universidad nacional de san juan - facultad de ingeniería...
TRANSCRIPT

Universidad Nacional de San Juan - Facultad de Ingeniería DEPARTAMENTO DE ELECTRONICA Y AUTOMATICA
Carrera: Ingeniería Electrónica Área CONTROL
Asignatura: CONTROL I GGUUIIAA DDEE AAPPRREENNDDIIZZAAJJEE YY AAUUTTOOEEVVAALLUUAACCIIOONN UNIDAD DE APRENDIZAJE Nº 3
“ANALISIS DE RESPUESTA TEMPORAL DE SISTEMAS LINEALES Y AUTONOMOS”
PRÁCTICO Nº 5

Unidad 3 Practico5 1
1-Objetivos generales: A finalizar la unidad el alumno deberá: 1.1 Conocer el concepto de respuesta temporal de sistemas de control
lineales y su forma de obtención utilizando entradas determinísticas a los mismos.
1.2 Distinguir que la respuesta temporal de sistemas de control lineales autónomos consta de dos partes: la solución particular o de estado permanente y la solución complementaria o de estado transitorio.
1.3 Conocer y comprender el concepto de estabilidad absoluta de un sistema de control y su determinación a partir de la localización de las raíces de la ecuación característica del sistema y mediante los criterios algebraicos de Routh-Hurwitz.
1.4 Entender el concepto de estabilidad condicional cuando hay un parámetro variable aplicando el criterio de Routh-Hurwitz.
1.5 Conocer la respuesta temporal de sistemas de primer y segundo orden resolviendo la ecuación diferencial que lo representa por el método clásico y mediante el uso de la transformada de Laplace para entradas de excitación de tipo escalón, rampa y senoidal.
1.6 Conocer como se determina la respuesta temporal transitoria de un sistema lineal de segundo orden.
1.7 Conocer la forma de la respuesta de sistemas de segundo orden lineales para entradas determinísticas en función del coeficiente de amortiguamiento del sistema
1.8 Conocer como se determina la respuesta temporal de sistemas lineales de orden elevado, descomponiendo la ecuación diferencial en fracciones simples y utilizando la transformada y antitransformada de Laplace.
1.9 Analizar los efectos de agregar polos y ceros a las funciones de transferencia del sistema.
1.10 Reconocer y diferenciar claramente los conceptos de tipo y orden de un sistema definido solo para sistemas con realimentación unitaria.
1.11 Distinguir el calculo del error para sistemas con realimentación unitaria y no unitaria (utilización de un sistema con realimentación unitaria equivalente)
1.12 Interpretar la diferencia entre la señal de referencia y la señal de entrada a un sistema de control.
1.13 Diferenciar entre el error verdadero E(S) y el error actuante o señal activa Ea(S)
Unidad 3 Practico5 2
1.14 Calcular el error de estado estacionario por medio de los coeficientes de error de estado estacionario para sistemas con realimentación unitaria y mediante el uso de la Gequivalente para sistemas con realimentación no unitaria y a través de los coeficientes del numerador y denominador de la Función de Transferencia de Lazo Cerrado para sistemas generales (con o sin realimentación unitaria).
1.15 Reconocer las acciones básicas de control y las estructuras de los controladores automáticos industriales más utilizados.
1.16 Conocer e interpretar los efectos de las acciones de control proporcional, integral y derivativa, y sus combinaciones posibles, en el comportamiento del sistema.
1.17 Manejar el software utilizado para la simulación de sistemas y procesos usados en el diseño y análisis de los sistemas de control.
2- Objetivos específicos. Al finalizar la unidad el alumno podrá: 2.1 Explicar cómo realiza en forma experimental y analítica el análisis de la
respuesta temporal de sistemas lineales y autónomos. 2.2 Explicar que entrada determinística de excitación (escalón, rampa,
senoidal, etc.) usa en cada caso y justificarlo. 2.3 Determinar la respuesta temporal de un sistema de control autónomo
describiendo la solución particular y la solución complementaria de la ecuación diferencial que lo representa.
2.4 Relacionar la solución particular con la entrada de excitación usada y con el estado permanente del sistema analizado.
2.5 Relacionar la solución complementaria con la ecuación características del sistema analizado y con el estado transitorio del mismo.
2.6 Definir la estabilidad absoluta de un sistema de control lineal autónomo según la localización en el plano “s” de las raíces de la ecuación características del sistema y mediante el criterio de Routh-Hurwitz.
2.7 Entender el concepto de estabilidad condicional o relativa, y encontrar el rango de estabilidad de algún parámetro variable aplicando el criterio de Routh-Hurwitz.
2.8 Diferenciar el comportamiento de un sistema de control lineal
autónomo estable de uno inestable, y de uno oscilatorio.

