student final year project declaration - city u
TRANSCRIPT

Department of Electronic Engineering
FINAL YEAR PROJECT REPORT
BEngCE-2008/09-KLC-03
Human Motion Analysis
Student Name: Chu Kwong Wai Student ID: Supervisor: Dr. CHAN, K L Assessor: Dr. CHAN, Stanley C F
Bachelor of Engineering (Honours) in Computer Engineering

Student Final Year Project Declaration
I have read the student handbook and I understand the meaning of academic dishonesty, in particular plagiarism and collusion. I declare that the work submitted for the final year project does not involve academic dishonesty. I give permission for my final year project work to be electronically scanned and if found to involve academic dishonesty, I am aware of the consequences as stated in the Student Handbook. Project Title : Human Motion Analysis
Student Name : Chu Kwong Wai
Student ID:
Signature
Date : 23-Apr-09
No part of this report may be reproduced, stored in a retrieval system, or transcribed in any form or by any means – electronic, mechanical, photocopying, recording or otherwise – without the prior written permission of City University of Hong Kong.

i
Table of Contents:
List of Figures……………………………………………. iii
Abstract…………………………………………………… v
Chapter 1 Introduction………………………………… 1
1.1 Background………………………………………………… 1
1.2 Objectives………………………………………………….. 3
1.3 Challenges Faced………………………………………….. 3
1.4 Chapter Outline……………………………………………. 5
Chapter 2 Related Work………………………………… 6
2.1 Background Subtraction…………………………………… 6
2.2 Skeletonization…………………………………………….. 6
2.3 Motion Tracking…………………………………………… 7
Chapter 3 Methodology………………………………… 9
3.1 System Overview………………………………………….. 9
3.2 Background Subtraction Module………………………….. 11
3.2.1 Background Modeling…………………………… 11
3.2.2 K-means Algorithm……………………………… 13
3.2.3 Foreground Detection……………………………. 14
3.2.4 Median Filter…………………………………….. 16

ii
3.3 Analysis Module…………………………………………. 18
3.3.1 Dilation Operation……………………................. 18
3.3.2 Erosion Operation………………………………. 21
3.3.3 Boundary Extraction……………………………. 23
3.3.4 Removing the Non-body Objects………………. 25
3.3.5 Extracting Extremal Points……………………... 28
3.3.6 Locating Interested Points……………………… 30
3.4 Tracking Module………………………………………… 33
Chapter 4 Result……………………………………... 35
4.1 System Configuration……………………………………… 35
4.2 Background Subtraction……………………………………. 36
4.3 Median Filter………………………………………………... 39
4.4 Morphological Operations………………………………….. 40
4.5 Locating Interested Points…………………………………... 42
4.6 Tracking Process…………………………………………….. 43
4.6.1 Result of Kalman Filter……………………………… 43
4.6.2 Object Tracking………………………………………. 45
Chapter 5 Discussion…………………………………… 47
Chapter 6 Conclusion…………………………………... 50
Reference…………………………………………………… 51

iii
List of Figures
Figure 1. Flow chart of human motion analysis system……………………… 9
Figure 2. Demonstration of a region based background modeling process….. 11
Figure 3. Modeling composite background………………………………….. 12
Figure 4. Flow chart of the K-means algorithm employed………………….. 13
Figure 5. Histogram of an image block with two background regions……… 14
Figure 6. Results of background subtraction & median filtering…………… 16
Figure 7. Calculating the median value of a pixel neighborhood………….. . 17
Figure 8. Result of dilation operation………………………………………. 19
Figure 9. 8-connected neighborhood……………………………………….. 20
Figure 10. Illustration of dilation operation………………………………… 20
Figure 11. Result of erosion operation……………………………………… 22
Figure 12. Illustration of erosion operation…………………………………. 22
Figure 13. Result of boundary extraction…………………………………… 23
Figure 14. Illustration of boundary extraction operation…………………… 24
Figure 15. Removal of non-body objects…………………………………… 25
Figure 16. Connected component labeling………………………………...... 27
Figure 17. Process of extracting extremal points……………………………. 28
Figure 18. Interested points located…………………………………………. 30
Figure 19. Locating elbow position……………………………………….... 31
Figure 20. Locating shoulder position………………………………………. 32
Figure 21. Illustration of Kalman filter……………………………………… 33
Figure 22. Results of background subtraction……………………………..... 36
Figure 23. Comparison between frame difference & region-based approach.. 37
Figure 24. Median filtering…………………………………………………... 39

iv
Figure 25. Two sets of results of morphological operations…………………. 41
Figure 26. Located interested points…………………………………………. 42
Figure 27. An unsuccessful case on locating interested points………………. 42
Figure 28. Result of tracking of the centroid of swimmer…………………… 43
Figure 29. Applying Kalman filter on tracking interested points…………….. 44
Figure 30. Object tracking……………………………………………………. 45

v
Abstract
This project aims to analyze human motion in an image sequence of swimming. The
proposed system consists of three main modules. First, a background subtraction
module segments the human region in spite of large scene variations in the monitored
pool areas. Second, the analysis module obtains the skeletonization of the segmented
region of human. Finally, a tracking module is used to acquire the trajectories of the
body parts. The background subtraction module employs a region-based background
modeling approach that can differentiate the moving human subject from the
nonstationary water surface. The skeletonization is obtained by locating the interested
points such as hands, elbows and shoulders of the human. The tracking module
utilizes the Kalman filter to find the position of the human body and the trajectories of
the body parts. We test the human motion analysis system using video clips of
breaststroke swimming. The experimental results are very good.

