trajectory tracking controller design based … · trajectory tracking controller design based on...
TRANSCRIPT

VII CAIQ 2013 y 2das JASP
AAIQ Asociación Argentina de Ingenieros Químicos - CSPQ
TRAJECTORY TRACKING CONTROLLER DESIGN BASED ON
LINEAR ALGEBRA WITH INTEGRAL ACCION: APPLICATION
TO CSTR SYSTEMS.
Romina B. Suvire*1,
Gustavo J. E. Scaglia2, Mario E. Serrano
3,
Jorge R.Vega4 and Oscar A. Ortiz
5
*1 Universidad Nacional de San Juan (UNSJ) – CONICET –
Av. Libertador San Martín 1109 (oeste) San Juan; Argentina
(Corresponding author phone: +54 264 4211700; e-mail: [email protected])
2, 3 UNSJ – CONICET
4 INTEC - Universidad Nacional del Litoral (UNL) - CONICET-
5 UNSJ
Abstract. This work presents a new methodology based on Linear Algebra
to design control algorithms for the trajectory tracking of a continuously
stirred tank reactor (CSTR) system. The methodology is simple and was
designed originally for non-linear multivariable mechanical systems: Mobile
Robotic Systems however can be applied to the design of a large class of
control systems. Particularly, a typical CSTR plant was chosen as a realistic
example problem for the application of this technique.
Keywords: Continuously Stirred Tank Reactor, Control System Design, Linear
Algebra, Tracking Trajectory Control.
1. Introduction
Continuous Stirred Tank Reactors (CSTR) are central components of many Industrial
Plants in the Chemical and Biochemical Process and has been perhaps the most widely
studied unit operation, from both dynamic analysis and control perspectives. These
systems may exhibit highly nonlinear dynamic behavior (Vojtesek et al, 2009). In such
* To whom all correspondence should be sent

VII CAIQ 2013 y 2das JASP
AAIQ, Asociación Argentina de Ingenieros Químicos - CSPQ
cases, the use of conventional control strategies can results in poor performance and
knowledge about the static and dynamic properties is a necessary condition for the
design of a controller.
Because of its importance, the CSTR has been the subject of numerous studies on
stability (Melo et al., 2003; Perez et al., 2004; Ma et al., 2010), states estimation (Jana,
2007; Fissore, 2008; Prakash et al., 2008) and process control (Alvarez-Ramirez et al.,
2001; Czeczot, 2006; Yazdi et al., 2009; Favache et al., 2010).
The CSTR control has been addressed with a variety of control techniques linear and
non-linear. (Velasco et al., 2011). For example, classic control and its derivations
(Alvarez-Ramirez et al., 2001, Perez et al., 2004, Jana, 2007; Prakash et al., 2009),
adaptive control (Czeczot, 2006, Pan et al., 2007), robust control (Fissore, 2008;),
geometric control (Viel et al., 1997; Yazdi et al., 2009), among others (Alvarez-
Ramirez, 1994; Favache et al., 2010, Prakash et al., 2008) .
As consequence of the nonlinearity of the reaction kinetics, the CSTR can deploy a
variety of dynamic behavior, from multiple steady states (Bequette Wayne B., 2002) to
sustained oscillations (Melo et al., 2003, Ma et al., 2010). Moreover, the literature
shows that feedback control schemes in CSTR may lead to instabilities in closed loop
process (Alvarez-Ramirez, 1994; Paladino et al., 2000; Perez et al., 2004 ).
Often chemical reactors have significant heat effects, so it is important to be able to
add or eliminate heat from them. In a Continuously Stirred Tank Reactor (CSTR) the
heat is add or removed by virtue of the temperature difference between a jacked fluid
and the reactor fluid (Bequette et al., 2002; Kalhoodashti, 2011; Aslam- Kaur, 2011).
The heat transfer fluid often is pumped through agitation nozzle that circulates the
fluid through the jacket at a high velocity.
The product concentration for a CSTR can be controlled by manipulating the feed
flow rate, which changes the residence time for a constant chemical reactor
(Kalhoodashti, 2011; Aslam- Kaur, 2011).
The heat extraction process is controlled by manipulating the speed of the cooling
fluid. In many cases the jacket dynamic is faster than reactor dynamic and therefore the
cooling fluid velocity binds to the jacket temperature (Ogunnaike et al., 1994).

