the research and engineering center for unmanned vehicles · the research and engineering center...
TRANSCRIPT
The Research and Engineering Center for Unmanned Vehicles

The Research and Engineering Center for Unmanned Vehicles

The Research and Engineering Center for Unmanned Vehicles
The Research and Engineering Center for Unmanned VehiclesThe Research and Engineering Center for Unmanned Vehicles
7 April 2010
Cooperative Mobile Sensing Systems
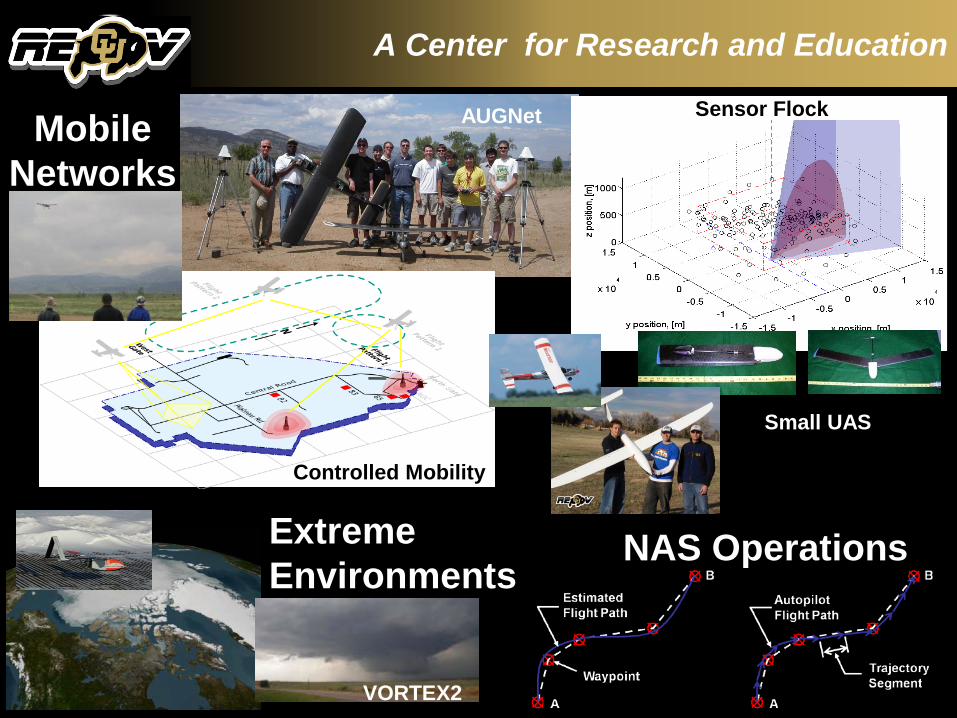
A Center for Research and Education
Sensor Flock
Controlled Mobility
MobileNetworks
Extreme Environments
Small UAS
NAS Operations
AUGNet
VORTEX2

Cooperative Mobile Sensing Systems
POLAR
WILDFIRE
STORM
Personnel & Resources 10 Core Faculty from 4 Departments and Programs 18 Graduate Students and 13 Undergraduate $3.5M in Active Funding 4 Industry Sponsors, NOAA Partner Developing Unmanned Systems Grad Curriculum ISEE: Integrated Remote and In situ Sensing System
Research Areas1. Mission-Derived sUAS Design2. Mobile Ad Hoc Communications3. Vehicle-Sensor Integration4. Mobile Sensor Networks5. Cooperative UAS Teams6. Airspace Integration

Industry Collaborations
Sponsor BenefitsAdvisory Board Membership
IP and Patent Agreements
Faculty and Student Access
Facilities for Fabrication, Simulation, and Flight-Tests
Industry Sponsors

Our GA Aircraft
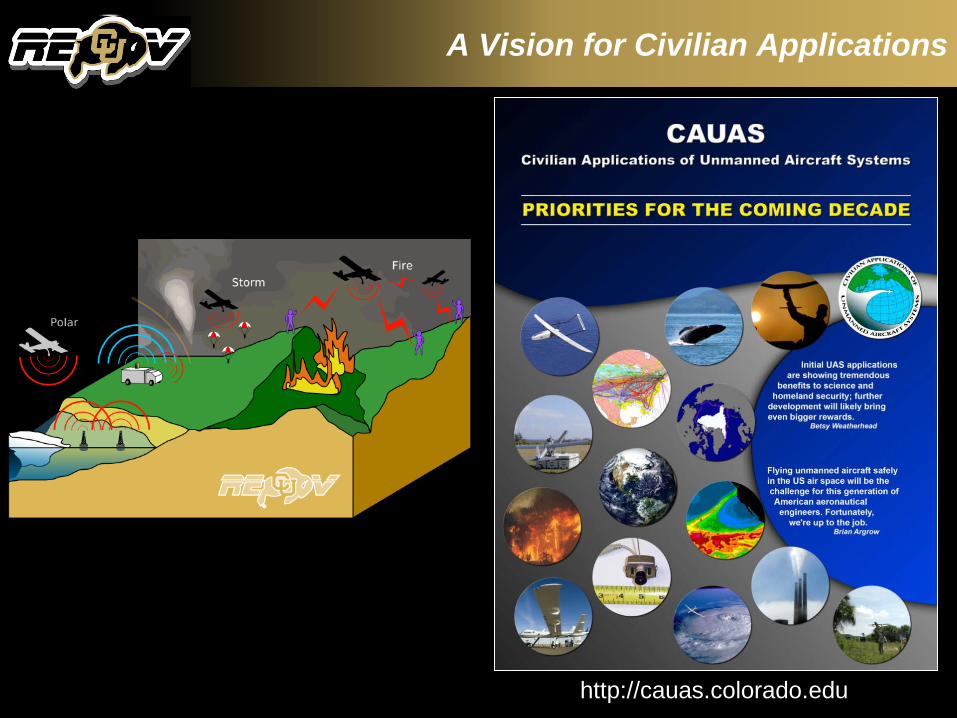
A Vision for Civilian Applications
http://cauas.colorado.edu

Table Mountain Flight Test Site
UAV Nodes
Mobile Nodes
Meshed RadioNetwork
Fixed Site 1
Fixed Site 2
Test Bed Gateway and Test Range IP Router
