storia della scienza delle costruzioni - m2structures.com · politecnico di milano dipartimento di...
TRANSCRIPT
Politecnico di MilanoDipartimento di Ingegneria Strutturale
Scuola di Dottorato in Ingegneria Strutturale,Sismica e Geotecnica
Storia della Scienza delle CostruzioniProf. Giannantonio Sacchi Landriani
Evoluzione storica dei sistemi di funiMilano, 9 Dicembre 2010
Approfondimento a cura di:
Manuel [email protected]
Dottorando - Ciclo XXVI - Politecnico di Milano

INDICE 1
Indice
1 Introduzione 2
2 Il dibattito sull’equilibrio funicolare 3
3 Le soluzioni analitiche 53.1 La catenaria inestensibile . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.1.1 Integrale dell’equazione della funicolare . . . . . . . . . . . . . . . . 73.1.2 Condizioni al contorno e quantità operative . . . . . . . . . . . . . . 73.1.3 Evoluzione delle configurazioni . . . . . . . . . . . . . . . . . . . . . 8
3.2 La parabola inestensibile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.2.1 Un caso particolare: appoggi allo stesso livello . . . . . . . . . . . . . 12
3.3 Confronti fra catenaria e parabola . . . . . . . . . . . . . . . . . . . . . . . 133.4 La catenaria elastica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.4.1 Equilibrio e legame elastico . . . . . . . . . . . . . . . . . . . . . . . 133.4.2 Le soluzioni parametriche . . . . . . . . . . . . . . . . . . . . . . . . 14
3.5 Risposta per carichi concentrati . . . . . . . . . . . . . . . . . . . . . . . . . 153.5.1 Risposta ad un singolo carico concentrato . . . . . . . . . . . . . . . 153.5.2 Risposta ad un sistema di carichi concentrati . . . . . . . . . . . . . 17
4 Rigidezza di un filo teso 214.1 Studio esatto mediante la catenaria elastica . . . . . . . . . . . . . . . . . . 214.2 Il Modulo di elasticità apparente . . . . . . . . . . . . . . . . . . . . . . . . 22
5 Conclusioni 25
Bibliografia 26

1 Introduzione 2
1 Introduzione
Le strutture tensili, composte da funi e membrane, figurano tra le prime espressioni tec-nologiche dell’uomo. Le funi erano canapi vegetali ritorti e intrecciati, le membrane eranopatchworks di pelli animali e, successivamente, di teli intrecciati. I manufatti così realizzatierano tende o passerelle sospese.
Figura 1: Prime espressioni tecnologiche.
Lo studio dei sistemi tensili, e delle funi in particolare, fu anche uno dei primi argo-menti trattati e risolti con rigore dalla meccanica moderna con l’ausilio dei primi elementidell’analisi infinitesimale, Tab. 1.
Anno Autore Oggetto1452-1519 Leonardo da Vinci Primi studi sulle funi
1614 Beeckman Ponte sospeso: andamento parabolico1638 G. Galilei La parabola inestensibile1646 Huygens La parabola di Galileo può essere sbagliata1673 G. Pardies La parabola di Galileo è sbagliata1691 Huygens, Leibniz e G. Bernoulli La Catenaria inestensibile1891 Routh La Catenaria elastica1975 M. Irvine La Catenaria elastica sotto
l’azione di carichi concentrati
Tabella 1: Evoluzione della teoria delle funi.
L’avvento dei materiali metallici con caratteristiche affidabili, Tab. 2, fece delle strutturesospese a funi le più ardite costruzioni ingegneristiche dell’800, affermando lo schema deiponti sospesi di grande luce, Tab. 3.
Anno Procedimento1784 - Ferro puddellato1790 Cort Ghisa1794 Wilkinson Ghisa1855 Bessemer Acciaio1855 Siemens Acciaio1894 Martin Acciaio1855 Roebling Cordatura dei cavi
Tabella 2: Evoluzione dei materiali impiegati nei sistemi tensili.
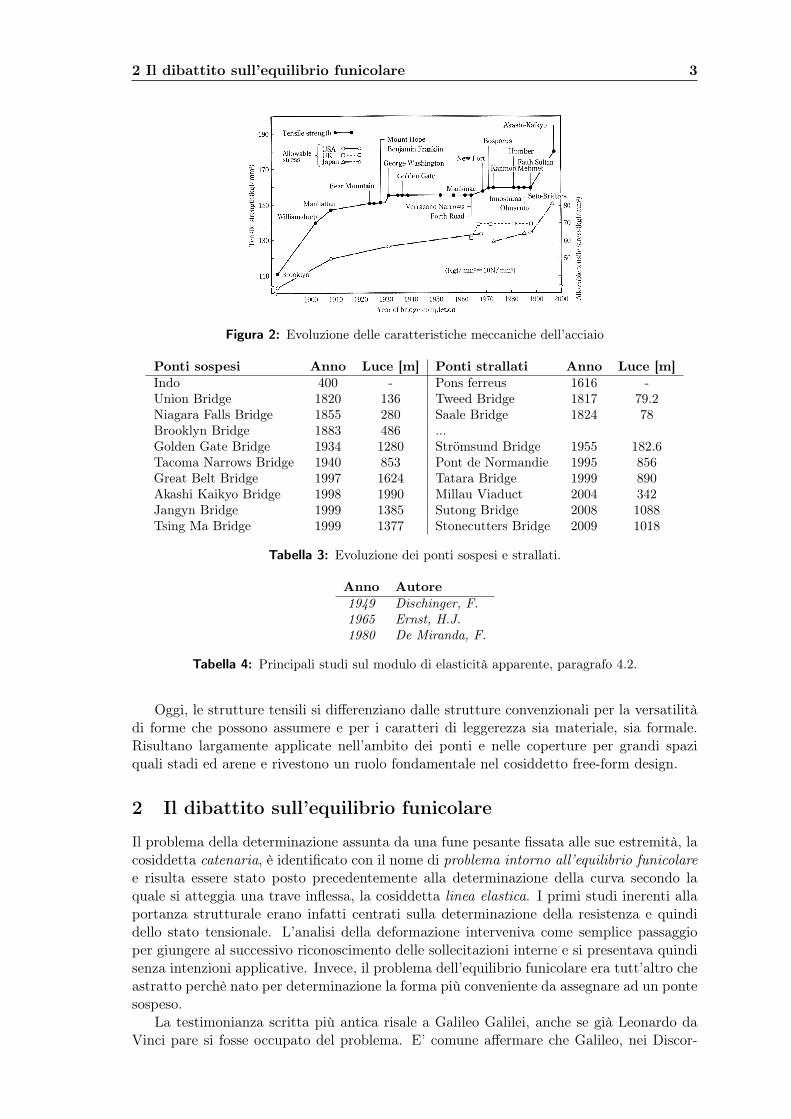
E’ singolare osservare che il successo della tipologia di ponte sospeso si accompagna alcontemporaneo e severo insuccesso dei ponti retti da stralli. Questi ultimi infatti riesconoad affermarsi solo dopo la seconda guerra mondiale. E’ altrettanto singolare osservare chequesto sblocco, oltre che al progresso tecnologico degli acciai e dei sistemi di produzionedelle funi, Fig. 2, è dovuto in gran parte alla piena comprensione (a 300 anni da Huy-gens) del ruolo delle non linearità geometriche sulla risposta strutturale dei sistemi di funi(Tab. 4), che restano un’importante nicchia di interesse anche nel settore della ricerca.
2 Il dibattito sull’equilibrio funicolare 3
Figura 2: Evoluzione delle caratteristiche meccaniche dell’acciaio
Ponti sospesi Anno Luce [m] Ponti strallati Anno Luce [m]Indo 400 - Pons ferreus 1616 -Union Bridge 1820 136 Tweed Bridge 1817 79.2Niagara Falls Bridge 1855 280 Saale Bridge 1824 78Brooklyn Bridge 1883 486 ...Golden Gate Bridge 1934 1280 Strömsund Bridge 1955 182.6Tacoma Narrows Bridge 1940 853 Pont de Normandie 1995 856Great Belt Bridge 1997 1624 Tatara Bridge 1999 890Akashi Kaikyo Bridge 1998 1990 Millau Viaduct 2004 342Jangyn Bridge 1999 1385 Sutong Bridge 2008 1088Tsing Ma Bridge 1999 1377 Stonecutters Bridge 2009 1018
Tabella 3: Evoluzione dei ponti sospesi e strallati.
Anno Autore1949 Dischinger, F.1965 Ernst, H.J.1980 De Miranda, F.
Tabella 4: Principali studi sul modulo di elasticità apparente, paragrafo 4.2.
Oggi, le strutture tensili si differenziano dalle strutture convenzionali per la versatilitàdi forme che possono assumere e per i caratteri di leggerezza sia materiale, sia formale.Risultano largamente applicate nell’ambito dei ponti e nelle coperture per grandi spaziquali stadi ed arene e rivestono un ruolo fondamentale nel cosiddetto free-form design.
2 Il dibattito sull’equilibrio funicolare
Il problema della determinazione assunta da una fune pesante fissata alle sue estremità, lacosiddetta catenaria, è identificato con il nome di problema intorno all’equilibrio funicolaree risulta essere stato posto precedentemente alla determinazione della curva secondo laquale si atteggia una trave inflessa, la cosiddetta linea elastica. I primi studi inerenti allaportanza strutturale erano infatti centrati sulla determinazione della resistenza e quindidello stato tensionale. L’analisi della deformazione interveniva come semplice passaggioper giungere al successivo riconoscimento delle sollecitazioni interne e si presentava quindisenza intenzioni applicative. Invece, il problema dell’equilibrio funicolare era tutt’altro cheastratto perchè nato per determinazione la forma più conveniente da assegnare ad un pontesospeso.
La testimonianza scritta più antica risale a Galileo Galilei, anche se già Leonardo daVinci pare si fosse occupato del problema. E’ comune affermare che Galileo, nei Discor-