VII CAIQ 2013 y 2das JASP
AAIQ, Asociación Argentina de Ingenieros Químicos - CSPQ
One the main problems found in CSTR control are trajectory tracking. In most cases
the variable of greatest interest to be monitored is the exit concentration of any
component of the reactant mixture, or the reactor operation temperature control in the
no isothermal case (Ogunnaike et al., 1994), while manipulated input is the temperature
or cooling medium flow.
Various control strategies have been developed in literature for trajectory tracking of
Continuously Stirred Tank Reactor (CSTR) systems.
In Lightbody et al., (1995) a reference adaptive control scheme (MRAC) is proposed
and used to improve the control of a nonlinear continuously stirred tank reactor (CSTR).
The performance of this technique for the control of nonlinear plants is demonstrated by
comparison with Lyapunov adaptive control for a number of example plants.
The adaptive tracking controller using multilayer neural networks (MNNs) proposed
by Ge et al., (1998) ensures that the system output tracks a given bounded reference
signal while stability of the closed-loop system is guaranteed. The effectiveness of the
proposed controller is illustrated through to composition control in the CSTR system
given in Lightbody et al., (1995).
In Kalhoodashti, (2011) presents a control algorithm called Neural Network
Approximate Generalized Predictive Control (NNAPC) for concentration tracking of a
CSTR. The algorithm basically seeks to minimize the prediction error over the training
data test. In order to have a good training, the data must contain sufficient information
about the system dynamics.
In comparison with others previous published, our controller does not present the
disadvantage of the controller proposed by A. Velasco-Perez et al., 2011, Monroy-
Loperena et. al., 2004; Alvarez-Ramirez et. al., 2004; where among other things, you
must factorize the transfer function of the plant and solve optimization problems to
obtain final control inputs to implement.
In this work a trajectory-tracking controller, designed originally for robotic systems
(Scaglia et al. 2008; Scaglia et al. 2009; Scaglia et al. 2010; Rosales et al. 2011), is
applied to Continuously Stirred Tank Reactor (CSTR) Systems.

VII CAIQ 2013 y 2das JASP
AAIQ, Asociación Argentina de Ingenieros Químicos - CSPQ
The main contribution of this control approach is the application of a novel control
technique based on Linear Algebra, to design control algorithms for the trajectory
tracking of a CSTR system.
The control objective is described as given a desired trajectory for the reactor
effluent concentration, Ca,ref, find a value for the control action (coolant flow rate, qc)
needed to force the system output to go from its current state to a desired one.
The main advantage is that, knowing the system model only needs Ca,ref to calculate
the control action, and the calculation of this control actions, are obtained solving a
system of linear equations. The methodology is based on the search for conditions under
which a system of linear equations has an exact solution, to generate a tracking error
tending to zero.
The response of the CSTR system is compared with its reference model for a variety
of step changes in the desired set point covering the operating range from 0.08 to 0.12
mol/l is obtained.
Furthermore, the algorithm developed is easier to be implemented in a real system
because the use of discrete equations allows direct adaptation to any computer system or
programmable device running sequential instructions to a programmable clock speed.
In this paper uses a generic model of CSTR where the irreversible, exothermic
chemical reaction, , occurs and the reactor has a cooling jacket (Aris and
Amundson, 1958; Uppal et al., 1974; Alvarez-Ramirez, 1994; Viel et al., 1997).
Besides, it is shown how to solve a misgiven parameter‟s error by modifying the
sample time.
Moreover, using Monte Carlo method the system behavior is analyzed when it has
modeling errors. By utilizing an integrator in each state variable, ensures the
convergence to zero of tracking errors against modeling errors.
In addition, the proposed methodology is validated and discussed through computer
simulations which show the effectiveness of the proposed controller.
The paper is organized as follows: Section 2, describes the methodology for the
design of a control system, using Linear Algebra. Section 3 shows the CSTR model
(Lightbody et al., 1995; Ge et al., 1998; Bequette Wayne B., 2002), Section 4 shows the
design of the controller for the CSTR proposed, Section 5 shows the results of the

VII CAIQ 2013 y 2das JASP
AAIQ, Asociación Argentina de Ingenieros Químicos - CSPQ
simulation, by applying the methodology proposed in the CSTR example. Finally,
Section 6 presents the conclusions obtained in this work and some topics that will be
addressed in future contributions.
2. Methodology for Controller Design
2.1. Nomenclature and Design Methodology
Let us consider the first-order differential equation,
( ) ( ) (1)
In Equation (1) y represents the output to the system to be controlled, u is the control
action, and t is the time. The values of y(t) at discrete time t=nT0, where T0 is the
sampling period and nϵ{0, 1, 2, …}, will be denoted as yn. Thus, when computing yn+1
by knowing yn, Eq. (1) should be integrated over the time interval nT0≤ t ≤(n+1)T0 as
follows:
∫ ( ) ( )
(2)
Where, u remains constant during the interval nT0≤ t ≤(n+1)T0. Therefore, if one
knows beforehand the reference trajectory (referred to as yref(t)) to be followed by y(t),
then yn+1 can be substituted by yref(n+1) into Eq. (2), then it is possible to calculate un that
represents the control action required to go from the current state to the desired one.
There are several numerical integration methods to calculate the integral in Eq. (2).
For example, the Euler method approaches can be used,
( ) (3)
The use of numerical methods in the simulation of the system is based mainly on the
possibility to determine the state of the system at instant n+1 from the state, the control
action, and other variables at instant n. So, yn+1 can be substituted by a function of
reference trajectory and then the control action to make the output system evolve from
the current value (yn) to the desired one can be calculated. To accomplish this, it is
necessary to solve a system of linear equations for each sampling period, as shown in