Range Network
Table Mountain Field Site
University of Colorado
Monitor Server
RemoteMonitor Internet
UAV Nodes
Mobile Nodes
Meshed RadioNetwork
Fixed Site 1
Fixed Site 2
Test Bed Gateway and Test Range IP Router
Range Network
Table Mountain Field Site
University of Colorado
Monitor Server
RemoteMonitor Internet
UAV Nodes
Mobile Nodes
Meshed RadioNetwork
Fixed Site 1
Fixed Site 2
Test Bed Gateway and Test Range IP Router
Range Network
Table Mountain Field Site
University of Colorado
Monitor Server
RemoteMonitor Internet
3 Active FAA Certificates of Authorization or Waiver (COAs)
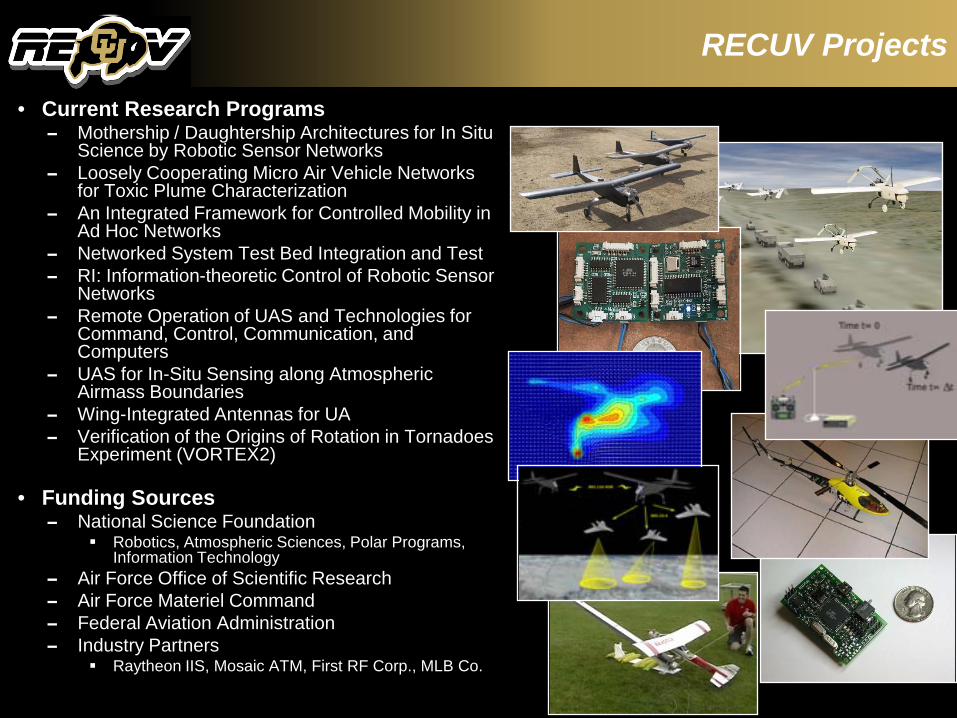
RECUV Projects
• Current Research Programs– Mothership / Daughtership Architectures for In Situ
Science by Robotic Sensor Networks – Loosely Cooperating Micro Air Vehicle Networks
for Toxic Plume Characterization– An Integrated Framework for Controlled Mobility in
Ad Hoc Networks– Networked System Test Bed Integration and Test– RI: Information-theoretic Control of Robotic Sensor
Networks– Remote Operation of UAS and Technologies for
Command, Control, Communication, and Computers
– UAS for In-Situ Sensing along Atmospheric Airmass Boundaries
– Wing-Integrated Antennas for UA– Verification of the Origins of Rotation in Tornadoes
Experiment (VORTEX2)
• Funding Sources– National Science Foundation
Robotics, Atmospheric Sciences, Polar Programs, Information Technology
– Air Force Office of Scientific Research– Air Force Materiel Command– Federal Aviation Administration– Industry Partners
Raytheon IIS, Mosaic ATM, First RF Corp., MLB Co.