- 1 -
Chapter 1 Introduction
1.1 Background
Human motion analysis has been an active research topic in computer vision for
decades. This research topic aims at developing a system which can understand
human activities; such system would be an essential part of many applications such as
human-robot interaction, sports video analysis and visual surveillance. For instance,
human motion analysis enables a robot to understand the motion of human, which is
very important for having an effective communication between robot and human.
Triesch and von der Malsburg [1] proposed a mechanism for implementing a gesture
interface for human-robot interaction, which enables a robot to understand simple
gesture commands from human such as grasping and moving objects. It is believable
that more natural and intelligent communication between human and robot could be
achieved in the future. In the application of sports, human motion analysis system can
segment different parts of the human body, track the trajectories of various joints over
an image sequence, and reconstruct the 3-D human body structure. Those are
particular useful information for the coaches to analyze the performance of athletes,
and study the motions which cause injuries. Human motion analysis system is also

- 2 -
often seen in the automatic visual surveillance, which aims to perform monitoring
tasks automatically in order to improve the safety in different environment. For
example, [2] provides commercial products of automatic video surveillance system,
which can detect, record and transmit various kinds of motion activity. Besides, Eng
et al. [3] developed a live visual surveillance system for detecting early drowning at
swimming pool, which is definitely able to increase the quality of work of the
lifeguards.
Human motion analysis is the preprocessing step of human motion recognition,
because before any recognition process could be performed on the human body, a
variety of information of the body part must be obtained by the human motion
analysis process. Traditionally, the work of human motion analysis could be divided
into the following parts: 1) segmenting the human body part from video frames using
background subtraction approach, which usually need to build up a background model;
2) locating some interested joints on the human body part, which often makes use of
prior information or employs 2D or 3D human model; 3) tracking the movement of
the human body, which relies on the correspondence of image features between
consecutive video frames with the information of human body part’s position, shape
and velocity.

- 3 -
1.2 Objectives
In this report we address the problem of developing a system for analyzing and
tracking the motion of swimmers at the pool. The final year project has the following
the objectives:
˙Obtain the body part region of the swimmer from an image sequence of a
swimming video.
˙Locate some interested points on the upper parts of the human body.
˙Track the human body along the image sequence in order to get the
trajectories of swimmer.
1.3 Challenges Faced
One key challenge we faced during the project development is the relatively high
level of noise in human body part segmentation. It is because performing background
subtraction on video of an aquatic environment is much more complex than doing that
on video of the terrestrial scene. In the aquatic environment, the water surface is keep
fluctuating, which contributes to a non-stationary background for the background
subtraction process. The intensity variation of pixels at the scene over time is in a very
wide distribution, which is demonstrated in Figure 1 of [4]. The background
subtraction could not be done with traditional frame difference approach, which

- 4 -
differentiates the foreground objects from background based on the intensity
difference of pixels in the foreground and background images. In our system, we use a
region-based approach for the background subtraction, which would be less sensitive
to the wide intensity change over video frames. Further discussion would be provided
in the methodology chapter.
Apart from the above problem in background subtraction, there are also problems
existing in locating features and tracking. Some feature points such as the hands will
be relatively easier to locate since they are the most outstanding part of the body. By
locating the extremal points on the boundary of the human body can successfully
locate the hands position, which will be discussed in the methodology chapter.
Nevertheless, the other feature points such as shoulders and elbows will be much
more difficult to locate since they have not apparent characteristic like the hands.
Sometimes those feature points will be covered by the water or cannot be
differentiated from the body part, which makes the locating process even harder.
Using a predefined ratio between those feature points can help the locating process
and that will be discussed in the methodology chapter.
For the tracking process, the major problem is that sometimes the measurement data
- 5 -
will be missing due to the background subtraction process, which will affect the
tracking performance. A discussion about this issue will be provided in the result of
the tracking process in the result chapter.
1.4 Chapter Outline
This report is organized as follow. In Chapter 2, we review relevant prior works on
human motion analysis, which mainly focuses on background subtraction,
skeletonization of the extracted human region and motion tracking. Chapter 3 gives a
detailed explanation on the methodologies employed for the analysis system. In
chapter 4, experiment results of each stage of the human motion analysis are provided.
Finally, discussion and conclusion are presented in chapter 5 and 6 respectively.

- 6 -
Chapter 2 Related Work
2.1 Background Subtraction
In order to handle the highly dynamic aquatic background, Eng et al. [4] proposed a
homogeneous region-based modeling approach for background subtraction. This
approach takes the background as a composition of homogeneous region processes. A
sequence of background frames is needed to form the homogeneous background
region. For each of these background frames, it would be first divided into a number
of non-overlapping square blocks. Then, a hierarchical K-means algorithm is
performed on color vectors collected from these divided square blocks to form
homogeneous regions. This approach enables an efficient spatial searching scheme
with long-range spatial displacement search ability to capture the background pixels
movements. However, an additional devised thresholding scheme is needed in the
foreground detection process in order to have efficient result.
2.2 Skeletonization
Fujiyoshi and Lipton [5] proposed a real-time, robust and computational cheap
approach to get a “star” skeleton of a human target. This approach first detects
moving targets and extracts their boundaries. Each skeleton is obtained by detecting

- 7 -
and extracting the extremal points on the boundary of the segmented target object.
The “star” skeleton has only the extremals of the target object jointed to its centroid
point. The “star” skeleton can be used to determine the body posture and cyclic
motion of body segments, which are useful cues for analyzing human activities such
as walking and running. Since this approach is not iterative, so it is computational
inexpensive. It also provides a mechanism for controlling scale sensitivity.
Nevertheless, it does not rely on any priori human model; therefore it is very useful
for real-time application. However, this “star” skeleton consists of only the extremal
points such as hands, legs and the head of human body. Individual joints like elbows,
shoulders, ankles and knees can not be determined. Therefore, we proposed a new
approach to locate some interested points on the upper parts of the human body,
including hands, elbows and shoulders. Details are provided in the chapter of
methodology.
2.3 Motion Tracking
In the work of [6], a discrete Kalman filter is adopted for tracking human walking
motion. The five major equations of Kalman filter are divided into two groups: time
update equations and measurement update equations. The time update equations can
predict the current state and error covariance, and the measurement update equations

- 8 -
can correct the current state and error covariance predicted from these time update
equations. Similar approach is adopted in this project. Further explanation of the
Kalman filter would be provided in the methodology chapter. Chan [6] assumed that
the human subject walks at a constant velocity and the major results are obtained
based on this assumption. A discussion on the case that the human subject walks at
non-constant velocity is also provided. Apart from tracking the global position of the
human subject, 8 joints of the body are also tracked. Those include left shoulder, left
elbow, left hip, left knee, right shoulder, right elbow, right hip and right knee. A
similarity matching scheme is used to measure the performance of tracking system.
Most of the time the tracking system can have a good performance on tracking the
human subject, especially on tracking the global position movement of the human
object. However, the performance would deteriorate when the joints are hidden due to
self-occlusion.

