000]
r19=linspace(2,6); % devuelve vector lineal entre 2 y 6 con 100 elem.
r20=logspace(0,2,4); % r20=[1.0000 4.6416 21.5443 100], vector
% logarıtmicamente espaciado entre % 10^0 y 10^2 con 4 elem. equidistantes
r21=logspace (0,2); % devuelve vector log. entre 10^0 y 10^2 con 50 elem.
% CONSTRUCCION DE ALGUNAS MATRICES
r22=zeros(3); % matriz cuadrada de 3 x 3 llena de ceros
r23=zeros(2,5); % matriz 2 x 5 de ceros
r24=ones(2,3); % matriz 2 x 3 de unos
r25=rand(2,4); % matriz 2 x 4 de numeros aleatorios entre 0 y 1 con
% distribucion uniforme
r26=randn (2,5); % matriz 2 x 5 de numeros aleatorios con distribucion
% normal, con media 0 y desviacion unitaria: normal(0,1)
r27=eye(2); % matriz identidad 2 X 2
r28=eye(4,2); % matriz 4 X 2 de unos en la diagonal y ceros en el resto
r29=magic(3); % matriz magica 3 x 3, contiene numeros 1 al 3^2, y
% suma elem. filas = suma elem. columnas = suma elem. diagonal:
% 8 1 6
% 3 5 7
% 4 9 2
r30=hilb(3); % matriz de Hilbert 3 x 3
r40=invhilb(3); % inversa de la matriz de Hilbert 3 x 3
% OPERACIONES BASICAS CON MATRICES
P=[1 2;3 4]; Q=[1 1;0 1]; R=[1+i 2+2i;3+i 4+7i];
r41=P*Q; % r41=[1 3;3 7]
r42=P.*Q; % r42=[1 2;0 4] (multiplicacion elemento a elemento)
r43=R’; % conjugada(traspuesta(R)) o traspuesta(conjugada(R))
r44=R.’; % traspuesta de R
r45=P+2; % suma 2 a cada elemento de A
% FUNCIONES PARA OPERAR CON VECTORES
% Sean los vectores: x = [x1 x2 x3]; y = [y1 y2 y3];
% Producto vectorial:
% cross(x,y)=[(x2*y3-y2*x3) -(x1*y3-y1*x3) (x1*y2-y1*x2)]
x1 = [1 2 3]; y1 = [4 5 6]; xcy=cross(x1,y1); % xcy=[-3 6 -3]
% Producto escalar: dot(x,y)=x1*y4+x2*y5+x3*y6
xdy=dot(x1,y1); % xdy=32
% FUNCIONES PARA EL ANALISIS DE MATRICES
v = [1 2 3];
% >> diag (v) % crea matriz diagonal con elementos 1, 2 y 3 en la diagonal
M = [1 2 3 4; 7 8 9 2; 2 4 6 8];

186 Fundamentos de MATLAB y Simulink
r46=diag(M); % r46=[1;8;6] (vector columna a partir de la diagonal
% de una submatriz de M
r47=size(M); % r47=[3 4] (devuelve dimensiones de M: 3 filas, 4 colum.)
r48=length(M); % devuelve la mayor de las dos dimensiones de la matriz M
r49=rank(M); % r49=2 (2 vectores filas/colum linealmente independientes)
r50=rref(M); % reduccion mediante Gauss
% r50 =
% 1 0 -1 -4.6667
% 0 1 2 4.3333
% 0 0 0 0 % rank(M)=2 porque hay dos filas no nulas
r51=tril(M); % crea matriz triangular superior
r52=triu(M); % crea matriz triangular inferior
% OTRAS OPERACIONES CON MATRICES
A1=[1 0 0 2
3 4 5 0
2 4 0 0];
r52=find(A1); % DEVUELVE [1;2;3,5;6;8;10] (INDICES EN UN VECTOR COLUMNA)
r54=reshape(A1,2,6); % r54: matriz 2 X 6 a partir de las columnas de A1
% r54=
% 1 2 4 0 0 0
% 3 0 4 5 2 0
r55=rot90(A1); % A1 gira 90o, r55 toma la forma:
% 2 0 0
% 0 5 0
% 0 4 4
% 1 3 2
r56=rot90(A1,3); % A1 gira 270o ( 90o x 3 = 270o )
% Formemos la matriz A2:
A2=[A1
2 4 6 3];
r57=funm(A2,@sin); % calcula seno de cada elemento de A2
r58=expm(A2); % calcula matriz exponencial de A2
% DIVISION C/D RESUELVE EL SISTEMA Cx=D Y ES EQUIVALENTE A inv(C)*D.
% DIVISION C\D RESUELVE EL SISTEMA xD=C Y ES EQUIVALENTE A C*inv(D).
% TEXTO
a = ’casa’; b = ’gato’; AA = ’CASA’; % cadenas de caracteres (vectores)
r60=a + b; % r60=[202 194 231 208] (suma ASCII elemento por elemento)
r61=a + 0; % r61=[99 97 115 97] (representacion ASCII de a)
r62=abs(a); % r62=[99 97 115 97] (representacion ASCII de a)
r63=double(a); % r63=[99 97 115 97] (representacion ASCII de a)
r64=setstr([99 97 115 97]); % r64=casa
r65=abs(’a’)-abs(’A’); % r65=32 (resta entre minusculas y mayusculas)
r66=setstr (a-32); % r66=CASA (ya conocemos la diferencia)
d=5; disp(d); % devuelve 5 en la VC
disp(’escribe esto’); % devuelve el texto << escribe esto >> en la VC

A.1 Fundamentos de MATLAB 187
Polinomios
% polinomios.m POLINOMIOS
clear all; close all; clc;
% NOTACION: 5x^4 - 9x^3 + 13x^2 + 9x - 14 ==> [1 -9 13 9 -14]
x = [1 -9 13 9 -14]; rx=roots(x); % rx contiene raıces de x
xx = poly(rx); % devuelve xx generado por raıces de rx (xx=x)
p = [1 2 7]; q = [1 3 6];
c = conv(p,q); % c=(z^2+2z+7)(z^2+3z+6)=z^4+5z^3+19z^2+33z+42
% =[1 5 19 33 42]
d = deconv(c,q); % cociente de dividir polinomio c entre q
dp = polyder(p); % derivada del polinomio p
dpq = polyder(p,q); % derivada del producto de los polinomios p y q
ep=polyval(p,[0 1 5]); % evalua p=x^2+2x+7 para x=0, x=1 y x=5
em=polyval(p,[0 1 2;-1 -2 -3;4 0 7]); % evalua p para cada fila
% em=
% 7 10 15
% 6 7 10
% 31 7 70
Operaciones Relacionales y Logicas
% operaclogicas.m OPERACIONES RELACIONALES Y LOGICAS
clear all; close all; clc;
% OPERADORES RELACIONALES: < <= > >= == ~=
% OPERADORES LOGICOS: & (AND) | (OR) ~ (NOT)
% ORDEN DE PRECEDENCIA: ~= == <= >= < >
a = 1:9; b = 5-a; % a=[1 2 3 4 5 6 7 8 9], b=[4 3 2 1 0 -1 -2 -3 -4]
r1 = a<6; % r1(i)=1 si a(i)<6 es verdadero y r1(i)=0 si es falso
r2 = a==b; % r2(i)=1 si a(i)==b(i) es verdadero y r2(i)=0 si es falso
r3 = a~=b; % r3(i)=1 si a(i)~=b(i) es verdadero y r3(i)=0 si es falso
r4 = (a>b)&(b>-3); % r4(i)=1 si (a(i)>b(i))&(b(i)>-3) y 0 si es falso
c = [Inf 0 5 -8 NaN 94];
% >> exist(’c’) % devuelve 1 porque existe una variable llamada c
% >> isnan(c) % devuelve 1 si c(i) es NaN y 0 si no es NaN
% >> isinf(c) % devuelve 1 si c(i) es Inf y 0 si no es Inf
% >> isfinite(c) % devuelve 1 si c(i) es finito y 0 si no es finito
Creacion de Funciones
La forma general de una funcion de dos variables es: function[a,b]=nombre_funcion(x,y) .Por ejemplo, se desea crear la funcion de nombre calculos para calcular la sumay la resta de dos numeros, vectores o matrices (x,y). Los resultados los devuelve en[a,b]. Los listados del archivo calculos.m y el archivo usacalculo.m para usar calcu-los.m se muestran a continuacion. Solo es necesario ejecutar el archivo usacalculos.mpara obtener los resultados.
% calculos.m FUNCION calculos
clear all; close all; clc;