Networked System Test Bed IntegrationT. Brown, B. Argrow, E. Frew, H. GatesSponsors: USAF, L3 Communications
.
Advanced Airborne ISR with Small UAS
Project Partner:Northrup Grumman
Electronic Systems Division
Flight ExperimentsFAA 2008 WSA-43 COA

A Closer Look

Integrated Framework For Controlled Mobility in Ad Hoc NetworksE. Frew, T. BrownSponsor: AFOSR
Exploit mobility control to mitigate physical, link, and network layer effects in stressed or fractured networks
Controlled Mobility: C2 Integration
Flight ExperimentsFAA 2008 WSA-1 COA
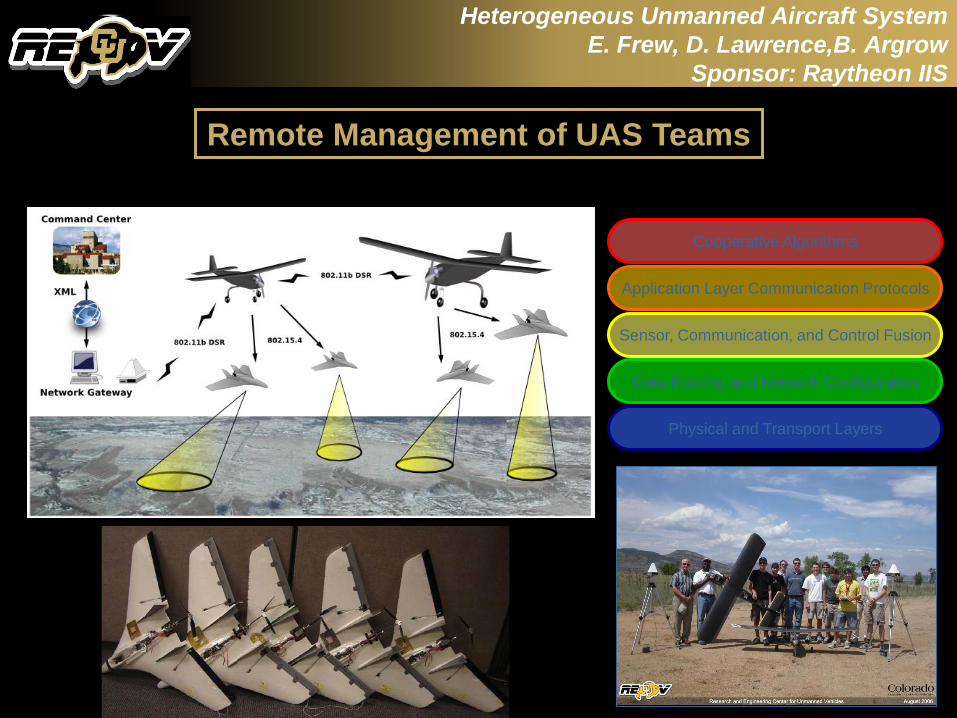
Cooperative Algorithms
Application Layer Communication Protocols
Sensor, Communication, and Control Fusion
Data Routing and Network Configuration
Physical and Transport Layers
