tracking overview and mathematics. christoph krautz 2 motivation technologies – advantages and...
TRANSCRIPT
TrackingOverview and Mathematics

Christoph Krautz 2
Motivation Technologies – Advantages and Disadvantages
– Common Problems and Errors– Acoustic Tracking– Mechanical Tracking– Inertial Tracking– Magnetic Tracking– Optical Tracking– Inside-out versus Outside-in
Mathematics– Transformations in the 2D-space– Transformations in the 3D-space
Discussion
Motivation TechnologiesTracking
Mathematics
Content
Christoph Krautz 3
What is tracking?
The repeated localization of the position and orientation (pose) of one or several real physical objects
Why is tracking needed in AR?
Integration of virtual objects into real world (images)
Motivation TechnologiesTracking
Mathematics
Motivation

Christoph Krautz 4
Motivation Technologies – Advantages and Disadvantages
– Common Problems and Errors– Acoustic Tracking– Mechanical Tracking– Inertial Tracking– Magnetic Tracking– Optical Tracking– Inside-out versus Outside-in
Mathematics– Transformations in the 2D-space– Transformations in the 3D-space
Discussion
Motivation TechnologiesTracking
Mathematics
Content
Christoph Krautz 5
Motivation TechnologiesTracking
Mathematics
Common Problems and Errors
High update rate required (usually in real-time systems)
Dynamic tracker error, e.g. sensor‘s motion Distortion due to environmental influences,
e.g. noise Long-term variations
– Cause readings to change from one day to the next day
Christoph Krautz 6
Motivation TechnologiesTracking
Mathematics
Acoustic Tracking
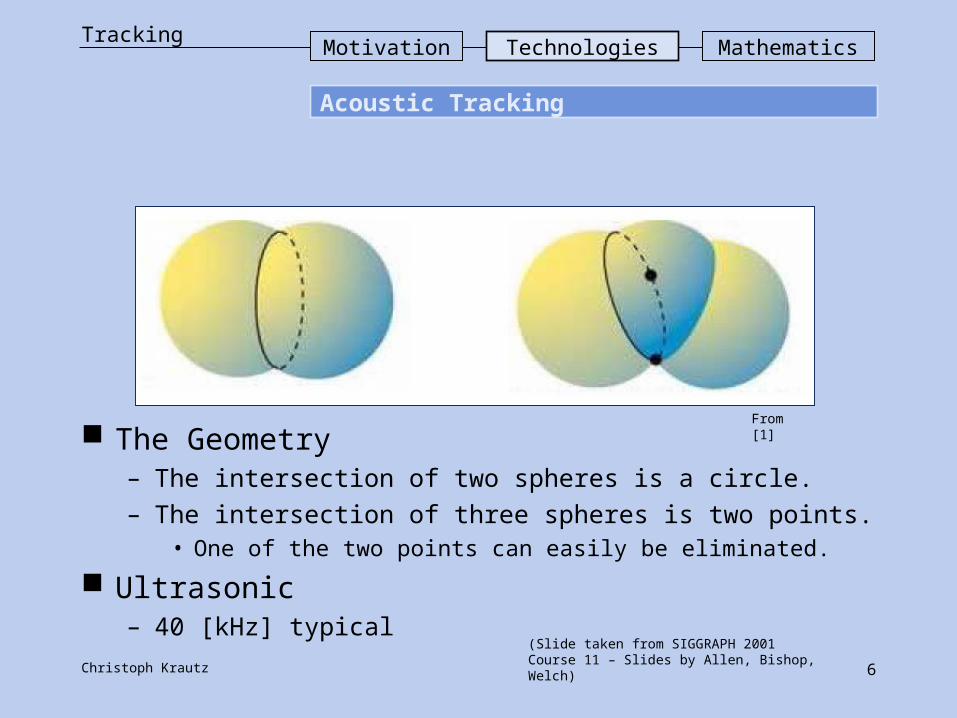
The Geometry– The intersection of two spheres is a circle.– The intersection of three spheres is two points.
• One of the two points can easily be eliminated.
Ultrasonic– 40 [kHz] typical (Slide taken from SIGGRAPH 2001 Course
11 – Slides by Allen, Bishop, Welch)
From [1]
Christoph Krautz 7
Motivation TechnologiesTracking
Mathematics
Acoustic Tracking - Methods
Time of Flight– Measures the time required for a sonic pulse to
travel from a transmitter to a receiver.– d [m] = v [m/s] * t [s], v = speed of sound– Absolute range measurement
Phase Coherence– Measures phase difference between transmitted and
received sound waves– Relative to previous measurement
• still absolute!!