2 Il dibattito sull’equilibrio funicolare 4
si, abbia espresso il parere che la curva cercata sia una parabola. Gli autori successiviimpostarono addirittura una campagna denigratoria nei suoi confronti.
Figura 3: Galileo Galilei, Discorsi.
Tutto ciò desta alcune curiosità, primo perchètale deduzione non è totalmente errata, come si ve-drà, ma è al massimo imprecisa e secondo perchètale affermazione non può essergli attribuita, per-chè lo stesso Galileo, nei Discorsi, lasciò intenderel’approssimazione del suo risultato: ‘‘Ma più vogliodirvi, recandovi insieme maraviglia e diletto, che lacorda così tesa, e poco o molto tirata, si piega in li-nee, le quali assai si avvicinano alle paraboliche: e lasimilitudine è tanta, che se voi segnerete in una su-perficie piana ed eretta all’orizonte una linea parabol-ica, e tenendola inversa, cioè col vertice in giù e conla base parallela all’orizonte, facendo pendere unacatenella sostenuta nelle estremità della base dellasegnata parabola, vedrete, allentando più o meno ladetta catenuzza, incurvarsi e adattarsi alla medesi-ma parabola, e tale adattamento tanto più esser pre-ciso, quanto la segnata parabola sarà men curva, cioèpiù distesa; sì che nelle parabole descritte con ele-vazioni sotto a i gr. 45, la catenella camina quasi adunguem sopra la parabola”.
Qualche tempo prima, Beeckman si era rivolto aCartesio ponendogli alcuni quesiti inerenti alla funesospesa. Ma Cartesio non volle occuparsi della cosa, (Benvenuto, 1981). Lo stesso Beeck-man però, a cavallo fra il 1614 e il 1615, diede la soluzione del problema del ponte sospesonel quale la fune portante, pensata come non pesante, sopporta carichi uniformementedistribuiti. Mediante una parziale dimostrazione geometrica, egli giunse alla conclusione,corretta, che tale fune si atteggia come una parabola.
Anche Huygens, intorno al 1646 giunse allo stesso risultato. In particolare, egli dedicòmolta attenzione a confutare il lavoro di Galileo che, morto 4 anni prima, non ebbe l’occa-sione di ricordagli come la sua affermazione riguardasse solamente il caso di funi molto tese.Nel 1673 Ignazio Gastone Pardies enunciò un teorema fondamentale che dimostra comeuna fune omogenea pesante non possa atteggiarsi secondo un profilo parabolico, Fig. 4.
Figura 4: Teorema di Pardies.
Ma la discussione sulla catenaria divampò nel1690, quando Giacomo Bernoulli ne propose il prob-lema all’attenzione degli scienziati del tempo tramiteuna sua memoria pubblicata dagli ‘‘Acta Erudito-rum” di Lipsia. Subito Liebniz risponde annuncian-do la possibilità di utilizzare la ‘‘sua chiave’’, cioèil calcolo differenziale, per giungere alla soluzione,(Benvenuto, 1981).
Nel medesimo anno anche Huygens si mette al la-voro e insistenetemente chiede per lettera a Liebniz,utilizzando per la prima volta il termine catenaria,notizie sugli esiti della ricerca con il nuovo algoritmo. Nell’attesa studia per suo conto eottiene qualche risultato, seppur limitato e involuto, che invia a Liebniz perchè lo pubblichipresso gli ‘‘Atti” di Lipsia. E infatti, il giugno del 1691, esce un numero memorabile degli‘‘Acta Eruditorum”. L’editore, presentando il volume, scrive: Il benevolo lettore ricorderàsenz’altro il problema proposto dall’illustre Professore Giacomo Bernoulli di Basilea. Il
3 Le soluzioni analitiche 5
celebre Guglielmo Goffredo Leibniz aveva promesso di render nota una soluzione ottenutacol suo metodo, se nessun altro l’avesse trovata entro la fine dell’anno. In realtà, il fratel-lo del proponente, il Signor Giovanni Bernoulli, studioso di Medicina e molto versato inqueste ricerche, trovò la soluzione e la mandò a noi il Dicembre scorso; inoltre, tramitesuo fratello, egli ci chiese molto gentilmente di aggiungere alla sua quella di Liebniz. Perquesto, sollecitammo il celebre Signore sopra menzionato a pubblicare il suo risultato.(...)Anche il Nobile Christian Huygens si è degnato di ornare il nostro Giornale della soluzioneal problema. Quindi vi presentiamo, benevolo lettore, le due soluzioni di questi illustriNobiluomini e quella di Bernoulli, ma nell’ordine in cui le ricevemmo.
Truesdell commentò e distinse i tre lavori con la frase: ‘‘Per il 1690, le tre soluzioni,nell’ordine di consegna, mostrano la matematica del futuro, del presente e del passato’’.
Figura 5: La dimostrazione di Leibniz.
Huygens si muove ancora nell’area culturale vec-chia, esercitando, sia pur con grande perizia, il comp-lesso metodo geometrico. Leibniz invece dà la formu-la analitica corretta della catenaria, Fig. 5, pur senzaoffrire sufficienti giustificazioni meccaniche. E’ tut-tavia lecito pensare che la base del suo ragionamentofosse il teorema di Pardies, come egli stesso spiegheràin una famosa lettera del 1964 a Huygens, in rispostaa una ‘‘lunga sequela di domande, di recriminazionie di accuse”.
Per ultimo, il contributo di Giovanni Bernoul-li, dal titolo ‘‘Solutio problematis funicularis’’, offredue costruzioni corrette della catenaria e ne enumerasvariate proprietà.
Per concludere, è importante sottolineare come ilcompimento dello studio della catena pesante intro-dusse un concetto nuovo per la meccanica dei con-tinui: l’esigenza e la possibilità di esprimere in formadifferenziale le equazioni di equilibrio, imponendo,appunto, l’equilibrio per ogni elemento infinitesimo del corpo. Lo studio della fune sospesafu, in altre parole, il primo degli argomenti trattati e risolti con rigore dalla meccanicamoderna con l’ausilio dei primi elementi dell’analisi infinitesimale.
3 Le soluzioni analitiche
Nelle trattazioni che seguono si richiamano le seguenti soluzioni analitiche:
- la catenaria inestensibile;
- la parabola inestensibile;
- la catenaria elastica;
- la catenaria elastica sotto carichi concentrati;
3.1 La catenaria inestensibile
Si ritiene il cavo:
• perfettamente flessibile (EI ∼= 0);
• inestensibile (EA→∞);

3.1 La catenaria inestensibile 6
• in grado di sopportare soli sforzi di trazione.
Si consideri un tratto infinitesimo del filo:
e si imponga l’equilibrio alla traslazione.
- Traslazione lungo x:
Tdx
ds+
d
ds
(Tdx
ds
)∆s− T dx
ds= 0, (1)
da cui:
Tdx
ds= cost ≡ H → T = H
ds
dx; (2)
- Traslazione lungo y:
Tdy
ds+
d
ds
(Tdy
ds
)∆s− T dy
ds+ g∆s = 0, (3)
da cui:d
ds
(Tdy
ds
)= −g. (4)
Introducendo la (2), si trova:
d
ds
(Hds
dx
dy
ds
)= −g; (5)
differenziando rispetto ad x si perviene alla:
d
dx
(Hdy
dx
)= −g ds
dx; (6)
e portando H fuori dall’operatore differenziale (in quanto costante), si ottiene
Hd2y
dx2= −g ds
dx. (7)
Essendo:
ds =√dx2 + dy2 =
√√√√dx2
(1 +
(dy
dx
)2)
= dx√
1 + y′2, (8)
si perviene all’equazione indefinita d’equilibrio o equazione della funicolare:
Hd2y
dx2= −g
√1 + y′2. (9)

