tensor analysis - universität wien · tensor analysis author: harald höller ... the simple...
TRANSCRIPT
Tensor Analysis
Author: Harald Höller
last modified: 02.12.09
Licence: Creative Commons Lizenz by-nc-sa 3.0 at
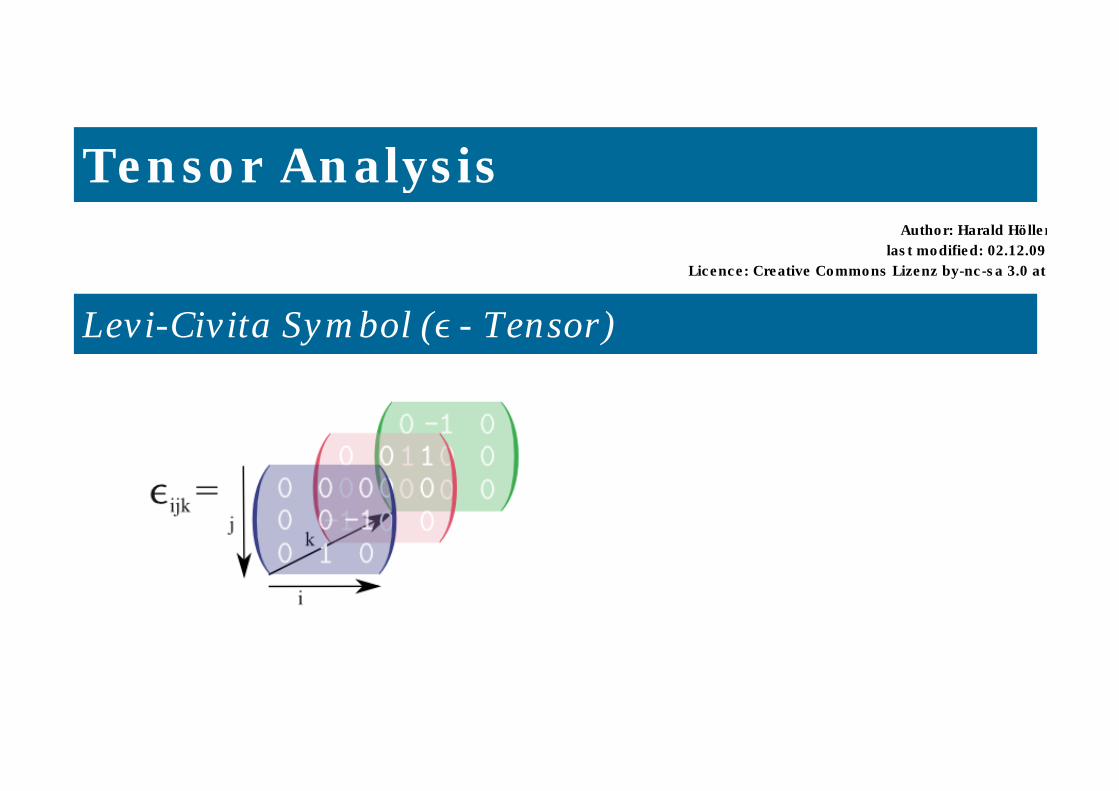
Levi-Civita Symbol (Ε - Tensor)