(Slide taken from SIGGRAPH 2001 Course 11 – Slides by Allen, Bishop, Welch)
Christoph Krautz 8
Motivation TechnologiesTracking
Mathematics
Acoustic Tracking – Discussion
Advantages– Small and lightweight (miniaturization of transmitters
and receivers)– Only sensitive to influences by noise in the ultrasonic
range
Disadvantages– Speed of Sound (~331 [m/s] in air at 0°C)
• Varies with temperature, pressure and humidity Slow Low update rate
Christoph Krautz 9
Motivation TechnologiesTracking
Mathematics
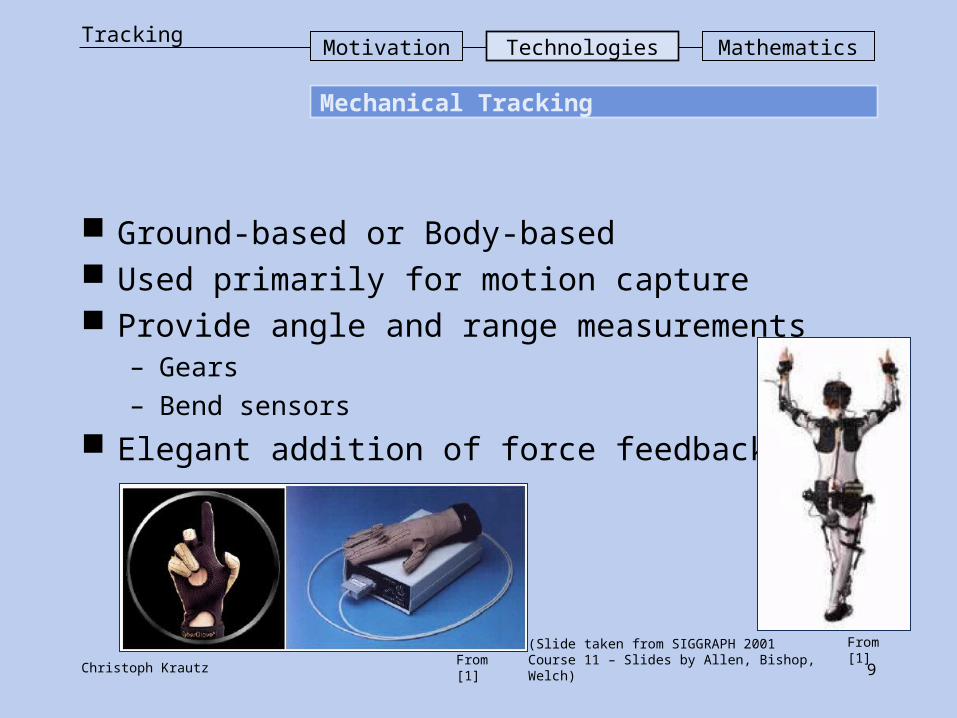
Mechanical Tracking
Ground-based or Body-based Used primarily for motion capture Provide angle and range measurements
– Gears– Bend sensors
Elegant addition of force feedback
(Slide taken from SIGGRAPH 2001 Course 11 – Slides by Allen, Bishop, Welch)
From [1]From [1]
Christoph Krautz 10
Motivation TechnologiesTracking
Mathematics
Mechanical Tracking – Discussion
Advantages– Good accuracy– High update rate– No suffering from environmental linked errors
Disadvantages– Small working volume due to mechanical linkage
with the reference
Christoph Krautz 11
Motivation TechnologiesTracking
Mathematics
Inertial Tracking
Inertia– Rigidity in space
Newton’s Second Law of Motion– F = ma (linear)– M = I (rotational)
Accelerometers and Gyroscopes– Provide derivative measurements
Christoph Krautz 12
Motivation TechnologiesTracking
Mathematics
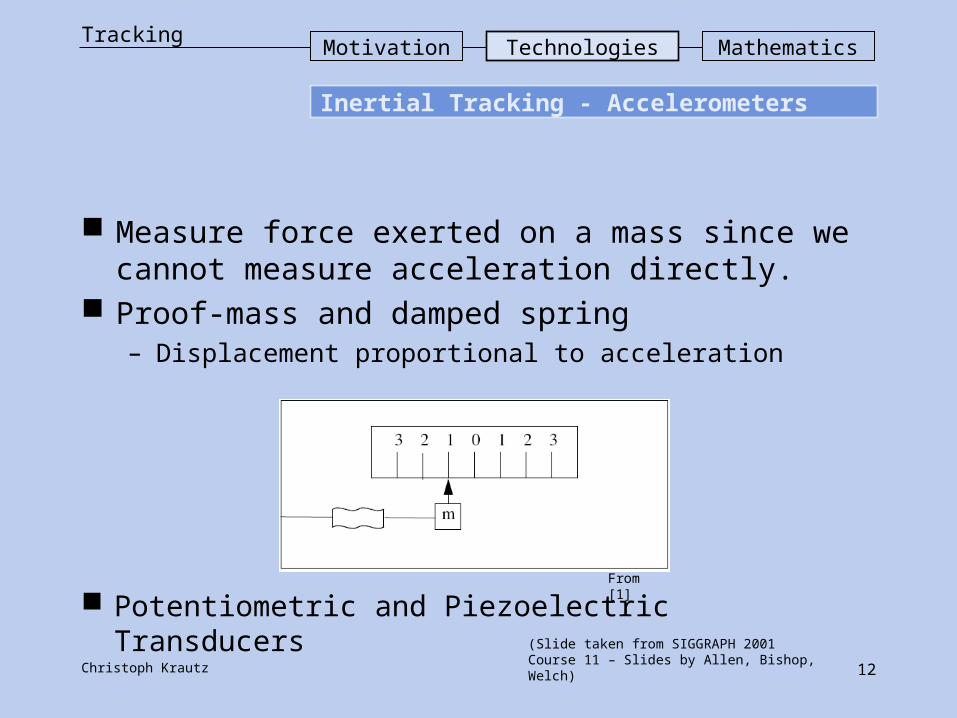
Inertial Tracking - Accelerometers