Heterogeneous Unmanned Aircraft SystemE. Frew, D. Lawrence,B. Argrow
Sponsor: Raytheon IIS
Remote Management of UAS Teams
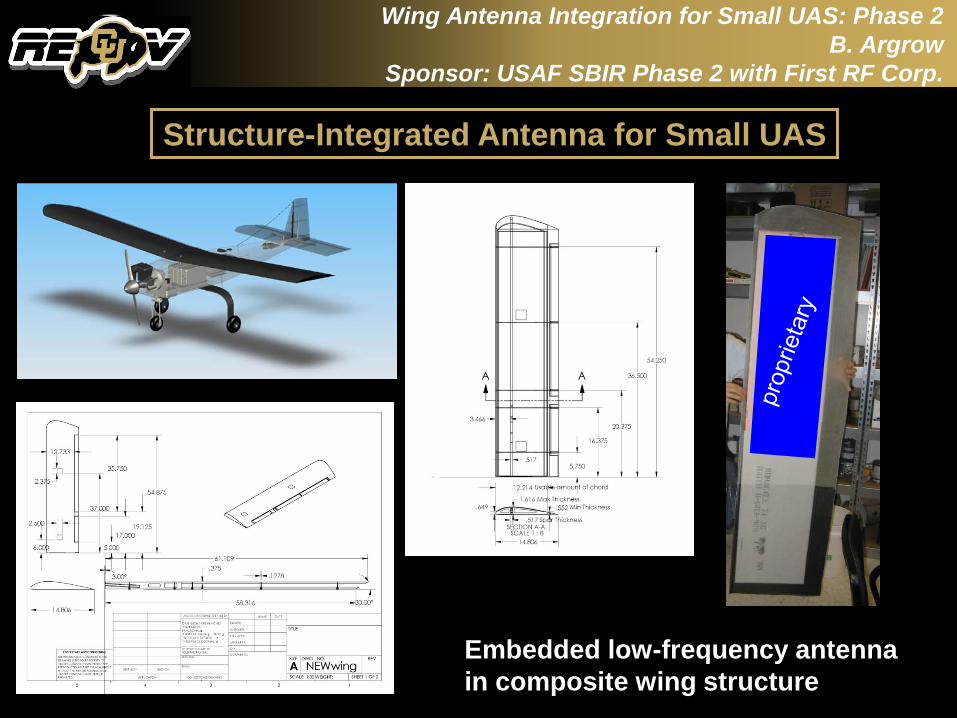
Wing Antenna Integration for Small UAS: Phase 2B. Argrow
Sponsor: USAF SBIR Phase 2 with First RF Corp.
Structure-Integrated Antenna for Small UAS
Embedded low-frequency antenna in composite wing structure
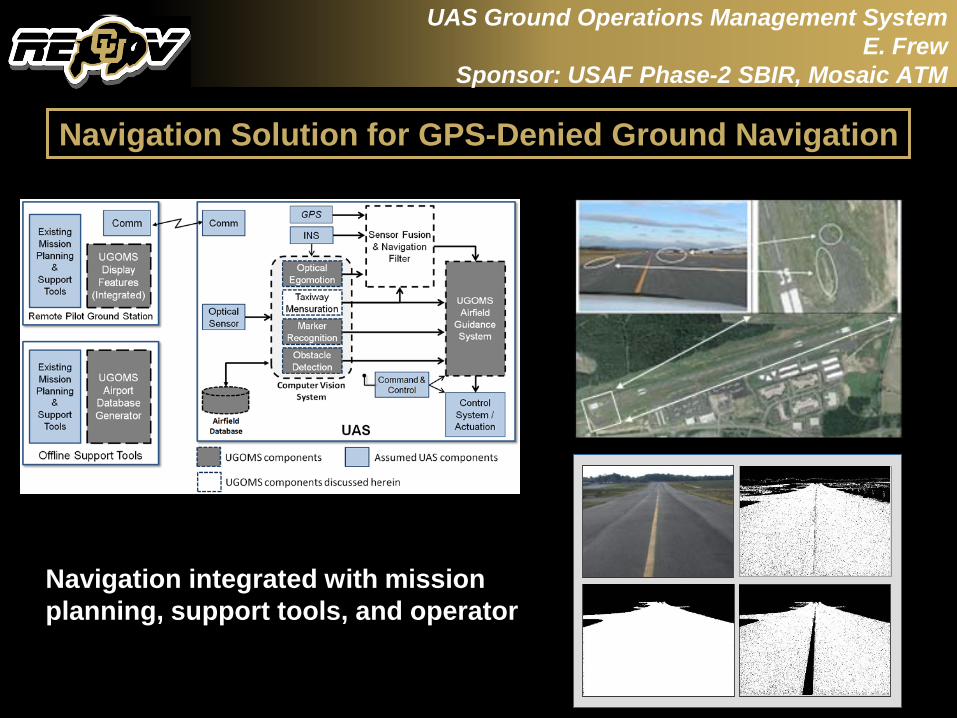
Navigation integrated with mission planning, support tools, and operator
UAS Ground Operations Management SystemE. Frew
Sponsor: USAF Phase-2 SBIR, Mosaic ATM
Navigation Solution for GPS-Denied Ground Navigation
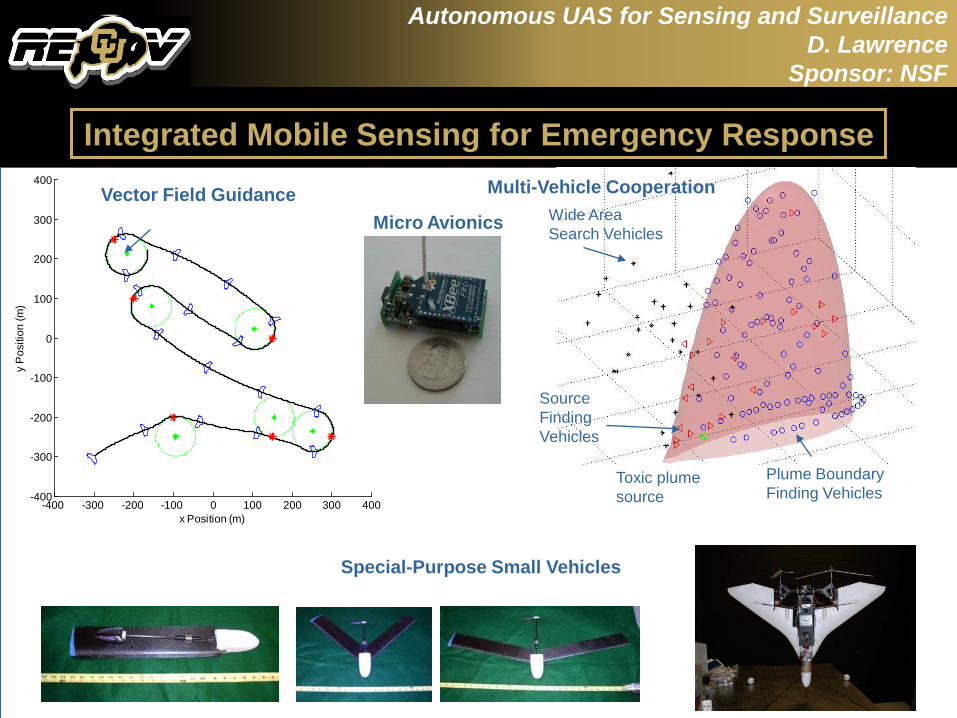
Autonomous UAS for Sensing and SurveillanceD. Lawrence
Sponsor: NSF
-400 -300 -200 -100 0 100 200 300 400-400
-300
-200
-100
0
100
200
300
400