- 9 -
Chapter 3 Methodology
Figure 1. Flow chart of human motion analysis system.
3.1 System overview
The flow chart of the proposed human motion analysis system is shown in Figure 1,
which consists of two phases: the learning phase and detection phase. In the learning
phase, the objective is to build up a background model, which is the essential part of
the background subtraction module. The background model is constructed using a
sequence of background images. The system goes into the detection phase after the
background model is obtained. Each input image with foreground objects would be
first processed by the background subtraction module, and then this module will
classify all image pixels into background and foreground pixels respectively. The
Learning
Phase
Detection
Phase
Background
Pixels
Foreground
Pixels
Skeleton Body part
trajectories

- 10 -
background pixels will be passed back to the background model for update.
Meanwhile, this module will output an image constructed with the foreground pixels,
which will be the input of the analysis module. The analysis module will perform
some morphological operations on the input image to improve the shape of the human
body obtained. And then this module will construct a skeleton of human body with the
boundary of the body and some interested points located in the upper part of the body.
The tracking module will use this skeleton image as an input, and apply a Kalman
filter for tracking the target object. The Kalman filter will output the body part
trajectories and then the whole process finishes in here.

- 11 -
3.2 Background subtraction module
3.2.1 Background modeling
(a) Original image
(b) Formation of non-overlapping (c) One block of pixels (d) Histogram
image blocks
Figure 2. Demonstration of a region based background modeling process.
Gray level
No. of pixels
Dividing into
blocks

- 12 -
A region based approach is employed for background modeling, and Figure 2
demonstrates the process. Figure 2(a) is an original image. It will be first partitioned
into a number of non-overlapping square blocks. Figure 2(b) presents the partitioning
step. For each of those non-overlapping blocks, represented by Figure 2(c), a
histogram is established to record the pixel values of the image block. This process
will be repeated for a specific number of background images. Figure 2(d) shows the
histogram of a particular block summed over 50 image frames. The histogram is
similar to a Gaussian distributed model, hence the standard deviation and mean value
could be used to represent the characteristics of that image block. Any image pixel
that falls within the mean ± 4 standard deviation would be considered as a background
pixel.
(a) Formation of non-overlapping (b) One block of (c) Multi-Gaussian
image blocks composite background distributed
histogram
Figure 3. Modeling composite background.
Gray level
No. of pixels
- 13 -
However, composite background could exist in some blocks. The histograms of those
blocks will be characterized by a multi-Gaussian distributed model. Figure 3(b) shows
an image block with two background regions: water and lane divider. Figure 3(c)
shows the corresponding histogram. A K-means algorithm is employed to obtain the
mean value and standard deviation of individual Gaussian distributions for
background pixel identification.
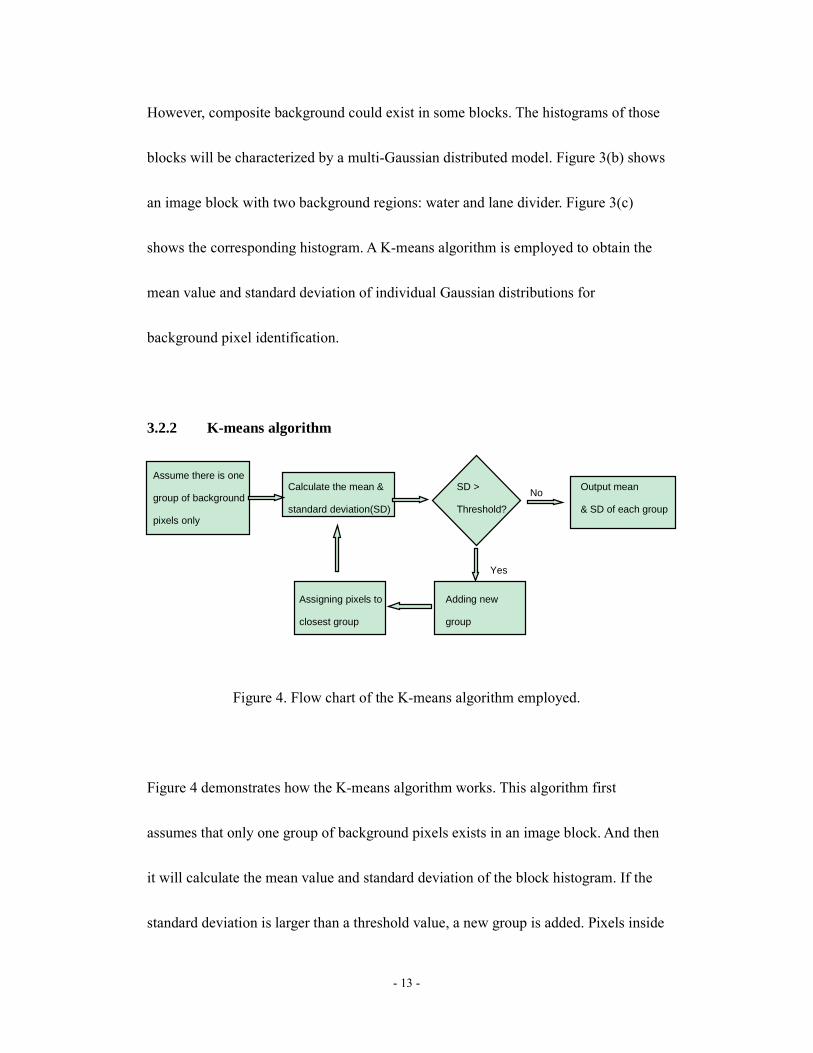
3.2.2 K-means algorithm
Figure 4. Flow chart of the K-means algorithm employed.
Figure 4 demonstrates how the K-means algorithm works. This algorithm first
assumes that only one group of background pixels exists in an image block. And then
it will calculate the mean value and standard deviation of the block histogram. If the
standard deviation is larger than a threshold value, a new group is added. Pixels inside
Assume there is one
group of background
pixels only
Calculate the mean &
standard deviation(SD)
SD >
Threshold?
Adding new
group
Output mean
& SD of each group
Yes
No
Assigning pixels to
closest group

- 14 -
the block will be assigned to the closest group, the mean value and standard deviation
of each group will be recalculated. The algorithm will output the mean value and
standard deviation of all background regions only when the standard deviation of each
group is smaller than a threshold value, or the number of groups is larger than two.
3.2.3 Foreground detection
Figure 5. Histogram of an image block with two background regions.
When the system goes into the detection phase, each image pixel will be examined
with respect to its own image block histogram. It will be first assigned to the closest
background region as follow: let there are two background regions exist in a block,
group A and group B as shown in Figure 5, with mean values Ma, Mb and standard
deviations SDa and SDb respectively. Let p be one of the pixels of the block.