Measure force exerted on a mass since we cannot measure acceleration directly.
Proof-mass and damped spring– Displacement proportional to acceleration
Potentiometric and Piezoelectric Transducers(Slide taken from SIGGRAPH 2001 Course 11 – Slides by Allen, Bishop, Welch)
From [1]
Christoph Krautz 13
Motivation TechnologiesTracking
Mathematics
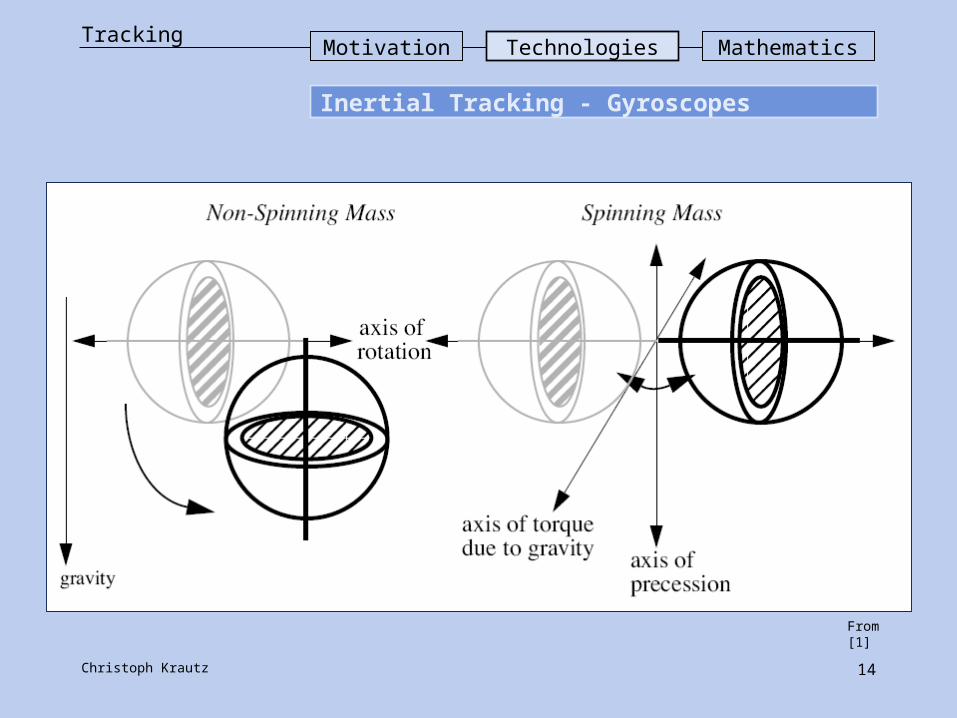
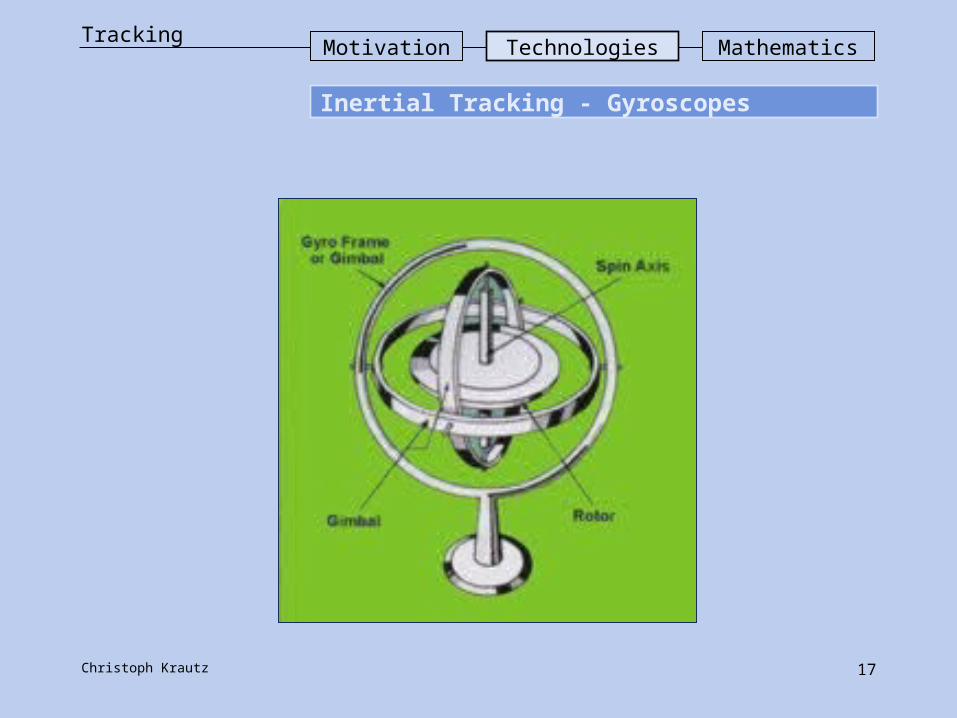
Inertial Tracking - Gyroscopes
Conservation of angular momentum Precession
– If torque is exerted on a spinning mass, its axis of rotation will precess at right angles to both itself and the axis of the exerted torque
Christoph Krautz 14
Motivation TechnologiesTracking
Mathematics
Inertial Tracking - Gyroscopes
From [1]

Christoph Krautz 15
Motivation TechnologiesTracking
Mathematics
Inertial Tracking - Gyroscopes
From [1]
Christoph Krautz 16
Motivation TechnologiesTracking
Mathematics
Inertial Tracking - Gyroscopes
Christoph Krautz 17
Motivation TechnologiesTracking
Mathematics
Inertial Tracking - Gyroscopes

Christoph Krautz 18
Motivation TechnologiesTracking
Mathematics
Inertial Tracking – Discussion
Advantages– Lightweight– No physical limits on the working volume
Disadvantages– Error accumulation due to integration (numerical)
• Periodic recalibration– Hybrid systems typical
– Drift in the axis of rotation of a gyroscope due to the remaining friction between the axis of the wheel and the bearings
