terminales cpx controlador de ejes cpx-cmax - festo.com€¦ · controlador de ejes cpx-cmax 2...
TRANSCRIPT

Descripción delperfil decomunicación
FHPP para el
controlador
de ejes CMAX
Control y
diagnosis a través
del nodo CPX
Tipo CPX-CMAX-C1-1
559758
es 2017-09b
[8064996]
Controlador de ejes CPX-CMAX
Terminales CPX

Controlador de ejes CPX-CMAX
2 Festo – P.BE-CPX-CMAX-CONTROL-DE – es 2017-09b –
Manual original
P.BE-CPX-CMAX-CONTROL-DE
Interbus®, DeviceNet®, PI PROFIBUS PROFINET®, CC-Link® y EtherNET/IP® son marcas registradas de
los propietarios correspondientes de las marcas en determinados países.
Identificación de peligros e indicaciones para evitarlos:
AdvertenciaPeligros que pueden ocasionar lesiones graves e incluso la muerte
AtenciónPeligros que pueden ocasionar lesiones leves
Otros símbolos:
NotaDaños materiales o pérdida de funcionalidad
Recomendaciones, sugerencias y referencias a otras fuentes de documentación
Accesorios indispensables o convenientes
Información sobre el uso de los productos respetuoso con el medio ambiente
Identificadores de texto:
� Actividades que se pueden realizar en cualquier orden
1. Actividades que se tienen que realizar en el orden indicado
– Enumeraciones generales
� Resultado de una actuación/Referencias a informaciones adicionales

Controlador de ejes CPX-CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 3
Contenido – Controlador de ejes CPX-CMAX
Notas sobre la presente documentación 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Destinatarios 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Versiones 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Asistencia técnica 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Documentación del terminal CPX 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Documentación del Controlador de ejes CPX-CMAX 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1 Configuración del terminal CPX con el CMAX 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Aspectos de planificación referentes a la parametrización del CMAX 10. . . . . . . . . . . . . . . . .
1.1.1 Notas sobre los nodos de bus CPX disponibles 10. . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.2 Parámetros del CMAX y parámetros del nodo de bus 10. . . . . . . . . . . . . . . . . . . . .
1.2 Formato de datos 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Parametrización del CPX 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.1 Fail state o Idle mode 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.2 Comportamiento de arranque del terminal CPX 12. . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Notas sobre la puesta a punto a través del control de nivel superior 13. . . . . . . . . . . . . . . . .
2 Datos I/O y control secuencial 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Modos de funcionamiento 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.1 Modo de funcionamiento Selección de frase – Modo de frase 14. . . . . . . . . . . . . .
2.1.2 Modo de funcionamiento Tarea directa – Modo directo 14. . . . . . . . . . . . . . . . . . .
2.1.3 Modo Puesta a punto 15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.4 Modo de funcionamiento Parametrización 15. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.5 Cuadro general de las funciones disponibles en los modos de funcionamiento 16
2.2 Estructura de los datos cíclicos I/O en los modos de funcionamiento 17. . . . . . . . . . . . . . . .
2.2.1 Determinación del modo de funcionamiento con CCON 18. . . . . . . . . . . . . . . . . . .
2.2.2 Estructura de CCON/SCON 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.3 Datos I/O en modo de frase 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.4 Datos I/O en modo directo 27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.5 Datos I/O en el modo Puesta a punto 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.6 Datos I/O en el modo de funcionamiento Parametrización 37. . . . . . . . . . . . . . . . .
2.2.7 Valores efectivos y valores nominales principales 38. . . . . . . . . . . . . . . . . . . . . . . .
2.3 Máquina de estado FHPP 41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Establecer disponibilidad para funcionar 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.2 Iniciar órdenes de posicionamiento 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Funciones del accionamiento 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Descripción general del funcionamiento 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1 Control de posición 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.2 Regulación de fuerza 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

Controlador de ejes CPX-CMAX
4 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
3.1.3 Órdenes relativas 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.4 Comportamiento durante parada 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.5 Regulación de reposo 55. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.6 Categorías de calidad 55. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.7 Tratamiento de la unidad de bloqueo o freno 56. . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.8 Motion Complete (MC) 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.9 Bits de estado del controlador actualizados dinámicamente MOV, DEV y STILL 62
3.1.10 Limitación de valores nominales 68. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.11 Bit de vida 69. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Funciones de puesta a punto 70. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.1 prueba de movimiento 70. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.2 Recorrido de referencia 73. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.3 Identificación 76. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.4 Adaptación 79. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.5 Operación por actuación secuencial 80. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.6 Programación tipo teach-in 82. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Modo de frase 85. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 Inicio de una frase 86. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.2 Estructura de la frase 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.3 Conmutación progresiva de frases / encadenamiento de frases condicional
(PNU 402) 89. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Modo directo 96. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.1 Inicio de una orden de posicionamiento 98. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.2 Especificación continua del valor nominal (funcionamiento de seguimiento) 100. .
4 Diagnosis y tratamiento de errores 102. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Cuadro general de opciones de diagnosis 102. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Errores y advertencias 103. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.1 Efecto en el control secuencial y el eje; nivel de fallo 103. . . . . . . . . . . . . . . . . . . . .
4.2.2 Validación de errores y advertencias; tipo de reset 104. . . . . . . . . . . . . . . . . . . . . .
4.2.3 Representación de los números de error del CMAX en el terminal CPX 105. . . . . . .
4.2.4 Números de error y de advertencia 106. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Parámetros de diagnosis 126. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.1 Estado actual de diagnosis 126. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.2 Memoria de diagnosis 127. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.3 Estado de error e información adicional 129. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.4 Código de diagnosis e información adicional en caso de reset, conexión y
configuración 134. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Parametrización de mensajes de diagnosis 136. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5 Diagnosis mediante funciones estándar del terminal CPX 139. . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.1 Bits de estado del terminal CPX 139. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.2 Interfaz de diagnosis I/O y memoria de diagnosis 139. . . . . . . . . . . . . . . . . . . . . . .
4.5.3 Parametrización a través de la interfaz de diagnosis I/O 141. . . . . . . . . . . . . . . . . .

Controlador de ejes CPX-CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 5
5 Parametrización 143. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Cuadro general Opciones de parametrización 143. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Protección de acceso 143. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.1 Protección por palabra clave 143. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.2 Acceso con unidad de control de nivel superior FCT 145. . . . . . . . . . . . . . . . . . . . . .
5.2.3 Bloqueo dependiente del estado y del modo de funcionamiento 146. . . . . . . . . . . .
5.2.4 Desbloqueo y parada durante la parametrización 146. . . . . . . . . . . . . . . . . . . . . . .
5.3 Valores predeterminados globales 147. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Canal de parámetros Festo (FPC) 152. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.1 Identificadores de tarea, identificadores de respuesta y números de error 153. . . .
5.4.2 Características del sistema de medida 154. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5 Parametrización cíclica en el modo de funcionamiento Parametrización 155. . . . . . . . . . . . . .
5.5.1 Ejemplo de parametrización 156. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.2 Diagrama de flujo 159. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6 Parámetros del módulo CPX 160. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A Notas sobre la puesta a punto, asistencia técnica y firmware 161. . . . . . . . . . . . . . . . . . . . . .
A.1 Operaciones preliminares y resumen de la puesta a punto 161. . . . . . . . . . . . . . . . . . . . . . . . .
A.1.1 Comprobación del ramal de eje 161. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.2 Conexión de la alimentación y comportamiento al arranque 161. . . . . . . . . . . . . . .
A.2 Puesta a punto a través de la unidad de control de nivel superior 166. . . . . . . . . . . . . . . . . . .
A.2.1 C00: Parametrización básica 166. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.2 Instrucciones paso a paso para la parametrización básica 167. . . . . . . . . . . . . . . . .
A.2.3 Parametrización sin hardware 170. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.4 C03: Prueba de movimiento 170. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.5 Recorrido de referencia e identificación 170. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3 Funcionamiento y asistencia técnica 171. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3.1 Comparación entre valor real y nominal 171. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3.2 Puesta a punto a través del control después de sustituir componentes 173. . . . . .
A.3.3 Modificar la configuración nominal 174. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3.4 Reset de datos 175. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3.5 Actualización del firmware 176. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3.6 Comportamiento al arranque y Power down 176. . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3.7 Optimización del retardo de respuesta en caso de error E50 177. . . . . . . . . . . . . . .
A.3.8 Notas a E76 178. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.4 Diagramas de flujo para la programación 179. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.4.1 Creación de la disponibilidad para funcionar 179. . . . . . . . . . . . . . . . . . . . . . . . . . .
A.4.2 Iniciar frase 182. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.4.3 Confirmación de errores 183. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.4.4 Cambio del modo de funcionamiento 184. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.5 Versiones de firmware 185. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.5.1 Versión de firmware 2.3 185. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

Controlador de ejes CPX-CMAX
6 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
A.5.2 Versión de firmware 2.2 186. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.5.3 Versión de firmware 1.9 189. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.5.4 Versión de firmware 1.8 189. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.5.5 Versión de firmware 1.1 189. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.5.6 Versión de firmware 1.0 191. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.6 Relación entre proyecto, CMAX y plugin 192. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.7 Preguntas frecuentes sobre las versiones del firmare y del plugin 194. . . . . . . . . . . . . . . . . . .
A.8 Procedimiento para la actualización del firmware 197. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.8.1 Resumen de los pasos necesarios para descargar el firmware 197. . . . . . . . . . . . . .
A.8.2 Explicaciones de los pasos individuales 198. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B Fundamentos del CMAX 203. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1 Sistemas de medida del CMAX 203. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.1 Definición de las tablas del sistema de medida 203. . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.2 Activación de la tabla de sistema de medida 206. . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.3 Tabla de referencia y conversión de las unidades de medida 206. . . . . . . . . . . . . . .
B.2 Sistema de referencia de medida para actuadores neumáticos 208. . . . . . . . . . . . . . . . . . . . .
B.2.1 Sistema de referencia de medida con sistema de medición de recorrido
absoluto 208. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.2 Sistema de referencia de medida con sistema de medición de recorrido
incremental 210. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.3 Cálculo de las especificaciones del sistema de referencia 211. . . . . . . . . . . . . . . . .
B.2.4 Posiciones finales por software / hardware 213. . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.5 Consideración de opciones de accionamiento del DGCI con el sistema de
referencia de medida 216. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3 Accionamientos y sistemas de medición 219. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4 Consideración de la masa de la carga 221. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.5 Optimización del controlador 222. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.5.1 Factores del controlador para el control de posición 222. . . . . . . . . . . . . . . . . . . . .
B.5.2 Optimización del comportamiento de posicionamiento 224. . . . . . . . . . . . . . . . . . .
B.5.3 Factores del controlador para la regulación de fuerza 228. . . . . . . . . . . . . . . . . . . .
C Parámetro 229. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.1 Estructura general de parámetros del CMAX 229. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2 Descripción de los parámetros 231. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.1 Cuadro general de parámetros 231. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.2 Datos del equipo 239. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.3 Diagnosis 246. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.4 Datos de proceso 252. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.5 Tabla de frases 256. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.6 Datos del proyecto 264. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.7 Operación por actuación secuencial 271. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Controlador de ejes CPX-CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 7
C.2.8 Modo directo control de posición 273. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.9 Modo directo con control de fuerza 275. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.10 Valores predeterminados globales 277. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.11 Configuración del accionamiento 280. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.12 Ajustes de aplicación 288. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.13 Controlador de posición 295. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.14 Controlador de fuerza 298. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.15 Identificación 300. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.16 Datos del sistema 304. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.17 Textos de error 311. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
D Glosario 312. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Índice 314. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

Controlador de ejes CPX-CMAX
8 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Notas sobre la presente documentaciónEsta descripción contiene el perfil de comunicación para el controlador de ejes CPX-CMAX-C1-1. Este
perfil se basa en el Festo Handling and Positioning Profile, en lo sucesivo denominado por su
abreviación “FHPP”. Contiene información sobre el control, la diagnosis y la parametrización del
controlador de ejes.
� (Es absolutamente obligatorio respetar las descripciónes del sistema que figuran en
la descripción del sistema del CMAX � Tab. 2). La descripción del sistema también
contiene información sobre el montaje, la instalación y diagnosis del controlador de
ejes con los módulos y componentes en el ramal.
DestinatariosEsta documentación está destinada exclusivamente a especialistas formados en tecnología de
automatización y control, con experiencia en instalación, puesta a punto, programación y diagnosis de
sistemas de posicionamiento.
Versiones
Esta descripción se refiere a las siguientes versiones:
– Controlador de ejes CPX-CMAX-C1-1 con versión V 2.3 del firmware.
NotaAntes de utilizar una versión de firmware más reciente:
� Comprobar si hay disponible una versión más reciente del plugin de FCT o de la
documentación de usuario: � www.festo.com/sp, término de búsqueda:
CPX-CMAX-C1-1
Compatibilidad de las versiones del firmware y del plugin
El firmware del CMAX y la versión utilizada del plugin tienen que ser obligatoriamente compatibles
(versión en el momento de la impresión de esta descripción):
Firmware en el CMAX Plugin FCT compatible
2.3 (� Apéndice A.5.1) 2.3.1 (o posterior)
2.2 (� Apéndice A.5.2) 2.2.0 (o posterior)
1.9 (� Apéndice A.5.3) 1.8.0 (o posterior)
1.8 (� Apéndice A.5.4) 1.8.0 (o posterior)
1.1 (� Apéndice A.5.5) 1.1.0 (o posterior)
1.0 (� Apéndice A.5.6) 1.0.1 (o posterior)
Tab. 1 Cuadro general de versiones y compatibilidad
Utilizar como mínimo el plugin FCT compatible recomendado para el firmware. Más explicaciones
� Apéndice A.6.
� Recomendación: Instalar siempre la versión más reciente del plugin; al hacerlo no se sobrescriben
las versiones anteriores y siguen estando disponibles.

Controlador de ejes CPX-CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 9
� Informar al personal de servicio y a los programadores de la versiones del plugin y del firmware
utilizadas. Identificar el CMAX adecuadamente y, si es necesario, adjuntar la información sobre la
versión de firmware recibida.
Asistencia técnicaAnte cualquier problema técnico, diríjase al servicio local de postventa de Festo.
Documentación del terminal CPX
Información general básica sobre el modo de funcionamiento, montaje, instalación y
puesta a punto de terminales CPX � Descripción del sistema CPX, P.BE-CPX-SYS-...
(� www.festo.com/sp, término de búsqueda CPX). Información sobre otros módulos
electrónicos de CPX � Descripción del módulo electrónico correspondiente. Cuadro
general de la estructura de la documentación de usuario del terminal CPX � Descripción
del sistema CPX.
Documentación del Controlador de ejes CPX-CMAX
Tipo Tratamiento Código del producto Contenido
Descripción
del sistema
Controlador de
ejes CPX-CMAX
(descripción de
la parte
electrónica)
P.BE-CPX-CMAX-SYS-... – Montaje
– Instalación
– Puesta a punto
– Diagnosis
Descripción
del perfil de
comunicación
FHPP para el
controlador de
ejes CPX-CMAX
P.BE-CPX-CMAX-CONTROL-... – Control
– Programación
– Diagnosis de un CMAX con el
nodo de bus utilizado
Ayuda del
software
Ayuda para el Festo Configuration Tool (FCT)
con plugin CMAX
Configuración y puesta a punto
del controlador de ejes CMAX con
el FCT
Instrucciones
de utilización
Instrucciones de utilización de los componentes utilizados
Tab. 2 Documentación del Controlador de ejes CPX-CMAX
Las versiones electrónicas de la documentación del controlador de ejes CMAX así como
Application Notes para el uso de distintos nodos CPX están disponibles en Internet
� www.festo.com/sp, término de búsqueda CPX-CMAX-C1-1

1 Configuración del terminal CPX con el CMAX
10 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
1 Configuración del terminal CPX con el CMAX
1.1 Aspectos de planificación referentes a la parametrización del CMAX
1.1.1 Notas sobre los nodos de bus CPX disponibles
Lista de nodos de bus CPX (protocolos de bus) y bloques de control permitidos y de las
revisiones necesarias en la descripción del sistema del CMAX.
Con el Festo Field Device Tools es posible comprobar y actualizar el firmware de muchos
nodos de bus. El Festo Field Device Tool está disponible en el portal de soporte técnico
� www.festo.com/sp, término de búsqueda “FFT”.
La información actual también está disponible en el catálogo
� www.festo.com/catalogue.
Observar también las notas sobre la versión del software en la documentación del nodo
de bus o del bloque de control.
Las indicaciones generales sobre la parametrización de un nodo de bus � Descripción
del nodo de bus utilizado.
1.1.2 Parámetros del CMAX y parámetros del nodo de busEl CMAX dispone de diversos parámetros específicos de módulo. Estos parámetros internos del CMAX
no pueden guardarse como parámetros de módulo en el nodo CPX en el nodo de bus, sino
exclusivamente en el CMAX.
Por lo tanto, el acceso a los parámetros del CMAX no se efectúa como de costumbre a través de la
interfaz de diagnosis I/O ni de los canales correspondientes específicos del nodo de bus, sino solo a
través de la interfaz de servicio o de red del nodo con FCT o a través del bus en el modo de
funcionamiento de parametrización del CMAX.
NotaEn terminales CPX con CMAX, al cambiar el terminal CPX completo o el módulo CMAX
siempre es necesario volver a ejecutar la parametrización y la puesta a punto del CMAX
porque los parámetros y los datos definidos durante la puesta a punto se guardan
únicamente en el CMAX.
Los parámetros internos del CMAX pueden modificarse mediante los siguientes accesos:
– Festo Configuration Tool (FCT) con plugin CMAX,
– comunicación cíclica del bus de campo con los datos de control y de estado del FHPP (modo de
funcionamiento Parametrización) � Secciones 2.2.6 y 5.5,
– comunicación acíclica del bus de campo (p. ej., PROFIBUS DPV1) � Sección 5.6, así como en la
Application Note � www.festo.com/sp.
1 Configuración del terminal CPX con el CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 11
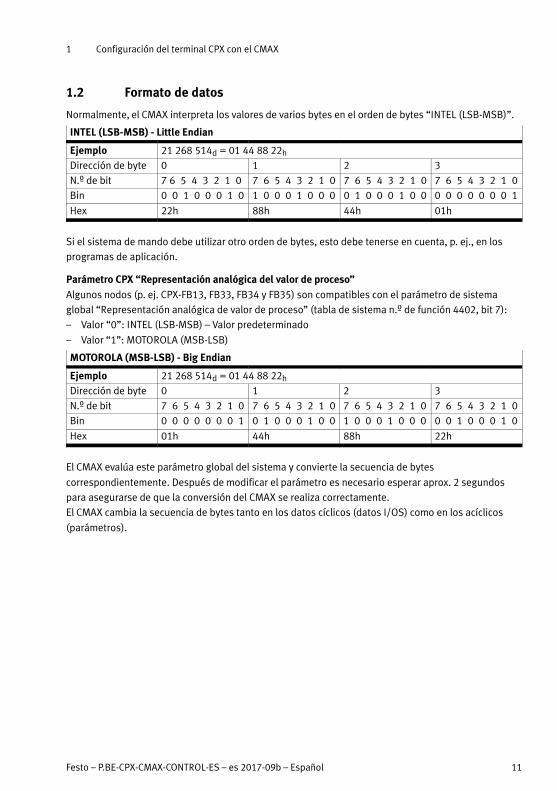
1.2 Formato de datos
Normalmente, el CMAX interpreta los valores de varios bytes en el orden de bytes “INTEL (LSB-MSB)”.
INTEL (LSB-MSB) - Little Endian
Ejemplo 21�268�514d = 01�44�88�22h
Dirección de byte 0 1 2 3
N.º de bit 7�6 5 4 3 2 1 0 7 6 5 4 3 2 1 0 7 6 5 4 3 2 1 0 7 6 5 4 3 2 1 0
Bin 0 0 1 0 0 0 1 0 1 0 0 0 1 0 0 0 0 1 0 0 0 1 0 0 0 0 0 0 0 0 0 1
Hex 22h 88h 44h 01h
Si el sistema de mando debe utilizar otro orden de bytes, esto debe tenerse en cuenta, p. ej., en los
programas de aplicación.
Parámetro CPX “Representación analógica del valor de proceso”
Algunos nodos (p. ej. CPX-FB13, FB33, FB34 y FB35) son compatibles con el parámetro de sistema
global “Representación analógica de valor de proceso” (tabla de sistema n.º de función 4402, bit 7):
– Valor “0”: INTEL (LSB-MSB) – Valor predeterminado
– Valor “1”: MOTOROLA (MSB-LSB)
MOTOROLA (MSB-LSB) - Big Endian
Ejemplo 21�268�514d = 01�44�88�22h
Dirección de byte 0 1 2 3
N.º de bit 7 6 5 4 3 2 1 0 7 6 5 4 3 2 1 0 7 6 5 4 3 2 1 0 7 6 5 4 3 2 1 0
Bin 0 0 0 0 0 0 0 1 0 1 0 0 0 1 0 0 1 0 0 0 1 0 0 0 0 0 1 0 0 0 1 0
Hex 01h 44h 88h 22h
El CMAX evalúa este parámetro global del sistema y convierte la secuencia de bytes
correspondientemente. Después de modificar el parámetro es necesario esperar aprox. 2 segundos
para asegurarse de que la conversión del CMAX se realiza correctamente.
El CMAX cambia la secuencia de bytes tanto en los datos cíclicos (datos I/OS) como en los acíclicos
(parámetros).

1 Configuración del terminal CPX con el CMAX
12 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
1.3 Parametrización del CPX
1.3.1 Fail state o Idle mode
Dependiendo de la aplicación y del nodo de bus utilizado, comprobar si es necesario configurar una
parametrización de Fail state o Idle mode para el módulo CMAX seleccionado en el nodo de bus.
El Fail state o Idle mode permite establecer estados I/O definidos en caso de fallo del bus o activación
del Idle mode del terminal CPX. Estas funciones no están disponibles para todos los nodos de bus.
Más información sobre los distintos nodos CPX en la Application Note correspondiente en
el portal de soporte técnico � www.festo.com/sp.
1.3.2 Comportamiento de arranque del terminal CPXNormalmente, la parametrización deseada del terminal CPX puede establecerse en la fase de arranque
o tras las interrupciones del bus de campo a través del módulo enchufable o del escáner/master de
bus, siempre que ello sea compatible con el protocolo del bus de campo empleado.
NotaAl cambiar un CMAX la parametrización no se efectúa automáticamente a través del
nodo de bus.
En este caso, es obligatorio realizar la parametrización correcta del CMAX igual que
durante la primera puesta a punto � Sección 1.1.2.
Observar las notas sobre el cambio de componentes en la descripción del sistema
del CMAX.

1 Configuración del terminal CPX con el CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 13
1.4 Notas sobre la puesta a punto a través del control de nivel superior
Por lo general, la puesta a punto del CMAX puede controlarse en su integridad a través del control de
nivel superior o del control integrado en el nodo CPX.
Sin embargo, esto requiere una programación adicional del sistema master y la adopción de medidas
apropiadas para supervisar el accionamiento mientras se ejecutan la funciones de la puesta a punto.
Recomendación:
� Ejecutar la primera puesta a punto con el FCT.
En la Tab. 1.1 se muestra un resumen de las funciones importantes con referencias a información
detallada que debe tenerse en cuenta durante una puesta a punto.
Función Descripción Tema Información
Desarrollo
completo de la
puesta a punto
Preparación para la puesta a
punto y su ejecución paso a
paso
Notas sobre la puesta a
punto, asistencia técnica y
firmware
� Apéndice A
Durante toda la
puesta a punto
Control y supervisión del
CMAX
Bytes de control y de estado � Capítulo 2
Diagnosis � Capítulo 4
Parametrización Lectura de la configuración
actual detectada, escritura
de la configuración teórica,
Canal de parámetros Festo
FPC (Festo Parameter
Channel)
� Sección 5.4
g ,
parametrización de los
datos de aplicación, etc.Modo de funcionamiento
Parametrización
� Sección 5.5
Funciones de
puesta a punto
Ejecución de las funciones
de puesta a punto, prueba
de movimiento,
identificación, funciones
teach-in
Modo Puesta a punto � Sección 2.2.5
Funciones de puesta a punto � Sección 3.2
Tab. 1.1 Información sobre la puesta a punto a través del control de nivel superior
Observar también las indicaciones de la descripción de sistema del CMAX (� Capítulo
“Puesta a punto”).

2 Datos I/O y control secuencial
14 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
2 Datos I/O y control secuencial
2.1 Modos de funcionamiento
El CMAX dispone de 4 modos de funcionamiento. Estos difieren en el contenido y la estructura de los
datos cíclicos I/O del CMAX.
2.1.1 Modo de funcionamiento Selección de frase – Modo de fraseEl CMAX dispone de más de 128 frases, (hasta FW 2.2 64 frases) que contienen toda la información
necesaria para una orden de posicionamiento. Una frase tiene que parametrizarse previamente, p. ej.
con FCT.
En el modo de frase se transmite a los datos de salida de la unidad de control de nivel superior el
número de frase que debe ejecutar el CMAX con el siguiente arranque. Los datos de entrada contienen
el número de la última frase ejecutada.
El CMAX no contiene ningún programa de usuario. Las frases no se pueden procesar automáticamente
con una lógica programada. El CMAX no se puede hacer funcionar en modo Stand Alone sin una unidad
de control de nivel superior.
Sin embargo, sí es posible encadenar varias frases y ejecutarlas consecutivamente mediante un
comando de inicio. También es posible definir una conmutación progresiva de frases antes de alcanzar
el valor objetivo (posición o fuerza).
Esto permite crear perfiles de desplazamiento sin que lleguen a surtir efecto los tiempos de reposo
provocados durante la transmisión al bus de campo y el tiempo de ciclo del control.
Información detallada sobre el modo de frase � Sección 3.3.
Cuadro general de los datos I/O � Sección 2.2.3.
2.1.2 Modo de funcionamiento Tarea directa – Modo directoEn el modo directo se formulan órdenes de posicionamiento (desplazar a una posición o ajustar fuerza)
directamente en los datos de salida del control y se transmiten al CMAX. La aplicación típica calcula
dinámicamente el nuevo valor objetivo para cada orden de posicionamiento. Con ello es posible, p. ej.,
llevar a cabo fácilmente una adaptación a diferentes tamaños de pieza. En este modo de
funcionamiento se pueden modificar directamente de forma dinámica el valor objetivo (posición o
fuerza) y alternativamente la velocidad, la carga útil móvil o la rampa de fuerza para cada orden de
posicionamiento. Los valores nominales se administran o calculan en el control y se envían
directamente al CMAX.
Información detallada sobre del modo directo � Sección 3.4.
Cuadro general de los datos I/O � Sección 2.2.4.

2 Datos I/O y control secuencial
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 15
2.1.3 Modo Puesta a puntoEl modo Puesta a punto sirve para poner en funcionamiento el CMAX, p. ej. para realizar recorridos de
identificación, etc. Están permitidas las siguientes funciones:
– Parametrización de todos los datos de eje (con el FCT o a través del control con ayuda del FPC
(Festo Parameter Channel))
– Actuación secuencial, programación tipo teach-in, referenciado
– Prueba de movimiento, Identificación, otras funciones de la puesta a punto
Las órdenes de posicionamiento (modo de frase, modo directo) no están permitidas. Este modo de
funcionamiento sirve, sobre todo, para separar claramente las funciones de puesta a punto y el
funcionamiento normal (órdenes de posicionamiento en el modo de frase o directo) a fin de reducir los
errores de funcionamiento.
Información sobre las funciones de la puesta a punto � Sección 3.2.
Cuadro general de los datos I/O � Sección 2.2.5.
2.1.4 Modo de funcionamiento ParametrizaciónEn el modo de funcionamiento Parametrización pueden transferirse parámetros a los datos cíclicos I/O
del FHPP previstos en realidad para controlar el CMAX. Al hacerlo, la asignación del primer byte de
control CCON para el control de la habilitación y el modo de funcionamiento del CMAX siempre es igual.
Los siete bytes restantes se asignan a través del Festo Parameter Channel (FPC).
El modo de funcionamiento Parametrización puede activarse en el estado “Accionamiento bloqueado”
o “Accionamiento habilitado”. El controlador se activa o no respectivamente. Por tanto, puede haber
una habilitación y con ella es posible parar un accionamiento vertical en la posición actual.
No obstante, en este modo de funcionamiento no es posible iniciar una orden de posicionamiento.
Información sobre la parametrización � Capítulo 5.
Cuadro general de los datos I/O � Sección 2.2.6.

2 Datos I/O y control secuencial
16 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
2.1.5 Cuadro general de las funciones disponibles en los modos de funcionamiento
Función Modo de funcionamientoModo defrase
Mododirecto
Puesta apunto
Parametrización
Parametrización en los datos cíclicos I/O1) x
Parametrización acíclica de datos de eje2) x
Parametrización acíclica de datos nominales x x x
Actuación secuencial x x x
Programación tipo teach-in de valores nominales x
Programación tipo teach-in del punto cero del
proyecto, posiciones finales por software
x
Referenciado x x x
Posicionamiento punto a punto x x
Posicionamiento continuo, funcionamiento de
seguimiento
x
Regulación de fuerza punto a punto x x
Conmutación flotante del valor teórico (nueva orden
de posicionamiento antes de MC)
x x
Identificación x
Prueba de movimiento x
1) Solo permitido cuando CCON.STOP = 0, en algunos parámetros también CCON.ENABLE = 0
2) Solo permitido cuando CCON.ENABLE = 0
Tab. 2.1 Funciones disponibles en los modos de funcionamiento
Descripción de las funciones del accionamiento � Capítulo 3.

2 Datos I/O y control secuencial
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 17
2.2 Estructura de los datos cíclicos I/O en los modos de funcionamiento
Datos Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Datos O CCON CPOS Bytes de control dependientes del modo de funcionamiento
Datos I SCON SPOS Bytes de estado dependientes del modo de funcionamiento
Función El byte 1 permanece
en su función en
todos los modos de
funcionamiento.
Contiene información
de control y de
estado, p. ej. para la
habilitación y el ajuste
del modo de
funcionamiento.
El byte 2 es para los
modos de
funcionamiento
selección de frase,
tarea directa y puesta
a punto.
Los bytes 3 a 8 dependen del tipo de funcionamiento seleccionado
y transmiten otros bytes de control y estado (p. ej., CDIR, SDIR,
etc.), así como valores nominales y efectivos:
– número de frase o posición nominal en los datos de salida
– acuse de recibo de la posición real y número de frase en los
datos de entrada
– otros valores nominales y efectivos dependientes de los modos
de funcionamiento y de regulación
Con PNU 523 se puede configurar parcialmente el contenido de los
bytes 3 a 8.
ProcedimientoDeterminar primero el modo de funcionamiento en el byte de control CCON � Secciones 2.2.1 y 2.2.2.
De ello dependen la asignación del resto de bytes de control y de estado:
– Modo de frase � Sección 2.2.3
– Modo directo � Sección 2.2.4
– Puesta a punto � Sección 2.2.5
– Parametrización � Sección 2.2.6
Recomendación:
� Durante el funcionamiento (modo de frase o directo), activar el bit de control
CCON.LOCK. De este modo, la unidad de control de nivel superior puede garantizar
que el ciclo programado no sufra interferencias causadas por un acceso no deseado
con el FCT.
� Evaluar bit de estado SCON.FCT. Durante la ejecución del programa del control tener
en cuenta que falta el acceso al control.

2 Datos I/O y control secuencial
18 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
2.2.1 Determinación del modo de funcionamiento con CCONEl modo de funcionamiento se determina con los bytes de control CCON.OPM1 y CCON.OPM2 y se
señala con acuse de recibo en los bytes de estado SCON.OPM1 y SCON.OPM2 (� Tab. 2.2).
Modo de funcionamiento
CCON/SCON Descripción
.OPM2 .OPM1
Modo de frase 0 0 La unidad de control de nivel superior selecciona una frase de
la tabla de frases guardada en el CMAX. Una frase contiene
todos los parámetros que están especificados para una orden
de posicionamiento. El número de frase se transfiere a los
datos cíclicos de I/O como valor nominal o efectivo.
Modo directo 0 1 La orden de posicionamiento se transmite directamente a los
datos cíclicos I/O. Asimismo se transfieren los valores
nominales más importantes (posición, velocidad, fuerza). Los
parámetros complementarios (p. ej. aceleración) se determinan
mediante la parametrización.
Puesta a punto 1 0 Pueden ejecutarse las funciones de la puesta a punto (p. ej.,
identificación). Una orden de posicionamiento (orden de
posicionado o de fuerza) no es posible.
Parametrización 1 1 Se transmite un parámetro a los datos I/O conforme al
protocolo FPC. Una orden de posicionamiento (orden de
posicionado o de fuerza) no es posible.
Tab. 2.2 Resumen de los modos de funcionamiento con CMAX
Conmutación del modo de funcionamientoSolo está permitido conmutar el modo de funcionamiento a Puesta a punto o Parametrización en el estado
“Accionamiento bloqueado” (CCON.ENABLE = 0) o en el estado “Accionamiento habilitado” (CCON.STOP =
0). La conmutación entre modo de frase y modo directo también está permitida en el estado “Preparado” si
hay un MC (SPOS.MC = 1). En el estado “Error” también es posible conmutar el modo de funcionamiento.
Durante la conmutación del modo de funcionamiento, el significado de los valores nominales y
efectivos en los bytes 2 ... 8 en la unidad de control de nivel superior y en el CMAX no coincide. Por ello,
en cada conmutación debe esperarse el acuse de recibo de la conmutación antes de ejecutar la
siguiente orden. Esto también es válido para la conmutación entre modo directo y modo de frase.
Recomendación: Durante la conmutación del modo de funcionamiento, en principio todos los bytes de
valor nominal 2 ... 8 se deben poner en 0 para evitar valores nominales erróneos en la próxima orden de
posicionamiento.
Diagrama de flujo de la programación de la unidad de control de nivel superior
� Apéndice A.4.4.
Nota sobre la respuesta en función del tiempoLa conmutación entre modo de frase y modo directo tiene lugar en el sistema CPX (nodo CPX y CMAX)
típicamente en un plazo de 5 a 10 ms. A esto se añaden los tiempos de transmisión de bus y el tiempo
de ciclo del control. Este tiempo de conmutación debe tenerse en cuenta durante la programación de la
aplicación.

2 Datos I/O y control secuencial
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 19
2.2.2 Estructura de CCON/SCON
CCONCon el byte de control 1 (CCON) se controlan todos los estados que deben estar disponibles en todos
los modos de funcionamiento.
Asignación del byte de control CCON (byte 1)
CCON B7OPM2
B6OPM1
B5LOCK
B4–
B3RESET
B2BRAKE
B1STOP
B0ENABLE
Modo de
funciona
miento 2
Modo de
funciona
miento 1
Bloquear
acceso
FCT
– Confirmar
error
Soltar
freno
Habilitar
funciona
miento
Habilitar
accionam
iento
SCONEl bit de estado 1 (SCON) indica el estado del CMAX en todos los modos de funcionamiento.
Asignación del byte de estado SCON (byte 1)
SCON B7OPM2
B6OPM1
B5FCT
B424VL
B3FAULT
B2WARN
B1READY
B0ENABLED
Modo de
funciona
miento 2
Modo de
funciona
miento 1
Mando del
equipo FCT
Tensión
de carga
Error Adverten
cia
Funciona
miento
habilitado
Accionam
iento ha
bilitado
El modo de funcionamiento se fija con CCON.OPM1 y OPM2 y se señala en SCON.OPM1 y OPM2.
La cooperación de los bits de control puede hallarse en la descripción del control
secuencial � Capítulo 3.
Diagramas de flujo de la programación de la unidad de control de nivel superior
� Apéndice A.4.

2 Datos I/O y control secuencial
20 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Byte de control 1 (CCON)Bit ES EN Descripción
B0ENABLE
Habilitar ac
cionamiento
Enable Drive = 0: Bloquear accionamiento
= 1: Accionamiento habilitado, el controlador se
activa (“close loop control activated”)
B1STOP
Habilitar fun
cionamiento
Enable
Operation
= 0: Activar parada (eliminar parada + orden de
posicionamiento), � Sección 3.1.4
= 1: Habilitar funcionamiento, no hay parada.
No permitido en el modo de funcionamiento
Parametrización.
Si hay una señal 1 en el modo de funcionamiento
Parametrización, se genera una advertencia.
B2BRAKE
Soltar freno Open Brake = 0: Activar unidad de bloqueo/freno (0 V en la salida
VPWP)
= 1: Soltar unidad de bloqueo/freno (24 V en la
salida VPWP)
� Sección 3.1.7
B3RESET
Confirmar
error
Reset Fault Con un flanco ascendente se borra un mensaje de error
pendiente y en caso de éxito se abandona el estado
“Error”. Diagrama de flujo de la programación de la
unidad de control de nivel superior � Apéndice A.4.3.
B4–
– – Reservado, debe ser 0.
Si hay una señal 1 se genera una advertencia.
B5LOCK
Bloquear
acceso FCT
Lock FCT
Access
Acceso a la interfaz de servicio o de red:
= 0: El FCT puede asumir el mando del equipo (para
modificar parámetros o controlar entradas).
= 1: El FCT solo puede observar pero no asumir el
mando del equipo (FCT).
B6OPM1
Modo de fun Operating Bit 7 Bit 6 Seleccionar modo de funcionamientocionamiento
1/2
p g
Mode 1/2 0 0 Modo de frase � Sección 2.2.3
B7OPM2
0 1 Modo directo � Sección 2.2.4
1 0 Puesta a punto � Sección 2.2.5
1 1 Parametrización � Sección 2.2.6
2 Datos I/O y control secuencial
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 21
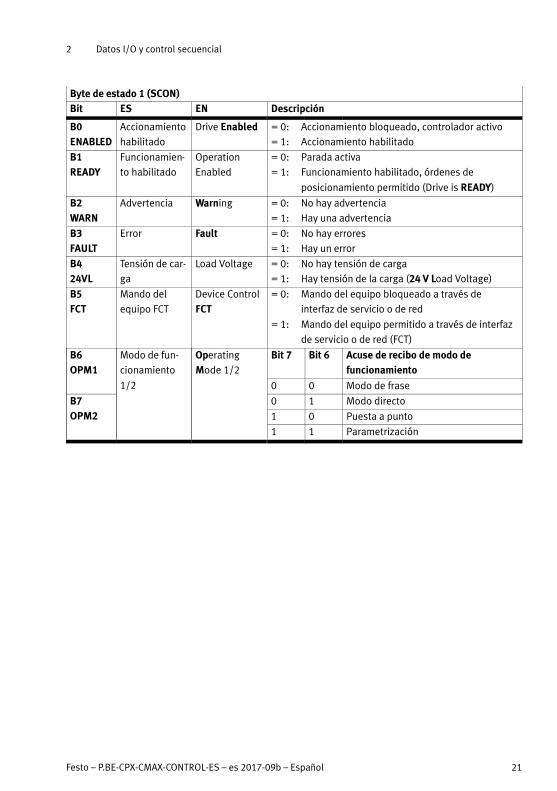
Byte de estado 1 (SCON)Bit ES EN Descripción
B0ENABLED
Accionamiento
habilitado
Drive Enabled = 0: Accionamiento bloqueado, controlador activo
= 1: Accionamiento habilitado
B1READY
Funcionamien
to habilitado
Operation
Enabled
= 0: Parada activa
= 1: Funcionamiento habilitado, órdenes de
posicionamiento permitido (Drive is READY)
B2WARN
Advertencia Warning = 0: No hay advertencia
= 1: Hay una advertencia
B3FAULT
Error Fault = 0: No hay errores
= 1: Hay un error
B424VL
Tensión de car
ga
Load Voltage = 0: No hay tensión de carga
= 1: Hay tensión de la carga (24 V Load Voltage)
B5FCT
Mando del
equipo FCT
Device Control
FCT= 0: Mando del equipo bloqueado a través de
interfaz de servicio o de red
= 1: Mando del equipo permitido a través de interfaz
de servicio o de red (FCT)
B6OPM1
Modo de fun
cionamiento
1/2
Operating
Mode 1/2
Bit 7 Bit 6 Acuse de recibo de modo defuncionamiento
0 0 Modo de frase
B7OPM2
0 1 Modo directo
1 0 Puesta a punto
1 1 Parametrización

2 Datos I/O y control secuencial
22 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
2.2.3 Datos I/O en modo de frase
Diagrama de flujo de la programación de la unidad de control de nivel superior
� Apéndice A.4.2.
Datos I/O: Modo de fraseDatos Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Datos O CCON CPOS Número
de frase
Reser
vado
Reservado
Datos I SCON SPOS Número
de frase
Valor
efectivo
secun
dario
Valor efectivo principal (posición real,
fuerza real)
Asignación de los bytes de control y de estado (modo de frase):
Asignación de los bytes de control (modo de frase)
CCONByte 1
B7OPM2
B6OPM1
B5LOCK
B4–
B3RESET
B2BRAKE
B1STOP
B0ENABLE
Modo de
funcionamiento 1/2
Bloquear
acceso
FCT
– Confirmar
error
Soltar
freno
Habilitar
funciona
miento
Habilitar
accionam
iento
CPOSByte 2
B7–
B6–
B5TEACH
B4JOGN
B3JOGP
B2HOM
B1START
B0–
– – Programar
valor por
teach-in
Actuación
secuencial
negativa
Actuación
secuencial
positiva
Iniciar
recorrido
de
referencia
Iniciar or
den de
posicio
namiento
–
Númerode frase
Byte 3
Byte 3: número de la frase que debe iniciarse (1 ... 128).
Reservado
Byte 4
Reservado = 0
Reservado
Bytes 5...8
Reservado = 0

2 Datos I/O y control secuencial
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 23
Asignación de los bytes de estado (modo de frase)
SCONByte 1
B7OPM2
B6OPM1
B5FCT
B424VL
B3FAULT
B2WARN
B1READY
B0ENABLED
Modo defuncionamiento 1/2
Mando delequipo FCT
Tensiónde carga
Error Advertencia
Funcionamientohabilitado
Accionamiento habilitado
SPOSByte 2
B7REF
B6STILL
B5DEV
B4MOV
B3TEACH
B2MC
B1ACK
B0LIFE
Accionamientoreferenciado
Advertencia dereposo
Error deseguimiento
El eje semueve
Confirmación deteach-in
MotionComplete
Confirmación deinicio
Bit devida
Númerode fraseByte 3
Acuse de recibo de la última frase iniciada (1 ... 128). En caso de un encadenamiento de frases, el número de frase real incluye siempre elnúmero de frase ejecutado realmente en la actualidad, es decir, se cambia sin flanco deinicio en la conmutación progresiva de frases.
ValorefectivosecundarioByte 4
Depende de la parametrización (PNU 523:03/07):– RSB (ver asignación abajo)– Número de error actual o número de error/número de advertencia
Asignación de Record Status Byte (RSB)
B7–
B6–
B5XLIM
B4VLIM
B3RCE
B2COM1
B1RCC
B0RC1
– – Carreracrítica alcanzada
Velocidadcrítica alcanzada
Error conmut.progr.frases
Modo decontrol 1
Todas lasfrasesejecutadas
1ª fraseejecutada
ValorefectivoprincipalBytes5...8
Depende de la parametrización (PNU 523:04/08):– Posición real en el sistema de medida fijado � Apéndice B.1– Fuerza real en el sistema de medida fijado � Apéndice B.1– Combinación fuerza real y posición real con escalado adaptado � Sección 2.2.7La regulación de fuerza y la indicación de valores de fuerza/par no son compatibles conlos actuadores giratorios.

2 Datos I/O y control secuencial
24 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Byte de control 2 (CPOS) – Modo de fraseBit ES EN Descripción
B0–
– – Reservado, debe ser 0.
Si hay una señal 1 se genera una advertencia.
B1START
Iniciar orden
de posiciona
miento
StartMovement
Command
Mediante un flanco ascendente se acepta el número de
frase actual y se inicia la frase.
B2HOM
Iniciar
recorrido de
referencia
Start Homing Con un flanco ascendente se inicia el recorrido de
referencia con los parámetros ajustados, el
referenciado se pone a cero.
Con un sistema de medición absoluto se comunica un
error.
B3JOGP
Actuación
secuencial
positiva
Jog Positive El accionamiento se mueve a la velocidad especificada
en el sentido de valores efectivos mayores, mientras
este bit esté activo.
B4JOGN
Actuación
secuencial
negativa
Jog Negative El accionamiento se mueve a la velocidad especificada
en el sentido de valores efectivos menores mientras el
bit esté activo.
B5TEACH
Programar
valor por
teach-in
Teach Value Con un flanco descendente, el valor efectivo actual se
transfiere al registro de valores nominales de la frase
direccionada actualmente.
Con un flanco ascendente: Preparar programación
teach-in (aceptar número de frase destino teach-in).
B6–
– – Reservado, debe ser 0.
Si hay una señal 1 se genera una advertencia.
B7–
– – Reservado, debe ser 0.
Si hay una señal 1 se genera una advertencia.
El byte de control 2 (CPOS) controla las secuencias de posicionamiento en cuanto se desbloquea el
accionamiento.

2 Datos I/O y control secuencial
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 25
Byte de estado 2 (SPOS) – Modo de fraseBit ES EN Descripción
B0LIFE
Bit de vida Sign of Life Bit de vida (� Sección 3.1.11)
B1ACK
Confirmación
de inicio
Acknowledge
Start
= 0: Preparado para iniciar
= 1: Inicio ejecutado1)
B2MC
Motion
Complete
Motion
Complete
= 0: Orden de posicionamiento activa
= 1: Orden de posicionamiento finalizada (también
en caso de error)2)
B3TEACH
Confirmación
de teach-in
Acknowledge
Teach= 0: Teach-in ejecutado, valor efectivo aceptado
= 1: Preparado para Teach-in
B4MOV
El acciona
miento se
mueve
Drive is
moving
Control del movimiento (� Sección 3.1.9)
= 0: El accionamiento no se mueve
= 1: El accionamiento se mueve
B5DEV
Error de
seguimiento
Deviation
Warning
Control de la tolerancia o de error de seguimiento
(� Sección 3.1.9)
= 0: No hay error de seguimiento / dentro de la
tolerancia
= 1: Error de seguimiento activo / fuera de la
toleranciaB6STILL
Advertencia
de reposo
StandstillWarning
Supervisión de reposo (� Sección 3.1.9)
= 0: Advertencia de reposo no activada
= 1: Advertencia de reposo activada, el
accionamiento se ha movido tras MC
B7REF
Accionamiento
referenciado
Drive is
referenced
= 0: Debe realizarse un recorrido de referencia
= 1: Hay información de referencia, no hay que
realizar un recorrido de referencia
1) Al programar el handshake de CPOS.START y de SPOS.ACK también deben observarse siempre los errores pendientes, porque
SPOS.ACK no se activa en caso de error.
2) MC se activa tras la conexión (estado “Accionamiento bloqueado”).

2 Datos I/O y control secuencial
26 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Byte de estado 4 (RSB) – Modo de fraseBit ES EN Descripción
B0RC1
1ª frase
ejecutada
1st Record
complete1)Si se ha configurado una condición de conmutación
progresiva como mínimo:
= 0: La primera condición de conmutación progresiva
aún no se ha alcanzado.
= 1: Se ha ejecutado la primera condición de
conmutación progresiva.B1RCC
Todas las
frases
ejecutadas
All Records
Complete1)Si se ha configurado una condición de conmutación
progresiva como mínimo y Motion Complete (SPOS.MC)
está activado:
= 0: Condición de conmutación no alcanzada,
conmutación progresiva de frases interrumpida.
= 1: El encadenamiento de frases se ha procesado
por completo.
B2COM1
Modo de
control 1
Control
Mode 1Acuse de recibo modo de control 1:
= 0: Control de posición activo
= 1: Regulación de fuerza activa
B3RCE
Error en la con
mutación
progresiva de
frases
Error in Record
Sequencing1)Si se ha configurado una condición de conmutación
progresiva como mínimo:
= 0: No hay errores en la conmutación progresiva de
frases
= 1: No se ha realizado la conmutación progresiva de
frases, interrumpida, se comunica un errorB4VLIM
Velocidad
crítica
alcanzada
Critical
velocity
reached
Solo en la regulación de fuerza:
= 0: Velocidad crítica no alcanzada
= 1: Velocidad crítica (V-Limit) alcanzada, se
comunica un error
B5XLIM
Carrera crítica
alcanzada
Critical stroke
reached
Solo en la regulación de fuerza:
= 0: Carrera crítica no alcanzada
= 1: Carrera crítica alcanzada (X-Limit), se comunica
un error
B6–
– – Reservado
B7–
– – Reservado
1) Conmutación progresiva de frases
El byte de estado RSB es el acuse de recibo de la orden de posicionamiento en el modo de frase.
Si no se ha parametrizado de otro modo con PNU523:03/07, el byte de estado de registro RSB se
transmite en el modo de frase como byte 4. Todos los bits se reponen en el inicio y se actualizan
dinámicamente.

2 Datos I/O y control secuencial
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 27
2.2.4 Datos I/O en modo directo
Datos I/O: Modo directoDatos Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Datos O CCON CPOS CDIR Valornom.secundario
Valor nominal principal(posición nominal, fuerza nominal)
Datos I SCON SPOS SDIR Valorefectivosecundario
Valor efectivo principal(posición real, fuerza real)
Asignación de los bytes de control y de estado (modo directo):
Asignación de los bytes de control (modo directo)
CCONByte 1
B7OPM2
B6OPM1
B5LOCK
B4–
B3RESET
B2BRAKE
B1STOP
B0ENABLE
Modo defuncionamiento 1/2
BloquearaccesoFCT
– Confirmarerror
Soltarfreno
Habilitarfuncionamiento
Habilitaraccionamiento
CPOSByte 2
B7–
B6–
B5TEACH
B4JOGN
B3JOGP
B2HOM
B1START
B0–
– – Programarvalor porteach-in
Actuaciónsecuencialnegativa
Actuaciónsecuencialpositiva
Iniciarrecorridodereferencia
Iniciar orden deposicionamiento
–
CDIRByte 3
B7–
B6FAST
B5XLIM
B4VLIM
B3CONT
B2COM2
B1COM1
B0REL
– Paradarápida
Desactivarcontrolcarrera
Desactivarcontrolvelocidad
Funcionamiento deseguimiento
Modo decontrol 2 (perfil)
Modo decontrol 1 (posición,fuerza)
Valornominalrelativo
ValornominalsecundarioByte 4
Depende del modo de control (posición/fuerza) y de la parametrización (PNU 523:01/05):– Control de posición: Velocidad en porcentaje del valor básico (PNU 600 o 540)
– Regulación de fuerza: Rampa de fuerza en porcentaje del valor básico (PNU 608 o
550)
– Regulación de posición/fuerza: Carga útil en porcentaje del valor básico (PNU 605 o
544 o PNU 551)
El valor nominal se acepta con flanco ascendente en CPOS.START.
ValornominalprincipalBytes5...8
Depende del modo de control (posición/fuerza):
– Control de posición: Position en el sistema de medida fijado � Apéndice B.1
– Control de fuerza: Fuerza en el sistema de media fijado � Apéndice B.1
– De manera opcional pueden transmitirse al mismo tiempo el valor nominal de posición
y de fuerza (con 16 bits cada uno y un escalado adaptado) � Sección 2.2.7
El valor nominal se acepta con flanco ascendente en CPOS.START.
En el funcionamiento de seguimiento, la posición nominal se acepta continuamente des
de el inicio hasta el fin del funcionamiento de seguimiento.

2 Datos I/O y control secuencial
28 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Asignación de los bytes de estado (modo directo)
SCONByte 1
B7OPM2
B6OPM1
B5FCT
B424VL
B3FAULT
B2WARN
B1READY
B0ENABLED
Modo de
funcionamiento 1/2
Mando del
equipo FCT
Tensión
de carga
Error Adverten
cia
Funciona
miento
habilitado
Accionam
iento ha
bilitado
SPOSByte 2
B7REF
B6STILL
B5DEV
B4MOV
B3TEACH
B2MC
B1ACK
B0LIFE
Accionam
iento
referen
ciado
Adverten
cia de
reposo
Error de
seguimien
to
El accio
namiento
se mueve
Confirma
ción de
teach-in
Motion
Complete
Confirma
ción de
inicio
Bit de
vida
SDIRByte 3
B7–
B6FAST1)
B5XLIM
B4VLIM
B3CONT
B2COM2
B1COM1
B0REL1)
– Parada
rápida
Carrera
crítica al
canzada
Velocidad
crítica al
canzada
Funciona
miento de
segui
miento
Modo de
control 2
Modo de
control 1
Valor
nominal
relativo
Valorefectivo
secundarioByte 4
Depende de la parametrización (PNU 523:03/07):
– Velocidad real en porcentaje del valor básico (PNU 600 o 540)
– Número de error actual o número de error/número de advertencia
El valor efectivo secundario de la velocidad está provisto de signo, por tanto, pueden vis
ualizarse valores positivos y negativos. Se aprovecha el margen de valores completo, es decir,
la velocidad indicada se encuentra dentro de un margen comprendido entre -128 % y +127 %.
Las velocidades mayores se limitan a -128 % o +127 %.
Valorefectivo
principalBytes
5...8
Depende de la parametrización (PNU 523:04/08):
– Posición real en el sistema de medida fijado � Apéndice B.1
– Fuerza real en el sistema de medida fijado � Apéndice B.1
– Combinación fuerza real y posición real con escalado adaptado � Sección 2.2.7
1) Los bits de estado REL y FAST solo cambian al recibir la orden de posicionamiento (flanco de inicio), los demás bits de estado del
SDIR se actualizan dinámicamente.

2 Datos I/O y control secuencial
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 29
Byte de control 2 (CPOS) – Modo directoBit ES EN Descripción
B0–
– – Reservado, debe ser 0.
Si hay una señal 1 se genera una advertencia.
B1START
Iniciar orden
de posiciona
miento
StartMovement
Command
Mediante un flanco ascendente se aceptan los valores
nominales actuales y se inicia una orden de
posicionamiento.
B2HOM
Iniciar recor
rido de
referencia
Start Homing Con un flanco ascendente se inicia el recorrido de
referencia con los parámetros ajustados, el
referenciado se pone a cero.
Con un sistema de medición absoluto se comunica un
error.
B3JOGP
Actuación
secuencial
positiva
Jog Positive El accionamiento se mueve a la velocidad especificada
en el sentido de valores efectivos mayores, mientras
este bit esté activo.
B4JOGN
Actuación
secuencial
negativa
Jog Negative El accionamiento se mueve a la velocidad especificada
en el sentido de valores efectivos menores mientras el
bit esté activo.
B5TEACH
Programar
valor por
teach-in
Teach Value Reservado (en modo directo).
Si hay una señal 1 se comunica un error.
B6–
– – Reservado, debe ser 0.
Si hay una señal 1 se genera una advertencia.
B7–
– – Reservado, debe ser 0.
Si hay una señal 1 se genera una advertencia.
El byte de control 2 (CPOS) controla las secuencias de posicionamiento en cuanto se desbloquea el
accionamiento.

2 Datos I/O y control secuencial
30 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Byte de control 3 (CDIR) – Modo directoBit ES EN Descripción
B0REL
Valor nominal
relativo
Set-point
Relative
= 0: El valor nominal es absoluto (con control de
posición relativo al punto cero del proyecto)
= 1: El valor nominal es relativo al último valor
nominal/real1)
B1COM1
Modo de
control 1
Control Mode 1 = 0: Control de posición
= 1: Regulación de fuerza
B2COM2
Modo de
control 2
Control Mode 2 Solo con regulación de posición (COM1=0):
= 0: Perfil libre: Ajuste libre de la velocidad y la
aceleración
= 1: Perfil automático: El controlador predetermina la
velocidad y las aceleraciones2)
Si hay una señal 1 en el modo de control Regulación de
fuerza, se comunica un error.
B3CONT
Funcionamien
to de segui
miento
Tracking Mode Con control de posición: Activa el modo de seguimiento
(especificación continua del valor nominal, Continuous
mode):
= 0: No activar el funcionamiento de seguimiento
= 1: Activar el funcionamiento de seguimiento
B4VLIM
Desactivar
control de la
velocidad
Deactivate
velocity
monitoring
Con regulación de fuerza:
= 0: Activar control de velocidad crítica
(Velocity Limit)
= 1: Desactivar control de velocidad crítica
B5XLIM
Desactivar
control de
carrera
Deactivate
stroke
monitoring
Con regulación de fuerza:
= 0: Activar control de carrera crítica (X-Limit)
= 1: Desactivar control de carrera crítica
B6FAST
Parada rápida Fast Stop Regulación para activar MC al alcanzar el valor objetivo
(categoría de calidad � Sección 3.1.6)3)
= 0: Parada precisa
= 1: Parada rápida
B7–
– – Reservado, debe ser 0.
Si hay una señal 1 se genera una advertencia.
1) Control de posición: El valor nominal es relativo al último valor nominal (con MC) o al valor efectivo (si MC no está activado).
Regulación de fuerza � Sección 3.1.2.
2) El controlador selecciona la velocidad y las aceleraciones conforme a la identificación, de manera que la posición de destino se
alcance lo más rápido posible y sin imprecisiones de posicionamiento.
3) SPOS.MC se activa solo cuando la orden de posicionamiento ha finalizado conforme a la regulación seleccionada. En el caso de la
parada rápida se desactiva la supervisión de reposo.
El byte de control 3 (CDIR) es un byte de control especial para el modo de funcionamiento Modo
directo.
2 Datos I/O y control secuencial
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 31
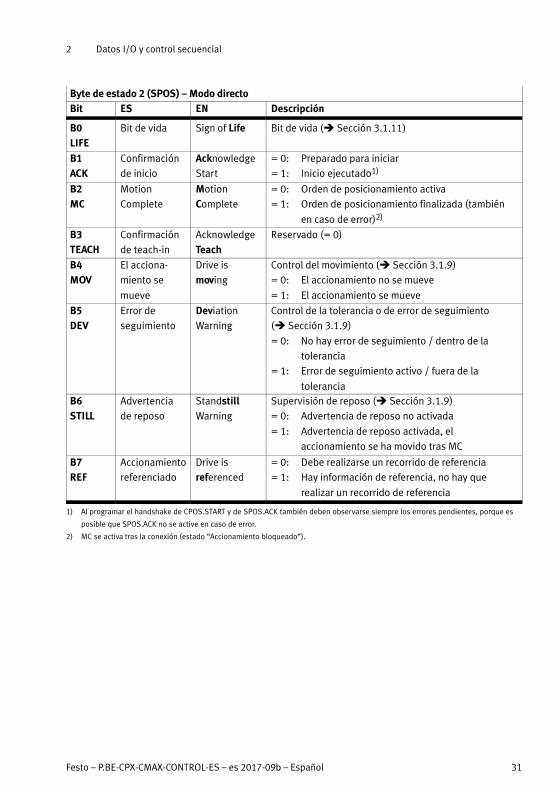
Byte de estado 2 (SPOS) – Modo directoBit ES EN Descripción
B0LIFE
Bit de vida Sign of Life Bit de vida (� Sección 3.1.11)
B1ACK
Confirmación
de inicio
Acknowledge
Start
= 0: Preparado para iniciar
= 1: Inicio ejecutado1)
B2MC
Motion
Complete
Motion
Complete
= 0: Orden de posicionamiento activa
= 1: Orden de posicionamiento finalizada (también
en caso de error)2)
B3TEACH
Confirmación
de teach-in
Acknowledge
TeachReservado (= 0)
B4MOV
El acciona
miento se
mueve
Drive is
moving
Control del movimiento (� Sección 3.1.9)
= 0: El accionamiento no se mueve
= 1: El accionamiento se mueve
B5DEV
Error de
seguimiento
Deviation
Warning
Control de la tolerancia o de error de seguimiento
(� Sección 3.1.9)
= 0: No hay error de seguimiento / dentro de la
tolerancia
= 1: Error de seguimiento activo / fuera de la
toleranciaB6STILL
Advertencia
de reposo
StandstillWarning
Supervisión de reposo (� Sección 3.1.9)
= 0: Advertencia de reposo no activada
= 1: Advertencia de reposo activada, el
accionamiento se ha movido tras MC
B7REF
Accionamiento
referenciado
Drive is
referenced
= 0: Debe realizarse un recorrido de referencia
= 1: Hay información de referencia, no hay que
realizar un recorrido de referencia
1) Al programar el handshake de CPOS.START y de SPOS.ACK también deben observarse siempre los errores pendientes, porque es
posible que SPOS.ACK no se active en caso de error.
2) MC se activa tras la conexión (estado “Accionamiento bloqueado”).

2 Datos I/O y control secuencial
32 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Byte de estado 3 (SDIR) – Modo directoBit ES EN Descripción
B0REL
Relativo Relative = 0: El valor nominal es absoluto
= 1: El valor nominal es relativo al último valor
nominal
B1COM1
Modo de
control 1
Control Mode 1 Acuse de recibo modo de control:
= 0: Control de posición activo
= 1: Regulación de fuerza activa
B2COM2
Modo de
control 1
Control Mode 2 Acuse de recibo modo de control, solo en control de
posición (COM1=0):
= 0: Perfil libre
= 1: Perfil automático
B3CONT
Funcionamien
to de segui
miento
Tracking mode Acuse de recibo del modo de seguimiento (es
pecificación continua del valor nominal, Continuous
mode):
= 0: Modo de seguimiento inactivo
= 1: Modo de seguimiento activo
B4VLIM
Velocidad
crítica
alcanzada
Critical
velocity
reached
(V-Limit)
Solo en la regulación de fuerza:
= 0: Velocidad crítica no alcanzada
= 1: Velocidad crítica alcanzada, se comunica un
error
B5XLIM
Carrera crítica
alcanzada
Critical stroke
reached
(X-Limit)
Solo en la regulación de fuerza:
= 0: Carrera crítica no alcanzada
= 1: Carrera crítica alcanzada, se comunica un error
B6FAST
Parada rápida Fast stop = 0: Parada precisa activa
= 1: Parada rápida activa, se comunica un error
B7–
– – Reservado (= 0)
El byte de estado SDIR es el acuse de recibo de la orden de posicionamiento en el modo directo.
Los bits de estado REL y FAST solo cambian al recibir la orden de posicionamiento (flanco de inicio), los
demás bits de estado del SDIR se actualizan dinámicamente.

2 Datos I/O y control secuencial
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 33
2.2.5 Datos I/O en el modo Puesta a punto
Datos I/O: Puesta a puntoDatos Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Datos O CCON CPOS Función Parámetro 1
Parámetro 2(p. ej. carga útil actual)
Datos I SCON SPOS Función Valorefectivosecundario
Valor efectivo principal (posición real, fuerza real)
Asignación de los bytes de control y de estado (puesta a punto):
Asignación de los bytes de control (puesta a punto)
CCONByte 1
B7OPM2
B6OPM1
B5LOCK
B4–
B3RESET
B2BRAKE
B1STOP
B0ENABLE
Modo defuncionamiento 1/2
BloquearaccesoFCT
– Confirmarerror
Soltarfreno
Parada Habilitaraccionamiento
CPOSByte 2
B7–
B6–
B5TEACH
B4JOGN
B3JOGP
B2HOM
B1START
B0–
– – Programarvalor porteach-in
Actuaciónsecuencialnegativa
Actuaciónsecuencialpositiva
Iniciarrecorridodereferencia
Iniciar orden deposicionamiento
–
Funciónbyte 3
El número de función selecciona la función de la puesta a punto que debe iniciarse dentro delmodo Puesta a punto. Las funciones se ejecutan con un flanco ascendente en CPOS.START.
Valor Función Descripción Parám. 1 Parám. 2
0 Reservado No admisible – –
1 Identificación Ejecutar recorrido deidentificación
= 0 Carga útil
2 Prueba demovimiento
Ejecutar prueba de movimiento = 0 = 0
3 ... 255 Reservado No admisible – –
Al ejecutar funciones reservadas, el CMAX comunica un error correspondiente.
Parámetro 1Byte 4
Al ejecutar una función de la puesta a punto: Reservado = 0.Al programar por teach-in: Destino teach-in � Sección 3.2.6En los bytes de valores nominales no utilizados debe transmitirse un cero (=0).
Parámetro 2Bytes5...8
Solo en la función de la puesta a punto “Identificación”: Carga útil actual en el sistema demedida fijado (� Apéndice B.1).En los bytes de valores nominales no utilizados debe transmitirse un cero (=0).

2 Datos I/O y control secuencial
34 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Asignación de los bytes de estado (puesta a punto)
SCONByte 1
B7OPM2
B6OPM1
B5FCT
B424VL
B3FAULT
B2WARN
B1READY
B0ENABLED
Modo de
funcionamiento 1/2
Mando del
equipo FCT
Tensión
de carga
Error Adverten
cia
Funciona
miento
habilitado
Accionam
iento ha
bilitado
SPOSByte 2
B7REF
B6STILL
B5DEV
B4MOV
B3TEACH
B2MC
B1ACK
B0LIFE
Accionam
iento
referen
ciado
Adverten
cia de
reposo
Error de
seguimien
to
El ac
ciona
miento se
mueve
Confir
mación de
teach-in
Motion
Complete
Confir
mación de
inicio
Bit de
vida
FunciónByte 3
Depende de la parametrización (PNU 523:03/07):
– Acuse de recibo de la función actual de la puesta a punto.
– Si el valor efectivo secundario está configurado como número de error: Indicador de
progreso o destino teach-in. En este caso no hay acuse de recibo de la función de la
puesta a punto.
Valorefectivo
secundarioByte 4
Depende de la parametrización (PNU 523:03/07):
– Indicador de progreso o destino teach-in
Al ejecutar una función de la puesta a punto: En procesos largos, el indicador de
progreso de los datos de estado indica el progreso de la función.
Indicación en porcentaje (0 % a 100 %). En el indicador de progreso pueden
producirse saltos (p.ej., del 24 % al 60 %). Al interrumpir la función, el indicador de
progreso se ajusta a 255 (0XFF).
Al programar por teach-in: Destino teach-in � Sección 3.2.6.
– Número de error actual o número de error/número de advertencia
Valorefectivo
principalBytes
5...8
Depende de la parametrización (PNU 523:04/08):
– Posición real en el sistema de medida fijado � Apéndice B.1
– Fuerza real en el sistema de medida fijado � Apéndice B.1
– Combinación fuerza real y posición real con escalado adaptado � Sección 2.2.7

2 Datos I/O y control secuencial
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 35
Byte de control 2 (CPOS) – Puesta a puntoBit ES EN Descripción
B0–
– – Reservado, debe ser 0.
Si hay una señal 1 se genera una advertencia.
B1START
Iniciar orden
de posiciona
miento
StartMovement
Command
Mediante un flanco ascendente se aceptan los valores
nominales actuales y se inicia una orden de
posicionamiento.
B2HOM
Iniciar
recorrido de
referencia
Start Homing Con un flanco ascendente se inicia el recorrido de
referencia con los parámetros ajustados, el
referenciado se pone a cero.
Con un sistema de medición absoluto se comunica un
error.
B3JOGP
Actuación
secuencial
positiva
Jog Positive El accionamiento se mueve a la velocidad especificada
en el sentido de valores efectivos mayores, mientras
este bit esté activo.
B4JOGN
Actuación
secuencial
negativa
Jog Negative El accionamiento se mueve a la velocidad especificada
en el sentido de valores efectivos menores mientras el
bit esté activo.
B5TEACH
Programar
valor por
teach-in
Teach Actual
Value
Con un flanco descendente se acepta el valor efectivo
actual conforme a la función teach-in (destino teach-in
en parámetro 1 � Sección 3.2.6).
Con un flanco ascendente: Preparar programación
teach-in (aceptar destino teach-in).
B6–
– – Reservado, debe ser 0.
Si hay una señal 1 se genera una advertencia.
B7–
– – Reservado, debe ser 0.
Si hay una señal 1 se genera una advertencia.
El byte de control 2 (CPOS) controla las órdenes de posicionamiento en cuanto se habilita el
accionamiento.

