styremaskine - vbn.aau.dkvbn.aau.dk/files/43401470/m5_rapport.pdf · dynamisk pÅvirkede...
TRANSCRIPT
Styremaskine P5-projekt Gruppe M5-2-e10 Aalborg Universitet Esbjerg 2. september 2010 - 20. december 2010


DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 A
Titelblad Titel: Styremaskine Tema: Dynamisk påvirkede konstruktioner Projektperiode: 2. september 2010 - 20. december 2010 Projektgruppe: M5-2-e10 Vejledere: Hovedvejleder Anders Schmidt Kristensen Bivejleder Ronnie Refstrup Pedersen Bivejleder Søren Heide Lambertsen Oplagstal/Sideantal/Bilag/Appendiks/CD-rom: 7 96 1 6 1 Afsluttet:
20. december 2010
Synopsis:
Denne rapport indeholder en problemstilling, hvor der skal laves en basisprojektering af fire-stemplede styremaskiner til skibe. Der foreligger et basisdesign, der ønskes gennemarbejdet og dimensioneret med henblik på, at kunne overføre metoder og beregninger nemt mellem forskel-lige styremaskiner til forskellige skibe. Der er i projektet lagt vægt på den statiske dimensionering af tilleren, mens de øvrige ma-skindele i styremaskinen er gennemgået og beregnet, i det omfang det har været nødvendigt for at dimensionere tilleren. Derudover er der også lagt vægt på udmattelsesberegninger i det kriti-ske punkt på tilleren. Alle beregninger er lavet med håndberegninger, der er understøttet af ana-lyser i Ansys Workbench. Der er lagt vægt på spændingsberegninger og deformationsberegnin-ger. Ydermere er Workbench anvendt til at vurdere designet af tilleren i forhold til de belastnin-ger, den måtte udsættes for. Rapporten giver en fuld beskrivelse af et styresystem til et skib. Således er både styringen og reguleringen behandlet, mens der udover dimensioneringen af de enkelte dele er givet kvalitati-ve bud på, hvordan samlingerne og kraftoverførslerne skal udføres. Derudover er der taget høj-de for montering og service af hele styremaskinen i styremaskinrummet. Rapporten er udarbejdet ud fra gældende regulativer og regler, der er udstukket af de rele-vante offentlige og private instanser. Styremaskindesignet er implementerbart i mange skibstyper, og derfor vurderes rapporten at opfylde de ønskede mål for projektet.

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 B
Forord Dette projekt er udarbejdet af maskingruppe M5-2-e10 fra Aalborg Universitet Esbjerg i perioden 2. september 2010 - 20. december 2010. Temaet er ”Dynamisk påvirkede konstruktioner”, og i denne rapport gennemarbejdes en dimensionering af en styremaskine. Der skal arbejdes med et sammensat maskinsystem, og på dette system skal regulering, konstruktion og dynamik kunne indgå. Rapporten tager udgangspunkt i et projektoplæg fra Scan Steering. Det er herigennem ønsket at udvide deres eksisterende sortiment af styremaskiner med en fire-stemplet model. Dette skyldes en øget efterspørgsel af deres produkter til stadig større skibe. Projektmodulet er udarbejdet på baggrund af den undervisning, der er givet gennem uddannel-sen, og det er derfor en forudsætning, at læseren har indsigt i visse standardbegreber og den teori, der omhandler de behandlede områder. Samtidig forventes det, at læseren har et basiskendskab til maritime udtryk. Litteraturhenvisninger anføres med en firkantet parentes, samt et kildenummer der henviser til kil-delisten bagerst i rapporten. Samtidig er kilderne delt ind med et nummer for hovedkilden og et nummer for underkilden som eksempelvis [1.1]. Litteraturen anføres med dato, såfremt den er hen-tet på internettet. Derudover findes der også en fast kopi af disse sider, i tilfælde af at indholdet skulle blive ændret undervejs. Alle enheder holdes så vidt muligt i SI-enheder. Ligningerne vil blive nummereret, så det første tal i parentesen angiver kapitel, og det andet tal angiver ligningsnummeret som eksempelvis (3.6). Der vedlægges en cd-rom bagerst i rapporten, der indeholder de relevante appendiks og bilag. Gruppen vil gerne takke: Anders Schmidt Kristensen Ronnie Refstrup Pedersen Søren Heide Lambertsen Lars Damkilde Maskinchef Morten Guldvang, A.P. Møller Maersk Line Udarbejdet af: Nathalie Weisz Carsten Jasper Michael Larsen Torben Mogensen

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 C
Indholdsfortegnelse
1 Indledning 1
1.1 Problemstilling 1 1.2 Design forslag 2 1.3 Rapportens opbygning 3
2 Analyse 4
2.1 Valg af ror og størrelse 5 2.2 Miljøanalyse 6 2.3 Regler og love 6 2.4 Materialer i systemet 7 2.5 Læringsmål 9 2.6 Problemformulering 9 2.7 Problemafgrænsning 9 2.8 Kravspecifikation 10
3 Kræfter på roret 11 4 Rorstammen 20
4.1 Statisk analyse af rorstammen 20 4.2 Spændingsanalyse 21 4.3 Nedbøjningen 22 4.4 Workbench beregninger 23 4.5 Lejer til rorstammen 25 4.6 Kegleprespasning 26
5 Ansys Workbench 29
5.1 Verifikation af Ansys Workbench 32
6 Tiller 33
6.1 Kraftsituationen på roret 33 6.2 Dimensionering af tilleren 34
7 Styring og regulering 47
7.1 Samlet hydraulik 47
8 Lasthistorik 50 9 Udmattelse 54
9.1 Belastninger 54 9.2 Workbench analyse 55 9.3 Beregninger 62 9.4 Konklusion på levetid 66
10 Monteringsrammer 67 11 Konklusion 68 12 Kildeliste 69 13 Appendiks 73 14 Bilag 91

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 1 Kapitel 1 Indledning
1 Indledning A/S Scan, der har beliggenhed i Hvide Sande, er en virksomhed, som har over 50 års erfaring med udvikling og produktion af forskellige marinekonstruktioner. A/S Scan er delt op i fire afdelinger, som hedder Scan (maskinfabrik), Scan Winches (dækudstyr), Scan Steering (styremaskiner) og Scan Industries (gas og kedelinstallationer).
Projektet tager udgangspunkt i en analyse, beregninger og dimensionering af en styrema-skine til skibe. Igennem projektet arbejdes der ud fra et hovedkoncept fremlagt af Scan Stee-ring, som har stor erfaring indenfor fremstil-ling og installation af styresystemer til forskel-lige mindre fartøjer.
På figur 1 ses, hvordan en typisk styrema-skine fra Scan Steering kan se ud. Styremaski-nen er placeret i styremaskinrummet umiddel-bart over roret på fartøjet, og selve maskinen er forbundet til roret via rorstammen. Styrema-skinen på figur 1 er bygget op med to dobbelt-virkende hydraulikstempler, begge er forbun-det til en tiller i frit drejelige forbindelser. Stemplerne kan dreje tilleren, som er fastgjort på rorstammen og dermed roret. De dobbeltvirkende hydraulikstempler er drevet af hydraulikolie fra en oliepumpe, som typisk drives af en elektrisk motor. I det daglige foregår betjeningen vha. en autopilot fra skibets bro ud fra en indlagt rute. Generelt er opbygningen af en styremaskine og antallet af stempler afhængig af størrelsen på fartøjet og antallet af ror.
1.1 Problemstilling Scan Steering vil som følge af en stigende efterspørgsel af styremaskiner til større fartøjer gerne tilføje et styringssystem med en fire-stemplet styremaskine til deres modelprogram. Som nævnt i det ovenstående tilbyder Scan Steering allerede to-stemplede systemer, men det er ikke tilstrækkeligt at øge størrelsen på disse, hvorfor der skal designes et nyt koncept. Der foreligger ikke noget specifikt skibsdesign i denne rapport. Derimod ønskes det at udvikle et koncept for en fire-stemplet styremaskine, som derefter kan dimensioneres til forskellige skibstyper. I denne rapport tages der derfor udgangspunkt i et 200 m langt containerskib, som vurderes til et rimeligt fartøj som målgruppe. Der tages derfor udgangspunkt i følgende initierende problem:
”Hvordan dimensioneres en styremaskine til et 200 m langt containerskib?”
Figur 1 – To-stemplet styremaskine fra Scan Steering. På bille-det er udpeget de drivende cylindere og den drejelige tiller [1.1]

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 2 Kapitel 1 Indledning
1.2 Design forslag Det grundlæggende design for et fire-stemplet system er fastlagt af Scan Steering, og det ses skitseret på figur 2. For at kunne tilbyde et bedre produkt end konkurrenterne, skal den fire-stemplede styremaskine udføres så kompakt som mulig. Designet skal udføres sådan, at to stem-pler deler stempelarmen mellem dem, og derved undgås en nedbøjning og skævvridning af stem-pelarmene. Der skal placeres to sammenhæn-gende stempler foran og ligeledes to sammen-hængende agter for rorstammen. Stempelarmene skal forbindes med tillerarmene via en aksel og to glidere ved hver stempelarm, som skal sikre en god overførsel af kræfterne. Denne metode gør det muligt at fastmontere hydraulikcylindre-ne på deres positioner og derved ikke have flek-sible hydraulikslanger, men faste rørinstallatio-ner til hydraulikken. Styremaskinen skal opbyg-ges på en ramme, der kan deles i to sektioner for at lette installationen på værftet. Dette skal gøres med henblik på at mindske skader på styrema-skinen i byggeperioden på skibet. Det vil sige en ramme, som skal holde rorets bæreleje, og en ramme som rummer selve tilleren og hydraulikken samt elektronikken til denne. På denne måde er det muligt at montere rorstammen i bærelejet tidligt i byggeperioden, mens selve den tekniske del af tilleren kan monteres på et senere tidspunkt, når den ikke længere er så udsat.
Udover designet har Scan Steering yderligere defineret nogle dimensionskrav og et funktions-krav, som skal gøre sig gældende i det endelige design. Dimensionsmæssigt skal styremaskinen have en maksimal bredde og længde på henholdsvis 3700 mm og 1500 mm. Bredden og længden på styremaskinen er fastlagt, så de følger retningerne af bredden og længden på selve skibet. Højden på systemet skal ikke begrænses af et defineret mål, men skal dog holdes på et minimum. Det er fordi, styremaskinen skal deles på de tidligere nævnte rammer, og fordi Scan Steering vil give mulighed for at servicere bærelejet uden at demontere tilleren. Kravet for udsvinget er defineret af globale sikkerhedskrav, som foreskriver, at maskinen skal være i stand til at foretage et nødudsving fra 35 ° bagbord til 35 ° styrbord på maksimalt 28 sekunder. Derfor skal styremaskinen dimensioneres til, at kunne foretage udsving på maksimalt 35 ° til hver side.
Figur 2 - Fire-stemplet styremaskine. På billedet er de elementer udpeget som designmæssigt er fastlagt af Scan Steering. Roret følger tillerens retning [2.1]
DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 3 Kapitel 1 Indledning
1.3 Rapportens opbygning
Indledning
Analyse
Lastdefinition
Dimensionering
Udmattelse
Konklusion

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 4 Kapitel 2 Analyse
2 Analyse I denne analyse vil de nødvendige antagelser blive gjort og underbygget. Det gøres for at fastlægge værdier til de beregninger, hvor det er nødvendigt at kende specifikke værdier. Derudover er det også nødvendigt, at beskrive hvilke regler der gælder for et så vigtigt system, som styremaskinen er på et skib. Analysen vil blive afsluttet med en kravspecifikation, som vil dække, hvad løsningsaf-snittet skal indeholde og opfylde.
Funktion Styremaskinen skal flytte skibets agterende sideværts ved at dreje roret, som er placeret i den turbu-lente havstrøm genereret af skibsskruen. Et skib manøvrerer ved sejlads på en måde, som i grove træk kan sammenlignes med en gaffeltrucks styring, når den drejer med baghjulene. I nødsituatio-ner, hvor der ikke er elektrisk strøm, kan skibet ikke manøvrere, og der vil derfor kræves slæbebå-de. Det er fordi, hydraulikken kun fungerer, når elmotorene driver oliepumperne, som opretholder olietrykket. En styremaskine skal kun samles ved installationen på et skibsværft. Derfor skal maskinen frem-stilles ved en ekstern leverandør, som i dette tilfælde er Scan Steering, inden den leveres til værftet. Scan Steerings krav til dimensionerne på styremaskinen betyder dog også, at transporten af delene ikke vil give problemer. På et skibsværft forventes der at være kraner, der kan klare større løft.
Dimensioner på skibet Skibet, der skal dimensioneres en styremaskine til, er som nævnt i indledningen et containerskib med en længde på 200 m. Endvidere har skibet en bredde på 20 m og ved fuld last en dybgang på 10 m. Længden i vandlinjen fastsættes til 195 m (se figur 3). Disse dimensioner passer med Scan Steerings målgruppe af skibe til den nye fire-stemplede styremaskine. Skruen bliver fastsat til at have en diameter på 6 m, og et containerskib samt andre fragtskibe vil oftest kun have én skrue. Rorstammen bliver fastsat til at have en højde på 5 m fra rorets top til bunden af tilleren. Skibet vil have en tophastighed på 25 knob gennem vandet og en servicefart på 20 knob.
Figur 3 - Her ses skibets dimensioner. Bredde- og længderetningen overføres til styremaskinen

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 5 Kapitel 2 Analyse
2.1 Valg af ror og størrelse For at arbejde med lasttilfælde for styrema-skinen er det nødvendigt at opsætte en spe-cifik størrelse på et bestemt ror. Ved en mindre undersøgelse har det vist sig, at et spaderor er meget udbredt for skibe mellem 100 m og 200 m, som er målgruppen (se figur 4). Et spaderor er et ror, som hænger i rorstammen uden nogen understøtning fra kølen. Roret er set fra siden trapezformet og i et snit ovenfra formet som en vinge. Denne udformning betyder, at rorstammen ikke placeres forrest i roret, men omkring en tred-jedel fra forkanten. Udformningen sikrer et minimum af modstand gennem vandet, og roret er beskyttet, fordi det er placeret lidt højere end kølen på skibet. For at give skibet acceptable manøvre-egenskaber kræves en tilpas stor styreflade i forhold til skibets størrelse. Arealet på roret skal altså bestemmes ud fra skibets dimen-sioner [4.1].
퐴 = 퐷 ∗ 퐿퐺푉
100 1 + 25 퐵퐿퐺푉 (ퟐ.ퟏ)
Hvor: Ar er rorets areal D er dybgangen
LGV er længden gennem vandet fra stævnen til center på rorstammen
LGV sættes til 190 m, og dermed kan rorets areal beregnes:
퐴 = 10 ∗ 190
100 1 + 25 20
190 = 24,26푚 (ퟐ.ퟐ)
Rorets dimensioner kan nu sættes til en højde på 5,5 m, en toplængde til 5,3 m og en bundlængde til 3,5 m. Disse dimensioner giver et rorareal på 24,2 m2. Roret er her beregnet som en plade, fordi formlerne til kraften på roret er baseret på en pladeform.
Figur 5 - Her ses spaderorets dimensioner
Figur 4 - Her ses et spaderor. Roret hænger i rorstammen, og er ikke understøttet af et hælstykke [3.1]

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 6 Kapitel 2 Analyse
2.2 Miljøanalyse Styremaskinen vil formentlig blive udsat for et termisk miljø med forskellige klimaer og temperatu-rer gennem levetiden. Det vurderes, at styremaskinen kan blive udsat for temperaturer fra -25 ºC til 70 ºC. Dette vil dog være peaktemperaturer, og under normal sejlads kan der forventes temperaturer mellem frysepunktet og 30 ºC. Det kemiske miljø, som styremaskinen bliver påvirket af, består af flere ting. Der vil være salt, vand, smørefedt og forskellige olier i direkte berøring med styremaskinen hele tiden. Komponenter-ne skal derfor overfladebehandles med grunder og maling. I tropisk klima er der høj luftfugtighed, og derfor kan der være risiko for kondensdannelse på og i styremaskinens komponenter. Styremaskinen vil blive udsat for et mekanisk miljø med mange rystelser. På et fragtskib fore-kommer ofte store rystelser fra bl.a. hovedmotoren. Placeringen af styremaskinen betyder dog også meget kraftige rystelser, når stern thrusteren anvendes ved havnemanøvre. Stern thrusteren består af en propel, som drives af en stor elmotor, og propellen placeres i en tunnel, der konstrueres på tværs af skibet ved agterenden. Derudover vil der ved sejlads også være søgangen, som krænger skibet og dermed styremaskinen op til 65 ° i hårdt vejr.
2.3 Regler og love Dette projekt udarbejdes ud fra regulativer og lovgivning, der er beskrevet af de to instanser Inter-national Association of Classification Societies (IACS) og International Maritime Organization (IMO). Begge beskæftiger sig med en bred vifte af regulativer lige fra materialespecifikationer til retningslinjer i design. Fra IACS arbejdes der i dette projekt specifikt med underemnet Machinery Installations, hvor afsnit M42 [5.1] omhandler styremaskiner. Fra IMO anvendes forskrifterne fra SOLAS, hvilket står for Safety Of Life At Sea [6.1]. Derudover anvendes relevante normer fra Det Norske Veritas (DNV).
Materiale Materialerne, som skal anvendes til styremaskinen, er specificeret efter, hvilken funktion den på-gældende del har. Drejer det sig om kraftoverførende elementer, som skal overføre bevægelser fra stemplerne til roret, skal følgende specifikationer overholdes. Trækstyrken må ikke være under 650
, mens brudforlængelsen ikke må være mindre end 12 %. Det anbefales at anvende stål eller et andet godkendt duktilt materiale, som overholder de nævnte specifikationer. Drejer det sig derimod om dele med små spændinger, kan gråt støbejern accepteres som materiale, men dog kun ved særlig omtanke.
Design Designmæssigt er der i regulativerne foreskrevet, hvilke overvejelser og dele der skal godkendes af en 3. part. Som udgangspunkt skal konstruktionen konstrueres således, at spændingskoncentrerede områder undgås. Alle svejsninger på konstruktionen bør også kontrolleres og godkendes. Alle kom-ponenter, som ikke har en buffer i forhold til belastninger, skal mindst have en styrke tilsvarende rorstammens. Sikkerhedsfaktoren, der regnes med i dette projekt, er angivet fra DNV til at være 2 (se bilag 1).

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 7 Kapitel 2 Analyse
2.4 Materialer i systemet
Støbning Da det er et krav fra Scan Steerings side, at tilleren skal støbes, beskrives her nogle grundlæggende principper om støbning. Kravet kan begrundes med, at der ses på kompromiset mellem økonomi og den komplekse udformning af tilleren. Umiddelbart kan en kompleks udformning i kraftige materia-ler koste mange smedetimer. Forarbejdet ved en støbning består bl.a. af at konstruere en god form, hvor der tages højde for flere detaljer. En mulig metode for at konstruere formen vil være at udforme tilleren i voks. Uden-om voksen kan støbeformen derefter bygges op af sand. Ved fremstilling af større emner er støbe-sandet typisk med sten op til 6 mm og bundet med olie. Støbeformen skal så opvarmes, og under denne opvarmning smelter voksen og løber ud af støbeformen. Ved opvarmningen størkner sandet til en mere fast og sprød masse, som herefter kan holde til selve støbningen. En støbeform til et stør-re og kompliceret emne kræver ofte flere indløb for at opnå en god fordeling af støbemassen. Det betyder også, at der skal bruges mere støbemasse end emnets volumen. Dette ekstra volumen af støbemasse kan dog nemt anvendes igen ved nedsmeltning til en anden støbning. Efter støbningen og afkølingen af emnet kan sandformen bankes af i flager med en hammer.
Støbestål eller støbejern som materiale til projektet Ved at anvende samme materiale til de dele der bevæger sig op af hinanden, kan slid mellem delene reduceres. Dette er muligt, fordi overfladerne, som skal overføre kræfterne, kan fræses, så der opnås meget fine overfladeruheder mellem delene. Fine og ens overfladeruheder på delene vil sammen med smøring give tilstrækkelig levetid, fordi betingelserne for abrasionsslid og tribo-oxydation fjernes [7.1]. Støbestål og støbejern er begge mulige materialer til tiller og glidere. Det er fordi, tillerens di-mensioner og komplekse geometri betyder, at støbning er den mest fornuftige fremstillingsmetode. Når et emne støbes, elimineres kritiske og svage punkter, som kan opstå ved boltede eller svejste samlinger. I dette kapitel vil det derfor blive gennemgået, hvordan støbestål og støbejern egner sig som materiale til tilleren og gliderne. I afsnittet 2.3 blev det gennemgået, hvilke specifikationer der skal gælde for materialet til tille-ren. Derfor vil støbestål og støbejern blive vurderet i forhold til en trækstyrke på mindst 650 , en brudforlængelse på mindst 12 % og en legeringssammensætning med mindst 12 % krom.
Anvendelige egenskaber Som udgangspunkt ønskes det, at få fastlagt om støbestål og støbejern er anvendelige materialer til maritime opgaver, og om de kan overholde de i miljøanalysen beskrevne påvirkninger. Anvendelig-heden afhænger af indholdet af krom da der ønskes et korrosionsbestandigt materiale. Ved en lege-ringssammensætning hvor der er 12 % krom eller derover, vil støbestål være rustfrit og dermed vel-egnet som materiale. Dette gælder dog ikke for støbejern, hvor det ikke har været muligt at finde en legeringssammensætning med 12 % krom, hvorfor støbejern ikke er et egnet som materiale til tille-ren. Støbestål har et kulstofindhold på 1,2 %, hvorimod støbejern har et kulstofindhold på mere end 2 %. Støbestål er samtidig stærkere end støbejern, og kan derfor klare store statiske og dynamiske påvirkninger. Derfor anvendes støbestål typisk i større maskinelementer, som kræver god styrke og sejhed [8.1].