Christoph Krautz 19
Motivation TechnologiesTracking
Mathematics
Magnetic Tracking
Three mutually-orthogonal coils– Each transmitter coil activated serially
• Induced current in the receiver coils is measured– Varies with
» the distance (cubically) from the transmitter and» their orientation relative to the transmitter (cosine of
the angle between the axis and the local magnetic field direction)
• Three measurements apiece (three receiver coils)• Nine-element measurement for 6D pose
AC at low frequency DC-pulses
(Parts of the slide taken from SIGGRAPH 2001 Course 11 – Slides by Allen, Bishop, Welch)

Christoph Krautz 20
Motivation TechnologiesTracking
Mathematics
Magnetic Tracking – Discussion
Advantages– Small– Good update rate
Disadvantages– Small working volume– Ferromagnetic interference– Eddy currents induced in conducting materials
Distortions Inaccurate pose estimates
– Use of DC transmitters overcomes that problem– Sensitive to electromagnetic noise
Christoph Krautz 21
Motivation TechnologiesTracking
Mathematics
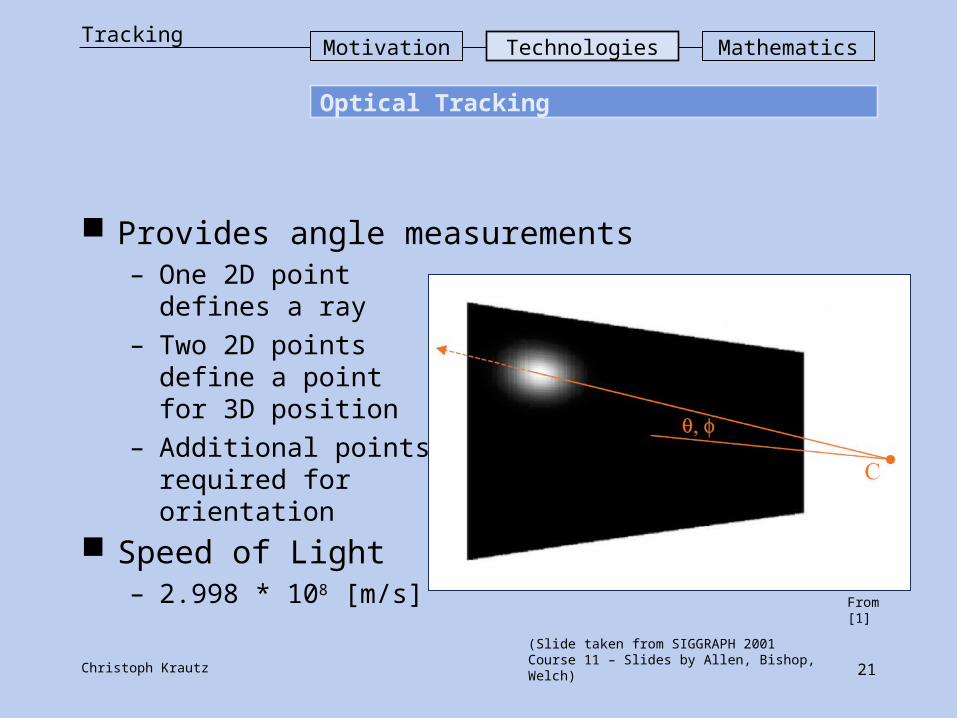
Optical Tracking
Provides angle measurements– One 2D point
defines a ray– Two 2D points
define a pointfor 3D position
– Additional pointsrequired fororientation
Speed of Light– 2.998 * 108 [m/s]
(Slide taken from SIGGRAPH 2001 Course 11 – Slides by Allen, Bishop, Welch)
From [1]

Christoph Krautz 22
Motivation TechnologiesTracking
Mathematics
Optical Tracking – Active Targets