2 Datos I/O y control secuencial
36 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Byte de estado 2 (SPOS) – Puesta a puntoBit ES EN Descripción
B0LIFE
Bit de vida Sign of Life Bit de vida (� Sección 3.1.11)
B1ACK
Confirmación
de inicio
Acknowledge
Start
= 0: Preparado para iniciar
= 1: Inicio ejecutado1)
B2MC
Motion
Complete
Motion
Complete
= 0: Orden de posicionamiento activa
= 1: Orden de posicionamiento finalizada (también
en caso de error)2)
B3TEACH
Confirmación
de teach-in
Acknowledge
Teach= 0: Teach-in ejecutado, valor efectivo aceptado
= 1: Preparado para Teach-in
B4MOV
El acciona
miento se
mueve
Drive is
moving
Control del movimiento (� Sección 3.1.9)
= 0: El accionamiento no se mueve
= 1: El accionamiento se mueve
B5DEV
Error de
seguimiento
Deviation
Warning
Control de la tolerancia o de error de seguimiento
(� Sección 3.1.9)
= 0: No hay error de seguimiento / dentro de la
tolerancia
= 1: Error de seguimiento activo / fuera de la
toleranciaB6STILL
Advertencia
de reposo
StandstillWarning
Supervisión de reposo (� Sección 3.1.9)
= 0: Advertencia de reposo no activada
= 1: Advertencia de reposo activada, el
accionamiento se ha movido
B7REF
Accionamien
to referen
ciado
Drive is
referenced
= 0: Debe realizarse un recorrido de referencia
= 1: Hay información de referencia, no hay que
realizar un recorrido de referencia
1) Al programar el handshake de CPOS.START y de SPOS.ACK también deben observarse siempre los errores pendientes, porque es
posible que SPOS.ACK no se active en caso de error.
2) MC se activa tras la conexión (estado “Accionamiento bloqueado”).
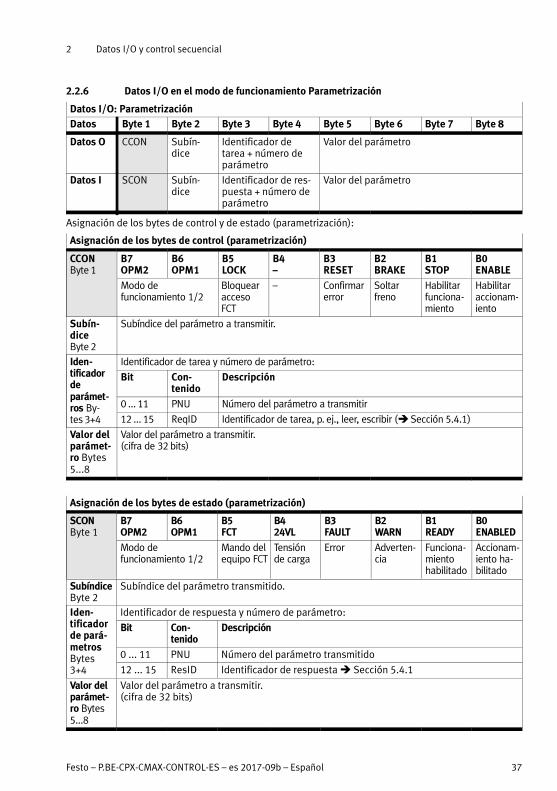
2 Datos I/O y control secuencial
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 37
2.2.6 Datos I/O en el modo de funcionamiento Parametrización
Datos I/O: ParametrizaciónDatos Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Datos O CCON Subíndice
Identificador detarea + número deparámetro
Valor del parámetro
Datos I SCON Subíndice
Identificador de respuesta + número deparámetro
Valor del parámetro
Asignación de los bytes de control y de estado (parametrización):
Asignación de los bytes de control (parametrización)
CCONByte 1
B7OPM2
B6OPM1
B5LOCK
B4–
B3RESET
B2BRAKE
B1STOP
B0ENABLE
Modo defuncionamiento 1/2
BloquearaccesoFCT
– Confirmarerror
Soltarfreno
Habilitarfuncionamiento
Habilitaraccionamiento
SubíndiceByte 2
Subíndice del parámetro a transmitir.
Identificadordeparámetros Bytes 3+4
Identificador de tarea y número de parámetro:
Bit Contenido
Descripción
0 ... 11 PNU Número del parámetro a transmitir
12 ... 15 ReqID Identificador de tarea, p. ej., leer, escribir (� Sección 5.4.1)
Valor delparámetro Bytes5...8
Valor del parámetro a transmitir.(cifra de 32 bits)
Asignación de los bytes de estado (parametrización)
SCONByte 1
B7OPM2
B6OPM1
B5FCT
B424VL
B3FAULT
B2WARN
B1READY
B0ENABLED
Modo defuncionamiento 1/2
Mando delequipo FCT
Tensiónde carga
Error Advertencia
Funcionamientohabilitado
Accionamiento habilitado
SubíndiceByte 2
Subíndice del parámetro transmitido.
Identificadorde parámetrosBytes3+4
Identificador de respuesta y número de parámetro:
Bit Contenido
Descripción
0 ... 11 PNU Número del parámetro transmitido
12 ... 15 ResID Identificador de respuesta � Sección 5.4.1
Valor delparámetro Bytes5...8
Valor del parámetro a transmitir.(cifra de 32 bits)

2 Datos I/O y control secuencial
38 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
2.2.7 Valores efectivos y valores nominales principales
Valores de 32 bits (4 bytes)– Valores nominales: PNU 523:02 = PNU 523:06 = 0
Dependiendo del modo de regulación debe transmitirse una posición nominal o una fuerza nominal
al CMAX. Los datos se indican en el sistema de usuario ajustado.
– Valores efectivos: PNU 523:04 = PNU 523:08 = 0 o 1
Para cada modo de regulación se define si se transmite una posición efectiva o una fuerza efectiva.
De serie se transmite en ambos modos la posición efectiva. Los datos se indican en el sistema de
usuario ajustado.
Se recomienda transmitir siempre los mismos valores para el control de posición y de fuerza con el
fin de simplificar la evaluación en el sistema de mando.
Datos Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Datos O CCON CPOS Número de
frase
Reservado Reservado
CDIR Valor nominal
secundario
Valor nominal principal
Función Parámetro 1 Parámetro 2
Datos I SCON SPOS Número de
frase
Valor efectivo
secundario
Valor efectivo principal
SDIR
Función
Valores de 16 bits (2 bytes)Si se necesitan valores de posición y de fuerza, pueden transmitirse al mismo tiempo con 16 bits. Esto
puede configurarse para valores nominales y para valores efectivos. La transmisión como valor de 16
bits disminuye la resolución y el margen de valores de los valores de posición y de fuerza.
– Valores nominales: PNU 523:02 = PNU 523:06 = 1
– Valores efectivos: PNU 523:04 = PNU 523:08 = 3
Datos Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Datos O CCON CPOS Número de
frase
Reservado Reservado
CDIR Valor nominal
secundario
Posición nomi
nal
Fuerza nominal
Función Parámetro 1 Parámetro 2
Datos I SCON SPOS Número de
frase
Valor efectivo
secundario
Posición efec
tiva
Fuerza efectiva
SDIR
Función

2 Datos I/O y control secuencial
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 39
Posición de los valores de 16 bits en el valor efectivo principal– 523:4 = 523:8 = 3: No depende del parámetro del sistema CPX “Representación análoga de valor
de proceso”
– 523:4 = 523:8 = 2: Depende del parámetro del sistema CPX “Representación análoga de valor de
proceso”
PNU 523.4/8 Parámetro del sistema CPX“Representación análoga de valor de
proceso”
Asignación de bytes
Posición efectiva Fuerza efectiva
3 Intel o Motorola Bytes 5 + 6 Bytes 7 + 8
2 Intel Bytes 5 + 6 Bytes 7 + 8
2 Motorola Bytes 7 + 8 Bytes 5 + 6
Con el valor 3 siempre hay datos I/O inequívocos independientemente del modo de regulación.
Se admite el valor 2 para el valor efectivo principal (posición efectiva y fuerza efectiva) solo por motivos
de compatibilidad. Se recomienda no utilizar más esta variante.
Escala
Los valores nominales y efectivos se transmiten como valores de 32 o de 16 bits. Los valores de 32 bis
se escalan como los demás parámetros. El margen de valores limitado de los valores de 16 bits re
quiere en parte una adaptación de la escala.
Las siguientes tablas incluyen la escala y los márgenes de valores resultantes.
Sistema de medición: métrico (actuadores lineales)
En los valores de fuerza se adapta la escala en caso de diámetros de cilindro grandes para garantizar
un margen de valores suficiente.
Señal Tamaño depalabra
Øeff1) Escala Margen de valores
Posición 32 bits Todos 0,01 mm -21.474.836,48 ... 21.474.836,47 mm
16 bits Todos 0,1 mm -3.276,8 ... +3.276,7 mm
Fuerza 32 bits Todos 1 N -2147483648 ... 2.147.483.647 N
16 bits ≤ 160 mm 1 N -32.768 ... +32.767 N
16 bits > 160 mm 10 N -327.680 ... +327.670 N
1) Øeff es el diámetro del cilindro efectivo. Para ejes dobles se aplica: Øeff = √2 × diámetro de cilindro configurado.
Tab. 2.3 Escala valores nominales y efectivos, sistema de medición SI, actuadores lineales

2 Datos I/O y control secuencial
40 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Sistema de medición: imperial (actuadores lineales)Conversión SI - US: 1 lbf = 4,4482 N, 1 in = 25,4 mm
Señal Tamaño depalabra
Escala Margen de valores
Posición 32 bits 0,001 in -2.147.483,648 ... 2.147.483,647 in
16 bits 0,01 in -327,68 ... +327,67 in
Fuerza 32 bits 1 lbf -2.147.483,648 ... 2.147.483.647 lbf
16 bits 1 lbf -32.768 ... +32.767 lbf
Tab. 2.4 Escala valores nominales y efectivos, sistema de medición imperial, actuadores lineales
Sistema de medición: métrico/imperial (actuadores giratorios)
No es compatible la regulación del momento de giro. Por eso no tiene ninguna utilidad una representa
ción de 16 bits.
Señal Tamaño depalabra
Escala Margen de valores
Posición 32 bits 0,1 ° -214.748.364,8 ... 214.748.364,7 °
Tab. 2.5 Escala valores nominales y efectivos, actuadores giratorios

2 Datos I/O y control secuencial
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 41
2.3 Máquina de estado FHPP
T7* siempre tiene lamáxima prioridad.
Desconectado
S1Controlador conectado
S3Accionamiento
habilitado,funcionamiento
bloqueado(parada)
S2Accionamiento
bloqueado
SA1
Listo
SA5Actuaciónsecuencial
positiva
SA6Actuaciónsecuencialnegativa
SA4Se ejecuta elrecorrido dereferencia
SA2Orden de
posicionamientoactiva
S5 Reacción
a errores
S6
Error
A partir de cualquierestado
S4Funcionamiento habilitado(Ready)
T6
TA11
TA12
TA9
TA10
TA5a, TA5b
TA7
TA8
TA1TA2
T2T5
T3T4
T1
T7*
T8
T10
T9
S5
T11
Fig. 2.1 máquina de estado
Notas sobre el estado “Funcionamiento habilitado”Las transiciones T4, T6 y T7* se ejecutan desde cualquier subestado SAx y, automáticamente, adoptan
una prioridad superior a la de cualquier transición TAx.
Reacción a erroresT7 (“Error detectado”) tiene la máxima prioridad (y se identifica con un asterisco “*”).

2 Datos I/O y control secuencial
42 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
2.3.1 Establecer disponibilidad para funcionar
T Condiciones internas Actividades del usuario
T1 El accionamiento está conectado.
No se detecta ningún error.
–
T2 Tensión de la carga aplicada.
Control de nivel superior en la unidad de control
de nivel superior.
“Habilitar accionamiento” = 1
CCON = xxx0.xxx1
T3 – “Parada” = 1
CCON = xxx0.xx11
T4 – “Parada” = 0
CCON = xxx0.xx01
T5 – “Habilitar accionamiento” = 0
CCON = xxx0.xxx0
T6 – “Habilitar accionamiento” = 0
CCON = xxx0.xxx0
T7* Error detectado. –
T8 Reacción ante error concluida, accionamiento
detenido
(Motion Complete = 1).
–
T9 Ya no hay más errores (F2). “Confirmar error” = 0 1
CCON = xxx0.Rxxx
T10 Ya no hay más errores (F1). “Confirmar error” = 0 1
CCON = xxx0.Rxx1
T11 Todavía hay un error. “Confirmar error” = 0 1
CCON = xxx0.Rxx1
Leyenda: R = flanco ascendente (Rising edge), F = flanco descendente (Falling edge), x = indiferente
Tab. 2.6 Transiciones para crear la disponibilidad de funcionamiento
Modo de funcionamiento ParametrizaciónEl modo Parametrización no sirve para ejecutar órdenes de posicionamiento, sino únicamente para
transmitir parámetros. La transición T3 no es admisible. En consecuencia, el accionamiento no puede
cambiar al estado S4.
Diagrama de flujo de la programación de la unidad de control de nivel superior
� Apéndice A.4.1.

2 Datos I/O y control secuencial
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 43
2.3.2 Iniciar órdenes de posicionamientoObservación: Adicionalmente se aplica siempre como condición previa CCON = xxx0.xx11.
TA Condiciones internas Actividades del usuario
TA1 Hay un referenciado. Iniciar orden de posicionamiento = 0
1
CPOS = 00x0�00R0
TA2 Motion Complete = 1
La frase actual ha finalizado. La siguiente frase
no se debe procesar automáticamente.
CPOS = 00xx�xxx0
TA5a Modo de frase:
La frase actual ha finalizado. La siguiente frase
se debe procesar automáticamente.
CPOS = 00xx�xxx0
No es necesario iniciar.
TA5b Modo de frase o modo directo. CPOS = 00xx�xxR0
TA7 Recorrido (solo con sistema de medición de
recorrido incremental).
Iniciar recorrido de referencia = 0 1
CPOS = 00x0�0Rx0
TA8 Ha finalizado el referenciado. –
TA9 – Jog positivo = 0 1
CPOS = 00x0�Rxx0
TA10 – Jog positivo = 1 0
CPOS = 00xx�Fxx0
TA11 – Jog negativo = 0 1
CPOS = 00xR�xxx0
TA12 – Jog negativo = 1 0
CPOS = 00xF�xxx0
Leyenda: R = flanco ascendente (Rising edge), F = flanco descendente (Falling edge), x = indiferente
TA3, TA4 y TA6 reservadas para futuras ampliaciones.
Tab. 2.7 Transiciones al iniciar órdenes de posicionamiento
Diagrama de flujo de la programación de la unidad de control de nivel superior
� Apéndice A.4.2.

3 Funciones del accionamiento
44 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
3 Funciones del accionamiento
3.1 Descripción general del funcionamiento
3.1.1 Control de posición
Los fundamentos para la regulación de los ejes neumáticos los marca un modelo de tramo de
regulación guardado en el CMAX. Este modelo se basa en un eje neumático diseñado conforme a las
normas referentes a, p. ej.:
– aire comprimido preparado
– combinación utilizada de válvula-cilindro
– carga de masa admisible
– dimensiones y longitudes de tubos flexibles, etc.
Los parámetros básicos de este tramo de regulación son:
– los datos de eje y de la aplicación
– los datos internos determinados en la identificación (� 3.2.3) y en la adaptación (� 3.2.4)
Características generales
Por lo general, en el control de posición es válido lo siguiente:
– Los valores nominales se filtran (filtro paso bajo) para “limar” modificaciones abruptas.
– Supervisión de errores de seguimiento (señal generada cuando el error de seguimiento es mayor
que el margen de control).
– Control de las posiciones finales por software (limitación a posición final y mensaje de error).
Órdenes relativas � Sección 3.1.3.
Comportamiento en caso de parada � Sección 3.1.4.

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 45
Perfil automático – Modo de valor parcial (punto a punto)En el perfil automático, una orden de posicionamiento se ejecuta con la velocidad, aceleración y
deceleración máximas determinadas en la identificación.
� Fig. 3.1 muestra un perfil de movimiento típico, dependiente del cilindro (longitud, diámetro), carga
y datos de identificación determinados.
Condición previa: Se ha ejecutado la identificación dinámica. Si no es así, la orden de posicionamiento
se ejecuta con los valores predeterminados del perfil libre y se emite un mensaje de advertencia.
Características:
– Tipo más rápido y sencillo de posicionamiento punto a punto
– Sin especificación de valores de aceleración o deceleración
– La carga útil se puede ajustar por separado para cada orden de posicionamiento.
– Permite la conmutación flotante a una orden de posicionamiento con perfil libre.
Fig. 3.1 Desarrollo de aceleración nominal, velocidad nominal y posición nominal con el perfil
automático

3 Funciones del accionamiento
46 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Perfil libre – Modo de valor parcial (punto a punto)En el perfil libre, una orden de posicionamiento se ejecuta con la velocidad, aceleración y deceleración
indicadas. Si es necesario, se limitan los valores determinados en la identificación.
� Fig. 3.2 muestra un perfil de movimiento típico.
Características:
– La velocidad, la aceleración, la deceleración y la carga útil pueden ajustarse por separado para cada
orden.
– Limitación automática de la aceleración a valores factibles si se ha efectuado la identificación
dinámica. La limitación automática no se puede desconectar.
– Si no se ha ejecutado una identificación dinámica: Puede darse una gran desviación de regulación a
causa de valores nominales no alcanzables. Los valores óptimos de aceleración y deceleración
deben ser definidos por el usuario.
– Conmutación flotante opcional a una nueva orden de posición.
Fig. 3.2 Desarrollo de aceleración nominal, velocidad nominal y posición nominal en el perfil
automático

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 47
Fase Fórmula de cálculo Descripción
Fase de
aceleraciónt1 �
va1
v= Velocidad programada
a1 = Aceleración para rampa de aceleración
a2 = Aceleración para rampa de deceleración
t1 = Tiempo de arranque
t2 = Tiempo de deceleración
t3 = Tiempo con velocidad constante
s1 = Tramo de arranque
s2 = Tramo de deceleración
s3 = Tramo con velocidad constante
sges = Tramo total
s1 �a12� t2
1
Fase de
deceleraciónt2 �
va2
s2 �
a22� t2
2
Movimiento ho
mogéneos3 � sges-(s1 � s2)
t3 �
s3v
Tab. 3.1 Calculo de las fases en el perfil libre
Modo continuoPara la especificación continua de los valores de referencia se sigue un valor nominal de posición
predeterminado desde el exterior. La unidad de control de nivel superior predetermina los valores
nominales. Solo es posible realizar la especificación continua de los valores de referencia (� 3.4.2) en
el modo directo y esencialmente corresponde a la del perfil libre.
Características:
– La velocidad, la aceleración y la deceleración se limitan a los valores predeterminados por el
usuario (no hay limitación automática).
– La carga útil puede ajustarse al inicio del modo continuo de posicionamiento.

3 Funciones del accionamiento
48 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
3.1.2 Regulación de fuerzaLa regulación de fuerza del cilindro se realiza a través de la regulación del esfuerzo de compresión
ejercido en el émbolo en las dos cámaras del cilindro. No se regula directamente, para ello sería
necesario un sensor de fuerza en la pieza a mecanizar. Por tanto, la imprecisión de la fuerza regulada
queda dentro del margen de la fuerza de rozamiento estático del accionamiento. Los valores objetivo
se predeterminan como fuerza en el sistema de medida utilizado. A través de la fuerza nominal, la
posición de montaje, las cargas básica y útil y los diámetros del émbolo y el vástago se determina la
fuerza que debe regularse en el émbolo. El regulador de fuerza se parametriza automáticamente en
función de los datos de proyecto ajustados. En casos aislados se pueden optimizar los parámetros de
regulación � Apéndice B.5.3.
Características principales:
– Los valores objetivo y la tolerancia se introducen como fuerzas.
– Los valores de fuerza tienen un signo (positivo o negativo).
El signo del valor nominal de fuerza determina la dirección de la regulación de fuerza:
“+” significa que la fuerza se acumula en dirección a valores de posición crecientes
“–” significa que la fuerza se acumula en dirección a valores de posición decrecientes
– Control de las posiciones finales por software y limitaciones de fuerza.
– Rampa de fuerza nominal ajustable (incremento de fuerza por unidad de tiempo).
– Supervisión de carrera y de velocidad durante la regulación de fuerza.
– Recorrido a velocidad reducida cuando falta la fuerza antagónica.
– Si la carga total está especificada correctamente y la posición de montaje está configurada
correctamente la fuerza objetivo y la fuerza real describen la fuerza efectiva en la pieza, véase
también “Influencia de la carga total en la regulación de fuerza”.
– Las fuerzas de rozamiento en el sistema de accionamiento (cilindro y guía) no se tienen en cuenta.
– En el modo de fuerza no se admite un seguimiento continuo del valor nominal.
Desarrollo de la regulación de fuerzaSi con un flanco ascendente en CPOS.START en el modo de frase o modo directo está ajustado el modo
de control “Regulación de fuerza”, el CMAX interpreta la especificación de valor objetivo como valor de
fuerza. Éste activa la regulación de fuerza y regula el valor hasta el máximo con la rampa ajustada.
La regulación de fuerza tiene lugar, dependiendo de la situación presente, en distintas fases � Fig. 3.3.

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 49
Velocidad real
vred
F
Velocidad reducida
Tiempo
1 2 3 4
Fuerza real
1 Inicio – Acumulación de fuerza con rampa de fuerza nominal2 Desplazamiento a velocidad reducida vred3 Después de incidir en la pieza nueva acumulación de fuerza con rampa de fuerza nominal4 Fuerza objetivo alcanzada
Fig. 3.3 Fases de la regulación de fuerza, representación esquemática
1. Con el flanco ascendente en CPOS.START se activa la orden de fuerza. La señal MC salta a “0”,
empieza la acumulación de fuerza con la rampa de fuerza parametrizada (fase 1 ).
2. Sin la fuerza antagónica suficiente, la velocidad real del eje sobrepasa el valor de la velocidad
reducida vred, el CMAX cambia automáticamente al control de posición y el eje continúa
desplazándose regulado por la posición a la velocidad reducida. El eje se encuentra en la fase 2,
un recorrido de posicionamiento a velocidad reducida vred.
3. Al alcanzar la pieza o los topes finales vuelve a aumentar la fuerza antagónica. El CMAX lo detecta
(p. ej. el estado de reposo), vuelve a cambiar automáticamente a la regulación de fuerza y continúa
la acumulación de fuerza con la rampa de fuerza. La fase 3 se ejecutará.
4. Si la fuerza real alcanza la fuerza objetivo dentro de la tolerancia parametrizada, se activa el MC y la
orden de fuerza ha finalizado.
El eje continúa presionando con la fuerza objetivo contra la pieza (fase 4 ). Permanece en la
regulación de fuerza hasta que se inicia una orden de posicionamiento o se ejecuta una parada
(� 3.1.4).

3 Funciones del accionamiento
50 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Otras características y notas:
– La rampa de fuerza nominal parametrizada es el valor medio de una rampa “limada” en realidad en
forma de sin². Por ello la pendiente de esta rampa es el doble de grande que el valor medio
predeterminado.
– El valor de la velocidad reducida vred se determina con los siguientes parámetros.
– Datos de aplicación --> Valores predeterminados para regulación de fuerza --> Velocidad vred
(PNU 601)
– Tabla de frases --> Orden de posicionamiento --> Velocidad vred (PNU 406)
– Modo directo --> Regulación de fuerza --> Velocidad vred (PNU 554)
– La duración de la fase 2 (� Fig. 3.3) depende de la distancia que debe recorrer el accionamiento
tras el arranque antes de chocar con una fuerza antagónica suficiente.
– Si el accionamiento choca con una fuerza antagónica suficiente inmediatamente después del inicio
de una orden de fuerza y no tiene lugar una conmutación al control de posición, no hay ningún
recorrido con velocidad reducida.
– El cambio al control de posición 2 se puede anular (desactivar) específicamente cuando el valor de
la velocidad reducida se ajusta a “0”. En este caso la acumulación de fuerza aumenta
continuamente con la rampa de fuerza nominal hasta alcanzar la fuerza objetivo. Este es la mejor
manera de obtener una acumulación de fuerza rápida y controlada, p. ej. al introducir piezas a
presión. La condición previa es que el accionamiento se haya posicionado antes de la orden de
fuerza hasta inmediatamente antes de la pieza a apretar, es decir, se encuentre detenido < 1 mm
antes de la posición de introducción/apriete a presión.
– El comportamiento de parada del accionamiento desde la regulación de fuerza se describe en
� Sección 3.1.4.
– Al volver a cambiar de regulación de fuerza a control de posición primero tiene lugar una parada
(posición de destino = posición real) y después un posicionamiento desde el estado de reposo.
– La fuerza nominal puede tener el valor 0 (“sin fuerza”). En caso de montaje horizontal el eje puede
ser desplazado libremente por una fuerza externa solo contra la fricción del sistema. Esto también
es válido en caso de montaje vertical con carga total parametrizada correctamente e identificación
estática ejecutada. La carga total está equilibrada.
– El CMAX también admite órdenes de fuerza relativas (� Sección 3.1.3).
– La regulación de fuerza fuera de las posiciones finales por software no está permitida y produce un
mensaje de error.
– Con la regulación de fuerza puede ser necesario optimizar los datos del regulador
(� Sección B.5.3).
Funciones de supervisión con la regulación de fuerzaSi con la regulación de fuerza activa no se respetan ciertas condiciones límite, p. ej. la pieza esperada
para introducir/apretar a presión no está y se ha desactivado la conmutación al control de posición
(vred = 0), el accionamiento puede alcanzar una velocidad muy elevada y, al hacerlo, desplazarse a la
posición final sin freno. Para evitar tales situaciones, el CMAX dispone de una función de supervisión de
velocidad y de carrera en el modo de regulación de fuerza. Los valores límite –la velocidad crítica y la
carrera crítica– se pueden parametrizar y ambas funciones de supervisión se pueden activar y
desactivar independientemente una de otra. La Fig. 3.4 muestra las relaciones.

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 51
t
t
t
vlim
F
xlim
vred
1
2
3
4 5
1 Velocidad crítica vlim2 Carrera crítica xlim3 Fuerza objetivo F4 Ejemplo de infracción de límite de
supervisión de carrera
5 Ejemplo de infracción de límite desupervisión de velocidad
Fig. 3.4 Función de supervisión con la regulación de fuerza, representación esquemática
Notas sobre los controles de carrera y de velocidad:
– La carrera crítica XLIM se cuenta al iniciar la orden de fuerza desde la posición actual del eje. El
valor siempre es positivo (PNU 510).
Si se excede la carrera crítica se activará RSB.XLIM o SDIR.XLIM (carrera crítica alcanzada). Se
detiene el accionamiento y se activa SPOS.MC en cuanto el accionamiento está parado.
Se genera un mensaje de error y se activa SCON.FAULT.
– La velocidad crítica VLIM es un límite absoluto. El valor siempre es positivo. El valor seleccionado
(PNU 511) debe basarse en la energía de impacto máxima permitida de los topes en las posiciones
finales.
Si se excede la velocidad crítica vlim en más de 12 ms, se activa RSB.VLIM o SDIR.VLIM (velocidad
crítica alcanzada). Se detiene el accionamiento y se activa SPOS.MC en cuanto el accionamiento
está parado.
Se genera un mensaje de error y se activa SCON.FAULT.

3 Funciones del accionamiento
52 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
– Las supervisiones de carrera y de velocidad pueden activarse o desactivarse para cada orden de
posicionamiento de manera independiente entre sí (valor predeterminado: Activada). Los valores
límite son globales, es decir, son válidos para todas las órdenes de posicionamiento.
– La supervisión de carrera y de velocidad se activa cada vez que se inicia una orden de fuerza, si no
se ha bloqueado antes.
– La supervisión de carrera y de velocidad también está activa después del MC hasta el fin de la
regulación de fuerza, es decir, se detectan las infracciones de valores límite retardadas.
– La velocidad crítica vlim siempre tiene que parametrizarse con un valor claramente mayor que el de
la velocidad reducida vred para evitar que la supervisión de velocidad se active demasiado pronto
durante la orden fuerza.
Recomendación: vlim = (2 ... 3) * vred
Influencia de la carga total en movimiento (carga básica + carga útil) en la regulación de fuerzaEn el modo de regulación de fuerza el CMAX tiene en cuenta la gravedad de la carga en movimiento que
actúa sobre el accionamiento. La Fig. 3.5 muestra las magnitudes de referencia de la regulación de
fuerza en un accionamiento. Son válidas las relaciones matemáticas que figuran en la Tab. 3.2. La
fuerza depende de los datos del cilindro y de los valores de presión regulados en ambas cámaras del
cilindro. Además se corrige la fuerza real con la gravedad efectiva (= g * m * sin �).
Fuerza en la regulación de fuerza
F � p1 � A1��-��p2 � A2��-��g � m � sin�P1 Presión en la cámara 1 del cilindro: No hay vástago; en el punto cero del sistema de
medición del recorrido (valores de posición más pequeños, conexión azul)
P2 Presión en la cámara 2 del cilindro; vástago (si lo hay); en el final del sistema de medición
del recorrido (valores de posición mayores, conexión negra)
A1, A2 Ambas superficies del émbolo del cilindro: El CMAX calcula las superficies del émbolo a
partir del tipo y diámetro del cilindro y del diámetro del vástago.
g Aceleración terrestre
m Carga total en movimiento (carga básica + carga útil)
� Ángulo de la posición de montaje del eje
Tab. 3.2 Definición de la fuerza en la regulación de fuerza
La fuerza regulada se obtiene restando la fuerza aplicada en el émbolo a la gravedad de la carga total
en movimiento.
Nota:
La fuerza incidente en el carro o en el vástago –es decir, en la pieza– difiere de la fuerza
real regulada en función de las fuerzas de rozamiento. La fuerza de rozamiento actúa
contra el sentido del movimiento del émbolo. Su valor se suma o resta respectivamente
de la fuerza real.

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 53
0
10
20
30
40
50
60
1 23 4
5
6
7
8
Cámara 1 del cilindro:
1 Presión de la cámara p12 Superficie A del émbolo1Cámara 2 del cilindro:
3 Presión de la cámara p24 Superficie A del émbolo25 Posición de montaje ()
6 Los valores de posición disminuyen, los valores de fuerza disminuyen (signo –)
7 Los valores de posición aumentan, los valores de fuerza aumentan (signo +)
8 Carga total en movimiento
Fig. 3.5 Magnitudes de referencia de la regulación de fuerza
La característica de la consideración de la gravedad puede utilizarse para la compensación de peso. Si
se activa la fuerza objetivo F = 0, al iniciar la orden de fuerza el accionamiento se detiene en la posición
de inicio con compensación de peso, siempre que la carga total y la posición de montaje se hayan
configurado correctamente y se haya ejecutado una identificación estática.

3 Funciones del accionamiento
54 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
3.1.3 Órdenes relativasLas órdenes relativas se admiten en el modo de frase (bit de control RCB1.REL = 1) y en la orden de
posicionamiento en el modo directo (bit de control CDIR.REL = 1, bit de estado SDIR.REL = 1). Con
valor nominal continuo en el modo directo no se permite una orden relativa y se produce el error E41.
Control de posiciónNormalmente es válido lo siguiente: El valor objetivo es relativo al último valor objetivo (con
SPOS.MC=1) o al valor efectivo (con SPOS.MC=0) al iniciar la orden de posicionamiento.
Excepciones:
– En la conmutación progresiva de frases, el valor objetivo relativo se refiere al valor preseleccionado
si la condición tiene el mismo modo de regulación (es decir, en las condiciones posición, carrera,
carrera en función de fuerza, posición en función de fuerza).
– Órdenes de posicionamiento que siguen a órdenes de fuerza: Durante la regulación de fuerza, la
posición de destino se adapta siempre a la posición real. De este modo el valor objetivo relativo se
refiere a la posición real.
– En caso de parada y habilitación se ejecuta una comparación interna objetivo=real. A este valor
objetivo se refiere entonces el valor objetivo relativo.
Regulación de fuerzaNormalmente es válido lo siguiente: El valor objetivo es relativo al último valor objetivo (con
SPOS.MC=1) o al valor efectivo (con SPOS.MC=0) al iniciar la orden de posicionamiento.
Excepciones:
– En la conmutación progresiva de frases, el valor objetivo relativo se refiere al valor preseleccionado
si la condición tiene el mismo modo de regulación (es decir, en las condición fuerza).
– Órdenes de fuerza que siguen a órdenes de posicionamiento: Aquí la fuerza objetivo se pone en 0
en el control de posición, es decir, el valor objetivo relativo se refiere a 0 cuando SPOS.MC = 1.
– Comportamiento tras parada y habilitación: Aquí también se pone la fuerza objetivo en 0, es decir,
el valor objetivo relativo se refiere a 0.
3.1.4 Comportamiento durante parada
Control de posiciónCon el control de posición, el accionamiento se detiene con la rampa de parada parametrizada, la orden
de posicionamiento se interrumpe y se desactiva la supervisión de reposo.
Si la deceleración válida en la orden de posicionamiento actual es mayor que la rampa de parada
parametrizada, la parada se realiza con la deceleración de la orden de posicionamiento actual.
Si no es posible la parada con la rampa de parada o con la deceleración de la orden de posicionamiento
(generalmente solo en el posicionamiento continuo o en la conmutación progresiva de frases) se activa
posición nominal = posición real.
Regulación de fuerzaCon la regulación de fuerza, el accionamiento conmuta primero al control de posición, a continuación
frena con la deceleración máxima (determinada internamente) y entonces activa posición nominal =
posición real.

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 55
3.1.5 Regulación de reposoAl finalizar una orden de posicionamiento (MC) empieza la regulación de reposo.
Se cambia de control de posición a regulación de fuerza para mantener el accionamiento en una
posición de reposo de modo seguro. Para ello se mide la fuerza ejercida en ese momento en el émbolo
y se especifica como valor nominal para la regulación de fuerza.
Al contrario que la regulación de fuerza, la regulación de reposo no se basa en valores calculados
dependientes de los valores de masa configurados, sino en valores de fuerza medidos al final del
procedimiento de posicionamiento. Por lo tanto, las modificaciones de la masa que no se introducen en las
órdenes de posicionamiento no afectan al comportamiento del accionamiento en la posición de reposo.
Debido a procesos de compensación de la presión, la fuerza que se especifica para los valores de
referencia no se mide directamente al alcanzar la condición de reposo, sino:
– 200 ms después o
– cuando la modificación de la fuerza real excede un valor determinado (> 25% de la histéresis de fricción).
La condición de reposo se alcanza si:
– la tolerancia se ha alcanzado una vez
– el error de posición está dentro de un 120% del margen de tolerancia admisible y
– la velocidad es inferior a 4 mm/s.
Si el accionamiento sale del margen de tolerancia de la regulación de reposo durante la misma, p. ej. a
causa de fuerzas externas, el control de posición vuelve a activarse hasta que se alcanza de nuevo la
condición de conmutación para la regulación de reposo.
Atención: Durante el posicionamiento, el accionamiento se para dentro del área de rozamiento de
adherencia y, por tanto, la fuerza de reposo también puede variar dentro del margen del rozamiento de
adherencia. La fuerza indicada en el reposo es diferente en cada carrera.
La regulación de reposo se puede desconectar con PNU 1155 � Sección C.2.13.
En principio la regulación de reposo mejora el comportamiento del accionamiento en
reposo.
Rara veces, p. ej. en caso de fuga o fuerzas externas, puede influir desfavorablemente en
el comportamiento de posicionamiento y por ello se puede desconectar.
3.1.6 Categorías de calidadPara las órdenes de posicionamiento o de fuerza se utilizan categorías de calidad específicas. De este modo
se determinan unas condiciones con las que una orden de posicionamiento se registra como finalizada.
Clase de calidad Descripción
Parada precisa La orden de posicionamiento ha finalizado si el accionamiento se encuentra
dentro de la tolerancia durante todo el tiempo de supervisión (con control de
posición casi parado – control de la velocidad final).
Parada rápida La orden de posicionamiento finaliza en cuanto el accionamiento se encuentra
dentro del margen de tolerancia.
Tab. 3.3 Categorías de calidad
MC (Motion Complete, SPOS.MC) se emite solo cuando la frase o la orden de
posicionamiento finaliza conforme a la categoría de clase � Sección 3.1.8.

3 Funciones del accionamiento
56 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
3.1.7 Tratamiento de la unidad de bloqueo o frenoEn la VPWP existe una salida digital para controlar una unidad de bloqueo o un freno.
No se ha configurado ninguna unidad de bloqueo/freno
En el ajuste de fábrica no hay ninguna unidad de bloqueo configurada (PNU 1143:03 = 0). La salida
digital de la VPWP emite siempre 0 V.
Se ha configurado unidad de bloqueo/frenoSi una unidad de bloqueo está configurada (PNU 1143:03 = 1), dicha unidad se controla
exclusivamente a través del bit de control CCON.BRAKE, es decir, la unidad de bloqueo solo se gobierna
por la unidad de control de nivel superior, el CMAX no conmuta nunca automáticamente la salida de la
VPWP.
NotaPara que el control a través del CMAX funcione correctamente, la unidad de bloqueo o
el freno debe conmutarse obligatoriamente con la lógica siguiente (� Descripción del
sistema CMAX):
– Pin2: 0 V = Unidad de bloqueo/freno cerrado
– Pin2: 24 V = Unidad de bloqueo/freno abierto
Lógica de control de CCON.BRAKEEn el ajuste de fábrica, la lógica de control es Low activo, es decir, la unidad de bloqueo/freno está
cerrada con CCON.BRAKE = 0 – La salida de conexión de la VPWP emite 0 V. La lógica de control se
puede invertir con PNU 522:02 (� Tab. 3.4).
Lógica de control CCON.BRAKE Control VPWP Unidad debloqueo
PNU 522:02 CCON.BRAKE Salida Estado
Low activo:= 0: Unidad de bloqueo/freno activo con
CCON.BRAKE = 0 (valor predeterminado)
= 0 0 V Cerrado
= 1 24 V Abierto
High activo:= 1: Unidad de bloqueo/freno activo con
CCON.BRAKE = 1 (compatible con CMPX)
= 0 24 V Abierto
= 1 0 V Cerrado
Tab. 3.4 Lógica de control de CCON.BRAKE
NotaEl CMAX pone siempre la salida de conexión de la válvula a 0 V inmediatamente al
detectar la orden de activación de la unidad de bloqueo/freno (excepto si el accionam
iento se habilita simultáneamente, véase abajo). Es decir, la unidad de bloqueo/freno
se activa inmediatamente incluso aunque el actuador siga moviéndose o haya creado
una fuerza.
� Comprobar si la unidad de bloqueo/freno permite este estado operativo.

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 57
Comportamiento al conectarComo la unidad de bloqueo/freno está ajustado de serie como Low activo, al conectar están cerrados
(siempre que se active CCON.BRAKE = 1). Si la unidad de bloqueo/freno está configurado como High
activo, permanece cerrado hasta el primer flanco descendente en CCON.BRAKE o hasta la primera
habilitación del accionamiento. De este modo se evita que la unidad de bloqueo/freno se suelte de
manera accidental si, p. ej., todos los datos I/O del control están ajustados a 0 al conectar.
Activación y liberación de la unidad de bloqueo/frenoCuando el accionamiento está bloqueado, la activación y liberación de la unidad de bloqueo/freno se
transmiten directamente a la unidad de bloqueo/freno sin otra reacción del CMAX. Si se activa el
accionamiento con la unidad de bloqueo/freno cerrado, el CMAX pasa a una regulación de fuerza con
fuerza nominal 0 después de la habilitación.
– Para liberar de manera segura la unidad de bloqueo/freno en caso de producirse el error F2
(SCON.FAULT=1, SCON.ENABLED = 0, SCON.READY=0) es necesario desactivar la habilitación
(CCON.ENABLE=0).
– En caso de fallos de comunicación con la válvula o con el sistema de medición es posible que no se
pueda confirmar la unidad de bloqueo/freno. Usualmente se trata de los errores E43, E6x y E8x. Si
el usuario desea poder controlar la unidad de bloqueo/freno también en estas situaciones, debe
hacerlo a través de un canal independiente y no con el CMAX.
Después de abrir la unidad de bloqueo/freno empieza un tiempo de espera de 50 ms, que es el que
necesita la unidad de bloqueo/freno para la apertura mecánica. Durante este tiempo de espera se
mantiene SCON.READY = 0 incluso si se solicita la habilitación del funcionamiento (CCON.STOP=1).
Solo después es posible el inicio � Fig. 3.6.
Si el controlador se encuentra en el estado “Funcionamiento habilitado” (SCON. READY = 1) el cierre de
la unidad de bloqueo/freno tiene el mismo efecto que la desactivación de CCON.STOP. Mediante una
parada se abandona el estado “Funcionamiento habilitado” y se activa SCON. READY = 0. Al alcanzar el
reposo, una regulación de fuerza se activa con la fuerza nominal 0.
No es posible cerrar la unidad de bloqueo/freno y permanecer al mismo tiempo en el estado
“Funcionamiento habilitado”. Si se solicita la habilitación de funcionamiento (CCON.STOP= 1) mientras
la unidad de bloqueo/freno está cerrado,se emite la advertencia W18. Para evitar la advertencia, al
cerrar la unidad de bloqueo/freno debe bloquearse la habilitación de funcionamiento (CCON.STOP = 0)
y al otorgar la habilitación de funcionamiento debe abrirse la unidad de bloqueo/freno.
Con el control de posición la supervisión de reposo está activa.
NotaEl regulador tiene en cuenta la carga útil de la última orden de posicionamiento. Si los
datos de la masa son incorrectos (p. ej., la carga útil ha cambiado) pueden producirse
movimientos de compensación al soltar la unidad de bloqueo/freno.
En caso de ejes verticales con unidad de bloqueo debe tenerse en cuenta que una fluctuación de la
masa de ± 30 % respecto a la carga de masa configurada, a pesar de la compensación automática de
peso, puede provocar un movimiento inesperado al soltar la unidad de bloqueo.
Remedio: Parametrizar la carga útil modificada antes de soltar la unidad de bloqueo/freno.
Si la posición de montaje no es vertical, con la regulación de fuerza no tiene lugar la compensación.
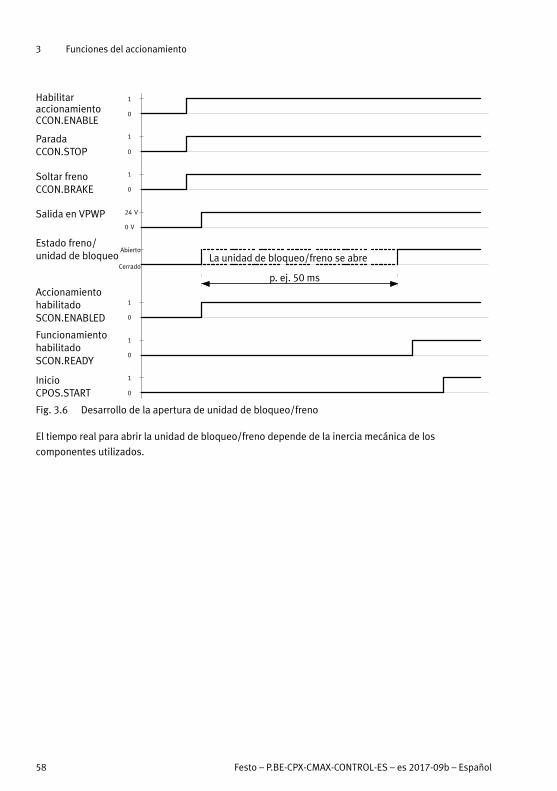
3 Funciones del accionamiento
58 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
HabilitaraccionamientoCCON.ENABLE
Salida en VPWP
1
0
InicioCPOS.START
ParadaCCON.STOP
1
0
1
0
1
0
1
0
1
0
24 V
0 V
Abierto
Cerrado
Soltar frenoCCON.BRAKE
FuncionamientohabilitadoSCON.READY
AccionamientohabilitadoSCON.ENABLED
Estado freno/unidad de bloqueo
p. ej. 50 ms
La unidad de bloqueo/freno se abre
Fig. 3.6 Desarrollo de la apertura de unidad de bloqueo/freno
El tiempo real para abrir la unidad de bloqueo/freno depende de la inercia mecánica de los
componentes utilizados.

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 59
La Tab. 3.5 muestra un resumen para diferentes casos al abrir y cerrar el freno.
Estado, acción Desarrollo o estado al:
Abrir la unidad debloqueo/freno
Cerrar la unidad debloqueo/freno
Accionamiento bloqueado Salida VPWP (pin 2) = 24 V Salida VPWP (pin 2) = 0 V
Activar accionamiento
simultáneamente
1. Salida VPWP (pin 2) = 24 V
2. Control de posición con
nominal = real
3. SCON.ENABLED = 1
1. Control de posición con
nominal = real
2. SCON.ENABLED = 1
3. Salida VPWP (pin 2) = 0 V,
simultáneamente regulación
de fuerza con fuerza 0Accionamiento activo Salida VPWP (pin 2) = 24 V,
simultáneamente conmutación
de regulación de fuerza a control
de posición con parada y
comparación nominal-real
1. Salida VPWP (pin 2) = 0 V,
simultáneamente parada con
comparación nominal-real
2. Regulación de fuerza con
fuerza 0
Bloquear accionamiento
simultáneamente
Salida VPWP (pin 2) = 24 V,
bloquear accionamiento
simultáneamente
(SCON.ENABLED = 0)
1. Bloquear accionamiento
(SCON.ENABLED = 0)
2. Salida VPWP (pin 2) = 0 V
Tab. 3.5 Comportamiento al abrir y cerrar la unidad de bloqueo/freno
La Tab. 3.6 muestra un resumen para diferentes casos al habilitar y bloquear el accionamiento.
Estado, acción Desarrollo o estado al:
Habilitar el accionamiento Bloquear el accionamiento
Unidad de bloqueo/freno
cerrado
1. Control de posición con
nominal = real
2. SCON.ENABLED = 1
3. Regulación de fuerza con
fuerza 0
Bloquear accionamiento
(SCON.ENABLED = 0)
Unidad de bloqueo/freno
abierto
1. Control de posición con
nominal = real
2. SCON.ENABLED = 1
Bloquear accionamiento
(SCON.ENABLED = 0)
Tab. 3.6 Comportamiento al habilitar y bloquear el accionamiento
“Bloquear accionamiento” a través de los datos de entrada (CCON.ENABLE = 0) o bien
internamente en el CMAX en caso de un error activo del nivel F2.

3 Funciones del accionamiento
60 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
3.1.8 Motion Complete (MC)Motion Complete (MC) define si hay una orden de posicionamiento activa. Reglas para Motion Complete:
– MC = 0 se activa al iniciar una orden de posicionamiento. La activación se realiza antes deSPOS.ACK = 1 en:
– Orden de posicionamiento en modo de frase o modo directo (control de posición o fuerza)
– Actuación secuencial
– Recorrido de referencia
– Identificación y prueba de movimiento
– MC = 0 no se activa en:
– Parada
– Bloquear accionamiento
– MC = 1 se activa:
– Cuando se cumple la condición MC para la orden de posicionamiento iniciada (véase la lista de
las órdenes de posicionamiento al activar MC = 0)
– Si el accionamiento se ha parado o bloqueado y se ha alcanzado la velocidad = 0
– MC se activa por primera vez tras la conexión (estado “Accionamiento bloqueado”).
Con la regulación de fuerza, la fuerza de arranque puede hacer que la condición MC se cumpla ya al
principio de la orden de posicionamiento. Si es así, los criterios para la condición MC pueden verse
afectados por los parámetros de tiempo de supervisión, tolerancia, etc.
Dependiendo de la duración de ciclo, SPOS.MC = 0 no se puede detectar siempre (p. ej.
en caso de posicionamiento con parada rápida en posición real).
A partir del momento en que SPOS.ACK = 1, MC es válido para la orden de
posicionamiento iniciada, incluso si no es posible detectar un cambio de estado en el
control.
Control de posiciónLa señal Motion Complete (SPOS.MC) indica si la última orden de posicionamiento iniciada ha
finalizado. Esta se compone de varias condiciones lógicas (� Tab. 3.7 y Fig. 3.7).
Condición Descripción
La entrada
permanece dentro
del margen de
tolerancia para la
posición
La posición real alcanza el margen de tolerancia de posición y no vuelve a salir
de él durante el tiempo de supervisión ajustado. El tiempo de supervisión
(PNU 1154) se puede parametrizar con el FCT (datos del regulador ->
controlador de posición). El margen de tolerancia de posición equivale a la
posición de destino ± la tolerancia ajustada actualmente.
La entrada
permanece dentro
del margen de
tolerancia para la
velocidad
La velocidad real alcanza el margen de tolerancia de la velocidad para reposo y
no vuelve a salir de él durante el tiempo de supervisión ajustado. El tiempo de
supervisión es el mismo que el de la posición (PNU 1154). El margen de
tolerancia es de ±4 mm/s (±0,16 ft/s; ±4°/s).
Timeout de arranque
(error E31)
Al iniciarse la curva de valor nominal, el eje debe moverse un mínimo de 11 mm
(0,43 in; 11°) dentro del tiempo de timeout (PNU 1153), de lo contrario, el
CMAX indica un timeout de arranque.

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 61
Condición Descripción
Timeout de
posicionamiento
(error E30)
Al finalizar la curva de valor nominal deben cumplirse las condiciones de
posición y de velocidad. Si una de las condiciones no se cumple antes de
finalizar el timeout (PNU 1153), el CMAX indica un timeout de
posicionamiento.
Tab. 3.7 Condiciones para Motion Complete
MC se activa en la categoría de calidad “Parada rápida” en cuanto la posición real alcanza el margen de
tolerancia de la posición. No se espera al tiempo de supervisión, la condición de la velocidad no se
tiene en cuenta. Ello significa que el eje todavía puede moverse en el momento de activarse MC. Es
posible que se salga del margen de tolerancia.
A causa de la parada rápida se reduce correspondientemente el tiempo de posicionamiento (= tiempo
hasta MC); esto es adecuado para posiciones que no requieren una precisión demasiado alta.
6
2
4
1
SPOS.MC
7
8 9
aJ
aJ
aJ
aJ
5
3
1 Valor objetivo de posición2 Valor nominal/valor efectivo de posición3 Margen de tolerancia de posición4 Valor nominal/valor efectivo de la velocidad5 Margen de tolerancia de velocidad para
reposo
6 Inicio de la curva de valor nominal7 Fin de la curva de valor nominal8 Timeout 1 (timeout de arranque)9 Timeout 2 (timeout de posicionamiento)aJ Tiempo de supervisión
Fig. 3.7 Motion Complete (control de posición)

3 Funciones del accionamiento
62 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Regulación de fuerzaEn la regulación de fuerza, las condiciones de MC son iguales a las del control de posición tomadas
respecto al valor nominal de fuerza y a la tolerancia de fuerza.
Características especiales:
– En la fase del control de posición con velocidad reducida no se emite ningún MC (� Sección 3.1.2).
Si el controlador cambia al control de posición solo después de MC=1 con velocidad reducida, MC
no se volverá a poner en 0.
– Timeout: PNU 1163
– La tolerancia de velocidad para reposo no se supervisa (es decir, el accionamiento se puede mover)
– No hay advertencia de reposo
– no hay timeout de arranque (la función depende de la monitorización de presión � error E50)
3.1.9 Bits de estado del controlador actualizados dinámicamente MOV, DEV y STILLEl byte de estado SPOS contiene tres bits de estado del controlador.
Bit Descripción
SPOS.MOV El eje se mueve
SPOS.DEV Error de seguimiento / fuera del margen de tolerancia
SPOS.STILL Advertencia de reposo
Tab. 3.8 Bits de estado del controlador
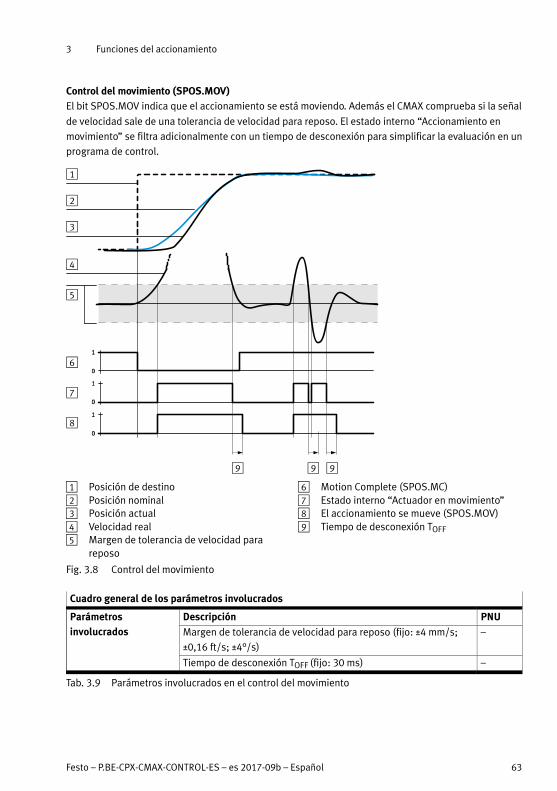
3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 63
Control del movimiento (SPOS.MOV)El bit SPOS.MOV indica que el accionamiento se está moviendo. Además el CMAX comprueba si la señal
de velocidad sale de una tolerancia de velocidad para reposo. El estado interno “Accionamiento en
movimiento” se filtra adicionalmente con un tiempo de desconexión para simplificar la evaluación en un
programa de control.
1
2
3
4
5
6
7
8
9 9 9
1 Posición de destino2 Posición nominal3 Posición actual4 Velocidad real5 Margen de tolerancia de velocidad para
reposo
6 Motion Complete (SPOS.MC)7 Estado interno “Actuador en movimiento”8 El accionamiento se mueve (SPOS.MOV)9 Tiempo de desconexión TOFF
Fig. 3.8 Control del movimiento
Cuadro general de los parámetros involucrados
Parámetrosinvolucrados
Descripción PNU
Margen de tolerancia de velocidad para reposo (fijo: ±4 mm/s;
±0,16 ft/s; ±4°/s)
–
Tiempo de desconexión TOFF (fijo: 30 ms) –
Tab. 3.9 Parámetros involucrados en el control del movimiento

3 Funciones del accionamiento
64 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Control de error de seguimiento o de tolerancia (SPOS.DEV)El bit SPOS.DEV (“Deviation” = error de seguimiento) indica que el error de regulación (es decir, la
desviación entre el valor nominal y el real) excede un valor determinado. La desviación admisible
depende del estado del movimiento del accionamiento.
– Antes de alcanzar Motion Complete (SPOS.MC = 0)
– Durante el control de posición: Error de seguimiento, salir del margen de tolerancia de error de
seguimiento de ±11 mm (±0,43 in; ±11°)
– Durante la regulación de fuerza: No hay supervisión (SPOS.DEV = 0)
– Después de alcanzar Motion Complete (SPOS.MC = 1): Salir del margen de tolerancia (fuerza o
posición). El margen de tolerancia equivale al valor objetivo ± la tolerancia parametrizada
actualmente para la orden de fuerza o de posicionamiento.
La siguiente figura muestra el principio del control de error de seguimiento o de tolerancia. La
denominación en la figura hace referencia al control de posición.
1
2
3
4
5
6
4
5
7
8
9 aJ
5
4
4
5
1 Valor objetivo2 Valor nominal3 Valor efectivo4 Margen de tolerancia de posición5 Margen de tolerancia de error de seguimiento
6 Error de regulación7 Motion Complete (SPOS.MC)8 Error de seguimiento (SPOS.DEV)9 Error de seguimiento activoaJ Salir del margen de tolerancia
Explicación: 1 ... 3: Progreso de los valores nominal y real.
4 ... 6: Representación ampliada del error de regulación y de los dos márgenes de tolerancia.
7: La señal MC determina cuándo se utiliza cada tolerancia.
Fig. 3.9 Control de la tolerancia o de error de seguimiento
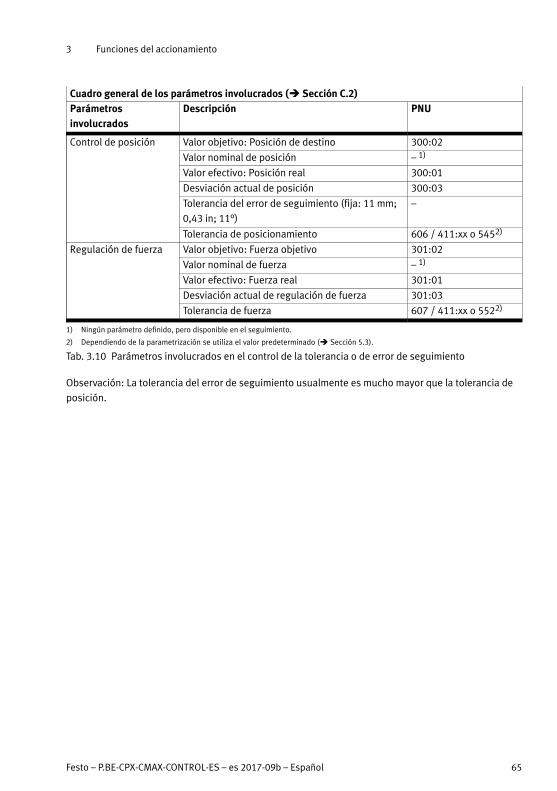
3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 65
Cuadro general de los parámetros involucrados (� Sección C.2)Parámetrosinvolucrados
Descripción PNU
Control de posición Valor objetivo: Posición de destino 300:02
Valor nominal de posición – 1)
Valor efectivo: Posición real 300:01
Desviación actual de posición 300:03
Tolerancia del error de seguimiento (fija: 11 mm;
0,43 in; 11°)
–
Tolerancia de posicionamiento 606 / 411:xx o 5452)
Regulación de fuerza Valor objetivo: Fuerza objetivo 301:02
Valor nominal de fuerza – 1)
Valor efectivo: Fuerza real 301:01
Desviación actual de regulación de fuerza 301:03
Tolerancia de fuerza 607 / 411:xx o 5522)
1) Ningún parámetro definido, pero disponible en el seguimiento.
2) Dependiendo de la parametrización se utiliza el valor predeterminado (� Sección 5.3).
Tab. 3.10 Parámetros involucrados en el control de la tolerancia o de error de seguimiento
Observación: La tolerancia del error de seguimiento usualmente es mucho mayor que la tolerancia de
posición.

3 Funciones del accionamiento
66 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Supervisión de reposo (SPOS.STILL)El bit de advertencia de reposo indica si el accionamiento se ha movido una vez más después de
alcanzar Motion Complete.
SPOS.STILL Descripción
= 0 Ningún movimiento
= 1 Advertencia: El accionamiento se ha desplazado después del MC.
El bit queda memorizado hasta el siguiente inicio.
Tab. 3.11 Estados de la supervisión de reposo
La supervisión de reposo se activa en cuanto se pone SPOS.MC = 1. La supervisión de reposo solo se
ejecuta con el control de posición activo y cuando hay una información de referencia válida (SPOS.REF = 1).
En el recorrido de referencia, cuando hay una parada rápida configurada o en caso de parada, la supervisión
de reposo se desactiva (es decir, no se emite una advertencia de reposo aunque el actuador aún se mueva
después del MC).
El bit de advertencia de reposo se activa cuando se cumple al menos una de las siguientes condiciones:
– El accionamiento ha salido del margen de tolerancia de velocidad para reposo (±4 mm/s; ±0,16 ft/s;
±4°/s) durante un periodo más largo que el tiempo de filtro TF de 30 ms. El tiempo de filtro impide
que la advertencia se emita a causa de ruidos o similares.
– El accionamiento ha salido del margen de tolerancia de reposo. El margen de tolerancia de reposo
es la posición al alcanzar la condición MC ± tolerancia de posición, pero como mínimo ±0,1 mm
(±0,004 in; ±0,1°). El accionamiento no puede salir del margen real de tolerancia de posición
(posición de destino ± tolerancia de posición).
Una advertencia de reposo no se registra en la memoria de diagnosis. el bit de advertencia de reposo
se desactiva con el inicio de la próxima orden de posicionamiento o al bloquear el controlador.

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 67
1
2
3
4
5
6
7
8
9
aJ
aA aB
1 Posición de destino2 Posición nominal3 Posición actual4 Margen de tolerancia de posición5 Margen de tolerancia de reposo6 Velocidad real7 Margen de tolerancia de velocidad para
reposo
8 Supervisión de reposo activa9 Motion Complete (SPOS.MC)aJ Advertencia de reposo (SPOS.STILL)aA Condición de posición cumplida: Fuera de la
tolerancia de reposoaB Condición de velocidad cumplida: El
accionamiento se ha movido durante 30 ms
Fig. 3.10 Supervisión de reposo
Cuadro general de los parámetros involucrados (� Sección C.2)
Parámetrosinvolucrados
Descripción PNU
Posición nominal actual 300:02
Posición real 300:01
Tolerancia de posicionamiento 606 / 411:xx o 5451)
Tolerancia de reposo = 0,5 * tolerancia de
posición, como mínimo 0,1 mm (0,004 in; 0,1°)
–
Inicio (FHPP) SPOS.MC = Flanco ascendente: Orden de posicionamiento finalizada
Acuse de recibo(FHPP)
SPOS.STILL = 1:Advertencia de reposo activada, el accionamiento se ha
movido después del MC
1) Dependiendo de la parametrización se utiliza el valor predeterminado (� Sección 5.3).
Tab. 3.12 Parámetros involucrados en la supervisión de reposo

3 Funciones del accionamiento
68 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
3.1.10 Limitación de valores nominalesPara un posicionamiento rápido sin desbordamiento al alcanzar el valor nominal de posición o de
fuerza, el CMAX limita los valores nominales demasiado grandes para las aceleraciones y
deceleraciones. En la identificación dinámica se determinan los valores máximos de aceleración que
permiten posicionar sin desbordamiento. Estos valores pueden ser inferiores a las aceleraciones y
deceleraciones físicamente alcanzables, dependiendo de la carga de masa, posición de inicio y de
destino, etc. Al posicionar, el CMAX limita automáticamente los valores nominales indicados por el
usuario para la velocidad y la aceleración a los valores máximos determinados.
En una orden de posicionamiento el CMAX genera un conjunto de datos que compara los valores
nominales del usuario con los valores máximos determinados por el controlador. En el FCT pueden
visualizarse los valores utilizados en el registro “Limitación”. Si no se ha ejecutado la identificación
dinámica, el usuario debe determinar los valores límite admisibles para los valores nominales. La
utilización de estos valores límite determinados como valores nominales garantiza un posicionamiento
sin desbordamiento.
Control de posición
Si, debido a los valores nominales de aceleración, se genera una curva de valor nominal que el
accionamiento no puede seguir, ello puede causar desbordamientos en la posición de destino. En la
identificación dinámica se determina la velocidad máxima alcanzable y las capacidades de aceleración
y de deceleración del sistema de accionamiento. El objetivo es obtener un comportamiento de
posicionamiento sin desbordamiento.
Ejemplos � Ayuda Online del plugin FCT CMAX, Registro Online “Limitación” (“Limits”).
Regulación de fuerzaEn la regulación de fuerza se limitan la fuerza marcada como objetivo y la rampa de fuerza. Del mismo
modo que en el control de posición, en el FCT se indican los valores inicial y el marcado como objetivo.
El valor marcado como objetivo es siempre la fuerza marcada como objetivo. El valor inicial es el último
valor nominal. Si el control de posición estaba activo, el último valor nominal es siempre 0 N. Las
posiciones inicial y de destino también son válidas, pero el FCT no las indica. En este caso se utiliza la
posición real.
Parámetro Valores de limitaciónEl parámetro Valores de limitación (PNU 1173) contiene una estructura con los valores importantes
para la indicación. Si el CMAX ha determinado valores, activa el bit “Hay valores nuevos” en la palabra
de estado.

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 69
3.1.11 Bit de vidaCon el bit de vida SPOS.LIFE una unidad de control de nivel superior puede comprobar la accesibilidad
y funcionamiento del CMAX.
El CMAX invierte cíclicamente el estado del bit de vida conforme al tiempo de intervalo ajustado (PNU
1145): Al inicio del intervalo de tiempo se activa SPOS.LIFE y se restablece una vez transcurrida la
mitad del tiempo de intervalo.
Bit de vidaSPOS.LIFE
1
0
Tiempo de intervalo
50 % 50 %
Fig. 3.11 Bit de vida para la temporización
Con un tiempo de intervalo ajustado de 0 (desactivado) SPOS.LIFE se establece en 0 de forma perma
nente.
3 Funciones del accionamiento
70 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
3.2 Funciones de puesta a punto
3.2.1 prueba de movimiento
La prueba de movimiento sirve para detectar errores en el conexionado de tubos.
Recomendación: Ejecutar prueba de movimiento sin carga útil.
NotaSi las tuberías de la VPWP se conectan intercambiadas, el sentido de regulación es
incorrecto. Al activar el regulador, el accionamiento se desplazaría a la máxima
velocidad hacia una posición final.
Ejecutar la prueba de movimiento en los casos siguientes:� Durante la puesta a punto después de la parametrización.
Después de la parametrización, el CMAX espera a que se ejecute la prueba de movimiento y lo
indica visualizando C03 en el display.
� Siempre que se cambien componentes o que se vuelvan a conectar tubos que se hubiesen soltado.
Casos especiales:– Si se ignora la prueba de movimiento (no recomendado), debe ajustarse el estado de la prueba de
movimiento como corresponde.
– ¡El CMAX repone automáticamente el estado de la prueba de movimiento cuando se producen los
errores E01 y E08!
– Para ejecutar una prueba de movimiento más adelante (p. ej., después de cambiar hardware), el
estado de la prueba de movimiento debe reponerse manualmente si es necesario.

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 71
Ejecución de la prueba de movimientoLa prueba de movimiento debe ejecutarse sin activar el controlador. La válvula solo se controla, es
decir, el valor regulado de la válvula se calcula independientemente de una desviación de regulación.
En su lugar se da presión deliberadamente a una cámara del cilindro hasta que el accionamiento se
mueve. En función del cambio de posición, se decide si el accionamiento se ha movido en el sentido
correcto.
1. Para ejecutar la prueba de movimiento, la habilitación debe comunicarse (CCON.ENABLE = 1,
CCON.STOP =1). El parámetro “Estado de prueba de movimiento” (PNU 1174) contiene, con el bit 0,
una marca para la prueba de movimiento ejecutada. Si el bit 0 tiene el valor 0, el accionamiento
permanece bloqueado (controlador inactivo) incluso si se habilita el CMAX. A pesar de ello, el CMAX
señala el estado “Desbloqueado”.
2. Si hay una unidad de bloqueo configurada, ésta debe liberarse antes de iniciar la prueba de
movimiento.
NotaSi se suelta la unidad de bloqueo con el controlador desconectado, el accionamiento
puede caerse, sobre todo en construcción vertical, justo después del inicio o durante la
prueba de movimiento.
� Asegúrese de que ello no ponga en peligro la seguridad.
� Recomendación para el funcionamiento vertical: Bajar el actuador hasta un tope o
colocarlo en la posición final antes de iniciar la prueba de movimiento.
3. Con el flanco ascendente en CPOS.START, la prueba de movimiento se inicia cuando se activa el
número 2 de función de la puesta a punto. Los dos parámetros deben tener el valor 0. Al iniciar otra
función o una orden de posicionamiento o de fuerza se indica el error E14.
4. El CMAX inicia entonces un ciclo interno en el que se especifican directamente los valores regulados
de la válvula y se efectúa una evaluación dependiendo de la reacción del accionamiento. Al final se
registra el resultado en el parámetro “Estado de prueba de movimiento”. El final de la prueba de
movimiento se señala con SPOS.MC = 1.
Si el conexionado de tubos es correcto, el controlador se desbloquea al finalizar la prueba de
movimiento. Así, el CMAX activa automáticamente el bit 0 del estado de la prueba de movimiento y lo
ajusta al valor 1, la indicación del CMAX cambia a “000”. Si el conexionado de tubos es incorrecto o se
ha obtenido un resultado equívoco, el bit 0 sigue a 0, el controlador no se habilita y se emite un
mensaje de error E13 o E15.

3 Funciones del accionamiento
72 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
PNU 1174: Estado de la prueba de movimientoBit Descripción
0 = 0: Debe realizarse una prueba de movimiento
= 1: No es necesario realizar la prueba de movimiento
1 = 0: Prueba de movimiento no ejecutada
= 1: Prueba de movimiento ejecutada
2 = 0: El resultado de la prueba de movimiento no es inequívoco
= 1: El resultado de la prueba de movimiento es inequívoco
3 = 0: Error en el conexionado de tubos
= 1: Conexionado de tubos correcto
4 = 0: Prueba de movimiento no ignorada
= 1: Prueba de movimiento ignorada
5 ... 31 No relevantes (reservados)
Tab. 3.13 Estado de la prueba de movimiento
Al escribir los parámetros de la función de la puesta a punto (PNU 1192:07) se influye en el estado de
la prueba de movimiento:
= 1: La prueba de movimiento se repone y debe repetirse.
= 2: La prueba de movimiento se activa a “Ejecución innecesaria” y se ignora.
El parámetro solo puede escribirse cuando el CMAX está en el modo Puesta a punto y no hay un
desbloqueo.
Causas típicas de errores en la aplicación
– Si el bit 0 tiene el valor 0 en el parámetro “Prueba de movimiento” (PNU 1174), el CMAX solo puede
ejecutar una prueba de movimiento. Cualquier otra orden de posicionamiento (p. ej., identificación,
actuación secuencial, etc.) causa un error.
Notas sobre el conexionado correcto de tubos
Valor regulado normalizado Ventilación Escape deaire
El accionamiento
-100 % 1 --> 4 2 --> 3 ... se mueve en el sentido de valores
efectivos más pequeños
0 % Cerrada Cerrado ... no se mueve
+100 % 1 --> 2 4 --> 5 ... se mueve en el sentido de valores
efectivos más grandes

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 73
3.2.2 Recorrido de referenciaEn accionamientos con sistema de medición del recorrido incremental es condición previa realizar un
recorrido de referencia para una orden de posicionamiento. El recorrido de referencia puede ejecutarse
en todos los modos de funcionamiento soportados excepto en Parametrización.
El accionamiento se referencia en relación a un tope o, en casos especiales, a la posición actual. Un
émbolo en reposo indica que se ha alcanzado el tope. Esto se cumple solo si se exceptúa la posibilidad
de que la falta de presión de aire cause el reposo.
Puesto que con ejes neumáticos el punto cero del eje debe estar sobre el punto cero del cilindro, el
accionamiento, al contrario que, p. ej., los actuadores eléctricos, no se desplaza automáticamente a
este punto cero.
Descripción de los métodos de recorridos de referencia � Tab. 3.15.
Notas generales sobre el referenciado
– Los ejes pierden su referencia:
– en caso de desconexión/reset
– cuando hay errores en la conexión de sensores o en el ramal
– al iniciar de nuevo un recorrido de referencia
– Si el accionamiento dispone de un sistema de medición de recorrido que transmite valores
absolutos, no es posible realizar un recorrido de referencia. Un flanco ascendente en la entrada
CPOS.HOME causará un error. El movimiento no se activa.
Desarrollo y parametrización del recorrido de referenciaEl accionamiento se referencia en relación a un tope (o a la posición real actual).
Tras el inicio del recorrido de referencia el CMAX ejecuta los pasos siguientes:
1. Reposición del estado del recorrido de referencia a “No referenciado”.
2. Búsqueda del punto de referencia (tope mecánico).
3. Después del reposo y de un tiempo de espera, en la cámara del cilindro a presión debe medirse una
presión mínima de al menos 2/3 de la presión de funcionamiento ajustada.
4. Determinación del punto cero del eje/punto cero del cilindro mediante activación del decalaje
correspondiente respecto al punto de referencia (� B.1).
5. Tras alcanzar el tope, el CMAX activa el estado SPOS.REF = 1. El final del recorrido de referencia se
señaliza seguidamente con SPOS.MC = 1.

3 Funciones del accionamiento
74 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Cuadro general de los parámetros involucrados (� Sección C.2.12)
Parámetros involucrados
Descripción PNU
Desplazamiento del punto cero del eje 1130
Método de recorrido de referencia (admisibles: -18, -17, 35) 1131
Velocidad de recorrido de referencia 1132
Carga útil de recorrido de referencia 1134
Inicio (FHPP) CPOS.HOME = Flanco ascendente: Inicio de recorrido de referencia, ac
tuación secuencial tiene prioridad
Acuse de recibo(FHPP)
SPOS.ACK = Flanco ascendente: Confirmación de inicio
SPOS.MC = 1: Movimiento completado
SPOS.REF = 1: Accionamiento referenciado
Tab. 3.14 Parámetros involucrados en el recorrido de referencia
Los valores nominales transmitidos a los datos I/O no influyen en el recorrido de
referencia.
El offset del punto cero del eje influye de manera considerable en la optimización de
regulación del CMAX, incluso valores pequeños (algunos mm) deben especificarse
previamente con exactitud:
– Como offset debe medirse la distancia entre el tope utilizado (del punto de referencia)
y la posición final del cilindro (vástago retraído) e introducirse como valor negativo.
– Si el vástago está retraído por completo (posición final del cilindro), debe introducirse
el valor 0 como offset.
NotaSi se introduce un valor impreciso del offset, el accionamiento puede oscilar
considerablemente dependiendo del ajuste de los parámetros involucrados.
� Repetir siempre la identificación después de corregir el decalaje.
Métodos del recorrido de referencia
Los métodos del recorrido de referencia se basan en el CiA 402 (perfil de equipo para
actuadores eléctricos � www.can-cia.org).

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 75
Métodos del recorrido de referenciahex dec Descripción
23h 35 Posición actual� La posición actual se toma como punto de
referencia.
EFh -17 Tope negativo� Desplazamiento a velocidad de referencia en
sentido negativo hacia el tope. Esta posición
se toma como punto de referencia.
EEh -18 Tope positivo� Desplazamiento a velocidad de referencia en
sentido positivo hacia el tope. Esta posición
se toma como punto de referencia.
Tab. 3.15 Cuadro general de los métodos de recorrido de referencia

3 Funciones del accionamiento
76 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
3.2.3 IdentificaciónEn la identificación se determinan los parámetros de tramo influidos por variaciones de fabricación
(p. ej., el recubrimiento de válvula, rozamiento del cilindro) o por factores de montaje (p. ej.,
conexionado de tubos, rozamiento externo) cuyo conocimiento es importante para el funcionamiento
del controlador.
Para obtener un buen resultado en la identificación, todas las condiciones límite deben
estar ajustadas correctamente, en especial los datos básicos (carga básica, carga útil,
presión de alimentación, etc.), así como las características mecánicas del accionamiento
(sobre todo el decalaje del punto cero del eje).
� Repetir la identificación si una de estas magnitudes cambia durante el
funcionamiento.
¿Cuándo es necesario ejecutar la identificación?La identificación es necesaria en la puesta a punto, al modificar los datos válidos de configuración o si
se cambian determinados componentes � Apéndice A.3.1. Si el CMAX detecta una modificación de
este tipo al comparar la configuración nominal con la real, se genera un mensaje de error y el regulador
no se activa.
No es obligatorio restablecer los datos de identificación, p. ej., si el error se ha producido por el
intercambio de ramales, los datos de identificación pueden seguir utilizándose una vez eliminado el
error.
– El CMAX emite una advertencia si es aconsejable realizar una identificación debido a una
modificación efectuada.
– El CMAX emite un error cuando es necesario realizar una identificación debido a una modificación
efectuada.
– El parámetro Estado de identificación (PNU 1171) contiene la información sobre el estado de la
identificación.
Identificación estática y dinámicaIdentificación estáticaEn la identificación estática se determinan magnitudes que influyen en el comportamiento de
regulación del sistema durante el posicionamiento así como en la regulación de reposo y la “fuerza 0”
en la regulación de fuerza.
Entre ellas se cuentan el rozamiento de adherencia del accionamiento y las características de la válvula
en el área de la posición central (histéresis de válvula).
Identificación dinámicaEn la identificación dinámica se determina la capacidad de aceleración y de deceleración del sistema de
accionamiento. Los valores máximos determinados limitan la aceleración y la deceleración nominal en
órdenes de posicionamiento a valores factibles. Así se evitan errores de seguimiento y los
consecuentes desbordamientos en la posición de destino. En el perfil automático el CMAX utiliza
siempre la aceleración máxima determinada. En los ejes que deben desplazarse con el perfil
automático es necesario efectuar la identificación dinámica.
La parte dinámica de la identificación puede desactivarse. Esto es importante en el caso de que la
estructura no soporte las cargas dinámicas. Sin una identificación dinámica no se determinan los

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 77
valores máximos de la aceleración del sistema. En órdenes de posicionamiento con “Perfil automático”
se emite una advertencia (W37) y la orden de posicionamiento se ejecuta con el “Perfil libre” y los
valores predeterminados parametrizados (PNU 600/602/603).
Para evitar desbordamientos, en este caso el usuario tiene que optimizar las aceleraciones. Bajo
determinadas circunstancias, para diferentes carreras de posicionamiento se requieren valores de
aceleración distintos.
La identificación dinámica no influye en la regulación de fuerza.
Desarrollo de la identificaciónEl recorrido de identificación se desarrolla en varios pasos:
1. Identificación estática
2. Identificación dinámica (si está configurada)
3. Cuando se ha ejecutado la identificación dinámica:
Determinación de valores medios para aceleración y deceleración para el perfil libre en ambos
sentidos.
En la identificación estática, el eje avanza primero hasta el centro de la carrera nominal y aquí ejecuta
movimientos pequeños en ambas direcciones. Si no es posible avanzar hasta el centro de la carrera
nominal debido a una posición final por software, el CMAX se aproxima a dicha posición final al inicio
de la identificación estática.
Para un desarrollo óptimo de la identificación dinámica debe haber una zona de movimiento libre lo
más grande posible. El eje se desplaza por todo el margen de desplazamiento (carrera útil):
En accionamientos con una longitud del cilindro < 100 mm no se ejecuta la identificación dinámica.
Realización de la identificaciónCondición previa: Hay información de referencia, SPOS.REF = 1.
1. Ajustar el modo Puesta a punto.
2. Preparar la identificación:
– Ajustar la función 1 de la puesta a punto.
– Parámetro 1 = 0
– Parámetro 2 = Carga actual en el sistema de medida
3. Iniciar con flanco ascendente en CPOS.START.
4. Esperar a SPOS.MC = 1.
5. El CMAX registra el resultado de la identificación en el estado de la identificación (PNU 1171).