Ε = Ε = Ε = 1 123 231 312Ε = Ε = Ε = -1 132 213 321
Some useful relations between Ε -tensors and the Kronecker delta
Mathematica commands used in the following section
In[1]:= ? Sum
Sum@ f , 8i, imax<D evaluates the sum âi=1
imax
f.
Sum@ f , 8i, imin, imax<D starts with i = imin .
Sum@ f , 8i, imin, imax, di<D uses steps di.
Sum@expr, 8i, 8i1, i2, ¼<<D uses successive values i1, i2, ¼.
Sum@ f , 8i, imin, imax<, 8 j, jmin, jmax<, ¼D evaluates the multiple sum âi=imin
imax âj=jmin
jmax
¼ f.
In[2]:= ? Signature
Signature@listD gives the signature of the permutation needed to place the elements of list in canonical order.
In[3]:= ? KroneckerDelta
KroneckerDelta@n1, n2, ¼D gives the Kronecker delta ∆n1 n2 ¼, equal to 1 if all the ni are equal, and 0 otherwise.
2 Tensor_analysis_m6.nb
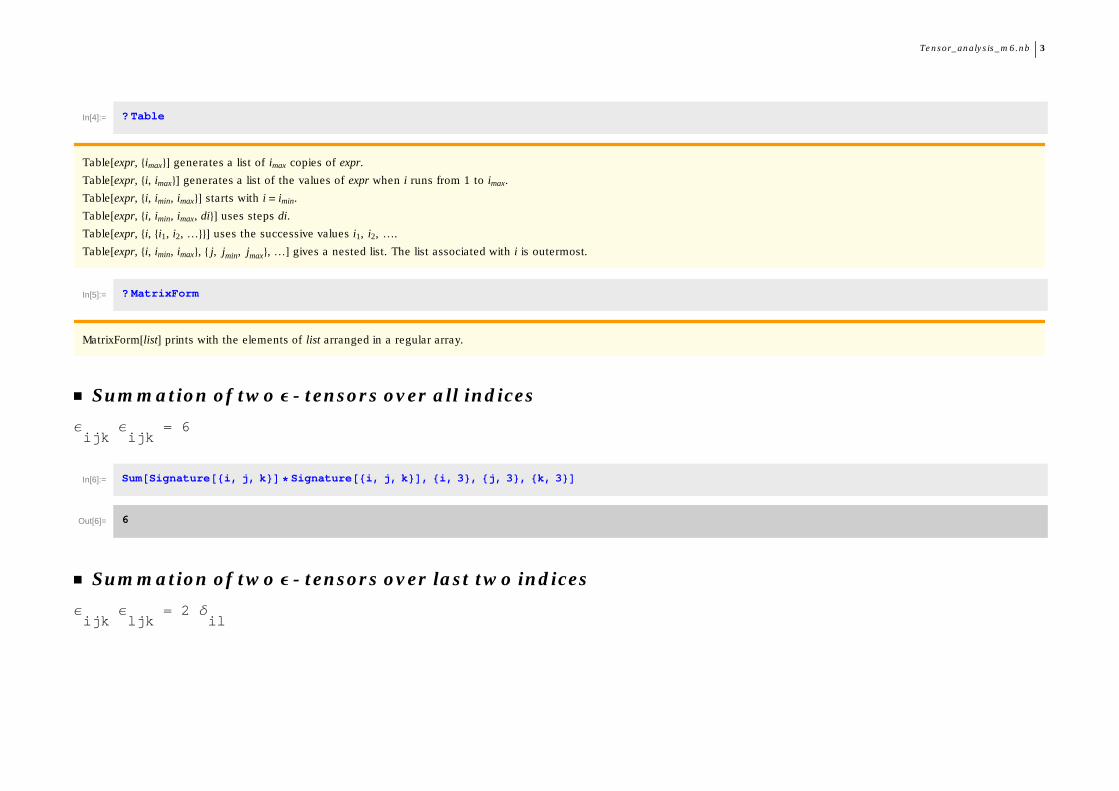
In[4]:= ? Table
Table@expr, 8imax<D generates a list of imax copies of expr.
Table@expr, 8i, imax<D generates a list of the values of expr when i runs from 1 to imax.
Table@expr, 8i, imin, imax<D starts with i = imin.
Table@expr, 8i, imin, imax, di<D uses steps di.