3.1 La catenaria inestensibile 7
3.1.1 Integrale dell’equazione della funicolare
Separando le variabili e ponendo y′ = dy/dx, si ha:
dy′√1 + y′2
= − g
Hdx, (10)
che integrata fornisce∫dy′√
1 + y′2= − g
H·x+ cost. (11)
Operando la trasformazione di coordinate y′ = Shu si ottiene:∫Chu · du√
Ch2u+ Sh2u− Sh2u=
∫Chu
Chu= u+ cost. (12)
Raggruppando le due cost in C si perviene all’espressione:
u = − g
Hx+ C, (13)
cioè
y′ = Shu = Sh(− g
Hx+ C
), (14)
da cui, integrando una volta, si giunge all’equazione di equilibrio della catenaria:
y(x) = −HgCh(− g
Hx+ C
)+D. (15)
3.1.2 Condizioni al contorno e quantità operative
Con riferimento al disegno sottostante,
si pone:
β =gl
2Hα = Sh−1
(βh
l
1
Shβ
), (16)
e con le condizioni agli estremi y(x = 0) = 0 e y(x = l) = h, la (15) diventa:
y(x) =H
g
(Chα− Ch
(2β
lx− α
)). (17)

3.2 La parabola inestensibile 8
Con tale equazione, assegnato il valore di H o assegnata l’ordinata in un punto nel cavorisulta definita la geometria. Dalla (17) si possono ricavare tutte le grandezze di interesse,(Malerba, 2010):
TA = HChα; TB =g
2(L ·Cothα− h) ; (18)
VA = HShα; VB =g
2(h ·Cothβ − L) ; (19)
L =2H
g·Shβ ·Ch (α− β) ; (20)
L =H
gln
(TA + TB − glTA + TB + gl
); (21)
∆Le =L
EA
(H
L
)2
; (22)
h =VA + VBTA + TB
·L. (23)
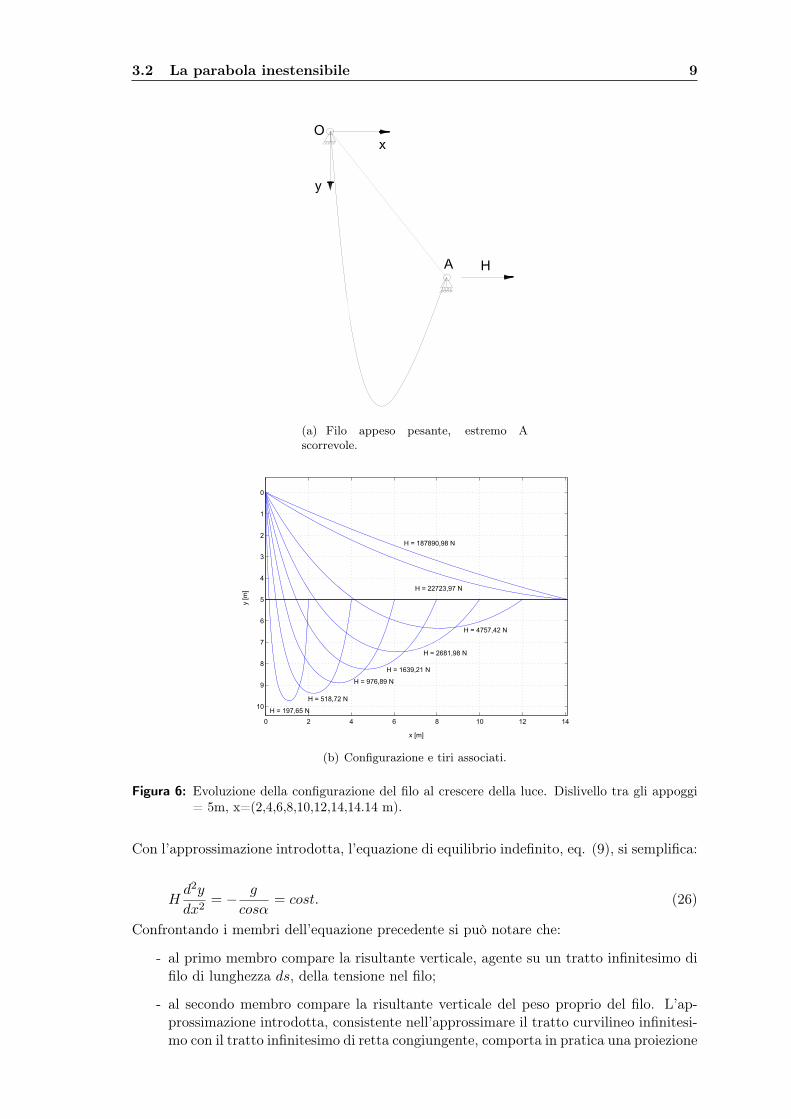
3.1.3 Evoluzione delle configurazioni
In Fig. 6(a) è rappresentato il problema studiato. Si tratta di un filo di lunghezza L0 = 15m,appeso agli estremi O ed A e soggetto ad un peso proprio di entità 800N/m. Il puntoO è fisso, mentre A è vincolato a scorrere su una guida orizzontale. Al variare delladistanza tra gli estremi si è determinata la componente di tiro necessaria risolvendo, conun procedimento iterativo, l’equazione (20).
3.2 La parabola inestensibile
E’ stato richiamato come molti autori, tra cui Galileo, intuirono una somiglianze fra ilprofilo esatto e quello parabolico. Nel seguito si mostrano le motivazioni.
Facendo riferimento a funi molto tese, caso di notevole interessa pratico per le strutturecivili, si può pensare di approssimare il tratto di filo con il tratto di congiungente gli estremi.
Introducendo l’angolo α, definito come l’angolo che la congiungente gli estremi forma conl’orizzontale, si ha
ds
l/cosα= dx/l, (24)
da cui
ds
dx∼=l/cosα
l= 1/cosα. (25)
3.2 La parabola inestensibile 9
(a) Filo appeso pesante, estremo Ascorrevole.
0 2 4 6 8 10 12 14
0
1
2
3
4
5
6
7
8
9
10
x [m]
y [m
]
H = 197,65 N
H = 518,72 N
H = 976,89 N
H = 1639,21 N
H = 2681,98 N
H = 4757,42 N
H = 22723,97 N
H = 187890,98 N
(b) Configurazione e tiri associati.
Figura 6: Evoluzione della configurazione del filo al crescere della luce. Dislivello tra gli appoggi= 5m, x=(2,4,6,8,10,12,14,14.14 m).
Con l’approssimazione introdotta, l’equazione di equilibrio indefinito, eq. (9), si semplifica:
Hd2y
dx2= − g
cosα= cost. (26)
Confrontando i membri dell’equazione precedente si può notare che:
- al primo membro compare la risultante verticale, agente su un tratto infinitesimo difilo di lunghezza ds, della tensione nel filo;
- al secondo membro compare la risultante verticale del peso proprio del filo. L’ap-prossimazione introdotta, consistente nell’approssimare il tratto curvilineo infinitesi-mo con il tratto infinitesimo di retta congiungente, comporta in pratica una proiezione

3.2 La parabola inestensibile 10
del peso proprio lungo la suddetta congiungente. Cioè, in parole più semplici, si con-fonde il peso per unità di lunghezza del cavo con il peso per unità di proiezione lungola congiungente.
In questo modo, correttamente, la risultante complessiva del peso proprio si conserva, maci si è ricondotti ad una scrittura più comoda, come si evince da quanto segue:
g∆s ∼=∆x
cosα=
g
cosα∆x. (27)
L’equazione di equilibrio può ora essere riscritta ed integrata:
d2y
dx2= − g
Hcosα, (28)
y(x) = − g
Hcosα
x2
2+ C1x+ C2. (29)
Si impongono ora le condizioni al contorno per determinare le costanti di integrazione:
y(0) = 0 → C2 = 0
y(l) = h → C1 =h
l+
gl
2H cosα
Introducendole nell’equazione (29), si ottiene:
y(x) = − g
2Hcosαx2 +
(h
l+
gl
2H cosα
)x, (30)
la quale rappresenta l’equazione approssimata di un filo teso tra due estremi, di andamentosufficientemente vicino alla corda; l’andamento è, come facilmente osservabile, parabolico.
A questo punto si vuole determinare il legame esistente tra la freccia (misurata rispettoalla congiungente e non rispetto all’orizzontale) e la componente orizzontale del tiro nelcavo, che diventerà utile successivamente.
y
(l
2
)=y(0) + y(l)
2+ f =
h
2+ f → f =
gl2
8H cosα. (31)
Si ricava ora l’espressione analitica della lunghezza del filo, in modo tale da disporre diun’equazione che lega il tiro nel cavo e la sua lunghezza. Per definizione:
L =
∫ L0
0ds =
∫ l
0
√1 + y′2dx =
∫ l
0
√1 +
(dy
dx
)2
dx. (32)
Sviluppando in serie di Taylor e introducendo un cambio di variabile t = dy/dx, si ha:
y(t) = y (t0) + y′ (t0) · (t− t0) +1
2y′′ (t0) · (t− t0)2 + t.o.s. (33)

