system identification parameter estimation - tu delft ocw · system identification & parameter...
TRANSCRIPT
April 26 2010
DelftUniversity ofTechnology
System Identification &
Parameter Estimation
Lecture 9: Physical Modeling, Model and Parameter Accuracy
Wb2301: SIPE
Erwin de Vlugt, Dept. of Biomechanical Engineering (BMechE), Fac. 3mE
2SIPE, lecture 10 | xx
Contents• Parameter estimation in time domain
• resume previous lecture(s)
• Overview of an experiment • Basic steps in an ‘ideal’ experiment
• Parameter estimation in frequency domain:• Non-parametric models: frequency response function (FRF)
• Can be derived from ‘non-parametric’ time-domain models• Models with physical parameters
• Transfer function of model (as function of Laplace operator s)
• Model structure & model parameters: linear models
• Optimization algorithms: adapt model parameters for best fit in frequency
domain
3SIPE, lecture 10 | xx
Parameter estimation in time-domain
• ‘Non-parametric’ models:• ARMA, OE, Box-Jenkins, etc.
• Models with physical parameters• Input-output data, simulation of model (time domain) • Model structure & model parameters:
• linear and non-linear models
• Optimization algorithm:• adapt model parameters for best fit to simulation
• Note that ARX is a special case!• ARX is ‘linear in the parameters’: no simulation/optimization required!
4SIPE, lecture 10 | xx
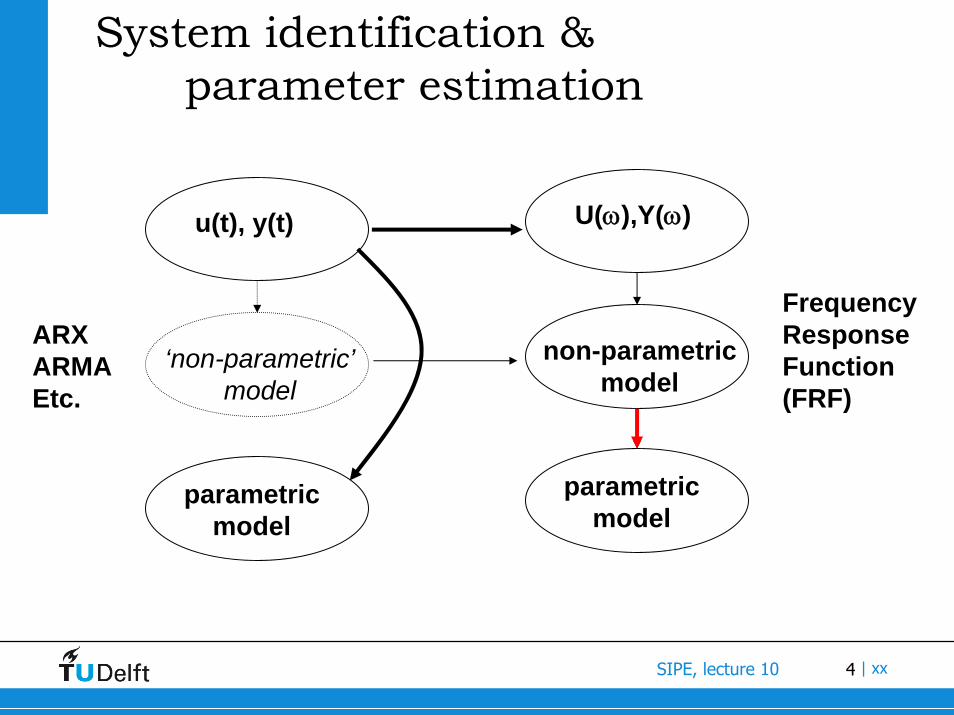
System identification & parameter estimation
u(t), y(t)
‘non-parametric’model
parametricmodel
U(ω),Y(ω)
non-parametricmodel
parametricmodel
ARXARMAEtc.
FrequencyResponseFunction(FRF)
5SIPE, lecture 10 | xx
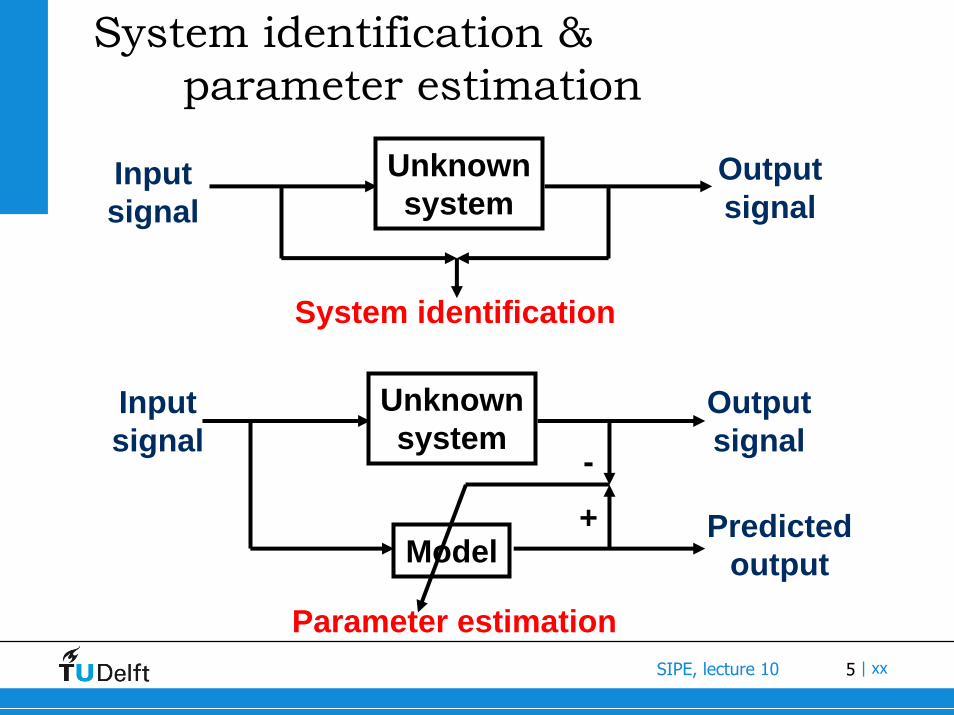
System identification & parameter estimation
Unknownsystem
Inputsignal
Outputsignal
System identification
Unknownsystem
Inputsignal
Outputsignal
ModelPredicted
output+
-
Parameter estimation
6SIPE, lecture 10 | xx
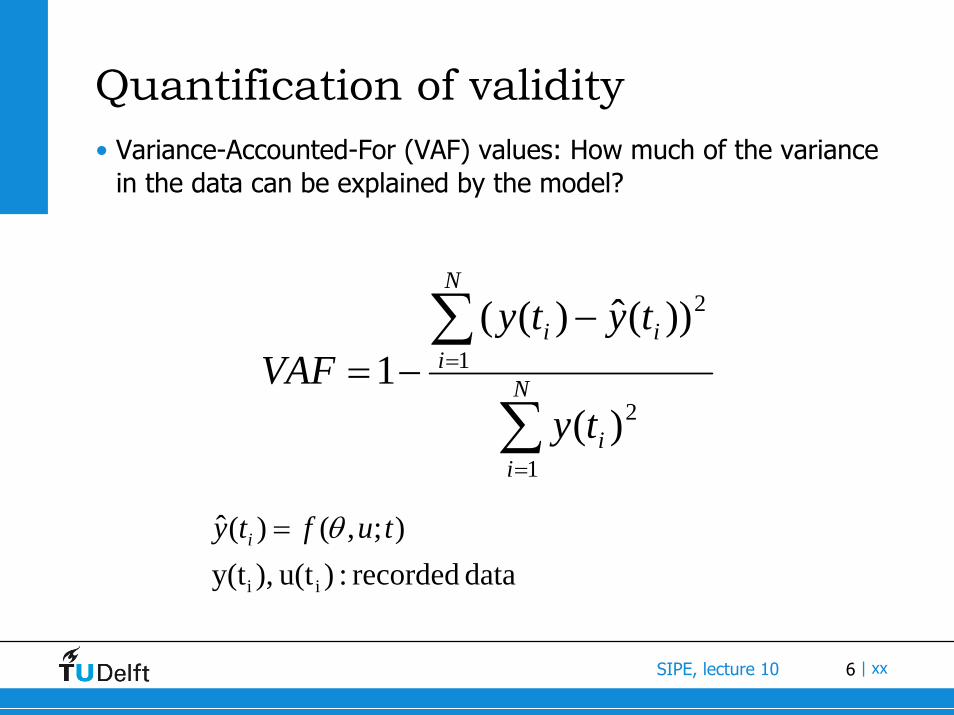
Quantification of validity• Variance-Accounted-For (VAF) values: How much of the variance
in the data can be explained by the model?
∑
∑
=
=
−−= N
ii
N
iii
ty
tytyVAF
1
2
1
2
)(
))(ˆ)((1
data recorded:)u(t ),y(t);,()(ˆ
ii
tufty i θ=
7SIPE, lecture 10 | xx
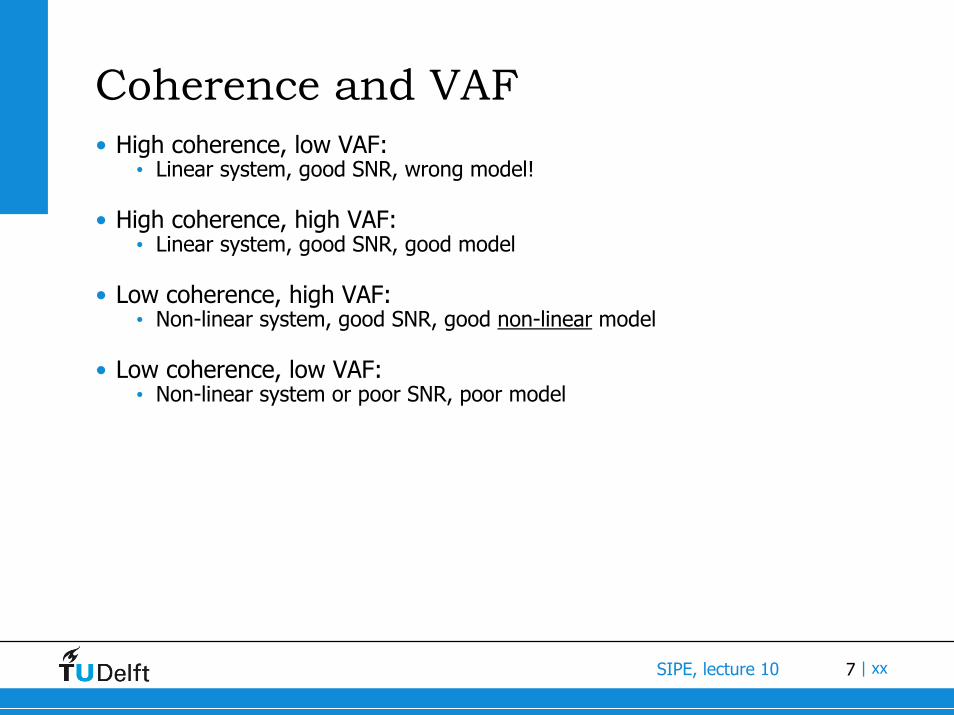
Coherence and VAF• High coherence, low VAF:
• Linear system, good SNR, wrong model!
