telemanipulators - fix tools
TRANSCRIPT

RH-TEL-2 Dimensions and technical information are subject to change without notice
telemanipulatorsRemote Handling | About DESTACO
Brazil
Spain
Netherlands
UK
France
India
Thailand
China
Mt. Juliet, TN USA
Auburn Hills, MI USA
Germany
Red Wing, MN USA
Wheeling, IL USA
THE BEST PRODUCTS. UNMATCHED SERVICE. WORLDWIDE.
With a support network spanning the globe, DESTACO offers consistent, comprehensive service to any
location in the world. Whether your operations are localized or span multiple continents, you will always
have access to the highest levels of customer service and technical support.
Since its founding in 1915, DESTACO has focused on outstanding customer service. The company grew
steadily over the next four decades and in 1958 started to expand internationally. In 1983, DESTACO
opened its irst overseas manufacturing facility in Thailand. With the acquisition of Robohand in 1996,
DESTACO started to get involved in automation and since then has expanded by acquiring and integrating
other well-known brands like Camco and Ferguson. In 2008, we strengthened our presence in life sciences
when Central Research Laboratories (CRL) joined team DESTACO.
Today DESTACO is a world leader in the innovation, design, manufacture and support of clamping,
gripping, transferring, indexing and robotic tooling solutions for workplace and automation needs.
Our growth is a direct result of our commitment to serve customers of all sizes on a local, one-to-one basis.
DESTACO provides productivity solutions to a diverse range of market segments
• Life sciences
• Bio containment
• Consumer products
• Food and packaging
• Automotive/transportation
• Aerospace
• Alternative energy
• Nuclear
• Defense
RH-TEL-3Dimensions and technical information are subject to change without notice
telemanipulatorsRemote Handling | Product Overview
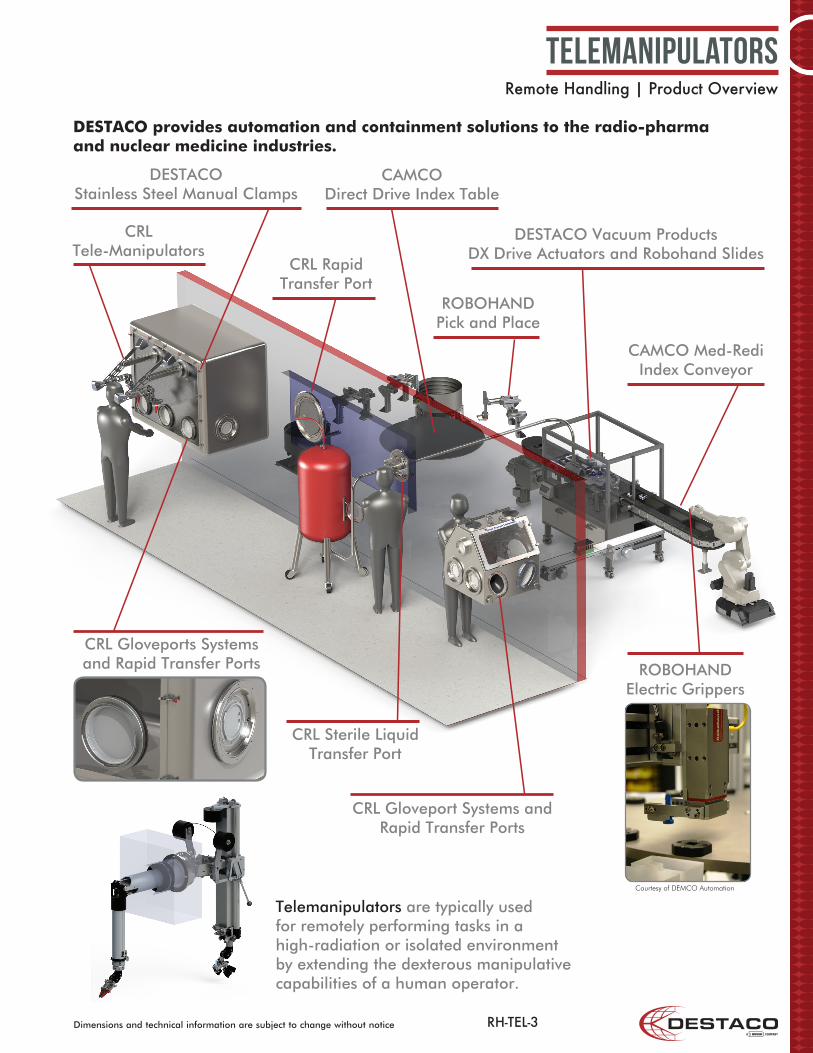
CRL Tele-Manipulators
DESTACO Stainless Steel Manual Clamps
CRL Gloveports Systemsand Rapid Transfer Ports
CRL Gloveport Systems and Rapid Transfer Ports
CRL Sterile Liquid Transfer Port
CRL Rapid Transfer Port
ROBOHANDPick and Place
DESTACO Vacuum Products DX Drive Actuators and Robohand Slides
CAMCO Direct Drive Index Table
CAMCO Med-Redi Index Conveyor
ROBOHAND Electric Grippers
Telemanipulators are typically used for remotely performing tasks in a high-radiation or isolated environment by extending the dexterous manipulative capabilities of a human operator.