3 Funciones del accionamiento
78 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
PNU 1171: Estado de identificaciónBit Descripción
0 = 0: Todavía no se ha ejecutado la identificación.
= 1: La identificación se ha ejecutado 1 vez como mínimo.
1 = 0: No hay resultados de la identificación estática.
= 1: Identificación estática ejecutada correctamente.
2 = 0: No hay resultados de la identificación dinámica.
= 1: Identificación dinámica ejecutada correctamente.
3 ... 31 No relevantes (reservados)
Tab. 3.16 Estado de la identificación
Notas:
– Si durante el funcionamiento se producen grandes modificaciones de la carga útil, también es
necesario ejecutar la identificación con la carga útil mayor y la carga útil menor respectivamente.
– Si el recorrido de identificación activo se interrumpe, los datos de identificación estáticos o
dinámicos determinados hasta ese punto permanecen activos.
Puesta a cero de la identificaciónLos datos de la identificación pueden restablecerse manualmente con PNU 1192:03
(� Sección C.2.16).
Con esta operación también se reponen los datos de adaptación.
Recomendación:
Después de sustituir componentes o modificar parámetros de la configuración del accionamiento
(� C.2.11) o ajustes de la aplicación (� C.2.12) es necesario restablecer los datos de identificación
antes de ejecutar una nueva identificación.

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 79
3.2.4 AdaptaciónTras una identificación efectuada correctamente, los valores de adaptación se determinan
automáticamente durante el funcionamiento.
La adaptación puede mejorar automáticamente un comportamiento de ajuste no óptimo. Los efectos a
largo plazo y los valores no identificados exactamente son la causa de un comportamiento de ajuste
erróneo en pequeños márgenes de tolerancia.
La adaptación influye en el control de posición, no en la regulación de fuerza.
Desconexión de la adaptación
La adaptación puede desactivarse mediante la parametrización. Por lo general, esto no es necesario en
ninguna configuración ya que la adaptación empeora el comportamiento de posicionamiento muy
raramente.
Importante: No siempre que el comportamiento de posicionamiento empeora se debe a una
adaptación errónea. El desgaste o una construcción deficiente también pueden causar, p. ej., que a lo
largo del tiempo aumenten los tiempos de posicionamiento o incluso que los mensajes de error E30 se
emitan con más frecuencia. Por lo tanto, la adaptación debe desactivarse solo en casos justificados.
Los comportamientos siguientes podrían deberse a una adaptación errónea:
– Después de la puesta a punto, el comportamiento de posicionamiento empeora a lo largo del
tiempo. Los tiempos de posicionamiento aumentan, el ciclo de la máquina crece. El error E30 se
emite con más frecuencia.
– Después de una identificación, el comportamiento mejora considerablemente sin realizar más
modificaciones. Sin embargo, lentamente vuelve a empeorar hasta que se realiza otra
identificación.
Una posible causa puede ser el posicionamiento contra una fuerza perturbadora no uniforme.
En estos casos la adaptación podría ser la causa de un empeoramiento del comportamiento de
posicionamiento.
Si cree que puede ser así, desactive la adaptación y ejecute de nuevo la identificación. Si a
continuación el comportamiento de posicionamiento sigue igual, es probable que la adaptación fuese
la causa y debe permanecer desactivada.

3 Funciones del accionamiento
80 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
3.2.5 Operación por actuación secuencialEn el estado “Funcionamiento habilitado”, el accionamiento puede desplazarse en sentido positivo o
negativo mediante actuación secuencial. Esta función se utiliza generalmente para:
– desplazamiento a las posiciones de programación por teach-in
– apartar el accionamiento de su lugar (p. ej., tras un fallo del sistema)
– desplazamiento manual como modo de funcionamiento normal (avance manual)
Desarrollo1. Con flanco ascendente en una de las señales de actuación secuencial positiva / negativa
(CPOS.JOGP/CPOS.JOGN) el accionamiento empieza a moverse lentamente (fase lenta). Debido a la
baja velocidad, es posible el desplazamiento a una posición con mucha precisión.
2. Si la señal permanece activa durante más tiempo que la duración de la marcha lenta parametrizada,
la velocidad aumenta hasta alcanzar la velocidad máxima configurada. De esta forma pueden
realizarse rápidamente grandes carreras.
3. Si la señal cambia a 0, el accionamiento se frena con la máxima deceleración ajustada.
4. Si el accionamiento alcanza una posición final por software, se detiene automáticamente. No se
sobrepasa la posición final por software, el recorrido para detenerse depende de la rampa ajustada.
Aquí tampoco se vuelve a salir de la operación por actuación secuencial antes de CPOS.JOGx = 0.
CPOS.JOGP oCPOS.JOGN (Jogpositivo/negativo)
Velocidad
Tiempo
1
0
1
2
3 4
5
1 Velocidad lenta (recorrido lento)2 Velocidad máxima3 Aceleración
4 Deceleración5 Duración de la marcha lenta
Fig. 3.12 Diagrama de flujo para la operación por actuación secuencial
Estados operativos especiales
– Antes de referenciar, la actuación secuencial solo es posible con velocidad de referencia. (PNU 1132).
– Si el accionamiento está fuera de las posiciones finales por software, puede desplazarse dentro del
margen permitido con la actuación secuencial.
– Si el accionamiento está fuera de las posiciones finales por software y no está en el modo Puesta a
punto, permanece parado si se desplaza todavía más hacia fuera con la actuación secuencial. Se
emite el error E33.
– Si las posiciones finales por software están desactivadas, el accionamiento se desplaza hasta las
posiciones finales por hardware.

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 81
– En el modo Puesta a punto pueden sobrepasarse las posiciones finales por software. En este caso, el
accionamiento se para primero en las posiciones finales por software y la actuación secuencial debe
iniciarse de nuevo en la posición final. Con el flanco ascendente en CPOS.JOGx, el accionamiento se
desplaza a velocidad lenta hasta las posiciones finales por hardware. Esto permite, p. ej., programar por
teach-in las posiciones finales por software o el punto cero del proyecto.
Al sobrepasar las posiciones finales por software se emite la advertencia W35.
– CPOS.JOGN tiene prioridad. Si JOGP y JOGN se activan simultáneamente, el accionamiento se
desplaza en sentido negativo.
Timeout durante la actuación secuencialEl timeout no se capta durante la actuación secuencial independientemente del modo de
funcionamiento. Si el eje está atascado y no se mueve en absoluto, se genera el error E31 (no hay
movimiento después de iniciar).
Si el CMAX determina un reposo del eje antes de alcanzar la posición de destino (posición final por
software o por hardware), p. ej., debido a un tope o a un obstáculo, se emite el error E30 (la posición
de destino no puede alcanzarse).
Tanto durante la marcha lenta como durante la fase de velocidad máxima pueden producirse los
errores E31 o E30. Esto se debe a que el CMAX ejecuta internamente dos órdenes de posicionamiento.
Dado que el accionamiento puede moverse por actuación secuencial hasta la posición final por
hardware en el modo Puesta a punto, en principio es posible un timeout es posible. El desplazamiento
por actuación secuencial hasta la posición final por hardware sirve para programar por teach-in las
posiciones finales por software o el punto cero del proyecto. Al hacerlo es posible que realmente se
desee alcanzar el tope.
Cuadro general de los parámetros involucrados (� Sección C.2)
Parámetrosinvolucrados
Descripción PNU 1)
Velocidad lenta en operación por actuación secuencial2) 530
Velocidad máxima en operación por actuación secuencial2) 531
Aceleración en operación por actuación secuencial 532
Deceleración en operación por actuación secuencial 533
Duración de marcha lenta en ms en operación por actuación secuencial 534
Carga útil en operación por actuación secuencial 536 / 605 1)
Inicio (FHPP) CPOS.JOGP = Flanco ascendente: Actuación secuencial positiva (hacia valoresefectivos mayores)CPOS.JOGN = Flanco ascendente: Actuación secuencial negativa (hacia valoresefectivos menores)
Acuse derecibo (FHPP)
SPOS.MOV = 1: El accionamiento se mueveSPOS.MC = 0: Orden de posicionamiento activa
1) Dependiendo de la parametrización se utiliza el valor predeterminado global (� Sección 5.3).
2) La relación de las velocidades entre sí no está limitada. PNU 531 puede ser igual o menor que PNU 530.
Tab. 3.17 Parámetros involucrados en la operación por actuación secuencial
Los valores nominales transmitidos a los datos I/O no influyen en la actuación secuencial.

3 Funciones del accionamiento
82 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
3.2.6 Programación tipo teach-inLos valores siguientes pueden programarse por teach-in:
– Valores nominales en la tabla de frases (modo de frase),
– Punto cero del proyecto y posiciones finales por software (puesta a punto).
1
0
ConfirmaciónSPOS.TEACH
Programar valorpor teach-in CPOS.TEACH
1
0
1 2 3 4
1 Unidad de control de nivel superior: Prepararprogramación teach-in, aceptar número defrase/destino teach-in
2 CMAX: Listo para programación teach-in
3 Unidad de control de nivel superior:Programar por teach-in ahora, aceptar valorefectivo actual
4 CMAX: Valor aceptado
Fig. 3.13 Handshake con programación tipo teach-in
Desarrollo del valor nominal en la tabla de frases
Los valores de posición o de fuerza pueden programarse por teach-in. Al hacerlo se sobrescriben los
valores nominales existentes. El tipo se determina mediante el modo de control en el byte de control de
frase 1 (RCB1.COM1, RCB1.COM2).
1. Ajustar modo de frase (CCON.OPM2 = 0 + CCON.OPM1 = 0).
– El número de frase (datos de salida del control, byte 3) debe activarse en la frase que se desea
programar por teach-in. El número de frase se acepta con el flanco ascendente en CPOS.TEACH.
– Para programar un valor de fuerza por teach-in, el modo de control debe estar activado en fuerza
en el byte de control de frase 1 (RCB1.COM1 = 1 + RCB1.COM2 = 0).
2. El actuador se coloca en la posición deseada mediante la operación por actuación secuencial, el
posicionamiento o de manera manual (desplazándolo a mano en el estado “Actuador bloqueado”).
3. La programación tipo teach-in se realiza a través del handshake de los bits CPOS.TEACH y
SPOS.TEACH (� Fig. 3.13).
Notas:– El accionamiento no debe hallarse inmovilizado para la programación teach-in. Sin
embargo, una velocidad de 1 m/s significa que la posición actual cambia 1 mm cadamilisegundo. Con los tiempos de ciclo usuales de la unidad de control de nivelsuperior + bus de campo + CMAX se producen imprecisiones de varios milímetrosincluso a una velocidad de solo 0,1 m/s.
– El valor nominal puede programarse por teach-in incluso con una frase bloqueada.– Si se programa por teach-in el valor nominal de una frase no inicializada, se inicializará
la frase nueva correspondiente y se le asignarán valores predeterminados. En estecaso se programa básicamente la posición.
– Solo se programan valores nominales absolutos. Por eso, al programar por teach-in,en el byte de control 1 de la frase programada se activa el bit RCB1.REL = 0.

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 83
Desarrollo del punto cero del proyecto y de las posiciones finales por softwareEstos valores solo pueden programarse por teach-in en el modo “Puesta a punto”. La unidad de control
de nivel superior debe comunicar el contenido de la programación al CMAX en el parámetro nominal 1
(byte 4) como destino de teach-in
1. Ajustar el modo Puesta a punto (CCON.OPM2 = 1 + CCON.OPM1 = 0).
2. La última función de la puesta a punto (p. ej., identificación) debe haber finalizado. La programación
por teach-in mientras está activa una función de la puesta a punto no está permitida y origina un
mensaje de error.
3. El actuador se coloca en la posición deseada mediante la operación por actuación secuencial, el
posicionamiento o de manera manual (desplazándolo a mano en el estado “Accionamiento bloqueado”).
Nota: Durante la actuación secuencial pueden sobrepasarse las posiciones finales por software. Fuera de
las posiciones finales por software el accionamiento se desplaza únicamente a velocidad lenta.
4. Introducir el destino de teach-in en los datos de salida del control; el número de función (byte 3) se
ignora.
Datos I/O: Puesta a punto, función Programación tipo teachDatos Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Datos O CCON CPOS Función Parameter 1:
Destino
teach-in
= 0
Datos I SCON SPOS Función Valor efectivo
secundario:
Destino
teach-in
Valor efectivo principal
Destino programado (byte 4)Valor Afecta a PNU Se programa por teach-in
3 500:01 Punto cero del proyecto
4 501:01 Posición final inferior por software
5 501:02 Posición final superior por software
5. La programación tipo teach-in se realiza a través del handshake de los bits CPOS.TEACH y
SPOS.TEACH (� Fig. 3.13).
El destino de teach-in válido se señala con acuse de recibo en el byte 4 de los datos de entrada
(valor efectivo secundario) a partir de la detección con el flanco ascendente en CPOS.TEACH. Si el
valor efectivo secundario está configurado como número de error actual (PNU 523:03/07) el
destino de teach-in se señala con acuse de recibo en el byte 3 (en lugar de la función).
3 Funciones del accionamiento
84 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Notas:
– El accionamiento debe estar en reposo durante la programación tipo teach-in.
– Al programar el punto cero del proyecto por teach-in, la posición real indicada se
cambia a saltos.
– Mientras CPOS.TEACH = 1, el CMAX no acepta ningún flanco de inicio. Es decir,
durante la programación tipo teach-in no puede iniciarse ninguna función. Sin
embargo, la actuación secuencial está permitida.
– El acuse de recibo del destino de teach-in (byte 3 o byte 4 de los datos de entrada, ver
arriba) se desactiva en los siguientes casos:
– Flanco ascendente en CPOS.TEACH
– Flanco ascendente en CPOS.START
– Cambio del modo de funcionamiento (CCON.OPM1/CCON.OPM2)
– Al programar por teach-in las posiciones finales por software, asegurarse de que la
posición final superior por software sea siempre mayor que la posición final inferior. Si
no es así, se genera el error E44 y el valor programado no se transmite.
Recomendación:
Programar primero la posición final superior y después la inferior. Si todavía no se ha
programado ninguna posición final por software, también puede programarse primero
las posición final inferior por software. El CMAX activa automáticamente la posición
final superior por software en la posición final superior por hardware.
Errores y advertencias típicos durante la programación tipo teach-in
N.° Tipo Causa
w35 Posición real fuera de
la posición final por
software
En la programación tipo teach-in se ha sobrepasado una posición fin
por software.
E44 no es posible
programar por
teach-in
No es posible ejecutar la programación tipo teach-in.
Causas: � Sección 4.2.4, Causas del error E44.
Información adicional en la memoria de diagnosis � Sección 4.3.3.
E46 No está permitido
iniciar durante la
programación tipo
teach-in
Modo de funcionamiento Puesta a punto: Mientras CPOS.TEACH = 1
no es posible iniciar ninguna de las funciones de la puesta a punto.
Motivo: Tanto la función de programación tipo teach-in como la
función de la puesta a punto utilizan el parámetro 1.
3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 85
3.3 Modo de frase
En el estado “Funcionamiento habilitado” puede iniciarse una frase. Esta función se utiliza
generalmente para:
– el arranque de cualquier frase de la lista de frases por medio de la unidad de control de nivel
superior
– procesar un perfil de desplazamiento mediante encadenamiento de frases
– posiciones de destino conocidas que raramente cambian (cambio de formulación)
Funciones de regulaciónLa Tab. 3.18 muestra las funciones de regulación admitidas en el modo de frase.
Función del regulador Se admite
Posicionamiento PTP (punto a punto) Sí
Posicionamiento continuo, funcionamiento de seguimiento No
Regulación de fuerza PTP (punto a punto) Sí
Regulación continua de fuerza No
Conmutación flotante del valor nominal (orden de posicionamiento nueva antes de MC) Sí
Tab. 3.18 Funciones de regulación admitidas
Cuadro general de los parámetros involucrados (� Sección C.2)
Parámetrosinvolucrados
Descripción PNU1)
Todos los parámetros de los datos de frase
(� Sección 3.3.2, Tab. 3.20)
401 ... 412
Valores predeterminados, dependen de PNU 403 600 ... 608
Inicio (FHPP) CPOS.START = Flanco ascendente: Inicio
El referenciado y la actuación secuencial tienen prioridad.
Acuse de recibo(FHPP)
SPOS.ACK = Flanco ascendente: Confirmación de inicio
SPOS.MC = 0: Motion Complete, orden de posicionamiento activa
1) Dependiendo de la parametrización, en lugar de los datos de frase de PNU 406 ... 412 se utilizan los valores predeterminados
globales de PNU 600 ... 608 (� Sección 5.3).
Tab. 3.19 Parámetros involucrados en el modo de frase
La cantidad máxima de frases depende de la versión de firmware:
– hasta versión 2.2: 64
– a partir de versión 2.3: 128

3 Funciones del accionamiento
86 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
3.3.1 Inicio de una frase
N.º de frase nominal datos de salida
Confirmación deinicio SPOS.ACK
Motion CompleteSPOS.MC
N.º de frase real datos de entrada
N - 1 N N + 1
1
0
1
0
1
0
1
0
InicioCPOS.START
N - 1 N
1
0
tmín
tmín: Tiempo de espera mínimo de 1 ciclo de bus. Recomendación: 1 ciclo decontrol. No es necesario si se utiliza una transmisión de datos consistente
1 2 3 4 5 6 7
1 Ajuste el número de frase deseado en los datos de salida del control. Hasta el arranque, el CMAXsigue respondiendo con el número de la última frase ejecutada.SCON.FAULT debe ser 0 durante todo el proceso.
2 Cuando SPOS.ACK (confirmación de inicio) es = 0, el control puede activar la ejecución de la frasecon un flanco ascendente en CPOS.START.
3 El CMAX recibe el número de frase e inicia la orden de posicionamiento, es decir, la curva de valornominal. En los datos de entrada del control se activa el número de frase real de la frase actual y sedesactiva SPOS.MC.
4 El CMAX de motor señaliza con el flanco ascendente en SPOS.ACK que los datos de salida delcontrol han sido aceptados y que la orden de posicionamiento está activa.
5 El control detecta la confirmación SPOS.ACK = 1 en sus datos de entrada y desactiva CPOS.STARTen sus datos de salida.
6 El CMAX confirma la desactivación de CPOS.START con la desactivación de SPOS.ACK.7 Tras haber detectado SPOS.ACK = 0, el control puede escribir los datos nominales nuevos en sus
datos de salida. El CMAX los ignora hasta el siguiente inicio. Cuando la frase o el encadenamiento de frases ha finalizado se activa SPOS.MC.
Fig. 3.14 Secuencia de inicio de frase

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 87
Notas– En cuanto el control detecta el flanco ascendente en SPOS.ACK, puede suponer que el MC es válido.
Desde la perspectiva del control, el flanco descendente en MC puede ocurrir al mismo tiempo que el
flanco ascendente en ACK. En ese caso, los puntos 3 y 4 no se diferencian.
– Si hay mensajes de error es posible que la orden de posicionamiento no se confirme con SPOS.ACK
(depende del error). Por tanto, siempre debe evaluarse adicionalmente el bit SCON.FAULT.
Causas típicas de errores en las aplicaciones– El referenciado no se ha ejecutado.
– Se ha seleccionado un número de frase no válido o una frase no inicializada.
– El valor nominal está fuera de las posiciones finales por software.
– Error en los parámetros de frase, p. ej., una condición de conmutación progresiva inadmisible
(� Sección 3.3.3).
– Frase siguiente no inicializada en la conmutación progresiva de frases.
– Si la frase siguiente está configurada con el perfil automático, solo son admisibles las condiciones
MC (o ninguna). De lo contrario se genera una advertencia (W37) y se utiliza el perfil libre.
– El CMAX no responde al flanco ascendente en CPOS.START:
Debe comprobarse si SPOS.ACK realmente estaba desactivado. Cuando el control ha activado
CPOS.START = 0 (Fig. 3.14 6 ), debe esperar a SPOS.ACK = 0 (Fig. 3.14 7 ). De lo contrario puede
suceder que el tiempo para CPOS.START = 0 sea demasiado breve para ser detectado por el CMAX.
Notas sobre la regulación de fuerzaSi se produce un flanco ascendente en CPOS.START en RCB1 estando ajustado como modo de control
“Regulación de fuerza”, el CMAX interpreta el valor objetivo predeterminado como un valor de fuerza.
Este activa la regulación de fuerza y equilibra el valor con la rampa parametrizada � Sección 3.1.2.

3 Funciones del accionamiento
88 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
3.3.2 Estructura de la fraseUna orden de posicionamiento en el modo de frase se describe con una frase de parámetros y valores
nominales. Cada parámetro o valor nominal es direccionado por su propio PNU. Una frase se compone
respectivamente de los PNUs con el mismo subíndice (� Tab. 3.21).
PNU 1) Nombre Control de posición Regulación de fuerza
401 Byte de control de
frase 1
RCB1
Ajuste para orden de posicionamiento:
Absoluto/relativo, control de posición/fuerza, etc.
402 Byte de control de
frase 2
RCB2
Control de frase: Ajustes para la conmutación progresiva de frases
condicional
403 Valores
predeterminados
Controla la utilización de valores predeterminados globales
404 Valor nominal Valor nominal de posición valor nominal de fuerza
405 Valor preseleccionado Valor preseleccionado para conmutación progresiva de frases
conforme a RCB2
406 Velocidad Velocidad
407 Aceleración Aceleración No utilizada
408 Retardo Retardo No utilizada
410 Carga útil Carga útil
411 Tolerancia Tolerancia de posicionamiento Tolerancia de fuerza
412 Rampa de fuerza No utilizada Rampa de fuerza
1) Los valores predeterminados globales se utilizan en función de PNU 403 (valor predeterminado de frase) (� Tab. 3.19).
Tab. 3.20 Parámetros de una frase
N.ºde
frase
PNURCB1 RCB2 Es
pecific
ación
Valor
nominal
Presele
cción
Veloci
dad
Acele
ración
Decel. Carga
útil
Toleran
cia
Rampa
de
fuerza
1 401:01 402:01 403:01 404:01 405:01 406:01 407:01 408:01 410:01 411:01 412:01
2 401:02 402:02 403:02 404:02 405:02 406:02 407:02 408:02 410:02 411:02 412:02
... ... ... ... ... ... ... ... ... ... ... ...
128 401:128 402:128 403:128 404:128 405:128 406:128 407:128 408:128 410:128 411:128 412:128
Tab. 3.21 Estructura de la tabla de frases

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 89
3.3.3 Conmutación progresiva de frases / encadenamiento de frases condicional (PNU 402)El modo de frase permite encadenar varias órdenes de posicionamiento. Ello significa que mediante un
flanco ascendente en CPOS.START se pueden ejecutar varias frases consecutivamente de forma
automática. De esta forma se puede definir un perfil de desplazamiento para, p. ej., cambiar a otra
velocidad una vez alcanzada una posición.
Para ello, activando una condición (decimal) en RCB2 se define que tras la frase actual se ejecute
automáticamente la frase siguiente N + 1. Con la condición suele estar vinculado un valor numérico,
p. ej., la posición de conmutación progresiva. Este valor se determina en PNU 405 (valor
preseleccionado).
Motion Complete (SPOS.MC) se activa después de ejecutarse la última frase. Si la condición MC se
alcanza antes de cumplirse la condición de conmutación progresiva, la cadena de frases se interrumpe
y se activa SPOS.MC. En este caso, el bit 3 se activa en el byte de estado de frase (RSB.RCE) y se emite
un error.
No está autorizada una conmutación progresiva de frases en la última frase admisible de la lista de
frases.
La conmutación puede suprimirse activando el bit B7. En este caso, el CMAX ejecuta la frase
direccionada sin mensaje de error. Sin embargo, la conmutación progresiva se ignora y la frase
siguiente no se ejecuta.
Esta función no está prevista para el funcionamiento normal (funciones de depuración con FCT).
Byte de control 2 de la frase (PNU 402)
Bits 0 ...
6
Valor numérico 0...128: Condición de conmutación progresiva como enumeración
(� Tab. 3.24)
Bit 7 = 0: Conmutación progresiva de frases (bits 0...6) no bloqueada (valor
predeterminado)
= 1: Conmutación progresiva de frases bloqueada
Tab. 3.22 Ajustes para la conmutación progresiva de frases condicional
Señales importantes de la conmutación progresiva de frases
Señal Descripción
CPOS.START Inicio de la primera frase del encadenamiento
SPOS.MC Motion Complete: Fin de la cadena de frases
RSB.RC1 Primera frase ejecutada: Después de la primera conmutación progresiva se activa el
bit 0 en el byte de estado de frase (RSB)
RSB.RCC Todas las frases ejecutadas: Todas las conmutaciones progresivas de frases
parametrizadas se han ejecutado hasta el final. Para comprobar que se han procesado
completamente las conmutaciones progresivas de frases se recomienda realizar una
evaluación de RSB.CCC al final del posicionamiento (con SPOS.MC = 1).
RSB.RCE Error en la conmutación progresiva de frases: Se ha parametrizado una conmutación
progresiva de frases que todavía no ha podido ejecutarse.
Tab. 3.23 Señales de la conmutación progresiva de frases condicional

3 Funciones del accionamiento
90 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Caso especial: Conmutación entre fuerza y posiciónEn el caso de una conmutación progresiva de frases con conmutación de regulación de fuerza a control
de posición, primero se detiene el accionamiento. Esto es necesario para poder eliminar las fuerzas
aplicadas.
Solo después es posible un desplazamiento hacia la nueva posición de destino.
Limitación: Conmutación a una frase con perfil automático
Solo es posible realizar una conmutación progresiva a una frase con perfil automático con
la condición de conmutación progresiva 12 “MC”.
Si se conmuta a una frase con perfil automático con una condición que no sea “MC”, se
genera una advertencia (W37) durante la ejecución y se utiliza el perfil libre. Para la
velocidad, aceleración y deceleración se utilizan los valores predeterminados
(PNU 600/602/603).

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 91
Condiciones de conmutación progresiva definidas en el CMAXValor Condición Descripción
0 – Ninguna conmutación progresiva.
1 – Reservado
2 Posición El valor preseleccionado seinterpreta como valor deposición 1.La conmutación progresiva serealiza en cuanto la posición realactual alcanza o supera el valorpreseleccionado 2 en el sentidode la marcha.
2
1
MC
Velocidad Posición
3 Fuerza El valor preseleccionado seinterpreta como valor defuerza 1.La conmutación progresiva seefectúa si la fuerza real actual hasuperado el valorpreseleccionado 2.No es necesario que la primeraorden sea una orden de fuerza.Ejemplo: Posicionamiento lentosobre el bloque. Al alcanzar elumbral de fuerza se conmuta aregulación de fuerza.
2
1
MC
Velocidad
Fuerza
Notas:– Sobrepasar significa que la fuerza real se aproxima más a la fuerza objetivo
que el valor de conmutación.– En caso de conmutación desde una orden de posición: Exceptuando la
fuerza antagónica esperada, la fuerza para acelerar la carga de masa y elrozamiento del sistema determina también el valor actual de fuerza y, portanto, la posición de conmutación. Por ello, en este caso debe esperarseuna repetibilidad reducida de la posición de conmutación. La conmutaciónprogresiva proporciona un comportamiento relativamente repetitible solocuando el eje, p. ej., se posiciona contra una fuerza elástica del muelle y lafuerza resultante sobrepasa como mínimo el doble de las fuerzas derozamiento incluyendo la fuerza de aceleración.

3 Funciones del accionamiento
92 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Condiciones de conmutación progresiva definidas en el CMAX
Valor DescripciónCondición
4 Reposo El valor preseleccionado seinterpreta como tiempo T1 1.Conmutación progresiva: Elactuador se desplaza lentamentehasta la posición desconocida dela pieza a mecanizar 2 (“sobre elbloque”) y se para en eselugar 3.Al alcanzar el reposo se inicia eltiempo T1. Una vez finalizado, seejecuta la frase siguiente 4. Si el actuador no se muevedurante los 100 ms siguientes alinicio de la frase (p. ej., porque yaestá sobre el bloque), se detectacomo reposo y empieza el tiempoT1.
2
1MC
Velocidad
Posición depieza
Posición
El accionamiento se mueve
43
Notas:– Para evitar un timeout, el tiempo de timeout configurado en esta frase se
prolonga el tiempo T1.– Si se ha detectado un reposo, al finalizar el tiempo se realiza siempre una
conmutación progresiva incluso si el eje se mueve de nuevo (no hay tiempode supervisión).
– El eje puede estar en reposo debido no solo a un obstáculo (deseado oindeseado), sino, p. ej., por haber una presión demasiado baja.
– Al conmutar desde una orden de fuerza: Como la rampa de fuerzacontribuye a determinar el punto de conmutación de la fuerza en reposo,debe esperarse una repetibilidad reducida de la posición y del valor defuerza.
5 Tiempo El valor preseleccionado seinterpreta como tiempo T1 1.El tiempo T1 empieza a partir delinicio de la frase.Una vez transcurrido ese tiempo, seconmuta a la frase siguiente 2.Para ello, MC no puede habersealcanzado todavía.
2
1MC
Velocidad Posición
6 ...10
– Reservado

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 93
Condiciones de conmutación progresiva definidas en el CMAX
Valor DescripciónCondición
11 Carrera El valor preseleccionado seinterpreta como carrera 1(diferencia de posición, provistade signo). La carrera toma comoreferencia la última posición dedestino y no la última posiciónreal alcanzada en el últimoposicionamiento.La conmutación 2 se realiza alalcanzar la carrera indicada.Si la frase actual ya se ha iniciadoa través del encadenamiento, elvalor preseleccionado toma comoreferencia la posición deconmutación.Al iniciar la frase sin un MCanterior, el valor preseleccionadotoma como referencia la posicióninicial.
2
1
MC
Posición de destino
Posición
Velocidad
12 MC El valor preseleccionado contieneun tiempo de espera T1 1 enmilisegundos.El tiempo de espera empieza alalcanzarse el valor objetivo, esdecir, cuando se cumple lacondición MC. La conmutaciónprogresiva se realiza al finalizareste tiempo de espera 2.Durante el posicionamiento, engeneral el eje está en un reposodurante un momento, pero en laregulación de fuerza nonecesariamente.
2
1
MC
PosiciónVelocidad
Nota:– Con esta condición de conmutación progresiva, SPOS.MC no se activa con 1
durante el procesamiento de la frase, sino cuando el CMAX ha ejecutado laúltima frase encadenada.

3 Funciones del accionamiento
94 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Condiciones de conmutación progresiva definidas en el CMAX
Valor DescripciónCondición
13 Carrera enfunción dela fuerza
La conmutación progresiva soloestá permitida en una frase defuerza.El valor preseleccionado seinterpreta como carrera 1(diferencia de posición, provistade signo).Al alcanzar la condición MC para laorden de fuerza 2 se inicia unasupervisión de la posición real. Laconmutación progresiva 3 seefectúa en cuanto se sobrepasa lacarrera ajustada 1 en el valorpreseleccionado.La indicación de carrera en el valorpreseleccionado se refiere a laposición real respecto almomento en que se alcanza lacondición MC para la tarea defuerza 2 .
2
1
MC
Fuerzaobjetivo
Posición
Posiciónde destino
3Control activo
Fuerza
Notas:– En ocasiones es difícil reproducir la posición y la posición absoluta no suele
ser conocida ni visible porque no se emite la posición en el momento en quese alcanza la condición MC.
– El sentido de la carrera debe coincidir con el sentido de actuaciónpredeterminado de la fuerza. De lo contrario, se emite un mensaje dediagnosis (W27/E27).
– Si se infringe el control de la carrera o de la velocidad, la frase deposicionamiento actual finaliza y no se efectúa una conmutación progresivade frases.
– Al alcanzarse la condición MC para la orden de fuerza, empieza a transcurrirel tiempo de timeout (regulación de fuerza, PNU 1163). Si la carrera no sealcanza dentro del tiempo de timeout, la frase de posicionamiento actualfinaliza, no se efectúa una conmutación progresiva de frases, SPOS.MC yRSB.RCE se activan con 1 y se emite un mensaje de diagnosis (W28/E28).
– Si el tiempo de timeout de la regulación de fuerza se desactiva (se poneen 0), el accionamiento espera continuamente a que se alcance la posiciónde conmutación.

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 95
Condiciones de conmutación progresiva definidas en el CMAX
Valor DescripciónCondición
14 Posicióncon fuerza
La conmutación progresiva soloestá permitida en una frase defuerza.El valor preseleccionado seinterpreta como valor deposición 1.La conmutación progresiva seefectúa en cuanto la posición realactual alcanza o sobrepasa elvalor preseleccionado,independientemente de si lacondición MC para la orden defuerza ya se ha alcanzado(caso 3 , señales de líneacontinua) o no (caso 2 , señalesde línea discontinua).
2
1
MC
Fuerzaobjetivo
Posición
Posiciónde destino
3
FuerzaPosición deconmutación
Notas:– El sentido de la posición de conmutación respecto a la posición inicial debe
coincidir con el sentido de actuación predeterminado de la fuerza. De locontrario, se emite un mensaje de diagnosis (W27/E27).
– Si se infringe el control de la carrera o de la velocidad, la frase deposicionamiento actual finaliza y no se efectúa una conmutación progresivade frases.
– Al alcanzarse la condición MC para la orden de fuerza, empieza a transcurrirde nuevo el tiempo de timeout (regulación de fuerza, PNU 1163). Si laposición de conmutación no se alcanza dentro del tiempo de timeout, lafrase de posicionamiento actual finaliza, no se efectúa una conmutaciónprogresiva de frases, SPOS.MC y RSB.RCE se activan con 1 y se emite unmensaje de diagnosis (W28/E28).
– Si se desactiva el tiempo de timeout de la regulación de fuerza (se poneen 0), el accionamiento espera continuamente a la conmutación progresivade frases.
15 ...128
– Reservado
Tab. 3.24 Condiciones de conmutación progresiva
3 Funciones del accionamiento
96 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
3.4 Modo directo
En el estado “Funcionamiento habilitado”, con el modo directo se transmite e inicia una orden de
posicionamiento directamente en los datos I/O que se transfieren desde el nodo de bus (p. ej. a través
del bus de campo). Los valores nominales se guardan en la unidad de control de nivel superior.
Aplicaciones típicas
La función se utiliza en las siguientes situaciones:
– Desplazamiento a cualquier posición dentro de la carrera útil.
– Las posiciones de destino son desconocidas durante la planificación o se alteran frecuentemente
(p. ej., muchas posiciones diferentes de la pieza a mecanizar).
– No es necesario un perfil de desplazamiento mediante el encadenamiento de frases.
– El accionamiento debe seguir continuamente un valor nominal.
– Las posiciones nominales deben guardarse en la unidad de control de nivel superior por otra razón.
Causas típicas de errores en las aplicaciones
– No se ha ejecutado el referenciado
– La posición o la fuerza de destino no pueden alcanzarse o están fuerza de las posiciones finales por
software
– Timeout (posición de destino o fuerza objetivo no alcanzada) � Sección 3.4.2
Funciones de regulaciónLa Tab. 3.25 muestra las funciones de regulación admitidas en el modo directo.
Función del regulador Se admite
Posicionamiento PTP (punto a punto) Sí
Posicionamiento continuo, funcionamiento de seguimiento Sí
Regulación de fuerza PTP (punto a punto) Sí
Regulación continua de fuerza No
Conmutación flotante del valor nominal (orden de posicionamiento nueva antes
de MC)
Sí
Tab. 3.25 Funciones de regulación admitidas

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 97
Limitación de los valores nominalesEl valor nominal principal se limita a las posiciones finales por software o hardware, la limitación de
fuerza ajustada o la fuerza máxima alcanzable calculada. Si se exceden los límites permitidos se emite
un error.
El valor nominal secundario se limita a 0 % ... 100 % y al margen de valores máximo permitido del
parámetro básico correspondiente (� Tab. 3.26). Si se exceden los límites permitidos del valor nominal
secundario no se emite ningún error.
Nota: Cuando el valor nominal secundario está configurado como velocidad o rampa de
fuerza, si por equivocación se especifica 0 la orden de posicionamiento se ejecutará con
una velocidad o rampa de fuerza mínima.
Cuadro general de los parámetros involucrados (� Sección C.2)
Parámetrosinvolucrados
Descripción PNU1)
Control de posición Valor básico de la velocidad2) 600 / 540
Aceleración en modo directo 602 / 541
Deceleración en modo directo3) 603 / 542
Carga útil2) 605 / 544
Tolerancia 606 / 545
Regulación de fuerza Valor básico de la rampa de fuerza2) 608 / 550
Carga útil2) 605 / 551
Tolerancia de fuerza 607 / 552
Limitación de la velocidad en la regulación de fuerza 601 / 554
Inicio (FHPP) CPOS.START = Flanco ascendente: Inicio
CDIR.REL = Valor nominal absoluto/relativo
CDIR.COM1/CDIR.COM2 = Modo de control (� Sección 2.2.4)
CDIR.CONT = Seguimiento continuo
La actuación secuencial y el referenciado tienen prioridad
Acuse de recibo(FHPP)
SPOS.MC = 0: Motion Complete, orden de posicionamiento activa
SPOS.ACK = Flanco ascendente: Confirmación de inicio
1) Dependiendo de la parametrización se utilizan los valores predeterminados de PNU 600 ... 608 o los valores básicos de
PNU 540 ... 554 (� Sección 5.3).
2) La unidad de control de nivel superior transfiere al valor nominal secundario un valor porcentual que debe multiplicarse por el
valor básico para obtener el valor nominal definitivo.
3) En caso de especificación de valor nominal continua (modo de seguimiento) no se tiene en cuenta la deceleración; el valor
predeterminado para la aceleración se utiliza también para la deceleración.
Tab. 3.26 Parámetros involucrados en el modo directo

3 Funciones del accionamiento
98 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
3.4.1 Inicio de una orden de posicionamiento
Valor nominal principalEn el valor nominal principal se predetermina un valor nominal de posición o de fuerza en función del
modo de regulación seleccionado. El valor nominal puede ser absoluto o relativo.
Con valor nominal principal “Posición nominal y fuerza nominal”, solamente se tiene en cuenta el valor
nominal del modo de regulación actual, se ignora el otro valor nominal.
Valor nominal secundario
Dependiendo de la configuración (PNU 523:01, :05), como valor nominal secundario se predetermina la
velocidad, la rampa de fuerza o la carga útil. En el valor nominal secundario se predetermina también
un valor porcentual que influye en el valor básico correspondiente (� Tab. 3.26). El valor nominal
secundario se acepta solo en el inicio (flanco ascendente en CPOS.START), las modificaciones sin un
nuevo flanco ascendente en CPOS.START se ignoran.
Los valores no transmitidos en el valor nominal secundario de velocidad, rampa de fuerza o carga útil se
utilizan al 100 % del valor básico.
Cuando el valor nominal secundario está configurado como velocidad o rampa de fuerza, hay que ase
gurarse de no transmitir por error un 0, de lo contrario el eje se desplaza muy lentamente o con un
rampa de fuerza muy pequeña.
Con valor nominal principal “Posición nominal y fuerza nominal” y valor nominal secundario “Velo
cidad”, la velocidad solo se utiliza en el control de posición; en el control de fuerza se ignora el valor
nominal secundario.
Inicio de una orden de posicionamiento
La Fig. 3.15 muestra las señales I/O durante el inicio de una orden de posicionamiento.

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 99
tmín
tmín: Tiempo de espera mínimo de 1 ciclo de bus. Recomendación: 1 ciclo decontrol. No es necesario si se utiliza una transmisión de datos consistente.
Valores nominales datos de salida
InicioCPOS.START (B1)
Confirmación inicioSPOS.ACK (B1)
Motion CompleteSPOS.MC (B2)
N - 1 N N + 1
1
0
1
0
1
0
1
0
N + 2
4321
1 En los datos de salida del control se ajustan el valor nominal deseado (posición, fuerza) y lacondición de posicionamiento (absoluta/relativa, velocidad o rampa de fuerza, etc.). SCON.FAULT debe ser 0 durante todo el proceso.
2 Con el flanco ascendente en CPOS.START, el CMAX acepta los valores nominales existentesactualmente, inicia la orden de posicionamiento, ajusta SPOS.MC = 0 y confirma el flanco deinicio con SPOS.ACK = 1.
3 Después de desactivar CPOS.START y de confirmar SPOS.ACK = 0 es posible iniciar un valornominal nuevo en cualquier momento. No hay que esperar a MC. El CMAX calcula de manera interna los pasos necesarios para ejecutar la nueva orden deposicionamiento. Si se requiere invertir el sentido, el accionamiento se frena primero hastaalcanzar una velocidad = 0. La posición nominal no se transmite al controlador hasta esemomento. No se genera ningún mensaje de error.
4 Cuando se ha alcanzado el último valor nominal (posición, fuerza) , se ajusta SPOS.MC = 1.
Fig. 3.15 Inicio de la orden de posicionamiento
La secuencia de los bits de control y de estado restantes se comporta conforme al modo
de frase (� Sección 3.3.1, Fig. 3.14).
Notas:
– En cuanto el control detecta el flanco ascendente en SPOS.ACK, puede suponer que el MC es válido.
Desde la perspectiva del control, el flanco descendente en SPS.MC puede ocurrir al mismo tiempo
que el flanco ascendente en SPOS.ACK.
– Si hay mensajes de error es posible que la orden de posicionamiento no se confirme con SPOS.ACK.
Por tanto, siempre debe evaluarse adicionalmente el bit SCON.FAULT.
3 Funciones del accionamiento
100 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
3.4.2 Especificación continua del valor nominal (funcionamiento de seguimiento)Con la especificación continua del valor nominal, el control puede transmitir valores nominales al CMX
en cualquier momento. El funcionamiento de seguimiento solo está permitido con control de posición;
los valores nominales solo pueden predeterminarse como valores absolutos (CDIR.REL = 0).
Valor nominal principalEn el valor nominal principal, a partir del inicio se pueden predeterminar nuevas posiciones nominales
mientras esté ajustado CPOS.START = 1, p. ej. periódicamente cada 10 milisegundos o en intervalos
irregulares de 10 ms – 30 ms – 2 s – 10 ms – 30 ms – 20 ms – 15 ms – 10 ms etc. Los valores nominales
pueden ser absolutamente indistintos, tanto para la longitud de carrera como para el sentido del
movimiento.
Valor nominal secundarioDependiendo de la configuración (PNU 523:01), como valor nominal secundario se predetermina la
velocidad o la carga útil. En el valor nominal secundario se predetermina también un valor porcentual
que influye en el valor básico correspondiente (valor básico de velocidad, PNU 600/540, o bien en el de
carga útil, PNU 605/544; � Tab. 3.26). El valor nominal secundario se acepta solo en el inicio (flanco
ascendente en CPOS.START), las modificaciones sin un nuevo flanco ascendente en CPOS.START se
ignoran.
Si el valor nominal secundario está configurado como velocidad o rampa de fuerza, para la carga útil se
utiliza el 100 % del valor básico. En este caso es necesario asegurarse de no transmitir por descuido un
0 al valor nominal secundario, de lo contrario el eje se desplaza muy lentamente.
Si el valor nominal secundario está configurado como velocidad o rampa de fuerza, para la carga útil se
utiliza el 100 % del valor básico.
Iniciar especificación continua de valor nominalCon un flanco ascendente en CPOS.START se aceptan todos los valores nominales. Entonces el CMAX
calcula internamente una trayectoria, cuya velocidad y aceleración están limitadas a los valores
máximos de la velocidad (valor secundario nominal, o PNU 600/540) y de la aceleración
(PNU 602/541).
Con la especificación continua de valor nominal, los valores de aceleración también se utilizan para la
deceleración; otros valores de aceleración (PNU 603/542) no se tienen en cuenta.
Por tanto, si es necesario predeterminar una aceleración y una deceleración concretas
para el posicionamiento punto a punto, debe utilizarse la orden de posicionamiento
normal en el mudo directo.
La Fig. 3.16 muestra las señales I/O durante el inicio de una orden de posicionamiento con
especificación continua del valor nominal.

3 Funciones del accionamiento
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 101
Valor nominal datos de salida
InicioCPOS.START
Confirmación deinicio SPOS.ACK
Motion CompleteSPOS.MC
N - 1 N N + 201
0
1
0
1
0
1
0
N + 21
Especificación continua del valor nominal activa
N + 1 N + 19
1 2 3 4
1 En los datos de salida del control, ajustar la posición nominal deseada en el valor nominalprincipal y la velocidad o la carga útil en el valor nominal secundario.
2 Cuando SPOS.ACK = 0 y SPOS.MC = 1, 1 , el control puede iniciar el modo de valor nominalcontinuo con el flanco ascendente en CPOS.START 2 . El CMAX acepta los valores nominalesexistentes actualmente, inicia la orden de posicionamiento, ajusta SPOS.MC = 0 y confirma elflanco de inicio con SPOS.ACK = 1.
3 Mientras CPOS.START = 1, en todo momento se puede modificar el valor nominal. El CMAX sigue ala posición del eje conforme al valor nominal, la velocidad y la aceleración se limitan según losvalores básicos de Tab. 3.26.
4 Con un flanco descendente en CPOS.START 3 concluye el seguimiento del valor nominal 4 , elaccionamiento se para y se activa posición nominal = posición real.
Fig. 3.16 Inicio de la orden de posicionamiento con especificación continua del valor nominal
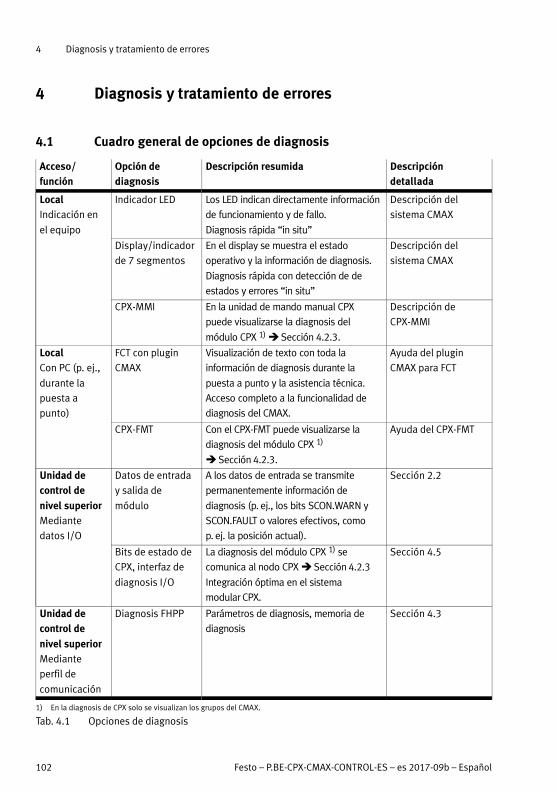
4 Diagnosis y tratamiento de errores
102 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
4 Diagnosis y tratamiento de errores
4.1 Cuadro general de opciones de diagnosis
Acceso/función
Opción dediagnosis
Descripción resumida Descripcióndetallada
LocalIndicación en
el equipo
Indicador LED Los LED indican directamente información
de funcionamiento y de fallo.
Diagnosis rápida “in situ”
Descripción del
sistema CMAX
Display/indicador
de 7 segmentos
En el display se muestra el estado
operativo y la información de diagnosis.
Diagnosis rápida con detección de de
estados y errores “in situ”
Descripción del
sistema CMAX
CPX-MMI En la unidad de mando manual CPX
puede visualizarse la diagnosis del
módulo CPX 1) � Sección 4.2.3.
Descripción de
CPX-MMI
LocalCon PC (p. ej.,
durante la
puesta a
punto)
FCT con plugin
CMAX
Visualización de texto con toda la
información de diagnosis durante la
puesta a punto y la asistencia técnica.
Acceso completo a la funcionalidad de
diagnosis del CMAX.
Ayuda del plugin
CMAX para FCT
CPX-FMT Con el CPX-FMT puede visualizarse la
diagnosis del módulo CPX 1)
� Sección 4.2.3.
Ayuda del CPX-FMT
Unidad decontrol de
nivel superiorMediante
datos I/O
Datos de entrada
y salida de
módulo
A los datos de entrada se transmite
permanentemente información de
diagnosis (p. ej., los bits SCON.WARN y
SCON.FAULT o valores efectivos, como
p. ej. la posición actual).
Sección 2.2
Bits de estado de
CPX, interfaz de
diagnosis I/O
La diagnosis del módulo CPX 1) se
comunica al nodo CPX � Sección 4.2.3
Integración óptima en el sistema
modular CPX.
Sección 4.5
Unidad decontrol de
nivel superiorMediante
perfil de
comunicación
Diagnosis FHPP Parámetros de diagnosis, memoria de
diagnosis
Sección 4.3
1) En la diagnosis de CPX solo se visualizan los grupos del CMAX.
Tab. 4.1 Opciones de diagnosis

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 103
4.2 Errores y advertencias
El CMAX monitoriza permanentemente el estado operativo y emite los mensajes de diagnosis
correspondientes en caso de divergir del estado nominal o de producirse eventos especiales.
Los mensajes de diagnosis se clasifican como error o advertencia en función de su causa o del efecto
que tengan y pueden evaluarse de manera detallada y tratarse a continuación.
Fallos Efecto Validación
ErroresEventos y estados que ponen
en peligro o impiden el
funcionamiento correcto del
CMAX.
– LED de error rojo encendido
– En la pantalla se visualiza el número de
error E...
– Se activa SCON.FAULT = 1
– Efecto en el control secuencial dependiente
del nivel de fallo � Sección 4.2.1
Necesaria
� Sección 4.2.2
AdvertenciasEventos y estados que
posiblemente podrían afectar
al funcionamiento.
– Se activa SCON.WARN = 1
– No afectan al control secuencial ni al eje
innecesario
Tab. 4.2 Errores y advertencias
Lista de errores y advertencias � Sección 4.2.4.
Algunos mensajes de diagnosis se puede clasificar con FCT o PNU 228:03 como
advertencia o error. La sección 4.2.4 muestra el nivel asignado de fábrica (p. ej. F2). Los
niveles alternativos ajustables figuran entre paréntesis. F2 (W) significa “ajuste de fábrica
nivel F2, nivel alternativo W”.
4.2.1 Efecto en el control secuencial y el eje; nivel de falloDependiendo del nivel de fallo, los errores y advertencias tienen el siguiente efecto:
Nivel de fallo Efectos en: SCON1) SPOS1)
Control secuencial Eje FAULT WARN READY ENABLED MC REF
W (advertencia) – (ninguno) – 1 – – – –
F1 (error 1) Transición al
estado “Error”
Parada 1 – 0 – 1 –
F2 (error 2) Accionamiento
bloqueado
1 – 0 0 1 –
FS (error del
sistema)
Sistema detenido por completo x x x x x x
1) Estado de bits de estado: – = no afecta; 0 = señal 0, 1 = señal 1; x = no hay actualización
Tab. 4.3 Niveles de fallo
– F1 (error 1): El eje se detiene. Comportamiento en caso de parada � Sección 3.1.4.
– F2 (error 2): Se bloquea el accionamiento (controlador inactivo), el accionamiento sigue
moviéndose con la energía residual hasta alcanzar el estado de reposo. Si se interrumpe la
comunicación con el sistema de medición de recorrido/conexión de sensores es probable que la
referencia se pierda (SPOS.REF = 0).

4 Diagnosis y tratamiento de errores
104 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
– FS (error del sistema): Es probable que los datos de I/O ya no se puedan actualizar.
Es necesario desconectar/conectar.
4.2.2 Validación de errores y advertencias; tipo de reset
Validación de errores
Los errores deben validarse con CCON.RESET antes de poder iniciar una nueva orden de
posicionamiento. En la mayoría de casos para ello debe haberse eliminado la causa del error.
1. Flanco ascendente en CCON.RESET.
2. Esperar 3 s (en función del error, el CMAX requiere como máximo 3 segundos, p. ej., para inicializar
el eje).
3. Compruebe si el error se ha eliminado:
– si SCON.FAULT = 0: Ok
– si SCON.FAULT = 1: Comprobar número de error, eliminar causa � Sección 4.2.4.
Normalmente, el CMAX intenta validar siempre todos los errores pendientes. Si hay varios errores
activos simultáneamente, el comportamiento depende del error más grave � Sección 4.2.1.
Si hay varios errores y al reiniciar puede borrarse uno de ellos pero no los otros, después del reset se
visualizará uno de los errores restantes.
Las reacciones del CMAX a la validación de distintos errores se clasifican por tipos de reset � Tab. 4.4.
Tipo dereset
Significado Acción al validar
R Reset Se abandona el estado “error”
F Reset if fixed Se abandona el estado “error” si antes se ha eliminado la
causa (ejemplo: E51 activo y se ha vuelto a aplicar la
tensión de funcionamiento).
N New initialisation and reset El CMAX inicializa de nuevo los componentes válvula y
conexión de sensores así como el controlador. Si no
vuelve a aparecer ningún error se abandona el estado
“error”.
El tiempo máximo para un nuevo arranque es de 3 s.
Después del reinicio es necesario ejecutar de nuevo el
recorrido de referencia.
Poff Reset with power off El CMAX no reacciona a la validación (CCON.RESET). Es
necesario desconectar y volver a conectar el terminal CPX
con el CMAX o ejecutar un “Reinicio del terminal CPX” en
FCT (a partir de V2.2).
Tab. 4.4 Tipos de reset
Validación de advertencias
No es necesario validad las advertencias. Con flanco ascendente en CPOS.START (nueva orden de
posicionamiento) o CCON.RESET (siempre que se haya eliminado la causa) se activa SCON.WARN = 0.

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 105
4.2.3 Representación de los números de error del CMAX en el terminal CPXLos errores y advertencias del CMAX se clasifican en grupos. La primera cifra del número de error y
advertencia indica el grupo. La segunda cifra indica el mensaje en concreto. El CMAX comunica al nodo
COX solo el grupo del mensaje. Los grupos del CMAX están asignados a los números 100 a 108 del
terminal CPX (� Descripción del sistema CPX, números de error). La última cifra del mensaje de
diagnosis indica el grupo.
Para una evaluación detallada no basta la indicación del grupo en el mensaje de
diagnosis del terminal CPX. Para ello, evaluar los números de error y advertencia a través
de los datos I/O (PNU 220, 224, ...), el plugin FCT o la pantalla.
Asignación de números de error CPX y grupos del CMAX
Error delCPX
Texto de error del CPX (MMI, software deconfiguración)
Grupo � Sección 4.2.4
100 [Configuration error] 0 Error de configuración
101 [Execution error] 1 Error de ejecución
102 [Record error] 2 Error de frase de
posicionamiento
103 [Control error] 3 Error del controlador
104 [System error A] 4 Error del sistema A
105 [System error B] 5 Error del sistema B
106 [Error in valve] 6 Error de válvula
107 [Controller error] 7 Error del controlador
108 [Encoder error] 8 Error del sistema de
medición de recorrido
Tab. 4.5 Números de error CPX y grupos del CMAX

4 Diagnosis y tratamiento de errores
106 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
4.2.4 Números de error y de advertencia
Información sobre el nivel de fallo y el tipo de reset � Secciones 4.2.1 y 4.2.2.
FCT proporciona información adicional sobre numerosos eventos de diagnosis (� FCT).
La información adicional se guarda internamente en el PNU 203 (� Sección 4.3.3).
Grupo 0 – Errores de configuraciónGrupo de errores CPX 100 (CPX-MMI: [Configuration error] )
N.º Mensaje Nivel defallo
Tipo dereset
01 La configuración nominal difiere de la configuración actualThe nominal configuration deviates from actual configuration
F2 N
Nota Para evitar errores en el conexionado de tubos se repone la prueba demovimiento. El CMAX se encuentra en estado C03. La prueba de movimientodebería ejecutarse de nuevo a continuación.
Causa Un componente del ramal de eje no coincide con lo especificado en laconfiguración nominal:– Sistema de medición de recorrido o conexión de sensores (tipo, longitud)– Cilindro (tipo, longitud, diámetro)– Tipo de válvula
Medida � Comprobar un componente. Reemplazar los componentes averiados oincorrectos.
� Aceptar la configuración real (descarga).
Causa El sistema de medición de recorrido y la válvula se han cambiado y ya nocoinciden con lo especificado en la configuración nominal, o los números deserie han cambiado.
Medida � Comprobar la configuración del eje. Comprobar si se han intercambiado 2ramales de eje por error.
02 Válvula desconocidaUnknown valve
F2 N
Causa La válvula conectada no es compatible.
Medida � Cambiar la válvula o� actualizar el firmware.
03 Cilindro desconocidoUnknown cylinder
F2 N
Causa El cilindro conectado o la conexión de sensores no son compatibles.
Medida � Cambiar el cilindro o la conexión de sensores.� Actualizar el firmware.
04 Sistema de medición de recorrido desconocido o conexión desensor desconocidaUnknown displacement encoder or unknown sensor interface
F2 N
Causa El sistema de medición del recorrido conectado o la conexión de sensores no soncompatibles.
Medida � Cambiar el sistema de medición de recorrido o la conexión de sensores.� Actualizar el firmware.
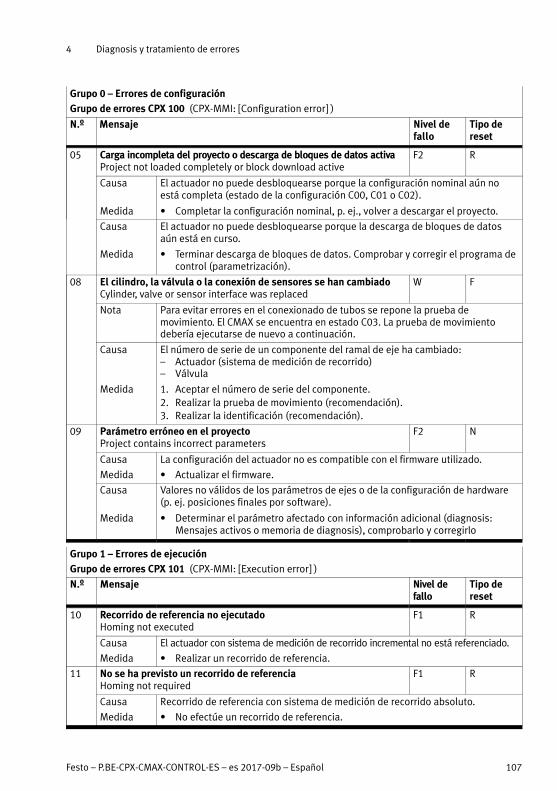
4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 107
Grupo 0 – Errores de configuraciónGrupo de errores CPX 100 (CPX-MMI: [Configuration error] )
N.º Tipo dereset
Nivel defallo
Mensaje
05 Carga incompleta del proyecto o descarga de bloques de datos activaProject not loaded completely or block download active
F2 R
Causa El actuador no puede desbloquearse porque la configuración nominal aún noestá completa (estado de la configuración C00, C01 o C02).
Medida � Completar la configuración nominal, p. ej., volver a descargar el proyecto.
Causa El actuador no puede desbloquearse porque la descarga de bloques de datosaún está en curso.
Medida � Terminar descarga de bloques de datos. Comprobar y corregir el programa decontrol (parametrización).
08 El cilindro, la válvula o la conexión de sensores se han cambiadoCylinder, valve or sensor interface was replaced
W F
Nota Para evitar errores en el conexionado de tubos se repone la prueba demovimiento. El CMAX se encuentra en estado C03. La prueba de movimientodebería ejecutarse de nuevo a continuación.
Causa El número de serie de un componente del ramal de eje ha cambiado:– Actuador (sistema de medición de recorrido)– Válvula
Medida 1. Aceptar el número de serie del componente.2. Realizar la prueba de movimiento (recomendación).3. Realizar la identificación (recomendación).
09 Parámetro erróneo en el proyectoProject contains incorrect parameters
F2 N
Causa La configuración del actuador no es compatible con el firmware utilizado.
Medida � Actualizar el firmware.
Causa Valores no válidos de los parámetros de ejes o de la configuración de hardware(p. ej. posiciones finales por software).
Medida � Determinar el parámetro afectado con información adicional (diagnosis:Mensajes activos o memoria de diagnosis), comprobarlo y corregirlo
Grupo 1 – Errores de ejecuciónGrupo de errores CPX 101 (CPX-MMI: [Execution error] )
N.º Mensaje Nivel defallo
Tipo dereset
10 Recorrido de referencia no ejecutadoHoming not executed
F1 R
Causa El actuador con sistema de medición de recorrido incremental no está referenciado.
Medida � Realizar un recorrido de referencia.
11 No se ha previsto un recorrido de referenciaHoming not required
F1 R
Causa Recorrido de referencia con sistema de medición de recorrido absoluto.
Medida � No efectúe un recorrido de referencia.
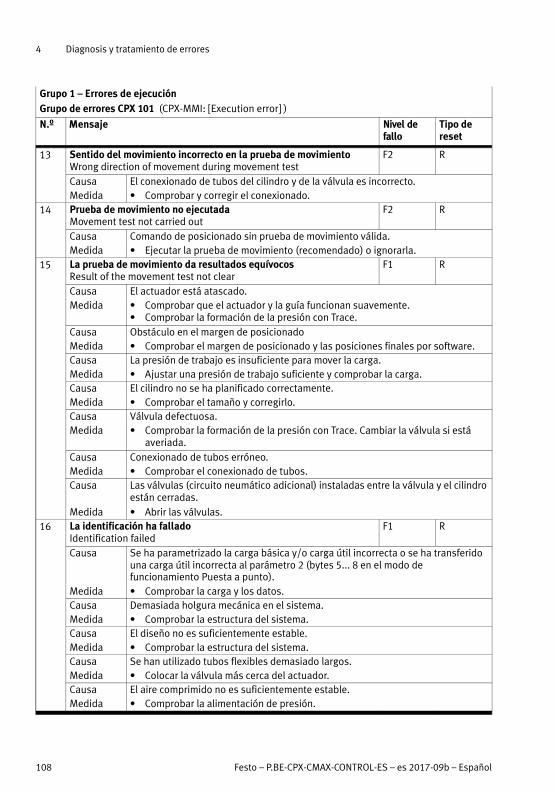
4 Diagnosis y tratamiento de errores
108 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Grupo 1 – Errores de ejecuciónGrupo de errores CPX 101 (CPX-MMI: [Execution error] )
N.º Tipo dereset
Nivel defallo
Mensaje
13 Sentido del movimiento incorrecto en la prueba de movimientoWrong direction of movement during movement test
F2 R
Causa El conexionado de tubos del cilindro y de la válvula es incorrecto.Medida � Comprobar y corregir el conexionado.
14 Prueba de movimiento no ejecutadaMovement test not carried out
F2 R
Causa Comando de posicionado sin prueba de movimiento válida.Medida � Ejecutar la prueba de movimiento (recomendado) o ignorarla.
15 La prueba de movimiento da resultados equívocosResult of the movement test not clear
F1 R
Causa El actuador está atascado.Medida � Comprobar que el actuador y la guía funcionan suavemente.
� Comprobar la formación de la presión con Trace.Causa Obstáculo en el margen de posicionadoMedida � Comprobar el margen de posicionado y las posiciones finales por software.Causa La presión de trabajo es insuficiente para mover la carga.Medida � Ajustar una presión de trabajo suficiente y comprobar la carga.Causa El cilindro no se ha planificado correctamente.Medida � Comprobar el tamaño y corregirlo.Causa Válvula defectuosa.Medida � Comprobar la formación de la presión con Trace. Cambiar la válvula si está
averiada.Causa Conexionado de tubos erróneo.Medida � Comprobar el conexionado de tubos.Causa Las válvulas (circuito neumático adicional) instaladas entre la válvula y el cilindro
están cerradas.Medida � Abrir las válvulas.
16 La identificación ha falladoIdentification failed
F1 R
Causa Se ha parametrizado la carga básica y/o carga útil incorrecta o se ha transferidouna carga útil incorrecta al parámetro 2 (bytes 5... 8 en el modo defuncionamiento Puesta a punto).
Medida � Comprobar la carga y los datos.Causa Demasiada holgura mecánica en el sistema.Medida � Comprobar la estructura del sistema.Causa El diseño no es suficientemente estable.Medida � Comprobar la estructura del sistema.Causa Se han utilizado tubos flexibles demasiado largos.Medida � Colocar la válvula más cerca del actuador.Causa El aire comprimido no es suficientemente estable.Medida � Comprobar la alimentación de presión.

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 109
Grupo 1 – Errores de ejecuciónGrupo de errores CPX 101 (CPX-MMI: [Execution error] )
N.º Tipo dereset
Nivel defallo
Mensaje
17 No se ha efectuado todavía la identificaciónIdentification not yet executed
W F
Causa La identificación no se ha realizado antes del inicio del registro y del modo directo.
Medida � Ejecutar la identificación.
18 Unidad de bloqueo activada en caso de habilitación de funcionamientoClamping unit was activated with operation enable
W F
Causa Se ha concedido la habilitación de funcionamiento (CCON.STOP = 1) a pesar deque la unidad de bloqueo todavía no se ha desbloqueado; o bien la unidad debloqueo se ha cerrado sin bloquear antes la habilitación de funcionamiento(CCON.STOP=0).
Medida � Retirar el desbloqueo del funcionamiento.� Desbloquear la unidad de bloqueo.� Corregir el orden al modificar la habilitación de funcionamiento y la unidad de
bloqueo.
19 Cambio del tipo de funcionamiento no permitidoImpermissible change of operation mode
F1 R
Causa Cambio entre el modo de registro y el modo directo con la orden de posicionadoactiva (SPOS.MC=0).
Medida � Ejecutar la conmutación solo después de finalizar una orden de posicionado(SPOS.MC = 1).
Causa Cambio entre modo de registro o modo directo y puesta a punto o parametrizacióncuando está activada la habilitación de funcionamiento (CCON.STOP=1).
Medida � Ejecutar la conmutación solo sin habilitación de funcionamiento.Activar CCON.STOP = 0 y esperar a SCON.READY = 0 y SPOS.MC = 1.
Grupo 2 – Errores de registro de posicionadoGrupo de errores CPX 102 (CPX-MMI: [Record error] )
N.º Mensaje Nivel defallo
Tipo dereset
21 Número de registro no permitidoInvalid record number
F1 R
Causa Al inicio había un número de registro no válido (0 o > número de frase máximoadmisible).
Medida � Comprobar el número de registro y corregirlo (transmitir primero el númerode registro y después el flanco de inicio).
22 El registro no está configuradoRecord is not configured
F1 R
Causa El registro llamado no está configurado y no contiene datos de posicionado válidos.
Medida � Comprobar y parametrizar el registro.
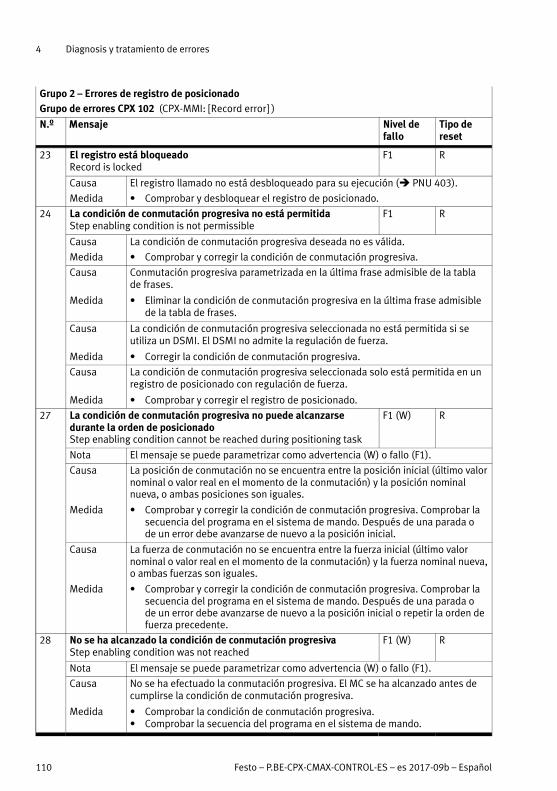
4 Diagnosis y tratamiento de errores
110 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Grupo 2 – Errores de registro de posicionadoGrupo de errores CPX 102 (CPX-MMI: [Record error] )
N.º Tipo dereset
Nivel defallo
Mensaje
23 El registro está bloqueadoRecord is locked
F1 R
Causa El registro llamado no está desbloqueado para su ejecución (� PNU 403).
Medida � Comprobar y desbloquear el registro de posicionado.
24 La condición de conmutación progresiva no está permitidaStep enabling condition is not permissible
F1 R
Causa La condición de conmutación progresiva deseada no es válida.
Medida � Comprobar y corregir la condición de conmutación progresiva.
Causa Conmutación progresiva parametrizada en la última frase admisible de la tablade frases.
Medida � Eliminar la condición de conmutación progresiva en la última frase admisiblede la tabla de frases.
Causa La condición de conmutación progresiva seleccionada no está permitida si seutiliza un DSMI. El DSMI no admite la regulación de fuerza.
Medida � Corregir la condición de conmutación progresiva.
Causa La condición de conmutación progresiva seleccionada solo está permitida en unregistro de posicionado con regulación de fuerza.
Medida � Comprobar y corregir el registro de posicionado.
27 La condición de conmutación progresiva no puede alcanzarsedurante la orden de posicionadoStep enabling condition cannot be reached during positioning task
F1 (W) R
Nota El mensaje se puede parametrizar como advertencia (W) o fallo (F1).
Causa La posición de conmutación no se encuentra entre la posición inicial (último valornominal o valor real en el momento de la conmutación) y la posición nominalnueva, o ambas posiciones son iguales.
Medida � Comprobar y corregir la condición de conmutación progresiva. Comprobar lasecuencia del programa en el sistema de mando. Después de una parada ode un error debe avanzarse de nuevo a la posición inicial.
Causa La fuerza de conmutación no se encuentra entre la fuerza inicial (último valornominal o valor real en el momento de la conmutación) y la fuerza nominal nueva,o ambas fuerzas son iguales.
Medida � Comprobar y corregir la condición de conmutación progresiva. Comprobar lasecuencia del programa en el sistema de mando. Después de una parada ode un error debe avanzarse de nuevo a la posición inicial o repetir la orden defuerza precedente.
28 No se ha alcanzado la condición de conmutación progresivaStep enabling condition was not reached
F1 (W) R
Nota El mensaje se puede parametrizar como advertencia (W) o fallo (F1).
Causa No se ha efectuado la conmutación progresiva. El MC se ha alcanzado antes decumplirse la condición de conmutación progresiva.
Medida � Comprobar la condición de conmutación progresiva.� Comprobar la secuencia del programa en el sistema de mando.

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 111
Grupo 3 – Errores de regulaciónGrupo de errores CPX 103 (CPX-MMI: [Control error] )
N.º Mensaje Nivel defallo
Tipo dereset
30 Timeout: Valor marcado como objetivo no alcanzadoTimeout: Target value not reached
F1 R
Nota El actuador no ha alcanzado a tiempo la tolerancia marcada como objetivo(monitorización de MC). Un encadenamiento de registros se interrumpe. Puedeocurrir, p. ej., al posicionar o al avanzar en operación por actuación secuencial(jog) a un tope dentro de la carrera útil.
Causa Obstáculo en el margen de posicionado (solo controlador de posición).
Medida � Retirar el obstáculo o corregir la posición de destino.
Causa El aire comprimido no es suficiente.
Medida � Comprobar la presión de alimentación y el conexionado de tubos, configurarel mensaje 50 como error, habilitar el actuador con la unidad de bloqueocerrada solo cuando haya suficiente presión de alimentación.
Causa Fricción muy alta o fricción irregular (solo controlador de posición).
Medida � Incrementar la amplificación del regulador.
Causa Holgura mecánica (solo el controlador de posición)
Medida � Comprobar la instalación: Comprobar la carga de masa, la estabilidad, lasguías y la holgura; repetir la identificación.
Causa El sistema no está configurado de manera óptima.
Medida � Comprobar la configuración (válvula, carga útil, posición de montaje, presiónde alimentación), incrementar el tiempo de timeout, aumentar la tolerancia.
Causa Comportamiento del sistema modificado (solo el controlador de posición).
Medida � Repetir la identificación.
31 No hay movimiento después de iniciarNo movement after start
F1 R
Nota Timeout: El actuador se ha movido menos de 11 mm dentro del tiempo de timeout.
Causa No se ha podido generar presión.
Medida � Comprobar la presión de alimentación.
Causa El actuador está atascado o marcha con dificultad.
Medida � Comprobar la guía y la estructura mecánica.
Causa La presión de trabajo es insuficiente para mover la carga total.
Medida � Ajustar una presión de trabajo suficiente y comprobar la configuración de lamasa.
Causa Válvula defectuosa.
Medida � Comprobar la formación de la presión con Trace; sustituir la válvula si estáaveriada.
Causa Conexionado de tubos erróneo.
Medida � Comprobar el conexionado de tubos.
Causa Las válvulas (circuito neumático adicional) instaladas entre la válvula y elcilindro están cerradas.
Medida � Abrir las válvulas.