VII CAIQ 2013 y 2das JASP
AAIQ, Asociación Argentina de Ingenieros Químicos - CSPQ
next Section. This represents an important advantage mainly for two reasons, first for
complex systems (linear or nonlinear), the equations can be solved using iterative
methods for solving systems of linear equations, which only need an initial value to start
the iteration. This value may be precisely the estimate calculated in the previous
sampling instant. Second, this methodology can be applied to other types of systems and
the accuracy required by the numerical method is less than the one needed to simulate
the behavior of the system under study. This is because, when state variables are
available for feedback, at each sampling instant, the method corrects any differences
caused by the cumulative error (for example, "rounding errors"). So, the approximation
is used to find the best way to go from one state to the next, according to the availability
of the system model.
3. CSTR Model
The continuously stirred tank reactor (CSTR) system given by Lightbody et al.,
1995; Ge et al.,1998; Bequette Wayne B., 2002 is shown in Figure 1.
This system consists of a constant volume reactor cooled by a single coolant stream
flowing in a co-current mode. The irreversible, exothermic reaction, , occurs in
the tank. Because of the reaction is exothermic, the producing heat acts to slow the
reaction down. By introduction of a coolant flow rate qc the temperature can be varied
and hence the product concentration controlled.
Figure 1. Continuous stirred tank reactor (CSTR) with a cooling jacket
q
Ca0
Tf
qc
Tcf
qc
Ca
Ta

VII CAIQ 2013 y 2das JASP
AAIQ, Asociación Argentina de Ingenieros Químicos - CSPQ
The following modeling assumptions are commonly made:
- Perfect mixing in reactor and jacket.
- Constant volume reactor and jacket.
- Reactor working at steady state therefore, their properties do not vary with
time.
- Because of the perfect mixing within the reactor, the properties of the reactant
mixture are considered uniform anywhere within the vessel and thus are
identical to the properties of the output current
With all these simplifications, the process is described by the following continuous-
time, nonlinear, simultaneous, differential equations:
( )
(4)
( )
[
] ( )
Where variables Ca and Ta are the concentration and temperature of the tank,
respectively; the coolant flow rate qc is the control input; and the parameters of the
system are given in the Table 1 (see Appendix).
4. Controller Design
The control objective is described as given a desired trajectory for the reactor
effluent concentration, Ca,ref, find a value for the control action (coolant flow rate, qc) so
that the reactor effluent concentration, Ca, can follow the pre-established trajectory.
The response of the CSTR system is compared with its reference model for a variety
of step changes in the desired set point covering the operating range from 0.08 to 0.12
mol/l.
From (2) and (4) it follows,

VII CAIQ 2013 y 2das JASP
AAIQ, Asociación Argentina de Ingenieros Químicos - CSPQ
∫ (
( )
( )
)
(5)
∫
( )
( )
*
+ ( )
Through the Euler‟s approximation of the nonlinear model of the CSTR system (5),
the following set of equations is obtained:
(
( )
)
(6)
(
( )
[
] ( )
Calling Xcn as:
[
] (7)
And writing the equations in matrix form:
[
]
[
( )
( )
( ) ]
(8)
Now we will consider the problem of designing a control law capable of generating
the signal Xcn (and therefore qcn), with the objective that the reactor effluent
concentration, Ca, follows the reference trajectory (Ca,ref,). To calculate Xcn the system
of equations (8) must have an exact solution.
Then, the condition for the system (8) to have an exact solution is that the first
equation is equal to zero, i.e.

VII CAIQ 2013 y 2das JASP
AAIQ, Asociación Argentina de Ingenieros Químicos - CSPQ
(
( )
) (9)
It is important to remark that the value of the difference between the reference and
real trajectory will be called tracking error. It is given by:
(10)
Then, the following equations are defined,
( ) (11)
( ) (12)
Where Tadn represents the necessary reactor temperature, so that (8) has exact
solution.
Then, by replacing Eq. (11) and Eq. (12) in Eq.(8):
[
]
[ ( )
( )
( )
( )
( ) ]
(13)
For the system of equations (8) has exact solution should comply that the reactor
temperature (Tan):
* ( ( )
)
( )+ ( )
(14)
The value obtained from Eq. (14) represents the temperature must have the reactor to
follows the reference concentration (Ca,ref) and named Tad.
From the second equation of (13) it is obtain:

VII CAIQ 2013 y 2das JASP
AAIQ, Asociación Argentina de Ingenieros Químicos - CSPQ
( )
( )
( )
(15)
The value of Xcn represent the control action necessary so that the reactor effluent
concentration Ca, follows the pre-established trajectory (Ca,ref,).
5. Simulations Results
In this section, we carry out computer simulations to demonstrate the performance of
our tracking controller. The control approach is applied on the original time-continuous
system. The CSTR configuration is obtained from Lightbody et al., 1995; Ge et
al.,1998; Bequette Wayne B., 2002. It has all its parameters meeting in Table 1 (See
Appendix). The reference trajectory is a linear model with a variety of step changes in
the desired set point covering the operating range from 0.08 to 0.12 mol/l about the
steady-state nominal concentration of 0.1 mol/l. Then, a value of 0.1 minute was
chosen for the sampling time T0 of the simulation. The values of the controller
parameters are:
[ ] [ ] (16)
And the initial condition of the CSTR simulation is:
[ ] [ ] (17)
The trajectory in Ca versus time along, with their respective reference value (Ca,ref)
are shown in Fig. 2 a). This demonstrates how the reactor effluent concentration tends to
the reference trajectory quickly and then continues without undesirable oscillations,
then the tracking error tends to zero as shown in Fig. 2 b).
Figure 3 a) shows the control action required to drive this plant to follow the linear
reference model for the same sequence of set points. As can be seen the coolant flowrate
is well behaved, without any undesirable oscillations.

VII CAIQ 2013 y 2das JASP
AAIQ, Asociación Argentina de Ingenieros Químicos - CSPQ
In addition, Fig. 3 b) shows the temperature which adopts the reactor over time, this
temperature is equal to the output current.
Therefore the performance of the tracking system is satisfactory.
(a) (b)
Figure 2. a) Tracking Trajectory Ca vs Time; b) Tracking Error vs Time.
(a) (b)
Figure 3. a) Control Action vs. Time; b) Reactor Temperature vs. Time.
5.1 System Response to Modeling Errors
We analyze the case when the system presents modeling errors. Two methodologies
are proposed and analyzed the results when there is a parametric uncertainty in the
values of a1, a2 and a3 (see Appendix).
5.1.1 Modification of Sampling Time
This method introduces a 10% error in the model parameters (above and below its
nominal values) and tries to reduce the error that shows the system response to these
modeling errors by sampling time decrease and controller gains, taking the new ranges
of values:
0 10 20 30 40 50 60
0.08
0.09
0.1
0.11
0.12
Time (min)
Ca (
mol/
l)
Ca
Ca,ref
10 12 14 16 18
0.08
0.085
0.09
0.095
Ca
Ca,ref
Zoom View
0 10 20 30 40 50 60-0.015
-0.01
-0.005
0
0.005
0.01
0.015Tracking Error
Time (min)
Ca
-Ca
ref
(mo
l/l)
0 10 20 30 40 50 600
20
40
60
80
100
120
140
Time (min)
qc (
l/m
in)
0 10 20 30 40 50 60430
435
440
445
Time (min)
Ta
(K
)

VII CAIQ 2013 y 2das JASP
AAIQ, Asociación Argentina de Ingenieros Químicos - CSPQ
[ ]
[ ] (18)
[ ]
(19)
Figure (4) shows a very favorable response of the system in Ca (a) with tracking error
tends to zero (b).
(a) (b)
Figure 4. a) Tracking Trajectory Ca vs Time; b) Tracking Error vs Time.
5.1.2 Application of Monte Carlo Sampling Experiment.
The Monte Carlo method is usually used to find the controller parameters so as to
obtain a tracking error tend to zero.
However, also be applied to make an analysis of the system in case of appearing
modeling errors. In this section is analyzed the controller's performance by simulation
when the controller parameters vary according to the Monte Carlo experiment.
We introduce a determined error in the model parameters (above and below their
nominal values) and perform 100 simulations (N = 100). In each simulation the
controller parameters are chosen in a random way by Monte Carlo based sampling
experiment (AuatCheein and Carelli, 2012).
0 10 20 30 40 50 60
0.09
0.1
0.11
0.12
0.13System Response to Modeling Errors
Time (min)
Ca
(m
ol/
l)
Ca
Ca,ref
11 12 130.08
0.085
Zoom View
0 10 20 30 40 50 60-2
-1
0
1
2
3x 10
-3
Time (min)
Ca -
Ca,r
ef
(mol/
l))