• High coherence, high VAF:• Linear system, good SNR, good model
• Low coherence, high VAF:• Non-linear system, good SNR, good non-linear model
• Low coherence, low VAF:• Non-linear system or poor SNR, poor model
8SIPE, lecture 10 | xx
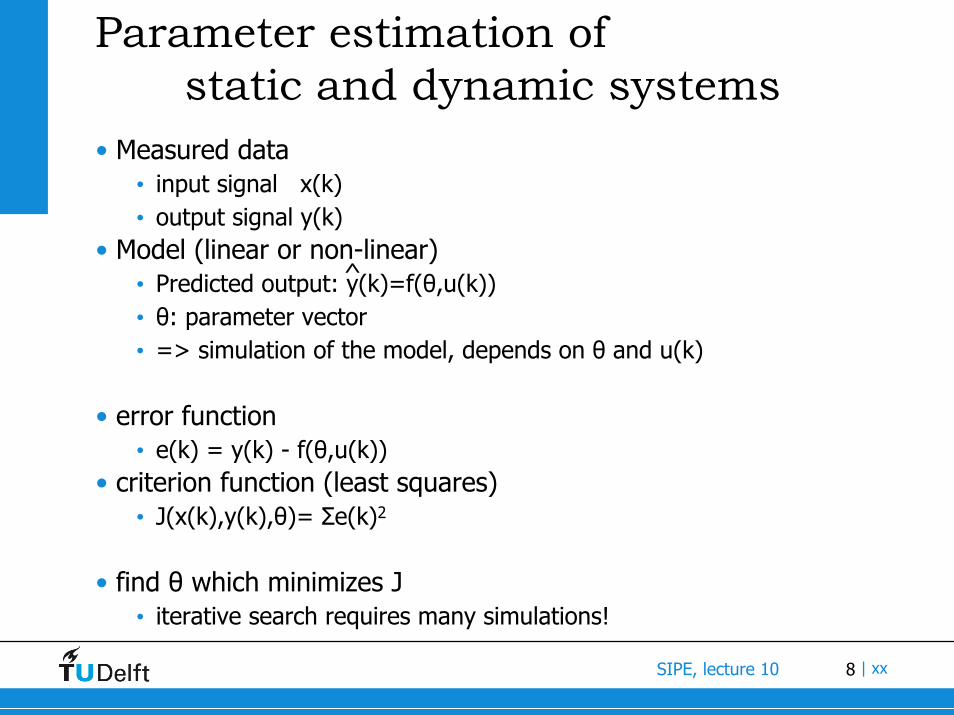
Parameter estimation of static and dynamic systems
• Measured data• input signal x(k)• output signal y(k)
• Model (linear or non-linear)• Predicted output: y(k)=f(θ,u(k))• θ: parameter vector• => simulation of the model, depends on θ and u(k)
• error function• e(k) = y(k) - f(θ,u(k))
• criterion function (least squares)• J(x(k),y(k),θ)= Σe(k)2
• find θ which minimizes J• iterative search requires many simulations!
^
9SIPE, lecture 10 | xx
Accuracy of parameter fit
• Single parameter:• SEM: ‘Standard Error of the Mean’
• Multiple parameters:• Covariance matrix• Estimated from Jacobian and residual error
10SIPE, lecture 10 | xx
‘Standard error of the mean’(SEM)
• How accurate can the parameters be estimated?• Example:
• Normal distribution of data xN: μx, σx
• Standard Error of the Mean:
• the more data samples to more accurate the estimation of the mean
N
Nx
x
x
x
σσ
σσ
μ
μ
=
= 22 1variance of the mean
standard error (deviation) of the mean
11SIPE, lecture 10 | xx
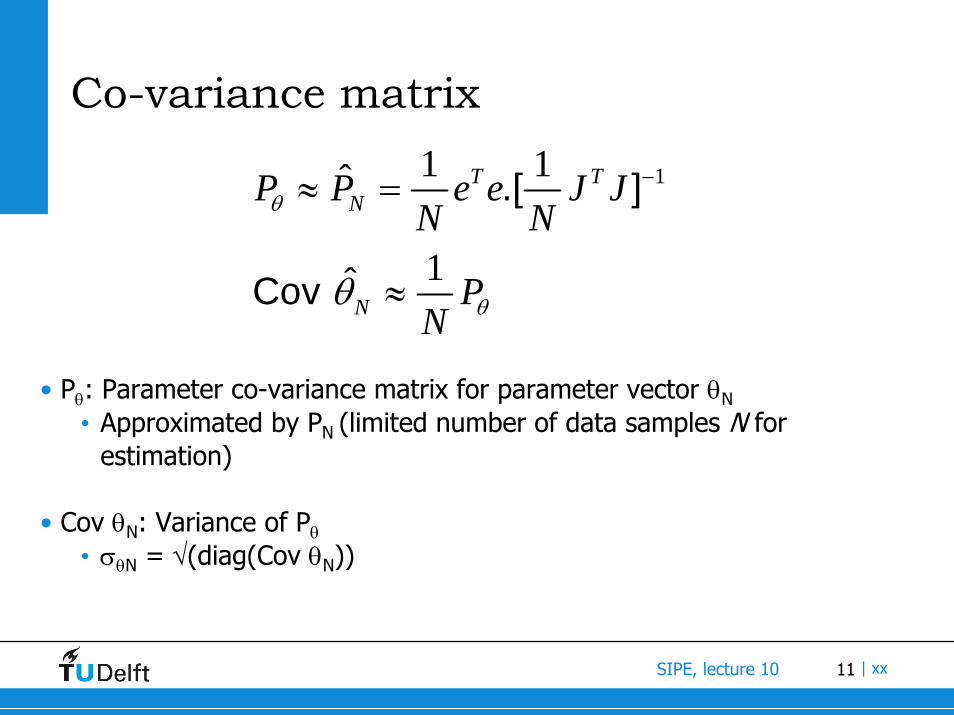
Co-variance matrix
• Pθ: Parameter co-variance matrix for parameter vector θN• Approximated by PN (limited number of data samples N for
estimation)
• Cov θN: Variance of Pθ
• σθN = √(diag(Cov θN))
11 1
1
ˆ .[ ]
ˆCov
T TN
N
P P e e J JN N
PN
θ
θθ
−≈ =
≈
12SIPE, lecture 10 | xx
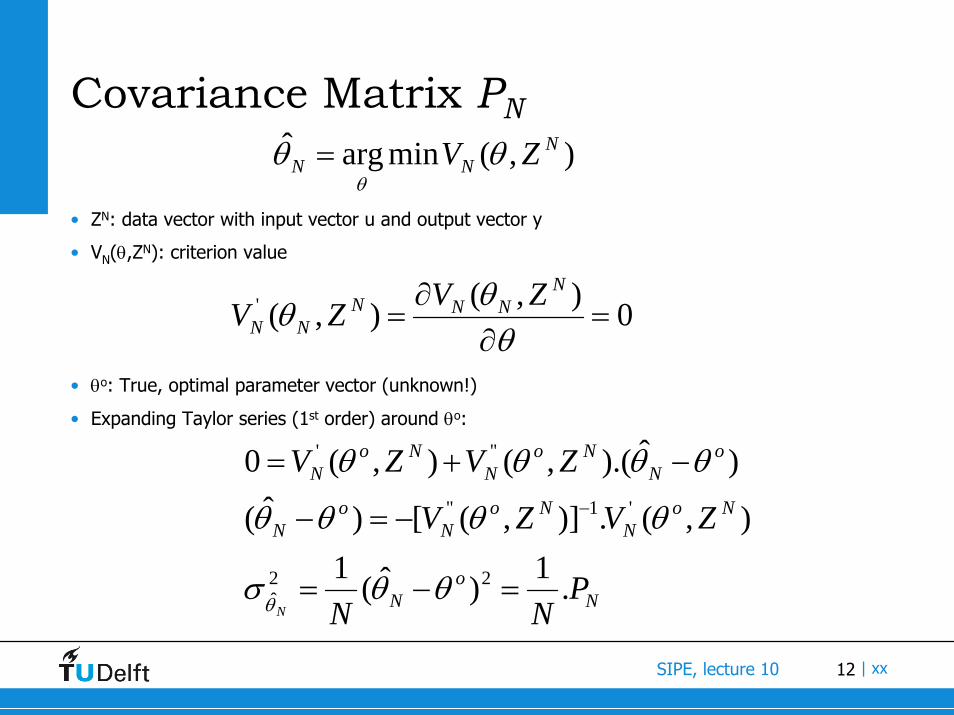
Covariance Matrix PN
• ZN: data vector with input vector u and output vector y
• VN(θ,ZN): criterion value
• θo: True, optimal parameter vector (unknown!)
• Expanding Taylor series (1st order) around θo:
),(minargˆ NNN ZV θθ
θ=
0),(),(' =∂
∂=
θθθ
NNNN
NNZVZV
No
N
NoN
NoN
oN
oN
NoN
NoN
PNN
ZVZV
ZVZV
N.1)ˆ(1
),(.)],([)ˆ(
)ˆ).(,(),(0
22ˆ
'1''
'''
=−=
−=−
−+=−
θθσ
θθθθ
θθθθ
θ
13SIPE, lecture 10 | xx
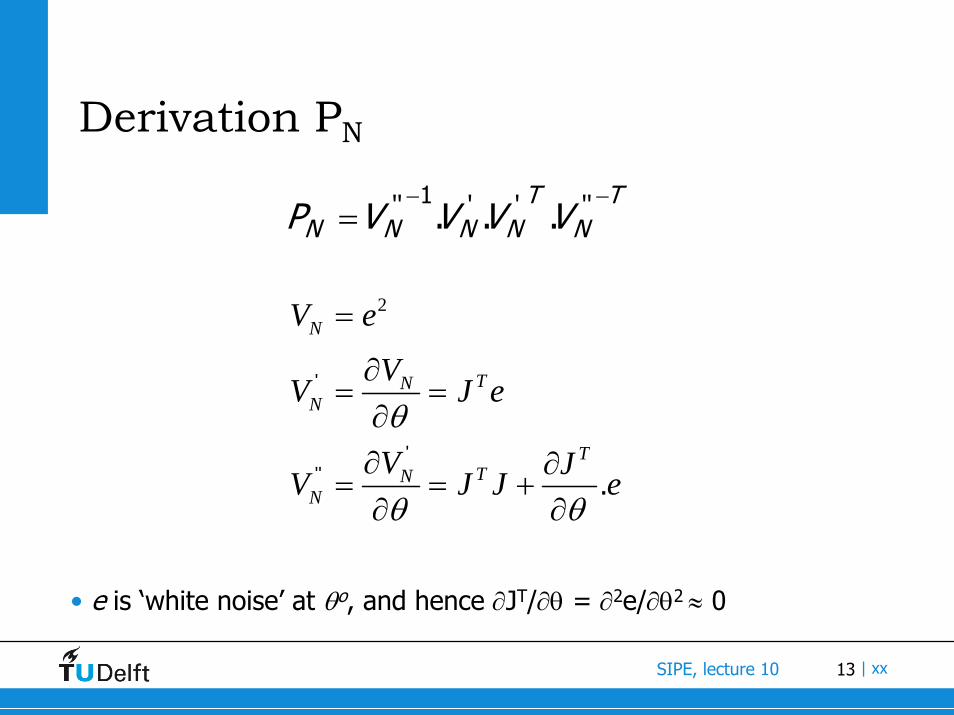
Derivation PN
• e is ‘white noise’ at θo, and hence ∂JT/∂θ = ∂2e/∂θ2 ≈ 0
TN
TNNNN VVVVP
−−= ''''1'' ...