Table@expr, 8i, 8i1, i2, ¼<<D uses the successive values i1, i2, ¼.
Table@expr, 8i, imin, imax<, 8 j, jmin, jmax<, ¼D gives a nested list. The list associated with i is outermost.
In[5]:= ? MatrixForm
MatrixForm@listD prints with the elements of list arranged in a regular array.
� Summation of two Ε - tensors over all indices
Ε Ε = 6 ijk ijk
In[6]:= Sum@Signature@8i, j, k<D *Signature@8i, j, k<D, 8i, 3<, 8j, 3<, 8k, 3<D
Out[6]= 6
� Summation of two Ε - tensors over last two indices
Ε Ε = 2 ∆ ijk ljk il
Tensor_analysis_m6.nb 3
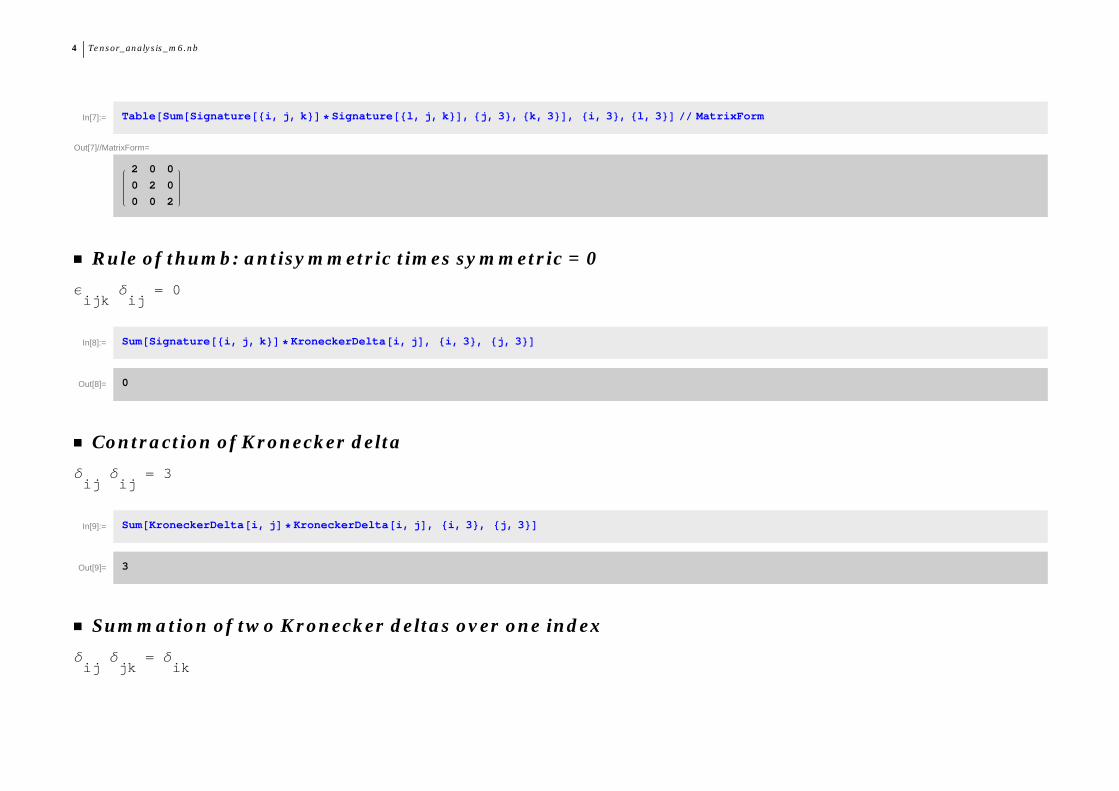
In[7]:= Table@Sum@Signature@8i, j, k<D *Signature@8l, j, k<D, 8j, 3<, 8k, 3<D, 8i, 3<, 8l, 3<D �� MatrixForm
Out[7]//MatrixForm=
2 0 0
0 2 0
0 0 2
� Rule of thumb: antisymmetric times symmetric = 0
Ε ∆ = 0 ijk ij
In[8]:= Sum@Signature@8i, j, k<D *KroneckerDelta@i, jD, 8i, 3<, 8j, 3<D
Out[8]= 0
� Contraction of Kronecker delta
∆ ∆ = 3 ij ij
In[9]:= Sum@KroneckerDelta@i, jD *KroneckerDelta@i, jD, 8i, 3<, 8j, 3<D
Out[9]= 3
� Summation of two Kronecker deltas over one index
∆ ∆ = ∆ ij jk ik
4 Tensor_analysis_m6.nb