- 15 -
If
absolute difference between p and Ma is smaller than that between p and Mb
then
p belongs to group A.
else
p belongs to group B.
Assume that p belongs to group A in this example. If the pixel value of p falls into the
region under the curve of A, p is a background pixel, otherwise, it belongs to
foreground. This process could be explained as follow:
If
absolute ( p - Ma ) < N x SDa i.e p falls into the region under the
curve of A
then
p is a background pixel
else
p is a foreground pixel
The value of N is determined empirically.

- 16 -
Any detected background pixel will be added into its own image block histogram,
which will be used to do the foreground detection for the next image frame.
3.2.4 Median filter
(a) (b)
(c)
Figure 6. (a) Original image; (b) image after background subtraction; (c) image after
median filtering.

- 17 -
Every input image with foreground objects will be processed by the background
subtraction module, and the foreground objects will be extracted and form an output
image, which is presented in Figure 6(b). This output image will be processed by a
median filter to remove some noise caused by background subtraction, and the result
is shown in Figure 6(c).
Figure 7. Calculating the median value of a pixel neighborhood. [7]
A spatial median filter is employed in the system to remove the speckle noise in
intermediate result. Each pixel in the image will be examined by the median filter in
turn; this filter looks at each pixel’s neighbors to find a representative value of its
surroundings. The median of neighboring pixel values will replace the current
examining pixel value. The median is determined as follow: start by sorting all
surrounding neighborhood pixel values as well as the pixel being examined, into

- 18 -
numerical order. And then the pixel being examined will be replaced with the middle
pixel value. An illustration is given in Figure 7, where a 3x3 square neighborhood is
used. The pixel at the center with pixel value 150 is being examined, and it is replaced
with the middle pixel value 124 after sorting all neighboring pixel values into
numerical order.
3.3 Analysis module
After the background subtraction process, some morphological operations will be
performed in order to obtain a better shape of the target objects. The first
morphological operation is dilation.
3.3.1 Dilation operation
Dilation is a basic operation in mathematical morphology. E is defined as an
Euclidean space, A is a binary image in E, and B is a structuring element. The dilation
of A by B is defined by [8]:
(1)

- 19 -
(a) Image after background (b) Image after dilation
subtraction.
Figure 8. Result of dilation operation.
The effect of the dilation operation is to enlarge the foreground regions, while holes
within those regions could be filled up. Besides, nearby disjoint foreground objects
could be connected. Figure 8 shows the result of this operation. Figure 8(a) is the
image before dilation. We can see that the swimmer’s body is separated into several
disjoint parts after the background subtraction, and some holes exist inside the body
region. Figure 8(b) is the result image of dilation operation. The holes inside the body
region are filled up and those disjoint parts are reconnected to form a complete human
body.

- 20 -
Figure 9. 8-connected neighborhood.
(a) Before dilation (b) After dilation
Figure 10. Illustration of dilation operation - white pixel: background; black pixel :
foreground.
An 8-connected neighborhood scheme is employed in the dilation operation. For a
pixel p shown in Figure 9, the eight pixels surrounding it are considered as its
8-connected neighbors. This 8-connected neighborhood scheme considers each pixel
in the image in turn. Assume p is a background pixel. If at least one of its 8-connected
p p p p

- 21 -
neighbors is a foreground pixel, it will be changed to the foreground pixel as well.
Figure 10 illustrates this process. In Figure 10(a), p is a background pixel, but one of
its 8-connected neighbors is a foreground pixel. So p will be changed to a foreground
pixel. This operation will examine every pixel in the image and finally the foreground
region will be expanded, as shown in Figure 10(b).
3.3.2 Erosion operation
Since the dilation operation will expand the size of foreground objects, an opposite
morphological operation, erosion, is applied on the result of dilation in order to shrink
the size of those foreground objects. Erosion is another basic operation in
mathematical morphology. Assume that E is an Euclidean space, A is a binary image
in E, and B is a structuring element. The erosion of A by B is defined by:
(2)
where Bz is the translation of B by the vector z.[9]

- 22 -
(a) Image after dilation (b) Image after erosion
Figure 11. Result of erosion operation.
Figure 11(a) shows an image after the dilation operation. The foreground objects are
expanded in this image. An erosion operation is applied on this image, which aims to
shrink the size of foreground objects. The result is shown in Figure 11(b), in which
the size of foreground objects is reduced, and the contours are improved.
(a) Before erosion (b) After erosion
Figure 12. Illustration of erosion operation - white pixel: background; black pixel :
foreground.
p p

- 23 -
Again, the 8-connected neighborhood is employed here. Every pixel in the image
will be considered by this 8-connected neighborhood scheme. As shown in Figure
12(a), if p is a foreground pixel and at least one of its 8-connected neighbors is a
background pixel, it will be changed to a background pixel. After all pixels are
examined, the foreground object will be shrunk as shown in Figure 12(b).
3.3.3 Boundary extraction
After the erosion operation, the contours of foreground objects are repaired. The next
step is to obtain the boundary of those foreground objects, which is critical
information for the subsequent steps in the analysis module. A boundary extraction
operation is employed to handle this task.
(a) Image before boundary extraction (b) Image after boundary extraction
Figure 13. Result of boundary extraction.