Courtesy of DEMCO Automation
DESTACO provides automation and containment solutions to the radio-pharma and nuclear medicine industries.
RH-TEL-4 Dimensions and technical information are subject to change without notice
telemanipulatorsRemote Handling | Dimensions and Technical Speciications
Introduction ....................................................................................................... 5
One-Piece Telemanipulator ................................................................................. 8
Three-Piece Telemanipulator ................................................................................ 9
Telemanipulator Radiation Shielding ................................................................... 10
Telemanipulator Accessories ............................................................................. 11
RH-TEL-5Dimensions and technical information are subject to change without notice
telemanipulatorsRemote Handling | Introduction
Industry Pioneer
Central Research Laboratories (CRL) researches, designs and manufactures machines and systems which allow human operators to safely perform dexterous maneuvers in hazardous or sterile environments through remote operation. In 1945, at the dawn of the Atomic Age, three scientists at the Massachusetts Institute of Technology founded CRL and pioneered early development of safer methods for handling hazardous and toxic products produced by this industry.
Early mechanisms for handling materials in containment were awkward (usually overhead-mounted devices). Argonne National Laboratory commissioned CRL to develop a telemanipulator that could be mounted through the vertical face of the containment wall. Subsequent side wall development and customer requirements have led to 20 different models of telemanipulator with a wide range of capacities and conigurations. As a result of years of experience, CRL has also developed a full line of related manipulator tools and accessories described in this catalog.
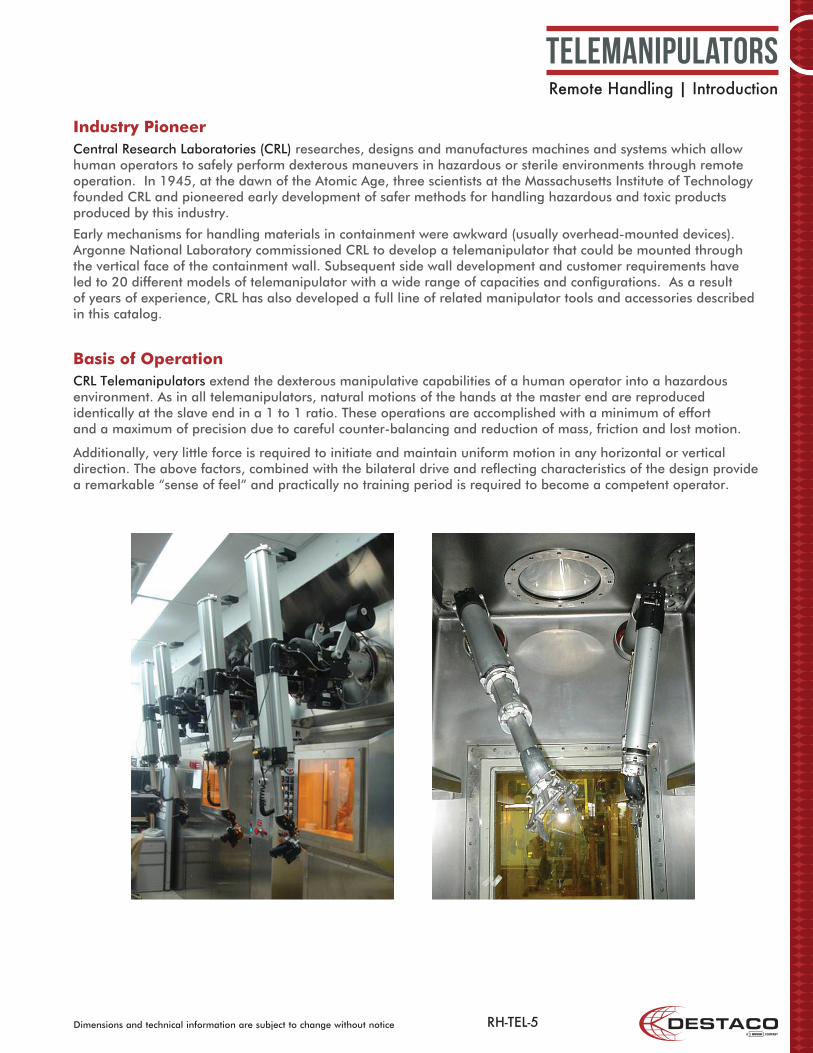
Basis of Operation
CRL Telemanipulators extend the dexterous manipulative capabilities of a human operator into a hazardous environment. As in all telemanipulators, natural motions of the hands at the master end are reproduced identically at the slave end in a 1 to 1 ratio. These operations are accomplished with a minimum of effort and a maximum of precision due to careful counter-balancing and reduction of mass, friction and lost motion.
Additionally, very little force is required to initiate and maintain uniform motion in any horizontal or vertical direction. The above factors, combined with the bilateral drive and relecting characteristics of the design provide a remarkable “sense of feel” and practically no training period is required to become a competent operator.