Typical detectors– Lateral Effect PhotoDiodes (LEPDs)– Quad Cells
Active targets– LEDs
From [1]
Christoph Krautz 23
Motivation TechnologiesTracking
Mathematics
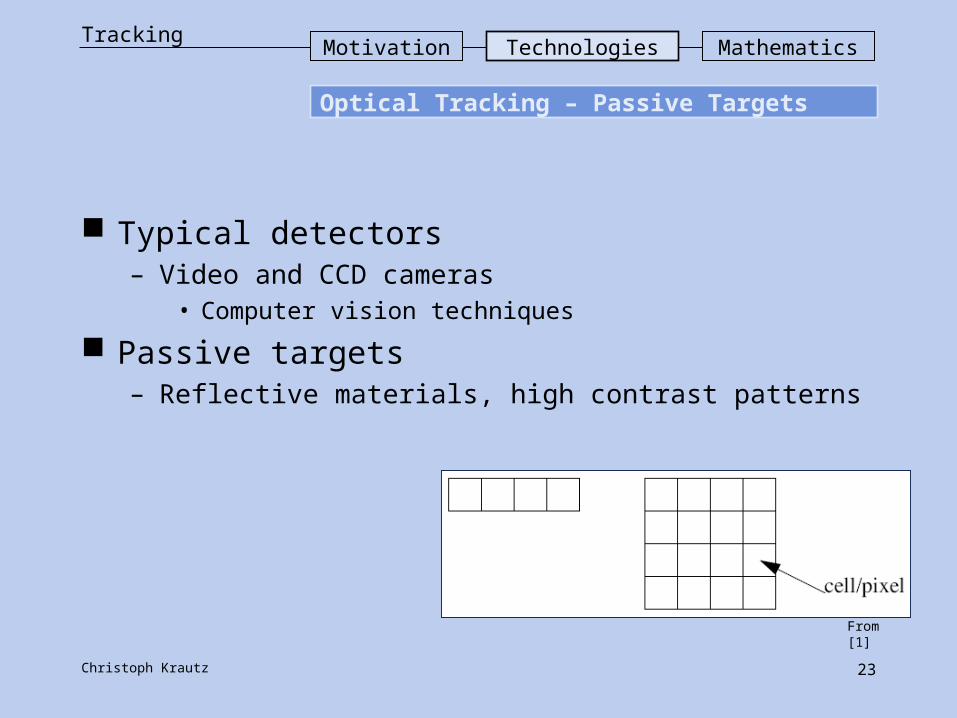
Optical Tracking – Passive Targets
Typical detectors– Video and CCD cameras
• Computer vision techniques
Passive targets– Reflective materials, high contrast patterns
From [1]
Christoph Krautz 24
Motivation TechnologiesTracking
Mathematics
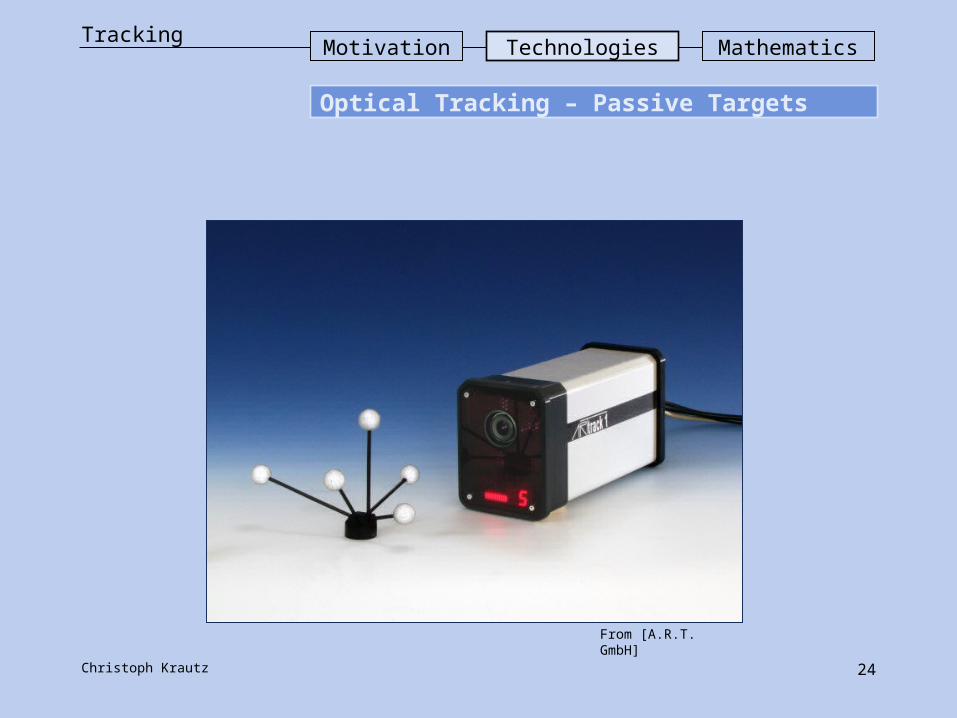
Optical Tracking – Passive Targets
From [A.R.T. GmbH]
Christoph Krautz 25
Motivation TechnologiesTracking
Mathematics
Optical Tracking – Discussion
Advantages– Good update rate (due to the speed of light)
• Well suited for real-time systems
Disadvantages– Accuracy tends to worsen with increased distance– Sensitive to optical noise and spurious light
• Can be minimized by using infrared light
– Ambiguity of surface and occlusion
Christoph Krautz 26
Motivation TechnologiesTracking
Mathematics
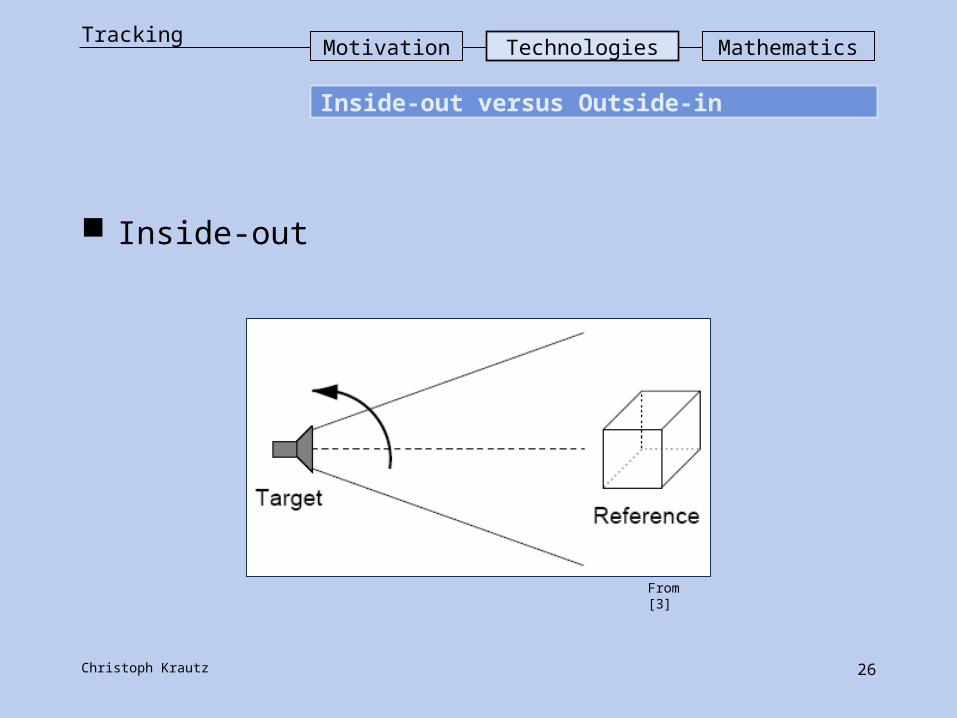
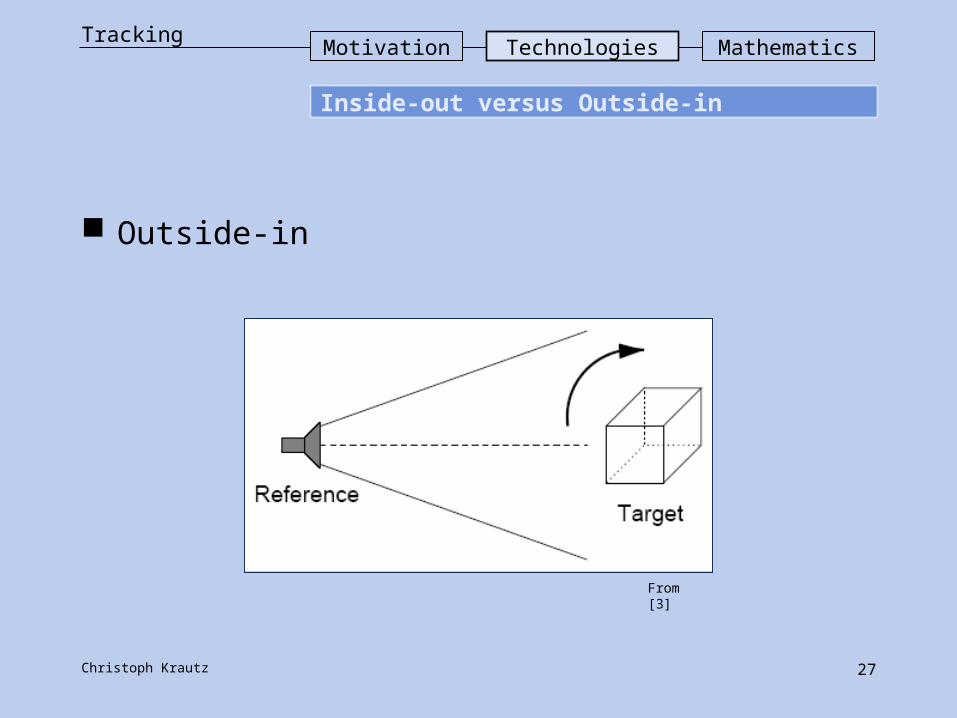
Inside-out versus Outside-in
Inside-out
From [3]
Christoph Krautz 27
Motivation TechnologiesTracking
Mathematics
Inside-out versus Outside-in
Outside-in
From [3]
Christoph Krautz 28
Motivation Technologies – Advantages and Disadvantages
– Common Problems and Errors– Acoustic Tracking– Mechanical Tracking– Inertial Tracking– Magnetic Tracking– Optical Tracking– Inside-out versus Outside-in