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 8 Kapitel 2 Analyse
Endeligt valg af materiale til tilleren og gliderne Som materiale til tilleren overholder støbestål regulativerne, og det opfylder kravene fra miljøanaly-sen. Derfor vælges et materiale med de nedenstående specifikationer (se tabel 1):
Tabel 1 - Specifikationer over rustfrit stålstøbegods med 12 % krom [9.1]
Betegnelse Trækstyrke Flydespænding Brudforlængelse CA-40 690 MPa 485 MPa 15 %
Da der ønskes et materiale med god korrosionsbestandighed på grund af de maritime forhold, er der kigget specifikt på de korrosionsbestandige støbestål. CA-40 har et krom-indhold på 11,5-14 %. For at sikre minimal sprødhed er der også valgt et materiale, som har et lavt indhold af silicium på 1 %.
Materiale til rorstammen Til rorstammen skal der anvendes rustfrit stål af typen AISI 316. Dette er først og fremmest vigtigt i forhold til korrosion i det krævende havmiljø. AISI 316 er austenitisk, hvilket betyder, at de me-kaniske egenskaber bevares ved lave temperatu-rer. Det lave kulstofindhold på ned til 0,03 % gi-ver gode bearbejdningsbetingelser. Som det ses på figur 6 har AISI 316 stål meget god resistens mod pitting. Hvis der skal opstå pitting, kan det kun ske ved en vandtemperatur på over 40 ºC.
Tabel 2 - Her ses data til AISI 316 [10.1]
Densitet Trækstyrke Flydespænding E-modul 8000 kg/m3 586 MPa 228 MPa 190 GPa
Figur 6 - Her ses kritisk pittingtemperatur, hvor den øver-ste stiplede linje repræsenterer AISI 316 stål [7.2]

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 9 Kapitel 2 Analyse
2.5 Læringsmål Da projektet er valgt ud fra, at skulle opfylde læringsmålene i studieordningen, gengives de vigtig-ste her. Rapporten skal indeholde beregninger på et sammensat dynamisk påvirket maskinsystem. Disse beregninger skal benyttes til at vise spændinger i konstruktionen over en tidsperiode, men skal også vise, at maskinsystemets levetid vil være tilstrækkelig, når der tages højde for udmattelse. Ud fra Scan Steerings oplæg vurderes det, at et sammensat maskinsystem som en styremaskine vil opfylde studieordningens krav. Der findes flere krav i studieordningen, men det er på baggrund af de nævnte beregninger, som vurderes til de væsentligste, at styremaskinen vil opfylde projektkrave-ne.
2.6 Problemformulering Hvordan videreudvikles en grundlæggende idé for en fire-stemplet styremaskine til et holdbart sammensat maskinsystem, som skal være robust og holde til store belastningsændringer? Ved en gennemgang af dette spørgsmål skal rapporten belyse, hvilke metoder der kan anvendes til at løse problemstillingen samt det i indledningen formulerede initierende problem. Igennem rapportens løsningsafsnit vil der redegøres for alle dimensioner, som vurderes til at være af afgørende betydning for styremaskinens holdbarhed. Dette bliver underbygget med en be-skrivelse samt beregninger for kritiske punkter, når disse løbende bliver gennemgået i rapportens følgende afsnit. Som en afslutning på rapporten vil der vurderes på styremaskinen, og om den som helhed opfylder alle nævnte krav samt opstillede forventninger.
2.7 Problemafgrænsning Hovedfokus i projektet skal lægges på dimensionering af tilleren. Derfor skal dimensioneringer og definitioner af de andre styremaskindele laves med henblik på at opnå de nødvendige værdier til dimensioneringen af tilleren. Der vil derfor blive set bort fra detaildesignet af de enkelte maskinde-le, som kun vil blive behandlet i det omfang, der er nødvendigt. De specifikke afgrænsninger i beregninger og vurderinger af værdier på faktorer vil blive be-skrevet i de enkelte afsnit, hvor dette kan være nødvendigt.

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 10 Kapitel 2 Analyse
2.8 Kravspecifikation Der er som nævnt i indledningen opstillet krav fra Scan Steering, som styremaskinen skal overhol-de. I analysen er der fundet yderligere betingelser, der skal opfyldes, for at styremaskinen vil kunne godkendes til brug ved international sejlads. Kravene deles op i primære og sekundære krav. De primære krav skal opfyldes, mens de sekundære krav ønskes opfyldt. Da Scan Steering i dette pro-jekt fungerer som kunde, er samtlige krav fra Scan Steering primære. Primære krav:
Styremaskinen skal passe til et 200 m containerskib Styremaskinen skal opfylde relevante krav fra DNV, IACS og IMO Roret skal kunne dreje fra 35 º bagbord til 35 º styrbord og omvendt på 28 sekunder I nødstilfælde med to hydraulikcylindre skal roret kunne drejes til 15 º ved 7 knob Styremaskinen skal følge Scan Steerings designoplæg Der skal være plads til at servicere bærelejet uden at demontere tilleren Styremaskinen skal være todelt for at forbedre resultatet af monteringen på værftet Tilleren skal støbes Styremaskinen skal udføres så kompakt som mulig
Sekundære krav:
Simpel og kendt teknologi skal anvendes for at sikre god og nem vedligeholdelse God beskyttelse af udsatte dele

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 11 Kapitel 3 Kræfter på roret
3 Kræfter på roret Kraftsituationen på roret vil være meget kompleks at fastlægge. Dette skyldes, at kræfterne har mange forskellige oprindelser. Derudover vil der være vekselvirkning mellem de forskellige kræf-ter, og samtidig vil forskellige skibes strømfelter kunne påvirke hinanden. Derfor vil man typisk fastlægge kræfterne ved et modelforsøg i en tank [11.1]. Dette er naturligvis ikke muligt for dette projekt. Samtidig vil nogle af kræfterne være afhængige af forskellige udformningsfaktorer, der heller ikke vil være mulige at fastlægge i dette projekt, da der ikke foreligger et færdigt skibsdesign. Der regnes derfor med den tilnærmelse, at den absolut største kraft på roret vil komme fra skruen, som sidder umiddelbart foran roret. Selve kraftberegningen er afhængig af empiriske faktorer og værdier. Disse er til en vis grad fastlagt ud fra førnævnte modelforsøg. I de tilfælde, hvor de empiri-ske værdier bunder i form- og størrelsesforhold, anvendes værdierne, der er opgivet i beregningsek-semplet for et skib, der ligner de fysiske mål, som anvendes i projektet. Beregningen følger eksem-pel 16.4.2 [11.2]. Selve beregningen tager udgangspunkt i roret som en plade uden tykkelse. Det er tidligere fastlagt, at roret er et trapezformet spaderor. Beregningen foretages derfor i et plan, der gennemskærer det tredimensionelle ror, og samtidig ligger i centrum af rorstammen og massemidt-punktet.
Der regnes med følgende mål for skibet: Skibets længde i vandlinjen: 푙 = 195 푚 Fugtet overfladeareal: 푆 = 5500 푚 Skruediameter: 푑 = 6 푚 Skibets tophastighed: 푣 = 25 푘푛표푏
Figur 7 - Viser roret set fra oven. På tegningen ses det anvendte beregningsplan, samt de afstande der er relevante for kraftberegningen.

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 12 Kapitel 3 Kræfter på roret
Der regnes med en omregningsfaktor på ,,
hvilket giver [11.3]:
Skibets tophastighed: 푣 = 25 푘푛표푏 ∗ ,,
= 12,86 Rorets areal: 퐴 = 24,26 푚 Rorets højde: ℎ = 5,5 푚 Rorets toplængde: 푙 = 5,3 푚 Rorets bundlængde: 푙 = 3,5 푚 Rorets sideforhold [11.4]:
푆 =ℎ퐴 =
(5,5 푚)24,46 푚 = 1,247 (ퟑ.ퟏ)
Der regnes med værdierne for saltvand ved 0 °C, hvilket giver følgende værdier [11.5]: Densitet: 휌 , ℃ = 1028 Kinematisk viskositet: v , ℃ = 1,83 ∗ 10 For at regne kraften, der påvirker roret, anvendes [11.4]:
퐹 =12 ∗ 휌 ∗ 푉 ∗ 퐴 ∗ 2휋 ∗
퐶 ∗ 푆푉 + 푆 + 4
∗ 훿 (ퟑ.ퟐ)
Hvor: 휌 er saltvandets densitet Vror er den halve hastighedstilvækst i skrueplanet Aror er rorets areal Cth er belastningsgraden Sror er rorets sideforhold h er rorets højde VA er tilstrømningshastigheden 훿 er rorvinklen i radianer For at udregne den halve hastighedstilvækst i skrueplanet (Vror) er det nødvendigt at udregne flere andre faktorer. Dette skyldes, at Vror er defineret som [11.6]:
푉 = 푉 ∗12푢 = 푉 1 +
12 ∗
푢푉 (ퟑ.ퟑ)

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 13 Kapitel 3 Kræfter på roret
Hvor leddet er empirisk, og er defineret som [11.6]:
푢푉 = −1 + 1 + 퐶 (ퟑ.ퟒ)
Belastningsgraden Cth er defineret som [11.6]:
퐶 =푅
12 ∗ 휌 ∗ 푉 ∗ 휋
4 ∗ 푑 (ퟑ.ퟓ)
Hvor: R er slæbemodstanden Tilstrømningshastigheden VA er defineret som [11.7]:
푉 = 푣 ∗ (1 −푤) (ퟑ.ퟔ) Hvor: 푤 er modstrømskoefficienten 푣 er skibets hastighed gennem vandet Modstrømskoefficienten er en tabelværdi, der er afhængig af flere form- og størrelseskoefficienter på skibsskroget. Derfor er det ikke muligt at fastsætte denne præcist for dette projekt. Der regnes derfor med den tilnærmede værdi, der anvendes i bogens eksempel [11.2]. Herfra fås [11.8]:
푤 = 0,29 Slæbemodstanden R er defineret som [11.1]:
푅 =12 ∗ 휌 ∗ 푣 ∗ 퐶 ∗ 푆 (ퟑ.ퟕ)
Hvor: CT er den totale friktionsmodstand Den totale friktionsmodstand CT er defineret som [11.9]:
퐶 = 퐶 + (1 + 푘) ∗ 퐶 + 퐶 (ퟑ.ퟖ) Hvor: CR er restmodstandskoefficienten k er formfaktoren CF er friktionsmodstandskoefficienten CA er ruhedstillæget

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 14 Kapitel 3 Kræfter på roret
Restmodstandskoefficienten CR er defineret som [11.10]:
퐶 =푅
12 ∗ 휌 ∗ 푉 ∗ 푆
− (1 − 푘) ∗0,075
(log(푅푒 )− 2) (ퟑ.ퟗ)
Hvor: Rtm er slæbemodstanden målt i modelforsøg 푉 er modellens hastighed Sm er modellens våde overflade Rem er Reynoldstallet for modelforsøget Som det ses, udregnes CR ved hjælp af værdier, der er målt i et modelforsøg. Koefficienten betegner modstanden, der fremkommer ved bølgedannelse. Da disse målinger ikke kan foretages, og det an-tages, at modstanden på grund af bølgevirkninger i den kraftige skruestrøm er minimal, ses der bort fra denne. Formfaktoren k bestemmes ud fra modelforsøg ved meget lave hastigheder. Faktoren er dog nor-malt lig med 0,1, hvorfor denne værdi anvendes i projektet. Friktionsmodstanden CF er defineret som [11.9]:
퐶 =0,075
(log(푅 )− 2) (ퟑ.ퟏퟎ)
Hvor: Re er Reynoldstallet Ruhedstillægget CA beregnes ud fra ruhedsfaktorer over hele skibet og er defineret som [11.9]:
퐶 = 105푘푙 − 0,64 ∗ 10 (ퟑ.ퟏퟏ)
Hvor: ks er en middelruhed for skibsskroget Middelruheden ks er ikke kendt. I dette tilfælde anvendes dog en standardværdi på 150 ∗ 10 푚. Reynoldstallet Re er defineret som [11.1]:
푅 =푣 ∗ 푙
v , ℃ (ퟑ.ퟏퟐ)
Ved hjælp af alle disse faktorer kan kraften på roret beregnes. Det ønskes imidlertid at opskrive en funktionsforskrift, der er afhængig af vinkeldrejningen som funktion af tiden. Derfor skal leddet 훿 = 훿(푡) udregnes. Det er et krav, at roret skal kunne bevæge sig fra 35 ° bagbord på 35 ° styrbord på 28 sekunder. Det er ønskeligt, at bevægelsen skal ske så jævnt som muligt, hvorfor det fastlæg-

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 15 Kapitel 3 Kræfter på roret
ges, at bevægelsen fra 35 ° styrbord til 0 ° skal tage 14 sekunder. Ud fra disse antagelser kan rand-betingelserne for funktionsforskriften opskrives. Det antages, at bevægelsen beskrives af en cosi-nus-funktion, således at den kan beskrive bevægelsen kontinuerligt over tid:
훿(푡) = cos(휔 ∗ 푡) (ퟑ.ퟏퟑ) Der opstilles to randbetingelser:
훿(0) =35휋180 푟푎푑
훿(14) = 0 푟푎푑 Idet 훿(0) = 1 skal kurven parallelforskydes langs y-aksen. Dette gøres ved at indføre 훿(푡) = ∗cos (휔 ∗ 푡). På denne måde sikres det, at kurven får toppunkt i 35 ° til tiden 0 sekunder. Herefter opstilles ligningen:
훿(14) =35휋180 ∗ cos(휔 ∗ 14) = 0 → 휔 =
휋28 (ퟑ.ퟏퟒ)
Dermed opnås funktionen, der beskriver den ønskede bevægelse:
훿(푡) =35휋180 ∗ cos
휋28 ∗ 푡 (ퟑ.ퟏퟓ)
Figur 8 - Viser kurven for delta(t). Det ses, at funktionen er symmetrisk omkring x-aksen. Fortegnet betegner de modsatvirkende retninger af roret i henholdsvis styrbord og bagbord. Derudover er der maxværdier i t=0 og t=28. Her er værdien jævnfør randbetingelserne delta(0)=(35pi/180) rad og delta(28)=(-35pi/180) rad

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 16 Kapitel 3 Kræfter på roret
Dette funktionsudtryk indsættes derefter i kraftberegningen:
퐹 =12 ∗ 휌 ∗ 푉 ∗ 퐴 ∗ 2휋 ∗
퐶 ∗ 푆푉 + 푆 + 4
∗ 훿(푡) (ퟑ.ퟏퟔ)
Herefter beregnes kraften på roret. Det antages, at den største kraft vil forekomme på roret, når ski-bet sejler i topfart med roret slået ud i 35 °. Dette understøttes også af, at 훿(푡) er numerisk maksi-mal i punkterne 0 og 28 sekunder, når roret står i henholdsvis 35 ° styrbord eller 35 ° bagbord. Det er denne kraft, der her beregnes for at finde det maksimale moment, der kan påføres rorstammen, og som dermed overføres til styremaskinen. Reynoldstal:
푅 =푣 ∗ 푙
v , ℃=
12,86 푚푠 ∗ 195 푚
1,83 ∗ 10 ms
= 1,37 ∗ 10 (ퟑ.ퟏퟕ)
Friktionsmodstanden:
퐶 =0,075
(log(푅 )− 2) =0,075
(log(1,37 ∗ 10 ) − 2) = 1,47 ∗ 10 (ퟑ.ퟏퟖ)
Ruhedstillægget:
퐶 = 105150 ∗ 10 푚
195 푚 − 0,64 ∗ 10 = 3,22 ∗ 10 (ퟑ.ퟏퟗ)
Den totale friktionsmodstand:
퐶 = (1 + 0,1) ∗ 1,47 ∗ 10 + 3,22 ∗ 10 = 1,94 ∗ 10 (ퟑ.ퟐퟎ) Slæbemodstanden:
푅 =12 ∗ 휌 ∗ 푣 ∗ 퐶 ∗ 푆
=12 ∗ 1028
푘푔푚 ∗ 12,86
푚푠 ∗ 1,94 ∗ 10 ∗ 5500 푚 (ퟑ.ퟐퟏ)
= 9,08 ∗ 10 푘푁 Tilstrømningshastigheden:
푉 = 푣 ∗ (1− 푤) = 12,86 푚푠 ∗
(1− 0,29) = 9,13 푚푠 (ퟑ.ퟐퟐ)

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 17 Kapitel 3 Kræfter på roret
Belastningsgraden:
퐶 =푅
12 ∗ 휌 ∗ 푉 ∗ 휋
4 ∗ 푑=
9,08 ∗ 10 푁12 ∗ 1028 푘푔푚 ∗ 9,13 푚푠 ∗ 휋
4 ∗ (6 푚)= 0,7495 (ퟑ.ퟐퟑ)
Den empiriske - værdi:
푢푉 = −1 + 1 + 퐶 = −1 + 1 + 0,7495 = 0,3227 (ퟑ.ퟐퟒ)
Den halve hastighedstilvækst i skrueplanet:
푉 = 푉 1 +12 ∗
푢푉 = 9,13
푚푠 ∗ 1 +
12 ∗ 0,3227 = 10,60
푚푠 (ퟑ.ퟐퟓ)
Rorvinklen i radianer:
훿(0) = 0,6109 Dermed kan den maksimale kraft på roret beregnes. Formlen er empirisk, og der ses derfor bort fra de inkonsistente enheder. Resultatet angives derfor blot i 푁푒푤푡표푛:
퐹 =12 ∗ 휌 ∗ 푉 ∗ 퐴 ∗ 2휋 ∗
퐶 ∗ 푆푉 + 푆 + 4
∗ 훿(푡)
=12 ∗ 1028
푘푔푚 ∗ 10,60
푚푠 ∗ 24,26 푚 ∗ 2휋 ∗
0,7495 ∗ 1,247
9,13 푚푠 + 1,247 + 4∗ 0,6109 (ퟑ.ퟐퟔ)
= 437,70 푘푁
Da kraften virker i massemidtpunktet, skal afstanden fra dette til centrum af rorstammen fastlægges. Da massemidtpunktet ligger i midten af den trapezformede plade, og centrum af rorstammen ligger i 1/3 af rorets toplængde, må afstanden være (se figur 7):
푟 =12 ∗ 푙 −
13 ∗ 푙 =
16 ∗ 5,3 푚 = 0,883 푚 (ퟑ.ퟐퟕ)
Dermed bliver det maksimale moment, der kan påvirke rorstammen:
푀 = 퐹 ∗ 푟 = 437,70 푘푁 ∗ 0,883 푚 = 386,64 푘푁푚 (ퟑ.ퟐퟖ)

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 18 Kapitel 3 Kræfter på roret
Som det ses af førnævnte beregninger, bliver momentet, der påvirker rorstammen, en funktion af tiden i sekunder for drejningen og hastigheden på skibet i knob. For at vise sammenhængen mellem moment, tid og hastighed plottes funktionen i Matlab (se figur 9). Hele Matlabprogrammet kan ses i appendiks 1 på side 73.
Følsomhed for parametrene For at undersøge hvor realistisk beregningen er, vurderes der her, på de tilnærmelser der er lavet. Modstandskoefficienten kan ikke fastlægges præcist, men her vil følge en kort oversigt over, hvad en variation på 20 % af modstandskoefficienten vil betyde for det samlede moment på rorstammen. Denne variation vil give en relativ god oversigt over, hvor følsom momentberegningen er overfor ændringer i modstandskoefficienten. Først kigges der på en modstandskoefficient, der er 20 % mindre end den anvendte:
푤 , = 0,8 ∗ 0,29 = 0,232 (ퟑ.ퟐퟗ) Det giver et moment i rorstammen på:
푀 푤 , = 350,10 푘푁푚
Figur 9 - Viser plottet af momentfunktionen fra Matlab. Til tiden 0 sek. står roret i 35 grader og til tiden 28 sek. står roret 35 grader modsat. Derfor kan momentet i plottet aflæses til negative værdier i det blå område

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 19 Kapitel 3 Kræfter på roret
Det giver en procentmæssig afvigelse på:
퐴푓푣푖푔푒푙푠푒 =386,64 푘푁푚− 350,10 푘푁푚
386,64 푘푁푚 ∗ 100% = 9,45 % (ퟑ.ퟑퟎ)
Derefter kigges der på en modstandskoefficient, der er 20 % større end den anvendte:
푤 , = 1,2 ∗ 0,29 = 0,348 (ퟑ.ퟑퟏ) Det giver et moment i rorstammen på:
푀 푤 , = 432,07 푘푁푚 Det giver en procentmæssig afvigelse på:
퐴푓푣푖푔푒푙푠푒 =432,07 푘푁푚− 386,64 푘푁푚
432,07 푘푁푚 ∗ 100% = 10,5% (ퟑ.ퟑퟐ)
Det ses dermed, at beregningen er mere følsom for større modstandskoefficienter end for mindre. Det vurderes dog, at den udregnede afvigelse er acceptabel i dette projekt, idet virkningen kun er cirka 50 % af ændringen. Den anden tilnærmelse, der er lavet i beregningen, er, at der ses bort fra restmodstandskoefficienten. Dette gøres ud fra den betragtning, at der ved høje hastigheder vil være en meget lille bølgepåvirk-ning af roret, idet der vil være en meget kraftig skruestrøm omkring roret. Ved lavere hastigheder vil bølgepåvirkningen naturligvis være større. Dette skyldes, at restmodstanden er afhængig af Rey-noldstallet og dermed hastigheden af skibet. Men da bølgepåvirkningen ikke kan fastlægges, ses der bort fra dette.

