taller matematicas avanzadas
DESCRIPTION
taller de matematicas avanzadasTRANSCRIPT

NOMBRE: Daniel Bocanegra Rincón - Sergio Macías COD. 2111995 2111 ASIGNATURA: Matemáticas Avanzadas DOCENTE: Jorge Villamizar
PRIMERA ENTREGA DE EJERCICIOS DE MATEMÁTICAS AVANZADAS.
Espacios Vectoriales:
GROSSMAN, Stanley. Algebra Lineal. 𝟓𝒕𝒂 𝑬𝒅𝒊𝒄𝒊ó𝒏.
Pág. 298
2). Determine si el conjunto dado es un espacio vectorial, si no lo es, enuncie los axiomas que no se cumplen.
Sea V el Conjunto de matrices diagonales de 𝑛 𝑥 𝑛, bajo la multiplicación (es decir, 𝐴 ⊙ 𝐵 = 𝐴𝐵).
Sol.
Axioma 1. Sean 𝐴, 𝐵 ∈ 𝑉, Entonces 𝐴 + 𝐵 ∈ 𝑉
𝐴 = [
𝑎11 00 𝑎22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑎𝑛𝑛
] Y B= [
𝑏11 00 𝑏22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑏𝑛𝑛
]
𝐴 + 𝐵 = [
𝑎11 + 𝑏11 00 𝑎22 + 𝑏_22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑎𝑛𝑛 + 𝑏𝑛𝑛
]
Dado que la suma de dos matrices diagonales dará como resultado otra matriz diagonal, entonces es posible decir que la matriz A+B pertenece al conjunto V, se cumple el axioma 1.

Axioma 2. Sean 𝑋, 𝑌, 𝑍 ∈ 𝑉, Entonces (𝑋 + 𝑌) + 𝑍 = 𝑋 + (𝑌 + 𝑍).
𝑋 = [
𝑥11 00 𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑥𝑛𝑛
] Y= [
𝑦11 00 𝑦22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑦𝑛𝑛
] 𝑍 = [
𝑧11 00 𝑧22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑧𝑛𝑛
]
(𝑿 + 𝒀) + 𝒁 = 𝑿 + (𝒀 + 𝒁) ¿?
[
𝑥11 + 𝑦11 00 𝑥22 + 𝑦22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑥𝑛𝑛 + 𝑦𝑛𝑛
] + [
𝑧11 00 𝑧22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑧𝑛𝑛
] = [
𝑥11 00 𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑥𝑛𝑛
] + [
𝑦11 + 𝑧11 00 𝑦11 + 𝑧11
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑦𝑛𝑛 + 𝑧𝑛𝑛
]
[𝑥11 + 𝑦11 + 𝑧11 ⋯ 0
⋮ ⋱ ⋮0 ⋯ 𝑥𝑛𝑛 + 𝑦𝑛𝑛 + 𝑧𝑛𝑛
] = [𝑥11 + 𝑦11 + 𝑧11 ⋯ 0
⋮ ⋱ ⋮0 ⋯ 𝑥𝑛𝑛 + 𝑦𝑛𝑛 + 𝑧𝑛𝑛
]
Se cumple entonces el segundo axioma.
Axioma 3. ∀ 𝐴 ∈ 𝑉 ∃ 𝑀 ∈ 𝑉 ∶ 𝐴 + 𝑀 = 𝐴.
𝐴 = [
𝑎11 00 𝑎22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑎𝑛𝑛
] ; 𝑀 = [
𝑚11 00 𝑚22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑚𝑛𝑛
]
𝐴 + 𝑀 = [
𝑎11 + 𝑚11 00 𝑎22 + 𝑚22
… 0… 0
⋮ ⋮0 0
⋮ … 𝑎𝑛𝑛 + 𝑚22
]
𝑎𝑖𝑖 + 𝑚𝑖𝑖 = 𝑎𝑖𝑖 ⇒ 𝑚𝑖𝑖 = 0 ; 𝑑𝑒𝑏𝑖𝑑𝑜 𝑎 𝑞𝑢𝑒 𝑒𝑠𝑡𝑎 𝑜𝑝𝑒𝑟𝑎𝑐𝑖𝑜𝑛 𝑜𝑐𝑢𝑟𝑟𝑒 𝑒𝑛 ℝ
𝑀 = [
0 00 0
… 0… 0
⋮ ⋮0 0
⋮ 0… 0
]
Entonces se cumple el axioma 3.

Axioma 4. ∀ 𝐴 ∈ 𝑉 ∃ 𝐼 ∈ 𝑉 ∶ 𝐴 + 𝐼 = 𝑀.
𝐴 = [
𝑎11 00 𝑎22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑎𝑛𝑛
] ; 𝐼 = [
𝑖11 00 𝑖22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑖𝑛𝑛
]
𝑨 + 𝑰 = 𝑴 ¿?
𝐴 + 𝑀 = [
𝑎11 + 𝑖11 00 𝑎22 + 𝑖22
… 0… 0
⋮ ⋮0 0
⋮ … 𝑎𝑛𝑛 + 𝑖22
]
𝑎𝑖𝑖 + 𝑖𝑖𝑖 = 0 ⇒ 𝑖𝑖𝑖 = −𝑎𝑖𝑗 ; 𝑑𝑒𝑏𝑖𝑑𝑜 𝑎 𝑞𝑢𝑒 𝑒𝑠𝑡𝑎 𝑜𝑝𝑒𝑟𝑎𝑐𝑖𝑜𝑛 𝑜𝑐𝑢𝑟𝑟𝑒 𝑒𝑛 ℝ
𝐼 = [
−𝑎11 00 −𝑎22
… 0… 0
⋮ ⋮0 0
⋮ 0… −𝑎𝑛𝑛
]
Se cumple entonces el axioma 4.
Axioma 5. ∀ 𝑋, 𝑌 ∈ 𝑉 ⇒ 𝑋 + 𝑌 = 𝑌 + 𝑋
𝑋 = [
𝑥11 00 𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑥𝑛𝑛
] ; 𝑌 = [
𝑦11 00 𝑦22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑦𝑛𝑛
]
𝑿 + 𝒀 = 𝒀 + 𝑿 ¿?
[
𝑥11 + 𝑦11 00 𝑥22 + 𝑦22
… 0… 0
⋮ ⋮0 0
⋮ … 𝑥𝑛𝑛 + 𝑦22
] = [
𝑦11 + 𝑥11 00 𝑦22 + 𝑥22
… 0… 0
⋮ ⋮0 0
⋮ … 𝑦𝑛𝑛 + 𝑥22
]
Debido a que las operaciones que ocurren en cada posición de la matriz obedecen a las propiedades de los ℝ, por la propiedad conmutativa de la suma para los reales podemos decir entonces que 𝑥𝑖𝑖 + 𝑦𝑖𝑖 = 𝑦𝑖𝑖 + 𝑥𝑖𝑖, y por tanto 𝑋 + 𝑌 = 𝑌 + 𝑋, de este modo se cumple el axioma 5.