In[10]:= Table@Sum@KroneckerDelta@i, jD *KroneckerDelta@j, kD, 8j, 3<D, 8i, 3<, 8k, 3<D �� MatrixForm
Out[10]//MatrixForm=
1 0 0
0 1 0
0 0 1
Differential Operators in General Coordinates
Physics is full of differential operators and in many cases, the simple Euclidean vector space won't provide the coordinates of choice. Thus, often we
will have to transform into problem-oriented coordinate systems. With the package "VectorAnalysis", Mathematica supports a list of useful
tensorial operations, like gradient, divergence, rotation. In the following section we want to work out some applications to special coordinates
and once more compare the Mathematica-way with the "classical" approach.
In[11]:= Needs@"VectorAnalysis`"D
Nabla-operator in Cartesian coordinates
� Classical approach
The nabla operator is defined as the sum of derivations with respect to the coordinates times the corresponding base vector.
In Cartesian coordinates Iex, ey, ezMIn[12]:= ex := 81, 0, 0<
ey := 80, 1, 0<ez := 80, 0, 1<
this yields
Tensor_analysis_m6.nb 5

this yields
In[15]:= Nabla @func_, x_, y_, z_D = D@func@x, y, zD, xD *ex + D@func@x, y, zD, yD *ey + D@func@x, y, zD, zD *ez
Out[15]= 9funcH1,0,0L@x, y, zD, funcH0,1,0L@x, y, zD, funcH0,0,1L@x, y, zD=
� Example: Scalar function R
We want to check the known relation
grad r =xÓ
r
and define as a scalar function the lenght of a vector x by r = x2
.
In[16]:= R@x_, y_, z_D := Sqrt@x^2 + y^2 + z^2D
In[17]:= Nabla@R, x, y, zD �� MatrixForm
Out[17]//MatrixForm=
x
x2+y2+z2
y
x2+y2+z2
z
x2+y2+z2
The gradient of a scalar is a tensor of rank 1 i.e. a vectorfield.
6 Tensor_analysis_m6.nb

� Mathematica command Grad
At first we need to define the coordinate system. We need the following commands
In[18]:= ? SetCoordinates
SetCoordinates@coordsysD sets the default coordinate system to be coordsys with default variables.
SetCoordinates@coordsys@c1, c2, c3DD sets the default coordinate system to be coordsys with variables c1, c2, and c3.
In[19]:= ? Cartesian
Cartesian represents the Cartesian coordinate system with default variables Xx, Yy and Zz.
Cartesian@x, y, zD represents the Cartesian coordinate system with variables x, y, and z.
In[20]:= SetCoordinates@Cartesian@x, y, zDD
Out[20]= Cartesian@x, y, zD
The Grad command simply confirms the upper result.
In[21]:= ? Grad
Grad@ f D gives the gradient, Ñ f , of the scalar function f in the default coordinate system.
Grad@ f , coordsysD gives the gradient of f in the coordinate system coordsys.
Tensor_analysis_m6.nb 7

In[22]:= Grad@Sqrt@x^2 + y^2 + z^2DD
Out[22]= :x
x2 + y2 + z2,
y
x2 + y2 + z2,
z
x2 + y2 + z2>
� Example: Vector field
In[23]:= P@x_, y_, z_D := :x
x2 + y2 + z2,
y
x2 + y2 + z2,
z
x2 + y2 + z2>
In[24]:= Nabla@P, x, y, zD �� FullSimplify
Out[24]= ::y2 + z2
Ix2 + y2 + z2M3�2, -
x y
Ix2 + y2 + z2M3�2, -
x z
Ix2 + y2 + z2M3�2>,
:-
x y
Ix2 + y2 + z2M3�2,
x2 + z2
Ix2 + y2 + z2M3�2, -
y z
Ix2 + y2 + z2M3�2>, :-
x z
Ix2 + y2 + z2M3�2, -
y z
Ix2 + y2 + z2M3�2,
x2 + y2
Ix2 + y2 + z2M3�2>>
The nabla operator applied on a tensor of rank 1 produces a tensor of rank 2. The divergence of our vector field P is given by the trace of the gradient
on P. The divergence is of course a scalar again.
In[25]:= ? Tr
Tr@listD finds the trace of the matrix or tensor list.
Tr@list, f D finds a generalized trace, combining terms with f instead of Plus.
Tr@list, f , nD goes down to level n in list.
8 Tensor_analysis_m6.nb