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 20 Kapitel 4 Rorstammen
4 Rorstammen I følgende afsnit vil rorstammen blive dimensioneret. Rorstammen skal overføre torsionskraften fra tilleren til roret og dermed dreje roret. Det er derfor væsentlig at sikre, at rorstammen bliver korrekt dimensioneret, så den kan holde til momentet fra roret, men også give en minimal bøjning for at holde roret på sin position. I kapitel 3 er det blevet fastlagt, at der virker en kraft i rorets massemidtpunkt, som resulterer i et drejningsmoment omkring rorstammen. Disse informationer skal bruges til at lave en statisk analyse af rorstammen og dermed sikre den korrekte dimensionering.
4.1 Statisk analyse af rorstammen På figur 10 er det illustreret, hvordan rorstammen er monteret i to lejer. Kraften på rorets massemidtpunkt kan flyttes i angrebsli-nien til rorstammens centrum. Her vil kraften virke som en enkeltlast på rorstammens cen-trum og dermed skabe en nedbøjning på rorstammen, hvorfor det skal sikres, at begge lejer kan optage radielle bevægelser. Det øverste leje (A) skal bære rorstammen, hvor-for det er vigtigt, at netop dette leje også kan optage aksielle bevægelser.
For at simplificere situationen til videre statisk analyse er rorstammen skitseret i figur 11 som en simpelt understøttet bjælke. Rorstammen vil blive betragtet som en aksel med to lejer, hvor punkt A er det bærende leje, som kan optage aksielle og radielle be-vægelser, og punkt B, som er et glideleje, der kan optage radial bevægelse. I fritlegemedia-grammet virker kraften, der er flyttet fra ro-rets massemidtpunkt, som en enkeltlast for enden af rorstammen.
Den statiske analyse viser, at det kritiske punkt ligger i punktet B med et bøjningsmo-ment på 푀 , = −437,7 ∗ 10 푁푚푚. Rorstammen skal have en sikkerhedsfaktor på 2. Diameteren kan altså varieres med hen-blik på at finde den dimension, der overhol-der kravet om en sikkerhedsfaktor på 2. Den nedenstående beregning er altså derfor ude-lukkende en beskrivelse af fremgangsmeto-den, og diameteren er fundet til 380 mm. Beregningen er lavet i Excel, og kan ses i appendiks 2.
Figur 11 - Viser fritlegemediagrammet for beregningen af rorstammen. Kraften F er påsat i bunden hvor roret er fast-gjort. Mens tilleren starter til venstre for bærelejet A i afstan-den l. Længden l er 0,5 m
Figur 10 – Viser hvordan de lejer, rorstammen er monteret i, er placeret

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 21 Kapitel 4 Rorstammen
4.2 Spændingsanalyse Med det fundne bøjningsmoment kan bøjnings-spændingen i det kritiske punkt B findes:
휎 =푀 , ∙ 푟
퐼 (ퟒ.ퟏ)
Hvor: 푀 , er det maksimale bøjningsmoment om x-aksen
r er den radielle afstand fra Origo 퐼 er arealinertimomentet for et massivt cirku-lært tværsnit
Arealinertimoment for et massivt cirkulært tvær-snit er defineret ved:
퐼 =휋
64 ∗ 푑 =휋
64 ∗(380 푚푚) = 1,02 ∗ 10 푚푚 (ퟒ.ퟐ)
Hvor: d er rorstammens diameter. Dette giver en bøjningsspænding på:
휎 =−437,7 ∗ 10 푁푚푚 ∙ 190 푚푚
1,02 ∗ 10 푚푚 = −81,25 푁
푚푚 (ퟒ.ퟑ)
Med et drejningsmoment på 386,6 kNm kan torsionsspændingerne findes ud fra:
휏 =푀 , ∙ 푟
퐼 (ퟒ.ퟒ)
Hvor: Mx,max er det maksimale drejningsmoment om x-aksen Ip er det polære inertimoment Det polære inertimoment for et massivt cirkulært tværsnit er defineret ved:
퐼 =휋 ∙ 푑
32 =휋 ∙ (380 푚푚)
32 = 2,04 ∗ 10 푚푚 (ퟒ.ퟓ)
Figur 12 - Viser tværsnittet af rorstammen i det kritiske punkt. Momentet Mx virker omkring centeraksen på rorstammen, og er dermed det moment, styremaskinen skal levere til roret for at dreje dette

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 22 Kapitel 4 Rorstammen
hvilket giver en torsionsspænding på:
휏 =386640645,5 푁푚푚 ∙ 190 푚푚
2,04 ∗ 10 푚푚 = 35,89 푁
푚푚 (ퟒ.ퟔ)
Da der ikke er kræfter langs rorstammen, udgår normalspændingen. Referencespændingen σref kan nu bestemmes, og sammenholdes med flydespændingen for stålet AISI 316. Referencespændingen findes ved hjælp af Von Mises formel:
휎 = 휎 + 3 ∙ 휏 = (−81,25 푁
푚푚 ) + 3 ∙ (35,89 푁
푚푚 ) = 102,30 푁
푚푚 (ퟒ.ퟕ)
Flydespændingen for AISI 316 er 228 , og sikkerhedsfaktoren bliver således:
푆 =휎휎 =
228 Nmm
102,30 푁푚푚
= 2,23 (ퟒ.ퟖ)
Dermed opfyldes sikkerhedsfaktorkravet fra DNV på 푆 ≥ 2.
4.3 Nedbøjningen For yderligere at sikre dimensioneringen beregnes nedbøjningen af rorstammen. Dette gøres via Virtuelt arbejdes princip, og der tages udgangspunkt i figur 11. Der regnes med et maksimalt bøj-ningsmoment på −437,7 푘푁푚. Dette giver en nedbøjning på:
푤 =1퐸퐼 ∗
13 ∗ 3,5 푚 ∗ (−437,7 푘푁푚) ∗ (−1 푚) +
13 ∗ 1푚 ∗ (−437,7 푘푁푚) ∗ (−1 푚) (ퟒ.ퟗ)
Der anvendes et arealinertimoment på 1,02 ∗ 10 푚푚 samt et elasticitetsmodul på 190000 MPa. Dette giver en samlet nedbøjning af rorstammen på:
푤 = 3,38777 푚푚

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 23 Kapitel 4 Rorstammen
4.4 Workbench beregninger For at understøtte de førnævnte beregninger er der i Ansys Workbench lavet spændingsanalyser. De skal være med til at sikre, at håndberegningernes resultater stemmer overens med de værdier, som kan findes i computerbaserede analyser.
Figur 13 viser en Workbench beregning, hvor der igennem en simpel bjælkemodel er fundet en bøj-ningsspænding på 81,42 . Sammenholdt med ovenstående håndberegnede resultat på 81,25
vurderes dette resultat acceptabel. For yderligere verificering ønskes at finde en reference-spænding, da der udover en enkeltkraft også er et drejningsmoment, som giver torsionsspændinger i rorstammen. Dette kan ikke gøres i bjælkemodellen, hvorfor der i en solid model er lavet yderligere en beregning. Forskellen på bjælkemodellen og solidmodellen er, at understøtningerne i bjælkemo-dellen er defineret som punkter, og i solid modellen er der tale om en decideret dimensionsovergang som set i figur 14.
Figur 14 – Viser markeringerne af dimensionsovergangene. Dimensionsovergangen er nødvendig for at kunne understøtte geometrien præcist
Figur 13 – Viser bøjningsspændingen fundet i en bjælkemodel i Workbench

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 24 Kapitel 4 Rorstammen
Solidmodellen ses på figur 15, og giver en referencespænding på 164,78 . Sammenholdt med
den fundne på 102,30 er det en forholdsvis stor afvigelse. Dette kan dog skyldes, at der i selve udformningen af rorstammen er lavet en dimensionsovergang, som skal symbolisere lejernes place-ring. I dimensionsovergangen sker en geometrisk ændring som kan være årsag til spændingskon-centrationerne illustreret i figur 16.
Figur 16 – Viser hvordan spændingerne er placeret i to vilkårlige udsnit i forhold til dimensionsovergangen i punktet B. Fremhævningen af spændingskoncentrationerne er lavet ved hjælp af Probefeaturen i Workbench
Figur 15 – Viser en analyse af den samlede referencespænding i en solid model i Workbench. Det maksimale bøjningsmo-ment findes i den understøtning, der symboliserer glidelejet

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 25 Kapitel 4 Rorstammen
I figur 17 understøttes nedbøjningen igennem bjælkemodellen i Workbench. Denne giver en ned-bøjning på 3,29 mm. Sammenholdt med den håndberegnede nedbøjning på 3,38 mm er det en ac-ceptabel afvigelse.
Samlet set kan det konkluderes, at en rorstamme med en diameter på 380 mm er tilstrækkeligt di-mensioneret i forhold til de gældende kraftpåvirkninger.
4.5 Lejer til rorstammen Som nævnt skal rorstammen monteres i et bæreleje og i et glideleje. Det skal være to forskellige lejer, fordi bæ-relejet, som skal placeres øverst på rorstammen, både skal håndtere aksielle samt radielle kræfter, mens glide-lejet kun skal håndtere radielle kræfter. Bærelejet, som kan ses på figur 18, er konstrueret til at bære den store vægt fra tilleren, rorstammen og roret. Denne store ak-sielle belastning vil slide lejet, og derfor er det et krav fra Scan Steering, at bærelejet skal kunne serviceres, hvilket betyder, at bronzepladerne skal kunne udskiftes hurtigt og nemt. Til lejet medfølger en todelt ring, som skal spændes om rorstammen og det er denne ring, som glider på bronzepladerne. Den todelte ring fremstilles også i bronze. Det vil sige, inden et service bliver det nødvendigt, at sikre tilleren og dermed rorstammen med stropper og taljer som aflastning for væg-ten, før den todelte ring kan demonteres. Ved fuld belastning er den radielle belastning fundet gen-nem en statisk beregning, som tager udgangspunkt i figur 11, til 125,06 푘푁.
푅 =437,7 푘푁푚
3,5 푚 = 125,06 푘푁 (ퟒ.ퟏퟎ)
Figur 17 – Viser nedbøjningen af rorstammen fundet i en bjælkemodel i Workbench
Figur 18 – Billede af et rorbæreleje fra Hatlapa. Her ses den ene part af den to delte presring. Lejet er samlet med bolte for nem service [12.1]

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 26 Kapitel 4 Rorstammen
For at overholde kravet med sikkerhedsfaktoren på 2 anvendes en radial belastning på 250,12 푘푁:
2 ∗ 125,06 푘푁 = 250,12 푘푁 (ퟒ.ퟏퟏ) De vigtigste informationer for et 380 mm bæreleje kan aflæses i tabel 3, og her ses det, at bærelejet kan klare en maksimal radial belastning på 570 푘푁.
Tabel 3 - De vigtigste informationer for et 380 mm bæreleje [12.1]
Bore diameter
Ydre diameter Højde Max aksial
belastning Max radial belastning Vægt
380 mm 880 mm 340 mm 1700 kN 570 kN 680 kg Glidelejet skal kun optage radielle kræfter, og kunne håndtere den beregnede maksimale kraft på 437,7 푘푁, men også her gælder en sikkerhedsfaktor på to.
2 ∗ 437,7 푘푁 = 875,4 푘푁 (ퟒ.ퟏퟐ) Mellem glidelejet og havvandet skal der monteres en dynamisk pakning, og derfor kommer glidele-jet ikke i direkte kontakt med havvandet. Begge lejer skal kobles til en automatisk smørepumpe, og smøringen skal jævnligt kontrolleres. Normalt foregår dette ved en ugentlig kontrol.
4.6 Kegleprespasning For at være sikker på, at momentet fra tilleren kan overføres til rorstammen, er det nødvendigt med en kontrolberegning. Denne beregning kan opstilles efter principper vist i Roloff Matek. En kegleprespasning vil her være en god måde at overføre momentet på, fordi belastnin-gen kan fordeles på et stort areal. Ved at an-vende en kegleprespasning undgås det, at få kærvvirkning pga. en notgang, som ellers er en typisk samlemetode for aksler. Tillerens masse vil også bruges som ekstra sikkerhed mod slip i forbindelsen. Ved denne type forbindelse skal en møtrik holde pres på samlingen. Gevindet skal skæres direkte i rorstammen, og møtrikken skal specialfremstilles. Her antages, at den statiske friktionskoeffi-cient mellem rorstammen og tilleren er 0,4. Dette er for støbejern mod stål [14.1]. Bereg-ningen laves ved at bruge nogle valgte mål, som vil passe med det ønskede design på tilleren og rorstammen. Hele beregningen, der er udført i Ex-cel, kan ses i appendiks 3. Det skal altså sikres, at prespasningen kan overføre det gældende drejningsmoment fra tilleren til rorstammen.
Figur 19 - Her ses en kegleprespasning [13.1]

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 27 Kapitel 4 Rorstammen
Vinkelen beregnes ud fra trigonometri, og gives ved [13.2]:
푡푎푛훼2 =
퐷1− 퐷22 ∗ 푙 (ퟒ.ퟏퟑ)
Hvor: D1 er den nederste diameter D2 er den øverste diameter 푙 er længden mellem de to diametre Arealet af kontaktoverfladen skal findes: [13.3]:
퐴푓 = 퐷푚퐹 ∗ 휋 ∗ 푙 (ퟒ.ퟏퟒ) Hvor: DmF er middelværdien for diameteren. Kraften FRt der virker lige i kontaktoverfladen, skal beregnes. FRt er den tangentielle kraft i kontakt-overfladen ganget med en sikkerhedsfaktor, SH, for pludselig belastning[13.4]:
퐹 = 푆 ∗푀퐷
2 (ퟒ.ퟏퟓ)
Denne kraft skal så anvendes til at finde et tryk (PFk), hvor også friktionskoefficienten(µ) mellem tilleren og rorstammen benyttes. PFk er det mindst påkrævede fælles tryk[13.3]:
푃 =퐹
퐴푓 ∗ 휇 (ퟒ.ퟏퟔ)
Nu kan faktoren ZK beregnes. ZK er et vedhæftningsmål, som skal anvendes i formlen for, hvorvidt det er muligt at overføre momentet. I formlen indgår en faktor (K), som er en hjælpestørrelse for det mindste påkrævede fælles tryk. K findes ud fra materialet og diameterforholdet mellem DmF og til-lerens ydre ringdiameter [13.6]. EA er elasticitetsmodulet for tilleren, som er den yderste del af prespasningen [13.5]:
푍 =푃 ∗ 퐷 ∗ 퐾
퐸 ∗ cos (∝2) (ퟒ.ퟏퟕ)
Når ZK er kendt, kan det maksimale moment, som kegleprespasningen kan overføre, findes. Denne formel angiver kun, om det er muligt at overføre momentet med de valgte dimensioner. Det er fordi, det nødvendige pres på samlingen først beregnes bagefter [13.7]:
푇 ≥푍 ∗ 퐸 ∗ 퐷 ∗ 휋 ∗ 휇 ∗ 푙
2 ∗ 푆 ∗ 퐾 ⇒

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 28 Kapitel 4 Rorstammen
푇 ≥ 400,041 푘푁푚 (ퟒ.ퟏퟖ)
Presset på samlingen holdes af den specialfremstillede møtrik, der skrues direkte på rorstammens gevind. Denne formel angiver den nødvendige kraft, som møtrikken skal trykke samlingen med, så momentet kan overføres. 휍 er en friktionsvinkel [13.8], og gælder for en inderdel i stål og en ydre-del i støbejern [13.9]:
퐹 ≥2 ∗ 푆 ∗ 푇퐷 ∗ 휇 ∗
sin (휍 + 훼2)
cos (휍 ) ⇒
퐹 ≥ 864,78 푘푁 (ퟒ.ퟏퟗ)
Møtrikken skal spændes med et moment, som beregnes med den netop fundne kraft samt gevinddi-ameteren. Denne formel kan anvendes, når der ønskes et resultat, som ikke tager højde for gevind-stigning og materialer. [13.10]:
푀 ≈ 0,17 ∗ 퐹 ∗ 푑 ⇒
푀 ≈ 49,98 푘푁푚 (ퟒ.ퟐퟎ) Ved en kegleprespasning er det vigtigt at efterspænde møtrikken efter den første fuldlast på syste-met. Det er nødvendigt, fordi det første vrid i samlingen giver en meget bedre pasning, og når der efterspændes, opnås en endnu stærkere samling. Dette vil i praksis gøres på værftets prøvesejlads, inden skibet overdrages til køberen.

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 29 Kapitel 5 Ansys Workbench
5 Ansys Workbench Da dette projekt er første gang, der stiftes bekendtskab med Ansys Workbench, er det vigtigt at un-dersøge, hvorvidt de analyser og beregninger, der udføres, stemmer overens med de beregninger, som programmet bruges til at understøtte. Workbench regner efter FEM (Finite Element Method). Det er vigtigt, at sammenligningen af resultaterne foregår på beregninger, der er udført under de samme forhold. Det vil ofte være et problem, at de simple håndberegninger er udført på en bjælke-model, da analysen af de færdigkonstruerede dele ofte vil blive udført i en 3D-solidmodel i Work-bench. Det skyldes, at der i den analysemodel vil blive taget hensyn til udførslen af geometrien. Det vil sige, at indvirkninger fra samlinger, geometrier og rundinger vil blive taget med i beregningen. Disse beregninger vil dog være for komplicerede og tidskrævende at lave i hånden. For at have et sammenligningsgrundlag for beregningerne vil her kort blive gennemgået de to forskellige bereg-ningsmodeller:
Bjælkemodel
Bjælkemodellen i håndberegningerne er baseret på et 2-dimensionelt fritlegeme system med 6 frihedsgrader (Degrees Of Freedom - DOF). Det skyldes, at der i hver enkelt knude er 3 DOF. Nemlig en flytning i x-retningen, en flytning i y-retningen og en vinkeldrejning (se fi-gur 20). Understøtningerne påsættes i punkter, og er dermed magen til de sædvanlige stati-ske håndberegninger.
3D-Solidmodel 3D-Solidmodellen tager, som navnet antyder, udgangspunkt i en analyse af 3D-solider. Der vil i dette system ligeledes være 3 DOF i hver enkelt knude. I dette tilfælde er det dog en flytning i x-, y- og z-retningen. Det betyder også, at 3D-Solidmodellen ikke direkte kan overføre vinkeldrejninger, som 2D-Bjælkemodellen kan. Dette problem kan dog tilnærmes ved hjælp af et fint mesh på figuren. På denne måde vil flytningerne tilnærme sig en vinkel-drejning. Begrebet mesh forklares efter denne gennemgang af beregningsmodeller. 3D-Solidmodelmetoden inddeler den tredimensionelle geometri i to forskellige solide element-typer (se figur 21). Understøtningerne påsættes i 3D, og det er derfor rent praktisk nødven-digt, at lave en lille geometriovergang på den del der skal analyseres, så understøtningerne kan placeres præcist. Denne lille geometri overgang vil give anledning til spændingskoncen-trationer, hvilket skal tages i betragtning, når resultaterne vurderes.
Figur 20 - Viser bjælkemodellen med to knudepunkter med 3 DOF i hvert og dermed 6 DOF i alt

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 30 Kapitel 5 Ansys Workbench
På samme måde som i 2D-Bjælkemodellen regner Workbench på de knuder, der kommer i de enkelte elementer. Valget af elementer foretages automatisk af Workbench, men har stor betydning for kompleksiteten af beregningen, der skal foretages. Det skyldes, at antallet af knuder hurtigt vokser ved elementantallet. Samtidig har antallet af fælles knuder og dermed fælles beregninger en stor betydning for kompleksiteten af beregningen. Som det ses på fi-gur 22, vil inddelingen i tetraeder blive væsentlig mere kompleks og med færre fælles knu-der end inddelingen i kuber. Dermed bliver beregningsbyrden tilsvarende tungere. Samtidig har udformningen af geometrien meget at gøre ved valget af elementer. Det skyldes, at de kubiske elementer ikke kan beskrive runde geometrier så godt som tetraederne. Derfor vil man ofte være tvunget til at anvende de noget mere beregningstunge tetraeder i beregnin-gerne. Det skyldes, at de geometrier der fremstilles, som ofte anvender huller, rundinger el-ler lignende skal beskrives. Her kan det dog være en fordel at differentiere sin elementtype-anvendelse således, at man kan bruge kubiske elementer, hvor det er muligt og tetraeder, hvor det kan være nødvendigt. På denne måde kan man lette beregningsbyrden en del. Det er dog nødvendigt manuelt at provokere Workbench til denne differentiering.
Figur 21 - Viser de to elementtyper, der bruges til at inddele den tredimensionelle geometri. Tetraeden til ven-stre har fire knudepunkter og dermed 12 DOF. Kuben til højre har 8 knudepunkter og dermed 24 DOF
Figur 22 - Viser elementinddelingen af en simpel bjælke i både kuber (til venstre) og tetraeder (til højre). Som det fornemmes, bliver inddelingen i tetraeder væsentlig mere kompleks end inddelingen i kuber. Elementerne har samme minimumsstørrelse (5 mm)

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 31 Kapitel 5 Ansys Workbench
Begrebet mesh er nævnt i det foregående. Ved begrebet mesh forstås netop inddelingen af 3D-geometrien i elementer til beregningen. Det er muligt at styre grovheden af det mesh, der bliver pålagt figuren. Med det menes, at man styrer på størrelsen af de førnævnte elementtyper. Måden og ikke mindst grovheden af det mesh der anvendes har stor betydning for kompleksiteten af beregnin-gen. Det skyldes, at der med et finere mesh kommer tilsvarende mange flere elementer og dermed knuder. Meshet har dog en meget stor betydning for, hvor pålidelig beregningen bliver. Det skyldes, at jo finere et mesh og dermed flere knuder man indsætter, jo nærmere kommer man på den aktuelle belastningssituation. Det betyder, at hvis man eksempelvis ønsker at undersøge spændingerne i et punkt, vil man med et finere mesh lave regression mod den aktuelle spændingssituation. Dermed bliver beregningen mere præcis. Ligesom med valget af elementtype er det også muligt at forfine meshet i enkelte punkter eller områder, hvor man måtte ønske mere præcise beregninger. På samme måde er det også her nødvendigt manuelt at provokere Workbench til denne differentiering. Dermed kan man lette beregningsbyrden uden at miste præcisionen i beregningen. I forhold til meshet og antallet af knuder bør også nævnes muligheden for at anvende midnodes. Begrebet betyder, som navnet antyder, at der indlægges en knude på midten af sidestykkerne i ele-menterne. Det betyder, at et kubeelement med midnodes giver et element med 20 knuder og dermed 60 DOF. På samme måde giver et tetraedeelement med midnodes et element med 10 knuder og dermed 30 DOF. Workbench anvender som standard midnodes, hvilket dermed giver et mere præ-cist resultat.
Finite element metoden stiller visse betingelser, for at beregningsalgoritmerne er gyldige:
Ligevægten skal automatisk være opfyldt Materialerne, der anvendes, skal være lineært elastiske dvs. Hookes lov skal være opfyldt
(휎 = 퐸 ∗ 휖) Strukturen skal være sammenhængende både før og efter deformationen
Derudover vil der i FEM fremkomme et randværdiproblem. Det betyder, at der vil forekomme spændingskoncentrationer i randbetingelserne dvs. understøtningerne og indspændingerne. FEM benytter en omskrevet version af Hookes lov som beregningsalgoritme:
[퐾]{퐷} = {푅} (ퟓ.ퟏ) Hvor: [K] er stivhedsmatricen {D} er flytningsvektoren {R} er reaktionsvektoren Der vil ikke som udgangspunkt blive gået i dybden med konstruktionen af de enkelte dele af bereg-ningsalgoritmen. Der vil blot blive givet en kvalitativ redegørelse for de enkelte dele. Stivhedsmatricen [K] opskrives på baggrund af materiale- og tværsnitsværdier. Det er nødven-digt at kende: Tværsnitsareal, arealinertimoment, elasticitetsmodul og længden af geometrien. Idet der anvendes 3D-emner, der er optegnet i Autodesk Inventor, er tværsnitsarealet, arealinertimomen-tet og længden allerede implicit givet i geometrien. Derfor skal kun elasticitetsmodulet indtastes i Workbench. Dette sker med angivelsen af materialet. Flytningsvektoren {D} indeholder flytningerne i knudepunkterne. I en 3D-solidmodel indeholder hver enkelt knude som tidligere nævnt 3 flytninger. Reaktionsvektoren {R} indeholder reaktionerne i hvert enkelt knudepunkt.