188 Fundamentos de MATLAB y Simulink
function[suma,resta] = calculos(x,y)
suma = x + y;
resta = x - y;
% usacalculos.m USA FUNCION CONTENIDA EN calculos.m
clear all; close all; clc;
x = [1 5; 3 -2; 3 7; 4 -1; 0 2]; y = [16 -1; 0 4; 1 5; -1 0; -1 3];
[a,b] = calculos(x,y); a, b
% LA VENTANA DE COMANDO VC DEVUELVE a = x+y, b = x-y
Programacion
% programacion.m PROGRAMACION EN MATLAB
clear all; close all; clc;
% SENTENCIA FOR
for x = 1:5
disp(’x toma el valor’) % DEVUELVE x toma el valor PARA CADA x
disp(x) % DEVUELVE EL VALOR DE x
end
% SENTENCIA WHILE
a=3;
while a < 5
disp(’a es menor que 5 porque su valor es:’)
disp(a)
a = a + 1;
end
% SENTENCIA IF
b = 5;
if b == 0 % SE USA == PORQUE ES UNA EXPRESION LOGICA
disp (’el valor de b es 0’)
elseif b == 1
disp (’el valor de b es 1’)
elseif b == 2
disp (’el valor de b es 2’)
elseif b == 3
disp (’el valor de b es 3’)
else
disp (’b no es ni 0 ni 1 ni 2 ni 3’)
end
% GENERACION DE NUMEROS PRIMOS MENORES DE 100
disp(’Estos son los numeros primos menores de 100’)
disp(2)
for i=2:100
n=2;
while n <= sqrt(i)
if rem(i,n)==0
n=i;
else n=n+1;
A.1 Fundamentos de MATLAB 189
end
end
if n~=i disp(i)
end
end
Analisis Numerico y de Datos
% analisisnumerico.m ANALISIS NUMERICO
clear all; close all; clc;
ds=diff(’sin(7*x) ’); % devuelve derivada respecto a x
dp=diff (’(exp(x)* cos(3*x*y))’,’y’); % devuelve derivada parcial en y
dd=diff (’(sin (x^2))’,2); % devuelve segunda derivada respecto a x
ec=feval(’cos’,pi); % evalua el coseno en pi
ep=feval(’cos’, [0 pi/3 pi] ); % evalua el coseno en varios puntos
em=feval(@cos,[0 pi/3 pi] ); % igual que la evaluacion anterior
fm=fminbnd(@sind,0,360); % valor entre 0 y 360 donde sind toma el mınimo
fz=fzero(’sind’,100); % encuentra valor mas proximo a 100 donde sind=0
fq=quad(’sin’,0,pi); % integral del seno de 0 a pi, aprox. rectangular
% analisisdatos.m ANALISIS DE DATOS
clear all; close all; clc;
X = [5 7 9 2 9; 3 1 7 5 1; 3 9 2 7 5; 1 5 5 1 8];
% >> cumprod(X) % devuelve matriz de productos acumulados
% >> cumsum(X) % devuelve matriz de sumas acumuladas
% >> mean(X) % devuelve media de cada columna
% >> sort(X) % ordena los valores de cada columna
% >> sum(X) % devuelve suma de todos los elementos de cada columna
% >> var(X) % devuelve varianza de los elementos de cada columna
% >> max (X) % devuelve valor maximo de cada columna
% >> min (X) % devuelve valor mınimo de cada columna
% >> iqr (X) % devuelve rango intercuartılico de cada columna
% >> range(X) % devuelve rango de cada columna (diferencia entre el
% maximo y el mınimo)
Y = [5 7 9 2 9 3 1 7 5 1 3 9 2 7 5 1 5 5 1 8];
% >> tabulate(Y) % devuelve tabla de frecuencia de ocurrencia de c/numero
% Value Count Percent
% 1 4 20.00% (EL NUMERO 1 APARECE 4 VECES)
% 2 2 10.00% (EL NUMERO 2 APARECE 2 VECES)
% 3 2 10.00%
% 4 0 0.00%
% 5 5 25.00%
% 6 0 0.00%
% 7 3 15.00%
% 8 1 5.00%
% 9 3 15.00%

190 Fundamentos de MATLAB y Simulink
A.1.5. Graficos
% graficas2D.m GRAFICAS EN 2 DIMENSIONES
clear all; close all; clc;
figure(1) % CREA figure(1)
x=[-2 -1 0 1 2 3]; y=[4 1 0 1 4 9]; z=[6 5 3 7 5 2];
w=[-2 -1 0 0.5 1.5 2.5];
plot(x,y,’*’,x,z,’-’), xlabel(’eje x’), ylabel(’eje y’), title(’x vs y’)
grid, text(1,4,’HOLA>&$’), axis([-3 3 -1 10]), gtext(’AQUI COLOCO TEXTO’)
figure(2)
x1 = pi*(-1:0.01:1); y1=x1.*sind(x1); y2=cosd(x1); y3=sin(x1).*exp(x1);
y4=exp(-x1);
subplot(2,2,1), plot(X1,Y1), title (’x1*seno(x1)*’)
subplot(2,2,2), plot(x1,y2), title (’cos(x1)’)
subplot(2,2,3), plot(x1,y3), title (’sen(x1)*exp(x1)’)
subplot(2,2,4), plot(x1,y4), title (’-exp(x1)’)
figure(3)
plot(x1,y1), title (’x1*seno(x1)*’),
hold on
plot (x1,y2), title (’cos(x1)’), plot (x1,y3), title (’sen(x1)*exp(x1)’)
hold off
figure(4)
subplot(221), fplot(’sind(x)’,[0 180]), title (’sen(x) de 0 a 360 grados’)
subplot(222), fplot(’x^2*sin(1/x)’,[-0.05 0.05]), title (’x^2 * sin(1/x)’)
subplot(223), ezplot(’exp(x)’) % easy plot de exp(x)
subplot(224), ezplot(’sin(t)’,’cos(t)’,[0 pi])
figure(5)
subplot(2,1,1), ezplot(’x^2 - y^2 - 1’)
x3=[-2 0 2 0 -2]; y3=[4 8 4 0 4];
subplot(2,1,2), plot(x3,y3), fill(x3,y3,’r’) % r=red
% graficas3D.m GRAFICAS EN 3 DIMENSIONES
clear all; close all; clc;
figure(6)
x3=[-2 0 2 0 -2]; y3=[4 8 4 0 4]; z3=[3 5 10 5 3];
subplot(311), fill3(x3,y3,z3,’b’) % plot en 3D, b=blue
subplot(312), ezsurf(’sin(x*y)’,[-2 2 -2 2])
subplot(313), x4=-720:720; y4=sind(x4); z4=cosd(x4); plot3(x4,y4,z4)
figure(7)
x = -10:0.5:10; y = -10:0.5:10;
subplot(3,1,1), [X,Y] = meshgrid (x,y); % crea matrices para la malla
Z = sin(sqrt(X .^2 + Y .^2))./ sqrt (X .^ 2 + Y .^ 2 + 0.1);
mesh (X,Y,Z) % dibuja la grafica
subplot(3,1,2), [X,Y] = meshgrid (-10:0.5:10);
Z = sin(sqrt(X .^2 + Y .^ 2))./sqrt(X .^ 2 + Y .^ 2 + 0.1); mesh (X,Y,Z)
subplot(3,1,3), surf (X,Y,Z)
figure(8)
x = -10:0.5:10; y = -10:0.5:10;