Unidad 3 Practico5 3
2.9 Definir cuales son las raíces dominantes de la ecuación características de un sistema, y su relación con la posibilidad de simplificar el modelo matemático del mismo.
2.10 Encontrar la respuesta temporal de un sistema de primer orden, resolviendo la ecuación diferencial del sistema para entradas de excitación de tipo escalón y rampa.
2.11 Encontrar la respuesta temporal de un sistema de segundo orden, resolviendo la ecuación diferencial del sistema para entradas de excitación de tipo escalón y rampa, especificando además los distintos casos de respuesta transitoria a obtener de acuerdo con la localización de las raíces de la ecuación características en el plano “s”.
2.12 Encontrar la respuesta temporal de sistemas de primer y segundo orden para entradas de excitación de tipo escalón, rampa y senoidal haciendo uso de la transformada y antitransformada de Laplace.
2.13 Encontrar la respuesta temporal de un sistema de segundo orden usando como parámetros el factor de amortiguamiento δ del sistema y la frecuencia natural de oscilación sin amortiguamiento nω del mismo.
2.14 Definir para que valores del coeficiente de amortiguamiento δ el sistema de segundo orden tiene respuestas transitorias sobreamortiguadas, amortiguadas críticas, subamortiguadas y oscilatorias.
2.15 Dibujar y nombrar las curvas universales de respuesta temporal de un sistema de segundo orden para una entrada de excitación de tipo escalón.
2.16 Determinar la respuesta temporal de un sistema de orden elevado, descomponiéndolo en fracciones parciales simples usando la transformada de Laplace.
2.17 Relacionar los valores de los residuos calculados, al descomponer la ecuación del sistema en fracciones simples, con los coeficientes de los términos de la solución transitoria.
2.18 Relacionar los valores de los residuos calculados, al descomponer la ecuación del sistema en fracciones simples, con los polos y ceros de la función de transferencia de lazo cerrado.
2.19 Diferenciar que la estabilidad del sistema depende únicamente de la posición de los polos del sistema, pero que los ceros ayudan a definir la forma definitiva de la respuesta.
2.20 Describir las especificaciones de la respuesta transitoria de un sistema de segundo orden subamortiguado para una entrada de excitación de tipo escalón.

Unidad 3 Practico5 4
2.21 Definir cada una de las especificaciones antes descritas en función del coeficiente de amortiguamiento δ y de la frecuencia natural de oscilación sin amortiguamiento nω del sistema.
2.22 Definir el error de estado estacionario de un sistema de control analógico lineal autónomo.
2.23 Explicar la relación del error de estado estacionario con la entrada de excitación del sistema y con las características del mismo.
2.24 Definir el tipo de sistema según el número de integradores puros existentes en la función de transferencia de lazo abierto del sistema.
2.25 Determinar el orden de un sistema de acuerdo al agrado de la ecuación característica del mismo.
2.26 Determinar el error de estado estacionario para sistemas con realimentación unitaria para entradas de excitación de tipo escalón, rampa y aceleración, definiendo las especificaciones de diseño denominadas constante de error estático de posición pk , de velocidad
vk y de aceleración ak 2.27 Determinar el error de estado estacionario para sistemas con
realimentación no unitaria mediante los coeficientes de error de posición kp, kv, ka.
2.28 Valorar para que tipo de sistema y para que tipo de entrada de
excitación el error de estado estacionario sse será nulo, de valor finito o infinito, y además determinar el significado físico del valor de sse .
2.29 Reconocer entre δ , nω , pk , vk , ak y sse cuales son especificaciones de lazo abierto y cuales de lazo cerrado y justificar claramente su clasificación.
2.30 Calcular el error de estado estacionario mediante el uso de la Gequivalente para sistemas con realimentación no unitaria y a través de los coeficientes del numerador y denominador de la Función de Transferencia de Lazo Cerrado para sistemas generales (con o sin realimentación unitaria).
2.31 Analizar las distintas acciones básicas de control utilizadas en los
controladores industriales analógicos. 2.32 Determinar las diferentes estructuras de controladores industriales
analógicos existentes (P, PI, PD, PID), su facilidad de aplicación en distintos casos sus efectos en el comportamiento del sistema.
Unidad 3 Practico5 5
2.33 Enunciar los requerimientos matemáticos que se deben exigir en una computadora analógica para poder resolver ecuaciones diferenciales lineales invariantes en el tiempo.
3- Contenidos: 3.1 Respuesta temporal de sistemas de control analógicos lineales
autónomos. 3.1.1 Introducción a la determinación de respuesta temporal de sistemas de
control analógicos lineales autónomos. 3.1.2 Señales de excitación o prueba típicas. 3.1.3 Respuesta temporal del sistema en estudio ante determinada señal de
excitación. 3.1.4 Conclusiones. 3.2 Solución clásica de las ecuaciones del sistema 3.2.1 Introducción 3.2.2 Requerimientos para una respuesta temporal estable. 3.2.3 Obtención de la estabilidad absoluta de un sistema mediante la
ubicación de las raices de la ecuación característica y mediante el criterio de Routh-Hurwitz
3.2.4 Concepto de estabilidad relativa y obtención del rango de estabilidad de algún parámetro variable mediante el criterio de Routh-Hurwitz.
3.2.5 Resumen. 3.2.6 Respuesta temporal de un componente simple de primer orden. 3.2.7 Respuesta temporal de un componente de segundo orden. 3.2.8 Respuesta temporal de un sistema de segundo orden en función de los
parámetros δ y nω . 3.3 Obtención de la respuesta temporal de un sistema mediante el uso de
la transformada de Laplace. 3.3.1 Introducción 3.3.2 La transformada de Laplace de funciones del tiempo. 3.3.3 Transformada de Laplace de funciones escalón, rampa y senoidal. 3.3.4 Teoremas de la transformación de Laplace. 3.3.5 Transformación inversa de Laplace. 3.3.6 Método de desarrollo en fracciones parciales para hallar transformadas
inversas de Laplace. 3.3.7 Desarrollo en fracciones parciales cuando la transformada )(sF solo
tiene polos reales. 3.3.8 Desarrollo en fracciones parciales cuando la transformada )(sF tiene
polos complejos conjugados.
Unidad 3 Practico5 6
3.3.9 Desarrollo en fracciones parciales cuando la transformada )(sF tiene polos múltiples.
3.3.10 Procedimiento para obtener la respuesta temporal de un sistema por el método de la transformada de Laplace. Uso de tablas de transformación basadas en δ y nω .
3.3.11 Respuesta temporal de un componente de primer orden por el método de la transformada de Laplace.
3.3.12 Respuesta temporal de un componente de segundo orden por el método de la transformada de Laplace.
3.4 Sistemas de órdenes superiores. 3.4.1 Respuesta temporal a un escalón unitario de un sistema de tercer
orden. 3.4.2 Respuesta transitoria de sistemas de orden superior. 3.4.3 Polos de lazo cerrado dominantes. 3.4.4 Respuesta no oscilatoria de sistemas de orden superior. 3.4.5 Análisis de estabilidad en el plano complejo. 3.5 Definición de especificaciones de respuesta transitoria de un sistema
de control. 3.5.1 Sistemas de segundo orden y especificaciones de respuesta
transitoria. 3.6 Análisis de error de estado permanente para sistemas con
realimentación unitaria sse . 3.6.1 Definición de tipo y orden de un sistema. 3.6.2 Definición de error de estado permanente sse . 3.6.3 Coeficiente de error estático de posición pk . 3.6.4 Coeficiente de error estático de velocidad vk . 3.6.5 Coeficiente de error estático de aceleración ak . 3.6.6 Error en estado estacionario para sistemas con realimentación no
unitaria Error verdadero y Error actuante o Señal Activa. 3.6.7 Cálculo del Error verdadero mediante la Gequivalente para sistemas con
realimentación no unitaria. 3.6.8 Cálculo del Error verdadero mediante los coeficientes de los
polinomios de la Función de Transferencia del Sistema M’(S). 3.6.9 Cálculo del Error Actuante. 3.6.10 Resumen y conclusiones. 3.7 Acciones básicas de control. 3.8 Efecto de las acciones de control P, I y D en el comportamiento del
sistema.