4 Diagnosis y tratamiento de errores
112 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Grupo 3 – Errores de regulaciónGrupo de errores CPX 103 (CPX-MMI: [Control error] )
N.º Tipo dereset
Nivel defallo
Mensaje
32 La fuerza marcada como objetivo está fuera de los límitesTarget force outside the force limits
F1 (W) R
Nota El mensaje se puede parametrizar como advertencia (W) o fallo (F1).
Causa La fuerza marcada como objetivo está fuera de los límites ajustados.
Medida � Corregir la fuerza marcada como objetivo o el límite de fuerza.
Causa La fuerza marcada como objetivo es mayor que la fuerza máxima alcanzable (lafuerza máxima alcanzable marcada como objetivo puede divergir de la calculadateóricamente por el FCT).
Medida � Corregir la fuerza marcada como objetivo, incrementar la presión dealimentación, reducir la masa en movimiento en la construcción en vertical,utilizar un actuador más grande.
33 Posición de destino fuera de las posiciones finales por software opor hardwareTarget position outside the software or hardware end positions
F1 (W) R
Nota El mensaje se puede parametrizar como fallo (F1) o advertencia (W).
Causa La posición de destino queda fuera de las posiciones finales por software ajustadas.
Medida � Comprobar y corregir la posición de destino, las posiciones finales porsoftware y el punto cero del proyecto.
Causa La posición de destino queda fuera de las posiciones finales por hardwarealcanzables.
Medida � Comprobar y corregir la posición de destino y el punto cero del proyecto.
34 Valor nominal del funcionamiento de seguimiento fuera de losvalores límiteSetpoint value in tracking mode outside the limit values
W (F1) F (R)
Nota El mensaje se puede parametrizar como advertencia (W) o fallo (F1).
Causa La posición nominal queda fuera de las posiciones finales por software ajustadas.
Medida � Comprobar y corregir la posición nominal, las posiciones finales por softwarey el punto cero del proyecto.
Causa La posición nominal queda fuera de las posiciones finales por hardware alcanzables.
Medida � Comprobar y corregir la posición nominal y el punto cero del proyecto.
35 Posición final por software sobrepasadaSoftware end position passed
W (F1) F (R)
Nota La posición real ha sobrepasado una posición final por software con la regulación deposición activada, en este caso se tiene en cuenta una tolerancia de 2 mm.El mensaje se puede parametrizar como advertencia (W) o fallo (F1).
Causa Una fuerza externa ha sacado el actuador del margen válido.
Medida � Si es posible, impida la acción de fuerzas externas.
Causa Si el regulador no está ajustado de manera óptima se producen imprecisiones deposicionado claras.
Medida � Optimizar el regulador, comprobar la parametrización, realizar de nuevo laidentificación.

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 113
Grupo 3 – Errores de regulaciónGrupo de errores CPX 103 (CPX-MMI: [Control error] )
N.º Tipo dereset
Nivel defallo
Mensaje
36 Se ha alcanzado la posición final por software con la regulación defuerzaSoftware end position reached during force control
F1 R
Nota La posición real ha sobrepasado una posición final por software con laregulación de posición activada. Se tiene en cuenta una tolerancia de 2 mm.
Causa No hay pieza a manipular.
Medida � Comprobar la pieza a manipular y su posición.� Utilizar la conmutación progresiva de registros para retroceder o detener el
movimiento.
Causa Las posiciones finales por software pueden alcanzarse en el ciclo deseado.
Medida � Corregir las posiciones finales por software.
37 Conmutación a Perfil libreSwitch to Free Profile
W R
Causa Se ha intentado conmutar desde una orden de posicionado activa a una orden deposicionado con perfil automático.En modo de registro: Conmutación progresiva de registros con condición deconmutación distinta de “tras MC” (12) o inicio de un nuevo registro antes deCPOS.MC=1En modo directo: Inicio de una nueva orden de posicionado antes de CPOS.MC=1La orden de posicionado no se ejecuta como se ha configurado en el perfilautomático, sino en el perfil libre. Para la velocidad, aceleración y deceleraciónse utilizan los valores predeterminados (PNU 600, 602, 603).
Medida � Conmutar la orden siguiente a perfil libre, parametrizar las aceleraciones y lavelocidad.
Causa Se inicia una orden de posicionado con perfil automático aunque no se harealizado todavía ninguna identificación dinámica.La orden de posicionado no se ejecuta como se ha configurado en el perfilautomático, sino en el perfil libre. Para la velocidad, aceleración y deceleraciónse utilizan los valores predeterminados (PNU 600, 602, 603).
Medida � Realizar la identificación dinámica o utilizar el perfil libre.
38 Carrera crítica XLIM alcanzada con la regulación de fuerzaCritical stroke XLIM reached with force control
F1 R
Causa El límite de carrera parametrizado se sobrepasa con la regulación de fuerza.
Medida � Comprobar la pieza a manipular, comprobar el parámetro Carrera crítica odesactivar la monitorización de carrera.

4 Diagnosis y tratamiento de errores
114 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Grupo 3 – Errores de regulaciónGrupo de errores CPX 103 (CPX-MMI: [Control error] )
N.º Tipo dereset
Nivel defallo
Mensaje
39 Velocidad crítica VLIM alcanzada con regulación de fuerzaCritical velocity VLIM reached with force control
F1 R
Causa La velocidad crítica se ha alcanzado con regulación de fuerza.
Medida � Comprobar la pieza a manipular, comprobar el parámetro Carrera crítica odesactivar la monitorización de velocidad.
Causa El parámetro Velocidad reducida del registro de fuerza se ha ajustado con unavalor demasiado alto en comparación con el parámetro Velocidad crítica.
Medida � Sincronizar los parámetros Velocidad reducida y Velocidad crítica.
Causa La velocidad real del actuador en el momento de la conmutación progresiva deregistros a regulación de fuerza es demasiado elevada.
Medida � Reducir la velocidad del registro precedente, corregir la velocidad crítica,desactivar la monitorización de velocidad.
Grupo 4 – Errores del sistema AGrupo de errores CPX 104 (CPX-MMI: [System error A] )
N.º Mensaje Nivel defallo
Tipo dereset
40 Modo del regulador inadmisible en la regulación de fuerzaImpermissible control mode with force control
F1 R
Causa La regulación de fuerza está ajustada para DSMI.
Medida � El DSMI no puede ejecutar órdenes de regulación de la fuerza.
Causa Se ha ajustado un modo de control inadmisible en RCB1 o CDIR
Medida � Corregir RCB1 o CDIR.
Causa El seguimiento continuo del valor nominal no es posible con regulación de fuerza.
Medida � CDIR.CONT debe estar activado en 0.
41 El modo de posicionado Relativo no es admisible enfuncionamiento de seguimientoPositioning mode Relative not permissible in tracking mode
F1 R
Causa Bit relativo (CDIR.REL=1) ajustado en funcionamiento de seguimiento.
Medida � El valor de referencia continuo solo debe efectuarse de modo absoluto.
42 Bits de control reservados activadosReserved control bits set
W F
Causa Bit reservado activado en CCON, CPOS o CDIR.
Medida � Comprobar y corregir CCON, CPOS y CDIR.

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 115
Grupo 4 – Errores del sistema AGrupo de errores CPX 104 (CPX-MMI: [System error A] )
N.º Tipo dereset
Nivel defallo
Mensaje
43 La válvula y el sistema de medición de recorrido no estánconectados o hay un fallo en la comunicaciónValve and displacement encoder not connected or communicationfaulty
F2 N
Causa Al iniciar el ramal no se encontraron ni una válvula ni un sistema de medición derecorrido.
Medida � Comprobar la instalación.
Causa Hay un fallo en la comunicación con la válvula y el sistema de medición de recorrido.
Medida � Comprobar los cables y los componentes.
Causa Fallo de comunicación, p. ej., debido a componentes no admisibles o dañados enel ramal.
Medida � Comprobar la instalación, cambiar los componentes.

4 Diagnosis y tratamiento de errores
116 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Grupo 4 – Errores del sistema AGrupo de errores CPX 104 (CPX-MMI: [System error A] )
N.º Tipo dereset
Nivel defallo
Mensaje
44 No es posible programar por teach-inTeaching not possible
F1 R
Nota Causa exacta � Memoria de diagnosis o información adicional en PNU 203.
Causa La programación tipo teach-in (flanco descendente en CPOS.TEACH) se activa demanera accidental estableciendo la conexión o desconectado el control.
Medida � Activar CPOS.TEACH = 1 (preparación de la programación tipo teach-in) justoantes de realizar el procedimiento de programación. Cerrar la programaciónteach-in siempre inmediatamente.
Causa No es posible programar por teach-in en el modo directo.
Medida � Cambiar el modo de funcionamiento.
Causa No es posible programar por teach-in cuando la función de la puesta a punto estáactivada.
Medida � Terminar primero la función de la puesta a punto.
Causa En el modo Puesta a punto, el destino programado por teach-in en el parámetro 1no es válido.
Medida � Corregir el parámetro 1.
Causa No es posible programar por teach-in sin referencia.
Medida � Ejecutar el recorrido de referencia antes de programar por teach-in.
Causa La posición final por software (SWEL) inferior es mayor o igual a la SWEL superioral programarla por teach-in en el modo Puesta a punto. No se acepta la SWEL.
Medida � Programar primero por teach-in la SWEL superior.� Corregir la posición programada por teach-in.
Causa La posición final por software (SWEL) superior es menor o igual a la SWEL inferioral programarla por teach-in en el modo Puesta a punto. No se acepta la SWEL.
Medida � Programar primero por teach-in la SWEL inferior.� Corregir la posición programada por teach-in.
Causa El número de registro predeterminado programado por teach-in en el modo defuncionamiento de registro no es admisible.
Medida � Corregir el número de registro.
Causa El modo de control parametrizado del registro seleccionado programado porteach-in en el modo de funcionamiento de registro no es admisible.
Medida � Corregir el modo de control y el número de registro.
Causa Cambio del modo de funcionamiento mientras la programación teach-in estáactiva (CPOS.TEACH=1).
Medida � No ejecutar cambio de modo de funcionamiento durante CPOS.TEACH=1.

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 117
Grupo 4 – Errores del sistema AGrupo de errores CPX 104 (CPX-MMI: [System error A] )
N.º Tipo dereset
Nivel defallo
Mensaje
45 La función o los parámetros de la puesta a punto son erróneosFaulty commissioning function or parameter
F1 R
Causa Número de función no válido al iniciar una función de la puesta a punto en el modoPuesta a punto (� Datos I/O, modo de funcionamiento Puesta a punto - byte 3).
Medida � Corregir el número de función.
Causa Por lo menos un parámetro de la función de la puesta a punto iniciada tenía un valorinadmisible (� Datos I/O, modo de funcionamiento Puesta a punto - bytes 4 ... 8).
Medida � Comprobar y corregir los parámetros 1 y 2.
Causa Prueba de movimiento iniciada con una prueba de movimiento ya realizadacorrectamente.
Medida � Reponga primero la prueba de movimiento.
46 No está permitido iniciar con una orden de teach-in activaStart during active teach command not permitted
F1 R
Causa Modo de funcionamiento Puesta a punto: No está permitido iniciar una funciónde puesta a punto mientras la programación teach-in está activa(SPOS.TEACH=1)
Medida � No ejecutar ningún inicio durante la programación tipo teach-in, terminarantes la programación.
47 Inicio no permitido con orden de posicionado activaStart during active positioning command not permitted
F1 R
Causa No está permitido iniciar el funcionamiento de seguimiento mientras haya unaorden de posicionado activa.
Medida � Terminar la tarea de posicionado activa y esperar a Motion Complete(SPOS.MC=1).
Causa Flanco ascendente en CPOS.START no permitido durante:– Recorrido de referencia
– Actuación secuencial
– Función de puesta a punto
Medida � La orden de posicionado activa debe estar finalizada o detenida(SPOS.MC=1).
Causa Flanco ascendente en CPOS.HOME no permitido durante:– Recorrido de referencia
– Actuación secuencial
– Función de puesta a punto
– Orden de posicionado
Medida � La orden de posicionado activa debe estar finalizada o detenida(SPOS.MC=1).
Causa Flanco ascendente en CPOS.JOGN o CPOS.JOGP durante orden de posicionadoactiva.
Medida � La orden de posicionado activa debe estar finalizada o detenida(SPOS.MC=1).

4 Diagnosis y tratamiento de errores
118 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Grupo 5 – Errores del sistema BGrupo de errores CPX 105 (CPX-MMI: [System error B] )
N.º Mensaje Nivel defallo
Tipo dereset
50 Presión de funcionamiento demasiado bajaSupply pressure is too low
W (F2) F
Nota El mensaje se puede parametrizar como advertencia (W) o fallo (F2).
Causa La presión en las dos cámaras del cilindro es demasiado baja o aumenta muy
lentamente. Con FCT o PNU 1144 se puede optimizar el retardo de respuesta de
la monitorización de presión.
Medida � Comprobar la alimentación de presión.
� Adaptar el parámetro Retardo de respuesta (� FCT o PNU 1144).
51 Tensión de carga del controlador fuera del margen de toleranciaController load voltage outside tolerance range
F2 F
Causa Tensión de carga < 20 V con el regulador habilitado o sobrecarga en el ramal.
Medida � Comprobar la alimentación de carga de válvulas (UVAL).
52 Tensión de carga del controlador fuera del margen de toleranciaController operating voltage outside tolerance range
F2 F
Causa Tensión de funcionamiento < 18 V o sobrecarga en el ramal.
Medida � Comprobar la alimentación de la tensión de funcionamiento de
electrónica/sensores (UEL/SEN).
53 Sobrecarga de la tensión de la carga en el controladorLoad voltage overload on the controlle
F2 F
Causa Cortocircuito en los cables del ramal (entre el controlador y la válvula o la válvula
y la conexión de sensores).
Medida � Comprobar los cables y módulos del ramal (p. ej., rotura de cable); cambiar
los cables deteriorados.
Causa Sobrecarga en las salidas de la válvula.
Medida � Comprobar y corregir la conexión de circuitos de las salidas.
Causa Avería en la válvula.
Medida � Comprobar los cables y la válvula sistemáticamente, sustituir los
componentes averiados.
Causa Avería en el CMAX.
Medida � Comprobar el CMAX y cambiarlo si está averiado.

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 119
Grupo 5 – Errores del sistema BGrupo de errores CPX 105 (CPX-MMI: [System error B] )
N.º Tipo dereset
Nivel defallo
Mensaje
54 Sobrecarga de la tensión de funcionamiento en el controladorOperating voltage overload on the controller
F2 F
Causa Cortocircuito en los cables del ramal (entre el controlador y la válvula o la válvula
y la conexión de sensores).
Medida � Comprobar los cables y módulos del ramal (p. ej., rotura de cable); cambiar
los cables deteriorados.
Causa Avería en el controlador CMAX
Medida � Comprobar el CMAX y cambiarlo si está averiado.
Causa Avería en la válvula
Medida � Comprobar los cables y la válvula sistemáticamente, sustituir los
componentes averiados.
Causa Defecto en el sistema de medición de recorrido o en la conexión de sensores
Medida � Comprobar sistemáticamente los cables y el sistema de medición de
recorrido o la conexión de sensores. Reemplazar los componentes averiados.
56 Presión de funcionamiento demasiado baja para el recorrido dereferencia
Supply pressure too low for homing
F1 R
Causa En el recorrido de referencia se ha detectado una presión de trabajo demasiado
baja.
Medida � Comprobar y corregir la presión de funcionamiento.
� Comprobar la parametrización de la presión de funcionamiento.
57 Timeout interfaz de diagnosis: Se ha desactivado el mando delequipo FCT
Timeout diagnostic interface: FCT device control was deactivated
W R
Causa Conexión entre el PC y el nodo CPX interrumpida.
Medida � Comprobar los cables.
Causa Interrupción de la comunicación inducida por el FCT
Medida � Vuelva a establecer la conexión.

4 Diagnosis y tratamiento de errores
120 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Grupo 5 – Errores del sistema BGrupo de errores CPX 105 (CPX-MMI: [System error B] )
N.º Tipo dereset
Nivel defallo
Mensaje
58 Error de handshakeHandshake error
F1 (W) R
Nota El mensaje se puede parametrizar como advertencia (W) o fallo (F1).
Causa CPOS.START activado durante la habilitación de funcionamiento.
Observación: Si E58 está configurado como advertencia W58, en la habilitación
de funcionamiento se activa SPOS.ACK = 1.
Medida � Reponer CPOS.START antes de la habilitación de funcionamiento
(CPOS.START = 0).
Causa CPOS.HOME activado durante la habilitación de funcionamiento.
Observación: Si E58 está configurado como advertencia W58, en la habilitación
de funcionamiento se activa SPOS.ACK = 1.
Medida � Reponer CPOS.HOME antes de la habilitación de funcionamiento
(CPOS.HOME = 0).
Causa Flanco ascendente en CPOS.START o CPOS.HOME o CPOS.JOGP o CPOS.JOGN
aunque SPOS.ACK = 1 (se ignora la orden de posicionado).
Medida � Nueva orden de posicionado solo cuando SPOS.ACK = 0
Causa CPOS.JOGP activado durante la habilitación de funcionamiento.
Medida � Reponer CPOS.JOGP antes de la habilitación de funcionamiento (CPOS.JOGP
= 0).
Causa CPOS.JOGN activado durante la habilitación de funcionamiento.
Medida � Reponer CPOS.JOGN antes de la habilitación de funcionamiento (CPOS.JOGN
= 0).
Causa Inicio simultáneo de varias órdenes de posicionado.
Medida � Iniciar solo una orden de posicionado.
Grupo 6 – Errores de válvulaGrupo de errores CPX 106 (CPX-MMI: [Error in valve] )
N.º Mensaje Nivel defallo
Tipo dereset
60 La válvula no está conectada o hay un fallo en la comunicaciónValve not connected or communication faulty
F2 N
Causa Al conectar se ha detectado solamente el sistema de medición de recorrido/ la
conexión de sensores. No se ha detectado la válvula.
Medida � Comprobar los cables que van a la válvula.
� Cambiar la válvula.
Causa Se ha interrumpido la comunicación entre el CMAX y la válvula.
Medida � Comprobar sistemáticamente los cables del ramal, la válvula y el sistema de
medición de recorrido, sustituir los componentes averiados.
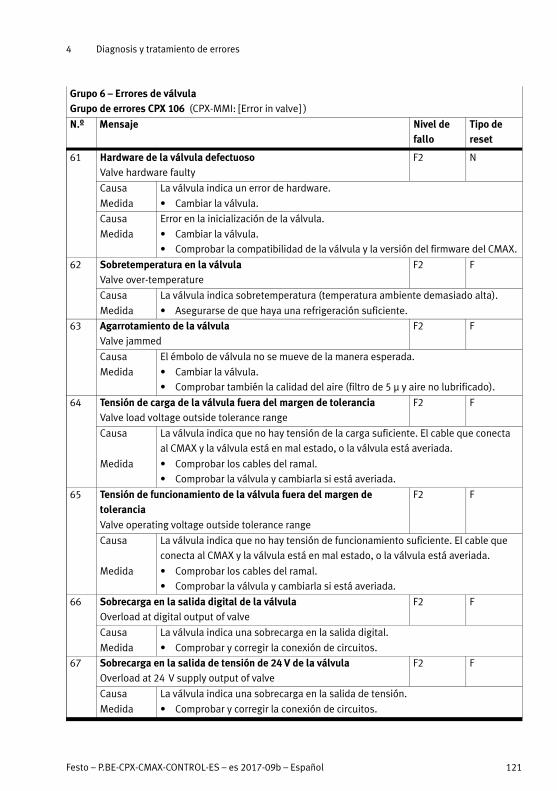
4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 121
Grupo 6 – Errores de válvulaGrupo de errores CPX 106 (CPX-MMI: [Error in valve] )
N.º Tipo dereset
Nivel defallo
Mensaje
61 Hardware de la válvula defectuosoValve hardware faulty
F2 N
Causa La válvula indica un error de hardware.
Medida � Cambiar la válvula.
Causa Error en la inicialización de la válvula.
Medida � Cambiar la válvula.
� Comprobar la compatibilidad de la válvula y la versión del firmware del CMAX.
62 Sobretemperatura en la válvulaValve over-temperature
F2 F
Causa La válvula indica sobretemperatura (temperatura ambiente demasiado alta).
Medida � Asegurarse de que haya una refrigeración suficiente.
63 Agarrotamiento de la válvulaValve jammed
F2 F
Causa El émbolo de válvula no se mueve de la manera esperada.
Medida � Cambiar la válvula.
� Comprobar también la calidad del aire (filtro de 5 μ y aire no lubrificado).
64 Tensión de carga de la válvula fuera del margen de toleranciaValve load voltage outside tolerance range
F2 F
Causa La válvula indica que no hay tensión de la carga suficiente. El cable que conecta
al CMAX y la válvula está en mal estado, o la válvula está averiada.
Medida � Comprobar los cables del ramal.
� Comprobar la válvula y cambiarla si está averiada.
65 Tensión de funcionamiento de la válvula fuera del margen detolerancia
Valve operating voltage outside tolerance range
F2 F
Causa La válvula indica que no hay tensión de funcionamiento suficiente. El cable que
conecta al CMAX y la válvula está en mal estado, o la válvula está averiada.
Medida � Comprobar los cables del ramal.
� Comprobar la válvula y cambiarla si está averiada.
66 Sobrecarga en la salida digital de la válvulaOverload at digital output of valve
F2 F
Causa La válvula indica una sobrecarga en la salida digital.
Medida � Comprobar y corregir la conexión de circuitos.
67 Sobrecarga en la salida de tensión de 24 V de la válvulaOverload at 24 V supply output of valve
F2 F
Causa La válvula indica una sobrecarga en la salida de tensión.
Medida � Comprobar y corregir la conexión de circuitos.

4 Diagnosis y tratamiento de errores
122 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Grupo 6 – Errores de válvulaGrupo de errores CPX 106 (CPX-MMI: [Error in valve] )
N.º Tipo dereset
Nivel defallo
Mensaje
68 Preaviso de sobretemperatura en la válvulaPreliminary warning valve over-temperature
W F
Causa La válvula indica una temperatura de funcionamiento elevada. (Temperatura
ambiente demasiado alta).
Medida � Asegurarse de que haya una refrigeración suficiente.
Grupo 7 – Errores del controladorGrupo de errores CPX 107 (CPX-MMI: [Controller error] )
N.º Mensaje Nivel defallo
Tipo dereset
72 Error del software del sistemaSystem software error
FS Poff
Causa Error interno de software (firmware).
Medida � Si es posible, consulte la memoria de diagnosis y guarde y archive el proyecto.
� Desconecte y conecte el controlador. Observe si el error vuelve a aparecer.
� Póngase en contacto con el servicio de asistencia técnica.
73 Hardware del controlador averiadoController hardware faulty
FS Poff
Causa No hay comunicación con el CMAX. El error se visualiza ahora en el display.
Medida � Desconecte y conecte el controlador. Observe si el error vuelve a aparecer.
� Cambiar el CMAX.
74 No hay firmwareNo firmware
FS Poff
Causa No hay firmware. No es posible establecer la comunicación a través del bus de
campo.
Medida � Descarga de firmware con FCT.
75 Datos de usuario dañadosUser data damaged
F2 N
Causa Datos de usuarios no consistentes.
Medida � Restablezca los datos y vuelva a poner el eje en funcionamiento.
76 Reinicio inesperado: es posible que se pierdan datosUnexpected restart: Possible data loss
F2 F
Causa El CMAX se ha reiniciado de forma inesperada, no se han podido guardar los
datos de usuario.
Medida � Comprobar si los datos de usuario están completos y son correctos.
� Comprobar si el CMAX está expuesto a interferencias electromagnéticas
demasiado intensas y eliminarlas.
� Póngase en contacto con el servicio de asistencia técnica.

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 123
Grupo 7 – Errores del controladorGrupo de errores CPX 107 (CPX-MMI: [Controller error] )
N.º Tipo dereset
Nivel defallo
Mensaje
77 Firmware dañadoFirmware damaged
FS Poff
Causa Fallo en la suma de comprobación del firmware
Medida � Realizar descarga del firmware.
� Póngase en contacto con el servicio de asistencia técnica.
Grupo 8 – Errores del sistema de medición de recorridoGrupo de errores CPX 108 (CPX-MMI: [Encoder error] )
N.º Mensaje Nivel defallo
Tipo dereset
80 El sistema de medición de recorrido no están conectado o hay unfallo en la comunicaciónDisplacement encoder not connected or communication faulty
F2 N
Causa Al conectar no se ha detectado el sistema de medición de recorrido/conexión desensores.
Medida � Cambiar el sistema de medición de recorrido/interface de sensor, comprobarlos cables.
Causa Fallo en la comunicación entre el CMAX y el sistema de medición de recorrido/conexión de sensores.
Medida � Comprobar los cables del ramal, la válvula y el sistema de medición de recorrido/conexión de sensores sistemáticamente, sustituir los componentes averiados.
81 Hardware del sistema de medición del recorrido o de la conexión desensores averiadoHardware of the displacement encoder or sensor interface faulty
F2 N
Causa Hardware del sistema de medición del recorrido o de la conexión de sensoresaveriado.
Medida � Cambiar el sistema de medición de recorrido/conexión de sensores.
Causa Error en la inicialización del sistema de medición del recorrido/la conexión desensores.
Medida � Cambiar el sistema de medición de recorrido/conexión de sensores.� Comprobar la compatibilidad del sistema de medición de recorrido/conexión
de sensores con la versión de firmware del CMAX.

4 Diagnosis y tratamiento de errores
124 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Grupo 8 – Errores del sistema de medición de recorridoGrupo de errores CPX 108 (CPX-MMI: [Encoder error] )
N.º Tipo dereset
Nivel defallo
Mensaje
82 Valores medidos no válidos o error del sistema de medición derecorridoInvalid measured values or displacement encoder faulty
F2 F
Causa DGCI/DDLI: No hay ningún imán.
Medida � Comprobar el imán del sistema de medición, cambiar el soporte del imán si esnecesario.
Causa DGCI/DDLI: Hay varios imanes.
Medida � Asegurarse de que no haya imanes de otro tipo en las inmediaciones del sistema de medición de recorrido.
Causa DGCI/DDLI: Impulsos múltiples (p. ej., causa de vibraciones).
Medida � Comprobar la estructura.� Evitar que se produzcan vibraciones.
Causa DNCI: Error del sensor.
Medida � Cambiar el cabezal del sensor del DNCI.
Causa Potenciómetro: Bajón de la tensión de funcionamiento por debajo de 12 V.
Medida � Comprobar la tensión de funcionamiento y que los cables no esténcortocircuitados ni presenten corrosión.
84 Se ha perdido la posición de referencia del sistema de medición derecorridoReference position of the displacement encoder lost
F2 N
Causa Aunque el actuador ha activado el estado “Referenciado”, el sistema demedición del recorrido/la conexión de sensores indica “No referenciado”.
Medida � Referencie de nuevo.
85 Tensión de funcionamiento del sistema de medición de recorrido/conexión de sensores fuera de la toleranciaOperating voltage of displacement encoder/sensor interface outsidetolerance
F2 F
Causa La tensión de funcionamiento del sistema de medición de recorrido esdemasiado baja.
Medida � Comprobar la fuente de alimentación.� Comprobar los cables del ramal.

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 125
Grupo 8 – Errores del sistema de medición de recorridoGrupo de errores CPX 108 (CPX-MMI: [Encoder error] )
N.º Tipo dereset
Nivel defallo
Mensaje
87 Cable del sistema de medición de recorrido averiado o potenciómetro en posición final eléctricaDefective displacement encoder cable or potentiometer in electricalend position
F2 N
Causa Cable del sistema de medición de recorrido averiado.
Medida � Comprobar la fuente de alimentación.� Comprobar los cables del ramal.� Puede ser necesario desconectar/conectar.� Si el fallo persiste cambiar el sistema de medición de recorrido o la conexión
de sensores.
Causa Sistema de medición de recorrido en la posición final eléctrica (solo potenciómetro).
Medida � Desplazar el sistema de medición de recorrido (potenciómetro) de la posiciónfinal.
89 Datos erróneos en el sistema de medición de recorrido/conexión desensoresIncorrect data content in the displacement encoder/sensor interface
F2 N
Causa El sistema de medición de recorrido/conexión de sensores contiene datoserróneos o contradictorios.
Medida � Desconectar y volver a conectar la fuente de alimentación.Si el error vuelve a aparecer:� Cambiar el sistema de medición de recorrido/conexión de sensores.� Comprobar la compatibilidad del sistema de medición de recorrido/conexión
de sensores con la versión de firmware del CMAX.

4 Diagnosis y tratamiento de errores
126 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
4.3 Parámetros de diagnosis
4.3.1 Estado actual de diagnosis
El CMAX tiene diferentes parámetros para emitir mensajes de diagnosis actuales.
PNU Descripción resumida
220 Mensajes de error activos, codificación en bits
221 Mensajes de advertencia activos, codificación en bits
224 Mensaje actual visualizado “Exx” en el display
225 Nivel activo actualmente
226 Advertencia a visualizar actualmente en el FCT
227 Estado de error, codificación en bits para FCT
Tab. 4.6 Parámetros de diagnosis
Parámetros Descripción
Mensajes codificados
en bits
PNU 220
PNU 221
Cada parámetro es un campo de bits compuesto por tres valores uint32 y
contiene, por tanto, 3 x 32 bits = 96 bits de memoria. Cada bit de esta
matriz representa un número de error. Si está activado, el mensaje de error
correspondiente también lo está.
Ejemplo:
PNU 220:01 = 0x00000001 Bit 0 activado E01 activo
PNU 220:02 = 0x00000040 Bit 38 (32+ 6) activo E39 activo
PNU 220:03 = 0x00030000 Bit 80 (32 + 32 + 16) activo E81 activo
Bit 81 (32 + 32 + 17) activo E82 activo
Esta representación está optimizada para ser evaluada por una unidad de
control de nivel superior, ya que esta codificación de bits puede utilizarse
directamente para controlar un MMI.
PNU 220: Contiene errores actuales
PNU 221: Contiene advertencias actuales
Mensaje en el display
PNU 224
PNU 226
El PNU 224 contiene el número de error que se está visualizando en el
display. Éste permite comparar la indicación del FCT con la del CMAX. Se
visualiza siempre el primer mensaje producido.
El PNU 226 contiene el número de advertencia que debe visualizar el FCT.
La advertencia no se visualiza en el display del CMAX.
Nivel activo
PNU 225
Con él, el FCT puede mostrar el estado actual del CMAX conforme al nivel
del error o de la advertencia (� Sección 4.2.1). El nivel actual depende
siempre del error más grave indicado actualmente.
Estado de error
codificado en bits PNU
227
El estado de error codificado en bits permite al FCT visualizar exactamente
el estado de un mensaje de error activo. La codificación es idéntica a la de
la información adicional PNU 203. Descripción (� Sección 4.3.3).
Tab. 4.7 Parámetros de la memoria de diagnosis

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 127
4.3.2 Memoria de diagnosisLa memoria de diagnosis contiene los mensajes de diagnosis de los 100 últimos eventos producidos.
La memoria no se borra en caso de error de tensión. Si la memoria intermedia está llena, el elemento
más antiguo se sobrescribe. Al leer, se empieza por la entrada más reciente (principio LIFO).
Número (subíndice) Entrada de la memoria de diagnosis
1 Mensaje de diagnosis más reciente (último)
2 Penúltimo mensaje de diagnosis
... ...
100 Mensaje de diagnosis más antiguo
Tab. 4.8 Estructura de la memoria de diagnosis
Estructura de una entrada de la memoria de diagnosis
Registro de tiempo
Días enfuncionamiento
Milisegundosdel día
Evento Código dediagnosis
Informaciónadicional
Determina el significado
Determina el significado
PNU 222 PNU 202 PNU 200 PNU 201 PNU 203int32 int32 int32 int32 int32 (codificado
en bits)
Nº de días en
funcionamiento
Nº de milisegundos
del día
Evento de
diagnosis
Código de
diagnosis
Información
adicional para FCT
Tab. 4.9 Estructura de la entrada de la memoria de diagnosis
Con PNU 228 se puede configurar qué entradas deben registrarse en la memoria de
diagnosis � Sección 4.4.

4 Diagnosis y tratamiento de errores
128 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Parámetro Descripción
Registro de tiempo
PNU 202
PNU 222
Momento en que se produjo el evento de diagnosis desde el estado de
entrega, restablecimiento de los datos del equipo o de la descarga de
firmware en milisegundos.
– El PNU 222 contiene el número de días
– El PNU 202 contiene el número de milisegundos del día
El registro de tiempo no es una hora real: La hora se lee en los datos del
equipo (PNU 140) al generarse el mensaje. El CMAX cuenta la duración del
funcionamiento.
Al desconectar, la hora actual (� PNU 140) se guarda y vuelve a cargarse
al conectar.
Evento de diagnosis
PNU 200
Tipo de mensaje de diagnosis.
En la memoria de diagnosis no solo se registran errores y advertencias,
sino también procesos de conexión, resets o eventos de configuración.
La interpretación del código de diagnosis y de la información adicional
depende de los tipos de evento.
Código de diagnosis
PNU 201
El código de diagnosis contiene una indicación detallada acerca del evento
de diagnosis. En caso de errores y advertencias se trata del número exacto,
en eventos de configuración se trata de la función ejecutada, etc.
Información adicional
PNU 203
Información detallada acerca del evento de diagnosis. La evaluación es
compleja y, por ello, solo apropiada para un programa de control de forma
condicionada. Descripción � Sección 4.3.3.
Tab. 4.10 Parámetros de la memoria de diagnosis
Eventos de diagnosis
El evento de diagnosis determina el significado del código de diagnosis y de la información adicional.
Eventos de diagnosis (PNU 200)Valor 1) Ind. Descripción Código de diagnosis (PNU 201) Información adicional (PNU 203)
0 – Entrada vacía – –
1 E... Error Número de error � 4.2.4 Información adicional de error
3 R... Reset Número de reset � 4.3.4 Información adicional de reset
5 W... Advertencia Número de
advertencia � 4.2.4
Información adicional de
advertencia
7 P... Conexión Información de
conexión � 4.3.4
Información adicional acerca de
la conexión
8 C... Configuración Información de
configuración � 4.3.4
Información adicional de
configuración
1) Otros valores están reservados
Tab. 4.11 Valores de los eventos de diagnosis con asignación al código de diagnosis y a la información
adicional
El FCT puede registrar detalles acerca de la entrada correspondiente con ayuda de la información
adicional en función del evento.

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 129
Ejemplo de mensajes de diagnosis en el FCTRegistro de tiempo Evento N.° Descripción
2817d 17h 21.123s Reset R01 Reset ejecutado correctamente. Todos los mensajes se
han borrado. Ya no hay más errores.
2817d 16h 18.123s Error E50 Presión de funcionamiento demasiado baja ( < 1,5 bar )
Último comando: Ejecutar frase, número de frase 64
2817d 03h 18.123s Conexión P01 Datos del proyecto existentes y cargados (duración de la
inicialización: 1289 ms).
Número de conexiones desde la última entrada de diag
nosis: 219
117d 03h 18.123s Con
figuración
C05 Identificaciones estática y dinámica ejecutadas.
Duración: 178 s. Identificación ejecutada correctamente.
Tab. 4.12 Ejemplos de eventos de diagnosis
PNU 204: Administración de la memoria de diagnosis
Índice Descripción
1, 2 Reservado
3 – Escritura de 1: Se borra la memoria de diagnosis.
– Al leer se obtiene siempre el valor 0.
Normalmente no es necesario borrarla (memoria intermedia circular; cuando la memoria
está llena, la entrada más reciente sobrescribe la más antigua).
4 Número de entradas válidas. La escritura no está permitida.
5 Número de entradas sin leer.
Con cada entrada nueva en la memoria de diagnosis, el valor aumenta en 1.
Se puede poner en 0 en el PNU.
Tab. 4.13 Administración de la memoria de diagnosis
4.3.3 Estado de error e información adicional
Esta información adicional está pensada sobre todo para la diagnosis con el FCT. La información
adicional complementa el número de error con datos prácticos como, p. ej., el número de frase.
Además, en el caso de mensajes activos, informa de si es posible confirmar del error o de si la causa
todavía está activa. La codificación es igual para los parámetros:
– PNU 203: Información adicional en caso de mensajes en la memoria de diagnosis. Índices 1 ... 100
en función del número de entrada
– PNU 227: Codificación del estado actual de un mensaje. Índices 1 ... 89 en función del número de
error o de advertencia
Como puede haber varios errores o advertencias al mismo tiempo, la información del PNU 227 debe
estar disponible por separado para cada número. Por ello, en las consultas debe indicarse el número
como índice.

4 Diagnosis y tratamiento de errores
130 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Asignación de la información adicional para errores y advertencias
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Código interno de diagnosis A S Reset Nivel Info Detalles
Tab. 4.14 Información adicional
La codificación de los PNU 203 y 227 es igual, pero sólo contiene la información necesaria y disponible
para el parámetro correspondiente.
Margen Nombre Descripción
Bits 31...22
(PNU 203 / --)
Código interno
de diagnosis
Información interna de diagnosis (sólo para el personal de servicio).
Bit 21
(-- / PNU 227)
A Acción requerida= 0: Confirmar: La causa del mensaje no está activa en este
momento o no se está comprobando.
El mensaje puede confirmarse.
= 1: Subsanar: La causa del mensaje todavía está activa.
La causa debe eliminarse antes de poder confirmar el
mensaje.
Nota: En caso de errores con el tipo de reset Poff (bits 19 ... 16) es
siempre necesario desconectar/conectar independientemente del
estado del bit 21.
Bit 20
(-- / PNU 227)
S Estado del mensaje de error= 0: Actualmente el mensaje no está activo.
= 1: Mensaje activo
Bits 19...16
(PNU 203 /
PNU 227)
Tipo de reset
(� 4.2.2)
Describe lo que ocurre con una orden de reset.= 0: Ninguna reacción
= 1: R = Borrar mensajes de error
= 2: F = Borrar mensaje de error si la causa se eliminó
anteriormente
= 3: N = Volver a inicializar el eje
= 4: Poff = Desconectar el CMAX
Bits 15...12
(PNU 203 /
PNU 227)
Nivel
(� 4.2.1)
Describe la reacción ante el error o la advertencia= 0: Ninguna
= 1: Información (ignorar mensaje)
= 2: W = Advertencia
= 5: F1 = Error 1
= 6: F2 = Error 2
= 15: FS = Error del sistema
Bits 11...8
(PNU 203 / --)
Info Describe a qué se refieren los detalles(� Tab. 4.16)
Bits 7...0
(PNU 203 / --)
Detalles Detalles adicionales acerca de la causa del mensaje(� Tab. 4.16)
Tab. 4.15 Asignación de la información adicional para errores y advertencias

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 131
Información y detalles acerca de los mensajes (PNU 203)Información (bits 11 ... 8) Detalles (bits 7 ... 0)
Valor Descripción Valor Descripción
0 Ninguna información – –
1 Causa de la advertenciaW08 (el cilindro, laválvula o la conexión desensores se hancambiado)
1 Sin especificar
2 La válvula se ha cambiado
3 El cilindro se ha cambiado
4 El cilindro, el sistema de medición de recorrido o laconexión de sensores se han cambiado
2 Causa del error E09(parámetro incorrectoen el proyecto)
1 Sin especificar
2 Un parámetro necesario está sin configurar (presión dealimentación, carga básica, parámetro del controlador)
3 El tipo de sistema de medición del recorrido no secorresponde con el tipo de cilindro
4 La longitud del cilindro no se corresponde con el tipo decilindro
5 La longitud del sistema de medición del recorrido no secorresponde con el tipo de cilindro
6 La longitud del sistema de medición con este tipo decilindro debe ser igual a la longitud del cilindro
7 El offset del punto cero del eje no es admisible con estecilindro (debe ser 0)
8 El decalaje del punto cero del eje no es correctoMargen admisible:-longitud del cilindro = offset del punto cero delproyecto 0
9 El diámetro del cilindro no se corresponde con el tipo decilindro
10 El diámetro del vástago no se corresponde con el tipo decilindro
11 Se han configurado dos válvulas diferentes
12 La posición final inferior por software es menor que laposición final inferior por hardware
13 La posición final superior por software es mayor que laposición final superior por hardware
14 La posición final inferior por software es mayor o igualque la posición final superior por software

4 Diagnosis y tratamiento de errores
132 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Información y detalles acerca de los mensajes (PNU 203)
Información (bits 11 ... 8) Detalles (bits 7 ... 0)
Valor DescripciónValorDescripción
3 Causa del error E44 (noes posible programarpor teach-in)
1 Sin especificar
2 En el modo directo no puede realizarse la programacióntipo teach-in (no hay destino teach-in)
3 Recorrido de referencia no ejecutado
4 Puesta a punto: Se ha introducido un destino teach-indesconocido en el parámetro 1
5 Modo de frase: Número de frase inadmisible (0 o> número de frase máximo admisible)
6 Modo de frase: Modo de control inadmisible preajustadoen la frase seleccionada
7 Puesta a punto: Programación teach-in de la posiciónfinal inferior por software posición final superior porsoftware no admisible
8 Puesta a punto: Programación teach-in de la posiciónfinal superior por software posición final inferior porsoftware no admisible
9 Puesta a punto: No está permitido programar por teach-inmientras se ejecuta una función de la puesta a punto
10 Cambio del modo de funcionamiento mientras laprogramación teach-in está activa (CPOS.TEACH=1)
4 Número de frase nn En caso de un error general en el modo de frase seintroduce el número de la última frase iniciada. Margen de valores nn: De 0 a 255
5 Función de la puesta apunto
nn 1 = identificación2 = prueba de movimiento

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 133
Información y detalles acerca de los mensajes (PNU 203)
Información (bits 11 ... 8) Detalles (bits 7 ... 0)
Valor DescripciónValorDescripción
6 Función delaccionamiento en laque se produjo el error
1 Conexión2 Desbloquear accionamiento3 Bloquear accionamiento4 Habilitar funcionamiento5 Bloquear funcionamiento (parada)10 Inicio en modo directo11 Inicio orden de posicionamiento en modo directo12 Inicio orden de fuerza en modo directo13 Inicio orden de posicionamiento continua en modo directo14 Inicio orden de fuerza continua en modo directo20 Inicio recorrido de referencia21 Inicio recorrido de referencia, método 35 (posición real
actual)22 Inicio recorrido de referencia, método -17 (positivo
contra bloque)23 Inicio recorrido de referencia, método -18 (positivo
contra bloque)30 Operación por actuación secuencial en sentido negativo
(CPOS.JOGN)31 Operación por actuación secuencial en sentido positivo
(CPOS.JOGP)32 Programación tipo teach-in33 Programación teach-in de valor nominal en tabla de frases34 Programación teach-in de posición final inferior por software35 Programación teach-in de posición final superior por
software36 Programación teach-in del decalaje del punto cero del
proyecto7 Causa del error E58 1 Información detallada no disponibleCausa del error E58
(error de handshake) 2 2 CPOS.START activado durante la habilitación defuncionamiento
3 CPOS.HOME activado durante la habilitación defuncionamiento
4 Flanco ascendente en CPOS.START aunque SPOS.ACK=15 Flanco ascendente en CPOS.HOM aunque SPOS.ACK=16 Flanco ascendente en CPOS.JOGP aunque SPOS.ACK=17 Flanco ascendente en CPOS.JOGN aunque SPOS.ACK=18 CPOS.JOGP activado durante la habilitación de
funcionamiento9 CPOS.JOGN activado durante la habilitación de
funcionamiento10 Inicio simultáneo de varias órdenes de posicionamiento
Tab. 4.16 Información y detalles para errores

4 Diagnosis y tratamiento de errores
134 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
4.3.4 Código de diagnosis e información adicional en caso de reset, conexión y configuraciónEn la memoria de diagnosis se guardan otros eventos de diagnosis además de los errores y de las
advertencias.
Evento de diagnosis 3: ResetSe ha ejecutado un comando de reset con el FCT o con la unidad de control de nivel superior.
Código de diagnosis (PNU 201)N.° Descripción
1 Realizado con éxito: Todos los mensajes se han borrado
2 No realizado con éxito: No se han podido borrar todos los mensajes
3 Se ha ejecutado un reinicio del eje
Información adicional (PNU 203)Info Descripción
Byte 1 Número de resets realizados hasta ahora1)
Byte 2 Reservado
Bytes 3 y 4 Duración del reset en milisegundos al reiniciar el eje
1) Los resets ejecutados uno tras otro se resumen en una entrada
Evento de diagnosis 7: ConectarEl CMAX se ha conectado.
Código de diagnosis (PNU 201)N.° Descripción
1 Inicio normal: Datos del proyecto cargados por completo
2 Inicio en el modo de configuración C00: No hay ningún proyecto
3 Inicio en el modo de configuración C01: Proyecto incompleto
4 Inicio en el modo de configuración C02: Proyecto incompleto
5 Inicio en el modo de configuración C03: Debe realizarse una prueba de movimiento
Información adicional (PNU 203)Info Descripción
Byte 1 Número de procesos de conexión desde el último mensaje1)
Byte 2 Reservado
Bytes 3 y 4 Duración de la conexión en milisegundos
1) Los procesos de conexión ejecutados uno tras otro se resumen en una entrada

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 135
Evento de diagnosis 8: ConfiguraciónSe ha ejecutado una configuración/función de la puesta a punto.
Código de diagnosis (PNU 201)N.° Descripción
1 El firmware se ha actualizado
2 Reset de datos: Todos los datos de usuario y del controlador se han borrado
3 Prueba de movimiento ejecutada
4 Se ha ejecutado la identificación (estática)
5 Se ha ejecutado la identificación (estática y dinámica)
6 Identificación restablecida, los datos de identificación se han borrado
Información adicional (PNU 203)Info Descripción
Byte 1 = 1: Ejecución correcta
= 2: ejecución cancelada
Byte 2 Reservado
Bytes 3 y 4 Duración de la función en 0,1 segundos

4 Diagnosis y tratamiento de errores
136 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
4.4 Parametrización de mensajes de diagnosis
El PNU 228 permite parametrizar eventos de diagnosis.
PNU 228: Parametrización de eventos de diagnosisÍndice Descripción Valor predeterminado
1 Filtro de eventos de diagnosis 0x0000000F
2 Filtro de errores y advertencias 0x0000007F
3 Mensajes 0x000000C0
Tab. 4.17 Parametrización de los mensajes de diagnosis
Filtro de eventos de diagnosis
El filtro determina los eventos de diagnosis que deben registrarse. Con el PNU 228:01 pueden
seleccionarse eventos menos importantes para excluirlos del registro en la memoria de diagnosis.
PNU 228:01: Filtro de eventos de diagnosis¿Qué eventos, además de los errores, deben registrarse?
Bit Descripción Valorpredeter
minado
0 Registrar advertencias 1
1 Registrar eventos de configuración (restablecimiento de datos, identificación, etc.) 1
2 Registrar comandos de reset 1
3 Registrar procesos de conexión 1
4 ... 31 Reservado (=: 0) 0
Tab. 4.18 Parametrización de los mensajes de diagnosis – Filtro de eventos de diagnosis
Filtro de errores y advertencias
Con el filtro pueden seleccionarse errores y advertencias determinados para excluirlos del registro en
la memoria de diagnosis. Esto es apropiado para errores o advertencias que se consideran normales
dentro del ciclo de proceso, porque forman parte de él (errores de tensión de la carga) o porque se
producen con frecuencia debido a otras razones.
Atención: Aunque estos mensajes no se registran en la memoria de diagnosis, se indican en la situación
en la que se producen y deben confirmarse.

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 137
PNU 228:02 – Filtro de errores y advertencias¿Debe registrarse este error/advertencia en la memoria de diagnosis?
Bit Descripción Valorpredeterminado
0 W08: El cilindro, la válvula o la conexión de sensores se han cambiado 1
1 E35/W35: Posiciones finales por software sobrepasadas 1
2 W42: Bits de control reservados activados 1
3 E50/W50: Presión de funcionamiento demasiado baja 1
4 E51: Tensión de carga del controlador fuera del margen de tolerancia (subtensión) 1
5 W57: Timeout interfaz de diagnosis: El mando del equipo FCT se ha desactivado 1
6 W68: Preaviso de sobretemperatura en la válvula 1
7 ... 31 Reservado (=: 0) 0
Tab. 4.19 Parametrización de los mensajes de diagnosis – Filtro de mensajes
Configuración de reacción ante un errorAlgunos errores también pueden indicarse como advertencias. Esto ocurre sobre todo durante los
controles de las funciones, como el mantenimiento de las posiciones finales por software. En estos
errores, la reacción correcta depende a menudo de la aplicación.
Para los mensajes que admiten las dos reacciones se puede determinar el comportamiento del CMAX.
No todos los mensajes pueden parametrizarse individualmente, sino solo algunos cuya
parametrización se considera apropiada.
PNU 228:03 – Ajuste de reacción ante un error¿Qué errores deben tratarse como advertencia?
Bit Descripción Valorpredeterminado 1)
0 E27: La condición de conmutación progresiva no puede alcanzarse durante laorden de posicionamiento.
En caso de Advertencia: La frase se ejecuta como si no hubiese ningunaconmutación progresiva de frases parametrizada. La frase siguiente no seejecuta, el error E28 no se emite.
0
1 E28: No se ha alcanzado la condición de conmutación progresiva.En caso de advertencia: El CMAX se para en la frase cuya condición deconmutación progresiva no se ha alcanzado.
0
2, 3 Reservado (=: 0) 0
4 E32: Fuerza objetivo fuera de los límites de fuerza.En caso de advertencia: Al sobrepasarse, el CMAX limita la fuerza objetivo alvalor límite.
0
1) 0 = el mensaje se trata como error; 1 = el mensaje se trata como advertencia

4 Diagnosis y tratamiento de errores
138 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
PNU 228:03 – Ajuste de reacción ante un error¿Qué errores deben tratarse como advertencia?
Bit Valorpredeterminado 1)
Descripción
5 E33: Posición de destino fuera de las posiciones finales por software o porhardware.En caso de advertencia: Si la posición de destino va más allá de la posiciónfinal por software, se realiza un desplazamiento a la posición final porsoftware o por hardware (si las posiciones finales por software estándesactivadas).
0
6 E34: Valor nominal del modo de seguimiento fuera de los valores límite.En caso de advertencia: El valor nominal (posición o fuerza) se acepta solohasta alcanzar los valores límite. El eje se detiene en la posición final porsoftware o en el límite de fuerza. No se cancela el posicionamiento. Si el valornominal es menor que el valor límite, el CMAX desplaza el eje un poco más.
1
7 E35: Posición final por software sobrepasada.En caso de advertencia: El eje no se para y sigue ejecutando la orden deposicionamiento (no válido para la regulación de fuerza).
1
8 E50: Presión de funcionamiento demasiado baja.En caso de advertencia: El CMAX se comporta como si hubiese suficientepresión. Las órdenes de posicionamiento causan los errores E30 y E31.
1
9 E58: Inicio no permitido durante la habilitación de funcionamiento 0
10 ... 31 Reservado (=: 0) 0
1) 0 = el mensaje se trata como error; 1 = el mensaje se trata como advertencia
Tab. 4.20 Parametrización de los mensajes de diagnosis – Parametrización de mensajes

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 139
4.5 Diagnosis mediante funciones estándar del terminal CPX
Los errores y advertencias del CMAX o de los módulos conectados se comunican al nodo de bus como
mensajes de error de CPX. Las siguientes secciones contienen características especiales de la
representación para las posibilidades de diagnosis específicas de CPX.
– Datos I/O del módulo (bytes de control y de estado) � Sección 2.2
– Bits de estado � Sección 4.5.1
– Interfaz de diagnosis I/O � Sección 4.5.2
4.5.1 Bits de estado del terminal CPXEn Tab. 4.21 se muestran los mensajes de error del CMAX en los bits de estado del terminal CPX.
Bit Información de diagnosiscon señal 1
Descripción Causa del error del CMAX
0 Error en una válvula Tipo de módulo en –
1 Error en una salida
p
el que se ha
producido el error
–
2 Error en una entrada –
3 Error en un módulo
analógico/módulo de
tecnología
El bit 3 se activa para todos los errores
del CMAX.
4 Baja tensión Tipo de error –
5 Cortocircuito/sobrecarga –
6 Rotura de cable –
7 Otros errores –
Tab. 4.21 Cuadro general de bits de estado
4.5.2 Interfaz de diagnosis I/O y memoria de diagnosis
Por medio de la interfaz de diagnosis I/O y de la memoria de diagnosis del terminal CPX se puede
acceder a diferentes informaciones de diagnosis.
Datos de la memoria de diagnosis (CPX-MMI e interfaz de diagnosis I/O)La representación de mensajes de diagnosis del CMAX en la memoria de diagnosis del terminal CPX se
realiza como se indica en Tab. 4.22.

4 Diagnosis y tratamiento de errores
140 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Datos de la memoria de diagnosis (10 bytes por entrada, 40 entradas) N.º de función 1)
Byte Denominación Descripción Valor 3488 + n
1
2
3
4
5
Días [day]
Horas [h]
Minutos [m]
Segundos [s]
Milisegundos [10 ms]
Indicación de tiempo del error
producido, medido a partir del punto
en el que se ha conectado la
alimentación (estándar CPX).
0 ... 255
0 ... 23
0 ... 59
0 ... 59
0 ... 999
(128...227)
n = 10 * d + 0
6 Código de módulo Código de módulo del CMAX: 176 0 ... 255 n = 10 * d + 5
7 Posición de módulo
[Pos]
Número de módulo CPX que ha
comunicado el error.
0 ... 47 n = 10 * d + 6
8 Número de canal Bit 7 6 5 ... 0 descripción1 0 0 ... 0 error en el canal E 1
128
(0 ... 255)
n = 10 * d + 7
9 Número de error [FN] Número del error CPX
(� Sección 4.2.3)
90 ... 99
(0 ... 255)
n = 10 * d + 8
10 Siguientes canales Con CMAX siempre 0 0 (0 ... 63) n = 10 * d + 9
1) d (evento de diagnosis) [NB] = 0 ... 39; evento de diagnosis más corriente = 0
Tab. 4.22 Datos de la memoria de diagnosis del CMAX
Notas sobre la diagnosis con la interfaz de diagnosis I/O � Descripción del sistema CPX.
Ejemplo de entrada de memoria de diagnosis del error E50
Datos de la memoria de diagnosis ValorByte Denominación Descripción Dec Hex
1
2
3
4
5
Días [day]
Horas [h]
Minutos [m]
Segundos [s]
Milisegundos [10 ms]
El error se comunicó 22,66 ms después de conectar
se la fuente de alimentación (se activa el bit 7 del
byte 5 cuando se trata de la primera entrada tras
Power ON).
0d
0d
0d
22d
194d
00h
00h
00h
16h
C2h
6 Código de módulo Código de módulo del CMAX: 176 176d B0h
7 Posición de módulo
[Pos]
El CMAX es, en este caso, el módulo CPX nº 2. 2d 02h
8 Número de canal Bit 7 6 5 ... 0 descripción1 0 0 ... 0 error del eje 1
128d 80h
9 Número de error [FN] Número de error de CPX: 105 105d 69h
10 Siguientes canales Con CMAX siempre 0 0d 00h
Tab. 4.23 Ejemplo de entrada de memoria de diagnosis

4 Diagnosis y tratamiento de errores
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 141
Datos de diagnosis del módulo (interfaz de diagnosis I/O)La representación específica de los datos de diagnosis del módulo (mensajes de error) del CMAX se
realiza de acuerdo con Tab. 4.24 y Tab. 4.25.
Datos diagnosis del módulo: Tipo de error y lugar en el que ha surgido el error
N.º de función 2008 + m * 4 + 0; m = número de módulo (0 ... 47)
Descripción Describe dónde se ha producido el correspondiente error.
Valores Bit 7 6 5 ... 0 : Descripción1 0 000000 : Error en el canal 0 (eje 1)
Tab. 4.24 Tipo de error y lugar en el que ha surgido el error
Datos de diagnosis del módulo: Número de error del módulo
N.º de función 2008 + m * 4 + 1; m = número de módulo (0 ... 47)
Descripción Número de error
Valores 100 ... 108 Número de error CPX, (� Ejemplo Tab. 4.23)
Observación Mensajes de error del CMAX (� Sección 4.2.3).
Tab. 4.25 Números de error del módulo
4.5.3 Parametrización a través de la interfaz de diagnosis I/O
Normalmente, los parámetros pueden modificarse también por medio del nodo de bus CPX o de
funciones específicas de CPX-FEC como, p. ej., funcionamiento acíclico, etc. El acceso a los parámetros
del CMAX se realiza a través de la interfaz de diagnosis I/O (� Tab. 4.26).
Información detallada sobre la parametrización � Descripción del perfil de comunicación
del CMAX.
Número de función 1) Registro de parámetros
4828 + m*64 + 0 ... 5 Reservado (parámetros estándar de módulo, el CMAX no los utiliza)
4828 + m*64 + 6 Reservado para ajustes especiales de módulo del CMAX
4828 + m*64 + 7
4828 + m*64 + 8 ... 11 Control de tarea
4828 + m*64 + 12 ... 61 50 bytes de datos (dependen de la tarea).
4828 + m*64 + 62, 63 Reservado
1) m = número de módulo
Tab. 4.26 Interfaz de diagnosis I/O

4 Diagnosis y tratamiento de errores
142 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Más informaciones
Datos de diagnosis del módulo: Código de módulo
N.º de función 16 + m*16 + 0; m = número de módulo (0 ... 47)
Descripción Código de módulo CPX
Valores 176 = CPX-CMAX-C1-1
Tab. 4.27 Código de módulo
Datos de diagnosis del módulo: Código de revisión
N.º de función 16 + m*16 + 13; m = número de módulo (0 ... 47)
Descripción Estado de versión del módulo conforme a la placa de características.
Valores 0 ... 255
Tab. 4.28 Código de revisión
Después de actualizar el firmware la placa de características y la versión ya no coinciden.
Datos de diagnosis del módulo: Número de serie
N.º de función 784 + m*4 + 0; m = número de módulo (0 ... 47)
784 + m*4 + 1
784 + m*4 + 2
784 + m*4 + 3
Descripción Indica el número de serie del módulo (4 bytes, uint32).
Valores 0 ... 255
Tab. 4.29 Número de serie

5 Parametrización
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 143
5 Parametrización
5.1 Cuadro general Opciones de parametrización
Acceso/función Acceso mediante Descripción exhaustiva
LocalmenteCon PC (p. ej., durante la puesta a
punto)
FCT con plugin CMAX Ayuda del plugin CMAX para
FCT
Unidad de control de nivel superiorMediante datos I/O
FPC en los datos de entrada
y salida de módulo
Sección 5.4
Tab. 5.1 Opciones de parametrización
5.2 Protección de acceso
5.2.1 Protección por palabra claveLa protección con palabra clave impide un control o modificación no autorizados de los parámetros en
una instalación en producción. La palabra clave impide solo el acceso de escritura, la lectura es
siempre posible.
Existen 2 opciones para modificar los parámetros:
– a través de la interfaz de diagnosis, con un PC o FCT,
– a través del bus de campo con la unidad de control de nivel superior (datos I/O en el modo de
funcionamiento Parametrización).
En el CMAX puede asignarse una palabra clave para la interfaz de diagnosis. A través del bus de campo
pueden efectuarse modificaciones en cualquier momento. Tras la primera conexión (estado de entrega)
todavía no hay ninguna palabra clave registrada en el equipo.
Se bloquea la modificación de parámetros y el control de entradas, el inicio, la parada, la programación
tipo teach-in y la descarga de firmware. Se permite la visualización de los parámetros, la carga del
proyecto y la indicación de los valores reales, nominales y de diagnosis.
Los parámetros siguientes pueden modificarse a pesar de la protección con palabra clave:
PNU Parámetro Descripción de la causa
116 Project Identifier Reservado para el FCT (estado de sincronización)
130 Palabra clave Debe poder escribirse
133 Palabra clave del
sistema
Reservado para el FCT (reposición del CMAX en caso de “Palabra
clave olvidada”)
204:05 Número de en
tradas nuevas
Visualización en la memoria de diagnosis (valor de estado, ningún
parámetro en el plugin)
1173:01 Estado de los
valores límite
Para visualizar los valores límite (valor de estado, ningún parámetro
en el plugin)
Tab. 5.2 Parámetros que pueden escribirse sin palabra clave

5 Parametrización
144 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Crear una palabra clave con FCTLa protección mediante palabra clave se puede establecer con el plugin FCT CMAX cuando hay una
conexión online con el comando de menú [Component] [Password] (Componente) (Palabra clave)
� Ayuda del plugin FCT CMAX.
La palabra clave debe introducirse después al conectar por primera vez con el FCT. Esta permanece
activa hasta que el proyecto se cierra en el FCT.
Para cambiarla es necesario introducir la palabra clave antigua y borrarla. A continuación puede
introducirse y registrarse la palabra nueva.
Establecer una palabra clave con la unidad de control de nivel superior
PNU 130 contiene la palabra clave como cadena de caracteres. El parámetro PNU 1192.04 controla la
recepción y emite el estado actual. Para establecer una palabra clave para el CMAX:
1. Escribir la palabra clave en PNU 130, p. ej., PNU 130 = “Mi_palabra_clave”.
2. Activar PNU 1192:04 = 1 a fin de aceptar la palabra clave en los datos del equipo.
La palabra clave está implementada como cadena de caracteres en el CMAX y se compone de 8 bytes
(código ASCII: 32 a 127).
PNU 1192:04 Aceptar palabra claveAcceso Valores
Escritura = 0: Borrar palabra clave
= 1: Aceptar palabra clave
Lectura = 0: No hay ninguna palabra clave activada
= 1: Palabra clave activada y acceso libre
= 2: Palabra clave activada y acceso bloqueado
Tab. 5.3 Control del acceso con la palabra clave
La palabra clave no puede leerse ni reponerse. Si ha olvidado la palabra clave, el CMAX puede
reponerse por completo. Con esta operación se borran no solo los datos del eje, sino también los del
equipo. Esta reposición solo puede efectuarse mediante el FCT y no a través del control.

5 Parametrización
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 145
5.2.2 Acceso con unidad de control de nivel superior FCTEl manejo simultáneo del accionamiento por la unidad de control de nivel superior y el FCT puede
bloquearse. Para ello sirven los bits CCON.LOCK (acceso FCT bloqueado) y SCON.FCT_MMI (mando del
equipo FCT).
Bloqueo del manejo a través de FCT: CCON.LOCKAl activar CCON.LOCK la unidad de control de nivel superior puede impedir que el FCT asuma el mando
del equipo. En este caso el FCT no puede escribir parámetros ni controlar el accionamiento.
El control debe programarse de forma que no comunique el desbloqueo hasta que el usuario no realice
la acción correspondiente. Normalmente, se suele salir del funcionamiento automático. De este modo
el programador del control puede garantizar que el control siempre sepa cuándo tiene el control del
accionamiento.
El bloqueo está activo cuando CCON.LOCK tiene la señal 1.
Para permitir el acceso a componentes mediante distintos niveles de autorización, CCON.LOCK bloquea otras funciones a partir de la versión 2.2.
Acceso permitido Acceso no permitido
Leer memoria de diagnosis Modificación de parámetros
Leer error o advertencia actual Ejecutar reset de datos
Leer valores efectivos y nominales Ejecutar reinicio
Ejecutar Trace Confirmar error/advertencia existente
Tab. 5.4 Acceso con CCON.LOCK = 1
Los parámetros siguientes pueden modificarse a pesar de CCON.LOCK = 1:
PNU Parámetro Hasta FW 1.9 A partir de FW 2.2
116:01 … 33 Identificación del proyecto FCT Sí No
121:01 … 30 Nombre del equipo del usuario Sí No
130:01 … 30 Palabra clave Sí Sí
133:01 … 02 Palabra clave del sistema Sí No
204:05 Número de entradas sin leer Sí No
407:01 … 128 Aceleración de frase Sí No
408:01 … 128 Deceleración de frase Sí No
410:01 … 128 Carga útil de frase Sí No
1150:01 Controlador de posición: Factor de amplificación Sí No
1151:01 Controlador de posición: Factor de amortiguación Sí No
1152:01 Controlador de posición: Factor de filtro Sí No
1160:01 Controlador de fuerza: Factor de amplificación Sí No
1161:01 Controlador de fuerza: Amplificación dinámica Sí No
1162:01 Controlador de fuerza: Factor de filtro Sí No
1173:01 Valores de limitación: Estado Sí Sí
1192:04 Funciones de la puesta a punto: Estado de palabra
clave
Sí No
Tab. 5.5 Parámetros que se pueden escribir con CCON.LOCK = 1

5 Parametrización
146 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Acuse de recibo del control de nivel superior con FCT: SCON.FCTSCON.FCT indica que el accionamiento se controla a través del FCT y que no es posible controlar el
accionamiento a través de los datos I/O. Una posible reacción de la unidad de control de nivel superior
es la transición al funcionamiento de parada o manual.
5.2.3 Bloqueo dependiente del estado y del modo de funcionamiento
Este bloqueo está previsto para proteger contra errores de operación en la fase de funcionamiento.
Durante el funcionamiento no está permitido modificar parámetros del accionamiento que puedan
afectar al controlador. Para ello se conmuta al modo Puesta a punto (o Parametrización si se utilizan
los datos cíclicos I/O). Estos datos se documentan como datos de puesta a punto. Con cada parámetro
se indica el estado operativo necesario.
Para escribir un parámetro de la puesta a punto:
– debe estar activo el modo “Puesta a punto” o “Parametrización”
– el accionamiento tiene que estar bloqueado (CCON.ENABLE = 0)
5.2.4 Desbloqueo y parada durante la parametrización
La parametrización en los datos I/O cíclicos solo puede tener lugar si el CMAX no se encuentra en el
estado “Funcionamiento habilitado” (CCON.ENABLE = 0). Los parámetros de la puesta a punto
requieren que el controlador esté bloqueado al escribir.
Para transmitir parámetros es necesario que CCON.STOP y CCON.ENABLE estén activados como se
describe.
Modo de funcionamiento
Lectura: CCON1) Escritura: CCON1)
.ENABLE .STOP .ENABLE .STOP
Modo de frase x x x x
Modo directo x x x x
Puesta a punto x x 0 x
Parametrización x 0 0 / x 2) x / 0 2)
1) x = No afecta a la parametrización
2) En los parámetros de la puesta a punto tiene que activarse CCON.ENABLE = 0; CCON.STOP puede tener cualquier estado
Tab. 5.6 Efecto de la transmisión de parámetros a CCON

5 Parametrización
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 147
5.3 Valores predeterminados globales
Con los valores predeterminados globales pueden especificarse parámetros globales de
posicionamiento (velocidad, aceleración, tolerancia, etc.). Los valores predeterminados globales
sustituyen a los parámetros individuales para una orden de posicionamiento en el modo de frase,
modo directo, recorrido de referencia o actuación secuencial.
Tabla de frases
PNU403
Valor predet.
PNU404
Valornominal
PNU406
Velocidad
PNU407
Aceleración
PNU408
Decel.
PNU410
Carga útil
PNU411
Tolerancia
PNU412
R. fuerza
PNU540
Velocidad
PNU545
Tolerancia
PNU544
Carga útil
PNU542
Decel.
PNU541
Aceleración
PNU405
Preselección
PNU402
RCB2
Posición en modo directo Fuerza en modo directo
PNU550
R. fuerza
PNU554
Velocidad
PNU552
Tolerancia
PNU551
Carga útil
Actuación secuencial
PNU531
Velocidad
PNU536
Carga útil
PNU533
Decel.
PNU532
Aceleración
Valores predeterminados globales
PNU 600Velocidad posición
PNU 601Velocidad fuerza
PNU 602Aceleración
PNU 603Deceleración
PNU 605Carga útil
PNU 607Tolerancia fuerza
PNU 606Tolerancia posición
PNU 608Rampa de fuerza
PNU401
RCB1
Recorrido dereferencia
PNU1134
Carga útil
PNU521:04
PNU521:01PNU521:03PNU521:02
PNU403:nn
Fig. 5.1 Efecto de los valores predeterminados globales
Si, por ejemplo, todas las frases de una aplicación deben avanzar con la misma aceleración, no es
necesario introducir cada vez el mismo valor en la lista de posiciones. En su lugar, en la tabla de frases
se remite al valor predeterminado global. Para utilizar otros valores diferentes a los valores
predeterminados globales en una frase individual, los valores deseados para el parámetro de frase se
introducen solo en dicha frase.
De serie, los parámetros del modo de frase y del modo directo se definen de manera que pueden uti
lizarse los valores predeterminados globales en vez de los parámetros.
Ventajas:
– Se simplifica la introducción de los valores.
– Aumento del rendimiento en la transmisión de datos, ya que se transmiten menos datos.

5 Parametrización
148 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
¿Cuándo se utiliza un valor predeterminado global?Una marca define en cada parámetro si se va a utilizar el valor predeterminado global. Para utilizar el
valor de la frase o el parámetro especial, la marca debe ajustarse en 1. De lo contrario se utiliza el valor
predeterminado. Los parámetros siguientes contienen marcas para los valores predeterminados
globales:
Tipo de posicionamiento PNU Índice Parámetro
Modo de frase 403 nn (n.º frase) Valor predeterminado de frase
Actuación secuencial 521 01 Valor predeterminado de actuación
secuencial
Modo directo posición 521 02 Valor predeterminado modo directo
posición
Modo directo fuerza 521 03 Valor predeterminado modo directo
fuerza
Recorrido de referencia 521 04 Valor predeterminado recorrido de
referencia
Tab. 5.7 Control de los valores predeterminados globales
Control de parámetrosBit PNU 403: Valores predeterminados de frase PNU 521: Valores predeterminados
de actuación secuencial, modo direc
to, recorrido de referencia
31 = 0: La frase está bloqueada
= 1: La frase está activa
No se evalúa
30 = 0: Frase no inicializada o se ha borrado
= 1: Frase inicializada por el usuario
No se evalúa
0 ... 29 Campo de bits, controla la recepción de los valores predeterminados (� Tab. 5.9).
= 0: Utilizar los valores predeterminados
= 1: Utilizar el parámetro de la tabla de frases o los datos para el modo directo
Tab. 5.8 Marcas para el control de parámetros

5 Parametrización
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 149
Parámetros utilizados en función del estado de bitsBit Parámetro Bit = 0 Bit = 1
Modo de
frase
Actuación
secuen
cial
Modo
directo
posición
Modo
directo
fuerza
Recorrido
de
referencia
0 Velocidad de posición 600 406 5311) 540 – –
1 Velocidad de fuerza 601 406 – – 554 –
2 Aceleración 602 407 5321) 541 – –
3 Deceleración 603 408 5331) 542 – –
4 – (Reservado) – – – – – –
5 Carga útil 605 410 536 544 551 1134
6 Tolerancia de posición 606 411 – 545 – –
7 Tolerancia de fuerza 607 411 – – 552 –
8 Rampa de fuerza 608 412 – – 550 –
9 ... 29 – (Reservado) – – – – – –
1) FCT no permite los valores predeterminados 600, 602 y 603 para la actuación secuencial, solo los valores especiales 531, 532 y 533
� Fig. 5.1.
Tab. 5.9 Parámetros utilizados
¿Cómo se efectúa la evaluación?La evaluación se realiza al arrancar. Cuando se utiliza el perfil libre, el CMAX comprueba para cada
parámetro de valor nominal si debe emplearse el valor predeterminado global o el parámetro
individual. Los valores individuales de parámetro deben utilizarse cuando en los valores
predeterminados de frase (PNU 403) o de actuación secuencial y modo directo (PNU 521) el bit
correspondiente está en 1.

