using cramer- rao -lower-bound to reduce complexity of localization in wireless sensor networks
DESCRIPTION
Using Cramer- Rao -Lower-Bound to Reduce Complexity of Localization in Wireless Sensor Networks. Dominik Lieckfeldt, Dirk Timmermann Department of Computer Science and Electrical Engineering Institute of Applied Microelectronics and Computer Engineering University of Rostock - PowerPoint PPT PresentationTRANSCRIPT

Using Cramer-Rao-Lower-Bound to Reduce Complexity
of Localization in Wireless Sensor Networks
Dominik Lieckfeldt, Dirk Timmermann
Department of Computer Science and Electrical EngineeringInstitute of Applied Microelectronics and Computer Engineering
University of Rostock

Outline
1. Introduction
2. Goal
3. Localization in wireless sensor networks Overview Cramer-Rao-Lower-Bound Complexity and energy consumption
4. Characterizing Potential Benefits
5. Conclusions / Outlook
6. Literature
Using CRLB to Reduce Complexity of Localization in WSNs 2

Introduction
• Wireless Sensor Network (WSN): Random deployment of large
number of tiny devices Communication via radio
frequencies Sense parameters of
environment
• Applications Forest fire Volcanic activity Precision farming Flood protection
Using CRLB to Reduce Complexity of Localization in WSNs 3
• Location of sensed information important parameter in WSNs

Introduction – Localization Example
4Using CRLB to Reduce Complexity of Localization in WSNs
Parameters: m … Number of beacons n … Number of
unknowns N=m+n … Total number
of nodes
Beacon
Unknown
Error ellipse

Goal of this Work
• Investigate potential impact and applicability of adapting and scaling localization accuracy to: Activity Importance Energy level Other parameters (context)
• Obey fundamental trade-off between:accuracy <-> complexity
• Benefits: Decreased communication Prolonged lifetime of WSN
Using CRLB to Reduce Complexity of Localization in WSNs 5

Localization in WSN
• Possible approaches Lateration (typically used) Angulation Proximity
• Lateration Use received signal strength
(RSS) to estimate distances : RSS ~ 1/d²
Idea: – Estimate distances to beacons– Solve non-linear system of
equations
Using CRLB to Reduce Complexity of Localization in WSNs 6
24,1
241
241
23,1
231
231
22,1
221
221
)()(
)()(
)()(
dyyxx
dyyxx
dyyxx
23
4
12,1d
3,1d
4,1d
i,jd

Localization in WSN
• Measurements of RSS are disturbed: Interference Noise
• How accurate can estimates of position be? Cramer-Rao-Lower-Bound (CRLB) poses lower bound on
variance of any unbiased estimator
Using CRLB to Reduce Complexity of Localization in WSNs 7
22
1
2 1
2
2,1
2,1
,,1
2
2,1
rss )~()~(E1
yyxx
dd
dd
d
bCRLB
N
i
N
ij ji
jiji
N
ij
… Path loss coefficient… standard deviation of
RSS measurements… true parameter… estimated parameter
pn
rss
Distance
Geometry
2
rss
p
10ln
10
n
b
x
x~
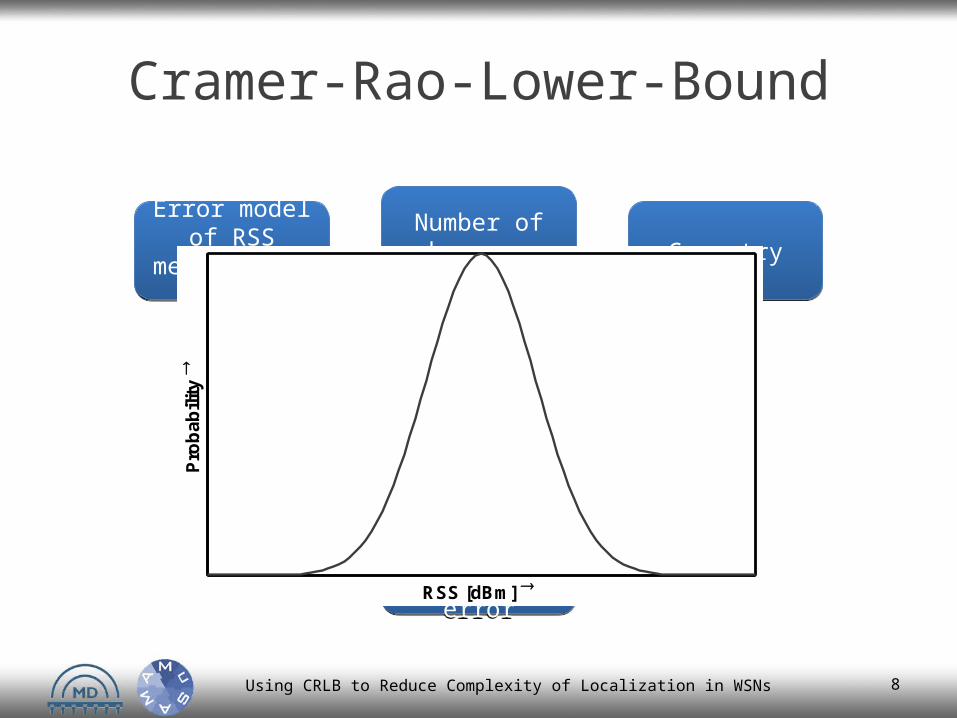
Cramer-Rao-Lower-Bound
Using CRLB to Reduce Complexity of Localization in WSNs 8
CRLBCRLB
Error model of RSS
measurements
Error model of RSS
measurements
Number of beacons
Number of beacons GeometryGeometry
Lower bound on variance of
position error
Lower bound on variance of
position errorRSS [dBm]
Pro
ba
bili
ty