Axioma 6. ∀ 𝑋 ∈ 𝑉 𝑦 𝛼 𝑒𝑠𝑐𝑎𝑙𝑎𝑟 ⇒ 𝛼𝑋 ∈ 𝑉.
𝑋 = [
𝑥11 00 𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑥𝑛𝑛
] ; 𝛼𝑋 = [
𝛼𝑥11 00 𝛼𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝛼𝑥𝑛𝑛
]
Realizando una inspección simple, podemos notar que la matriz X al multiplicarla bajo la condición de multiplicación de este ejercicio seguirá siendo una matriz diagonal y su dimensión no cambiara, por tanto se cumple el axioma 6. Axioma 7. 𝑠𝑒𝑎 𝑋, 𝑌 ∈ 𝑉 𝑦 𝛼 𝑒𝑠𝑐𝑎𝑙𝑎𝑟 ⇒ 𝛼(𝑋 + 𝑌) = 𝛼𝑋 + 𝛼𝑌.
𝑋 = [
𝑥11 00 𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑥𝑛𝑛
] ; 𝑌 = [
𝑦11 00 𝑦22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑦𝑛𝑛
]
𝜶(𝑿 + 𝒀) = 𝜶𝑿 + 𝜶𝒀 ¿?
𝛼 ∗ [
𝑥11 + 𝑦11 00 𝑥22 + 𝑦22
… 0… 0
⋮ ⋮0 0
⋮ … 𝑥𝑛𝑛 + 𝑦22
] = [
𝛼𝑥11 00 𝛼𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝛼𝑥𝑛𝑛
] +
[ 𝛼𝑦11 0
0 𝛼𝑦22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝛼𝑦𝑛𝑛]
[
𝛼(𝑥11 + 𝑦11) 00 𝛼(𝑥22 + 𝑦22)
… 0… 0
⋮ ⋮0 0
⋮ … 𝛼(𝑥𝑛𝑛 + 𝑦22)
] = [
𝛼𝑥11 + 𝛼𝑦11 00 𝛼𝑥22 + 𝛼𝑦22
… 0… 0
⋮ ⋮0 0
⋮ … 𝛼𝑥𝑛𝑛 + 𝛼𝑦22
]
Debido a que las operaciones que ocurren en cada posición de la matriz obedecen a las propiedades de los ℝ, entonces podemos decir que 𝛼(𝑥𝑖𝑖 + 𝑦𝑖𝑖) = 𝛼𝑥𝑖𝑖 + 𝛼𝑦𝑖𝑖 y por ende se cumple el axioma 7. Axioma 8. 𝑆𝑒𝑎 𝑋 ∈ 𝑉 𝑦 𝛼, 𝛽 𝑒𝑠𝑐𝑎𝑙𝑎𝑟𝑒𝑠 ⇒ (𝛼 + 𝛽)𝑋 = 𝛼𝑋 + 𝛽𝑋.
𝑋 = [
𝑥11 00 𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑥𝑛𝑛
] ; (𝜶 + 𝜷)𝑿 = 𝜶𝑿 + 𝜷𝑿 ¿?
[
(𝛼 + 𝛽)𝑥11 00 (𝛼 + 𝛽)𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… (𝛼 + 𝛽)𝑥𝑛𝑛
] = [
𝛼𝑥11 00 𝛼𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝛼𝑥𝑛𝑛
] [
𝛽𝑥11 00 𝛽𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝛽𝑥𝑛𝑛
]
[
(𝛼 + 𝛽)𝑥11 00 (𝛼 + 𝛽)𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… (𝛼 + 𝛽)𝑥𝑛𝑛
] = [
𝛼𝑥11 + 𝛽11𝑥11 00 𝛼𝑥22 + 𝛽11𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝛼𝑥𝑛𝑛 + 𝛽𝑛𝑛
]
Debido a que las operaciones que ocurren en cada posición de la matriz obedecen a las propiedades de los ℝ, entonces podemos decir que (𝛼 + 𝛽)𝑥𝑖𝑖 = 𝛼𝑥𝑖𝑖 + 𝛽𝑥𝑖𝑖 y por ende se cumple el axioma 8.
Axioma 9. 𝑆𝑒𝑎 𝑋 ∈ 𝑉 𝑦 𝛼, 𝛽 𝑒𝑠𝑐𝑎𝑙𝑎𝑟𝑒𝑠 ⇒ 𝛼(𝛽𝑋) = (𝛼𝛽)𝑋.
𝑋 = [
𝑥11 00 𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑥𝑛𝑛
] ; 𝜶(𝜷𝑿) = (𝜶𝜷)𝑿 ¿?
𝛼 ∗ [
𝛽𝑥11
0
0 𝛽𝑥22
… 0
… 0
⋮ ⋮
0 0
⋮ 0
… 𝛽𝑥𝑛𝑛
] = [
(𝛼𝛽)𝑥11 0
0 (𝛼𝛽)𝑥22
… 0
… 0
⋮ ⋮
0 0 ⋮ 0
… (𝛼𝛽)𝑥𝑛𝑛
]
[
(𝛼𝛽)𝑥11 00 (𝛼𝛽)𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… (𝛼𝛽)𝑥𝑛𝑛
] = [
(𝛼𝛽)𝑥11 00 (𝛼𝛽)𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… (𝛼𝛽)𝑥𝑛𝑛
]
Como se puede observar, se cumple el axioma 9. Axioma 10. 𝑆𝑒𝑎 𝑋 ∈ 𝑉 ⇒ 1 ∗ 𝑋 = 𝑋 ; 1 𝑒𝑠𝑐𝑎𝑙𝑎𝑟.
𝑋 = [
𝑥11 00 𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… 𝑥𝑛𝑛
]
1 ∗ 𝑋 = [
1𝑥11 00 1𝑥22
… 0… 0
⋮ ⋮0 0
⋮ 0… 1𝑥𝑛𝑛
]
Debido a que las operaciones que ocurren en cada posición de la matriz obedecen a las propiedades de los ℝ, entonces podemos decir que 1𝑥𝑖𝑖 = 𝑥𝑖𝑖 y por ende se cumple el axioma 10. Conclusión: Dado que todos los 10 axiomas se cumplen, es posible afirmar que V es un espacio Vectorial.