3.2 La parabola inestensibile 11
prendendo il punto t0 = 0, lo sviluppo in serie di Mc Laurin è:
y(t) = y (0) + y′ (0) · t+1
2y′′ (0) · t2 + t.o.s. (34)
Nel caso in esame:y(t) =
√1 + t2
y′(t) = t(1 + t2
)−1/2y′′(t) =
(1 + t2
)−1/2 − t2 (1 + t2)−3/2
Pertanto, la (34) diviene:
y(t) = 1 +t2
2→ y(x) =
√1 +
(dy
dx
)2∼= 1 +
1
2
(dy
dx
)2
. (35)
Introducendo quanto trovato nella (32), si ottiene:
L =
∫ l
0
(1 +
1
2
(dy
dx
)2)dx; (36)
ricordando la (30) e svolgendo i conti, si arriva alla:
L = l +h2
2l+
1
24
g2l3
H2cos2α. (37)
Introducendo in quest’ultima, grazie alla (31), il termine f2, si perviene alla relazionecercata:
L = l +h2
2l+
8
3
f2
l. (38)
Per finire si possono determinare anche le altre grandezze di interesse sfruttando le equazionidi equilibrio dell’intero filo:
HA = HB = H VA = Hh
l+
g
cosα
l
2VB = H
h
l− g
cosα
l
2(39)
Quindi la tensione agli estremi nel filo può ricavarsi tramite le:
TA =√H2 + V 2
A TB =√H2 + V 2
B (40)
e dall’equilibrio di un tratto di filo lungo x risulta l’andamento della tensione nel filo intero:
T (x) = H√
1 + y′2 → T (x) = H
√1 +
64f2
l2
[(l
2− x)
+hl
8f
]. (41)

3.2 La parabola inestensibile 12
3.2.1 Un caso particolare: appoggi allo stesso livello
Quando gli appoggi si trovano allo stesso livello, α = 0; se inoltre vale ancora l’ipotesi percui la configurazione del filo è tale che il rapporto f/l tra freccia e luce è piccolo, si hay′(x) ∼= 0. In questo caso particolare il peso per unità di lunghezza è approssimabile conil peso per unità di proiezione orizzontale. L’equazione di equilibrio indefinito del filo, eq.(28), diviene ora:
Hd2y
dx2= −g (42)
Integrando due volte ed imponendo le condizioni al contorno, si ottiene l’equazione di unaparabola ad asse verticale:
y(x) =gx
2H(l − x) , (43)
la quale descrive punto per punto la deformata di un filo molto teso, sotto l’azione del pesoproprio, e con le imposte allo stesso livello. A questo punto, basta porre h = 0 e α = 0nelle equazioni ricavate al paragrafo precedente per determinare le espressioni relative alcaso in esame:
f =gl2
8H→ H =
gl2
8f. (44)
La lunghezza del filo è L =∫ l0 ds e, procedendo come in precedenza cioè sviluppando in
serie di Taylor la funzione integranda, si ottiene:
L = l
(1 +
8
3
(f
l
)2
− 32
5
(f
l
)4
+256
7
(f
l
)6
− 2560
11
(f
l
)8
+ . . .
)(45)
Tale sviluppo può essere arrestato ai primi due termini se la parabola è molto piatta, cioèse risulta:
f
l<<
1
10→ L = l
(1 +
8
3
(f
l
)2), (46)
ritrovando, come ci si aspettava, l’espressione della lunghezza della parabola tra due estremigenerici, imponendo h = 0 nell’eq. (38). Può essere utile a questo punto introdurrenell’espressione di y(x) il legame tra H ed f, per ottenere un’espressione più compatta:
y(x) = 4f
[(xl
)−(xl
)2]; (47)
ricordando la (41), si ottiene:
T (x) = H
√1 +
64f2
l4
(l
2− x)2
. (48)
La tensione massima si ha agli estremi (x = 0) e (x = l), dove vale:
TMax = H
√1 + 16
(f
l
)2
. (49)
3.3 Confronti fra catenaria e parabola 13
0 2 4 6 8 10 12 14
0
1
2
3
4
5
6
7
8
9
10
x [m]
y [m
]
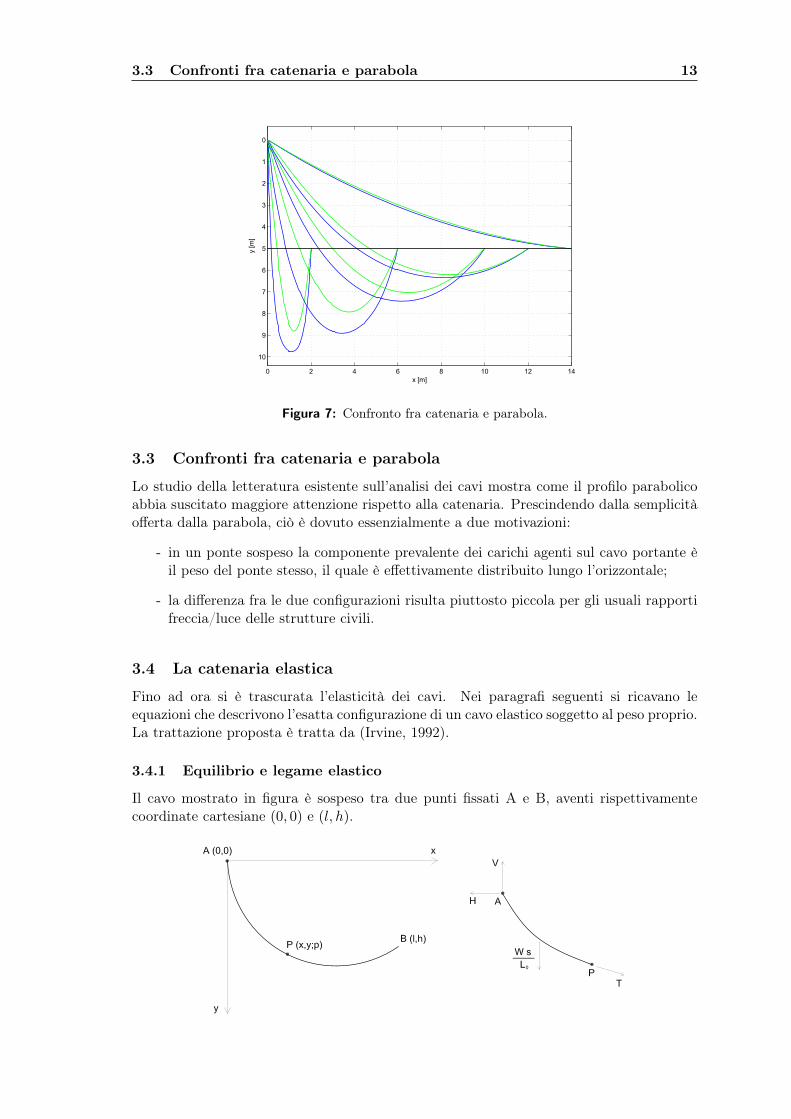
Figura 7: Confronto fra catenaria e parabola.
3.3 Confronti fra catenaria e parabola
Lo studio della letteratura esistente sull’analisi dei cavi mostra come il profilo parabolicoabbia suscitato maggiore attenzione rispetto alla catenaria. Prescindendo dalla semplicitàofferta dalla parabola, ciò è dovuto essenzialmente a due motivazioni:
- in un ponte sospeso la componente prevalente dei carichi agenti sul cavo portante èil peso del ponte stesso, il quale è effettivamente distribuito lungo l’orizzontale;
- la differenza fra le due configurazioni risulta piuttosto piccola per gli usuali rapportifreccia/luce delle strutture civili.
3.4 La catenaria elastica
Fino ad ora si è trascurata l’elasticità dei cavi. Nei paragrafi seguenti si ricavano leequazioni che descrivono l’esatta configurazione di un cavo elastico soggetto al peso proprio.La trattazione proposta è tratta da (Irvine, 1992).
3.4.1 Equilibrio e legame elastico
Il cavo mostrato in figura è sospeso tra due punti fissati A e B, aventi rispettivamentecoordinate cartesiane (0, 0) e (l, h).

3.4 La catenaria elastica 14
La lunghezza del cavo indeformato sia L0. Un punto del cavo abbia coordinata lagrangianas nella configurazione indeformata. Sotto l’azione del peso proprio W = mgL0, questopunto si sposta per occupare una nuova posizione nel profilo deformato descritto dallecoordinate cartesiane x e y e dalla coordinata lagrangiana p. La condizione di compatibilitàgeometrica si esprime come:(
dx
dp
)2
+
(dy
dp
)2
= 1. (50)
Imponendo l’equilibrio del tratto di filo indicato in figura si ottiene:
Tdx
dp= H (51a)
Tdz
dp= V − Ws
L0(51b)
dove, per la conservazione della massa, Ws/L0 è il peso del tratto di filo deformato. Lalegge di Hooke si scrive semplicemente:
T = EA0 · ε = EA0dp− dsds
= EA0
(dp
ds− 1
)(52)
dove E è il modulo di elasticità e A0 è l’area della sezione indeformata. Le condizioni,rispettivamente agli estremi A e B del cavo, sono:
- x=0, y=0, p=0, in A(s=0);
- x=l, y=h, p=L, in B(s = L0).
3.4.2 Le soluzioni parametriche
Basandosi sulle equazioni precedentemente introdotte, x, y e T possono essere espresse infunzione della coordinata lagrangiana s.
• T=T(s): elevando al quadrato le due equazioni (51), sommandole ed introducendolenella (50), si ottiene:
T (s) =
√H2 +
(V − Ws
L0
)2
(53)
• x=x(s): notando che dxds = dx
dpdpds , i cui termini possono essere rintracciati dall’e-
quazione di equilibrio e dalla (52) così riscritte
dx
dp=H
T
dp
ds= 1 +
T
EA0(54)
si ottiene:
dx
ds=
H
EA0 + H√H2+
(V−Ws
L0
)2 (55)
da cui, integrando con la posizione x=0, s=0, si giunge alla
x(s) =H
EA0s+
HL0
W
[sinh−1
(V
H
)− sinh−1
(V −Ws/L0
H
)](56)