-5 0 2.5-2.5 5 x
Cramer-Rao-Lower-Bound
-5 0 2.5-2.5 5 x
-5 0 2.5-2.5 5
0
0.2
0.4
x
Pro
bab
ilit
y
• Example 1 dimension True position at x=0 Disturbed position estimates Probability density of position estimates Standard deviation or root mean square error
more intuitive than variance
Using CRLB to Reduce Complexity of Localization in WSNs 9
22rss )ˆ()ˆ(E yyxxCRLB
2

Cramer-Rao-Lower-Bound – An Example
• 2 beacons, 1 unknown
Using CRLB to Reduce Complexity of Localization in WSNs 10
0 0.1 0.2 0.3 0.40
50
100
150
200
250
300
Distance/ [rad]
Inc
rea
se
of
rss [
%]
0 0.1 0.2 0.3 0.40
50
100
150
200
250
300
Distance/ [rad]
Inc
rea
se
of
rss [
%]
4/

Complexity of Localization
• Complexity depends on: Dimensionality (2D/3D) Number of Beacons Number of nodes with unknown
position
Using CRLB to Reduce Complexity of Localization in WSNs 11

Energy Consumption and Localization
• Communication Two-way communication beacon <->
unknown Main contribution to total energy
consumption
• Calculation Simplest case: Energy spend ~ number
of beacons
Using CRLB to Reduce Complexity of Localization in WSNs 12
Ene
rgy
Number of beacons

Reducing Complexity of Localization in WSNs
• How to reduce Complexity? Constrain number of beacons used Idea:
Select those beacons first that contribute most to localization
accuracy!
Using CRLB to Reduce Complexity of Localization in WSNs 13

Related Work
• Impact of geometry not considered
• No local rule which prevents insignificant beacons from broadcasting their position
Using CRLB to Reduce Complexity of Localization in WSNs 14
Beacon Placement
Beacon Placement
Weighting range measurements
Weighting range measurements
Simulate localization error
Simulate localization error
Variance/Distance[LZZ06, CPI06, BRT06]Variance/Distance[LZZ06, CPI06, BRT06]
Detect outliers[OLT04, PCB00]Detect outliers[OLT04, PCB00]
Choose nearest k beacons[CTL05]
Choose nearest k beacons[CTL05]
Characterizing Potential Benefits
• Simulations using Matlab
• Aim: Proof of Concept Determine how likely it is that
constraining the number of beacons is possible without increasing CRLB significantly
Using CRLB to Reduce Complexity of Localization in WSNs 15

Characterizing Potential Benefits
• Simulation setup: Random deployment of m beacons and 1
unknown
Using CRLB to Reduce Complexity of Localization in WSNs 16
For every deployment calculate:– – k=m: consider all beacons– k<m: consider all combinations
of subsets of beacons determine ratio
mkk
miki ,,1;,,1)()(
k
m
1)(/)()( )()()( mkk iii

5 7 9 11 133
10
20
30
40
50
60
70
80
90
100
k
P(C
RL
Bo
k ) [
%]
5 7 9 11 133
10
20
30
40
50
60
70
80
90
100
k
P(C
RL
Bo
k ) [
%]
optimalrandom
Characterizing Potential Benefits
Using CRLB to Reduce Complexity of Localization in WSNs 17
• Potential of approach m=13 beacons Event: “CRLBok“ (equals 5% increase)05,0)()( ki
Potentially highest savingsin terms of energy and communication effort

Conclusion / Outlook
• Preliminary study based on CRLB Considers strong impact of geometry on
localization accuracy
• Selection of subsets of beacons for localization is feasible in terms of: Prolonging lifetime of sensor network Decreasing communication
• Outlook Determine/investigate local rules for
selecting subset of beacons
Using CRLB to Reduce Complexity of Localization in WSNs 18