24). Demuestre que el conjunto de números reales positivos forma un espacio vectorial bajo las operaciones: 𝑽 = {ℝ+} 𝑥 + 𝑦 = 𝑥𝑦 𝛼𝑥 = 𝑥𝛼 Sol. Axioma 1. Sean 𝑋, 𝑌 ∈ 𝑉, Entonces 𝐴 + 𝐵 ∈ 𝑉.
𝑥 + 𝑦 = 𝑥𝑦. Dado que para los ℝ se cumple que al multiplicar dos números positivos obtendremos un número positivo, es correcto afirmar que se cumple el axioma 1. Axioma 2. Sean 𝑋, 𝑌, 𝑍 ∈ 𝑉, Entonces (𝑋 + 𝑌) + 𝑍 = 𝑋 + (𝑌 + 𝑍).
(𝒙 + 𝒚) + 𝒛 = 𝒙 + (𝒚 + 𝒛) ¿?
(𝑥𝑦) + 𝑧 = 𝑥 + (𝑦𝑧) 𝑥𝑦𝑧 = 𝑥𝑦𝑧
Se cumple el axioma 2. Axioma 3. ∀ 𝑋 ∈ 𝑉 ∃ 𝑀 ∈ 𝑉 ∶ 𝑋 + 𝑀 = 𝑋.
𝑥 + 𝑀 = 𝑥𝑀 = 𝑥
𝑀 =𝑥
𝑥
𝑀 = 1 Como si existe el modulo, se cumple el axioma 3. Axioma 4. ∀ 𝑋 ∈ 𝑉 ∃ 𝐼 ∈ 𝑉 ∶ 𝑋 + 𝐼 = 𝑀.
𝑥 + 𝐼 = 1
𝐼 =1
𝑥
Como existe el inverso aditivo, se cumple el axioma 4. Axioma 5. ∀ 𝑋, 𝑌 ∈ 𝑉 ⇒ 𝑋 + 𝑌 = 𝑌 + 𝑋 .
𝒙 + 𝒚 = 𝒚 + 𝒙 ¿?
𝑥𝑦 = 𝑦𝑥
Por la propiedad conmutativa de la multiplicación en ℝ 𝑥𝑦 = 𝑦𝑥 y se cumple el axioma 5.

Axioma 6. ∀ 𝑋 ∈ 𝑉 𝑦 𝛼 𝑒𝑠𝑐𝑎𝑙𝑎𝑟 ⇒ 𝛼𝑋 ∈ 𝑉.
𝛼𝑥 = 𝑥𝛼 Considerando las propiedades de las potencias para un 𝑥 ≥ 0 ⇒ 𝑥𝛼 ≥ 0, para 𝑎 ∈ ℝ, así se puede afirmar que 𝛼𝑋 ∈ 𝑉 y se cumple el axioma 6. Axioma 7. 𝑠𝑒𝑎 𝑋, 𝑌 ∈ 𝑉 𝑦 𝛼 𝑒𝑠𝑐𝑎𝑙𝑎𝑟 ⇒ 𝛼(𝑋 + 𝑌) = 𝛼𝑋 + 𝛼𝑌.
𝛂(𝐗 + 𝐘) = 𝛂𝐗 + 𝛂𝐘 ¿?
𝛼(𝑥𝑦) = 𝑥𝛼 + 𝑦𝛼 (𝑥𝑦)𝛼 = 𝑥𝛼𝑦𝛼 𝑥𝛼𝑦𝛼 = 𝑥𝛼𝑦𝛼
Se cumple el axioma 7. Axioma 8. 𝑆𝑒𝑎 𝑋 ∈ 𝑉 𝑦 𝛼, 𝛽 𝑒𝑠𝑐𝑎𝑙𝑎𝑟𝑒𝑠 ⇒ (𝛼 + 𝛽)𝑋 = 𝛼𝑋 + 𝛽𝑋.
(𝛼 + 𝑏)𝑥 = 𝛼𝑥 + 𝛽𝑥 𝑥𝛼+𝛽 = 𝑥𝛼 + 𝑥𝛽
𝑥𝛼𝑥𝛽 = 𝑥𝛼𝑥𝛽 Se cumple el axioma 8. Axioma 9. 𝑆𝑒𝑎 𝑋 ∈ 𝑉 𝑦 𝛼, 𝛽 𝑒𝑠𝑐𝑎𝑙𝑎𝑟𝑒𝑠 ⇒ 𝛼(𝛽𝑋) = (𝛼𝛽)𝑋.
𝛼(𝛽𝑥) = (𝛼𝛽)𝑥 𝛼(𝑥𝛽) = 𝑥𝛼𝛽
𝑥𝛽𝛼= 𝑥𝛼𝛽
𝑥𝛼𝛽 = 𝑥𝛼𝛽 Se cumple el axioma 9. Axioma 10. 𝑆𝑒𝑎 𝑋 ∈ 𝑉 ⇒ 1 ∗ 𝑋 = 𝑋 ; 1 𝑒𝑠𝑐𝑎𝑙𝑎𝑟.
1𝑥 = 𝑥1 𝑥1 = 𝑥
Se cumple el axioma 10. Conclusión: Dado que para el conjunto V todos los axiomas se cumplen, se puede considerar V como un espacio vectorial.