Unidad 3 Practico5 7
4- Diagrama conceptual

Unidad 3 Practico5 8
5- Actividades a desarrollar por el alumno: 1. Leer y comprender en la bibliografía los temas indicados anteriormente en los contenidos. 2. Realizar la actividad de autoevaluación y los ejercicios del Práctico Nº 5 3. Realizar además una práctica de laboratorio correspondiente a este tema, en la cuál se utilizarán los paquetes de software de simulación y diseño ( Simulink – MATLAB - CSAD). 5.1- ACTIVIDAD DE AUTOEVALUACION El alumno deberá responder si o no a las aseveraciones que a continuación se enuncian, luego de leerlas atentamente: 1. Realizar el análisis temporal de un componente de un sistema de control
es variar la entrada del mismo y medir la variación que se produce en la salida del sistema.
2. Más práctico que ensayar el sistema real es hacerlo con el modelo
matemático del mismo. 3. Para realizar un ensayo temporal de un sistema se utilizan señales
determinísticas porque son las únicas a las que se someten los sistemas de control analógicos.
4. La respuesta temporal de un sistema lineal consta de dos partes: la
solución particular y la solución complementaria. 5. La solución particular es la parte de la solución total que siempre perdura
en el tiempo, mientras permanece aplicada la entrada, y tiene la misma forma que ésta.
6. En otros términos, se puede decir que la solución particular es la relación
que existe entre la variable de salida y la variable de entrada a través de la ganancia estática de la función. de transferencia de lazo cerrado.
7. La ecuación característica de un sistema es el denominador de la función
Unidad 3 Practico5 9
de trayecto directo del mismo. 8. La solución complementaria es la parte de la solución total que se
obtiene como solución de la ecuación característica del sistema. 9. Para un sistema de control analógico autónomo, la ecuación
característica del sistema se puede obtener sumando el numerador y el denominador de la función de transferencia de lazo abierto.
10. Es condición indispensable para que un sistema de control analógico sea
estable que todas las raíces dominantes del sistema se localicen en la región izquierda del plano s.
11. Un sistema cuya ecuación característica es de cuarto orden y tiene
localizadas dos raíces en eje real negativo del plano s y las otras dos localizadas sobre el eje imaginario, es estable.
12. Un sistema de control analógico autónomo es siempre estable cuando
las raíces de la ecuación característica están localizadas en la región izquierda del plano s, independientemente del tipo de entrada que se utilice para excitarlo.
13. La respuesta temporal de un sistema se encuentra con menor dificultad
usando el método de la Transformada de Laplace que el de la solución clásica de la ecuación diferencial.
14. Una función que no aparece en tablas de antitransformadas, se puede
descomponer en fracciones parciales que sí aparecen en tablas, sólo cuando el sistema es de orden elevado.
15. Cuando una función de transferencia tiene todos sus polos en el
semiplano izquierdo "s" el sistema es estable, y al descomponer en fracciones simples los residuos de cada polo tendrán una magnitud dependiente de la cercanía del polo al eje imaginario y de la proximidad de algún cero del sistema.
16. Un sistema de elevado orden estable tendrá una respuesta transitoria
cuya duración dependerá fundamentalmente de los polos dominantes del sistema.

Unidad 3 Practico5 10
17. Para un sistema estable, la forma de la respuesta transitoria depende de
los residuos, y el tipo de respuesta depende de la ubicación de los polos de lazo cerrado en el plano "s".
18. Para un sistema estable, los términos de la respuesta de estado
permanente depende de los polos de la entrada R(s) del sistema. 19. Un sistema de segundo orden estable tendrá una respuesta transitoria
cuya forma dependerá de las raíces de la ecuación característica del sistema.
20. Si las raíces de la ecuación característica de un sistema de segundo orden son reales e iguales, el sistema tendrá una respuesta de tipo sobreamortiguado.
21. Si las raíces de la ecuación característica de un sistema de segundo
orden son reales y distintas, el sistema tendrá una respuesta de tipo amortiguado crítico.
22. Si las raíces de la ecuación característica de un sistema de segundo
orden son complejas conjugadas, el sistema tendrá una respuesta de tipo subamortiguado.
23. Si las raíces de la ecuación característica de un sistema de segundo
orden son imaginarias y yacen sobre el eje imaginario, el sistema tendrá una respuesta de tipo oscilatoria de amplitud creciente con el tiempo.
24. Todo sistema de segundo orden subamortiguado tendrá una respuesta
de tipo exponencial y el factor de amortiguamiento δ estará comprendido entre 1 e infinito.
25. Los sistemas de segundo orden por tener respuesta transitoria oscilatoria
son más lentos que los sistemas sobreamortiguados. 26. Los sistemas de segundo orden inestables tienen un factor de
amortiguamiento δ de valor negativo. 27. El máximo sobreimpulso M p de la respuesta transitoria de un sistema de
segundo orden es una función de la frecuencia natural de oscilación sin amortiguamiento ωn y del factor de amortiguamiento δ.