5 Parametrización
150 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
EjemploHay que transportar 2 tipos de productos a granel hasta un punto de recolección y vaciarlos allí.
1 2 3 4
1 Posición 1: 20 mm (“Esperar”)2 Posición 2: 75 mm (“Cargar 1”)
3 Posición 3: 145,50 mm (“Cargar 2”)4 Posición 4: 205,20 mm (“Vaciar”)
Fig. 5.2 Ejemplo de cargas de masa diferentes
Paso Tarea
1 Esperar el inicio en una posición de espera para recoger el producto a granel. Al arrancar,
el carro avanza vacío desde la posición inicial 1 con los valores predeterminados
globales hasta la primera posición de carga 2.
2 Con carga de masa aumentada (12 kg) el carro se desplaza a la segunda posición de
carga 3. La aceleración y la velocidad pueden coincidir con los valores predeterminados
globales.
3 El recipiente lleno (25 kg) se desplaza hasta la posición de descarga 4. Los valores de la
velocidad y de la aceleración deben reducirse debido a que el recipiente está lleno.
4 Desde la posición de descarga 4 puede volver a la posición inicial 1 a velocidad plena.
Tab. 5.10 Ejemplo de valores predeterminados globales: Pasos
Para resolver esta tarea se especifican primero los valores predeterminados globales siguientes. La
regulación de fuerza no es necesaria; los valores no se tienen en cuenta.
Parámetro PNU Valor Comentario
Velocidad 600 1000 (= 1 m/s) No deben utilizarse los valores máximos
posibles de los datos de la identificación.Aceleración 602 1000 (= 1 m/s2)
Rampa de frenado 603 1000 (= 1 m/s2)
Carga útil 605 0 (= 0 kg) En estado normal no hay carga útil
Tolerancia 606 50 (= 0,5 mm) Tolerancia = 0,5 mm
Tab. 5.11 Ejemplo de valores predeterminados globales: Fijar valores predeterminados

5 Parametrización
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 151
Tabla de frases: No es necesario parametrizar explícitamente los campos vacíos de la tabla de frases.
Los bytes de control de frase 1 y 2 pueden utilizarse como estaban ajustados previamente.
N.ºde
frase
RCB1 RCB2 Valorpredet.
(Low word)
Valornomi
nal
Preselección
Velocidad
Aceler. Decel. Cargaútil
Tolerancia
Rampafuerza
Bit 0
0001h
Bit 2
0004h
Bit 3
0008h
Bit 5
0020h
Bit 6
0040h
Bit 8
0100h
1 C000 0000h 7500
2 C000 0020h 14550 120
3 C000 002Dh 20520 400 200 200 250
4 C000 0000h 2000
Tab. 5.12 Ejemplo de valores predeterminados globales: Tabla de frases
Con esta tabla de frases y los valores predeterminados globales el accionamiento ejecuta realmente el
siguiente movimiento:
Paso Inicio Destino Velocidad Aceleración Decel. Carga útil Tolerancia
1 20,0 mm 75,0 mm 1,0 m/s 1,0 m/s2 1,0 m/s2 0,0 kg 0,5 mm2 75,0 mm 145,5 mm 1,0 m/s 1,0 m/s2 1,0 m/s2 12,0 kg 0,5 mm3 145,5 mm 205,2 mm 0,4 m/s 0,2 m/s2 0,2 m/s2 25,0 kg 0,5 mm4 205,2 mm 20,0 mm 1,0 m/s 1,0 m/s2 1,0 m/s2 0,0 kg 0,5 mm
Tab. 5.13 Ejemplo de valores predeterminados globales: Movimientos ejecutados

5 Parametrización
152 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
5.4 Canal de parámetros Festo (FPC)
El FPC sirve para transferir parámetros. La unidad de control de nivel superior envía una tarea al CMAX
compuesta por un número de parámetro, un subíndice, un valor y un identificador de tarea. El CMAX
responde con el PNU, el subíndice, el valor y un identificador de respuesta. Este procedimiento dura
varios ciclos de bus.
Después de conmutar al modo Parametrización el FPC asina los bytes de control y de estado del CMAX
� Sección 2.2.6.
FPCByte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Tarea CPOS Subíndice Parameter Identifier Parameter Value
Respuesta SPOS Subíndice Parameter Identifier Parameter Value
Tab. 5.14 Estructura del FPC
Parameter IdentifierBit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Tarea Request Identifier Parameter Number
Respuesta Response Identifier Parameter Number
Tab. 5.15 Estructura del identificador de parámetros
Elemento Abreviación Descripción
Parameter Identifier ParID Identificador de 16 bits, compuesto por ReqID/ResID y un
número de parámetro.
Request Identifier ReqID Request Identifier - Identificador de tarea:
leer valor, modificar valor, etc.
Response Identifier ResID Response Identifier – identificador de respuesta
valor transferido, error, ...
Parameter Number PNU Parameter Number - Para direccionar un parámetro.
Subíndice IND Subindex - Para direccionar un elemento de matriz (array).
Parameter Value Value Valor de parámetro (en caso de error, el número de error
como respuesta).
Tab. 5.16 Elementos del FPC

5 Parametrización
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 153
5.4.1 Identificadores de tarea, identificadores de respuesta y números de error
Descripción ReqIDTarea
ResID (+)con respuesta
ResID (–)con error
Sin tarea 0 0 0
Leer el valor de parámetro 6 5 7
Cambiar el valor de parámetro 8 5 7
Tab. 5.17 Identificadores de tarea y de respuesta (Request y Response Identifiers)
Reglas:
– Los datos son del tipo entero, carácter (char) y campo de bits.
– Todos los valores de parámetro se transmiten como valores de 32 bits.
– Una cadena de caracteres es una matriz compuesta por caracteres que pueden transmitirse sólo
individualmente a través del canal cíclico. El valor NUL (= 0x00) se interpreta como final de cadena
de caracteres. Una unidad de control de nivel superior debe transmitir siempre el cero como último
valor.
– Las variables simples no tienen subíndice.
El subíndice transmitido puede adoptar los valores 0 y 1. El valor 0 equivale a “No utilizado”. Es
recomendable activar el subíndice en 1, como si el parámetro fuese una matriz con un elemento.
Los valores > 1 se rechazan con el error 3.
Error Descripción del error
0 PNU no permitido
1 El valor del parámetro no puede modificarse.
2 Valor límite inferior o superior excedido.
3 Subíndice no válido
11 Sin control de nivel superior. El FCT debe asumir el mando del equipo para poder escribir
este parámetro.
Este error solo puede generarse a través de la interfaz de servicio o de red.
12 La palabra clave introducida es incorrecta.
17 Tarea no ejecutable debido al estado operativo. Compruebe el modo de funcionamiento,
la parada y las señales de desbloqueo.
101 ID de tarea no compatible.
102 El parámetro no puede leerse (palabra clave).
103 El sistema de medida todavía no se ha configurado. No es posible acceder al parámetro.
104 El tipo de cilindro todavía no se ha configurado. No es posible acceder al parámetro.
105 El sistema de medida ya se ha configurado y no puede modificarse sin reset de datos.
106 El tipo de cilindro no puede modificarse porque no coincide con el sistema de medida.
107 El valor no puede modificarse porque hay datos de identificación. Restablezca los datos
de identificación antes de escribir el valor.

5 Parametrización
154 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Error Descripción del error
108 El valor de parámetro no coincide con el hardware detectado.
109 Los números de serie no pueden cambiarse hasta que no se restablecen los datos de
identificación
Tab. 5.18 Números de error en la transferencia de parámetros
5.4.2 Características del sistema de medida
El acceso al sistema de medida se efectúa conforme a las reglas especiales siguientes.
Información detallada sobre el sistema de medida � Sección B.1.
– El sistema de medida no puede cambiarse a voluntad. Para cambiarlo, los datos de
eje deben restablecerse.
– El tipo de cilindro debe transmitirse después de determinar el sistema de medida
(métrico/imperial). De ese modo, el tipo de movimiento se determina como de tras
lación o de rotación.
– Una vez determinados el sistema de medida y el tipo de movimiento, puede accederse
a los PNU mayores de 300 (excepciones: PNU 1100, 1190).

5 Parametrización
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 155
5.5 Parametrización cíclica en el modo de funcionamientoParametrización
Con el FPC puede transmitirse respectivamente un parámetro a los datos cíclicos I/O en el modo de
funcionamiento Parametrización.
La unidad de control de nivel superior introduce la tarea en los datos de salida y espera a que el CMAX
introduzca una respuesta en los datos de entrada. Este procedimiento dura varios ciclos de bus.
FPC en los datos cíclicos I/O (� Asignación de I/O en la sección 2.2.6)Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Datos O CCON Subíndice Parameter Identifier Parameter Value
Bytes de tarea 1 ... 7 del FPC (� Sección 5.4, Tab. 5.14)
Datos I SCON Subíndice Parameter Identifier Parameter Value
Bytes de respuesta 1 ... 7 del FPC (� Sección 5.4, Tab. 5.14)
Tab. 5.19 FPC en los datos cíclicos I/O
En el primer byte se transmite el byte de control CCON, con el que se controla el modo de
funcionamiento y la habilitación del accionamiento. El CMAX responde con el byte de estado SCON.
El bit CCON.STOP no debe activarse porque el CMAX no puede cambiar al estado “Funcionamiento
desbloqueado” en el modo de funcionamiento “Parametrización”. CCON.STOP = 1 genera una
advertencia.
Algunos parámetros solo se pueden escribirse en el estado “Accionamiento bloqueado”
(CCON.ENABLE = 0).

5 Parametrización
156 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
5.5.1 Ejemplo de parametrizaciónEl siguiente ejemplo puede servir a los programadores como orientación para la implementación.
Ejemplo
Escribir posición nominalRegistro 3 = 27.89 mm
Parameter request (PLC output Data)
ReqID = 8 (= escribir valor)PNU = 404 (= valor nominal tabla de frases)IND = 3 (= frase 3)Value = 27.89 * 100 = 2789
Parameter response (PLC input Data)
ResID = 5 (= valor ha sido transmitido)PNU = 404 (= valor nominal tabla de frases)IND = 3 (= frase 3)Value = 2789
Fig. 5.3 Ejemplo de parametrización
Operaciones preliminares a la parametrización
Establecimiento del estado para cambiar de modo de funcionamientoEstá permitido cambiar el modo de funcionamiento en los estados “Accionamiento bloqueado”,
“Accionamiento desbloqueado” o “Error”.
Ejemplo con el estado “Accionamiento habilitado”.
Asignación de los bytes de control (operaciones preliminares al cambio de modo de funcionamiento)Bit B7 B6 B5 B4 B3 B2 B1 B0
CCONByte 1
OPM2 OPM1 LOCK – RESET BRAKE STOP ENABLE
x x x 0 x x 0 x
...Bytes 2...8
Sin relevancia
Recomendación: poner en 0
Acuse de recibo del CMAX: Comprobar el estado operacional en el byte de estado. SCON.READY tiene
que ser 0.
Asignación de los bytes de estado (operaciones preliminares al cambio de modo de funcionamiento)Bit B7 B6 B5 B4 B3 B2 B1 B0
SCONByte 1
OPM2 OPM1 FCT 24VL FAULT WARN READY ENABLED
x x 0 x x x 0 x
...Bytes 2...8
Sin relevancia
Cambio al modo de funcionamiento Parametrización
Está permitido cambiar el modo de funcionamiento en los estados “Accionamiento bloqueado”,
“Accionamiento desbloqueado” o “Error”.
Ejemplo con el estado “Accionamiento habilitado”.
Asignación de los bytes de control (cambio al modo de funcionamiento Parametrización)Bit B7 B6 B5 B4 B3 B2 B1 B0
CCONByte 1
OPM2 OPM1 LOCK – RESET BRAKE STOP ENABLE
1 1 x 0 x x 0 x
...Bytes 2...8
Poner en 0
Acuse de recibo del CMAX: Modo de funcionamiento Parametrización. SPOS.OPM1 y OPM2 deben estar
en 1.

5 Parametrización
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 157
Asignación de los bytes de estado (cambio al modo de funcionamiento Parametrización)Bit B7 B6 B5 B4 B3 B2 B1 B0
SCONByte 1
OPM2 OPM1 FCT 24VL FAULT WARN READY ENABLED
1 1 x x x x 0 x
...Bytes 0...8
= 0
Ejecución de la parametrizaciónPaso 1: Preparar parametrización con “No request”
Asignación de los bytes de control (paso 1)Bit B7 B6 B5 B4 B3 B2 B1 B0
R
CCONByte 1
OPM2 OPM1 LOCK – RESET BRAKE STOP ENABLE
1 1 x 0 x x 0 x
SubíndiceByte 2
Subíndice del parámetro a transmitir = 0
0 0 0 0 0 0 0 0
Identif. parámet
roBytes 3 y 4
PNU = 0
0 0 0 0 0 0 0 0
ReqID = 0 PNU = no relevante (0000 0000 0000b)
0 0 0 0 0 0 0 0
Valor parám.
Bytes 5...8
Valor del parámetro a transmitir = 0
Esperar al acuse de recibo del CMAX: “No request”.
Asignación de los bytes de estado (paso 1)Bit B7 B6 B5 B4 B3 B2 B1 B0
R
SCONByte 1
OPM2 OPM1 FCT 24VL FAULT WARN READY ENABLED
1 1 x x x x 0 x
SubíndiceByte 2
Subíndice del parámetro a transmitir = no relevante
0 0 0 0 0 0 0 0
Identif. parámet
roBytes 3 y 4
PNU = no relevante
0 0 0 0 0 0 0 0
ResID = 0 (0000b) PNU = 0
0 0 0 0 0 0 0 0
Valorparám.
Bytes 5...8
Valor del parámetro transmitido: No relevante

5 Parametrización
158 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Paso 2: Transmitir el parámetro
Asignación de los bytes de control (paso 2)Bit B7 B6 B5 B4 B3 B2 B1 B0
R
CCONByte 1
OPM2 OPM1 LOCK – RESET BRAKE STOP ENABLE
1 1 x 0 x x 0 x
SubíndiceByte 2
Subíndice del parámetro a transmitir: 3 (0x03)
0 0 0 0 0 0 1 1
Identif. parámetro
Bytes 3 y 4
PNU = 404 (0x0194 = 0001 1001 0100b)
1 0 0 1 0 1 0 1
ReqID = 8 (0x08) PNU = 404 (0x0194 = 0001 1001 0100b)
1 0 0 0 0 0 0 1
Valor parám.
Bytes 5...8
Valor del parámetro a transmitir: 2789
(0x00000AE5, cifra de 32 bits)
Comprobación del acuse de recibo del CMAX:
1. Si ResID = 0: El parámetro todavía no se ha procesado.
Esperar.
2. Si ResID = 7: Tratamiento de errores (p. ej. evaluar número de error, PNU, comprobar subíndice o
valor)
3. Si ResID = 5: Terminar la espera.
Asignación de los bytes de estado (paso 2)Bit B7 B6 B5 B4 B3 B2 B1 B0
R
SCONByte 1
OPM2 OPM1 FCT 24VL FAULT WARN READY ENABLED
1 1 x x x x 0 x
SubíndiceByte 2
Subíndice del parámetro transmitido: 3 (0x0003 0000 0011b)
0 0 0 0 0 0 1 1
Identif. parámet
roBytes 3 y 4
PNU = 404 (0x0194 = 0001 1001 0100b)
1 0 0 1 0 1 0 1
ResID = 5 (0x05 = 0101b) PNU = 404 (0x0194 = 0001 1001 0100b)
0 1 0 1 0 0 0 1
Valor parám.
Bytes 5...8
Valor del parámetro transmitido: 2789
(0x00000AE5, 32-Bit-Zahl)
Paso 3: Finalizar la parametrización con “No Request”Véase el paso 1.

5 Parametrización
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 159
5.5.2 Diagrama de flujo
Send “No request”
Paso 1Asegurarse de que la tarea deparámetro anterior ha finalizadoenviando “No request”.
Start
Wait Answer
Set in output data:Value = 0IND = 0PNU = 0ReqID = 0Input data:
(ResID ≠ 0) OR(PNU ≠ 0) OR(IND ≠ 0)
Input data:(ResID = 0) AND(PNU = 0) AND(IND = 0)
Send ParameterRequest
Wait Answer
Set in output data:Value = 2789IND = 3PNU = 404ReqID = 8
ResID = 0
ResID ≠ 0
Check Error
ResID = 5
Send “No request”
Set in output data:Value = 0IND = 0PNU = 0ReqID = 0
Error Handling (Check PNU,IND, Value)
Paso 2Ajustar la tarea de parámetrodeseada en los datos de salida(Request Value, IND, PNU y ReqID).El CMAX envía “No Answer” hastaque puede proporcionar larespuesta del parámetro.Si el CMAX no puede procesar latarea, se indica ResID = 7. En estecaso, el valor de la respuesta incluyeel número de error.
ResID = 7(Error)
Paso 3Envío de “No Request” después deevaluar la respuesta.
End
Fig. 5.4 Diagrama de flujo para la parametrización

5 Parametrización
160 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
5.6 Parámetros del módulo CPX
Por cada módulo CPX se reservan 64 bytes de parámetros de módulo (n.º de función: 4828 + m*64 +
0...63) en la tabla del sistema.
Parámetros del módulo CPX del CMAX
N.º de función Contenido Descripción
4828 + m * 64 + 0 Parámetro de módulo 0 Reservado (parámetros estándar de módulo, el
CMAX no los utiliza ni los transmite)4828 + m * 64 + ... Parámetro de módulo ...
4828 + m * 64 + 5 Parámetro de módulo 5
4828 + m * 64 + 6 Configuración de módulo 1 Reservado (= 0 no utilizado por el CMAX)
4828 + m * 64 + 7 Configuración de módulo 2
4828 + m * 64 + 8 Byte 8 Reservado
4828 + m * 64 + ... Byte ...
4828 + m * 64 + 63 Byte 63
Tab. 5.20 Parámetros del módulo CPX del CMAX
El formato de datos del módulo se determina mediante el parámetro “Valor analógico del formato de
datos” en el CPX, si es compatible con el nodo CPX (� Sección 1.2).

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 161
A Notas sobre la puesta a punto, asistencia técnica yfirmware
A.1 Operaciones preliminares y resumen de la puesta a punto
A.1.1 Comprobación del ramal de eje
Antes de la puesta a punto:
� Comprobar la estructura completa del sistema, en especial el conexionado de tubos del accionam
iento y la instalación eléctrica � Descripción del sistema CMAX.
A.1.2 Conexión de la alimentación y comportamiento al arranque
Advertencia¡Elevadas fuerzas de aceleración de los actuadores conectados! Los movimientos no
deseados pueden provocar colisiones y causar lesiones graves.
� Conexión:Conectar siempre primero la fuente de alimentación y, a continuación, la
alimentación de aire comprimido.
� Desconexión:Antes de realizar trabajos de montaje, instalación y mantenimiento deben
desconectarse las alimentaciones de aire comprimido y de tensión simultáneamente
o bien en el siguiente orden:
1. Alimentación de aire comprimido
2. Alimentación de tensión de funcionamiento de la electrónica/sensores
3. Alimentación de tensión de carga salidas/válvulas
Realizar los trabajos en la zona de la máquina únicamente cuando las
alimentaciones de aire comprimido y de tensión estén desconectadas y bloqueadas.
Estado de suministro (primera conexión o tras reset de los datos del eje o del equipo)
– Los componentes conectados (válvula, sistema de medición del recorrido, conexión de sensores) se
buscan automáticamente en la conexión de eje y se lee la información contenida.
– Los componentes detectados no se aceptan automáticamente como estado nominal.
– Sin parametrización completa1) de la configuración del accionamiento no se puede activar el
controlador. Los valores reales no se actualizan.
Arranque convencional– Los componentes conectados (válvula y sistema de medición del recorrido o conexión de sensores)
se buscan automáticamente en la conexión de eje y se lee la información contenida.
– La configuración nominal encontrada se compara con la configuración actual. Si hay alguna
discrepancia, se produce un error y no se activa el controlador. El error solo se puede confirmar tras
una parametrización 1).
1) “Parametrización ejecutada”: Todos los parámetros del área de configuración del accionamiento (con DNCI también recorrido de
referencia) contienen datos importantes.

A Notas sobre la puesta a punto, asistencia técnica y firmware
162 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Parámetros detectablesEl CMAX detecta automáticamente todos los parámetros que están guardados en el accionamiento, en
la válvula, en el sistema de medición de recorrido o en la conexión de sensores. El plugin para FCT
puede leer estos valores en el CMAX, no es necesario que estén en el proyecto del FCT. Los datos
detectados no pueden sobrescribirse.
Restablecer los datos del eje
Con un reset de los datos del eje (� Apéndice A.3.4) los datos de eje del CMAX se restablecen al
estado de entrega. En este estado, el CMAX no contiene ninguna configuración nominal. Para activar el
controlador es necesaria una parametrización.
Configuración sin hardware
El CMAX también puede configurarse sin componentes conectados. Esto permite montar en una
máquina un CMAX parametrizado previamente, p. ej. como repuesto, y ponerlo a punto sin PC/FCT.
Si se efectúa una configuración sin componentes, deben introducirse todos los datos. Una vez
conectados la válvula y el sistema de medición de recorrido o la conexión de sensores, el CMAX detecta
automáticamente el hardware al conectar. Si la configuración nominal coincide con la configuración
real, el usuario puede ejecutar la prueba de movimiento. Al hacerlo, los números de serie de los
componentes se transmiten automáticamente a la configuración nominal.
Nota: Después de la configuración, el CMAX comunicará el error E43 hasta que se haya conectado un
hardware.
Modo de configuraciónPara identificar el estado de la configuración, en la pantalla se visualizase visualizan los estados C00 ...
C03 (también se puede consultar mediante la lectura del PNU 1192:02). Estos estados identifican
respectivamente la próxima acción necesaria.
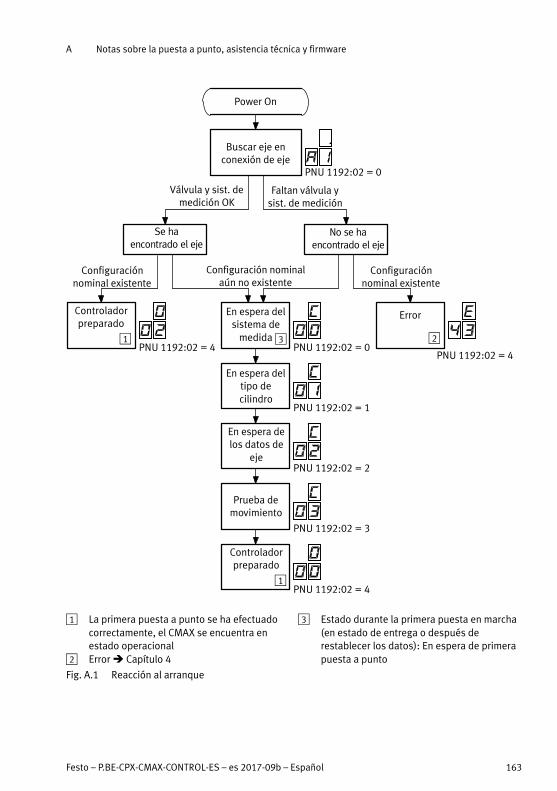
A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 163
Buscar eje enconexión de eje
Power On
Faltan válvula ysist. de medición
Válvula y sist. demedición OK
Se haencontrado el eje
No se haencontrado el eje
Configuración nominalaún no existente
Configuraciónnominal existente
Configuraciónnominal existente
En espera delsistema de
medida
Controladorpreparado
PNU 1192:02 = 4 PNU 1192:02 = 0
Error
PNU 1192:02 = 4
En espera deltipo decilindro
PNU 1192:02 = 1
En espera delos datos de
ejePNU 1192:02 = 2
Prueba demovimiento
PNU 1192:02 = 3
Controladorpreparado
PNU 1192:02 = 4
PNU 1192:02 = 0
1 23
1
1 La primera puesta a punto se ha efectuadocorrectamente, el CMAX se encuentra enestado operacional
2 Error � Capítulo 4
3 Estado durante la primera puesta en marcha(en estado de entrega o después derestablecer los datos): En espera de primerapuesta a punto
Fig. A.1 Reacción al arranque

A Notas sobre la puesta a punto, asistencia técnica y firmware
164 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Descripción de los estados
PNU 1192:02 = 0
Se están buscando la válvula y el sistema de medición de recorrido.
Este proceso dura 3 segundos como máximo.
PNU 1192:02 = 0
El CMAX no ha encontrado ninguna configuración nominal. El sistema de
medida todavía no se ha configurado.
El usuario debe determinar primero el sistema de medida que debe
utilizarse. Mientras no hay ningún sistema de medida configurado, el acceso
a los parámetros de eje es limitado, porque el CMAX no sabe cómo escalar
los parámetros. El acceso se limita a datos de diagnosis y a los datos
requeridos para determinar el sistema de medida.
El sistema de medida se determina con PNU 1192:05.
En este estado puede accederse a los datos siguientes:
PNU:IND Acceso Descripción
1xx
2xx
Lectura/escritura Datos de equipo: Determinar nombre de equipo, números
de versiones
Datos de diagnosis: Leer mensaje actual
1190:01
1190:05
1190:11
Lectura Detección de hardware:
Tipo de cilindro, de sensor, de válvula
1192:03 Lectura/escritura Ejecutar reset de datos
1192:05
1192:06
Lectura/escritura
Lectura
Sistema de medida
Tabla de sistema de medida
Tab. A.1 Acceso a los parámetros en el estado C00

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 165
PNU 1192:02 = 1
El sistema de medida se ha determinado. El CMAX espera a que se determine
el tipo de cilindro.
Ahora ya está fijado si utilizar el sistema de medida métrico o imperial. Si
embargo, todavía no es posible escalar los parámetros, aún falta especificar
la diferencia entre movimiento de traslación (actuador lineal) o de rotación
(actuador giratorio). Para ello debe escribirse el tipo de cilindro (PNU 1100).
El tipo de cilindro determina la tabla de sistema de medida utilizada
realmente (� PNU 1192:06).
PNU 1192:02 = 2
El sistema de medida y el tipo de cilindro se han determinado correctamente.
El CMAX espera a que se escriban los parámetros de eje.
El hardware detectado ha sido escalado. Se han creado datos
predeterminados útiles en el sistema de medida. Puede accederse a todos
los parámetros, es decir, ahora puede leerse la longitud detectada del
cilindro, del sistema de medición, etc.
A continuación debe transmitirse la configuración del eje (Download).
PNU 1192:02 = 3
La parametrización básica ha terminado. El eje ya puede utilizarse.
Puede realizarse una prueba de movimiento. En ella se comprueba si el
conexionado de tubos del accionamiento es correcta.
La prueba de movimiento puede ignorarse escribiendo el PNU 1192:07 = 2
(no recomendado).
Errores en la puesta a puntoEn Fig. A.1 solo se muestran las líneas básicas para representar el principio general.
Si, p. ej., solo se encuentra un componente (sistema de medición de recorrido/conexión de sensores o
válvula), se genera el error E60 o E80, porque ello permite suponer que se trata de una anomalía. Antes
o durante la puesta a punto existen otras posibilidades de error, p. ej.
– tensión de funcionamiento insuficiente E52,
– error de memoria E7x,
– accionamiento habilitado antes de alcanzar el estado C03 (causa un error E05).
Para obtener más información sobre el indicador del estado � Descripción del
sistema CMAX.

A Notas sobre la puesta a punto, asistencia técnica y firmware
166 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
A.2 Puesta a punto a través de la unidad de control de nivel superior
A.2.1 C00: Parametrización básica
Esta sección contiene instrucciones paso a paso para la parametrización básica. La Fig. A.2 muestra un
cuadro general del procedimiento. Para su comprensión se requiere conocer la descripción de los
estados C00 a C03 (� Sección A.1.2, Fig. A.1).
CMAX en estado de entrega 1)
Activar modo Parametrización
1 = métrico2 = imperial
Ajustar el sistema de medida:PNU 1192:05 = 1 ... 2
Determinar tipo accionamiento: PNU 1100:00 = 1 ... 7
Descarga de bloques de datos ONPNU 1192:01 = 1
Cargar configuración de ejeTodos los PNU
Descarga de bloques de datos OFFPNU 1192:01 = 0
El CMAX espera a la prueba de movimiento
1) Los datos de eje vuelven al estado de entrega al efectuar un reset de datos; los datos del equipo y de diagnosis no se borran.
Fig. A.2 Parametrización básica

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 167
Funciones de la puesta a punto (PNU 1192)El parámetro “Funciones de la puesta a punto” controla funciones importantes de la puesta a punto. La
escritura del parámetro activa acciones complejas en el CMAX que son absolutamente necesarias para
la puesta a punto.
� Sección C.2.16.
La función “Reset de datos” (PNU 1192:03) permite restablecer la configuración del eje
en cualquier momento. Los datos de eje y de identificación se borran. Por lo tanto, a
continuación es necesario repetir siempre la puesta a punto y la identificación.
A.2.2 Instrucciones paso a paso para la parametrización básica
Operaciones preliminares
1. Conectar el CMAX. El estado C00 se activa.
2. Activar el modo de funcionamiento de parametrización en CCON, esperar
la confirmación en SCON.
CCON.STOP y CCON.ENABLE no pueden estar activados.
B7 B6 B5 B4 B3 B2 B1 B0
CCON OPM2 OPM1 LOCK – RESET BRAKE STOP ENABLENominal 1 1 x 0 x x 0 0
SCON OPM2 OPM1 FCT 24VL FAULT WARN Ready ENABLEDNominal 1 1 0 x 0 0 0 0
3. Compruebe el estado (leer PNU 1192:02 -> nominal = 0).
4. Recomendación: Escribir nombre del equipo (PNU 121).
El valor predeterminado “CMAX1” puede utilizarse sin problemas, pero es
preferible utilizar un nombre inequívoco por si también es necesario
acceder al CMAX con el FCT.
5. Compruebe el número de versión del firmware (lea PNU 101).
Antes de la parametrización debe asegurarse de que el CMAX es
compatible con los datos de proyecto siguientes.
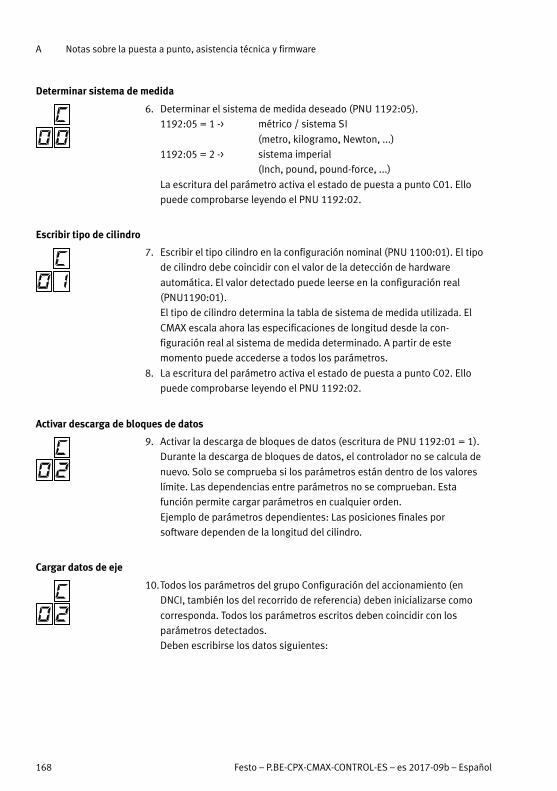
A Notas sobre la puesta a punto, asistencia técnica y firmware
168 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Determinar sistema de medida
6. Determinar el sistema de medida deseado (PNU 1192:05).
1192:05 = 1 -> métrico / sistema SI
(metro, kilogramo, Newton, ...)
1192:05 = 2 -> sistema imperial
(Inch, pound, pound-force, ...)
La escritura del parámetro activa el estado de puesta a punto C01. Ello
puede comprobarse leyendo el PNU 1192:02.
Escribir tipo de cilindro
7. Escribir el tipo cilindro en la configuración nominal (PNU 1100:01). El tipo
de cilindro debe coincidir con el valor de la detección de hardware
automática. El valor detectado puede leerse en la configuración real
(PNU1190:01).
El tipo de cilindro determina la tabla de sistema de medida utilizada. El
CMAX escala ahora las especificaciones de longitud desde la con
figuración real al sistema de medida determinado. A partir de este
momento puede accederse a todos los parámetros.
8. La escritura del parámetro activa el estado de puesta a punto C02. Ello
puede comprobarse leyendo el PNU 1192:02.
Activar descarga de bloques de datos
9. Activar la descarga de bloques de datos (escritura de PNU 1192:01 = 1).
Durante la descarga de bloques de datos, el controlador no se calcula de
nuevo. Solo se comprueba si los parámetros están dentro de los valores
límite. Las dependencias entre parámetros no se comprueban. Esta
función permite cargar parámetros en cualquier orden.
Ejemplo de parámetros dependientes: Las posiciones finales por
software dependen de la longitud del cilindro.
Cargar datos de eje
10.Todos los parámetros del grupo Configuración del accionamiento (en
DNCI, también los del recorrido de referencia) deben inicializarse como
corresponda. Todos los parámetros escritos deben coincidir con los
parámetros detectados.
Deben escribirse los datos siguientes:

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 169
Configuraciónnominal
Configuraciónreal
Parámetro
PNU 1100 PNU 1190:01 Cilindro
PNU 1101 PNU 1190:03 Diámetro de cilindro
PNU 1102 PNU 1190:05 Longitud del cilindro (longitud nominal)
PNU 1103 PNU 1190:04 Diámetro del vástago
PNU 1110 PNU 1190:10 Sistema de medición de recorrido
PNU 1111 PNU 1190:11 Longitud del sistema de medición de recorrido
PNU 1120 PNU 1190:20 Válvula
Es recomendable escribir los parámetros siguientes:
Datos deaplicación
Valorpredeterminado
Parámetro
PNU 1140 0° Posición de montaje
PNU 1141 6 bar Presión de alimentación
PNU 1142 5 kg Carga básica
Con DNCI/DDPC deberían escribirse adicionalmente:
Datos del eje Parámetro
PNU 1130 Offset del punto cero del eje
PNU 1131 Velocidad del recorrido de referencia
PNU 1132 Método del recorrido de referencia
Con DGCI debe escribirse:
Datos del eje Valor predeterminado
Parámetro
PNU 1104.01 0 (no existe) Opciones de DGCI: Unidad de bloqueo integrada
PNU 1104.02 0 (no existe) Opciones de DGCI: Carro adicional
PNU 1104.03 0 (no existe) Opciones de DGCI: Función de lubricación
PNU 1104.04 0 (no existe) Opciones de DGCI: Guía de rodamiento de bolas
protegida
PNU 1104.05 0 mm Opciones de DGCI: Distancia entre carro y carro
adicional KR
PNU 1104.06 0 mm Opciones de DGCI: Distancia entre carro y carro
adicional KL
El resto de los parámetros contiene valores predeterminados útiles. Estos pueden sobrescribirse,
aunque no es necesario. La tabla de frases no está inicializada.

A Notas sobre la puesta a punto, asistencia técnica y firmware
170 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Desactivar descarga de bloques de datos
11. Desactive la descarga de bloques de datos (escritura de PNU 1192:01 = 0).
Al desactivar la descarga de bloques de datos se parametriza por primera vez
el controlador. Si se han escrito todos los parámetros necesarios al escribir
los datos de eje, se sale del estado C02. A partir de este momento puede
leerse por primera vez la posición real o ejecutarse cualquier otra función
del CMAX.
Ahora el CMAX espera a que se ejecute la prueba de movimiento.
A.2.3 Parametrización sin hardware
Características– El CMAX puede parametrizarse por completo sin hardware � A.1.1. Para ello no es necesario
conectar un eje.
– Si no hay ningún eje conectado, el CMAX indica un error después de la parametrización. A pesar de
ello, es posible realizar la diagnosis y parametrizar el CMAX.
– Sin hardware pueden leerse todos los datos parametrizados. Para ello no es necesario conectar un
eje.
Longitud del cilindro
En DGCI está guardada la longitud de cilindro real (longitud del tubo del cilindro). El CMAX acepta las
longitudes útil y nominal en la comparación NOMINAL-ACTUAL.
El CMAX acepta una desviación de 5,00 mm entre la longitud planificada y la longitud memorizada en el
accionamiento sin emitir un error ni una advertencia.
A.2.4 C03: Prueba de movimientoDespués de parametrizar, es recomendable ejecutar una prueba de movimiento para comprobar el
sentido de regulación del accionamiento. Además, se comprueba si los tubos flexibles se han
conectado correctamente. Después de la parametrización, el CMAX espera que se ejecute la prueba de
movimiento y lo indica visualizando C03 en el display.
La prueba de movimiento debe realizarse obligatoriamente o ignorarse (no recomendado).
Información sobre cómo realizar la prueba de movimiento � Sección 3.2.1.
A.2.5 Recorrido de referencia e identificaciónDespués de realizar la prueba de movimiento con éxito, deben realizarse las funciones siguientes:
– Recorrido de referencia (solo con sistema de medición de recorrido incremental) � Sección 3.2.2
– Identificación � Sección 3.2.3
A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 171
A.3 Funcionamiento y asistencia técnica
A.3.1 Comparación entre valor real y nominal
El CMAX junto con la válvula, el cilindro y el sistema de medición conforma un sistema variable modular.
El controlador depende del tipo y tamaño de los componentes así como de sus características
individuales, que se determinan durante la identificación. A fin de evitar errores durante el
funcionamiento del CMAX, este ejecuta una detección automática del hardware conectado y una
comparación de la configuración nominal y real.
El CMAX distingue 3 configuraciones diferentes
Configuración nominalLa configuración nominal se compone de los valores parametrizados por el usuario para la
configuración del accionamiento.
Configuración real (PNU 1190)La configuración real se compone de los valores determinados en la detección automática de hardware
para los componentes de hardware.
Configuración de inicio (PNU 1195)La configuración de inicio contiene datos de configuración importantes del momento de la última
identificación. La configuración nominal actual solo puede modificarse después de la identificación
dentro de límites determinados, que se definen mediante la configuración de inicio.
En las siguiente situaciones tiene lugar una comparación de la configuración nominal y la configuración
real.
– tras la puesta en marcha
– después de adaptar ciertos parámetros, especialmente de la configuración
– después de un reinicio del eje en caso de acuse de recibo de error
¿Por qué se ejecuta la comparación?
1. La comparación debe garantizar que se ha conectado el eje correcto. En un terminal CPX se pueden
hacer funcionar hasta 8 CMAX. Los ejes conectados tienen que estar asignados inequívocamente al
CMAX correspondiente.
2. El controlador debe conocer el tipo y tamaño del accionamiento para poder funcionar correctamen
te. Las especificaciones incorrectas, p. ej. del diámetro, ocasionarían una regulación inestable.
3. Para determinar ciertos valores característicos del sistema de los ejes, en la puesta a punto debe
ejecutarse una identificación para cada eje. Cuando se cambian componentes es necesario repetir
la identificación.
Durante la comparación nominal-real el CMAX comprueba si la configuración nominal coincide con la
configuración real (} Error E01) y si se han cambiado componentes (} Advertencia W08 o error E01)

A Notas sobre la puesta a punto, asistencia técnica y firmware
172 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Comparación de tipo y tamañoSe comprueban el tipo y tamaño del accionamiento. Estos deben coincidir dentro de una tolerancia,
para que el controlador se pueda parametrizar correctamente.
Parámetro PNU de laconfiguración nominal
PNU de laconfiguración real
Tolerancia
Cilindro 1100 1190.1 –
Longitud del cilindro1) 1101 1190.2 o 1195.5 5 mm
Diámetro del cilindro 1102 1190.3 –
Sistema de medición de
recorrido
1110 1190.10 –
Longitud del sistema de
medición de recorrido
1111 1190.11 5 mm
Válvula 1120 1190.20 –
1) Solo con DGCI/DDLI: comparación con la longitud nominal de cilindro (PNU 1195.5) y la longitud de tubo de cilindro (1195.2). El
valor nominal tiene que coincidir con uno de ambos valores.
Tab. A.2 Configuración nominal/real y tolerancias
En caso de una desviación no permitida se genera el error E01. En este caso la configuración nominal se
tiene que adaptar a la configuración real para poder continuar trabajando. La configuración nominal
solo se puede modificar después de haber borrado los datos actuales de identificación. El CMAX no
acepta automáticamente la configuración y tampoco borra los datos de identificación
automáticamente.
Después de adaptar la configuración nominal deben ejecutarse de nuevo la prueba de movimiento y la
identificación.
ImportanteEl CMAX solo comprueba los parámetros que se leen desde los componentes durante la
detección automática del hardware. Por ejemplo, el CMAX no detecta si se ha cambiado
un cilindro DNCI. En este caso, no obstante, el usuario tiene que ejecutar la prueba de
movimiento y la identificación.
Comparación de números de serie
Si se ha cambiado la válvula, el cilindro o la interfaz de sensores por un componente del mismo tipo y
tamaño, esto se establece mediante una modificación de los números de serie. Si se ha cambiado un
componente, se notifica W08. Tiene que efectuarse una prueba de movimiento e identificarse de
nuevo. Si la prueba de movimiento la realiza el usuario, el nuevo número de serie se transfiere a la
configuración nominal.
Si el usuario ha sustituido tanto la válvula como el cilindro / interfaz de sensores, existe la posibilidad
de que al utilizar varios CMAX haya conectado incorrectamente el ramal de eje. En este caso se genera
E01.

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 173
A.3.2 Puesta a punto a través del control después de sustituir componentesEjemplo: En un sistema CMAX puesto a punto se sustituye la válvula proporcional VPWP-6 por una
nueva válvula proporcional VPWP-6. No debe utilizarse el FCT, por ello la prueba de movimiento y la
identificación deben ejecutarse a través del control.
Sustituir la válvula1. Desconectar la alimentación de 24 V y el aire comprimido.
2. Cambiar la VPWP-6 y realizar todas las conexiones eléctricas y neumáticas.
3. Conectar la alimentación de 24 V y el aire comprimido conforme a � A.1.2.
En la pantalla del CMAX se visualiza “C03” y la advertencia “W8 – Se ha cambiado el cilindro, la válvula,
el sistema de medición de recorrido o la conexión de sensores”.
Ejecutar prueba de movimiento:1. Activar el modo Puesta a punto:
CCON.OPM2 (Bit 7) = 1, poner todas las demás señales en 0
2. Byte 3 (función) = activar 2.
3. Funcionamiento (CCON.STOP = 1) y accionamiento habilitados (CCON.ENABLE = 1).
4. Con Inicio (CPOS.START = 1) se inicia la prueba de movimiento.
En la pantalla del CMAX se visualiza “8” (prueba de movimiento activa) y el progreso en %.
5. Si la prueba de movimiento se ha realizado con éxito, se comunica mediante Motion Complete
(SPOS B2 MC = 1) y la indicación “400” en la pantalla del CMAX.
Ejecutar identificación (recomendado):El modo Puesta a punto aún está activo.
1. Byte 3 (función) = activar 1.
2. Con Inicio (CPOS.START = 1) se inicia la identificación.
En la pantalla del CMAX se visualiza “7” (identificación activa) y el progreso en %.
3. Si la identificación se ha realizado con éxito, se comunica mediante Motion Complete
(SPOS.MC = 1) y la indicación “400” en la pantalla del CMAX.
Finalizar puesta a puntoPara conmutar al modo operativo utilizado en el funcionamiento de fabricación (modo de frase/modo
directo):
1. Activar parada (CCON.STOP = 0).
2. Cambiar el modo operativo, z. B. CCON.OPM1 = 0 y CCON.OPM2 = 0 (modo de frase).
3. Volver a habilitar el funcionamiento con CCON.STOP = 1. El controlador CMAX vuelve a estar listo
para el funcionamiento de fabricación.
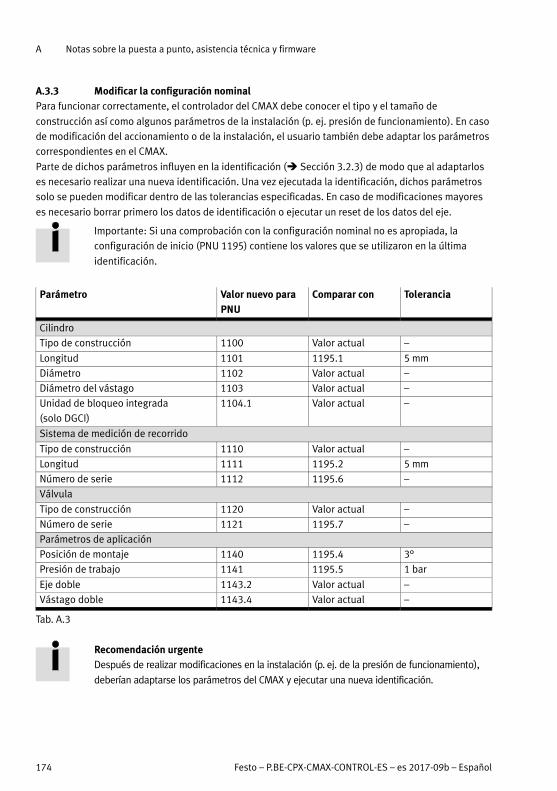
A Notas sobre la puesta a punto, asistencia técnica y firmware
174 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
A.3.3 Modificar la configuración nominalPara funcionar correctamente, el controlador del CMAX debe conocer el tipo y el tamaño de
construcción así como algunos parámetros de la instalación (p. ej. presión de funcionamiento). En caso
de modificación del accionamiento o de la instalación, el usuario también debe adaptar los parámetros
correspondientes en el CMAX.
Parte de dichos parámetros influyen en la identificación (� Sección 3.2.3) de modo que al adaptarlos
es necesario realizar una nueva identificación. Una vez ejecutada la identificación, dichos parámetros
solo se pueden modificar dentro de las tolerancias especificadas. En caso de modificaciones mayores
es necesario borrar primero los datos de identificación o ejecutar un reset de los datos del eje.
Importante: Si una comprobación con la configuración nominal no es apropiada, la
configuración de inicio (PNU 1195) contiene los valores que se utilizaron en la última
identificación.
Parámetro Valor nuevo paraPNU
Comparar con Tolerancia
Cilindro
Tipo de construcción 1100 Valor actual –
Longitud 1101 1195.1 5 mm
Diámetro 1102 Valor actual –
Diámetro del vástago 1103 Valor actual –
Unidad de bloqueo integrada
(solo DGCI)
1104.1 Valor actual –
Sistema de medición de recorrido
Tipo de construcción 1110 Valor actual –
Longitud 1111 1195.2 5 mm
Número de serie 1112 1195.6 –
Válvula
Tipo de construcción 1120 Valor actual –
Número de serie 1121 1195.7 –
Parámetros de aplicación
Posición de montaje 1140 1195.4 3°
Presión de trabajo 1141 1195.5 1 bar
Eje doble 1143.2 Valor actual –
Vástago doble 1143.4 Valor actual –
Tab. A.3
Recomendación urgenteDespués de realizar modificaciones en la instalación (p. ej. de la presión de funcionamiento),
deberían adaptarse los parámetros del CMAX y ejecutar una nueva identificación.

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 175
A.3.4 Reset de datosUn reset de datos se utiliza para restablecer al estado de fábrica todos los parámetros del CMAX o
parte de ellos. Esto resulta conveniente siempre que se hayan modificado piezas del accionamiento o
de la instalación y sea necesario adaptar la configuración. Dependiendo de la magnitud de la
modificación son apropiados diferentes resets � Tab. A.4:
Reset Descripción
Datos de
identificación
Un reset de datos de identificación es conveniente cuando solo se tienen que
ejecutar pocas modificaciones pero es necesario borrar los datos de
identificación (� 3.2.3). Después de adaptar la configuración debe realizarse de
nuevo la identificación.
– Se restablecen los datos de identificación y de adaptación.
– El resto de los datos no se borra.
El reset de los datos se activa escribiendo el parámetro de puesta a punto
“Reset de datos” PNU 1192:03 = 2.
Datos del eje Cuando es necesario restablecer numerosas partes de la configuración nominal,
p. ej. porque el CMAX se tiene que utilizar con otro eje, es conveniente realizar
un reset de datos del eje. También es conveniente ejecutar un reset de datos del
eje antes de una puesta a punto a través de una unidad de control de nivel
superior, para obtener un estado de salida definido.
– Se restablece el sistema de medida.
– Todos los parámetros de usuario (configuración del accionamiento, tabla de
frases, datos de proyecto, etc.) de un eje se restablecen al estado de en
trega.
– Los datos de identificación, de adaptación y de mantenimiento de un eje se
restablecen.
– La memoria de diagnosis no se borra y registra la entrada “Reset de datos”.
– Los datos del equipo, como el nombre y el tiempo de funcionamiento, se
mantienen.
– La palabra clave no se borra.
– El CMAX cambia al modo de configuración C00
El reset de los datos se activa escribiendo el parámetro de puesta a punto
“Reset de datos” PNU 1192:3 = 3.Datos del equipo El CMAX se restablece completamente al estado de entrega
– Se borran los mismos parámetros que en el reset de los datos del eje.
– Además se borran la palabra clave predeterminada en el equipo y la memoria
de datos
Esta función únicamente está disponible en la interfaz de diagnosis y solo puede
ser activada por el FCT. Después del reset no es posible comunicar con el CMAX.
En el display se visualizan 3 guiones intermitente “---”. Es necesario desconectar
y volver a conectar el terminal CPX.
Nota: El plugin FCT a partir de la V2.2 ejecuta automáticamente un reinicio del
terminal CPX.

A Notas sobre la puesta a punto, asistencia técnica y firmware
176 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Reset Descripción
Prueba de
movimiento
La prueba de movimiento tiene que restablecerse antes de poder volver a
ejecutarse. Este reset es necesario cuando se ha cambiado un componente sin
que el CMAX lo haya podido detectar en base al número de serie (ejemplo: Se ha
sustituido el cilindro DNCI).
La prueba de movimiento se repone al escribir PNU 1192:07 = 1.
Tab. A.4 Tipos de reset de datos
Por lo general, por reset de datos se entiende un restablecimiento de datos de eje.
A.3.5 Actualización del firmwareEl firmware del CMAX puede actualizarse mediante el plugin FCT CMAX a través de la interfaz de
servicio o de red del nodo de bus.
Si al conectar no hay firmware válido cargado en el módulo, se emite el error E74 “No hay firmware”.
Poner la instalación en un estado seguro antes de descargar el firmware. Restablecer todos los datos
de salida del control para el CMAX, es decir, poner los bytes 1 … 8 en 0. El control no debe bloquear el
acceso para el FCT.
Recomendación: El control debería conmutarse al estado de parada. Si es posible, separar físicamente
la conexión del bus con el terminal CPX, p. ej. extraer el cable de bus del terminal CPX.
Procedimiento para la actualización del firmware � Sección A.8.
A.3.6 Comportamiento al arranque y Power downSi se detecta una avería de la tensión de funcionamiento, todos los datos del usuario (parámetros del
equipo y del eje, datos de identificación y de adaptación) se guardan de manera remanente. Después
de la conexión se comprueba si los datos del CMAX se han guardado sin errores durante la última
desconexión. En caso de error, se emite E76.
Si el CMAX indica E76, en el controlador se encuentran los últimos datos guardados correctamente. Los
parámetros como lista de frases, configuración de eje, etc. pueden haber sido modificados entretanto
por el usuario. Estas modificaciones se han perdido. Los datos de adaptación e identificación
posiblemente no son válidos y no deben utilizarse.
� Comprobar si los datos de usuario están completos y son correctos.

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 177
A.3.7 Optimización del retardo de respuesta en caso de error E50La monitorización de presión se puede parametrizar con el parámetro “Retardo de respuesta E50”
(PNU 1144). La parametrización también es válida cuando E50 se ha parametrizado como W50. La
supervisión de respuesta E50 define dos tiempos de supervisión para la presión de alimentación: El
tiempo para la primera subida de presión de 100 mbar y el tiempo máximo para alcanzar la presión
mínima.
Para la monitorización de la presión de alimentación, el CMAX utiliza los sensores de presión del VPWP.
Estos miden las presiones en la tomas 2 y 4 de la válvula. A partir de dichas presiones, en el modo de
funcionamiento normal se puede averiguar si hay presión de alimentación (toma 1).
Tras un largo tiempo de parada o tras evacuar el cilindro mediante un circuito adicional puede seguir el
siguiente efecto:
– Después de la conexión el VPWP está primero en la posición central, es decir, la válvula está
bloqueada.
– La presión en las tomas 2 y 4 se establece primero a través de la fuga de la válvula y por lo tanto
lentamente.
Para que en este caso no se indique el error E50 al activar CCON.ENABLE, después de la habilitación el
CMAX primero supervisa la subida de presión y la obtención de la presión mínima.
El comportamiento en caso de habilitación es por tanto el siguiente:
1. Antes de activar CCON.ENABLE no se indica ningún error ni advertencia. Un mensaje pendiente
puede confirmarse.
2. Cuando se activa CCON.ENABLE=1 y las presiones de cámara son demasiado bajas, dentro del tiem
po de subida de presión debe detectarse una subida de presión de 100 mbar (1,5 psi). Si no hay
una subida de presión suficientemente grande, se indica el error o advertencia.
3. Cuando se detecta una subida de presión se ejecuta la habilitación del controlador y se activa
SCON.ENABLED incluso aunque todavía no exista la presión mínima definida. Después debe alcan
zarse la presión mínima dentro del tiempo máximo al menos en una de las cámaras del cilindro.
Hasta que haya transcurrido dicho tiempo no se indica ningún error E50.
Si no se indica ningún error, después del paso 2 se puede iniciar una orden de posicionamiento. Si en
caso de un inicio dentro de este tiempo de supervisión no hay presión de alimentación suficiente puede
producirse el error E30/E31.
La parametrización es estándar en la mayoría de casos para evitar errores E50 “falsos”. En caso de
accionamientos muy grandes puede ser conveniente una adaptación. El parámetro se puede adaptar
en el FCT en la página “Datos I/O ...”.

A Notas sobre la puesta a punto, asistencia técnica y firmware
178 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
A.3.8 Notas a E76El error E76 significa que el CMAX ha efectuado un reinicio (Reset) indeseado. La causa de dicho reini
cio pueden ser interferencias electromagnéticas intensas.
Al contrario que en caso de desconexión o de un reinicio deseado, con un reinicio indeseado no pueden
guardarse los datos de usuario. Se pierde cualquier modificación de los parámetros entre la última
conexión y la aparición del error.
Por esa razón, el operario de la instalación debe asegurarse de que los datos del CMAX son correctos.
Cuando no pueda descartarse que se hayan modificado parámetros desde la última conexión, debe
efectuarse una comparación p. ej. con un software de dimensionado para comprobar los parámetros y
corregirlos si es necesario.
Medidas en caso de aparición de E76:
� Comprobar los valores de parámetros guardados en el CMAX y corregirlos, p. ej. mediante compara
ción con el proyecto de software de dimensionado.
� Comprobar si pueden producirse interferencias electromagnéticas en el CMAX. Esto también afecta
al sistema de medición de recorrido y a la válvula.
� Garantizar una correcta puesta a tierra � Descripción del sistema CMAX.

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 179
A.4 Diagramas de flujo para la programación
La secciones siguientes contienen diagramas de flujo para el control del CMAX a través de las I/O en
aplicaciones típicas.
A.4.1 Creación de la disponibilidad para funcionar
Requisitos– Las tensiones de funcionamiento y de la carga para válvulas están desconectadas.
– El master del bus de campo está preparado para establecer la comunicación en el momento en que
se conecta el terminal CPX. Si no es así, debe reservarse un tiempo de espera adicional después de
establecer la comunicación para modificar el orden de los bytes.
Importante– Todos los bits de habilitación (CCON.ENABLE, CCON.STOP, CCON.BRAKE) se pueden activar desde el
principio y simultáneamente. En consecuencia, los acuses de recibo pueden evaluarse al mismo
tiempo.
– Al cambiar componentes, en muchos casos se repone automáticamente la prueba de movimiento.
Por esta razón, el estado de la prueba de movimiento debería comprobarse después de la conexión
y, si es necesario, ejecutarse de nuevo de manera automática o inducida por el usuario.
– El ajuste del modo de funcionamiento debería realizarse en una posición centralizada en el control
en un módulo propio (� Apéndice A.4.4).
– Si el CMAX indica un error, dependiendo del mismo es posible que no ya se puedan indicar todas las
señales de estado esperadas. En ese caso, debería interrumpirse la evaluación, p. ej., de
SCON.ENABLED o SCON.OPEN.

A Notas sobre la puesta a punto, asistencia técnica y firmware
180 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Tensión de funcionamiento = 0 VTensión de funcionamiento(válvula) = 0 V
CMAX desconectado
SPOS.MC = 0
SCON.24VL = 0
Los datos de salida deben inicializarse siempre alprincipio con 0 para impedir que las señales demando de la última fase de funcionamiento afectenal CMAX
Error:el CMAX no responde
Restablecer los datosde salida del control
Aplicar tensión defuncionamiento
Iniciar temporizador:3 segundos
El CMAX inicializa el ramal y el controlador y consultael ajuste para el formato de datos en el nodo de bus.
Monitorización para detectar un módulo defectuoso.El tiempo puede variar en función del nodo CPXC.
[m]
[m]
[m]
[m]
[o]
[o]
Fin tiempotemporizador
Tempor. aún en marcha
SCON.FAULT = 0
SCON.FAULT = 1
SPOS.MC = 1
Comprobar estadopuesta a punto
Cancelartratamiento de errores
Conectar presión
Ajustar modofuncionam.
Conectar tensión defuncionamiento válvula (= 24 V)
SCON.FAULT = 0
SCON.FAULT = 1
SCON.24VL = 1
Página2
Cancelartratamiento de errores
[m]
[m]
[m]
[m]
[m]
[o]
Dependiendo del retardo de respuesta E50 ajustado, la comprobación de lapresión de funcionamiento necesita hasta 30 segundos para comunicarENABLED o FAULT. � Descripción de E50.
Esta operación debe ejecutarseobligatoriamente
Esta operación es unarecomendación y no es obligatorioejecutarla
[m]
[o]

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 181
Desbloquear unidad de bloqueo, si existe
SCON.ENABLED = 0
[m]
SCON.FAULT = 0
SCON.FAULT = 1
Cancelartratamiento de errores
Página1
CCON.ENABLE = 1
CCON.BRAKE = 1
Cancelartratamiento de errores
CCON.STOP = 1
Listo
SCON.READY = 0
SCON.FAULT = 0
SCON.FAULT = 1
SCON.ENABLED = 1
SCON.READY = 1
[m]
[m]
[m]
[m]
[m]
[m]
Para que el handshake funcione es necesario desactivar losdistintos bits de control (CPOS.xxx = 0).Recomendación: Poner byte CPOS = 0
CPOS = 0[m]
Fig. A.3 Diagrama de flujo para crear disponibilidad para funcionar

A Notas sobre la puesta a punto, asistencia técnica y firmware
182 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
A.4.2 Iniciar frase
SCON.ENABLED = 1SCON.READY = 1
[m]
SCON.ACK = 1
Tiempo de espera1 ciclo de bus
CPOS.START = 1
CPOS.START = 0
Frase ejecutada
SCON.ACK = 0
[m]
[m]
[m]
[m]
[m]
Funcionamiento habilitado
CPOS.START = 0
Datos salida byte 3= n.º frase nominal
[o]
SCON.ACK = 1
SCON.ACK = 0
SCON.ACK = 0
SCON.ACK = 1
SPOS.MC = 0
SPOS.MC = 1
Preparar flanco de inicio
Flanco de inicio
En todos los buses de campo que no soportan una transmisión de datos consistente debeesperarse un ciclo de bus tras introducir el número de registro. En dicho ciclo se transmite elnúmero de registro del bus de campo al CMAX.Recomendación: En la mayoría de los controles, el ciclo del control es más largo que el del bus –> Tiempo de espera = 1 ciclo de control
Reponga el inicio para reducir el tiempo de espera lapróxima vez.
En MC solo hay que esperar cuando es necesarioalcanzar la posición de destino para seguir el ciclo.
[m]
[o]
Esta operación debe ejecutarseobligatoriamente
Esta operación es unarecomendación y no es obligatorioejecutarla
[m]
[o]
Fig. A.4 Diagrama de flujo para iniciar registro

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 183
A.4.3 Confirmación de errores
Error activo
SPOS.MC = 1
[m]
Esta operación debe ejecutarseobligatoriamente
Esta operación es unarecomendación y no es obligatorioejecutarla
[m]
[o]
SPOS.MC = 0
SCON.FAULT = 0
SCON.FAULT = 1
Contador deresets = 3
Fin tiempotemporizador
Contador resets < 3
Tempor. enmarcha
Contador de resets = 1[m]
[m]
[m]
[m]
[m]
[m]
[m]
Flanco ascendente enCCON.RESET
Iniciar temporizador:3 segundos
Incrementar contador resets en 1
Reset no posible
Esperar a que finalice la reacción al error.(atención: No en el modo Parametrización)Un reset se ignora antes.
Es necesaria una diagnosis ampliada, p. ej., con FCT.
Utilizar el contador de resets (de números enteros) para limitar el número máximo de resets. El CMAX intenta siempre desactivar todos los errores activos, no es necesario confirmar los erroresen varias veces. En todo caso, puede que se produzcan errores después de la confirmación. Si serealizan más de 3 intentos, interrumpir la confirmación y ejecutar una diagnosis ampliada, p. ej.,con el FCT.
Un flanco ascendente significa que CCON.RESET permanece activado como mínimo el tiempo quetarde en detectarlo el CMAX. Este periodo de tiempo depende del nodo de bus utilizado y deltiempo del ciclo de bus. Recomendación: Tiempo > 10 ms
Utilizar el temporizador para limitar el tiempo máximo de respuesta del CMAX. En función delnúmero de error, el reset causa diferentes reacciones en el CMAX. La operación más larga es elreinicio del ramal (máx. 3 segundos).
Reset correcto[o]CCON.RESET = 0
Para que el handshake funcione es necesario desactivar losdistintos bits de control (CPOS.xxx = 0).Recomendación: Poner byte CPOS = 0
CPOS = 0[m]
Fig. A.5 Diagrama de flujo para confirmar errores

A Notas sobre la puesta a punto, asistencia técnica y firmware
184 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
A.4.4 Cambio del modo de funcionamiento
CCON.OPM1 <> SCON.OPM1
O BIEN
CCON.OPM2 <> SCON.OPM2
Al conmutar entre el modo de frase y el modo directo no se requiere “Bloquearfuncionamiento”. Esto puede aprovecharse en una optimización de la función decontrol.
[m]SCON.READY = 1
[m]
SCON.READY = 0
Modo funcionam. anterioractivo
Modo funcionam. nuevoactivo
CCON.STOP = 0
[m]
[m]
[m]
[o]
[o]
Datos salidaBytes 2 ... 8 = 0
Ajustar nuevo modofuncionam.
CCON.STOP = 1
CCON.OPM1 = SCON.OPM1YCCON.OPM2 = SCON.OPM2
Si es necesario: Volver a habilitar elfuncionamiento
SCON.READY = 1
SCON.READY = 0
CCONBit B6 = CCON.OPM1Bit B7 = CCON.OPM2
SCONBit B6 = SCON.OPM1Bit B7 = SCON.OPM2
B7 B6 Modo de funcionamiento0 0 Modo de frase
0 1 Modo directo
1 0 Puesta a punto1 1 Parametrización
Espere a recibir acuse de recibo del cambio. Durante la conmutación, los bytes de estado 2 ... 8 no pueden evaluarse porque no es posibleasignarlos con seguridad a un modo de funcionamiento.
Todos los bytes que dependen del modo de funcionamiento se ajustan a cero. Deesta manera se impide que los datos nominales anteriores afecten al CMAX,aunque tienen un significado completamente diferente en el modo defuncionamiento nuevo.
Presuposición: CCNON. ENABLE = 1 y CCON.STOP = 1
Esta operación debe ejecutarseobligatoriamente
Esta operación es unarecomendación y no es obligatorioejecutarla
[m]
[o]
Fig. A.6 Diagrama de flujo para conmutar el modo de funcionamiento

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 185
A.5 Versiones de firmware
A.5.1 Versión de firmware 2.3
La versión de firmware 2.3 requiere como mínimo la versión 2.3 del plugin.
La siguiente tabla muestra las características nuevas y mejoradas más importantes de la versión de
firmware 2.3, incluido el plugin 2.3.
Cantidad de frases de la selección de frases
A partir de la versión de firmware 2.3 son compatibles 128 (hasta entonces 64).
Unidad de bloqueo interna DGCI con permiso de escritura sin unidad de bloqueo configuradaEn la DGCI con unidad de bloqueo integrada 1H-PN: Esta opción puede activarse junto con la opción
PNU 1143:03 “Unidad de bloqueo utilizada”, pero también sola. Si se activa esta opción sola, el control
de la sujeción se realiza externamente mediante el PLC.
Para el controlador, el CMAX añade a la longitud del cilindro la longitud de carrera dependiente del
diámetro.
Bit de vidaCon el bit de vida SPOS.LIFE (SPOS bit 0) una unidad de control de nivel superior puede comprobar la
accesibilidad y funcionamiento del CMAX � Sección 3.1.11.
Valor efectivo permite la indicación de advertenciasTambién pueden notificarse advertencias en el el valor efectivo secundario.
Configuración valor efectivo secundario
En la configuración del valor efectivo secundario PNU 523:04/08 = 2 (antes “Fuerza efectiva (bytes
5+6) / Posición efectiva (bytes 7+8)”) no se han fijado la fuerza efectiva y la posición efectiva en las
posiciones de bytes descritas, sino que sus posiciones en los datos de estado dependían del paráme
tro “Formato análogo de datos de proceso” de los ajustes de sistema CPX. A partir de FW 2.3 existe el
ajuste PNU 523:04/08 = 3, “Posición efectiva (bytes 5+6) / fuerza efectiva (bytes 7+8)”, en el que la
posición de los valores efectivos es independiente del parámetro “Formato análogo de datos de pro
ceso”. De esta forma hay siempre datos I/O inequívocos independientemente del modo de regulación
� PNU 523 y sección 2.2.7.
La configuración anterior se mantiene como “Posición efectiva / Fuerza efectiva (compatible con
V2.2)”. Se recomienda no utilizar más esta variante.

A Notas sobre la puesta a punto, asistencia técnica y firmware
186 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Configuración valor nominal principalCon PNU 523:02/06 = 1 puede ajustarse en el valor nominal principal la posición nominal y la fuerza
nominal en posiciones de byte fijas.
Solo se utiliza el valor nominal previsto para el modo de regulación.
Reinicio inesperado: es posible que se pierdan datos (error E76)
El número de error E76 (reinicio inesperado: es posible que se pierdan datos) puede registrarse a partir
de V2.3 sin reinicio de datos. El operario de la instalación debe asegurarse de que los datos del CMAX
son correctos � A.3.8.
Plugin: establecimiento de la versión de firmware en el proyecto de software de dimensionadoCuando se selecciona una versión de firmware en la página “Controller” (PNU 109) se garantiza p. ej.
para varios equipos iguales u otros que siempre se utilice un firmware determinado. Esto produce lo
siguiente:
– este firmware se importa al proyecto,
– al activar el mando del equipo (p. ej. antes de una descarga del proyecto), si es necesario se realiza
una descarga de firmware.
A.5.2 Versión de firmware 2.2La versión de firmware 2.2 requiere como mínimo la versión 2.2 del plugin.
La siguiente relación muestra las características nuevas y mejoradas más importantes de la versión de
firmware 2.2, incluido el plugin 2.2.
Datos I/O– La posición real y la fuerza real ahora se pueden transmitir simultáneamente a los datos de entrada
del control. Esto permite crear diagramas de fuerza-recorrido en tiempo real en el control o poner
en práctica funciones de supervisión de fuerza-recorrido. La parametrización correspondiente se
realiza en el plugin FCT en la página “Diagnosis/Datos I/O”, en el registro “Datos I/O”.
– Para una diagnosis rápida y sencilla es posible transmitir el número de error a los datos de entrada
(como valor efectivo secundario en el byte 4). Por lo tanto, en caso de error ya no es necesaria una
tarea adicional de parametrización. Esta función se parametriza en el plugin FCT en la página
“Diagnosis/Datos I/O”, en el registro “Datos I/O”.
– Si el control activa el bit de control CCON.LOCK, el plugin FCT ya solo tiene acceso de lectura al
CMAX. Hasta ahora todavía podían ejecutarse determinadas funciones de optimización (p. ej.
adaptación de parámetros del controlador). De este modo, los conceptos de seguridad del
explotador de la instalación puestos en práctica en el control son compatibles.
– El bit de estado RSB.RCE ahora también se activa en E27.
– Se han mejorado las denominaciones de algunos bits I/O.

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 187
Plugin 1.8 o anterior Plugin 2.2
SCON.OPEN SCON.READY
SCON.FCT_MMI SCON.FCT
CDIR.ABSCDIR.ABS CDIR.REL
SDIR.ABS SDIR.REL
RCB1.ABS RCB1.REL
Tab. A.5 Nuevas denominaciones mejoradas de bits de control y de estado
Monitorización de la presión de alimentación (error E50)El número de error E50 (presión de alimentación demasiado baja) está parametrizada de fábrica como
advertencia a partir de la V2.2. Con este ajuste, una presión demasiado baja en las cámaras del cilindro
no causa una interrupción del proceso ni un cambio al estado de error. A pesar del mensaje de
advertencia puede iniciarse una orden de posicionamiento.
Esto resulta especialmente ventajoso en cilindros de gran volumen porque no es necesario respetar un
largo tiempo de espera después de conectar la presión de funcionamiento. Si por algún motivo todavía
no hubiera presión de funcionamiento, después de iniciar una frase de posicionamiento, los números
de fallo E30, E31 o E56 indican que no se ha realizado el movimiento esperado y señalizan al usuario un
estado de error del accionamiento.
Si una presión de alimentación demasiado baja se debe continuar indicando como error, es necesario
parametrizar correspondientemente E50 en el plugin en la página “Diagnosis/Datos I/O”, en el registro
“Reacción ante mensajes”.
Además se ha mejorado el retardo de respuesta del mensaje E50. El retardo de respuesta se puede
adaptar si es necesario. Página del plugin “Diagnosis/Datos I/O”, registro “Configurar mensajes”.
Detalles � A.3.7.
Regulación de fuerzaOptimización y aumento de la robustez del controlador de fuerza frente las influencias perturbadoras
de la aplicación. Por ejemplo:
– Se evitan movimientos de retorno inesperados del accionamiento en relación con el sentido de la
fuerza.
– Se evitan movimientos involuntarios en caso de fuerzas rápidas perturbadoras en el sentido de la
fuerza durante la regulación de la fuerza a aplicar.
– Conmutación a la regulación de fuerza mejorada cuando el eje todavía no se ha detenido tras una
orden de posicionamiento.
Compatibilidad con las características de DGCILas características de DGCI carro adicional, unidad de bloqueo y opciones de lubricación repercuten en
la carrera útil y la longitud del cilindro. Estas características se tienen en cuenta durante la
configuración. Información detallada � B.2.5.
Textos de errorLos textos de mensaje de los números de error están guardados en el CMAX y se pueden leer mediante
un bus de campo para representarlos en una unidad de indicación o de control. Los textos están
disponibles en alemán y en inglés. Ventaja: Los textos de mensaje no tienen que gestionar en el control,

A Notas sobre la puesta a punto, asistencia técnica y firmware
188 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
sino que serán actuales en cada futura versión de firmware. El idioma se parametriza en el plugin en la
página “Controlador”.
Identificación de valores característicos
Al final de la identificación se definen valores característicos para aceleraciones y deceleraciones
alcanzables. Hasta ahora, los valores máximos se determinaban aquí ejecutando dos carreras del 80 %
de la carrera útil en el perfil automático. No obstante, los valores realmente alcanzables dependen en
gran medida de la posición de inicio y la posición de destino. Para determinar resultados realísticos, a
partir de la V2.2 se determinan valores medios de aceleración y deceleración. A tal fin se utilizan
carreras cortas en el perfil libre. Véase � 3.1.1 y � 3.2.3.
Otras mejoras del firmware
– Ahora es posible configurar la masa de la pieza utilizada para el recorrido de referencia. Página del
plugin “Recorrido de referencia” -> Carga útil (PNU 1134).
– La rampa de fuerza se puede parametrizar hasta 100.000 N/s. Los cilindros grandes pero de carrera
corta pueden alcanzar una rampa de fuerza superior a 10.000 N/s.
– La regulación de reposo se puede desconectar.
– Al desactivar CPOS.JOGP/CPOS.JOGN, la operación por actuación secuencial termina con la
deceleración configurada y no con la deceleración de parada.
– Se han ampliado las causas del error E58 y por ello se ha formulado de forma más general como
“error de handshake”. La causa concreta de E58 se puede determinar en el registro online
“Diagnosis”, registro “Mensajes activos” o mediante la lectura de la memoria de diagnosis.
– En la función de diagnosis “Registrar datos de medición” están disponibles más señales digitales.
– El acuse de recibo de error de seguimiento (bit de estado SPOS.DEV) se ha optimizado en algunas
situaciones especiales.
Mejoras del plugin
Los puntos siguientes son compatibles con el plugin independientemente de la versión de firmware
utilizada.
– Comunicación rápida del plugin FCT a través de la interfaz de Ethernet del nodo de bus utilizado.
Función de búsqueda de la dirección IP ajustada en la red conectada. Si el usuario dispone en su
red de un acceso seguro a Internet, es posible una diagnosis a distancia a través de Internet.
– Si los límites de carga recomendados para el accionamiento se exceden al configurar la carga
básica y la carga útil, el plugin emite la advertencia correspondiente.
– Conmutación entre textos cortos y largos en el registro online “Datos I/O”. Esto simplifica la
asignación de los términos utilizados.
Ejemplo CCON.Bit0: “Habilitar accionamiento” o “ENABLE”.
– En algunas situaciones (p. ej. después de un reset de datos del equipo errores E72, E73, E74) es
necesario un reinicio de todo el terminal CPX. La nueva función de reset “Reiniciar terminal CPX”
permite el reinicio sin desconectar la tensión de alimentación. (Menú [Componente] [Reiniciar
terminal CPX] ).
– En el asistente de la comparación de hardware, con el botón “Actualización de proyecto” de la
segunda página se puede cargar el proyecto CMAX en el proyecto FCT sin tener que ejecutar el
asistente completo.