Mathematics– Transformations in the 2D-space– Transformations in the 3D-space
Discussion
Motivation TechnologiesTracking
Mathematics
Content
Christoph Krautz 29
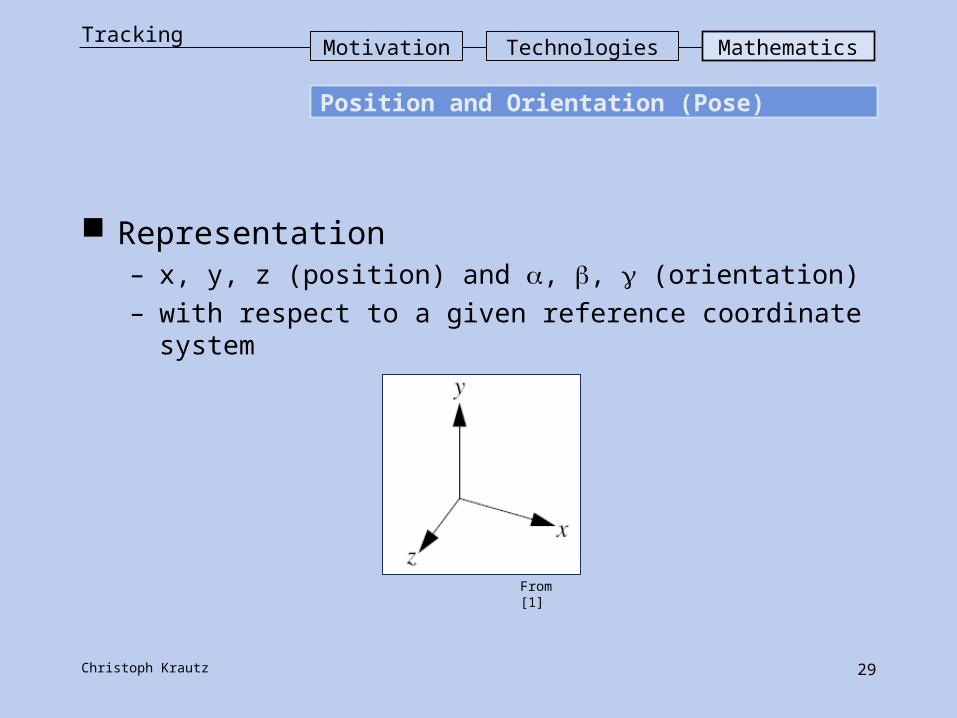
Representation– x, y, z (position) and , , (orientation)– with respect to a given reference coordinate system
Motivation TechnologiesTracking
Mathematics
Position and Orientation (Pose)
From [1]
Christoph Krautz 30
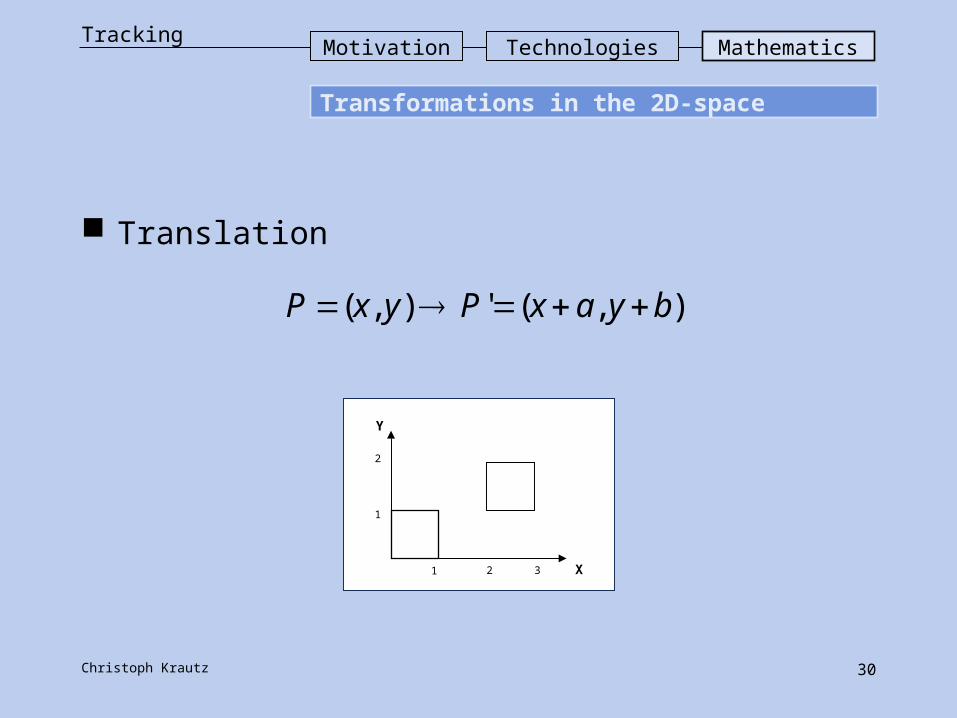
Translation
Motivation TechnologiesTracking
Mathematics
Transformations in the 2D-space
),('),( byaxPyxP
1 2 3
1
2
X
Y

Christoph Krautz 31
Scale
Motivation TechnologiesTracking
Mathematics
Transformations in the 2D-space
),('),( 21 ysxsPyxP
2
1
0
0
'
s
sS
SPP
1 2 3
1
2
X
Y
Christoph Krautz 32
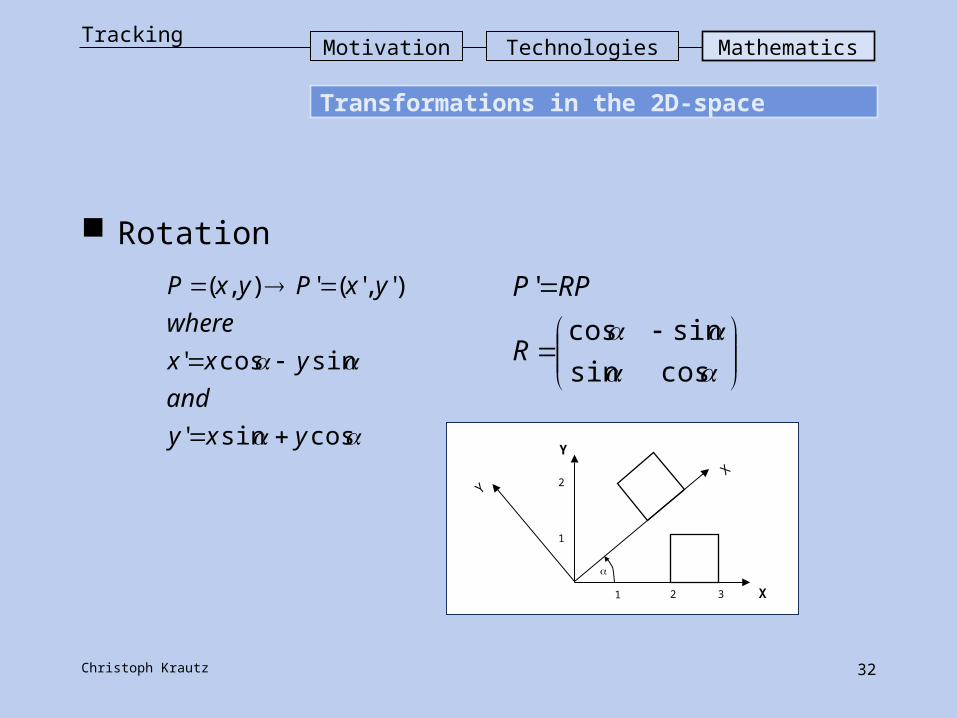
Rotation
Motivation TechnologiesTracking
Mathematics
Transformations in the 2D-space
cossin'
sincos'
)','('),(
yxy
and
yxx
where
yxPyxP
cossin
sincos
'
R
RPP
1 2 3
1
2
X
Y
XY

Christoph Krautz 33
Scale and Rotation can be combined by multiplication of their matrices
Translation cannot be combined with them by multiplication
Introduction of Homogeneous Coordinates
Motivation TechnologiesTracking
Mathematics
Transformations in the 2D-space
)1,,(),( yxyx
From [1]
Christoph Krautz 34
Motivation TechnologiesTracking
Mathematics
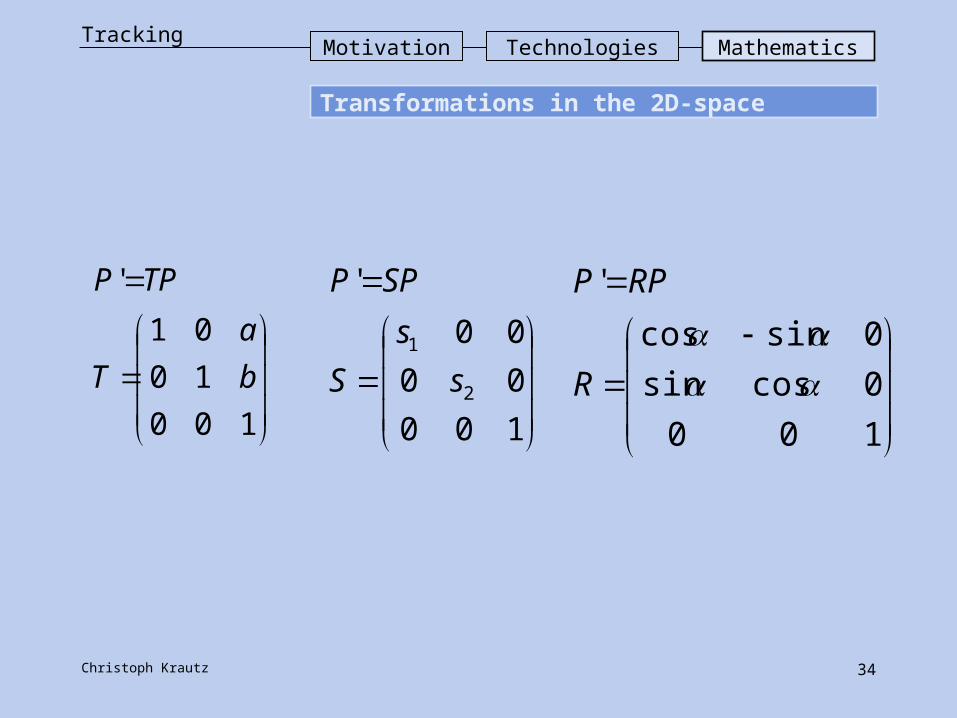
Transformations in the 2D-space
100
10
01
'
b
a
T
TPP
100
00
00