A.1 Fundamentos de MATLAB 191
[X,Y] = meshgrid(x,y); % crea matrices para hacer la malla
Z = sin(sqrt(X .^2 + Y .^2))./ sqrt (X .^ 2 + Y .^ 2 + 0.1);
subplot(2,2,1), contour (X,Y,Z) % dibuja las lıneas de contorno
subplot(2,2,2), pcolor (X,Y,Z) % transforma altura a conjunto de colores
subplot(2,2,3), surf (X,Y,Z), view(10,70) % vista: azimut 10, elevacion 70
subplot(2,2,4), surf (X,Y,Z), view(10,-12.2), colorbar
% colorbar a~nade barra de color
% >> surf (X,Y,Z), [az,el] = view % devuelve azimut = -37.5000, elevac = 30
figure(11)
x = -10:0.5:10; y = -10:0.5:10;
[X,Y] = meshgrid(x,y); % crea matrices para hacer la malla
Z = sin(sqrt(X .^2 + Y .^2))./ sqrt (X .^ 2 + Y .^ 2 + 0.1);
subplot(2,1,1),
[C,h] = contour (X,Y,Z); clabel (C,h) % a~nade alturas a los contornos
subplot(2,1,2),
M = [0 0 0; 1 0 0; 0 1 0; 0 0 1; 1 1 0];
% matriz de colores negro, rojo, verde, azul, amarillo
colormap(M), surf (X,Y,Z)
figure(12)
t=0:0.001:0.009;
v=900:1025;
[T V]=meshgrid(t,v);
aux1=16*pi^2*(T.^2).*((V-918).^2).*((V-1011).^2);
aux2=aux1+(2*V-1929).^2;
w=T./aux2;
z=35000000*w;
surfl(t,v,z); % supericie sombreada 3-D con rayos
shading interp; % fija modo shading (sombra) con interpolacion
colormap(pink); % fija a pink (rosado) el color de la figura
rotate3d; % gira la figura mediante el raton
print -f -depsc ultimo % GENERA ultimo.eps EN COLOR
A.1.6. Matematica Simbolica
% simbolica.m MATEMATICA SIMBOLICA
clear all; close all; clc
% DERIVADAS E INTEGRALES
syms x n a b t theta y u;
f1 = x^n; r1=diff(f1); % r1=x^n*n/x=n*x^(n - 1), DERIVADA EN x
f2 = sin(a*t + b); r2=diff(f2); % r2=a*cos(b + a*t), DERIVADA EN t
f3 = exp(i*theta); r3=diff(f3); % r3=exp(theta*i)*i, DERIVADA EN theta
r4 = int(f1); % r4=x^(n+1)/(n+1), INTEGRAL INDEFINIDA EN x
f5 = y^(-1); r5=int(f5); % r5=1/y, INTEGRAL INDEFINIDA EN y
f6 = n^x; r6=int(f6); % r6=n^x/log(n), INTEGRAL INDEFINIDA EN n
r7=int(f2); % r7=-cos(b + a*theta)/a, INTEGRAL EN theta
f8 = 1/(1+u^2); r8=int(f8); % r8=atan(u), INTEGRAL INDEFINIDA EN n
f9 = exp(-x^2); r9=int(f9); % r9=(pi^(1/2)*erf(x))/2, erf=funcion error

192 Fundamentos de MATLAB y Simulink
c=0; d=1; f10 = x^7; r10=int(f10, c, d); % r10=1/8, INTEGRAL DEFINIDA
c=1; d=2; f11 = 1/x; r11=int(f11, c, d); % r11=log(2), INTEGRAL DEFINIDA
c=0; d=1; f12 = log(x)*sqrt(x); r12=int(f12, c, d); % r12=-4/9
c=0; d=inf; f13 = exp(-x^2); r13=int(f13, c, d); % r13=pi^(1/2)/2
% SIMPLIFICACIONES Y SUSTITUCIONES
% collect: COLECTA TODOS LOS COEFICIENTES CON LA MISMA POTENCIA DE x
f14 = (x-1)*(x-2)*(x-3); r14=collect(f14); % r14=x^3-6*x^2+11*x-6
f15 = x*(x*(x - 6) + 11) - 6; r15=collect(f15); % r14=x^3-6*x^2+11*x-6
f16 = (1+x)*t + x*t; r16=collect(f16); % r16=(2*t)*x+t
% expand: DISTRIBUYE PRODUCTOS SOBRE SUMAS Y APLICA IDENTIDADES DE SUMAS
f17 = a*(x+y); r17=expand(f17); % r17=a*x + a*y
f18 = (x-1)*(x-2)*(x-3); r18=expand(f18); % r18=x^3 - 6*x^2 + 11*x - 6
f19 = x*(x*(x-6)+ 11)-6; r19=expand(f19); % r19=x^3 - 6*x^2 + 11*x - 6
f20 = exp(a + b); r20=expand(f20); % r20=exp(a)*exp(b)
f21 = cos(x + y); r21=expand(f21); % r21=cos(x)*cos(y) - sin(x)*sin(y)
f22 = cos(3*acos(x)); r22=expand(f22); % r22=4*x^3 - 3*x
f23 = 3*x*(x^2-1)+x^3; r23=expand(f23); % r23=4*x^3 - 3*x
% horner: TRANSFORMA UN POLINOMIO SIMBOLICO EN SU FORMA ENCADENADA
f24 = x^3-6*x^2+11*x-6; r24=horner(f24); % r24=x*(x*(x - 6) + 11) - 6
f25 = 1.1+2.2*x+3.3*x^2; r25=horner(f25); % r25=x*((33*x)/10+11/5)+11/10
% factor: EXPRESA f COMO UN PRODUCTO DE POLINOMIOS DE GRADO BAJO
f26 = x^3-6*x^2+11*x-6; r26=factor(f26); % r26=(x - 3)*(x - 1)*(x - 2)
f27 = x^3-6*x^2+11*x-5; r27=factor(f27); % r27=x^3 - 6*x^2 + 11*x - 5
f28 = x^6 + 1; r28=factor(f28); % r28=(x^2 + 1)*(x^4 - x^2 + 1)
% simplify: HERRAMIENTA PODEROSA DE PROPOSITO GENERAL PARA SIMPLIFICAR
f29 = x*(x*(x-6)+11)-6; r29=simplify(f29); % r29=(x - 1)*(x - 2)*(x - 3)
f30 = (1 - x^2)/(1 - x); r30=simplify(f30); % r30=x + 1
f31 = (1/a^3+6/a^2+12/a+8)^(1/3); r31=simplify(f31);
% r31=((2*a+1)^3/a^3)^(1/3)
f32 = exp(x)*exp(y); r32=simplify(f32); % r32=exp(x + y)
f33 = cos(x)^2 + sin(x)^2; r33=simplify(f33); % r33=1
% simple: ENCUENTRA UNA EXPRESION CON LA MENOR CANTIDAD DE CARACTERES
% syms a positive x;
f34 = (1/a^3 + 6/a^2 +12/a + 8)^(1/3); r34=simplify(f34);
% r34= (8*a^3 + 12*a^2 + 6*a + 1)^(1/3)/a
f35 = (1/a^3 + 6/a^2 +12/a + 8)^(1/3); r35=simple(f35); % r35=1/a + 2
f36 = cos(x) + i*sin(x); r36=simplify(f36); % r36=cos(x) + sin(x)*i
f37 = cos(x) + i*sin(x); r37=simple(f37); % r37=exp(x*i)
f38 = cos(x)^2 -sin(x)^2; r38=simple(f38); % r38=cos(2*x)
f39 = cos(x) + i*sin(x); r39=simple(f39); % r39=exp(x*i)
f40 = cos(3*acos(x)); r40=simple(f37); % r40=4*x^3 - 3*x
% pretty: HACE MAS VISIBLE LAS EXPRESIONES SIMBOLICAS
% >> pretty(f34) DEVUELVE:
% / 1 6 12 \1/3
% |---- + ---- + ---- + 8|
% | 3 2 a |
% \ a a /