- 24 -
Boundary extraction aims to preserve the boundary pixels of foreground objects while
removing all other foreground pixels. Those boundary pixels represent the contours of
the foreground objects, which are valuable data for further analysis. With the interior
foreground pixels removed, the analysis can be performed more efficiently. Figure
13(a) shows an image before the boundary extraction. After the boundary extraction
operation, only the boundary pixels of foreground objects remained as shown in
Figure 13(b).
Figure 14. Illustration of boundary extraction operation.
The operation of boundary extraction could be explained as follow:
Step 1. Apply erosion operation on the original image.
Step 2. Subtract the eroded image by the original image.
Step 3. The pixels remained are the boundary pixels.
(a) Original image (b) Image after
erosion
(c) Image with
boundary pixels
only

- 25 -
The above process is illustrated in Figure 14, where Figure 14(b) is the eroded image
obtained from the original image of Figure 14(a). Figure 14(c) shows the image of
boundary pixels obtained by the subtraction process.
3.3.4 Removing the non-body objects
(a) Image with foreground and (b) Image after removing the
background objects background objects
Figure 15. Removal of non-body objects.
Figure 15(a) shows an image after the boundary extraction operation. Many small
connected regions remain after the background subtraction operation. These
connected regions, representing non-stationary background regions, will be
considered as non-body objects and removed by a non-body removal scheme. This
scheme works as follow:

- 26 -
Labeling all connected regions in the image as objects
For each of those objects
if
Its area is smaller than a threshold value
then
the object is removed.
The process of labeling the connected regions mentioned above employs a connected
component labeling algorithm. This algorithm uses a two-pass approach [10]:
On the first pass:
Step 1. Scan each pixel on the image.
Step 2. If the pixel is a foreground pixel.
1. Get its 8-connected neighboring pixels.
2. If there are no neighbors, assign a new label for the current
pixel and continue.
3. Otherwise, find the smallest label in the neighbors and assign it
to the current pixel.
4. Store the equivalence between neighboring labels.

- 27 -
On the second pass:
Step 1. Scan each pixel on the image.
Step 2. If the pixel is a foreground pixel.
1. Re-label the pixel with the smallest equivalent label.
The process discussed above is illustrated in Figure 16.
(a)
(b)
(c)

- 28 -
Figure 16. Connected component labeling: (a) Input image with foreground pixels of
1; (b) Result of first pass - check 8-connected neighbors for labeling and equivalent
labels are indicated; (c) Result of second pass - replacing all equivalent labels with the
smallest label.
3.3.5 Extracting extremal points
Figure 17. Process of extracting extremal points.
After the boundary image is obtained by the boundary extraction operation, some
extremal points on the human body have to be located. Those extremal points include
the legs and hands. However, before we could do that, the centroid of the human body
Centroid distance
Border position
distance
Border position Averaging
Filtering
(a)
(b)
(c) (d)

- 29 -
has to be determined first. Since position of the boundary pixels are already known,
the position of the centroid can be calculated as follow:
Let ( cx , cy ) be the position of the centroid, then
∑ == N
i ixN 1c1x (3)
∑ == N
i iyN
y1c
1 (4)
where N is the total number of boundary pixels, ( ix , iy ) is the position of a pixel on
the boundary.
After we get the centroid of the human body as shown in Figure 17(a), the distance
between each boundary pixel and the centroid, as shown in Figure 17(b), is calculated
as follow:
2)(2)(c
yi
yc
xi
xi
d −+−= (5)
The distance profile in Figure 17(b) is very fluctuating. An averaging filter is applied
to remove the noise, and the result is shown in Figure 17(c).
Those local maxima in Figure 17(c) are taken as the extremal points, and the image in

- 30 -
Figure 17(d) is constructed by connecting all those extremal points to the centroid.
The local maxima can be determined by finding the zero-crossings in the difference
function.
1−−= iii ddδ (6)
3.3.6 Locating interested points
(a) (b)
Figure 18. (a) Interested points located in the boundary image. (b) Interested points
overlaid on the original image.
Some interested points have to be located in the upper part of the human body. They
include the shoulders, elbows and hands. A skeleton can be constructed to represent
the upper part of the body by connecting those interested points, which is shown in
Figure 18(a). Figure 18(b) illustrates how accurate the locating mechanism with the
Centroid
Shoulders
Elbows
Hands

