sub graph listing محمد مهدی طالبی دانشگاه صنعتی امیرکبیر
Post on 19-Dec-2015
240 views
TRANSCRIPT
Sub Graph Listingمحمد مهدی طالبی
دانشگاه صنعتی امیرکبیر

spanning subgraph of G : is a subgraph of G which includes all the vertices of G.
a spanning tree of G : is a spanning subgraph of G which is a tree.
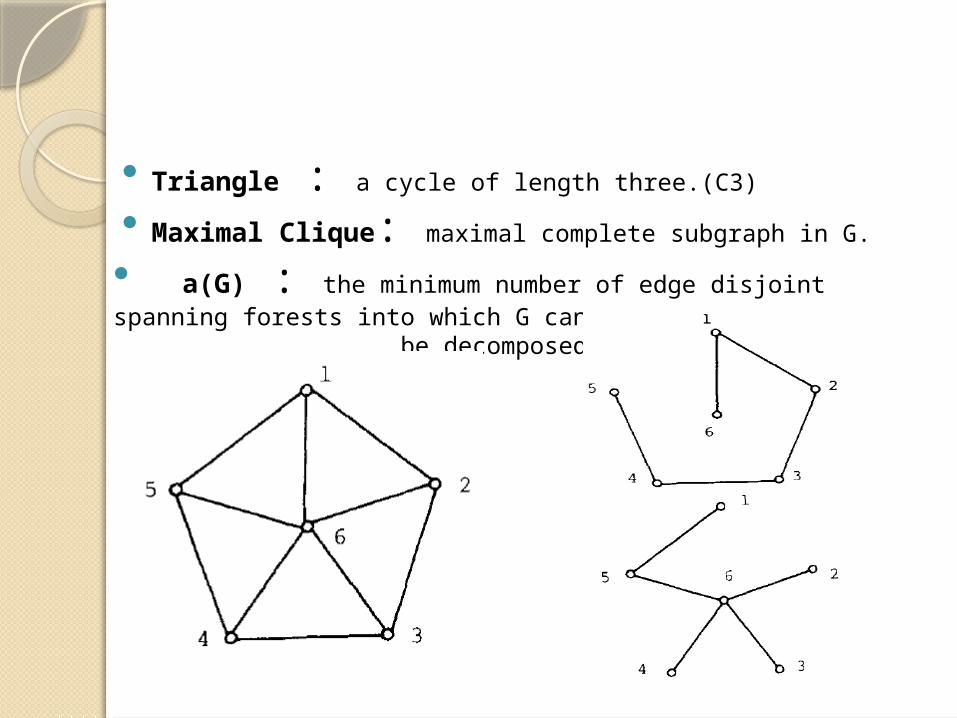
Triangle : a cycle of length three.(C3)
Maximal Clique: maximal complete subgraph in G.
a(G) : the minimum number of edge disjoint spanning forests into which G can be decomposed.
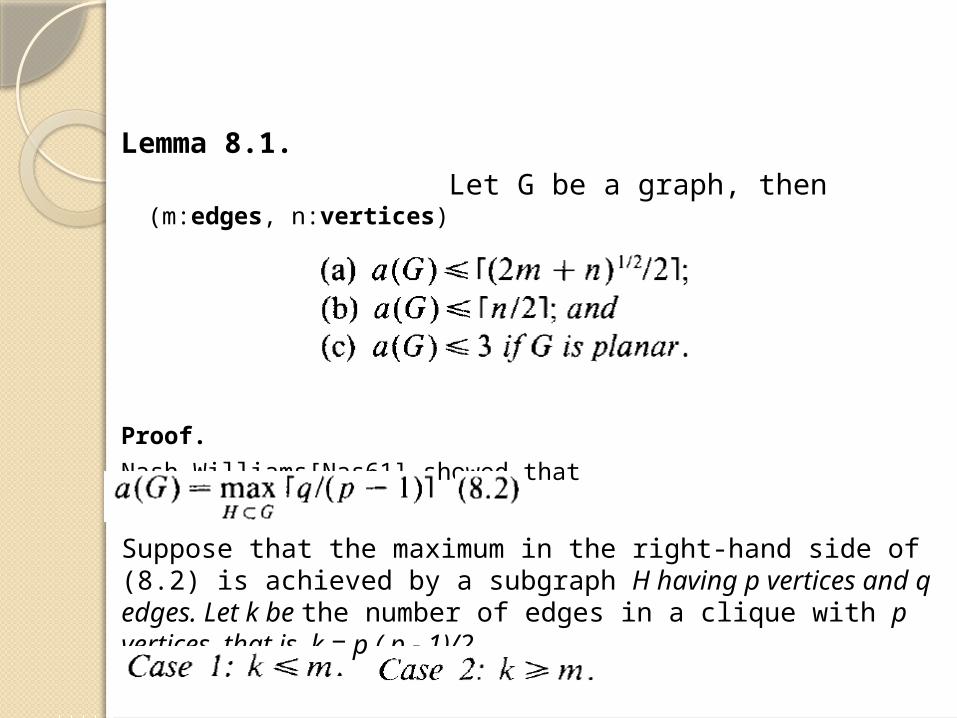
Lemma 8.1.