'
2
1
s
s
S
SPP
100
0cossin
0sincos
'
R
RPP
Christoph Krautz 35
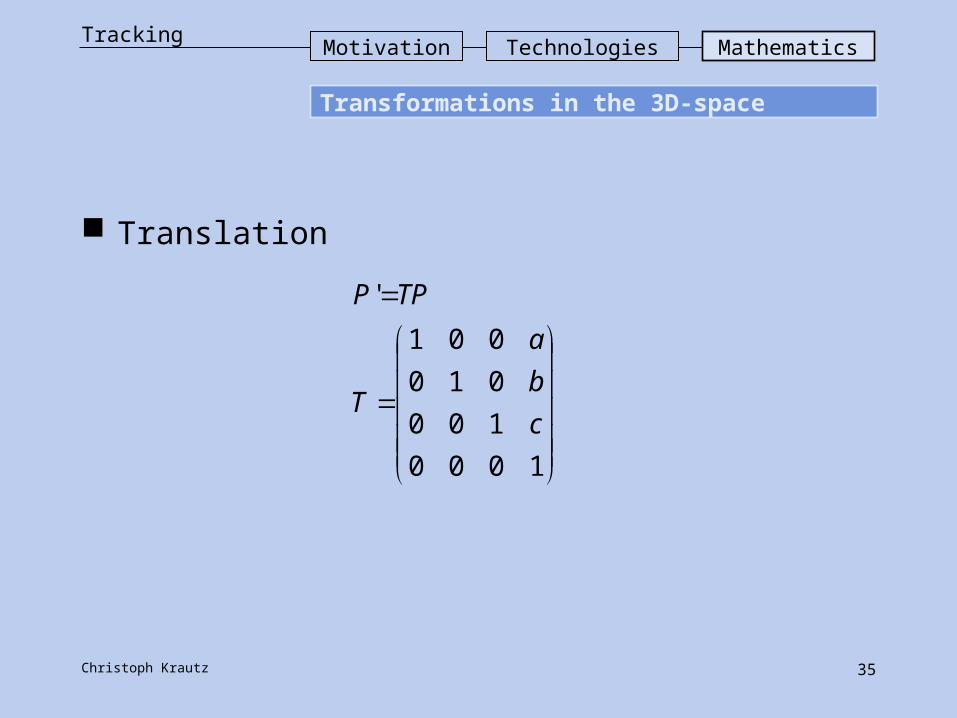
Translation
Motivation TechnologiesTracking
Mathematics
Transformations in the 3D-space
1000
100
010
001
'
c
b
a
T
TPP
Christoph Krautz 36
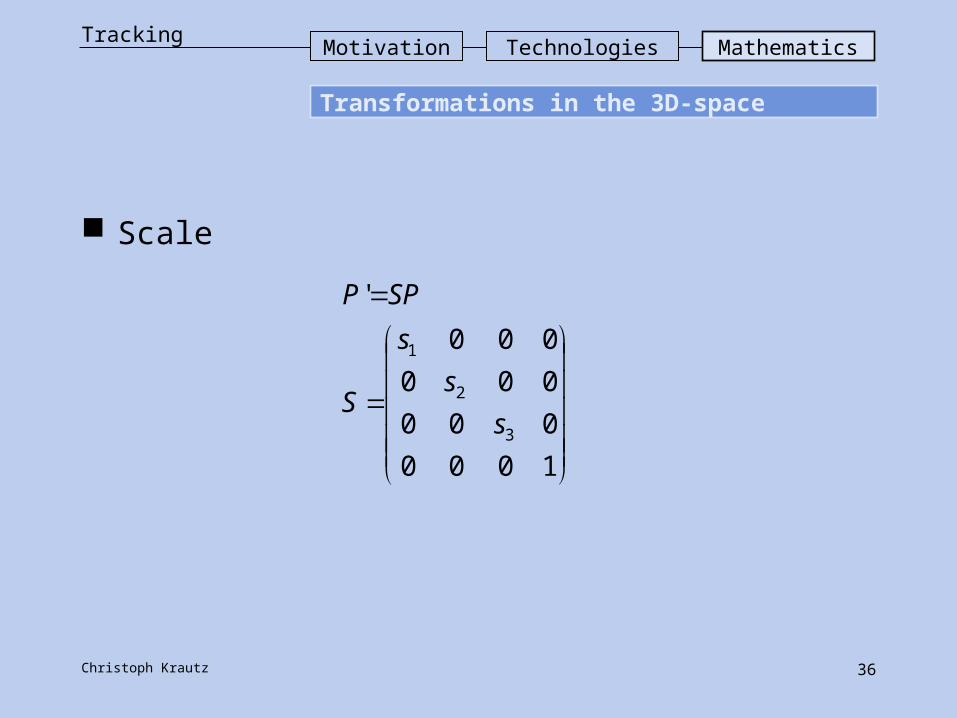
Scale
Motivation TechnologiesTracking
Mathematics
Transformations in the 3D-space
1000
000
000
000
'
3
2
1
s
s
s
S
SPP

Christoph Krautz 37
Rotation
Motivation TechnologiesTracking
Mathematics
Transformations in the 3D-space
1000
0
0
0
'
333231
232221
131211
rrr
rrr
rrr
R
RPP
Christoph Krautz 38
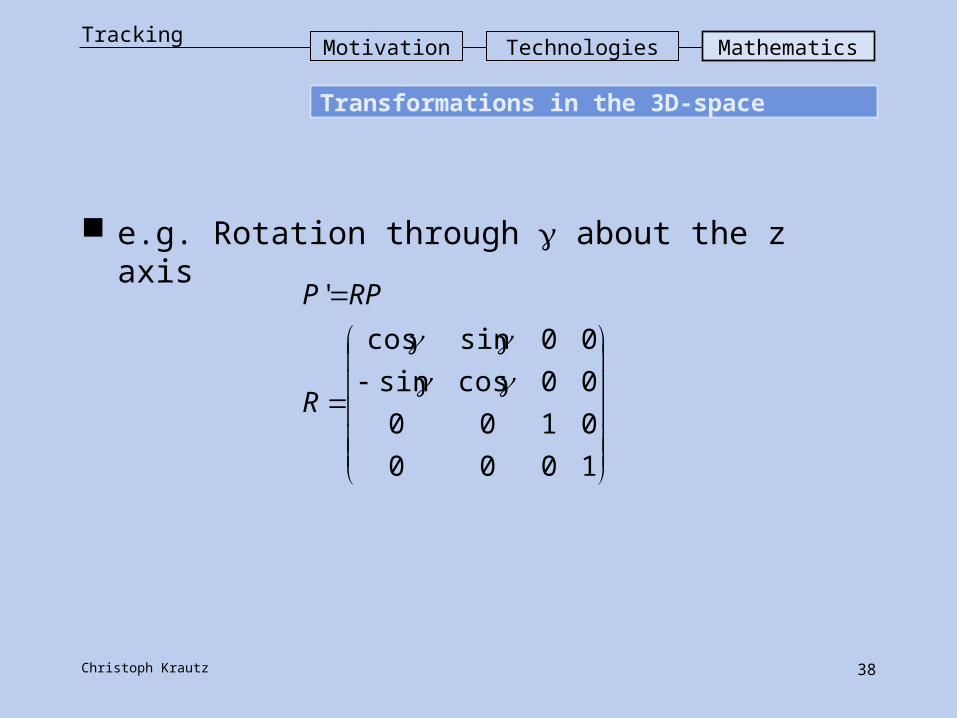
e.g. Rotation through about the z axis
Motivation TechnologiesTracking
Mathematics
Transformations in the 3D-space
1000
0100
00cossin
00sincos
'
R
RPP
Christoph Krautz 39
Rotation-Sequences– Concatenation of several rotations– Can be performed by using
• Rotation matrices (matrix multiplication)• Euler-angles• Quaternions
Motivation TechnologiesTracking
Mathematics
Transformations in the 3D-space

Christoph Krautz 40
Euler-angles– Three angles , and
• Each represents a rotation about one of the coordinate axes (X, Y and Z).
– Gimbal Lock– Ambiguities
• R(, 0, 0) = R(0, , )
Motivation TechnologiesTracking
Mathematics
Transformations in the 3D-space

Christoph Krautz 41
Quaternions
Motivation TechnologiesTracking
Mathematics
Transformations in the 3D-space
),,(),,(: zyxvvskzjyixsq
Unit Quaternions
12222 zyxs