A.1 Fundamentos de MATLAB 193
A.1.7. Simulacion de un Sistema de Control
El siguiente programa simula el sistema de control de posicion backstepping delprototipo MRE (Manipulador Robotico Esferico). El modelo dinamico de Lagrangedel MRE deducido en la subseccion ??, ecuacion (5.152), posee la forma:
M(q)q + P(q, q)q + d(q) = u q =
[q1
q2
]u =
[u1
u2
]
donde:
M =
[M11 00 M22
]P =
[P11 P12
P21 P22
]d =
[0
d21
]
M11 =Ra
nKmKA
(J1 + Jeq +
1
4m2L2sen
2q2
)
M22 =Ra
nKmKA
(J2 + Jeq +
1
4m2L2
)
P11 =Ra
nKmKA
(Beq +
n2KmKb
Ra
)
P12 =Ra
nKmKA
(1
2m2L2q1senq2 cos q2
)
P21 =Ra
nKmKA
(−1
4m2L2q1senq2 cos q2
)
P22 =Ra
nKmKA
(Beq +
n2KmKb
Ra
)
d21 =Ra
nKmKA
(−1
2m2L2gsenq2
)
El diseno de un controlador backstepping emplea el procedimiento descrito en laseccion ??, que en forma breve establece hasta el nivel de simulacion:
(1) Definir las especificaciones de diseno y determinar el modelo no lineal del sis-tema a controlar en la forma dada en (??).
(2) Determinar la ley de control backstepping dada en (??). Para ello, definir elvector de referencias deseadas qd, formular el vector de error e y el vector qr:
e = z1 = q − qd qr = qd − Kz1
donde K es una matriz diagonal con elementos k positivos. El observador seexpresa como:
˙q = qd + Ld(q − q)
donde Ld es una matriz diagonal con elemento ` positivos. El vector q se puedecalcular integrando ˙q. La ley de control backstepping posee la forma:
u = M(q)q + P(q, ˙q)qr + d(q) − Kd( ˙q − qr) − K1 z1
en donde Kd y K1 son matrices diagonales con elementos kd y k1 positivos,respectivamente.

194 Fundamentos de MATLAB y Simulink
(3) Simular el sistema de control backstepping empleando los parametros de sin-tonizacion kd, k1 y `d.
La Fig. A.2 muestra el diagrama de flujo empleado en esta publicacion parasimular los sistemas de control. El archivo bscmrer.m muestra el programa en codigoMATLAB para simular el el control simultaneo de las posiciones de los brazos delMRE empleando un controlador backstepping. Este archivo, que es autoexplicativo,emplea el diagrama de flujos de la Fig. A.2. El resultado de la simulacion se muestranen la Fig. A.3.
Señales de referencia
Almacenamiento de datosAlgoritmo de control
Inicio
Parámetros del sistemaParámetros de sintonización
Condiciones iniciales
Lazo de control
k = 1
Gráficos de resultados
¿k < N?
NO
SI
Fig. A.2: Diagrama de flujo para la simulacion de un sistema de control.
% bscmrer.m CONTROL BACKSTEPPING DEL MRE (MANIPULADOR ROBOTICO ESFERICO).
% CASO: REGULACION (REFERENCIA CONSTANTE EN EL TIEMPO)
clear all; close all; clc;
% DATOS DEL SUB-SISTEMA MECANICO
d = 0.01; rd = 0.06; b = 0.25; a = 0.044; La = 0.3; Lh = 0.05;
md = 0.55; mb = 0.9; ma = 0.8; mh = 0.15; g =9.81; n = 12.5;
m1 = md + mb; m2 = ma + mh; L1 = (mb*b + md*d)/(mb + md); L2 = La + Lh;
Jm = 0.0003; Jg = 0.053;
Jd = md*rd^2/2; Jb = mb*a^2/6; J1 = Jd+Jb; J2 = m2*L2/3; Jeq = n^2*Jm+Jg;
Bm = 0.0001; Bg = 0.01; Beq = n^2*Bm+Bg;

A.1 Fundamentos de MATLAB 195
% DATOS DEL SUB-SISTEMA ELECTRICO
Km = 0.0421; Kb=0.0564; Larm = 0; Ra = 5.3; KA = 12.5;
% PARAMETROS DE CONTROL
K = 5; K1=8; Ld=10; Kd=8;
% VALORES INICIALES
q1 = 0; q2 = 0; dq1 = 0; dq2 = 0; qe1 = 0; qe2 = 0;
% TIEMPO DE MUESTREO T (segundos) Y NUMERO DE ITERACIONES N
T= 0.01; N=4000; A = 1; % A: MAGNITUD DE LAS REFERENCIAS DESEADAS
% LAZO DE CONTROL
for k=1:N;
% REFERENCIAS DESEADAS qd1 Y qd2
if(k >= 0 && k <= N/4), qd1 = 0.5*A; qd2 = 0.1*A;
elseif(k >= N/4 && k <= N/2), qd1 = 0.2*A; qd2 = 0.7*A;
elseif(k >= N/2 && k <= 3*N/4), qd1 = 0.8*A; qd2 = 0.3*A;
elseif(k >= 3*N/4 && k <= N), qd1 = 0.3*A; qd2 = 0.5*A;
end
Qd1(k) = qd1; dqd1 = 0; ddqd1 = 0;
Qd2(k) = qd2; dqd2 = 0; ddqd2 = 0;
% ERROR DE SEGUIMIENTO
e1 = q1 - qd1; e2 = q2 - qd2;
z11 = e1; z22 = e2;
dqr1 = dqd1 - K*z11; dqr2 = dqd2 - K*z22;
% OBSERVADOR
dqe1 = dqd1 + Ld*(q1 - qe1); qe1 = qe1 + T*(dqe1);
dqe2 = dqd2 + Ld*(q2 - qe2); qe2 = qe2 + T*(dqe2);
% CONTROL
M11e = Ra*(J1 + Jeq + m2*L2*sin(qe2)^2/4)/(n*Km*KA);
M22 = Ra*(J2 + Jeq+m2*L2/4)/(n*Km*KA);
P11 = Ra*(Beq + n^2*Km*Kb/Ra)/(n*Km*KA);
P12e = Ra*m2*L2*dqe1*sin(q2)*cos(q2)/(2*n*Km*KA);
P21e = -Ra*m2*L2*dqe1*sin(q2)*cos(q2)/(4*n*Km*KA);
P22 = Ra*Beq + n^2*Km*Kb/Ra/(n*Km*KA);
d11 = 0;
d21e = -Ra*m2*L2*g*sin(qe2)/(2*n*Km*KA);
u1 = M11e*ddqd1 + P11*dqr1 + P12e*dqr2 + d11 - Kd*(dqe1 - dqr1) - K1*z11;
u2 = M22*ddqd2 + P21e*dqr1 + P22*dqr2 + d21e - Kd*(dqe2 - dqr2) - K1*z22;
U1(k) = u1; U2(k) = u2;
% MODELO DEL SISTEMA CONTROLADO
M11 = Ra*(J1 + Jeq + m2*L2*sin(q2)^2/4)/(n*Km*KA);
P12 = Ra*m2*L2*sin(q2)*cos(q2)*dq1/(2*n*Km*KA);
P21 = -Ra*m2*L2*dq1*sin(q2)*cos(q2)/(4*n*Km*KA);
d21 = -Ra*m2*L2*g*sin(q2)/(2*n*Km*KA);
dq1 = dq1 + T*(u1 - P11*dq1 - P12*dq2- d11)/M11;
dq2 = dq2 + T*(u2 - P21*dq1 - P22*dq2- d21)/M22;
q1 = q1 + T*dq1; Q1(k) = q1;
q2 = q2 + T*dq2; Q2(k) = q2;
end % FINALIZA EL LAZO DE CONTROL