2
'
''' .
N
TNN
TTN
N
V e
VV J e
V JV J J e
θ
θ θ
=
∂= =
∂∂ ∂
= = +∂ ∂
14SIPE, lecture 10 | xx
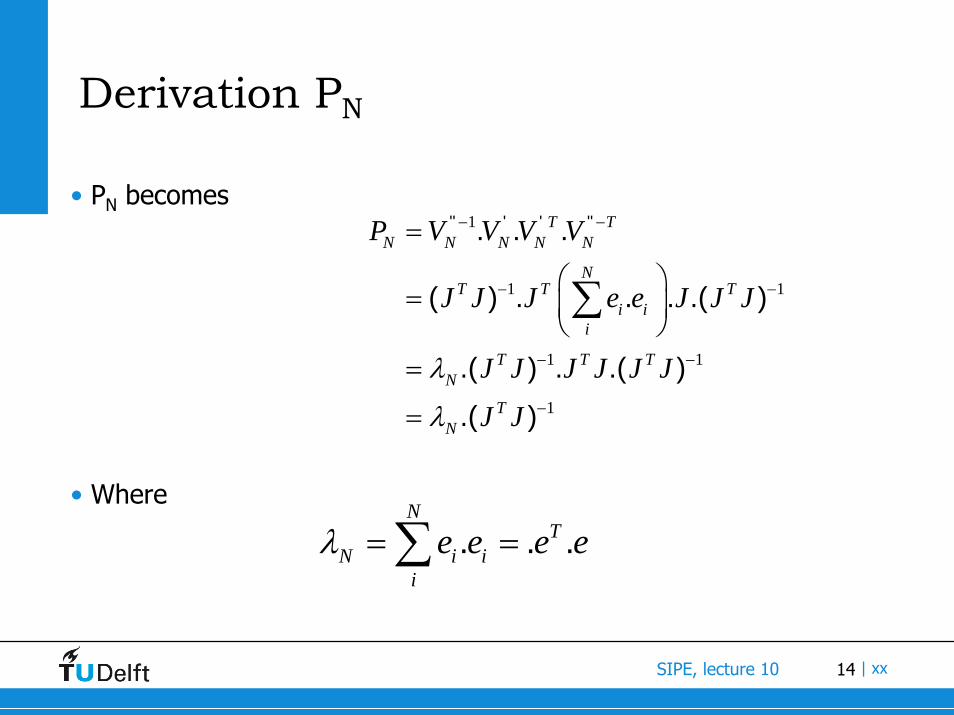
Derivation PN
• PN becomes
• Where
1
1 1
1 1
1
'' ' ' ''. . .
( ) . . . .( )
.( ) . .( )
.( )
T TN N N N N
NT T T
i ii
T T TN
TN
P V V V V
J J J e e J J J
J J J J J J
J J
λ
λ
− −
− −
− −
−
=
⎛ ⎞= ⎜ ⎟
⎝ ⎠=
=
∑
. . .N
TN i i
i
e e e eλ = =∑
15SIPE, lecture 10 | xx
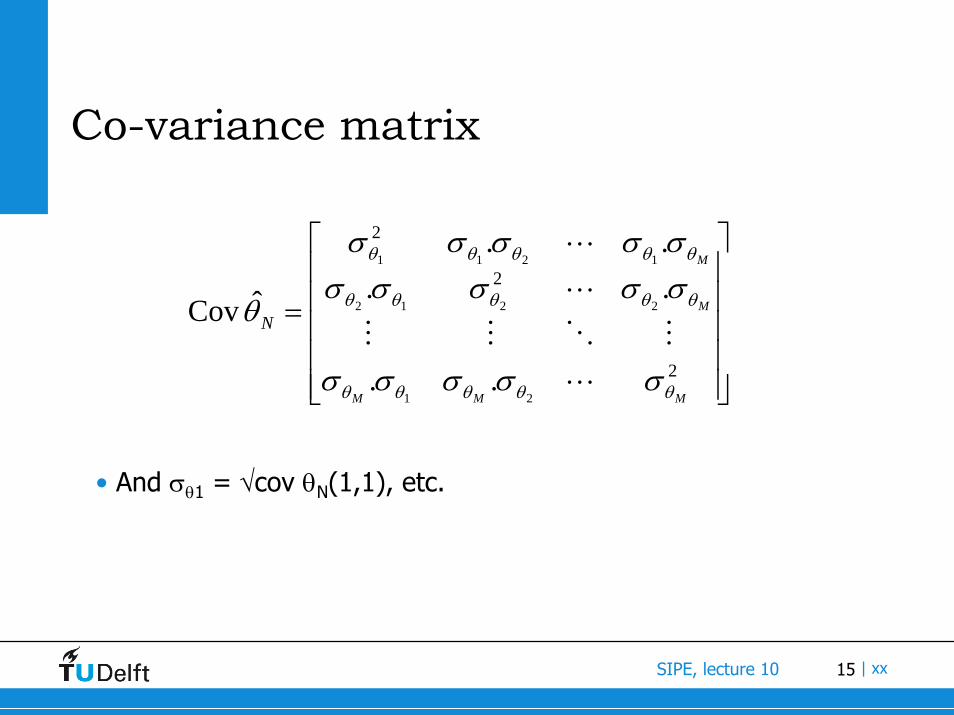
Co-variance matrix
• And σθ1 = √cov θN(1,1), etc.
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
2
2
2
21
2212
1211
..