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 32 Kapitel 5 Ansys Workbench
Dermed plotter FEM de værdier, der er kendt, ind i algoritmen, og beregner efterfølgende de værdi-er, der endnu er ukendte. Som det ses af beregningsalgoritmen, bliver den beregningstung ved for-øgelse af knudeantallet. Eksempelvis vil et bjælkeelement med to knudepunkter have:
[퐾 ]{퐷 } = {푅 } Mens et enkelt kubeelement med midnodes vil have:
[퐾 ]{퐷 } = {푅 } Idet det tidligere blev vist, at selv en simpel rektangulær bjælke indeholder mange elementer, bliver beregningen hurtigt uoverskuelig, og dermed i praksis umulig at beregne de ønskede værdier i hån-den. Derfor anvendes FEM i projektet.
5.1 Verifikation af Ansys Workbench Som tidligere nævnt er det vigtigt, at være sikker på at Ansys Workbench kan anvendes til de stati-ske beregninger i projektet. Derfor sammenlignes en håndberegning med en FEM-beregning. Der tages udgangspunkt i beregningen på rorstammen (se kapitel 4). Her ses det, at bøjningsspændingen regnet på et bjælkeelement i både Workbench og i håndberegningen afviger med 0,2 %:
퐴푓푣푖푔푒푙푠푒 ø æ =휎 , − 휎 , å
휎 ,∗ 100%
=(81,42− 81,25) 푁
푚푚81,42 푁
푚푚∗ 100% = 0,2% (ퟓ.ퟐ)
Mens afvigelsen på nedbøjningen er 2,66 %:
퐴푓푣푖푔푒푙푠푒 ø =푊 å −푊
푊 å∗ 100%
= ( , , ) ,
= 2,66% (ퟓ.ퟑ)
Disse afvigelser vurderes til at være acceptable. Det vurderes, at Workbenchberegningerne vil give et godt billede af det ønskede beregningsforlæg. Den lille afvigelse, der måtte være, vil til fulde blive optaget i de sikkerhedfaktorer, der er indlagt i projektet. Derfor anvendes Ansys Workbench som beregningsprogram i resten af projektet. Det sker, selvom det ikke altid vil være direkte muligt at overføre de to beregningstyper mellem hinanden. Derfor anvendes håndberegningerne som sim-ple overslag, mens den mere omfattende FEM-beregning anvendes til den endelige vurdering af konstruktionerne.

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 33 Kapitel 6 Tiller
6 Tiller Tidligere i rapporten er det defineret, hvilke rammer Scan Steering har opsat for designet af tilleren. Dermed ligger designet i hoveddelene fast, og der vil i dette afsnit derfor hovedsageligt blive kigget på dimensioneringen og detaljekonstruktionen af tilleren. Først vil der blive kigget på kræfterne, der påvirker tilleren. Derefter vil de kritiske punkter på konstruktionen blive udpeget og dimensioneres i forhold til de spændinger, der optræder i tværsnittet. Selve dimensioneringen laves med håndbe-regninger, og understøttes derefter med Workbench. Samtidig anvendes shape optimization funkti-onen i Workbench for at undersøge, hvorvidt der kan fjernes materiale for at gøre tilleren lettere og billigere. Ud fra de definerede rammer for tilleren optegnes et råt begyndelsesdesign (se figur 23). Tilleren er her designet med en cirku-lær centerdel, der skal monteres på rorstammen. Derudover går to sæt arme ud på hver side af tilleren. Det er imellem disse arme, gliderne, der omdanner stemplernes lige tryk til en drejning af tilleren, skal kø-re. Der placeres en glider imellem det øver-ste armpar og en glider mellem det nederste armpar på begge sider. Disse gliderpar for-bindes derefter med en lodret split, som også forbinder stempelarmen til gliderne. Der er i det indledende design set helt bort fra rundinger og udformningen til gliderne. Det eneste fastlagte mål er højden på den cirkulære del af tilleren. Denne er i pres-pasningsafsnittet fastlagt til 720 mm.
6.1 Kraftsituationen på roret Når roret drejes vil tilleren blive påvirket af kræfter. På figur 24 er kræfterne skitseret. Tilleren påvirkes af to kraftpar når den dre-jes. Disse to kraftpar virker modsat af hin-anden på to lodret parallelle tillerarmpar, og vil give anledning til bøjningsspændinger i tillerarmen. Derudover vil tilleren til enhver tid være påvirket af en fordelt last på den lyseblå cirkulære ring, der stammer fra den kraft møtrikken spænder rorstammen og tilleren sammen med. Denne kraft er ud-regnet i afsnit 4.6 til at være 865000 N. Der regnes på ekstremlasttilfældet, når roret står i 35 °, og skibet sejler med 25 knob. Det vil sige, at tilleren skal levere et moment på rorstammen på 386640646 Nmm.
Figur 24 – Viser kraftsituationen ved drejning af roret. Kræfterne fra stemplerne vil påvirke to lodret parallelle tillerarmpar på hver side af cirkelringen. Hvilken side der påvirkes afhænger af, til hvil-ken side der drejes. Selve cirkelringen påvirkes konstant af den kraft forspændingen påvirker det lyseblå areal med
Figur 23 – Viser det indledende design af tilleren. Der ses de fire tillerarmpar samt den cirkulære del til montering på rorstammen

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 34 Kapitel 6 Tiller
6.2 Dimensionering af tilleren Ud fra disse oplysninger skal tilleren dimensioneres. Denne dimensionering sker gennem flere be-regninger og tilpasninger af dimensionerne for at opnå den ønskede sikkerhedsfaktor. Da disse be-regninger principielt er ens, vises kun den endelige dimensionering her. Der regnes med en skønnet godstykkelse på cirkelringen på 125 mm. Herefter skal der fastsættes nogle karakteristiske mål, der ønskes til tilleren. De ønskede værdier er skønnet ud fra forholdsvurderinger af tilleren. Rorstam-mediameteren er tidligere udregnet til 380 mm. Der ses bort fra den koniske del af tilleren, da denne kun vil give større godstykkelse på tilleren og dermed større sikkerhedsfaktor. Rorstammediameter: 푑 = 380 푚푚 Moment i yderposition: 푀 = 386640646 Nmm Bufferafstand inderst: 푙 = 50 푚푚 Bufferafstand yderst: 푙 = 20 푚푚 Gliderlængde: 푙 = 200 푚푚 Vinkel for uddrejning: 휃 = 35 ° Godstykkelse cirkelring: 푡 = 125 푚푚 Dermed kan afstanden fra rorstammens centrum til gliderens centrum i den inderste stilling bereg-nes:
푟 =12 ∗ 푑 + 푡 + 푙 +
12 ∗ 푙
=12 ∗ 380 푚푚 + 125 푚푚 + 50 푚푚 +
12 ∗ 200 푚푚 = 465 푚푚 (ퟔ.ퟏ)
Derefter kan afstanden fra rorstammens centrum til gliderens centrum i den yderste stilling beregnes (se figur 25):
푟 =푟
cos(35°) =465 푚푚cos(35°) = 567,66 푚푚 (ퟔ.ퟐ)
Figur 25 - Viser bevægelsen af glideren skematisk. Punktet A angiver centrum af tilleren. Længden |AB| angiver afstanden fra centrum af tilleren til centrum af glideren i inderposition. Længden |BC| angiver stem-plernes vandring til vinkeldrejningen. Længden |AC| angiver afstanden fra centrum af tilleren til centrum af glideren i yderposition
DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 35 Kapitel 6 Tiller
Så kan afstanden fra rorstammens centrum til tillerens yderste punkt beregnes:
푟 = 푟 + 푙 +12 ∗ 푙 = 567,66 푚푚 + 20 푚푚 +
12 ∗ 200 푚푚 = 687,66 푚푚 (ퟔ.ퟑ)
Dermed giver det en total længde af tilleren på 1375,32 mm, og holder sig dermed inden for den krævede maksimale længde på 1500 mm. Af hensyn til simpliciteten i støbningen vælges det dog at lave længden 1380 mm. Når glideren står i sin ydre position, og tilleren skal levere det maksimale moment til rorstammen på 386640646 Nmm, kræves der dermed en kraft på:
퐹 =푀푟 =
386640646 Nmm567,66 mm = 681112,85 푁 (ퟔ.ퟒ)
Det giver en kraft på hver tillerarm på:
퐹 =퐹
푎푛푡푎푙 푡푖푙푙푒푟푎푟푚푒 =681112,85 푁
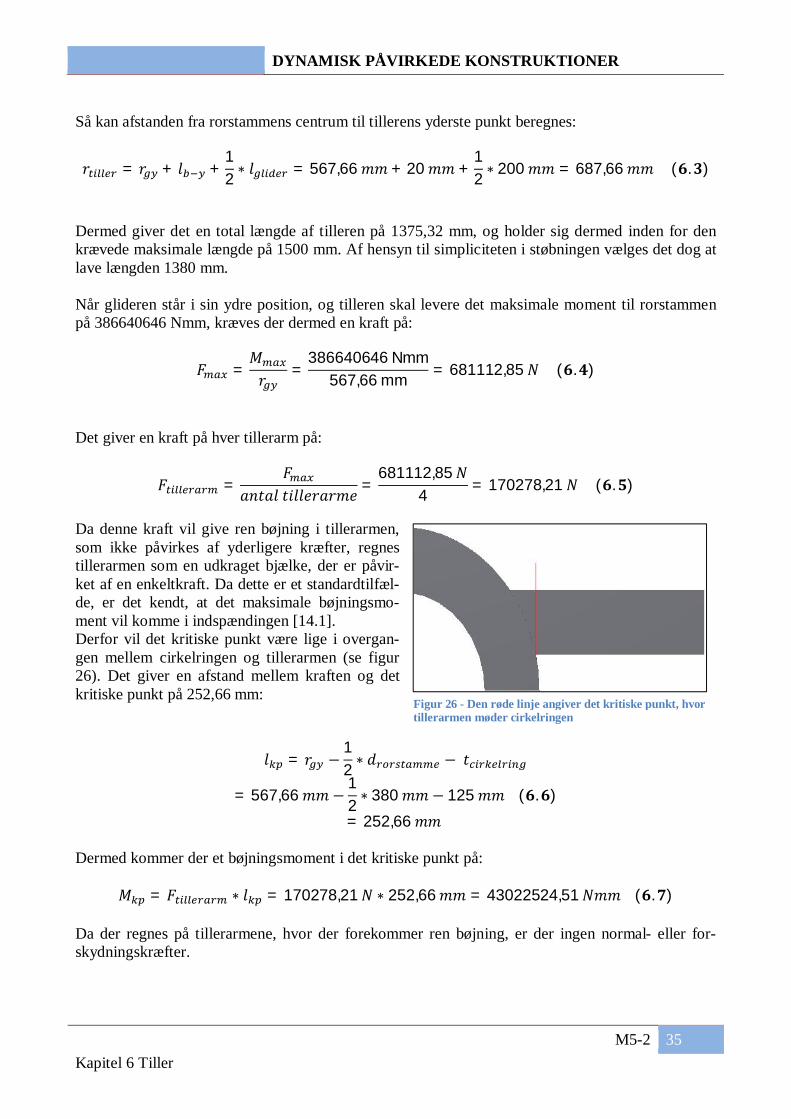
4 = 170278,21 푁 (ퟔ.ퟓ) Da denne kraft vil give ren bøjning i tillerarmen, som ikke påvirkes af yderligere kræfter, regnes tillerarmen som en udkraget bjælke, der er påvir-ket af en enkeltkraft. Da dette er et standardtilfæl-de, er det kendt, at det maksimale bøjningsmo-ment vil komme i indspændingen [14.1]. Derfor vil det kritiske punkt være lige i overgan-gen mellem cirkelringen og tillerarmen (se figur 26). Det giver en afstand mellem kraften og det kritiske punkt på 252,66 mm:
푙 = 푟 −12 ∗ 푑 − 푡
= 567,66 푚푚−12 ∗ 380 푚푚− 125 푚푚 (ퟔ.ퟔ) = 252,66 푚푚
Dermed kommer der et bøjningsmoment i det kritiske punkt på:
푀 = 퐹 ∗ 푙 = 170278,21 푁 ∗ 252,66 푚푚 = 43022524,51 푁푚푚 (ퟔ.ퟕ) Da der regnes på tillerarmene, hvor der forekommer ren bøjning, er der ingen normal- eller for-skydningskræfter.
Figur 26 - Den røde linje angiver det kritiske punkt, hvor tillerarmen møder cirkelringen

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 36 Kapitel 6 Tiller
Herefter fastsættes tværsnittet på tillerarmene. Her er lavet forskellige beregninger for at ju-stere dimensionerne således, at sikkerhedsfak-toren bliver acceptabel. Her gengives kun de endelige mål. Det ønskes af forskellige årsager at have så små dimensionsovergange som mu-ligt. Derudover giver et rektangulært tværsnit et bedre inertimoment end et kvadratisk. Der-for vælges det at lave tillerarmen med dimen-sionerne (125x110) mm (se figur 27). Da kraf-ten angriber som vist på figur 28, får tværsnit-tet højden 125 mm og bredden 110 mm. Da tværsnittet er rektangulært bliver:
푧 = ∗ ℎ = 62,5 푚푚 (ퟔ.ퟖ) Ud fra disse dimensioner kan følgende størrel-ser beregnes: Tværsnitsarealet:
퐴 æ = ℎ ∗ 푏 = 125 푚푚 ∗ 110 푚푚= 13750 푚푚 (ퟔ.ퟗ)
Tværsnittets inertimoment:
퐼 =1
12 ∗ 푏 ∗ ℎ
=1
12 ∗ 110 푚푚 ∗ (125 푚푚) (ퟔ.ퟏퟎ)= 17903645,83 푚푚
Herefter kan bøjningsspændingerne i tværsnit-tet beregnes:
휎 =푀퐼 ∗ 푧 =
43022524,51 푁푚푚17903645,83 푚푚 ∗ 62,5 푚푚 = 150,19
푁푚푚 (ퟔ.ퟏퟏ)
Da der er ren bøjning, er der ifølge Von Mises spændingstese:
휎 = 휎
Figur 27 - Viser den første dimensionering af tillerarmene
Figur 28 - Viser opbygningen af tværsnittet i det kritiske punkt. Kraften fra stemplerne angriber midt på siden b. h=125 mm, b=110 mm og z=0.5*h

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 37 Kapitel 6 Tiller
I analyseafsnittet er materialet til tilleren valgt til at være støbestål af typen CA-40, som har en fly-despænding på 휎 = 485 푀푃푎. Dermed kan sikkerhedsfaktoren mod flydning beregnes:
푆 =휎휎 =
485 푁푚푚
150,19 푁푚푚
= 3,2 (ퟔ.ퟏퟐ)
Som nævnt tidligere er disse beregninger lavet på en grov model af den endelige tiller. Disse beregninger viser dog, at grunddesig-net er dimensioneret til at kunne klare de belastninger, tilleren udsættes for i ekstrem-lasttilfældet. Derfor tilpasses designet blot for at eliminere spændingskoncentrationer så vidt som muligt ved at afrunde alle skarpe kanter til minimum radius 5 mm. Derfor er det også nødvendigt at lave en geometriæn-dring ved samlingen mellem arm og cirkel-ring for at få plads til den relativt store run-ding, der er valgt til at skulle ligge her (se figur 29). Derudover skal der laves et spor i tillerarmene, hvor gliderne skal køre. Disse spor lægges dog udenpå grunddesignet og, vil derfor ikke give anledning til et svagere design. For at kunne bestemme de øvrige mål er det nødvendigt først at fastlægge geometrien og dimensionerne på gliderne. Disse er afhængige af målene på splitten og dermed også stemplernes geometri. Derfor gennemgås disse punkter først.
Stempelarme og hydraulikcylindre Styremaskinen er en samlet enhed af mange komponenter, men hele drivkraften er hydrauliksyste-met. Hydrauliksystemet skal i dette tilfælde bestå af fire dobbeltvirkende hydraulikcylindre, som tilsammen skal dreje tilleren. Der er fra Scan Steerings side lagt op til, at hydraulikcylindrene place-res over for hinanden, fordi stempelarmene på denne måde kan forbindes for at undgå nedadhæn-gende stempelarme. Hydraulikcylindrene skal altså arbejde sammen to og to på hver side af tilleren. Det er bestemt, at hydrauliksystemet skal anvende 250 bar som arbejdstryk, da dette er en kendt og ofte anvendt standard. Fremstillingsmæssigt er der en lille problemstilling i, hvordan disse nu komplicerede stempelar-me skal konstrueres. Derfor ses her på to forskellige udvalgte løsninger:
1. Stempelarmen drejes, og fræses ud af ét stykke metal. Det vil sige, at parten indeholder armene og centerudformningen til splitten, men ikke stemplerne fordi der skal tages højde for monteringen i hydraulikcylindrene.
2. Her deles parten til tre dele. De tre dele vil være to stempelarme og et centerstykke til splitten.
Figur 29 - Viser geometriændringen, der er lavet for at kunne få plads til rundingen ved overgangen mellem cirkelring og tillerar-men. Rundingerne ved samlingen, som her er lavet røde, har en radius på 25 mm. Alle resterende rundinger er 5 mm. Ydermere ses sporet til gliderne. Den venstre tillerarm er her fjernet af illu-strative hensyn

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 38 Kapitel 6 Tiller
Her vurderes løsningerne til, at kunne udføre opgaverne lige godt i en styremaskine. Løsning num-mer to vil dog være nemmere at fremstille og samtidig gøre en eventuel udskiftning af en defekt del mindre besværlig. Derfor vælges løsning nummer to.
Dimensionering Ud fra det nødvendige moment og tillerens dimensioner kan vandring og kraft bestemmes. Som det kan ses i appendiks 3, er både vandringen og kræfter beregnet i Excel. Den fulde vandring fra 35 º til 35 º skal være 651,2 mm. Til den fulde vandring skal der i hver side lægges 300 mm til. Det er nødvendigt for at opnå nok plads til tillerarmene ved fuldt udsving. Afstanden mellem hydraulikcy-lindrene bliver:
300 푚푚 + 651,2 푚푚 + 300 푚푚 = 1251,2 푚푚 (ퟔ.ퟏퟑ) Hydraulikcylindrene er dobbeltvirkende, og derfor skal der være plads til en tilkobling for et olierør i hver ende af cylindrene. Denne ekstra plads sættes til 100 mm i hver ende af cylindrene, og det giver også plads til en buet ende, hvis producenten ønsker at have det. Stemplerne skal være 100 mm lange, så der også er plads til de dynamiske pakninger mellem stemplerne og cylindrene. Væg-gene til cylindrene skal være 10 mm og dermed kan alle mål beregnes. Hver dobbeltvirkende hy-draulikcylinder får en samlet ydre længde på 871,2 mm.
10 푚푚 + 100 푚푚 + 651,2 푚푚 + 100 푚푚+ 10 푚푚 = 871,2 푚푚 (ퟔ.ퟏퟒ) Styremaskinen bliver lige så bred som to hydraulikcylindre og afstanden mellem dem. Dette mål bliver:
871,2 푚푚 + 1251,2 푚푚 + 871,2 푚푚 = 2993,6 푚푚 (ퟔ.ퟏퟓ) Stempelarmene skal fremstilles af rustfrit stål, og have en diameter der vil give en sikkerhedsfaktor på mindst to. Ved det største moment på roret vil kraften være 170,3 푘푁 i hver stempelarm. Da der vælges et rustfrit stål, som har en flydespænding på 241 MPa, kan arealet og dermed den mindste nødvendige diameter bestemmes.
퐴 =2 ∗ 퐹휎 =
2 ∗ 170300 푁241 푀푃푎 = 1413,3 푚푚 (ퟔ.ퟏퟔ)
퐷 = 2 ∗퐴휋 = 2 ∗
1413,3 푚푚휋 = 42,42 푚푚 (ퟔ.ퟏퟕ)
Stempelarmene rundes op fra 42,42 mm til 60 mm. Denne oprunding virker stor, men der er to år-sager til oprundingen. Den første årsag er, at 60 mm er en standard for stempelarme og pakninger. 50 mm er også en standard størrelse, men kan ikke bruges, fordi stempelarmene skal samles med centerstykket vha. gevind. Hvis stempelarmene bliver 50 mm, og standard mm gevind ønskes an-vendt, skal der vælges 48 mm gevind. Med et 48 mm gevind bliver diameteren lige inden gevindet 41,866 mm, og dette er under 42,42 mm, som er det mindst tilladelige.