196 Fundamentos de MATLAB y Simulink
% GRAFICOS
ejex=linspace(0,N*T,N); % EJE DE TIEMPO
subplot(411)
plot(ejex,Qd1(1:N),ejex,Q1(1:N)), grid on
ylabel(’POSICION q1 [rad]’)
subplot(412)
plot(ejex,U1(1:N)),grid on
xlabel(’TIEMPO [S]’)
ylabel(’CONTROL u1 [v]’)
subplot(413)
plot(ejex,Qd2(1:N),ejex,Q2(1:N)), grid on
ylabel(’POSICION q2 [rad]’)
subplot(414)
plot(ejex,U2(1:N)), grid on
xlabel(’TIEMPO [S]’)
ylabel(’CONTROL u2 [v]’)
print -f -deps dfsimr % GENERA FIGURA dfsimr.eps
0 5 10 15 20 25 30 35 400
0.5
1
PO
SIC
IÓN
q1
[rad]
0 5 10 15 20 25 30 35 40−50
0
50
TIEMPO [S]
CO
NTR
OL
u1 [v
]
0 5 10 15 20 25 30 35 400
0.5
1
PO
SIC
IÓN
q2
[rad]
0 5 10 15 20 25 30 35 40−50
0
50
TIEMPO [S]
CO
NTR
OL
u2 [v
]
Fig. A.3: Resultado de la simulacion del sistema de control backstepping del MRE:las posiciones de los brazos del manipulador siguen las senales de referencia deseada.

A.2 Fundamentos de Simulink 197
A.2. Fundamentos de Simulink
Simulink se ejecuta dentro del entorno de MATLAB y depende de este programapara definir y evaluar el modelo a simular y los bloques de parametros. Simulink tam-bien usa algunas caracterısticas de MATLAB, tales como: definicion de las entradasdel modelo, almacenamiento de las salidas del modelo para analisis y visualizacion,y realizar operaciones y funciones propias de MATLAB dentro del modelo.
Se recomienda los siguientes 6 pasos para modelar un sistema: (1) definir el sis-tema, (2) identificar los componenetes del sistema, (3) modelar el sistema con ecua-ciones, (4) elaborar el diagrama de bloques en Simulink, correr la simulacion, y (6)validar los resultados de la simulacion.
A.2.1. Fundamentos del Software Simulink
Para mostrar la biblioteca de bloques (Simulink Library Browser, Fig. A.4):
1. Abrir MATLAB, luego tipear simulink en el prompt.
2. Click el boton Start (extremo inferior izquierdo de la ventana MATLAB) yluego seleccionar: Simulink > Library Browser.
3. Click en el icono Simulink: ubicado en la barra de menus de MATLAB.
Para crear un nuevo modelo, seleccionar en el menu de la ventana Simulink LibraryBrowser: File > New > Model. El software abre una ventana vacıa (Fig. A.5) endonde construir el modelo.
Para abrir un modelo existente:
1. En el menu de la ventana Simulink Library Browser, seleccionar File > Open.En la ventana Open buscar el archivo con extension .mdl a abrir. Ubicado elarchivo, seleccionarlo y click Abrir. El software abre el archivo buscado en unaventana que tiene como etiqueta el nombre del archivo.
2. En la VC (ventana de comandos) de MATLAB, hacer click en el icono [...](tres puntos seguidos) ubicado en la parte superior derecha, para que aparezcala ventana Buscar carpeta. En esta ventana ubicarse en el directorio dondeesta el archivo .mdl. Luego, en el prompt de MATLAB, escribir el nombre delarchivo sin extension, para que aparezca el modelo buscado.
La ventana Library Browser (Fig. A.6) muestra la biblioteca de bloques de Simulinkinstaladas en su sistema. Los bloques se pueden copiar o arrastrar desde esta ventanaa la ventana del modelo window. Cuando use la ventana Simulink Library Browser,notar lo siguiente:
Los bloques de una biblioteca se pueden ver seleccionando el nombre de labiblioteca en la parte izquierda de la ventana Library Browser, o haciendodoble click en la biblioteca seleccionada.
Cuando se selecciona un bloque, su descripcion aparece en la parte inferior dela ventana Library Browser.