VII CAIQ 2013 y 2das JASP
AAIQ, Asociación Argentina de Ingenieros Químicos - CSPQ
It is observed that the performance of controller designed with the technique
proposed in this paper, remains very satisfactory in the following ranges of variation:
[ ]
[ ] (20)
[ ]
For 100 iterations and whit these parametric uncertainties, the system response and
tracking error can be seen in Fig. 5 a) and b), respectively. While random values that
take the parameters in each of the 100 simulations are shown in Fig. 6 a), b) and c):
(a) (b)
Figure 5. a) Tracking Trajectory Ca vs Time; b) Tracking Error vs Time.
(a) (b)
(C)
Figure 6. Parameters Random Values in Monte Carlo Experiment a) a1; b) a2; c) a3
0 10 20 30 40 50 60
0.08
0.09
0.1
0.11
0.12
0.13
Time (min)
Ca
(m
ol/l)
22 23 24
0.116
0.118
0.12
Ca ref
Zoom View
0 10 20 30 40 50 600
0.002
0.004
0.006
0.008
0.01
0.012
Time (min)
Ca-C
aref (m
ol/l)
3 3.5 4 4.5 5 5.5
0
2
4
6
x 10-4
Zoom View
0 10 20 30 40 50 60 70 80 90 1001.44
1.44
1.44
1.44
1.44
1.44
1.44x 10
13
Iterations
a1
0 10 20 30 40 50 60 70 80 90 100650
700
750
Iterations
a2
0 10 20 30 40 50 60 70 80 90 1000.01
0.01
0.01
0.01
0.01
Iterations
a3
VII CAIQ 2013 y 2das JASP
AAIQ, Asociación Argentina de Ingenieros Químicos - CSPQ
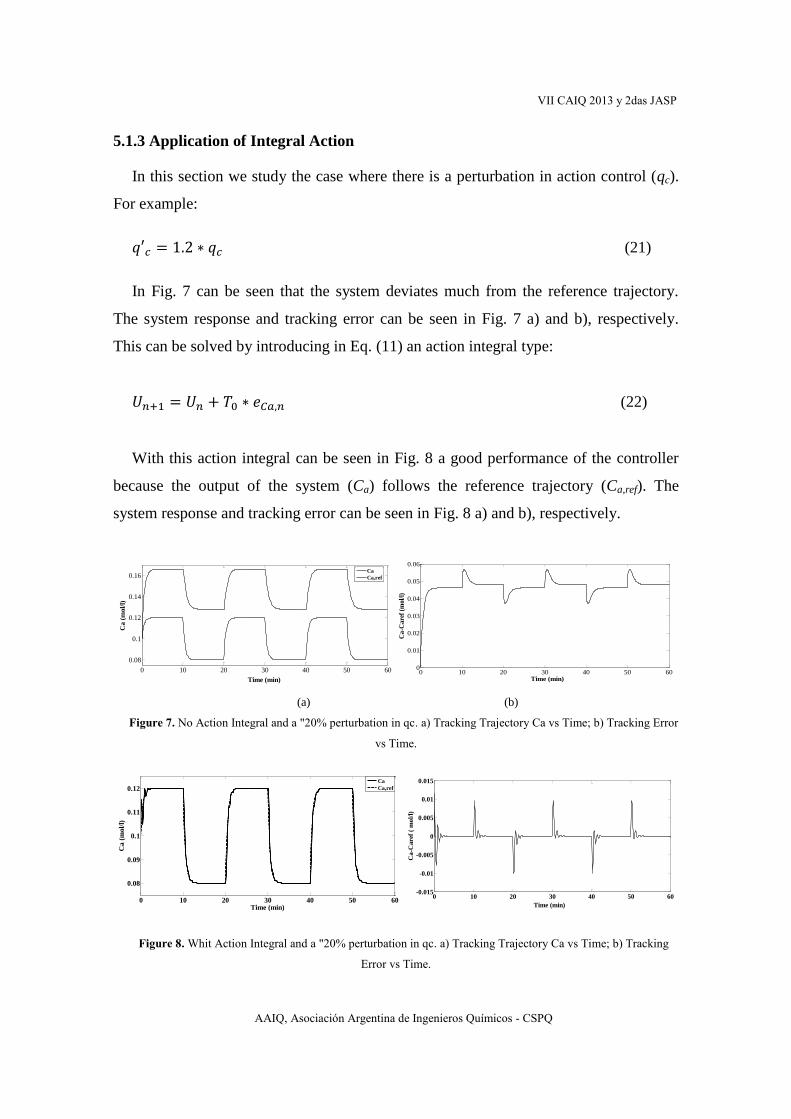
5.1.3 Application of Integral Action
In this section we study the case where there is a perturbation in action control (qc).
For example:
(21)
In Fig. 7 can be seen that the system deviates much from the reference trajectory.
The system response and tracking error can be seen in Fig. 7 a) and b), respectively.
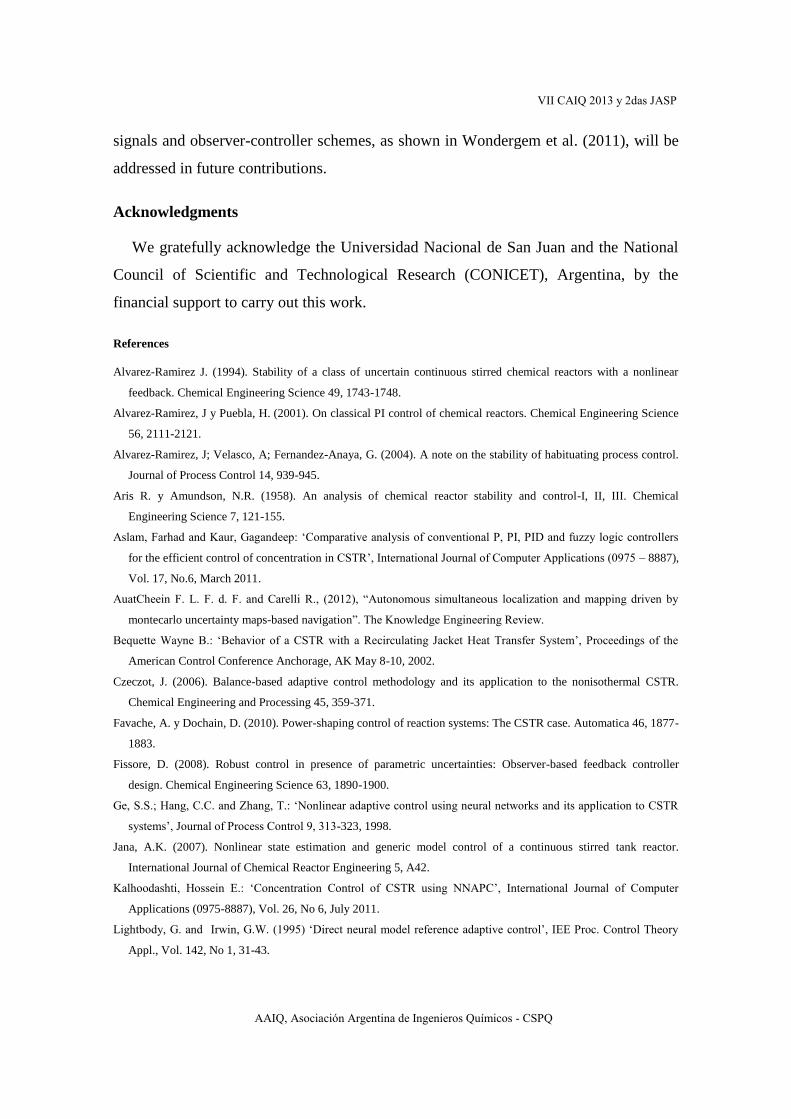
This can be solved by introducing in Eq. (11) an action integral type:
(22)
With this action integral can be seen in Fig. 8 a good performance of the controller
because the output of the system (Ca) follows the reference trajectory (Ca,ref). The
system response and tracking error can be seen in Fig. 8 a) and b), respectively.
(a) (b)
Figure 7. No Action Integral and a "20% perturbation in qc. a) Tracking Trajectory Ca vs Time; b) Tracking Error
vs Time.
Figure 8. Whit Action Integral and a "20% perturbation in qc. a) Tracking Trajectory Ca vs Time; b) Tracking
Error vs Time.
0 10 20 30 40 50 60
0.08
0.1
0.12
0.14
0.16
Time (min)
Ca (
mol/
l)
Ca
Ca,ref
0 10 20 30 40 50 600
0.01
0.02
0.03
0.04
0.05
0.06
Time (min)
Ca-C
are
f (m
ol/
l)
0 10 20 30 40 50 60
0.08
0.09
0.1
0.11
0.12
Ca
Time (min)
Ca
(m
ol/
l)
Ca
Ca,ref
0 10 20 30 40 50 60-0.015
-0.01
-0.005
0
0.005
0.01
0.015
Time (min)
Ca-C
are
f (
mol/
l)