- 31 -
interested points overlaid on the original image.
Since the position of two hands and the centroid are already known from the previous
step, the locating mechanism only needs to locate the elbows and shoulders, which is
illustrated in below.
Figure 19. Locating elbow position.
Figure 19 illustrates how the elbows can be located. Since the positions of two hands
are known, by calculating the average value of those two positions, the point d can be
located. A line can be constructed by connecting point d to the centroid. This line is
broken into two parts with a predefined ratio, and then point e can be located. A
horizontal line L, which crosses point e, is formed. Start from point e and search along
d
e
L
- 32 -
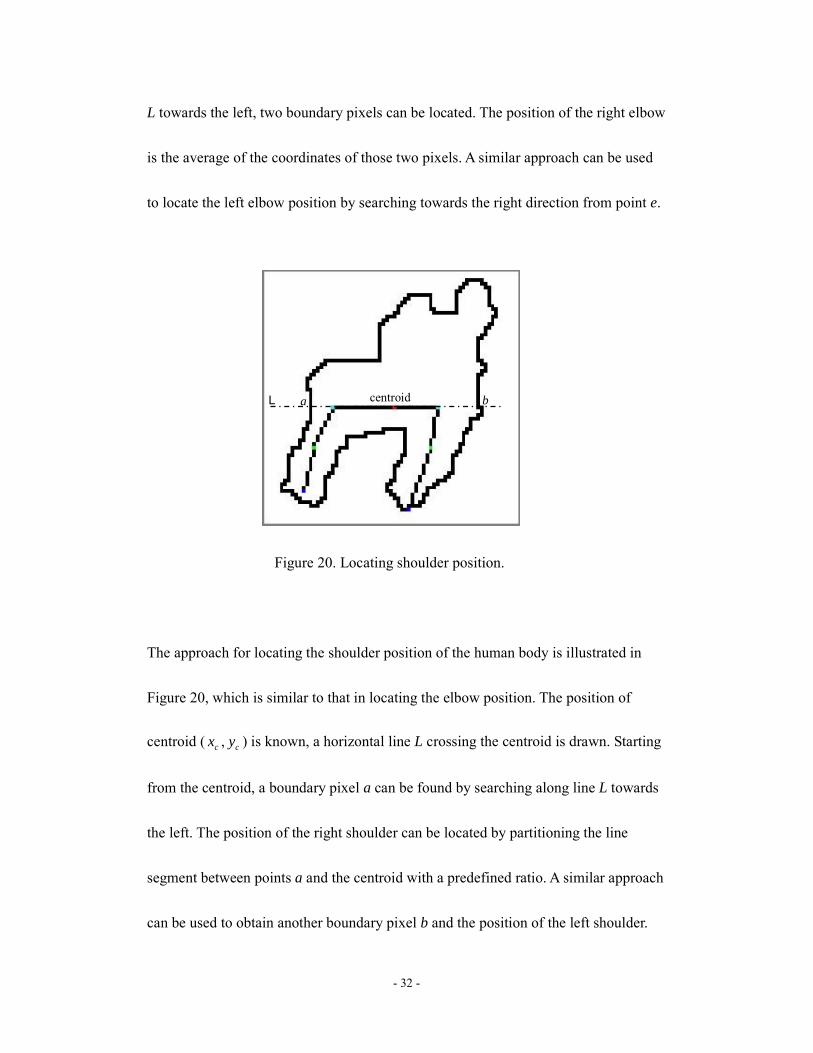
L towards the left, two boundary pixels can be located. The position of the right elbow
is the average of the coordinates of those two pixels. A similar approach can be used
to locate the left elbow position by searching towards the right direction from point e.
Figure 20. Locating shoulder position.
The approach for locating the shoulder position of the human body is illustrated in
Figure 20, which is similar to that in locating the elbow position. The position of
centroid ( cx , cy ) is known, a horizontal line L crossing the centroid is drawn. Starting
from the centroid, a boundary pixel a can be found by searching along line L towards
the left. The position of the right shoulder can be located by partitioning the line
segment between points a and the centroid with a predefined ratio. A similar approach
can be used to obtain another boundary pixel b and the position of the left shoulder.
L a b L a b centroid

- 33 -
3.4 Tracking module
Figure 21. Illustration of Kalman filter.
In the tracking module, we assume that the swimmer swims at a constant velocity. A
Kalman filter is employed for tracking the target object. The employed Kalman filter
can estimate the position of the swimmer recursively, where the position of the
swimmer is represent by the centroid of the body part. Figure 21 illustrates how this
filter works. Five major equations are used and they are separated into two models:
the prediction model and the correction model. The first equation in the prediction
model predicts the current position of the human body part by using the last estimated
Prediction Model Correction Model
Initial Value of
and
Predict the position
Predict the error covariance
Calculate the Kalman gain
Update estimate with measurement
Update the error covariance

- 34 -
value, where k
S − is the current predicted value for the position, 1−k
S is the last
estimated value, V is the constant velocity, T∆ is the time between two consecutive
video frames, Wk is the random noise variable. The second equation in the prediction
model predicts the error covariance ahead, where k
P − is the predicted error
covariance, 1−k
P is the last estimated error covariance, Q is the error covariance of
the random noise variable Wk. Both the predicted position value
kS − and
kP − will
be input into the correction model for correction. The first equation in the correction
model outputs the Kalman gain, where k
K is the Kalman gain, k
P − is the error
covariance of predict value, R is the error covariance of the measurement value. The
second equation in the correction model calculates the estimated value for the position
by using the predicted value of the positionk
S − , the measurement value of the position
kZ and the Kalman gaink
K . The third equation in the correction model updates the
error covariance. Both the estimated value of position kS and updated error
covariance kP will be input back into the prediction model for predicting the next
position value. Therefore, after inputting the initial estimates for 1−kS and 1−kP , the
Kalman filter can run recursively, the Kalman gain and other variables can be updated
automatically.
- 35 -
Chapter 4 Result
4.1 System Configuration
This final year project is developed on a notebook computer with the following
configuration:
CPU: Intel Core(TM) 2 Duo CPU P8600, 2.40GHz
Memory: 2 GB
Hard disk: 200 GB
Operation system: Windows Vista
The program of this project is implemented in C++ programming language with
Microsoft Visual Studio 2008 software kit. The libraries used in this project are listed
in below:
#include <stdlib.h>
#include <iostream>
#include <fstream>
#include <string>
#include <sstream>
#include <math.h>
The video data used for testing is in MPEG-2 format with a 720x576 resolution and
the frame rate is 25 fps.

- 36 -
4.2 Background Subtraction
Figure 22. Images in the first row are the original ones, images in the second
row are the corresponding results of background subtraction.
Figure 22 shows the results of background subtraction, where 30 image frames are
used for building up the initial background model. The major noises remained are the
pixels of the lane dividers on the water surface and those on the bottom of the
swimming pool. The lane divider on the water surface will float and wave due to the
move of water, which makes its position in different image frames be different, and
hence provides a great challenge to the background subtraction process, which
assumes that all background objects should be static. Besides, swimmer will make
ripples on the water surface when she/he is swimming. The constant color of the lane
divider on the bottom of the pool will be disturbed by the ripples. Both causes

- 37 -
contribute to non-stationary background pixels in the image which are difficult to be
remove by the background subtraction. However, the results shown in Figure 22 are
much better than the traditional frame difference approach. The figure below shows a
comparison of the two approaches.
Figure 23. Comparison between frame difference and region-based approach.
Since the frame difference approach simply perform the subtraction between an image
with foreground objects with a background image (template), a pixel is assigned as
foreground if its difference is larger than a threshold value. However, the variation of
the pixel value is very large. No matter using a low threshold (30) or a relatively high
threshold (100), there are still many background objects remained after the
background subtraction. The result of using a low threshold and high threshold is
shown in Figure 23(a) and (b) respectively. Figure 23(c) shows the result of using the
Input Image
Frame Difference
Region-based
(a) Low Threshold (b) High Threshold
(c)

- 38 -
region-based approach we proposed. The background objects remained in the image is
comparatively much less than that using the frame difference approach, and it
demonstrates that the performance of the region-based approach is much better than
the frame difference approach in doing background subtraction in the aquatic
environment. It is because the region-based approach constructs the background
model in blocks. When classifying a pixel as foreground or background, the pixel is
compared with the Gaussian distributed model of its own image block, not just
compared with the corresponding pixel values in previous frames only. Therefore, the
region-based approach is less sensitive to the variation of pixels value and hence
achieves a better performance.