..
..
ˆ Cov
MMM
M
M
N
θθθθθ
θθθθθ
θθθθθ
σσσσσ
σσσσσσσσσσ
θ
L
MOMM
L
L
16SIPE, lecture 10 | xx
Matlab demo: parameter accuracy
17SIPE, lecture 10 | xx
Basic ‘steps’ in identification scheme1. Prepare experiment
• Choose sample frequency, observation time, and number of repetitions
• Choose/design input signal
2. Perform experiment• Perform experiments with care and prevent possible noise sources
3. Analyze results• Check linearity! (e.g. coherence)• Open-loop or closed-loop algorithms required? • Do nonparametric analysis (FRF or ARX/OE/ARMAX)• Fit (parametric) model onto data• Check residue (should be small and preferably white)• Check validity (VAF) and parameter uncertainty (e.g. SEM)
18SIPE, lecture 10 | xx
1. Prepare experiment• Sample frequency
• Should be high enough to ‘see’ all relevant dynamics• High sample frequency will give more data (storage!) but will not
necessarily give more information! • Prevent aliasing
• Observation time• Determines resolution in frequency domain• In general longer is better (as long as system is time-invariant)
• Number of repetitions• Multiple observations => variations between observations
• Choose/design input signal• ‘persistently’ exciting => excite all relevant dynamics• Prevent leakage
19SIPE, lecture 10 | xx
2. Perform experiment• Perform experiments with care and prevent possible noise
sources• Electromagnetic interference?• Human subjects
• Unpredictable, to prevent anticipation
• clear instruction, no distractions, etc
• Often data can not be ‘fixed’ afterwards!
20SIPE, lecture 10 | xx
3. Analyze results• Check linearity
• Calculate coherence• Open-loop or closed-loop algorithms required?