RH-TEL-6 Dimensions and technical information are subject to change without notice
telemanipulatorsRemote Handling | Telemanipulator Speciication Guidelines
Telemanipulators are used when the need to remotely perform tasks in a high radiation or hazardous environ-ment arises. Typical tasks range from operation laboratory instruments to the maintenance of large process equipment, all operations requiring dexterous manipulations. These tasks are unstructured and require real-time dexterous human intervention.
CRL specializes in customizing our current telemanipulator products and developing new products to meet your speciic needs. The speciication process includes the following steps with a typical installation view shown on the following page:
1) Select Manipulator Type: What kind of atmosphere in cell? For inert atmosphere and/or positive pressure applications a three-piece manipulator design is typically required. For air and/or negative pressure applications a one-piece manipulator design is used.
2) Handling Capacity: For laboratory-type applications, a light duty, highly responsive Telemanipulator is required. For process applications or maintenance of process equipment a standard or heavy duty-type Telemanipulator should be used. The handling capacities are listed in the tables on pages 7 and 9.
3) Manipulator Size: The cell dimensions will determine the typical mounting height and extended arm length required to reach objects in the desired working area. This determines the basic size, but arm lengths can be customized to meet speciic reach requirements.
4) Radiation Shielding: Shielding can be provided on all manipulators to minimize radiation exposure on the operator side of the cell. Through tube shielding designs are described on page 10.
5) Tong/Jaws: There are multiple options available for handling a variety of different types of loads. For heavy duty applications the SRL tong is available. For light duty applications the RCD tong is preferred. To move the heaviest loads a Load Hook can be utilized.
6) Handle Options: Three typical handle types are described on page 12. Handles are chosen based on a combination of operator preference and typical load capacity.
7) Indexing: Indexing is used to shift the tong/jaw position without moving the handle. Mechanical and electrical indexing methods are available and are described by model on pages 7 and 9.
8) Locks: Motion and tamper locks are available to lock the manipulator rigidly into any position. This facilitates installation/removal and allows the manipulator to hold an object in space without requiring an operator. Locks are described on page 13.
9) Booting: Booting is used to restrict air low into a hot cell and also to protect the slave arm from contamination. Typical booting options are described on page 14.