Let G be a graph, then (m:edges, n:vertices)
Proof.
Nash-Williams[Nas61] showed that
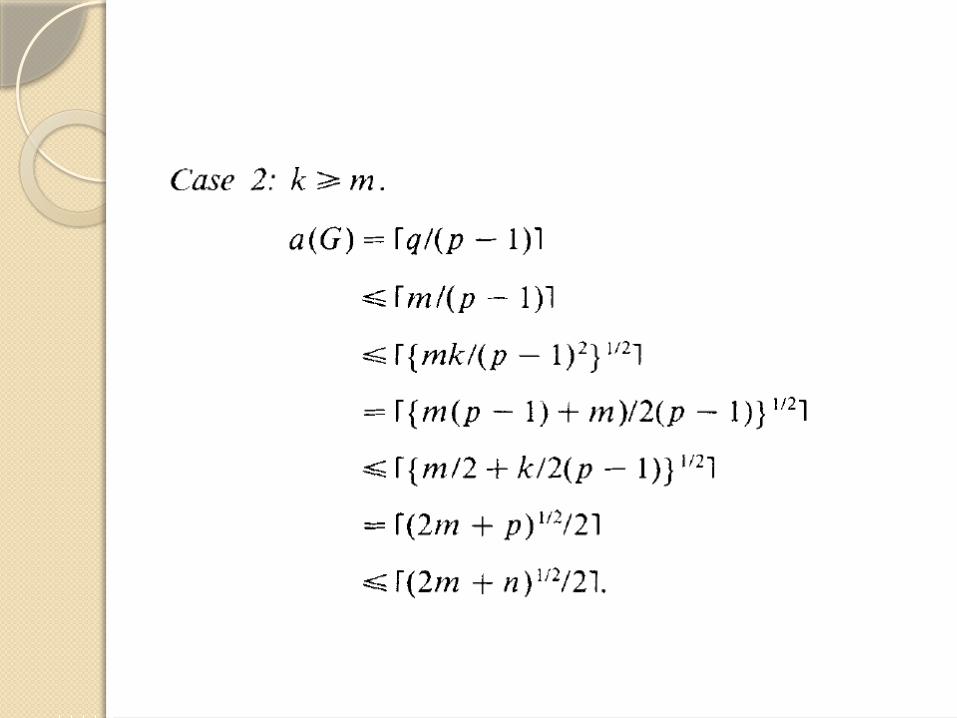
Suppose that the maximum in the right-hand side of (8.2) is achieved by a subgraph H having p vertices and q edges. Let k be the number of edges in a clique with p vertices, that is, k = p ( p - 1)/2.



It should be noted that a(G) = O(1) for a large class of graphs including:•planar graphs • graphs of bounded genus• graphs of bounded maximum degree
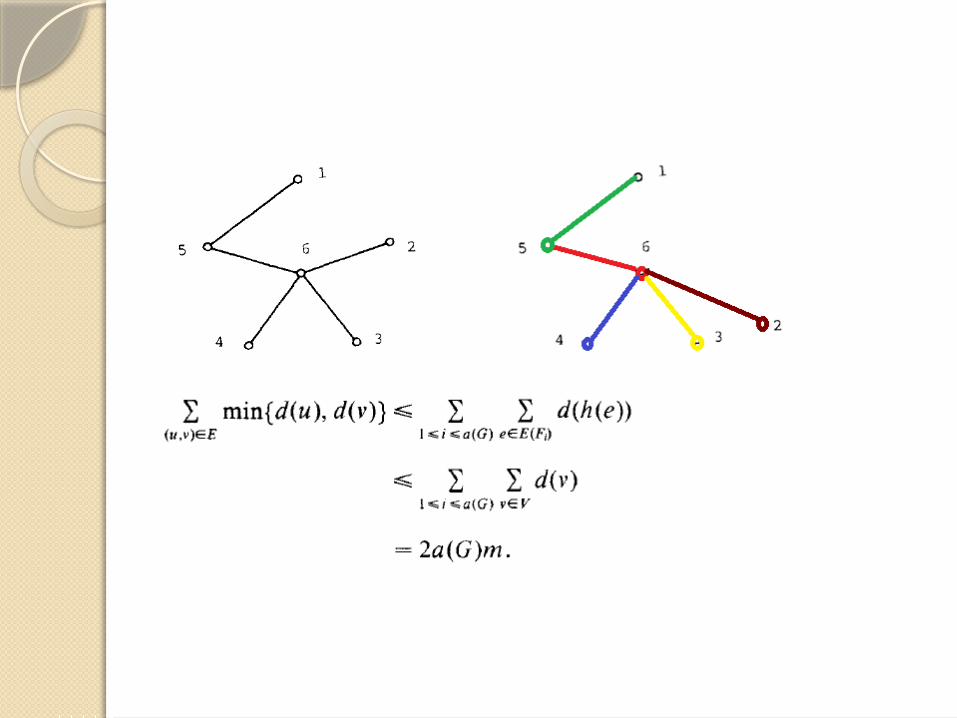
Lemma 8.2.