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 39 Kapitel 6 Tiller
Tabel 4 - Vigtige mål for 48 mm og 60 mm gevind. Alle mål er i mm [13.11]
Gevindstørrelse Bund bolt Top møtrik Bund møtrik Bor til hul 48 41,866 48,541 42,587 43 60 53,252 60,595 54,046 54,4
Som det kan aflæses i tabel 4, bliver der ved 60 mm gevind en minimum diameter på 53,252 mm. Dette giver en sikkerhedsfaktor på 3,16:
푆 =휎 퐹퐴
=241 푀푃푎
170300 푁
휋 ∗ 53,2522 푚푚
= 3,16 (ퟔ.ퟏퟖ)
Længden af stempelarmene fra stemplerne til enden af gevindet kan bestemmes, når centerstykket er udformet. Hydraulikcylindrene samt stemplerne skal bestilles fra en leverandør, og derfor ses der ikke nærmere på disse dele. Ud fra de bestemte dimensioner kan hydraulikcylindrene og stempe-larmene bestilles. Samlingen af stempler og stempelarme overlades dermed til den valgte leveran-dør. Scan Steering kan dog selv fremstille centerstykket, som skal forbinde splitten med stempelar-mene.
Centerstykket Centerstykket bliver det led, som skal overføre kræfterne fra stempelarmene til splitten. Samtidigt skal centerstykket også holde stempelarmene sammen. Splitten skal kunne dreje frit i centerstykket og sikres i den øverste glider med not, så det kun er nødvendigt med smøring i centerstykket. Derfor skal der indsættes et leje omkring splitten. Lejet vælges til et glideleje i blødt hvidmetal, og det be-tyder, at lejet vil optage snavs fra omgivelserne i stedet for splitten. Designet af centerstykket bli-ver bestemt ved, hvor nemt det kan fremstilles. Fremstillingen af centerstykket vil blive nemmest ved at anvende en fræser til ud-formningen, og der kan også sik-res fine tolerancer med en fræser. Centerstykket skal laves af rust-frit stål for at overholde kravene, som er defineret i miljøanalysen. Dimensionerne på centerstyk-ket skal holdes, så de ikke kon-flikter med tilleren og hydraulik-cylindrene under udsvinget til 35º. Det giver en højde på 100 mm. En længde på 300 mm er nødvendig for at få et 85 mm langt hul i hver ende med gevind til stempelarmene. Bredden skal være 130 mm. Smøringen mellem lejet og splitten skal ske gennem en smørenippel på hver side af centerstyk-ket. Dette er muligt med et hul i hver side af lejet og med en smørenippel skruet direkte i hvert hul. På figur 30 ses tydeligt et hul til en smørenippel, hvor der i drift skal pumpes fedt ind efter behov.
Figur 30 - Her ses et centerstykke med et gevind i hver ende til stempelarmene. Hullet til splitten er 86 mm og de 10 mm ekstra er til glidelejet, som skal sikres mod rotering med en not

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 40 Kapitel 6 Tiller
Lejet kan ikke umiddelbart bestilles, men det kan fræses af en tinlegering, der kaldes hvidmetal, som glidelejer også normalt fremstilles af [7.2]. Lejet skal ikke kunne rotere sammen med splitten, og skal derfor sikres med en not, som placeres mellem lejet og centerstykket.
Splitter Når splitterne skal dimensioneres, er der flere faktorer, der skal tages i betragtning. Da splitten bli-ver omdrejningspunkt, som hjælper med at omsætte stemplernes lineære bevægelser til drejningen af tilleren, skal splitten kunne dreje enten i gliderne eller i centerstykket på stempelarmene. I denne forbindelse vil det være vigtigt at tage højde for slid mellem de to bevægelige dele. Det er tidligere valgt, at splitten monteres i et leje i stempelarmene. Det betyder, at det er her, rotationen kommer til at foregå. Derfor vælges det at fastmontere splitterne i gliderne, så der undgås slid mellem disse dele. Dette gøres ved hjælp af en notforbindelse. Da denne på grund af lejet i centerstykket ikke bliver kraftoverførende, beregnes denne ikke. Derudover skal splitterne fastholdes aksialt, således at de ikke kan hoppe ud af gliderne. Dette gøres ved at lave et hoved på splitterne, der sikrer dem mod at falde igennem gliderne samt ved at lave splitterne en anelse længere end nødvendigt og sikre dem på undersiden med en låsering (se figur 31). Det ønskes at gøre splitterne så korte som mulige, da de vil blive udsat for ren bøjning. Derfor skal den lodrette afstand mellem tillerarmene gøres så kort som mulig. Denne afstand er styret af centerstykket på stempelarmene. Denne er tidligere fastsat til at være 100 mm høj. Derudover ind-lægges en frigang på 10 mm på hver side af centerstykket. Det vil sige, at afstanden mellem under-siden af den øverste tillerarm, og oversiden af den nederste tillerarm vil blive 120 mm. Det er disse 120 mm, der vil blive udsat for bøjning. Derfor kan splitten dimensioneres som en simpelt under-støttet bjælke. Det vælges, at splitterne skal laves i det samme materiale som gliderne og tilleren. Dette skyldes, at dette materiale har en høj flydespænding, og er let forarbejdeligt. Dette er vigtigt, idet splitterne både skal drejes og fræses. Kraftsituationen er et standardtilfælde for en simpelt understøttet bjælke, hvor den fordelte last er samlet til en punktlast i centrum af bjælken. Derudfra bliver formlen for det maksimale moment [14.2]:
푀 =14 ∗ 퐹 ∗ 푙 (ퟔ.ퟏퟗ)
Kraften, der virker på midten, er den dobbelte af den kraft, der er udregnet i tillerafsnittet til at virke på hver tillerarm. Dette skyldes, at hvert stempelpar leverer kraften til to glidere. Dermed er kraften:
퐹 = 2 ∗ 퐹 = 2 ∗ 170278,21 푁 = 340556,42 푁 (ퟔ.ퟐퟎ) Dermed bliver det maksimale moment:
푀 =14 ∗ 340556,42 푁 ∗ 120 푚푚 = 10216692,6 푁푚푚 (ퟔ.ퟐퟏ)
Inertimomentet for en aksel er defineret i kapitel 4 til at være:
퐼 =휋 ∗ 푑
64 (ퟔ.ퟐퟐ)

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 41 Kapitel 6 Tiller
Bøjningsspændingen er defineret som:
휎 =푀 ∗ 푟
퐼 (ퟔ.ퟐퟑ)
Da der er tale om ren bøjning, siger Von Mises spændingstese:
휎 = 휎 Og sikkerhedsfaktoren mod flydning er defineret som:
푆 =휎휎 (ퟔ.ퟐퟒ)
Da materialet er valgt til at være CA-40 er 휎 = 485 푀푃푎. Det ønskes, at bestemme dimensionen på splitten hvis den skal dimensioneres til at opfylde kravet om 푆 ≥ 2. Dermed omskrives på formlerne:
푆 =휎휎 ↔ 2 =
485 푀푃푎 휎 ↔ 휎 = 242,5 푀푃푎 (ퟔ.ퟐퟓ)
휎 =푀 ∗ 푟
퐼 ↔ 휎 =푀 ∗ 푟휋 ∗ (2 ∗ 푟)
64
↔ 휎 =4 ∗ 푀 ∗ 푟
휋 ∗ 푟 ↔ 푟 =4 ∗ 푀휎 ∗ 휋 ↔ 푟 =
4 ∗ 푀휎 ∗ 휋
⇒ 푟 =4 ∗ 10216692,6 푁푚푚
242,5 푁푚푚 ∗ 휋
= 37,71 푚푚 (ퟔ.ퟐퟔ)
Det vælges dog at afrunde diameteren på splitten til 76 mm. Dette giver en sikkerhedsfaktor mod flydning på 2,05. Da de øvrige geometrier på splitten ikke er udsatte for kraftpåvirkninger, sættes størrelserne på disse bare ud fra skøn (se figur 31).

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 42 Kapitel 6 Tiller
Glider For at kunne fastlægge geometrien for sporene i tillerarmene er det nødvendigt at kende glidernes ud-formning. Glidernes opgave er, at dreje tilleren idet stemplerne er fastmonterede, og derfor altid kører i en retlinet bevægelse. Bevægelsen kan beskrives ud fra en retvinklet trekant (se figur 25), og længden af gliderens vandring er beregnet tidli-gere. Her er længden på glideren desuden valgt til at være 200 mm. Glideren kommer til at være i kon-stant kontakt med tilleren, og for at undgå for meget abrasionsslid på de to dele vælges det at anvende CA-40 til glideren. Boringen i glideren er styret af splitten, og er tidligere udregnet til at være Ø76 mm. Derfor laves bredden på den rektangulære del af glideren 100 mm. Da det øn-skes, at splitten kan monteres med hånden, laves hullet i glideren og splitten til en H7/h6 pasning. I de to glidere, der skal sidde på de øverste tillerarme, fræses desuden en (10x40) mm notgang i kan-ten af hullet til montering af federen i splitten. Hullerne afrundes for at undgå skarpe kanter. Glider-ne udformes som et rektangel med to halvcirkler på siden (se figur 32).
Figur 32 - Viser tværstnittet med dimensionerne af glideren. Billedet viser de øverste glidere. I de nederste er notgangen fjernet.
Figur 31 - Viser splitten med de overordnede dimensioner. Samtidig ses federen i toppen og udfræsning til låseringen i bun-den

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 43 Kapitel 6 Tiller
Det færdige tillerdesign Efter de sidste dimensioner og udformninger er kommet på plads, kan de sidste designde-taljer på tilleren fastlægges. Som nævnt bli-ver sporet til gliderne lagt udenpå den eksi-sterende geometri. Derudover ses det, at afstanden mellem spidserne af tillerarmene skal være 100 mm, og ved splitternes dimen-sionering er det bestemt, at afstanden fra underside af den øverste tillerarm til oversi-den af den nederste tillerarm er 120 mm (se figur 33). For at understøtte designet og di-mensionerne laves der analyser i Work-bench. Først anvendes funktionen Shape optimization til at undersøge designet og dimensionerne. Denne funktion bestemmer ud fra spændingerne, hvorvidt der med for-del kan fjernes materiale, der er overflødigt. Kræfterne, der påvirker tilleren i ekstrem-lasttilfældet, er indsat, og resultatet af analy-sen kan ses på figur 34. Kraftsituationen er den samme, som er beskrevet tidligere i ka-pitlet på figur 24, og størrelsen på de rele-vante kræfter kan ses i appendiks 4. Bereg-ningen er lavet som cylindrisk fast ind-spændt. Der skal tages hensyn til, at lasttilfældet kun påvirker to lodrette armpar af gangen. Derfor kan de modsatte tillerarmspar ikke fjernes, som analysen ellers foreslår. Ydermere ses det, at der kan fjernes ganske lidt materiale fra de påvirkede tillerarme og fra cirkelringen. Dette vil dog give en meget kompliceret geometri og dermed støbeform. Derfor antages det, at der ikke med fordel kan fjernes materiale fra tilleren.
Figur 33 - Viser den endelige placering og udformning af tillerar-mene

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 44 Kapitel 6 Tiller
Herefter laves en almindelig spændingsberegning af tilleren i Workbench. Dette sker for at under-støtte de håndberegninger, der er lavet i starten af kapitlet. Det er vigtigt at huske, at håndberegnin-gerne er lavet på en meget simpel udgave af tillerarmene. I håndberegningen er der hverken taget hensyn til rundingerne af armene, udformningen af sporet til glideren og dermed den fordelte last over halvcirklen eller at armene sidder fast på cirkelringen. Det må derfor forventes, at håndbereg-ningen giver et større spændingsresultat end FEA-beregningen. Workbenchberegningen vil dermed blot understøtte, at den dimensionering, der er lavet af hele tilleren, er tilstrækkelig. Kraftsituatio-nen og laststørrelserne er de samme som i Shape Optimization beregningen, og resultatet kan ses på figur 35 og figur 36.
Figur 34 - Viser analysen af overflødigt materiale fra Workbench. Det skal tages i betragtning, at kun to tillerarmpar er belastet af gangen. Som det ses, er det ikke muligt at lave væsentlige reduceringer af materialet til tilleren uden at komplicere geometrien og dermed støbeformen

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 45 Kapitel 6 Tiller
Som forventet er spændingerne i FEA mindre end i håndberegningen. Workbench viser en maksi-mal spænding på 140,26 MPa. Til sammenligning viser håndberegningen en maksimal spænding på 150,19 MPa. Dermed ses resultatet af de foranstaltninger, der er lavet for at nedsætte spændingerne i tilleren. Det skal dog samtidigt huskes, at begge beregninger vil have problemer med spændings-koncentrationer. Derfor ville der i begge tilfælde med fordel kunne laves en hot spot analyse for at finde mere realistiske spændinger i det kritiske område. Spændingerne i begge beregninger ligger dog væsentligt under flydespændingen for CA-40. Det betyder, at der i begge tilfælde vil opnås en
Figur 35 - Viser spændingsbilledet på tilleren. Som forventet kommer spændingskoncentrationerne lige i fastgørelsen på cirkelringen. Spændingskoncentrationerne er rykket en smule væk fra cirkelringen på grund af de dimensionsovergange, der er lavet, for at kunne lave tilstrækkelige rundinger af tillerarmenes skarpe kanter
Figur 36 - Viser et closeup af det kritiske område. Som forventet er der spændingskoncentrationer i området med skarp kant og dimensionsovergang

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 46 Kapitel 6 Tiller
høj sikkerhedsfaktor. Som beskrevet er sikkerhedsfaktoren i håndberegningen 푆 , å =3,2, og sikkerhedsfaktoren i FEA vil være:
푆 , =485 푀푃푎
140,26 푀푃푎 = 3,45 (ퟔ.ퟐퟕ)
Derfor vil der i begge tilfælde være en god sikkerhed mod flydning, og en mere præcis hot spot analyse undlades derfor. Slutteligt beregnes deformationen i Workbench. Det er naturligvis vigtigt at tillerarmene ikke får en for stor udbøjning under drift. Det må dog forventes, at der med god sikkerhed mod bøjning ikke vil komme kritiske udbøjninger. Kraft- og belastningssituationen er den samme som i de andre ana-lyser. Resultatet af analysen kan ses i figur 37.
Som forventet er udbøjningen meget lille, og kan derfor negligeres. Dette resultat sammenholdt med sikkerhedsfaktorerne i både håndberegningerne og FEA leder til at konkludere, at tilleren er tilstrækkeligt dimensioneret.
Figur 37 - Viser den totale deformation af tilleren i ekstremlasttilfældet

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 47 Kapitel 7 Styring og regulering
7 Styring og regulering I dette kapitel ses der på, hvad der skal tages højde for ved den elektriske styring, og hvordan for-skellige informationsinput samles for at opnå en regulering. Maskinsystemet skal køre som et fuld-automatisk anlæg, når autopiloten slås til af styrmanden på skibets bro. Autopiloten kan til hver en tid omgås ved at dreje på en knap for at sætte en manuel kurs. Dette er ofte nødvendigt, når et andet skib skal passeres på sikker afstand. Efter den manuelle ændring og det andet skib er passeret, bliver den indlagte kurs genoptaget ved igen at slå autopiloten til. Hydraulikcylindrenes nødvendige størrelser er tidligere bestemt, og i dette kapitel ses der på hvor store oliepumper samt elmotorer, der bliver nødvendige til styremaskinen.
7.1 Samlet hydraulik Inden der ses mere på styringen, vil her bestemmes størrelsen på oliepumperne og elmotorerne, så der vil være grundlag for at bestille korrekte størrelser, der kan levere tilstrækkelige kræfter. Der skal være to oliepumper og to elmotorer til styremaskinen, fordi det vil give en sikkerhed, hvis en oliepumpe eller en elmotor svigter. Det skal altså laves som et tokredssystem, men ikke kobles sammen, så én oliepumpe leverer tryk til alle fire cylindre. Her vil oliepumperne hver især levere til et sæt hydraulikcylindre, som det ses på figur 38, hvor netop et sæt er vist. I nødstilfælde er det et krav, at en oliepumpe selv skal kunne dreje roret 15 º ved 7 knob. Ved at anvende Excel opsætnin-gen i appendiks 4 fås et moment på 36,38 푘푁푚 og dermed en kraft på 37,43 푘푁, som hvert sæt hydraulikcylindere selv skal kunne levere. En af elmotorerne skal kobles til skibets nødstrømsfor-syning. Dette betyder også, at ventilblokkene og rørføringen bliver med crossover, som fysisk bety-der, at en oliepumpe kan kobles til det andet sæt hydraulikcylindre. Oliepumpernes funktion er, at omsætte elmotorernes mekaniske energi til hydraulisk energi. Til en styremaskine, hvor skibet størstedelen af tiden sejler efter en lige kurs, og hvor der normalt kun er et lille effektbehov, vil det være en fordel at vælge en oliepumpe, som selv kan regulere flowet. Det er fordi elmotoren så kan køre i området, hvor den er mest effektiv og overlade accelerationer og hastighed til oliepumpen. Derfor skal oliepumperne bestilles til at være med variabel fortræng-ning, og de skal kunne levere 250 bar, når der er taget højde for et dynamisk trykfald i systemet. Elmotorerne skal være i stand til, at drive oliepumperne ved fuldlast, hvis der opstår en nødsitua-tion på havet. Ved normal sejlads vil kun den ene elmotor køre, og den anden stå i standby. I ap-pendiks 3 fås et volumen i hver hydraulikcylinder på 8,2 푙, og med et estimeret volumen i et rørsy-
Figur 38 - Her ses det ene sæt af hydraulikcylindrene. Ved montering er centerstykket i forvejen holdt af splitten og så kan stempelarmene trækkes frem og skrues i centerstykkets gevind. Højden fra under fødderne til centrum af stempelarmene er 250 mm

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 48 Kapitel 7 Styring og regulering
stem med pumpe og ventiler på 10 푙, kan et samlet volumen for et sæt hydraulikcylindre beregnes til 26,4 푙.
8,2 푙 + 10 푙 + 8,2 푙 = 26,4 푙 (ퟕ.ퟏ) Dette volumen skal hver oliepumpe kunne fortrænge på 28 sek. med 250 bar ved fuldlast. Den nødvendige effekt for hver elmotor kan findes, når virkningsgraden for oliepumpen samt trykfaldet for systemet kendes. Ved hjælp af et nomogram kan en effekt for hver elmotor estimeres [15.1]. Effekten for hver elmotor aflæses til 8 푘푊.
Regulering af styremaskinen Styremaskinen er sidste led i en kommandokæde af signaler fra skibets bro. Selvom skibets position kendes fra GPS, er det nødvendigt at inddrage vindforhold og afdrift fra havstrømmene i skibets kurs. Der kan spares brændstof ved at undgå unødvendig korrektion på roret og derved samtidigt tage den korteste vej fra a til b. Alle disse ting tages der højde for ved at kombinere GPS og kort-plotter i en autopilot. Autopiloten er altså en regulator for styresignalet. Signalet fra autopiloten dirigeres videre til styremaskinen via broens centrale styrepult. Den cen-trale styrepult indeholder flere ting som et rat, en lille styreknap, rorindikator, speed logger (fart gennem vandet) og nødafværgeknapper. I styremaskinrummet er der en styrestation, hvor den elektriske styring er placeret. Her er der også i nødsituationer mulighed for at anvende styremaskinen uden signaler fra broen. Der er dog en manuel telefonforbindelse mellem styrestationen og broen, som kan anvendes i nødsituationer.
Styresignaler Som standard bruges en follow up styring (fu). Det er et signal, der i dette tilfælde gives fra autopi-loten til styremaskinen, og hvor signalet skal være analogt. Signalet er typisk 0 volt, når roret ikke er drejet. Der bruges negative spændinger til udsving for styrbord og positive spændinger for ud-sving til bagbord. Signalet kan være 0,5 volt pr. grad. Det betyder, at hvis et signal på 10 volt mod-tages, så skal styremaskinen følge op, og dreje roret indtil 20 grader mod bagbord bliver opnået. Kabelføringen fra broen til styremaskinen skal dobbeltsikres ved, at to kabler udfører samme job, men kablerne trækkes fysisk ad to forskellige ruter. Ved en kabelfejl gives en alarm på skibets overvågningssystem, og fejlen kan dermed opfanges i maskinens kontrolrum samt på broen.
Figur 39 - Her ses et blokdiagram, hvor autopiloten er regulatoren i det automatiserede anlæg [16.1]

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 49 Kapitel 7 Styring og regulering
Dobbeltsikringen gælder også for den elektriske styring, og der skal derfor være to uafhængige kontrolsystemer for roret. Nogle rederier anser ikke en PLC for at være robust nok, og anvender i stedet relæteknik til kontrolsystemer for roret. Dette er oftest også nemmere at fejlfinde på samt reparere til søs. Til en normal drift kan en PLC dog lettest køre en avanceret kontinuerlig styring med forskellige accelerationer og hastigheder. Simpel relæteknik deler ofte styringen op til, at være en On/Off styring. Styremaskinen vil ikke fungere uden strøm, og derfor skal kontrolsystemerne kobles til nød-strømssystemet. Nødstrømssystemet skal kun belastes med et minimum, og derfor kobles kun det ene kontrolsystem til nødstrøm.