10) Installation/Removal Carts: CRL builds carts to facilitate the installation and removal of telemanipulators. The system facilitates vertical and horizontal movement for proper alignment. Typical carts are shown on page 15.
RH-TEL-7Dimensions and technical information are subject to change without notice
telemanipulatorsRemote Handling | Telemanipulator Speciication Guide
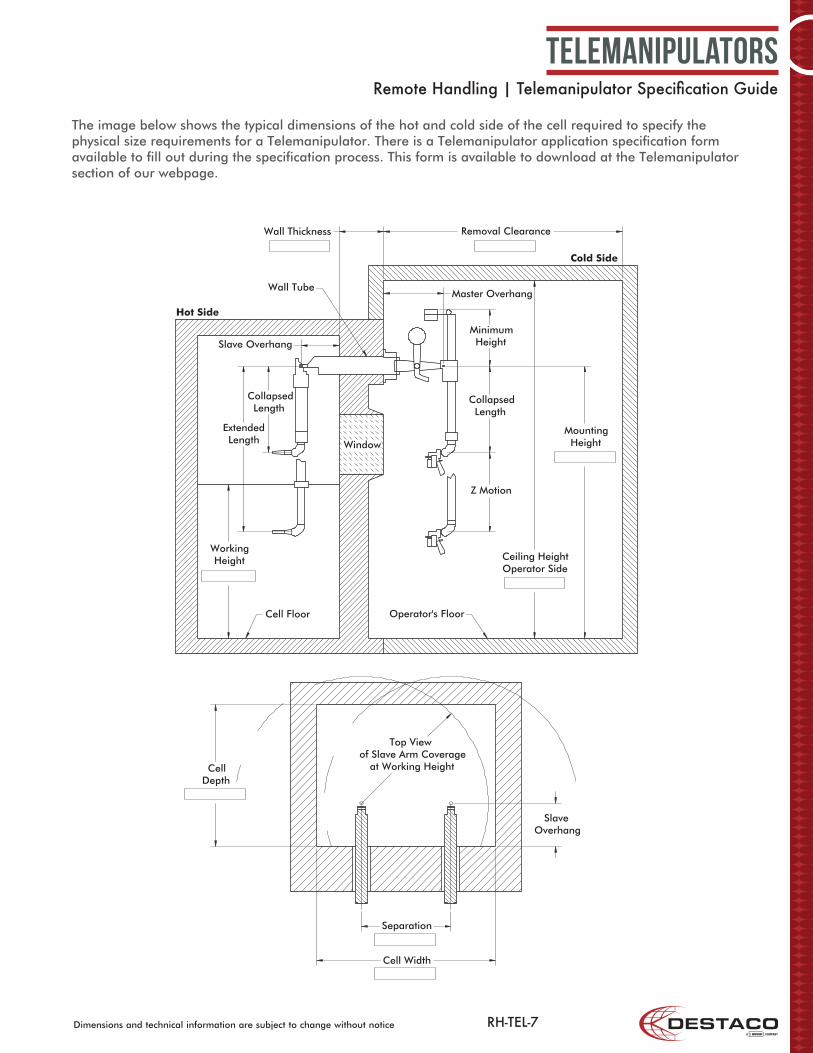
Removal Clearance
Ceiling HeightOperator Side
MinimumHeight
Master Overhang
MountingHeight
CollapsedLength
Z Motion
WorkingHeight
CollapsedLength
ExtendedLength
Slave Overhang
Wall Tube
Wall Thickness
Window
Cell Floor Operator's Floor
Cell Width
CellDepth
Separation
SlaveOverhang
Top Viewof Slave Arm Coverage
at Working Height
Hot Side
Cold Side
The image below shows the typical dimensions of the hot and cold side of the cell required to specify the physical size requirements for a Telemanipulator. There is a Telemanipulator application speciication form available to ill out during the speciication process. This form is available to download at the Telemanipulator section of our webpage.