198 Fundamentos de MATLAB y Simulink
Fig. A.4: Librerıa de bloques (Simulink Library Browser).
Fig. A.5: Nueva ventana para construir un modelo.
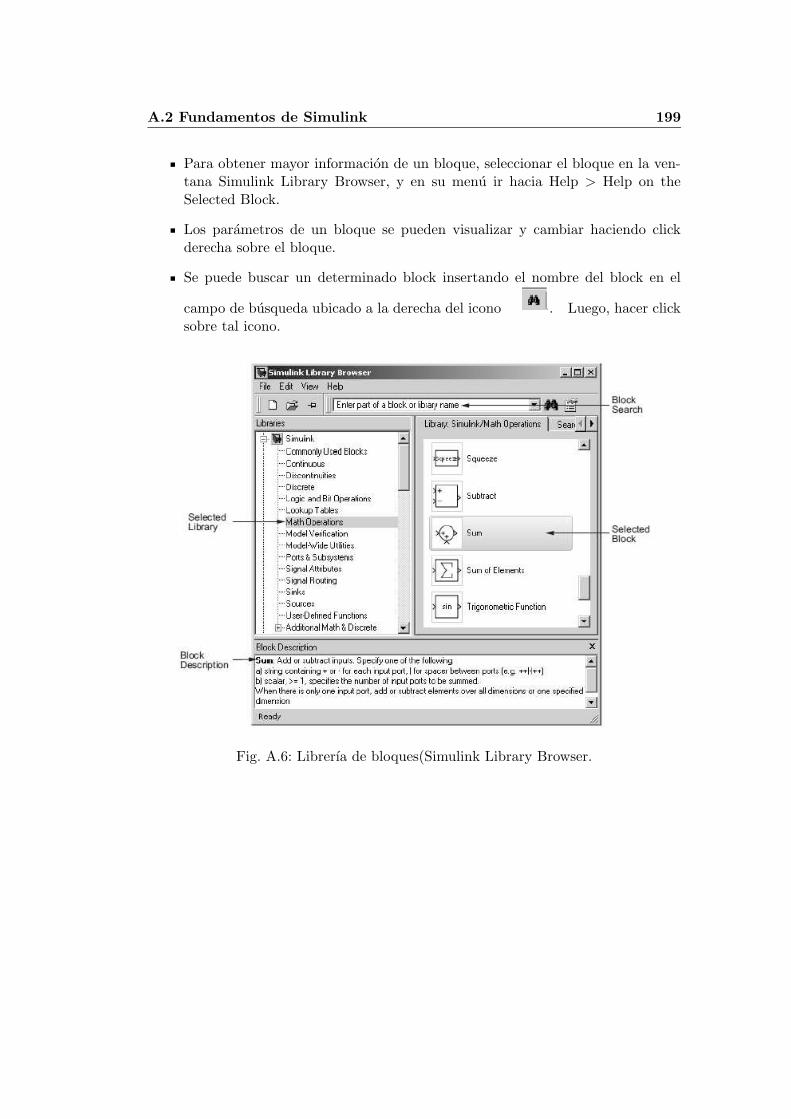
A.2 Fundamentos de Simulink 199
Para obtener mayor informacion de un bloque, seleccionar el bloque en la ven-tana Simulink Library Browser, y en su menu ir hacia Help > Help on theSelected Block.
Los parametros de un bloque se pueden visualizar y cambiar haciendo clickderecha sobre el bloque.
Se puede buscar un determinado block insertando el nombre del block en el
campo de busqueda ubicado a la derecha del icono . Luego, hacer clicksobre tal icono.
Fig. A.6: Librerıa de bloques(Simulink Library Browser.
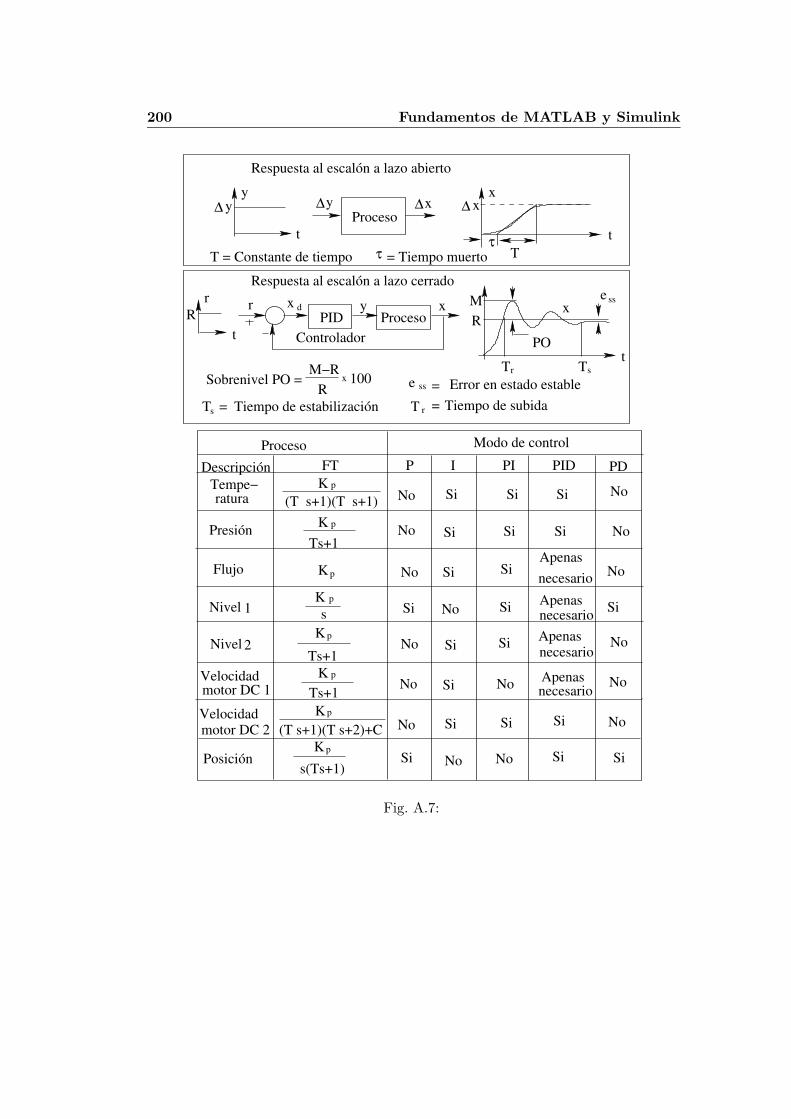
200 Fundamentos de MATLAB y Simulink
yy∆
τ
xx∆
T
Procesox∆y∆
t
ProcesoRr r
t
xydxPID
Controlador POt
xMR
e ss
T Tr s
t
Sobrenivel PO =R
M−R
Ts Tiempo de estabilización=
e ss ==
Error en estado estable
rT Tiempo de subida
100x
Descripción
Presión
T = Constante de tiempo τ = Tiempo muerto
Respuesta al escalón a lazo cerrado
Respuesta al escalón a lazo abierto
Flujo
Nivel
Nivel
Apenasnecesario
ApenasnecesarioApenasnecesario
No
No
No
Si
Si
PIP
No
Si
No2
1
Modo de control
FTProceso
raturaTempe−
Posición
K p
(T s+1)(T s+1)K p
Ts+1
K p
s
p
pK
K p
Ts+1K
Ts+1motor DC 1
motor DC 2Velocidad
Velocidad
s(Ts+1)
(T s+1)(T s+2)+CK p
K p
No Si
No Si
PID
Si
Si
PD
No
No
Si Si
Si Si
I
No
Si Si
No No Si Si
No Si Apenasnecesario
SiSiSiNo
Si
No
No
Fig. A.7:
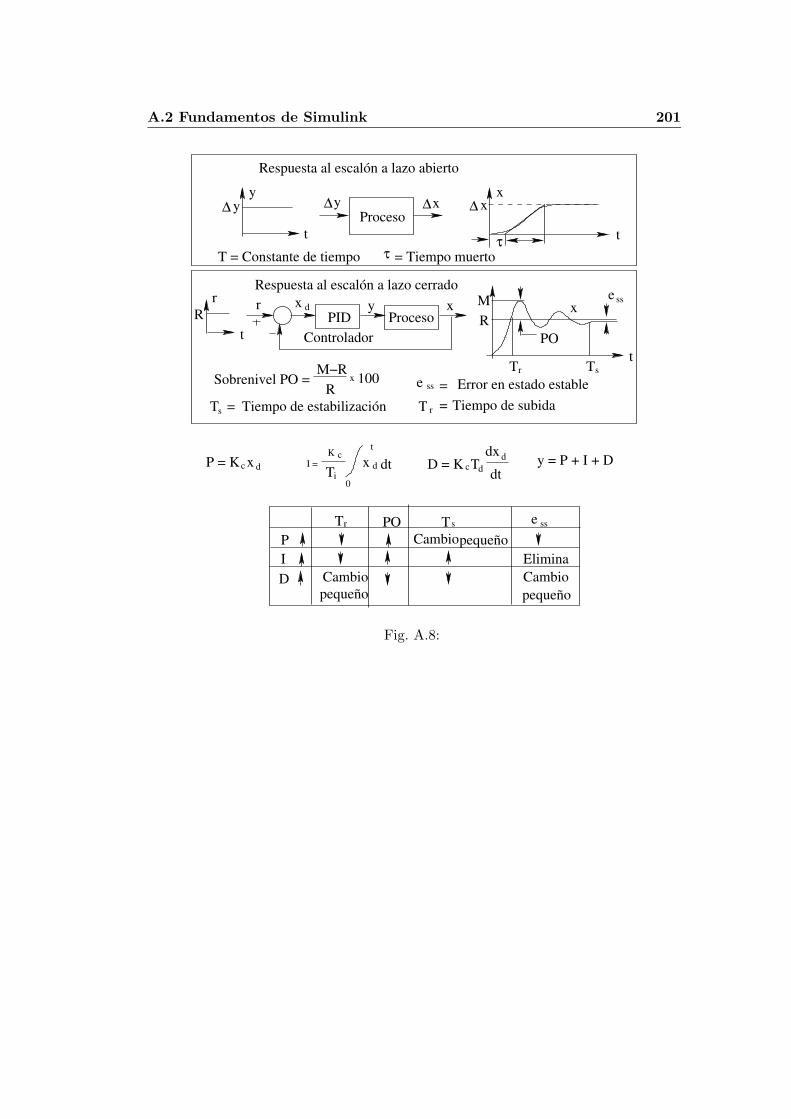
A.2 Fundamentos de Simulink 201
P = K xc d D = K Tc d
dx
dtd
I = K c
Tidx dtt
0
PID
PO T sTr
Cambiopequeño
Cambiopequeñoe ss
EliminaCambiopequeño
yy∆
τ
xx∆
Procesox∆y∆
t
ProcesoRr r
t
xydxPID
Controladort
xMR
e ss
T Tr s
t
Sobrenivel PO =R
M−R
Ts Tiempo de estabilización=
e ss ==
Error en estado estable
rT Tiempo de subida
100x
T = Constante de tiempo τ = Tiempo muerto
Respuesta al escalón a lazo abierto
y = P + I + D
PO
Respuesta al escalón a lazo cerrado
Fig. A.8:


Bibliografıa
[1] Wikipedia, http://es.wikipedia.org/wiki/Mecatr
[2] The MathWorks, Inc., Simulink 7, Getting Started Guide, 1990–2010.
[3] National Instruments, Getting Started with LabVIEW, June 2010, 373427G-01.
[4] A. Rojas-Moreno, Design of Self-tuning Controllers for Processes Having Multi-ple Unknown Time-varying Delays, Ph.D. Thesis, Utah State University, Logan,UT, 1995.
[5] Charles M. Close y Dean K. Frederick, Modeling and Analysis of Dynamic Sys-tems, 3rd Edition, Wiley, 2001.
[6] Murray R. Spiegel, Mathematical handbook, Shaum’s Outline Series, McGraw-Hill,Inc., 3ed Edition, New York et. al. 2008.
[7] W. F. Hughes and J. A. Brighton, Theory and Problems of Fluid Dynamics,Shaum’s outline series, McGraw-Hill, 3ed edition, Inc., 1999.
[8] H. Goldstain, John L. Safko and Charles P. Poole Classical mechanics, 3ed.Addison Wesley, 2001.
[9] James Curry, Hamiltonian and Lagrangian Mechanics. AuthorHouse, 2005.ISBN-10: 1420858564. ISBN-13: 978-1420858563.
[10] Eduardo F. Camacho y Carlos Bordons, Model Predictive Control, Springer-Verlag London Limited, 2004.
[11] Alberto Isidori, Nonlinear Control Systems, 3ed, Springer-Verlag Berlin, 1995.
[12] A. Barrientos, L. F. Penin, C. Balaguer, and R. Aracil, Fundamentos de Robotica,2nd Edition, McGraw-Hill/Interamericana de Espana, S. A., Madrid, Buenosaires, Caracas, and others, 2007.
[13] S. Kilicaslan, S.P. BanksLocalizacion, “A separation theorem for nonlinear sys-tems”, A journal of IFAC, ISSN 0005-1098, Vol. 45, No. 4, pags. 928-935, 2009.
[14] M. G. Sofonov, Stability and Robustness of Multivariable Feedback Systems, TheMIT Press Cambridge, MA, and London, England, 1980.
[15] Jeffrey B. Burl , Linear Optimal Control, Prentice Hall, 1998.

204 BIBLIOGRAFIA
[16] D. E. Koditschek, “Natural Motion for Robot Arms´´Proc. 23rd I.E.E.E. Conf.on Decision and Control, Las Vegas, p. 733, 1984.
[17] Jean-Jacques E. Slotine and Weiping Li, Applied Nonlinear Control, PrenticeHall, 2006, ISBN: 0130408905, ISBN-13: 9780130408907, 978-0130408907.
[18] Asif Sabanovic, Variable Structure Systems: From Principles to Implementation,The Institution of Engineering and Technology; illustrated edition, 2004.
[19] E. Bailey and A. Arapostathis, “Simple sliding mode control scheme applied torobot manipulators,” Int. J. Control, vol. 45, No. 4, p. 1197–1209, 1987.
[20] Lin, Y. and E.D. Sontag, Lin, Y. and E.D. Sontag, “A universal formula forstabilization with bounded controls”, Report 90-10, SYCON-Rutgers Center forSystems and Control, July 1990.
[21] Jie Yu, Ali Jadbabaie, James Primbs and Yun Huang, “Comparison of nonlinearcontrol design techniques on a model of the Caltech ducted fan”, AutomaticaVolume 37, Issue 12, Pages 1971-1978 , December 2001.
[22] Fang-Shiung Chen and Jung-Shan Lin, “Nonlinear backstepping design of robotmanipulators with velocity estimation feedback,”5th Asian Control Conference,July 2004, vol. 1, no. 6, pp 351–356. New Jersey 07632, 1989.
[23] M. Vidyasagar, Nonlinear Systems Analysis (Second Edition), Society for Indus-trial and Applied Mathematics Philadelphia, PA, USA , 2001, ISBN:0898715261.
[24] Katsuhiko Ogata, Modern Control Engineering (5th Edition), Prentice Hall,2009.
[25] Joseph La Salle and Solomon Lefschetz, Stability by Liapunov’s Direct MethodWith Applications, Academic Press new York, London, 1961.
[26] A. O’Dwyer, Handbook of PI and PID Controller Tuning Rules, 3rd edition,Imperial College Press, 2009.
[27] J.G. Ziegler y N.B. Nichols, “Optimum Setting for Automatic Controllers”,Transactions of the American Society Mechanical Engineering, Vol 64, pp. 759-768, 1942.
[28] Richard C. Dorf y Robert H. Bishop, Sistemas de Control Moderno (10ma Edi-cion), Pearson Prentice Hall, 2005.
[29] A. Rovira, P. Murrill y C. Smith, “Tuning controllers for setpoint changes”.Instruments and Control Systems, 42(12): 67–69, diciembre de 1969.
[30] M. Zhuang y D. P. Atherton, “Automatic tuning of optimum PID controllers”,IEE Proceedings–Part D: Control Theory and Applications, Vol. 140, No. 3, pp.216–224, 1993.
[31] Erwin Samal, Grundriss der Praktischen Regelungstechnik (11. durchsehene Au-flage, R. Oldenbourg Verlag Muenchen Wien 1980.