- 39 -
4.3 Median Filter
(a)
(b) (c) (d)
Figure 24. Median filtering (a) image after background subtraction; (b), (c) and (d)
images after applying median filter on (a) with window size 3x3, 9x9 and 15x15
respectively.
The median filter can effectively remove the background objects still remained after
the background subtraction operation, and the results are shown in Figure 24. The
larger the window size used in the median filter operation, more background objects
could be removed. The result shown in Figure 24(d) uses the largest window size, so
the background objects remained are the least. However, a larger window size can
also affect the shape of the foreground region (human) more. Figure 24(b) uses the
smallest window size, so the shape of the human body is most similar to that in Figure

- 40 -
24(a). Therefore, by considering the effect on the shape of the human body and the
strength of the noise reduction, the window size of 9x9 is considered as the best for
median filtering and Figure 24(c) shows the result.
4.4 Morphological Operations
- 41 -
Figure 25. Two sets of results of morphological operations are shown in the left and
right columns respectively. From top to bottom rows: original, dilation, erosion,
boundary extraction, non-body object removal.
In the left column of Figure 25, the dilation operation can successfully fill up all the
holes within the body and connect the disjoint parts. It helps the subsequent boundary
extraction operation to obtain a complete boundary of the human body. However, if
the distance between the disjoint parts is too large, the dilation operation cannot
reconnect the disjoint parts. The result in the right column of Figure 25 shows such a
case. Since the dilation is unable to reconnect the well separated disjoint parts, the
subsequent non-body object removal operation will mistakenly treat the isolated left
hand region of the swimmer as a background object, and remove it from the image.

- 42 -
4.5 Locating Interested Points
Figure 26. (a) A skeleton is drawn on the boundary image with the located
interested points. (b) Interested points are overlaid on the original image.
Figure 26 shows the result of successfully locating the interested points. A skeleton is
constructed with those located interested points. This skeleton is valuable information
for other project such as human motion recognition, because by finding the angles
between those points, high-level interpretation could be done. Those interested points
are also highlighted and overlaid on the original image for performance evaluation. It
can be seen that the accuracy of the locating process is quite high in this case.
Figure 27. An unsuccessful case on locating interested points.
Centroid
Shoulders
Elbows
Hands
Centroid
Shoulders
Elbows
Hands
- 43 -
The performance of the locating process is heavily relied on the quality of the
boundary of human body obtained. If the human body obtained is incomplete, the
performance of the locating process will deteriorate. Figure 27 shows such a case.
Although the position of the centroid is acceptable, all other interested points are
located incorrectly.
4.6 Tracking Process
4.6.1 Result of Kalman Filter
Kalman F ilter Result
0
50
100
150
200
250
300
350
400
1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76 81
Frame Number
Position(Y-coordinate)
Measured
P redicted
Estimated
Kalman Filter Result
0
100
200
300
400
500
600
700
1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76 81
Frame Number
Position(X-coordinate)
Measured
Estimated
Predicted
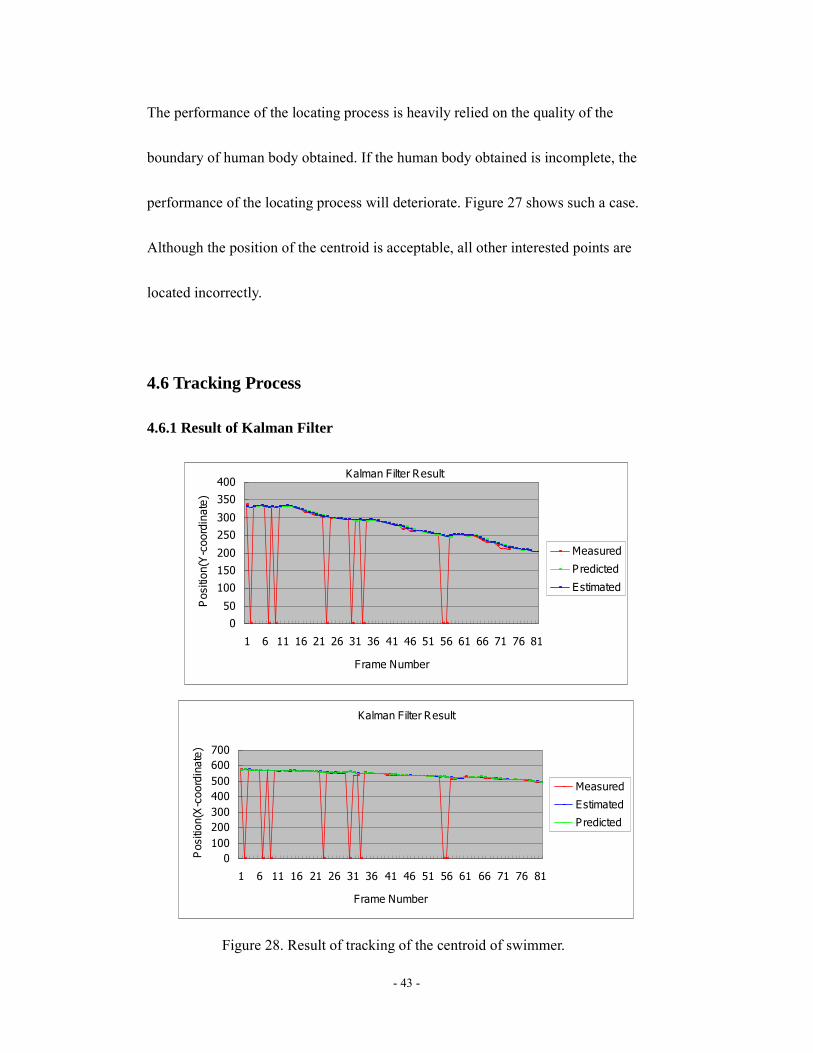
Figure 28. Result of tracking of the centroid of swimmer.