Proof. : the edge-disjoint spanning forests of G
such That
Associate each edge of with a vertex of G as follows:choose an arbitrary vertex u of each tree T in forest as the root of T;
regard T as a rooted tree with root u in which all the edges are directed from the
root to the descendants; and associate each edge e of tree T with the head
vertex h(e) of e. Thus, every vertex of except the roots, is associated with
exactly one edge of .
Listing TrianglesThe triangle detection problem often arises in many combinatorial
problems such as: the minimum cycle detection problem [IR78] the approximate Hamiltonian walk problem in maximal planar
graphs [NAW83] the approximate minimum vertex cover (or maximum independent
set) problem in planar graphs in [Alb74, BE821]
[IR78] : spends space and runs in time for general graphs and in O(n) time for planar graphs.
[BE821]: improved the space complexity of the algorithm from into O(n) by avoiding the use of the adjacency matrix.
2O(n ) 3/2O(m )
2O(n )
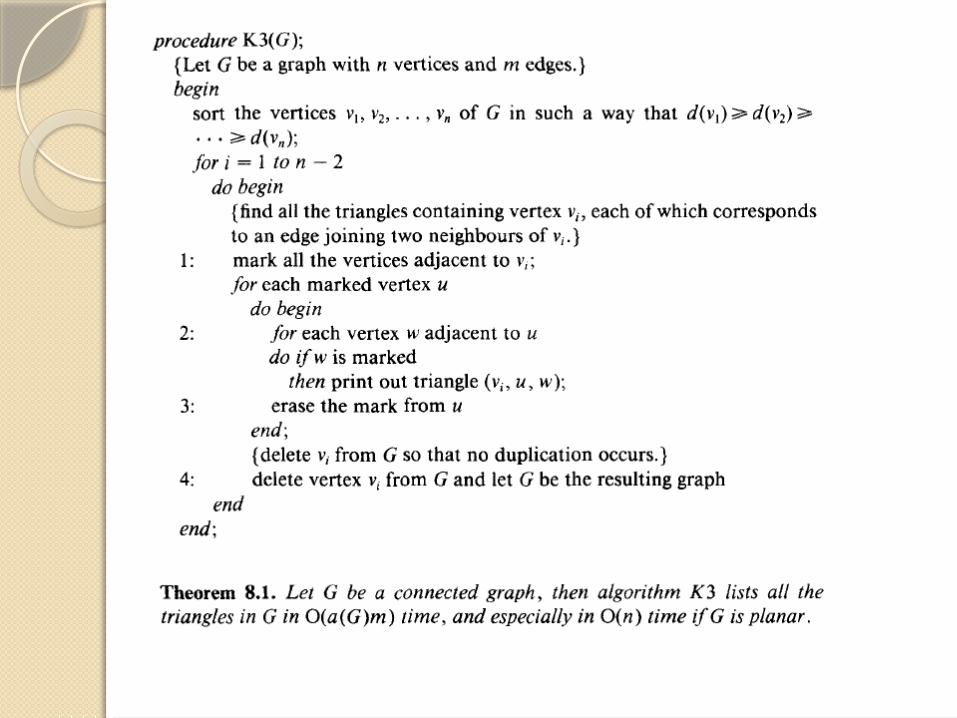
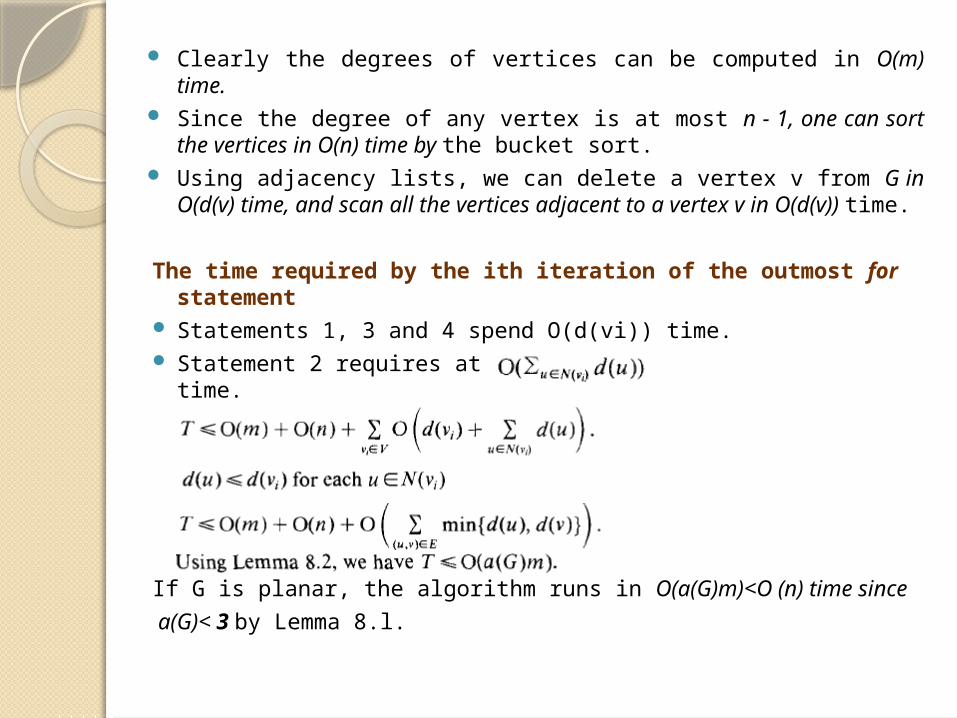
Clearly the degrees of vertices can be computed in O(m) time. Since the degree of any vertex is at most n - 1, one can sort the
vertices in O(n) time by the bucket sort. Using adjacency lists, we can delete a vertex v from G in O(d(v)
time, and scan all the vertices adjacent to a vertex v in O(d(v)) time.