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 189
– A los datos de medición se les puede asignar un texto descriptivo. Esto permite documentar el
comportamiento de modo rápido y sencillo.
– Facilidad de manejo mejorada al utilizar el sistema de medición de recorrido MME-MTS y el
accionamiento DGPI. Ahora el plugin tiene en cuenta automáticamente el decalaje de 28 mm del
sistema de medición y ya no es necesario realizar una corrección adicional del decalaje del punto
cero del eje, de la longitud del cilindro y del sistema de medición. Información detallada � B.2.3.
A.5.3 Versión de firmware 1.9La versión de firmware 1.9 requiere como mínimo la versión 1.8.0 del plugin.
El error E55 se anula
Si se utilizan relés de seguridad electrónicos para conectar y desconectar la tensión de la carga,
mediante los autotests de los relés se puede activar el error E55 (bajón de la tensión de la carga: La
potencia de la unidad de alimentación no es suficiente).
Esto ocasiona un tratamiento de errores necesario pero no deseado en la unidad de control de nivel
superior.
En la versión de firmware 1.9 se anula el error E55.
A.5.4 Versión de firmware 1.8La versión de firmware 1.8 requiere como mínimo la versión 1.8.0 del plugin.
La información sobre las modificaciones más importantes figura a continuación:
Compatibilidad con más accionamientos y adaptaciones de longitudes de sistema de medición yvalores límite predefinidos
Los nuevos accionamientos DDPC y DDLI, así como el tamaño 63 del DSMI son compatibles.
Además se han adaptado longitudes de sistema de medición y valores límite predefinidos.
La siguientes características de la versión del firmware 1.1 se han mejorado en el firmware 1.8– Si se había modificado la carga útil en dos órdenes de fuerza consecutivas, la transición estaba
relacionada con un aumento de la actividad de la válvula.
– Si con la primera orden de posicionamiento después de la conexión se había activado el modo de
valor nominal continuo, esto podía provocar un movimiento incontrolado a la posición final.
– Si la orden de posicionamiento actual se había interrumpido a causa de una nueva orden, en raros
casos esto podía provocar un desplazamiento demasiado rápido a la posición de destino.
– Mejora de la función Trace, especialmente la resolución de señales de fuerza.
A.5.5 Versión de firmware 1.1La versión de firmware 1.1 requiere como mínimo la versión 1.1.0 del plugin.
La información sobre la compatibilidad y las modificaciones más importantes figura a continuación:
Nuevo mensaje de error E47El recorrido de referencia o la identificación solo deben iniciarse cuando Motion Complete está activado
(MC=1). De lo contrario se produce el error E47.

A Notas sobre la puesta a punto, asistencia técnica y firmware
190 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Mediante esta modificación el handshake entre la unidad de control de nivel superior y el CMAX es más
claro.
Mejora del handshake en el modo de funcionamiento Parametrización para datos I/O cíclicos
Si el control activa el modo de funcionamiento Parametrización, el CMAX ya no pone automáticamente
los datos I en 0. Mediante esta modificación el handshake entre el control y el CMAX es más claro.
Error de válvula en caso de bajón breve de la tensión de alimentación corregidoSi la unidad de alimentación era demasiado débil o su regulación posterior demasiado lenta, en
determinadas condiciones límite podía generarse un error de válvula (LED rojo) sin que el CMAX
comunicara un error. Las órdenes de posicionamiento no se ejecutaban.
Recorrido de referencia incorrectoEn caso de accionamientos muy grandes y/o cargas de masa elevadas en posición vertical los tiempos
de supervisión no bastaban. Se ha aumentado la robustez del proceso de referenciado.
Modificación de handshake START/ACK o HOME/ACK en caso de habilitación del funcionamiento (STOP)Las señales CPOS.START (Bit B1) y CPOS.HOM (Bit B2) todavía tienen que estar desactivadas en el bit
de estado SCON (= 0) al activar la habilitación de funcionamiento (CCON.ENABLE). De lo contrario se
produce el nuevo error E58 o la nueva advertencia W58 (configurable).
Los diagramas siguientes a) hasta c) muestran los distintos casos.
NotaLa secuencia conforme a a) también debe tenerse en cuenta después de un error. Antes
de confirmar el error es obligatorio activar CPOS.START = 0 y CPOS.HOM = 0.
a) Secuencia temporal sin errores de las señales de mando CCON.ENABLE, CPOS.STOP,
CPOS.START/HOM:
CCON.ENABLE
SCON.ENABLED
CCON.STOP
SCON.READY
CPOS.START/CPOS.HOM
SPOS.ACK
SCON.FAULT
Fig. A.7 Secuencia sin errores de señales de mando

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 191
b) Secuencia temporal incorrecta: CPOS.START o CPOS.HOM (Homing, iniciar recorrido de referencia)
ya está activado cuando se activa CCON.STOP:
CCON.STOP
SCON.READY
CPOS.START/CPOS.HOM
SPOS.ACK
SCON.FAULT
Fig. A.8 Secuencia incorrecta de señales de mano – Error
Esta situación genera el error E58. CPOS.START/CPOS.HOM ya está activado o todavía está activado.
Nota: Primero se debe desactivar CPOS.START/CPOS.HOM y después confirmar el error.
c) Secuencia temporal incorrecta, como (b) pero configurada como advertencia:
CCON.STOP
SCON.READY
CPOS.START/CPOS.HOM
SPOS.ACK
SCON.WARN
Fig. A.9 Secuencia sin errores de señales de mando – Advertencia
Esta situación genera la advertencia E58. Al retirar CPOS.START/HOM se desactiva SPOS.ACK y se
puede iniciar una orden de posicionamiento. La advertencia con el flanco de inicio se borra.
Nota: Después de un error siempre es necesario cerciorarse de que, antes de confirmarlo,
CPOS.START/HOM estén obligatoriamente desactivadas (= 0).
A.5.6 Versión de firmware 1.0La versión de firmware 1.0 es la primera versión autorizada y requiere como mínimo la versión 1.0.1 del
plugin. Esta versión está descrita íntegramente en las descripciones del CMAX con la versión 0908NH.

A Notas sobre la puesta a punto, asistencia técnica y firmware
192 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
A.6 Relación entre proyecto, CMAX y plugin
El CMAX contiene:
– Versión de firmware
– Versión necesaria del plugin
para el firmware existente
– Datos del proyecto
El proyecto del FCT contiene:
– Información sobre el firmware del CMAX en el
que se ha cargado el proyecto.
– Versión del plugin con la que se creó el
componente en el proyecto (al abrir el proyecto
se abre automáticamente la versión
correspondiente del plugin)
– Datos del proyecto
Versión de firmware 1.1
Plugin ≥ 1.1.0 necesario
Datos del proyecto............
1. Proyecto creado con plugin 1.8.0
Datos del proyecto......…
Versión de firmware 1.1
2.
Proyecto FCT
Fig. A.10 Relación entre proyecto, CMAX y plugin (ejemplo firmware 1.1 con plugin 1.8.0)
Para establecer el enlace de equipos se comprueba lo siguiente:
1. ¿La versión del plugin utilizado es la versión necesaria para el firmware?
2. En caso afirmativo se comparan los datos del proyecto.
3. En caso contrario se rechaza el plugin. Se visualiza un mensaje en la ventana “Output” (Salida).
Nota: La versión del firmware no se compara.

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 193
– Si el plugin utilizado en el proyecto no es de la versión requerida no se establece el enlace de
equipos.
El plugin lo comunica con una ventana de mensaje “Conflicto de versión del plugin” y genera una
entrada en la ventana “Output” (Salida) � Fig. A.11. La versión del plugin utilizada actualmente se
visualiza en la barra de estado en la parte inferior derecha.
Fig. A.11 Visualización de la versión del plugin utilizada
– En cuanto se ha establecido correctamente un enlace de equipos se visualizan las versiones del
plugin requeridas por el CMAX en la página “Controller” (Controlador), en el registro “Compatibility”
(compatibilidad) � Fig. A.12.
Fig. A.12 Indicación de las versiones en la página “Controller” (Controlador)

A Notas sobre la puesta a punto, asistencia técnica y firmware
194 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
A.7 Preguntas frecuentes sobre las versiones del firmare y del plugin
¿Dónde encuentro la información sobre las versiones de mis sistema?
Con el comando [Help] (Ayuda) [Info about installed PlugIns] (Información sobre plugins instalados) se
visualiza una lista de las versiones instaladas del plugin más recientes.
Fig. A.13 Información sobre plugins instalados
Cuando se incorpora un componente nuevo debe seleccionarse la versión deseada � Fig. A.15.
El plugin con el que se ha generado el componente de CMAX en el proyecto se muestra en la página
“Controller” (Controlador), en el registro “Compatibility” (compatibilidad) � Fig. A.12.
En cuanto se ha establecido correctamente un enlace de equipos se visualiza las versión del firmware
del CMAX en la página “Controller” (Controlador), en el registro “Device data” (Datos del equipo) ; la
versión del plugin utilizada actualmente se muestra en la barra de estado de la ventana del FCT
� Fig. A.14.

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 195
Fig. A.14 Indicación de la versión del firmware y de la versión utilizada del plugin
¿Puedo abrir un proyecto antiguo con un plugin nuevo?Un componente creado en un proyecto con un plugin antiguo no se puede actualizar con un plugin
nuevo.
Sin embargo es posible un Upload (carga) desde un CMAX conectado � Pregunta siguiente.
¿Cómo cargo un proyecto antiguo en un CMAX nuevo?Esto es posible si el CMAX antiguo está disponible. Primero se tiene que cargar el proyecto antiguo en
el CMAX antiguo. A continuación se debe crear un componente con el plugin nuevo y cargar los datos
del proyecto del CMAX antiguo en el proyecto mediante Upload (carga) � Pregunta “¿Cómo puedo
cargar un proyecto de un CMAX antiguo en un plugin nuevo?”.
Nota: Si desea ejecutar una actualización del firmware, tenga en cuenta las notas de � Sección A.8.
Consejo: Los datos del proyecto antiguo se pueden guardar con la función “Exportar tabla PNU” y a
continuación se pueden cargar en el proyecto nuevo con “Importar tabla PNU” (� Ayuda online del
plugin). Con estas funciones no se necesita ningún CMAX como “memoria intermedia”.

A Notas sobre la puesta a punto, asistencia técnica y firmware
196 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
¿Puedo utilizar un plugin antiguo en un proyecto nuevo?En general Festo recomienda utilizar siempre la versión más reciente del plugin.
No obstante, para utilizar una versión anterior del plugin, esta se puede seleccionar en el proyecto al
incorporar un componente nuevo:
Fig. A.15 Selección de la versión del plugin al incorporar un componente nuevo
¿Puedo cargar un proyecto creado con el plugin 2.2 en un CMAX con firmware 1.1?
Sí, se puede hacer sin problemas. Las funciones no compatibles con el firmware antiguo no se pueden
utilizar.
¿Cómo cargo un firmware nuevo en un CMAX con firmare más antiguo?Cargar archivo nuevo de firmware desde el portal de soporte técnico: � www.festo.com/sp. Después
continuar como se describe en � Sección A.8.
¿Es posible cargar un firmware antiguo en un CMAX nuevo?Sí, es posible. Cargar el archivo antiguo de firmware desde el portal de soporte técnico:
� www.festo.com/sp. Después continuar como se describe en � Sección A.8.
¿Cómo puedo cargar un proyecto de un CMAX antiguo en un plugin nuevo?Todos los plugins son compatibles con todas las versiones del firmware publicadas hasta el momento.
en el proyecto debe crearse un componente con la versión nueva. Al activar el enlace de equipos
aparece automáticamente el asistente de la sincronización del hardware, con el cual se transmiten los
datos del proyecto desde el CMAX al proyecto � Sección A.8, paso 3.

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 197
A.8 Procedimiento para la actualización del firmware
Esta descripción se refiere al una actualización del firmware en un equipo existente. Los toman los
datos que había hasta ahora del CMAX utilizado.
A.8.1 Resumen de los pasos necesarios para descargar el firmware1. Es necesario disponer del archivo de firmware deseado. Este se puede descargar desde el portal de
soporte técnico de Festo � www.festo.com/sp, término de búsqueda: “CPX-CMAX-C1-1”. Los
archivos de firmware se cargan en un archivo comprimido y se tienen que descomprimir antes de
importarlos al FCT. Además de los archivos de firmware, hay un archivo Readme que contiene
información sobre las últimas modificaciones y sobre el plugin necesario.
2. El plugin necesario debe instalarse en el PC. También se puede descargar desde el portal de soporte
técnico. Recomendación: Utilice siempre el plugin más reciente. Después de la descarga debe
ejecutarse el archivo Setup (p. ej. Setup_CMAX_V1_8_0_11.exe).
3. Poner el equipo en un estado seguro. Restablecer todos los datos de salida del control para el
CMAX, es decir, poner los bytes 1 … 8 en 0. El control no debe bloquear el acceso para el FCT.
Recomendación: El control debería conmutarse al estado de parada. Si es posible, separar
físicamente la conexión del bus con el terminal CPX, p. ej. extraer el cable de bus del terminal CPX.
4. Crear un proyecto nuevo en el FCT e incorporar en él un componente de CMAX con el nuevo plugin.
5. Establecer la conexión con el CMAX con dicho componente. Aparece al asistente para la
comparación de hardware. Con el botón “Upload project” (Cargar proyecto) del asistente es posible
leer el proyecto completo. Guardar el proyecto después de la lectura.
6. Abrir el diálogo de descarga de firmware: Menú [Component] (Componente) [Firmware Download]
(Descarga de firmware).
7. Importar el archivo de firmware deseado.
8. Ejecutar la descarga del firmware. La descarga puede durar entre 3 y 40 minutos dependiendo del
nodo de bus utilizado.
9. Establecer la conexión con el CMAX una vez finalizada la descarga. Se abre el asistente de
configuración. Si el proyecto se ha leído previamente, se puede volver a transmitir por completo al
CMAX con el botón “Download project” (Descargar proyecto).
10.Antes de la siguiente puesta a punto comprobar si es necesario adaptar nuevos ajustes o
parámetros.
11.Continuar con la puesta a punto: Ejecutar prueba de movimiento, recorrido de referencia (con
DNCI/DDPC) e identificación.
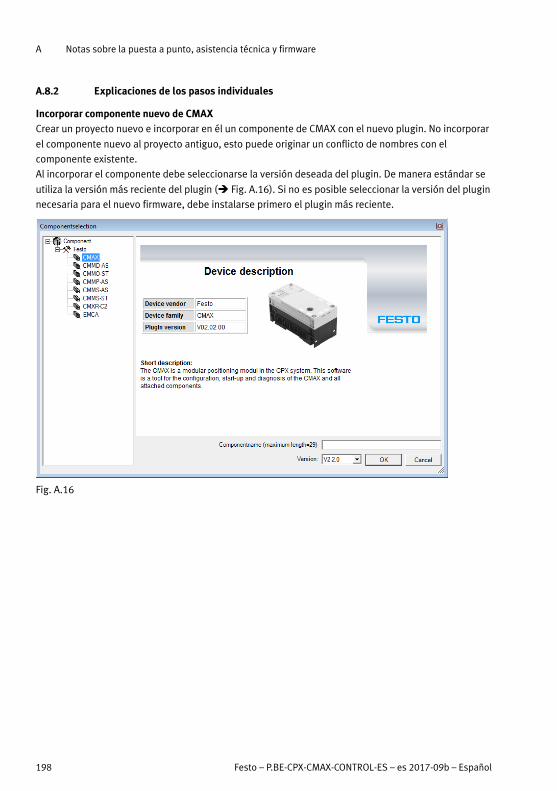
A Notas sobre la puesta a punto, asistencia técnica y firmware
198 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
A.8.2 Explicaciones de los pasos individuales
Incorporar componente nuevo de CMAXCrear un proyecto nuevo e incorporar en él un componente de CMAX con el nuevo plugin. No incorporar
el componente nuevo al proyecto antiguo, esto puede originar un conflicto de nombres con el
componente existente.
Al incorporar el componente debe seleccionarse la versión deseada del plugin. De manera estándar se
utiliza la versión más reciente del plugin (� Fig. A.16). Si no es posible seleccionar la versión del plugin
necesaria para el nuevo firmware, debe instalarse primero el plugin más reciente.
Fig. A.16
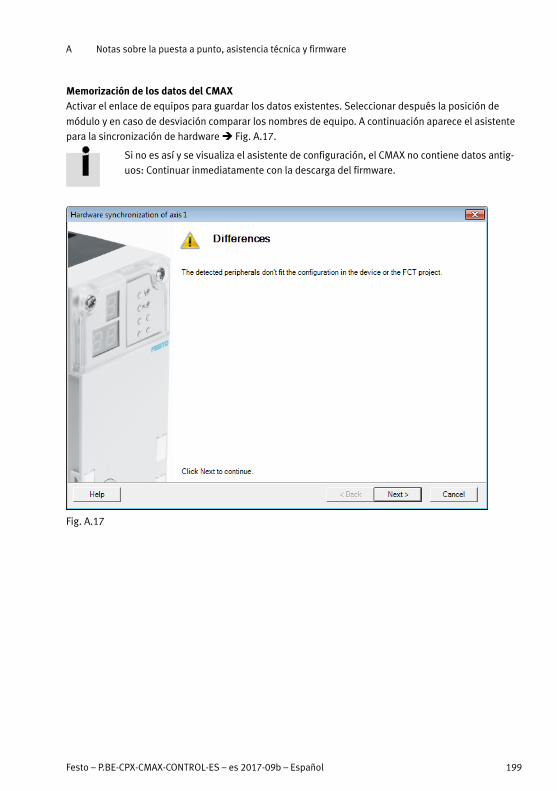
A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 199
Memorización de los datos del CMAXActivar el enlace de equipos para guardar los datos existentes. Seleccionar después la posición de
módulo y en caso de desviación comparar los nombres de equipo. A continuación aparece el asistente
para la sincronización de hardware � Fig. A.17.
Si no es así y se visualiza el asistente de configuración, el CMAX no contiene datos antig
uos: Continuar inmediatamente con la descarga del firmware.
Fig. A.17

A Notas sobre la puesta a punto, asistencia técnica y firmware
200 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Hacer clic en “Next” (Continuar). En la página siguiente se visualiza la comparación de las
configuraciones actuales. Con el botón “Upload project” (Cargar proyecto) todos los datos del proyecto
se transmiten desde el CMAX al componente nuevo.
Fig. A.18
A continuación guardar el proyecto.

A Notas sobre la puesta a punto, asistencia técnica y firmware
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 201
Descarga del firmwareEn el menú principal del FCT, abrir la ventana para la descarga del firmware con [Component] [Firmware
Download]. En “Available Firmware Files” (Archivos de firmware disponibles) se muestran todos los
archivos de firmware del CMAX importados. Si el firmware nuevo aún no figura en la lista, añadir el
archivo de firmware desde el directorio utilizado anteriormente con “Import” (descomprimirlo
previamente si no es un archivo BIN).
Fig. A.19
NotaLa descarga del firmware borra todos los datos del CMAX. Con un “proyecto antiguo” ya
no es posible establecer una conexión con el CMAX.
A continuación debe seleccionarse el software deseado y hacer clic en “Download”.

A Notas sobre la puesta a punto, asistencia técnica y firmware
202 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Restablecer datos guardados/configurar datos nuevosVolver a establecer el enlace de equipos con el CMAX después de descargar el firmware. Con el botón
“Download project” del asistente de configuración se transmiten los datos guardados al CMAX.
Nota: Todavía no está permitido conectar periféricos.
Fig. A.20
Con este paso finaliza la descarga del firmware y la transmisión de los datos.

B Fundamentos del CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 203
B Fundamentos del CMAX
B.1 Sistemas de medida del CMAX
B.1.1 Definición de las tablas del sistema de medida
El CMAX puede operarse en el sistema de medida métrico/internacional (SI) o en el sistema imperial
(Inch). Admite movimientos lineales y rotatorios.
Al combinarlos se obtienen 4 tablas de sistemas de medida para todas las magnitudes físicas y de
regulación utilizadas en el CMAX:
Selección del sistemade medida
Selección del movimiento (accionamiento)
� Tabla de sistema de medida
Métrico/SI Movimiento lineal
(actuador lineal, cilindro)
� Tab. B.2
Movimiento rotativo
(actuador giratorio)
� Tab. B.3
Imperial Movimiento lineal
(actuador lineal, cilindro)
� Tab. B.4
Movimiento rotativo
(actuador giratorio)
� Tab. B.5
Tab. B.1 Tablas posibles de sistemas de medida
Siempre es válida únicamente una de las tablas posibles de sistemas de medida y esta se determina
automáticamente al seleccionar el sistema de medida y el tipo de movimiento al crear un proyecto y al
descargar los datos de proyecto (� Apéndice B.1.2). La tabla de sistema de medida utilizada
realmente en el CMAX está guardada en el PNU 1192:06 y se puede consultar.
Una tabla de sistema de medida se compone siempre de 2 tablas parciales, una para la unidad y otra
para la resolución/escalado. Ambas de pueden consultar en el CMAX:
– PNU 1193: Tabla para las unidades,
– PNU 1194: Tabla para la resolución/escalado.
Con la tabla de sistemas de medida se definen la unidades y resoluciones de las 12 magnitudes físicas
del sistema utilizadas, p. ej. � Tab. B.2.
Dependiendo del sistema de medida utilizado (SI o Imperial) y del tipo de movimiento (lineal o
rotativo), la unidad puede adoptar diferentes valores, p. ej. un valor de posición o ángulo (índice 1 en
Tab. B.2 a Tab. B.5) puede adoptar la unidad milímetros, pulgadas o grados.
La resolución/escalado de una magnitud física describe el número de cifras decimales y por tanto la
precisión utilizada. La resolución se indica como exponente de 10. P. ej., un valor de -3 significa 10-3, es
decir, 3 cifras decimales.

B Fundamentos del CMAX
204 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Ejemplo de aceleración (� Índice 7 en Tab. B.2)El PNU 1193:07 contiene el valor 60, que representa la unidad “Metro por segundo cuadrado” [m/s2].
El PNU 1194:07 contiene -3 para la resolución, que representa 10-3, es decir, 3 cifras decimales.
Por lo tanto un valor numérico tiene la forma XX,xxx. Por ejemplo, si en el PNU 541 (aceleración en
modo directo) figura el valor numérico 2550, este se interpreta como 2,550 m/s2.
Tablas de sistemas de medida
Unidad (PNU 1193) Resolución(PNU 1194)Índice Magnitud física Valor Unidad Símbolo
1 Posición 10 Milímetro mm -2
2 Longitud 10 Milímetro mm -2
3 Fuerza 20 Newton N 0
4 Presión 30 Bar bar -1
5 Masa 40 Kilogramo kg -1
6 Velocidad 50 Metro por segundo m/s -3
7 Aceleración 60 Metro por segundo
cuadrado
m/s2 -3
8 Rampa de fuerza 70 Newton por segundo N/s 0
9 Tiempo 80 Milisegundo ms 0
10 Factor de regulación 100 – (No existe) – -2
11 Diámetro 10 Milímetro mm -2
12 Ángulo de montaje 15 Grado ° -1
Tab. B.2 Tabla de sistema de medida Actuador lineal – Métrico/Si (PNU 1192:06, valor = 1)
Unidad (PNU 1193) Resolución(PNU 1194)Índice Magnitud física Valor Unidad Símbolo
1 Escuadra 15 Grado ° -1
2 Ángulo de giro 15 Grado ° -1
3 Momento de giro 25 Newtonmetro NM 0
4 Presión 30 Bar bar -1
5 Momento de inercia de
la masa
45 Kilogramo centímetro cuadrado kg cm2 0
6 Velocidad angular 56 Grado por segundo °/s 0
7 Aceleración angular 66 Grado por segundo cuadrado °/s2 0
8 Rampa del momento de
giro
75 Newtonmetro por segundo Nm/s 0
9 Tiempo 80 Milisegundo ms 0
10 Factor de regulación 100 – (No existe) – -2
11 Diámetro 10 Milímetro mm -2
12 Ángulo de montaje 15 Grado ° -1
Tab. B.3 Tabla de sistema de medida Actuador giratorio – Métrico/Si (PNU 1192:06, valor = 3)

B Fundamentos del CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 205
Unidad (PNU 1193) Resolución(PNU 1194)Índice Magnitud física Valor Unidad Símbolo
1 Position 11 Inch en -3
2 Length 10 Millimeter1) mm -2
3 Force 22 Pound-force lbf 0
4 Pressure 33 Psi psi 0
5 Mass 41 Pound lb 0
6 Velocity 51 Feet per second ft/s -2
7 Acceleration 61 Feet per second squared ft/s2 -2
8 Force ramp 72 Pound-force per second lbf/s 0
9 Time 80 Milliseconds ms 0
10 Controller factor 100 – (No existe) – -2
11 Diameter 10 Millimeter1) mm -2
12 Mounting angle 11 Degrees ° -1
1) En el FCT se indica, además, en pulgadas
Tab. B.4 Tabla de sistema de medida Actuador lineal – Imperial (PNU 1192:06, valor = 2)
Unidad (PNU 1193) Resolución(PNU 1194)Índice Magnitud física Valor Unidad Símbolo
1 Ángulo 15 Degrees ° -1
2 Swivel angle 15 Degrees ° -1
3 Torque 26 Pound-force foot lbf ft 0
4 Pressure 33 Pound per square inch psi 0
5 Moment of inertia 47 Pound-force square inch lb in2 -1
6 Angular velocity 56 Degrees per second °/s 0
7 Angular acceleration 66 Degrees per second squared °/s2 0
8 Torque ramp 76 Pound-force-foot per second lbf ft/s 0
9 Time 80 Milliseconds ms 0
10 Controller factor 100 – (No existe) – -2
11 Diameter 10 Millimeter1) mm -2
12 Mounting angle 15 Degrees ° -1
1) En el FCT se indica, además, en pulgadas
Tab. B.5 Tabla de sistema de medida Actuador giratorio – Imperial (PNU 1192:06, valor = 4)

B Fundamentos del CMAX
206 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
B.1.2 Activación de la tabla de sistema de medidaEn estado de entrega o después de un reset de datos, en el CMAX no hay ningún sistema de medida
predeterminado. En este caso, después de la conexión la pantalla muestra el estado “C00”.
En primer lugar debe determinarse el sistema de medida. A tal fin debe escribirse el valor 1 o 2 en el
PNU 1192:05. Con el FCT esto se realiza mediante el asistente de configuración.
Después el CMAX adopta el estado “C01”. La configuración del tipo de accionamiento (en el estado
“C01”) resuelve si utilizar un sistema de medida para un movimiento lineal o rotativo
(� Apéndice A.1.2, Fig. A.1).
Solo después de finalizar estos 2 pasos se configurarán los demás parámetros correspondientemente,
p. ej. la configuración real se escala en las unidades de medida fijadas, se fijan los valores
predeterminados y se permite el acceso a los demás parámetros.
Las unidades determinadas se utilizan para todos los valores numéricos, p. ej., también
para los valores nominal principal y efectivo en los datos I/O.
No es posible conmutar entre los distintos sistemas de medida. Si es necesario modificar el sistema de
medido deberá ejecutarse un reset de datos del eje. A continuación puede ejecutarse una nueva
puesta a punto con el nuevo sistema de medida.
B.1.3 Tabla de referencia y conversión de las unidades de medida
Unidad de medida (PNU 1193)
Índice Magnitudfísica
Accionam
iento1)
Valor Unidad Símbolo Conversión
1 Posición
(ángulo)
L 10 Milímetro mm = 0,03937 in
L 11 Inch en = 25,4 mm
G 15 Grado ° –
2 Longitud
(ángulo de
rotación)
L 10 Millímetro3) mm = 0,03937 in
G 15 Grado ° –
3 Fuerza
(momento
de giro)
L 20 Newton N = 0.22481 lbf
L 22 Pound-force lbf = 4,44822 N
G 25 Newtonmetro NM = 0,73756 lbf ft
G 26 Pound-force foot lbf-ft = 1,35582 Nm
4 Presión T 30 Bar bar = 100�000 Pa
T 33 Pound per square inch psi = 0,06895 bar
1) Tipo de accionamiento: T = Todos, L = Lineal, G = giratorio/rotatorio
2) En el FCT: Indicación en mm e indicación adicional en pulgadas entre paréntesis

B Fundamentos del CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 207
Unidad de medida (PNU 1193)
Índice ConversiónSímboloUnidadValorAccionam
iento1)
Magnitudfísica
5 Masa
(momento
de inercia de
la masa)
L 40 Kilogramo kg = 2,20462 lb
L 41 Pound lb = 0,45359 kg
G 45 Kilogramo centímetro
cuadrado
kg cm2 = 23,73036 * 10-4 lb ft2
G 47 Pound force square inch lb in2 = 2,9264 kg m2
6 Velocidad
(velocidad
angular)
L 50 Metro por segundo m/s = 3,28084 ft/s
L 51 Feet per second ft/s (fps) = 0,3048 m/s
G 55 Grado por segundo °/s –
G 56 1000 grados por segundo 1000°/s –
7 Aceleración
(aceleración
angular)
L 60 Metro por segundo
cuadrado
m/s2 = 3,28084 ft/s2
L 61 Feet per second squared ft/s2 = 0,3048 m/s2
G 65 Grado por segundo
cuadrado
°/s2
G 66 1000 grados por segundo
cuadrado
1000°/s2
8 Rampa de
fuerza
(rampa de
momento de
giro)
L 70 Newton por segundo N/s = 0,22481 lbf/s
L 72 Pound-force per second lbf/s = 4,44822 N /s
G 75 Momento por segundo Nm/s = 0,73756 lbf ft/s
G 76 Pound-force-foot per
second
lbf ft/s = 1,35582 Nm/s
9 Tiempo T 80 Milisegundo ms –
81 Segundo s –
10 Factor de
regulación
T 100 – (No existe) – –
11 Diámetro T 10 Millímetro3) mm = 0,03937 in
12 Ángulo de
montaje
T 15 Grado ° –
1) Tipo de accionamiento: T = Todos, L = Lineal, G = giratorio/rotatorio
2) En el FCT: Indicación en mm e indicación adicional en pulgadas entre paréntesis
Tab. B.6 Unidades de medida con conversión

B Fundamentos del CMAX
208 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
B.2 Sistema de referencia de medida para actuadores neumáticos
B.2.1 Sistema de referencia de medida con sistema de medición de recorrido absoluto
Sistema de referencia de medida de accionamientos lineales con sistema de medición de recorridoabsoluto
AZ PZ TP/AP USELSE
Posiciones cada vez mayores, desplazamiento “positivo”
SZ
1
2 3
4
5
6
8
9
7
1 Carrera de trabajo AZ,
SZ
Punto cero del eje (Axis Zero point) = Punto cero
del sensor / sistema de medición (Measuring
system Zero point)2 Decalaje del punto cero del eje (a’)
3 Decalaje del punto cero del
proyecto (b)1)PZ Punto cero del proyecto (Project Zero point)
4 Decalaje de la posición final
superior por software (d)1)USE Posición final superior por software (Upper
Software End position)
5 Decalaje de la posición final inferior
por software (e)1)LSE Posición final inferior por software (Lower
Software End position)
6 Carrera útil TP,
AP
Posición de destino/real (Target Position, Actual
Position)7 Distancia entre carro y carro
adicional KR (f )1)
8 Distancia entre carro y carro
adicional KL (g)1)9 Decalaje posición destino/real (c)
1) El usuario debe introducir las especificaciones siempre que no puedan ser detectadas (p .ej., longitud del cilindro y del sistema de
medición de recorrido con DGCI)
2) Especificaciones del usuario para opciones adicionales � Sección B.2.5
Tab. B.7 Sistema de referencia de medida para actuadores lineales

B Fundamentos del CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 209
Sistema de referencia de medida para actuador giratorio DSMI
AZ
PZ
TP/AP
USE
LSE
Posiciones cada vezmayores,
desplazamiento “positivo”SZ
1
2
3
4
69
5
1 Carrera de trabajo SZ Punto cero del sistema de medición (Measuring
system Zero point)
2 Decalaje del punto cero del eje
(a’)1)AZ Punto cero del eje (Axis Zero point)
3 Decalaje del punto cero del
proyecto (b)1)PZ Punto cero del proyecto (Project Zero point)
4 Decalaje de la posición final
superior por software (d)1)USE Posición final superior por software (Upper
Software End position)
5 Decalaje de la posición final inferior
por software (e)1)LSE Posición final inferior por software (Lower
Software End position)
6 Carrera útil TP,
AP
Posición de destino/real (Target Position, Actual
Position)9 Decalaje posición destino/real (c)
1) Especificaciones del usuario
Tab. B.8 Sistema de referencia de medida DSMI
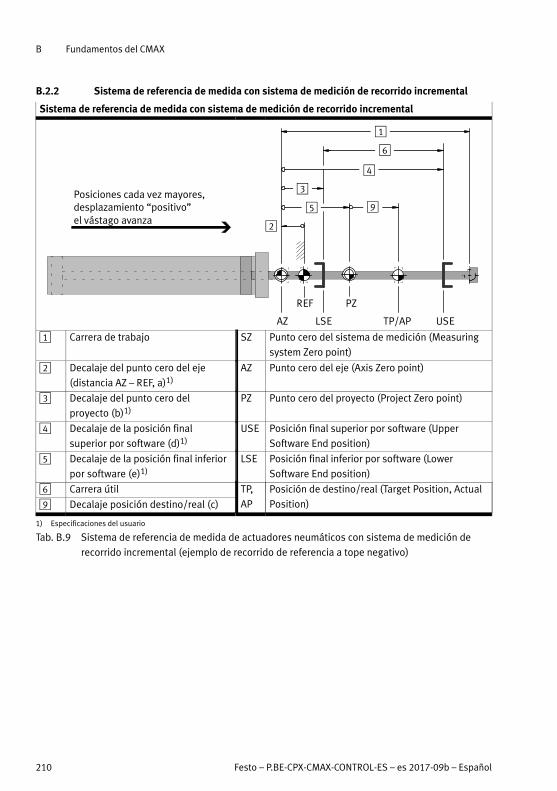
B Fundamentos del CMAX
210 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
B.2.2 Sistema de referencia de medida con sistema de medición de recorrido incremental
Sistema de referencia de medida con sistema de medición de recorrido incremental
PZ
TP/AP USE
Posiciones cada vez mayores,desplazamiento “positivo” el vástago avanza
AZ
REF
LSE
1
2
3
4
5
6
9
1 Carrera de trabajo SZ Punto cero del sistema de medición (Measuring
system Zero point)
2 Decalaje del punto cero del eje
(distancia AZ – REF, a)1)AZ Punto cero del eje (Axis Zero point)
3 Decalaje del punto cero del
proyecto (b)1)PZ Punto cero del proyecto (Project Zero point)
4 Decalaje de la posición final
superior por software (d)1)USE Posición final superior por software (Upper
Software End position)
5 Decalaje de la posición final inferior
por software (e)1)LSE Posición final inferior por software (Lower
Software End position)
6 Carrera útil TP,
AP
Posición de destino/real (Target Position, Actual
Position)9 Decalaje posición destino/real (c)
1) Especificaciones del usuario
Tab. B.9 Sistema de referencia de medida de actuadores neumáticos con sistema de medición de
recorrido incremental (ejemplo de recorrido de referencia a tope negativo)

B Fundamentos del CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 211
B.2.3 Cálculo de las especificaciones del sistema de referencia
Punto cero del eje y punto cero del cilindro
¡En actuadores lineales servoneumáticos el punto cero del eje debe estar siempre sobreel punto cero del cilindro!
El punto cero del cilindro es el tope mecánico de accionamiento en sentido negativo.
Esto es importante porque el controlador requiere la posición absoluta del émbolo dentro
del cilindro. En consecuencia, el decalaje del punto cero del eje (vector a o a’) tiene que
especificarse siempre.
Puntos de referencia en sistemas de medición absolutos
Punto de referencia Regla de cálculo
Punto cero del eje AZ = SZ a’
Punto cero del proyecto PZ = AZ b = SZ a’ b
Posición final inferior por software LSE = AZ d = SZ a’ d
Posición final superior por software USE = AZ e = SZ a’ e
Posición destino/actual TP, AP = PZ c = AZ b c = SZ a’ b + c
Tab. B.10 Reglas de cálculo del sistema de referencia de medida con sistemas de medida absolutos
Observación acerca de los sistemas de medición de recorrido absolutosEn los cálculos para accionamientos con sistemas de medición de recorrido que transmiten el valor
absoluto (sólo neumáticos), el punto cero del eje se toma respecto al punto cero del sistema de
medición (punto cero del sensor, a’ en lugar de a). El resto de las magnitudes derivadas son idénticas.
A tener en cuenta al utilizar opciones adicionales � Sección B.2.5.
Puntos de referencia en sistemas de medición incrementales
Punto de referencia Regla de cálculo
Punto cero del eje AZ = REF a
Punto cero del proyecto PZ = AZ b = REF a b
Posición final inferior por software LSE = AZ d = REF a d
Posición final superior por software USE = AZ e = REF a e
Posición destino/actual TP, AP = PZ c = AZ b c = REF a b + c
Tab. B.11 Reglas para calcular el sistema de referencia de medida con sistemas de medición de recor
rido incrementales
Observación acerca de los sistemas de medición de recorrido incrementalesEl “Decalaje del punto cero del eje” debe tener siempre un valor negativo, ya que el punto del eje se
define siempre igual al punto cero del cilindro.

B Fundamentos del CMAX
212 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Caso especial sistema de medición digital MME (externo o con accionamiento definido por el usuario,p. ej. para DGPI)
Siempre tiene que tenerse en cuenta un decalaje adicional del punto cero del eje de 28 mm (además la
longitud interna del sistema de medición siempre debe ser 28 mm más larga que la especificación de la
placa de características). Durante la parametrización con el plugin FCT esto lo calcula y transmite
automáticamente el plugin.
Parámetro Plugin => CMAX (el plugin escribe) CMAX => Plugin (el plugin lee)
Longitud del sistema de
medición (ML)
ML (CMAX)
= ML (usuario) + 28,00 mm
ML (usuario)
= ML (CMAX) – 28,00 mm
Decalaje del punto cero
del eje (AZ)
AZ (CMAX)
= AZ (usuario) + 28,00 mm
AZ (usuario)
= AZ (CMAX) – 28,00 mm
Ejemplo:
Parámetro Valor en el plugin (visualizado) Valor en el CMAX (transmitido)
Longitud del sistema de
medición
500.00 mm 528.00 mm
Offset del punto cero
del eje
12.00 mm 40,00 mm
Tab. B.12 Cálculo del sistema de medición digital MME (externo o con accionamiento definido por el
usuario, p. ej. para DGPI)

B Fundamentos del CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 213
B.2.4 Posiciones finales por software / hardwareLas posiciones finales por software pueden activarse en función del hardware planificado solo dentro de unos
límites determinados. Para ello se tienen en cuenta los parámetros como se muestra en Fig. B.1.
CZ/AZ USELSESZ
1
3
5 6 7 8
2
4
1 Longitud sistema de medición: PNU 11112 Longitud cilindro: PNU 11013 Decalaje del punto cero del eje: PNU 11304 Punto cero del sistema de medición5 Posición final inferior por hardware
= posición final inferior por software mínimaadmisible
6 Posición final inferior por software:PNU 501:01
7 Posición final superior por software:PNU 501:02
8 Posición final superior por hardware = posición final superior por softwaremáxima admisible
Fig. B.1 Parámetros de las posiciones finales por software, ejemplo con actuador lineal con sistema
de medición absoluto
Sistema de medición de recorrido absolutoLos límites se obtienen a partir de la longitud del sistema de medición de recorrido y del cilindro, así
como del desplazamiento de montaje entre ambos. El desplazamiento de montaje equivale al offset
entre el punto cero del sistema de medición de recorrido y el punto cero del eje.
A tener en cuenta al utilizar opciones adicionales � Sección B.2.5.
Sistema de medición de recorrido incremental integradoLos límites resultan de la longitud del cilindro.
Los valores límite máximos permitidos se denominan “Posiciones finales por hardware”. Si el usuario
ajusta ambas posiciones finales por software a 0, para desactivarlas, todos los valores de referencia se
limitan a las posiciones finales por hardware.
Si la regulación de posición está activa, la tolerancia ajustada se tiene en cuenta. De este modo, las
pequeñas imprecisiones de posicionado al avanzar a las posiciones finales por software no causan
errores.

B Fundamentos del CMAX
214 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Diferenciación de casos para sistemas de medición de recorrido externos
Disposición Descripción
PNU 1130 PNU 1101
Cilindro
Sistema de medición de recorrido
PNU 1111
El sistema de medición sobrepasa al cilindro por ambosextremos
Decalaje del punto cero del eje: PNU 1130 >= 0PNU 1130 + PNU 1101 <= PNU 1111} SWEL inferior mínimo admisible = 0
SWEL superior máximo admisible = PNU 1101
PNU 1130 PNU 1101
Cilindro
Sistema de medición de recorrido
PNU 1111
El cilindro sobrepasa al sistema de medición en el finalDecalaje del punto cero del eje: PNU 1130 >= 0PNU 1130 + PNU 1101 > PNU 1111} SWEL inferior mínimo admisible = 0
SWEL superior máximo admisible = PNU1111 -
PNU1130
PNU 1101
Cilindro
Sistema de medición de recorrido
PNU 1111PNU 1130
El cilindro sobrepasa al sistema de medición en el inicioDecalaje del punto cero del eje: PNU 1130 < 0| PNU 1130 | + PNU 1111 >= PNU 1101} SWEL inferior mínimo admisible = | PNU 1130 |
SWEL superior máximo admisible = PNU1101
PNU 1101
Cilindro
Sistema de medición de recorrido
PNU 1111PNU 1130
El cilindro sobrepasa al sistema de medición por ambosextremos
Decalaje del punto cero del eje: PNU 1130 < 0| PNU 1130 | + PNU 1111 < PNU 1101} SWEL inferior mínimo admisible = | PNU 1130 |
SWEL superior máximo admisible = | PNU 1130 | +
PNU 1111
Sistemas integrados de medición de recorrido
Disposición Descripción
PNU 1101
Cilindro
Sistema de medición de recorrido
PNU 1111
El cilindro y el sistema de medición se solapan porcompletoDGCI, DDLI: Decalaje del punto cero del eje: PNU 1130 = 0
DNCI, DDPC: Decalaje del punto cero del eje: PNU 1130 <= 0
PNU 1111 = PNU 1101
} SWEL inferior mínimo admisible = 0
SWEL superior máximo admisible = PNU 1101PNU 1101
Cilindro
Sistema de medición de recorrido
PNU 1111
PNU 1130 El sistema de medición sobrepasa al cilindro por ambosextremosDSMI: Decalaje del punto cero del eje: PNU 1130 = 5° ... 15°
PNU 1130 + PNU 1101 <= PNU 1111
} SWEL inferior mínimo admisible = 0
SWEL superior máximo admisible = PNU 1111

B Fundamentos del CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 215
Configuración a través del FCTLas posiciones finales por software están desactivadas por defecto en el FCT. La especificación de PNU
501:01 = PNU 501:02 = 0 causa la desactivación de las posiciones finales por software. En todo caso,
el CMAX limita los valores de referencia a las posiciones finales máxima o mínima admisibles.
Con DGCI/DDLI no puede editarse el punto cero del eje.
Ejemplo de cifras
Disposición PNU Descripción Valor
PNU 1101
Cilindro
Sistema de medición de recorrido
PNU 1111PNU 1130
1130 Offset del punto cero del eje Ancho de
25,5 mm
1111 Longitud del sistema de
medición de recorrido
280 mm
1101 Longitud del actuador Ancho de
350 mm
El CMAX calcula los valores límite siguientes para las dos posiciones finales:
PNU Descripción Mínimo Máximo
501:01 Posición final inferior por
hardware, posición final inferior
mínima por software
Ancho de 25,5 mm < posición final superior
por software
501:02 Posición final superior por
hardware, posición final
superior máxima por software
> posición final inferior por
software
280 - 25,5 = 254,5 mm

B Fundamentos del CMAX
216 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
B.2.5 Consideración de opciones de accionamiento del DGCI con el sistema de referencia demedida
Con el DGCI se pueden configurar distintas opciones que influyen en las posiciones finales por
software, en la carrera de trabajo, etc.
Recomendaciones:
– Ejecutar la primera puesta a punto con el plugin FCT CMAX; el plugin tiene en cuenta las opciones
seleccionadas.
– Los resultados óptimos de la puesta a punto se obtienen con el CMAX a partir del firmware V2.2 y
del plugin V2.2.
Opción Descripción
Unidad de bloqueo
-1H-PN
Ejecución de 1 canal, para sujetar cargas. Sin reducción de carrera; prolongación
del accionamiento equivalente a la longitud de la unidad de bloqueo.
Carro adicional
-KL
-KR
-KL-KR
Carro adicional de movimiento sincronizado para aumentar los pares,
opcionalmente a la derecha, a la izquierda o a la izquierda y a la derecha.
Adaptador de
lubricación
-C
Con el adaptador de lubricación es posible lubricar la guía de manera continua
mediante un sistema de relubricación automático o semiautomático. No debe
utilizarse en combinación con la guía de rodamiento de bolas protegida GP.
Guía de rodamiento
de bolas protegida
-GP
La guía protegida limpia el carril de guía y protege la guía de rodamiento de
bolas mediante un rascador adicional y una unidad de lubricación.
Tab. B.13 Opciones con el DGCI
Cada opción influye en la carrera o bien en la longitud del cilindro.
– “KR” y “KL”: Los carros adicionales reducen la carrera de trabajo. Las posiciones finales por
software deberían establecerse correspondientemente para que el accionamiento no se desplace a
uno de los topes.
– “1H”: La unidad de bloqueo no reduce la carrera de trabajo; el accionamiento es respectivamente
más largo. El controlador debe parametrizarse conforme a ello para poder funcionar correctamente.
– “C” y “GP”: Con el carro estándar, la parte saliente del adaptador de lubricación y de la guía
protegida tienen espacio detrás de los topes fijos y por lo tanto el carro no reduce la carrera. Las
opciones deben tenerse en cuenta al utilizar los carros adicionales.
Las opciones se guardan en el CMAX a partir del firmware V2.2 � PNU 1104, opciones
de DGCI.

B Fundamentos del CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 217
Efecto en los parámetros
PNU Parámetro Explicación
501:1 Posición final inferior
por software
Si las posiciones finales por software no son correctas, el
accionamiento se desplazará a una de las posiciones finales a
elevada velocidad. Esto sucede por primera vez durante la
identificación dinámica, que utiliza la carrera de trabajo
máxima. El plugin ayuda al usuario a determinar las posiciones
finales por software correctas.
501:2 Posición final
superior por software
Tab. B.14
Información adicional en PNU 1190:15
Bit Código delproducto
Descripción Valores
7 – Programación =1: La información adicional se ha programado
cuando al menos otro bit es igual a 0.
= 0: La información adicional no se ha
programado (fecha de fabricación del DGCI
antes de mediados de 2015)
6 – Reservado = 0
5 – Reservado = 0
4 C Lubricación = 0: Estándar
= 1: Lubricación central
3 GP Carro = 0: Guía de rodamiento de bolas
= 1: Guía de rodamiento de bolas protegida
2 1H-PN Unidad de bloqueo = 0: No disponible
= 1: Disponible
1 KL Carro adicional a la iz
quierda
= 0: No disponible
= 1: Disponible
0 KR Carro adicional a la
derecha
= 0: No disponible
= 1: Disponible
Tab. B.15 Opciones en PNU 1190:15
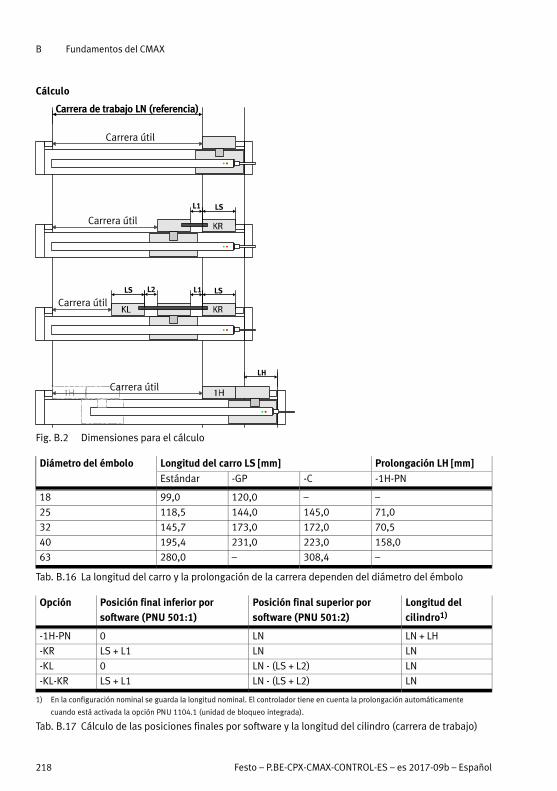
B Fundamentos del CMAX
218 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Cálculo
Carrera de trabajo LN (referencia)
Carrera útil
Carrera útil
Carrera útil
Carrera útil
LSL1
LSL1LS L2
LH
Fig. B.2 Dimensiones para el cálculo
Diámetro del émbolo Longitud del carro LS [mm] Prolongación LH [mm]
Estándar -GP -C -1H-PN
18 99,0 120,0 – –
25 118,5 144,0 145,0 71,0
32 145,7 173,0 172,0 70,5
40 195,4 231,0 223,0 158,0
63 280,0 – 308,4 –
Tab. B.16 La longitud del carro y la prolongación de la carrera dependen del diámetro del émbolo
Opción Posición final inferior porsoftware (PNU 501:1)
Posición final superior porsoftware (PNU 501:2)
Longitud delcilindro1)
-1HPN 0 LN LN + LH
-KR LS + L1 LN LN
-KL 0 LN (LS + L2) LN
-KL-KR LS + L1 LN (LS + L2) LN
1) En la configuración nominal se guarda la longitud nominal. El controlador tiene en cuenta la prolongación automáticamente
cuando está activada la opción PNU 1104.1 (unidad de bloqueo integrada).
Tab. B.17 Cálculo de las posiciones finales por software y la longitud del cilindro (carrera de trabajo)

B Fundamentos del CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 219
B.3 Accionamientos y sistemas de medición
El CMAX admite las siguientes combinaciones de tipos de accionamiento y de sistemas de medición. La
selección de otra combinación en el FCT no es posible y causa un error en el CMAX.
Accionamientos autorizados � Descripción del sistema del CMAX.
También está permitido utilizar otros accionamientos definidos por el usuario tras
consultar con Festo.
Actuador lineal DGCI / DDLIParámetro PNU Valor
Sistema de medición de
recorrido
1110 Predeterminado: Sistema digital de medición de recorrido
Longitud del cilindro 1101 50 mm ... 2000 mm
Longitud cubierta por el
sistema de medición
1111 Predeterminado: Longitud del cilindro ±5 mm
Decalaje del punto cero del
eje
1130 Predeterminado: 0
Diámetros del cilindro 1102 Selección con DGCI: 18, 25, 32, 40, 63
Selección con DDLI: 25, 32, 40, 63
Definido por el usuario: 16 ... 125
Diámetro del vástago 1103 0
Cilindro normalizado DNCI / DDPCParámetro PNU Valor
Sistema de medición de
recorrido
1110 Predeterminado: Sistema de medición de recorrido
incremental
Longitud del cilindro 1101 50 mm ... 2000 mm
Longitud cubierta por el
sistema de medición
1111 Predeterminado: Longitud del cilindro ±5 mm
Decalaje del punto cero del
eje
1130 Variable dentro de la longitud del cilindro
Diámetros del cilindro 1102 Selección con DNCI: 32, 40, 50, 63
Selección con DDPC: 80, 100
Definido por el usuario: 16 ... 320
Diámetro del vástago 1103 Asignación1) con DNCI: 12, 16, 20, 20
Asignación1) con DDPC: 22.6, 22.6
Definido por el usuario: Menor que el diámetro del cilindro
1) Conforme al orden de los diámetros de cilindro

B Fundamentos del CMAX
220 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Actuador giratorio DSMIParámetro PNU Valor
Sistema de medición de
recorrido
1110 Predeterminado: Potenciómetro
Longitud del cilindro 1101 270° ... 275°
Longitud cubierta por el
sistema de medición
1111 285° ... 295°
Decalaje del punto cero del
eje
1130 Variable entre 5° y 15°
Diámetros del cilindro 1102 Selección: 25, 40, 631)
Diámetro del vástago 1103 0
1) En el CMAX, los accionamientos con otros diámetros causan un error.
Actuador lineal sin / con vástagoParámetro PNU Valor
Sistema de medición de
recorrido
1110 A elegir: 1. Potenciómetro
2. Sistema de medición de recorrido digital
Longitud del cilindro 1101 50 mm ... 2000 mm
Longitud cubierta por el
sistema de medición
1111 50 mm ... 10 000 mm
Decalaje del punto cero del
eje
1130 Dentro del margen máximo de desplazamiento1)
Diámetros del cilindro 1102 16 mm ... Ancho de 320 mm
Diámetro del vástago 1103 Actuador lineal sin vástago: 0
Actuador lineal con vástago: Menor que el diámetro del
cilindro
1) Margen de desplazamiento máx.: Carrera entre las posiciones finales por hardware. Las posiciones finales por hardware describen
la zona en la que se solapan el cilindro y el sistema de medición de recorrido, es decir, donde el émbolo realmente puede
moverse.

B Fundamentos del CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 221
B.4 Consideración de la masa de la carga
El controlador del CMAX necesita los datos más precisos posibles de las masas en movimiento para
realizar el control de posición y la regulación de fuerza de forma óptima. Para ello se utilizan unos
parámetros especiales (� Tab. B.18).
Parametrización de las masas
1
2
1 Carga básica (PNU 1142)Masa en movimiento incluidos el vástago, el pistón, el carro y los elementos instalados de
forma fija en el carro. Esta masa debe ser movida siempre por el accionamiento (masa mínima
a mover). La masa del vástago etc. se puede consultar en la información del catálogo
(� www.festo.com/sp).
2 Carga útil (PNU 605/410/536/544/551/1134 � Sección 5.3)Si el accionamiento debe mover otras piezas a mecanizar pesadas, esta parte variable debe
fijarse como carga útil.
El CMAX suma las dos indicaciones de masa para cada posicionamiento. Al indicar la carga útil
variable (PNU 605 es el valor predeterminado global) se determina respectivamente la masa
existente. No obstante, la carga útil también puede especificarse individualmente en cada
frase (PNU 410), en la actuación secuencial (PNU 536), en el modo directo (PNU 544 o 551) y
en el recorrido de referencia (PNU 1134).
– Carga útil cargada al conectar (PNU 1143:01)Al habilitar el controlador (accionamiento habilitado) se utiliza siempre la última carga útil
empleada. En el primer desbloqueo tras la conexión no suele haber una pieza a mecanizar
cargada, por ello el CMAX solo tiene en cuenta la masa básica (PNU 1142). Con este
parámetro se determina si la pieza a mecanizar también debe tenerse en cuenta al conectar.
0 = Pieza a mecanizar no cargada al conectar. La pieza a mecanizar se añade durante el
funcionamiento.
1 = La pieza a mecanizar ya se encuentra en el dispositivo de carga al conectar.
Tab. B.18 Parámetros de la masa de la carga
Observar la nota respecto a la carga de masa al abrir la unidad de bloqueo/freno
� Sección 3.1.7.
Ejemplo de aplicación � Sección 5.3.

B Fundamentos del CMAX
222 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
B.5 Optimización del controlador
NotaAntes de la optimización con ayuda de los datos del controlador de posición es
necesario comprobar la estructura mecánica � Descripción del sistema CMAX,
P.BE-CPX-CMAX-SYS-... .
A partir de la configuración del accionamiento y de los ajustes del usuario el CMAX determina los
parámetros internos del controlador para amplificación, amortiguación y factor de filtro. Dichos
parámetros condicionan la dinámica (rapidez) y los comportamientos de transición (amortiguación) de
la regulación. El objetivo es garantizar un posicionamiento rápido sin desbordamientos con escaso
error de seguimiento.
Los datos del controlador determinados por el CMAX ya suelen estar optimizados. Sin embargo, los
ejes neumáticos (reales) utilizados no siempre se corresponden con los ejes (ideales) establecidos
para la regulación. Introduciendo factores puede influirse en los parámetros de regulación para tener
en cuenta las desviaciones posibles.
Con los parámetros PNU 1150 ... 1152 (controlador de posición) y 1160 ... 1162 (controlador de fuerza)
es posible aumentar los parámetros internos (valores > 1) o reducirlos (valores < 1).
B.5.1 Factores del controlador para el control de posición
Factor de amplificación del controlador de posición: (PNU 1150)El factor de amplificación influye en la sensibilidad con la que el circuito de control de posición
reacciona a las modificaciones de las “Magnitudes medidas” (posición, velocidad, aceleración).
Comportamiento del eje Factor
El accionamiento tiende a la inestabilidad (tendencia a la oscilación
durante el desplazamiento o hasta oscilaciones continuas alrededor de la
posición nominal).
Reducir
Precisión de posicionamiento reducida o error de seguimiento elevado, así
como tiempo de posicionamiento prolongado.
Incrementar
El posicionamiento se ejecuta de manera rápida y precisa. Óptimo
Tab. B.19 Efecto del factor de amplificación del controlador de posición

B Fundamentos del CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 223
Factor de amortiguación del controlador de posición (PNU 1151)La amortiguación es una medida del comportamiento de transición del sistema del estado real al
nominal, en especial en caso de cambios rápidos de valores nominales. Por lo general, el sistema debe
garantizar un comportamiento con reducidas oscilaciones con los valores de referencia y un avance sin
desbordamientos a la posición de destino.
Al modificar el factor de la amortiguación se influye en el comportamiento de transición del sistema.
Comportamiento del eje Factor
Calidad de posicionamiento reducida, la posición nominal se alcanza solo
lentamente (undershoot).
Reducir
El actuador tiende a la inestabilidad (tendencia a la oscilación durante el
desplazamiento o hasta oscilaciones continuas alrededor de la posición
nominal, desbordamiento elevado).
Incrementar
El posicionamiento se ejecuta de manera rápida y precisa. Óptimo
Tab. B.20 Efecto del factor de amortiguación del controlador de posición
Factor de filtro del controlador de posición (PNU 1152)
La velocidad y la aceleración se derivan de la señal de recorrido y se filtran para mejorar la calidad de la
señal. Si, p. ej., la calidad de la señal es mala debido a interferencias eléctricas, puede influirse en la
filtración de la señal mediante el factor de filtro.
Una filtración elevada puede desestabilizar la regulación.
Comportamiento del eje Factor
El accionamiento tiende a la inestabilidad (a pesar de una amplificación
reducida y de una buena amortiguación).
Reducir
“Ruidos” o ruidos fuertes de la válvula (observar la amplificación, puede
que sea demasiado elevada).
Incrementar
El posicionamiento se ejecuta de manera rápida y precisa, la válvula casi no
emite ruidos.
Óptimo
Tab. B.21 Efecto del factor de filtro del controlador de posición

B Fundamentos del CMAX
224 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
B.5.2 Optimización del comportamiento de posicionamientoEn la identificación se optimiza automáticamente el comportamiento de posicionamiento. Si a
continuación la calidad del comportamiento de posicionado no se corresponde con los requisitos
deseados, proceder del modo siguiente:
– Comprobar la parametrización (FCT)
– Comprobar los ajustes del controlador
NotaUn parámetro incorrecto puede causar la destrucción del accionamiento.
� Proceder con mucho cuidado al ajustar los parámetros.
En caso de oscilaciones de presión de más de 1 bar delante de la válvula distribuidora
proporcional, instalar un acumulador de aire comprimido � Descripción del sistema
CMAX. ¡Observar las instrucciones generales de instalación!
Durante el posicionamiento pueden surgir los problemas típicos siguientes:
– Reposo anticipado frecuente del eje
– Oscilaciones alrededor de la posición nominal
– Problema de estabilidad, oscilación de frecuencia elevada alrededor de la posición nominal
– Overshoot (desbordamiento)
– Undershoot (posición no alcanzada)
Antes de optimizar el comportamiento de posicionamiento del eje:
� Comprobar que el eje neumático esté estructurado conforme a las directivas � Descripción del
sistema CMAX.
� Comprobar que los datos del eje y de la aplicación estén ajustados correctamente.
� Ejecutar siempre la identificación.
� A continuación ejecutar siempre varios ciclos de posicionamiento. De este modo se garantiza que la
adaptación tenga efecto.
Si aún así siguen surgiendo problemas:
1. Observar el comportamiento de posicionamiento. Utilizar el plugin FCT a tal fin. Con el plugin
pueden registrarse valores nominales y reales, por ejemplo para el recorrido, la velocidad y la
aceleración, y representarse de forma gráfica.
Información detallada � Ayuda del plugin CMAX.
2. Comparar el comportamiento de posicionamiento o la gráfica elaborada con el plugin con los
ejemplos presentados a continuación.
3. Optimizar el comportamiento de posicionamiento como se indica en la tabla del ejemplo
correspondiente. Comprobar primero de arriba a abajo las causas más probables y los remedios
para solucionarlas.

B Fundamentos del CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 225
Efecto Causa Remedio
Reposo anticipado frecuente
21 – Identificación no ejecutada � Ejecutar recorrido de
identificación
– Adaptación todavía no
terminada
� Dejar que se ejecuten algunos
ciclos de posicionamiento
(adaptación)
– Comportamiento de
operación deficiente del
cilindro/guía (stick-slip)
� Comprobar y, si es necesario,
realizar el mantenimiento o
cambiar el componente
– Carga incorrecta � Corregir la carga
Oscilaciones alrededor de la posición nominal con tiempos de paro
1 2 – Recorrido de identificación no
ejecutado
� Ejecutar recorrido de
identificación
– Carga configurada incorrecta � Corregir la configuración
– Elevado rendimiento del
cilindro (la fricción ha
cambiado)
� Ejecutar una nueva
identificación
– Factor de amplificación
ajustado demasiado bajo
� Corregir el parámetro
1 Posición nominal2 Posición realz
Efecto Causa Remedio
Problema de estabilidad, oscilación de frecuencia elevada alrededor de la posición nominal
1
3
2 – Carga configurada incorrecta � Corregir la configuración
– Factor de amplificación
ajustado demasiado alto
� Corregir el parámetro
– Factor de amortiguación
ajustado demasiado bajo
� Corregir el parámetro
– Factor de filtro ajustado
demasiado alto (señal lisa de
aceleración/velocidad, pero
oscilación continua)
� Reducir factor de filtro
– Señal de aceleración con
mucho ruido y de gran
amplitud
� Aumentar factor de filtro
– Carga mínima no alcanzada � Incrementar la carga básica
– Tolerancia demandada
demasiado baja
� Incrementar la tolerancia

B Fundamentos del CMAX
226 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Efecto RemedioCausa
– Resonancias mecánicas en la
máquina o en zonas de la
máquina en las que está
montado el eje
� Aumentar la estabilidad
mecánica. Reforzar las chapas
que tienden a vibrar.
� Reducir el factor de
amplificación y las rampas de
aceleración.1 Posición nominal2 Posición real3 Velocidad
Efecto Causa Remedio
Overshoot (no hay tiempo de paro o es mínimo antes del MC)
21 – Caída de la presión de
alimentación estática en
funcionamiento por debajo
del límite de tolerancia
admisible
� Estabilizar la presión de
alimentación o ejecutar un
nuevo recorrido de
identificación con una presión
de alimentación más reducida
– Carga demasiado elevada
(o carga configurada
demasiado baja)
� Corregir la carga
– Esfuerzo (aceleración nominal
demasiado alta)
� Reducir los valores nominales
(especialmente la
aceleración). Ejecutar un
recorrido de identificación
dinámico (limitación
automática) si es necesario
– Factor de filtro ajustado
demasiado alto
� Corregir el parámetro
– Factor de amplificación
ajustado demasiado alto
� Corregir el parámetro
– Factor de amortiguación
ajustado demasiado bajo
� Corregir el parámetro
Undershoot (no hay tiempo de paro o es mínimo antes del MC)

B Fundamentos del CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 227
Efecto RemedioCausa
1 2– Carga configurada demasiado
elevada (puede causar una
amortiguación excesiva del
controlador)
� Reducir la carga
– Esfuerzo (valores nominales
demasiado “rápidos”)
� Adaptar valores nominales,
ejecutar un recorrido de
identificación dinámico
(limitación automática) si es
necesario
1 Posición nominal2 Posición real
B Fundamentos del CMAX
228 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
B.5.3 Factores del controlador para la regulación de fuerza
Factor de amplificación del controlador de fuerza (PNU 1160)Con el factor de amplificación se aumenta o disminuye la amplificación del controlador.
– Con éste, el controlador reacciona más rápido o más despacio a desviaciones de regulación. El
tiempo que transcurre hasta alcanzar el valor final estático puede optimizarse.
– Con el factor de amplificación se influye en la precisión de la trayectoria en todo el comando de
fuerza.
– Si este factor se aumenta demasiado, la válvula empieza a emitir un zumbido. Este se aprecia sobre
todo con el valor nominal de fuerza estático y en la regulación de reposo.
Comportamiento del eje Factor
La fuerza se acumula con demasiada lentitud, la precisión estática se
alcanza de forma vacilante.
Incrementar
Al acumularse la fuerza se producen overshoots. La válvula tiende a emitir
un zumbido.
Reducir
El valor de fuerza sigue al valor nominal con desviaciones mínimas. Óptimo
Amplificación dinámica de controlador de fuerza (PNU 1161)La amplificación dinámica solo funciona en el margen de la rampa de fuerza, es decir, si el valor nominal
de la fuerza se modifica.
– Con ella puede influirse en la precisión de la trayectoria durante la rampa de fuerza.
– Su modificación no influye de ningún modo en la precisión estática.
Comportamiento del eje Factor
Al acumularse la fuerza, el valor efectivo no puede seguir al valor nominal. Incrementar
Al acumularse la fuerza, el valor efectivo se adelanta en fase al valor
nominal.
Reducir
La fuerza se acumula de manera rápida y precisa. Óptimo
Factor de filtro del controlador de fuerza (PNU 1162)Las señales derivadas (p. ej., la rampa de fuerza de la señal de presión) se filtran para mejorar la
calidad de señal.
– Una filtración demasiado elevada o demasiada bajo puede desestabilizar la regulación.
– Con el factor de filtro se influye en el ruido de la señal que emiten los sensores de presión y afectan
al valor de fuerza.
– Al aumentar el factor, el filtro es más rápido y, por tanto, el ruido es mayor. Al mismo tiempo, el
desfase es menor.
– El factor de filtro se reduce para suprimir el zumbido de la válvula. Ello puede ser necesario, por
ejemplo, cuando la exactitud de regulación solo puede alcanzarse incrementando el valor de
amplificación, circunstancia en la que la válvula tiende a emitir un zumbido.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 229
C Parámetro
C.1 Estructura general de parámetros del CMAX
Un CMAX contiene un juego de parámetros con la estructura indicada a continuación:
Grupo PNU Descripción Sección
Datos del equipo (no dependen del eje)Datos del equipo 100 ... 199 Identificación del dispositivo y ajustes específicos del
dispositivo, números de versión, palabras clave, etc.� C.2.2
Datos del eje
Diagnosis 200 ... 299 Memoria para eventos de diagnosis: Números deerror y de advertencia, registro de tiempo, mensajesactivos
� C.2.3
Datos de proceso 300 ... 399 Valores nominales y efectivos actuales, datos deestado
� C.2.4
Tabla de frases 400 ... 499 Para el modo de frase.Una frase contiene todos los valores nominales delos parámetros requeridos para un procedimiento deposicionamiento.
� C.2.5
Datos del proyecto 500 ... 529 Ajustes básicos del proyecto: Punto cero delproyecto, límites de los valores nominales paraposición, fuerza, velocidad, etc.
� C.2.6
Operación por actuación secuencial
530 ... 539 Datos para la actuación secuencial � C.2.7
Modo directo concontrol de posición
540 ... 549 Datos para el modo directo con control de posición � C.2.8
Modo directo concontrol de fuerza
550 ... 599 Datos para el modo directo con control de fuerza � C.2.9
Valores predeterminados globales
600 ... 699 Valores predeterminados globales, función descritaen � Sección 5.3.
� C.2.10
Configuración delaccionamiento
1100 ... 1129 Todos los parámetros específicos del eje paraactuadores neumáticos: longitud y diámetro delcilindro, tipo de válvula, etc.
� C.2.11
Ajustes de aplicación
1130 ... 1149 Parámetros específicos de la aplicación, punto cerodel eje, posición de montaje, etc.
� C.2.12
Controlador deposición
1150 ... 1159 Parámetros del controlador para el control deposición
� C.2.13
Controlador defuerza
1160 ... 1169 Parámetros del controlador para la regulación defuerza
� C.2.14
Identificación 1170 ... 1189 Identificación, adaptación � C.2.15
Datos del sistema 1190 ... 1199 Configuración actual, sistema de medición, reset dedatos, etc.
� C.2.16
Textos de error 2100 ... 2199 Textos de los errores y advertencias � C.2.17
Tab. C.1 Estructura de parámetros

C Parámetro
230 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Clases de parámetros Característica/utilización
Var Variable simple. Contiene sólo un valor.
El subíndice no tiene ninguna función.
Array Contiene diferentes variables simples que tienen el mismo significado, los
mismos valores límite, unidades iguales, etc.
Ejemplo: Tabla de frases posición nominal (PNU 404).
Los elementos de la matriz (array) se direccionan mediante el subíndice.
Struct (Record) Resumen de varias variables simples con diferentes valores límite, etc.
Tab. C.2 Clases de parámetros en el CMAX
Tipos de datos Característica/utilización
bitarray Valor de 4 bytes en el que cada bit individual tiene un significado por
separado
char Carácter ASCII de 8 bits como elemento de cadena1)
int32 Valor entero de 4 bytes provisto de signo
1) Nota sobre las cadenas de caracteres: El CMAX comprueba para todas las cadenas que un “char” no contenga caracteres de
control (valores 0x01 ... 0x1F). El plugin tiene reglas diferentes para los distintos objetos de las cadenas, que limitan aún más la
admisibilidad. Estas reglas se especifican en el PNU correspondiente. Las cadenas de caracteres terminan respectivamente con
0x00 (carácter ASCII cero).
Tab. C.3 Tipos de datos en el CMAX

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 231
C.2 Descripción de los parámetros
C.2.1 Cuadro general de parámetrosEl cuadro general de la Tab. C.5 muestra los parámetros del CMAX. Descripción de las columnas � Tab. C.4.
Descripción detallada de los parámetros � Secciones C.2.2 a C.2.16.
Índice Magnitud física
PNU Número decimal de parámetroInd. Subíndice (Array, Struct) decimal (X = Todos o varios subíndices del PNU)Máx Índice máx. o mayor = Tamaño de matriz/estructuraClase Clase de parámetro (Var, Array, Struct)Tipo Tipo de valor (int32, bitarray, char)Unidad Unidad física (� PNU 1193 y apéndice B.1)RW Acceso: R = Solo lectura, RW = Lectura y escritura, W = Solo escritura
Tab. C.4 Leyenda del cuadro general de parámetros del CMAX
PNU 1) Nombre (ES) Características 1)
PNU Ind. Máx Clase Tipo Unidad RW
Datos del equipo (� Sección C.2.2)100 1 1 Versión de hardware del
fabricanteVar int32 – R
101 1 1 Versión de firmware delfabricante
Var int32 – R
102 1 1 Versión de FHPP Var int32 – R
103 X 30 Fecha de creación Array char – R
104 X 2 Versiones de software Var int32 – R
105 1 1 Versión del cargador dearranque
Var int32 – R
107 1 1 Código de variante Var int32 – R
108 X 30 Nombre de variante Array char – R
109 1 1 Versión de firmware de pro
yecto
Var int32 – RW
114 1 1 Número de serie delcontrolador
Var bitarray – R
116 X 33 Identificación del proyecto FCT Array char – RW
120 X 30 Nombre del equipo delfabricante
Array char – R
121 X 30 Nombre del equipo del usuario Array char – RW
122 X 30 Nombre del fabricante Array char – R
123 X 30 Dirección HTTP del fabricante Array char – R
124 X 30 Número de artículo de Festo Array char – R
130 X 30 Palabra clave Array char – W
133 X 2 Palabra clave del sistema Var int32 – RW
1) � Tab. C.4

C Parámetro
232 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
PNU 1) Características 1)Nombre (ES)
PNU RWUnidadTipoClase
Nombre (ES)
MáxInd.
140 1 2 Tiempo del sistema: Indicacióndías de servicio
Struct int32 – R
140 2 2 Tiempo del sistema: ms del día Struct int32 – R
154 1 1 Idioma Var int32 – RW
155 1 1 Idiomas compatibles Var bitarray – R
180 X 30 Nombre del eje Array char – RW
Diagnosis (� Sección C.2.3)200 X 100 Evento de diagnosis Array int32 – R
201 X 100 Código de diagnosis Array int32 – R
202 X 100 Registro de tiempo hora del día Array int32 – R
203 X 100 Información adicional Array bitarray – R
204 1 5 Reservado Struct int32 – R
204 2 5 Reservado Struct int32 – R
204 3 5 Borrar la memoria Struct int32 – RW
204 4 5 Número de entradas Struct int32 – R
204 5 5 Número de entradas sin leer Struct int32 – RW
220 X 3 Mensajes de error activos Array bitarray – R
221 X 3 Mensajes de advertenciaactivos
Array bitarray – R
222 X 100 Registro de tiempo: Día deservicio
Array int32 – R
224 1 1 Pantalla de error visualizadaactualmente
Var int32 – R
225 1 1 Nivel activo Var int32 – R
226 1 1 Advertencia a visualizaractualmente en el FCT
Var int32 – R
227 X 89 Estado de error FCT Array bitarray – R
228 1 3 Filtro de eventos de diagnosis Struct bitarray – RW
228 2 3 Filtro de errores y advertencias Struct bitarray – RW
228 3 3 Configuración de reacción anteun error
Struct bitarray – RW
Datos de proceso (� Sección C.2.4)300 X 3 Valores de posición Array int32 Posición/ángulo R
301 X 3 Valores de fuerza Array int32 Fuerza R
302 X 3 Valores de presión Array int32 Presión R
305 1 4 Número de órdenes deposicionamiento
Struct int32 – R
305 2 4 Número de órdenes de fuerza Struct int32 – R
305 3 4 Suma de la carrera Struct int32 – R
305 4 4 Suma de la fracción de carrera Struct int32 – R
1) � Tab. C.4