VII CAIQ 2013 y 2das JASP
AAIQ, Asociación Argentina de Ingenieros Químicos - CSPQ
6. Conclusions
In this paper, the trajectory tracking problem of the Continuously Stirred Tank
Reactor (CSTR) Systems has been considered. The main contribution of this work is a
new methodology to design control algorithms for trajectory tracking of a CSTR based
on Linear Algebra. The methodology is based on the search for conditions under which
a system of linear equations has an exact solution. These conditions establish the desired
values of temperature and finally the control actions (coolant flow rate, qc) for that the
tracking error goes to zero. One advantage of the methodology applied is that knowing
the system model only needs Ca,ref to calculate the control actions.
Simulation results show the effectiveness of the proposed controller. Besides, when
the system‟s behavior is tested to modeling errors by the modification of sampling time
and Monte Carlo sampling experiment it can be seen that the performance of controller
designed with the technique proposed in this paper, remains very satisfactory. Similarly,
when there is a disturbance of 20% in the control action and introducing an integral
action can be seen a very good performance of the controller.
The developed methodology for the controller design in this work has been
successfully applied to several nonlinear multivariable systems, where it is experimental
and simulation results, as seen in Serrano et al., 2013, Scaglia et al. 2010; Rosales et al.
2011, among others. In comparison with others previous published, our controller does
not present the disadvantage of the controller proposed by A. Velasco-Perez et al., 2011;
Monroy-Loperena et. al., 2004; Alvarez-Ramirez et. al., 2004; where among other
things, you must factorize the transfer function of the plant and solve optimization
problems to obtain final control inputs to implement.
This tracking controller presents the advantages of being easy to design and to
implement, which favors the implementation of algorithms on hardware dedicated to
process control study. The algorithm can be implemented directly on microcontrollers
without the need to implement it on an external computer, because the simple
calculations by standard algebraic-numerical techniques are used to perform.
The developed methodology for the controller design can be applied to other types of
systems. The possibility to include in the controller design the saturation of the control
VII CAIQ 2013 y 2das JASP
AAIQ, Asociación Argentina de Ingenieros Químicos - CSPQ
signals and observer-controller schemes, as shown in Wondergem et al. (2011), will be
addressed in future contributions.
Acknowledgments
We gratefully acknowledge the Universidad Nacional de San Juan and the National
Council of Scientific and Technological Research (CONICET), Argentina, by the
financial support to carry out this work.
References
Alvarez-Ramirez J. (1994). Stability of a class of uncertain continuous stirred chemical reactors with a nonlinear
feedback. Chemical Engineering Science 49, 1743-1748.
Alvarez-Ramirez, J y Puebla, H. (2001). On classical PI control of chemical reactors. Chemical Engineering Science
56, 2111-2121.
Alvarez-Ramirez, J; Velasco, A; Fernandez-Anaya, G. (2004). A note on the stability of habituating process control.
Journal of Process Control 14, 939-945.
Aris R. y Amundson, N.R. (1958). An analysis of chemical reactor stability and control-I, II, III. Chemical
Engineering Science 7, 121-155.
Aslam, Farhad and Kaur, Gagandeep: „Comparative analysis of conventional P, PI, PID and fuzzy logic controllers
for the efficient control of concentration in CSTR‟, International Journal of Computer Applications (0975 – 8887),
Vol. 17, No.6, March 2011.
AuatCheein F. L. F. d. F. and Carelli R., (2012), “Autonomous simultaneous localization and mapping driven by
montecarlo uncertainty maps-based navigation”. The Knowledge Engineering Review.
Bequette Wayne B.: „Behavior of a CSTR with a Recirculating Jacket Heat Transfer System‟, Proceedings of the
American Control Conference Anchorage, AK May 8-10, 2002.
Czeczot, J. (2006). Balance-based adaptive control methodology and its application to the nonisothermal CSTR.
Chemical Engineering and Processing 45, 359-371.
Favache, A. y Dochain, D. (2010). Power-shaping control of reaction systems: The CSTR case. Automatica 46, 1877-
1883.
Fissore, D. (2008). Robust control in presence of parametric uncertainties: Observer-based feedback controller
design. Chemical Engineering Science 63, 1890-1900.
Ge, S.S.; Hang, C.C. and Zhang, T.: „Nonlinear adaptive control using neural networks and its application to CSTR
systems‟, Journal of Process Control 9, 313-323, 1998.
Jana, A.K. (2007). Nonlinear state estimation and generic model control of a continuous stirred tank reactor.
International Journal of Chemical Reactor Engineering 5, A42.
Kalhoodashti, Hossein E.: „Concentration Control of CSTR using NNAPC‟, International Journal of Computer
Applications (0975-8887), Vol. 26, No 6, July 2011.
Lightbody, G. and Irwin, G.W. (1995) „Direct neural model reference adaptive control‟, IEE Proc. Control Theory
Appl., Vol. 142, No 1, 31-43.