3.5 Risposta per carichi concentrati 15
• y=y(s): utilizzando considerazioni analoghe, si perviene all’espressione
y(s) =Ws
EA0
(V
W− s
2L0
)+
+HL0
W
√1 +
(V
H
)2
−
√1 +
(V −Ws/L
H
)2 (57)
• imponendo le condizioni x = l, y = h, s = L0, si ottengono due equazioni in H e V:
l =HL0
EA0+HL0
W
[sinh−1
(V
H
)− sinh−1
(V −WH
)](58a)
h =WL0
EA0
(V
W− 1
2
)+HL0
W
√1 +
(V
H
)2
−
√1 +
(V −WH
)2 (58b)
La soluzione di questo sistema di equazioni in H e V fornisce la soluzione del problema, inquanto si ricostruiscono tutte le grandezze di interesse, x(s), y(s) e T (s), rispettivamentetramite le eq. (56), (57) e (53). Poichè le equazioni sono non lineari, per risolvere il sistema(58) è necessario un metodo iterativo quale il metodo di Newton-Raphson.
3.5 Risposta per carichi concentrati
3.5.1 Risposta ad un singolo carico concentrato
Si consideri ora il caso di un filo soggetto, oltre al proprio peso, anche ad un carico ver-ticale concentrato F1, agente in un punto P rappresentato dalla coordinata lagrangianas1, corrente nel cavo partendo dal supporto, (Irvine, 1992). L’impostazione utilizzata inprecedenza si mantiene valida, fatte salvo alcune considerazioni sull’equilibrio. L’equilibrioorizzontale, eq. (51a), non subisce nessuna modifica, mentre quello verticale, eq. (51b), vadiviso in due campi di studio, uno prima il carico F1, l’altro dopo, cioè:
Tdy
dp= V − Ws
L0per 0 ≤ s ≤ s1
Tdy
dp= V − F1 − Ws
L0per s1 ≤ s ≤ L0
(59)
Sarà pertanto necessario imporre la continuità del cavo in corrispondenza dell’applicazionedel carico, oltre alla condizione di compatibilità geometrica, eq. (50).Si risale alle seguenti espressioni:
• T=T(s):T (s) =
√H2 +
(V − Ws
L0
)2per 0 ≤ s ≤ s1
T (s) =
√H2 +
(V − F1 − Ws
L0
)2per s1 ≤ s ≤ L0
(60)
• x=x(s):
x(s) =H
EA0s+
HL0
W
[sinh−1
(V
H
)− sinh−1
(V −Ws/L0
H
)]per 0 ≤ s ≤ s1
x(s) =H
EA0s+
HL0
W
[sinh−1
(V
H
)− sinh−1
(V − F1 −Ws/L0
H
)]+
+HL0
W
[sinh−1
(V − F1 −Ws/L0
H
)− sinh−1
(V −Ws1/L0
H
)]per s1 ≤ s ≤ L0
(61)

3.5 Risposta per carichi concentrati 16
0 10 20 30 40 50 60 70
-20
-10
0
10
20
30
40
x [m]
y [m
]
F = 0 N
F = 20 N
F = 40 N
F = 60 N
d = 20 mmLo = 90 mE = 210 GPag = 800 N/m
(a) Evoluzione delle configurazioni.
0
10
20
30
40
50
60
70
0 0,3 0,6 0,9 1,2 1,5 1,8 2,1 2,4 2,7 3
y [m] spostamento
Car
ico
vert
ical
e
(b) Incrementi di carico e relativi abbassamenti.
Figura 8: Aumento progressivo di un carico verticale concentrato.

3.5 Risposta per carichi concentrati 17
• y=y(s):
y(s) =Ws
EA0
(V
W− s
2L0
)+
+HL0
W
√1 +
(V
H
)2
−
√1 +
(V −Ws/L
H
)2
per 0 ≤ s ≤ s1
y(s) =Ws
EA0
(V
W− s
2L0
)+
+HL0
W
√1 +
(V
H
)2
−
√1 +
(V − F1 −Ws/L0
H
)2+
+HL0
W
[F1
H
W
EA0
(s1L0− s
L0
)]+
+HL0
W
√1 +
(V − F1 −Ws1/L0
H
)2
−
√1 +
(V −Ws1/L0
H
)2
per s1 ≤ s ≤ L0
(62)
A questo punto, le equazioni per ricavare H e V possono essere ottenute ponendo x = l,z = l e s = L0 nelle seconde delle (61) e (62). Si perviene così ad un sistema di equazioninon lineare che presenta le stesse difficoltà computazionali di quello della catenaria elastica,eq. (58).
Si riportano in Fig. 8(a) le configurazioni assunte da un cavo pesante soggetto ad uncarico verticale progressivamente crescente, con incremento di carico pari a 20N, applicatoa s1 = 30m.
L’effetto della non linearità geometrica della risposta è facilmente individuabile: l’in-cremento di spostamento in corrispondenza del punto di applicazione di F fra uno stepdi carico e l’altro, infatti, diminuisce. Questa non linearità è solamente geometrica edè direttamente attribuibile all’equazione (50). Diagrammando l’incremento di carico infunzione degli incrementi di spostamenti, a partire dalla configurazione assunta sotto ilsolo peso proprio, si ottiene l’andamento in Fig. 8(b), che mostra il tipico comportamentotensoirrigidente di una fune.
3.5.2 Risposta ad un sistema di carichi concentrati
I risultati ricavati per il caso di un singolo carico verticale concentrato possono esserenaturalmente estesi al caso generale di N carichi concentrati Fn. Si mantiene la stessacoordinata lagrangiana s, indicante la distanza di un punto nel profilo indeformato dal-l’origine degli assi. L’equazione di equilibrio in direzione orizzontale si conserva poichénon ci sono, per ipotesi, carichi in direzione orizzontale; l’equilibrio in direzione verticaleè invece definito a tratti tra due punti successivi di applicazione dei carichi, Pn e Pn+1,rispettivamente di coordinate sn e sn+1:
Vdy
dp= V −
n∑i=0
Fi −Ws
L0con sn ≤ s ≤ sn+1 (63)
Definendo F0 = 0, quando il numero totale di carichi è nullo (N = 0), si ricade nel casodel cavo soggetto al solo peso proprio.
Si mantengono le usuali ipotesi di calcolo che prevedono deformazioni infinitesime elegame elastico lineare; anche le condizioni al contorno sono le medesime a quelle utilizzate

3.5 Risposta per carichi concentrati 18
in precedenza. In aggiunta a queste ultime, per garantire la continuità del filo, si rendenecessario imporre delle condizioni anche in corrispondenza dei punti di applicazione deicarichi:
x−n = x+n , y−n = y+n , p−n = p+n quando s = sn, (64)
dove n = 1, 2, . . . , N e x−n = lime→0 x (sn − e), e > 0 e analogamente per x+n , y−n , p+n .La soluzione del problema prevede a questo punto la determinazione delle espressioni
analitiche per T, x, y, p e A, con particolare interesse soprattutto per le prime tre, infunzione della variabile lagrangiana s. La tensione è:
T (s) =
√√√√(V − n∑i=0
Fi −Ws
L0
)2
+X2
con sn ≤ s ≤ sn+1; n = 0, 1, . . . , N e s0 = 0.
(65)
Nel determinare la coordinata orizzontale del profilo deformato x = x(s), è necessario,come detto, imporre non solo le condizioni agli estremi, ma anche in corrispondenza deipunti Pn, per cui è necessario ricavare delle costanti di integrazione. Di conseguenza, lafunzione x = x(s), sarà definita, a differenza della tensione, anche nei punti di applicazionedei carichi; per contro l’espressione analitica si complica ed è quindi conveniente introdurredelle adimensionalizzazioni che permettano di scrivere in forma più compatta le equazioniche verranno ricavate. Si pone:
ξ = x/L0 coordinata orizzontale;η = y/L0 coordinata verticale;σ = s/L0 coordinata lagrangiana del profilo indeformato;σn = sn/L0 coordinata lagrangiana dell’n-esimo carico
n = 1, 2, . . . , N ;δ = h/L0 dislivello verticale adimensionalizzato;γ = l/L0 luce orizzontale adimensionalizzata;τ = T/W tensione adimensionalizzata;χ = H/W reazione orizzontale in corrispondenza degli estremi
P0 e PN+1;φ = V/W reazione verticale in corrispondenza dell’estremo P0;ψn = Fn/W carichi concentrati verticali n = 1, 2, . . . , N ;β = W/ (EA0) coefficiente di flessibilità;Ψn =
∑nj=−1 φj somma parziale dei carichi concentrati.
Ricordando che s0 = 0, per utilizzare le adimensionalizzazioni presentate, bisogna ancheporre:
σ0 = 0, F−1 = 0, F0 = 0 → ψ−1 = 0, ψ0 = 0 → Ψ−1 = 0,Ψ0 = 0. (66)
Si ricavano:
τ(σ) =√χ2 + (φ−Ψn − σ)
con sn ≤ s ≤ sn+1; n = 0, 1, . . . , N(67)
ξ(σ) = χ
[βσ + sinh−1
(φ
χ
)− sinh−1
(φ−Ψn − σ
χ
)]+
+ χ
[n∑i=0
sinh−1(φ−Ψi − σi
χ
)− sinh−1
(φ−Ψi−1 − σi
χ
)]con σn ≤ σ ≤ σn+1; n = 0, 1, . . . , N
(68)