• Try to make a block scheme• Do nonparametric analysis (FRF or ARX/OE/ARMAX e.d.)
• Bode diagram can give indication of system under investigation• Fit (parametric) model onto data
• Do a first check by inspecting the Bode diagram of data and model!
• Check residue (should be small and preferably white)• What is not captured with fitted model?
• Check validity of model (VAF) and parameter uncertainty (e.g. SEM)
21SIPE, lecture 10 | xx
Options in parameter estimationTime-domain:
• direct fit using derivatives (HMC: inverse dynamics)• Noise is amplified by differentiation
• direct fit using simulation (previous lecture)• Requires multiple model simulations:
a lot of CPU power• Can handle non-linear models!
22SIPE, lecture 10 | xx
Options in parameter estimation• Frequency-domain:
1. FFT, estimation of FRF, estimation of parameters• No prior assumptions are needed!• Can easily cope with systems in closed-loop• Estimates can be biased if (very) much noise is present• E.g. depends on number frequency bands used for averaging
2. OE/ARMAX fit, estimation of parameters• In general reasonable fast and accurate• Order selection is needed (requires a choice!)• Frequency reconstruction desired to estimate the model structure (if
system is unknown)
23SIPE, lecture 10 | xx
Error function in frequency domain
Simple approach:
• Wrong approach• Can give severely biased results
)()()(
)()(
mod
2
fHfHfe
fefJ
est
f
−=
=∑
24SIPE, lecture 10 | xx
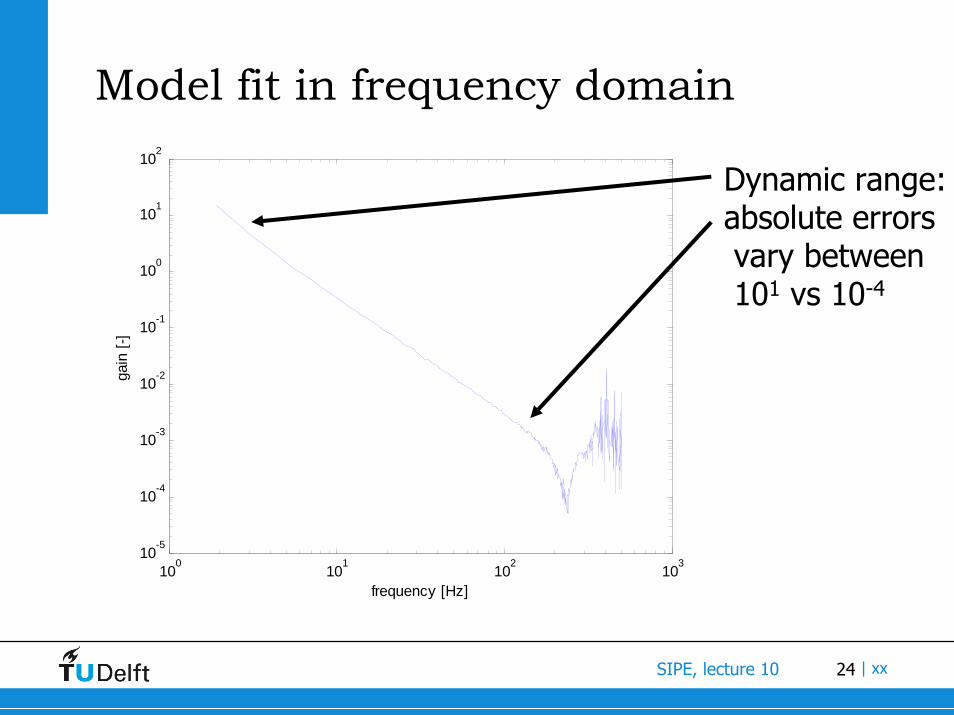
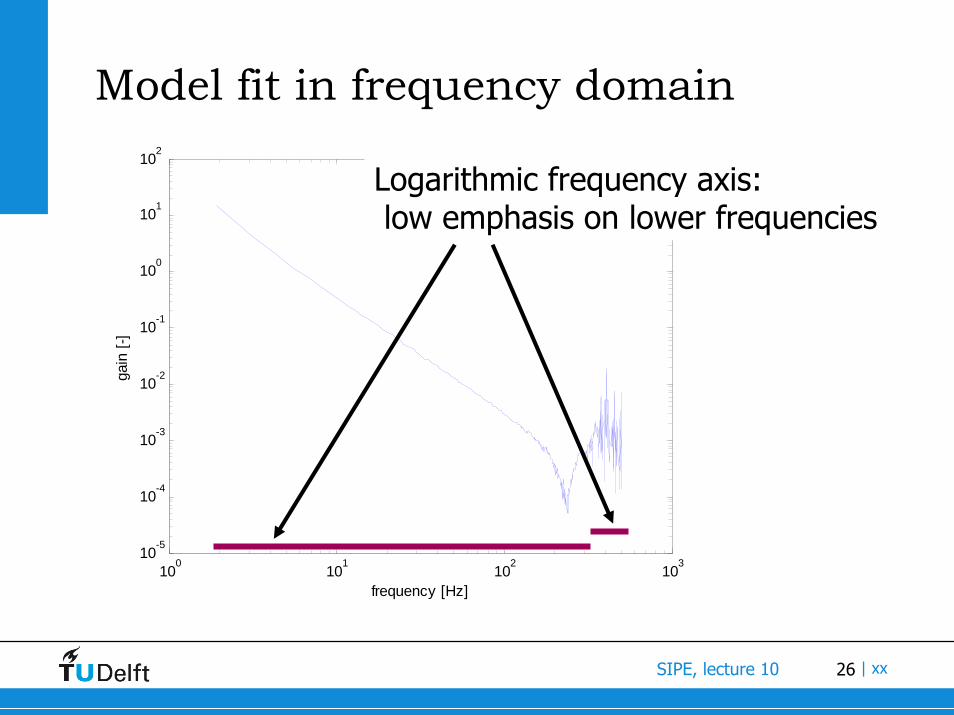
Model fit in frequency domain
100
101
102
103
10-5
10-4
10-3
10-2
10-1
100
101
102
frequency [Hz]
gain
[-]
Dynamic range:absolute errors vary between 101 vs 10-4
25SIPE, lecture 10 | xx