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 50 Kapitel 8 Lasthistorik
8 Lasthistorik For at kunne beskrive belastningerne på tilleren gennem levetiden, er det nødvendigt at opstille en lastbeskrivelse for denne. Der defineres en rute fra Esbjerg til Harwich, som inkluderer indsejling og udsejling fra havnene. Der udarbejdes en rutebeskrivelse af denne sejltur, hvor beskrivelsen vil være i hovedtræk, og hvor de mindre rutekorrektioner efterfølgende vil blive indlagt. Da beskrivel-sen af praktiske årsager kun kan defineres i hovedtræk, skelnes mellem de hastigheder som skibet sejler med. Det gøres, da der vil være forskel på antallet af korrektioner for at holde kursen i forhold til hastigheden af skibet. Disse defineres for rutefart og ind- og udsejling til at være 2 korrektioner pr. min. mellem 20 og 12 knob, mens der er 5 korrektioner pr. min. mellem 1 og 10 knob.
Esbjerg – Harwich Som forklaret vil ruterne kun blive beskrevet overordnet, ud fra de midler som har været til rådig-hed. Ruten fra Esbjerg til Harwich er optegnet efter den officielle sejlrute, og den samlede længde inkluderer indsejling og udsejling fra de to havne:
Rutens længde: ca. 630 km Indsejling Esbjerg: ca. 18 km Indsejling Harwich: ca. 16 km
Figur 40 - Oversigtsbillede for sejlruten fra Esbjerg til Harwich, der er optegnet efter den officielle sejlrute. Den total længde er på ca. 630 km inkl. ind- og udsejling til begge havne. Kortet stammer fra Google Maps

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 51 Kapitel 8 Lasthistorik
Esbjerg indsejling Indsejlingen til Esbjerg er angivet med et estimeret startpunkt, og kan derfor afvige fra virkelighe-den. Som ved den samlede oversigt er denne beskrivelse også angivet i hovedtræk, dog med speci-fikation af alle de større længder. For at kunne beskrive ruten, er den indtegnet på et søkort, som vises på figur 41.
Figur 41 – Viser en forstørrelse af indsejlingen til Esbjerg havn. Rutens startpunkt er estimeret, og kan derfor variere fra det egentlige. Kortet stammer fra Google Maps
En oversigt over længder, hastigheder og drejninger angives i tabellen herunder:
Tabel 5 - Angiver specifikationer for ruten ved indsejling til Esbjerg havn
Bevægelse Varighed 20 knob 4700 m
Drejning 5 grader 10 sek. 20 knob 2500 m
Drejning 5 grader 10 sek. 20 knob 3500 m
Drejning 10 grader 10 sek. 12 knob 780 m
Drejning 8 grader 10 sek. 10 knob 3870 m
Drejning 5 grader 10 sek. 7 knob 970 m
Drejning 5 grader 10 sek. 7 knob 520 m
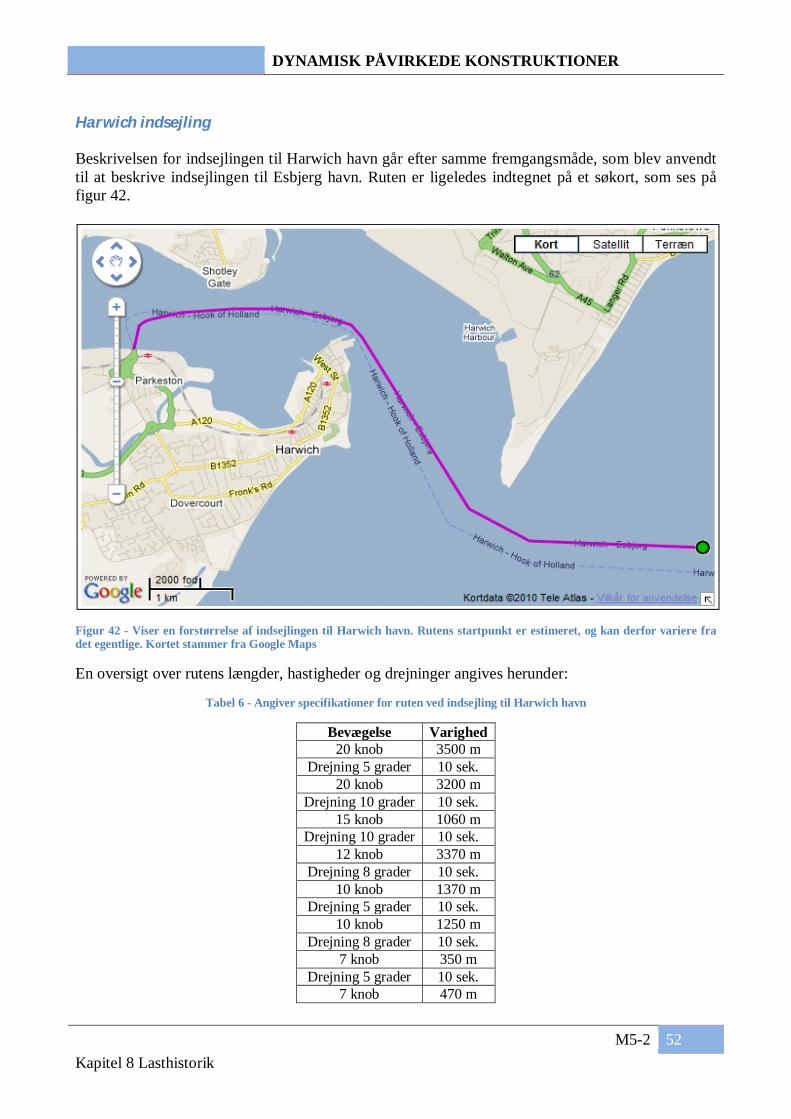
DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 52 Kapitel 8 Lasthistorik
Harwich indsejling Beskrivelsen for indsejlingen til Harwich havn går efter samme fremgangsmåde, som blev anvendt til at beskrive indsejlingen til Esbjerg havn. Ruten er ligeledes indtegnet på et søkort, som ses på figur 42.
Figur 42 - Viser en forstørrelse af indsejlingen til Harwich havn. Rutens startpunkt er estimeret, og kan derfor variere fra det egentlige. Kortet stammer fra Google Maps
En oversigt over rutens længder, hastigheder og drejninger angives herunder:
Tabel 6 - Angiver specifikationer for ruten ved indsejling til Harwich havn
Bevægelse Varighed 20 knob 3500 m
Drejning 5 grader 10 sek. 20 knob 3200 m
Drejning 10 grader 10 sek. 15 knob 1060 m
Drejning 10 grader 10 sek. 12 knob 3370 m
Drejning 8 grader 10 sek. 10 knob 1370 m
Drejning 5 grader 10 sek. 10 knob 1250 m
Drejning 8 grader 10 sek. 7 knob 350 m
Drejning 5 grader 10 sek. 7 knob 470 m

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 53 Kapitel 8 Lasthistorik
For alle rutebeskrivelser gælder det generelt, at der ikke medtages beskrivelse af havnemanøvrerin-ger. De medregnes ikke som en del af lastbeskrivelsen i dette projekt, da det vurderes, at der ikke er den store belastning af styremaskinen i disse situationer. Dette bunder i, at der til denne type ma-nøvreringer benyttes thrusters for og agter, hvilket gør, at styremaskinen ikke anvendes. Ydermere vedtages det til videre beskrivelse af belastningerne, at der regnes for positiv belastning ved drej-ning mod styrbord, og der regnes negativ, ved drejning mod bagbord. Dette gøres, da beskrivelsen af bevægelsen for styremaskinen tager udgangspunkt i 0 grader, hvor der kan drejes 35 grader til hver side.

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 54 Kapitel 9 Udmattelse
9 Udmattelse I dette kapitel regnes den definerede lastbeskrivelse om til en udmattelseslevetid. Dette gøres ved at beskrive spændingsvariationerne i det kritiske punkt, og summere alle disse bidrag med Palmgren-Miners formel.
9.1 Belastninger Fremgangsmåden for at bestemme spændingerne er først at bestemme de momenter, der virker på rorstammen. Dette gøres ved at anvende ligning (3.16), hvor de angivne hastigheder og vinkler ind-sættes. Momenterne til hver af belastningerne angives i tabel 7 herunder:
Tabel 7 - Angiver udregninger af momentbelastninger i forhold til drejning af roret, og hastigheden af skibet. Der er kun medtaget de værdier, som skal anvendes til beskrivelse af de opstillede rutekorrektioner
푀표푚푒푛푡 [푁푚] 20 Knob 15 Knob 12 Knob 10 Knob 7 Knob 1 ° 8649,19 6229,09 4775,46 3813,29 2402,54 2 ° 17298,09 - - - - 5 ° 43245,97 - - 19066,46 12012,72 8 ° - - 38203,59 30506,32 -
10 ° 86490,10 62289,58 - - - Disse momenter optræder i centrum af rorstammen, og omregnes derfor til en kraft i gliderne. Dette gøres ved at bestemme gliderens position til hver vinkel og derefter dividere momentet med denne længde. Den udregnede kraft 퐹 deles ud på hver af gliderne, og denne kraft påsættes i Work-bench analysen. Derved kan belastningerne i det kritiske punkt bestemmes til hver af bevægelserne. De udregnede størrelser er alle angivet i tabel 8.
Tabel 8 - Viser momenterne på rorstammen, bestemt i forhold til en defineret vinkel og hastighed. Disse værdier er anvendt til beregning af kraften på glideren, som også er angivet i tabellen
푽풊풏풌풆풍 [°]
푯풂풔풕풊품풉풆풅 [푲풏풐풃]
푴풓풐풓풔풕풂풎풎풆 [푵풎]
푨풓풎품풍풊풅풆풓 [풎풎]
푭풕풐풕풂풍 [푵]
푭풑풓.품풍풊풅풆풓 [푵]
1 20 8649,19 465,0708 18597,58 4649,39 -||- 15 6229,09 -||- 13393,85 3348,46 -||- 12 4775,46 -||- 10268,24 2567,06 -||- 10 3813,29 -||- 8199,37 2049,84 -||- 7 2402,54 -||- 5165,97 1291,49 2 20 17298,09 465,2834 37177,53 9294,38 5 20 43245,97 466,7762 92648,19 23162,05
-||- 10 19066,46 -||- 40847,11 10211,78 -||- 7 12012,72 -||- 25735,50 6433,88 8 12 38203,59 469,5698 81358,70 20339,67
-||- 10 30506,32 -||- 64966,53 16241,63 10 20 86490,1 472,1734 183174,45 45793,61 -||- 15 62289,58 -||- 131920,99 32980,25

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 55 Kapitel 9 Udmattelse
9.2 Workbench analyse I Workbench opstilles den situation, hvor én specifik kraft virker. Det vil sige, at der justeres løben-de på gliderens placering, så den stemmer overens med det udsving, hvor kraften virker. Dette gøres først for en vinkel på 1 grad, og når skibets hastighed er 20 knob.
Figur 43 - Viser en Workbench analyse med spændingerne i en af tillerarmene, hvor roret er i 1 grad, og skibet sejler 20 knob
Spændingsvariationerne vist på figur 43 viser en spændingskoncentration i det kritiske punkt. Kon-centrationen forekommer grundet den komplekse geometri i området, og spændingen kan derfor være besværlig at bestemme præcist. Derfor laves en hot-spot analyse for at få en repræsentativ spænding for punktet. Til dette konstrueres et koordinatsystem, hvor x-aksen angiver afstandene fra det kritiske punkt i mm, mens spændingerne listes op af y-aksen. Fra det kritiske punkt listes da spændingerne ved og ved , hvor t angiver tykkelsen af geometrien i det pågældende punkt. Der indlægges en linje gennem disse punkter, som fortsættes, indtil den krydser y-aksen, hvor spændin-gen aflæses, og anvendes i den videre udmattelsesberegning. Dette er vist på figur 44, hvor spæn-dingen er aflæst til ca. 1,80 MPa.

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 56 Kapitel 9 Udmattelse
Figur 44 - Viser spændingsvariationen fra det kritiske punkt, hvor der er indlagt punkter i t/2 og 3t/2. Ud af x-aksen haves afstandene fra det kritiske punkt i mm, og op af y-aksen haves spændingerne i MPa. Gennem disse punkter er indlagt en linje, der ved skæringen på y-aksen angiver hot-spot spændingen
Denne fremgangsmåde anvendes for hver af de belastninger, som er listet i tabel 8. Resultaterne af dette listes i tabel 9 nedenfor:
Tabel 9 - Viser spændingerne fundet ved hot-spot analyse, i det kritiske punkt ved roden af tillerarmen
Hot-spot [푴푷풂] 20 knob 15 knob 12 knob 10 knob 7 knob 1 ° 1,80 1,30 1 0,80 0,50 2 ° 3,40 - - - - 5 ° 9,30 - - 4,20 2,60 8 ° - - 8,45 6,80 - 10 ° 19,50 14 - - -
Spændingerne ønskes opstillet, så spændingernes variation kan ses i forhold til tiden. Derfor er det også nødvendigt at bestemme, hvor lang tid det tager at sejle de enkelte dele af ruten. For at gøre det nemmest omskrives hastigheden fra knob til . Derved kan længden i meter direkte omsættes til tiden i sekunder. Tiden er også vigtig i den henseende, at det i begyndelsen er defineret, hvor mange korrektioner der er i minuttet afhængig af skibets hastighed. Derfor bestemmes hastigheden først:
Tabel 10 - Omregning fra knob til m/s
20 knob 10,29 푚/푠 15 knob 7,72 푚/푠 12 knob 6, 17 푚/푠 10 knob 5,14 푚/푠 7 knob 3,60 푚/푠

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 57 Kapitel 9 Udmattelse
Ved de definerede hastigheder haves nu varigheden af de enkelte rutedele, hvorfor det nu er muligt at indlægge korrektioner på disse. Derved kan tabel 5 og tabel 6 udvides med specifikationer af be-lastninger og sejltider.
Esbjerg – Harwich belastningsbeskrivelse Turen fra Esbjerg til Harwich medtager ikke ind- og udsejling, men beskriver langt den største del af ruten. Denne tur er i alt på ca. 596 km, hvor der sejles med en konstant hastighed på 20 knob. Grundet den lange uniforme strækning er det valgt kun at beskrive et repræsentativt udsnit. Som tidsperiode vælges 1200 sekunder, og spændingerne beskrives ud fra denne. Det vurderes, at der vil forekomme korrektioner på en blanding af 1 og 2 grader med en intensitet på 2 gange i minuttet.
Tabel 11 - Angiver det repræsentative udsnit for ruten mellem Esbjerg og Harwich uden ind- og udsejlinger
Bevægelse Længde Sejltid Belastning
20 knob ~ 12346 m 1200 sek.
37 korrektioner á 1,80 푀푃푎
3 korrektioner á 3,40 푀푃푎
De 40 korrektioner fordeles som 37 korrektioner á 1 grad i 1 sek. og 3 korrektioner á 2 grader i 1 sek. Ved at indsætte disse i et koordinatsystem med tiden i sekunder ud af x-aksen, og med bøj-ningsspændinger i 푀푃푎 op af y-aksen fås følgende:
Figur 45 – Viser den repræsentative belastningshistorik over 20 minutter på ruten mellem Esbjerg og Harwich. Koordinatsy-stemet er med tiden i sekunder ud af x-aksen, og med bøjningsspændinger i N/mm^2 op af y-aksen

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 58 Kapitel 9 Udmattelse
Belastningsbeskrivelse for Esbjerg indsejling Med de fundne værdier er det muligt at fastsætte spændingsvariationen for én indsejling til Esbjerg havn. Ruten beskrives med 휎 ø i forhold til tid. Først listes de forskellige strækninger med sejl-tid ved den angivne hastighed. Dette gøres for at bestemme antallet af korrektioner:
Tabel 12 - Viser belastningshistorien fra indsejlingen til Esbjerg havn, hvor det er angivet hvilke belastninger en given bevæ-gelse giver
Bevægelse Længde Sejltid Belastning
20 knob 4700 m ~ 457 sek. 15 korrektioner á 1,80 푁/푚푚
Drejning 5 grader 10 sek. + 9,3 푁/푚푚
20 knob 2500 m ~ 243 sek. 8 korrektioner á 1,80 푁/푚푚
Drejning 5 grader 10 sek. + 9,3 푁/푚푚
20 knob 3500 m ~ 340 sek. 11 korrektioner á 1,80 푁/푚푚
Drejning 10 grader 10 sek. + 19,5 푁/푚푚
12 knob 780 m ~ 126 sek. 4 korrektioner á 1 푁/푚푚
Drejning 8 grader 10 sek. + 8,45 푁/푚푚
10 knob 3870 m ~ 752 sek. 62 korrektioner á 0,80 푁/푚푚
Drejning 5 grader 10 sek. - 4,20 푁/푚푚
7 knob 970 m ~ 269 sek. 22 korrektioner á 0,50 푁/푚푚
Drejning 5 grader 10 sek. - 2,60 푁/푚푚
7 knob 520 m ~ 144 sek. 12 korrektioner á 0,50 푁/푚푚
Efter belastningernes størrelser og varighederne af strækningerne er beregnet, kan disse indsættes i et passende koordinatsystem. Udregningen af antallet af korrektioner er bestemt ud fra tid alene, og kan derfor være sammenfaldende i et punkt, hvor der er en drejning. I en sådan situation vil der kun være en drejning angivet. Derfor kan der i visse tilfælde være en afvigelse af korrektioner, i forhold til det udregnede. Et plot af dette koordinatsystem er vist på figur 46.

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 59 Kapitel 9 Udmattelse
Figur 46 - Viser belastningshistorikken for indsejlingen til Esbjerg havn. Koordinatsystemet er med tiden i sekunder ud af x-aksen, og med bøjningsspændingerne i 푵/풎풎ퟐ op af y-aksen

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 60 Kapitel 9 Udmattelse
Belastningshistorik for Harwich indsejling Efter samme fremgangsmåde som for indsejling til Esbjerg havn er det nu muligt at beskrive indsej-lingsforløbet for Harwich havn.
Tabel 13 - Viser belastningshistorikken for indsejlingen til Harwich havn, hvor det er angivet, hvilke belastninger en given bevægelse giver
Bevægelse Længde Sejltid Belastning
20 knob 3500 m ~ 340 sek. 11 korrektioner á 1,80 푁/푚푚
5 grader 10 sek. + 9,3 푁/푚푚
20 knob 3200 m ~ 311 sek. 10 korrektioner á 1,80 푁/푚푚
10 grader 10 sek. + 19,5 푁/푚푚
15 knob 1060 m ~ 137 sek. 4 korrektioner á 1,30 푁/푚푚
10 grader 10 sek. + 14 푁/푚푚
12 knob 3370 m ~ 546 sek. 18 korrektioner á 1 푁/푚푚
8 grader 10 sek. - 8,45 푁/푚푚
10 knob 1370 m ~ 266 sek. 22 korrektioner á 0,80 푁/푚푚
5 grader 10 sek. - 4,2 푁/푚푚
10 knob 1250 m ~ 243 sek. 20 korrektioner á 0,80 푁/푚푚
8 grader 10 sek. - 6,8 푁/푚푚
7 knob 350 m ~ 97 sek. 8 korrektioner á 0,50 푁/푚푚
5 grader 10 sek. - 2,60 푁/푚푚
7 knob 470 m ~ 131 sek. 10 korrektioner á 0,50 푁/푚푚
Som ved optegningen af lasthistorikken for indsejlingen til Esbjerg, kan der være sammenfaldende punkter for en drejning og en korrektion. Derfor kan der i det plottede koordinatsystem være en afvigelse i mængden af korrektioner, i forhold til det udregnede. Et plot af dette koordinatsystem er vist på figur 47.

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 61 Kapitel 9 Udmattelse
Figur 47 - Viser belastningshistorikken for indsejlingen til Harwich havn. Koordinatsystem er med tiden i sekunder ud af x-aksen og med bøjningsspændingerne i 푵/풎풎ퟐ op af y-aksen

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 62 Kapitel 9 Udmattelse
9.3 Beregninger Nu hvor alle ruterne er beskrevet i forhold til belastninger over tid, er det muligt at lave udmattel-sesberegninger. Først laves en sammentælling af alle belastninger vist på de forskellige plots over spændingsvariationerne. Ved at tælle sammen over de belastninger, som er vist på plottene, vil det repræsentere det egentlige antal af belastninger. Ved beskrivelse af spændingerne for ruten mellem Esbjerg og Harwich er der valgt et repræsentativt udsnit, hvorfor de belastninger, der er beskrevet i udsnittet, skal ganges op i forhold til den fulde længde. Ved en hastighed på 20 knob bliver der på de 1200 sek. tilbagelagt 12346,7 m. Over den egentlige længde på 596000 m kan dette udsnit gen-tages:
596000 푚12346,7 푚 ≈ 48 푔푎푛푔푒 (ퟗ.ퟏ)
De optalte belastninger i de 1200 sek. skal altså ganges med 48, for at få belastningshistorikken over hele strækningen. De optalte belastninger listes herunder, hvor antallet ganges op med de 48:
Esbjerg – Harwich:
Antal Spændinger 48*37 = 1776 1,80 푁/푚푚
48*3 = 144 3,80 푁/푚푚 Samme procedure som for summeringen af belastningerne på hele ruten anvendes på Esbjerg og Harwich indsejlingerne. Dette giver følgende optælling af belastninger:
Esbjerg: Harwich:
Antal Spændinger 34 1,80 푁/푚푚 4 1 푁/푚푚 62 0,80 푁/푚푚 34 0,50 푁/푚푚 1 19,5 푁/푚푚 2 9,3 푁/푚푚 1 8,45 푁/푚푚 1 4,20 푁/푚푚 1 2,60 푁/푚푚
Antal Spændinger 21 1,80 N/mm 4 1,30 N/mm 18 1 N/mm 40 0,80 푁/푚푚 17 0,50 푁/푚푚 1 19,5 푁/푚푚 1 14 푁/푚푚 1 9,3 푁/푚푚 1 8,45 푁/푚푚 1 6,8 푁/푚푚 1 4,20 푁/푚푚 1 2,60 푁/푚푚

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 63 Kapitel 9 Udmattelse
DNV norm I DNV normen for udmattelsesdesign for offshore stålkonstruktioner, udvælges den designkategori, der beskriver konstruktionen bedst. I dette tilfælde er det muligt at beskrive det kritiske punkts be-lastningssituation, med to forskellige designkategorier [17.1]. Disse to er F og W3 som vist på figur 48. Kategori F beskriver situationen med en midterplade større end den tværgående, og kategori W3 beskriver midterpladen med samme størrelse som den tværgående. Af disse to er kategori W3 den mest kritiske. Samlingerne er angivet som svejsesamlinger mellem de to dele, hvorfor levetids-grundlaget er baseret på det. Det vælges dog alligevel at arbejde videre med disse kategorityper ud fra den opfattelse, at en støbt konstruktion er stærkere end en svejst.
I dette projekt kan tillerarmenes placering beskrives ud fra begge kategorier. De øverste to sæt arme kan beskrives ud fra kategori F, mens de nederste to sæt er mere sammenlignelige med kategori W3. Da sidstnævnte kategori er den mest kritiske af de to, vælges det derfor at arbejde videre med den. Denne udvalgte designkategori anvendes nu i SN-kurven, som er fra samme norm. SN-kurven er vist på figur 49.
Figur 48 - Viser de to designkategorier fra DNV normen, som bedst kan beskrive det kritiske punkts designsituation [17.1]