3.5 Risposta per carichi concentrati 19
η(σ) = βσ(φ− σ
2
)+√φ2 + χ2 −
√χ2 + (φ−Ψn − σ)2+
+
n∑i=0
[βψi (σi − σ) +
√χ2 + (φ−Ψi − σi)2 −
√χ2 + (φ−Ψi−1 − σi)2
]con σn ≤ σ ≤ σn+1; n = 0, 1, . . . , N
(69)
Si riportano i risultati ottenuti inerenti ad un cavo senza peso avente lunghezza inizialeL0 = 100m al quale sono applicati quattro carichi concentrati di intensità pari a 10 kN,posizionati rispettivamente a 20 40 60 80 m lungo la lunghezza del cavo. In Fig. 9(a) è statatracciata la deformata, rappresentante la funicolare dei carichi, il tracciato con il più altorendimento strutturale. La Fig. 9(b) mostra invece l’andamento della tensione, illustrandochiaramente come ogni sottodominio di cavo si trovi a lavorare come una biella tesa.

3.5 Risposta per carichi concentrati 20
0 10 20 30 40 50 60 70 80 90
-20
-10
0
10
20
30
40
x [m]
y [m
]
10 kN
10 kN 10 kN
10 kN
d = 20 mm Lo = 100 m E = 210 GPa g = 0 N/m
(a) Deformata.
0 10 20 30 40 50 60 70 80 9027
28
29
30
31
32
33
34
35
x [m]
T [k
N]
(b) Tensione.
Figura 9: Risposta del cavo elastico a più carichi concentrati.
4 Rigidezza di un filo teso 21
4 Rigidezza di un filo teso
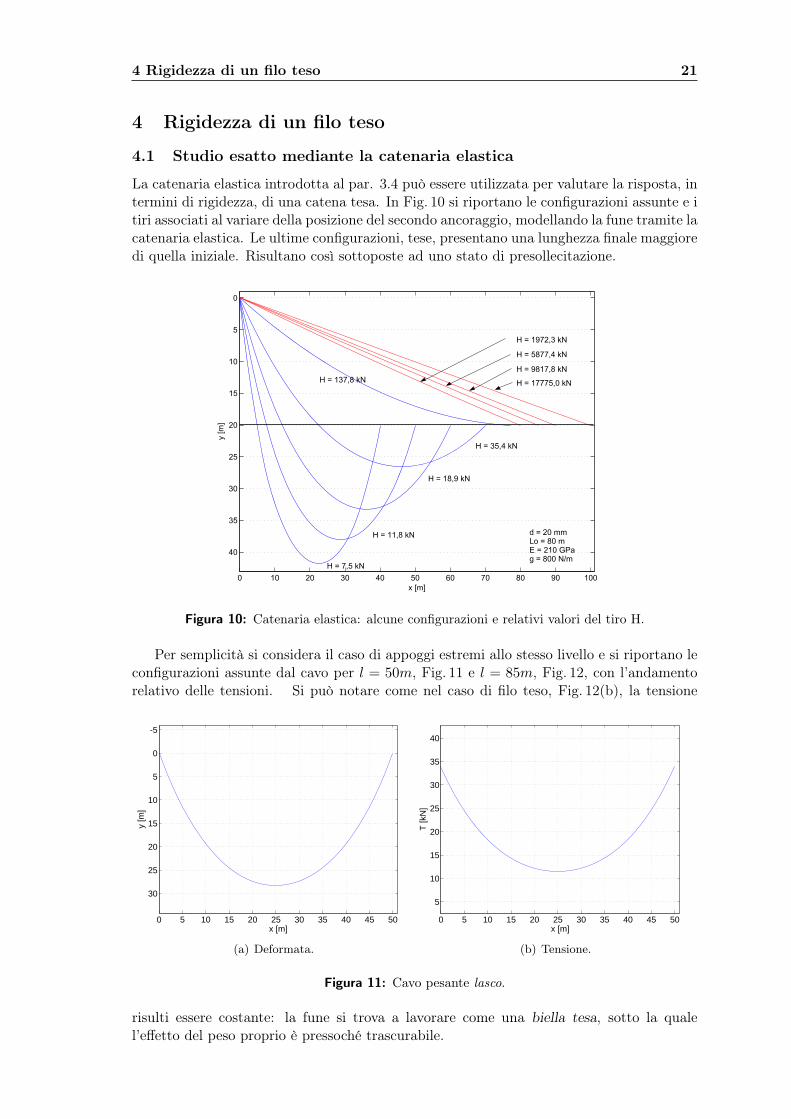
4.1 Studio esatto mediante la catenaria elastica
La catenaria elastica introdotta al par. 3.4 può essere utilizzata per valutare la risposta, intermini di rigidezza, di una catena tesa. In Fig. 10 si riportano le configurazioni assunte e itiri associati al variare della posizione del secondo ancoraggio, modellando la fune tramite lacatenaria elastica. Le ultime configurazioni, tese, presentano una lunghezza finale maggioredi quella iniziale. Risultano così sottoposte ad uno stato di presollecitazione.
0 10 20 30 40 50 60 70 80 90 100
0
5
10
15
20
25
30
35
40
x [m]
y [m
]
H = 7,5 kN
H = 11,8 kN
H = 18,9 kN
H = 35,4 kN
H = 137,8 kN
H = 1972,3 kN
H = 5877,4 kN
H = 9817,8 kN
H = 17775,0 kN
d = 20 mmLo = 80 mE = 210 GPa g = 800 N/m
Figura 10: Catenaria elastica: alcune configurazioni e relativi valori del tiro H.
Per semplicità si considera il caso di appoggi estremi allo stesso livello e si riportano leconfigurazioni assunte dal cavo per l = 50m, Fig. 11 e l = 85m, Fig. 12, con l’andamentorelativo delle tensioni. Si può notare come nel caso di filo teso, Fig. 12(b), la tensione
0 5 10 15 20 25 30 35 40 45 50
-5
0
5
10
15
20
25
30
x [m]
y [m
]
(a) Deformata.
0 5 10 15 20 25 30 35 40 45 50
5
10
15
20
25
30
35
40
x [m]
T [k
N]
(b) Tensione.
Figura 11: Cavo pesante lasco.
risulti essere costante: la fune si trova a lavorare come una biella tesa, sotto la qualel’effetto del peso proprio è pressoché trascurabile.