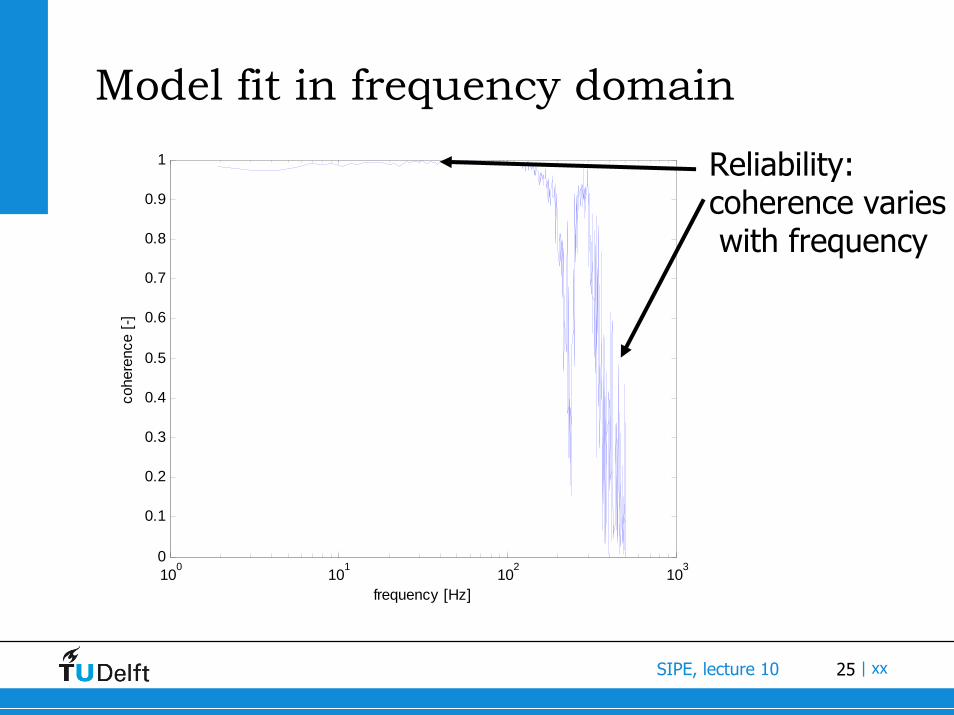
Model fit in frequency domain
100 101 102 1030
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
cohe
renc
e [-]
frequency [Hz]
Reliability:coherence varieswith frequency
26SIPE, lecture 10 | xx
Model fit in frequency domain
100
101
102
103
10-5
10-4
10-3
10-2
10-1
100
101
102
frequency [Hz]
gain
[-]
Logarithmic frequency axis:low emphasis on lower frequencies
27SIPE, lecture 10 | xx
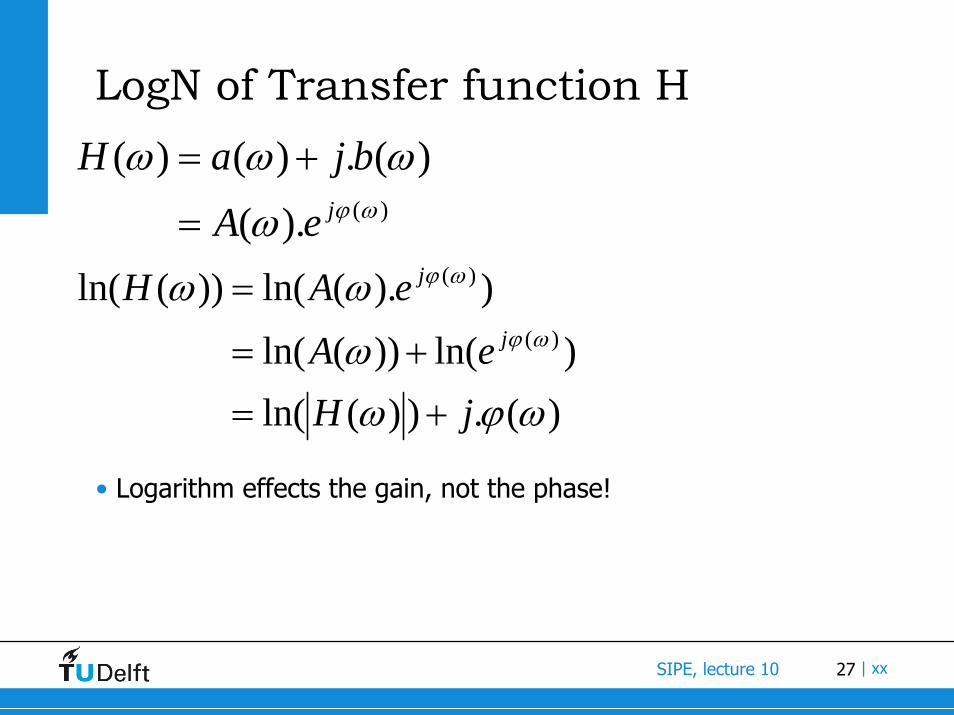
LogN of Transfer function H
)().()(.)()(
ωϕω
ωωωjeA
bjaH=
+=
)(.))(ln()ln())(ln(
)).(ln())(ln()(
)(
ωϕωω
ωωωϕ
ωϕ
jHeA
eAHj
j
+=
+=
=
• Logarithm effects the gain, not the phase!
28SIPE, lecture 10 | xx
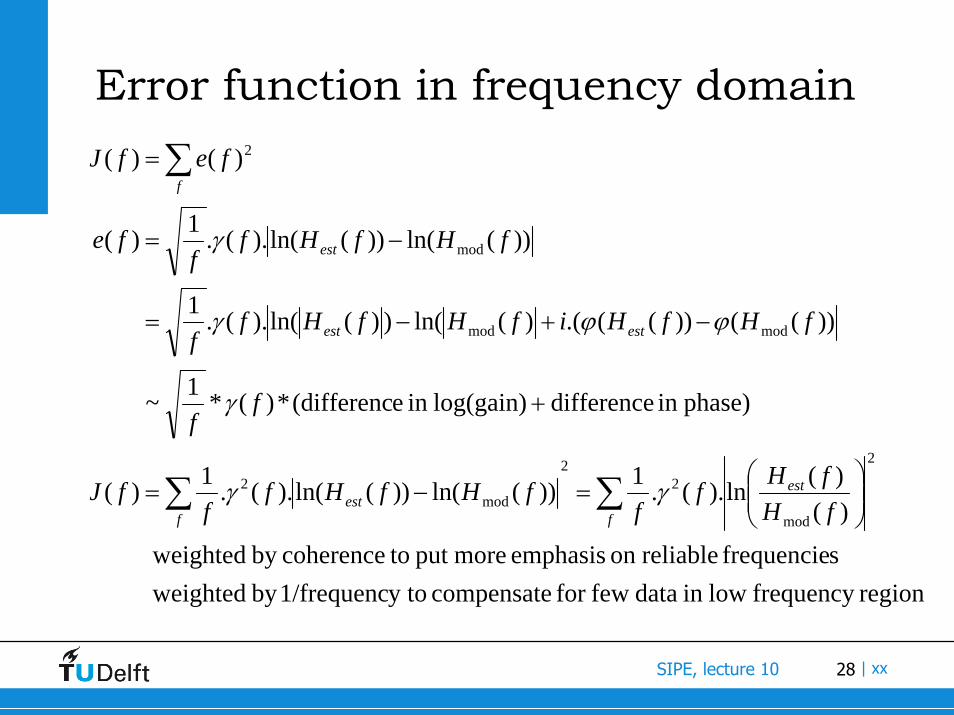
Error function in frequency domain
regionfrequency lowin data fewfor compensate y to1/frequencby weightedsfrequencie reliableon emphasis moreput tocoherenceby weighted
)()(ln).(.1))(ln())(ln().(.1)(
phase)in difference log(gain)in e(differenc*)(*1 ~
))(())((.()(ln())(ln().(.1
))(ln())(ln().(.1)(
)()(
2
mod
22
mod2
modmod
mod
2
∑∑
∑
⎟⎟⎠
⎞⎜⎜⎝
⎛=−=
+
−+−=
−=
=
f
est
fest
estest
est
f
fHfHf
ffHfHf
ffJ
ff
fHfHifHfHff
fHfHff
fe
fefJ
γγ
γ
ϕϕγ
γ
29SIPE, lecture 10 | xx
Error function in frequency domainExample:measurements on a mass-spring-damper system
KfjBfjMKsBsMfH
fSfS
fH
fHfHf
ffHfHf
ffe
fefJ
uu
uyest
estest
f
++=
++=
=
⎟⎟⎠
⎞⎜⎜⎝
⎛=−=
=∑
.2.).2.(1
..1)(
)()(
)(
)()(ln).(.1))(ln())(ln().(.1)(
)()(
22mod
modmod
2
ππ
γγ
30SIPE, lecture 10 | xx
Assignment this week• Estimate parameters in time and frequency domain• Compare the results between both approaches
• Goal: Show the (dis-)advantages and peculiarities of estimation in both time domain and frequency domain (and compare the two approaches)