x Position (m)
y P
ositi
on (m
)
Vector Field Guidance Multi-Vehicle CooperationWide Area Search Vehicles
Source Finding Vehicles
Plume Boundary Finding Vehicles
Toxic plume source
Micro Avionics
Integrated Mobile Sensing for Emergency Response
Special-Purpose Small Vehicles
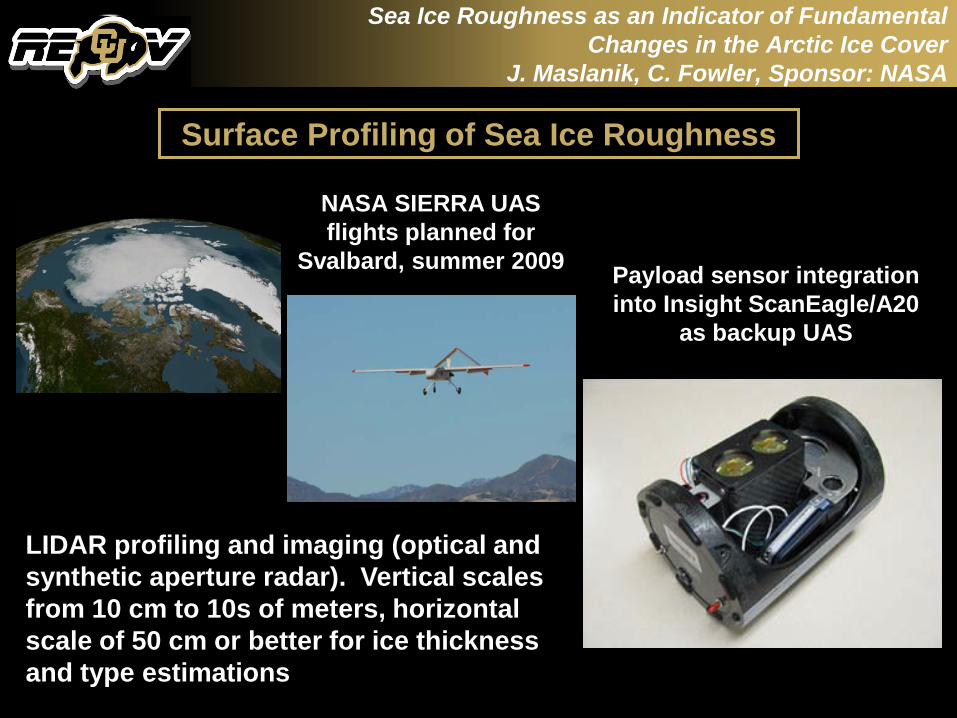
Sea Ice Roughness as an Indicator of Fundamental Changes in the Arctic Ice Cover
J. Maslanik, C. Fowler, Sponsor: NASA
Surface Profiling of Sea Ice Roughness
LIDAR profiling and imaging (optical and synthetic aperture radar). Vertical scales from 10 cm to 10s of meters, horizontal scale of 50 cm or better for ice thickness and type estimations
NASA SIERRA UAS flights planned for
Svalbard, summer 2009 Payload sensor integration into Insight ScanEagle/A20
as backup UAS