4.2 Il Modulo di elasticità apparente 22
0 10 20 30 40 50 60 70 80 85
-30
-20
-10
0
10
20
30
x [m]
y [m
]
(a) Deformata.
0 10 20 30 40 50 60 70 80 85
4100
4110
4120
4130
4140
4150
x [m]
T [k
N]
(b) Tensione.
Figura 12: Cavo pesante teso.
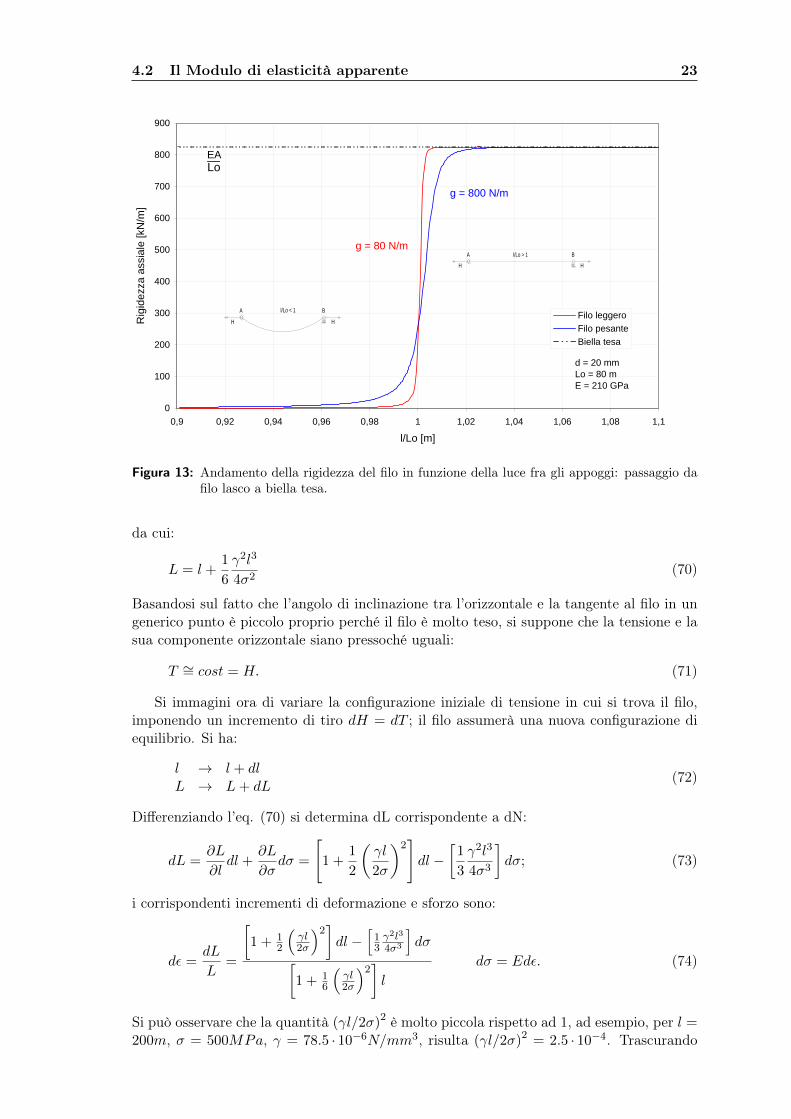
Inoltre è possibile diagrammare la rigidezza del filo in funzione del rapporto tra cordal e lunghezza iniziale L0 e ottenere le curve mostrate in Fig. 13. Una curva è riferita ad unfilo leggero (g = 80 N/m), l’altra ad un filo pesante (g = 800 N/m). Si può osservare chequando l/L0 < 1, la rigidezza del filo è bassa e la componente orizzontale di trazione Hcontrasta principalmente l’effetto del peso proprio. All’aumentare di tale rapporto la funetende ad assumere una configurazione rettilinea.
Il risultato importante si desume osservando cosa accade alla rigidezza della fune: perle configurazioni lasche tale rigidezza è trascurabile mentre per le configurazioni tese larigidezza tende a quella di una biella di pari area e modulo elastico.
Al fine di mettere in opera un elemento che rispetti questi requisiti è necessario ricorrerea tecniche di pretensione oppure calcolare a priori, in fase progettuale, la lunghezza indefor-mata da attribuire allo strallo affinchè, in seguito all’applicazione dei carichi, questo assumala configurazione di progetto esercitando sull’impalcato l’adeguato sistema di sospensione.
Questi semplici concetti hanno sancito il severo insuccesso dei primi ponti strallati,(Malerba, 2005). Gli stralli erano inizialmente realizzati tramite catene, elementi piut-tosto pesanti. Lo sviluppo della massima rigidezza poteva avvenire solo per alti valori ditensione, ma tali valori erano fisicamente irraggiungibili in quanto anticipati dalla rotturadell’elemento strutturale. I primi ponti strallati risultavano così supportati a tutti gli effettida fune lasche e questo portò a numerosi crolli, al tempo inspiegabili.
Sebbene le equazioni risolventi della catenaria elastica fossero già note verso la finedell’800 (Tab. 1), una loro risoluzione non si presentava agevole. Storicamente pertantonon si è arrivati alle conclusioni di cui sopra passando per la formulazione analitica esattadi Fig, 13, ma attraverso il concetto di modulo elastico equivalente che, introdotto daDischinger nel 1949, ha reso possibile la piena comprensione, a 300 anni da Huygens,Liebniz e Bernoulli, del comportamento meccanico di una fune, aprendo così la strada perlo sviluppo dei ponti strallati di moderna concezione.
4.2 Il Modulo di elasticità apparente
Ci si riferisce, come preannunciato, al caso particolare di cavi molto tesi e con gli estremifissati allo stesso livello,(Dischinger, 1949), (Hernst, 1965),(De Miranda et al., 1979). Intro-ducendo il peso specifico del materiale g e la tensione di esercizio σ, è possibile riscrivere larelazione ricavata in precedenza per la lunghezza L del cavo, eq. (46), nel modo seguente:
L = l
[1 +
8
3
(f
l
)2]
= l
[1 +
8
3
1
l2g2l4
64H2
]= l
[1 +
1
6
(γ ·A · l2σ ·A
)2],
4.2 Il Modulo di elasticità apparente 23
0
100
200
300
400
500
600
700
800
900
0,9 0,92 0,94 0,96 0,98 1 1,02 1,04 1,06 1,08 1,1
l/Lo [m]
Rig
idez
za a
ssia
le [k
N/m
]
Filo leggeroFilo pesanteBiella tesa
H H
A Bl/Lo > 1
d = 20 mmLo = 80 mE = 210 GPa
g = 800 N/m
g = 80 N/m
EA
H H
A Bl/Lo < 1
__Lo
Figura 13: Andamento della rigidezza del filo in funzione della luce fra gli appoggi: passaggio dafilo lasco a biella tesa.
da cui:
L = l +1
6
γ2l3
4σ2(70)
Basandosi sul fatto che l’angolo di inclinazione tra l’orizzontale e la tangente al filo in ungenerico punto è piccolo proprio perché il filo è molto teso, si suppone che la tensione e lasua componente orizzontale siano pressoché uguali:
T ∼= cost = H. (71)
Si immagini ora di variare la configurazione iniziale di tensione in cui si trova il filo,imponendo un incremento di tiro dH = dT ; il filo assumerà una nuova configurazione diequilibrio. Si ha:
l → l + dlL → L+ dL
(72)
Differenziando l’eq. (70) si determina dL corrispondente a dN:
dL =∂L
∂ldl +
∂L
∂σdσ =
[1 +
1
2
(γl
2σ
)2]dl −
[1
3
γ2l3
4σ3
]dσ; (73)
i corrispondenti incrementi di deformazione e sforzo sono:
dε =dL
L=
[1 + 1
2
(γl2σ
)2]dl −
[13γ2l3
4σ3
]dσ[
1 + 16
(γl2σ
)2]l
dσ = Edε. (74)
Si può osservare che la quantità (γl/2σ)2 è molto piccola rispetto ad 1, ad esempio, per l =200m, σ = 500MPa, γ = 78.5 · 10−6N/mm3, risulta (γl/2σ)2 = 2.5 · 10−4. Trascurando
4.2 Il Modulo di elasticità apparente 24
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0 100 200 300 400 500 600
Lunghezza del cavo [m]
Rap
port
o E*
/E
σ = 200 N/mm^2 σ = 400 N/mm^2σ = 600 N/mm^2σ = 800 N/mm^2
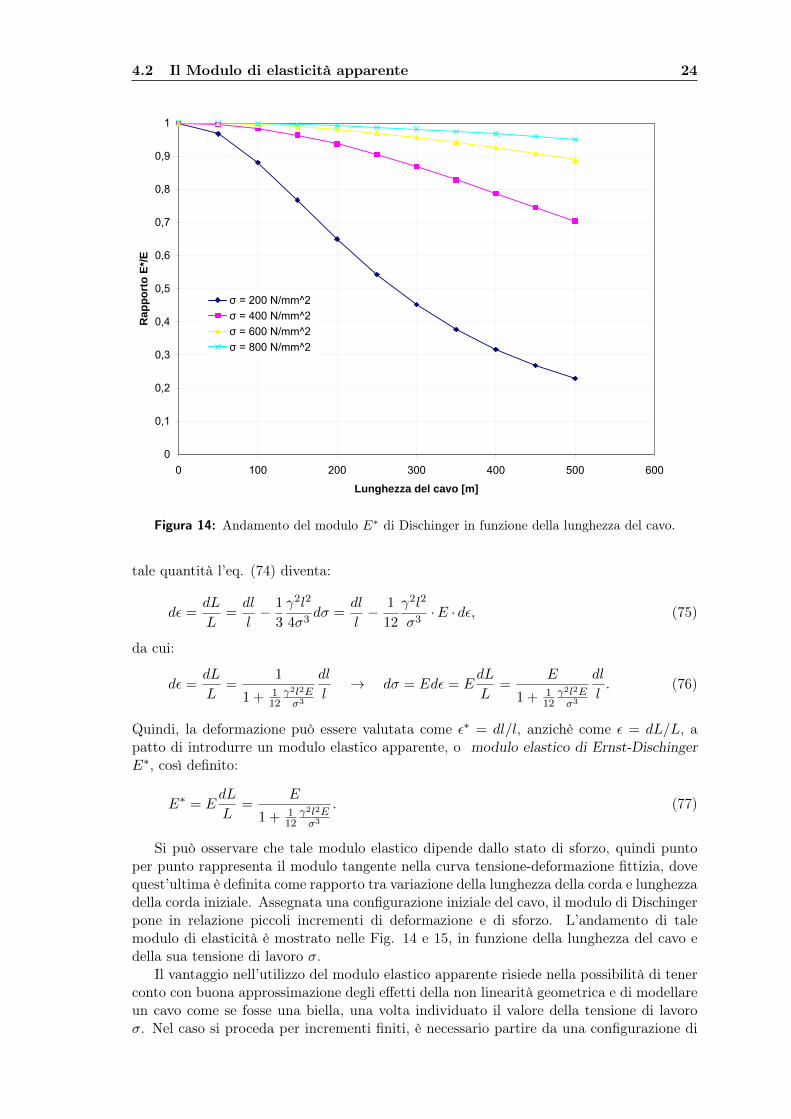
Figura 14: Andamento del modulo E∗ di Dischinger in funzione della lunghezza del cavo.
tale quantità l’eq. (74) diventa:
dε =dL
L=dl
l− 1
3
γ2l2
4σ3dσ =
dl
l− 1
12
γ2l2
σ3·E · dε, (75)
da cui:
dε =dL
L=
1
1 + 112γ2l2Eσ3
dl
l→ dσ = Edε = E
dL
L=
E
1 + 112γ2l2Eσ3
dl
l. (76)
Quindi, la deformazione può essere valutata come ε∗ = dl/l, anzichè come ε = dL/L, apatto di introdurre un modulo elastico apparente, o modulo elastico di Ernst-DischingerE∗, così definito:
E∗ = EdL
L=
E
1 + 112γ2l2Eσ3
. (77)
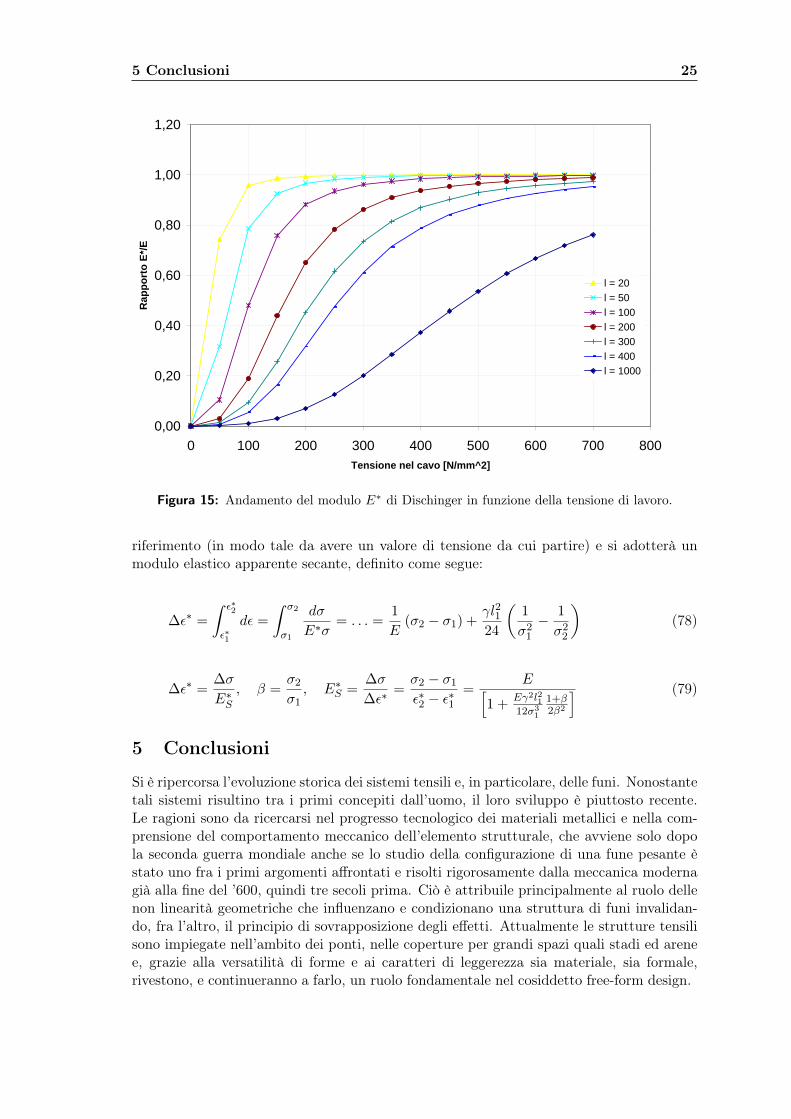
Si può osservare che tale modulo elastico dipende dallo stato di sforzo, quindi puntoper punto rappresenta il modulo tangente nella curva tensione-deformazione fittizia, dovequest’ultima è definita come rapporto tra variazione della lunghezza della corda e lunghezzadella corda iniziale. Assegnata una configurazione iniziale del cavo, il modulo di Dischingerpone in relazione piccoli incrementi di deformazione e di sforzo. L’andamento di talemodulo di elasticità è mostrato nelle Fig. 14 e 15, in funzione della lunghezza del cavo edella sua tensione di lavoro σ.
Il vantaggio nell’utilizzo del modulo elastico apparente risiede nella possibilità di tenerconto con buona approssimazione degli effetti della non linearità geometrica e di modellareun cavo come se fosse una biella, una volta individuato il valore della tensione di lavoroσ. Nel caso si proceda per incrementi finiti, è necessario partire da una configurazione di
5 Conclusioni 25
0,00
0,20
0,40
0,60
0,80
1,00
1,20
0 100 200 300 400 500 600 700 800Tensione nel cavo [N/mm^2]
Rap
port
o E*
/E
l = 20l = 50l = 100l = 200l = 300l = 400l = 1000
Figura 15: Andamento del modulo E∗ di Dischinger in funzione della tensione di lavoro.
riferimento (in modo tale da avere un valore di tensione da cui partire) e si adotterà unmodulo elastico apparente secante, definito come segue:
∆ε∗ =
∫ ε∗2
ε∗1
dε =
∫ σ2
σ1
dσ
E∗σ= . . . =
1
E(σ2 − σ1) +
γl2124
(1
σ21− 1
σ22
)(78)
∆ε∗ =∆σ
E∗S, β =
σ2σ1, E∗S =
∆σ
∆ε∗=σ2 − σ1ε∗2 − ε∗1
=E[
1 +Eγ2l2112σ3
1
1+β2β2
] (79)
5 Conclusioni
Si è ripercorsa l’evoluzione storica dei sistemi tensili e, in particolare, delle funi. Nonostantetali sistemi risultino tra i primi concepiti dall’uomo, il loro sviluppo è piuttosto recente.Le ragioni sono da ricercarsi nel progresso tecnologico dei materiali metallici e nella com-prensione del comportamento meccanico dell’elemento strutturale, che avviene solo dopola seconda guerra mondiale anche se lo studio della configurazione di una fune pesante èstato uno fra i primi argomenti affrontati e risolti rigorosamente dalla meccanica modernagià alla fine del ’600, quindi tre secoli prima. Ciò è attribuile principalmente al ruolo dellenon linearità geometriche che influenzano e condizionano una struttura di funi invalidan-do, fra l’altro, il principio di sovrapposizione degli effetti. Attualmente le strutture tensilisono impiegate nell’ambito dei ponti, nelle coperture per grandi spazi quali stadi ed arenee, grazie alla versatilità di forme e ai caratteri di leggerezza sia materiale, sia formale,rivestono, e continueranno a farlo, un ruolo fondamentale nel cosiddetto free-form design.