RH-TEL-8 Dimensions and technical information are subject to change without notice
telemanipulatorsRemote Handling | Dimensions and Technical Speciications
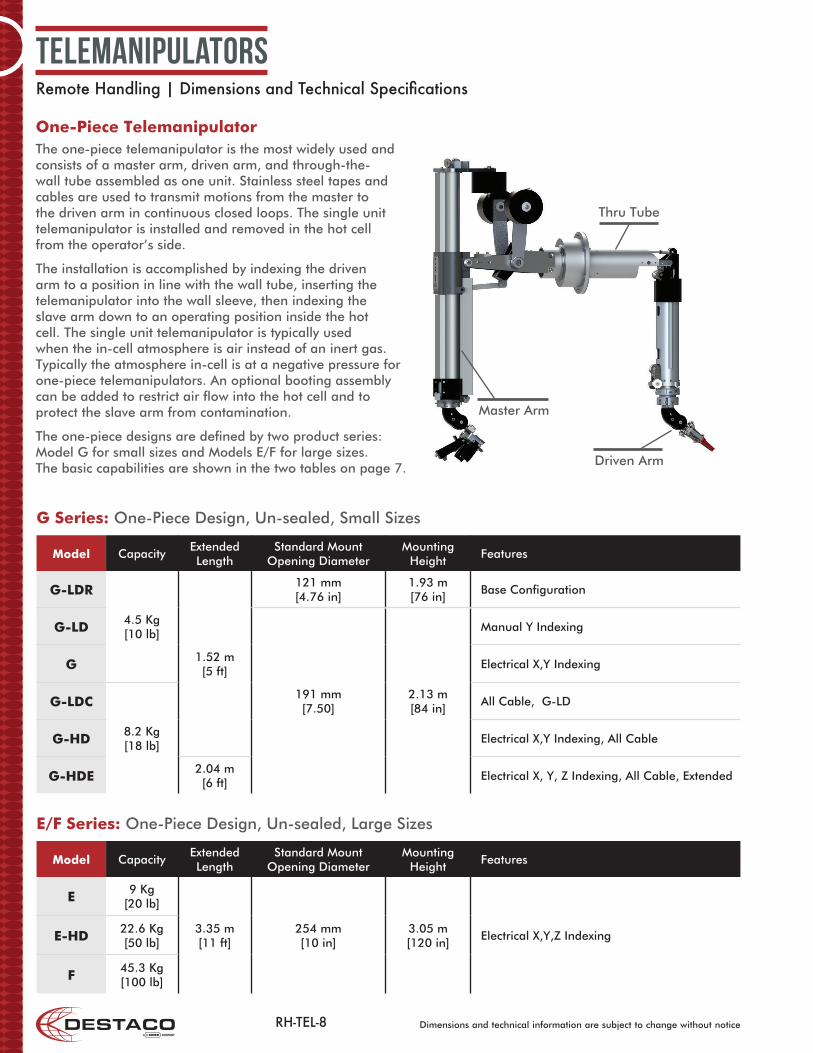
One-Piece Telemanipulator
The one-piece telemanipulator is the most widely used and consists of a master arm, driven arm, and through-the-wall tube assembled as one unit. Stainless steel tapes and cables are used to transmit motions from the master to the driven arm in continuous closed loops. The single unit telemanipulator is installed and removed in the hot cell from the operator’s side.
The installation is accomplished by indexing the driven arm to a position in line with the wall tube, inserting the telemanipulator into the wall sleeve, then indexing the slave arm down to an operating position inside the hot cell. The single unit telemanipulator is typically used when the in-cell atmosphere is air instead of an inert gas. Typically the atmosphere in-cell is at a negative pressure for one-piece telemanipulators. An optional booting assembly can be added to restrict air low into the hot cell and to protect the slave arm from contamination.
The one-piece designs are deined by two product series: Model G for small sizes and Models E/F for large sizes. The basic capabilities are shown in the two tables on page 7.