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 233
PNU 1) Características 1)Nombre (ES)
PNU RWUnidadTipoClase
Nombre (ES)
MáxInd.
307 1 1 Velocidad actual Var int32 Velocidad/velocidad angular
R
308 1 1 Estado ampliado del eje Var bitarray – R
309 1 1 Valor regulado de la válvula Var int32 – R
Tabla de frases (� Sección C.2.5)400 1 3 Número de frase nominal Struct int32 – R
400 2 3 N.º de frase real Struct int32 – R
400 3 3 Byte de estado de frase Struct bitarray – R
401 X 128 Byte de control de frase 1 Array bitarray – RW
402 X 128 Byte de control de frase 2 Array bitarray – RW
403 X 128 Valores predeterminados defrase
Array bitarray – RW
404 X 128 Valor nominal de frase Array int32 Posición/ángulo, fuerza RW
405 X 128 Valor preseleccionado de frase Array int32 � Sección 3.3.3 RW
406 X 128 Velocidad de frase Array int32 Velocidad/velocidad angular
RW
407 X 128 Aceleración de frase Array int32 Aceleración/aceleración angular
RW
408 X 128 Deceleración de frase Array int32 Aceleración/aceleración angular
RW
410 X 128 Carga útil de frase Array int32 Masa/momento deinercia de la masa
RW
411 X 128 Tolerancia de frase Array int32 Posición/ángulo, fuerza RW
412 X 128 Rampa de fuerza de frase Array int32 Rampa de fuerza RW
Datos del proyecto (� Sección C.2.6)500 1 1 Decalaje del punto cero del
proyecto:Var int32 Posición/ángulo RW
501 1 2 Posición final inferior porsoftware
Var int32 Posición/ángulo RW
501 2 2 Posición final superior porsoftware
Var int32 Longitud/ángulo derotación
RW
507 1 1 Deceleración de parada Var int32 Aceleración/aceleración angular
RW
510 1 1 Carrera permitida conregulación de fuerza
Var int32 Posición/ángulo RW
511 1 1 Valor nominal de fuerza mín.admisible
Var int32 Fuerza RW
512 1 1 Valor nominal de fuerza máx.admisible
Var int32 Fuerza RW
514 1 1 Vel. perm. con regulaciónfuerza
Var int32 Velocidad/velocidad angular
RW
1) � Tab. C.4

C Parámetro
234 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
PNU 1) Características 1)Nombre (ES)
PNU RWUnidadTipoClase
Nombre (ES)
MáxInd.
521 1 4 Valores predet. actuaciónsecuencial
Array bitarray – RW
521 2 4 Valores predet. posición Array bitarray – RW
521 3 4 Valores predet. fuerza Array bitarray – RW
521 4 4 Valores predeterminadosrecorrido de referencia
Array bitarray – RW
522 1 2 Reservado Struct int32 – RW
522 2 2 FHPP: Bits control/estado: Nivel CCON.BRAKE
Struct int32 – RW
523 X 8 FHPP: Valoresnominales/efectivos
Struct int32 – RW
Operación por actuación secuencial (� Sección C.2.7)530 1 1 Velocidad lenta operación por
actuación secuencialVar int32 Velocidad/
velocidad angularRW
531 1 1 Velocidad máxima operaciónpor actuación secuencial
Var int32 Velocidad/velocidad angular
RW
532 1 1 Aceleración operación poractuación secuencial
Var int32 Aceleración/aceleración angular
RW
533 1 1 Deceleración operación poractuación secuencial
Var int32 Aceleración/aceleración angular
RW
534 1 1 Duración marcha lentaoperación por actuaciónsecuencial
Var int32 Tiempo RW
536 1 1 Carga útil operación poractuación secuencial
Var int32 Masa/momento deinercia de la masa
RW
Modo directo posición (� Sección C.2.8)540 1 1 Velocidad modo directo
posiciónVar int32 Velocidad/
velocidad angularRW
541 1 1 Aceleración modo directoposición
Var int32 Aceleración/aceleración angular
RW
542 1 1 Deceleración modo directoposición
Var int32 Aceleración/aceleración angular
RW
544 1 1 Carga útil modo directoposición
Var int32 Masa/momento deinercia de la masa
RW
545 1 1 Tolerancia modo directoposición
Var int32 Posición/ángulo RW
Modo directo fuerza (� Sección C.2.9)550 1 1 Rampa de fuerza modo directo
fuerzaVar int32 Rampa de fuerza RW
551 1 1 Carga útil modo directo fuerza Var int32 Masa RW
552 1 1 Tolerancia de fuerza mododirecto fuerza
Var int32 Fuerza RW
1) � Tab. C.4

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 235
PNU 1) Características 1)Nombre (ES)
PNU RWUnidadTipoClase
Nombre (ES)
MáxInd.
554 1 1 Limitación velocidad de parmodo directo fuerza
Var int32 Velocidad RW
Valores predeterminados globales (� Sección C.2.10)600 1 1 Valor predeterminado velocidad
en control de posiciónVar int32 Velocidad/
velocidad angularRW
601 1 1 Valor predeterminado velocidaden regulación de fuerza
Var int32 Velocidad RW
602 1 1 Valor predeterminadoaceleración
Var int32 Aceleración/aceleración angular
RW
603 1 1 Valor predeterminadodeceleración
Var int32 Aceleración/aceleración angular
RW
605 1 1 Valor predeterminado carga útil Var int32 Masa/momento deinercia de la masa
RW
606 1 1 Valor predeterminadotolerancia de posición
Var int32 Posición/ángulo RW
607 1 1 Valor predeterminadotolerancia de fuerza
Var int32 Fuerza RW
608 1 1 Valor predeterminado rampa defuerza
Var int32 Rampa de fuerza RW
Configuración del accionamiento (� Sección C.2.11)1100 1 1 Cilindro Var int32 – RW
1101 1 1 Longitud del cilindro Var int32 Longitud/ángulo derotación
RW
1102 1 1 Diámetro de cilindro Var int32 Diámetro RW
1103 1 1 Diámetro del vástago Var int32 Diámetro RW
1104 1 6 DGCI: Unidad de bloqueointegrada
Struct int32 – RW
1104 2 6 DGCI: Carro adicional Struct int32 – RW
1104 3 6 DGCI: Función de lubricación Struct int32 – RW
1104 4 6 DGCI: Carro Struct int32 – RW
1104 5 6 DGCI: Distancia entre carro ycarro adicional KR
Struct int32 Longitud/ángulo derotación
RW
1104 6 6 DGCI: DGCI: Distancia entrecarro y carro adicional KL
Struct int32 Longitud/ángulo derotación
RW
1110 1 1 Tipo de sistema de medición derecorrido
Var int32 – RW
1111 1 1 Longitud del sistema demedición de recorrido
Var int32 Longitud/ángulo derotación
RW
1112 1 1 N.º de serie sistema demedición de recorrido
Var bitarray – RW
1120 1 1 Válvula Var int32 – RW
1121 1 1 N.º de serie de válvula Var bitarray – RW
1) � Tab. C.4

C Parámetro
236 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
PNU 1) Características 1)Nombre (ES)
PNU RWUnidadTipoClase
Nombre (ES)
MáxInd.
1125 1 1 Válvula 2 Var int32 – RW
1126 1 1 N.º de serie de válvula 2 Var bitarray – RW
Ajustes de aplicación (� Sección C.2.12)1130 1 1 Decalaje del punto cero del eje Var int32 Posición/ángulo RW
1131 1 1 Método de recorrido dereferencia
Var int32 – RW
1132 1 1 Velocidad de recorrido dereferencia
Var int32 Velocidad/velocidad angular
RW
1133 1 1 Timeout de recorrido dereferencia
Var int32 Tiempo RW
1134 1 1 Carga útil de recorrido dereferencia
Var int32 Masa/momento deinercia de la masa
RW
1140 1 1 Posición de montaje Var int32 Ángulo de montaje RW
1141 1 1 Presión de alimentación Var int32 Presión RW
1142 1 1 Carga básica Var int32 Masa/momento deinercia de la masa
RW
1143 1 4 Carga útil cargada al conectar Var int32 – RW
1143 2 4 Diseño de eje doble Var int32 – RW
1143 3 4 Unidad de bloqueo existente Var int32 – RW
1143 4 4 Vástago doble Var int32 – RW
1144 1 1 Retardo de respuesta E50 Var int32 – RW
1145 1 1 Bit de vida tiempo de intervalo Var int32 Tiempo RW
Controlador de posición (� Sección C.2.13)1150 1 1 Factor amplificación pos. Var int32 Factor de regulación RW
1151 1 1 Factor de amortiguación pos. Var int32 Factor de regulación RW
1152 1 1 Factor filtro controlador pos. Var int32 Factor de regulación RW
1153 1 1 Timeout pos. Var int32 Tiempo RW
1154 1 1 Tiempo supervisión paradaprecisa pos.
Var int32 Tiempo RW
1155 1 1 Desactivar regulación dereposo
Var in32 – RW
Controlador de fuerza (� Sección C.2.14)1160 1 1 Factor de amplificación fuerza Var int32 Factor de regulación RW
1161 1 1 Amplificación dinámica fuerza Var int32 Factor de regulación RW
1162 1 1 Factor de filtro fuerza Var int32 Factor de regulación RW
1163 1 1 Timeout fuerza Var int32 Tiempo RW
1164 1 1 Tiempo supervisión paradaprecisa fuerza
Var int32 Tiempo RW
Identificación (� Sección C.2.15)1170 1 1 Ajustes de identificación Var in32 – RW
1171 1 1 Estado de identificación Var bitarray – R
1) � Tab. C.4

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 237
PNU 1) Características 1)Nombre (ES)
PNU RWUnidadTipoClase
Nombre (ES)
MáxInd.
1172 X 6 Valores máximos identificados Struct int32 Velocidad/velocidad angular,aceleración/aceleración angular
R
1173 1 14 Valores de limitación: Estado Struct bitarray – RW
1173 X 14 Valores de limitación Struct int32 � Sección 3.1.10 R
1174 1 1 Estado de la prueba demovimiento
Var bitarray – R
1175 1 1 Bloquear adaptación Var int32 – RW
1176 X 16 Decalaje y valores de histéresisdel accionamiento
Array int32 – R
Datos del sistema (� Sección C.2.16)1190 X 43 Configuración actual de
hardwareStruct int32/
bitarray– R
1191 X 15 Datos de análisis Array int32 – R
1192 1 7 Función de puesta a puntodescarga de bloques de datos
Struct int32 – RW
1192 2 7 Función de puesta a puntoestado de configuración
Struct int32 – R
1192 3 7 Función de puesta a punto.Restablecimiento de los datos
Struct int32 – RW
1192 4 7 Función de puesta a punto.Estado de palabra clave
Struct int32 – RW
1192 5 7 Función de puesta a puntosistema de medida
Struct int32 – RW
1192 6 7 Función de puesta a puntotabla de sistema de medida
Struct int32 – R
1192 7 7 Función de puesta a puntoprueba de movimiento
Struct int32 – RW
1193 X 12 Unidad de sistema de medida Struct int32 – R
1194 X 12 Resolución sistema de medida Struct int32 – R
1195 X 5 Configuración de inicio Struct int32 – R
1198 1 1 Configuración Trace: Versiónmáxima compatible
Struct int32 – R
1199 X 7 Parámetro de fabricación Array int32 – R
Textos de error (� Sección C.2.17)2100 ...2189
X 81 Textos de error Array char – R
1) � Tab. C.4
Tab. C.5 Cuadro general de parámetros del CMAX

C Parámetro
238 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Representación de las entradas de parámetros
Posición final por software (Limit setpoint position)
Parám. PNU: 501 Índice: 1 Índice máx.: 2 Clase: Var Tipo de datos: int32Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,01 mm 0 0 1�000�000 0,1° 0 0 100�000Imperial 0,001 in 0 0 393�701 0,1° 0 0 100�000Margen admisible para valores nominales de posición. No está permitido arrancar con una posición de destinofuera de las posiciones finales por software ya que ello produce un error o una advertencia. Si se avanza másallá de las posiciones finales por software, se emite una advertencia. Se especifica el decalaje del punto cerodel eje (no del punto cero del proyecto). Indicar 0 en las dos posiciones finales por software desactiva lasposiciones finales por software.Índice 1 Posición final inferior por softwareÍndice 2 Posición final superior por softwareEl controlador comprueba la plausibilidad de las posiciones finales por software y en caso de desviacióngenera un error.� El valor de parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
1 Nombre del parámetro (inglés entre paréntesis)2 PNU (número de parámetro) con índice, índice máximo del PNU, clase y tipo de dato3 Valores del parámetro:
– Para parámetros enteros (int32) se especifica el margen de valores (valor predeterminado,
mínimo, máximo), para parámetros enteros con unidad física se introduce respectivamente
para cada sistema de medida (� Apéndice B.1, Definición del sistema de medida utilizado).
– En campos de bits (bitarray) se especifica el valor predeterminado de bit en bit. Además, se
introducen los bits que pueden aceptar los valores 0, 1 o x (cualquiera) al escribir. En los
campos de bits, el CMAX comprueba el estado de los bits individuales y no un margen de
valores.
– Las cadenas de caracteres (char) se introducen con sus valores predeterminados y los signos
admisibles durante la escritura.
4 Descripción del parámetro si está disponible para los subíndices individuales5 Información sobre las restricciones de acceso y su repercusión en el controlador
Fig. C.1 Representación de las entradas de parámetros
1
2
3
4
5

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 239
C.2.2 Datos del equipo
Versión de hardware del fabricante (Manufacturer hardware version)
Parám. PNU: 100 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos:int32
Valores Valor predeterminado:0x0100
Mínimo: - Máximo: -
Código de la versión de hardware del CMAX.
El número de versión está codificado mediante código BCD, los 16 bits superiores no se utilizan.Formato: 0x0000HHNN (HH = Versión principal, NN = Versión secundaria)
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Versión de firmware del fabricante (Manufacturer firmware version)
Parám. PNU: 101 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos:int32
Valores Valor predeterminado:0x0100
Mínimo: - Máximo: -
Codificación de la versión del firmware del CMAX. El número de versión está codificado mediantecódigo BCD.Formato: 0xPPBBHHNN (PP = Versión Patch, BB = Número de versión/edición, HH = Versión principal, NN = Versión secundaria)Ejemplo: 0x05370201 corresponde a la versión V2.1.5.37
Nota sobre la compatibilidad: En las versiones del firmware < 2.2 el PNU está codificado de lasiguiente manera:Formato: 0xBBBBHHNN (BBBB = Número de versión/edición, HH = Versión principal, NN = Versiónsecundaria). Ejemplo: 0x01230102 corresponde a la versión V1.2.123� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Versión de FHPP (Version FHPP)
Parám. PNU: 102 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos:int32
Valores Valor predeterminado:0x0110
Mínimo: - Máximo: -
Código de la versión implementada del FHPP.La versión FHPP se modifica en caso de adaptaciones básicas de la definición de FHPP.Formato: 0x0000HHNN (HH = Versión principal, NN = Versión secundaria)
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
240 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Fecha de creación (Build date)
Parám. PNU: 103 Índice: 1 ... 30 Índice máx.: 30 Clase: Array Tipo de datos: char
Valores Valor predeterminado: -
Caracteres permitidos: 0x00, 0x20...0xFF (cero, caracteres ASCII imprimibles/ampliados)
Fecha de creación del firmware. La fecha está implementada como cadena de caracteres.Formato “DD.MM.YYYY hh:mm:ss”Ejemplo: 03.07.2008 12:40:44
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Versiones de software (Software versions)
Parám. PNU: 104 Índice: 1 ... 2 Índice máx.: 2 Clase: Var Tipo de datos: int32
Valores Valor predeterminado:0x0100
Mínimo: - Máximo: -
Versiones de software del plugin para controlar el firmware.
Índice Contiene
1 Versión mínima
2 Versión recomendada
Formato (BCD): 0000HHNN (HH = Versión principal, NN = Versión secundaria)� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Versión del cargador de arranque (Bootloader version)
Parám. PNU: 105 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Valor predeterminado: 0x0100 Mínimo: - Máximo: -
Versión del cargador de arranque instalado.El cargador de arranque no se sobrescribe al actualizar el firmware. Antes de descargar el firmwarese comprueba si el firmware que se va a escribir es compatible con el cargador de arranque.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Código de variante (Variant code)
Parám. PNU: 107 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Valor predeterminado: 0x0001 Mínimo: - Máximo: -
Identificación para variantes específicas del cliente.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 241
Nombre de variante (Variant name)
Parám. PNU: 108 Índice: 1 ... 30 Índice máx.: 30 Clase: Array Tipo de datos: char
Valores Valor predeterminado: “Firmware estándar”
Caracteres permitidos: 0x00, 0x20...0xFF (cero, caracteres ASCII imprimibles/
ampliados)Nombre o descripción de una variantes de firmware específica del cliente.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Versión de firmware proyecto (Project firmware version)
Parám. PNU: 109 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos:
int32
Valores Valor predeterminado: 0x0 Mínimo: 0x0 Máximo: 0x79999999
En este parámetro el software de dimensionado puede definir la versión de firmware que tenga que
utilizarse en el proyecto.
Solo se podrá descargar el proyecto cuando el firmware instalado en el controlador corresponda al
firmware planificado. La comprobación la realiza el software de dimensionado, no el CMAX. El
número de versión está codificado como BCD.
Formato: 0xPPBBHHNN
(PP = Versión Patch, BB = Número de versión/edición, HH = Versión principal, NN = Versión secun
daria)
Ejemplo: 0x05370201 corresponde a la versión V2.1.5.37
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Número de serie del controlador (Controller serial number)
Parám. PNU: 114 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos:
bitarray
Valores Valor
predeterminado:
-
Escritura: -
Número de serie del CMAX (número de serie del módulo CPX).
8 cifras. Ejemplo: 37 12 34 56
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
242 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Identificación del proyecto FCT (FCT project identifier)
Parám. PNU: 116 Índice: 1 ... 33 Índice máx.: 33 Clase: Array Tipo de datos: char
Valores Valor predeterminado: “0”
Caracteres permitidos: 0x30 ... 0x39, 0x41 ... 0x46 (“0” ... “9”, “A” ... “F”)Valor de reset: 0x00
UUID (Universally Unique Identifier) para identificar el proyecto del FCT.
El FCT genera un UUID después de descargar un proyecto y lo escribe como último parámetro en el
equipo. El UUID se guarda en el proyecto (no visible). En el CMAX, el UUID se repone a 0 en cuanto
se modifica un parámetro cualquiera en el margen de configuración (PNU =400). La modificación de
los datos de proceso y de diagnosis no causa la reposición.
La próxima vez que el FCT vuelve a conectarse con el equipo, lo comprueba con el nombre del UUID.
Si el nombre coincide con el UUID del proyecto, no es necesario ajustar el equipo con el proyecto.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Nombre del equipo del fabricante (Manufacturer device name)
Parám. PNU: 120 Índice: 1 ... 30 Índice máx.: 30 Clase: Array Tipo de datos: char
Valores Valor predeterminado: CPX-CMAX-C1-1
Caracteres permitidos: 0x00, 0x20...0x7F (NUL, caracteres ASCII imprimibles)Denominación del CMAX (tipo). Los caracteres que no se usan se rellenan con 0x00 (NUL).
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Nombre del equipo del usuario (User device name)
Parám. PNU: 121 Índice: 1 ... 30 Índice máx.: 30 Clase: Array Tipo de datos: char
Valores Valor predeterminado: CMAX0001
Caracteres permitidos: 0x00, 0x20...0x7F (NUL, caracteres ASCII imprimibles)Caracteres inadmisiblesplugin:
? @ . , ! : “ § | $ % & / \ # ‘ ’ + ~ * ’ ; ^ < >
Nombre del CMAX asignado por el usuario. El nombre sirve para la identificación con el FCT; éste lacomprueba al establecer la conexión del equipo.Ejemplo: “CMAX1_posición enchufe3”. Los caracteres que no se usan se rellenan con 0x00 (NUL).En el CMAX se indica un nombre de eje (PNU 180 ss) además del nombre del equipo.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 243
Nombre del fabricante (Drive manufacturer)
Parám. PNU: 122 Índice: 1 ... 30 Índice máx.: 30 Clase: Array Tipo de datos: char
Valores Valor predeterminado: Festo SE & Co. KG
Caracteres permitidos: 0x00, 0x20...0x7F (NUL, caracteres ASCII imprimibles)Nombre del fabricante del controlador. Los caracteres que no se usan se rellenan con 0x00 (NUL).
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Dirección HTTP del fabricante (HTTP drive catalog address)
Parám. PNU: 123 Índice: 1 ... 30 Índice máx.: 30 Clase: Array Tipo de datos: char
Valores Valor predeterminado: www.festo.com
Caracteres permitidos: 0x00, 0x20...0x7F (NUL, caracteres ASCII imprimibles)Dirección de Internet del fabricante. Los caracteres que no se usan se rellenan con 0x00 (NUL).
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Número de artículo Festo (Festo order number)
Parám. PNU: 124 Índice: 1 ... 30 Índice máx.: 30 Clase: Array Tipo de datos: char
Valores Valor predeterminado: “548932”
Caracteres permitidos: 0x00, 0x30...0x39 (NUL, cifras)Caracteres inadmisibles: -
Número de artículo de Festo. Con este número puede solicitarse un equipo idéntico. Los caracteres que no se usan se rellenan con ceros (=00h =’\0’).
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Palabra clave (Password)
Parám. PNU: 130 Índice: 1 ... 30 Índice máx.: 30 Clase: Array Tipo de datos: char
Valores Valor predeterminado: “” (secuencia vacía de caracteres)
Caracteres permitidos: 0x00, 0x21...0x7F (NUL, caracteres ASCII imprimibles sinespacios en blanco)
Caracteres inadmisiblesplugin:
? @ . , ! : “ § | $ % & / \ # ‘ ’ + ~ * ’ ; ^ < >
Palabra clave para controlar el CMAX a través de la interface del PC.En estado de entrega no hay ninguna palabra clave memorizada en el equipo (� Sección 5.2.1).
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
244 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Palabra clave del sistema (System password)
Parám. PNU: 133 Índice: 1 ... 2 Índice máx.: 2 Clase: Var Tipo de datos: int32
Palabra clave interna para producción y pruebas del sistema.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Tiempo del sistema: Cantidad de días de servicio (System time: count operating days)
Parám. PNU: 140 Índice: 1 Índice máx.: 2 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: - Mínimo: - Máximo: -
Número de días de servicio desde el estado nuevo, desde el restablecimiento de los datos del equipoo desde una descarga de firmware.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Tiempo del sistema: milisegundos del día (System time: milliseconds of the day)
Parám. PNU: 140 Índice: 2 Índice máx.: 2 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: - Mínimo: - Máximo: -
Número de milisegundos del día de servicio actual (PNU 140:01).Al conectar se carga el último valor registrado antes de la desconexión.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
El PNU 140 no proporciona datos de tiempo real. El CMAX cuenta el número de los días
de servicio, lo guarda al desconectar y vuelve a cargarlo al conectar. 1 día de servicio se
compone de: 24 * 60 * 60 * 1000 ms = 86�400�000 ms
Idioma (Language)
Parám. PNU: 154 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 1
Selección del idioma en que se transmiten los valores específicos de parámetros etc. desde el CMAX,p. ej. los textos de error en los PNU 2100 a 2189.
Valor Idioma
0 Inglés
1 Alemán� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 245
Idiomas disponibles (Supported languages)
Parám. PNU: 155 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos:bitarray
Valores Valorpredeterminado:
0000 0000 0000 0000 0000 0000 0000 0011
Escritura: -
Lectura de los idiomas disponibles para la transmisión de valores específicos de parámetros.
Bit Idioma
0 Inglés
1 Alemán
2 Español
3 Francés
4 Italiano
5 ... 32 Reservado para ampliaciones� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Nombre del eje (Axis name)
Parám. PNU: 180 Índice: 1 ... 30 Índice máx.: 30 Clase: Array Tipo de datos: char
Valores Valor predeterminado: Axis X
Caracteres permitidos: 0x00, 0x20...0xFF (NUL, caracteres ASCII imprimibles/ampliados)
Caracteres inadmisiblesplugin:
< > \ DEL (0x3C, 0x3E, 0x5C, 0x7F)
Nombre del eje/accionamiento en la conexión de eje X.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
246 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
C.2.3 Diagnosis
La memoria de diagnosis y los parámetros de diagnosis se describen detalladamente en
las secciones 4.3 y 4.3.
Evento de diagnosis (Diagnostic event)
Parám. PNU: 200 Índice: 1 ... 100 Índice máx.: 100 Clase: Array Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: - Máximo: -
Tipo de mensaje de diagnosis (� Sección 4.3.2).
En la memoria de diagnosis del CMAX no solo se registran errores y advertencias, sino también
procesos de conexión, resets o eventos de configuración. La interpretación del código de diagnosis y
de la información adicional depende de los tipos de evento.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Código de diagnosis (Diagnostic code)
Parám. PNU: 201 Índice: 1 ... 100 Índice máx.: 100 Clase: Array Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: - Máximo: -
El código de diagnosis contiene un dato detallado acerca del evento de diagnosis. En caso de errores
y advertencias se trata del número exacto, en eventos de configuración se trata de la función
ejecutada, etc. � Sección 4.3.2.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Registro de tiempo hora del día (Time stamp: time of day)
Parám. PNU: 202 Índice: 1 ... 100 Índice máx.: 100 Clase: Array Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: - Máximo: -
Hora del día de servicio actual en milisegundos cuando aparece el mensaje.
Este registro de tiempo no es una hora real. La hora se lee en los datos del equipo PNU 140:02 al
generarse el mensaje.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 247
Información adicional (Additional information)
Parám. PNU: 203 Índice: 1 ... 100 Índice máx.: 100 Clase: Array Tipo de datos: bitar
ray
Valores Valor
predeterminado:
0000 0000 0000 0000 0000 0000 0000 0000
Escritura: -
El parámetro contiene información detallada acerca del evento de diagnosis / la entrada en la memoria
de diagnosis. Esta información sirve, sobre todo, para facilitar la diagnosis con el FCT. La evaluación es
compleja y, por ello, no apropiada para un programa de control. Descripción (� Sección 4.3).
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Reservado (Reserved)
Parám. PNU: 204 Índice: 1 Índice máx.: 5 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 1 Mínimo: - Máximo: -
Reservado. El CMAX no lo utiliza.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Reservado (Reserved)
Parám. PNU: 204 Índice: 2 Índice máx.: 5 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 2 Mínimo: - Máximo: -
Reservado. El CMAX no lo utiliza.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Borrar la memoria (Clear memory)
Parám. PNU: 204 Índice: 3 Índice máx.: 5 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 1
Escritura de 1: Se borra la memoria de diagnosis completa. Al leer se obtiene siempre el valor 0.
Normalmente no es necesario borrar, porque la memoria está organizada en forma de memoria
intermedia circular. Cuando se llena, la entrada más reciente sobrescribe la más antigua.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
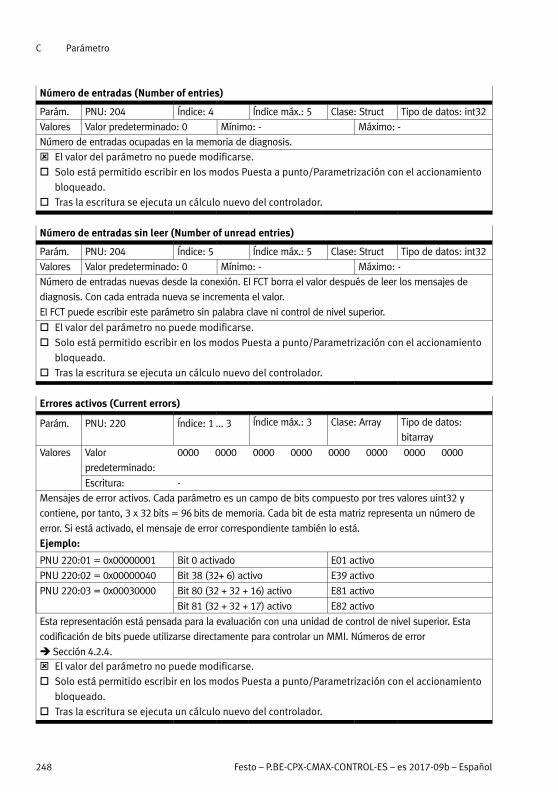
C Parámetro
248 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Número de entradas (Number of entries)
Parám. PNU: 204 Índice: 4 Índice máx.: 5 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: - Máximo: -
Número de entradas ocupadas en la memoria de diagnosis.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Número de entradas sin leer (Number of unread entries)
Parám. PNU: 204 Índice: 5 Índice máx.: 5 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: - Máximo: -
Número de entradas nuevas desde la conexión. El FCT borra el valor después de leer los mensajes de
diagnosis. Con cada entrada nueva se incrementa el valor.
El FCT puede escribir este parámetro sin palabra clave ni control de nivel superior.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Errores activos (Current errors)
Parám. PNU: 220 Índice: 1 ... 3 Índice máx.: 3 Clase: Array Tipo de datos:
bitarray
Valores Valor
predeterminado:
0000 0000 0000 0000 0000 0000 0000 0000
Escritura: -
Mensajes de error activos. Cada parámetro es un campo de bits compuesto por tres valores uint32 y
contiene, por tanto, 3 x 32 bits = 96 bits de memoria. Cada bit de esta matriz representa un número de
error. Si está activado, el mensaje de error correspondiente también lo está.
Ejemplo:
PNU 220:01 = 0x00000001 Bit 0 activado E01 activo
PNU 220:02 = 0x00000040 Bit 38 (32+ 6) activo E39 activo
PNU 220:03 = 0x00030000 Bit 80 (32 + 32 + 16) activo E81 activo
Bit 81 (32 + 32 + 17) activo E82 activo
Esta representación está pensada para la evaluación con una unidad de control de nivel superior. Esta
codificación de bits puede utilizarse directamente para controlar un MMI. Números de error
� Sección 4.2.4.� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 249
Advertencias activas (Current warnings)
Parám. PNU: 221 Índice: 1 ... 3 Índice máx.: 3 Clase: Array Tipo de datos:
bitarray
Valores Valor
predeterminado:
0000 0000 0000 0000 0000 0000 0000 0000
Escritura: -
Mensajes de advertencia activos, comparar mensajes de error activos PNU 220. La distinción entre
los dos permite a la unidad de control de nivel superior reaccionar de una manera específica ante
errores y advertencias.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Registro de tiempo: Día de servicio (Time stamp: day of operation)
Parám. PNU: 222 Índice: 1 ... 100 Índice máx.: 100 Clase: Array Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: - Máximo: -
Día de servicio actual (desde el estado nuevo, desde el restablecimiento de los datos del equipo o
desde una descarga de firmware) cuando aparece el mensaje.
Este registro de tiempo no es una hora real. La hora se lee en los datos del equipo PNU 140:01 al
generarse el mensaje.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Errores visualizados actualmente en la pantalla (Current error on display)
Parám. PNU: 224 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: - Máximo: -
Número de error que se visualiza actualmente en la pantalla. Este permite comparar la indicación del
FCT con la del CMAX. Se visualiza siempre el primer error que se ha producido.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
250 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Nivel de fallo activo (Current error level)
Parám. PNU: 225 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: - Máximo: -
Con él, el FCT visualiza el estado actual del CMAX como se indica en la sección 4.2.1. El nivel actual
depende siempre del evento más grave actual indicado.
Valor Nivel Significado
0 – –
2 W Advertencia
5 F1 Error 1
6 F2 Error 2
15 FS Error del sistema� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Advertencia a visualizar actualmente en el FCT (Current warning to display in FCT)
Parám. PNU: 226 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: - Máximo: -
El PNU 226 contiene el número de advertencia que debe visualizar el FCT. Las advertencias no se
visualizan en el display del CMAX.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Estado de error para FCT (Error status for FCT)
Parám. PNU: 227 Índice: 1 ... 89 Índice máx.: 89 Clase: Array Tipo de datos:
bitarray
Valores Valor
predeterminado:
0000 0000 0000 0000 0000 0000 0000 0000
Escritura: -
El estado de error codificado en bits permite visualizar exactamente el estado de un mensaje. La
codificación es idéntica a la de la información adicional PNU 203. Descripción � Sección 4.3.3.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 251
Filtro de eventos de diagnosis (Filter diagnostic events)
Parám. PNU: 228 Índice: 1 Índice máx.: 3 Clase: Struct Tipo de datos:
bitarray
Valores Valor
predeterminado:
0000 0000 0000 0000 0000 0000 0000 1111
Escritura: 0000 0000 0000 0000 0000 0000 0000 xxxx
Con estos ajustes puede determinarse el volumen de registros. De modo estándar, el CMAX registra gran
cantidad de información. No toda tiene la misma importancia. Cierta información puede seleccionarse
para excluirse del registro en la memoria. Así, la memoria de diagnosis contiene solo los eventos más
importantes. Asignación � Sección 4.4.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Filtro de errores y advertencias (Filter errors ans warnings)
Parám. PNU: 228 Índice: 2 Índice máx.: 3 Clase: Struct Tipo de datos:
bitarray
Valores Valor
predeterminado:
0000 0000 0000 0000 0000 0000 0111 1111
Escritura: 0000 0000 0000 0000 0000 0000 0xxx xxxx
Con el filtro pueden seleccionarse errores y advertencias determinados para excluirlos del registro en la
memoria de diagnosis. Esto es apropiado para mensajes que se consideran normales dentro del ciclo de
proceso, porque forman parte de él (fallos de tensión de la carga) o porque se producen con frecuencia
debido a otras razones. Asignación � Sección 4.4.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Ajuste de reacción ante un error (Error behaviour configuration)
Parám. PNU: 228 Índice: 3 Índice máx.: 3 Clase: Struct Tipo de datos:
bitarray
Valores Valor predeter
minado:
0000 0000 0000 0000 0000 0000 1100 0000
Escritura: 0000 0000 0000 0000 0000 000x xxxx xxxx
Algunos errores también pueden indicarse como advertencias. Esto ocurre sobre todo durante los
controles de las funciones, como el mantenimiento de las posiciones finales por software. En estos
casos, la reacción correcta depende a menudo de la aplicación. Asignación � Sección 4.4.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
252 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
C.2.4 Datos de proceso
Valores de posición (Position values)
Parám. PNU: 300 Índice: 1 ... 3 Índice máx.: 3 Clase: Array Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,01 mm - -1�000�000 1�000�000 0,1 - -100�000 100�000
Imperial 0,001 in - -393�701 393�701 0,1 - -100�000 100�000
Índice Valor
1 Posición real actual del controlador
2 Posición nominal actual del controlador
3 Desviación actual de regulación
Si la regulación de fuerza está activa, la posición nominal actual sigue a la posición real.� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Valores de fuerza (Force values)
Parám. PNU: 301 Índice: 1 ... 3 Índice máx.: 3 Clase: Array Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 1 N - -1�000�000 1�000�000 1 Nm - -1�000�000 1�000�000
Imperial 1 lbf - -224�809 224�809 1 lbf ft - -737�561 737�561
Índice Valor
1 Fuerza real actual del controlador
2 Fuerza nominal actual del controlador
3 Desviación actual de regulación
Si el control de posición está activo, la fuerza nominal actual = 0.� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 253
Valores de presión (Pressure values)
Parám. PNU: 302 Índice: 1 ... 3 Índice máx.: 3 Clase: Array Tipo de datos: int32Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,1 bar - -120 120 0,1 bar - -120 120Imperial 1 psi - -174 174 1 psi - -174 174Índice Valor1 Presión en la cámara de válvula 12 Presión en la cámara de válvula 23 Reservado� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Número de órdenes de posicionamiento (Count of positioning commands)
Parám. PNU: 305 Índice: 1 Índice máx.: 4 Clase: Struct Tipo de datos: int32Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 2�147�483�647Suma de todas las órdenes de inicio ejecutadas del controlador de posición.No se cuentan las actuaciones secuenciales, los recorridos de referencia ni las identificaciones.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Número de órdenes de fuerza (Count of force commands)
Parám. PNU: 305 Índice: 2 Índice máx.: 4 Clase: Struct Tipo de datos: int32Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 2�147�483�647Suma de todas las órdenes de inicio ejecutadas del controlador de fuerza.� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Suma de la carrera (Cumulated stroke length)
Parám. PNU: 305 Índice: 3 Índice máx.: 4 Clase: Struct Tipo de datos: int32Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 2�147�483�647Suma de los movimientos del accionamiento desde el estado nuevo o desde el último restablecimientode los datos o descarga del firmware. Aquí se registran todos los movimientos que ejecuta elaccionamiento, independientemente del modo de control o de la habilitación.Atención: La especificación se realiza siempre en metros, independientemente del sistema demedida fijado.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
254 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Suma de la fracción de carrera (Cumulated stroke length fraction)
Parám. PNU: 305 Índice: 4 Índice máx.: 4 Clase: Struct Tipo de datos:
int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 1�000�000
Suma de los movimientos del accionamiento desde que alcanza el último metro entero
(PNU 305:03). Aquí se registran todos los movimientos que ejecuta el accionamiento, independien
temente del modo de control o del desbloqueo.
Atención: La especificación se realiza siempre en micrómetros, independientemente del sistema de
medida fijado.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Velocidad actual (Current velocity)
Parám. PNU: 307 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,001 m/s - -10�000�000 10�000�000 1 /s - -10�000�000 10�000�000
Imperial 0,01 ft/s - -3�280�840 3�280�840 1 /s - -10�000�000 10�000�000
Velocidad real calculada.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 255
Estado ampliado del eje (Additional axis status)
Parám. PNU: 308 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos:
bitarray
Valores Valor
predeterminado:
-
Escritura: -
Información ampliada del estado del controlador.
También válida en el modo de funcionamiento Parametrización si SPOS no está disponible.
Bit Información de estado Bit de estado
0 Referenciado SPOS.REF
1 Motion Complete SPOS.MC
2 Accionamiento en movimiento SPOS.MOV
3 Error de seguimiento/error de tolerancia SPOS.DEV
4 En tolerancia –
5 Advertencia de reposo SPOS.STILL
6 Presión de alimentación dentro de la tolerancia –
7 ... 11 Reservado –
12 Control de posición activo –
13 Regulación de reposo activa –
14 Regulación de fuerza activa –
15, 16 Reservado –� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Valor regulado de la válvula (Valve output value)
Parám. PNU: 309 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos:
int32
Valores Valor predeterminado: 2047 Mínimo: 0 Máximo: 4095
Valor regulado interno para la válvula
Valor Valor normalizado Ventilación Escape de aire El accionamiento
4095 -100 % 1 --> 4 2 --> 3 ... se mueve en el sentido de
valores efectivos más pequeños
2047 0 % Cerrada Cerrada ... no se mueve
0 100 % 1 --> 2 4 --> 5 ... se mueve en el sentido de
valores efectivos más grandes� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
256 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
C.2.5 Tabla de frases
Información sobre la estructura de la tabla de frases � Sección 3.3.2.
Número de frase nominal (Requested record no)
Parám. PNU: 400 Índice: 1 Índice máx.: 3 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 128
El número de frase recibido con el último flanco de inicio.
Si todavía no se ha iniciado ninguna frase, el valor es 0 (número de frase inadmisible).
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Número de frase real (Actual record no)
Parám. PNU: 400 Índice: 2 Índice máx.: 3 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 128
El número de la última frase ejecutada.
Si todavía no se ha iniciado ninguna frase, el valor es 0. No es un número de frase admisible.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Byte de estado de frase (Record status byte)
Parám. PNU: 400 Índice: 3 Índice máx.: 3 Clase: Struct Tipo de datos:
bitarray
Valores Valor predeter
minado:
0000 0000 0000 0000 0000 0000 0000 0000
Escritura: -
Byte de estado de frase (RBS): Contiene un código de acuse de recibo que se transmite a los datos
de entrada.
Solo están definidos conforme a FHPP los bits 0 ... 7. Los bits 8 ... 31 siempre son 0. Descripción de
los bits � Sección 2.2.3.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 257
Byte de control de frase 1 (Record control byte 1)
Parám. PNU: 401 Índice: 1 ... 128 Índice máx.: 128 Clase: Array Tipo de datos:
bitarray
Valores Valor predeter
minado:
0000 0000 0000 0000 0000 0000 0000 0000
Escritura: 0000 0000 0000 0000 0000 0000 0xxx 0xxx
El byte de control de frase 1 (RCB1) controla los ajustes más importantes para la orden de
posicionamiento.
Se corresponde con el CDIR del modo directo (� Sección 2.2.4).
Bit NOMBRE Descripción
0
(REL)
Valor nominal relativo = 0: El valor nominal es absoluto (con control de posición
relativo al punto cero del proyecto)
= 1: El valor nominal es relativo al último valor nominal/
real1)
1
(COM1)
Modo de control 1 = 0: Control de posición
= 1: Regulación de fuerza
2
(COM2)
Modo de control 2 Solo con control de posición (COM1=0):
= 0: Perfil libre: Ajuste libre de la velocidad y la
aceleración
= 1: Perfil automático: El controlador predetermina la
velocidad y las aceleraciones2)
3 – Reservado, debe ser 0
4 Control de la velocidad
desactivado
Con regulación de fuerza:
= 0: Activar el valor límite de velocidad
= 1: Desactivar el valor límite de velocidad
5 Control de carrera desac
tivado
Con regulación de fuerza:
= 0: Activar control de carrera
= 1: Desactivar control de carrera
6 Parada rápida Regulación para activar MC al alcanzar el valor objetivo
(categoría de calidad � Sección 3.1.6)3)
= 0: Parada precisa
= 1: Parada rápida
7 ... 32 – Reservado, debe ser 01) Control de posición: El valor nominal es relativo al último valor nominal (con MC) o al valor efectivo (si MC no está activado).
Regulación de fuerza � Sección 3.1.2.
2) El controlador selecciona la velocidad y las aceleraciones conforme a la identificación, de manera que la posición de destino se
alcance lo más rápido posible y sin imprecisiones de posicionamiento.
3) SPOS.MC se activa solo cuando la orden de posicionamiento ha finalizado conforme a la regulación seleccionada. En el caso de
la parada rápida se desactiva la supervisión de reposo.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
258 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Byte de control de frase 2 (Record control byte 2)
Parám. PNU: 402 Índice: 1 ... 128 Índice máx.: 128 Clase: Array Tipo de datos:bitarray
Valores Valorpredeterminado:
0000 0000 0000 0000 0000 0000 0000 0000
Escritura: 0000 0000 0000 0000 0000 0000 xxxx xxxx
El byte de control de frase 2 (RCB2) controla la conmutación progresiva de frases condicional.
Bit Descripción
0 ... 6 Condición de conmutación progresiva para el encadenamiento automático de frases (valordecimal): 0: No hay conmutación progresiva; 2: Posición; 3: Fuerza; 4: Reposo; 5: Tiempo; 11: Carrera;12: MC; 13: Carrera en función de fuerza; 14: Posición con fuerza
7 = 1: Bloqueo de la conmutación progresiva de frases si se ha definido una condición. (Solo con fines de depuración, pero no para el control normal).
Los valores no mencionados son inadmisibles. Descripción � Sección 3.3.3.� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Valores predeterminados de frase (Record defaults)
Parám. PNU: 403 Índice: 1 ... 128 Índice máx.: 128 Clase: Array Tipo de datos:bitarray
Valores Valor predeterminado:
0000 0000 0000 0000 0000 0000 0000 0000
Escritura: xx00 0000 0000 0000 000x xxxx xxxx xxxx
El parámetro controla el bloqueo de la frase y la recepción de los valores predeterminados.
Bit Descripción
0 ... 12 = 0: Utilizar valor del parámetro de frase PNU 406 ss
= 1: Utilizar valores predeterminados globales conforme a PNU 600 ... 612
Información sobre los valores predeterminados globales � Sección 5.3.
30 = 0: Frase no inicializada o se ha borrado
= 1: Frase inicializada por el usuario
Las frases no inicializadas pueden contener datos pero no se ejecutan. El FCT las muestra como frases vacías (no hay carga/descarga ni desviación en la comparación)
31 = 0: Frase bloqueada (inactiva)
= 1: Frase desbloqueada (activa)
Las frases bloqueadas o inactivas no se ejecutan.� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 259
Valor nominal de frase (Record setpoint value)
Parám. PNU: 404 Índice: 1 ... 128 Índice máx.: 128 Clase: Array Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: -1�000�000 Máximo: 1�000�000
Modo de control de posición
(RCB1.COM1 = 0):
Valor nominal de posición en la unidad posición
(índice 1)
Modo de control de fuerza (RCB1.COM1 = 1): Valor nominal de fuerza en la unidad de fuerza
(índice 3)� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Valor preseleccionado de frase (Record preselection value)
Parám. PNU: 405 Índice: 1 ... 128 Índice máx.: 128 Clase: Array Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: -1�000�000 Máximo: 1�000�000
Contiene el valor con el que se efectúa la conmutación progresiva.
El significado depende de la condición de RCB2 (PNU 402):
Condición de conmutaciónprogresiva
Magnitud física (� Apéndice B.1)
2 Posición Posición/ángulo
3 Fuerza Fuerza
4 Reposo Tiempo
5 Tiempo Tiempo
11 Carrera Posición/ángulo
12 MC Tiempo
13 Carrera en función
de la fuerza
Posición
14 Posición con
fuerza
Posición
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
260 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Velocidad de frase (Record velocity)
Parám. PNU: 406 Índice: 1 ... 128 Índice máx.: 128 Clase: Array Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,001 m/s 0 0 10�000 1 /s 0 0 10�000
Imperial 0,01 ft/s 0 0 3�281 1 /s 0 0 10�000
Valor nominal de la velocidad, depende del modo de control y del perfil de movimiento (PNU 401):
Modo de control de posición, perfil libre:Velocidad máxima a la que debe desplazarse el accionamiento. Esta velocidad puede no alcanzarse
dependiendo de la carrera nominal y de las aceleraciones parametrizadas.
Modo de control de posición, perfil automático:El parámetro se ignora. La velocidad máxima se obtiene a partir del perfil de movimiento
determinado en la identificación.
Modo de control de fuerza:Velocidad máxima a la que se desplaza el accionamiento. Si la velocidad real alcanza este valor, el
controlador de fuerza se conmuta a Posicionamiento y sigue desplazándose a esta velocidad hasta
que alcanza la pieza a mecanizar y la velocidad se reduce o se alcanza la fuerza nominal. La
velocidad 0 desactiva la conmutación al control de posición (� Sección 3.1.2).
Valor predeterminado:
Para control de posición: PNU 403, bit 0 = 0: Valor predeterminado global del parámetro PNU 600
Para regulación de fuerza: PNU 403, bit 1 = 0: Valor predeterminado global del parámetro PNU 601� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 261
Aceleración de frase (Record acceleration)
Parám. PNU: 407 Índice: 1 ... 128 Índice máx.: 128 Clase: Array Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especifi
cación
Mínimo Máximo Unidad Especifi
cación
Mínimo Máximo
Métrico 0,001 m/s2 0 0 100�000 1 /s2 0 0 100�000
Imperial 0,01 ft/s2 0 0 32�808 1 /s2 0 0 100�000
Valor nominal de la aceleración para el arranque, depende del modo de control y del perfil de
movimiento (PNU 401):
Modo de control de posición, perfil libre:Aceleración nominal del controlador. Si se ha efectuado una identificación dinámica, este valor se
reduce a uno que pueda alcanzar el accionamiento.
Modo de control de posición, perfil automático:El parámetro se ignora. La aceleración se obtiene a partir del perfil de movimiento determinado en la
identificación.
Modo de control de fuerza:El parámetro se ignora.
Valor predeterminado:
Para control de posición: PNU 403, bit 2 = 0: Valor predeterminado global del parámetro PNU 602
Para regulación de fuerza: –� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
262 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Deceleración de frase (Record decelaration)
Parám. PNU: 408 Índice: 1 ... 128 Índice máx.: 128 Clase: Array Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,001 m/s2 0 0 100�000 1 /s2 0 0 100�000
Imperial 0,01 ft/s2 0 0 32�808 1 /s2 0 0 100�000
Valor nominal de deceleración para el frenado, depende del modo de control y del perfil demovimiento (PNU 401):Modo de control de posición, perfil libre:Deceleración nominal del controlador al frenar el eje. Si se ha efectuado una identificación dinámica,este valor se reduce a uno que pueda alcanzar el accionamiento.Modo de control de posición, perfil automático:El parámetro se ignora. La deceleración se obtiene a partir del perfil de movimiento determinado enla identificación.Modo de control de fuerza:El parámetro se ignora.
Valor predeterminado:
Para control de posición: PNU 403, bit 3 = 0: Valor predeterminado global del parámetro PNU 603
Para regulación de fuerza: –� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Carga útil de frase (Record payload)
Parám. PNU: 410 Índice: 1 ... 128 Índice máx.: 128 Clase: Array Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,1 kg 0 0 200�000 1 kg cm2 0 0 20�000
Imperial 1 lb 0 0 44�093 0,1 lb in2 0 0 68�343
Carga útil actual.Las desviaciones de la masa de la carga real afectan negativamente al comportamiento deposicionamiento. A partir de modificaciones de la carga de masa de aprox. 30 %, debe especificarse lacarga útil actual. La masa en movimiento total se obtiene sumando la carga básica (PNU 1142) y la cargaútil.En montaje vertical, la carga útil correcta es obligatoria para calcular la fuerza cero de la regulación defuerza. Un error en la especificación al indicar el valor nominal de 0 N puede causar el movimiento delaccionamiento.
Valor predeterminado:
Para control de posición: PNU 403, bit 5 = 0: Valor predeterminado global del parámetro PNU 605
Para regulación de fuerza: PNU 403, bit 5 = 0: Valor predeterminado global del parámetro PNU 605� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 263
Tolerancia de frase (Record tolerance)
Parám. PNU: 411 Índice: 1 ... 128 Índice máx.: 128 Clase: Array Tipo de datos: int32
Valores Control de posición actuador lineal Control de posición actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,01 mm 0 0 1�000 0,1 0 0 100
Imperial 0,001 in 0 0 394 0,1 0 0 100
Regulación de fuerza actuador lineal Regulación de fuerza actuador giratorio
Unidad Especificación
Mínimo Máximo En los actuadores giratorios no estápermitida la regulación de fuerza.
Métrico 1 N 0 0 1�000
Imperial 1 lbf 0 0 225
Especificación de la tolerancia que debe utilizarse en esta frase.
Modo de control de posición (RCB1.COM1 = 0) Tolerancia de posición en la unidad de posición(índice 1)
Modo de control de posición (RCB1.COM1 = 1) Tolerancia de fuerza en la unidad de fuerza (índice 3)
Valor predeterminado:
Para control de posición: PNU 403, bit 6 = 0: Valor predeterminado global del parámetro PNU 606
Para regulación de fuerza: PNU 403, bit 7 = 0: Valor predeterminado global del parámetro PNU 607� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Rampa de fuerza de frase (Record force ramp)
Parám. PNU: 412 Índice: 1 ... 128 Índice máx.: 128 Clase: Array Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo En los actuadores giratorios no estápermitida la regulación de fuerza.
Métrico 1 N/s 0 0 100�000
Imperial 1 lbf/s 0 0 22�481
La rampa de fuerza permite ajustar la velocidad de aumento de la fuerza. El controlador genera unaumento en forma sen2 de la fuerza nominal para optimizar el comportamiento de regulación(� Sección 3.1.2).
Valor predeterminado:
Para control de posición: –
Para regulación de fuerza: PNU 403, bit 8 = 0: Valor predeterminado global del parámetro PNU 608� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
264 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
C.2.6 Datos del proyecto
Descripción general del sistema de referencia de medida (� Apéndice B.2).
Decalaje del punto cero del proyecto (Offset project zero point)
Parám. PNU: 500 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,01 mm 0 -1�000�000 1�000�000 0,1 0 -100�000 100�000
Imperial 0,001 in 0 -393�701 393�701 0,1 0 -100�000 100�000
Punto de referencia para valores de posición en la aplicación (� Apéndice B.2).
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Posición final por software (Limit setpoint position)
Parám. PNU: 501 Índice: 1 ... 2 Índice máx.: 2 Clase: Var Tipo de datos:
int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,01 mm 0 0 1�000�000 0,1 0 0 100�000
Imperial 0,001 in 0 0 393�701 0,1 0 0 100�000
Margen admisible para valores nominales de posición. No está permitido arrancar con una posición
de destino fuera de las posiciones finales por software ya que ello produce un error o una
advertencia. Si se avanza más allá de las posiciones finales por software, se emite una advertencia.
Se especifica el decalaje del punto cero del eje (no del punto cero del proyecto). Indicar 0 en las dos
posiciones finales por software desactiva las posiciones finales por software.
Índice 1: Posición final inferior por software
Índice 2: Posición final superior por software
El controlador comprueba la plausibilidad de las posiciones finales por software y en caso de
desviación genera un error. Notas sobre el cálculo de las posiciones finales por software y ejemplo
de cálculo para los valores máximos � Apéndice B.2.4.� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 265
Deceleración de parada (Stop deceleration)
Parám. PNU: 507 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,001 m/s2 10�000 10 100�000 1 /s2 10�000 10 100�000Imperial 0,01 ft/s2 3�000 3 32�808 1 /s2 10�000 10 100�000Deceleración en caso de parada o de error. La deceleración de la rampa de parada a ejecutar es elmáximo de:– deceleración de rampa de parada PNU 507– deceleración nominal en la última orden de posicionamiento PNU 408� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Carrera crítica con regulación de fuerza (Critical stroke during force control)
Parám. PNU: 510 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,01 mm 5�000 100 1�000�000 0,1 100 10 100�000Imperial 0,001 in 2�000 39 393�701 0,1 100 10 100�000Carrera máxima permitida con la regulación de fuerza activa.Con una regulación de fuerza activa, la posición real relativa respecto a la posición inicial no puedemodificarse más de lo indicado en este parámetro. Esto permite garantizar que el eje no se mueva deforma descontrolada en caso de que la regulación de fuerza se active por error (p. ej. “falta pieza”).La supervisión se puede desactivar mediante la activación del bit RCB1.XLIM o CDIR.XLIM
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Valor nominal de fuerza mín. admisible (Lower limit setpoint force)
Parám. PNU: 511 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo En los actuadores giratorios no estápermitida la regulación de fuerza.
Métrico 1 N 0 -100�000 0Imperial 1 lbf 0 -22�481 0Valor mínimo admisible para una regulación de fuerza. Un valor nominal menor causa un error o unaadvertencia.Si los valores nominales de fuerza mínimo (PNU 511) y máximo (PNU 512) admisibles se ajustan acero, los límites de valor nominal se ignoran al ejecutar una orden de fuerza� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
266 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Valor nominal de fuerza máx. admisible (Upper limit setpoint force)
Parám. PNU: 512 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo En los actuadores giratorios no estápermitida la regulación de fuerza.
Métrico 1 N 0 0 100�000
Imperial 1 lbf 0 0 22�481
Valor máximo admisible para una regulación de fuerza. Un valor nominal mayor causa un error o unaadvertencia.Si los valores nominales de fuerza mínimo (PNU 511) y máximo (PNU 512) admisibles se ajustan acero, los límites de valor nominal se ignoran al ejecutar una orden de fuerza.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Velocidad crítica con regulación de fuerza (Critical velocity during force control)
Parám. PNU: 514 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,001 m/s 200 10 500 1 /s 200 10 500
Imperial 0,01 ft/s 65 3 164 1 /s 200 10 500
Velocidad máx. permitida tras iniciar una orden de fuerza. Este parámetro se utiliza para supervisar yno para limitar la velocidad. Si la velocidad real sobrepasa el valor ajustado, se emite un error, el ejese para y la orden de fuerza se cancela.El valor límite de velocidad debe ser considerablemente superior al de la limitación de velocidad delos PNU 406/554. De lo contrario, la supervisión causa un fallo al alcanzar el límite de velocidad. Espreferible ajustar el valor límite de velocidad por razones de seguridad si se ha desactivado lalimitación de velocidad (PNU 406/554).
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Valores predeterminados de operación por actuación secuencial (Jog mode defaults)
Parám. PNU: 521 Índice: 1 Índice máx.: 4 Clase: Array Tipo de datos:bitarray
Valores Valorpredeterminado:
0000 0000 0000 0000 0000 0000 0000 1101
Escritura: 0000 0000 0000 0000 0000 000x xxxx xxxx
Este parámetro determina la utilización de los valores predeterminados en la actuación secuencial (jog).Un bit activado significa que, en vez de los valores predeterminados globales (PNU 6xx), se utilizan losparámetros de actuación secuencial (PNU 53x) � Sección 5.3.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
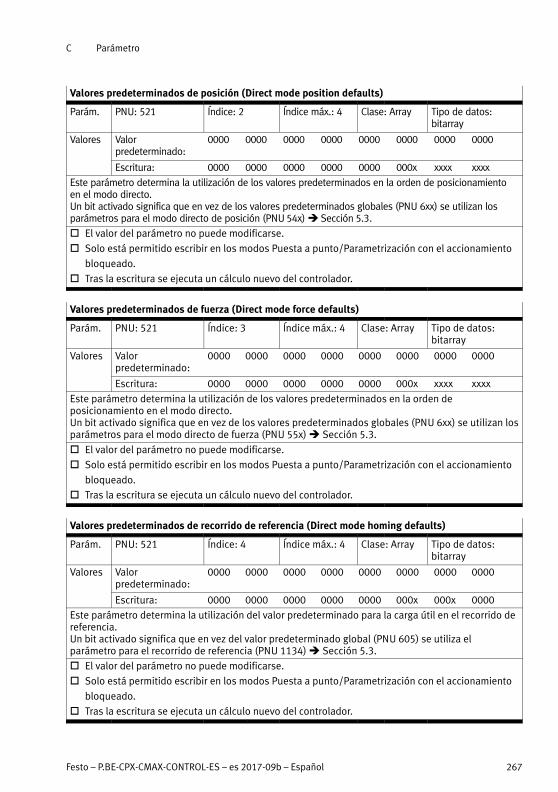
C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 267
Valores predeterminados de posición (Direct mode position defaults)
Parám. PNU: 521 Índice: 2 Índice máx.: 4 Clase: Array Tipo de datos:bitarray
Valores Valorpredeterminado:
0000 0000 0000 0000 0000 0000 0000 0000
Escritura: 0000 0000 0000 0000 0000 000x xxxx xxxx
Este parámetro determina la utilización de los valores predeterminados en la orden de posicionamientoen el modo directo.Un bit activado significa que en vez de los valores predeterminados globales (PNU 6xx) se utilizan losparámetros para el modo directo de posición (PNU 54x) � Sección 5.3.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Valores predeterminados de fuerza (Direct mode force defaults)
Parám. PNU: 521 Índice: 3 Índice máx.: 4 Clase: Array Tipo de datos:bitarray
Valores Valorpredeterminado:
0000 0000 0000 0000 0000 0000 0000 0000
Escritura: 0000 0000 0000 0000 0000 000x xxxx xxxx
Este parámetro determina la utilización de los valores predeterminados en la orden deposicionamiento en el modo directo.Un bit activado significa que en vez de los valores predeterminados globales (PNU 6xx) se utilizan losparámetros para el modo directo de fuerza (PNU 55x) � Sección 5.3.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Valores predeterminados de recorrido de referencia (Direct mode homing defaults)
Parám. PNU: 521 Índice: 4 Índice máx.: 4 Clase: Array Tipo de datos:bitarray
Valores Valorpredeterminado:
0000 0000 0000 0000 0000 0000 0000 0000
Escritura: 0000 0000 0000 0000 0000 000x 000x 0000
Este parámetro determina la utilización del valor predeterminado para la carga útil en el recorrido dereferencia.Un bit activado significa que en vez del valor predeterminado global (PNU 605) se utiliza elparámetro para el recorrido de referencia (PNU 1134) � Sección 5.3.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
268 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Reservado (Reserved)
Parám. PNU: 522 Índice: 1 Índice máx.: 2 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 0
Reservado.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
FHPP: Bits control/estado: Nivel CCON.BRAKE (FHPP: Control-/Statusbits: CCON.BRAKE level)
Parám. PNU: 522 Índice: 2 Índice máx.: 2 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 1
Efecto unidad de bloqueo/freno.
Valor Función
0 Unidad de bloqueo/freno se abre (salida de conexión de la válvula a 24 V) con CCON.BRAKE = 1
1 Unidad de bloqueo/freno se abre (salida de conexión de la válvula a 24 V) con CCON.BRAKE = 0� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 269
FHPP: Valores nominales y efectivos (FHPP: Setpoint and actual values)
Establecimiento de los valores nominales y efectivos en los datos I/O cíclicos para los diferentes
modos de regulación � Sección 2.2. El valor predeterminado para cada índice es 0.
Índice Valor nominal/efectivo
Valor Nombre A partirde FW
Control de posición
1 Valor nominal se
cundario
= 0: Velocidad en tanto por ciento de PNU 540/600 1.0
= 1: Carga útil en tanto por ciento de PNU 544/605 1.0
2 Valor nominal prin
cipal
= 0: Posición nominal en sistema de medición � B.1 1.0
= 1: Posición nominal y fuerza nominal 2.3
3 Valor efectivo se
cundario
= 0: Dependiendo de los modos de funcionamiento 1.0
= 1: Número de error 2.2
= 2: Número de error o de advertencia 2.3
4 Valor efectivo prin
cipal
= 0: Posición efectiva en el sistema de medición
� B.1
1.0
= 1: Fuerza efectiva en el sistema de medición � B.1 1.0
= 2: Posición efectiva y fuerza efectiva (compatible
con V2.2)1)
2.2
= 3: Posición efectiva y fuerza efectiva1) 2.3
Control de fuerza
5 Valor nominal se
cundario
= 0: Rampa de fuerza en tanto por ciento de PNU
550/608
1.0
= 1: Carga útil en tanto por ciento de PNU 551/605 1.0
6 Valor nominal prin
cipal
= 0: Fuerza nominal en el sistema de medida � B.1 1.0
= 1: Posición nominal y fuerza nominal 2.3
7 Valor efectivo se
cundario
= 0: Dependiendo de los modos de funcionamiento 1.0
= 1: Número de error 2.2
= 2: Número de error o de advertencia 2.3
8 Valor efectivo prin
cipal
= 0: Posición efectiva en el sistema de medición
� B.1
1.0
= 1: Fuerza efectiva en el sistema de medición � B.1 1.0
= 2: Posición efectiva y fuerza efectiva (compatible
con V2.2)1)
2.2
= 3: Posición efectiva y fuerza efectiva1) 2.31) Con valor 2 la disposición de posición efectiva y fuerza efectiva en los datos de entrada depende del ajuste del sistema CPX
“Representación análoga de valor de proceso”. Con valor 3 se transmite la posición efectiva siempre en bytes 5+6 y la fuerza
efectiva en bytes 7+8.
La resolución se adapta en función del diámetro del cilindro -� Sección 2.2.7.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
270 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Reglas de parametrización– Valor efectivo secundario: El valor efectivo secundario tiene que estar configurado de la misma
manera para el control de fuerza y el control de posición (esto es, ambos = 0, ambos = 1 o ambos
= 2).
– Valor nominal secundario:
– Los valores no transmitidos en el valor nominal secundario de velocidad, rampa de fuerza o
carga útil se utilizan al 100 % del valor básico.
– Con valor nominal principal “Posición nominal y fuerza nominal” (PNU 523:02 = PNU 523:06 =
1) y valor nominal secundario “Velocidad” (PNU 523:01 = PNU 523:05 = 0), la velocidad solo se
utiliza en el control de posición. En el control de fuerza se ignora el valor nominal secundario y
se utiliza la rampa de fuerza al 100 % de PNU 550/608.
– Valor efectivo principal y valor nominal principal:
– Con los valores efectivos principales y nominales principales combinados (posición efectiva y
fuerza efectiva, posición nominal y fuerza nominal) se escala la resolución en función del
diámetro del cilindro � Sección 2.2.7.
– Se admite el valor 2 para el valor efectivo principal (posición efectiva y fuerza efectiva) solo por
motivos de compatibilidad. Se recomienda no utilizar más esta variante.
– Si en la fuerza o posición se ajusta el valor efectivo principal en 3 (2), en cualquier otro modo de
regulación debe estar ajustado también el valor 3 (2).
– Actuadores giratorios: el control de fuerza y la indicación de valores de fuerza/par no son compa
tibles y no pueden por tanto seleccionarse.
– Los valores nominales y efectivos deberían parametrizarse siempre igual para el control de posi
ción y el control de fuerza (PNU 523:1 = PNU 523:5 / PNU 523:2 = PNU 523:6 / PNU 523:3 = PNU
523:7 / PNU 523:4 = PNU 523:8). Por motivos de compatibilidad siguen existiendo combinaciones
autorizadas en versiones de firmware anteriores.
Notas sobre tipos de funcionamientoLos valores nominales son válidos solamente para una tarea de posicionado en el funcionamiento
directo y no influyen en la actuación secuencial ni recorrido de referencia.
En la configuración de 523.3 = 523.7 = 0 el valor efectivo secundario depende del modo de funciona
miento:
– Modo de frase: bytes de estado de la frase PNU 400:03
– Modo directo: Velocidad efectiva en tanto por ciento de PNU 540/600
– Puesta a punto: Progreso / destino de teach-in
La longitud del cilindro se guarda en el sistema de medición de recorrido. La longitud de los cilindros
estándar no supera los 2000 mm; el margen de valores incluye una reserva para aplicaciones especia
les.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 271
C.2.7 Operación por actuación secuencial
Velocidad lenta en operación por actuación secuencial(Jog mode slow velocity)
Parám. PNU: 530 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,001 m/s 50 10 500 1 /s 50 10 500
Imperial 0,01 ft/s 15 3 164 1 /s 50 10 500
Velocidad lenta durante la actuación secuencial.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Velocidad máxima en operación por actuación secuencial (Jog mode fast velocity)
Parám. PNU: 531 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,001 m/s 200 10 10�000 1 /s 200 10 10�000
Imperial 0,01 ft/s 65 3 3�281 1 /s 200 10 10�000
Velocidad máxima una vez finalizada la duración de la marcha lenta en la actuación secuencial.Solo es efectivo cuando se desactiva la utilización del valor predeterminado global (valorpredeterminado de velocidad en control de posición, PNU 600) con PNU 521:01.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Aceleración en operación por actuación secuencial (Jog mode acceleration)
Parám. PNU: 532 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,001 m/s2 100 10 100�000 1 /s2 100 10 100�000
Imperial 0,01 ft/s2 30 3 32�808 1 /s2 100 10 100�000
Aceleración en la actuación secuencial.Solo es efectivo cuando se desactiva la utilización del valor predeterminado global (valorpredeterminado de aceleración, PNU 602) con PNU 521:01.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
272 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Deceleración en operación por actuación secuencial (Jog mode decelaration)
Parám. PNU: 533 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,001 m/s2 500 10 100�000 1 /s2 500 10 100�000
Imperial 0,01 ft/s2 150 3 32�808 1 /s2 500 10 100�000
Deceleración en la actuación secuencial.
Solo es efectivo cuando se desactiva la utilización del valor predeterminado global (valor
predeterminado de deceleración, PNU 603) con PNU 521:01.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Duración de marcha lenta en operación por actuación secuencial (Jog mode crawling time)
Parám. PNU: 534 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 1 ms 3�000 0 1�000�000 1 ms 3�000 0 1�000�000
Imperial 1 ms 3�000 0 1�000�000 1 ms 3�000 0 1�000�000
Duración de la fase lenta.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Carga útil en operación por actuación secuencial (Jog mode payload)
Parám. PNU: 536 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,1 kg 0 0 200�000 1 kg cm2 0 0 20�000
Imperial 1 lb 0 0 44�093 0,1 lb in2 0 0 68�343
Carga útil en la actuación secuencial.
Solo es efectivo cuando se desactiva la utilización del valor predeterminado global (valor
predeterminado de carga útil, PNU 605) con PNU 521:01.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 273
C.2.8 Modo directo control de posición
Velocidad en modo directo posición (Direct mode position velocity)
Parám. PNU: 540 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,001 m/s 2�000 10 10�000 1 /s 1�000 10 10�000
Imperial 0,01 ft/s 650 3 3�281 1 /s 1�000 10 10�000
Valor básico de la velocidad en el modo directo con control de posición.
El control transfiere un valor porcentual a los datos de salida que se multiplica por el valor básico
para obtener la velocidad nominal definitiva.
En caso de especificación de valor nominal continua (modo de seguimiento) los valores nominales se
calculan internamente � Sección 3.4.2.
Solo es efectivo cuando se desactiva la utilización del valor predeterminado global (valor
predeterminado de velocidad en control de posición, PNU 600) con PNU 521:02.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Aceleración en modo directo posición (Direct mode position acceleration)
Parám. PNU: 541 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,001 m/s2 2�000 10 100�000 1 /s2 1�000 10 100�000
Imperial 0,01 ft/s2 650 3 32�808 1 /s2 1�000 10 100�000
Aceleración en el modo directo control de posición � Sección 3.4.
En caso de especificación de valor nominal continua (modo de seguimiento) los valores nominales se
calculan internamente � Sección 3.4.2.
Solo es efectivo cuando se desactiva la utilización del valor predeterminado global (valor
predeterminado de aceleración, PNU 602) con PNU 521:02.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
274 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Deceleración en modo directo posición (Direct mode position decelaration)
Parám. PNU: 542 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,001 m/s2 2�000 10 100�000 1 /s2 1�000 10 100�000
Imperial 0,01 ft/s2 650 3 32�808 1 /s2 1�000 10 100�000
Deceleración en el modo directo control de posición � Sección 3.4.PNU 542 no se utiliza en caso de especificación de valor nominal continua (modo de seguimiento)� Sección 3.4.2.Solo es efectivo cuando se desactiva la utilización del valor predeterminado global (valorpredeterminado de deceleración, PNU 603) con PNU 521:02.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Carga útil modo directo posición (Direct mode position payload)
Parám. PNU: 544 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,1 kg 0 0 200�000 1 kg cm2 0 0 20�000
Imperial 1 lb 0 0 44�093 0,1 lb in2 0 0 68�343
Carga útil en el modo directo con control de posición.Solo es efectivo cuando se desactiva la utilización del valor predeterminado global (valorpredeterminado de carga útil, PNU 605) con PNU 521:02.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Tolerancia modo directo posición (Direct mode position tolerance)
Parám. PNU: 545 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,01 mm 100 10 1�000 0,1 10 1 100
Imperial 0,001 in 40 4 394 0,1 10 1 100
Tolerancia en el modo directo con control de posición.Solo es efectivo cuando se desactiva la utilización del valor predeterminado global (valor predeterminado de tolerancia de posición, PNU 606) con PNU 521:02.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 275
C.2.9 Modo directo con control de fuerza
Rampa de fuerza modo directo fuerza (Direct mode force value force ramp)
Parám. PNU: 550 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo En los actuadores giratorios no estápermitida la regulación de fuerza.
Métrico 1 N/s 1�000 10 100�000
Imperial 1 lbf/s 200 2 22�481
Valor básico para la rampa de fuerza en el modo directo. El control transfiere un valor porcentual alos datos de salida que se multiplica por el valor básico para obtener la rampa nominal definitiva.Solo es efectivo cuando se desactiva la utilización del valor predeterminado global (valor predeterminado de rampa de fuerza, PNU 608) con PNU 521:03.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Carga útil modo directo fuerza (Direct mode force payload)
Parám. PNU: 551 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo En los actuadores giratorios no estápermitida la regulación de fuerza.
Métrico 0,1 kg 0 0 200�000
Imperial 1 lb 0 0 44�093
Carga útil en el modo directo con control de fuerza.Solo es efectivo cuando se desactiva la utilización del valor predeterminado global (valor predeterminado de carga útil, PNU 605) con PNU 521:03.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Tolerancia de fuerza modo directo fuerza (Direct mode force tolerance force)
Parám. PNU: 552 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo En los actuadores giratorios no estápermitida la regulación de fuerza.
Métrico 1 N 10 1 1�000
Imperial 1 lbf 3 1 225
Margen de tolerancia en el modo directo con control de fuerza.Solo es efectivo cuando se desactiva la utilización del valor predeterminado global (valorpredeterminado de tolerancia de fuerza, PNU 607) con PNU 521:03.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
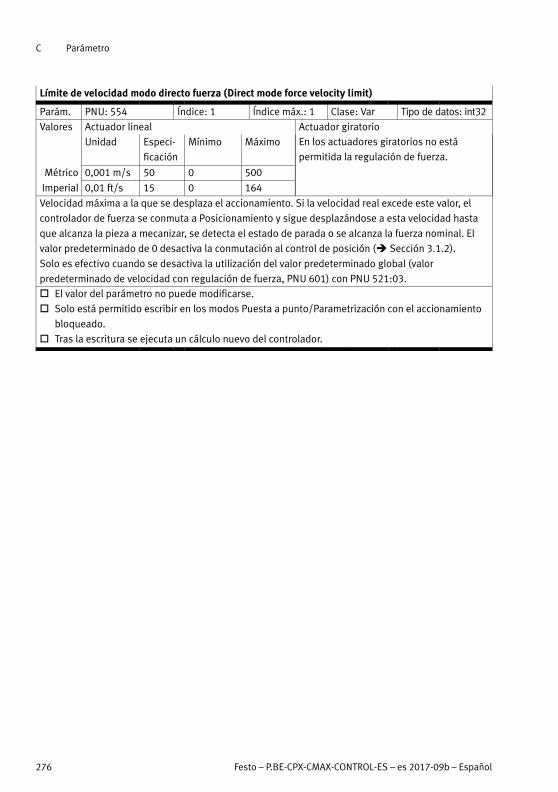
C Parámetro
276 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Límite de velocidad modo directo fuerza (Direct mode force velocity limit)
Parám. PNU: 554 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo En los actuadores giratorios no está
permitida la regulación de fuerza.
Métrico 0,001 m/s 50 0 500
Imperial 0,01 ft/s 15 0 164
Velocidad máxima a la que se desplaza el accionamiento. Si la velocidad real excede este valor, el
controlador de fuerza se conmuta a Posicionamiento y sigue desplazándose a esta velocidad hasta
que alcanza la pieza a mecanizar, se detecta el estado de parada o se alcanza la fuerza nominal. El
valor predeterminado de 0 desactiva la conmutación al control de posición (� Sección 3.1.2).
Solo es efectivo cuando se desactiva la utilización del valor predeterminado global (valor
predeterminado de velocidad con regulación de fuerza, PNU 601) con PNU 521:03.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 277
C.2.10 Valores predeterminados globales
Valor predeterminado velocidad control de posición (Default value velocity position mode)
Parám. PNU: 600 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,001 m/s 2�000 10 10�000 1 /s 1�000 10 10�000
Imperial 0,01 ft/s 650 3 3�281 1 /s 1�000 10 10�000
Este valor contiene la velocidad predeterminada global. Se utiliza en todas las órdenes de posicionamiento con control de posición en las que no se especifica ninguna velocidad individual (� Sección 5.3).PNU 403/521-Bit = Bit 0 (= 00000001h)
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Valor predeterminado límite de velocidad regulación de fuerza (Default value velocity limit force mode)
Parám. PNU: 601 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo En los actuadores giratorios no estápermitida la regulación de fuerza.
Métrico 0,001 m/s 50 0 500
Imperial 0,01 ft/s 15 0 164
Este valor contiene la velocidad predeterminada global. Se utiliza en todas las órdenes de posicionamientocon regulación de fuerza en las que no se especifica ninguna velocidad individual (� Sección 5.3).PNU 403/521-Bit = Bit 1 (= 0000�0002h)
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Valor predeterminado aceleración (Default value acceleration)
Parám. PNU: 602 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,001 m/s2 2�000 10 100�000 1 /s2 1�000 10 100�000
Imperial 0,01 ft/s2 650 3 32�808 1 /s2 1�000 10 100�000
Este valor contiene la aceleración predeterminada global. Se utiliza en todas las órdenes de posicionamiento con control de posición en las que no se especifica ninguna aceleración individual (� Sección 5.3).PNU 403/521-Bit = Bit 2 (=0000�0004h)
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
278 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Valor predeterminado deceleración (Default value decelaration)
Parám. PNU: 603 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,001 m/s2 2�000 10 100�000 1 /s2 1000 10 100�000
Imperial 0,01 ft/s2 650 3 32�808 1 /s2 1000 10 100�000
Este valor contiene la deceleración predeterminada global. Se utiliza en todas las órdenes de posicionamiento con control de posición en las que no se especifica ninguna deceleración individual(� Sección 5.3).PNU 403/521-Bit = Bit 3 ( = 0000�0008h)
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Valor predeterminado carga útil (Default value payload)
Parám. PNU: 605 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,1 kg 0 0 200�000 1 kg cm2 0 0 20�000
Imperial 1 lb 0 0 44�093 0,1 lb in2 0 0 68�343
Este valor contiene la carga útil predeterminada global. Se utiliza en todas las órdenes de posicionamiento en las que no se especifica ninguna carga útil individual (� Sección 5.3).PNU 403/521-Bit = Bit 5 (= 0000�0020h)
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Valor predeterminado tolerancia posición (Default value tolerance position mode)
Parám. PNU: 606 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 0,01 mm 100 10 1�000 0,1 10 1 100
Imperial 0,001 in 40 4 394 0,1 10 1 100
Este valor contiene la tolerancia predeterminada global para el control de posición. Se utiliza entodas las órdenes de posicionamiento con control de posición en las que no se especifica ningunatolerancia individual (� Sección 5.3).PNU 403/521-Bit = Bit 6 (=0000�0040h)
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 279
Valor predeterminado tolerancia fuerza (Default value tolerance force mode)
Parám. PNU: 607 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo En los actuadores giratorios no está
permitida la regulación de fuerza.
Métrico 1 N 10 1 1�000
Imperial 1 lbf 3 1 225
Este valor contiene la tolerancia predeterminada global para la regulación de fuerza. Se utiliza en
todas las órdenes de posicionamiento con regulación de fuerza en las que no se especifica ninguna
tolerancia individual (� Sección 5.3).
PNU 403/521-Bit = Bit 7 (=0000�0080h)
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Valor predeterminado rampa de fuerza (Default value force ramp)
Parám. PNU: 608 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo En los actuadores giratorios no está per
mitida la regulación de fuerza.
Métrico 1 N/s 1�000 10 100�000
Imperial 1 lbf/s 200 2 22�481
Este valor contiene la rampa de fuerza predeterminada global. Se utiliza en todas las órdenes de
posicionamiento con regulación de fuerza en las que no se especifica ninguna rampa de fuerza
individual (� Sección 5.3).
PNU 403/521-Bit = Bit 8 (=0000�0100h)
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
280 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
C.2.11 Configuración del accionamientoLa configuración de hardware es importante para el cálculo del controlador. Se detecta
automáticamente la mayor cantidad de datos posible. Los datos no reconocidos deben ser
determinados por el usuario, p. ej., en función a la placa de características.
Si uno de los valores siguientes se determina durante la detección de hardware automática, solo
puede escribirse el valor registrado en el sistema de medición de recorrido o en la válvula. Si se
escribe otro valor, se produce un error de parámetro. Si para un parámetro no se ha encontrado
ningún valor registrado, puede parametrizarse siempre dentro del margen indicado.
Más información � Apéndice B.1.
Cilindro (Cylinder)
Parám. PNU: 1100 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 1 Máximo: 7
El tipo de cilindro se guarda en el sistema de medición de recorrido o en la conexión de sensores. En
el CMAX están definidos los tipos siguientes:
Valor Tipo
0 Desconocido
1 Actuador lineal sin vástago (también para eje DGPI definido por el usuario)
2 Accionamiento con vástago
3 DGCI
4 DNCI
5 DSMI
6 DDPC
7 DDLI� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 281
Longitud del cilindro (Cylinder length)
Parám. PNU: 1101 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,01 mm 0 5�000 202�000 0,1 0 500 100�000
Imperial 0,01 mm 0 5�000 202�000 0,1 0 500 100�000
La longitud del cilindro se guarda en el sistema de medición de recorrido. La longitud de los cilindros
estándar no supera los 2000 mm; el margen de valores incluye una reserva para aplicaciones
especiales.
La longitud del cilindro especificada puede diferir en 5,00 mm de la longitud nominal a fin de
optimizar la carrera útil.
En combinación con el DGCI: Si se utiliza una unidad de bloqueo integrada (opción de pedido
1HPN), la longitud del cilindro es mayor que la longitud nominal. Esto debe tenerse en cuenta en la
especificación de la longitud del cilindro � Apéndice B.2.5.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Diámetro del cilindro (Cylinder diameter)
Parám. PNU: 1102 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,01 mm 0 1�600 32�000 Diámetro
de
0,01 mm
0 1�200 32�000
Imperial 0,01 mm 0 1�200 32�000 Diámetro
de
0,01 mm
0 1�200 32�000
El diámetro del cilindro se guarda en el sistema de medición de recorrido.
Si el CMAX no ha detectado el diámetro del cilindro (p. ej., con DGCI), el valor no puede sobrescribirse.
Los ejes dobles se pueden configurar a través de PNU 1143:2 (diseño de eje doble).
Otros diámetros solo pueden planificarse a través de tipos de cilindros específicos del usuario.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
282 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Diámetro del vástago (Piston rod diameter)
Parám. PNU: 1103 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,01 mm 0 0 32�000 Diámetro
de
0,01 mm
0 0 32�000
Imperial 0,01 mm 0 0 32�000 Diámetro
de
0,01 mm
0 0 32�000
El diámetro del vástago no se detecta automáticamente. En todo caso, existe una asignación fija de
los diámetros de cilindros respecto a los diámetros de vástagos para los accionamientos estándar de
Festo. Esta asignación está almacenada en el FCT.
En otros accionamientos y aplicaciones especiales, el diámetro del vástago puede parametrizarse
libremente utilizando el tipo definido por el usuario.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
DGCI: Unidad de bloqueo integrada (DCGI: Integrated clamping unit)
Parám. PNU: 1104 Índice: 1 Índice máx.: 6 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 1
Si se utiliza un DGCI: El accionamiento está equipado con la unidad de bloqueo integrada 1H-PN.
El accionamiento se prolonga de forma equivalente a la longitud de la unidad de bloqueo. El CMAX
debe conocer la longitud total del cilindro para que el regulador pueda funcionar correctamente. No
obstante, el parámetro longitud del cilindro (PNU 1101) solo contiene la longitud nominal. Para el
controlador, el CMAX añade a la longitud del cilindro la longitud de carrera dependiente del diáme
tro.
Si se modifica el parámetro hay que restablecer los datos de identificación.
Opción de accionamiento del DGCI � Sección B.2.5
Valor Significado
0 Unidad de fijación integrada del tipo 1H-PN inexistente
1 Unidad de fijación integrada del tipo 1H-PN existente. Se adapta la longitud del cilindro en
el CMAX.� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 283
DGCI: Carro adicional (DGCI: Additional slide)
Parám. PNU: 1104 Índice: 2 Índice máx.: 6 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 3
Si se utiliza un DGCI: Hay un carro adicional de movimiento sincronizado para aumentar los pares. El
carro adicional reduce la carrera útil. Con ayuda de este parámetro el plugin calcula las posiciones
finales por software necesarias para que el accionamiento no se desplace al tope.
En la parametrización a través del control, el programador del control debe determinar él mismo las
posiciones finales por software. Cálculo � Sección B.2.5.
Recomendación: El cálculo debería realizarse a través del plugin y los parámetros ser aceptados o
exportados desde él.
Valor Significado
0 Sin carro adicional
1 Carro adicional a la izquierda (-KL)
2 Carro adicional a la derecha (-KR)
3 Carro adicional a la izquierda y a la derecha (-KL-KR)� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
DGCI: Función de lubricación (DGCI: Lubrication)
Parám. PNU: 1104 Índice: 3 Índice máx.: 6 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 1
En combinación con el DGCI y la utilización de un carro adicional: El accionamiento ha sido con
figurado con lubricación central. La lubricación central influye en la longitud del carro y por ello debe
tenerse en cuenta en el cálculo de las posiciones finales por software. El plugin tiene en cuenta la
longitud específica del carro en el cálculo de las posiciones finales por software.
En la parametrización a través del sistema de mando, el programador debe determinar él mismo las
posiciones finales por software. Cálculo � Sección B.2.5.
Recomendación: El cálculo debería realizarse a través del plugin y los parámetros ser aceptados o
exportados desde él.
Valor Significado
0 Estándar
1 Adaptador de lubricación (-C)� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
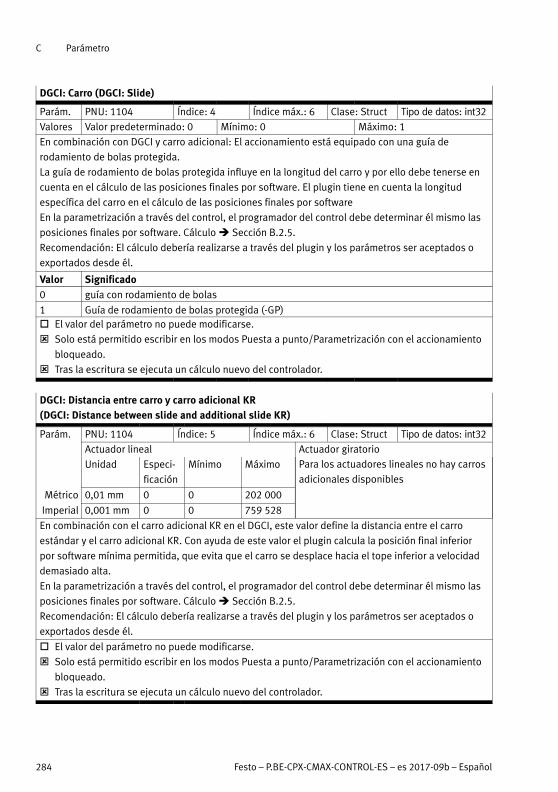
C Parámetro
284 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
DGCI: Carro (DGCI: Slide)
Parám. PNU: 1104 Índice: 4 Índice máx.: 6 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 1
En combinación con DGCI y carro adicional: El accionamiento está equipado con una guía de
rodamiento de bolas protegida.
La guía de rodamiento de bolas protegida influye en la longitud del carro y por ello debe tenerse en
cuenta en el cálculo de las posiciones finales por software. El plugin tiene en cuenta la longitud
específica del carro en el cálculo de las posiciones finales por software
En la parametrización a través del control, el programador del control debe determinar él mismo las
posiciones finales por software. Cálculo � Sección B.2.5.
Recomendación: El cálculo debería realizarse a través del plugin y los parámetros ser aceptados o
exportados desde él.
Valor Significado
0 guía con rodamiento de bolas
1 Guía de rodamiento de bolas protegida (-GP)� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
DGCI: Distancia entre carro y carro adicional KR (DGCI: Distance between slide and additional slide KR)
Parám. PNU: 1104 Índice: 5 Índice máx.: 6 Clase: Struct Tipo de datos: int32
Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Para los actuadores lineales no hay carros
adicionales disponibles
Métrico 0,01 mm 0 0 202�000
Imperial 0,001 mm 0 0 759�528
En combinación con el carro adicional KR en el DGCI, este valor define la distancia entre el carro
estándar y el carro adicional KR. Con ayuda de este valor el plugin calcula la posición final inferior
por software mínima permitida, que evita que el carro se desplace hacia el tope inferior a velocidad
demasiado alta.
En la parametrización a través del control, el programador del control debe determinar él mismo las
posiciones finales por software. Cálculo � Sección B.2.5.
Recomendación: El cálculo debería realizarse a través del plugin y los parámetros ser aceptados o
exportados desde él.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 285
DGCI: Distancia entre carro y carro adicional KL (DGCI: Distance between slide and additional slide KL)
Parám. PNU: 1104 Índice: 6 Índice máx.: 6 Clase: Struct Tipo de datos: int32
Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Para los actuadores lineales no hay carros
adicionales disponibles
Métrico 0,01 mm 0 0 202�000
Imperial 0,001 mm 0 0 759�528
En combinación con el carro adicional KL en el DGCI, este valor define la distancia entre el carro
estándar y el carro adicional KL. Con ayuda de este valor el plugin calcula la posición final superior
por software mínima permitida, que evita que el carro se desplace hacia el tope superior a velocidad
demasiado alta.
En la parametrización a través del control, el programador del control debe determinar él mismo las
posiciones finales por software. Cálculo � Sección B.2.5.
Recomendación: El cálculo debería realizarse a través del plugin y los parámetros ser aceptados o
exportados desde él.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Tipo de sistema de medición de recorrido (Displacement encoder)
Parám. PNU: 1110 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 1 Máximo: 4
El tipo de sistema de medición se lee, en la medida de lo posible, en el sistema de medición de
recorrido o en la conexión de sensores. Si el sistema de medición de recorrido o la conexión de
sensores no proporciona ningún tipo conocido, se emite un error E04. El sistema de medición de
recorrido o la conexión de sensores no se pone en funcionamiento en este caso.
ID Tipo
0 Desconocido
1 Digital – DGCI, DDLI
2 Digital – MME (también para el eje definido por el usuario DGPI)
3 Potenciómetro
4 Incremental� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
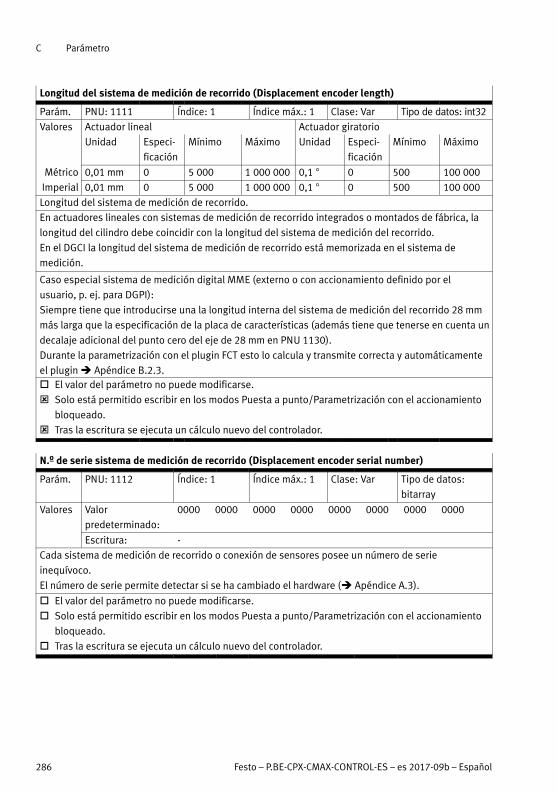
C Parámetro
286 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Longitud del sistema de medición de recorrido (Displacement encoder length)
Parám. PNU: 1111 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,01 mm 0 5�000 1�000�000 0,1 0 500 100�000
Imperial 0,01 mm 0 5�000 1�000�000 0,1 0 500 100�000
Longitud del sistema de medición de recorrido.
En actuadores lineales con sistemas de medición de recorrido integrados o montados de fábrica, la
longitud del cilindro debe coincidir con la longitud del sistema de medición del recorrido.
En el DGCI la longitud del sistema de medición de recorrido está memorizada en el sistema de
medición.
Caso especial sistema de medición digital MME (externo o con accionamiento definido por el
usuario, p. ej. para DGPI):
Siempre tiene que introducirse una la longitud interna del sistema de medición del recorrido 28 mm
más larga que la especificación de la placa de características (además tiene que tenerse en cuenta un
decalaje adicional del punto cero del eje de 28 mm en PNU 1130).
Durante la parametrización con el plugin FCT esto lo calcula y transmite correcta y automáticamente
el plugin � Apéndice B.2.3.� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
N.º de serie sistema de medición de recorrido (Displacement encoder serial number)
Parám. PNU: 1112 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos:
bitarray
Valores Valor
predeterminado:
0000 0000 0000 0000 0000 0000 0000 0000
Escritura: -
Cada sistema de medición de recorrido o conexión de sensores posee un número de serie
inequívoco.
El número de serie permite detectar si se ha cambiado el hardware (� Apéndice A.3).
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 287
Válvula (Valve)
Parám. PNU: 1120 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32Valores Valor predeterminado: 0 Mínimo: 1 Máximo: 5El tipo de válvula se lee en la válvula. El tipo se detecta siempre. Si la válvula no reconoce ningúntipo, se genera un error E04. La válvula no se pone en funcionamiento en este caso.ID Tipo de válvula0 Sin configurar1 Reservado2 VPWP-43 VPWP-64 VPWP-85 VPWP-10� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
N.º de serie de válvula (Valve serial number)
Parám. PNU: 1121 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos:bitarray
Valores Valorpredeterminado:
0000 0000 0000 0000 0000 0000 0000 0000
Escritura: -Todas las válvulas poseen un número de serie inequívoco.El número de serie es importante para detectar si se ha cambiado el hardware (� Apéndice A.3).� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Válvula 2 (Valve 2)
Parám. PNU: 1125 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32Valores Valor predeterminado: 0 Mínimo: 1 Máximo: 5Reservado� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
N.º de serie de válvula 2 (Valve 2 serial number)
Parám. PNU: 1126 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos:bitarray
Valores Valorpredeterminado:
0000 0000 0000 0000 0000 0000 0000 0000
Reservado� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
288 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
C.2.12 Ajustes de aplicación
Decalaje del punto cero del eje (Offset axis zero point)
Parám. PNU: 1130 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,01 mm 0 -1�000�000 1�000�000 0,1 100 -100�000 100�000
Imperial 0,001 in 0 -393�701 393�701 0,1 100 -100�000 100�000
Diferencia entre el punto cero del eje (Axis Zero Point, AZ) y la posición de referencia (Homing
position, REF) o diferencia entre el punto cero del eje (AZ) y el punto cero del sistema de medición de
recorrido (Measuring system Zero Point SZ) � Apéndice B.2.
El punto cero del eje debe fijarse en el punto cero del cilindro en el caso de accionamientos
servoneumáticos. En DGCI/DDLI, el sistema de medición de recorrido ya está calibrado y no está
permitido especificar un decalaje.
Caso especial sistema de medición digital MME (externo o con accionamiento definido por el
usuario, p. ej. para DGPI):
Siempre tiene que tenerse en cuenta un decalaje adicional del punto cero del eje de 28 mm (además
en PNU 1111 debe especificarse siempre una longitud interna del sistema de medición 28 mm más
larga que la especificación de la placa de características).
Durante la parametrización con el plugin FCT esto lo calcula y transmite correcta y automáticamente
el plugin � Apéndice B.2.3.� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Método de recorrido de referencia (Homing method)
Parám. PNU: 1131 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Valor predeterminado: -17 Mínimo: -128 Máximo: 127
Define el método con el que el accionamiento realiza el recorrido de referencia (� Sección 3.2.2).
Solo están permitidos los valores mencionados.
hex dec Descripción
23h 35 Aceptar la posición real actual como posición de referencia
EFh -17 Búsqueda del tope negativo
EEh -18 Búsqueda del tope positivo� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 289
Velocidad de recorrido de referencia (Homing velocity)
Parám. PNU: 1132 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,001 m/s 50 10 200 1 /s 50 10 200
Imperial 0,01 ft/s 15 3 66 1 /s 50 10 200
Velocidad a la que el accionamiento busca el tope en el recorrido de referencia.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Timeout de recorrido de referencia (Homing timeout)
Parám. PNU: 1133 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Parámetro interno.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Carga útil de recorrido de referencia (Homing payload)
Parám. PNU: 1134 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,1 kg 0 0 200�000 1 kg cm2 0 0 20�000
Imperial 1 lb 0 0 44�093 0,1 lb in2 0 0 68�343
Consideración de una carga útil específica en el recorrido de referencia.
Solo es efectivo cuando se desactiva la utilización del valor predeterminado global (valor
predeterminado de deceleración, PNU 605) con PNU 521:04.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
290 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Posición de montaje (Mounting orientation)
Parám. PNU: 1140 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,1 0 -900 900 0,1 0 -900 900
Imperial 0,1 0 -900 900 0,1 0 -900 900
Posición de montaje del accionamiento.
– Actuadores lineales/actuadores con vástago: Una indicación de -90 a -0,1 significa que el
punto cero del sistema de medición de recorrido está arriba y que el accionamiento se desplaza
hacia abajo en dirección a posiciones mayores. En valores de 0,1 a 90 el punto cero del sistema
de medición de recorrido está abajo y el actuador se desplaza hacia arriba.
– Actuadores giratorios:
– 0°: El eje señala hacia arriba.
– ±90°: El eje señala en dirección horizontal.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Presión de alimentación (Supply pressure)
Parám. PNU: 1141 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,1 bar 60 30 100 0,1 bar 60 30 100
Imperial 1 psi 85 44 145 1 psi 85 44 145
Presión de alimentación existente en la válvula.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
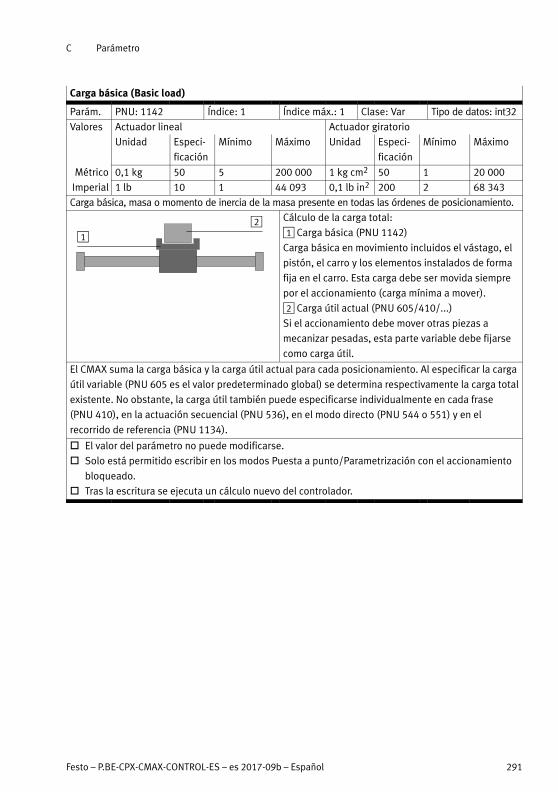
C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 291
Carga básica (Basic load)
Parám. PNU: 1142 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,1 kg 50 5 200�000 1 kg cm2 50 1 20�000
Imperial 1 lb 10 1 44�093 0,1 lb in2 200 2 68�343
Carga básica, masa o momento de inercia de la masa presente en todas las órdenes de posicionamiento.
1
2 Cálculo de la carga total:
1 Carga básica (PNU 1142)
Carga básica en movimiento incluidos el vástago, el
pistón, el carro y los elementos instalados de forma
fija en el carro. Esta carga debe ser movida siempre
por el accionamiento (carga mínima a mover).
2 Carga útil actual (PNU 605/410/...)
Si el accionamiento debe mover otras piezas a
mecanizar pesadas, esta parte variable debe fijarse
como carga útil.
El CMAX suma la carga básica y la carga útil actual para cada posicionamiento. Al especificar la carga
útil variable (PNU 605 es el valor predeterminado global) se determina respectivamente la carga total
existente. No obstante, la carga útil también puede especificarse individualmente en cada frase
(PNU 410), en la actuación secuencial (PNU 536), en el modo directo (PNU 544 o 551) y en el
recorrido de referencia (PNU 1134).
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
292 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Carga útil cargada al conectar (Payload at power-on)
Parám. PNU: 1143 Índice: 1 Índice máx.: 4 Clase: Var Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 1
Al habilitar el controlador (accionamiento habilitado) se utiliza siempre la última carga útil empleada.
En el primer desbloqueo tras la conexión no suele haber una pieza a mecanizar cargada, por ello el
CMAX solo tiene en cuenta la masa básica (PNU 1142). Con este parámetro se determina si la carga
útil también debe tenerse en cuenta al conectar.
Valor Significado
0 Pieza a mecanizar no cargada en la conexión.
La pieza a mecanizar se añade durante el funcionamiento.
1 La pieza a mecanizar ya se encuentra en el dispositivo de carga al conectar
Nota: En cada orden de posicionamiento se utiliza el valor predeterminado (PNU 605) o el valor del
parámetro individual (PNU 410, 536, 544, 551, 1134) para la carga útil en el controlador. En cuanto
se efectúa correctamente el primer posicionamiento tras la conexión, el parámetro se desactiva.� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Diseño de eje doble (Dual axis design)
Parám. PNU: 1143 Índice: 2 Índice máx.: 4 Clase: Var Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 1
Permite configurar un eje doble.
En caso de un eje doble, dos cilindros paralelos se acoplan mecánicamente y se controlan juntos
mediante una válvula para obtener una fuerza mayor. El segundo cilindro no tiene ningún sistema de
medición propio. Al activar esta opción se calcula automáticamente la superficie mayor del émbolo
de CMAX y no es necesario que la introduzca el usuario.
Los dos cilindros deben tener el mismo diámetro y la misma carrera.
Valor Significado
0 Diseño como eje individual
1 Diseño como eje doble� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
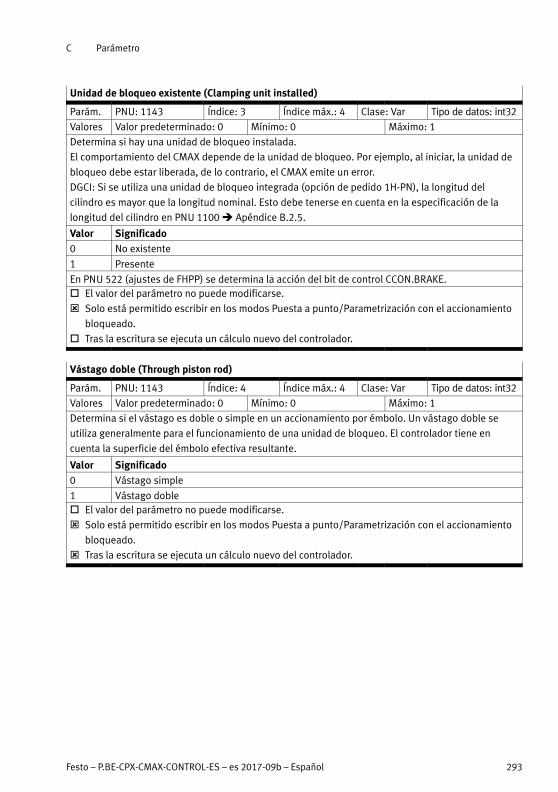
C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 293
Unidad de bloqueo existente (Clamping unit installed)
Parám. PNU: 1143 Índice: 3 Índice máx.: 4 Clase: Var Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 1
Determina si hay una unidad de bloqueo instalada.
El comportamiento del CMAX depende de la unidad de bloqueo. Por ejemplo, al iniciar, la unidad de
bloqueo debe estar liberada, de lo contrario, el CMAX emite un error.
DGCI: Si se utiliza una unidad de bloqueo integrada (opción de pedido 1HPN), la longitud del
cilindro es mayor que la longitud nominal. Esto debe tenerse en cuenta en la especificación de la
longitud del cilindro en PNU 1100 � Apéndice B.2.5.
Valor Significado
0 No existente
1 Presente
En PNU 522 (ajustes de FHPP) se determina la acción del bit de control CCON.BRAKE.� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Vástago doble (Through piston rod)
Parám. PNU: 1143 Índice: 4 Índice máx.: 4 Clase: Var Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 1
Determina si el vástago es doble o simple en un accionamiento por émbolo. Un vástago doble se
utiliza generalmente para el funcionamiento de una unidad de bloqueo. El controlador tiene en
cuenta la superficie del émbolo efectiva resultante.
Valor Significado
0 Vástago simple
1 Vástago doble� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
294 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Retardo de respuesta E50 (Response delay)
Parám. PNU: 1144 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 1
El retardo de respuesta para E50 define el tiempo máximo que espera el CMAX durante la monitorización
de la presión antes de emitir el error E50 cuando la presión es demasiado baja � A.3.7.
Valor Tiempo máximo para 1ª subida depresión de 100 mbar
Tiempo máximo para alcanzar la presión mínima
0 0,1 s (valor predeterminado) 1,0 s
1 0,5 s 2,0 s
2 1,0 s 5,0 s
3 5,0 s 20,0 s
4 10,0 s 40,0 s
5 20,0 s 100,0 s
6 30,0 s 300,0 s� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Bit de vida tiempo de intervalo (Sign of life interval time)
Parám. PNU: 1145 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos:
int32
Valores Actuador lineal Actuador giratorio
Unidad Valor
prede
termi
nado
Mínimo Máximo Unidad Valor
prede
termi
nado
Mínimo Máximo
Métrico 1 ms 0 0 20000 1 ms 0 0 20000
Imperial 1 ms 0 0 20000 1 ms 0 0 20000
Con el bit de vida SPOS.LIFE una unidad de control de nivel superior puede comprobar la accesibi
lidad y funcionamiento del CMAX � 3.1.11.
Con un tiempo de intervalo ajustado de 0 (desactivado), SPOS.LIFE se establece en 0 de forma per
manente.
Al escribir el tiempo de intervalo se redondea automáticamente a los siguientes 100 ms.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se realiza un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 295
C.2.13 Controlador de posición
Factor de amplificación controlador de posición (Position control gain factor)
Parám. PNU: 1150 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,01 100 10 1�000 0,01 100 10 1�000
Imperial 0,01 100 10 1�000 0,01 100 10 1�000
Factor de amplificación del controlador de posición � Apéndice B.5.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Factor de amortiguación controlador de posición (Position control damping factor)
Parám. PNU: 1151 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,01 100 10 1�000 0,01 100 10 1�000
Imperial 0,01 100 10 1�000 0,01 100 10 1�000
Factor de amortiguación del controlador de posición � Apéndice B.5.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Factor de filtro del controlador de posición (Position control filter factor)
Parám. PNU: 1152 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,01 100 10 1�000 0,01 100 10 1�000
Imperial 0,01 100 10 1�000 0,01 100 10 1�000
Factor de filtro del controlador de posición � Apéndice B.5.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
296 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Timeout controlador de posición (Position control timeout)
Parám. PNU: 1153 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 1 ms 2�000 0 100�000 1 ms 2�000 0 100�000
Imperial 1 ms 2�000 0 100�000 1 ms 2�000 0 100�000
El timeout de posicionamiento define el tiempo en el cual la posición real tiene que haber alcanzadoel valor objetivo. El tiempo de posicionamiento absoluto depende de la carrera, de la aceleraciónnominal y de la velocidad nominal. Por ello el tiempo de supervisión no puede supervisar la duraciónde la orden de posicionamiento completa. En lugar de eso se supervisa el comportamiento de inicioy fin de la curva de valor nominal.– Al iniciarse la curva de valor nominal, el eje debe moverse un mínimo de 11 mm dentro del
tiempo de timeout, de lo contrario, el CMAX emite el error E31 (no hay movimiento tras el inicio)– Tras finalizar la curva de valor nominal, la posición real tiene que haber alcanzado el margen de
posición de destino (y en caso de parada precisa también la condición de velocidad), de locontrario el CMAX emite el error E30 (timeout: Valor objetivo no alcanzado)
Importante:La desactivación del parámetro Timeout de posicionamiento puede causar que una frase deposicionamiento no finalice con MC y permanezca activa, p. ej.:– si el accionamiento se para antes de la posición nominal (debido a un obstáculo),– si el accionamiento no alcanza la posición nominal (depende de la tolerancia predeterminada).
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Tiempo de supervisión para parada precisa del controlador de posición (Position Control monitoring time for exact stop)
Parám. PNU: 1154 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especificación
Mínimo Máximo Unidad Especificación
Mínimo Máximo
Métrico 1 ms 30 10 1�000 1 ms 30 10 1�000
Imperial 1 ms 30 10 1�000 1 ms 30 10 1�000
Intervalo de tiempo que el valor efectivo debe permanecer sin interrupciones dentro del margen detolerancia antes de generarse el MC. Solo efectivo en caso de parada precisa, en caso de paradarápida no tiene función � Sección 3.1.6.Si el tiempo es demasiado breve, puede suceder que un desbordamiento cause un MC, pero que laposición real vuelva a salir a continuación del margen de tolerancia. Si el tiempo es demasiado largo,el tiempo de posicionamiento se prolonga de manera innecesaria. En el caso de accionamientosgrandes es recomendable seleccionar un tiempo un poco mayor.
� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 297
Desactivar regulación de reposo (Deactivate Standstill Control)
Parám. PNU: 1155 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 1
Con este parámetro se determina si entre los procedimientos de posicionamiento se activa la
regulación de reposo o no.
Valor Significado
0 La regulación de reposo se activa en el estado de parada
1 La regulación de reposo no se activa nunca� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
298 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
C.2.14 Controlador de fuerza
Factor de amplificación controlador de fuerza (Force control gain factor)
Parám. PNU: 1160 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio1)
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,01 100 10 1�000 0,01 100 10 1�000
Imperial 0,01 100 10 1�000 0,01 100 10 1�000
Factor de amplificación controlador de fuerza � Apéndice B.5.3.1) En los actuadores giratorios no está permitida la regulación de fuerza. Sin embargo, el parámetro se utiliza para la regulación de
reposo.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Amplificación dinámica controlador de fuerza (Force control dynamic gain)
Parám. PNU: 1161 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio1)
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,01 100 10 1�000 0,01 100 10 1�000
Imperial 0,01 100 10 1�000 0,01 100 10 1�000
Amplificación dinámica del controlador de fuerza � Apéndice B.5.3.1) En los actuadores giratorios no está permitida la regulación de fuerza. Sin embargo, el parámetro se utiliza para la regulación de
reposo.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Factor de filtro controlador de fuerza (Force control filter factor)
Parám. PNU: 1162 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio1)
Unidad Especi
ficación
Mínimo Máximo Unidad Especi
ficación
Mínimo Máximo
Métrico 0,01 100 10 1�000 0,01 100 10 1�000
Imperial 0,01 100 10 1�000 0,01 100 10 1�000
Factor de filtro del controlador de fuerza � Apéndice B.5.3.1) En los actuadores giratorios no está permitida la regulación de fuerza. Sin embargo, el parámetro se utiliza para la regulación de reposo.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 299
Timeout controlador de fuerza (Force control timeout)
Parám. PNU: 1163 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo En los actuadores giratorios no está
permitida la regulación de fuerza.
Métrico 1 ms 2�000 0 100�000
Imperial 1 ms 2�000 0 100�000
Intervalo de tiempo dentro del que la posición real debe alcanzar el margen de tolerancia una vez
que la rampa de fuerza ha alcanzado el valor marcado como objetivo. Esto significa que el tiempo
empieza a contar al finalizar el generador de valores nominales.
Si el tiempo se ajusta a 0, la supervisión no se ejecuta.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Tiempo supervisión parada precisa controlador de fuerza (Force control monitoring time for exact stop)
Parám. PNU: 1164 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Actuador lineal Actuador giratorio
Unidad Especi
ficación
Mínimo Máximo En los actuadores giratorios no está
permitida la regulación de fuerza.
Métrico 1 ms 100 10 1�000
Imperial 1 ms 100 10 1�000
Intervalo de tiempo que el valor efectivo debe permanecer sin interrupciones dentro del margen de
tolerancia antes de generarse el MC. Solo efectivo en caso de parada precisa, en caso de parada
rápida no tiene función � Sección 3.1.6.
Si el tiempo es demasiado breve, puede suceder que un desbordamiento cause un MC, pero que la
fuerza real vuelva a salir a continuación del margen de tolerancia. Si el tiempo es demasiado largo, el
tiempo de posicionamiento se prolonga de manera innecesaria. En el caso de accionamientos
grandes es recomendable seleccionar un tiempo un poco mayor.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
300 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
C.2.15 Identificación
Ajustes de identificación (Identification settings)
Parám. PNU: 1170 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 1Con este parámetro pueden efectuarse determinados ajustes que afectan a la identificación.= 0: En la identificación se permiten aceleraciones altas= 1: Ejecutar solo la identificación estática (aceleraciones bajas)� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Estado de identificación (Identification status)
Parám. PNU: 1171 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos:bitarray
Valores Valorpredeterminado:
0000 0000 0000 0000 0000 0000 0000 0000
Escritura: -Estado actual conforme a la última identificación ejecutada.Bit Valor Descripción0 = 0: Todavía no se ha ejecutado la identificación.
= 1: La identificación se ha ejecutado una vez como mínimo.1 = 0: No hay resultados de la identificación estática.
= 1: Identificación estática ejecutada correctamente.2 = 0: No hay resultados de la identificación dinámica.
= 1: Identificación dinámica realizada correctamente.� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Valores medios identificados (Identified average values)
Parám. PNU: 1172 Índice: 1 Índice máx.: 6 Clase: Array Tipo de datos: int32Valores Valor predeterminado: 0 Mínimo: - Máximo: -Valores medios determinados en la identificación para el perfil libre.Índice Valor Sentido del movimiento1 Aceleración Positivo2 Deceleración Positivo3 Reservado –4 Aceleración Negativo5 Deceleración Negativo6 Reservado –� El valor del parámetro no puede modificarse.� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 301
Valores de limitación (Limit values)
Parám. PNU: 1173 Índice: 1 Índice máx.: 14 Clase: Array Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: - Máximo: -
Información acerca de la limitación en la última carrera de posicionamiento ejecutada � Sección 3.1.10.
Índice Valor
1 Palabra de estado1)
2 Posición inicial (valor efectivo)
3 Posición de destino
4 Aceleración nominal
5 Valor máximo aceleración
6 Deceleración nominal
7 Valor máx. deceleración
8 Velocidad nominal
9 Valor máximo velocidad
10 Fuerza nominal
11 Valor máximo fuerza
12 Valor nominal de rampa de fuerza
13 Valor máximo rampa de fuerza
14 Fuerza inicial
Asignación palabra (índice 1)
Bit Información de estado
0 = 1: Hay valores nuevos
1 = 1: Se ha limitado la aceleración
2 = 1: Se ha limitado la deceleración
3 = 1: Se ha limitado la velocidad
4 = 1: Se ha limitado el valor nominal de fuerza
5 = 1: Se ha limitado la rampa de fuerza
6 ... 15 Reservado
16 ... 23 En modo de frase: Número de la última frase ejecutada.
24 = 0: Modo de frase
= 1: Modo directo
25 = 0: Valor nominal de posición
= 1: Valor nominal de fuerza
26 = 0: Perfil libre
= 1: Perfil automático
27 ... 31 Reservado1) La palabra de estado se utiliza como handshake entre el CMAX y el FCT. En cuanto el controlador activa el bit 0, los datos ya no
pueden sobrescribirse. De este modo, el FCT puede leer los datos de manera consistente. Después de leer, el FCT escribe un 0 enla palabra de estado a modo de confirmación y el controlador vuelve a actualizar los valores. La palabra de estado (índice 1)puede escribirse sin control de nivel superior del FCT. Tampoco es necesario introducir una palabra clave.
� El valor del parámetro no puede modificarse (excepto el índice 1).� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
302 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Estado de la prueba de movimiento (Status movement test)
Parám. PNU: 1174 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos:
bitarray
Valores Valor
predeterminado:
0000 0000 0000 0000 0000 0000 0000 0000
Escritura: -
Estado actual de la prueba de movimiento.
Bit Valor Descripción
0 = 0: Debe realizarse una prueba de movimiento
= 1: No es necesario realizar una prueba de movimiento
1 = 0: Prueba de movimiento no ejecutada
= 1: Prueba de movimiento ejecutada
2 = 0: La prueba de movimiento da resultados equívocos
= 1: La prueba de movimiento da resultados inequívocos
3 = 0: Error en la conexión de los tubos
= 1: Conexionado de tubos correcto
4 = 0: Prueba de movimiento no ignorada
= 1: Prueba de movimiento ignorada
5 = 0: No hay cambio de hardware
= 1: La prueba de movimiento se ha repuesto después de cambiar el hardware
Información sobre la prueba de movimiento � Sección 3.2.1.
Mientras haya que ejecutar la prueba de movimiento (bit 0 = 0), el controlador no se desbloquea.
Con SCON.ENABLED = 1 solo hay una habilitación de movimiento para la prueba, la válvula solo se
hace funcionar de manera controlada.
Con un flanco de inicio para otra orden de posicionamiento que no sea la prueba de movimiento, se
emite el fallo E14 “Prueba de movimiento no ejecutada”.
El FCT indica el estado “Prueba de movimiento” en “Datos ampliados”. El LED se pone en verde
cuando el valor de parámetro adopta el estado xxx0 1111b.
Si se ha cambiado el hardware, el CMAX repone automáticamente la prueba de movimiento. La
operación es irreversible. Ejemplo: Sustitución de la válvula y restitución de la válvula original.
Con PNU 1192:07 es posible omitir la prueba de movimiento o reponer el estado.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 303
Bloquear adaptación (Disable adaptation)
Parám. PNU: 1175 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 1
Con este parámetro puede desactivarse la adaptación. Por lo general, esto no es necesario en
ninguna configuración ya que la adaptación empeora el comportamiento de posicionamiento muy
raramente. La adaptación es útil es la mayor parte de los casos. La adaptación mejora la precisión
alcanzable absoluta del accionamiento.
No siempre que el comportamiento de posicionamiento empeora se debe a una adaptación errónea
� Sección 3.2.4.
Valores:
= 0: Se ejecuta la adaptación
= 1: La adaptación está bloqueada� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Decalaje y valores de histéresis del accionamiento (Offset and hysteresis values of the drive)
Parám. PNU: 1176 Índice: 1 Índice máx.: 16 Clase: Array Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: - Máximo: -
Parámetro interno.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
304 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
C.2.16 Datos del sistema
Configuración actual de hardware (Actual hardware configuration)
Parám. PNU: 1190 Índice: 1 Índice máx.: 33 Clase: Struct Tipo de datos:
int32/bitarray
Valores Valor predeterminado: 0 Mínimo: - Máximo: -
Configuración de hardware detectada al conectar (configuración actual).
Un valor 0 significa que el parámetro no ha podido detectarse automáticamente.
A continuación se presentan los PNU correspondientes de la configuración nominal para su comparación.
Índice Valor Valor de la configuración nominal
Cilindro
1 Tipo de cilindro PNU 1100
2 Longitud de tubo PNU 1101
3 Diámetro PNU 1102
4 Diámetro del vástago PNU 1103
5 Largo PNU 1101
6 ... 9 Reservado –
Sistema de medición de recorrido
10 Tipo de sistema de medición de
recorrido
PNU 1110
11 Largo PNU 1111
12 Número de serie PNU 1112
13 Resolución (μm) –
14 tiempo de detección (μs) –
15 Información adicional
� Sección B.2.5
–
16 Versión de firmware –
17 ... 19 Reservado –
Válvula
20 Tipo de válvula PNU 1120
21 Número de serie PNU 1121
22 Versión de firmware –
23 Versión de hardware –
24 ... 33 Reservado –� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 305
Indicaciones acerca de PNU 1190:– Comportamiento en el estado de entrega o tras restablecer los datos del eje o del equipo: La
configuración detectada no se acepta automáticamente en la configuración nominal. En su lugar, la
configuración nominal se rellena con 0. La configuración nominal escrita tiene que ser compatible
con la configuración actual.
– Comportamiento con inicio normal: Si el hardware detectado no coincide con la configuración
nominal, se inicia un tratamiento de errores. Se decide si el cambio debe generar una advertencia o
un error. En ciertos casos no se activa el controlador.
– Si una identificación se ejecuta correctamente, los números de serie se aceptan de manera que la
advertencia W08 (el cilindro, la válvula o la conexión de sensores se han cambiado) no aparece en
la próxima conexión.
– La interface de sensor no permite utilizar el diámetro del vástago. La configuración actual contiene
siempre el valor 0. Como este es un valor válido para los actuadores sin vástago, en el caso del
diámetro del vástago, el valor 0 no se considera “No detectado”. Por ello, en la próxima conexión
tampoco se realiza una prueba de valor nominal-efectivo.
Datos de análisis (Analysis data)
Parám. PNU: 1191 Índice: 1 Índice máx.: 15 Clase: Array Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: - Máximo: -
Datos internos para evaluar la regulación.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
306 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Función de puesta a punto Descarga de bloques de datos(Commissioning function block download)
Parám. PNU: 1192 Índice: 1 Índice máx.: 7 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 1
Después de escribir un parámetro se inicializa un controlador. En esta operación se comprueba si
determinados parámetros son compatibles, p.ej., si la posición final inferior por software es menor
que la superior. Si se detecta un error, se genera un mensaje de error y el CMAX cambia al estado
“Error”.
Esta prueba puede desconectarse temporalmente al activar la descarga de bloques de datos. El
controlador no comprueba los datos hasta que finaliza la descarga de bloques.
Escritura Lectura
= 1: Iniciar descarga de bloques de datos = 1: Descarga de bloques de datos activa
= 0: Terminar descarga de bloques de
datos
= 0: Descarga de bloques de datos no activa
El cálculo nuevo del controlador se ejecuta después de escribir Descarga de bloques de datos = 0
(terminar la descarga de bloques de datos). Durante la descarga de bloques de datos debería
desactivarse el controlador.
No puede ejecutarse ningún arranque mientras la descarga de bloques de datos está activa. La
activación de la descarga de bloques de datos termina, a más tardar, al desconectarse el CMAX. En
este caso, el cálculo nuevo del controlador se efectúa en la próxima conexión.� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Función de puesta a punto Estado de configuración (Commissioning Function configuration status)
Parám. PNU: 1192 Índice: 2 Índice máx.: 7 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 4
En la puesta a punto debe transmitirse un número determinado de parámetros en un orden concreto.
Este parámetro informa acerca del estado de la parametrización y, por tanto, también del paso que
debe efectuarse a continuación en la puesta a punto.
Valores posibles de retorno Display
= 0: En espera del sistema de medida C00
= 1: En espera del tipo de cilindro C01
= 2: En espera de los datos de eje C02
= 3: En espera de la prueba de movimiento C03
= 4: Configuración de los ejes finalizada Depende del estado operativo respectivo� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 307
Función de puesta a punto Reset de datos (Commissioning function data reset)
Parám. PNU: 1192 Índice: 3 Índice máx.: 7 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 3
Un reset de datos se utiliza para restablecer al estado de fábrica todos los parámetros del CMAX o
parte de ellos. Esto resulta conveniente siempre que se hayan modificado piezas del accionamiento
o de la instalación y sea necesario adaptar la configuración. Dependiendo de la magnitud de la
modificación son apropiados diferentes resets.
= 0: Sin efecto
= 1: Reservado
= 2: Borrar datos de identificación
= 3: Borrar datos de eje y de identificación
Más información:
� A.3.3 Modificar la configuración nominal
� A.3.4 Reset de datos� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Función de puesta a punto Estado de palabra clave (Commissioning function password status)
Parám. PNU: 1192 Índice: 4 Índice máx.: 7 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 2
PNU 130 contiene una palabra clave. El parámetro PNU 1192:04 controla la recepción y emite el
estado actual.
Escritura Lectura
= 0: Borrar palabra clave = 0: No hay ninguna palabra clave activada
= 1: Aceptar palabra clave = 1: Palabra clave activada y acceso libre
= 2: Palabra clave activada y acceso bloqueado
Tras la aceptación correcta, cada vez que se establece una conexión a través de la interface de
diagnosis debe escribirse la palabra clave para poder cambiar parámetros.
Secuencia:
1. Escribir PNU 130: = “Mi palabra clave”
2. Escribir PNU 1192:04 = 1 para aceptar
Para cambiarla es necesario introducir primero la palabra clave antigua y después borrarla. A
continuación puede introducirse y registrarse la palabra nueva.� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
308 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Función de puesta a punto Sistema de medida (Commissioning function system of measurement)
Parám. PNU: 1192 Índice: 5 Índice máx.: 7 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 2
El sistema de medida debe determinarse al principio de la parametrización. seleccionando entre el
sistema métrico o el imperial.
Ningún parámetro a partir de PNU 300 puede leerse ni escribirse mientras este índice tenga el valor
0 y la tabla del sistema de medida no esté determinada.
Escritura Lectura
= 0: No admisible: = 0: Sin configurar
= 1: Métrico / SI = 1: Métrico / SI
= 2: Imperial / EEUU = 2: Imperial / EEUU
No es posible cambiar de sistema de medida (de 1 a 2 o de 2 a 1). Para cambiar, es necesario
restablecer primero los datos de eje (PNU 1192:03).� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Función de la puesta a punto Tabla del sistema de medida (Commissioning function system of measurement table)
Parám. PNU: 1192 Índice: 6 Índice máx.: 7 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 4
La tabla del sistema de medida se corresponde con la tabla seleccionada conforme a � Apéndice B.1.
La tabla contiene la unidad utilizada para cada medida (milímetro o pulgada) y el escalado. La tabla de
sistema de medida se obtiene a partir del sistema de medida y del tipo de cilindro.
Ningún parámetro a partir de PNU 300 puede leerse ni escribirse mientras este índice tenga el valor 0
y la tabla del sistema de medida no esté determinada.
Lectura:
= 0: Sin configurar
= 1: Métrico / lineal � Apéndice B.1.1, Tab. B.2
= 2: Imperial / lineal � Apéndice B.1.1, Tab. B.4
= 3: Métrico / rotativo � Apéndice B.1.1, Tab. B.3
= 4: Imperial / rotativo � Apéndice B.1.1, Tab. B.5� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 309
Función de puesta a punto Estado de la prueba de movimiento (Commissioning function movement test status)
Parám. PNU: 1192 Índice: 7 Índice máx.: 7 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: 0 Máximo: 2
Determinación del estado de la prueba de movimiento.
Escritura:
= 1: La prueba de movimiento se repone y debe repetirse
= 2: La prueba de movimiento se activa a “Ejecución innecesaria” y se ignora
Lectura:
= 0: No es necesario realizar una prueba de movimiento
= 1: Debe realizarse una prueba de movimiento
Nota: PNU 1174:01 contiene el estado codificado en bits de la prueba de movimiento con la información
detallada (ignorado, ejecutado, etc.). El parámetro 1192:07 está pensado como opción a la reposición y
a la omisión de la prueba de movimiento y modifica el PNU 1174:01 al escribirse.� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Unidad del sistema de medida (System of measurement units)
Parám. PNU: 1193 Índice: 1 ... 12 Índice máx.: 12 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: - Máximo: -
Determina unidades físicas � Apéndice B.1.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Resolución del sistema de medida (System of measurement resolution)
Parám. PNU: 1194 Índice: 1 ... 12 Índice máx.: 12 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: - Máximo: -
Determina el escalado/resolución o el número de cifras decimales � Apéndice B.1.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
310 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Configuración de inicio (Start configuration)
Parám. PNU: 1195 Índice: 1 ... 5 Índice máx.: 5 Clase: Struct Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: - Máximo: -
La configuración de inicio contiene datos de configuración importantes del momento de la última
identificación. Después de la identificación la configuración actual solo puede modificarse dentro de
ciertos límites. Si es necesario modificar la configuración nominal fuera de dichos límites, primero
tienen que borrarse los datos de identificación. Después de adaptar la configuración nominal debe
ejecutarse una nueva identificación.
La sustitución de un componente se detecta mediante el nuevo número de serie. entonces el CMAX
genera la advertencia W08. Es necesario ejecutar una identificación. El nuevo número de serie se
acepta automáticamente.
Índice Valor Configuración nominal Tolerancia
1 Longitud de cilindro PNU 1101 5,00 mm
2 Longitud del sistema de medición
de recorrido
PNU 1111 5,00 mm
3 Reservado – –
4 Posición de montaje PNU 1140 3°
5 Presión de alimentación PNU 1141 1 bar
6 N.º de serie sistema de medición
de recorrido
PNU 1112 –
7 N.º de serie de válvula PNU 1121 –� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Configuración Trace: Versión máx. compatible (Trace configuration: max. supported version)
Parám. PNU: 1198 Índice: 1 Índice máx.: 1 Clase: Var Tipo de datos: int32
Valores Valor predeterminado: 4 Mínimo: - Máximo: -
Parámetro para el FCT.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.
Parámetro de fabricación (Manfacturing data)
Parám. PNU: 1199 Índice: 1 ... 7 Índice máx.: 7 Clase: Array Tipo de datos: int32
Valores Valor predeterminado: 0 Mínimo: - Máximo: -
Parámetro interno.
� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