GREENBERG, Michael D. Advanced Engineering Mathematics. 𝟐𝒏𝒅 𝑬𝒅𝒊𝒕𝒊𝒐𝒏.
Pág. 438
3). Prove that(−1)𝑢 = −𝑢.
Sol.
0𝑢 − 𝑢 = 0𝑢 + (−1)𝑢 Por el axioma 8
0𝑢 − 𝑢 = (0 − 1)𝑢 Por el axioma 6 0𝑢 = 0 ; 𝑝𝑜𝑟 𝑡𝑒𝑜𝑟𝑒𝑚𝑎
−𝑢 = (−1)𝑢 Por el axioma 3
14). Show that the solutions of a linear homogenous differential equation, constitute a vector space, the so-called Solution space of that differential equation.
Sol.
Sea la EDH
𝑎1(𝑥)𝑑𝑦
𝑑𝑥+ 𝑎0(𝑥)𝑦 = 0
Y la solución a la EDH
𝑦 = 𝑓(𝑥) = 𝑐𝑖 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥 ; 𝑝(𝑥) =𝑎1(𝑥)
𝑎0(𝑥)
Hagamos V El espacio de todas las soluciones a la EDH.
Axioma 1. Sean 𝐹1(𝑥), 𝐹2(𝑥) ∈ 𝑉, Entonces 𝐹1(𝑥) + 𝐹2(𝑥) ∈ 𝑉.
𝐹1(𝑥) = 𝑐1 ∗ 𝑒−∫ 𝑝(𝑥)𝑑𝑥
𝐹2(𝑥) = 𝑐2 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
𝐹1(𝑥) + 𝐹2(𝑋) = (𝑐1 + 𝑐2) ∗ 𝑒−∫ 𝑝(𝑥)𝑑𝑥
Hagamos 𝐶 = 𝑐1 + 𝑐2
𝐹1(𝑥) + 𝐹2(𝑋) = 𝐶 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
Es claro de este modo que 𝐹1(𝑥) + 𝐹2(𝑋) también será solución a la EDH y por ende se cumple el axioma 1.

Axioma 2. Sean 𝐹1(𝑥), 𝐹2(𝑥), 𝐹3(𝑥) ∈ 𝑉, Entonces (𝐹1(𝑥) + 𝐹2(𝑥)) + 𝐹3(𝑥) = 𝐹1(𝑥) + (𝐹2(𝑥) +
𝐹3(𝑥)).
𝐹1(𝑥) = 𝑐1 ∗ 𝑒−∫ 𝑝(𝑥)𝑑𝑥
𝐹2(𝑥) = 𝑐2 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
𝐹3(𝑥) = 𝑐3 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
(𝑭𝟏(𝒙) + 𝑭𝟐(𝒙)) + 𝑭𝟑(𝒙) = 𝑭𝟏(𝒙) + (𝑭𝟐(𝒙) + 𝑭𝟑(𝒙)) ¿?
(𝑐1 + 𝑐2) ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥 + 𝑐3 ∗ 𝑒−∫ 𝑝(𝑥)𝑑𝑥 = 𝑐1 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥 + (𝑐2 + 𝑐3) ∗ 𝑒−∫ 𝑝(𝑥)𝑑𝑥
(𝑐1 + 𝑐2 + 𝑐3) ∗ 𝑒−∫ 𝑝(𝑥)𝑑𝑥 = (𝑐1 + 𝑐2 + 𝑐3) ∗ 𝑒−∫ 𝑝(𝑥)𝑑𝑥
Por tanto se cumple el axioma 2.
Axioma 3. ∀ 𝐹(𝑥) ∈ 𝑉 ∃ 𝑀(𝑥) ∈ 𝑉 ∶ 𝐹(𝑥) + 𝑀(𝑥) = 𝐹(𝑥).
𝐹(𝑥) = 𝑐 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
𝑀(𝑥) = 𝑐𝑚 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
𝐹(𝑥) + 𝑀(𝑥) = (𝑐 + 𝑐𝑚 ) ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥 = 𝑐 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
𝑐 + 𝑐𝑚 = 𝑐
𝑐𝑚 = 𝑐 − 𝑐
𝑐𝑚 = 0
Entonces:
𝑀(𝑥) = 0 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥 = 0
Se cumple el axioma 3.
Axioma 4. ∀ 𝐹(𝑥) ∈ 𝑉 ∃ 𝐼(𝑥) ∈ 𝑉 ∶ 𝐹(𝑥) + 𝐼(𝑥) = 𝑀(𝑥).
𝐹(𝑥) = 𝑐 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
𝐼(𝑥) = 𝑐 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
𝐹(𝑥) + 𝑀(𝑥) = (𝑐 + 𝑐𝑖 ) ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥 = 0 ∗ 𝑒−∫ 𝑝(𝑥)𝑑𝑥

𝑐 + 𝑐𝑖 = 0
𝑐𝑖 = −𝑐
Entonces:
𝐼(𝑥) = −𝑐 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
Se cumple el axioma 4.
Axioma 5. ∀ 𝐹1(𝑥), 𝐹2(𝑥) ∈ 𝑉 ⇒ 𝐹1(𝑥) + 𝐹2(𝑥) = 𝐹2(𝑥) + 𝐹1(𝑥) .
𝐹1(𝑥) = 𝑐1 ∗ 𝑒−∫ 𝑝(𝑥)𝑑𝑥
𝐹2(𝑥) = 𝑐2 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
𝐹1(𝑥) + 𝐹2(𝑥) = (𝑐1 + 𝑐2) ∗ 𝑒−∫ 𝑝(𝑥)𝑑𝑥
𝐹2(𝑥) + 𝐹1(𝑥) = (𝑐2 + 𝑐1) ∗ 𝑒−∫ 𝑝(𝑥)𝑑𝑥
Como para los ℝ se cumple que 𝑐1 + 𝑐2 = 𝑐2 + 𝑐1, entonces se cumple el axioma 5.
Axioma 6. ∀ 𝐹(𝑥) ∈ 𝑉 𝑦 𝛼 𝑒𝑠𝑐𝑎𝑙𝑎𝑟 ⇒ 𝛼𝐹(𝑥) ∈ 𝑉.
𝐹(𝑥) = 𝑐 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
𝛼𝐹(𝑥) = 𝛼𝑐 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
𝛼𝐹(𝑥) = 𝑐1 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
Se cumple el axioma 6.