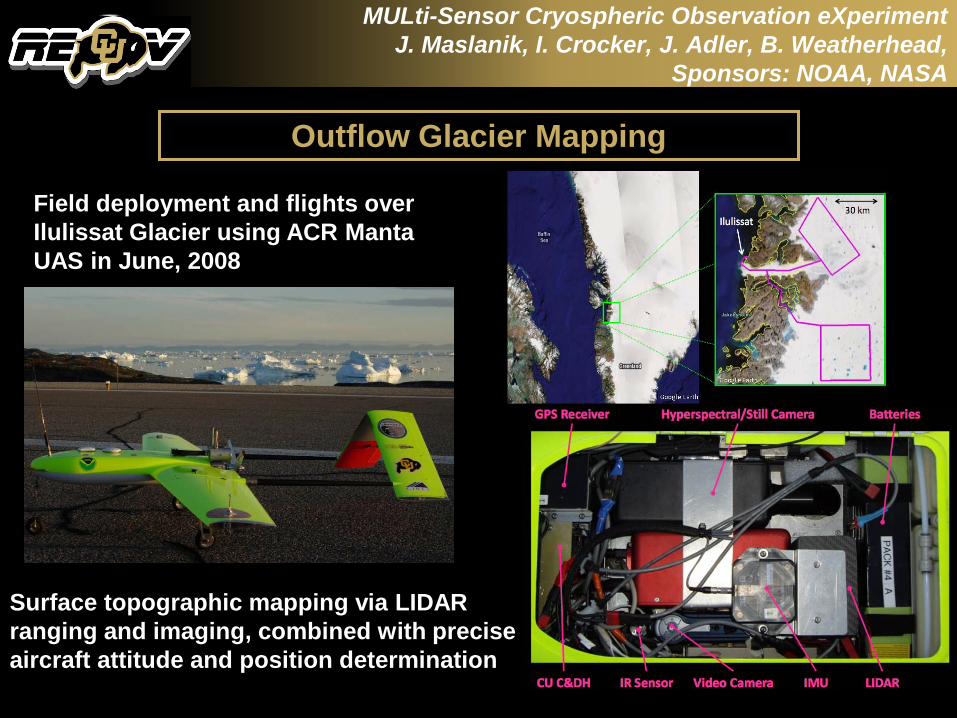
MULti-Sensor Cryospheric Observation eXperimentJ. Maslanik, I. Crocker, J. Adler, B. Weatherhead,
Sponsors: NOAA, NASA
Outflow Glacier Mapping
Surface topographic mapping via LIDAR ranging and imaging, combined with precise aircraft attitude and position determination
Field deployment and flights over Ilulissat Glacier using ACR Manta UAS in June, 2008
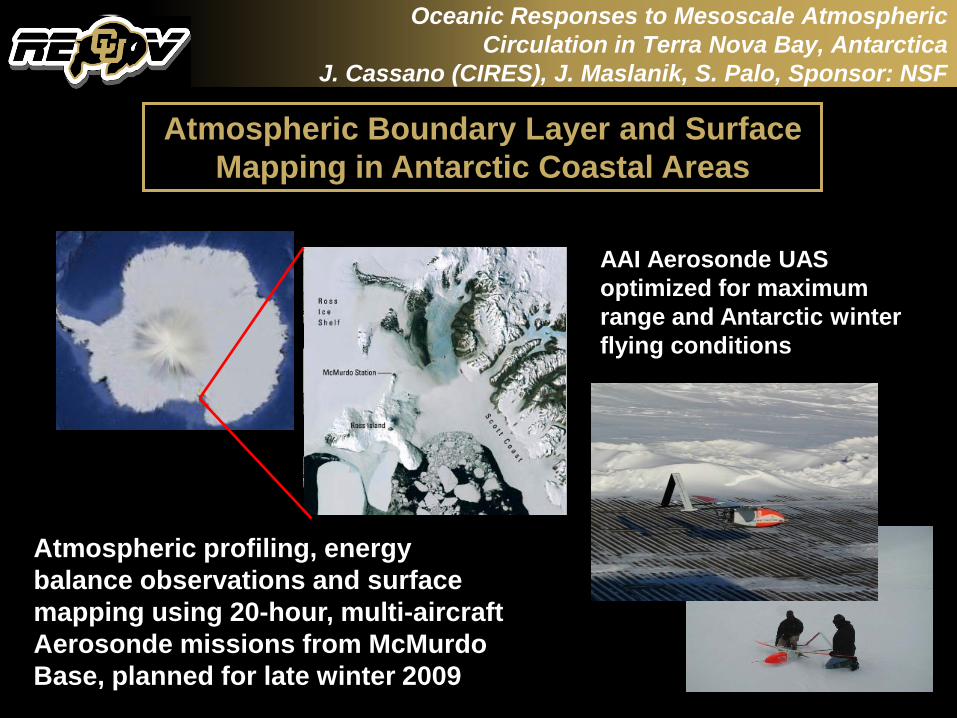
Oceanic Responses to Mesoscale Atmospheric Circulation in Terra Nova Bay, Antarctica
J. Cassano (CIRES), J. Maslanik, S. Palo, Sponsor: NSF
Atmospheric Boundary Layer and Surface Mapping in Antarctic Coastal Areas
Atmospheric profiling, energy balance observations and surface mapping using 20-hour, multi-aircraft Aerosonde missions from McMurdo Base, planned for late winter 2009