The time required by the ith iteration of the outmost for statement Statements 1, 3 and 4 spend O(d(vi)) time. Statement 2 requires at most time.
If G is planar, the algorithm runs in O(a(G)m)<O (n) time since
a(G)< 3 by Lemma 8.l.
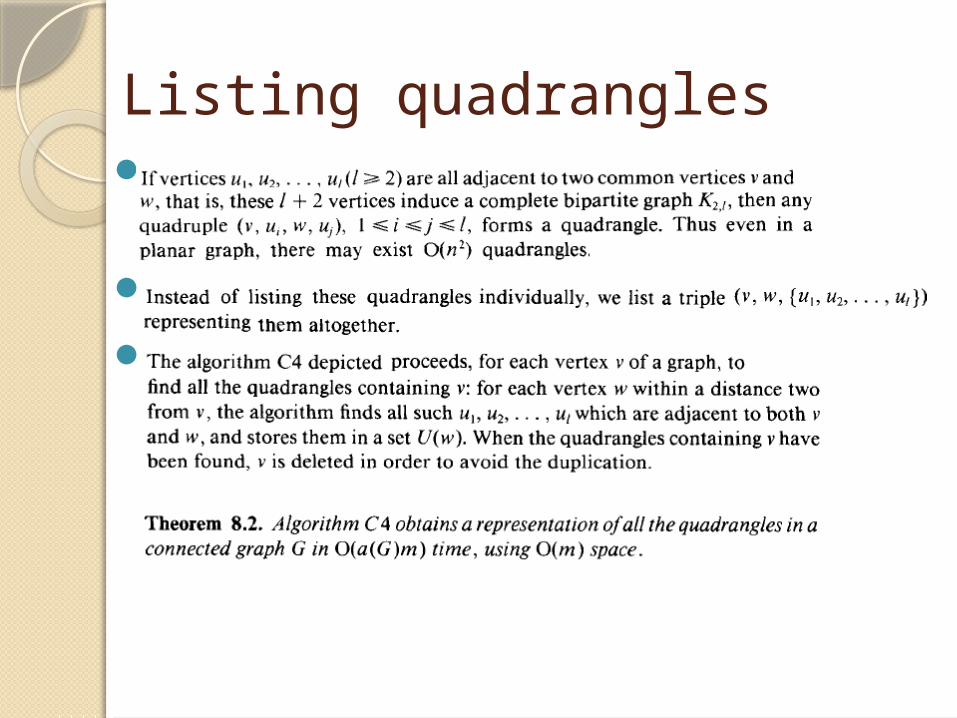
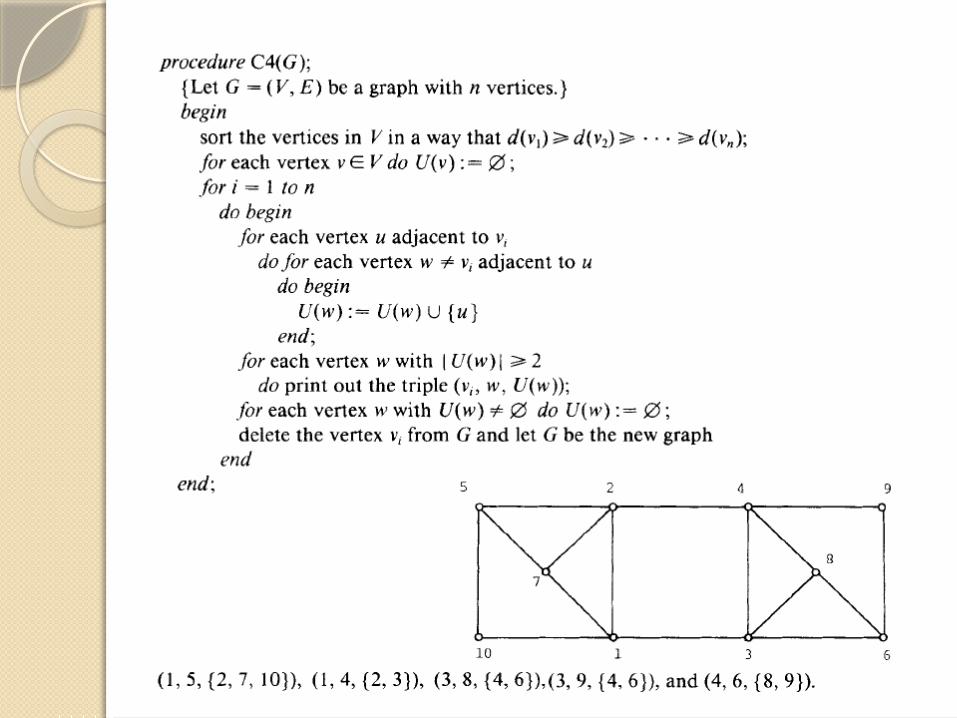
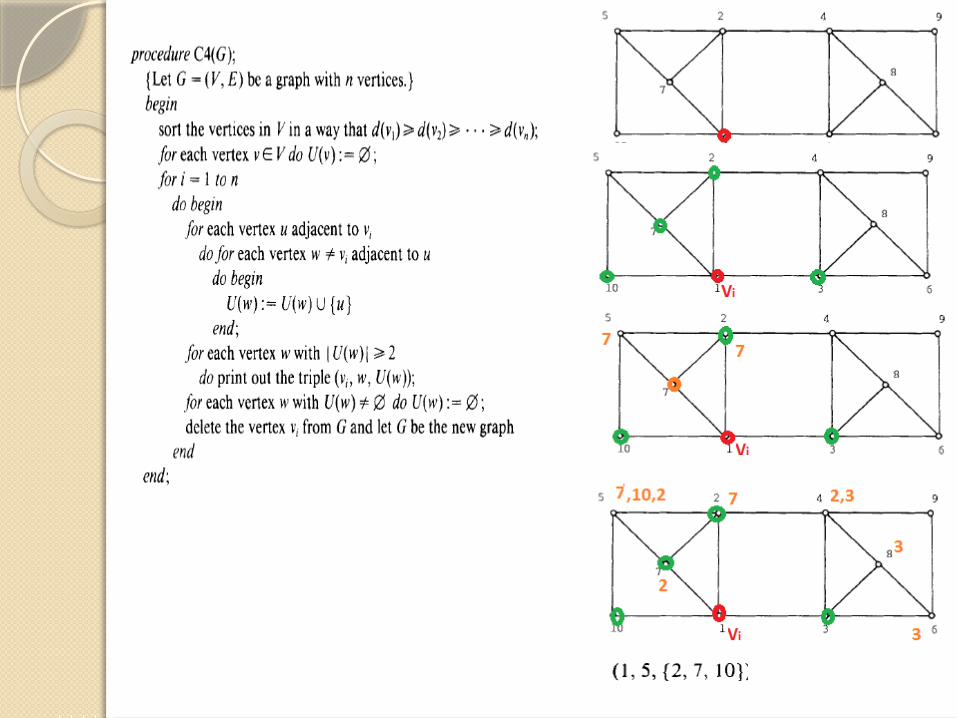
Listing quadrangles_
__
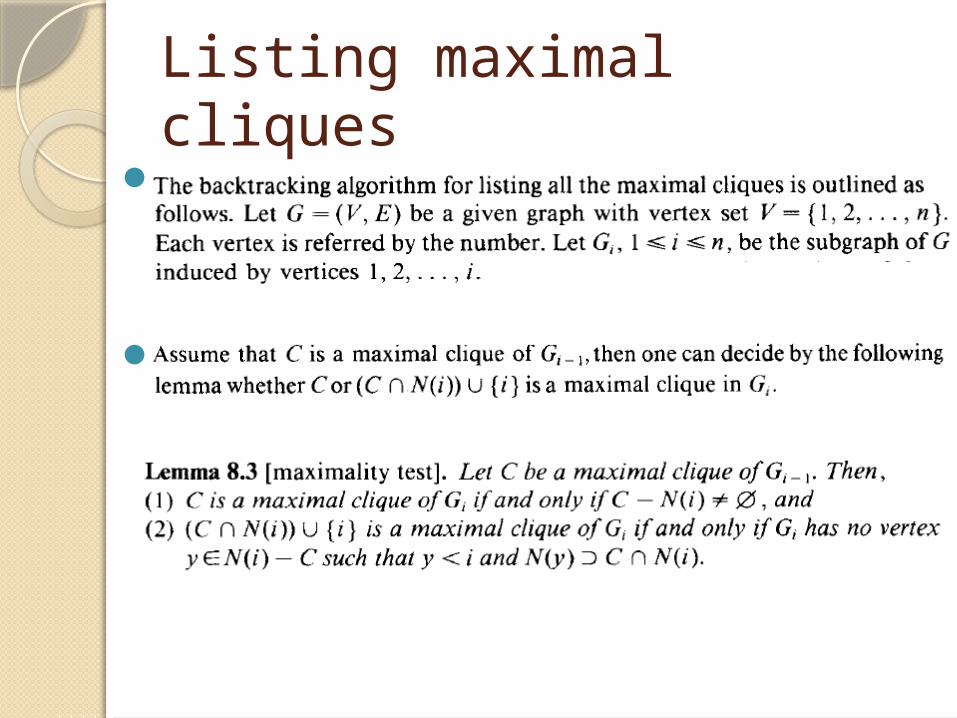