- 44 -
The Kalman filter has been tested on some video clips. Figure 28 shows the result of
tracking the centroid of a swimmer on one video clip. We can see that the measured
position, predicted position and estimated position are close to each other most of the
time. For the cases that there are large errors in the measured value, the estimated
value will be shifted towards the predicted value, and the tracking process can go on.
The reason why the measured value drops to zero in some frames is that in some
frames the swimmer is occluded by the splash. The background subtraction could not
extract the body region successfully, and therefore there is no measured data.
(a) (b) (c)
(d) (e) (f)
Figure 29. Applying Kalman filter on tracking interested points.
Centroid Shoulders
Elbows Hands

- 45 -
The Kalman filter is also applied on tracking the movement of those interested points,
which aims to assist the locating process. The results are shown on the Figure 29. The
accuracy of this tracking process is high for the gestures when the two hands are
stretched out. The performance will deteriorate when both hands are pulled back
underneath the body - a self-occlusion problem.
4.6.2 Object Tracking
Figure 30. From left to right, from top to bottom. A rectangle is drawn around
the body part of the swimmer.

- 46 -
Figure 30 shows the tracking of a swimmer on a video clip. A green rectangle is
drawn around the body part of the swimmer to illustrate the performance of the
tracking process. The rectangle is constructed by using the estimated positions of the
centroid as the center, and its size is determined by the body part obtained in the
background subtraction process. The tracking process focuses on the upper part of the
body, so the size of this bounding rectangle will change according to the stretch of the
two hands. We can see from Figure 30 that the tracking performance is good since the
rectangle can enclose the body part most of the time.

- 47 -
Chapter 5 Discussion
We proposed a region-based approach for the background modeling process, which
is less sensitive to the wide change of background pixels along the image sequence.
Therefore, the results in the background subtraction are quite acceptable. Some
interested points can be located on the upper part of the body, which will be valuable
information for motion recognition. Besides, the tracking module can also
successfully track the motion of the swimmer by employing the Kalman filter.
However, there are three major limitations exist in the system. The first one is that the
image frames used for building up the background model must come from a
stationary camera. It is because the region-based background subtraction heavily
relies on the information provided by previous frames. While light source variation
can be compensated by the adaptive updating of the background model, if the
background is spatially changing due to waving water, there is not reliable
information provided for this approach to determine whether a pixel belongs to
foreground or background. Nevertheless, this limitation exists in the traditional frame
difference approach too. In order to do background subtraction in a dynamic
environment, some researches used a skin model to identify the human body. A

- 48 -
specific color range will be used for the skin model. Any pixels fall into that range
will be considered as foreground, but this approach assumes that there are no
background objects with the same color range.
Another limitation exists in the analysis module, currently it is developed for
analyzing the breaststroke swimming style only. We focused on analyzing the
breaststroke since this swimming style has the following three advantages: 1) The
swimming speed of breaststroke style is relatively slow as compared with freestyle
and butterfly, which contributes a very small difference in two consecutive frames and
hence makes the human region easier to locate and analyze. 2) Breaststroke is a very
gentle swimming style with much less splash, which reduces the difficulty in
background subtraction. 3) In breaststroke swimming, the two hands will be stretched
out from the body most of the time, which makes them easier to be differentiated from
the trunk.
The last limitation exist in the system is that the Kalman filter employed in the
tracking module assumes that the swimmer swims at a constant speed, and the
prediction model in the filter is built up based on this assumption. However, even for
the same swimming style the swimming speed will not be constant all the time, which
- 49 -
contributes to a large error in the prediction. Hence the final estimated value is shifted
towards the measurement value. The tracking accuracy relies on the measurement
value, so if the accuracy of the measurement value is deteriorated due to a poor
background subtraction, the overall performance of the tracking module will be
downgraded. Future work can be done to solve this problem by increasing the
accuracy of the prediction model, which can be achieved by considering the
periodicity of the swimming motion.

- 50 -
Chapter 6 Conclusion
This final year project proposed a vision system for analyzing the swimmer’s motion.
We adopted a region-based approach in doing the background subtraction in order to
extract the human body from an image sequence of a swimming video. After
obtaining the human body part, some interested points including hands, elbows,
shoulders and the centroid will be located in the upper part of the body. These are
useful data for the subsequent project on human motion recognition. A tracking
process is also established on tracking the movement of the swimmer aiming to
acquire the trajectories of the body parts. Future work includes developing a tracking
process on tracing the movement of the interested points, which intends to increase
the accuracy on locating those interested points.

- 51 -
Reference
[1] J. Triesch; C. Von Der Malsburg: A gesture interface for human-robot-interaction.
Proceedings of the Third IEEE International Conference on Automatic Face and
Gesture Recognition. 14-16 April 1998, pp. 546 - 551
[2] http://www.detec.no
[3] H. L. Eng; K. A. Toh; W. Y. Yau; J. X. Wang:
DEWS: A Live Visual Surveillance System for Early Drowning Detection at Pool.
IEEE Transactions on Circuits and Systems for Video Technology, Vol. 18, No. 2, Feb.
2008, pp. 196-210
[4] H. L. Eng; J. W; S. W. Kam and W. Y. Yau: Robust Human Detection Within a
Highly Dynamic Aquatic Environment in Real Time. IEEE Transactions on Image
Processing, Vol. 15, No. 6, June 2006, pp. 1583-1600
[5] H. Fujiyoshi; A. J. Lipton: Real-time Human Motion Analysis by Image
Skeletonization. Proceedings of Fourth IEEE Workshop on Applications of Computer

- 52 -
Vision, WACV '98. 19-21 Oct. 1998, pp. 15 - 21
[6] K. L. Chan: Video-Based Gait Analysis By Silhouette Chamfer Distance and
Kalman Filter. International Journal of Image and Graphics, Vol. 8, No. 3, July 2008,
pp. 383-418
[7] http://homepages.inf.ed.ac.uk/rbf/HIPR2/median.htm
[8] http://en.wikipedia.org/wiki/Dilation_(morphology)
[9] http://en.wikipedia.org/wiki/Erosion_(morphology)
[10] http://en.wikipedia.org/wiki/Connected_Component_Labeling