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 64 Kapitel 9 Udmattelse
Ved at have fastlagt en designkategori kan udmattelseslinjen for denne følges i SN-kurven. Linjen angiver udmattelsesgrænsen for et interval af spændinger. Disse informationer kan anvendes i Palmgren-Miners formel, som summerer op over udmattelsesgrænsen for de forskellige spændinger. Palmgren-Miners formel lyder:
푛푁 =
푛푁 +
푛푁 + ⋯ = 1 (ퟗ.ퟐ)
Hvor 푛 er antallet af gentagelser for en belastning, mens 푁 angiver udmattelsesgrænsen for netop denne belastning. Definitionen er, at en konstruktion vurderes at ”fejle” eller at være udmattet, når den samlede summering bliver 1. På SN-kurven opgives det fra DNV, at der fra 10 til 10 cykler er en hældning af kurverne på 푚 = 3, mens der fra 10 cykler og derover er en hældning på 푚 = 5. For den pågældende design-gruppe W3 kan der ved 10 cykler aflæses en belastning på 33 MPa. Disse informationer anvendes i følgende formel for at bestemme det antal cykler, som konstruktionen kan holde til inden brud:
휎 ∗ 푁 = 휎 ∗ 10 (ퟗ.ퟑ)
Hvor 휎 er den fundne spænding i det kritiske punkt, 푁 er antal cykler, og 휎 er spændingen ved 10 cykler, for den anvendte designkategori. Formlen anvendes nu på de listede spændinger for det kritiske punkt, hvorved antallet af cykler kan findes til hver af disse.
Figur 49 - Viser SN-kuven for udmattelseslevetiden for emner i havvand. Nederst ses designgruppe W3, som anvendes i pro-jektet [17.2]
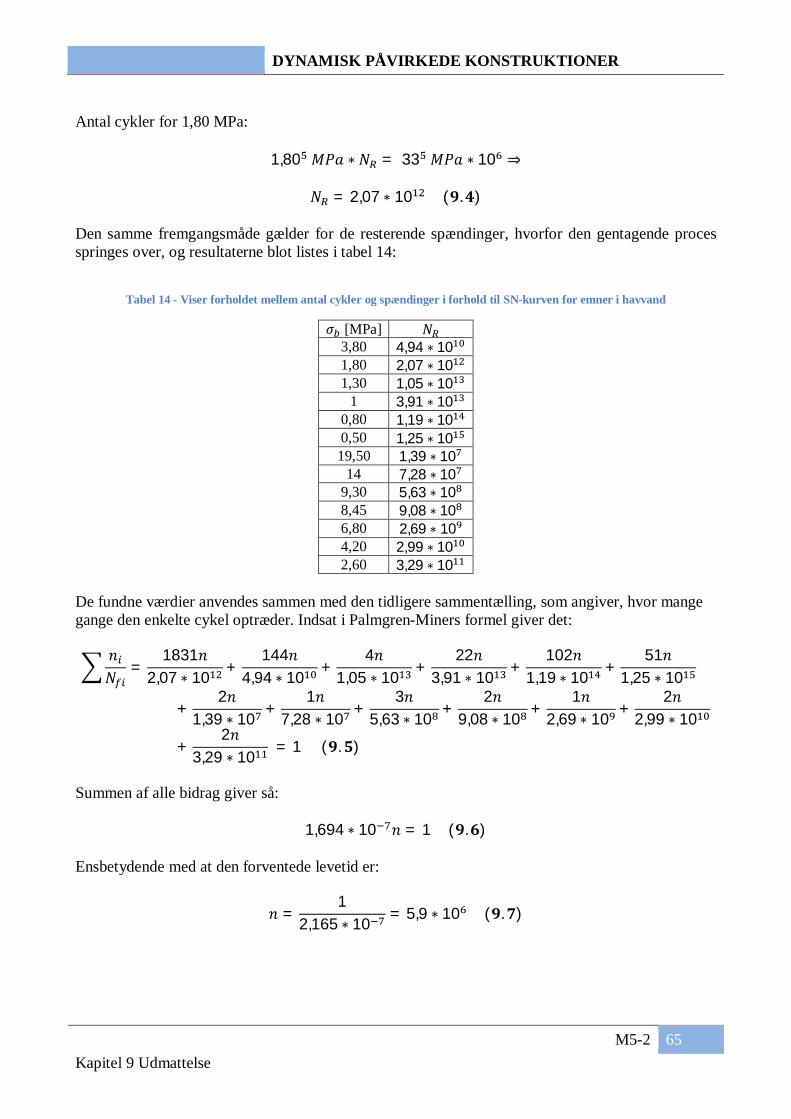
DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 65 Kapitel 9 Udmattelse
Antal cykler for 1,80 MPa:
1,80 푀푃푎 ∗ 푁 = 33 푀푃푎 ∗ 10 ⇒
푁 = 2,07 ∗ 10 (ퟗ.ퟒ) Den samme fremgangsmåde gælder for de resterende spændinger, hvorfor den gentagende proces springes over, og resultaterne blot listes i tabel 14:
Tabel 14 - Viser forholdet mellem antal cykler og spændinger i forhold til SN-kurven for emner i havvand
휎 [MPa] 푁 3,80 4,94 ∗ 10 1,80 2,07 ∗ 10 1,30 1,05 ∗ 10
1 3,91 ∗ 10 0,80 1,19 ∗ 10 0,50 1,25 ∗ 10 19,50 1,39 ∗ 10
14 7,28 ∗ 10 9,30 5,63 ∗ 10 8,45 9,08 ∗ 10 6,80 2,69 ∗ 10 4,20 2,99 ∗ 10 2,60 3,29 ∗ 10
De fundne værdier anvendes sammen med den tidligere sammentælling, som angiver, hvor mange gange den enkelte cykel optræder. Indsat i Palmgren-Miners formel giver det:
푛푁 =
1831푛2,07 ∗ 10 +
144푛4,94 ∗ 10 +
4푛1,05 ∗ 10 +
22푛3,91 ∗ 10 +
102푛1,19 ∗ 10 +
51푛1,25 ∗ 10
+2푛
1,39 ∗ 10 +1푛
7,28 ∗ 10 +3푛
5,63 ∗ 10 +2푛
9,08 ∗ 10 +1푛
2,69 ∗ 10 +2푛
2,99 ∗ 10
+2푛
3,29 ∗ 10 = 1 (ퟗ.ퟓ)
Summen af alle bidrag giver så:
1,694 ∗ 10 푛 = 1 (ퟗ.ퟔ) Ensbetydende med at den forventede levetid er:
푛 =1
2,165 ∗ 10 = 5,9 ∗ 10 (ퟗ.ퟕ)

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 66 Kapitel 9 Udmattelse
Udmattelsesstyrken ved en sådan udregning er betinget af en partialkoefficientværdi. Denne del af udmattelsesberegningen angiver, hvilken konsekvens en udmattelsessituation vil have. Denne koef-ficient er bestemt ud fra de listede beskrivelser i tabel 15:
Tabel 15 - Viser partialkoefficientværdierne for udmattelsesstyrken ved en beregnet levetid afhængigt af den givne situation [18.1]
Vurderingsmetode Konsekvens af brud Lille konsekvens Stor konsekvens
Skadetolerant 1,00 1,15 Sikker levetid 1,15 1,35
I denne specifikke konstruktion er det vigtigt, at der er tale om en sikker levetid, og at der samtidig vil være stor konsekvens ved brud. Dette bygger på, at det er omkostningsfuldt og besværligt at skifte tilleren. Der anvendes ud fra disse specifikationer en partialkoefficient på 1,35. Dette giver derfor en revideret levetid på:
5,9 ∗ 101,35 = 4,37 ∗ 10 (ퟗ.ퟖ)
9.4 Konklusion på levetid Den udregnede værdi angiver, at tilleren har en udmattelsesgrænse på 4,37 ∗ 10 cykler. Dette in-dikerer, at tilleren kan modstå den definerede spændingsserie 4,37 ∗ 10 gange. Det vurderes der-for, at tilleren har en uendelig levetid. For at godtgøre denne konklusion betragtes SN-kurvens ud-formning på figur 49 i forhold til de spændinger, som er udregnet i det kritiske punkt. Spændinger-ne på kurven er angivet fra 10 til 1000 MPa, og derfor ligger størstedelen af det kritiske punkts spændinger under denne grænse. Definitionen af SN-kurver er, at hvis der ikke opnås spændinger over den nederste grænse for designkategorien, da må der forventes uendelig levetid. For den på-gældende kurve er denne spænding 14 MPa ved 10 cykler, hvilket understøtter konklusionen om uendelig levetid.

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 67 Kapitel 11 Konklusion
10 Monteringsrammer For at kunne efterkomme to af de primære krav fra Scan Steering, er det nødvendigt at montere sty-remaskinen på rammer. Som nævnt i indledningen kan der forekomme problemer med skader på den færdigmonterede styremaskine, hvis denne monteres for tidligt i konstruktionsperioden af ski-bet. Derfor er det ønsket fra Scan Steering, at bærelejet og bundrammen kan monteres udenom re-sten af styremaskinen. På denne måde er det muligt at montere rorstammen og roret tidligt i kon-struktionsperioden. Samtidig kan man beskytte selve styremaskinen og de udsatte dele så som el-komponenter og hydrauliske komponenter ved at montere styremaskinen på det senest mulige tids-punkt. Samtidig ønsker Scan Steering, at kunne servicere bærelejet, uden at skulle demontere hele styremaskinen. Derfor indlægges der plads mellem bærelejet og undersiden af tilleren. På denne måde er det muligt at løfte låget af bærelejekonstruktionen og samtidig have plads til at udføre ser-vicen. Denne afstand fastsættes efter en skønnet arbejdshøjde til 500 mm. Bundrammen og bærele-jekonstruktionen svejses fast på dørken i styremaskinrummet. Herefter monteres toprammen på bundrammen ved boltesamlinger. Der vil ikke blive gået i dybden med dimensioneringen af ram-mekonstruktionen, da denne er irrelevant for projektet. Derfor er rammerne overdimensioneret. Det vælges at bygge rammerne af TPS120x120x10. Alle laskeplader udføres i 10 mm pladestål. På top-pen af rammekonstruktionen placeres en 12 mm plade, hvorpå alle hydrauliske og elektriske kom-ponenter monteres (se figur 50). Rammerne udføres i S235JR, der er let svejsbart og billigt. For at kontrollere konstruktionen er der udført en analyse i Workbench. Denne analyse giver en sikker-hedsfaktor for konstruktionen på 3 og en maksimal deformation på 0,2 mm. Derfor konkluderes det, at rammen er tilstrækkelig stærk til at bære konstruktionen, og at der her vil kunne spares på materi-ale og vægt ved en nærmere dimensionering. Analyseresultaterne kan ses i appendiks 6.
Figur 50 - Viser monteringsrammerne og bærelejekonstruktionen. Den nederste ramme og bærelejekonstruktionen svejses direkte på dørken i styrmaskinrummet. Den øvre del af bærelejekonstruktionen og de to toprammer monteres ved boltesam-linger

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 68 Kapitel 11 Konklusion
11 Konklusion Da projektet bygger på et fastlagt projekt oplæg fra Scan Steering, ligger løsningsdelen relativt fast fra starten af projektet. Der blev fremlagt skitser under præsentationen af projektet, og disse er i så høj grad som muligt forsøgt efterlevet. Derfor var det ønsket at fokusere arbejdsindsatsen på at behandle selve styremaskinen til bunds i forhold til dimensionering og udmattelse. Det har dog været nødvendigt at lægge en del arbejde i de andre maskindele, for at finde de relevante værdier der var nødvendige for at udføre de ønskede beregninger korrekt. Det har været et problem og et irritationselement, at det ikke har været muligt at fastlægge realistiske værdier for belastningerne på styremaskinen. Der har været for mange udefinerede faktorer til, at beregningerne kan betragtes som realistiske. Gennem opbygningen af rapporten har det været nødvendigt at fastsætte mange værdier og størrelser ud fra vurderinger. Dette resulterer i, at projektets resultater ikke vil kunne anvendes i forhold til at lave en styremaskine til et skib. Fremgangsmåderne i beregningerne er dog gennemgået, og vil derfor kunne anvendes ved de reali-stiske værdier på et rigtigt skib. Der er dog også lagt op til, at projektet mere skal fungere som en basis-projektering af fire-stemplede styremaskiner. Derfor vil det ved hvert enkelt styremaskine, der skal fremstilles, være nødvendigt at beregne belastningerne ud fra netop de værdier, der er gældende på det pågældende skib. Derfor vurderer gruppen, at projektarbejdet i den henseende har været vellykket. De-signet, der er opnået, og dimensioneringen af selve styremaskinen har til fulde opfyldt de krav, der var defineret på forhånd af Scan Steering. Projektet vurderes til at være vellykket i forhold til de læringsmål, der er opsat for semesteret. Teori-en for de enkelte delelementer er gennemgået, og selvom resultaterne er urealistiske, vurderes frem-gangsmåderne og metoderne til at være anvendt korrekt. Der er forsøgt at give eksempler og svar på alle de delelementer, der er opstillet som mål for projektet. Det var på forhånd ønsket at projektmodulet skulle foregå i tæt samarbejde med en ekstern samar-bejdspartner. Derfor blev projektet valgt ud fra det projektoplæg, der var fremlagt fra Scan Steering. Her blev der lagt op til et tæt samarbejde mellem projektgruppen og Scan Steering. Det blev dog relativt hurtigt i projektet klart, at der var store forskelle i det ønske Scan Steering havde til resultatet af projek-tet, og de muligheder gruppen havde inden for de definerede læringsmål. Det formodes derfor, at være grunden til at Scan Steering allerede tidligt i projektforløbet trak sig ud af samarbejdet, og derfor ikke leverede de nødvendige oplysninger til dimensioneringen. Derigennem kan de tilnærmelser og vurde-ringer, der er lavet af de vigtige værdier og størrelser i projektet, også forklares. Det må derfor konklu-deres, at samarbejdet med den eksterne partner har været yderst skuffende. Det var gruppens forvent-ninger og forhåbninger, at projektet ville afspejle et realistisk billede af en styremaskine. Dette må på baggrund af de førnævnte årsager ikke siges at være tilfældet. Overordnet vurderer gruppen, at der er leveret en rapport der lever op til de definerede rammer for projektmodulet. Der er givet et relevant løsningsforslag på den definerede problemstilling, og de ram-mer, der er opstillet i rapporten i forhold til konstruktionen af en styremaskine, vurderes til nemt at kun-ne beskrive et realistisk konstruktionsforløb, hvis de aktuelle værdier blev indsat.

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 69 Kapitel 12 Kildeliste
12 Kildeliste [1] http://www.scan-steering.com/, billede
[1.1] http://www.scan-steering.com/products_steering_gear.asp (15/9-2010) [2] Skibshydraulik, pdf-fil [2.1] http://materialeplatform.emu.dk/materialer/public_downloadfile.do?mat=18314837&id=18314769 s. 31 (21/9-2010) [3] www.marineoffshore.net, billede [3.1] http://www.marineoffshore.net/resources/_wsb_295x215_Rudder1.jpg (14/10-2010) [4] Principles of Naval Architecture 2. oplag, volume 3, Forlaget Society of Naval Architects and Marine Engineers
ISBN: 0-939773-02-3 Forfatter: Edward V. Lewis
Motions in Waves and Controllability First Printing, November, 1989
[4.1] s. 370 [5] www.iacs.org.uk, pdf-fil [5.1] http://www.iacs.org.uk/document/public/Publications/Unified_requirements/PDF/UR_M_pdf155.PDF - Kapitel M42 (10/9-2010) [6] www.imo.org [6.1] http://www.imo.org/About/Conventions/ListOfConventions/Pages/International-Convention-for-the-Safety-of-Life-at-Sea-(SOLAS),-1974.aspx (10/9-2010) [7] Metallurgi for ingeniører 9. udgave, 2. oplag 2007, Polyteknisk forlag ISBN: 87-502-0930-2 Forfattere: Conrad Vogel Celia Juhl Ernst Maahn [7.1] s. 544 [7.2] s. 647

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 70 Kapitel 12 Kildeliste
[8] Materialelære for metalindustrien 1. udgave, 6. Oplag, Erhvervsskolernes forlag ISBN-13: 978-87-7510-498-7 ISBN-10: 87-7510-498-9 Forfattere: Borris Pedersen Mogens Rasmussen [8.1] s. 237-239 [9] Smithells Metals Reference Book 8. udgave, Forlaget Elsevier Butterworth-Heinemann ISBN: 0 7506 7509 8 Forfattere: W.F. Gale T.C. Totemeier [9.1] Table 26.47, s. 26-85. [10] www.substech.dk [10.1] http://www.substech.com/dokuwiki/doku.php?id=stainless_steel_aisi_316 (09/12-2010) [11] Grundlæggende skibs- og offshoreteknik 8. udgave, Dansk Teknisk Universitet ISBN: 978-87-7078-002-5 Forfatter: Preben Terndrup Pedersen [11.1] s. 365 [11.2] eksempel 16.4.2 [11.3] s. 313 [11.4] s. 367 [11.5] s. 358 [11.6] s. 368 [11.7] s. 366 [11.8] s. 353 [11.9] s. 312 [11.10] s. 311 [12] www.hatlapa.de [12.1] http://www.hatlapa.de/products/steering-gear/rudder-carrier/ (09/12-2010)

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 71 Kapitel 12 Kildeliste
[13] Roloff/Matek Maschinenelemente (lærebog og tabelbog) 18. oplag, Forlaget Vieweg ISBN: 978-3-8348-0262-0 Forfattere: Dieter Muhs Herbert Wittel Dieter Jannasch Joachim Voβeik [13.1] s. 390 [13.2] Ligning 12.26 [13.3] Ligning 12.9 [13.4] Ligning 12.8 [13.5] Ligning 12.28 [13.6] Tabel 12.7 [13.7] Ligning 12.32 [13.8] Tabel 12.6 [13.9] Ligning 12.29 [13.10] Ligning 8.28 [13.11] Tabel 8-1 [14] www.engineershandbook.com [14.1] http://www.engineershandbook.com/Tables/frictioncoefficients.htm (12/11-2010) [14] Teknisk Ståbi 20. udgave, Nyt Teknisk Forlag ISBN: 978-87-571-2685-3 Fagredaktør: Bjarne Chr. Jensen
[14.1] s.100 [14.2] s. 98 [15] Hydraulik 3. udgave, Erhvervsskolernes forlag ISBN: 87-7881-449-9 [15.1] s. 187 [16] Praktisk regulering og instrumentering 6. udgave, Heilmann’s forlag ISBN: 978-87-90603-14-4 Forfatter: Thomas Heilmann [16.1] s.16

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 72 Kapitel 12 Kildeliste
[17] DNV norm Recommended Practice DNV-RP-C203 Fatigue design of offshore steel structures
[17.1] s. 60 [17.2] s. 14 [18] DS Eurocode 3: Stålkonstruktioner – Del 1-9: Udmattelse
DS/EN 1993-1-9+AC [18.1] s. 11 tabel 3.1

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 73 Kapitel 13 Appendiks
13 Appendiks
Appendiks 1, Matlab kode
Tid.m clc; clear all; rho=1028; AR=1.24691; SR=24.26; nknob=[1:25]; t=[-14:0.1:42]; for i=1:length(t) tid=t(i); delta(i)=(35*pi/180)*cos(pi/28*tid); teta=(35*pi/180)*cos(pi/28*tid); for j=length(nknob) n=nknob(j); [V]= CompVel(n); Fd=0.5*rho*V^2*SR*2*pi*((AR*0.9)/(1.8+((AR^2+4)^(1/2))))*teta; end end for i=1:length(t) tid=t(i); wq1=rand(1,1); wq2=rand(1,1); deltaq(i)=((35*pi/180)*cos(pi/28*tid) + wq1*(2*pi/180)*sin(2*pi/28*tid)+ wq2*(3*pi/180)*sin(2*pi/28*tid)); end whos Z(i,j)= 0.8833333*0.5*rho*V^2*SR*2*pi*((AR*0.9)/(1.8+((AR^2+4)^(1/2))))*(35*pi/180)*cos(pi/28*tid) + wq1*(3*pi/180)*sin(1*pi/28*tid)+ wq2*(2*pi/180)*sin(2*pi/28*tid); plot(t,deltaq)

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 74 Kapitel 13 Appendiks
Compvel.m function [Vror]= CompVel(nknob) lnd=195; kinvis=1.83*10^-6; rho=1028; S=5500; dskrue=6; w=0.29; Vskib=(1.852/3.6)*nknob; Re=(Vskib*lnd)/kinvis; CF=(0.075)/((log(Re)-2)^2); CA=(105*(150*10^-6/lnd)^(1/3)-0.64)*10^-3; CT=1.1*CF+CA; R=(1/2)*rho*Vskib^2*CT*S; VA=Vskib*(1-w); CTH=R/((1/2)*rho*VA^2*(pi/4)*dskrue^2); Umiue=-1+(1+CTH)^(1/2); Vror=VA*1+(1/2)*Umiue;

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 75 Kapitel 13 Appendiks
Appendiks 2, Torsion på rorstamme Excel. Kan ses på cd rom
Appendiks 3, Beregning for kegleprespasning Excel. Kan ses på cd rom
Appendiks 4, Kraftberegning på ror Excel. Kan ses på cd rom
Appendiks 5, Dimensionering af tiller Excel. Kan ses på cd rom

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 76 Kapitel 13 Appendiks
Appendiks 6, Workbench analyse for rammekonstruktion
Project First Saved Monday, December 06, 2010 Last Saved Monday, December 06, 2010
Product Version 12.0.1 Release
Contents
Units
Model (A4) o Geometry
Parts o Coordinate Systems

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 77 Kapitel 13 Appendiks
o Connections Contact Regions
o Mesh o Static Structural (A5)
Analysis Settings Loads Solution (A6)
Solution Information Results
Material Data o Structural Steel
Units
TABLE 1 Unit System Metric (mm, kg, N, s, mV, mA) Degrees rad/s Celsius
Angle Degrees Rotational Velocity rad/s
Temperature Celsius
Model (A4) Geometry
TABLE 2 Model (A4) > Geometry
Object Name Geometry State Fully Defined
Definition
Source C:\Users\Torben Mogensen\AppData\Local\Temp\WB_TORBENMOGENS-PC_284_2\unsaved_project_files\dp0\SYS\DM\SYS.agdb
Type DesignModeler Length Unit Millimeters
Element Control Program Controlled Display Style Part Color
Bounding Box Length X 1277,7 mm Length Y 1106,2 mm Length Z 870,61 mm
Properties Volume 4,3804e+007 mm³
Mass 343,86 kg Scale Factor Value 1,
Statistics Bodies 13
Active Bodies 13 Nodes 99112
Elements 20722 Mesh Metric None
Preferences Import Solid Bodies Yes Import Surface Bo- Yes
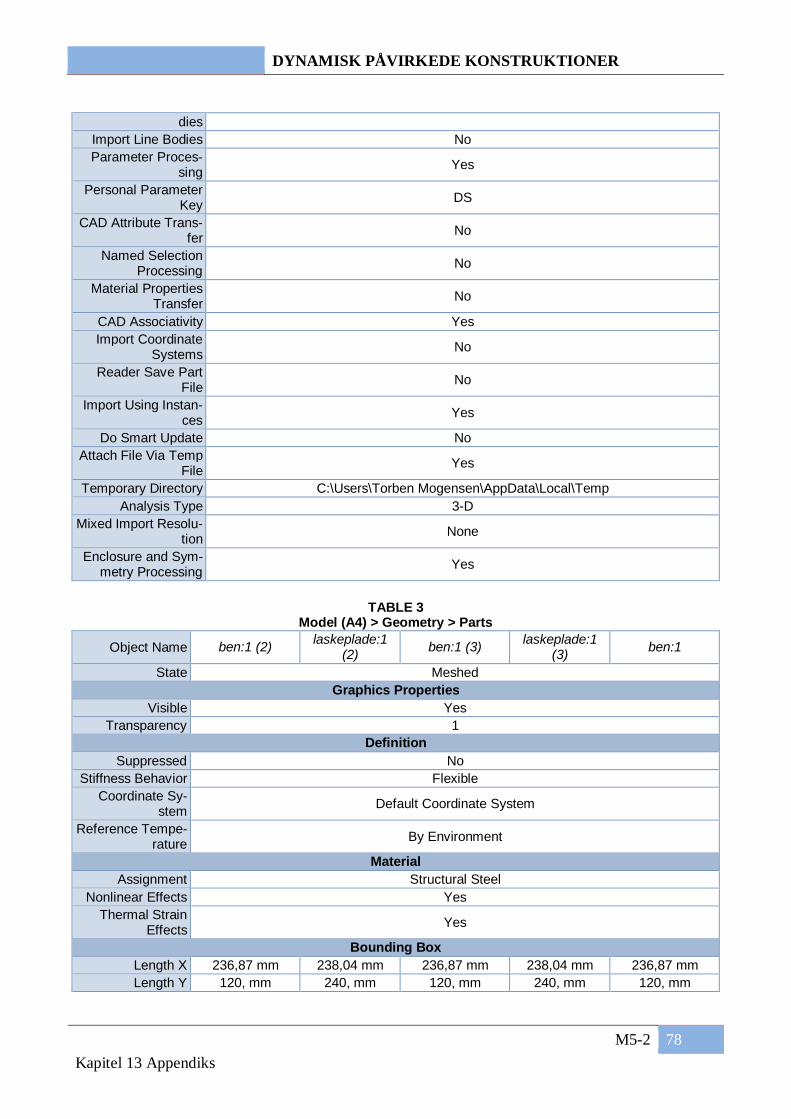
DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 78 Kapitel 13 Appendiks
dies Import Line Bodies No Parameter Proces-
sing Yes
Personal Parameter Key DS
CAD Attribute Trans-fer No
Named Selection Processing No
Material Properties Transfer No
CAD Associativity Yes Import Coordinate
Systems No
Reader Save Part File No
Import Using Instan-ces Yes
Do Smart Update No Attach File Via Temp
File Yes
Temporary Directory C:\Users\Torben Mogensen\AppData\Local\Temp Analysis Type 3-D
Mixed Import Resolu-tion None
Enclosure and Sym-metry Processing Yes
TABLE 3 Model (A4) > Geometry > Parts
Object Name ben:1 (2) laskeplade:1 (2) ben:1 (3) laskeplade:1
(3) ben:1
State Meshed Graphics Properties
Visible Yes Transparency 1
Definition Suppressed No
Stiffness Behavior Flexible Coordinate Sy-
stem Default Coordinate System
Reference Tempe-rature By Environment
Material Assignment Structural Steel
Nonlinear Effects Yes Thermal Strain
Effects Yes
Bounding Box Length X 236,87 mm 238,04 mm 236,87 mm 238,04 mm 236,87 mm Length Y 120, mm 240, mm 120, mm 240, mm 120, mm