BIBLIOGRAFIA 26
Bibliografia
Belluzzi, O. (1969), Scienza delle costruzioni, vol. I, II e III, Zanichelli, Bologna.
Benvenuto, E. (1981), La scienza delle costruzioni e il suo sviluppo storico, ManualiSansoni.
De Miranda, F. (1980), Ponti strallati di grande luce, Ed. Scientifiche A. Cremonese,Roma.
De Miranda, F., Grimaldi, A., Maceri, F. e Como, M. (1979), «Basic problems inlong-span cable-stayed bridges», Dep. of Structures, Univ. of Calabria, Report, vol. 25.
Dischinger, F. (1949), «Hangebrucken fur schwerste Verkehrslasten (I), inBauingenieur», Marz.
Hernst, H. (1965), «Der E-Modul von Seilen unter Brucksichtigung des Durchhangers»,Der Bauingenieur, vol. 40 (2), p. 52–55.
Irvine, H. M. (1992), Cable structures, Dover Publications, New York.
Krishna, P. (1978), Cable-suspended roofs, McGraw-Hill, New York.
Leonard, J. W. (1988), Tension structures, McGraw-Hill, New York.
Lewis, W. (2003), Tension structures: form and behaviour, Thomas Telford.
Maier, G. (1963), «Sulla statica delle tensostrutture a ruota», Rendiconti dell’IstitutoLombardo, vol. 97.
Majowiecki, M. (1994), Tensostrutture: progetto e verifica, Consorzio Crea.
Malerba, P. (2005), «I ponti strallati. Il contributo di Francesco Martinez Y Cabrera»,Politecnico di Milano, P.za L. da Vinci, Milano, Italy.
Malerba, P. (2010), «Appunti del corso di Ponti», Politecnico di Milano, Dipartimentodi Ingegneria Strutturale.
Otto, F. e Drew, P. (1976), Form and structure, Verlag Gerd Hatje, Stuttgart.
Otto, F. e Rasch, B. (1995), Finding Form, Edition Axel Menges, Stuttgart.
Otto, F. e Schleyer, K. (1969), Tensile structures, Vol 2: cable structures, MIT Press,Cambridge.
Sacchi, G. (1999), «Appunti del corso di Scienza delle costruzioni II», Politecnico diMilano, Dipartimento di Ingegneria Strutturale.