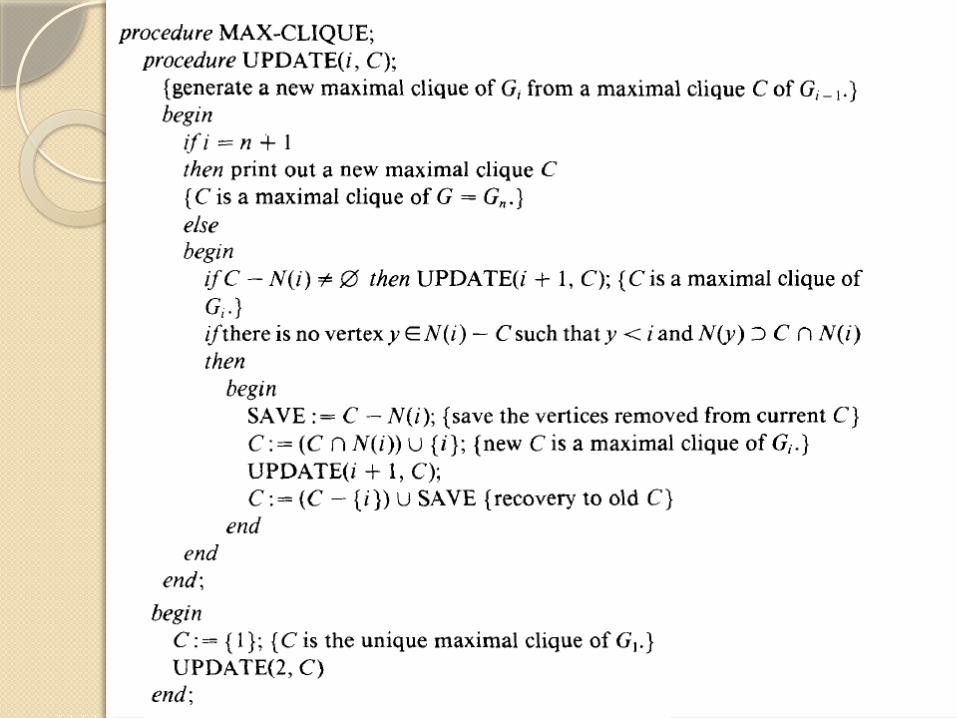
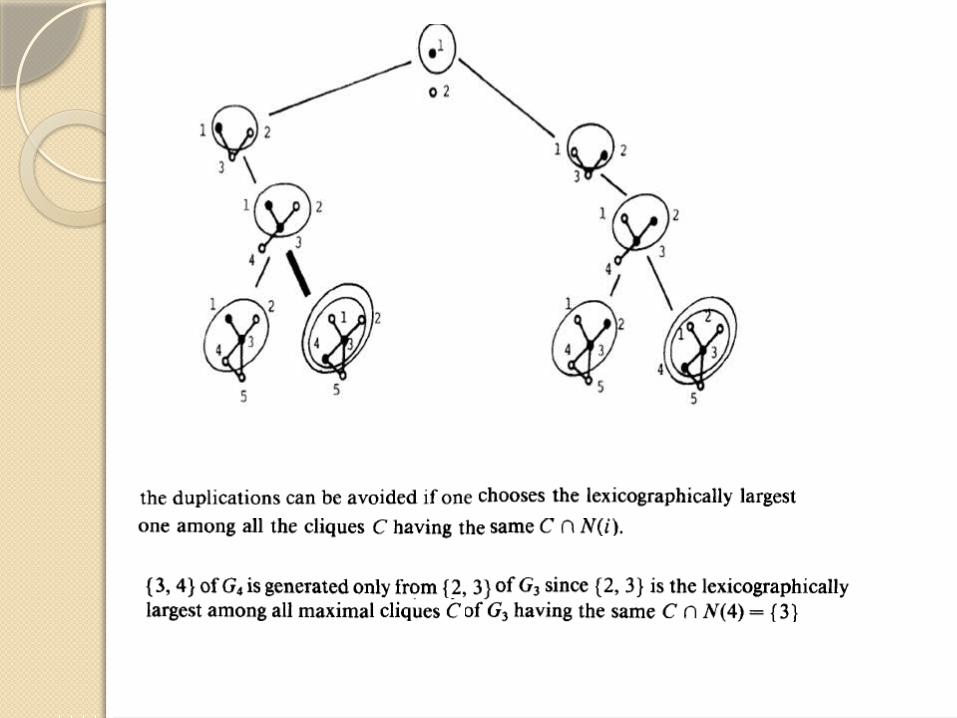
Listing maximal cliques_
_


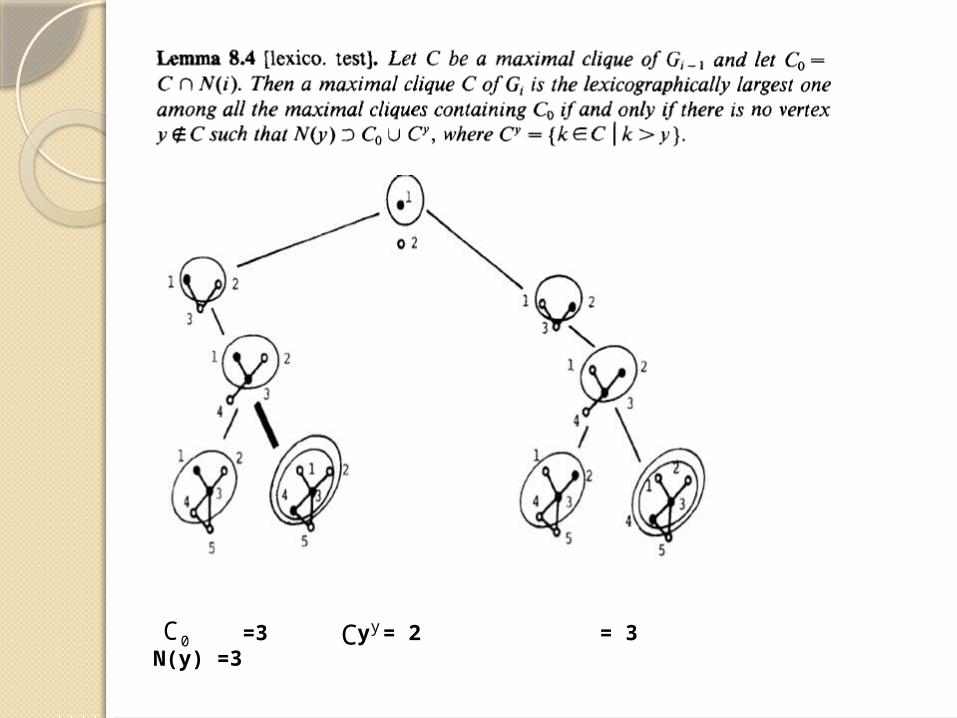
=3 y = 2 = 3 N(y) =3yC0C


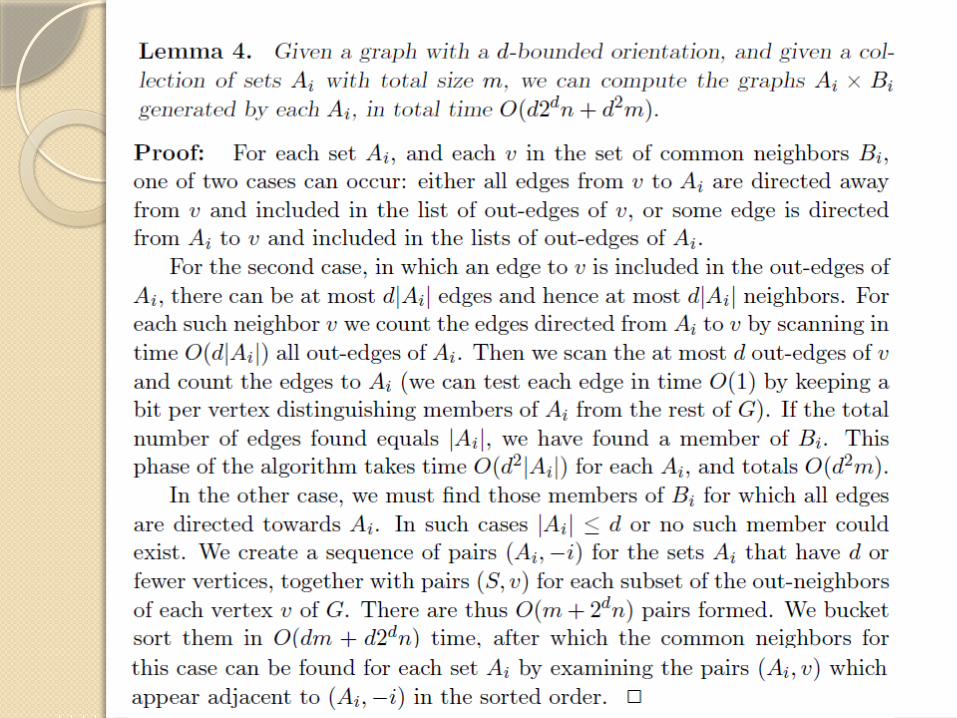