VII CAIQ 2013 y 2das JASP
AAIQ, Asociación Argentina de Ingenieros Químicos - CSPQ
Ma, K.M., Valdes-Gonzalez, H. y Bogle, I.D.L. (2010) Process design in SISO systems with input multiplicity using
bifurcation analysis and optimization. Journal of Process Control 20, 241-247.
Melo, P.A., Biscaia, E.C., Pinto, J.C. (2003). The bifurcation behavior of continuous freeradical solution loop
polymerization reactors. Chemical Engineering Science 58, 2805-2821.
Monroy-Loperena, R., Solar, R. y Alvarez-Ramirez, J. (2004). Balanced control scheme for reactor/separator
processes with material recycle. Industrial & Engineering Chemistry Research 43, 1853-1862.
Ogunnaike, B.A. y Ray, W.H. (1994). Process Dynamics, Modeling and Control. Oxford University Press, New
York.
Paladino, O. y Ratto, M. (2000). Robust stability and sensitivity of real controlled CSTRs. Chemical Engineering
Science 55, 321-330.
Pan, T.H., Li, S.Y. y Cai, W.J. (2007). Lazy learningbased online identification and adaptive PID control: A case
study for CSTR process. Industrial & Engineering Chemistry Research 46, 472-480.
Perez, M. y Albertos, M. (2004). Self-oscillating and chaotic behavior of a PI-controlled CSTR with control valve
saturation. Journal of Process Control 14, 51-59.
Prakash, J. y Senthil, R. (2008). Design of observer based nonlinear model predictive controller for a continuous
stirred tank reactor. Journal of Process Control 18, 504-514.
Prakash, J. y Senthil, R. (2008). Design of observer based nonlinear model predictive controller for a continuous
stirred tank reactor. Journal of Process Control 18, 504-514.
Prakash, J. y Srinivasan, K. (2009). Design of nonlinear PID controller and nonlinear model predictive controller for
a continuous stirred tank reactor. ISA Transactions 48, 273-282.
Rosales A., Scaglia G.J.E., Mut M. and Di Sciascio F. (2011). Formation control and trajectory tracking of mobile
robotic systems – a Linear Algebra approach. Robotica, v. 29, pp. 335-349.
Scaglia G.J.E., Quintero L., Mut V. and Di Sciascio F. (2008). Numerical methods based controller design for mobile
robots. Proceedings of the 17th World Congress and the International Federation of Automatic Control (IFAC),
Seoul, Korea, July 6-11, 2008, pp. 4820-4827.
Scaglia G.J.E., Quintero L., Mut V. and Di Sciascio F. (2009). Numerical Methods Based Controller Design for
Mobile Robots. Robotica, Volume 27, Issue 02, pp. 269-279.
Scaglia G.J.E., Rosales A., Quintero L., Mut V. and Agarwal R. (2010). A Linear-Interpolation-based Controller
Design for Trajectory Tracking of Mobile Robots. Control Engineering Practice, v. 18, pp. 318–329.
Serrano E., Scaglia G., Cheein F. A., Mut V., Ortiz O., (2013), “Trajectory Tracking Controller Design with
Constrains in the Control Signals: a case study in mobile robots”, Robotica.
Serrano M. E., Scaglia G., Mut V., Ortiz O. and Godoy S., (2013), “Trajectory Tracking of Underactuated Surface
Vessels: a Linear Algebra Approach”, IEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, doi:
0.1109/TCST.2013.2271505.
Uppal, A., Ray, W.H. y Poore, A.B. (1974). On the dynamic behavior of continuous stirred tank reactors. Chemical
Engineering Science 29, 967-985.
Velasco-Pérez, A., Álvarez-Ramírez, J. and Solar-González, R.: „Multiple Input - Single Output (MISO) Control of a
CSTR‟. Revista Mexicana de Ingeniería Química, Vol. 10, No. 2, 321-331, Abril 2011.
Viel, F., Jadot, F. y Bastin, G. (1997). Global stabilization of exothermic chemical reactors under input constraints.
Automatica 33, 1437-1448.