AAI Aerosonde UAS optimized for maximum range and Antarctic winter flying conditions

VORTEX2B. Argrow, E. Frew
Sponsor : NSF
Largest and most ambitious field experiment in history to explore tornadoes
NOAA and NSF sponsors
100 scientists and students
16 universities and academic organizations
NOAA National Weather Service (NWS) forecast offices, NOAA Storm Prediction Center, Environment Canada, Australia Bureau of Meteorology and Finland
http://www.vortex2.org/home/
Vortical Origins of Rotation in Tornadoes Experiment
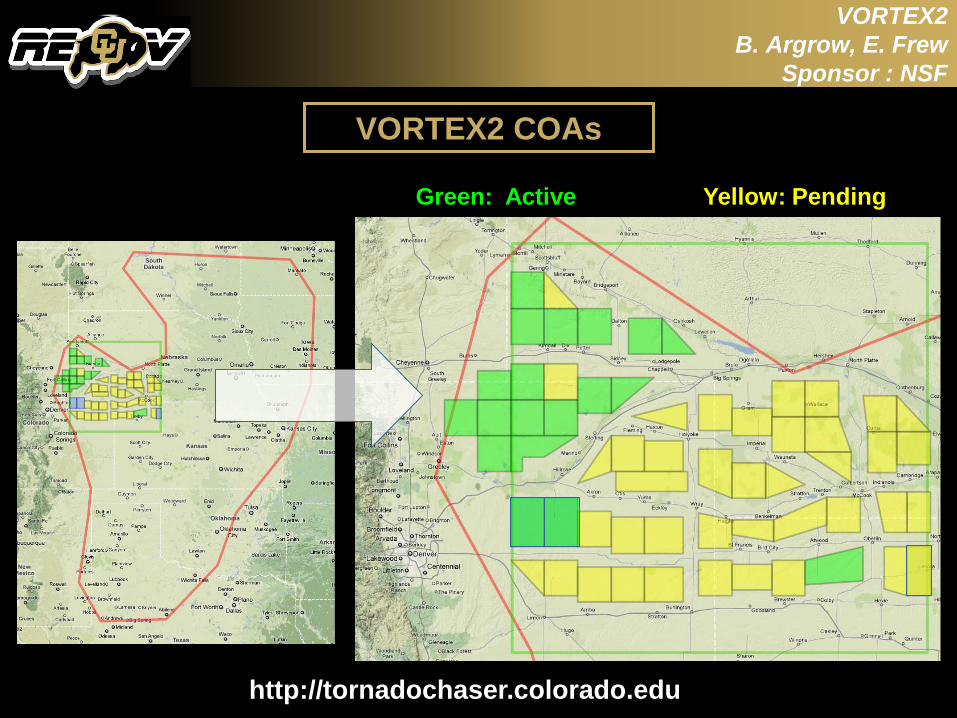
VORTEX2B. Argrow, E. Frew
Sponsor : NSF
VORTEX2 COAs
http://tornadochaser.colorado.edu
Green: Active Yellow: Pending
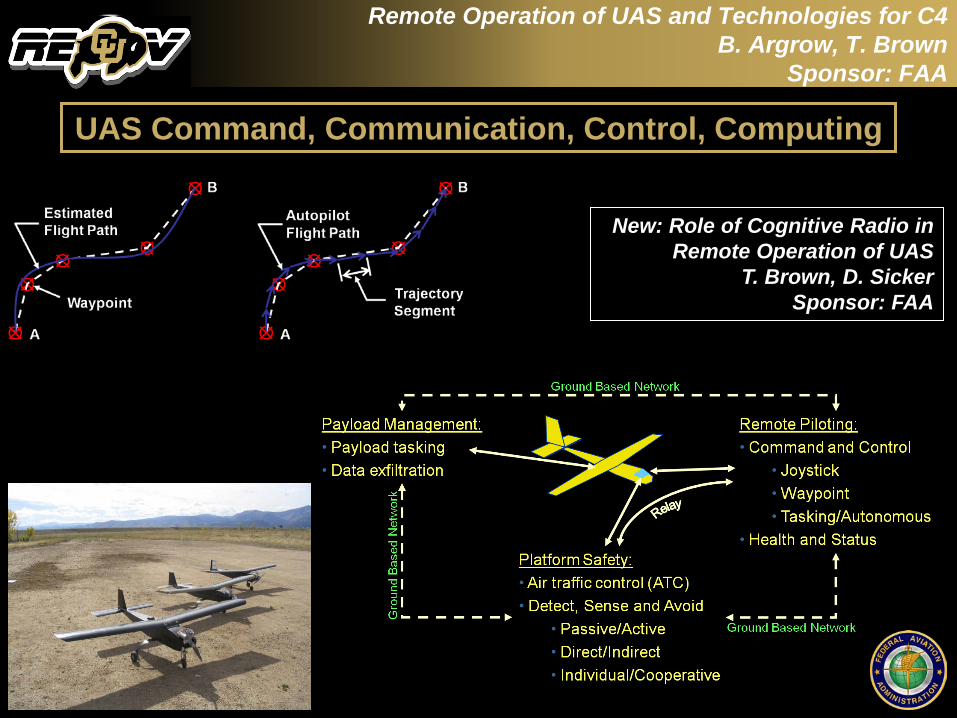
Remote Operation of UAS and Technologies for C4B. Argrow, T. Brown