Axioma 7. 𝑠𝑒𝑎 𝐹1(𝑥), 𝐹2(𝑥) ∈ 𝑉 𝑦 𝛼 𝑒𝑠𝑐𝑎𝑙𝑎𝑟 ⇒ 𝛼(𝐹1(𝑥) + 𝐹2(𝑥)) = 𝛼𝐹1(𝑥) + 𝛼𝐹2(𝑥).
𝐹1(𝑥) = 𝑐1 ∗ 𝑒−∫ 𝑝(𝑥)𝑑𝑥
𝐹2(𝑥) = 𝑐2 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
𝛼(𝐹1(𝑥) + 𝐹2(𝑥)) = 𝛼𝐹1(𝑥) + 𝛼𝐹2(𝑥)
𝛼 ∗ ((𝑐1 + 𝑐2) ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥) = 𝛼𝑐1 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥 + 𝛼𝑐2 ∗ 𝑒−∫ 𝑝(𝑥)𝑑𝑥
𝛼(𝑐1 + 𝑐2) ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥 = (𝛼𝑐1 + 𝛼𝑐2) ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
Como en ℝ 𝛼(𝑐1 + 𝑐2) = 𝛼𝑐1 + 𝛼𝑐2 entonces se cumple el axioma 7.
Axioma 8. 𝑆𝑒𝑎 𝐹(𝑥) ∈ 𝑉 𝑦 𝛼, 𝛽 𝑒𝑠𝑐𝑎𝑙𝑎𝑟𝑒𝑠 ⇒ (𝛼 + 𝛽)𝐹(𝑥) = 𝛼𝐹(𝑥) + 𝛽𝐹(𝑥).
𝐹(𝑥) = 𝑐 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
(𝛼 + 𝛽)𝐹(𝑥) = 𝛼𝐹(𝑥) + 𝛽𝐹(𝑥).
((𝛼 + 𝛽)𝑐) ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥 = (𝛼𝑐 + 𝛽𝑐)𝑒−∫𝑝(𝑥)𝑑𝑥
Como en ℝ (𝛼 + 𝛽)𝑐 = 𝛼𝑐 + 𝛽𝑐 entonces se cumple el axioma 8.
Axioma 9. 𝑆𝑒𝑎 𝐹(𝑥) ∈ 𝑉 𝑦 𝛼, 𝛽 𝑒𝑠𝑐𝑎𝑙𝑎𝑟𝑒𝑠 ⇒ 𝛼(𝛽𝐹(𝑥)) = (𝛼𝛽)𝑓(𝑥).
𝐹(𝑥) = 𝑐 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
𝛼(𝛽𝐹(𝑥)) = (𝛼𝛽)𝑓(𝑥).
𝛼 ∗ (𝛽𝑐) ∗ 𝑒−∫ 𝑝(𝑥)𝑑𝑥 = 𝛼𝛽𝑐 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
𝛼𝛽𝑐 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥 = 𝛼𝛽𝑐 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
Se cumple el axioma 9.

Axioma 10. 𝑆𝑒𝑎 𝐹(𝑥) ∈ 𝑉 ⇒ 1 ∗ 𝐹(𝑥) = 𝐹(𝑥) ; 1 𝑒𝑠𝑐𝑎𝑙𝑎𝑟.
𝐹(𝑥) = 𝑐 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
1𝐹(𝑥) = 1 ∗ 𝑐 ∗ 𝑒−∫𝑝(𝑥)𝑑𝑥
1𝐹(𝑥) = 𝑐 ∗ 𝑒−∫ 𝑝(𝑥)𝑑𝑥
Se cumple el axioma 10.
Conclusión: Como se cumple todos los axiomas podemos decir que el conjunto solución de una EDH es un espacio vectorial.
Sub espacios Vectoriales, conjunto generador y espacio generado:
GROSSMAN, Stanley. Algebra Lineal. 𝟓𝒕𝒂 𝑬𝒅𝒊𝒄𝒊ó𝒏.
Pág. 304
16). Determinar si el subconjunto H del espacio vectorial V, es subespacio de V.
𝑉 = 𝐶[0,1]
𝐻 = {𝑓 𝜖 𝐶[0,1]: 𝑓(0) = 𝑓(1) = 0}
Sol.
Cerradura 1. Sea 𝑓1, 𝑓2 ∈ 𝐻 ⇒ 𝑓1 + 𝑓2 ∈ 𝐻.
𝑓1 (0) = 0 𝑓1(1) = 0
𝑓2 (0) = 0 𝑓2(1) = 0 𝑓1 (0) + 𝑓2(0) = 0 f1(1) + 𝑓2 (1) = 0 Sabiendo del cálculo que al sumar dos funciones continuas en un intervalo el resultado será también una función continua en este intervalo, se cumple la primera cerradura.

Cerradura 2. Sea 𝑓 ∈ 𝐻, 𝛼 𝑒𝑠𝑐𝑎𝑙𝑎𝑟 ⇒ 𝛼𝑓 ∈ 𝐻.
𝑓1 (0) = 0 𝑓1(1) = 0
𝛼𝑓1 (0) = 𝛼 ∗ 0 𝛼𝑓1(1) = 𝛼 ∗ 0
𝛼𝑓1 (0) = 0 𝛼𝑓1(1) = 0
Como en los ℝ 𝛼 ∗ 0 = 0, se cumple la segunda cerradura.
Conclusión: H es sub espacio vectorial de V.
19). Determinar si el subconjunto H del espacio vectorial V, es sub espacio de V.
𝑉 = 𝐶[𝑎, 𝑏 ] 𝑎 < 𝑏 ; 𝑎, 𝑏𝜖 ℝ
𝐻 = {𝑓 𝜖 𝐶[𝑎, 𝑏]:∫ 𝑓(𝑥)𝑑𝑥 = 0𝑏
𝑎
}
Sol.
Cerradura 1. Sea 𝑓1, 𝑓2 ∈ 𝐻 ⇒ 𝑓1 + 𝑓2 ∈ 𝐻.
𝑓1 ∶ ∫ 𝑓1 (𝑥)𝑑𝑥 = 0𝑏
𝑎
𝑓2 ∶ ∫ 𝑓2 (𝑥)𝑑𝑥 = 0𝑏
𝑎
𝑓1 + 𝑓2 ∶ ∫ 𝑓1 (𝑥) + 𝑓2(𝑥)𝑑𝑥 = 0𝑏
𝑎
∫ 𝑓1 (𝑥) + 𝑓2(𝑥)𝑑𝑥 =𝑏
𝑎 ∫ 𝑓1 (𝑥)𝑑𝑥
𝑏
𝑎+ ∫ 𝑓2 (𝑥)𝑑𝑥
𝑏
𝑎
∫ 𝑓1 (𝑥) + 𝑓2(𝑥)𝑑𝑥 =𝑏
𝑎
0 + 0 = 0
Por tanto se cumple la primera cerradura.