Driven Arm
Thru Tube
Master Arm
G Series: One-Piece Design, Un-sealed, Small Sizes
Model CapacityExtended Length
Standard Mount Opening Diameter
Mounting Height
Features
G-LDR
4.5 Kg [10 lb]
1.52 m [5 ft]
121 mm [4.76 in]
1.93 m[76 in]
Base Coniguration
G-LD
191 mm[7.50]
2.13 m[84 in]
Manual Y Indexing
G Electrical X,Y Indexing
G-LDC
8.2 Kg[18 lb]
All Cable, G-LD
G-HD Electrical X,Y Indexing, All Cable
G-HDE2.04 m[6 ft]
Electrical X, Y, Z Indexing, All Cable, Extended
E/F Series: One-Piece Design, Un-sealed, Large Sizes
Model CapacityExtended Length
Standard Mount Opening Diameter
Mounting Height
Features
E9 Kg
[20 lb]
3.35 m [11 ft]
254 mm [10 in]
3.05 m[120 in]
Electrical X,Y,Z IndexingE-HD22.6 Kg [50 lb]
F45.3 Kg [100 lb]
RH-TEL-9Dimensions and technical information are subject to change without notice
telemanipulatorsRemote Handling | Dimensions and Technical Speciications
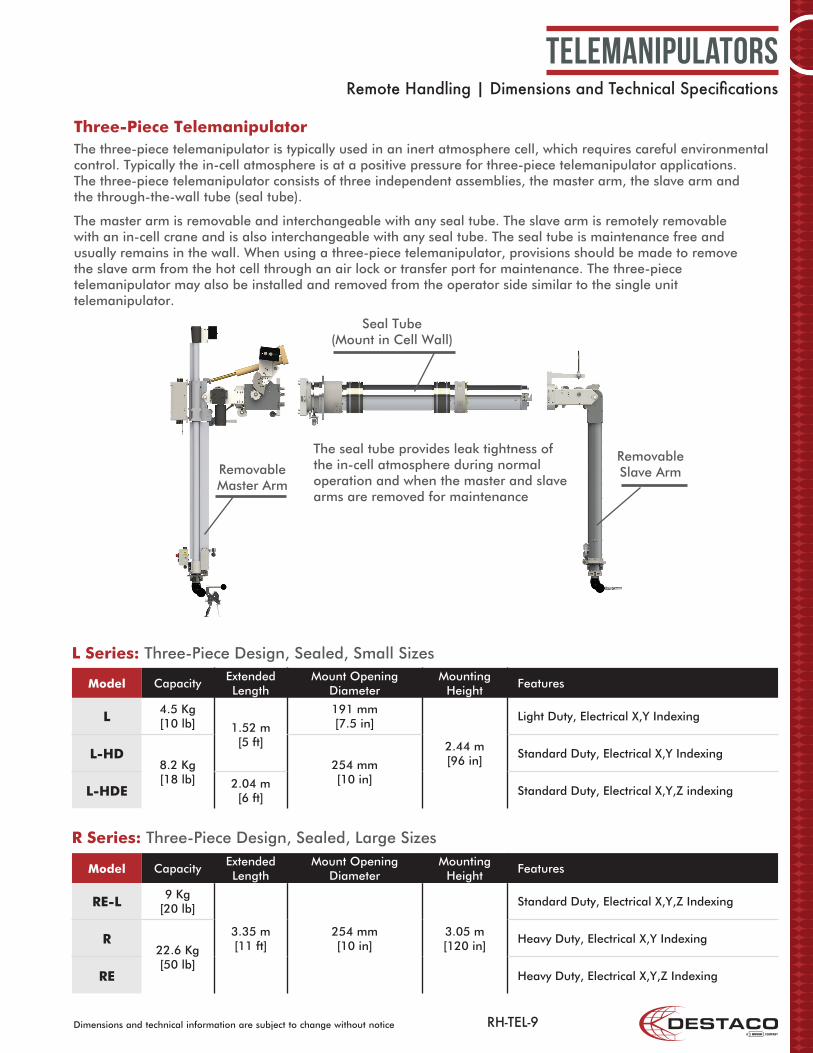
Three-Piece Telemanipulator
The three-piece telemanipulator is typically used in an inert atmosphere cell, which requires careful environmental control. Typically the in-cell atmosphere is at a positive pressure for three-piece telemanipulator applications. The three-piece telemanipulator consists of three independent assemblies, the master arm, the slave arm and the through-the-wall tube (seal tube).
The master arm is removable and interchangeable with any seal tube. The slave arm is remotely removable with an in-cell crane and is also interchangeable with any seal tube. The seal tube is maintenance free and usually remains in the wall. When using a three-piece telemanipulator, provisions should be made to remove the slave arm from the hot cell through an air lock or transfer port for maintenance. The three-piece telemanipulator may also be installed and removed from the operator side similar to the single unit telemanipulator.