C Parámetro
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 311
C.2.17 Textos de error
Texto de error E... (Errortext E...)
Parám. PNU: 2100 ... 2189 Índice: 1 ... 81 Índice máx.: 81 Clase: Array Tipo de datos: char
Valores Valor predeterminado: Texto correspondiente del error o la advertencia
Caracteres permitidos: 0x00, 0x20 ... 0xFF (caracteres ASCII imprimibles)Caracteres inadmisibles: 0x01 ... 0x19 (carácter de control)
Lectura de los textos de error y de advertencia. El idioma de los mismos se determina con PNU 154.
En caso de errores no definidos se emite “Error desconocido” (“Unknown Error”).
El control puede leer los caracteres de los textos de uno en uno hasta el carácter final 0x00. Esto
significa que un texto de error puede tener como máximo 80 caracteres.
PNU NOMBRE Valor (para PNU 154 = 0: Inglés)
2100 Texto de error E00 “No Error”
2101 Texto de error E01 “The nominal configuration deviates from actual configuration”
... Texto de error E... “...”
2189 Texto de error E89 “Faulty data contents in the displacement encoder or sensor interface”� El valor del parámetro no puede modificarse.
� Solo está permitido escribir en los modos Puesta a punto/Parametrización con el accionamiento
bloqueado.
� Tras la escritura se ejecuta un cálculo nuevo del controlador.

D Glosario
312 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
D GlosarioEn esta descripción se utilizan los siguientes términos y abreviaciones específicos del producto:
Término/abreviación Significado
0xA0 (A0h) Los números hexadecimales se identifican con el prefijo “0x” o con elsubíndice “h”.
Accionamiento En esta descripción se utiliza el término accionamiento para referirse alactuador lineal (DGCI, DDLI, DGP), al cilindro normalizado o accionamientopara posicionamiento (DNC, DNCI, DDPC, DNCM) o al actuador giratorio(DSMI).
Adaptación Función del CMAX que sirve para mejorar automáticamente uncomportamiento de ajuste no óptimo durante el funcionamiento.
Control de posición Modo de regulación en el que una posición definida se desplaza y se detienede forma controlada.
Festo ConfigurationTool (FCT)
Software con administración unificada de los datos y del proyecto para todoslos tipos de equipos compatibles. Para las demandas especiales de un tipode equipo determinado dispone de plugins con las descripciones y diálogosnecesarios.
Festo Handling andPositioning Profile(FHPP)
Perfil de equipo y de comunicación para controladores de posicionamientode Festo.
Festo ParameterChannel (FPC)
Acceso a parámetros específicos del FHPP
Frase Orden de posicionamiento, definida en la tabla de registros de posicionado,que incluye la posición de destino, el modo de posicionamiento, la velocidad,la aceleración, etc.
Funciones Funciones especiales de los distintos modos de funcionamiento, (p. ej.,operación por actuación secuencial, recorrido de referencia, ...).
I Entrada digital.Las salidas de estado del CMAX son datos de entrada del módulo desde laperspectiva de la unidad de control de nivel superior (� Sección 2.2).
Identificación Función del sistema que permite determinar características específicas deleje conectado mediante un recorrido de identificación, p. ej., las fuerzas dearranque, el comportamiento de fricción, la dinámica (aceleración yvelocidad máximas), etc.
I/O Entradas y salidas digitales
Modo defuncionamiento
Tipo de control, función o valor de referencia del CMAX.
Módulos CPX Término común para los diversos módulos que pueden incorporarse a unterminal CPX.
Nodos de bus Establecen la conexión con ciertos buses de campo. Transmiten señales decontrol a los módulos conectados y supervisan su disponibilidad parafuncionar (aquí como módulo CPX).
O Salida digital.Las entradas de control del CMAX son datos de salida del módulo desde laperspectiva de la unidad de control de nivel superior (� Sección 2.2).

D Glosario
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 313
Término/abreviación Significado
OB Byte de salida
Operación poractuación secuencial
Desplazamiento manual en sentido positivo o negativo.Función para ajustar las posiciones avanzando a la posición de destino, p. ej.,para programar frases por teach-in.
Parámetros Diferentes ajustes para el funcionamiento del sistema que deben guardarseen el CMAX.
PNU Número de parámetro. Cada parámetro tiene un número y un subíndice(� Capítulo C).Modo de escritura: PNU xxxx:zz (xxxx: Número de parámetro, zz: Subíndice).
Posición final porsoftware
Limitación programable de la carrera (punto de referencia = punto cero del eje)Posición final superior por software:Posición límite máxima en sentido positivo (valores reales en aumento).Posición final inferior por software:Posición límite mínima en sentido negativo (valores reales en disminución).
Punto cero delproyecto (PZ)
Punto de base de las mediciones para todas las posiciones en las órdenes deposicionamiento (Project Zero point). El punto cero del proyecto constituye labase para todas las indicaciones absolutas de posición (p. ej., en la tabla defrases o en el modo directo). El punto cero del eje es el punto de referenciapara el punto cero del proyecto.
Punto de referencia(REF)
Punto de base para el sistema de medición de recorrido incremental. Elpunto de referencia define una orientación o posición conocida dentro delrecorrido de posicionado del accionamiento.
Ramal de eje Totalidad de los módulos y cables conectados a través de la conexión de ejeal CMAX.
Recorrido dereferencia
Mediante el recorrido de referencia se define la posición de referencia y, enconsecuencia, también el origen del sistema de referencia de medida del eje.
Regulación de lapresión/fuerza
Modo de control en el que se genera una fuerza definida a través de unaregulación de la presión. En adelante se utiliza siempre el término“regulación de fuerza”.
Señal 0 La entrada o salida suministra 0 V (también LOW, FALSE o lógica 0).
Señal 1 La entrada o salida suministra 24 V (también HIGH, TRUE o lógica 1).
Sistema de mediciónde recorrido absoluto
Sistema de medición de recorrido con asignación fija (absoluta) del valormedido (posición, ángulo, etc.) y de la magnitud medida; en CMAX: “Digital”o “Potenciómetro”.
Sistema de mediciónde recorridoincremental
Sistema de medición del recorrido en el que la magnitud medida se refiere aun punto de referencia y se determina contando pasos de medición de iguallongitud (incrementos).
Terminal CPX Sistema completo consistente en módulos CPX con o sin neumática.
Tab. D.1 Términos y abreviaciones

Controlador de ejes CPX-CMAX
314 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Índice
224VL 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
AAbreviaciones específicas del producto 312. . . .
ABS 30, 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Absoluto 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Absoluto (sistema de medición de recorrido) 313
Accionamiento 312. . . . . . . . . . . . . . . . . . . . . . . .
ACK 25, 31, 36. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Actualización del firmware 176. . . . . . . . . . . . . . .
Adaptación 79, 312. . . . . . . . . . . . . . . . . . . . . . . .
Advertencias 103, 106. . . . . . . . . . . . . . . . . . . .
Amplificación dinámica 228. . . . . . . . . . . . . . . . .
Asistencia técnica 9. . . . . . . . . . . . . . . . . . . . . . .
BBit de vida 69. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bits de estado 139. . . . . . . . . . . . . . . . . . . . . . . .
BRAKE 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CCategorías de calidad 55. . . . . . . . . . . . . . . . . . .
CCON 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CDIR 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
COM1 26, 30, 32. . . . . . . . . . . . . . . . . . . . . . . . . .
COM2 30, 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Comparación nominal-real 171. . . . . . . . . . . . . . .
Comportamiento a la desconexión 176. . . . . . . .
Comportamiento al arranque 161, 176. . . . . . . .
Comportamiento de arranque del terminal CPX 12
Conmutación progresiva de frases 89. . . . . . . . .
Conmutación progresiva de frases condicional 89
CONT 30, 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Control de la tolerancia 64. . . . . . . . . . . . . . . . . .
Control de posición 44, 312. . . . . . . . . . . . . . . . .
Control del movimiento 63. . . . . . . . . . . . . . . . . .
CPOS 24, 29, 35. . . . . . . . . . . . . . . . . . . . . . . . . . .
Crear disponibilidad para funcionar 179. . . . . . .
DDatos de diagnosis del módulo
– Código de módulo 142. . . . . . . . . . . . . . . . . . .
– Código de revisión 142. . . . . . . . . . . . . . . . . . .
– Número del primer canal defectuoso 141. . . . .
– Números de error del módulo 141. . . . . . . . . .
Datos I/O 17. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Estructura de los datos cíclicos I/O 17. . . . . . .
Destinatarios 8. . . . . . . . . . . . . . . . . . . . . . . . . . .
DEV 25, 31, 36, 64. . . . . . . . . . . . . . . . . . . . . . . .
Diagnosis
– Mensajes 106. . . . . . . . . . . . . . . . . . . . . . . . . . .
– Opciones de diagnosis 102. . . . . . . . . . . . . . . .
– Visión general 102. . . . . . . . . . . . . . . . . . . . . . .
Diagramas de flujo 179. . . . . . . . . . . . . . . . . . . . .
EENABLE 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ENABLED 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Encadenamiento de frases 89. . . . . . . . . . . . . . . .
Error 103, 106. . . . . . . . . . . . . . . . . . . . . . . . . . .
– Confirmación de errores 183. . . . . . . . . . . . . . .
– Mensajes de error CPX 105. . . . . . . . . . . . . . . .
Especificación continua de valor nominal 100. . .
Estructura de la frase 88. . . . . . . . . . . . . . . . . . . .
Estructura de parámetros 229. . . . . . . . . . . . . . .
FFactor de amortiguación
– Definición 223. . . . . . . . . . . . . . . . . . . . . . . . . .
– Ejemplos 225, 226. . . . . . . . . . . . . . . . . . . . . .
Factor de amplificación
– Definición 222, 228. . . . . . . . . . . . . . . . . . . . .
– Ejemplos 225, 226. . . . . . . . . . . . . . . . . . . . . .
Factor de filtro
– Definición 223, 228. . . . . . . . . . . . . . . . . . . . .
– Ejemplos 225, 226. . . . . . . . . . . . . . . . . . . . . .
Factores del controlador
– Control de posición 222. . . . . . . . . . . . . . . . . . .
– Regulación de fuerza 228. . . . . . . . . . . . . . . . .
Fail state 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FAST 30, 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FAULT 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FCT 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

Controlador de ejes CPX-CMAX
Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español 315
Festo Configuration Tool (FCT) 312. . . . . . . . . . . .
Festo Handling and Positioning Profile 312. . . . .
Festo Parameter Channel (FPC) 152, 312. . . . . .
FHPP 312. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FHPP Standard 17. . . . . . . . . . . . . . . . . . . . . . . . .
Formato de datos 11. . . . . . . . . . . . . . . . . . . . . . .
Frase 312. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Freno 56. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Funcionamiento de seguimiento 100. . . . . . . . . .
Funciones 312. . . . . . . . . . . . . . . . . . . . . . . . . . . .
GGrupos (errores y advertencias) 105. . . . . . . . . .
HHOM 24, 29, 35. . . . . . . . . . . . . . . . . . . . . . . . . . .
I
Identificación 76, 312. . . . . . . . . . . . . . . . . . . . . .
Idle mode 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Incremental (sistema de medición de recorrido) . .
313
Iniciar frase 182. . . . . . . . . . . . . . . . . . . . . . . . . . .
Inicio de especificación continua de valor nominal
100
Inicio de una frase 86. . . . . . . . . . . . . . . . . . . . . .
Inicio de una orden de posicionamiento 98. . . . .
Interfaz de diagnosis I/O 141. . . . . . . . . . . . . . . .
– Memoria de diagnosis 139. . . . . . . . . . . . . . . .
JJOGN 24, 29, 35. . . . . . . . . . . . . . . . . . . . . . . . . . .
JOGP 24, 29, 35. . . . . . . . . . . . . . . . . . . . . . . . . . .
LLIFE 25, 31, 36. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Limitación 68. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
LOCK 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
M
Máquina de estado 41. . . . . . . . . . . . . . . . . . . . .
MC 25, 31, 36, 60. . . . . . . . . . . . . . . . . . . . . . . .
Memoria de diagnosis 127, 139. . . . . . . . . . . . .
Memoria de diagnosis CPX-MMI 139. . . . . . . . . .
Modo continuo 47. . . . . . . . . . . . . . . . . . . . . . . . .
Modo de frase 14, 85. . . . . . . . . . . . . . . . . . . . . .
– Datos I/O 22. . . . . . . . . . . . . . . . . . . . . . . . . . .
Modo de funcionamiento 14, 312. . . . . . . . . . . . .
– Conmutar 18, 184. . . . . . . . . . . . . . . . . . . . . . .
– Datos I/O 17. . . . . . . . . . . . . . . . . . . . . . . . . . .
– Funciones 16. . . . . . . . . . . . . . . . . . . . . . . . . . .
– Parametrización 15. . . . . . . . . . . . . . . . . . . . . .
– Puesta a punto 15. . . . . . . . . . . . . . . . . . . . . . .
– selección de tareas 14. . . . . . . . . . . . . . . . . . . .
– Tarea directa 14. . . . . . . . . . . . . . . . . . . . . . . . .
Modo de valor parcial 45, 46. . . . . . . . . . . . . . . . .
Modo directo 14, 96. . . . . . . . . . . . . . . . . . . . . . .
– Datos I/O 27. . . . . . . . . . . . . . . . . . . . . . . . . . .
Módulos CPX 312. . . . . . . . . . . . . . . . . . . . . . . . .
Motion Complete 60. . . . . . . . . . . . . . . . . . . . . . .
MOV 25, 31, 36, 63. . . . . . . . . . . . . . . . . . . . . . .
N
Nivel de fallo (errores y advertencias) 103. . . . . .
Nodo de bus CPX 10. . . . . . . . . . . . . . . . . . . . . . .
Notas sobre la documentación 8. . . . . . . . . . . . .
Números de error CPX 105. . . . . . . . . . . . . . . . . .
OOperación por actuación secuencial 80, 313. . . .
OPM1 - OPM2 20, 21. . . . . . . . . . . . . . . . . . . . . . .
Optimización del comportamiento de
desplazamiento 224. . . . . . . . . . . . . . . . . . . . .
Órdenes relativas 54. . . . . . . . . . . . . . . . . . . . . . .
P
Parada 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parametrización 15. . . . . . . . . . . . . . . . . . . . . . . .
– Cíclica 155. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Datos I/O 37. . . . . . . . . . . . . . . . . . . . . . . . . . .
Parametrización del CPX 12. . . . . . . . . . . . . . . . .
Parámetro 313. . . . . . . . . . . . . . . . . . . . . . . . . . .
Perfil automático 45. . . . . . . . . . . . . . . . . . . . . . .
PNU 313. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Posición final por software 213, 313. . . . . . . . .
Posiciones finales por hardware 213. . . . . . . . . .

Controlador de ejes CPX-CMAX
316 Festo – P.BE-CPX-CMAX-CONTROL-ES – es 2017-09b – Español
Programación 179. . . . . . . . . . . . . . . . . . . . . . . . .
Programación tipo teach-in 82. . . . . . . . . . . . . . .
Protección por palabra clave 143. . . . . . . . . . . . .
Prueba de movimiento 70. . . . . . . . . . . . . . . . . . .
Puesta a punto 15. . . . . . . . . . . . . . . . . . . . . . . . .
– Datos I/O 33. . . . . . . . . . . . . . . . . . . . . . . . . . .
– Unidad de control de nivel superior 13. . . . . . .
Puesta a punto a través de la unidad de control
de nivel superior 166. . . . . . . . . . . . . . . . . . . . .
Punto cero del proyecto 313. . . . . . . . . . . . . . . . .
RRamal de eje 313. . . . . . . . . . . . . . . . . . . . . . . . . .
RC1 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
RCC 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
RCE 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
READY 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Recorrido de referencia 73, 313. . . . . . . . . . . . . .
REF 25, 31, 36. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Referenciado - Punto de referencia 313. . . . . . . .
Regulación de fuerza 48, 313. . . . . . . . . . . . . . . .
Regulación de la presión 313. . . . . . . . . . . . . . . .
Regulación de reposo 55. . . . . . . . . . . . . . . . . . .
Relativo 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Reset 20, 175. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Reset de datos 175. . . . . . . . . . . . . . . . . . . . . . . .
Reset de los datos de eje 175. . . . . . . . . . . . . . . .
Reset de los datos de identificación 175. . . . . . .
Reset de los datos del equipo 175. . . . . . . . . . . .
Reset de prueba de movimiento 176. . . . . . . . . .
Retardo de respuesta 177. . . . . . . . . . . . . . . . . .
RSB 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SSCON 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SDIR 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Señal 0 313. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Señal 1 313. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Sistema de medición 203. . . . . . . . . . . . . . . . . . .
Sistema de medición de recorrido
– Absoluto 313. . . . . . . . . . . . . . . . . . . . . . . . . . .
– Incremental 313. . . . . . . . . . . . . . . . . . . . . . . . .
Sistema de referencia 208. . . . . . . . . . . . . . . . . .
SPOS 25, 31, 36. . . . . . . . . . . . . . . . . . . . . . . . . .
START 24, 29, 35. . . . . . . . . . . . . . . . . . . . . . . . . .
STILL 25, 31, 36, 66. . . . . . . . . . . . . . . . . . . . . . .
STOP 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Supervisión de detención 66. . . . . . . . . . . . . . . .
Supervisión de errores de seguimiento 64. . . . . .
T
TEACH 24, 25, 29, 31, 35, 36. . . . . . . . . . . . . . . .
Terminal CPX 313. . . . . . . . . . . . . . . . . . . . . . . . . .
Tipo de reset 104. . . . . . . . . . . . . . . . . . . . . . . . .
UUnidad de bloqueo 56. . . . . . . . . . . . . . . . . . . . . .
VValor de consigna 100. . . . . . . . . . . . . . . . . . . . . .
Valores predeterminados 147. . . . . . . . . . . . . . . .
Valores predeterminados globales 147. . . . . . . .
Versión de software CMAX 8. . . . . . . . . . . . . . . . .
Versiones 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Versiones de firmware 8, 185. . . . . . . . . . . . . . . .
Versiones de plugin 8, 194. . . . . . . . . . . . . . . . . .
VLIM 26, 30, 32. . . . . . . . . . . . . . . . . . . . . . . . . . .
WWARN 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
XXLIM 26, 30, 32. . . . . . . . . . . . . . . . . . . . . . . . . . .


Sin nuestra expresa autorización, queda terminantemente prohibidala reproducción total o parcial de este documento, así como su usoindebido y/o exhibición o comunicación a terceros. De los infractoresse exigirá el correspondiente resarcimiento de daños y perjuicios.Quedan reservados todos los derechos inherentes, en especial los depatentes, de modelos registrados y estéticos.
Copyright:Festo SE & Co. KGPostfach73726 EsslingenAlemania
Phone:+49 711 347-0
Fax:+49 711 347-2144
E-mail:[email protected]
Internet:www.festo.com