Cerradura 2. Sea 𝑓 ∈ 𝐻, 𝛼 𝑒𝑠𝑐𝑎𝑙𝑎𝑟 ⇒ 𝛼𝑓 ∈ 𝐻.
𝑓 ∶ ∫ 𝑓 (𝑥)𝑑𝑥 = 0𝑏
𝑎
𝛼𝑓 ∶ ∫ 𝛼𝑓 (𝑥)𝑑𝑥 = 0𝑏
𝑎
∫ 𝛼𝑓 (𝑥)𝑑𝑥𝑏
𝑎
= 𝛼 ∗ ∫ 𝛼𝑓 (𝑥)𝑑𝑥𝑏
𝑎
∫ 𝛼𝑓 (𝑥)𝑑𝑥𝑏
𝑎
= 𝛼 ∗ 0
∫ 𝛼𝑓 (𝑥)𝑑𝑥𝑏
𝑎
= 0
Por tanto se cumple la segunda cerradura.
Conclusión: Como se cumplen ambas cerraduras, es correcto afirmar que H es sub espacio de V.
27). Sean 𝐻1 𝑦 𝐻2 sub espacios de 𝑉 y 𝐻1 + 𝐻2 = {𝑣: 𝑣 = 𝑣1 + 𝑣2 𝑐𝑜𝑛 𝑣1 ∈ 𝐻1 𝑦 𝑣2 ∈ 𝐻2} demuestre que (𝐻1 + 𝐻2) es sub espacio de 𝑉.
Sol.
Cerradura 1. Sea 𝑣1, 𝑣2 ∈ 𝐻 ⇒ 𝑣1 + 𝑣2 ∈ 𝐻.
𝑣1 = 𝑥1 + 𝑦1 : 𝑥1 ∈ 𝐻1 𝑦 𝑦1 ∈ 𝐻2
𝑣2 = 𝑥2 + 𝑦2 : 𝑥2 ∈ 𝐻1 𝑦 𝑦2 ∈ 𝐻2
𝑣1 + 𝑣2 = (𝑥1 + 𝑥2) + (𝑦1 + 𝑦2)
Como 𝐻1 es sub espacio de 𝑉 se cumple la primera cerradura, por ende 𝑥1 + 𝑥2 ∈ 𝐻1
Como 𝐻2 es sub espacio de 𝑉 se cumple la primera cerradura, por ende 𝑦1 + 𝑦2 ∈ 𝐻2

Entonces, se cumple la primera cerradura.
Cerradura 2. Sea 𝑣 ∈ 𝐻, 𝛼 𝑒𝑠𝑐𝑎𝑙𝑎𝑟 ⇒ 𝛼𝑣 ∈ 𝐻.
𝑣1 = 𝑥1 + 𝑦1 : 𝑥1 ∈ 𝐻1 𝑦 𝑦1 ∈ 𝐻2
𝛼 𝑣1 = 𝛼𝑥1 + 𝛼𝑦1
Como por definición, 𝐻1 𝑦 𝐻2 son es sub espacios de 𝑉 se cumple la segunda cerradura, por ende 𝛼𝑥1 ∈ 𝐻1 𝑦 𝛼𝑦1 ∈ 𝐻2 . Y se cumple la segunda cerradura.
Conclusión. El conjunto 𝐻1 + 𝐻2 es sub espacio de 𝑉
Pág. 310
9). Determine si el conjunto dado de vectores genera el espacio vectorial dado:
En ℙ2 ; 𝐺 = {1 − 𝑥 ; 3 − 𝑥2}
Sol.
ℙ2 = 𝐴𝑥2 + 𝐵𝑥 + 𝐶
Por definición 𝐺 genera a ℙ2 si y solo si existen constantes 𝑐𝑖 tales que
𝐴𝑥2 + 𝐵𝑥 + 𝐶 = 𝑐1 ∗ (1 − 𝑥) + 𝑐2(3 − 𝑥2)
𝑐1(1 − 𝑥) + 𝑐2(3 − 𝑥2) = 𝐴𝑥2 + 𝐵𝑥 + 𝐶
𝑐1 − 𝑐1𝑥 + 3𝑐2 − 𝑐2𝑥2 = 𝐴𝑥2 + 𝐵𝑥 + 𝐶
−𝑐2𝑥2 − 𝑐1𝑥 + 3𝑐2 + 𝑐1
Se tiene entonces el sistema:
𝑐2 = −𝐴
𝑐1 = −𝐵
3𝑐3 + 𝑐1 = 𝐶
Al solucionar el sistema tenemos que