R Series: Three-Piece Design, Sealed, Large Sizes
Model CapacityExtended Length
Mount Opening Diameter
Mounting Height
Features
RE-L9 Kg
[20 lb]
3.35 m [11 ft]
254 mm [10 in]
3.05 m[120 in]
Standard Duty, Electrical X,Y,Z Indexing
R22.6 Kg [50 lb]
Heavy Duty, Electrical X,Y Indexing
RE Heavy Duty, Electrical X,Y,Z Indexing
Model CapacityExtended Length
Mount Opening Diameter
Mounting Height
Features
L4.5 Kg [10 lb] 1.52 m
[5 ft]
191 mm [7.5 in]
2.44 m[96 in]
Light Duty, Electrical X,Y Indexing
L-HD8.2 Kg [18 lb]
254 mm [10 in]
Standard Duty, Electrical X,Y Indexing
L-HDE2.04 m [6 ft]
Standard Duty, Electrical X,Y,Z indexing
Removable Slave Arm
Seal Tube (Mount in Cell Wall)
Removable Master Arm
The seal tube provides leak tightness of the in-cell atmosphere during normal operation and when the master and slave arms are removed for maintenance
L Series: Three-Piece Design, Sealed, Small Sizes

RH-TEL-10 Dimensions and technical information are subject to change without notice
telemanipulatorsRemote Handling | Telemanipulator Radiation Shielding
Shielding can be provided for all CRL manipulators to prevent large amounts of radiation from penetrating to the operator side of the cell. The shielding is mounted in and/or around the telemanipulator thru tube and is normally located so it is centered in the cell wall. A variety of shielding materials are available with lead, poly and steel typically used. The internal thru-tube shielding and external thru-tube to wall tube shielding conigurations can be provided as shown below:
Thru-Tube Shielding Standard Design:
• Straight tie rods pass thru aligned slots in internal shielding pieces.
Thru-Tube Shielding Labyrinth Design:
• Staggered tie rods pass thru staggered slots in internal shielding, minimizing potential shine path.
Thru TubeRoller Trucks
Wall Tube
Thru-Tube to Wall Shield(Tight on thru-tube)
Labyrinth Laminated Thru-Tube Shield
Thru-Tube to Wall Shield(Expands out to wall tube)
Wall Tube
Thru Tube
External Shielding
Laminated Thru Tube Shielding
Roller Trucks
RH-TEL-11Dimensions and technical information are subject to change without notice
telemanipulatorsRemote Handling | Accessories
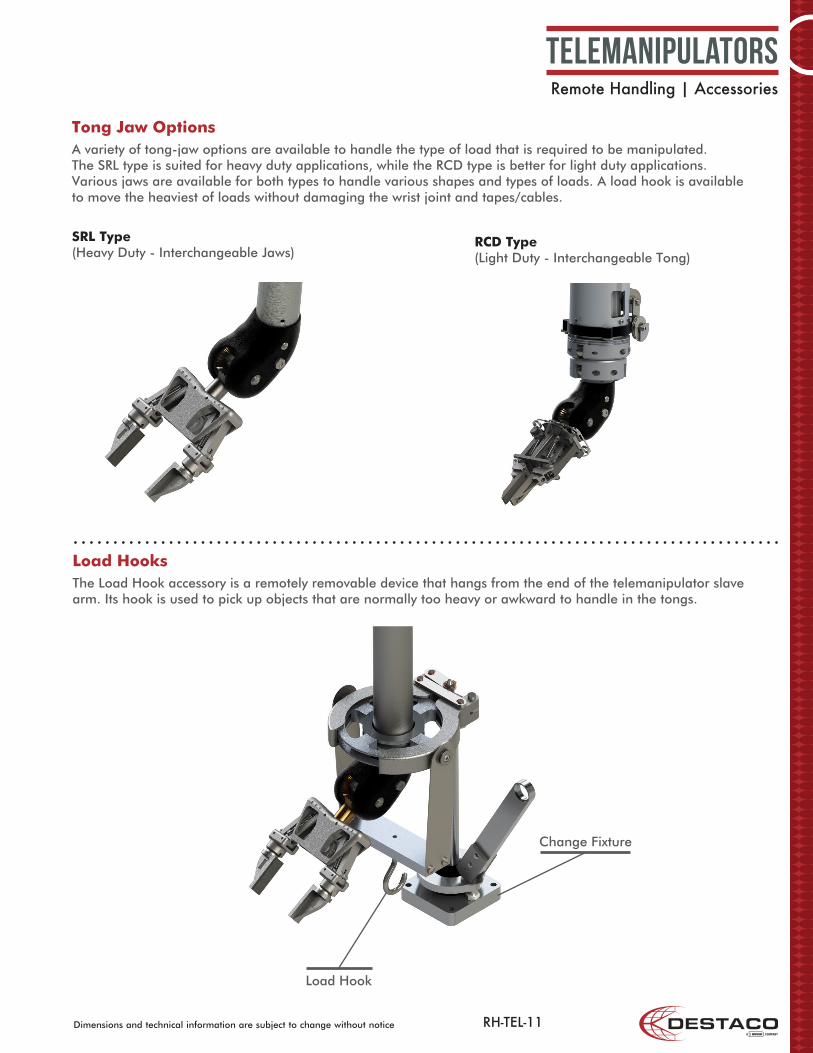
Tong Jaw Options
A variety of tong-jaw options are available to handle the type of load that is required to be manipulated. The SRL type is suited for heavy duty applications, while the RCD type is better for light duty applications. Various jaws are available for both types to handle various shapes and types of loads. A load hook is available to move the heaviest of loads without damaging the wrist joint and tapes/cables.
SRL Type(Heavy Duty - Interchangeable Jaws)
Load Hooks