In[26]:= Tr@Nabla@P, x, y, zDD
Out[26]= -
x2
Ix2 + y2 + z2M3�2-
y2
Ix2 + y2 + z2M3�2-
z2
Ix2 + y2 + z2M3�2+
3
x2 + y2 + z2
In[27]:= FullSimplify@%D
Out[27]=2
x2 + y2 + z2
Again we confirm with the Mathematica command (Div).
In[28]:= ? Div
Div@ f D gives the divergence, Ñ × f , of the vector field f in the default coordinate system.
Div@ f , coordsysD gives the divergence of f in the coordinate system coordsys.
In[29]:= DivB:x
x2 + y2 + z2,
y
x2 + y2 + z2,
z
x2 + y2 + z2>F �� FullSimplify
Out[29]=2
x2 + y2 + z2
Tensor_analysis_m6.nb 9

Nabla Operator in spherical coordinates
� The Mathematica-way
In[30]:= Clear@"Global`*"D
In[31]:= ? Spherical
Spherical represents the spherical coordinate system with default variables Rr, Ttheta and Pphi.
Spherical@r, Θ, ΦD represents the spherical coordinate system with variables r, Θ and Φ.
In[32]:= SetCoordinates@Spherical@r, Θ, ΦDD
Out[32]= Spherical@r, Θ, ΦD
In[33]:= Grad@rD
Out[33]= 81, 0, 0<
In[34]:= Div@81, 0, 0<D
Out[34]=2
r
10 Tensor_analysis_m6.nb

� Alternatively
Define spherical coordinates by their transformation rules
In[35]:= x := r Sin@ΘD Cos@ΦDy := r Sin@ΘD Sin@ΦDz := r Cos@ΘD
and determine the Jacobian of the transformation
In[38]:= Tij = 88D@x, rD, D@x, ΘD, D@x, ΦD<, 8D@y, rD, D@y, ΘD, D@y, ΦD<, 8D@z, rD, D@z, ΘD, D@z, ΦD<<
Out[38]= 88Cos@ΦD Sin@ΘD, r Cos@ΘD Cos@ΦD, -r Sin@ΘD Sin@ΦD<, 8Sin@ΘD Sin@ΦD, r Cos@ΘD Sin@ΦD, r Cos@ΦD Sin@ΘD<, 8Cos@ΘD, -r Sin@ΘD, 0<<
and determine the base vectors.
In[39]:= er = Transpose@TijD@@1DDeΘ = Transpose@TijD@@2DDeΦ = Transpose@TijD@@3DD
Out[39]= 8Cos@ΦD Sin@ΘD, Sin@ΘD Sin@ΦD, Cos@ΘD<
Out[40]= 8r Cos@ΘD Cos@ΦD, r Cos@ΘD Sin@ΦD, -r Sin@ΘD<
Out[41]= 8-r Sin@ΘD Sin@ΦD, r Cos@ΦD Sin@ΘD, 0<
Tensor_analysis_m6.nb 11

In[42]:= Nablaspher @func_, r_, Θ_, Φ_D = D@func@r, Θ, ΦD, rD *er + D@func@r, Θ, ΦD, ΘD *eΘ + D@func@r, Θ, ΦD, ΦD *eΦ
Out[42]= 9-r Sin@ΘD Sin@ΦD funcH0,0,1L@r, Θ, ΦD + r Cos@ΘD Cos@ΦD funcH0,1,0L@r, Θ, ΦD + Cos@ΦD Sin@ΘD funcH1,0,0L@r, Θ, ΦD,r Cos@ΦD Sin@ΘD funcH0,0,1L@r, Θ, ΦD + r Cos@ΘD Sin@ΦD funcH0,1,0L@r, Θ, ΦD + Sin@ΘD Sin@ΦD funcH1,0,0L@r, Θ, ΦD,-r Sin@ΘD funcH0,1,0L@r, Θ, ΦD + Cos@ΘD funcH1,0,0L@r, Θ, ΦD=
In[43]:= Assuming@r > 0, FullSimplify@Sqrt@x^2 + y^2 + z^2DDD
Out[43]= r
In[44]:= Rspher@r_, Θ_, Φ_D := r
In[45]:= Nablaspher@Rspher, r, Θ, ΦD �� FullSimplify
Out[45]= 8Cos@ΦD Sin@ΘD, Sin@ΘD Sin@ΦD, Cos@ΘD<
The same result looks quite different than the constant vector {1,0,0} from the Mathematica-way. However, the result is in perfect agreement, since
it is only a different way of expressing the unit vector in r-direction.
In[46]:= % � er
Out[46]= True
12 Tensor_analysis_m6.nb