𝑐2 = −𝐴 Y 𝑐2 =𝐶+𝐵
3
Debido a que no podemos garantizar que −𝐴 =𝐶+𝐵
3 ; decimos que 𝐺 no genera a ℙ2.
14). Demuestre que 2 polinomios no pueden generar ℙ2
Sol.
Si 𝐺 = {𝑃1(𝑥) ; 𝑃2(𝑥)} Generan a ℙ2 entonces
𝑃1(𝑥) = 𝑎𝑛𝑥𝑛 + 𝑎𝑛−1𝑥𝑛−1 + ⋯+ 𝑎1𝑥 + 𝑎0
𝑃2(𝑥) = 𝑏𝑛𝑥𝑛 + 𝑏𝑛−1𝑥𝑛−1 + ⋯+ 𝑏1𝑥 + 𝑏0
𝐴𝑥2 + 𝐵𝑥 + 𝐶 = 𝑐1 ∗ 𝑃1 + 𝑐2 ∗ 𝑃2
𝑐1 ∗ (𝑎𝑛𝑥𝑛 + 𝑎𝑛−1𝑥𝑛−1 + ⋯+ 𝑎1𝑥 + 𝑎0) + 𝑐2 ∗ (𝑏𝑛𝑥𝑛 + 𝑏𝑛−1𝑥
𝑛−1 + ⋯+ 𝑏1𝑥 + 𝑏0) = 𝐴𝑥2 + 𝐵𝑥 + 𝐶
Tenemos el siguiente sistema:
𝑐1 ∗ (
𝑎2
𝑎1
𝑎0
) + 𝑐2 ∗ (
𝑏2
𝑏1
𝑏0
) = 𝐴𝐵𝐶
Dado que se tienen 3 ecuaciones con 2 incógnitas, y ninguna ecuación es combinación de otra el sistema no tiene solución, por tanto no existe tales 𝑐1 𝑦 𝑐2.
Conclusión: Dos polinomios no son suficientes para generar el espacio ℙ2.
19). Sean 𝑣1, 𝑣2 ∈ ℝ3 demuestre que si 𝑣2 = 𝑐𝑣1 entonces el generado es una línea recta.
Sol.
𝑣2 = 𝑐𝑣1
𝑔𝑒𝑛 {𝑣1, 𝑣2} = {𝑐1𝑣1 + 𝑐2𝑣2}
𝑔𝑒𝑛 {𝑣1, 𝑣2} = {𝑐1𝑣1 + 𝑐𝑣1}
𝑔𝑒𝑛 {𝑣1, 𝑣2} = {(𝑐1 + 𝑐)𝑣1}
Hagamos 𝑐1 + 𝑐 = 𝛼
𝑔𝑒𝑛 {𝑣1, 𝑣2} = {𝛼𝑣1}

𝛼𝑣1, responde a una línea recta en el espacio para este caso.
GREENBERG, Michael D. Advanced Engineering Mathematics. 𝟐𝒏𝒅 𝑬𝒅𝒊𝒕𝒊𝒐𝒏.
Pág. 443
1). Show whether the vectors
d. 𝒗𝟏 = 1,3,2,2 ; 𝑣2 = 5,7,1,0 ; 𝑣3 = −1,−2,−4,3 Span ℝ4
Sol.
Si 𝑣1, 𝑣2, 𝑣3 generan ℝ4
ℝ4 = 𝑐1𝑣1 + 𝑐2𝑣2 + 𝑐3𝑣3
Obtenemos el siguiente Sistema de incógnitas 𝑐1, 𝑐2 𝑦 𝑐3.
(
𝑥𝑦𝑧𝑡
) = 𝑐1 (
1322
) + 𝑐2 (
5710
) + 𝑐3 (
−1−2−43
)
Dado que el sistema tiene más ecuaciones que incógnitas, no existe ninguna combinación de 𝑐1, 𝑐2 𝑦 𝑐3 que generen a ℝ4, lo que es consecuente con el teorema que enuncia que para generar ℝ𝑛 se necesitan n vectores linealmente independientes.
Conclusión: 𝑣1, 𝑣2, 𝑣3 no generan ℝ4
m. 𝑣1 = −4,1,0 ; 𝑣2 = 2,2,2 ; 𝑣3 = 1,2,3 Span ℝ3
Sol.
Si 𝑣1, 𝑣2, 𝑣3 generan ℝ3
ℝ3 = 𝑐1𝑣1 + 𝑐2𝑣2 + 𝑐3𝑣3
Al desarrollar la combinación lineal obtenemos el siguiente sistema de incógnitas 𝑐1, 𝑐2 𝑦 𝑐3.
(𝑥𝑦𝑧) = 𝑐1 (
−410
) + 𝑐2 (222) + 𝑐3 (
123)
Solucionando el sistema obtenemos

𝑐1 = −𝑥
6+
𝑦
3−
𝑧
6
𝑐2 = 𝑥
4+ 𝑦 −
3𝑧
4
𝑐3 = −𝑥
6−
2𝑦
3+
5𝑧
6
Como existen las constantes 𝑐1, 𝑐2 𝑦 𝑐3, podemos decir que 𝑣1, 𝑣2, 𝑣3 generan ℝ3
Conclusion: 𝑣1, 𝑣2, 𝑣3 generan ℝ3
3). Are the following vector sets subspaces of ℝ2? (See accompanying figure.) Explain.
a. The straight line L that extends from the origin to infinity.
Sol.
Hagamos 𝐻 el conjunto de los puntos que pertencen a la linea recta mostrada en la figura, de este modo:
𝐻 = {𝑥𝑖, 𝑦𝑖 ∶ 𝑦𝑖 = 𝑚𝑥𝑖 ; 𝑥𝑖 > 0 ;𝑚 > 0}
Cerradura 1. Sea 𝑃1 , 𝑃2 ∈ 𝐻 ⇒ 𝑃1 + 𝑃2 ∈ 𝐻.
Sean 𝑃1 𝑦 𝑃2, puntos que pertenecen a la línea de la figura mostrada entonces:
𝑃1 = 𝑥1 , 𝑦1 ; 𝑦1 = 𝑚 ∗ 𝑥1
𝑃2 = 𝑥2 , 𝑦2 ; 𝑦2 = 𝑚 ∗ 𝑥2
𝑃1 + 𝑃2 = (𝑥1 + 𝑥2) , (𝑦1 + 𝑦2)
𝑃1 + 𝑃2 = (𝑥1 + 𝑥2) , (𝑚 ∗ (𝑥1 + 𝑥2))
Por tanto se cumple la primera cerradura.