The Load Hook accessory is a remotely removable device that hangs from the end of the telemanipulator slave arm. Its hook is used to pick up objects that are normally too heavy or awkward to handle in the tongs.
RCD Type(Light Duty - Interchangeable Tong)
Change Fixture
Load Hook

RH-TEL-12 Dimensions and technical information are subject to change without notice
telemanipulatorsRemote Handling | Accessories
Handle Options
CRL can provide a variety of handles chosen for operation comfort and eficiency. All handles shown can be operated with either hand and are not interchangeable on the telemanipulator without major disassembly.
Pistol Grip Handle(Typically Used for Heavy Handling)
Motion Grip Handle(Typically Used for Heavy Handling)
Ambidextrous Opposed-Grip Handle
(Typically Used for Light Handling)
Motion Locks
Motion locks for CRL telemanipulators are used to lock the telemanipulator rigidly in any position within the dimensional limits of the telemanipulator. This allows the telemanipulator to hold an object in space without requiring an operator, and facilitates the installation and removal of the telemanipulator.
In general, motion locks come in three distinct units:
• X Motion• Y Motion • Z Motion, Azimuth and Elevation/Twist Rotations
The three units can be operated independently, or together (manually or pneumatically actuated.)
The tong/grip lock is a part of all standard telemanipulator handle assemblies.
Tamper Lock
Tamper locks can be used to lock the telemanipulator handle to the cell wall and prevent damage to the telemanipulator or in-cell equipment by unauthorized operators.

RH-TEL-13Dimensions and technical information are subject to change without notice
telemanipulatorsRemote Handling | Accessories
Telemanipulator Booting
A booting assembly is typically used to restrict air low into the hot cell and to protect the slave arm from contamination. Booting can be provided as polyurethane, CSM coated polyurethane or PVC sleeve material.
• For one-piece models, the tong assembly or jaws can be disconnected and entire telemanipulator removed with booting still in place and no loss of containment.
• For three-piece models, the entire slave arm can be disconnected from seal tube with booting still in place.
Telemanipulator Carts
The CRL Installation/Removal Cart is a multipurpose system which can be used for the installation and removal of telemanipulators. The system consists of a trans-portation cart and a lift table, which allows the units to be moved horizontally and vertically for proper alignment during installation and removal process.
Large Size Cart
• Typically used for heavy-duty units with high mounting heights.
Small Size Cart
• Typically used for light duty units with low mounting heights.