Sponsor: FAA
New: Role of Cognitive Radio inRemote Operation of UAS
T. Brown, D. SickerSponsor: FAA
UAS Command, Communication, Control, Computing
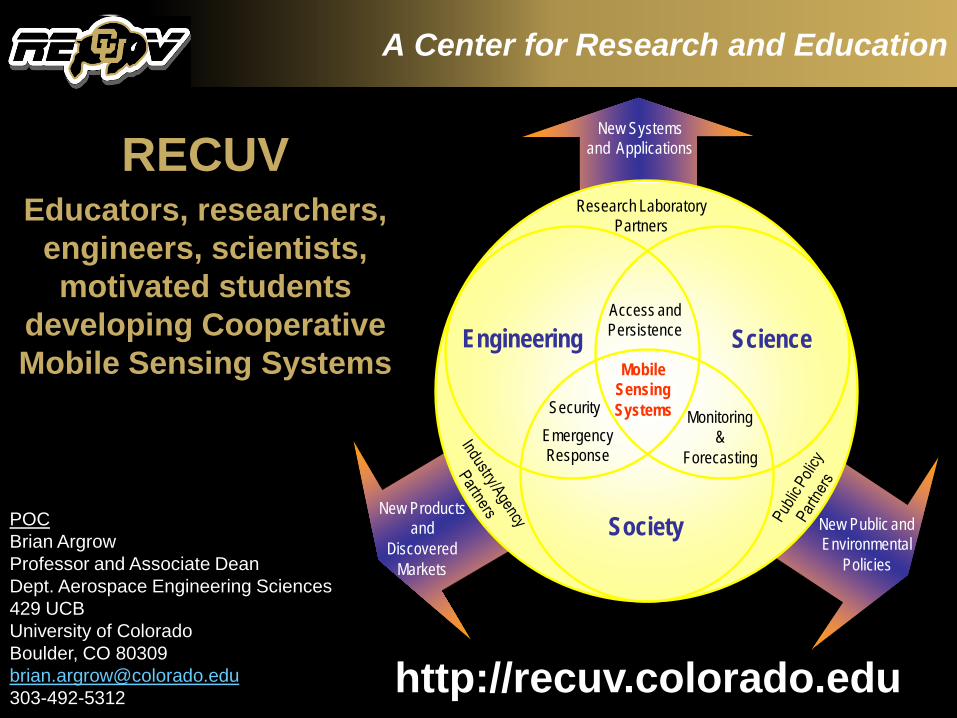
A Center for Research and Education
RECUVEducators, researchers,
engineers, scientists, motivated students
developing Cooperative Mobile Sensing Systems
Engineering Science
Society
Security
Access and Persistence
MobileSensingSystems
EmergencyResponse
Research Laboratory Partners
New Productsand
Discovered Markets
Monitoring&
Forecasting
New Public and Environmental
Policies
New Systemsand Applications
http://recuv.colorado.edu
POCBrian ArgrowProfessor and Associate DeanDept. Aerospace Engineering Sciences429 UCBUniversity of ColoradoBoulder, CO [email protected]