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 79 Kapitel 13 Appendiks
Length Z 650,17 mm 56,474 mm 650,17 mm 56,474 mm 650,17 mm Properties
Volume 2,8116e+006 mm³
6,7612e+005 mm³
2,8116e+006 mm³
6,7612e+005 mm³
2,8116e+006 mm³
Mass 22,071 kg 5,3075 kg 22,071 kg 5,3075 kg 22,071 kg Centroid X 44,855 mm -15,748 mm -932,43 mm -993,04 mm -932,43 mm Centroid Y -817,44 mm 48,759 mm Centroid Z 1519, mm 1199,2 mm 1704,2 mm 1384,4 mm 1704,2 mm
Moment of Inertia Ip1
7,9588e+005 kg·mm² 25051 kg·mm² 7,9588e+005
kg·mm² 25048 kg·mm² 7,9589e+005 kg·mm²
Moment of Inertia Ip2
7,9588e+005 kg·mm² 25028 kg·mm² 7,9589e+005
kg·mm² 25056 kg·mm² 7,9589e+005 kg·mm²
Moment of Inertia Ip3 89756 kg·mm² 49951 kg·mm² 89756 kg·mm² 49977 kg·mm² 89756 kg·mm²
Statistics Nodes 6682 1722 6682 1587 6682
Elements 936 218 936 198 936 Mesh Metric None
TABLE 4 Model (A4) > Geometry > Parts
Object Name ben:1 (4) laskeplade:1 (4) Skraastiver 1:1 Skraastiver 1:2 skraastiver 2:2
State Meshed Graphics Properties
Visible Yes Transparency 1
Definition Suppressed No
Stiffness Behavior Flexible Coordinate Sy-
stem Default Coordinate System
Reference Tem-perature By Environment
Material Assignment Structural Steel
Nonlinear Effects Yes Thermal Strain
Effects Yes
Bounding Box Length X 236,87 mm 238,04 mm 978,36 mm 791,9 mm 236,87 mm Length Y 120, mm 240, mm 120, mm 746,2 mm Length Z 650,17 mm 56,474 mm 464,98 mm 790,68 mm 650,17 mm
Properties
Volume 2,8116e+006 mm³
6,7612e+005 mm³ 4,4346e+006 mm³ 3,94e+006 mm³
Mass 22,071 kg 5,3075 kg 34,812 kg 30,929 kg Centroid X 44,855 mm -15,748 mm -443,79 mm 44,861 mm Centroid Y 48,759 mm -817,44 mm -384,34 mm Centroid Z 1519, mm 1199,2 mm 1611,6 mm 1519,1 mm
Moment of Inertia Ip1
7,9588e+005 kg·mm² 25049 kg·mm² 1,41e+005 kg·mm² 2,1571e+006
kg·mm²

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 80 Kapitel 13 Appendiks
Moment of Inertia Ip2
7,9588e+005 kg·mm² 25044 kg·mm² 3,0408e+006
kg·mm² 3,0407e+006
kg·mm² 1,2493e+005
kg·mm² Moment of Inertia
Ip3 89756 kg·mm² 49966 kg·mm² 3,0413e+006 kg·mm² 2,1579e+006 kg·mm²
Statistics Nodes 6682 1696 11116 12274
Elements 936 215 1568 1900 Mesh Metric None
TABLE 5 Model (A4) > Geometry > Parts
Object Name skraastiver 2:3 Plade1:1 laskeplade:1 State Meshed
Graphics Properties Visible Yes
Transparency 1 Definition
Suppressed No Stiffness Behavior Flexible
Coordinate System Default Coordinate System Reference Temperature By Environment
Material Assignment Structural Steel
Nonlinear Effects Yes Thermal Strain Effects Yes
Bounding Box Length X 236,87 mm 1097,5 mm 238,04 mm Length Y 746,2 mm 986,2 mm 240, mm Length Z 650,17 mm 219,82 mm 56,474 mm
Properties Volume 3,94e+006 mm³ 1,3104e+007 mm³ 6,7612e+005 mm³
Mass 30,929 kg 102,87 kg 5,3075 kg Centroid X -932,43 mm -383,18 mm -993,04 mm Centroid Y -384,34 mm 48,759 mm Centroid Z 1704,3 mm 1931,5 mm 1384,4 mm
Moment of Inertia Ip1 2,1571e+006 kg·mm² 8,3508e+006 kg·mm² 25049 kg·mm² Moment of Inertia Ip2 1,2493e+005 kg·mm² 1,0575e+007 kg·mm² 25029 kg·mm² Moment of Inertia Ip3 2,1579e+006 kg·mm² 1,8924e+007 kg·mm² 49951 kg·mm²
Statistics Nodes 12274 18875 1724
Elements 1900 9192 219 Mesh Metric None
Coordinate Systems
TABLE 6 Model (A4) > Coordinate Systems > Coordinate System
Object Name Global Coordinate System State Fully Defined
Definition Type Cartesian

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 81 Kapitel 13 Appendiks
Ansys System Number 0, Origin
Origin X 0, mm Origin Y 0, mm Origin Z 0, mm Directional Vectors
X Axis Data [ 1, 0, 0, ] Y Axis Data [ 0, 1, 0, ] Z Axis Data [ 0, 0, 1, ]
Connections
TABLE 7 Model (A4) > Connections
Object Name Connections State Fully Defined
Auto Detection Generate Contact On Update Yes
Tolerance Type Slider Tolerance Slider 0, Tolerance Value 4,7527 mm
Face/Face Yes Face/Edge No Edge/Edge No
Priority Include All Group By Bodies
Search Across Bodies Revolute Joints Yes
Fixed Joints Yes Transparency
Enabled Yes
TABLE 8 Model (A4) > Connections > Contact Regions
Object Name Contact Region Contact Region 2 Contact Region 3 Contact Region 4 Contact Region 5 State Fully Defined
Scope Scoping Method Geometry Selection
Contact 1 Face Target 1 Face
Contact Bodies ben:1 (2) ben:1 (3) Target Bodies laskeplade:1 (2) Skraastiver 1:2 skraastiver 2:2 Plade1:1 laskeplade:1 (3)
Definition Type Bonded
Scope Mode Automatic Behavior Symmetric
Suppressed No Advanced
Formulation Pure Penalty Normal Stiffness Program Controlled Update Stiffness Never

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 82 Kapitel 13 Appendiks
Pinball Region Program Controlled
TABLE 9 Model (A4) > Connections > Contact Regions
Object Name Contact Region 6
Contact Region 7
Contact Region 8
Contact Region 9
Contact Region 10
State Fully Defined Scope
Scoping Method Geometry Selection Contact 1 Face
Target 1 Face Contact Bodies ben:1 (3) ben:1
Target Bodies Skraastiver 1:2 skraastiver 2:3 Plade1:1 Skraastiver 1:1 skraastiver 2:3 Definition
Type Bonded Scope Mode Automatic
Behavior Symmetric Suppressed No
Advanced Formulation Pure Penalty
Normal Stiffness Program Controlled
Update Stiffness Never
Pinball Region Program Controlled
TABLE 10 Model (A4) > Connections > Contact Regions
Object Name Contact Region 11
Contact Region 12
Contact Region 13
Contact Region 14
Contact Region 15
State Fully Defined Scope
Scoping Method Geometry Selection
Contact 1 Face Target 1 Face
Contact Bodies ben:1 ben:1 (4) Target Bodies Plade1:1 laskeplade:1 laskeplade:1 (4) Skraastiver 1:1 skraastiver 2:2
Definition Type Bonded
Scope Mode Automatic Behavior Symmetric
Suppressed No Advanced
Formulation Pure Penalty Normal
Stiffness Program Controlled
Update Stiffness Never
Pinball Region Program Controlled
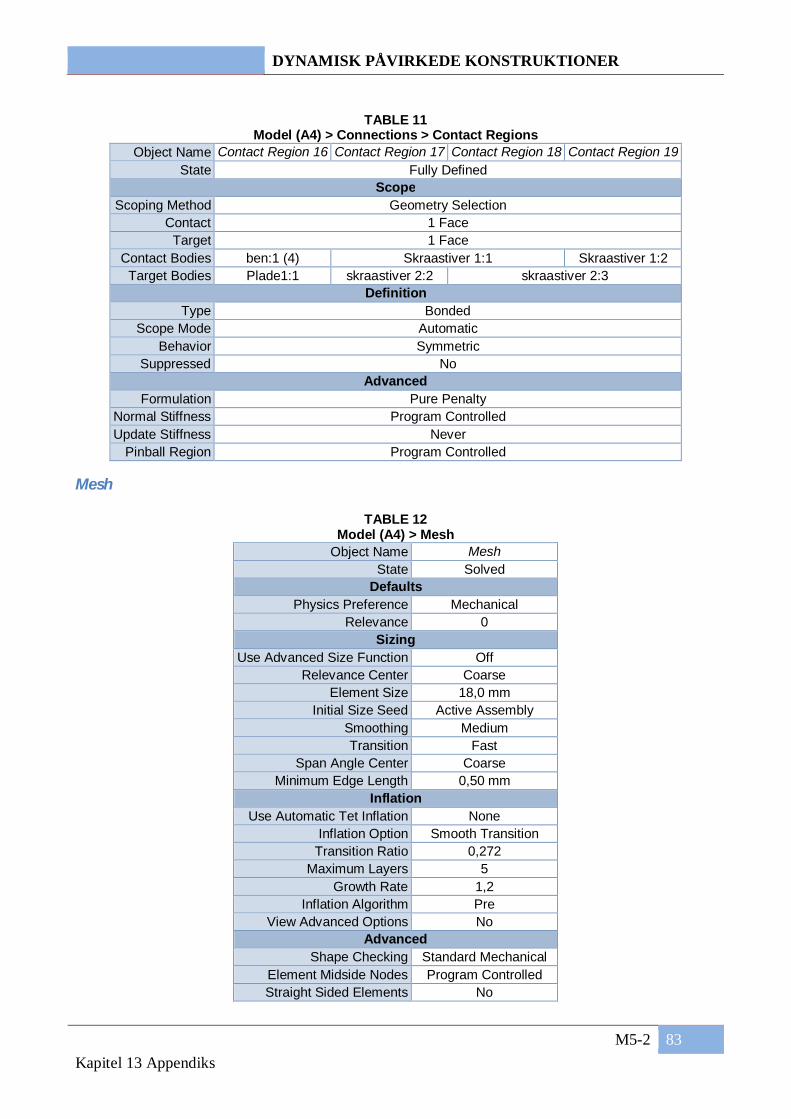
DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 83 Kapitel 13 Appendiks
TABLE 11 Model (A4) > Connections > Contact Regions
Object Name Contact Region 16 Contact Region 17 Contact Region 18 Contact Region 19 State Fully Defined
Scope Scoping Method Geometry Selection
Contact 1 Face Target 1 Face
Contact Bodies ben:1 (4) Skraastiver 1:1 Skraastiver 1:2 Target Bodies Plade1:1 skraastiver 2:2 skraastiver 2:3
Definition Type Bonded
Scope Mode Automatic Behavior Symmetric
Suppressed No Advanced
Formulation Pure Penalty Normal Stiffness Program Controlled Update Stiffness Never
Pinball Region Program Controlled
Mesh
TABLE 12 Model (A4) > Mesh
Object Name Mesh State Solved
Defaults Physics Preference Mechanical
Relevance 0 Sizing
Use Advanced Size Function Off Relevance Center Coarse
Element Size 18,0 mm Initial Size Seed Active Assembly
Smoothing Medium Transition Fast
Span Angle Center Coarse Minimum Edge Length 0,50 mm
Inflation Use Automatic Tet Inflation None
Inflation Option Smooth Transition Transition Ratio 0,272
Maximum Layers 5 Growth Rate 1,2
Inflation Algorithm Pre View Advanced Options No
Advanced Shape Checking Standard Mechanical
Element Midside Nodes Program Controlled Straight Sided Elements No

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 84 Kapitel 13 Appendiks
Number of Retries Default (4) Rigid Body Behavior Dimensionally Reduced
Mesh Morphing Disabled Pinch
Pinch Tolerance Please Define Generate on Refresh No
Statistics Nodes 99112
Elements 20722 Mesh Metric None
Static Structural (A5)
TABLE 13 Model (A4) > Analysis Object Name Static Structural (A5)
State Solved Definition
Physics Type Structural Analysis Type Static Structural Solver Target ANSYS Mechanical
Options Environment Temperature 22, °C
Generate Input Only No
TABLE 14 Model (A4) > Static Structural (A5) > Analysis Settings
Object Name Analysis Settings State Fully Defined
Step Controls Number Of Steps 1,
Current Step Number 1, Step End Time 1, s
Auto Time Stepping Program Controlled Solver Controls
Solver Type Program Controlled Weak Springs Program Controlled
Large Deflection Off Inertia Relief Off
Nonlinear Controls Force Convergence Program Controlled
Moment Convergence Program Controlled Displacement Convergence Program Controlled
Rotation Convergence Program Controlled Line Search Program Controlled
Output Controls Calculate Stress Yes Calculate Strain Yes
Calculate Results At All Time Points Analysis Data Management
Solver Files Directory \\aau.dk\civil\projectgroups\m5-2-

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 85 Kapitel 13 Appendiks
e10\Workbench\ramme_files\dp0\SYS\MECH\ Future Analysis None
Scratch Solver Files Directo-ry
Save ANSYS db No Delete Unneeded Files Yes
Nonlinear Solution No Solver Units Active System
Solver Unit System nmm
TABLE 15 Model (A4) > Static Structural (A5) > Loads
Object Name Fixed Support Force Force 2 State Fully Defined
Scope Scoping Method Geometry Selection
Geometry 4 Faces 2 Faces Definition
Type Fixed Support Force Suppressed No
Define By Components Coordinate System Global Coordinate System
X Component 0, N (ramped) Y Component 85000 N (ramped) -85000 N (ramped) Z Component 0, N (ramped)
FIGURE 1 Model (A4) > Static Structural (A5) > Force

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 86 Kapitel 13 Appendiks
FIGURE 2 Model (A4) > Static Structural (A5) > Force 2
Solution (A6)
TABLE 16 Model (A4) > Static Structural (A5) > Solution
Object Name Solution (A6) State Solved
Adaptive Mesh Refinement Max Refinement Loops 1,
Refinement Depth 2,
TABLE 17 Model (A4) > Static Structural (A5) > Solution (A6) > Solution Information
Object Name Solution Information State Solved
Solution Information Solution Output Solver Output
Newton-Raphson Residuals 0 Update Interval 2,5 s Display Points All
TABLE 18 Model (A4) > Static Structural (A5) > Solution (A6) > Results
Object Name Equivalent Stress Total Deformation State Solved
Scope

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 87 Kapitel 13 Appendiks
Scoping Method Geometry Selection Geometry All Bodies
Definition Type Equivalent (von-Mises) Stress Total Deformation
By Time Display Time Last
Calculate Time History Yes Use Average Yes
Identifier Results
Minimum 5,3973e-005 MPa 0, mm Maximum 78,107 MPa 0,21971 mm
Minimum Occurs On laskeplade:1 (4) laskeplade:1 (2) Maximum Occurs On ben:1 (2) Plade1:1
Information Time 1, s
Load Step 1 Substep 1
Iteration Number 1
Material Data Structural Steel
TABLE 19 Structural Steel > Constants
Density 7.85e-006 kg mm^-3 Coefficient of Thermal Expansion 1.2e-005 C^-1
Specific Heat 4.34e+005 mJ kg^-1 C^-1 Thermal Conductivity 6.05e-002 W mm^-1 C^-1
Resistivity 1.7e-004 ohm mm
TABLE 20 Structural Steel > Compressive Ultimate Strength
Compressive Ultimate Strength MPa 0
TABLE 21 Structural Steel > Compressive Yield Strength
Compressive Yield Strength MPa 250
TABLE 22 Structural Steel > Tensile Yield Strength
Tensile Yield Strength MPa 250
TABLE 23 Structural Steel > Tensile Ultimate Strength
Tensile Ultimate Strength MPa 460

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 88 Kapitel 13 Appendiks
TABLE 24 Structural Steel > Alternating Stress
Alternating Stress MPa Cycles Mean Stress MPa 3999 10 0 2827 20 0 1896 50 0 1413 100 0 1069 200 0 441 2000 0 262 10000 0 214 20000 0 138 1.e+005 0 114 2.e+005 0 86.2 1.e+006 0
TABLE 25 Structural Steel > Strain-Life Parameters
Strength Coeffi-cient MPa
Strength Ex-ponent
Ductility Coef-ficient
Ductility Ex-ponent
Cyclic Strength Coefficient MPa
Cyclic Strain Harde-ning Exponent
920 -0.106 0.213 -0.47 1000 0.2
TABLE 26 Structural Steel > Relative Permeability
Relative Permeability 10000
TABLE 27 Structural Steel > Isotropic Elasticity
Temperature C Young's Modulus MPa Poisson's Ratio
2.e+005 0.3 Equivalent Stress Subject: Date Monday, December 06, 2010 Comments:

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 89 Kapitel 13 Appendiks
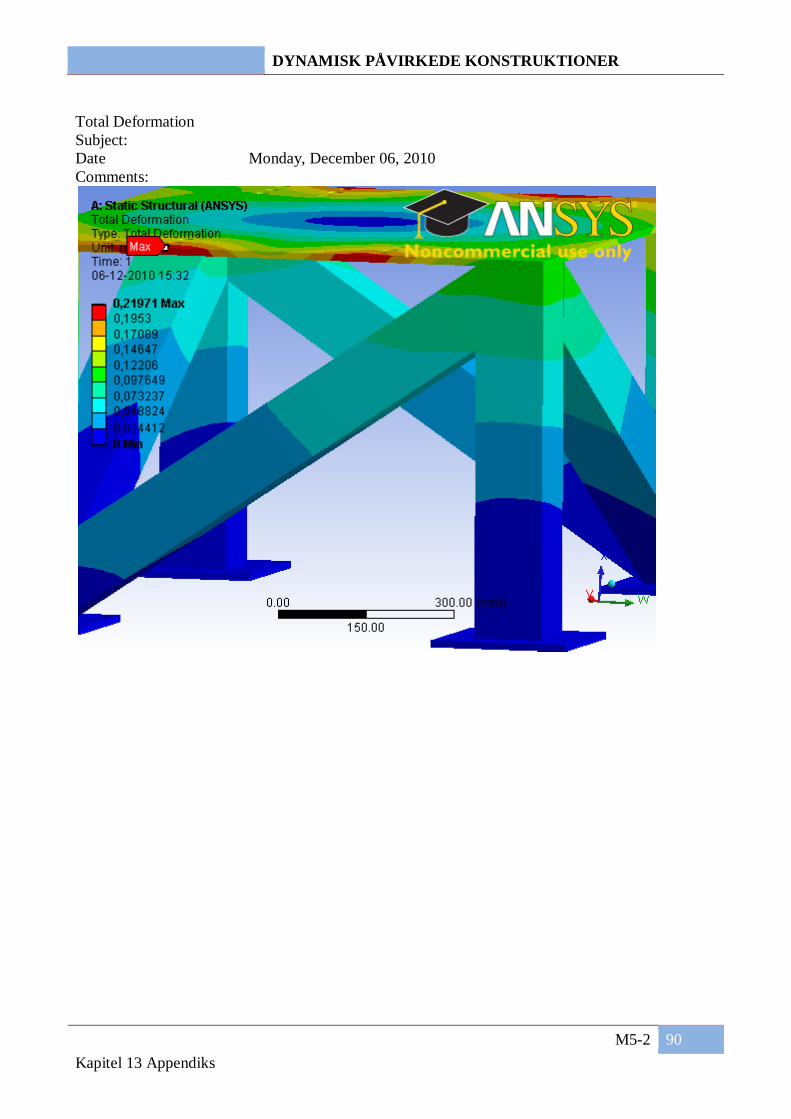
DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 90 Kapitel 13 Appendiks
Total Deformation Subject: Date Monday, December 06, 2010 Comments:

DYNAMISK PÅVIRKEDE KONSTRUKTIONER
M5-2 91 Kapitel 14 Bilag
14 Bilag
Bilag 1, E-mail fra DNV Fra: Michael Larsen[SMTP:[email protected]] Sendt: 30. september 2010 13:33:13 Til: Torben Kjærgaard Mogensen Emne: FW: Safety factor Videresendt automatisk vha. en regel
Subject: Safety factor Date: Thu, 30 Sep 2010 13:15:23 +0200 From: [email protected] To: [email protected] Ref. your question to DNV When referred to rudder torque, the tiler shall be designed with a safety factor of 2.0 according to DNV rules. Best regards John Olav Nøkleby DNV - Oslo NACNO 373 - Machinery