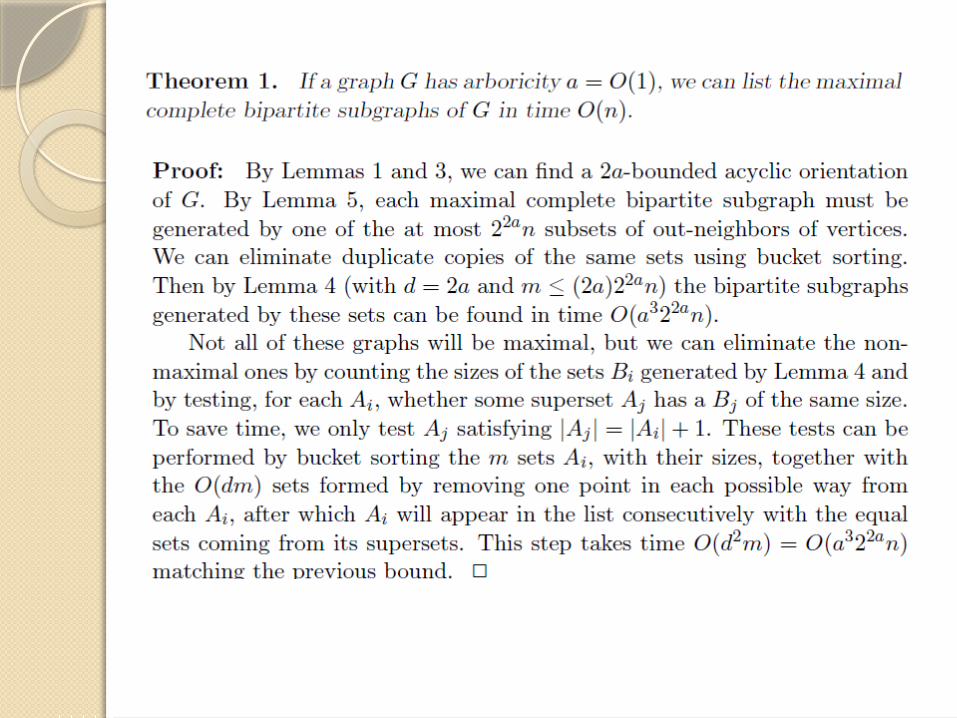
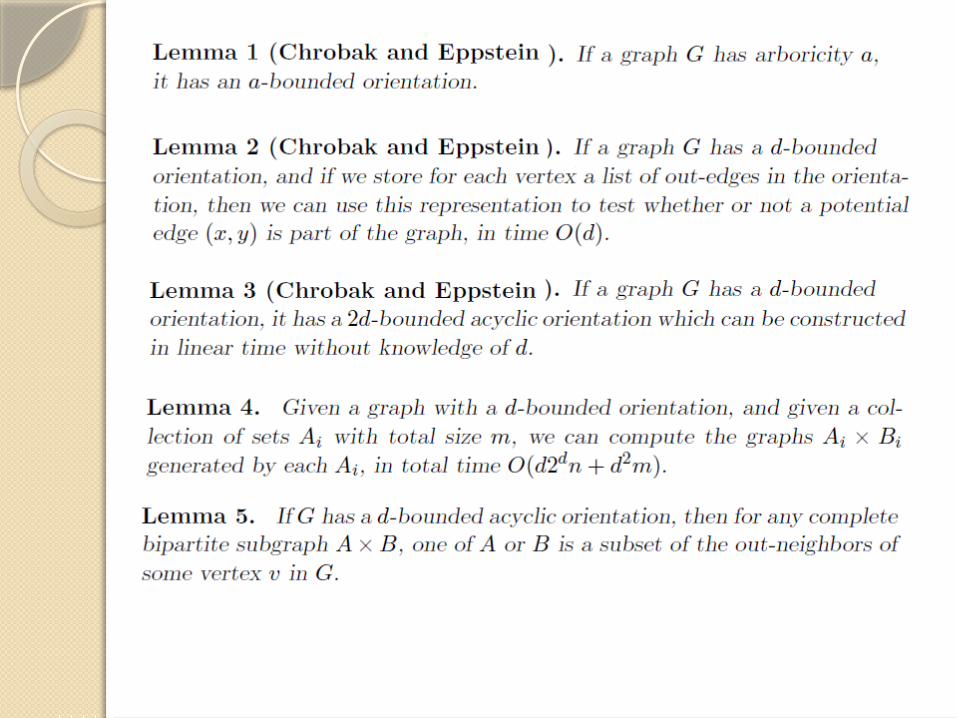
Bipartite Subgraph Listing Algorithms
Given any undirected graph G, a d-bounded orientation of G is simply an orientation in which each vertex has out-degree at most d.
An acyclic orientation is one in which there is no directed cycle. An advantage of acyclic orientations is that they are easy to
construct.

Thanks