VII CAIQ 2013 y 2das JASP
AAIQ, Asociación Argentina de Ingenieros Químicos - CSPQ
Vojtesek and Dostal: „Simulation of Adaptive Control of Continuous Stirred Tank Reactor‟, Review scientific paper,
Int j simul model 8 (2009) 3, 133-144, ISSN 1726-4529.
Wondergem M., Lefeber E., Pettersen K. Y., and Nijmeijer H. (2011). Output Feedback Tracking of Ships. IEEE
Transactions on Control Systems Technology, vol. 19, no. 2.
Yazdi, M.B. y Jahed-Motlagh, M.R. (2009). Stabilization of a CSTR with two arbitrarily switching modes using
modal state feedback linearization. Chemical Engineering Journal 155, 838-843.
Appendix
Table 1. Parameters of the mathematical model of the CSTR
Parameter Description Nominal Value
q Process flowrate 100 ml/min
Ca0 Concentration of component A 1 mol/l
Tf Feed temperature 350 K
Tcf Inlet coolant temperature 350K
V Volume of tank 100 l
ha Heat transfer coefficient 7x105 J/min K
a0 Preexponential factor 7.2x1010
min-1
E/R Activation energy 1x104 K
(-ΔH) Heat of reaction 2x104 cal/mol
ρ1, ρc Liquid densities 1x103 g/l
Cp, Cpc Heat capacities 1 cal/g K
Model parameter
Model parameter
Model parameter
Where a1, a2 and a3 they are:
( )
;
;