A unit quaternionrepresents a rotation about the axisthrough the angle
),( vs
v
sarccos2

Christoph Krautz 42
Multiplication-operator for quaternions:
Motivation TechnologiesTracking
Mathematics
Transformations in the 3D-space
),( vvvrvrvvrr rqqrrqrqrqqrp
The result is a rotation p composed by the rotations q and r.
Christoph Krautz 43
Motivation TechnologiesTracking
Mathematics
Transformations in the 3D-space
Advantages of quaternions:– No gimbal lock– Unique representation of a rotation– Interpolation can be properly carried out
(spherical interpolation on the 4-sphere; Shoemake, 1985)
– Rotation-sequences can be easily performed
Christoph Krautz 44
Motivation TechnologiesTracking
Mathematics
Conclusion
Each tracking technology has advantages and disadvantages
Multi-Sensor-Fusion for minimizing the measurement errors
Transformations in the 3D-space have to be handled with care
Christoph Krautz 45
Motivation TechnologiesTracking
Mathematics
Thank you for your attention!
Any questions?
Christoph Krautz 46
Motivation TechnologiesTracking
Mathematics
References:
[1] G. Bishop, G. Welch and B. D. Allen, „Tracking: Beyond 15 Minutes of Thought”,SIGGRAPH 2001 Course Notes, University of North Carolina at Chapel Hill
[2] G. Bishop, G. Welch and B. D. Allen, „Tracking: Beyond 15 Minutes of Thought”,SIGGRAPH 2001 Course Slides, University of North Carolina at Chapel Hill
[3] Ribo, Miguel, “State of the Art Report on Optical Tracking”, 2001