Unidad 3 Practico5 11
28. Todo sistema que tenga ceros de lazo cerrado en el semiplano s
izquierdo ubicados entre el eje imaginario y los polos de lazo cerrado, tienen un arranque vicioso o de pendiente negativa en su respuesta temporal.
29. Dado un sistema, el error de estado estacionario es siempre el mismo,
independientemente de las perturbaciones a las que esté sometido. 30. Las especificaciones usadas para el diseño tiempo-frecuencia de
sistemas de control analógicos autónomos, relacionados con la exactitud del mismo, son las constantes kp, kv, ka.
31. Si se agregan integradores puros a la función de transferencia de lazo abierto del sistema, esto mejora la exactitud y la estabilidad del mismo.
32. En un sistema de control a mayor exactitud, mayor estabilidad. 33. La acción de un controlador PI contribuye con un polo en el origen y un
cero en (-1/Ti). 34. Con un control de tipo PD se incluye un cero de lazo cerrado en (-1/Td). 35. El controlador PD es esencialmente un tipo de controlador anticipativo,
que además tiene como características principales la de reducir el máximo sobreimpulso y de aumentar el amortiguamiento de la respuesta del sistema.
36. El controlador P hace que la respuesta de un sistema tenga menos
sobreimpulso que si fuese un PD. 37. El agregado de un controlador PI a un sistema incrementa en dos el
orden del sistema. 38. El controlador PI, en general, disminuye el amortiguamiento del sistema y
además empeora (aumenta) el error de estado estacionario. 39. El controlador PID aumenta el error de estado estacionario de un
sistema. 40. El controlador PID reduce el tiempo de subida y reduce también el
Unidad 3 Practico5 12
tiempo de establecimiento del sistema al que se aplica. 5.2)- EJERCICIOS 1)- Investigar y Justificar la condición de estabilidad de los siguientes sistemas:
1)()3.(
)6.(15)()
1)()2).(7(
5)()
2.1)(145
2.12
3250
)()
2942
)6.(4
)(
)()
1015035
2.8
3)5).(1.(10
)(
)()
=+
−=−
=++
=−
−==++
=−
++
+=−
−=−−+
++=−
SHconSS
SSGe
SHconSS
SGd
SenraízunadatocomodáSesHconSSS
SGc
SS
S
SR
SCb
SenraizunadatocomodaseSSS
SS
SR
SCa
f) - 5225.75.11
)10()()(
23 −=+++
+= Senraizunadatocomodase
SSSS
SRSC
2)- Dados los siguientes Sistemas, obtener la respuesta Temporal C(t), aplicando Transformada de Laplace. Identificar cada parte de la respuesta, y explicar de quién depende cada término de la respuesta encontrada. Teniendo en cuenta la configuración de ceros y polos del sistema graficar la respuesta temporal aproximada para cada una de las funciones anteriores.
1 R(t) Con
SS)S(
)S(R)S(C)a =
+++
=−23
82
1 R(t) Con
)S).(S).(S()S.(
)S(R)S(C)b =
++++
=−863
1144
Unidad 3 Practico5 13
En el ejercicio 2 b)Advertir el efecto en la forma final de la Respuesta que causa el cero a la derecha del polo. Por ser todos los polos reales, correspondería una respuesta sobreamortiguada, pero lo que ocurre realmente es que el cero dominante ubicado a la derecha de los polos, causa un efecto derivativo y genera un exceso de alcance por encima del valor final produciendo una respuesta subamortiguada pero sin oscilaciones porque no hay parte imaginaria.
Observar que la presencia de un cero muy cerca del valor de un polo origina un residuo de dicho polo muy pequeño, el cual para un polo real, se convierte en el coeficiente que acompaña a la exponencial del transitorio generado por el mismo. Como el coeficiente es muy pequeño, el transitorio de este polo es despreciable en amplitud frente a las exponenciales generadas por los otros polos. De esta forma los transitorios de los otros dos polos dominan la respuesta del sistema, aproximándose la respuesta a la de un sistema de segundo orden.
)S).(S.()S()S(R)S(C)e
)S).(SS(
)S.(
)S(R)S(C)d
52420
314422119
3
2
+++=−
+++
+=−
3)- Dada una entrada rampa r(t) = t; calcular la salida temporal del siguiente Sistema. Identificar cada parte de la respuesta, y explicar de quién depende cada término.
)6).(1(
)2(
)(
)(
++
+=
SS
S
SR
SC
4)- Dado un Servomecanismo típico de segundo orden, al cual se le aplica una desviación brusca de entrada: r(t)=25º , cuya Función de Transferencia de Lazo Abierto es la siguiente:
Con R (t) = 3 Con R (t) = 1
1)()5).(4).(05.3(
)3.(6)()() =
++++
=− tRparaSSS
SSRSCc

Unidad 3 Practico5 14
SSSG
7250
)(+
= Con H(S) = 1
a)- Calcular δ , ωn y ωd. b)-Sabiendo además qué es un Sistema tipo uno, calcular el valor del ess para la entrada escalón dada. c)- Teniendo en cuenta el valor del δ encontrado, el valor del error de estado estacionario: graficar en forma aproximada pero con criterio la respuesta temporal del Sistema c(t), para la entrada escalón de 25º. d)- Calcular el Mp o Máximo Sobre impulsos respecto al valor final en grados e)- Calcular el tiempo en qué se produce el máximo sobreimpulso tp. f)- Calcular el tiempo de establecimiento al criterio del 2% (usar la fórmula adecuada según el valor del δ). g)- Calcular el valor del error de velocidad de estado estacionario ante una entrada rampa r(t) = 2t ¿Cómo interpreta físicamente el valor del error de velocidad?
5)- Dados los siguientes Sistemas con realimentación unitaria H(S)= 1 y entrada rampa r (t) = 5.t , se pide para cada Sistema:
SSSSGBSistema
SSSSGASistema
+−=
++=
23
23
39)()
94
10)()
a)- Indicar tipo y orden .Justificar la Respuesta. b)- Averiguar la Condición de Estabilidad del Sistema A) para una raíz ubicada en S=-2 y del sistema B) si la misma está ubicada en S=-3 c)- Si son estables; calcular el coeficiente estático de error de velocidad, y el error de velocidad. Interpretar el significado físico del error de velocidad. 6)- Dado el Siguiente Sistema:
)1172
.()(
++=
SSS
KSG
Con H(S)=1 y para una entrada r(t)= t (rampa unitaria):

Unidad 3 Practico5 15
a)- Indicar tipo y orden del Sistema. Justificar la respuesta. b)- Encontrar los valores del parámetro K que satisfaga la condición de tener un error de estado estacionario menor o igual a 0,35 (ess ≤ 35 %). c) Interpretar físicamente el valor de error de velocidad pedido. 7)- Dada la siguiente F.T.L.A de un sistema realimentado negativamente por un lazo unitario:
)25.01).(5.01(
20)(
SSSG
++= H(S)= 1 Con r(t) = 1
a)- Encontrar el valor del coeficiente de amortiguamiento δ, la frecuencia natural de oscilación sin amortiguamiento wn, y la frecuencia con amortiguamiento del sistema wd. Interpretar el concepto físico de δ, wn, y wd. b)- Encontrar el valor del Máximo Sobreimpulso, el tiempo de máximo sobreimpulso, y los mínimos y máximos secundarios de la respuesta transitoria del sistema dado (Recordar: n impar =máximos secundarios; n pares = mínimos secundarios) 8)- Marcar en el plano S la zona de ubicación de un par de polos complejos conjugados, que cumplan con las siguientes especificaciones de diseño. a)- 0,707≤ δ ≤ 0.866 y wn ≤ 3,5 rad/seg b)- δ ≤ 0.40 y 1 rad/seg ≤ wn ≤ 4,5 rad/seg c)- δ ≥ 0.707 y wn ≥ 2 rad/seg d)- Mp ≤ 4,32 % con un tp ≤ 1,26 seg. 9)-Para el sistema de control que se muestra en la figura sometido a una entrada escalón unitaria (r(t)=1), encuentre los valores de K y Kt para que el sobrepaso máximo de la salida sea aproximadamente 4.3% y el tiempo de retardo td sea aproximadamente 0.1s. Utilice la siguiente ecuación para el td.
Wntd
2469.0125.01.1 δδ ++=
Unidad 3 Practico5 16
K 100(0,2S+1)
120 S
Kt
R(S) C(S)
- -
E(S)
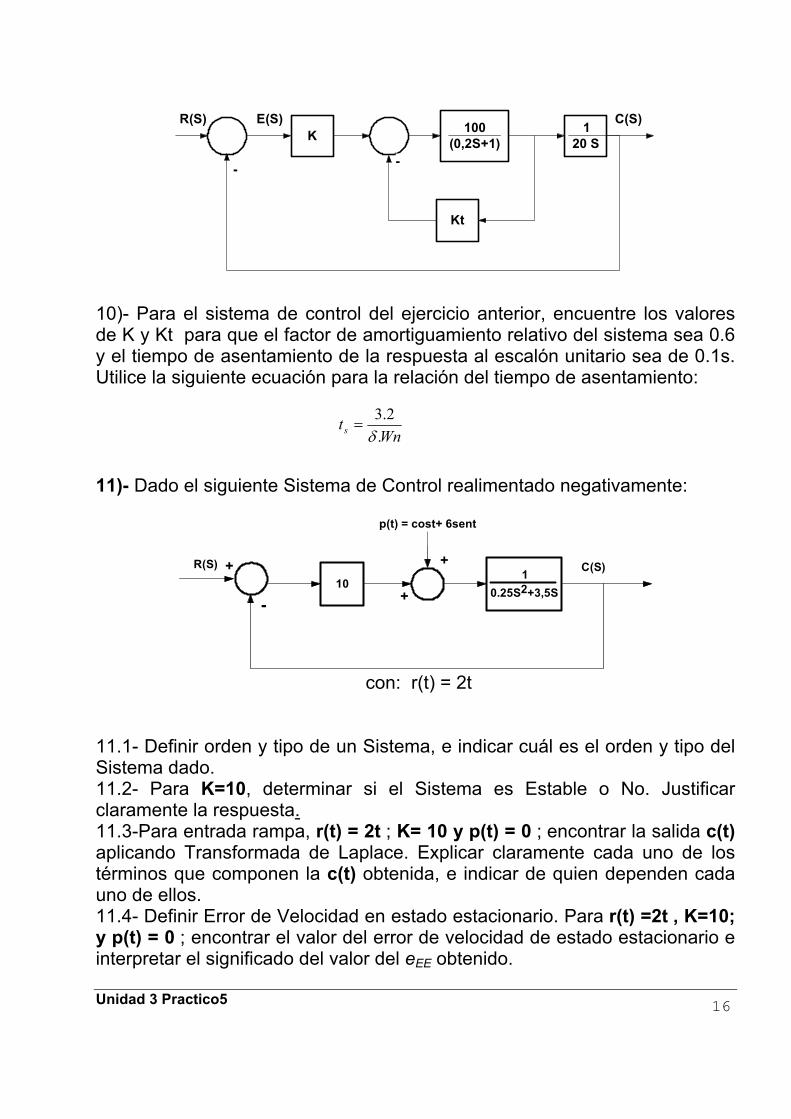
10)- Para el sistema de control del ejercicio anterior, encuentre los valores de K y Kt para que el factor de amortiguamiento relativo del sistema sea 0.6 y el tiempo de asentamiento de la respuesta al escalón unitario sea de 0.1s. Utilice la siguiente ecuación para la relación del tiempo de asentamiento:
11)- Dado el siguiente Sistema de Control realimentado negativamente:
101
0.25S2+3,5S
p(t) = cost+ 6sent
R(S) C(S)
- +
++
con: r(t) = 2t 11.1- Definir orden y tipo de un Sistema, e indicar cuál es el orden y tipo del Sistema dado. 11.2- Para K=10, determinar si el Sistema es Estable o No. Justificar claramente la respuesta. 11.3-Para entrada rampa, r(t) = 2t ; K= 10 y p(t) = 0 ; encontrar la salida c(t) aplicando Transformada de Laplace. Explicar claramente cada uno de los términos que componen la c(t) obtenida, e indicar de quien dependen cada uno de ellos. 11.4- Definir Error de Velocidad en estado estacionario. Para r(t) =2t , K=10; y p(t) = 0 ; encontrar el valor del error de velocidad de estado estacionario e interpretar el significado del valor del eEE obtenido.
Wnts .
2.3δ
=

Unidad 3 Practico5 17
11.5- De acuerdo a la forma de entrada, a la expresión de la Salida obtenida en el punto 9.3 y al valor del error de estado estacionario obtenido en 9.4 ; graficar la Respuesta Temporal c(t) en forma aproximada, pero con criterio. 11.6- Para una entrada escalón unitaria (r(t) =1) con k=10 y p(t) = 0, calcular el valor de la salida en estado estacionario del Sistema dado aplicando el Teorema del Valor Final. Calcular también δ y wn. Graficar con criterio de acuerdo a los valores encontrados, la respuesta temporal del Sistema a la entrada escalón unitaria. Indicar el nombre de la Respuesta obtenida. 11.7- Si a la Función de Transferencia de Lazo Cerrado del Sistema dado, se le agrega un cero ubicado en S=-1, indicar que efectos se obtienen sobre la respuesta temporal del Sistema. Ubicar los polos y el cero en el plano S y graficar la salida que se obtendría en forma aproximada. 11.8- Para una entrada r(t)=5t; encontrar el valor de K que hace que el error de estado estacionario, sea menor que 0,1. 12)- Dada la siguiente F.T.L.C, que corresponde a un sistema de fase no mínima, para una entrada r(t) = 1, encontrar la respuesta temporal del Sistema usando Transformada de Laplace. Indicar que representa cada uno de los términos obtenidos. Graficar en forma aproximada la respuesta del sistema según la configuración de polos y ceros del sistema.
)4S).(5S.2S()2S.(20
)S(R)S(C
2 +++
−−=
13)- Dada la siguiente respuesta temporal de un sistema típico de segundo orden:
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.5 7 7.5 8 8.5 9
00.10.20.30.40.50.60.70.80.9
11.11.21.31.41.51.61.71.8
Out
put y
(t)
Time, s
R(t) = 1
valor de estado estacionario
C(t)
Respuesta temporal de un Sistema típico de segundo orden
Unidad 3 Practico5 18
13.1- Indicar en la gráfica el Mp, tMP, test, tr, td, eEE. 13.2- Con ayuda de la gráfica, encontrar el valor del tp, del Mp respecto al valor de estado estacionario y determinar el valor de δ, wn ,wd. Recordar que para calcular el Mp se debe utilizar:
)(C)(C)tp(CMp
∞∞−
=
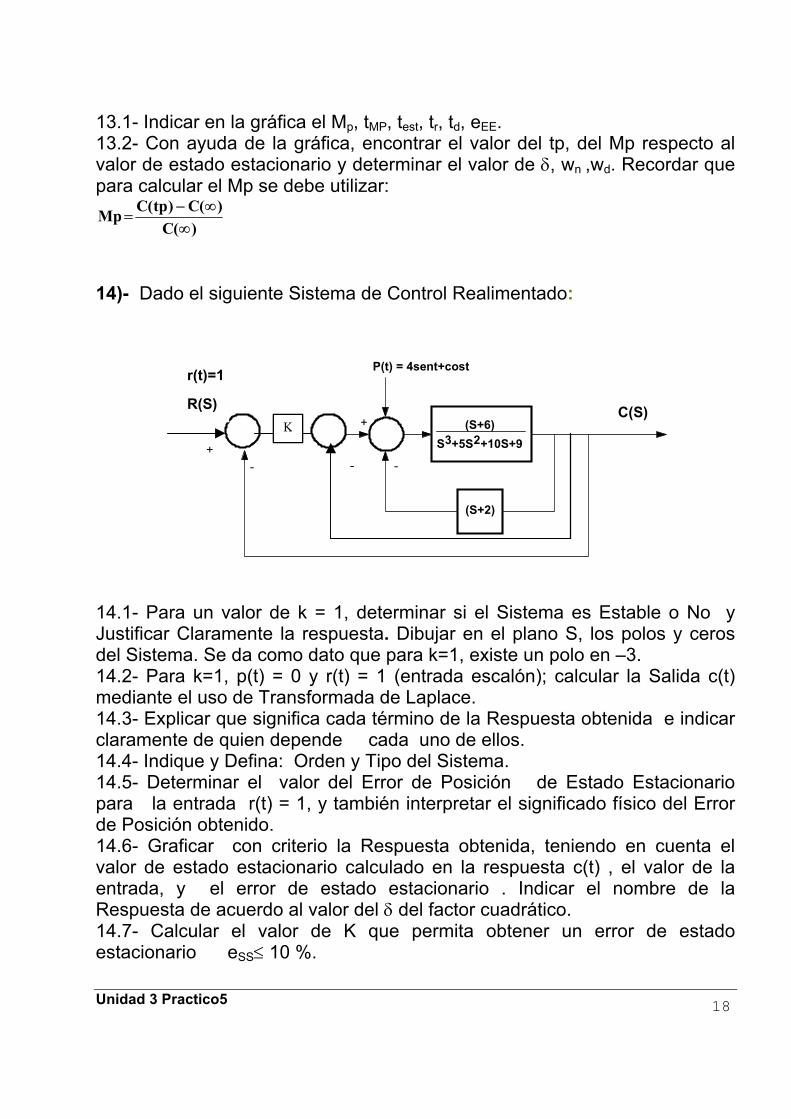
14)- Dado el siguiente Sistema de Control Realimentado:
KC(S)
+- -
+
P(t) = 4sent+costr(t)=1
(S+6)S3+5S2+10S+9
(S+2)
R(S)K
-
14.1- Para un valor de k = 1, determinar si el Sistema es Estable o No y Justificar Claramente la respuesta. Dibujar en el plano S, los polos y ceros del Sistema. Se da como dato que para k=1, existe un polo en –3. 14.2- Para k=1, p(t) = 0 y r(t) = 1 (entrada escalón); calcular la Salida c(t) mediante el uso de Transformada de Laplace. 14.3- Explicar que significa cada término de la Respuesta obtenida e indicar claramente de quien depende cada uno de ellos. 14.4- Indique y Defina: Orden y Tipo del Sistema. 14.5- Determinar el valor del Error de Posición de Estado Estacionario para la entrada r(t) = 1, y también interpretar el significado físico del Error de Posición obtenido. 14.6- Graficar con criterio la Respuesta obtenida, teniendo en cuenta el valor de estado estacionario calculado en la respuesta c(t) , el valor de la entrada, y el error de estado estacionario . Indicar el nombre de la Respuesta de acuerdo al valor del δ del factor cuadrático. 14.7- Calcular el valor de K que permita obtener un error de estado estacionario eSS≤ 10 %.

Unidad 3 Practico5 19
15)- Diseñar la Función de Transferencia de un Sistema Típico de Segundo Orden que para una entrada escalón, r(t) = 1 cumpla las siguientes especificaciones de diseño:
- Mp ∠ 25% Máximo sobreimpulso - ess = 0 Error de estado estacionario - tp ∠ 1,26 seg Tiempo de Máximo Sobreimpulso.
16)- Dado el siguiente sistema de control realimentado negativamente:
1(1+2.S)
2(1+0.5S)
p(t) = cost+ 3.sent
R(S) C(S)
- +
++
16.1- Determinar si la respuesta del sistema es estable o no. Justificar la respuesta. 16.2- Para una entrada Rampa r(t) = t y p(t) = 0, encontrar la salida c(t), aplicando Transformada de Laplace. 16.3- Para p(t) = 0, y r(t)=0, encontrar el valor del error de velocidad obtenido (eEE) e interpretar su significado. 16.4 – Graficar con criterio, pero en forma aproximada la respuesta del sistema para la entrada rampa, de acuerdo a lo obtenido en 14.2 16.5- Para una entrada escalón unitaria, r(t) = 1 , calcular el valor de estado estacionario, aplicando el Teorema del Valor Final. Calcular δ y wn. Graficar la respuesta del sistema con criterio, de acuerdo al valor del δ obtenido y al valor de estado estacionario. Indicar el nombre de la respuesta. 17)- Dada la siguiente Función de Transferencia:
1003S2+25.S+100
C(S) R(S) =
17.1- Para una entrada escalón de r(t)= 25º, calcular los valores de δ y wn. 17.2- Calcular el Máximo sobreimpulso en grados (Mp) , el tiempo en que se

Unidad 3 Practico5 20
produce dicho máximo (tp), el valor máximo de la respuesta (C(t)max), y la diferencia entre el valor máximo de la respuesta C(t)max y el valor de estado estacionario C(∞). 17.3- Graficar la respuesta teniendo en cuenta el valor del δ, y el C(t)max .
2(1 )max( ) ( )
( )C t C t
p C tM eπδ
δ−∞
∞
−−= =
18)- Dada la siguiente F.T en el dominio de Laplace en forma genérica, en función de δ y ωn para (0<δ<1), con un par de polos complejos jugados en λ1,2= -δωn ± ωd.
22
2
..2)()()(.
nn
n
SSRSCSTF
ωωδω
++== con 21 δωω −= nd
Realizar la expansión en fracciones parciales, encontrar el valor de los residuos y coeficientes correspondientes y aplicar antitransformada de Laplace hasta llegar a la siguiente expresión de la respuesta temporal:
)1.(.1
1..1
.cos1)(2
1
2
..
2
....
δδω
δω
δ
δωωδ
ωδωδ −+
−−=
−+−= −
−−− tgtsenetsenetetC d
t
dt
dt
nnn
19)- Determinar mediante el criterio de Routh si las siguientes ecuaciones características representan un sistema estable. Si el sistema no es estable justificar cuántas raíces posee el mismo en el semiplano derecho. a) 012*8
2*4
3=+++ sss
b) 012*42
*43
*2 =+++ sss c) 08*12
2*6
3=+++ sss
20)- Determinar por el método de Routh qué restricciones se deben colocar al parámetro K para asegurar que el sistema sea estable. a) 0*6
2*11
3*6
4=++++ kssss
b) )2(*
2)20(*)10(*
)(*)(+
++=
ss
ssksHsG

Unidad 3 Practico5 21
c) )5*2
2(*)5(*
)*2.1(*20)(*)(
+++
+=
ssss
sksHsG
21)- Dada la siguiente ecuación característica de un sistema, determinar por el método de Routh, utilizando como herramienta el comando srouth de Matlab, que restricciones se deben colocar a los parámetros a y k para que el sistema sea estable.
04*)2(2*)2(3
)2(*)(*
)4(*)(*)( =+++++=⇒
++
+= kskasasticacaracterísecuación
sass
sksHsG
22)- Dado el siguiente sistema de control:
Donde: 2)(1 == hKsG ; plantaGrcontroladoGsG *)( = ; srcontroladoG2
4 += ;
121
−=
splantaG y )2()( += ssH
a)- Determinar el error de estado estacionario de sistema, cuando la señal de referencia es una rampa de pendiente unitaria: )()( ttutSr = , usando el sistema equivalente con realimentación unitaria. b) Determinar el error de estado estacionario de sistema, cuando la señal de referencia es una rampa de pendiente unitaria: )()( ttutSr = , usando los coeficientes de la función de transferencia del sistema. 23)- Dado el siguiente sistema de control:

Unidad 3 Practico5 22
Donde: 6)(1 == hKsG ; plantaGrcontroladoGsG *)( = ; srcontroladoG6
6 += ;
)14*132
*63
(
2
+++
=
sssplantaG y )6()( += ssH
a)- Determinar el error de estado estacionario de sistema, cuando la señal de referencia es una rampa de pendiente unitaria: )()( ttutSr = , usando el sistema equivalente con realimentación unitaria. b) Determinar el error de estado estacionario de sistema, cuando la señal de referencia es una rampa de pendiente unitaria: )()( ttutSr = , usando los coeficientes de la función de transferencia del sistema. 24) - Un sistema de control con un controlador PD se muestra en la siguiente figura:
Encontrar los valores de Kp y Kd tal que la constante de error rampa Kv sea 1000 y el factor de amortiguamiento relativo sea 0.5. 25)- La función de transferencia de lazo abierto de de un sistema de control es la siguiente:
2.361
4500)( 2
+=
sspG
Diseñe un controlador PD Modificado tal que las siguientes especificaciones sean satisfechas:

Unidad 3 Practico5 23
• Error de estado estacionario debido a una entrada escalón unitaria menor o igual a 0.001 (ess≤0.001) • Sobrepaso máximo ≤ 5% 26)- Dado el siguiente sistema:
1)(;10*1.0
10)( =
+= sH
sspG
a)-Elegir un controlador, cuya estructura sea la mínima posible, que permita que el sistema se comporte como un seguidor perfecto ante una entrada escalón, y a la vez permita mejorar el transitorio del sistema. Justificar claramente su elección. b)-Realizar los diagramas de bloque correspondientes al sistema original y al sistema controlado. c)-Obtener la F.T. de Lazo cerrado y de Lazo Abierto del sistema controlado. d)-Indicar tipo y orden del sistema sin controlar, y del sistema controlado. e)-Explicar el efecto que tiene la variación de las constantes del controlador elegido sobre el estado transitorio y el estado estacionario (ess) del sistema.
27)- Dado el siguiente sistema: 1)(;4
220
)( =−
= sHs
spG
a)-Averiguar la condición de estabilidad del sistema. b)-Elegir un controlador, cuya estructura sea la mínima posible, que permita estabilizar el sistema, que también se pueda disminuir el error de estado estacionario ante una entrada escalón unitaria y que se pueda evitar el efecto de la derivación del escalón de entrada. Justificar claramente su elección. c)-Realizar los diagramas de bloque correspondientes al sistema original y al sistema controlado. d)-Obtener la F.T. de Lazo cerrado y de Lazo Abierto del sistema controlado. e)- Indicar tipo y orden del sistema sin controlar, y del sistema controlado. f)- Encontrar la KLA ganancia de lazo abierto del sistema, el valor de ωn
y de δ del sistema controlado. Explique el efecto que tiene la variación de las constantes del controlador elegido sobre el estado transitorio y el estado estacionario (ess) del sistema.
28) Para una planta )42(
1)(
sSSG
+= , y H(S) = 1 suponer que ingresa
simultáneamente a la entrada de referencia escalón unitaria R(t)=1, una perturbación P(t) a la planta G(S). Teniendo en cuenta eso se pide:
Unidad 3 Practico5 24
28.1- Elegir y Justificar la elección de un controlador de estructura mínima que permita cumplir las siguientes especificaciones de diseño. Importante: Realizar la justificación haciendo referencia a las características del controlador. a)- Convertir el sistema en un perfecto seguidor a la entrada de referencia. b)- Tener la posibilidad de mejorar la respuesta transitoria, permitiendo así aumentar la estabilidad relativa del sistema. c)- Trasformar el sistema en un perfecto regulador ante la entrada de perturbación. 28.2- Armar el diagrama de bloque del sistema controlado completo. Para P(t) = 0, encontrar la F.T.L.A y F.T.L.C del sistema controlado e indicar tipo y orden. 28.3- Para la constante proporcional Kp=1, encontrar mediante el criterio de Routh-Hurwitz el rango de variación del otro parámetro del controlador escogido, para que el sistema siga teniendo un comportamiento estable. Autocorrección de la PARTE 5.1) ACTIVIDAD DE AUTOEVALUACIÓN 1. si 11. no 21. no 31. no 2. si 12. si 22. si 32. no 3. no 13. si 23. no 33. si 4. si 14. no 24. no 34. no 5. si 15. si 25. no 35. si 6. si 16. si 26. si 36. no 7. no 17. si 27. no 37. no 8. si 18. si 28. si 38. no 9. si 19. si 29. no 39. no 10. no 20. no 30. si 40. si