BIBLIOGRAFIA 205
[32] P. Harriot, Process Control, McGrawHill Book Co., 1964.
[33] G. H. Cohen and G. A. Coon, “Theoretical consideration of retarded control,”Trans. ASME, vol. 75, pp. 827-834, 1953.
[34] A. M. Lopez, J. A. Miller, C. L. Smith, and P. W. Murrill, “Tuning controllerswith error-integral criteria,” Instrumentation Technology, vol. 14, pp. 57–62,1967.
[35] F.S. Wang, W.S. Juang y C.T. Chan,“Optimal tuning of PID controllers forsingle and cascade control loops”. Chemical Engineering Communications, Vol.132, pp 15–34, 1995.
[36] C. Kessler, C., “Das symmetrische Optimum”, part 1, rt, No.11, pp. 395-400 andpart 2, rt, No.12, pp. 432-436, (1958)
[37] D. Xue, Y. Q. Chen y D. P. Atherton, Linear Feedback Control: Analysis andDesign with Matlab, SIAM, 2007.
[38] R. Canales Ruiz y R. Barrera Rivera, Analisis de Sistemas Dinamicos y ControlAutomatico, Editorial Limusa, Mexico, 1997.
[39] TecQuipment Ltd, TE37 Control and Instrumentation Study Station, UserGuide, 2009.
[40] K.L. Chien, J. A. Hrones, and J. B. Reswick, “On the automatic control ofgeneralized passive systems”, Trans. ASME, vol. 74, pp. 175-185, 1952.
[41] K.J. Astrom y T. Hagglund, “PID Controllers: Theory, Design, and Tuning”.Instrument Society of America, 1995.
[42] Murray R. Spiegel, Analisis Vectorial, serie de compendios Schaum, McGraw-Hill Mexico Panama Bogota y otras, 1973 (o ediciones mas recientes).
[43] Murray R. Spiegel, Calculo Superior, serie de compendios Schaum, McGraw-HillMexico Panama Bogota y otras, 1973 (o ediciones mas recientes).
[44] Donald M. Wiberg, Espacio de Estado y Sistemas Lineales, serie de compendiosSchaum, McGraw-Hill Mexico Panama Bogota y otras, 1973 (o ediciones masrecientes).
[45] Frank Ayres Jr., Matrices, serie de compendios Schaum, McGraw-Hill MexicoPanama Bogota y otras, 1973 (o ediciones mas recientes).
[46] Alan V. Oppenheim y Alan S. Willsky, Senales y Sistemas Prentice-Hall His-panoamericana, S.A., Mexico-Englewood Cliffs-Londres-Sidney y otras, 1983.
[47] Katsuhiko Ogata, Sistemas de Control en Tiempo Discreto. Prentice Hall His-panoamericana S.A., Mexico, segunda edicion, 1996
[48] N.A. Lehtomaki, N.R. Sandell Jr. y M. Athans, Robustness Results on LQGBased Multivariable Control System designs, IEEE Trans. on Automatic Control,Vol. AC–26, No. 1, February 1981, pp. 75–93.

206 BIBLIOGRAFIA
[49] WolframAlpha computational knowledge engine: www.wolframalpha.com, 2011.

Indice alfabetico
Aplicacion: controloptimo del MRE, 260adaptativo del MRE, 272backstepping del MR1, 303backstepping del MRE, 304backstepping del MRT, 305deslizante del MR1, 289deslizante del MRE, 290deslizante del MRT, 292
Campo vectorial suave, 312Campos vectoriales, 312Chattering, 284Configuracion del sistema de
control optimo, 249control adaptativo, 265control por realimentacion, 328
Conjuntocompletamente integrable, 313invariante global, 377invariante local, 376involutivo, 314
Controlabilidad completa, 253, 315
Definicion de funciones y matrices, 371Determinante, 23
de una matriz, 23propiedades, 23
Difeomorfismo, 313Discretizacion directa, 55
Ecuacion caracterıstica, 39Ecuacion de estado del sistema de
control optimo, 250control MIMO por linealizacion, 319control SISO por linealizacion, 314
Ecuacion de Riccati, 253Ecuaciones de Lagrange, 139Eigenvalor, 30Eigenvector, 30
Estabilidad de sistemas, 59Estado de equilibro, 369
Formula de Sontag, 298Filtro de Kalman, 255Forma canonica
controlable, 51de Jordan, 53diagonal, 52observable, 52
Forma normalMIMO, 321SISO, 317
Formas canonicas, 50Fracciones parciales, 14Funcion de costo cuadratica, 253Funcion de Lyapunov, 268, 286, 297
para sistemas autonomos, 370para sistemas no autonomos, 373
Funcion Lagrangiana, 139
Grua puente, 128Grua-puente
modelo, 128Grado
relativo, 316relativo total, 320
Ley de adaptacion de parametros, 268Ley de control
optima PI, 253adaptativa, 267backstepping, 302deslizante, 286, 287MIMO por linealizacion, 322SISO por linealizacion, 317
LieCorchetes de, 312Derivadas de, 312
Linealizacion de sistemas, 59

208 INDICE ALFABETICO
Linealizacion exactaen sistemas MIMO, 321en sistemas SISO, 317
Linealizacion por realimentacion de es-tados, 311
LyapunovEstabilidad en el sentido de, 370Funcion de, 277
Matrices, 20diagonalizacion de, 33multiplicacion de, 20
Matrices Jacobianas, 251Matriz
de controlabilidad, 40de transferencia, 38diagonal, 22eigenvalor de una, 30identidad, 22pseudoinversa de una, 32rango de una, 29traza de una, 22triangular inferior, 22triangular superior, 22
Modelo de Lagrange para elsistema prototipo MRT, 145SCAMR, 266sistema de control backstepping, 300sistema de control deslizante, 284sistema MRAE, 122sistema prototipo MR1, 119sistema prototipo MRE, 152
Objetivo de control en elSCAMR, 265sistema de control optimo, 249
Observabilidad completa en sistemasde control optimo, 255de control por linealizacion, 324
Observadoroptimo no lineal, 254de velocidad, 268, 302MIMO con polos prescritos, 327SISO con polos prescritos, 325
Pendulo invertidomodelo, 124
Pendulo invertido traslacional, 124
Parametros y variablesde los sistemas MR1 y MRAE, 115del sistema MRE, 148del sistema MRT, 141
Parametros, variables y sımbolosdel sistema Tanque con Agua, 133
Principio de la mınima accion de Hamil-ton, 139
Principio de la separacion, 254Procedimiento de diseno de sistemas de
control optimo, 256control adaptativo, 269, 278control backstepping, 302control deslizante, 288control no lineal, 8control por linealizacion, 328
Propiedad de parametrizacion, 268Puntos singulares en SLITs, 40
Ruido blanco Gaussiano, 254
SCARM: Sistema de Control Adapta-tivo con Modelo Referencial, 266
Sistema causal, 9Sistema estable e inestable, 40Sistema PLIT, 59Sistema prototipo
MR1, 3, 114MRAE, 3, 120MRE, 4, 146MRT, 5, 139PIT, 4
Sistemas con tiempo muerto, 57Solucion de la ecuacion de estado, 43Superficies de deslizamiento, 267, 283,
284
Teorema de Frobenius, 313Teorema de inestabilidad
de Ceteav, 374para sistemas no autonomos, 375
Teoremas de estabilidad parasistemas autonomos, 374sistemas no autonomos, 375
Transformada de LaplaceFormulas de, 14inversa, 12Propiedades de la, 17

INDICE ALFABETICO 209
unilateral, 9, 10
Variables de estado, 34Vector de
informacion, 267Vectores residuales, 251
Zona muerta, 269