Literature
[BHE01] Nirupama Bulusu, John Heidemann, and Deborah Estrin. Adaptive beacon placement. In ICDCS '01: Proceedings of the The 21st International Conference on Distributed Computing Systems, pages 489–503, Washington, DC, USA, 2001. IEEE Computer Society.
[BRT06] Jan Blumenthal, Frank Reichenbach, and Dirk Timmermann. Minimal transmission power vs. signal strength as distance estimation for localization in wireless sensor networks. In 3rd IEEE International Workshop on Wireless Ad-hoc and Sensor Networks, pages 761–766, Juni 2006. New York, USA.
[CPI06] Jose A. Costa, Neal Patwari, and Alfred O. Hero III. Distributed weighted-multidimensional scaling for node localization in sensor networks. ACM Transactions on Sensor Networks, 2(1):39–64, February 2006.
[CTL05] King-Yip Cheng, Vincent Tam, and King-Shan Lui. Improving aps with anchor selection in anisotropic sensor networks. Joint International Conference on Autonomic and Autonomous Systems and International Conference on Networking and Services, page 49, 2005.
[LZZ06] Juan Liu, Ying Zhang, and Feng Zhao. Robust distributed node localization with error management. In MobiHoc '06: Proceedings of the seventh ACM international symposium on Mobile ad hoc networking and computing, pages 250–261, New York, NY, USA, 2006. ACM Press.
[OLT04] E. Olson, J. J. Leonard, and S. Teller. Robust range-only beacon localization. In Proceedings of Autonomous Underwater Vehicles, 2004.
[PCB00] Nissanka B. Priyantha, Anit Chakraborty, and Hari Balakrishnan. The cricket location-support system. In 6th ACM International Conference on Mobile Computing and Networking (ACM MOBICOM), 2000.
[PIP+03] N. Patwari, A. III, M. Perkins, N. Correal, and R. O'Dea. Relative location estimation in wireless sensor networks. In IEEE TRANSACTIONS ON SIGNAL PROCESSING, volume 51, pages 2137–2148, August 2003.
[SHS01] Andreas Savvides, Chih-Chieh Han, and Mani B. Strivastava. Dynamic fine-grained localization in ad-hoc networks of sensors. Pages 166–179, 2001.
Using CRLB to Reduce Complexity of Localization in WSNs 19

Questions?
Thank you for your Attention!
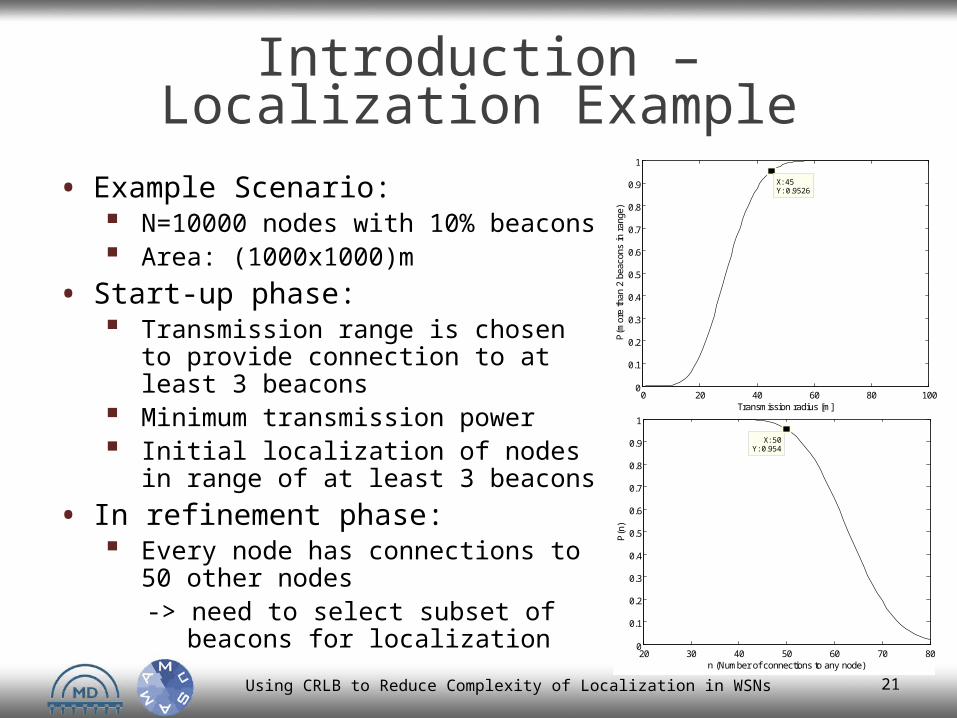
Introduction – Localization Example
Using CRLB to Reduce Complexity of Localization in WSNs 21
20 30 40 50 60 70 800
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
X: 50Y: 0.954
n (Number of connections to any node)
P(n
)
• Example Scenario: N=10000 nodes with 10% beacons Area: (1000x1000)m
• Start-up phase: Transmission range is chosen to provide
connection to at least 3 beacons Minimum transmission power Initial localization of nodes in range of at
least 3 beacons
• In refinement phase: Every node has connections to 50 other
nodes -> need to select subset of beacons for
localization
0 20 40 60 80 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Transmission radius [m]
P(m
ore
than
2 b
eaco
ns in
ran
ge)
X: 45Y: 0.9526