Cerradura 2. Sea 𝑃1 ∈ 𝐻, 𝛼 𝑒𝑠𝑐𝑎𝑙𝑎𝑟 ⇒ 𝛼𝑃1 ∈ 𝐻.
𝑃1 = 𝑥1 , 𝑦1 ; 𝑦1 = 𝑚 ∗ 𝑥1
𝛼𝑃1 = 𝛼 ∗ (𝑥1, 𝑦𝑖)
Analicemos el caso de un 𝛼 < 0, por ejemplo 𝛼 = −1
𝛼𝑃1 = 𝛼 ∗ (𝑥1, 𝑦𝑖) = (−1) ∗ (𝑥1, 𝑦𝑖)
𝛼𝑃1 = −𝑥1, −𝑦𝑖
Como 𝐻 no permite valores negativos para 𝑥 𝑛𝑖 𝑦 entonces 𝛼𝑃1 ∉ 𝐻, así que no se cumple la segunda cerradura
Conclusión: 𝐻 no representa un sub espacio de ℝ2.
b. The wedge-shaped region including its boundary lines that extends to infinity in both directions.
Sol.
Hagamos 𝐻 el conjunto de los puntos que pertencen a la región demarcada entre las dos líneas rectas mostradas, de este modo:
𝐻 = {𝑥𝑖, 𝑦𝑖 ∶ 𝑚1𝑥𝑖 ≤ 𝑦𝑖 ≤ 𝑚2𝑥𝑖 ; 𝑚2 > 𝑚1 }
Cerradura 1. Sea 𝑃1 , 𝑃2 ∈ 𝐻 ⇒ 𝑃1 + 𝑃2 ∈ 𝐻.
𝑃1 = 𝑥1 , 𝑦1 ; 𝑚1𝑥1 ≤ 𝑦1 ≤ 𝑚2𝑥1
𝑃2 = 𝑥2 , 𝑦2 ; 𝑚1𝑥2 ≤ 𝑦2 ≤ 𝑚2𝑥2
𝑃1 + 𝑃2 = (𝑥1 + 𝑥2) , (𝑦1 + 𝑦2) ; 𝑚1𝑥1 ≤ 𝑦1 ≤ 𝑚2𝑥1 ; 𝑚1𝑥2 ≤ 𝑦2 ≤ 𝑚2𝑥2
𝑃1 + 𝑃2 = (𝑥1 + 𝑥2) , (𝑦1 + 𝑦2) ; 𝑚1(𝑥1 + 𝑥2 ≤ 𝑦1 + 𝑦2 ≤ 𝑚2(𝑥1 + 𝑥2)
Por tanto se cumple la primera cerradura.
Cerradura 2. Sea 𝑃1 ∈ 𝐻, 𝛼 𝑒𝑠𝑐𝑎𝑙𝑎𝑟 ⇒ 𝛼𝑃1 ∈ 𝐻.
𝑃1 = 𝑥1 , 𝑦1 ; 𝑚1𝑥1 ≤ 𝑦1 ≤ 𝑚2𝑥1
𝛼𝑃1 = 𝛼 ∗ (𝑥1, 𝑦𝑖) ; 𝑚1(𝛼𝑥1) ≤ 𝛼𝑦1 ≤ 𝑚2(𝛼𝑥1)
Por tanto se cumple la segunda cerradura.
Conclusión: 𝐻 representa un sub espacio vectorial de ℝ2.
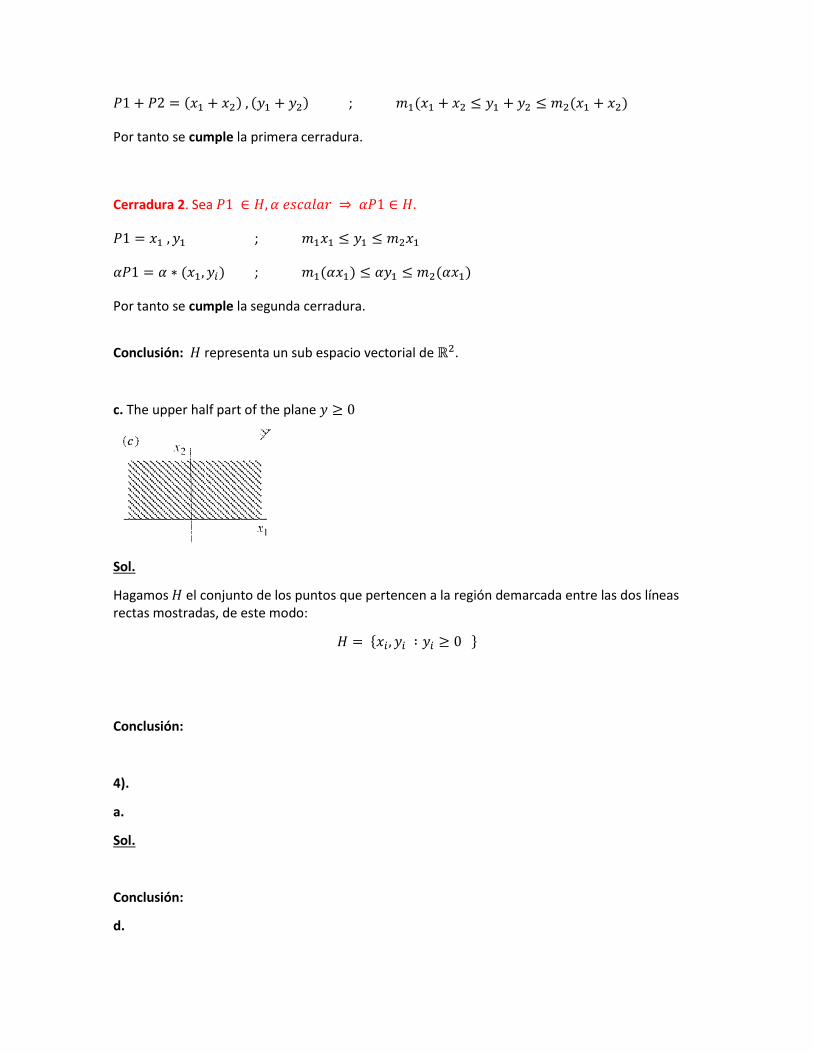
c. The upper half part of the plane 𝑦 ≥ 0
Sol.
Hagamos 𝐻 el conjunto de los puntos que pertencen a la región demarcada entre las dos líneas rectas mostradas, de este modo:
𝐻 = {𝑥𝑖, 𝑦𝑖 ∶ 𝑦𝑖 ≥ 0 }
Conclusión:
4).
a.
Sol.
Conclusión:
d.

Sol.
Conclusión:
5).
a.
Sol.
Conclusión:
b.
Sol.
Conclusión:
c.
Sol.
Conclusión:
d.
Sol.
Conclusión:
e.
Sol.
Conclusión:
f.
Sol.
Conclusión:
g.

Sol.
Conclusión:
h.
Sol.
Conclusión:
6).
a.
Sol.
Conclusión:
g.
Sol.
Conclusión:
7).
e.
Sol.
Conclusión:
