viscoélasticité pour le calcul des structures · sique sur lequel on construit, comme dans le cas...
TRANSCRIPT
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Viscoélasticité pour le
Calcul des structures
Jean Salençon
les presses desponts et chaussées
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Ce logo a pour objet d’alerter le lecteur sur la menace que représente pour l’avenir de l’écrit, tout particulièrement dans le domaine univer-sitaire, le développement massif du « photocopillage ».Cette pratique qui s’est généralisée, notamment dans les établissements d’enseignement, provoque une baisse brutale des achats de livres, au point que la possibilité même pour les auteurs de créer des œuvres nouvelles et de les faire éditer correctement est aujourd’hui menacée. Nous rappelons donc que la production et la vente sans autorisation, ainsi que le recel, sont passibles de poursuites.Les demandes d’autorisation de photocopier doivent être adressées à l’éditeur ou au Centre français d’exploitation du droit de copie : 20, rue des Grands-Augustins , 75006 Paris. Tél. : 01 44 07 47 70.
© Éditions de l’École polytechnique - Mai 201691128 Palaiseau Cedex
Du même auteur
Théorie de la plasticité pour les applications à la mécanique des sols © Eyrolles - 1974 - 178 pages
Application of the theory of plasticity in soil mechanics© John Wiley and Sons Ltd - 1977 - 158 pages - ISBN 0-47174984-2
Viscoélasticité - © Presses de l’École nationale des ponts et chaussées983 - 92 pages - ISBN 2-85978-051-3
Calcul à la rupture et analyse limite - © Presses de l’École nationale des ponts et chaussées1983 - 366 pages - ISBN 2-85978-059-9
Élastoplasticité - (B. Halphen et J. Salençon)© Presses de l’École nationale des ponts et chaussées - 1987 - 448 pages - ISBN 2-85978-094-7
Mécanique des milieux continus - © Ellipses - 1988Tome 1 - Concepts généraux - 270 pages - ISBN 2-7298-8854-3Tome 2 - Élasticité - Milieux curvilignes - 316 pages - ISBN 2-7298-8863-2
Mécanique du continu - © Ellipses - 1995Tome 1 - Concepts généraux - 352 pages - ISBN 2-7298-4551-8Tome 2 - Thermoélasticité - 286 pages - ISBN 2-7298-4565-8Tome 3 - Milieux curvilignes - 192 pages - ISBN 2-7298-5527-0 Mécanique des milieux continus © Éditions de l’École polytechniqueTome 1 - Concepts généraux - 2005 - 360 pages - ISBN 978-2-7302-1245-8 Tome 2 - Thermoélasticité - 2007 - 314 pages - ISBN 978-2-7302-1419-3Tome 3 - Milieux curvilignes - 2016 - 162 pages - ISBN 978-2-7302-1644-9
Handbook of Continuum Mechanics © Springer 2001 - 804 pages - ISBN 3-540-41443-6
de l’Élasto-plasticité au Calcul à la rupture © Éditions de l’École polytechnique2002 - 262 pages - ISBN 978-2-7302-0915-1
Viscoélasticité pour le calcul des structures © Éditions de l’École polytechnique et Presses de l’École nationale des ponts et chaussées 2009 - 158 pages - ISBN 978-2-7302-1557-2
Yield Design © ISTE – Wiley (London, UK; Hoboken, NJ), 2013 - 240 pages - ISBN 978-1-84821-540-5

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Viscoélasticité
pour le calcul des structures
Le dimensionnement d’un ouvrage nécessite de déterminer, dans le cadre prescritpar les règlements, la réponse de celui-ci aux sollicitations statiques et dynamiquesqui lui sont imposées. Ce dimensionnement se réfère à des critères qui portent sur sarésistance et son aptitude à satisfaire aux divers états de service. En ce qui concerne lepremier de ces deux objectifs, la théorie du Calcul à la rupture formalise la démarchehistoriquement la plus ancienne qui ne s’appuie que sur le concept de résistance dumatériau constitutif sans considération de sa déformation. Avec la théorie de l’Élas-ticité, puis la théorie de la Plasticité, le comportement du matériau constitutif étantpris en compte, le calcul des structures permet d’envisager aussi le second critèreen calculant les déformations et déplacements de l’ouvrage sous l’effet des diversessollicitations.
Les deux modèles de comportement évoqués ici peuvent être décrits comme instan-tanés pour signifier que la réponse à une variation de sollicitation imposée à un instantdonné est entièrement acquise à cet instant. Le concept de comportement différé ex-prime le fait que la réponse à une variation de sollicitation imposée à un instantdonné n’est pas intégralement acquise à cet instant : à titre d’exemple explicite, laréponse incrémentale à une variation d’effort se traduit par une variation de défor-mation instantanée qui évolue (croît) ensuite avec le temps. La prise en compte deseffets dus au comportement différé des matériaux fait partie de la pratique couranteen calcul des structures. C’est le cas notamment pour les ouvrages en béton pour les-quels les règlements français et internationaux énoncent des formules permettant dedéfinir le comportement uniaxial de ce matériau et de calculer la réponse de l’ouvrageau cours du temps, en tenant compte notamment de son mode de construction et deson histoire de chargement. La prise en considération de ce type de comportement estégalement souvent nécessaire pour des ouvrages géotechniques tels que les galeries oules cavités de stockage. Pour la représentation du comportement différé des matériauxen calcul des structures on fait, en règle générale et plus ou moins explicitement, appelau modèle viscoélastique : l’objet du présent ouvrage est de présenter ce modèle danscette perspective, avec l’hypothèse usuelle des petites perturbations.
Le livre est organisé en deux chapitres, eux-mêmes articulés en deux parties.
3

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
4
Le premier chapitre se place du point de vue unidimensionnel, c’est-à-dire en consi-dérant que, pour l’élément de matériau constitutif (ce terme étant pris dans un senstrès général, tel que élément de poutre, . . . ), la sollicitation et la réponse sont unidi-mensionnelles.
Dans la première partie, la simplicité du modèle mécanique permet l’introductionphénoménologique des concepts fondamentaux de la viscoélasticité à partir des expé-riences essentielles de retard et de relaxation. La loi de comportement viscoélastiqueapparaît comme une correspondance fonctionnelle entre l’histoire de la sollicitation etl’histoire de la réponse. La linéarité du comportement n’est autre que la linéarité decette correspondance, qui s’exprime par le principe de superposition de Boltzmann, ex-plicité par la formule de Boltzmann et l’opérateur intégral correspondant. L’invariancedes propriétés mécaniques du matériau par rapport au temps, aussi appelée « absencede vieillissement », est une hypothèse supplémentaire introduite de façon distincte dela précédente : elle permet d’expliciter l’opérateur de Boltzmann sous la forme d’uneconvolution de Stieltjes et d’utiliser le calcul opérationnel au moyen de la transforma-tion de Laplace-Carson. Par rapport à la majorité des présentations classiques, pourlesquelles la linéarité englobe les deux hypothèses précédentes, il y a là une origina-lité de l’exposé, qui est essentielle en calcul des structures ; en effet le vieillissementdes matériaux constitutifs doit y être pris en compte (il apparaît dans les formulesréglementaires) et il est même, parfois, mis à profit.
On procède ensuite à l’analyse et à la résolution du problème d’évolution visco-élastique quasi-statique lorsque le matériau constitutif du système concerné obéit àune loi de comportement viscoélastique linéaire. Suivant la même démarche, l’exposémet l’accent sur la linéarité en montrant que, pour de nombreux problèmes pratiques,l’utilisation symbolique de l’opérateur de Boltzmann permet d’obtenir la solution duproblème d’évolution à partir du problème homologue d’élasticité linéarisée. La com-préhension mécanique des phénomènes en cause est essentielle, notamment pour défi-nir clairement l’histoire de la sollicitation. En l’absence de vieillissement, les résultatsprécédents se transposent sous forme algébrique au moyen de la transformation deLaplace-Carson et sont connus sous le nom de théorème de correspondance de Lee etMandel.
La deuxième partie du chapitre présente des exemples simples de mise en œuvredes résultats précédents dans le but non seulement d’en montrer le caractère effectifmais aussi d’illustrer quelques effets du comportement différé du matériau constitutifsur le comportement d’une structure, notamment en présence de précontrainte.
Le deuxième chapitre traite de la viscoélasticité linéaire tridimensionnelle. Le mo-dèle géométrique et mécanique considéré est le milieu continu tridimensionnel clas-sique sur lequel on construit, comme dans le cas unidimensionnel, la loi de comporte-ment à partir des expériences fondamentales de retard et de relaxation. La démarche,essentiellement pratique, est de nouveau phénoménologique ; elle ne fait pas mentiondes restrictions imposées par la thermodynamique (notamment sur les fonctions derelaxation) pour lesquelles on trouvera les références pertinentes dans la bibliographieà la fin de l’ouvrage. L’utilisation symbolique de l’opérateur intégral de Boltzmannpermet, même en cas de vieillissement, l’écriture de la loi de comportement sous une

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
5
forme algébrique semblable à la loi élastique linéaire. Le cas particulier du matériauisotrope apporte les simplifications connues en élasticité linéaire : la loi de comporte-ment viscoélastique linéaire du milieu continu tridimensionnel isotrope s’écrit algébri-quement, avec l’opérateur intégral de Boltzmann, sous la même forme qu’en élasticitélinéaire, au moyen de deux fonctions de relaxation, homologues des coefficients clas-siques.
L’analyse du problème d’évolution quasi-statique dans l’hypothèse des petites per-turbations lorsque le matériau constitutif du système concerné est isotrope, viscoélas-tique linéaire, met l’accent sur la linéarité comme au chapitre précédent. On montreque, pour un système homogène et des problèmes qui ne font intervenir qu’une fonctionde retard ou de relaxation du matériau constitutif, l’utilisation symbolique de l’opéra-teur de Boltzmann permet d’obtenir la solution du problème d’évolution directementà partir du problème homologue d’élasticité linéarisé. La compréhension mécaniquedes phénomènes en cause est essentielle, notamment pour définir clairement l’his-toire de la sollicitation. Hors des conditions précédentes mais dans l’hypothèse de nonvieillissement, on peut écrire les équations du problème sous forme algébrique simpleen transformées de Laplace-Carson et d’en déduire, en transformées, la solution duproblème à partir de la solution du problème d’équilibre élastique linéarisé homologuepar le théorème de correspondance.
La deuxième partie du chapitre présente des exemples de mise en œuvre sur desproblèmes tridimensionnels typiques, sans faire appel à l’hypothèse de non vieillisse-ment : outre l’application directe des règles énoncées, dans le cas d’histoires simplesde sollicitation, on montre que l’utilisation du principe de superposition permet larésolution du problème d’évolution pour une histoire dans laquelle la nature de lasollicitation change au cours du temps.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Sommaire
I Approche unidimensionnelle 9
Comportement viscoélastique linéaire unidimensionnel 191 Évidences expérimentales . . . . . . . . . . . . . . . . . . . . . . . . . 192 Expériences uniaxiales . . . . . . . . . . . . . . . . . . . . . . . . . . . 203 Comportement linéaire . . . . . . . . . . . . . . . . . . . . . . . . . . 274 Viscoélasticité linéaire . . . . . . . . . . . . . . . . . . . . . . . . . . . 285 Modèle linéaire non-vieillissant . . . . . . . . . . . . . . . . . . . . . . 366 Modèles rhéologiques . . . . . . . . . . . . . . . . . . . . . . . . . . . 447 Comportement viscoélastique linéaire unidimensionnel . . . . . . . . . 528 Comportement sous sollicitation harmonique. Module complexe . . . . 569 Problèmes d’évolutions quasi-statiques . . . . . . . . . . . . . . . . . . 60
Exemples de mise en œuvre 6710 Précontrainte élastique et viscoélasticité . . . . . . . . . . . . . . . . . 6711 Étude d’une structure . . . . . . . . . . . . . . . . . . . . . . . . . . . 70Récapitulatif des formules essentielles . . . . . . . . . . . . . . . . . . . . 80
II Viscoélasticité linéaire tridimensionnelle 89
Comportement viscoélastique linéaire unidimensionnel 971 Approches multidimensionnelles . . . . . . . . . . . . . . . . . . . . . 972 Expériences fondamentales . . . . . . . . . . . . . . . . . . . . . . . . 973 Comportement viscoélastique linéaire tridimensionnel . . . . . . . . . 984 Matériau viscoélastique linéaire isotrope . . . . . . . . . . . . . . . . . 1035 Comportement viscoélastique linéaire en l’absence de vieillissement . . 1086 Évolutions viscoélastiques quasi-statiques . . . . . . . . . . . . . . . . 113
Exemples de mise en œuvre 1277 Barre cylindrique homogène . . . . . . . . . . . . . . . . . . . . . . . . 1278 Convergence d’une cavité . . . . . . . . . . . . . . . . . . . . . . . . . 132Récapitulatif des formules essentielles . . . . . . . . . . . . . . . . . . . . 137
Bibliographie 143
Glossaire français-anglais 147
Index alphabétique 149
7

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Chapitre I
Approche unidimensionnelle
Comportement viscoélastique linéaire unidimensionnel
Exemples de mise en œuvre
9

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Chapitre I – Approche unidimensionnelle 11
En bref...
Les expériences uniaxiales d’identification du comportement des maté-riaux montrent que la réponse à une sollicitation instantanée, telle qu’unemise en charge, est en règle générale constituée d’une partie acquise instan-tanément et d’une partie différée. L’expérience de retard et l’expériencede relaxation sont les expériences les plus simples qui mettent en évidenceces propriétés ; elles sont complétées par l’expérience de recouvrance etl’expérience d’effacement, cette dernière étant d’ailleurs retenue commeexpérience cruciale pour la définition de la viscoélasticité (sections 1 et 2).
Lorsque le comportement étudié est linéaire, le « principe » de super-position ou « principe » de Boltzmann implique que ce comportement estcomplètement défini par les fonctions de retard ou par les fonctions de re-laxation déterminées en effectuant les expériences correspondantes à tousles âges du matériau. La réponse à une histoire quelconque de contrainte(resp. déformation) s’obtient au moyen de l’opérateur intégral de Boltz-mann et des fonctions de retard (resp. relaxation). Les fonctions de retardet de relaxation sont inverses les unes des autres du point de vue de cetopérateur (sections 3 et 4).
L’évolution des propriétés mécaniques au cours du temps indépendam-ment des sollicitations mécaniques auxquelles le matériau est soumis portele nom général de vieillissement. Il est souvent possible, au moins sur unepartie significative de la durée de « vie » d’un matériau, de considérer quel’hypothèse de non-vieillissement est valable. Lorsqu’il en est ainsi, les ré-ponses à deux histoires de sollicitations identiques mais translatées dans letemps à l’intérieur du domaine de validité de l’hypothèse sont elles aussiidentiques et subissent la même translation (invariance par translation)(section 5).
Il en résulte en particulier que, dans le cas de la viscoélasticité linéairesans vieillissement, les fonctions de retard sont définies à partir d’uneseule fonction d’une variable f(τ) qui est appelée la fonction de retard.De la même façon, les fonctions de relaxation sont définies à partir de lafonction de relaxation r(τ). L’opérateur intégral de Boltzmann s’identifieà la convolution de Riemann entre l’histoire de contrainte (resp. défor-mation) et la dérivée (au sens des distributions) de la fonction de retard(resp. relaxation). Plutôt que de travailler dans l’algèbre de convolution,

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
12 Chapitre I – Approche unidimensionnelle
on préfère utiliser le calcul symbolique au moyen de la transformation deLaplace-Carson (section 5).
L’analyse uniaxiale fournit le prototype de toute loi de comporte-ment viscoélastique linéaire unidimensionnelle pour un système soumisà une sollicitation définie par un paramètre unique ou pour un élé-ment de structure dont les efforts intérieurs sont unidimensionnels. Àtitre d’exemples, les comportements viscoélastiques linéaires d’une poutredroite en traction-compression ou en flexion s’inscrivent dans le cadre ainsidéfini. Les relations établies peuvent ensuite être utilisées, de la mêmefaçon qu’en Résistance des matériaux, comme lois de comportement uni-dimensionnelles de l’élément de poutre droite ou d’arc de faible courbure(section 7).
L’approche unidimensionnelle du comportement viscoélastique linéairenon-vieillissant s’appuie fréquemment sur l’utilisation de modèles rhéo-logiques constitués d’éléments simples élastiques (ressorts) et visqueux(amortisseurs ou dashpots) ; les modèles ainsi composés permettent demettre en évidence et/ou de reproduire, au moins qualitativement, descomportements physiques unidimensionnels observés (section 6).
Dans un essai harmonique l’histoire de la sollicitation est une fonc-tion sinusoïdale du temps à partir de l’instant où elle est appliquée. Si lecomportement du matériau étudié est viscoélastique linéaire sans vieillis-sement la réponse se met sous la forme de la somme d’un terme transitoirequi tend vers zéro au fur et à mesure du déroulement de l’essai et d’unterme sinusoïdal, de même fréquence que la sollicitation, qui définit lerégime harmonique asymptotique. Ce régime est gouverné par le modulecomplexe qui met en évidence que, quelle que soit la nature – force oudéplacement – de la sollicitation, la force est toujours en avance sur ledéplacement : le déphasage, appelé angle de perte, est lié à la dissipationd’énergie due à l’irréversibilité du comportement (section 8).
Les problèmes quasi-statiques de viscoélasticité linéaire unidimension-nelle sont définis, dans l’hypothèse des petites perturbations, par le sys-tème des équations de champs et des conditions aux limites sur la géo-métrie donnée du système étudié. Dans l’écriture de ces équations, il estessentiel d’identifier de façon précise la nature des données de façon àéviter tout contresens physique sur les phénomènes mis en jeu (retard ourelaxation). La résolution de ces problèmes peut parfois être effectuée di-rectement, à partir de la solution du problème élastique homologue, aumoyen de l’opérateur de Boltzmann. C’est le cas notamment, lorsque lesystème est constitué d’un matériau homogène, pour des évolutions pres-crites par des paramètres de chargement ou des paramètres cinématiques.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Chapitre I – Approche unidimensionnelle 13
Lorsque le comportement viscoélastique linéaire est, de plus, sans vieillis-sement l’utilisation du calcul symbolique ramène toujours le problèmeviscoélastique au problème élastique homologue portant sur les transfor-mées de Laplace-Carson. Il convient ensuite de procéder à l’inversion destransformées de Laplace-Carson pour obtenir les fonctions du temps, so-lutions du problème de viscoélasticité. C’est le Théorème de correspon-dance(section 9).

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
14 Chapitre I – Approche unidimensionnelle
Principales notations
Notation Signification 1ère formule
Yt(t) Fonction de Heaviside (2.1) (2.2)
σ0 Saut dans l’expérience de retard (2.3)
ε Déformation longitudinale (2.4)
J(t0, t ; σ0) Fonction de retard (2.4)
[[ J(t0, t0 ; σ0) ]] Discontinuité de la fonction de retard (2.6)
ε0 Saut dans l’expérience de relaxation (2.7)
R(t0, t ; ε0) Fonction de relaxation (2.8)
Ft
[ t
σ(τ)−∞
]
Fonctionnelle de l’histoire de contrainte (3.1)
Rt
[ t
ε(τ)−∞
]
Fonctionnelle de l’histoire de déformation (3.2)
F ,R Correspondances fonctionnelles inverses (3.3)
J(t0, t) Fonction de retard en viscoélasticité linéaire (4.3)
R(t0, t) Fonction de relaxation en viscoélasticité linéaire (4.6)
δτ Mesure de Dirac à l’abscisse τ (4.17)
ϕ Distribution définie par la fonction ϕ (4.17)
< ϕ,ψ > Produit scalaire de ϕ et ψ (4.28)
(×) Notation de l’opérateur intégral (4.28)
f(τ) Fonction de retard en viscoélasticité (5.11)
linéaire sans vieillissement
r(τ) Fonction de relaxation en viscoélasticité (5.12)
linéaire sans vieillissement
∗ Symbole de la convolution de Riemann (5.18)
Lϕ(p) Transformée de Laplace de ϕ(t) (5.25)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Chapitre I – Approche unidimensionnelle 15
Principales notations
Notation Signification 1ère formule
ϕ∗ Transformée de Carson de ϕ (5.27)
τr Temps caractéristique en relaxation (6.10)
τf Temps caractéristique en retard (6.13)
⊗ Symbole du produit tensoriel (7.1)
Q Notation générique de la variable « force » (7.2)
q Notation générique de la variable géométrique (7.2)
associée à Q dans l’expression du travail de
déformation
J(τ, t) Notation générique de la fonction de retard en (7.2)
viscoélasticité linéaire
R(τ, t) Notation générique de la fonction de relaxation en (7.3)
viscoélasticité linéaire
f(τ) Notation générique de la fonction de retard en (7.4)
viscoélasticité linéaire sans vieillissement
r(τ) Notation générique de la fonction de relaxation en (7.5)
viscoélasticité linéaire sans vieillissement
N Effort normal dans l’élément de poutre droite (7.8)
ε Déformation longitudinale de l’élément de poutre (7.8)
droite
M Moment fléchissant dans l’élément de poutre droite (7.11)
χ Courbure de l’élément de poutre droite (7.11)
C Moment de torsion dans l’élément de poutre droite (7.14)
α Rotation différentielle de l’élément de poutre droite (7.14)
J Moment d’inertie de torsion (7.15)
Re[ ] Partie réelle (8.4)
r∗(iω) Module complexe (8.10)
M(ω) Module de r∗(iω) (8.10)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
16 Chapitre I – Approche unidimensionnelle
Principales notations
Notation Signification 1ère formule
δ(ω) Angle de perte (8.10)
f Coefficient de frottement intérieur (8.20)
Q Vecteur chargement (9.1)
Qj Paramètre de chargement (9.1)
q Vecteur cinématique (9.2)
qj Paramètre cinématique (9.2)
σél
j εél
j ,
ξél
j, qél
j
Solutions élémentaires pour Qj = 1 (9.1) (9.2)
Λ(t0) Matrice de complaisance élastique instantanée (9.2)
σélj εélj ,
ξél
j, qél
j
Solutions élémentaires pour Qj = 1 avec Jt0(t0) = 1 (9.3)
σél
k εél
k ,
ξél
k, Qél
k
Solutions élémentaires pour qk = 1 (9.6) (9.7)
A(t0) Matrice de module élastique instantanée (9.7)
σél
k εélk ,
ξél
k, Qél
k
Solutions élémentaires pour qk = 1 avec Et0(t0) = 1 (9.8)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Chapitre I – Approche unidimensionnelle 17
Comportement viscoélastique linéaire unidimensionnel
1. Évidences expérimentales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2. Expériences uniaxiales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.1. Expérience de retard, fonction de retard . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.2. Expérience de relaxation, fonction de relaxation . . . . . . . . . . . . . . . . . . . . . . . . . 212.3. Premiers commentaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.4. Recouvrance et effacement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.5. Autres expériences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.6. Expériences cruciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3. Comportement linéaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.1. Principe de superposition : matériaux Boltzmanniens . . . . . . . . . . . . . . . . . . . . 273.2. Élasticité linéaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4. Viscoélasticité linéaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.1. Élasticité instantanée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .284.2. Fonctions de retard et de relaxation en viscoélasticité linéaire . . . . . . . . . . . . 294.3. Réponse à une histoire de sollicitation quelconque . . . . . . . . . . . . . . . . . . . . . . . 314.4. Formules de Boltzmann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5. Modèle linéaire non-vieillissant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.1. Vieillissement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.2. Matériau non-vieillissant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 565.3. Matériau viscoélastique linéaire non-vieillissant . . . . . . . . . . . . . . . . . . . . . . . . . . 56
6. Modèles rhéologiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 446.1. Modèles élémentaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 446.2. Modèle de Maxwell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 466.3. Modèle de Kelvin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 476.4. Solide linéaire standard . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .48
7. Comportement viscoélastique linéaire unidimensionnel . . . . . . . . . . . . . . . 527.1. Point de vue uniaxial et modélisation unidimensionnelle . . . . . . . . . . . . . . . . . 527.2. Exemples d’applications à des éléments de structure . . . . . . . . . . . . . . . . . . . . . 54
8. Comportement sous sollicitation harmonique. Module complexe . . . . .568.1. Essai harmonique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 568.2. Régime harmonique asymptotique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 588.3. Exemple : sollicitation harmonique du solide linéaire standard . . . . . . . . . . . 588.4. Commentaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
9. Problèmes quasi-statiques de viscoélasticitélinéaire unidimensionnelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 609.1. Problématique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 609.2. Principe de superposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .619.3. Résolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 619.4. Théorème de correspondance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
18 Chapitre I – Approche unidimensionnelle
Exemples de mise en œuvre
10. Précontrainte élastique et viscoélasticité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6710.1. Définition du problème . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6710.2. Solution du problème d’évolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6810.3. Application pratique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
11. Étude d’une structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7011.1. Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7011.2. Poutre homogène isostatique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7011.3. Poutre homogène hyperstatique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7311.4. Poutre hétérogène . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Récapitulatif des formules essentielles . . . . . . . . . . . . . . . . . . . . . . . . . 80

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
1 – Évidences expérimentales 19
Comportement viscoélastique linéaireunidimensionnel
1 Évidences expérimentales
La pratique quotidienne, tant domestique qu’industrielle, abonde d’exemples quimettent en évidence le comportement différé de matériaux familiers. La lente dé-formation des étagères d’une bibliothèque, le retour progressif(1) à sa forme initialed’un échantillon de polymère déformé par une sollicitation temporaire, le fluage dubéton ou du bitume, etc. ne sont que quelques-unes des manifestations de ce type decomportement.
Quelques précisions quant aux échelles de temps impliquées dans les phénomènesprécédents sont ici utiles. Les qualificatifs « lente », « progressive », utilisés ci-dessussignifient que les temps caractéristiques de ces phénomènes sont très grands vis-à-visdes temps de propagation associés à la réponse « instantanée » du matériau dans lesystème étudié (pour un matériau élastique linéaire de module de Young E, de massevolumique ρ dans un système de dimension caractéristique `, ce temps est de l’ordrede
√
ρ`2/E.
Les effets de ces phénomènes sont différemment appréciés ou utilisés de diversesfaçons. On songe en premier lieu à des inconvénients au niveau du confort en service(pont à travées indépendantes par exemple, structure isostatique). Mais des consé-quences plus graves peuvent apparaître, telles que des déformations incompatiblesavec le fonctionnement de l’ouvrage (chemins de roulement, . . . ), qui peuvent mêmese révéler catastrophiques par la redistribution des efforts au cours du temps dans lesstructures hyperstatiques compensées ou par des pertes de précontrainte (cf. sections10 et 11). En revanche, les effets dissipatifs liés aux déformations différées expliquentl’utilisation des bitumes, mastics et polymères divers comme amortisseurs dans l’in-dustrie.
Il va de soi que les effets du comportement différé des matériaux sont d’autantmieux maîtrisés que l’on dispose d’une modélisation de ce comportement suffisammentpertinente. L’objet du présent chapitre est de construire de telles modélisations dansle cadre unidimensionnel pour la sollicitation et la réponse. On se limitera ici à desmodélisations adaptées aux applications en calcul des structures dans la pratiquecourante et qui se placent dans l’hypothèse des petites perturbations et dans lecadre isotherme.
(1)Et éventuellement incomplet.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
20 Chapitre I – Approche unidimensionnelle
2 Expériences uniaxiales
2.1 Expérience de retard, fonction de retard
Une expérience très simple permet de mettre en évidence et d’identifier le com-portement différé des matériaux : l’expérience isotherme de retard , parfois appeléeaussi expérience de fluage, sous sollicitation uniaxiale.
Pratiquement on la réalise en imposant à un corps d’épreuve de forme convenable(éprouvette de traction, éprouvette de compression, ...), homogène, une sollicitationuniaxiale en contrainte, réputée homogène, selon l’histoire suivante décrite, pourfixer les idées, dans le cas de l’expérience de retard en traction simple sur une éprou-vette de polymère en restant dans le cadre des petites déformations, la températureétant maintenue constante.
• L’éprouvette n’est initialement pas chargée ; elle est en équilibre et son matériauconstitutif est alors dans son état naturel (état de contrainte nul en tout point).
• À l’instant t0 on impose « instantanément » (cf. § 2.3) un échelon de contrainted’amplitude σ0.
• Cette contrainte est ensuite maintenue constante (figure 1a).
On observe la réponse uniaxiale correspondante, c’est-à-dire l’évolution dans letemps, ou l’histoire, de la déformation longitudinale ε, supposée homogène dansl’éprouvette, comptée à partir de l’état naturel pris comme référence géométrique(figure 1b).
σ0
σ
σ(t) = σ0Y (t− t0) = σ0Yt0(t)
tt0
ε
ε(t) = σ0 J(t0, t;σ0)
tt0
Figure 1 – Expérience de retard (fluage) à l’instant t0
Par définition, ε(t) est nulle jusqu’à l’instant t0.
À t0, « instantanément », une déformation ε(t0) est produite, qui traduit le com-portement instantané du matériau. Ensuite, pour t > t0 la déformation évolue :elle croît en fonction de t, de façon continue et monotone, la concavité de la courbeétant dirigée vers le bas, comme le représente typiquement la figure 1b).
La description mathématique de cette expérience est aisée.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
2 – Expériences uniaxiales 21
On désigne par Y (t) la fonction « échelon » de Heaviside appliquée à l’instant 0,définie par :
®
Y (t) = 0 t < 0 ,
Y (t) = 1 t ≥ 0 .(2.1)
et par Yτ (t) l’échelon appliqué à l’instant τ , soit
Yτ (t) = Y (t− τ) .(2.2)
L’histoire de σ représentée sur la figure 1a) s’écrit alors :
σ(t) = σ0Yt0(t)(2.3a)
σ = σ0Yt0 .(2.3b)
Il est commode de décrire la réponse correspondante par la formule :
ε(t) = σ0J(t0, t ;σ0)(2.4)
où®
J(t0, t ;σ0) = 0 si t < t0
J(t0, t ;σ0) croissante pour t ≥ t0 .
(2.5)
La discontinuité de J(t0, t ;σ0) pour t = t0, notée [[ J(t0, t0 ; σ0) ]], traduit la ré-
ponse instantanée du matériau à l’instant t0, dans cette expérience. On conviendradans toute la suite de désigner par J(t0, t0 ;σ0) la valeur à droite, c’est-à-dire pourt = t+0 , de cette fonction :
J(t0, t0 ; σ0) = J(t0, t+0 ; σ0) = [[J(t0, t0 ; σ0) ]],(2.6)
qui est positive, la valeur à gauche étant nulle par définition(2).
Si le matériau ne subit pas de transformation physique ou chimique brutale qui mo-difierait instantanément ses propriétés mécaniques, la fonction J(t0, t ;σ
0) est continuepar rapport à la variable t0.
L’expérience ainsi décrite est l’expérience de retard , effectuée à l’instant t0 avecl’amplitude σ0. La fonction J(t0, t ;σ
0) est la fonction de retard correspondante.
2.2 Expérience de relaxation, fonction de relaxation
L’expérience de relaxation isotherme est l’homologue de la précédente dans la-quelle la sollicitation imposée est désormais la déformation longitudinale ε et la ré-ponse observée est la contrainte σ.
(2)Dans le cas du matériau élastique, la réponse est ensuite constante.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
22 Chapitre I – Approche unidimensionnelle
À partir de l’état non chargé de l’éprouvette, dans lequel le matériau est dansl’étal naturel pris comme référence géométrique, on impose (cf. § 2.3) l’histoire dedéformation (figure 2a) :
ε(t) = ε0Yt0(t)(2.7a)
ε = ε0Yt0 .(2.7b)
et l’on observe la réponse σ (figure 2b) que l’on met sous la forme :
σ(t) = ε0R(t0, t ; ε0)(2.8)
où
R(t0, t ; ε0) = 0 si t < t0
[[R(t0, t0 ; ε0) ]] > 0 pour t = t0
R(t0, t ; ε0) ≥ 0 pour t > t0
R(t0, t ; ε0) décroissante pour t > t0
(2.9)
À l’instant t0, après le saut correspondant à la réponse instantanée du matériau, lacontrainte σ décroît en fonction de t > t0, de façon continue et monotone, la concavitéde la courbe étant dirigée vers le haut, comme le représente typiquement la figure 2b).
ε0
ε
ε(t) = ε0Y (t− t0) = ε0Yt0(t)
tt0
σ
σ(t) = ε0R(t0, t; ε0)
tt0
Figure 2 – Expérience de relaxation à l’instant t0
Comme pour la fonction de retard, on convient de poser :
R(t0, t0 ; ε0) = R(t0, t+0 ; ε0) = [[R(t0, t0 ; ε0) ]],(2.10)
la valeur à gauche étant nulle par définition(3).
Comme précédemment, si le matériau ne subit pas de transformation physique ouchimique brutale qui modifierait instantanément ses propriétés mécaniques, la fonctionR(t0, t ; ε
0) est continue par rapport à la variable t0.
L’expérience ainsi décrite est l’expérience de relaxation , effectuée à l’instantt0 avec l’amplitude ε0. La fonction R(t0, t ; ε
0) est la fonction de relaxation cor-respondante.
(3)Dans le cas du matériau élastique, la réponse est ensuite constante.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
2 – Expériences uniaxiales 23
2.3 Premiers commentaires
2.3.1 Retard et relaxation
Malgré leur similitude apparente, il existe une différence importante entre les ex-périences de retard et de relaxation quant à la possibilité effective de les réaliser.
• L’expérience de retard est toujours réalisable, quel que soit le matériau.
• En revanche, l’expérience de relaxation n’est réalisable que s’il est possible d’ap-pliquer au matériau un échelon de déformation instantané, c’est-à-dire si laréponse instantanée du matériau dans l’expérience de retard est non nulle :[[ J(t0, t0 ;σ0 ]] 6= 0, ∀σ0 6= 0.
Par ailleurs, l’expérience montre que les temps caractéristiques des phénomènesde retard et de relaxation sont, en règle générale, significativement différents : larelaxation est un phénomène plus rapide que le retard (fluage).
2.3.2 Temps et chronologie
Les descriptions précédentes sont évidemment valables quelle que soit l’originechoisie pour la variable temps. Au plan pratique il va de soi que, puisque l’on cherchepar ces expériences à identifier certains aspects des comportements instantané et dif-féré du matériau étudié, il sera commode de rattacher la chronologie à une origine quisoit significative pour l’échantillon considéré. Ce pourra être, par exemple, l’instant deson élaboration. Aussi, lorsque des échantillons d’âges différents sont impliqués dansune même étude, on doit porter une grande attention au calage des diverses chrono-logies qui leur sont propres. On aura l’occasion de revenir sur ce point ultérieurement(§ 11.4).
2.3.3 Sollicitations et réponses instantanées
La discussion abordée dans la section 1 à propos des échelles de temps pour qua-lifier le caractère différé du comportement du matériau doit être reprise ici à proposde la mise en œuvre pratique de l’échelon instantané de contrainte ou de déforma-tion. En effet le temps de mise en charge correspondant (temps pratique de montéeen plateau sur les figures 1a et 2a) doit être à la fois suffisamment court pour êtreconsidéré comme instantané et suffisamment long pour correspondre à une évolutionquasi-statique : il doit donc être grand mais non très grand devant les temps depropagation évoqués dans la section 1.
2.4 Recouvrance et effacement
2.4.1 Recouvrance
L’expérience de recouvrance n’est autre que l’expérience de charge-décharge rela-tive à l’expérience de retard. Elle consiste à imposer une sollicitation en « créneau » :le plateau de la figure 1a, d’amplitude σ0 à partir de l’instant t0 , est interrompu parune décharge instantanée de même amplitude à l’instant t1, (figure 3a).

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
24 Chapitre I – Approche unidimensionnelle
σ0
σ
σ(t) = σ0Yt0(t) − σ0Yt1(t)
tt1t0
ε
Retour instantané
Recouvrance
tt1t0
Figure 3 – Expérience de recouvrance
L’histoire de la sollicitation s’écrit ainsi, avec t0 < t1 :
σ(t) = σ0[Yt0(t) − Yt1(t)](2.11a)
σ = σ0(Yt0 − Yt1) .(2.11b)
La réponse typique en déformation est représentée sur la figure 3b). Évidemmentidentique à celle de l’expérience de retard pour t < t1, elle comporte une réponseinstantanée décroissante à l’instant t1, suivie d’une évolution monotone décroissantepour t > t1.
Le phénomène de « récupération » du matériau ainsi mis en évidence porte le nomde recouvrance. Cette recouvrance(4) est dite totale si la déformation ε s’annule pourt suffisamment grand ou lorsque t→ ∞ : il n’y a alors pas de déformation permanentedu matériau après décharge totale.
2.4.2 Effacement des contraintes
L’expérience d’effacement se rattache à l’expérience de relaxation, vis-à-vis delaquelle elle est l’homologue de l’expérience de recouvrance (figure 4). La sollicitationen créneau est, avec t0 < t1 (figure 4a) :
ε(t) = ε0[Yt0(t) − Yt1(t)](2.12a)
ε = ε0(Yt0 − Yt1) .(2.12b)
La réponse typique en contrainte (figure 4b) est identique à celle de l’expériencede relaxation pour t < t1. Elle comporte une réponse instantanée décroissante à
(4)Ce phénomène ne doit pas être confondu avec la résilience, qui caractérise la résistance desmatériaux aux chocs et qui fut introduite par Thomas Young (1807) : « there is, however, a limitbeyond which the velocity of a body striking another cannot be increased without overcoming itsresilience and breaking it . . . ». Pour l’anecdote, on notera que Thomas Young était docteur enmédecine de l’université de Göttingen et que le concept de résilience est actuellement utilisé enpsychanalyse

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
2 – Expériences uniaxiales 25
l’instant t1 lorsque l’on ramène la déformation à la valeur nulle, suivie d’une évolutionde la contrainte monotone décroissante en valeur absolue.
Le phénomène correspondant porte le nom d’effacement (de la contrainte). Si σs’annule pour t suffisamment grand ou lorsque t→ ∞, l’effacement est total.
ε0
ε
ε(t) = ε0Yt0(t) − ε0Yt1(t)
t0 t1
σ
Effacement
t0 t1
tt
Figure 4 – Expérience d’effacement
2.5 Autres expériences
Les expériences décrites ci-dessus permettent d’appréhender le comportement dif-féré d’un matériau mais ne suffisent pas pour le déterminer. Chaque histoire de solli-citation (en contrainte, en déformation, ou mixte) est un cas nouveau dont, en règlegénérale, la description ne peut être obtenue à partir des expériences précédentes.
On traitera dans la suite du cas du comportement linéaire pour lequel l’intérêtporté ci-dessus aux expériences fondamentales se révélera pleinement justifié puisqu’ilest alors possible d’écrire la réponse à toute histoire de sollicitation isotherme à partirdu seul « catalogue » des expériences de retard isothermes ou de celui des expériencesde relaxation isothermes.
2.6 Expériences cruciales
On sait que, pour un matériau élasto-plastique soumis à un processus de char-gement uniaxial, l’expérience de charge-décharge permet de distinguer les com-portements élastique et plastique. En deçà du seuil de plasticité, l’accroissement dedéformation produit par un incrément de charge est instantané et est intégralementet instantanément récupéré lorsque l’on effectue une décharge d’amplitude équiva-lente. On parle ainsi de réversibilité de la déformation élastique. Au delà du seuil deplasticité, en effectuant la même expérience, la décharge révèle la partie élastique del’accroissement de déformation produit à la charge, dont le complément pour aboutirà l’accroissement total est la partie plastique.
En d’autres termes, en se référant aux expériences décrites plus haut (§ 2.4), l’ex-périence cruciale qui est ainsi utilisée est l’expérience de recouvrance : lorsque

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
26 Chapitre I – Approche unidimensionnelle
le comportement du matériau est élastique la réponse ε dans l’expérience de recou-vrance, ∀t0, ∀t1 > t0, est un créneau proportionnel à celui de σ. En toute rigueur,l’expérience de recouvrance doit être effectuée instantanément (t1 → t0) pour excluretout phénomène de vieillissement du matériau (par transformation physique ouchimique par exemple) susceptible de modifier ses caractéristiques élastiques(5). Dansl’hypothèse habituelle d’absence de vieillissement, la décharge dans l’expérience derecouvrance peut être effectuée à n’importe quel instant postérieur à la charge. Si,de plus, le matériau est linéairement élastique(6) le coefficient de proportionnalité estindépendant de la valeur (algébrique) de l’incrément de charge et détermine le moduled’élasticité E du matériau : l’amplitude du créneau de déformation est égale à σ0/E.
Dans le cas particulier de ce comportement, les rôles de σ et de ε peuvent êtreéchangés et, de façon équivalente, l’expérience d’effacement peut être utiliséecomme expérience cruciale : la réponse σ dans l’expérience d’effacement, ∀t0, ∀t1 > t0,est un créneau proportionnel à celui de ε, dont l’amplitude est E ε0 dans le cas del’élasticité linéaire.
Puisque l’on s’intéresse désormais à un matériau dont la réponse n’est pas ins-tantanément acquise dans son intégralité, on s’attache d’abord à en qualifier le com-portement instantané. À chaque instant t0, cet aspect du comportement est révélédans l’expérience de recouvrance (2.11) effectuée « instantanément », c’est-à-dire avect1 → t0. Par définition, le comportement instantané à l’instant t0 est élastique si lessauts de déformation observés à t0 puis à t1 sont opposés lorsque t1 → t0, t1 > t0.
Dans toute la suite on ne s’intéresse qu’à des matériaux dont le comportementinstantané est élastique (pas de déformation instantanée irréversible, c’est-à-direpas de déformation plastique) et, de plus, pour les applications au calcul des structuresindustrielles ou au génie civil, on suppose que le module d’élasticité instantané estfini, ce qui exclut les matériaux indéformables instantanément.
En ce qui concerne le comportement différé, la distinction entre la viscoélasticitéet la viscoplasticité se révèle plus délicate dans le cas général si l’on s’en tient à l’ap-proche phénoménologique sans prise en considération des phénomènes physiques misen jeu dans le comportement différé. La simple transposition au niveau du compor-tement différé de l’expérience de recouvrance comme expérience cruciale n’est paspertinente : l’idée intuitive serait en effet alors de caractériser la viscoélasticité parla propriété de recouvrance totale, ce qui est immédiatement contredit par la consi-dération d’exemples simples (cf. § 6.1.2). Mandel a proposé, d’adopter l’expérienced’effacement comme expérience cruciale et de caractériser la viscoélasticité par lapropriété d’effacement total (7). Il semble que cette définition permette de couvrirl’ensemble des modèles réalistes.
(5)À titre d’exemple, une élévation de température importante (de l’ordre de 500 K) produit unaffaiblissement puis, une fois la température critique atteinte, une chute brutale du module d’élasticitéde l’acier.
(6)Cf. section 3(7)Cette caractérisation exclut le cas des matériaux indéformables instantanément

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
3 – Comportement linéaire 27
3 Comportement linéaire
3.1 Principe de superposition : matériaux Boltzmanniens
Les évidences expérimentales relatives au comportement de divers matériaux pourdes histoires de sollicitations complexes, en contrainte ou en déformation imposées,conduisent à introduire le concept de matériaux Boltzmanniens dont la définitions’exprime par le principe de superposition (de Boltzmann) sous la forme concrètesuivante.
On se place dans l’hypothèse des petites transformations qui justifie, d’une façongénérale, le recours au tenseur des contraintes de Cauchy σ et au tenseur des défor-mations linéarisé ε et à sa dérivée temporelle ε pour la description du comportement :
Pour un matériau Boltzmannien, la superposition des sollicitationsimplique la superposition homologue des réponses.
Dans une formulation plus mathématique, le principe de superposition énonce lalinéarité du comportement du matériau considéré.
Plus précisément, en se plaçant dans le cas de sollicitations isothermes et dansle cadre uniaxial, on se réfère à la loi de comportement isotherme du matériau, quitraduit la correspondance fonctionnelle entre l’histoire de σ et l’histoire de ε.
À chaque instant t, la déformation ε(t) dépend de l’histoire de la contrainte σjusqu’à cet instant. On exprimera cette correspondance univoque par l’équation (3.1)
dans laquelle[ t
σ(τ)−∞
]
représente symboliquement l’histoire de σ et où les bornes infé-
rieure (−∞) et supérieure (t) pour la variable τ traduisent le principe de causalité :l’histoire de σ postérieure à l’instant actuel t ne peut influer sur la valeur de ε(t).
ε(t) = Ft
[ t
σ(τ)−∞
]
.(3.1)
Si la correspondance inverse de (3.1) est définie (8), elle s’écrit de la même façon :
σ(t) = Rt
[ t
ε(τ)−∞
]
.(3.2)
Sans entrer dans les détails mathématiques, l’équation (3.1) définit, à partir del’ensemble des histoires de σ un ensemble d’histoires de ε. On désigne par F la cor-respondance fonctionnelle univoque qui associe à chaque histoire de σ l’histoire de εainsi définie :
σF7−→ ε .(3.3a)
(8)En effet, les rôles de σ et de ε ne sont pas interchangeables : la correspondance inverse peut nepas être univoque, une même histoire de ε peut être issue de plusieurs histoires de σ distinctes.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
28 Chapitre I – Approche unidimensionnelle
Réciproquement, sur l’ensemble des histoires de ε engendré par (3.3a), si (3.2)existe, on désigne par R la correspondance fonctionnelle inverse, qui associe à chacunede ces histoires l’histoire de σ définie par (3.2) :
εR7−→σ .(3.3b)
Le principe de superposition s’explicite mathématiquement en énonçant la li-néarité de la fonctionnelle F . Considérant deux histoires σ(1) et σ(2) de σ et lesdeux histoires ε(2) et ε(2) qui leur sont associées par (3.1) et (3.2), alors l’histoire deε qui est associée à l’histoire σ = λ1σ(1) +λ2σ(2), combinaison linéaire quelconque deσ(1) et σ(2), est la combinaison linéaire homologue ε = λ1 ε(1) + λ2 ε(2). Ainsi :
F(λ1 σ(1) + λ2 σ(2)) = λ1F(σ(1)) + λ2F(σ(2))(3.4a)
et pour la correspondance fonctionnelle inverse R on a de même(9) :
R(λ1 ε(1) + λ2 ε(2)) = λ1R(ε(1)) + λ2R(ε(2)) .(3.4b)
3.2 Élasticité linéaire
L’exemple le plus classique de comportement Boltzmannien est évidemment celuide l’élasticité linéaire déjà évoqué au paragraphe 2.6.
Les correspondances fonctionnelles (3.1, 3.2) prennent alors les formes :
ε(t) = Ft
[ t
σ(τ)−∞
]
= σ(t)/E .(3.5)
et
σ(t) = Rt
[ t
ε(τ)−∞
]
= E ε(t) .(3.6)
4 Viscoélasticité linéaire
4.1 Élasticité instantanée
On fait désormais l’hypothèse, qui devra être validée par l’expérience, quele comportement uniaxial du matériau étudié obéit au principe de superposition deBoltzmann exprimé par les équations (3.4a et 3.4b).
On s’attache d’abord à qualifier le comportement instantané du matériau. Pardéfinition, le comportement instantané à l’instant t0, révélé dans l’expérience de re-couvrance (2.11) est élastique si les sauts de déformation observés à t0 puis à t1 sontopposés lorsque t1 → t0, t1 > t0. L’expérience, qui est réversible, détermine ainsi lemodule d’élasticité du matériau à l’instant t0 considéré.(10)Si les propriétés élastiquesde ce matériau n’évoluent pas avec le temps – absence de « vieillissement » – cemodule instantané est constant.
(9)Dans le cas uniaxial considéré ici la linéarité de F implique l’existence et la linéarité de R.(10)Dans le cas d’une expérience de traction simple, il peut être tentant de noter ce module E(t0) ;on verra, au chapitre II (§ 4.2.4 et 5.5.2) que cette notation peut être cause de confusions.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
4 – Viscoélasticité linéaire 29
4.2 Fonctions de retard et de relaxation en viscoélasticitélinéaire
L’hypothèse de la linéarité de comportement implique des conséquences immé-diates sur les fonctions de retard et de relaxation définies dans la section 2, quiconstituent autant de tests pour la validation expérimentale de la pertinence de cettehypothèse.
4.2.1 Fonction de retard
L’application de (3.4) à l’expérience de retard montre que, à t0 fixé, ε(t) est pro-portionnelle à σ0 quel qu’en soit le signe (traction ou compression). Ainsi la fonctionde retard définie par (2.4) est indépendante de σ0 :
σ(t) = σ0 Yt0(t)
ε(t) = σ0 J(t0, t), ∀σ0
(4.1)
ou encore
σ = σ0Yt0F7−→ ε = σ0 Jt0 , ∀σ
0 ,(4.2)
où l’on a posé
Jt0(t) = J(t0, t) .(4.3)
4.2.2 Fonction de relaxation
De façon totalement homologue on déduit de la linéarité de la fonctionnelle R lapropriété de la fonction de relaxation :
ε(t) = ε0Yt0(t)
σ(t) = ε0R(t0, t), ∀ε0
(4.4)
ou encore
ε = ε0Yt0R7−→σ = ε0Rt0 , ∀ε
0 ,(4.5)
où l’on a posé
Rt0(t) = R(t0, t) .(4.6)
4.2.3 Propriétés des fonctions de retard et de relaxation
Pour les matériaux considérés ici, dont le module d’élasticité instantané est fini,dans le cas où l’hypothèse de linéarité du comportement est validée, les fonctionsJ(τ, t) etR(τ, t) possèdent les propriétés mathématiques récapitulées dans les formulessuivantes qui incluent les propriétés à τ fixé (2.5 et 2.9) déjà énoncées pour les fonctionsJ(t0, t ;σ
0) et R(t0, t ; ε0).

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
30 Chapitre I – Approche unidimensionnelle
J(τ, t) = 0 pour t < τ
J(τ, τ) > 0
J(τ, t) croissante(11) de t pour τ ≤ t
J(τ, t) continue et continûment différentiable
par rapport à τ et à t pour τ < t
(4.7)
et
R(τ, t) = 0 pour t < τ
0 < R(τ, τ) <∞
R(τ, t) ≥ 0 pour τ ≤ t
R(τ, t) décroissante de t pour τ ≤ t
R(τ, t) continue et continûment différentiable
par rapport à τ et à t pour τ < t .
(4.8)
On rappelle que, par définition (2.6 et 2.10), on a posé :
J(τ, τ) = J(τ, τ+) et R(τ, τ) = R(τ, τ+) .(4.9)
4.2.4 Expériences de recouvrance et d’effacement
Le principe de superposition permet de décrire les réponses dans les expériencesde recouvrance et d’effacement à partir des expériences de retard et de relaxation etdes fonctions correspondantes.
• Recouvrance
Par linéarité, la réponse à la sollicitation (2.11), σ = σ0(Yt0 − Yt1), s’obtient àpartir de (4.1) et s’écrit, ∀σ0, ∀t0, ∀t1 > t0 :
ε = σ0(Jt0 − Jt1)(4.10a)
ou, de façon explicite,
ε(t) = σ0[J(t0, t) − J(t1, t)] .(4.10b)
• Effacement
De la même manière, la réponse à la sollicitation ε = ε0(Yt0 −Yt1) de l’expérienced’effacement (2.12) s’obtient à partir de (4.4) et s’écrit, ∀σ0, ∀t0, ∀t1 > t0 :
σ = ε0(Rt0 −Rt1)(4.11a)
(11)J(τ, t) et R(τ, t) constantes pour τ ≤ t dans le cas du matériau élastique (cf. § 6.1.1).

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
4 – Viscoélasticité linéaire 31
ou, de façon explicite,
σ(t) = ε0[R(t0, t) −R(t1, t)] .(4.11b)
• Identification des comportements instantané et différé
L’expression (4.10) de la réponse dans l’expérience de recouvrance, associée à lacontinuité de J(τ, t) par rapport à τ , montre que lorsque cette expérience est effectuée« instantanément », c’est-à-dire avec t1 → t0, les sauts de déformation observés à t0puis à t1 sont opposés puisque :
limt1→t0,t1>t0
ε(t) = σ0[(J(t0, t) − J(t1, t)] = 0, ∀t > t1 > t0 .(4.12)
Ceci rend compte du caractère élastique du comportement linéaire instantané.Le module d’élasticité instantané à l’instant t0 est égal à R(t0, t0) et les fonctions deretard et de relaxation vérifient la relation :
J(τ, τ)R(τ, τ) = 1, ∀ τ .(4.13)
En ce qui concerne le comportement différé, si l’on retient la caractérisation de laviscoélasticité proposée par Mandel (cf. § 2.6), en viscoélasticité linéaire la fonction derelaxation doit vérifier une propriété supplémentaire de comportement à l’infini(12) :
limt→∞
(R(t0, t) −R(t1, t) = 0, ∀t0, ∀t1 > t0 .(4.14)
4.2.5 Exemple de validation
À titre d’exemple on considère le cas du béton pour lequel on examine dans quellemesure son comportement uniaxial instantané et différé peut être représenté par lemodèle viscoélastique linéaire.
En ce qui concerne l’expérience de retard, on constate habituellement que, pourles sollicitations en compression, la fonction de retard J(t0, t ;σ
0) n’est pas indépen-dante de σ0 et apparaît, en fait, comme une fonction croissante de σ0, ce qui estcontradictoire avec l’hypothèse de linéarité. Toutefois, il est courant d’admettre quesi σ0 ne dépasse pas 70% de la contrainte de rupture en compression, l’approximationJ(t0, t ;σ
0) = J(t0, t) est légitime. Dans l’expérience de recouvrance, la réponse nesuit pas la formule (4.10), le retour après décharge se révélant plus faible que celuiprévu par cette formule.
Malgré ces lacunes, on adopte le modèle viscoélastique linéaire pour modéliser lecomportement uniaxial du béton en compression dans des applications courantes encalcul des structures, ne serait-ce que pour une première approche. Ce comportementest alors défini , comme on le verra dans la section suivante, par la seule donnée dela fonction de retard J(t0, t).
4.3 Réponse à une histoire de sollicitation quelconque
Les résultats précédents incitent naturellement à chercher à exprimer la réponse àune histoire de sollicitation quelconque en contrainte ou en déformation, c’est-à-dire à
(12)Ceci n’implique évidemment pas la propriété homologue pour la fonction de retard !

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
32 Chapitre I – Approche unidimensionnelle
expliciter les correspondances (3.3) inverses l’une de l’autre. Le résultat cherché étant,en fait, relativement banal du point de vue mathématique sous réserve de quelques« précautions », il parait intéressant pour sa meilleure compréhension d’en donnerune présentation à caractère intuitif. Plutôt que de sollicitation en contrainte ou endéformation, on parlera dans la suite d’histoire donnée de contrainte ou de défor-mation, la réponse étant l’histoire de déformation ou de contrainte correspondante :on distingue ainsi les correspondances fonctionnelles F et R dans (3.3).
Histoire de contrainte donnée
On considère une histoire σ, nulle pour t < t0, continue et dérivable, par mor-ceaux , pour t > t0. On désigne par τi les instants où σ est discontinue, parmi lesquelsfigure éventuellement t0, et par [[σ ]]i les sauts correspondants. On convient désormaisdans toutes les formules de désigner par σ(t), ε(t), etc., les valeurs à droite des fonc-tions concernées : en conséquence, l’instant actuel t, s’il est point de discontinuité,figure parmi les instants τi tels que τi ≤ t. On peut alors expliciter σ(t) sous la forme :
σ(t) =
∫ t
t+0
Yτ (t) dσ(τ) +∑
τi≤t
[[σ ]]i Yτi(t)(4.15)
c’est-à-dire que σ apparaît comme la somme infinie d’expériences de retard infinitési-males à l’instant courant τ d’amplitude dσ(τ), et d’expériences de retard d’amplitudefinie [[σ ]]i aux instants τi ≤ t (figure 5).
σ
Yτ (t) dσ(τ)
[[σ ]]0 Yτ0(t)
tτiττ0
Figure 5 – Interprétation de σ(t) comme une intégrale de Stieltjes
La formule (4.15) est la définition de l’intégrale de Stieltjes :
σ(t) =
∫ t
−∞
σ′(τ) dτ,(4.16)
qui revient à interpréter la dérivée σ′ de σ sous l’intégrale (4.16) au sens des distri-butions :
σ′ = σ′ +∑
τi≤t
[[σ ]]i δτi,(4.17)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
4 – Viscoélasticité linéaire 33
où δτiest la mesure de Dirac en τi et où σ′ désigne la distribution définie par la
fonction dérivée de σ.
La réponse à l’histoire σ découle immédiatement de l’application du principe desuperposition à la formule (4.15) :
ε(t) =
∫ t
t+0
J(τ, t) dσ(τ) +∑
τi≤t
[[σ ]]iJ(τi, t)(4.18)
qui peut aussi s’écrire sous la forme de l’intégrale de Stieltjes :
ε(t) =
∫ t
−∞
J(τ, t)σ′(τ) dτ(4.19a)
ou encore, en tenant compte des propriétés de Jτ ,
ε(t) =
∫ ∞
−∞
J(τ, t)σ′(τ) dτ .(4.19b)
La formule (4.18) fondée sur le raisonnement pragmatique de la Figure 5, pourraitconduire à une interprétation erronée(13). En effet, elle semble conférer à tous lesinstants τi ≤ t (dont, éventuellement, l’instant du début de l’histoire) le caractère depoints exceptionnels de la fonctionnelle ε(t), c’est-à-dire tels que la modification desvaleurs de σ en ces seuls instants entraînerait une variation de ε(t) pour tous lesinstants ultérieurs. Il n’en est rien : la réponse ε(t) à l’instant t est la même pour deuxhistoires de σ qui ne diffèrent l’une de l’autre que par leurs valeurs en des instantsτi strictement antérieurs à t, (τi < t), : seul l’instant actuel t possède le caractèrede point exceptionnel. En effet l’ambiguïté disparaît si l’on procède à l’intégrationpar parties de l’intégrale dans (4.18), ce qui nécessite de bien prendre en compte lesdiscontinuités de σ aux points τi ≤ t et la condition à l’infini σ(−∞) = 0. On obtientainsi la formule de Boltzmann :
ε(t) = σ(t)J(t, t) −
∫ t
t0
σ(τ)∂J
∂τ(τ, t) dτ(4.20)
L’importance de cette nouvelle expression tient au fait qu’elle décompose la dé-formation actuelle ε(t) en la somme de deux termes physiquement significatifs.
• Le premier, σ(t)J(t, t), exprime la réponse instantanée, à l’instant actuel t, à lasollicitation en ce même instant, c’est-à-dire à σ(t). (On rappelle que l’on a défini,de façon générale, J(τ, τ) = J(τ, τ+)).
• Le second,−∫ t
t0σ(τ)
∂J
∂τ(τ, t) dτ , est l’intégrale de mémoire de toute l’histoire
antérieure à t et exprime le résultat du comportement différé du matériau. Comptetenu des propriétés (4.7) énoncées pour la fonction Jτ ce terme ne comporte aucunesingularité.
(13)L’intégrale de Stieltjes (4.19) est sans ambiguïté.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
34 Chapitre I – Approche unidimensionnelle
Il résulte de cette décomposition que le seul instant qui possède un caractèreexceptionnel pour la fonctionnelle ε(t) est l’instant actuel t , en manifestation de laréponse élastique instantanée du matériau.
La formule (4.20) peut aussi se mettre sous la forme d’une intégrale de Stieltjesen remarquant que la dérivée partielle par rapport à τ de J(τ, t), prise au sens desdistributions est :
∂J
∂τ(·, t) =
∂J
∂τ(·, t)
− J(t, t) δt,(4.21)
d’où l’intégrale de Stieltjes
ε(t) = −
∫ ∞
−∞
σ(τ)∂J
∂τ(τ, t) dτ .(4.22)
Ceci permet de compléter l’interprétation physique de la formule de Boltzmann :
• Issu de l’expérience de retard, J(t, t) est la complaisance élastique qui donnela réponse instantanée à l’échelon unité appliqué à l’instant t .
• −∂J
∂τ(τ, t) est la réponse, observée à l’instant t, à l’impulsion unité appliquée à
l’instant τ, (τ < t), c’est-à-dire à δτ (14).
Histoire de déformation donnée
On part maintenant d’une histoire de ε donnée, nulle pour t = −∞, continue etdérivable, par morceaux , par rapport au temps, et présentant des sauts [[ ε ]]i auxinstants τi. Sans reproduire dans le détail les raisonnements du paragraphe précédent,on voit que la réponse σ à cette histoire de déformation s’obtient en permutant dansles formules précédentes les rôles de σ et de ε et en faisant intervenir la fonction derelaxation R(τ, t) au lieu de J(τ, t). Il en résulte les expressions suivantes :
σ(t) =
∫ t
t+0
R(τ, t) dε(τ) +∑
τi≤t
[[ ε ]]iR(τi, t)(4.23)
où, sous la forme d’une intégrale de Stieltjes,
σ(t) =
∫ ∞
−∞
R(τ, t) ε′(τ) dτ(4.24)
avec
ε′ = ε′ +∑
τi≤t
[[ ε ]]i δτi.(4.25)
L’intégration par parties conduit à la formule de Boltzmann :
σ(t) = ε(t)R(t, t) −
∫ t
t0
ε(τ)∂R
∂τ(τ, t) dτ(4.26)
(14)On remarque que c’est ici la réponse à l’échelon unité qui joue le rôle primordial alors qu’habi-tuellement les analyses des comportements linéaires se réfèrent à la réponse à l’impulsion unité. Ceciest évidemment dû à la nature physique de l’expérience quasi-statique fondamentale.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
4 – Viscoélasticité linéaire 35
ou, sous la forme d’une intégrale de Stieltjes,
σ(t) = −
∫ ∞
−∞
ε(τ)∂R
∂τ(τ, t) dτ .(4.27)
4.4 Formules de Boltzmann
4.4.1 Opérateur intégral
On remarque que, dans leur structure, les expressions (4.20) et (4.26) sont stric-tement identiques, construites respectivement sur les fonctions de retard et de re-laxation. Ainsi les correspondances fonctionnelles F et R, linéaires, inverses l’une de
l’autre, s’expriment avec le même opérateur intégral construit avec la dérivée∂J
∂τ(τ, t)
pour F et la dérivée∂R
∂R(τ, t) pour R, ces dérivées étant prises au sens des distribu-
tions.
Pour accroitre la lisibilité des formules et faciliter la comparaison avec le cas par-ticulier du matériau non-vieillissant traité dans la suite (section 5), on peut adopterpour les correspondances fonctionnelles (3.3) la forme (4.28), explicitée par (4.20)et (4.26) :
σF7−→ ε = − <
∂J
∂τ, σ >= J (×)σ
εR7−→σ = − <
∂R
∂τ, ε >= R (×) ε
(4.28)
4.4.2 Quelques identités autour de l’opérateur intégral
Élément neutre
Si J(τ, t) = Yτ (t) = Y (t− τ) ou R(τ, t) = Yτ (t) = Y (t− τ), on a évidemment :
∀σ, J (×)σ = σ
∀ε,R (×) ε = ε .(4.29)
Cette constatation ne doit pas surprendre car il s’agit simplement de la forme desfonctions de retard et de relaxation dans le cas du comportement purement élastiquelinéaire (cf. § 6.1.1) :
J(τ, t) =1
EYτ (t) et R(τ, t) = E Yτ (t) .(4.30)
Formules d’inversion
En décrivant les expériences de retard et de relaxation au moyen des formulesgénérales (4.28) on obtient les identités évidentes, valables ∀t0 :

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
36 Chapitre I – Approche unidimensionnelle
(4.31) Jt0 = J (×)Yt0
(4.32) Rt0 = R (×)Yt0
L’inversion de (4.31) par (4.28) fournit la relation
∀t0, R (×)Jt0 = Yt0(4.33)
et l’inversion de (4.32) s’écrit :
∀t0, J (×)Rt0 = Yt0 .(4.34)
Ces deux formules explicitent la façon dont les fonctions de retard et de relaxationsont inverses les unes des autres pour l’opérateur intégral. Elles s’expriment aussi sousla forme :
<∂R
∂τ,∂J
∂t0>=<
∂J
∂τ,∂R
∂t0>= δt0(4.35a)
soit∫ ∞
−∞
∂R
∂τ(τ, t)
∂J
∂t0(t0, τ) dτ =
∫ ∞
−∞
∂J
∂τ(τ, t)
∂R
∂t0(t0, τ) dτ = δ(t− t0) .(4.35b)
Plus que les relations (4.35), les formules (4.33) et (4.34) se révèlent utiles dans lapratique comme formules d’inversion « à vue ».
On peut enfin signaler que la formule d’inversion entre le module élastique instan-tané et la complaisance instantanée (4.13) est une conséquence particulière de (4.33),(4.34) ou (4.35).
4.4.3 En conclusion
Les formules de Boltzmann mettent en évidence que la linéarité du comportementest une propriété forte qui implique que le comportement différé du matériau est,comme annoncé au paragraphe (4.2.4), entièrement décrit par la seule connaissancede ses fonctions de retard ou de ses fonctions de relaxation . Le qualificatifde « fondamentales » donné aux expériences correspondantes se trouve, dès lors,complètement justifié.
5 Modèle linéaire non-vieillissant
5.1 Vieillissement
Après le choix d’une origine pour la variable temps, effectué de façon physiquementsignificative pour le matériau étudié, les expériences d’identification du comportement

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
5 – Modèle linéaire non-vieillissant 37
montrent que les propriétés physiques du matériau étudié – en particulier ses caracté-ristiques mécaniques – peuvent évoluer indépendamment des sollicitations mécaniquesauxquelles il est soumis. Ce peut être le résultat de causes et de phénomènes divers :température, hygrométrie, rayonnements 1umineux (notamment U.V.), rayonnementsionisants, réactions chimiques, cristallisation, fusion, propagation de défauts, etc.
Ce phénomène général porte le nom de vieillissement. Ce terme est souvent associéà une connotation négative, impliquant une dégradation des propriétés mécaniques– c’est le cas, notamment, pour les polymères – toutefois le vieillissement est loind’être toujours un phénomène néfaste : il suffit, pour s’en convaincre, de considérerpar exemple le cas du béton et de comparer ses propriétés à 1, 7 et 28 jours.
5.2 Matériau non-vieillissant
Si le vieillissement est une propriété générale de tout matériau à partir de l’instantde son élaboration, il se manifeste de façon plus ou moins marquée suivant les cas etsuivant les époques de 1’histoire du matériau concerné. C’est ainsi qu’il existe souventpour un matériau donné une période significative où ses propriétés mécaniques sont,en quelque sorte, « stabilisées » et n’évoluent pas avec le temps.
Le matériau est alors dit non-vieillissant .
Mathématiquement cela signifie que si l’on considère deux histoires de contrainte,soient σ et σu, décalées l’une de l’autre dans le temps par translation d’un inter-valle u
∀u, ∀τ, σu(τ) = σ(τ − u),(5.1)
les histoires de déformation correspondantes associées par les formules (3.1) et (3.2)sont ε et εu, elles aussi décalées l’une de l’autre par la même translation de durée u(Figure 6). Ainsi :
∀σ, ∀u, σF7−→ ε⇔ σu
F7−→ εu avec εu(τ) = ε(τ − u)∀τ,(5.2)
soit
Ft−u
[ t−u
σ(τ)−∞
)]
= Ft
[ t
σ(τ − u)−∞
]
, ∀σ, ∀u,(5.3)
et la formule homologue pour R
Rt−u
[ t−u
ε(τ)−∞
]
= Rt
[ t
ε(τ − u)−∞
]
, ∀ε, ∀u .(5.4)
5.2.2. Fonctions de retard et de relaxation
Si l’on considère les deux expériences de retard définies par les histoires de sollici-tation
σ(τ) = σ0Y (τ) et σu(τ) = σ0Yu(τ) = σ0Y (τ − u),(5.5)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
38 Chapitre I – Approche unidimensionnelle
replacemen
sollicitation
τu
réponse
τu
Figure 6 – Invariance du comportement par translation sur le temps.
qui sont décalées l’une de l’autre par translation dans le temps d’amplitude u, lesréponses s’écrivent, par définition :
ε(τ) = σ0J(0, τ ;σ0) et εu(τ) = σ0J(u, τ ;σ0) .(5.6)
En conséquence de l’hypothèse de non-vieillissement, il vient, en application de(5.2) et (5.3) :
J(u, τ ;σ0) = J(0, τ − u;σ0) .(5.7)
De la même façon, pour les fonctions de relaxation, on montre que :
R(u, τ ; ε0) = R(0, τ − u; ε0) .(5.8)
En d’autres termes, les fonctions de retard et de relaxation, invariables par trans-lation dans le temps, ne dépendent de leurs arguments temporels que par la différencede ceux-ci. On écrira :
®
J(t0, t;σ0) = f(t− t0;σ
0)
avec f(τ ;σ0) = 0 si τ < 0(5.9)
et
®
R(t0, t; ε0) = r(t − t0; ε
0)
avec r(τ ; ε0) = 0 si τ < 0 .(5.10)
Les formules (5.7) et (5.8) fournissent évidemment des tests simples pour la vali-dation de l’hypothèse de non-vieillissement.
5.3 Matériau viscoélastique linéaire non-vieillissant
Fonctions de retard et de relaxation
Si le comportement du matériau non-vieillissant considéré est viscoélastique li-néaire, il suffit de rassembler les résultats des paragraphes 4.2 et 5.2 pour obtenirl’ensemble des propriétés des fonctions de retard et de relaxation J(t0, t) et R(t0, t).

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
5 – Modèle linéaire non-vieillissant 39
Ainsi :
J(t0, t) = f(t− t0)
f(τ) = 0 si τ < 0
f(0) > 0
f ′(τ) ≥ 0, f ′′(τ) ≤ 0 pour τ > 0
(5.11)
et
R(t0, t) = r(t− t0)
r(τ) = 0 si τ < 0
r(0) > 0
r′(τ) ≤ 0, r′′(τ) ≥ 0 pour τ > 0
(5.12)
Cela signifie que le « catalogue » des fonctions de retard se déduit de la seulefonction f qui ne dépend que d’un argument et qui apparaît comme la fonction deretard pour l’expérience effectuée « à l’instant zéro ». On l’appelle couramment lafonction de retard du matériau. De même, r est la fonction de relaxation dumatériau, qui permet de définir l’ensemble des fonctions de relaxation.
On définit aussi ft0 et rt0 par :
ft0(t) = f(t− t0)(5.13)
et
rt0(t) = r(t− t0) .(5.14)
5.3.2. Formules de Boltzmann
En substituant, dans les formules de Boltzmann (4.20, 4.22) et (4.26, 4.27) lesexpressions (5.11) et (5.12) de J(t0, t) et R(t0, t) respectivement, on obtient les for-mules suivantes qui font intervenir la fonction de retard et la fonction de relaxationdu matériau et où l’on rappelle que t0 désigne l’instant de début des histoires σ et ε :
ε(t) = σ(t)f(0) +
∫ t
t0
σ(τ)f ′(t− τ) dτ(5.15a)
ou
ε(t) =
∫ ∞
−∞
σ(τ)f ′(t− τ)(intégrale de Stieltjes)(5.15b)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
40 Chapitre I – Approche unidimensionnelle
et
σ(t) = ε(t) r(0) +
∫ t
−∞
ε(τ) r′(t− τ) dτ(5.16a)
ou
σ(t) =
∫ ∞
−∞
ε(τ) r′(t− τ)(intégrale de Stieltjes) .(5.16b)
Dans les formules (5.15a et 5.16a) f ′ et r′ désignent les fonctions dérivées de fet r par rapport à leur argument ; dans (5.15b et 5.16b) (intégrales de Stieltjes) lesdérivées sont prises au sens des distributions (4.17) :
f ′ = f ′ + f(0) δ et r′ = r′ + r(0) δ .(5.17)
Sous l’une ou l’autre de leurs formes, les formules (5.15) et (5.16) permettentmaintenant d’identifier l’opérateur intégral de Boltzmann dès lors que l’on a affaire àun matériau non-vieillissant. On reconnaît en effet dans (5.15) le produit de convo-lution de Riemann de σ et de la dérivée f ′ de f , noté classiquement ∗ :
σF7−→ ε = J (×)σ = f ′ ∗ σ(5.18)
de même, pour (5.16) :
εR7−→σ = R (×) ε = r′ ∗ ε(5.19)
Les identités (4.31, 4.32) énoncées précédemment autour de l’opérateur de Boltz-mann sont classiques pour ces produits de convolution si l’on se rappelle que la dé-rivation d’un produit de convolution s’écrit typiquement : (f ∗ σ)′ = f ′ ∗ σ = f ∗ σ′.Ainsi :
ft0 = f ′ ∗ Yt0 = f ∗ (Yt0)′ = f ∗ δt0 ,
rt0 = r′ ∗ Yt0 = r ∗ (Yt0)′ = r ∗ δt0 .
(5.20)
Les identités (4.31) et (4.32) expriment que f ′ et r′ sont inverses du point de vuede la convolution de Riemann et l’on retrouve (4.35) :
r′ ∗ f = f ′ ∗ r = (f ∗ r)′ = Y ⇔ f ′ ∗ r′ = δ .(5.21)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
5 – Modèle linéaire non-vieillissant 41
On en déduit en particulier que(15) :
f(0) r(0) = 1(5.22)
ce qui n’est autre que l’expression, pour le matériau non-vieillissant, de la formuled’inversion entre le module élastique instantané et la complaisance élastique instan-tanée (4.13).
De plus, dans l’hypothèse où les fonctions de retard et de relaxation tendent cha-cune vers une limite finie quand t → ∞, notées respectivement f(∞) et r(∞), onpeut établir le résultat nouveau (16) :
f(∞) r(∞) = 1(5.23)
Ce résultat n’a rien de physiquement évident et il est, pour cela, remarquable : ilexprime une relation entre les « comportements à l’infini » en retard et en relaxation.Il fait apparaître r(∞) comme un « module à l’infini » dans l’expérience de relaxationet f(∞) comme une « complaisance à l’infini » dans l’expérience de déformationretardée, inverses l’un de l’autre.
Recouvrance et effacement
La formule (4.10) établie dans le cas général de la viscoélasticité linéaire pour laréponse dans l’expérience de recouvrance devient, en l’absence de vieillissement :
ε(t) = σ0[f(t− t0) − f(t− t1)] ;(5.24)
de même pour la réponse dans l’expérience d’effacement :
σ(t) = ε0[r(−t0) − r(t − t1)] .(5.25)
Il en résulte que, pour le matériau viscoélastique linéaire non-vieillissant :
si f(∞) est finie, la recouvrance est totale,si r(∞) est finie, l’effacement est total ,
ou encore, compte tenu de (5.22), si f(∞) ou r(∞) est finie non nulle la recouvranceet l’effacement sont totaux.
(15)La démonstration découle directement des expressions (5.17) de f ′ et r′ qui, transportées dans(5.20), montrent que f(0) r(0) δ = δ.(16)L’intégration de (5.20) donne directement : [f ∗ r](t) = t Y (t). En décomposant f et r sous laforme f(t) = f(∞)Y (t) + u(t) et r(t) = r(∞)Y (t) + ν(t), où u(t) et ν(t) sont des fonctions bornéesqui tendent vers 0 à l’infini, il vient t Y (t) = f(∞) r(∞) t Y (t)+ 3 termes complémentaires dont onpeut démontrer qu’ils sont infiniment petits par rapport à t.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
42 Chapitre I – Approche unidimensionnelle
5.3.3. Utilisation du calcul opérationnel
Il apparaît sur les formules précédentes que tous les calculs concernant le matériauviscoélastique linéaire non-vieillissant opèrent dans l’algèbre de la convolutionde Riemann. La transformation de Laplace fournit le moyen de leur substituer descalculs algébriques ordinaires effectués sur des transformées, fonctions de la variablep, inverse d’un temps.
Définition et propriétés élémentaires de la transformation de Laplace
En supposant satisfaites les hypothèses mathématiques nécessaires, la transforméede Laplace de la distribution ϕ(t) de support R
+, notée Lϕ, est la fonction de p définiepar :
Lϕ(p) =< ϕ, e−pt >=
∫ ∞
−∞
ϕ(t) e−pt dt .(5.26)
Dans les applications à venir, les distributions concernées seront définies par desfonctions, dérivables et continues, par morceaux, de support R
+ et par leurs dérivéesau sens des distributions (cf. (5.17)) : l’intégrale dans (5.25) est une intégrale deStieltjes.
Les propriétés essentielles sont résumées dans le tableau suivant(17)
L(a ∗ b) = L(a)L(b)
Lδ = 1
Lδ′ = p
Lϕ′ = L(ϕ ∗ δ′) = pLϕ
Lδu = e−pu
Lϕu = L(ϕ ∗ δu) = e−puLϕ
(5.27)
où ϕu désigne la translatée de ϕ(18)
Transformation de Laplace-Carson
On a vu par la formule (5.20) que f ′ et r′ sont inverses l’une de l’autre dans laconvolution de Riemann : f ′ ∗ r′ = δ. Ceci incite à utiliser la transformation dite de(Laplace-Carson), de la distribution ϕ, notée ϕ∗, qui est la transformée de Laplace dela dérivée de ϕ (au sens des distributions) :
(17)Pour ces distributions on a aussi :
L[tϕ(t)] = −d
dp(Lϕ), L[
ϕ(t)
t] =
∫
∞
p
Lϕ(u) du,
∫
∞
0
ϕ(t)
tdt =
∫
∞
0
Lϕ(p) dp.
(18)Cf. (5.19).

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
5 – Modèle linéaire non-vieillissant 43
ϕ∗ = Lϕ′ = pLϕ(5.28)
En conséquence de cette définition on a évidemment :
(a ∗ b′)∗ = a∗b∗ ;(5.29)
il s’ensuit que les formules (5.17), (5.18) et (5.20) s’écrivent simplement, en transfor-mées de Carson :
ε∗(p) = f∗(p)σ∗(p)
σ∗(p) = r∗(p) ε∗(p)
f∗(p) r∗(p) = 1
(5.30)
La fonction r∗(p) est souvent appelée module opérationnel .
Par ce moyen tous les calculs se trouvent ramenés à des calculs algébriquesordinaires portant sur les transformées de f, r, σ, ε, qui sont des fonctions de p.Comme on le verra par la suite (§ 9.4), l’intérêt essentiel de ce passage aux transfor-mées réside dans le fait que ces calculs sont identiques à ceux rencontrés en élasticitélinéaire, pour lesquels on peut donc utiliser les résultats déjà acquis. La difficultéest évidemment reportée sur le retour aux fonctions originales, fonctions de t, parinversion de la transformation de Carson(19).
Formulaire pratique de quelques transformées de Carson usuelles
ϕ∗(0) = ϕ(∞)
ϕ∗(∞) = ϕ(0) (20)(5.31)
(19)La structure formelle des calculs est évidemment identique dans l’algèbre de convolution et,disposant d’une bonne pratique du calcul dans cette algèbre, on peut y poursuivre les mêmes déve-loppements.(20)Où l’on suppose que ϕ(t) → ϕ(∞) quand t → ∞. Cf. les notes(15) et (16) du paragraphe (5.3.2).

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
44 Chapitre I – Approche unidimensionnelle
ϕ ϕ∗(p)
δ p
C Y (t) C
e−at Y (t)p
p+ a
tn Y (t)n!
pn
(1 − e−at)Y (t)a
p+ a
[ b
a− (1 −
b
a)e−at
]
Y (t)p+ b
p+ a
e−at Y (t) sin ωtp ω
(p+ a)2 + ω2
e−at Y (t) cos ωtp (p+ a)
(p+ a)2 + ω2
6 Modèles rhéologiques
L’emploi des modèles rhéologiques est un support de la pensée qui se révèlecommode dans la formulation des modèles de comportement uniaxial, notamment(mais cela n’est pas exclusif d’autres applications) en viscoélasticité linéaire pourle matériau non-vieillissant. L’avantage essentiel attaché à cette méthode est qu’ellepermet de concrétiser facilement l’intuition que l’on peut avoir de certains aspects ducomportement tout en étant assuré de respecter les principes de la thermodynamique.
Le paragraphe 6.1 présente les deux modèles élémentaires de base. On désigne defaçon générique par σ la force s’exerçant sur le modèle et par ε la variable conjuguéedans l’expression du travail de déformation de cet élément(21).
6.1 Modèles élémentaires
Les modèles rhéologiques utilisés en viscoélasticité linéaire pour le matériau nonvieillissant en calcul des structures sont constitués à partir des deux modèles élémen-taires représentés sur la Figure 7.
(21)En se référant à la représentation géométrique des modèles, on dira couramment que ε représentel’allongement du modèle.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
6 – Modèles rhéologiques 45
Eσ
ησ
Figure 7 – Modèles élémentaires viscoélastiques linéaires non-vieillissants
6.1.1 Élément élastique linéaire : ressort
On désigne par E la raideur de l’élément définie par la relation linéaire indépen-dante du temps :
σ(t) = E ε(t) .(6.1)
La fonction de retard est donc :
f(t) =1
EY (t) d’ou f∗(p) =
1
E(6.2)
et la fonction de relaxation
r(t) = E Y (t) d’ou r∗(p) = E(6.3)
On remarque que contrairement à un énoncé courant, les fonctions de retard etde relaxation correspondant à cet élément ne sont pas des constantes mais desfonctions « échelons ». L’oubli de cette remarque évidente est la cause d’erreurs assezfréquentes.
6.1.2. Élément visqueux linéaire : amortisseur
Cet élément porte aussi parfois le nom anglais de «dashpot », Son coefficient deviscosité est noté η défini par la relation linéaire indépendante du temps :
σ(t) = η ε′(t) .(6.4)
La fonction de retard est donc :
f(t) =t
ηY (t) d’où f∗(p) =
1
η p(6.5)
Pour la fonction de relaxation, on déduit de la formule précédente, par (5.29) :
r∗(p) = η p d’où r = η δ(6.6)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
46 Chapitre I – Approche unidimensionnelle
Ce résultat ne doit pas surprendre car, physiquement, on sait que cet élémentn’a pas d’élasticité instantanée : il est impossible d’imposer un saut instantanésur ε. En fait, dans les applications à venir, il ne sera jamais considéré seul : il seratoujours associé en série à un élément élastique linéaire en sorte que le comportementinstantané du modèle global sera élastique comme, à titre d’exemple, dans le modèlede Maxwell représenté sur la Figure 8.
À noter que pour l’élément visqueux linéaire, la recouvrance est partielle etqu’il n’y a pas d’expérience d’effacement.
6.2 Modèle de Maxwell
E ησ
Figure 8 – Modèle de Maxwell
Le modèle de Maxwell est composé d’un ressort et d’un amortisseur montés ensérie. La fonction de retard de ce modèle s’obtient en appliquant la règle évidente :
La fonction de retard d’un modèle constitué d’éléments montés en séries’obtient en additionnant les fonctions de retard de ces éléments.
Il vient ainsi :
f(t) =( 1
E+t
η
)
Y (t) et f∗(p) =1
E+
1
η p.(6.7)
Par (5.29) on obtient la transformée de la fonction de relaxation :
r∗(p) = Ep
p+E
η
,(6.8)
dont on déduit, par inversion de la transformée de Carson :
r(t) = E e−Eη
t Y (t) .(6.9)
Ainsi la fonction de relaxation décroit exponentiellement vers zéro, le temps ca-ractéristique du phénomène de relaxation étant :
τr =η
E.(6.10)
On voit que pour ce modèle on a :
• f(0) = 1/E et r(0) = E, ce qui exprime que le comportement instantané correspondà la seule contribution du ressort,

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
6 – Modèles rhéologiques 47
• f n’a pas de limite finie quand t → ∞ tandis que r(∞) = 0, en conséquence ducomportement de l’amortisseur qui se détend indéfiniment.
Il est intéressant de considérer les expériences de recouvrance et d’effacement : onconstate que la recouvrance est partielle tandis que l’effacement est total .
Cet élément viscoélastique linéaire simple est aussi appelé liquide de Maxwell .
6.3 Modèle de Kelvin
E
σ
η
Figure 9 – Modèle de Kelvin
Le modèle de Kelvin est composé d’un ressort et d’un amortisseur montés enparallèle. La fonction de relaxation de ce modèle s’obtient en appliquant la règleévidente :
La fonction de relaxation d’un modèle constitué d’éléments montés enparallèle s’obtient en additionnant les fonctions de relaxation
de ces éléments.
Il vient ainsi :
r∗(p) = E + η p et r = η δ + E Y .(6.11)
On constate que, comme au paragraphe 6.1.2, le modèle ne présente pas d’élasticitéinstantanée.
La transformée de Carson de la fonction de retard s’obtient par (5.29) et l’onprocède ensuite à son inversion :
f∗(p) =1
η
1
p+E
η
d’où f(t) =1
E(1 − e−
Eη
t)Y (t) .(6.12)
On voit que pour ce modèle on a :
• f(0) = 0, ce qui correspond à l’absence d’élasticité instantanée,
• f(∞) = 1/E et r(∞) = E, car au bout d’un temps infini, il n’y a plus d’effort dansl’amortisseur et le comportement est assuré par le ressort seul.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
48 Chapitre I – Approche unidimensionnelle
Le phénomène de retard est régi par une exponentielle dont le temps caractéris-tique est τf :
τf =η
E.(6.13)
Ce matériau n’ayant pas d’élasticité instantanée, l’expérience d’effacement ne peutêtre effectuée. En revanche on observe que la recouvrance est totale. Ce modèle estaussi appelé solide de Kelvin-Voigt .
6.4 Solide linéaire standard
Le solide linéaire standard est représenté par deux modèles équivalents : lesolide de Kelvin-Voigt à élasticité instantanée (Figure 10a) et le modèle de Zener(Figure 10b).
EE1
σ
η1
K
σ
η2E2
Figure 10 – Solide linéaire standard
6.4.1 Solide de Kelvin-Voigt à élasticité instantanée
Ce modèle est composé d’un ressort et d’un solide de Kelvin-Voigt montés en série(Figure 10a). On obtient ainsi rapidement la fonction de retard :
f(t) =[ 1
E+
1
E1(1 − e
−E1η1
t)]
Y (t) et f∗(p) =1
E+
1
E1 + η1p.(6.14)
La fonction de retard f(t) décroit exponentiellement de la valeur
f(0) =1
E(6.15)
à la valeur
f(∞) =1
E+
1
E1=
1
K.(6.16)
E apparaît ainsi comme le module d’élasticité instantané du modèle. La complai-sance à l’infini est 1/K où K, défini par (6.16), est égal à :
K =E E1
E + E1.(6.17)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
6 – Modèles rhéologiques 49
τf est le temps caractéristique en retard :
τf =η1E1
(6.18)
en sorte que f(t) s’écrit aussi :
f(t) =[ 1
K+ (
1
E−
1
K) e
− tτf )
]
Y (t) .(6.19)
Il vient ensuite par (5.29) :
r∗(p) = EE1 + η1p
E + E1 + η1pd’ou, par inversion, r(t) = [K + (E −K) e−
(E+E1)
η1t)]Y (t) .
(6.20)
On vérifie que r(0) = 1/f(0) = E, conformément à (5.21) et aussi que, le module àl’infini est r(∞) = K = 1/f(∞), comme annoncé par (5.22). La fonction de relaxationdécroit exponentiellement ; le temps caractéristique en relaxation est
τr =η1
E + E1(6.21)
d’où pour r(t) :
r(t) = [K + (E −K) e−t
τr )]Y (t) .(6.22)
On remarque que
τrτf
=K
E(6.23)
ce qui manifeste le fait que la relaxation des efforts est un phénomène plusrapide que la déformation retardée.
Enfin, on note que pour ce modèle la recouvrance est totale et l’effacementest total .
6.4.2. Modèle de Zener
Le modèle est représenté sur la Figure 10b. Il est constitué d’un ressort et d’unliquide de Maxwell montés en parallèle. On obtient ainsi rapidement sa fonction derelaxation :
r(t) = [K + E2e−
E2η2
t)]Y (t) .(6.24)
On remarque que, pour t = 0, r(0) = K + E2 et que, à l’infini, on a r(∞) = K.De plus la forme de (6.24) est identique à celle de (6.20). En fait les deux modèles dela Figure 10 sont équivalents en y identifiant les valeurs de K et en faisant :
K + E2 = E etη2E2
=η1
E + E1.(6.25)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
50 Chapitre I – Approche unidimensionnelle
6.4.3. Applications
Le solide linéaire standard est le modèle unidimensionnel le plus simple de com-portement viscoélastique linéaire, sans vieillissement, pour un matériau avec élasticitéinstantanée dont la recouvrance est totale et l’effacement total. Ce modèle peut êtrecaractérisée par son module d’élasticité instantanée E et ses temps caractéristiques enretard et en relaxation τf et τr avec τf > τr, qui permettent de déterminer le moduleà l’infini K.
Ce modèle a notamment été proposé dans certaines recommandations techniquespour la représentation du comportement différé du béton lorsque le chargement esteffectué suffisamment longtemps après la mise en œuvre pour que l’hypothèse denon-vieillissement puisse être considérée comme réaliste.
6.5 Généralisation
6.5.1. Modèle de Maxwell généralisé
Le solide linéaire standard est un cas particulier du modèle de Maxwell géné-ralisé qui est composé de m modèles de Maxwell assemblés en parallèle. Une brancheparallèle supplémentaire constituée simplement d’un ressort assure que la recouvranceest totale, ce qui correspond à un comportement « solide » (figure 11).
E
E1 η1
σE2 η2
Em ηm
Figure 11 – Modèle de Maxwell généralisé
La fonction de relaxation de ce modèle s’obtient en appliquant la règle énoncéeau paragraphe 6.3 à partir des fonctions de relaxation à partir des expressions (6.3)et (6.9) :
r(t) = E Y (t) +
j=m∑
j=1
(Eje−
Ej
ηjt)Y (t) .(6.26)
Cette formule met en évidence le spectre discret de temps caractéristiques en
relaxation [τr]j =ηj
Ej
.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
6 – Modèles rhéologiques 51
Le module d’élasticité instantané est égal à r(0) = E +j=m∑
j=1Ej tandis que
r(∞) = E : l’effacement est total et la recouvrance est totale.
Le module opérationnel est
r∗(p) = E +
j=m∑
j=1
(Ej
p
p+ 1/[τr]j) ,(6.27)
dont on déduit f∗(p) par l’inversion algébrique (5.29), puis f(t) par inversion de latransformée de Carson, mettant ainsi en évidence le spectre des temps caractéristiquesen retard.
6.5.2 Modèle de Kelvin généralisé
De la même façon le solide linéaire standard est un cas particulier du modèle deKelvin généralisé, qui est composé de n modèles de Kelvin assemblés en série avecun ressort qui apporte l’élasticité instantanée (figure 12).
EE1 E2 En
σ
ηnη2η1
Figure 12 – Modèle de Kelvin généralisé
Par la règle énoncée au paragraphe 6.2 et à partir de (6.2) et (6.12) on obtient lafonction de retard de ce modèle :
f(t) =1
EY (t) +
j=n∑
i=1
(1 − eEiηi
t)Y (t) .(6.28)
Le spectre discret des temps caractéristiques en retard est ici évident : [τf ]i =ηi
Ei
.
Le module élastique instantané est1
f(0)= E.
La complaisance à l’infini est f(∞) =1
E+
i=n∑
i=1
1
Ei
.
La recouvrance est totale et l’effacement est total.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
52 Chapitre I – Approche unidimensionnelle
En transformées de Carson :
f∗(p) =1
E+
i=n∑
i=1
1
Ei + ηip=
1
E+
i=n∑
i=1
Å
1
ηi
1
p+ 1/[τf ]i
ã
(6.29)
dont on déduit r∗(p) par l’inversion algébrique (5.29), puis r(t) par inversion de latransformée de Carson, mettant ainsi en évidence le spectre des temps caractéristiquesen relaxation.
6.5.3. Équivalences
Les inversions algébriques (fastidieuses) des transformées de Carson f∗(p) au pa-ragraphe 6.5.1 ou r∗(p) au paragraphe 6.5.2 mettent en évidence l’équivalence desdeux modèles des figures 11 et 12. On comprend que dans la pratique, selon le typede phénomène mis en jeu dans le problème étudié, on choisira de se référer à l’un oul’autre modèle pour faciliter les calculs.
Un théorème général permet en outre d’établir que tout assemblage en parallèleet/ou en série de ressorts et d’amortisseurs, dont la recouvrance est totale et dont lemodule d’élasticité instantané est fini, est équivalent à un modèle de Maxwell ou deKelvin généralisé.
Enfin, en généralisant les formules (6.26) ou (6.28) on peut introduire, au lieu desspectres discrets de temps caractéristiques en relaxation ou en retard, des spectrescontinus.
7 Comportement viscoélastique linéaireunidimensionnel
7.1 Point de vue uniaxial et modélisation unidimensionnelle
L’exemple choisi aux paragraphes 2.1 et 2.2 permet d’illustrer la différence entrel’analyse d’une expérience du point de vue uniaxial et une modélisation unidimen-sionnelle. En effet on a considéré une éprouvette tridimensionnelle, soumise d’abordà une expérience de retard sous une sollicitation de traction simple : du point de vuedu matériau constitutif il s’agit d’une sollicitation homogène en contrainte uniaxialequi s’écrit en notation tensorielle :
σ(t) = σ0ex ⊗ exYt0(t) .(7.1)
La réponse du matériau est évidemment tridimensionnelle mais on a choisi de neconsidérer que la déformation longitudinale, supposée homogène, εxx(t) = ε(t). C’estainsi que l’on a défini la fonction de retard en traction simple (2.4).
Pour la définition de la fonction de relaxation (2.8), on a imaginé l’expérience« duale » de la précédente, c’est-à-dire sur cette même éprouvette dans les mêmesconditions de traction simple, en imposant la seule composante εxx(t) = ε(t) =ε0(t)Yt0(t) de εxx(t) et en suivant la réponse σ(t), amplitude de σ(t) qui est uniaxial.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
7 – Comportement viscoélastique linéaire unidimensionnel 53
En fait, ce point de vue uniaxial ne décrit pas le comportement du matériauconstitutif de l’éprouvette (cf. chapitre II, section 1) mais celui de l’éprouvette elle-même, considérée comme un élément de structure soumis à des sollicitations detraction ou compression.
L’analyse développée dans les sections 3 à 5 fournit le prototype de toute loi decomportement viscoélastique linéaire unidimensionnelle, de la même façon que la loide Hooke, sous sa forme originale « Ut tensio sic vis », en élasticité.
De façon générique, on désigne par Q la variable « force » et par q la variable géo-métrique qui lui est associée dans l’expression du travail de déformation de l’élémentconcerné (contrainte et déformation généralisées unidimensionnelles). On introduitles fonctions de retard J(τ, t) et les fonctions de relaxation R(τ, t) avec les propriétéshomologues de (4.7 et 4.8) :
QF7−→q = − <
∂J
∂τ,Q >= J (×)Q,(7.2)
qR7−→Q = − <
∂R
∂τ,q >= R (×)q .(7.3)
Si le matériau est non-vieillissant, avec f et r pour la fonction de retard et lafonction de relaxation :
(7.4) QF7−→q = f ′ ∗ Q ⇔ q∗ = f∗Q∗
(7.5) qR7−→Q = r′ ∗ q ⇔ Q∗ = r∗q∗
avec :
f(τ) = 0 si τ < 0
f(0) > 0
f ′(τ) ≥ 0, f ′′(τ) ≤ 0 pour τ > 0
(7.6)
et
r(τ) = 0 si τ < 0
r(0) > 0
r′(τ) ≤ 0, r′′(τ) ≥ 0 pour τ > 0
(7.7)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
54 Chapitre I – Approche unidimensionnelle
7.2 Exemples d’applications à des éléments de structure
7.2.1 Poutre en traction-compression
N
Figure 13 – Élément de poutre en traction-compression
On se place ici dans le cadre de la modélisation des milieux curvilignes.
Pour l’élément de poutre droite, la variable « force » est l’effort normal habituel-lement noté N et la variable géométrique associée à N dans l’expression du travail dedéformation est la déformation longitudinale ε. D’où pour (7.3) :
Q = N, q = ε = J (×)N .(7.8)
Dans le cas particulier où la modélisation curviligne est celle d’un élément debarre tridimensionnel, de section S, constitué d’un matériau homogène isotrope dontla fonction de retard en traction simple est J(τ, t), on verra au chapitre II (§ 7.2) que :
ε = J (×)N
S.(7.9)
Autrement dit, la fonction de retard pour cet élément de poutre en traction-compression est :
J(τ, t) =J(τ, t)
S.(7.10)
7.2.2. Poutre en flexion
M
Figure 14 – Élément de poutre en flexion
On est encore dans le cadre de la modélisation des milieux curvilignes.
Pour l’élément de poutre droite, la variable « force » est maintenant le momentde flexion M et la variable géométrique associée à M dans l’expression du travail dedéformation est la courbure χ de la déformée de l’élément ; d’où pour (7.3) :
Q = M, q = χ = J (×)M .(7.11)
Dans le cas particulier où la modélisation curviligne est celle d’un élément debarre tridimensionnel, de section S, constitué d’un matériau homogène isotrope dont

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
7 – Comportement viscoélastique linéaire unidimensionnel 55
la fonction de retard en traction simple est J(τ, t), si la flexion est effectuée autourd’un axe principal d’inertie de la section droite, I désignant le moment d’inertie parrapport à cet axe principal, on verra au chapitre II (§ 7.3) que :
χ = J (×)M
I.(7.12)
Autrement dit, la fonction de retard pour l’élément de poutre en flexion est alors :
J(τ, t) =J(τ, t)
I.(7.13)
7.2.3. Poutre en torsion
C
x
Figure 15 – Élément de poutre en torsion
On se place encore dans le cadre de la modélisation des milieux curvilignes.
Pour l’élément de poutre droite, la variable « force » est maintenant le momentde torsion C et la variable géométrique associée à C dans l’expression du travailde déformation est α, rotation différentielle de l’élément autour de l’axe x ; d’oùpour (7.3) :
Q = C, q = α = J (×)C .(7.14)
Dans le cas particulier où la modélisation curviligne est celle d’un élément debarre tridimensionnel, de section S, constitué d’un matériau homogène isotrope dontla fonction de retard en cisaillement simple est γ(τ, t), en désignant par J le momentd’inertie de torsion de la section droite, on verra au chapitre II (§ 7.4) que :
α = γ (×)C
J.(7.15)
Autrement dit, la fonction de retard pour l’élément de poutre en torsion est :
J(τ, t) =γ(τ, t)
J.(7.16)
7.2.4. Poutre sous sollicitations « complexes »
La linéarité de la loi de comportement permet d’utiliser les résultats précédentspour traiter le cas où l’élément de poutre droite est soumis à une sollicitation com-portant à la fois la traction-compression et la flexion selon un axe qui n’est pas unaxe principal d’inertie. En effet, il suffit, comme en élasticité linéaire, d’appliquer leprincipe de superposition (§ 3.1).
Comme en Résistance des matériaux , les formules (7.8), (7.11) et (7.14) sontaussi utilisées comme lois de comportement de l’élément infinitésimal de poutrecourbe (arc de faible courbure).

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
56 Chapitre I – Approche unidimensionnelle
8 Comportement sous sollicitation harmonique.Module complexe
8.1 Essai harmonique
En appliquant une sollicitation sinusoïdale dont la pulsation est suffisammentfaible pour que les effets d’inertie demeurent négligeables on réalise un essai har-monique qui permet de mettre en évidence et de caractériser les conséquences pra-tiques de l’irréversibilité du comportement viscoélastique. On se place ici dans le casdu comportement viscoélastique linéaire unidimensionnel sans vieillissement avec lesnotations définies en (7.4) et (7.5).
La sollicitation est imposée sur la variable « déplacement » :
q(t) = q0 cos ωt Y (t)(8.1)
qu’il est commode de mettre sous la forme
q(t) = q0 Re[eiωt Y (t)] .(8.2)
La réponse à cette sollicitation, c’est-à-dire la « force » Q(t) se déduit de (7.5) :
qR7−→Q = r′ ∗ q .(8.3)
d’où, avec (8.2)
Q(t) = q0 Re[r′ ∗ eiω(.)]Y (t)(8.4)
qui s’explicite en :
Q(t) = q0 Re[∫ ∞
−∞
r′(τ) eiω(t−τ) Y (t− τ) dτ ] .(8.5)
8.2 Régime harmonique asymptotique
La réponse (8.5) est nulle pour t < 0 en conséquence de (7.7).
Pour t ≥ 0, on décompose (8.5) sous la forme :
Q(t) = q0 Re[eiωt
∫ ∞
−∞
r′(τ) e−iωtdτ ] − q0 Re[eiωt
∫ ∞
t
r′(τ) e−iωτ dτ ],(8.6)
qui permet de faire apparaitre au second membre la valeur de la transformée de Carsonr∗ pour p = iω :
Q(t) = q0 Re[eiωtr∗(iω)] − q0 Re[eiωt
∫ ∞
t
r′(τ) e−iωτ dτ ] .(8.7)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
8 – Comportement sous sollicitation harmonique. Module complexe 57
Au total la réponse (8.5) s’écrit, ∀t :
Q(t) = q0 Re[eiωtr∗(iω)]Y (t) − q0 Re[eiωt
∫ ∞
t
r′(τ) e−iωτ dτ ]Y (t)(8.8)
On y distingue un premier terme qui représente une réponse harmonique, auquels’ajoute le terme complémentaire −q0 Re[eiωt
∫ ∞
tr′(τ)e−iωτ dτ ]Y (t) qui tend vers
zéro lorsque t→ ∞ si l’effacement est total(22). Il en résulte alors que la réponse tendvers le régime harmonique asymptotique :
Q(t) = q0 Re[eiωtr∗(iω)] .(8.9)
On dit alors qu’il y a accommodation pour signifier que, dans le diagrammesollicitation-réponse, la représentation [Q(t),q(t)] du comportement tend vers uncycle fermé (ellipse).
Pour expliciter (8.9) on décompose le module complexe r∗(iω) en module etargument M(ω) > 0 et δ(ω) :
r∗(iω) = M(ω) eiδ(ω) .(8.10)
La détermination de M(ω) et δ(ω) nécessite d’expliciter les parties réelle et ima-ginaire de r∗(iω), soit :
Re[r∗(iω)] =
∫ ∞
−∞
r′(τ) cosωτ dτ et Im [r∗(iω)] = −
∫ ∞
−∞
r′(τ) sinωτ dτ .(8.11)
Ces deux quantités sont positives. En effet, on peut écrire :
Im[r∗(iω)] =
∫ πω
0
[r′(τ +π
ω) − r′(τ)] sinωτ dτ +
∫ 3πω
2πω
[r′(τ +π
ω) − r′(τ)] sinωτ dτ + etc.
(8.12)
dont chaque terme du deuxième membre est positif en conséquence de (7.7) ; et aussi :
Re[r∗(iω)] = r(0) +
∫ π2ω
0
r′(τ) cosωτ dτ +
∫ ∞
π2ω
r′(τ) cosωτ dτ(8.13)
où la somme des deux premiers termes du deuxième membre est bornée inférieurementpar r(∞) et où le dernier terme est positif par le même raisonnement que pour (8.12).
On en déduit que
0 ≤ δ(ω) <π
2(8.14)
(22)On rappelle que r(τ) est de signe constant ; en conséquence∣
∣
∣
∫
∞
tr′(τ) e−iωτdτ
∣
∣
∣est bornée par
|r(∞) − r(t)|.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
58 Chapitre I – Approche unidimensionnelle
Ainsi :
Q(t) = q0M(ω) cos [ωt+ δ(ω)](8.15)
définit le régime harmonique asymptotique dans lequel Q(t) est déphasé par rapport àq(t) : l’encadrement (8.14) montre que la force est en avance sur le déplacement .
Fonction de ω, le déphasage δ(ω) tend vers zéro quand ω → 0, tandis que M(ω) →r(∞). Également, quand ω → ∞, δ(ω) tend vers zéro et M(ω) → r(0) .
Le déphasage δ(ω) est aussi appelé angle de perte en raison de sa relation avec ladissipation d’énergie due à l’irréversibilité du comportement. Sur un cycle du régimeharmonique asymptotique l’énergie dissipée est égale à
∆W =
∫ 2πω
0
Q(τ)q′(τ) dτ(8.16)
soit, compte tenu de (8.15) et tous calculs faits :
∆W = (q0)2M(ω)π sin δ(ω) .(8.17)
On introduit alors l’énergie élastique moyennée sur un cycle
W =2π
ω
∫ 2πω
0
1
2Q(τ)q(τ) dτ(8.18)
soit, par (8.15),
W =1
4(q0)2M(ω) sin δ(ω) ,(8.19)
pour définir le coefficient de frottement intérieur f par f = ∆W/2W , d’où :
f =∆W
2W= 2π tan δ(ω)(8.20)
8.3 Exemple : sollicitation harmonique du solide linéairestandard
Pour illustrer de façon explicite les résultats précédents, on étudie le comporte-ment, sous sollicitation harmonique, du solide linéaire standard (§ 6.4) dont la fonctionde relaxation (6.22) s’écrit d’après (6.21 et 6.23), en introduisant le module instantanéE et les temps caractéristiques en retard et en relaxation τf et τr :
r(t) = E[ τrτf
+ (1 −τrτf
)e−t
τr
]
Y (t) d’où r∗(p) = Eτrτf
+ E(1 −τrτf
)p
p+ 1/τr.(8.21)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
8 – Comportement sous sollicitation harmonique. Module complexe 59
La sollicitation est :
ε(t) = ε0 cos ωt Y (t) .(8.22)
La réponse s’obtient directement soit en utilisant les transformées de Carson, soitpar intégration de (8.4) qui s’écrit ici :
σ(t) = ε0 Re[r′ ∗ eiω(.)Y ](t) .(8.23)
Il vient ainsi :
ε(t) = ε0 Re[
Eτrτf
+ E(1 −τrτf
)iω
iω + 1/τreiωt
]
Y (t)(8.24)
+ ε0 Re[
E(1
τr−
1
τf)
1
iω + 1/τre−
tτr
]
Y (t)
où l’on reconnaît les deux termes de (8.8) : régime harmonique asymptotique et termetransitoire évanescent quand t→ ∞.
E
M(ω)
ω
K tan δ(ω)
ω√
1/τrτf
Figure 16 – Module et argument du module complexe
On calcule le module et l’argument du module complexe r∗(iω) qui sont représentéssur la figure 16 :
M(ω) = E
√
ω2 + (1/τf )2√
ω2 + (1/τr)2(8.25)
et
tan δ(ω) = ω1/τr − 1/τfω2 + 1/τrτf
avec 0 ≤ δ(ω) <π
2.(8.26)
Conformément aux résultats généraux énoncés plus haut, on constate que le mo-
dule M(ω) croît de façon monotone depuis la valeur K = Eτrτf
= r(∞) jusqu’à la
valeur E = r(0) quand ω croît de zéro à l’infini. Dans le même temps, le déphasagecroît depuis zéro jusqu’à son maximum atteint pour ω =
√
1/τrτf puis décroît jusqu’àzéro. Pour les applications pratiques on met ainsi en évidence la plage de fréquences

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
60 Chapitre I – Approche unidimensionnelle
la plus favorable pour bénéficier des propriétés d’amortissement du matériau ; corré-lativement, l’énergie dissipée sous forme de chaleur doit être maitrisée afin de limiterl’augmentation de température qui pourrait en résulter et modifier les caractéristiquesviscoélastiques du matériau.
8.4 Commentaire
Si la sollicitation harmonique est imposée sur la « force » l’analyse de la réponsepeut être menée de manière identique. Elle conduit aux mêmes résultats : mêmerégime harmonique asymptotique, même retard du déplacement sur la force, mêmemodule.
9 Problèmes d’évolutions quasi-statiquesen viscoélasticité linéaire unidimensionelle
9.1 Problématique
Les problèmes étudiés, dans l’hypothèse des petites perturbations, concernentdes structures ou des systèmes mécaniques constitués d’éléments pour lesquels lesefforts intérieurs et les déformations associées sont unidimensionnels. Ils se posentcomme en Élasticité ou en Résistance des matériaux classiques. Le système d’équationstypique correspondant comprend, du point de vue des variables spatiales, les équationsde champ et les conditions aux limites.(23) Les données qui interviennent dans ceséquations sont des fonctions du temps qui décrivent l’histoire de la sollicitation dusystème étudié : elles concernent les forces de masse ou de volume et les efforts et lesdéplacements sur des parties complémentaires du contour. La 1oi de comportement,sous la forme (7.2) ou (7.3), fait explicitement intervenir la variable temps.
Dans la définition de ces problèmes d’évolution il est essentiel d’identifier defaçon précise la nature des données (sollicitations) et leurs histoires. La diffé-rence entre les expériences de retard et de relaxation illustre parfaitement commentla confusion entre sollicitation et réponse, qui parait parfois sans conséquence dans lecadre de l’élasticité linéaire, conduit à un contresens grave en ce qui concerne laréponse différée. Dans la pratique, les sollicitations du système étudié sont plus com-plexes que dans cet exemple trop simple et l’équivoque s’installe ainsi plus facilement.L’histoire de la sollicitation est souvent morcelée dans le temps, par exemple entrel’époque de la construction et de l’assemblage des éléments du système et l’époque del’exploitation qui lui fait suite. Un aspect important de la nécessité d’une détectionprécise du type de phénomène mécanique mis en jeu apparaît avec la différence destemps caractéristiques en retard et en relaxation signalée à propos du solide linéairestandard et qui est une caractéristique générale : on conçoit qu’une erreur de "diag-nostic" peut avoir des conséquences graves sur l’estimation de la durée de vie d’unouvrage de génie civil par exemple (cf. § 11.3.2).
(23)On rappelle que, compte tenu du cadre d’hypothèses choisi, ces équations sont écrites sur laconfiguration initiale sans recours aux notations lagrangiennes.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
9 – Problèmes d’évolutions quasi-statiques 61
9.2 Principe de superposition
Dans l’hypothèse des petites perturbations, la linéarité du comportement du ma-tériau implique la linéarité du problème d’évolution. Cela signifie que la réponse dusystème étudié dépend linéairement de l’histoire de la sollicitation.
C’est le principe de superposition (cf. chapitre II 6.4). On prendra soin devalider les hypothèses nécessaires tout au long de l’évolution.
9.3 Résolution
La résolution du problème d’évolution viscoélastique présente évidemment 1esdifficultés du problème d’élasticité ou de Résistance des matériaux homologue, quisont accrues par le caractère fonctionnel de la loi de comportement. Dans certainescirconstances, les identités et les formules d’inversion énoncées autour de l’opérateurde Boltzmann (§ 4.4) permettent de ramener la résolution du problème d’évolutionviscoélastique linéaire à celle du problème d’élasticité linéaire homologue.
9.3.1. Évolution prescrite par des paramètres de chargement
On considère le cas où les données qui définissent l’histoire de la sollicitation dusystème sont de la forme suivante :
• déplacements donnés aux limites nuls
• forces de masse et efforts donnés aux limites qui dépendent linéairement de nparamètres de chargement Qj(t), composantes du vecteur chargement Q(t).
On désigne par qj(t) les paramètres cinématiques associés aux Qj(t) dans l’expres-sion du travail de tous les efforts extérieurs appliqués au système. Le vecteur q(t) estle vecteur cinématique.
On désigne désormais par σ, ε les champs d’efforts intérieurs et de déformationsunidimensionnels de l’élément constitutif du système étudié (Q et q des sections 7 et8) ; le champ de déplacement est noté ξ. On décrit la réponse élastique instantanéedu système à l’instant t0 sous le chargement Q(t0)
(24)
σ(x, t0) = σélj (x, t0)Qj(t0)
ε(x, t0) = εél
j (x, t0)Qj(t0)
ξ(x, t0) = ξél
j(x, t0)Qj(t0)
(9.1)
et qui correspond au paramètre cinématique
q(t0) = qél
j(t0)Qj(t0) = Λ(t0).Q(t0),(9.2)
où Λ(t0) est la matrice symétrique de complaisance élastique instantanée du systèmeà l’instant t0.
(24)Ces notations seront reprises, mutatis mutandis, au chapitre II (section 6) ; on fait la conventionimplicite de sommation sur les indices répétés.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
62 Chapitre I – Approche unidimensionnelle
Si le système est constitué d’un matériau homogène dont la fonction de retardest J(τ, t), on vérifie sans difficulté que les fonctions σél
j , εélj , ξél
jet qél
jsont de la
forme :
σél
j (x, t0) = σél
j (x)
εél
j (x, t0) = εélj (x)Jt0(t0)
ξél
j(x, t0) = ξél
j(x)Jt0(t0)
qél
j(t0) = qél
jJt0(t0)
(9.3)
et la solution du problème d’évolution défini par l’histoire du vecteur chargement Q(t)est donnée à chaque instant par :
σ(x, t) = σél
j (x)Qj(t)
ε(x, t) = εélj (x)[ J (×)Qj ](t)
ξ(x, t) = ξélj(x)[ J (×)Qj ](t) .
(9.4)
En effet, compte tenu de la dépendance linéaire des données sur les efforts vis-à-vis des paramètres Qj(t), le champ σ de (9.4) satisfait évidemment les équationsd’équilibre et les conditions aux limites tandis que les champs ε et ξ sont, à chaqueinstant, géométriquement compatibles avec les données aux limites nulles sur les dé-placements : c’est l’application du principe de superposition comme au paragraphe4.3.1. Il en résulte :
q(t) =1
Jt0(t0)Λ(t0).[ J (×)Q ](t) = Rt0(t0)Λ(t0).[ J (×)Q ](t)(9.5)
Ainsi, sous les hypothèses indiquées, la solution du problème d’évolution viscoélas-tique du système est explicitement obtenue à partir de la connaissance de la réponseélastique instantanée, à travers l’opérateur intégral.
9.3.2. Évolution prescrite par des paramètres cinématiques
De la même façon, on considère maintenant le cas où les données qui définissentl’histoire de la sollicitation du système sont de la forme suivante :
• déplacements donnés aux limites qui dépendent linéairement de m para-mètres cinématiques qk(t) , composantes du vecteur cinématique q(t) .
• forces de masse et efforts donnés aux limites nulles
On désigne par Qk(t) les paramètres de chargement associés aux qk(t) dans l’ex-pression du travail de tous les efforts extérieurs appliqués au système. Le vecteur Q(t)est le vecteur chargement.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
9 – Problèmes d’évolutions quasi-statiques 63
Avec les mêmes notations typiques que dans (9.1 et 9.2), on décrit la réponseélastique instantanée du système à l’instant t0 sous la sollicitation q(t0) :
σ(x, t0) = σél
k (x, t0) qk(t0)
ε(x, t0) = εél
k (x, t0) qk(t0)
ξ(x, t0) = ξél
k(x, t0) qk(t0)
(9.6)
et qui correspond au paramètre de chargement
Q(t0) = Qél
k(t0) qk(t0) = A(t0).q(t0),(9.7)
où A(t0) est la matrice symétrique de module élastique instantané du système à
l’instant t0.
Avec la même hypothèse d’homogénéité du système et en désignant par R(τ, t)la fonction de relaxation du matériau constitutif, σél
k , εél
k , ξél
ket Qél
ksont de la forme :
σél
k (x, t0) = σél
k (x)Rt0(t0)
εél
k (x, t0) = εélk (x)
ξél
k(x, t0) = ξél
k(x)
Qél
k(t0) = Qél
kRt0(t0)
(9.8)
et la solution du problème d’évolution défini par l’histoire du vecteur cinématique q(t)est donnée par l’application du principe de superposition :
σ(x, t) = σél
k (x)[R (×) qk ](t)
ε(x, t) = εélk (x) qk(t)
ξ(x, t) = ξélk(x) qk(t)
(9.9)
et
Q(t) =1
Rt0(t0)A(t0).[R (×) q ](t) = Jt0(t0)A(t0).[R (×) q ](t)(9.10)
qui explicitent, sous les hypothèses indiquées, l’évolution viscoélastique du systèmeà partir de la connaissance de la réponse élastique instantanée, à travers l’opérateurintégral.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
64 Chapitre I – Approche unidimensionnelle
Il est à noter que si les paramètres de chargement au paragraphe 9.3.1 sont lesparamètres associés aux paramètres cinématiques ci-dessus, les équations (9.5) et(9.10) sont tout simplement inverses l’une de l’autre.
9.3.3. Applications pratiques
Pour les problèmes rencontrés dans la pratique, il est fréquent que l’histoire dessollicitations soit composée d’épisodes successifs d’évolutions prescrites par des pa-ramètres de chargement et d’évolutions prescrites par des paramètres cinématiques.Par application du principe de superposition, si l’hypothèse d’homogénéité du sys-tème est satisfaite, les résultats des paragraphes précédents ramènent formellementla résolution du problème d’évolution viscoélastique à celle du problème d’élasticitéinstantanée.
9.4 Théorème de correspondance
9.4.1. Idée directrice
On se place désormais hors de l’hypothèse d’homogénéité du matériau consti-tutif adoptée dans la section précédente.
On a vu qu’en absence de vieillissement l’utilisation de la transformation deLaplace-Carson ramène la loi de comportement viscoélastique linéaire à une simpleéquation algébrique, identique à une équation de comportement élastique linéaire(5.29) pour les transformées. L’idée de l’analyse qui conduit au théorème de corres-pondance consiste à appliquer la transformation de Carson à toutes les équationsqui définissent le problème d’évolution.
Compte tenu de l’hypothèse des petites perturbations, les domaines géométriquessur lesquels sont écrites les équations de la statique et les conditions aux limites duproblème sont invariables dans le temps. Il en résulte qu’en appliquant la transforma-tion de Carson à ces équations, on n’a à se préoccuper que des fonctions qui dépendentexplicitement du temps : ce sont les champs donnés et les champs inconnus, dont lestransformées sont des fonctions de x et de p. Les équations de la statique et les condi-tios aux limites du problème sont ainsi transformées en des équations algébriquesformellement identiques pour les transformées.
Au total, le système complet des équations en transformées de Carson des équa-tions du problème est formellement identique à un problème d’équilibre élastiquelinéaire portant sur les transformées des champs donnés et inconnus avec la loi decomportement élastique (5.29) écrite pour les transformées. Si la solution explicite dece problème d’équilibre élastique linéaire homologue du problème d’évolutionest connue il suffit d’appliquer les formules correspondantes aux transformées pourobtenir explicitement la transformée de la solution du problème original d’évolutionviscoélastique. Il ne reste plus alors qu’à inverser la transformation de Laplace-Carsonpour obtenir la solution cherchée.
Ce résultat est connu sous le nom de Théorème de correspondance de Lee-Mandel. On y reviendra plus en détails au chapitre II (§ 6.6).

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
9 – Problèmes d’évolutions quasi-statiques 65
Il est particulièrement intéressant ici de considérer les cas, fréquents dans la pra-tique, des évolutions prescrites par des paramètres de chargement ou par des para-mètres cinématiques.
9.4.2. Évolution prescrite par des paramètres de chargement
Lorsque l’évolution est prescrite par des paramètres de chargement, le problèmed’équilibre élastique homologue n’est autre que le problème d’élasticité instantanée.L’application du théorème de correspondance s’exprime par le schéma suivant :
Équilibre élastique ⇒ Évolution viscoélastique
(9.11)
σ(x = σélj (x, 0)Qj
ε(x) = εél
j (x, 0)Qj
ξ(x) = ξél
j(x, 0)Qj
⇒
σ∗(x, p) = [ σélj ]∗(x, p)Q∗
j(p)
ε∗(x, p) = [ εél
j ]∗(x, p)Q∗j (p)
ξ∗(x, p) = [ ξél
j]∗(x, p)Q∗
j (p)
(9.12) q = Λ(0).Q(t0) ⇒ q∗(p) = [Λ ]∗(p).Q∗(p)
Dans ce schéma, les champs σél
j (x, 0), εél
j (x, 0) et ξél
j(x, 0) ainsi que Λ(0) décrivent
les réponses élastiques instantanées élémentaires. Les champs [ σél
j ]∗(x, p), [ εél
j ]∗(x, p)
et [ ξél
j]∗(x, p) ainsi que [Λ ]∗(p) symbolisent les expressions explicites de
σélj (x, 0), εél
j (x, 0), ξél
j(x, 0) et Λ(0) écrites avec la loi de comportement (5.29).
La solution à l’infini en résulte par application de (5.31) :
σ(x,∞) = [ σél
j ]∗(x, 0)Qj(∞)
ε(x,∞) = [ εél
j ]∗(x, 0)Qj(∞)
ξ(x,∞) = [ ξél
j]∗(x, 0)Qj(∞)
(9.13)
q(∞) = [Λ ]∗(0).Q(∞) .(9.14)
9.4.3. Évolution prescrite par des paramètres cinématiques
De la même façon, pour une évolution prescrite par des paramètres cinématiques,l’application du théorème de correspondance s’explicite sous la forme :

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
66 Chapitre I – Approche unidimensionnelle
Équilibre élastique ⇒ Évolution viscoélastique
(9.15)
σ(x) = σél
k (x, 0) qk
ε(x) = εél
k (x, 0) qk)
ξ(x) = ξél
k(x, 0) qk
⇒
σ∗(x, p) = [ σél
k ]∗(x, p) q∗k(p)
ε∗(x, p) = [ εél
k ]∗(x, p) q∗k(p)
ξ∗(x, p) = [ ξél
k] ∗(x, p) q∗k(p)
(9.16) Q) = A(0).q ⇒ Q∗(p) = [A ]∗(p).q∗(p)
avec la solution à l’infini obtenue par application de (5.31)
σ(x,∞) = [ σél
k ]∗(x, 0) qk(∞)
ε(x,∞) = [ εél
k ]∗(x, 0) qk(∞)
ξ(x,∞) = [ ξél
k]∗(x, 0) qk(∞) .
(9.17)
Q(∞) = [A ]∗(0).q(∞) .(9.18)
9.4.4. Commentaires
On vérifie sans peine que, dans le cas d’un système homogène on retrouve bienpar passage aux originales les résultats établis dans la section 9.3 particularisés icipar l’absence de vieillissement.
Le caractère opératoire systématique du théorème de correspondance peut inciter,lorsque les hypothèses nécessaires sont satisfaites, à se borner à poser le problèmed’élasticité instantané initial, à appliquer les schémas (9.11 et 9.12) ou (9.15 et 9.16)et à procéder aux calculs algébriques correspondants sans plus réfléchir à la naturemécanique des phénomènes mis en jeu au cours de l’évolution. Il est néanmoins tou-jours recommandable de poser complètement le problème d’évolution en fonction desvariables (x, t) : ceci permet d’éviter qu’une erreur d’interprétation sur la nature dessollicitations, sans conséquence apparente au niveau de la réponse élastique initiale,n’aboutisse à un contresens physique pour le problème d’évolution.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
10 – Précontrainte élastique et viscoélasticité 67
Exemples de mise en œuvre
10 Précontrainte élastique et viscoélasticité
10.1 Définition du problème
Le système étudié est le modèle rhéologique représenté sur la figure 17. Il estconstitué d’un élément 1 linéaire élastique de module d’élasticité E et d’un élément 2
viscoélastique linéaire dont les fonctions de retard et de relaxation sont respectivementJ(τ, t) et R(τ, t). Ces deux éléments sont assemblés en parallèle à l’instant t0. Lacontrainte dans l’élément 1 est alors :
σ1(t0) = σ0(10.1)
et la contrainte dans l’élément 2 est
σ2(t0) = −σ0 .(10.2)
Le système est ainsi précontraint à l’instant t0.
E1
σ
R(τ, t)J(τ, t)
Figure 17 – Précontrainte d’un élément viscoélastique
Par rapport à l’état naturel (sous contrainte nulle) de l’élément 1, la déformationest
ε1(t0) =σ0
E1(10.3)
et pour l’élément 2, par rapport à son état naturel :
ε2(t0) = −σ0J(t0, t0) = −σ0 1
R(t0, t0).(10.4)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
68 Chapitre I – Approche unidimensionnelle
10.2 Solution du problème d’évolution
Sans chargement extérieur pour t > t0 les contraintes σ1(t) et σ2(t) dans leséléments du système vont évoluer en raison du comportement différé de l’élément 2.Les équations de ce problème d’évolution sont :
• La condition d’autocontrainte du système
σ1(t) + σ2(t) = σ(t) = 0 pour t ≥ t0(10.5)
• La condition de liaison qui exprime que les déformations des deux éléments, àpartir de l’instant t0, sont égales :
ε1(t) − ε1(t0) = ε2(t) − ε2(t0) pour t ≥ t0 .(10.6)
Compte tenu des comportements des éléments 1 et 2 on déduit de (10.6) :
1
E1[σ1(t) − σ0 Yt0(t)] = [J (×)σ2](t) + σ0 J(t0, t0)(10.7)
d’où, compte tenu de (10.5),
[
J +1
E1Yt0
]
(×)σ2 = −σ0[
J(t0, t0) +1
R1Yt0
]
.(10.8)
Cette équation met en évidence la fonction de retard relative à σ2 pour le modèle,soit :
J(t0, t) = J(t0, t) +1
E1Yt0(t) .(10.9)
en désignant par R(t0, t) la fonction de relaxation correspondante définie par
R (×)Jt0 = Yt0 ,(10.10)
on déduit de (10.8) l’évolution de la contrainte σ2(t) :
σ2(t) = −σ0R(t0, t)
R(t0, t0).(10.11)
10.3 Application pratique
Du point de vue pratique, le système unidimensionnel de la figure 17 est uneschématisation de nombreux exemples de précontrainte d’un élément viscoélastiquepar un élément élastique, tel que celui représenté sur la figure 18 : un bloc de béton,dont le comportement est modélisé comme viscoélastique linéaire, est précontraint encompression entre deux plaques indéformables au moyen d’une tige en acier élastiquemise en tension et ancrée sur les deux plaques.
En se reportant à la figure 17, la tige élastique est représentée par l’élément 1
et le bloc de béton par l’élément 2. L’équation (10.11) donne l’évolution de la pré-contrainte dans le bloc de béton : cette évolution est semblable à une « relaxation »

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
10 – Précontrainte élastique et viscoélasticité 69
Figure 18 – Précontrainte en compression
mais la fonction de relaxation qui y intervient n’est pas celle du béton mais R(t0, t)définie par (10.10) : c’est l’inverse au sens de l’opérateur intégral (×) de la sommedes fonctions de retard du béton 2 et de l’acier 1. Ainsi, du point de vue de laprécontrainte, ces deux éléments fonctionnent en série.
À titre d’exemple, si l’élément 2 est un solide linéaire standard dont la fonctionde retard est :
f2(t) =[ 1
K+
Å
1
E−
1
K
ã
e− t
τf
]
Y (t)(10.12)
la fonction de retard J(t0, t) de (10.9) s’écrit :
J(t0, t) = f(t− t0) = f(τ) =[ 1
K+
1
E1+
Å
1
E−
1
K
ã
e− τ
τf
]
Y (τ)(10.13)
soit
f(τ) =[ 1
K+
Å
1
E−
1
K
ã
e− τ
τf
]
Y (τ)(10.14)
avec
K =KE1
K + E1et E =
EE1
E + E1.(10.15)
La fonction de relaxation correspondante R(t0, t) définie par (10.10) est alors :
R(t0, t) = r(t− t0) = r(τ) = [K + (E − K) e−τ
Tr ]Y (τ)(10.16)
où le temps caractéristique de relaxation est
Tr = τfKE
= τrE + E1
K + E1(10.17)
supérieur à celui du béton.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
70 Chapitre I – Approche unidimensionnelle
L’évolution de la précontrainte dans le béton est ainsi, en application de (10.11) :
σ2(t) = −σ0
E
[
K + (E− K)e−t−t0Tr ]Yt0(t) .(10.18)
On y reconnaît la relaxation d’un solide linéaire standard, dont le temps caracté-
ristique de relaxation est Tr, depuis σ2(t0) = −σ0 jusqu’à la valeur σ2(∞) = −σ0 KE
.
11 Étude d’une structure
11.1 Présentation
L’objet de cette section est de présenter, sur une structure extrêmement simplequelques aspects de la prise en compte du comportement différé du matériau consti-tutif sur le comportement d’un système. La structure étudiée est représentée sur lafigure 19. Il s’agit d’une poutre console OA encastrée en O, de longueur ` = 2a.
y
` = 2a
xAO
Figure 19 – Poutre console
Sous les chargements envisagés la poutre console n’est soumise qu’à des effets deflexion. La loi de comportement de l’élément de poutre est donnée, en chaque point dela poutre, par (7.11) où l’on désigne par χ(x) la courbure de la déformée à l’abscissex et par M(x) le moment fléchissant. ν(x) est le déplacement selon Oy.
χ(x) = J(x)(×)M(x) .(11.1)
Dans la suite, on examinera successivement le cas de la poutre homogène soumiseà divers types d’histoires de sollicitation et, pour une poutre hétérogène, quelqueseffets de l’hétérogénéité.
11.2 Poutre homogène isostatique
11.2.1. Charge uniformément répartie
Ainsi que cela est représenté symboliquement sur la figure 20, la poutre est soumiseà une charge uniformément répartie sur OA de densité −p(t) selon Oy. Les conditionsaux limites sont l’encastrement parfait en O et l’extrémité libre en A.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
11 – Étude d’une structure 71
y
` = 2a
xAO
p(t)
Figure 20 – Poutre console sous charge uniformément répartie
Il s’agit donc d’une histoire de sollicitation définie par un paramètre de chargementunique Q(t), auquel est associé le paramètre cinématique q(t) :
Q(t) = p(t)
q(t) =∫
OA−ν(x, t) dx .
(11.2)
La résolution procède directement du paragraphe 9.3.1. On part de la solutionélastique instantanée, sous la forme (9.1, 9.3), qui s’écrit ici :
M(x, t0) = M él(x, t0) p(t0) = −(`− x)2
2p(t0)
χ(x, t0) = X él(x, t0) p(t0) = −(`− x)2
2Jt0(t0) p(t0)
ν(x, t0) = V él(x, t0) p(t0) = −x2
2
Å
`2
2−`x
3+x2
12
ã
Jt0(t0) p(t0) .
(11.3)
On en déduit immédiatement, sans calculs, la solution du problème d’évolutionsous la forme (9.4) :
M(x, t) = −(`− x)2
2p(t)
χ(x, t) = −(`− x)2
2[J (×) p](t)
ν(x, t) = −x2
2
Å
`2
2−`x
3+x2
12
ã
[J (×) p ](t) .
(11.4)
En particulier le déplacement vertical à l’extrémité A est égal à :
ν(`, t) = −`4
8[J (×) p ](t) .(11.5)
Ces formules décrivent notamment la déformation retardée ou « fluage » de laconsole sous l’effet de son poids propre p(t) = p Yt0(t) après décoffrage ou décintre-ment :

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
72 Chapitre I – Approche unidimensionnelle
M(x, t) = −(`− x)2
2p Yt0(t)
ν(x, t) = −x2
2
Å
`2
2−`x
3+x2
12
ã
pJt0(t)
ν(`, t) = −p`4
8pJt0(t) .
(11.6)
11.2.2. Charge concentrée
Ainsi que cela est représenté symboliquement sur la figure 21, la poutre est soumiseà une charge concentrée dirigée selon Oy, appliquée en A, d’intensité F (t). L’autrecondition aux limites est l’encastrement parfait en O
y
` = 2a
xAF (t)
O
Figure 21 – Poutre console sous charge concentrée
La sollicitation est définie par le paramètre de chargement Q(t), auquel est associéle paramètre cinématique q(t) :
®
Q(t) = F (t)
q(t) = ν(`, t) .(11.7)
Sans qu’il soit nécessaire de reprendre explicitement les raisonnements précédents,on obtient la solution de ce problème d’évolution à partir de la solution du problèmed’élasticité instantanée :
M(x, t) = (`− x)F (t)
ν(x, t) =1
6x2(3`− x)[J (×)F ](t)
q(t) = ν(`, t) =`3
3[J (×)F ](t)
(11.8)
d’où, par inversion :
F (t) =3
`3[R (×) q ](t),(11.9)
où R(τ, t) est la fonction inverse de J(τ, t) au sens de l’opérateur de Boltzmann :
∀t0,R (×)Jt0 = Yt0 .(11.10)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
11 – Étude d’une structure 73
11.3 Poutre homogène hyperstatique
11.3.1. État initial naturel
Les conditions aux limites de la poutre sont l’encastrement en O et l’appui bilatéralen A (figure 22). La poutre est soumise à une charge uniformément répartie sur OAde densité −p(t) selon Oy.
y
` = 2a
p(t)
xAO
Figure 22 – Poutre hyperstatique
Le paramètre de chargement et le paramètre cinématique associé sont encore dé-finis par (11.7). Il s’agit à nouveau d’une évolution prescrite par un paramètre dechargement, dont la solution se déduit de celle du problème d’élasticité instantanée.En désignant par H(t) la réaction verticale hyperstatique en A :
M(x, t) = −(`− x)(` − 4x)
8p(t)
ν(x, t)− = −x2(`− x)(3` − 2x)
48[J (×) p ](t)
H(t) =3`
8p(t) .
(11.11)
On remarque que ce résultat s’obtient aussi, directement, à partir des deux casde charge de la poutre isostatique étudiés précédemment, de la même façon qu’enélasticité. Il suffit en effet de déterminer la valeur de la réaction hyperstatique H(t)en écrivant que le déplacement du point A est constamment nul en raison de la liaisond’appui ; ainsi, par (11.5) et (11.8) :
ν(`, t) = −`4
8[J (×) p ](t) +
`3
3[J (×)H ](t) = 0 .(11.12)
11.3.2. État initial précontraint par dénivellation d’appui
En élasticité linéaire et en Résistance des matériaux, dans l’hypothèse des petitesperturbations, la notion d’état initial précontraint ne présente pas de difficulté : l’étatinitial d’efforts intérieurs autoéquilibrés fait partie des données du problème et il suffitensuite d’appliquer le principe de superposition .
Il n’y a, en apparence, rien à changer à cette description lorsque, dans le mêmecadre de l’hypothèse des petites perturbations, le comportement de l’élément de

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
74 Chapitre I – Approche unidimensionnelle
poutre est viscoélastique linéaire. En fait, l’introduction du comportement différédu matériau nécessite que la description de la précontrainte soit précisée. L’état pré-contraint est, en effet, mis en place en imposant, à un instant donné, à des élémentsconstitutifs de la structure, des déformations géométriquement incompatibles,dont la compatibilité est assurée par un champ d’efforts intérieurs autoéquilibréset qui sont ensuite maintenues. Il apparaît ainsi, qu’à la différence des exemples dechargement actifs étudiés plus haut pour lesquels l’évolution est décrite par l’histoirede paramètres de chargement, l’évolution de la précontrainte relève de la descriptionpar l’histoire de paramètres cinématiques.
On se propose d’envisager ce type de problème sur l’exemple simple de la poutreconsole de la figure 23 où la précontrainte est imposée par une dénivellation de l’appuià l’extrémité A.
y
` = 2a
p(t)νA
xAO
Figure 23 – Poutre hyperstatique précontrainte par dénivellation d’appui
On suppose ici que la précontrainte est obtenue en imposant à l’instant t0 une dé-nivellation verticale de l’appui A, d’amplitude νA qui est ensuite maintenue constante.Le problème d’évolution ainsi défini, indépendamment du chargement actif qui seraintroduit dans la suite, est décrit par l’histoire du paramètre cinématique ν(`, t) auquelest associé le paramètre de chargement H(t), réaction d’appui en A :
ν(`, t) = νA Yt0(t) .(11.13)
On peut évidemment effectuer la résolution de ce problème comme indiqué auparagraphe 9.3.2. Il est plus simple de se reporter au paragraphe 11.2.2 ci-dessus.L’équation (11.9) détermine l’évolution de la réaction d’appui due à la dénivellation :
H(t) =3
`3νA[R (×)Yt0 ](t) =
3
`3νA Rt0(t),(11.14)
la distribution du moment fléchissant(25)
M(x, t) =3
`3(`− x) νA Rt0(t)(11.15)
et la déformée de la poutre
ν(x, t) =x2(3`− x)
2`3νA Yt0(t) .(11.16)
(25)Cette distribution est autoéquilibrée du point de vue du système constitué par la poutre et sonappui en A.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
11 – Étude d’une structure 75
Cet exemple confirme le résultat annoncé au paragraphe 9.3.2 : la déformée dela poutre due à la précontrainte est invariable à partir de t0 tandis que la réactiond’appui et la distribution du moment fléchissant de précontrainte décroissent commela fonction de relaxation du matériau.
En conséquence, pour la structure soumise au chargement actif du paragraphe11.3.1, on obtient en application du principe de superposition à partir de (11.11) et(11.14 à 11.16) :
M(x, t) = −(`− x)(` − 4x)
8p(t) +
3
`3(`− x) νA Rt0(t)
ν(x, t) = −x2(`− x)(3` − 2x)
48[J (×) p ](t) +
x2(3`− x)
2`3νA Yt0(t)
H(t) =3`
8p(t) +
3
`3νARt0(t) .
(11.17)
Ce résultat fait apparaître la superposition du phénomène « de type fluage » liéau chargement actif et du phénomène de relaxation lié à la précontrainte.
Les effets de la conjugaison de ces deux phénomènes sont particulièrement évidentsdans le cas d’une structure compensée sous poids propre. Dans ce cas, la densitép(t) représente le poids propre linéique appliqué à l’instant t0 du décoffrage ou dudécintrement :
p(t) = p Yt0 (t) .(11.18)
La précontrainte est réglée à l’instant t0 de façon à ce que le moment d’encas-trement en O soit nul, ce qui implique un moment fléchissant positif dans toute lastructure à cet instant. La dénivellation d’appui correspondante résulte de (11.17) etelle est maintenue constante pour t ≥ t0 :
νA(t) =`4
24Rt0(t0)p Yt0(t) .(11.19)
On déduit de (11.17) l’évolution de la réaction d’appui :
H(t) =3p`
8Yt0(t) +
p`
8
Rt0(t)
Rt0(t0).(11.20)
Le deuxième terme de (11.20) représente la réaction compensatrice due à ladénivellation d’appui. Elle décroît proportionnellement à la fonction de relaxation dumatériau. Le diagramme du moment fléchissant dans la poutre est donné par :
M(x, t) = −p(`− x)(` − 4x)
8Yt0(t) + p
`(`− x)
8
Rt0(t)
Rt0(t0).(11.21)
En conséquence le moment d’encastrement en O, initialement nul, devient négatifet suit la fonction de relaxation jusqu’à sa valeur « à l’infini » :
M(0,∞) = −p`2
8
Å
1 −Rt0(∞)
Rt0(t0)
ã
.(11.22)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
76 Chapitre I – Approche unidimensionnelle
Dans les sections voisines de l’encastrement, le moment de flexion change de signeau cours de temps : ces « inversions de flexion » peuvent être dangereuses si ellesn’ont pas été prévues au projet.
Ces phénomènes expriment la redistribution des efforts due à la déformationdifférée du matériau dans une structure précontrainte (figure 24).
M(x)
t = t0
xAO
M(x)
t→ ∞
xO A
Figure 24 – Diagrammes du moment fléchissant à la mise en charge et quand t → ∞
Le suivi de l’évolution de la valeur de la réaction compensatrice est le moyenpratique d’évaluer la précontrainte effective dans la structure à un instant donné ; ils’effectue par « pesée ». Lorsque la précontrainte tend à devenir insuffisante, on pro-cède à une dénivellation d’appui complémentaire. Une autre façon évidente d’aborderle problème pour éviter les inversions de flexion consiste à calculer la dénivellationd’appui en se fondant sur le comportement à l’infini du matériau :
νA(t) =`4
24Rt0(∞)p Yt0(t) .(11.23)
11.4 Poutre hétérogène
11.4.1 Description de la structure étudiée
On reprend la structure hyperstatique du paragraphe 11.3.1 ci-dessus, sollicitée àpartir de l’état naturel (pas de précontrainte). Afin de mettre en évidence des effetsde l’hétérogénéité on considère le cas (d’école) où la poutre est constituée de deuxtronçons homogènes de longueur a solidarisés en B . On peut imaginer par exemple,comme cela sera étudié dans la suite (§ 11.4.3), deux éléments constitués du mêmematériau physique mais d’âges différents.
Les éléments constitutifs de chacun des tronçons sont viscoélastiques linéaires et,dans une chronologie commune – même origine des temps – on désigne respec-tivement par J1(τ, t) et J2(τ, t) leurs fonctions de retard dans l’équation (7.11) duparagraphe 7.2.2.
Le processus de chargement est représenté par la charge uniformément répartie dedensité linéique −p(t) selon Oy appliquée à l’instant t0 sur les deux tronçons de la

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
11 – Étude d’une structure 77
PSfrag
y
a
` = 2 a
a
p(t)
xABO
Figure 25 – Poutre hétérogène hyperstatique
poutre OA et maintenue constante pour t ≥ t0 : ceci modélise par exemple le poids(11.18) de la poutre appliqué à l’instant du décintrement, la poutre étant alors dansson état naturel (pas de précontrainte).
11.4.2. Résolution du problème d’évolution
Comme au paragraphe 11.3.1, la résolution du problème se ramène à la détermi-nation de l’évolution de la réaction hyperstatique H(t) en A, qui fournit ensuite ladistribution du moment fléchissant M(x, t) et la déformée ν(x, t) pour t ≥ t0. On peutsuivre le raisonnement suivant.
• Distribution du moment fléchissant sur OA
M(x, t) = −p Yt0(t)(2a− x)2
2+H(t) (2a− x) .(11.24)
• Déformée du tronçon OB
Avec la loi de comportement
χ(x, t) =d2ν
dx2(x, t) = [J1 (×)M ](x, t) ;(11.25)
par intégration, compte tenu de l’encastrement, il vient :
ν(x, t) = p
Å
−(2a− x)4
24−
4
3a3x+
2
3a4
ã
J1t0
(t)(11.26)
+
Å
(2a− x)3
6+ 2a2x−
4
3a3
ã
[J1 (×)H ](t) .
• Déformée du tronçon BA
La loi de comportement s’écrit :
χ(x, t) =d2ν
dx2(x, t) = [J2 (×)M ](x, t) ;(11.27)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
78 Chapitre I – Approche unidimensionnelle
l’intégration, avec la condition d’appui en A, donne
ν(x, t) = −p(2a− x)4
24J2
t0(t) + p
(2a− x)3
6[J2 (×)H ](t) − (2a− x)[J2 (×)C ](t) .
(11.28)
où C(τ) est une fonction du temps déterminée, en même temps que H(t), par lacondition de raccord continu des deux tronçons en B.
• Détermination de la réaction d’appui en A
Après des calculs fastidieux, on obtient ainsi l’évolution de la réaction d’appui enA. Celle-ci est la solution de l’équation fonctionnelle :
[ (7J1 + J2) (×)H ] =3 pa
8(15J1
t0+ J2
t0),(11.29)
qu’il n’est pas possible d’expliciter dans le cas général.
11.4.3. Commentaire
Évolution de la réaction d’appui
Sans qu’il soit nécessaire de disposer de sa solution explicite l’équation fonction-nelle (11.29) met en évidence la différence essentielle introduite par l’hétérogénéité dela structure : la réaction d’appui H(t) et donc la distribution de moment fléchissantne sont désormais plus constantes pour t ≥ t0 : dans le cas général, il y a redistribu-tion des efforts. Si les fonctions J1(τ, t) et J2(τ, t) sont proportionnelles les effortsdemeurent constants. Cette condition est évidemment suffisante d’après (11.29) ; elleest également nécessaire comme on le voit en faisant H(t) = H Yt0(t) dans (11.29) :on obtient
J2t0
(t) = −56H − 45 pa
8H − 3 paJ1
t0(t), ∀t ≥ t0,(11.30)
qui démontre la condition de proportionnalité et détermine la valeur constante de laréaction d’appui si cette condition est satisfaite.
Effet des différences d’âge
On s’intéresse ici au cas évoqué plus haut où les deux tronçons de la poutre sontconstitués du même matériau physique mais dont l’âge est différent dans OBet BA.
En désignant par J(τ, t) la fonction de retard de ce matériau physique dans sachronologie propre, c’est-à-dire par rapport à sa propre origine des temps, les fonctionsde retard J1
t0(t) et J2
t0(t) dans une chronologie commune unique s’écrivent :
J1t0
(t) = J(t0 − t1, t− t1)
J2t0
(t) = J(t0 − t1, t− t2)(11.31)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
11 – Étude d’une structure 79
On voit alors que :
• Si le matériau est non-vieillissant , les deux fonctions J1t0
(t) et J2t0
(t) sontégales. La condition de proportionnalité est satisfaite. Il n’y a pas de redistributiondes efforts due à l’hétérogénéité. Ce résultat est banal car la poutre est, de fait,homogène.
• Si l’on adopte, pour la prise en compte du vieillissement du matériau, la formetrès simple de fonction de retard(26) :
Jt0(t) =1
E(t0)f(t− t0)Yt0(t)(11.32)
où le vieillissement n’intervient qu’à travers le facteur multiplicatif1
E(t0), la condition
de proportionnalité est encore satisfaite et il n’y a pas, dans ce cas, de redistributiondes efforts due à la différence d’âge.
(26)Cette forme est parfois adoptée pour la modélisation du comportement viscoélastique du bétonen compression.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
80 Chapitre I – Approche unidimensionnelle
Récapitulatif des formules essentielles
• Expérience de Retard
σ(t) = σ0Yt0(t)
Viscoélasticité linéaire :
ε(t) = σ0J(t0, t)
Viscoélasticité linéaire sans vieillissement :
ε(t) = σ0 f(t− t0)
• Expérience de Relaxation
ε(t) = ε0Yt0(t)
Viscoélasticité linéaire :
σ(t) = ε0R(t0, t)
Viscoélasticité linéaire sans vieillissement :
σ(t) = ε0 r(t− t0)
• Expérience de Recouvrance
σ(t) = σ0[Yt0(t) − Yt1(t)]
Viscoélasticité linéaire :
ε(t) = σ0[J(t0, t) − J(t1, t)]
Viscoélasticité linéaire sans vieillissement :
ε(t) = σ0[f(t− t0) − f(t− t1)]

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Récapitulatif des formules essentielles 81
• Expérience d’Effacement
ε(t) = ε0[Yt0(t) − Yt1(t)]
Viscoélasticité linéaire :
σ(t) = ε0[R(t0, t) −R(t1, t)]
Viscoélasticité linéaire sans vieillissement :
σ(t) = ε0[r(t− t0) − r(t − t1)]
• Viscoélasticité linéaire
Formules de Boltzmann :
∂J
∂τ(·, t) =
ß
∂J
∂τ(·, t)
™
− J(t, t) δt∂R
∂τ(·, t) =
ß
∂R
∂τ(·, t)
™
−R(t, t) δt
ε(t) = σ(t)J(t, t) −
∫ t
t0
σ(τ)∂J
∂τ(τ, t) dτ ⇔ ε(t) = −
∫ t
t0
σ(τ)∂J
∂τ(τ, t) dτ
σ(t) = ε(t)R(t, t) −
∫ t
t0
ε(τ)∂R
∂τ(τ, t) dτ ⇔ σ(t) = −
∫ t
t0
ε(τ)∂R
∂τ(τ, t) dτ
σF7−→ ε = − <
∂J
∂τ, σ >= J (×)σ
εR7−→σ = − <
∂R
∂τ, ε >= R (×) ε
J(τ, τ)R(τ, τ) = 1, ∀τ
Jt0 = J (×)Yt0
Rt0 = R (×)Yt0
R (×)Jt0 = Yt0
J (×)Rt0 = Yt0
<∂R
∂τ,∂J
∂τ0>=<
∂J
∂τ,∂R
∂τ0>= δt0

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
82 Chapitre I – Approche unidimensionnelle
• Viscoélasticité linéaire sans vieillissement
Formules de Boltzmann :
f ′ = f ′ + f(0) δ r′ = r′ + r(0) δ
ε(t) = σ(t)f(0) +
∫ t
t0
σ(τ)f ′(t− τ) dτ ⇔ ε(t) =
∫ ∞
−∞
σ(τ)f ′(t− τ) dτ
σ(t) = ε(t)r(0) +
∫ t
∞
ε(τ)r′(t− τ) dτ ⇔ σ(t) =
∫ ∞
−∞
ε(τ)r′(t− τ) dτ
σF7−→ ε = f ′ ∗ σ
εR7−→σ = r′ ∗ ε
ft0 = f ′ ∗ Yt0 = f ∗ (Yt0)′ = f ∗ δt0
rt0 = r′ ∗ Yt0 = r ∗ (Yt0)′ = r ∗ δt0
r′ ∗ f = f ′ ∗ r = (f ∗ r)′ = Y ⇔ f ′ ∗ r′ = δ
f(0) r(0) = 1
f(∞) r(∞) = 1
• Transformation de Laplace
Lϕ(p) = 〈ϕ, e−pt〉 =
∫ ∞
−∞
ϕ(t) e−pt dt
L(a ∗ b) = L(a)L(b)
Lδ = 1
Lδ′ = p
Lϕ′ = L(ϕ ∗ δ′) = pLϕ
Lδu = e−pu
Lϕu = L(ϕ ∗ δu) = e−puLϕ

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Récapitulatif des formules essentielles 83
• Transformation de Carson
ϕ∗ = Lϕ′ = pLϕ
ε∗(p) = f∗(p)σ∗(p)
σ∗(p) = r∗(p) ε∗(p)
f∗(p) r∗(p) = 1
ϕ ϕ∗(p)
δ p
C Y (t) C
e−at Y (t)p
p+ a
tn Y (t)n!
pn
(1 − e−at)Y (t)a
p+ a
[ b
a− (1 −
b
a)e−at
]
Y (t)p+ b
p+ a
e−at Y (t) sin ωtp ω
(p+ a)2 + ω2
e−at Y (t) cos ωtp(p+ a)
(p+ a)2 + ω2
ϕ∗(0) = ϕ(∞)
ϕ∗(∞) = ϕ(0)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
84 Chapitre I – Approche unidimensionnelle
• Solide linéaire standard
f(t) =[ 1
K+
Å
1
E−
1
K
ã
e− t
τf
]
Y (t)
r(t) = [K + (E −K)e−t
τr
]
Y (t)
τrτf
=K
E
• Modélisation unidimensionnelle
Viscoélasticité linéaire :
QF7−→q = − <
∂J
∂τ,Q >= J (×)Q
qR7−→Q = − <
∂R
∂τ,q >= R (×)q
Viscoélasticité linéaire sans vieillissement :
QF7−→q = f ′ ∗ Q ⇔ q∗ = f∗Q∗
qR7−→Q = r′ ∗ q ⇔ Q∗ = r∗q∗
Élément de poutre en traction-compression :
ε = J (×)N = J (×)N
S
Élément de poutre en flexion :
χ = J (×)M = J (×)M
I
Élément de poutre en torsion :
α = J (×)C = J (×)C
J

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Récapitulatif des formules essentielles 85
• Essai harmonique
Sollicitation
q(t) = q0 cosωt Y (t)
Réponse
Q(t) = q0Re[eiωtr∗(iω)]Y (t) − q0Re[eiωt
∫ ∞
t
r′(τ)e−iωτ dτ ]Y (t)
Régime harmonique asymptotique
Q(t) = q0Re[eiωtr∗(iω)]
Module complexe
r∗ = M(ω) eiδ(ω)
• Problème d’évolution
Paramètres de chargement
σ(x, t0) = σél
j (x, t0)Qj(t0)
ε(x, t0) = εél
j (x, t0)Qj(t0)
ξ(x, t0) = ξél
j(x, t0)Qj(t0)
q(t0) = qél
j(t0)Qj(t0) = Λ(t0).Q(t0)
système homogène
σél
j (x, t0) = σél
j (x)
εél
j (x, t0) = εélj (x)Jt0(t0)
ξél
j(x, t0) = ξél
j(x)Jt0(t0)
qél
j(t0) = qél
jJt0(t0)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
86 Chapitre I – Approche unidimensionnelle
σ(x, t) = σélj (x)Qj(t)
ε(x, t) = εélj (x[ J (×)Qj ](t)
ξ(x, t) = ξélj(x)[ J (×)Qj ](t)
q(t) = Rt0(t0)Λ(t0).[ J (×)Q ](t)
Paramètres cinématiques
σ(x, t0) = σél
k (x, t0) qk(t0)
ε(x, t0) = εél
k (x, t0) qk(t0)
ξ(x, t0) = ξél
k(x, t0) qk(t0)
Q(t0) = Qél
k(t0) qk(t0) = A(t0).q(t0),
système homogène
σél
k (x, t0) = σél
k (x)Rt0(t0)
εél
k (x, t0) = εélk (x)
ξél
k(x, t0) = ξél
k(x)
Qél
k(t0) = Qél
kRt0(t0)
σ(x, t) = σél
k (x)[R (×) qk ](t)
ε(x, t) = εélk (x) qk(t)
ξ(x, t) = ξélk(x) qk(t)
Q(t) =1
Rt0(t0)A(t0).[R (×) q ](t)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Récapitulatif des formules essentielles 87
• Théorème de correspondance
Évolution prescrite par des paramètres de chargement
σ(x) = σélj (x, 0)Qj
ε(x) = εél
j (x, 0)Qj
ξ(x) = ξél
j(x, 0)Qj
⇒
σ∗(x, p) = [ σélj ]∗(x, p)Q∗
j (p)
ε∗(x, p) = [ εél
j ]∗(x, p)Q∗j (p)
ξ∗(x, p) = [ ξél
j]∗(x, p)Q∗
j(p)
q = Λ(0).Q ⇒ q∗(p) = [Λ ]∗(p).Q∗(p)
σ(x,∞) = [ σélj ]∗(x, 0)Qj(∞)
ε(x,∞) = [ εélj ]∗(x, 0)Qj(∞)
ξ(x,∞) = [ ξél
j]∗(x, 0)Qj(∞)
q(∞) = [Λ ]∗(0).Q(∞)
Évolution prescrite par des paramètres cinématiques
σ(x) = σél
k (x, 0) qk
ε(x) = εél
k (x, 0) qk
ξ(x) = ξél
k(x, 0) qk
⇒
σ∗(x, p) = [ σél
k ]∗(x, p) q∗k(p)
ε∗(x, p) = [ εél
k ]∗(x, p) q∗k(p)
ξ∗(x, p) = [ ξél
k]∗(x, p) q∗k(p)
Q = A(0).q ⇒ Q∗(p) = [A ]∗(p).q∗(p)
σ(x,∞) = [ σél
k ]∗(x, 0) qk(∞)
ε(x,∞) = [ εél
k ]∗(x, 0) qk(∞)
ξ(x,∞) = [ ξél
k]∗(x, 0) qk(∞)
Q(∞) = [A ]∗(0).q(∞)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Chapitre II
Viscoélasticité linéaire
tridimensionnelle
Comportement viscoélastique linéaire tridimensionnel
Exemples de mise en œuvre
89

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Chapitre II – Viscoélasticité linéaire tridimensionnelle 91
En bref...
Dans l’hypothèse de la linéarité du comportement, les expériences deretard et de relaxation généralisées au cadre tridimensionnel conduisent àdéfinir les tenseurs de retard et de relaxation, fonctions de l’instant initialde la sollicitation et du temps. Les symétries de ces tenseurs résultent decelles des tenseurs des contraintes et des déformations. Pour une histoirede sollicitation quelconque la réponse du matériau s’exprime au moyen desformules de Boltzmann qui font intervenir le même opérateur intégral quedans le cas unidimensionnel (sections 1 à 3).
Les symétries matérielles du matériau isotrope apportent une simpli-fication considérable aux expressions précédentes. Le comportement estalors défini uniquement par deux fonctions de retard ou deux fonctionsde relaxation. Par l’expérience de retard en traction simple on fait appa-raître la fonction de retard en traction simple et le coefficient de Poissondans cette expérience, fonctions de l’instant initial de la sollicitation et dutemps. Par les expériences de relaxation on met en évidence des fonctionsde relaxation homologues des constantes de Lamé en élasticité linéaireisotrope, dont la fonction de relaxation en cisaillement simple (sections 4).
Bien qu’elle ne soit pas une authentique expérience de relaxation dupoint de vue tridimensionnel, l’expérience de « relaxation » en tractionsimple introduit la fonction de « relaxation » en traction simple et le co-efficient de Poisson en « relaxation » en traction simple ; ces fonctions,évidemment liées aux précédentes, conduisent à des expressions particu-lièrement intéressantes des formules de Boltzmann (section 4).
Lorsque le coefficient de Poisson dans l’expérience de retard en trac-tion simple est indépendant du temps, constamment égal au coefficient dePoisson de la réponse élastique instantanée, le coefficient de Poisson enrelaxation en traction simple lui est égal ; le comportement viscoélastiquedu matériau n’est plus défini que par une seule fonction : la fonction deretard ou la fonction de « relaxation » en traction simple (section 4).
En l’absence de vieillissement les formules de Boltzmann s’explicitentau moyen du produit de convolution de Riemann comme dans le cas unidi-mensionnel. L’utilisation du calcul opérationnel conduit à des expressionsalgébriques formellement identiques aux équations de comportement del’élasticité linéaire, paramétrées en p. (section 5).

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
92 Chapitre II – Viscoélasticité linéaire tridimensionnelle
La définition des évolutions viscoélastiques quasi-statiques se place dansl’hypothèse des petites perturbations et fait l’hypothèse que les évolutionssont suffisamment lentes pour que les équations de la statique puissent êtresubstituées aux équations de la dynamique. On fait de plus l’hypothèsequ’au cours de l’histoire de sollicitation la nature des données aux limitesdemeure inchangée. À titre de résultat général on établit le principe desuperposition qui exprime la linéarité du problème (section 6).
Dans le cas particulier d’un système constitué d’un matériau homogèneet isotrope à coefficient de Poisson constant on établit que, pour une his-toire de sollicitation prescrite par des paramètres de chargement (resp.paramètres cinématiques), la réponse en contraintes (resp. en déforma-tions et déplacements) évolue à partir de la réponse instantanée initialeproportionnellement à ces paramètres tandis que la réponse en déforma-tions et déplacements (resp. en contraintes) suit la formule de Boltzmanncorrespondante (section 6).
Lorsque le système est constitué d’un matériau non-vieillissant, la trans-formée de Laplace-Carson de la solution du problème d’évolution s’exprimepar les mêmes formules algébriques que la réponse élastique instantanée.On en déduit directement le comportement à l’infini du système. La so-lution explicite du problème d’évolution est obtenue par inversion de latransformée de Laplace-Carson. C’est le Théorème de correspondance deLee-Mandel (section 6).
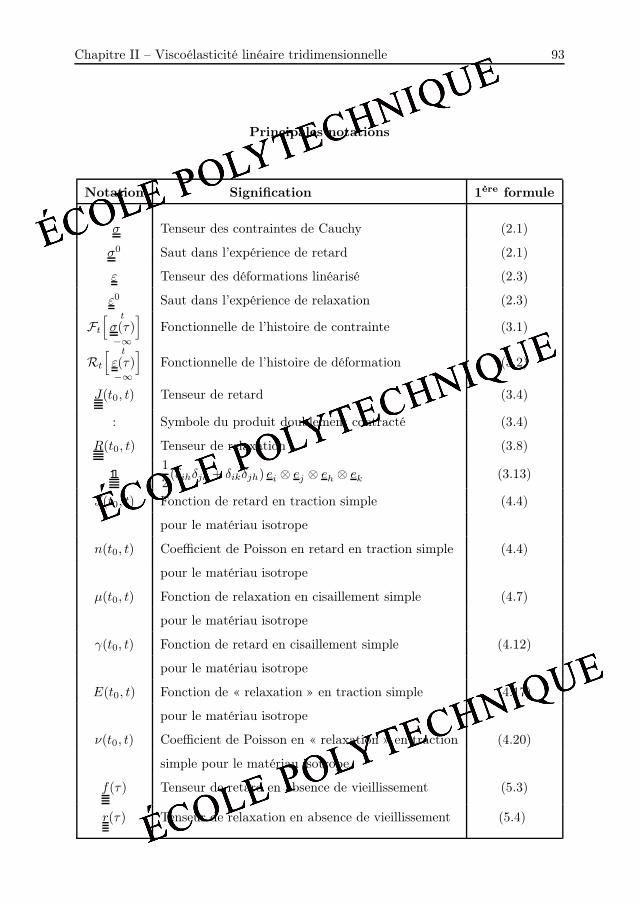
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Chapitre II – Viscoélasticité linéaire tridimensionnelle 93
Principales notations
Notation Signification 1ère formule
σ Tenseur des contraintes de Cauchy (2.1)
σ0 Saut dans l’expérience de retard (2.1)
ε Tenseur des déformations linéarisé (2.3)
ε0 Saut dans l’expérience de relaxation (2.3)
Ft
[ t
σ(τ)−∞
]
Fonctionnelle de l’histoire de contrainte (3.1)
Rt
[ t
ε(τ)−∞
]
Fonctionnelle de l’histoire de déformation (3.2)
J(t0, t) Tenseur de retard (3.4)
: Symbole du produit doublement contracté (3.4)
R(t0, t) Tenseur de relaxation (3.8)
1l1
2(δihδjk + δikδjh) ei ⊗ ej ⊗ eh ⊗ ek (3.13)
J(t0, t) Fonction de retard en traction simple (4.4)
pour le matériau isotrope
n(t0, t) Coefficient de Poisson en retard en traction simple (4.4)
pour le matériau isotrope
µ(t0, t) Fonction de relaxation en cisaillement simple (4.7)
pour le matériau isotrope
γ(t0, t) Fonction de retard en cisaillement simple (4.12)
pour le matériau isotrope
E(t0, t) Fonction de « relaxation » en traction simple (4.17)
pour le matériau isotrope
ν(t0, t) Coefficient de Poisson en « relaxation » en traction (4.20)
simple pour le matériau isotrope
f(τ) Tenseur de retard en absence de vieillissement (5.3)
r(τ) Tenseur de relaxation en absence de vieillissement (5.4)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
94 Chapitre II – Viscoélasticité linéaire tridimensionnelle
Principales notations
Notation Signification 1ère formule
[Fe(t)] Torseur des efforts extérieurs (6.1)
SξiSurface où ξi est donnée (6.3)
ξdi (x, t) Donnée sur Sξi(6.3)
STiSurface où Ti est donnée (6.3)
T di (x, t) Donnée sur STi
(6.3)
Q Vecteur chargement (6.14)
Qj Paramètre de chargement (6.15)
qj Paramètre cinématique (6.16)
q Vecteur cinématique (6.16)
σél
jεél
j, Solutions élémentaires pour Jt0(t0) = 1 (6.15) (6.16)
ξélj,qél
jet Qj(t0) = 1
Λ(t0) Matrice de complaisance élastique instantanée (6.17)
σél
kεélk, Solutions élémentaires pour Et0(t0) = 1 (6.23)
ξélk, Qél
ket qk(t0) = 1
A(t0) Matrice de module élastique instantané (6.23)
σél
jεél
j, Solutions élémentaires du problème d’élasticité (6.36) (6.37)
ξél
j, qél
jinstantanée
σél
k, εél
k, ξél
kSolutions élémentaires du problème d’élasticité (6.42)
instantanée

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Chapitre II – Viscoélasticité linéaire tridimensionnelle 95
Comportement viscoelastique linéaire tridimensionnel
1. Approches multidimensionnelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
2. Expériences fondamentales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 972.1. Problématique pour le milieu continu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 972.2. Expérience de retard . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 982.3. Expérience de relaxation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
3. Comportement viscoélastique linéaire tridimensionnel . . . . . . . . . . . . . . . . 983.1. Hypothèse de linéarité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 983.2. Formules de Boltzmann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
4. Materiau viscoélastique linéaire isoliope . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1034.1. Symétries matérielles : isotropie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1034.2. Loi de comportement viscoélastique linéaire isotrope . . . . . . . . . . . . . . . . . . . .103
5. Comportement viscoélastique linéaire en l’absence vieillissement . . . 1085.1. Materiau viscoélastique linéaire non-vieillissant . . . . . . . . . . . . . . . . . . . . . . . . . 1085.2. Formules de Boltzmann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1095.3. Utilisation du calcul opérationnel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1095.4. Matériau viscoélastique linéaire non-vieillissant isotrope . . . . . . . . . . . . . . . . 1105.5. Commentaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .112
6. Évolutions viscoélastiques quasi-statiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1136.1. Problème d’évolution quasi-statique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1136.2. Hypothèse des petites perturbations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1146.3. Problématique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1156.4. Principe de superposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1166.5. Matériau homogène et isotrope à coefficient de Poisson constant . . . . . . . . 1186.6. Matériau constitutif viscoélastique linéaire non-vieillissant . . . . . . . . . . . . . . 1236.7. Commentaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .126
Exemples de mise en œuvre
7. Barre cylindrique homogène . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1277.1. Problématique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1277.2. Traction-compression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 987.3. Flexion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1297.4. Torsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
8. Convergence d’une cavité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1328.1. Définition du problème . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1328.2. État de précontrainte géologique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1328.3. Réponse instantanée au creusement de la cavité . . . . . . . . . . . . . . . . . . . . . . . . 1338.4. Réponse différée au creusement de la cavité . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1338.5. Mise en place d’un revêtement de soutènement . . . . . . . . . . . . . . . . . . . . . . . . . 134
Récapitulatif des formules essentielles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
1 – Approches multidimensionnelles 97
Comportement viscoélastique linéairetridimensionnel
1 Approches multidimensionnelles
Le chapitre précédent a permis d’introduire, à partir des expériences fondamentalesde retard et de relaxation, les concepts de base de la viscoélasticité dans le cadreunidimensionnel. La formulation générale du modèle de comportement viscoélastiquelinéaire unidimensionnel a ainsi été donnée dans la section 7 de ce chapitre. On a aussiremarqué alors que, s’agissant du milieu continu, la définition et l’identification d’uncomportement uniaxial, par exemple en traction simple, correspond en quelque sorteà la projection unidimensionnelle d’une expérience tridimensionnelle, ignorant ainsiles autres dimensions du comportement. C’est ainsi que si la définition de l’expériencede retard en traction simple ne pose conceptuellement pas de difficulté du point devue de la sollicitation imposée en force, l’expérience duale, la relaxation en tractionsimple, correspond à une sollicitation mixte en déplacement et en force.
L’objet du présent chapitre est, sur la base des concepts déjà introduits, d’établir laformulation de la loi de comportement viscoélastique linéaire pour le milieu continutridimensionnel. Cette approche pourra servir de prototype pour la formulation detoute loi viscoélastique linéaire multidimensionnelle.
2 Expériences fondamentales
2.1 Problématique pour le milieu continu
On se place toujours dans l’hypothèse des petites perturbations (H.P.P.) àpartir de l’état initial naturel et des évolutions isothermes. Pour l’élément de milieucontinu, les variables duales dans l’expression de la puissance de déformation sontle tenseur des contraintes de Cauchy σ et le taux de déformation d. On introduitla déformation linéarisée ε à partir de l’état initial naturel pris comme référence
géométrique. Dans l’hypothèse H.P.P. on sait que l’on peut assimiler d ∼=dε
dt.
La définition naturelle des expériences fondamentales de retard et de relaxationsuit les démarches des sections 2.1 et 2.2 du chapitre I en les adaptant au contextetridimensionnel.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
98 Chapitre II – Viscoélasticité linéaire tridimensionnelle
2.2 Expérience de retard
L’expérience de retard du point de vue tridimensionnel est ainsi définie, de façongénérale, par l’histoire de sollicitation en contrainte :
σ(t) = σ0Yt0(t)(2.1a)
σ = σ0Yt0 .(2.1b)
Les expériences spécifiques, cas particuliers de (2.1), sont alors définies par laforme particulière du saut σ0 telles que l’expérience de retard en traction simple dansune direction ex pour laquelle
σ0 = σ0e x ⊗ e x .(2.2)
La réponse dans une telle expérience est représentée par l’histoire ε , nulle pourt < t0, sous la forme ε(t0, t;σ0).
2.3 Expérience de relaxation
Le matériau étant supposé doué d’élasticité instantanée, l’expérience de relaxa-tion du point de vue tridimensionnel est définie, de façon générale, par l’histoire desollicitation en déformation :
ε(t) = ε0Yt0(t)(2.3a)
ε = ε0Yt0(2.3b)
et les expériences spécifiques correspondent à des formes particulières du saut ε0.
La réponse dans l’expérience de relaxation est l’histoire de σ , nulle pour t < t0,sous la forme : σ(t0, t; ε
0).
On voit ici que l’expérience de relaxation définie par
ε0 = ε0ex ⊗ ex(2.4)
n’est pas l’expérience duale de l’expérience de retard définie par (2.2).
3 Comportement viscoélastique linéairetridimensionnel
3.1 Hypothèse de linéarité
En l’absence d’hypothèses complémentaires sur le comportement du matériauconsidéré, qui devront évidemment être validées, il est exclus de formuler quelque

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
3 – Comportement viscoélastique linéaire tridimensionnel 99
espèce de théorie générale susceptible d’application pratique au-delà des considé-rations de la section précédente. On suppose désormais que le matériau étudié estBoltzmannien, c’est-à-dire que son comportement mécanique est régi par le principede superposition énoncé au chapitre I (§ 3.1), qui sera maintenant appliqué auxhistoires σ et ε.
Avec les notations homologues de celles du chapitre I (§ 3.1), la loi de comporte-ment isotherme du matériau détermine à chaque instant ε(t) en fonction de l’histoirede σ jusqu’à cet instant :
ε(t) = Ft
[ t
σ(τ)−∞
]
(3.1)
et inversement
σ(t) = Rt
[ t
ε(τ)−∞
]
.(3.2)
Ces formules explicitent à l’instant t les correspondances fonctionnelles F et Rinverses l’une de l’autre :
σF7−→ ε(3.3)
εR7−→σ .(3.4)
En conséquence de l’hypothèse de linéarité, ces correspondances sont linéaires.Il en résulte en particulier qu’une histoire de sollicitation multidimensionnelle peutêtre considérée comme la superposition d’histoires de sollicitation unidimensionnelleset que la réponse qui lui correspond est la superposition des réponses à ces histoires.C’est la signification du paragraphe suivant.
3.2 Retard et relaxation
3.2.1 Expérience de retard
La linéarité du comportement permet d’exprimer la réponse ε(t0, t;σ0) dans l’ex-périence générale de retard sous la forme tensorielle homologue de l’équation (4.1) duchapitre I :
σ(t) = σ0Yt0(t)
ε(t) = J(t0, t) : σ0, ∀σ0(3.5)
où J(t0, t) est un tenseur du 4ème ordre, fonction de t, nul pour t < t0, et où le symbole
« : » représente le produit doublement contracté sur les deux derniers indices de

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
100 Chapitre II – Viscoélasticité linéaire tridimensionnelle
J(t0, t) avec le tenseur du second ordre σ0. De façon explicite, en base orthonormée(1) :
J(t0, t) = Jijhk(t0, t) e i ⊗ e j ⊗ eh ⊗ e k
ε(t) = J(t0, t) : σ0 = Jijhk(t0, t)σ0kh.
(3.6)
Le tenseur σ0 étant symétrique (σhk = σkh), seule la somme [ Jijhk(t0, t) +Jijkh(t0, t) ] est physiquement définie et peut être déterminée expérimentalement. Ilest commode, comme en élasticité linéaire, de symétriser le tenseur J(t0, t) sur ses
deux derniers indices
Jijhk(t0, t) = Jijkh(t0, t) .(3.7)
Par ailleurs, le tenseur ε(t) étant symétrique, J(t0, t) est symétrique sur ses deux
premiers indices :
Jijhk(t0, t) = Jjihk(t0, t) .(3.8)
3.2.2 Expérience de relaxation
De la même façon que ci-dessus, la réponse σ(t0, t; ε0) dans l’expérience de relaxa-
tion s’exprime en introduisant le tenseur du 4ème ordre R(t0, t), fonction de t, nul
pour t < t0 :
ε(t) = ε0Yt0(t)
σ(t) = R(t0, t) : ε0 , ∀ε0(3.9)
Sous forme explicite en base orthonormée :
σ(t) = R(t0, t) : ε0 = Rijhk(t0, t) ε0kh.(3.10)
Par les mêmes arguments que précédemment on symétrise R(t0, t) sur ces deux
derniers indices ; la symétrie sur les deux premiers indices résulte de la symétriede σ(t) :
Rijhk(t0, t) = Rijkh(t0, t) = Rjihk(t0, t) .(3.11)
3.2.3 Élasticité instantanée
En reprenant les conventions du chapitre I on convient de noter J(t0, t0) etR(t0, t0)
les valeurs de J(t0, t) et R(t0, t) pour t = t+0 . Ainsi J(t0, t0) et R(t0, t0) représentent
respectivement les tenseurs des complaisances et des modules élastiques instantanés.
(1)Sauf mention explicite du contraire, on adopte la convention de sommation sur les indices répétés(indices« muets »).

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
3 – Comportement viscoélastique linéaire tridimensionnel 101
Ils possèdent notamment la symétrie entre les groupes d’indices (i, j) et (h, k) due àl’existence du potentiel thermoélastique :
Jijhk(t0, t0) = Jhkij(t0, t0),(3.12)
Rijhk(t0, t0) = Rhkij(t0, t0) .(3.13)
Enfin, ces tenseurs, exprimant les correspondances réciproques de l’élasticité ins-tantanée, sont « inverses » l’un de l’autre ; en introduisant le tenseur 1l défini par :
1l =1
2(δihδjk + δikδjh) e i ⊗ e j ⊗ eh ⊗ e k,(3.14)
il vient ainsi
J(t0, t0) : R(t0, t0) = 1l .(3.15)
3.2.4 Symétries matérielles
Lorsque des symétries matérielles sont validées, les relations d’invariance corres-pondantes réduisent le nombre de coefficients indépendants dans les matrices destenseurs J(t0, t) et R(t0, t) pourvu que l’on puisse admettre que ces symétries sont
conservées au cours de l’évolution, en considération du cadre H.P.P. La section sui-vante est consacrée à l’étude du cas particulier du matériau isotrope.
3.3 Formules de Boltzmann
Le raisonnement mis en œuvre au chapitre I (§ 4.3) pour établir la réponse à unehistoire donnée quelconque de σ ou de ε peut être intégralement repris ici pour σ etε en prenant en compte le caractère tensoriel des grandeurs en cause.
Ainsi, pour la réponse à une histoire de σ, on obtient la formule homologue del’expression (4.20) du chapitre I :
ε(t) = J(t, t) : σ(t) −
∫ t
t0
∂J
∂τ(τ, t) : σ(τ) dτ(3.16)
De même, la réponse à une histoire de ε donnée s’écrit :
σ(t) = R(t, t) : ε(t) −
∫ t
t0
∂R
∂τ(τ, t) : ε(τ) dτ(3.17)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
102 Chapitre II – Viscoélasticité linéaire tridimensionnelle
Ces expressions qui peuvent aussi se mettre sous la forme d’intégrales de Stieltjes.
ε(t) = −
∫ ∞
−∞
∂J
∂τ(τ, t) : σ(τ) dτ
σ(t) = −
∫ ∞
−∞
∂R
∂τ(τ, t) : ε(τ) dτ
(3.18)
Sans surprise on retrouve, au caractère tensoriel près, le même opérateur intégralqu’au chapitre I (§ 4.4.1). Pour les correspondances fonctionnelles F et R, inversesl’une de l’autre, on adoptera les notations homologues des équations (4.28) du chapitreI :
σF7−→ ε = − <
∂J
∂τ(:)σ >= J (× :)σ
εR7−→σ = − <
∂R
∂τ(:) ε >= R (× :) ε
(3.19)
qui sont explicitées par (3.16), (3.17) et (3.18).
Comme dans le cas unidimensionnel, l’application de (3.19) aux expériences fonda-mentales de retard et de relaxation permet d’établir des identités autour de l’opérateurintégral qui expriment que les « matrices » de retard et de relaxation sont inversesl’une de l’autre à travers cet opérateur.
Par définition on a, pour l’expérience de retard :
∀σ0 , J t0 : σ0 = J (× :)σ0 Yt0(3.20)
d’où(2)
J t0 = J (×)Yt0(3.21)
De même, pour l’expérience de relaxation, il vient(3) :
Rt0 = R (×)Yt0(3.22)
Pour écrire les formules d’inversion, homologues de (4.33 à 4.35) du chapitre I, onutilise le tenseur 1l défini par (3.14). Ainsi, en inversant (3.21), on obtient :
R (× :)J t0 = 1lYt0(3.23)
(2)Compte tenu des symétries sur les indices.(3)Ces identités s’obtiennent directement en appliquant les identités (4.31) et (4.32) du chapitre I
à chacune des composantes de J ou R.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
4 – Matériau viscoélastique linéaire isotrope 103
et, à partir de (3.22),
J (× :)Rt0 = 1lYt0 .(3.24)
Ces formules s’écrivent aussi :
<∂J
∂τ(:)
∂Rt0
∂t0>=<
∂R
∂τ(:)
∂J t0
∂t0>= 1l δt0 .(3.25)
On peut ici encore signaler que la formule d’inversion entre les tenseurs des mo-dules élastiques instantanés et des complaisances élastiques instantanées (3.15) estune conséquence particulière de (3.23) ou (3.24).
4 Matériau viscoélastique linéaire isotrope
4.1 Symétries matérielles : isotropie
Dans le cadre de l’hypothèse des petites perturbations, on s’intéresse désormais àl’impact des symétries matérielles, supposées conservées au cours de l’évolution, surl’écriture de la loi de comportement viscoélastique linéaire : la loi de comportementdoit être invariante dans toute transformation appartenant au groupe d’isotropie dumatériau effectuée sur σ et ε.
Compte tenu de son importance pratique on se restreindra au cas particulier dumatériau isotrope. Du point de vue mathématique, le respect des symétries maté-rielles impose alors que les équations (3.19) soient invariantes dans toute rotation ousymétrie, ce qui conduit à des restrictions sur le nombre de coefficients indépendantsdes matrices des tenseurs J(t0, t) et R(t0, t).
4.2 Loi de comportement viscoélastique linéaire isotrope
4.2.1 Expérience de retard pour le matériau isotrope
On reprend l’expérience générale de retard décrite par :
σ(t) = σ0 Yt0(t)
ε(t) = J(t0, t) : σ0 , ∀σ0 .(4.1)
À l’instant t0, la relation entre les tenseurs σ0 et ε(t0) est celle de l’élasticité linéaireisotrope. D’après le théorème général de représentation des fonctions tensorielles iso-tropes(4), le tenseur ε(t0), fonction linéaire isotrope du tenseur σ0, est nécessairementde la forme :
ε(t0) = A(t0, t0)σ0 +B(t0, t0)(tr σ0) 1l(4.2)
(4)Comme en élasticité linéaire, les résultats établis dans cette section pour le matériau isotrope nenécessitent pas la symétrie entre les groupes d’indices (i, j) et (h, k) de J et de R

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
104 Chapitre II – Viscoélasticité linéaire tridimensionnelle
où A(t0, t0) etB(t0, t0) sont des constantes matérielles et 1l désigne le tenseur unité.
À chaque instant t > t0, le problème mathématique de la correspondance entre lestenseurs σ0 et ε(t) dans le respect de l’isotropie du matériau demeure le même quepour t0. En conséquence la relation linéaire entre les tenseurs σ0 et ε(t) a la mêmeforme que (4.2) :
ε(t) = A(t0, t)σ0 +B(t0, t)(tr σ0) 1l(4.3)
On remarque, en explicitant (4.3), que la somme A(t0, t)+B(t0, t) n’est autre quela fonction de retard en traction simple J(t0, t) introduite au chapitre I. Onchoisit alors de mettre l’équation (4.3) sous la forme :
ε(t) = [1 + n(t, t0)]J(t0, t)σ0 − n(t0, t)J(t0, t)(tr σ0) 1l .(4.4)
Ainsi, les fonctions matérielles scalaires J(t0, t) et n(t0, t) sont déterminées, commeen élasticité, à partir d’une seule expérience de retard en traction simple effectuée selonune direction Ox quelconque :
σ0 = σ0 e x ⊗ e x
J(t, t0) =εxx(t)
σ0Yt0(t)
n(t, t0) = −εyy(t)
εxx(t)Yt0(t)
(4.5)
où l’on voit que n(t0, t) est le coefficient de Poisson dans l’expérience de retarden traction simple.
4.2.2 Expérience de relaxation pour le matériau isotrope.
La même démarche que ci-dessus peut être suivie pour l’expérience générale derelaxation décrite par :
ε(t) = ε0 Yt0(t)
σ(t) = R(t0, t) : ε0 , ∀ε0.(4.6)
De façon identique à (4.3) la réponse σ(t), fonction linéaire isotrope de ε0, s’ex-
plicite au moyen de deux fonctions scalaires, λ(t0, t) et µ(t0, t) :
σ(t) = λ(t0, t)(tr ε0) 1l+ 2µ(t0, t) ε0 .(4.7)
Les fonctions λ(t0, t) et µ(t0, t) sont d’authentiques fonctions de relaxation iden-tifiables dans des expériences simples :
• µ(t0, t) est la fonction de relaxation en cisaillement simple :
ε(t) = ε0(e x ⊗ e y + ⊗ e y ⊗ e x)Yt0(t)
µ(t0, t) =σxy(t)
2 ε0Yt0(t),
(4.8)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
4 – Matériau viscoélastique linéaire isotrope 105
• λ(t0, t) + 2µ(t0, t) est la fonction de relaxation en extension simple :
ε(t) = ε0 e x ⊗ e x Yt0(t)
λ(t0, t) + 2µ(t0, t) =σxx(t)
ε0Yt0(t)
(4.9)
• On voit aussi que 3λ(t0, t) + 2µ(t0, t) est la fonction de relaxation en compressionisotrope :
ε(t) = ε0 1lYt0(t) ⇒ σ(t) = −p(t) 1l
3λ(t0, t) + 2µ(t0, t) = −p(t)
ε0Yt0(t)
(4.10)
4.2.3 Formules de Boltzmann
Il s’agit maintenant de reprendre l’écriture des formules (3.19) compte tenu del’explicitation donnée ci-dessus pour les tenseurs J(t0, t) et R(t0, t). On obtient ainsi
pour les correspondances inverses F et R :
σF7−→ ε = [ (1 + n)J ] (×)σ − [nJ ] (×) [ tr σ ] 1l
εR7−→σ = λ (×) [ tr ε ] 1l+ 2µ (×) ε
(4.11)
La similitude de ces expressions de la loi de comportement viscoélastique linéairepour le matériau isotrope avec celles de l’élasticité linéaire isotrope est particulière-ment mise en évidence par la notation compacte adoptée pour l’opérateur intégral.On remarque toutefois qu’alors que la seconde équation de (4.11) utilise pour les fonc-tions matérielles scalaires des notations semblables à celles de l’élasticité (constantede Lamé et module de cisaillement), il n’en va de même pour la première équation.Ceci s’explique lorsque l’on explicite les formules générales d’inversion (3.23) ou (3.24)dans le cas présent du matériau isotrope, faisant apparaître deux relations entre lesfonctions J(t0, t) et n(t0, t) en retard et les fonctions λ(t0, t) et µ(t0, t) de relaxation.
Ces relations s’obtiennent aisément en considérant les deux expériences de relaxa-tion (4.8) et (4.10) auxquelles on applique (3.24). Il vient ainsi à partir de (4.8) :
[ (1 + n)J ] (×) 2µt0 = Yt0(4.12a)
qui montre que la fonction 2 [ 1+n(t0, t)J(t0, t) ] est l’inverse, pour l’opérateur intégral,de la fonction de relaxation en cisaillement simple µ(t0, t) ; c’est la fonction deretard en cisaillement simple notée γ(t0, t) :
2 [ 1 + n(t0, t)J(t0, t) ] = γ(t0, t)
γ (×)µt0 = Yt0
(4.12b)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
106 Chapitre II – Viscoélasticité linéaire tridimensionnelle
À partir de (4.10) on obtient :
[ (1 − 2n)J ] (×) (3λt0 + 2µt0) = Yt0(4.13)
qui met en évidence la fonction de retard en compression isotrope :[ (1 − 2n(t0, t) ]J(t0, t).
Les relations (4.12) et (4.13) impliquent qu’à l’instant t0 on a :
2µ(t0, t0) =1
J(t0, t0)[ 1 + n(t0, t0) ](4.14)
et
3λ(t0, t0) + 2µ(t0, t0) =1
J(t0, t0)[ 1 − 2n(t0, t0) ](4.15)
qui sont, pour l’élasticité instantanée, les relations classiques où n(t0, t0) est lecoefficient de Poisson et J(t0, t0) la complaisance (inverse algébrique du module).
On remarque (sans surprise) que les relations (4.12) et (4.13) sont, du point devue de l’opérateur intégral, semblables à celles obtenues en élasticité linéaire isotrope.
4.2.4 « Relaxation » en traction simple
Les paragraphes précédents ont présenté d’authentiques fonctions de retard etde relaxation selon les définitions (2.1) et (2.3). Par ailleurs on a déjà remarquéau chapitre I (7.1) et dans le présent chapitre (§ 2.2) que l’expérience « duale » del’expérience de retard en traction simple n’est pas, à proprement parler, une expériencede relaxation puisqu’elle correspond aux sollicitations mixtes :
εxx(t) = ε0 Yt0(t)
σij(t) = 0, i 6= x, j 6= x(4.16)
Cette expérience n’en est pas moins fondamentale du point de vue pratique carla composante σxx de sa réponse détermine la fonction de « relaxation » en tractionsimple dans le modèle unidimensionnel et sa réalisation est simple. La formule deBoltzmann (4.11) en permet l’analyse rapide. Compte tenu des restrictions (4.16) surσ(t) on obtient ainsi :
ε0 Yt0 = J (×)σxx ;(4.17)
soit, en appliquant (4.11) et en posant
σxx(t) = ε0Et0(t),(4.18)
J (×)Et0 = Yt0(4.19)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
4 – Matériau viscoélastique linéaire isotrope 107
La fonction Et0(t) est l’inverse, du point de vue de l’opérateur intégral, de la fonc-tion de retard en traction simple : c’est authentiquement la fonction de relaxationen traction simple unidimensionnelle.
La réponse dans cette expérience comprend aussi l’évolution des composantesεyy(t) = εzz(t), seules composantes non nulles de ε(t) autres que εxx(t). Il est com-mode d’introduire le coefficient de Poisson dans cette expérience, défini par :
νt0(t) = −Yt0
εyy(t)
ε0.(4.20)
On obtient par (4.11) :
νt0 = (nJ) (×)Et0(4.21)
qui implique évidemment que : ν(t0, t0) = n(t0, t0).
Les fonctions ainsi définies, Et0(t) et νt0(t) se révèlent souvent utiles dans la réso-lution de problèmes de viscoélasticité linéaire tridimensionnelle.
4.2.5 Hypothèse simplificatrice : le coefficient de Poisson est constant
Dans la pratique les résultats expérimentaux permettent souvent de valider l’hy-pothèse que le coefficient de Poisson dans l’expérience de relaxation en traction simpleest constant, évidemment égal au coefficient de Poisson de la réponse élastique ins-tantanée :
ν(t0, t) = ν Y (t0, t) .(4.22)
De (4.21) et (4.19) on déduit alors que le coefficient de Poisson dans l’expériencede retard en traction simple est, lui aussi, constant et égal à cette même valeur :
n(t0, t) = ν Y (t0, t) .(4.23)
Cette hypothèse conduit à des simplifications considérables des relations entre lesfonctions de retard et de relaxation données plus haut (§ 4.2.2).
À partir de (4.12) on obtient :
2µ(t0, t) =E(t0, t)
1 + ν(4.24)
et, à partir de (4.13)
3λ(t0, t) + 2µ(t0, t) =E(t0, t)
1 − 2ν;(4.25)
c’est-à-dire, entre les fonctions de relaxation E(t0, t), λ(t0, t), µ(t0, t) et le coefficientde Poisson, les mêmes relations qu’en élasticité linéaire. Plus encore, la formule deBoltzmann (4.11) devient :
ε = J (×) [(1 + ν)σ − ν ( tr σ) 1l ](4.26)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
108 Chapitre II – Viscoélasticité linéaire tridimensionnelle
soit, compte tenu de (4.19),
E (×) ε = (1 + ν)σ − ν ( tr σ) 1l(4.27)
identique, avec l’opérateur (×), à l’équation de comportement en élasticité linéaireisotrope. On voit que, du point de vue viscoélastique, le comportement du matériauest défini par les seules fonctions de retard ou de « relaxation » en traction simple, cequi apparente ce cas à l’approche unidimensionnelle. Cette propriété permet souventla résolution directe explicite de problèmes globaux en suivant la même démarchequ’en élasticité (§ 6.5).
5 Comportement viscoélastique linéaire en l’absencede vieillissement
5.1 Matériau viscoélastique linéaire non-vieillisant
L’hypothèse de non-vieillissement s’exprime comme au chapitre I dans le cas uni-dimensionnel. À partir de (3.1 et 3.2) :
Ft−u
[ t−u
σ(τ)−∞
]
= Ft
[ t
σ(τ − u)−∞
]
, ∀σ, ∀u(5.1)
Gt−u
[ t−u
ε(τ)−∞
]
= Gt
[ t
ε(τ − u)−∞
]
, ∀ ε, ∀u .(5.2)
On en tire les mêmes conséquences mathématiques que dans le cas unidimension-nel, qui portent maintenant sur les tenseurs J(t0, t) et R(t0, t) : ceux-ci, invariants par
translation sur le temps, ne sont plus désormais fonctions que de l’argument (t− t0) :
J(t0, t) = f(t− t0)
f(τ) = 0 si τ < 0(5.3)
et
R(t0, t) = r(t− t0)
r(τ) = 0 si τ < 0 .(5.4)
Dans toute la suite on suppose implicitement l’existence de limites finies pour f(τ)
et r(τ) quand τ → ∞ .

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
5 – Comportement viscoélastique linéaire en l’absence de vieillissement 109
5.2 Formules de Boltzmann
Dans les formules de Boltzmann (3.18), l’opérateur intégral (×) s’explicite, commeau chapitre I (§ 5.3.2.) au moyen du produit de convolution de Riemann noté ∗. Ainsi :
σF7−→ ε = f ′ (∗ :)σ = f (∗ :)σ′
εR7−→σ = r′ (∗ :) ε = r (∗ :) ε′
(5.5)
où les dérivées sont prises au sens des distributions.
Les identités (3.23) et (3.24) s’écrivent alors :
f ′ (∗ :) r = r′ (∗ :) f = 1lY(5.6)
et, pour (3.25) il vient
f ′ (∗ :) r′ = r′ (∗ :)f ′ = 1l δ .(5.7)
On en déduit :
f(0) : r(0) = 1l ,(5.8)
qui n’est autre que la relation (3.15) relative à l’élasticité instantanée, et aussi, sousles mêmes hypothèses qu’au chapitre I, le résultat nouveau relatif au comportementà l’infini :
f(∞) : r(∞) = 1l .(5.9)
5.3 Utilisation du calcul opérationnel
L’introduction du calcul opérationnel au moyen de la transformée de Carson serévèle ici particulièrement intéressante. On rappelle que, pour une fonction scalaire,
ϕ∗ = Lϕ′ = pLϕ ;(5.10)
pour les fonctions tensorielles rencontrées ici, la définition est identique.
À partir de (5.5) et (5.7) on obtient ainsi :
ε∗(p) = f∗(p) : σ∗(p)
σ∗(p) = r∗(p) : ε∗(p)
f∗(p) : r∗(p) = 1l
(5.11)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
110 Chapitre II – Viscoélasticité linéaire tridimensionnelle
où les symétries des tenseurs transformés σ∗(p), ε∗(p), f∗(p) et r∗(p), fonctions de p,
sont les mêmes que celles des tenseurs originaux, fonctions du temps.
Ces équations algébriques, où p ne joue que le rôle d’un paramètre, sont formelle-ment identiques (aux notations près) aux équations exprimant la loi de comportementde l’élasticité linéaire. Cette constatation laisse présager de l’intérêt de l’introductionde la transformation de Carson pour la résolution des problèmes d’évolution d’unsystème en matériau viscoélastique linéaire non-vieillissant, comme cela sera exposédans la section suivante (§ 6.6).
5.4 Matériau viscoélastique linéaire non-vieillissant isotrope
5.4.1 Formules de Boltzmann
Sans qu’il soit nécessaire de reprendre les raisonnements précédents, les formulesde Boltzmann (4.11) établies pour le comportement viscoélastique linéaire isotropes’écrivent désormais en explicitant l’opérateur intégral (×) au moyen de la convolutionde Riemann.
σF7−→ ε = [(1 + n)J ] ∗ σ′ − [nJ ] ∗ [ tr σ′ ] 1l
εF7−→σ = λ ∗ [ tr ε′ ] 1l+ 2µ ∗ ε′
(5.12)
En conservant les équations sous cette forme, il est parfois possible de résoudreun problème d’évolution dans l’algèbre de convolution On fait pour cela usage desformules d’inversion, issues de (4.12), (4.13), (4.19) et (4.21) :
[ (1 + n)J ] ∗ 2µ′ = Y ,(5.13)
[ (1 − 2n)J ] ∗ (3λ′ + 2µ′) = Y ,(5.14)
J ∗ E′ = Y ,(5.15)
ν = (nJ) ∗ E′ .(5.16)
Avec les transformées de Carson on obtient les formules algébriques :
®
ε∗ = [ (1 + n)J ]∗ σ∗ − [nJ ]∗ [ tr σ∗ ] 1
σ∗ = λ∗ [ tr ε∗] 1 + 2µ∗ ε∗(5.17)
avec les formules d’inversion :
2µ∗ =1
[ (1 + n)J ]∗(5.18)
(3λ∗ + 2µ∗) =1
[ (1 − 2n)J ]∗(5.19)
J∗ =1
E∗(5.20)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
5 – Comportement viscoélastique linéaire en l’absence de vieillissement 111
et
(nJ)∗ =ν∗
E∗.(5.21)
En substituant dans l’expression (5.17) de ε∗, il vient aussi :
ε∗ =1 + ν∗
E∗σ∗ −
ν∗
E∗[ trσ∗ ] 1l
σ∗ = λ∗[ tr ε∗ ] 1l+ 2µ∗ ε∗(5.22)
où l’on reconnaît, en transformées de Carson, avec les fonctions définies dans l’ex-périence de « relaxation » en traction simple, les équations classiques de l’élasticitélinéaire isotrope.
Il est utile d’examiner comment se traduisent, dans ce cas, les relations (5.8) et(5.9) relatives respectivement à l’élasticité instantanée et au comportement à l’infini.
Pour l’élasticité instantanée, la relation (5.8) on retrouve les formules classiquesde l’élasticité linéaire isotrope :
J(0) =1
E(0)(5.23)
n(0) = ν(0)(5.24)
2µ(0) =E(0)
1 + ν(0)(5.25)
3λ(0) + 2µ(0) +E(0)
1 − 2ν(0).(5.26)
Pour le comportement à l’infini il vient aussi :
J(∞) =1
E(∞)(5.27)
n(∞) = ν(∞)(5.28)
2µ(∞) =E(∞)
1 + ν(∞)(5.29)
et
3λ(∞) + 2µ(∞) +E(∞)
1 − 2ν(∞).(5.30)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
112 Chapitre II – Viscoélasticité linéaire tridimensionnelle
5.4.2 Coefficient de Poisson constant
Les formules se simplifient encore si l’on fait l’hypothèse que le coefficient dePoisson est constant, égal au coefficient de Poisson élastique instantané (§ 4.2.5) :
ε∗ =1 + ν
E∗σ∗ −
ν
E∗[ trσ∗ ] 1l
σ∗ = λ∗[ tr ε∗ ] 1l+ 2µ∗ ε∗(5.31)
avec
2µ∗ =E∗
1 + ν,(5.32)
et
(3λ∗ + 2µ∗) =E∗
1 + 2ν.(5.33)
5.5 Commentaires
5.5.1 Symétries des tenseurs f(p) et r(p)
Dans les équations (5.11), à la différence des tenseurs des complaisances et desmodules élastiques en élasticité linéaire, les tenseurs f∗(p) et r∗(p) ne présentent pas
la symétrie entre les groupes d’indices (i, j) et (h, k). Dans le cas de l’élasticité cettesymétrie résulte de l’existence du potentiel élastique dont dérive la loi de comporte-ment. Dans le cas présent de la viscoélasticité linéaire pour le matériau non vieillissant,cette symétrie peut être démontrée, si l’on se place dans le cadre d’hypothèses de lathéorie de Biot , à partir du principe d’Onsager .
À noter que cette propriété de symétrie est nécessaire pour l’application du théo-rème de correspondance de Lee-Mandel dans le cas général (§ 6.6.1), mais évidemmentpas pour le matériau isotrope.
5.5.2. Fonctions de relaxation
L’étude du cas du matériau isotrope non-vieillissant met particulièrement en évi-dence, par les expressions (5.22) et (5.31), le rôle essentiel joué par l’expérience de« relaxation » en traction simple, déjà apparent sur les formules (4.19) et (4.21). Celatient au fait que les fonctions matérielles déterminées à travers cette expérience sontles homologues des constantes matérielles E et ν déterminées en élasticité linéaire dansl’expérience de traction simple car la description mathématique de celle-ci en termesde module de Young et de coefficient de Poisson l’identifie comme une expérience derelaxation.
C’est ici l’occasion d’insister sur la confusion qui peut résulter d’une notationsouvent utilisée dans la pratique. En effet, il est fréquent que, par analogie malheureuse

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
6 – Évolutions viscoélastiques quasi-statiques 113
avec le cas élastique, l’expérience de retard en traction simple soit décrite non par lafonction de retard mais par son inverse algébrique sous la forme :
σ(t) = σ0Y (t0, t)F7−→ ε(t) = σ0 1
E(t0, t)!
Il est clair que cette écriture est sans danger tant que les seuls problèmes étudiéssont des problèmes de retard ; ainsi, la réponse d’un élément de poutre en flexion dansune expérience de retard (fluage) s’écrira-t-elle alors :
χ(t) =M0
I E(t0, t)
ce qui peut même paraître plus simple ! En revanche, la notation perd son innocuitédès qu’il s’agit d’écrire la loi de comportement et les formules de Boltzmann, pourla raison physique évoquée plus haut. Il est donc recommandable de bannir cetteécriture
et de retenir
ε = J (×)N
Set χ = J (×)
M
I(5.35)
avec les formules inverses
N = ES (×) ε et M = E I (×)χ .(5.36)
6 Évolutions viscoélastiques quasi-statiques
6.1 Problème d’évolution quasi-statique
Le concept d’évolution est schématiquement représenté sur la Figure 1. L’étatinitial du système étudié est défini au moyen des données géométriques et mécaniquesinitiales. L’histoire des sollicitations appliquées au système est prescrite à partir decet instant initial et l’on cherche à déterminer l’évolution correspondante, c’est-à-diretous les champs qui définissent l’état à chaque instant ultérieur.
Lorsque le matériau constitutif du système (qui n’est pas nécessairement homo-gène) est, en tout point, régi par une loi de comportement viscoélastique, le problèmeposé est un problème d’évolution viscoélastique et l’on verra que le système ma-nifeste lui-même, globalement, un comportement viscoélastique.
Un tel problème d’évolution est régi par le système des équations de champs dansle volume et le système des équations qui expriment les conditions aux limites surle contour. Toutes ces équations dépendent du temps, à la fois explicitement suivantl’histoire des sollicitations et implicitement en raison de l’évolution des domainesgéométriques sur lesquels elles sont écrites. Pour les équations de champs, ce sont les

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
114 Chapitre II – Viscoélasticité linéaire tridimensionnelle
équations de la dynamique, l’équation de continuité, la loi de comportement et l’équa-tion thermique. Les conditions aux limites, outre la condition thermique, prennent laforme classique pour les problèmes bien posés : donnée, en chaque point du contour età chaque instant, de trois composantes, orthogonales entre elles pour l’ensemble desdeux vecteurs, vitesse et contrainte. En ce qui concerne l’équation thermique, commedéjà annoncé, on se borne à l’étude des évolutions isothermes.
SÉtat actuel
Évolution Histoiredes
sollicitationssur le
système
DonnéesinitialesS
État initial
Figure 1 – Représentation schématique du problème d’évolution
On se place dans le cadre des évolutions quasi-statiques, qui postule que lesystème est, à chaque instant, en équilibre. Ceci suppose évidemment que les donnéesqui définissent l’état initial, puis l’histoire des sollicitations sont compatibles avec cettehypothèse, notamment :
• que la compatibilité avec l’équation d’équilibre global du système est assurée
[Fe(t)] = 0 .(6.1)
où [Fe(t)] désigne le torseur de tous les efforts appliqués au système ;
• et que les variations des sollicitations données au cours du temps sont suffisammentlentes(5).
Pour les évolutions quasi-statiques, les équations de la dynamique sont à chaqueinstant remplacées par les équations de l’équilibre.
6.2 Hypothèse des petites perturbations
On a déjà évoqué au chapitre I (section 1 et § 9.1) et au paragraphe 2.1 du présentchapitre l’hypothèse des petites perturbations (H.P.P). En fait, sauf en ce qui
(5)On remarque que cette condition est cohérente avec les considérations déjà développées au cha-pitre I (section 1) pour la définition du phénomène étudié, notamment, avec les conditions expéri-mentales pour la détermination de la loi de comportement.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
6 – Évolutions viscoélastiques quasi-statiques 115
concerne les problèmes globaux (y compris les expériences d’identification de la loide comportement), seule une partie de cette hypothèse était nécessaire : l’hypothèsede la transformation infinitésimale, qui signifie que la déformation et la rotation del’élément matériel sont infinitésimales. L’hypothèse des petites perturbations ajouteà l’hypothèse de la transformation infinitésimale l’hypothèse dite des petits déplace-ments, qui permet d’écrire les équations du problème d’évolution, à chaque instant,sur la géométrie initiale. On fait ainsi disparaître la dépendance implicite vis-à-vis dutemps signalée plus haut.
On se place désormais dans le cadre H.P.P. complet, cohérent avec la formulationde la loi de comportement viscoélastique présentée dans les sections précédentes.
6.3 Problématique
Les problèmes étudiés concernent les systèmes mécaniques constitués d’un ma-tériau viscoélastique linéaire, dont on particularisera les propriétés le moment venu.Compte tenu de l’hypothèse des petites perturbations on désigne par Ω le volume dusystème étudié et par ∂Ω son contour.
L’état initial du système est défini par l’ensemble des paramètres qui déterminentsa configuration géométrique (Ω, ∂Ω) et par l’état de contrainte initial. L’histoire dessollicitations comprend, sous réserve de (6.1) :
• l’histoire des forces de masse F (x, t) données dans le volume Ω
• et l’histoire des données au contour sur ∂Ω.
Pour celles-ci, comme annoncé plus haut, on suppose qu’il s’agit à chaque instantde la donnée de trois composantes, orthogonales entre elles, pour l’ensemble des deuxvecteurs, contrainte et vitesse (figure 2). On désigne à chaque instant par SUi
(t) etSTi
(t) respectivement les surfaces complémentaires de ∂Ω sur lesquelles les compo-santes Ui(t) du vecteur vitesse U(t) et Ti(t) du vecteur contrainte T (t) sont données.
Ω
2
M
3
1
∂Ω
Figure 2 – Données au contour
On se place de plus dans l’hypothèse où les surfaces SUi(t) et STi
(t) demeurentinchangées pendant la durée de l’histoire étudiée en sorte que :
SUi(t) ≡ SUi
et STi(t) ≡ STi
.(6.2)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
116 Chapitre II – Viscoélasticité linéaire tridimensionnelle
Il s’ensuit, par intégration par rapport au temps, que l’on peut écrire les donnéesaux limites sous la forme :
Sξi∩ STi
= ∅, Sξi∪ STi
= ∂Ω
ξi(x, t) = ξdi (x, t) sur Sξi
Ti(x, t) = T di (x, t) sur STi
(6.3)
où Sξi≡ SUi
et ou l’indice supérieur « d » indique la fonction donnée. On peutévidemment élargir cette hypothèse d’invariance de la nature des données aux limitesen supposant que l’histoire est constituée d’une succession d’époques de durées finiesau cours desquelles les surfaces SUi
(t) et STi(t) demeurent invariables ; chacune des
époques étant alors analysée séparément.
La loi de comportement du matériau constitutif est la loi viscoélastique linéairesous la forme générale (3.19) :
ε = J (× :)σ
σ = R (× :) ε(6.4)
où J et R dépendent de la variable spatiale x si le matériau n’est pas homogène.
Au total, les équations du problème d’évolution quasi-statique, dans l’hypothèsedes petites perturbations, en viscoélasticité linéaire, s’écrivent :
Équations de champs
div σ(x, t) + ρ F (x, t) = 0(6.5)
ε(x, t) =1
2[ grad ξ(x, t) +t grad ξ(x, t) ](6.6)
ε(x, t) = [ J (× :)σ ](x, t)
σ(x, t) = [R (× :) ε ](x, t)(6.7)
Conditions aux limites (SUi(t) et STi
(t) indépendantes de t)
Sξi∩ STi
= ∅, Sξi∪ STi
= ∂Ω
ξi(x, t) = ξdi (x, t) sur Sξi
Ti(x, t) = T di (x, t) sur STi
(6.3)
6.4 Principe de superposition
Le système des équations de champs et des conditions aux limites écrit ci-dessusrappelle évidemment celui de l’équilibre élastique linéarisé. Dans les équations (6.3,

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
6 – Évolutions viscoélastiques quasi-statiques 117
6.5 et 6.6), la variable t joue le rôle d’un simple paramètre ; en revanche, dans la loi decomportement (6.7), t intervient dans l’opérateur intégral de Boltzmann (×). Pas plusqu’en élasticité linéaire, il n’est possible d’énoncer une méthode générale systématiqueet purement déductive qui permette de résoudre le problème quasi-statique ainsi posé.Aux difficultés déjà importantes connues dans le cas de l’élasticité s’ajoutent ici cellesdues à la forme intégrale de la loi de comportement.
Il est toutefois possible d’énoncer un résultat général important :
Le problème posé sous la forme (6.3, 6.5 à 6.7) est linéaire
En d’autres termes la correspondance entre les histoires de σ et ξ d’une part et leshistoires des données F sur Ω et ξdi et T d
i sur Sξiet STi
d’autre part est linéaire. C’estle principe de superposition énoncé désormais au niveau global du système(6). Ilest essentiel de remarquer qu’il est la conséquence, non seulement de la linéarité dela loi de comportement du matériau constitutif (linéarité physique), mais aussi del’hypothèse des petites perturbations et de l’hypothèse sur la forme des conditionsaux limites (linéarité géométrique).
Si les histoires σ1 et ξ1 sont solutions du problème d’évolution viscoélastique avecles histoires F 1, (ξdi )1 et (T d
i )1 pour données ;
Si les histoires σ2 et ξ2 sont solutions du problème d’évolution viscoélastique avec
les histoires F 2, (ξdi )2 et (T di )2 pour données ;
Alors, ∀λ1, ∀λ2 les histoires
σ = λ1 σ1 + λ2 σ2 et ξ = λ1 ξ1 + λ2 ξ2(6.8)
sont solutions du même problème d’évolution viscoélastique avec les histoires données :
F = λ1 F 1 + λ2 F 2 dans le volume Ω(6.9)
et
ξdi = λ1 (ξdi )1 + λ2 (ξdi )2 sur Sξiet T d
i = λ1 (T di )1 + λ2 (T d
i )2 sur STi(6.10)
Il est évident que ce principe n’est et ne demeure valable que pour autant que leshypothèses rappelées plus haut sont satisfaites.
Au-delà de ce résultat général, il est possible, pour certaines formes particulières dela loi de comportement et/ou pour certains types de problèmes, d’établir des résultatspermettant de relier la solution du problème d’évolution viscoélastique linéaire à celled’un problème d’équilibre élastique linéarisé homologue : c’est l’objet des sectionssuivantes.
(6)Cf. chapitre I (§ 9.2).

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
118 Chapitre II – Viscoélasticité linéaire tridimensionnelle
6.5 Matériau homogène et isotrope à coefficient de Poissonconstant
On suppose ici que le système étudié est constitué d’un matériau viscoélastiquelinéaire homogène, isotrope et dont le coefficient de Poisson est constant .Avec les notations du paragraphe 4.2.5, J(t0, t), E(t0, t) et ν désignent respectivementla fonction de retard en traction simple, la fonction de relaxation en traction simpleunidimensionnelle et le coefficient de Poisson. La loi de comportement (6.7) s’expliciteen :
ε(x, t) = J (×) [ (1 + ν)σ − ν(tr σ) 1l ] (x, t)(6.11)
6.5.1 Problème de type « retard »
On s’intéresse aux problèmes d’évolution dans lesquels les données F sur Ω et ξdiet T d
i sur Sξiet STi
sont de la forme :
F (x, t) = F 0(x)Yt0(t) sur Ω
ξdi (x, t) = 0 sur Sξi
T di (x, t) = [T d
i ]0 (x)Yt0 sur STi
(6.12)
À l’instant initial de la sollicitation, t0, le problème est un problème d’élasti-
cité instantanée avec le module de Young E(t0, t0) =1
J(t0, t0)et le coefficient de
Poisson ν. Soient σ0(x), ε0(x) et ξ0(x) les champs solutions de ce problème.
La solution du problème de retard pour t > t0 est alors donnée par les champs :
σ(x, t) = σ0(x)Yt0(t)
ε(x, t) = ε0(x)J(t0, t)
J(t0, t0)
ξ(x, t) = ξ0(x)J(t0, t)
J(t0, t0)
(6.13)
En effet :
• le champ σ(x, t) satisfait évidemment (6.5) et la condition aux limites sur lescontraintes dans (6.3) avec (6.12) ;
• le champ ε(x, t) est associé à σ(x, t) par la loi de comportement (6.11) ;
• proportionnel à ε0(x, t), le champ ε(x, t) est géométriquement compatible ; le
champ ξ(x, t) qui lui est associé, proportionnel à ξ0(x, t), satisfait les conditionsaux limites sur les déplacements (6.3), nulles d’après (6.12).
Ainsi, les efforts intérieurs demeurent constants pour t > t0 tandis que les défor-mations et les déplacements évoluent proportionnellement à la fonction de retard dumatériau constitutif.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
6 – Évolutions viscoélastiques quasi-statiques 119
6.5.2 Évolution prescrite par des paramètres de chargement
À partir de la solution du problème de type « retard », la linéarité énoncée au pa-ragraphe 6.4 permet formellement de déduire la solution de tout problème d’évolutiondans lequel les données ξdi (x, t) sur Sξi
sont nulles.
Dans la pratique, les évolutions concernées sont celles où les données F (x, t) surΩ et T d
i (x, t) sur STidépendent linéairement de n paramètres scalaires Qj(t), appelés
paramètres de chargement , composantes d’un vecteur chargement Q(t). À cesparamètres sont associés, dans l’expression de la puissance des efforts extérieurs, lesparamètres cinématiques qj(t), composantes du vecteur cinématique q(t). Une telleévolution(7) est ainsi prescrite par l’histoire du vecteur chargement et la réponse ob-servable du système est donnée par q(t) .
On peut ainsi prescrire une histoire de retard
Q(t) = Q0 Yt0(t) ,(6.14)
pour laquelle la réponse élastique instantanée à l’instant t0 s’écrit(8) :
σ(x, t0) = σél
j(x)Q0
j = σél
j(x)Qj(t0)
ε(x, t0) = εélj(x)Jt0(t0)Q
0j = εél
j(x)Jt0(t0)Qj(t0)
ξ(x, t0) = ξélj(x)Jt0(t0)Q
0j = ξél
j(x)Jt0(t0)Qj(t0)
(6.15)
et
q(t0) = qéljJt0(t0)Q
0j = qél
jJt0(t0)Qj(t0)(6.16)
(avec sommation sur les indices répétés). Dans ces formules, σél
j, εél
j, ξél
jet qél
jsont,
compte tenu de l’homogénéité du matériau et de la forme de la loi de comportement(6.11), des fonctions géométriques indépendantes du temps et de l’expression de Jt0(t),déterminées par les solutions du problème d’élasticité instantanée à t0 lorsque le pa-ramètre de chargement Qj(t0) prend la valeur unité, les autres étant nuls (solutionsélémentaires pour Jt0(t0) = 1 et Qj(t0) = 1).
La réponse instantanée du système à l’instant t0 s’écrit aussi
q(t0) = qéljJt0(t0)Qj(t0) = Λ(t0).Q(t0)(6.17)
où Λ(t0) désigne la matrice symétrique de complaisance élastique instanta-née(9) du système à l’instant t0, proportionnelle à Jt0(t0).
Par les mêmes arguments que ceux utilisés ci-dessus pour justifier (§ 6.13) on voitque, pour une histoire quelconque du vecteur chargementQ(t), la solution du problèmed’évolution est donnée par :
(7)Ce concept est identique à celui introduit au chapitre I (§ 9.3.1).(8)Dans toute la suite, sauf mention explicite du contraire, sommation sur les indices répétés.(9)En désignant par uj les vecteurs unitaires dans l’espace des paramètres de chargement, on a :
Λ(t0) = Jt0(t0) qélj⊗ uj .

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
120 Chapitre II – Viscoélasticité linéaire tridimensionnelle
(6.18)
σ = σél
jQj
ε = εélj[ J (×)Qj ]
ξ = ξélj[ J (×)Qj ]
(6.19) q = qélj[ J (×)Qj ] = Et0(t0)Λ(t0).[ J (×)Q ]
En conclusion, la réponse du système à une histoire quelconque des paramètresde chargement s’obtient à partir de la réponse élastique instantanée du système. Larelation fonctionnelle (6.19) exprime la loi de comportement globale du systèmepour ce type de données. Le système a globalement un comportement viscoélas-tique linéaire. L’inversion de (6.19) est immédiate :
Q =1
Et0(t0)Λ−1(t0).[E (×) q ] .(6.20)
6.5.3 Problème de type « relaxation »
De la même façon qu’au paragraphe 6.5.1, on s’intéresse maintenant aux problèmesd’évolution dans lesquels les données F sur Ω et ξdi et T d
i sur Sξiet STi
sont de laforme :
F (x, t) = 0 sur Ω
ξdi (x, t) = [ ξdi ]0(x)Yt0(t) sur Sξi
T di (x, t) = 0 sur STi
(6.21)
Soient σ0(x), ε0(x) et ξ0(x) les champs solutions du problème élastique instantanéà t0. Sans qu’il soit nécessaire de reprendre les arguments précédents on voit que lasolution du problème de relaxation pour t > t0 est alors donnée par les champs :
σ(x, t) = σ0(x)E(t0, t)
E(t0, t0)
ε(x, t) = ε0(x)Yt0(t)
ξ(x, t) = ξ0(x)Yt0(t)
(6.22)
Ainsi, les déformations et les déplacements demeurent constants pour t > t0 tan-dis que les contraintes évoluent proportionnellement à la fonction de relaxation dumatériau constitutif.
6.5.4 Évolution prescrite par des paramètres cinématiques
La démarche est identique à celle du paragraphe 6.5.2. Les données ξdi sur Sξidé-
pendent linéairement de m paramètres cinématiques scalaires qk(t), composantes

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
6 – Évolutions viscoélastiques quasi-statiques 121
du vecteur cinématique q(t), , tandis que F sur Ω et T di sur STi
sont mainte-nues nulles. On désigne par Qk(t), composantes du vecteur de chargement Q(t), lesparamètres associés aux qk(t) dans l’expression du travail des efforts extérieurs. Ons’intéresse aux évolutions prescrites par l’histoire du vecteur cinématique(10) q(t), laréponse du système étant donnée par Q(t).
On adopte des notations semblables à celles de (6.15 et 6.17) pour expliciter laréponse instantanée du système, compte tenu de l’homogénéité du matériau et de laloi de comportement (6.11) :
σ(x, t0) = σél
k(x)Et0(t0) qk(t0)
ε(x, t0) = εélk(x) qk(t0)
ξ(x, t0) = ξélk(x) qk(t0)
Q(t0) = Qél
kEt0(t0) qk(t0) = A(t0).q(t0)
(6.23)
où A(t0) est la matrice symétrique de module élastique instantané(11) du
système à l’instant t0, proportionnelle à Et0(t0). Dans ces formules, σél
k, εél
k, ξél
ket Qél
ksont encore et pour les mêmes raisons que précédemment des fonctions géométriquesindépendantes du temps et de la forme de Et0(t), déterminées par les solutions duproblème d’élasticité instantanée à t0 lorsque le paramètre cinématiques qk(t0) prendla valeur unité tandis que les autres sont nuls (solutions élémentaires pour Et0(t0) = 1et qk(t0) = 1).
Il s’ensuit que la solution du problème d’évolution pour une histoire quelconquedu vecteur cinématique q(t) s’écrit :
(6.24)
σ = σél
k[E (×) qk ]
ε = εélkqk
ξ = ξélkqk
(6.25) Q = Qél
k[E (×) qk ] =
1
Et0(t0)A(t0).[E (×) q ]
.
q = Et0(t0)A−1(t0).[ J (×)Q ].(6.26)
Les équations (6.19) et (6.20) d’une part et (6.26) et (6.25) d’autre part sontévidemment identiques si les paramètres de chargement et les paramètres cinématiquessont les mêmes dans l’un et l’autre cas.
(10)Concept identique à celui introduit au chapitre I (§ 9.3.2).(11)En désignant par u∗
kles vecteurs unitaires dans l’espace des paramètres cinématiques, on a :
A(t0) = Et0(t0) Qélk⊗ u∗
k.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
122 Chapitre II – Viscoélasticité linéaire tridimensionnelle
6.5.5 Applications pratiques
Les résultats précédents montrent que pour des histoires prescrites par des pa-ramètres de chargement ou pour des histoires prescrites par des paramètres cinéma-tiques, dans le cadre d’hypothèses indiqué (H.P.P., matériau homogène, isotrope, àcoefficient de Poisson constant) qui devra être validé, la solution du problèmed’évolution s’obtient formellement
1o en explicitant la réponse élastique instantanée sous la forme (6.15, 6.16) ou(6.23) ;
2o en effectuant les passages décrits par (6.27 à 6.30).
• Pour une histoire définie par des paramètres de chargement :
(6.27)
σ(x, t0) = σél
j(x)Qj(t0)
ε(x, t0) = εél
j(x) Jt0(t0) Qj(t0)
ξ(x, t0) = ξél
j(x) Jt0(t0)Qj(t0)
⇒
σ(x, t) = σél
j(x) Qj(t)
ε(x, t) = εél
j(x)[ J (×)Qj ](t)
ξ(x, t) = ξél
j(x)[ J (×)Qj ](t)
(6.28) q(t0) = qél
jJt0(t0) Qj(t0) ⇒ q(t) = qél
j[ J (×)Qj ](t)
• Pour une histoire définie par des paramètres cinématiques :
(6.29)
σ(x, t0) = σél
k(x) Et0(t0) qk(t0)
ε(x, t0) = εél
k(x) qk(t0)
ξ(x, t0) = ξél
k(x) qk(t0)
⇒
σ(x, t) = σél
k(x) [ E (×) qk ](t)
ε(x, t) = εél
k(x) qk(t)
ξ(x, t) = ξél
k(x) qk(t)
(6.30) Q(t0) = Qél
kEt0(t0) qk(t0) ⇒ Q(t) = Qél
k[ E (×) qk ](t)
Pour les problèmes rencontrés dans la pratique, il est fréquent que l’histoire dessollicitations soit composée d’épisodes successifs d’évolutions prescrites par des pa-ramètres de chargement et d’évolutions prescrites par des paramètres cinématiques ;souvent même on rencontre simplement une évolution de type « retard » suivie d’uneévolution de type « relaxation » ou inversement. L’application du principe de super-position permet alors de résoudre ces problèmes en appliquant les règles précédentes(cf. section 8).
Comme annoncé au paragraphe 4.2.5, c’est ici qu’apparaît l’importance de l’hypo-thèse « coefficient de Poisson constant » sur le comportement viscoélastique linéairedu matériau constitutif qui pouvait, lors de son introduction, sembler anecdotique.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
6 – Évolutions viscoélastiques quasi-statiques 123
La similitude des résultats établis ci-dessus avec ceux du chapitre I (§ 9.3) dans le casunidimensionnel confirme la remarque faite alors. En fait, comme on le verra dans lasection 8, le type de raisonnement mis en œuvre dans les paragraphes précédents peutêtre reproduit dès que le système étudié est homogène et que les problèmes considérésne font intervenir qu’une seule fonction de retard ou de relaxation.
6.6 Matériau constitutif viscoélastique linéaire non-vieillissant
6.6.1 Théorème de correspondance
On suppose ici que le système étudié, sans condition d’homogénéité, est consti-tué d’un matériau viscoélastique linéaire non-vieillissant . Comme exposé auparagraphe 5.3, les équations de comportement s’expriment, en transformées de Car-son, comme de simples équations algébriques tensorielles (5.11), formellement iden-tiques aux équations du comportement élastique linéaires. L’idée vient alors d’exa-miner si l’application de la transformation de Carson au problème d’évolution dansson intégralité conduit à une méthode de résolution pratique. Reprenant les équations(6.3), (6.5 à 6.7), il apparaît que, compte tenu de l’hypothèse des petites perturbationset de l’hypothèse sur la forme des conditions aux limites, notamment l’invariance dansle temps des surfaces SUi
(t) et STi(t) , la transformation de Carson donne :
Équations de champs
div σ∗(x, p) + ρF ∗(x, p) = 0(6.31)
ε∗(x, p) =1
2[ grad ξ∗(x, p) +t grad ξ∗(x, p)](6.32)
ε∗(x, p) = f∗(x, p) : σ∗(x, p)
σ∗(x, p) = r∗(x, p) : ε∗(x, p)(6.33)
où la présence de la variable x dans f∗(x, p) et r∗(x, p) manifeste l’hétérogénéité
possible du matériau. Les propriétés de symétrie de ces tenseurs ont été discutées auparagraphe 5.5.1.
Conditions aux limites (SUi(t) et STi
(t) indépendantes de t)
Sξi∩ STi
= ∅, Sξi∪ STi
= ∂Ω
ξ∗i (x, p) = [ ξdi ]∗(x, p) sur Sξi
T ∗i (x, p) = [T d
i ]∗(x, p) sur STi
(6.34)
Il apparaît alors que le problème posé par les équations (6.31 à 6.34) est formelle-ment identique à un problème d’équilibre élastique linéarisé pour les transforméesde Carson des champs donnés et inconnus avec la loi de comportement élastique li-néaire (6.33), dans lequel la variable p ne joue que le rôle d’un paramètre.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
124 Chapitre II – Viscoélasticité linéaire tridimensionnelle
Si la solution de ce problème est connue sous forme explicite, il suffit d’appliquer lesformules correspondantes aux transformées pour obtenir explicitement la transforméede Carson de la solution du problème original d’évolution viscoélastique. L’inversionde la transformation de Carson fournit ensuite la solution du problème d’évolutionviscoélastique(12).
Ce résultat exprime, dans sa forme la plus générale, le théorème de correspon-dance de Lee-Mandel, déjà énoncé au chapitre I (§ 9.4).
6.6.2 Matériau isotrope
Si le matériau constitutif du système est isotrope l’application des résultats pré-cédents est facilitée par la forme simple des équations de comportement (5.22). Onsubstituera donc à (6.33) :
ε∗(x, p) =1 + ν∗(x, p)
E∗(x, p)σ∗(x, p) −
ν∗(x, p)
E∗(x, p)[ tr σ∗(x, p) ] 1l
σ∗(x, p) = λ∗(x, p)[ tr ε∗(x, p) ] 1l+ 2µ∗(x, p) ε∗(x, p)
(6.35)
pour appliquer le théorème de correspondance. C’est le cas, en particulier, de toutesles solutions classiques établies en élasticité linéaire pour un système constitué d’unmatériau homogène isotrope.
6.6.3 Paramètres de chargement et paramètres cinématiques
Dans le cas d’une évolution prescrite par des paramètres de chargement ou d’uneévolution prescrite par des paramètres cinématiques comme cela a été défini auxparagraphes 6.5.2 et 6.5.4, l’application du théorème de correspondance peut êtreexplicitée.
Histoire définie par des paramètres de chargement
Le problème d’équilibre élastique linéarisé homologue n’est autre que le problèmed’élasticité instantanée dont la réponse s’écrit, comme au chapitre I (§ 9.4.2) :
σ(x) = σél
j(x, 0)Qj
ε(x) = εél
j(x, 0)Qj
ξ(x) = ξél
j(x, 0)Qj
(6.36)
et
q = Λ(0).Q .(6.37)
L’application du théorème de correspondance s’exprime par le schéma :
(12)Sauf dans le cas du matériau isotrope, ce résultat nécessite la symétrie entre les groupes d’indices(i, j) et (h, k) de f∗ et r∗.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
6 – Évolutions viscoélastiques quasi-statiques 125
Équilibre élastique ⇒ Évolution viscoélastique
(6.38)
σ(x) = σél
j(x, 0)Qj
ε(x) = εél
j(x, 0)Qj
ξ(x) = ξél
j(x, 0)Qj
⇒
σ∗(x, p) = 〈σél
j〉(x, p)Q∗
j (p)
ε∗(x, p) = 〈 εél
j〉(x, p)Q∗
j (p)
ξ∗(x, p) = 〈 ξél
j〉(x, p)Q∗
j(p)
(6.39) q = Λ(0).Q ⇒ q∗(p) = 〈Λ 〉(p).Q∗(p)
Dans ce schéma les champs 〈σél
j〉(x, p), 〈 εél
j〉(x, p), 〈 ξél
j〉(x, p) et 〈Λ 〉(p) sym-
bolisent les expressions de σél
j(x, 0), εél
j(x, 0), ξél
j(x, 0) et Λ(0), de la solution du pro-
blème d’équilibre élastique linéaire homologue, écrites avec la loi de comportement(6.33) c’est-à-dire en y remplaçant f(x, 0) par f∗(x, p), et r(x, 0) par r∗(x, p).
Le « retour » aux originales, fonctions de t, exprime la solution du problèmed’évolution qui tend vers la solution à l’infini (13)
σ(x,∞) = 〈σél
j〉(x, 0)Qj(∞)
ε(x,∞) = 〈 εél
j〉(x, 0)Qj(∞)
ξ(x,∞) = 〈 ξél
j〉(x, 0)Qj(∞)
(6.40)
q(∞) = 〈Λ 〉(0).Q(∞)(6.41)
Histoire définie par des paramètres cinématiques
De la même façon, pour une évolution prescrite par des paramètres cinématiques,le thèorème de correspondance s’écrit, avec des notations semblables :
Équilibre élastique ⇒ Évolution viscoélastique
(6.42)
σ(x) = σél
k(x, 0) qk
ε(x) = εél
k(x, 0) qk
ξ(x) = ξél
k(x, 0) qk
⇒
σ∗(x, p) = 〈σél
k〉(x, p) q∗k(p)
ε∗(x, p) = 〈 εél
k〉(x, p) q∗k(p)
ξ∗(x, p) = 〈 ξél
k〉(x, p) q∗k(p)
(6.43) Q = A(0).q ⇒ Q∗(p) = 〈A 〉(p).q∗(p)
(13)On rappelle que ϕ∗(0) = ϕ(∞).

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
126 Chapitre II – Viscoélasticité linéaire tridimensionnelle
et la solution à l’infini
σ(x,∞) = 〈σél
k〉(x, 0) qk(∞)
ε(x,∞) = 〈 εél
k〉(x, 0) qk(∞)
ξ(x,∞) = 〈 ξél
k〉(x, 0) qk(∞) .
(6.44)
Q(∞) = 〈A 〉(0).q(∞) .(6.45)
6.7 Commentaires
Il est fréquent dans la pratique que, au moins pour une première analyse, les hypo-thèses permettant l’application des raisonnements de la section 6.5 soient satisfaites :homogénéité, isotropie, coefficient de Poisson constant ou problème ne dépendant qued’une fonction de retard ou de relaxation. Les règles pratiques (6.27) à (6.30) four-nissent alors formellement la solution du problème d’évolution au moyen de l’opérateurintégral (cf. section 8).
Hors de cette circonstance, pour un système constitué d’un matériau viscoélas-tique linéaire non-vieillissant, le théorème de correspondance fournit un moyen sys-tématique pour résoudre formellement un problème d’évolution à partir du problèmed’équilibre élastique homologue. On est ainsi ramené à de simples manipulations algé-briques sur les transformées des diverses fonctions, jusqu’à la phase finale d’inversionde la transformation pour le « retour » aux originales qui explicitent l’évolution enfonction du temps. La puissance de ce résultat est évidente puisqu’il permet de traitertout type de sollicitation dans le cadre d’hypothèses indiqué. Toutefois l’expériencepratique montre que le recours immédiat à la transformation de Carson, en raisonmême du caractère systématique des manipulations algébriques qu’il implique, risqued’occulter la compréhension mécanique du problème étudié en faisant perdre devue sa nature, notamment en ce qui concerne les données aux limites. En fait il estrecommandable dans tous les cas de poser et d’analyser le problème d’évolution envariables originales (x, t) de façon à bien préciser les phénomènes mécaniques mis enjeu avant d’appliquer le théorème de correspondance.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
7 – Barre cylindrique homogène 127
Exemples de mise en œuvre
7 Barre cylindrique homogène
7.1 Problématique
Le système étudié est une barre cylindrique d’axe Ox, de longueur ` et de sectionconstante S. L’origine O est le centre d’inertie géométrique de la section S0, dont lesaxes Oy et Oz sont les axes centraux d’inertie. La barre est homogène, constituéed’un matériau isotrope, viscoélastique linéaire, dont le comportement est défini, selonla commodité, par les diverses fonctions de retard et de relaxation introduites auparagraphe 4.2 : J(t0, t) et n(t0, t) ; λ(t0, t) et µ(t0, t) ; γ(t0, t) ; E(t0, t) et ν(t0, t).
Les problèmes considérés sont posés et résolus dans le cadre de l’hypothèse despetites perturbations. Il s’agit successivement de la traction-compression, de la flexionet de la torsion de la barre, qui n’est soumise à aucune autre sollicitation sur soncontour ou dans son volume. L’état de contrainte initial est supposé nul. La méthodesuivie met en œuvre des raisonnements semblables à ceux de la section 6.5 à partirde la réponse élastique instantanée.
On rappelle qu’en élasticité linéaire isotrope les solutions de ces problèmes sontobtenues en utilisant la méthode dite « semi-inverse » de Saint Venant et font appelau Principe de Saint Venant pour justifier leur utilisation lorsque les conditions d’ap-plication de la sollicitation dans les sections d’extrémités S0 et S` ne sont prescritesque sous la forme d’un torseur. Le même argument sera retenu ici.
Enfin, on sait l’importance de ces solutions élastiques en Résistance des maté-riaux : on retient pour loi de comportement de l’élément de milieu curviligne élastiquesoumis à une sollicitation de traction-compression, de flexion ou de torsion la réponseunitaire de la barre cylindrique soumise à la même sollicitation. On procédera de lamême façon en viscoélasticité linéaire.
7.2 Traction-compression
La sollicitation est définie par l’effort normal N(t) ex appliqué au centre de lasection S` et −N(t) ex appliqué au centre de S0 (figure 3). Il s’agit d’une sollicita-tion prescrite par un paramètre de chargement Q(t) auquel est associée la réponseobservable q(t), allongement de la barre :
Q(t) = N(t), q(t) = ξx(`, t) .(7.1)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
128 Chapitre II – Viscoélasticité linéaire tridimensionnelle
y `
N(t)
x
S`zS0
−N(t)
O
Figure 3 – Barre cylindrique sollicitée en traction-compression
La réponse élastique instantanée à l’instant t0 est classique :
σxx(x, t0) =1
SN(t0) autres σij(x, t0) = 0
εxx(x, t0) =1
SN(t0)J(t0, t0)
εyy(x, t0) = εzz(x, t0) =1
SN(t0)n(t0, t0)J(t0, t0)
(7.2)
Pour le problème d’évolution, on vérifie aisément que le champ homogène stati-quement admissible
σxx(x, t) =1
SN(t), autres σij(x, t) = 0(7.3)
et le champ de déformation homogène associé par la loi de comportement (4.11)
εxx(x, t) =1
S[ J (×)N ](t)
εyy(x, t) = εzz(x, t0) =1
S[ (nJ) (×)N ](t)
(7.4)
qui est géométriquement compatible, constituent la solution. Le champ de déplace-ment est :
ξx(x, t) =x
S[ J (×)N ](t)
ξy(x, t) = −y
S[ (nJ) (×)N ](t)
ξz(x, t) = −z
S[ (nJ) (×)N ](t)
(7.5)
La réponse observable unitaire de la barre estq(t)
`= ε(t) :
ε(t) =1
S[ J (×)N ](t) .(7.6)
Cette formule est adoptée comme loi de comportement de l’élément de milieucurviligne viscoélastique en traction-compression (cf. chapitre I, § 7.2.1) :
ε = J (×)N =1
S[ J (×)N ] .(7.7)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
7 – Barre cylindrique homogène 129
La formule inverse fait intervenir la fonction de relaxation en traction simpleE(t0, t) :
N = R (×) ε = S [E (×) ε ] .(7.8)
7.3 Flexion
y `
xS`
M(t)z
−M(t)
S0O
Figure 4 – Barre cylindrique sollicitée en flexion autour d’un axe principal d’inertie
La barre est soumise maintenant à la sollicitation définie par le moment de flexionM(t) ez appliqué sur la section S` et le moment −M(t) ez appliqué sur la section S0
(figure 4). Il s’agit encore d’une sollicitation prescrite par un paramètre de chargementQ(t) auquel est associée la réponse observable q(t), rotation relative autour de Oz dela section S` par rapport à la section S0 :
Q(t) = M(t), q(t) = ωz(`, t) .(7.9)
L’axe Oz étant axe central d’inertie de la section droite, la réponse élastiqueinstantanée à l’instant t0 s’écrit, en désignant par I le moment d’inertie géométriquecorrespondant :
σxx(x, t0) = −y
IM(t0) autres σij(x, t0) = 0
εxx(x, t0) = −y
IM(t0)J(t0, t0)
εyy(x, t0) = εzz(x, t0) =y
IM(t0)n(t0, t0)J(t0, t0)
(7.10)
La solution du problème d’évolution est constituée du champ statiquement admis-sible
σxx(x, t) = −y
IM(t) autres σij(x, t) = 0(7.11)
et du champ de déformation associé par la loi de comportement (4.11),
εxx(x, t) = −y
I[ J (×)M ](t)
εyy(x, t) = εzz(x, t) =y
I[ (nJ) (×)M ](t)
(7.12)
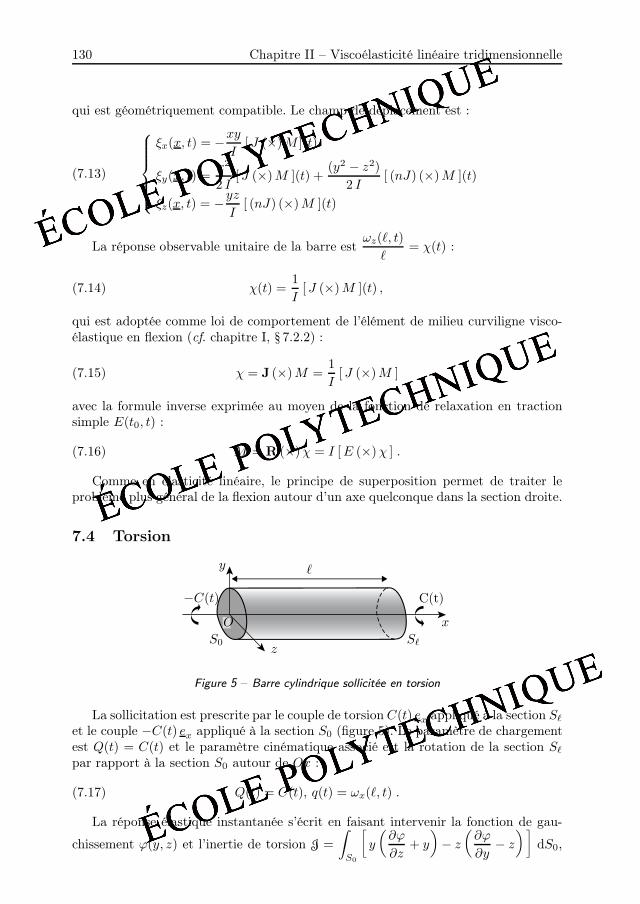
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
130 Chapitre II – Viscoélasticité linéaire tridimensionnelle
qui est géométriquement compatible. Le champ de déplacement est :
ξx(x, t) = −xy
I[ J (×)M ](t)
ξy(x, t) =x2
2 I[ J (×)M ](t) +
(y2 − z2)
2 I[ (nJ) (×)M ](t)
ξz(x, t) = −yz
I[ (nJ) (×)M ](t)
(7.13)
La réponse observable unitaire de la barre estωz(`, t)
`= χ(t) :
χ(t) =1
I[ J (×)M ](t) ,(7.14)
qui est adoptée comme loi de comportement de l’élément de milieu curviligne visco-élastique en flexion (cf. chapitre I, § 7.2.2) :
χ = J (×)M =1
I[ J (×)M ](7.15)
avec la formule inverse exprimée au moyen de la fonction de relaxation en tractionsimple E(t0, t) :
M = R (×)χ = I [E (×)χ ] .(7.16)
Comme en élasticité linéaire, le principe de superposition permet de traiter leproblème plus général de la flexion autour d’un axe quelconque dans la section droite.
7.4 Torsion
y `
C(t)
x
S`z
S0
−C(t)
O
Figure 5 – Barre cylindrique sollicitée en torsion
La sollicitation est prescrite par le couple de torsion C(t) ex appliqué à la section S`
et le couple −C(t) ex appliqué à la section S0 (figure 5). Le paramètre de chargementest Q(t) = C(t) et le paramètre cinématique associé est la rotation de la section S`
par rapport à la section S0 autour de Ox :
Q(t) = C(t), q(t) = ωx(`, t) .(7.17)
La réponse élastique instantanée s’écrit en faisant intervenir la fonction de gau-
chissement ϕ(y, z) et l’inertie de torsion J =
∫
S0
ï
y
Å
∂ϕ
∂z+ y
ã
− z
Å
∂ϕ
∂y− z
ãò
dS0,

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
7 – Barre cylindrique homogène 131
qui sont des caractéristiques géométriques de la section :
σyx(x, t0) = σxy(x, t0) =C(t0)
J
Å
∂ϕ
∂y− z
ã
σzx(x, t0) = σxz(x, t0) =C(t0)
J
Å
∂ϕ
∂z+ y
ã
autres σij(x, t0) nulles
(7.18)
et
ξx(x, t0) =C(t0)
µ(t0, t0) Jϕ(y, z) = γ(t0, t0)
C(t0)
Jϕ(y, z)
ξy(x, t0) = −C(t0)
µ(t0, t0) Jxz = −γ(t0, t0)
C(t0)
Jxz
ξz(x, t0) =C(t0)
µ(t0, t0) Jxy = γ(t0, t0)
C(t0)
Jxy
(7.19)
Pour la résolution du problème d’évolution on peut appliquer strictement le rai-sonnement du paragraphe 6.5.2 puisque seule la fonction de retard en cisaillementsimple intervient dans (7.19) : la solution s’écrit ainsi :
σyx(x, t) = σxy(x, t) =C(t)
J
Å
∂ϕ
∂y− z
ã
σzx(x, t) = σxz(x, t) =C(t)
J
Å
∂ϕ
∂z+ y
ã
autres σij(x, t) nulles
(7.20)
et
ξx(x, t) =ϕ(y, z)
J[ γ (×)C ](t)
ξy(x, t) = −xz
J[ γ (×)C ](t)
ξz(x, t) =xy
J[ γ (×)C](t)
(7.21)
La réponse unitaire de la barre en torsion estωx(`, t)
`= α(t) :
α(t) =1
J[ γ (×)C ](t),(7.22)
qui est adoptée comme loi de comportement de l’élément de milieu curviligne visco-élastique en torsion (cf. chapitre I, § 7.2.3) :
α = J (×)C =1
J[ γ (×)C ] ;(7.23)
formule inverse :
C = R (×)α = J [µ (×)α ] .(7.24)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
132 Chapitre II – Viscoélasticité linéaire tridimensionnelle
8 Convergence d’une cavité
8.1 Définition du problème
Le creusement d’une cavité ou d’une galerie dans un massif où règne un étatde précontrainte géologique provoque une modification de l’état de contrainte par« décompression » autour de la cavité en même temps que des déformations et desdéplacements instantanés et différés, d’où la « convergence » de la cavité ou de lagalerie. On s’intéressera ici au cas d’une cavité sphérique, les résultats obtenus étantaisément transposables pour une galerie cylindrique.
Le processus est schématisé de la façon suivante qui permet, par un traitement rela-tivement simple, de mettre en évidence les principaux aspects du problème en prenanten compte les comportements élastique et viscoélastique du matériau et l’éventuellemise en place d’un revêtement dans la cavité.
• Une cavité sphérique de centre O et de rayon a(t0) = a0 est creusée « instantané-ment » à l’instant t0 dans un massif infini, homogène, non pesant dans lequel régnaitjusqu’alors le champ de précontrainte géologique uniforme de pression isotrope :
σ(r, t) = −P 1l, ∀r, ∀t < t0 .(8.1)
• Un revêtement indéformable est éventuellement mis en place sans effort, « ins-tantanément » à l’instant t1.
• Le comportement du matériau constitutif du massif est viscoélastique linéaireisotrope.
• L’étude mécanique de ce processus schématique est effectuée, dans l’hypothèsedes petites perturbations, sur le système unique du massif infini avec cavitéde rayon a0, soumis à la superposition de quatre histoires de sollicitationsimposées à l’infini et au pourtour de la cavité.
8.2 État de précontrainte géologique
L’histoire « zéro » est définie par les sollicitations suivantes au contour du sys-tème(14) :
σ0rr(a0, t) = −P, σ0
θr(a0, t) = σ0ϕr(a0, t) = 0
σ0rr(∞, t) = −P, σ0
θr(∞, t) = σ0ϕr(∞, t) = 0
(8.2)
Au moment du creusement de la cavité cette histoire est établie depuis suf-fisamment longtemps pour que, au regard de l’échelle de temps des phénomènesliés au creusement de la cavité, les déformations et déplacements différés qui luicorrespondent puissent être considérés comme stabilisés. L’état de contrainte estle champ (8.1) et, en prenant cet état stabilisé comme référence, le champ de
(14)Coordonnées sphriques de centre O.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
8 – Convergence d’une cavité 133
déplacement est nul.
σ0(r, t) = −P 1l, r ≥ a0
ξ0(r, t) = 0, r ≥ a0
(8.3)
8.3 Réponse instantanée au creusement de la cavité
σ0rr(a0, t)
σ0 = −P 1l
σ1rr(a0, t)
σ1(∞, t) = 0
Figure 6 – Histoires « zéro » et « un »
Le creusement de la cavité correspond à la superposition à l’histoire « zéro » del’histoire « un » définie par les sollicitations au contour :
σ1rr(a0, t) = P Yt0(t), σ
1θr(a0, t) = σ1
ϕr(a0, t) = 0
σ1rr(∞, t) = σ1
θr(∞, t) = σ1ϕr(∞, t) = 0
(8.4)
La réponse instantanée à l’instant t0 correspond à l’élasticité instantanée du ma-tériau à cet instant. Elle fait appel à la solution classique en élasticité linéaire isotropedu problème de l’enveloppe sphérique sous pressions intérieure et extérieure quandle rayon extérieur tend vers l’infini. Le champ de déplacement instantané est radial.Le déplacement sur la frontière de la cavité et l’état de contrainte dans le massifs’écrivent ainsi :
ξ1r (a0, t0) = −a0 σ1rr(a0, t0)
1
4µ(t0, t0)= a0 P
1
4µ(t0, t0)
σ1rr(r, t0) =
(a0
r
)3
σ1rr(a0, t0), σ
1θθ(r, t0) = σ1
ϕϕ(r, t0) = −1
2σ1
rr(r, t0)
(8.5)
Il en résulte que l’état de contrainte dans le massif à l’instant t+0 est :
σ(r, t) = −P 1l+ P(a0
r
)3
er ⊗ er −P
2
(a0
r
)3
(eθ ⊗ eθ + eϕ ⊗ eϕ)(8.6)
8.4 Réponse différée au creusement de la cavité
Le problème est évidemment du type « retard ». On peut appliquer le mêmeraisonnement qu’au paragraphe 6.5.1. Il convient pour cela d’écrire (8.5) en faisant

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
134 Chapitre II – Viscoélasticité linéaire tridimensionnelle
apparaître la fonction de retard du matériau en cisaillement simple γ(t0, t) telle que
µ⊗ γt0 = Yt0 .(8.7)
Ainsi, dans (8.5), ξ1r (a0, t0) se met sous la forme :
ξ1r (a0, t0) = −a0 σ1rr(a0, t0)
γ(t0, t0)
4= a0 P
γ(t0, t0)
4
σ1rr(r, t0) =
(a0
r
)3
σ1rr(a0, t0), σ
1θθ(r, t0) = σ1
ϕϕ(r, t0) = −1
2σ1
rr(r, t0)
(8.8)
Par le même raisonnement qu’au paragraphe 6.5.1 on en déduit, pour le problèmed’évolution pour t ≥ t0 :
ξ1r (a0, t) = ξ1r (a0, t0)γ(t0, t)
γ(t0, t0)
σ(r, t) = σ(r, t0)
(8.9)
Le champ de contrainte est invariable et le déplacement radial de convergenceévolue comme la fonction de retard en cisaillement simple du matériau.
8.5 Mise en place d’un revêtement de soutènement
La mise en place sans effort, instantanément, à l’instant t1 > t0, d’un revêtementindéformable dans la cavité signifie qu’à partir de cet instant la convergence de lacavité est bloquée. Cette opération est modélisée par la superposition de deux histoiressupplémentaires aux deux histoires précédentes :
• Histoire « deux » définie par les sollicitations au contour :
σ2rr(a0, t) = −P Yt1(t), σ
2θr(a0, t) = σ2
ϕr(a0, t) = 0
σ2rr(∞, t) = σ2
θr(∞, t) = σ2ϕr(∞, t) = 0
(8.10)
• Et histoire « trois » définie par l’histoire du déplacement ξ3r (a0, t) sur la frontièrer = a0 et l’histoire de la contrainte à l’infini qui est maintenue nulle. Cette histoire deξ3r (a0, t) est déterminée en écrivant que, pour t > t1, le déplacement radial ξr(a0, t)demeure égal à sa valeur pour t = t1, qui n’est autre que ξr(a0, t1) = ξ1r (a0, t1). D’où :
ξr(a0, t) = ξ1r (a0, t) + ξ2r (a0, t) + ξ3r (a0, t) = ξ1r (a0, t1) pour t ≥ t1(8.11)
soit
ξ3r (a0, t) = ξ1r (a0, t1) − ξ1r (a0, t) − ξ2r (a0, t) pour t ≥ t1 .(8.12)
On en déduit, compte tenu de (8.9) et (8.10), pour définir l’histoire « trois » :
ξ3r (a0, t) = −a0P
4[ γ(t0, t1) − γ(t0, t) + γ(t1, t) ]Yt1(t)
σ3θr(a0, t) = σ3
ϕr(a0, t) = 0(8.13)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
8 – Convergence d’une cavité 135
σ2rr(a0, t)
σ2(∞, t) = 0
ξ3r (a0, t)
σ3(∞, t) = 0
Figure 7 – Histoires « deux » et « trois »
Cette histoire correspond à un problème prescrit par un paramètre cinématique,auquel sont applicables les raisonnements du paragraphe 6.5.4. La réponse du pointde vue de la contrainte σ3
rr(a0, t) s’obtient en transposant et en explicitant (6.29) dansle cas présent ; il vient ainsi :
σ3rr(a0, t) = P γ(t0, t1)µt1(t) − P [µ (×) (γt0Yt1 − γt1) ](t) .(8.14)
Du point de vue pratique il est important de connaitre l’évolution de la pressionexercée par le massif sur le revêtement après sa pose (t ≥ t1), soit :
ω(a0, t) = −σrr(a0, t) = −[σ0rr(a0, t) + σ1
rr(a0, t) + σ2rr(a0, t) + σ3
rr(a0, t) ]Yt1(t) ;
(8.15)
On obtient ainsi, pour t ≥ t1 :
ω(a0, t) = P − P γ(t0, t1)µ(t1, t) + P [µ (×)(γt0Yt1 − γt1) ](t)(8.16)
où l’on vérifie que ω(a0, t+1 ) =0.
ω(a0, t)
σ0 = −P 1l
Figure 8 – Pression sur le revêtement
En particulier, si l’on peut considérer, compte tenu des temps caractéristiques desphénomènes, que la pose instantanée du revêtement est immédiate après l’ouvertureinstantanée de la cavité, c’est-à-dire que t1 = t+0 , l’équation (8.16) prend la formeexplicite simple (8.17) qui montre que l’évolution de la pression sur le revêtement suitla fonction de relaxation en cisaillement simple :
ω(a0, t) = P
Å
1 −µ(t0, t)
µ(t0, t0)
ã
(8.17)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
136 Chapitre II – Viscoélasticité linéaire tridimensionnelle
Cet exemple montre que l’utilisation de l’opérateur intégral permet, hors de l’hypo-thèse de non-vieillissement et de l’utilisation de la transformation de Laplace-Carson,d’aboutir à la résolution explicite de problèmes où l’histoire de sollicitation est re-lativement complexe en en pénétrant la compréhension mécanique. Il montre aussicomment, pour les problèmes concernant le matériau isotrope dont la solution ne faitintervenir qu’une seule fonction de retard ou de relaxation, on peut mettre en œuvredes raisonnements semblables à ceux de la section 6.5.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Récapitulatif des formules essentielles 137
Récapitulatif des formules essentielles
• Matrices de Retard et de Relaxation
σ(t) = σ0 Y(t0)(t)
ε(t) = J(t0, t) : σ0, ∀σ0
• Formules de Boltzmann
ε(t) = J(t, t) : σ(t) −
∫ t
t0
∂J
∂τ(τ, t) : σ(τ) dτ
σ(t) = R(t, t) : ε(t) −
∫ t
t0
∂R
∂τ(τ, t) : ε(τ) dτ
σF7−→ ε = − <
∂J
∂τ(:)σ >= J (× :)σ
εR7−→σ = − <
∂R
∂τ(:) ε >= R (× :) ε
J t0 = J (×)Yt0
Rt0 = R (×)Yt0
R (× :)J t0 = 1lYt0
J (× :)Rt0 = 1lYt0
<∂J
∂τ(:)
∂Rt0
∂t0>=<
∂R
∂τ(:)
∂J t0
∂t0>= 1l δt0 .

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
138 Chapitre II – Viscoélasticité linéaire tridimensionnelle
• Matériau isotrope
σF7−→ε = [ (1 + n)J ] (×)σ − [nJ ] (×) [ tr σ ] 1l
εR7−→σ = λ (×) [ tr ε ] 1l+ 2µ (×) ε
[ (1 + n)J ] (×) 2µt0 = γ (×)µt0 = Yt0
[ (1 − 2n)J ] (×) (3λt0 + 2µt0) = Yt0
« Relaxation en traction simple »
εxx(t) = ε0 Yt0(t)
σij(t) = 0, i 6= x, j 6= x
σxx(t) = ε0Et0(t)
νt0(t) = −Yt0
εyy(t)
ε0
J (×)Et0 = Yt0
νt0 = (nJ) (×)Et0
• Matériau non-vieillissant
J(t0, t) = f(t− t0)
R(t0, t) = r(t− t0)
σF7−→ε = f ′ (∗ :)σ = f (∗ :)σ′
εR7−→σ = r′ (∗ :) ε = r (∗ :) ε′
f(0) : r(0) = 1l
f(∞) : r(∞) = 1l
ε∗(p) = f∗(p) : σ∗(p)
σ∗(p) = r∗(p) : ε∗(p)
f∗(p) : r∗(p) = 1l
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Récapitulatif des formules essentielles 139
Matériaux isotropes
σF7−→ ε = [(1 + n)J ] ∗ σ′ − [nJ ] ∗ [ tr σ′ ] 1l
εR7−→σ = λ ∗ [ tr ε′ ] 1l+ 2µ ∗ ε′
ε∗ =1 + ν∗
E∗σ∗ −
ν∗
E∗[ tr σ∗ ] 1l
σ∗ = λ∗[ tr ε∗ ] 1l+ 2µ∗ ε∗
2µ∗ =1
[ (1 + n)J ]∗(3λ∗ + 2µ∗) =
1
[ (1 − 2n)J ]∗
J∗ =1
E∗(nJ)∗ =
ν∗
E∗
• Évolution quasi-statique
Sξi∩ STi
= ∅, Sξi∪ STi
= ∂Ω
ξi(x, t) = ξdi (x, t) sur Sξi
Ti(x, t) = T di (x, t) sur STi
div σ(x, t) + ρ F (x, t) = 0
ε(x, t) =1
2[ grad ξ(x, t) +t grad ξ(x, t) ]
ε(x, t) = [ J (× :)σ ](x, t)
σ(x, t) = [R (× :) ε ](x, t)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
140 Chapitre II – Viscoélasticité linéaire tridimensionnelle
Coefficient de Poisson constant
ε(x, t) = J (×) [ (1 + ν)σ − ν(tr σ) 1l ] (x, t)
Paramètres de chargement
σ(x, t0) = σél
j(x)Qj(t0)
ε(x, t0) = εélj(x)Jt0(t0)Qj(t0)
ξ(x, t0) = ξélj(x)Jt0(t0)Qj(t0)
⇒
σ(x, t) = σél
j(x)Qj(t)
ε(x, t) = εélj(x)[ J(×)Qj ](t)
ξ(x, t) = ξélj(x)[ J(×)Qj ](t)
q(t0) = qéljJt0(t0)Qj(t0) ⇒ q(t) = qél
j[ J(×)Qj ](t)
Paramètres cinématiques
σ(x, t0) = σél
k(x)Et0(t0) qk(t0)
ε(x, t0) = εélk(x) qk(t0)
ξ(x, t0) = ξélk(x) qk(t0)
⇒
σ(x, t) = σél
k(x) [E(×) qk ](t)
ε(x, t) = εélk(x) qk(t)
ξ(x, t) = ξélk(x) qk(t)
Q(t0) = Qél
kEt0(t0) qk(t0) ⇒ Q(t) = Qél
k[E(×) qk ](t)
Matériau non vieillissant
Sξi∩ STi
= ∅, Sξi∪ STi
= ∂Ω
ξ∗i (x, p) = [ ξdi ]∗(x, p) sur Sξi
T ∗i (x, p) = [T d
i ]∗(x, p) sur STi
div σ∗(x, p) + ρF ∗(x, p) = 0
ε∗(x, p) =1
2[ grad ξ∗(x, p) +t grad ξ∗(x, p)]
ε∗(x, p) = f∗(x, p) : σ∗(x, p)
σ∗(x, p) = r∗(x, p) : ε∗(x, p)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Récapitulatif des formules essentielles 141
Paramètres de chargement
σ(x, t) = σél
j(x, 0)Qj
ε(x, 0) = εél
j(x, 0)Qj
ξ(x, 0) = ξél
j(x, 0)Qj
⇒
σ∗(x, p) = 〈σél
j〉(x, p)Q∗
j (p)
ε∗(x, p) = 〈 εél
j〉(x, p)Q∗
j(p)
ξ∗(x, p) = 〈 ξél
j〉(x, p)Q∗
j(p)
q(0) = Λ(0).Q ⇒ q∗(p) = 〈Λ 〉(p).Q∗(p)
σ(x,∞) = 〈σél
j〉(x, 0)Qj(∞)
ε(x,∞) = 〈 εél
j〉(x, 0)Qj(∞) q(∞) = 〈Λ 〉(0).Q(∞)
ξ(x,∞) = 〈 ξél
j〉(x, 0)Qj(∞)
Paramètres cinématiques
σ(x, 0) = σél
k(x, 0) qk
ε(x, 0) = εél
k(x, 0) qk
ξ(x, 0) = ξél
k(x, 0) qk
⇒
σ∗(x, p) = 〈σél
k〉(x, p) q∗k(p)
ε∗(x, p) = 〈 εél
k〉(x, p) q∗k(p)
ξ∗(x, p) = 〈 ξél
k〉(x, p) q∗k(p)
Q(0) = A(0).q ⇒ Q∗(p) = 〈A 〉(p).q∗(p)
σ(x,∞) = 〈σél
k〉(x, 0) qk(∞)
ε(x,∞) = 〈 εél
k〉(x, 0) qk(∞) Q(∞) = 〈A 〉(0).q(∞)
ξ(x,∞) = 〈 ξél
k〉(x, 0) qk(∞)

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Bibliographie
biot, m. (1954) – Theory of stress-strain relations in anisotropic viscoelasticity andrelaxation phenomena. J. Appl. Phys., 25, 11, 1385-1391.
biot, m. (1956) – Thermoelasticity and irreversible thermodynamics. J. Appl. Phys.,27, 3, 240-253.
bland, d. r. (1960) – The theory of Linear Viscoelasticity. Pergamon Press,New York.
boltzmann, l. (1874) – Zur Theorie der elastischen Nachwirkung. Sitzber. Kaiserl.Akad. Wiss. Wien, Math.- Naturw. Kl., 70, 275-306.
bouleau, n. (1988) – Processus stochastiques et applications. Hermann, Paris.
bouleau, n. (1999) – Visco-élasticité et Processus de Lévy. J. Pot. Anal., 11, 13,289-302.
brun, l. (1969) – Méthodes énergétiques dans les systèmes mécaniques. I, II.J. Mécanique, 8, 1, 125-192.
brun, l. (1992) – Énergétique et modélisation du comportement thermomécanique.École polytechnique.
coleman, b.d. & noll, w. (1961) – Foundations of linear viscoelasticity. Rev. Mod.Phys., 33, 239-249.
coleman, b.d. (1964) – Thermodynamics of materials with memory. Arch. Rat.Mech. Anal., 17, 1-46.
coleman, b.d. (1964) – On thermodynamics, strain impulses and viscoelasticity.Arch. Rat. Mech. Anal., 17, 230-254.
coleman, b.d. & owen, d.r. (1974) – A mathematical foundation for thermodyna-mics. Arch. Rat. Mech. Anal., 54, 1-104.
day, w.a. (1971) – Restrictions on relaxation functions in linear viscoelasticity. Quart.Appl. Math., 24, 487-497.
143

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
144 Bibliographie
edelstein, w.s. (1966) – Existence of solutions to the displacement problem forquasistatic viscoelasticity. Arch. Rat. Mech. Anal., 22, 2, 121-128.
eirich, f.r. (1956 - 1967) – Rheology : Theory and Applications, Academic Press,New York.
fabrizio, m. & morro,a.(1985) – Thermodynamic restrictions on relaxation func-tions in linear viscoelasticity. Mech. Res. Comm., 12, 101-105.
fabrizio, m. & morro,a. (1988) – Viscoelastic relaxation functions compatible withthermodynamics. J. Elasticity, 19, 63-75.
fabrizio, m. & morro,a. (1992) – Mathematical Problems in Linear Viscoelasticity.Series in Applied and Numerical Mathematics, SIAM.
françois, d., pineau, a. & zaoui, a. (1991, 1993) – Comportement mécanique desmatériaux. Hermès, Paris.
graffi, d. (1928) – Sui problemi della ereditarietà lineare. Nuovo Cimento, 5, 53-71.
germain, p. (1986) – Mécanique, Ellipses, Paris.
gurtin, m.e. & sternberg, e. (1962) – On the linear theory of viscoelasticity. Arch.Rat. Mech. Anal., 11, 4, 291-356.
lanchon, h., cessenat, M., gervat, a. & kavenoky, a. (2000) – Physicalexamples. In Mathematical Analysis and numerical methods for science and Tech-nology, dautray, r. & lions, j-l. ed., vol. I., Springer-Verlag, Berlin, Heidelberg,New York.
lee, e.h. (1955) – Stress in viscoelastic bodies. Quart. Appl. Math., 13, 2, 183.
lee, e.h. & radok j.r.m. (1960) – The contact problem for viscoelastic bodies.Trans. ASME, J. Appl. Mech., 27, 438-444.
lemaitre, j. & chaboche, j-l. (1985) – Mécanique des matériaux solides. Dunod,Paris.
lu, h., zhang, x. & knauss, w.g. (1997) – Uniaxial, shear, and Poisson relaxa-tion and their conversion to bulk relaxation : Studies on poly(methyl methacry-late). Polym. Eng.Sci., 37, 1053-1064.
mandel, j. (1955) – Sur les corps viscoélastiques linéaires à comportement linéaire.C.R. Ac. Sc. Paris, 241, 1910-1912.
mandel, j. (1958) – Sur les corps viscoélastiques linéaires dont les propriétés dé-pendent de l’âge. C.R. Ac. Sc. Paris, 247, 175-178.
mandel, j. (1966) – Mécanique des milieux continus, Tome 2. Gauthier Villars, Paris.
mandel, j. (1969) – Aperçu sur les principaux comportements rhéo-logiques. La rhéologie, persoz, b. éd., Masson, Paris, 1-17.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Bibliographie 145
mandel, j. (1974) – Un principe de correspondance pour les corps viscoélastiqueslinéaires vieillissants. C.R. Symp. IUTAM ‘Mechanics of Visco-elastic mediaand bodies’, Göteborg, hult, j. ed., Springer-Verlag, pp. 44-55.
mandel, j. (1974) – Introduction à la mécanique des milieux continus déformables.Éditions scientifiques de Pologne, Varsovie.
mandel, j. (1978) – Propriétés mécaniques des matériaux. Eyrolles, Paris.
mase, g.e. (1970) – Theory and Problems of Continuum Mechanics, Schaum’s outlineseries. Mc Graw-Hill, New York.
morro, a. & fabrizzio, m. (1987 ) – On uniqueness in linear viscoelasticity : afamily of counterexamples. Quart. Appl. Math., 45, 321-325.
onsager, l. (1968) – The motion of ions : principles and concepts. Nobel Lecture.
persoz, b. (1969) – La rhéologie. Masson, Paris.
pierrard, j. m. (1969) – Modèles et fonctions visco-élastiques linéaires. La rhéologie,persoz, b. éd., Masson, Paris, 19-44.
radenkovic, d. (1969) – Généralisation à l’espace tridimensionnel. Visco-élasticitélinéaire. Plasticité classique. La rhéologie,persoz, b. éd., Masson, Paris, 73-88.
ramesh kumar m. v. & narasimhan., r (2004) – Analysis of spherical indentationof linear viscoelastic materials. Current Sciences, 87, 8, 1088-1095.
salençon, j. (1983) – Viscoélasticité. Presses de l’ENPC, Paris.
salençon, j. (2001) – Handbook of Continuum Mechanics. Springer, Berlin, Heidel-berg, New-York.
salençon, j. (2002) – de l’Élasto-plasticité au calcul à la rupture. Les éditions del’École polytechnique & Ellipses diffusion, Paris.
salençon, j. (2007) – Mécanique des milieux continus, Tome 2. Les éditions de l’Écolepolytechnique & Ellipses diffusion, Paris.
thual, o. (1997) – Introduction à la mécanique des milieux continus déformables.Cépaduès éditions, Toulouse.
vinh tuong, n.p. (1969) – Vibrations stationnaires et non stationnaires des corpsvisco-élastiques. Détermination des modules complexes. La rhéologie, persoz, b.éd., Masson, Paris, 89-135.
volterra, v. (1905) – Sulli equazioni integro-differentiale. Atti della Reale Accademiadei Lincei, 18, 1, 167.
volterra, v. (1912) – Sur les équations intégro-différentielles et leurs applications.Acta Mathem., 35, 295-356.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
146 Bibliographie
wang, c.c. (1970) – A new representation theorem for isotropic functions. Parts I &II. Arch. Rat. Mech. and Analysis, 36, 1970, 162-223 ; corrigendum, 43, 1971,392-395.
wineman, a.s. & pipkin, a.c. (1964) - Material symmetry restrictions onconstitutive equations.Arch. Rat. Mech. and Analysis, 17, 184-214.
ziegler, f. (1991) – Mechanics of Solids and Fluids. Springer-Verlag, Vienna.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Glossaire français-anglais 147
Glossaire français-anglais
Français English
Accélération AccelerationAccommodation AccommodationAmortisseur Damper, dashpotAngle de perte Loss angleAnisotrope AnisotropicAnisotropie Anisotropy
Champ de contrainte Stress fieldChamp de déformation Strain fieldCinématique Kinematic(al)Cinématique (La) KinematicsCisaillement ShearCoefficient de frottement intérieur Specific lossContrainte StressContrainte de cisaillement Shear stressContrainte de traction Tensile stressContrainte normale Normal stressComplaisance ComplianceCourbure Curvature
Décharge UnloadingDéformation StrainDéformation (vitesse de ) Strain rateDéformation différée Retarded (delayed) deformationDéphasage Phase shift
Élasticité ElasticityExpérience de retard Creep experimentExpérience de relaxation Relaxation experimentExpérience de recouvrance Recovery experiment
Flexion BendingFluage CreepFonction de gauchissement Warping functionFonction de retard Retardation functionFonction de relaxation Relaxation function
Gauchissement Warping
Hyperstatique Hyperstatic, statically indeterminateHypostatique Hypostatic, geometrically unstable

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
148 Glossaire français-anglais
Inconnue hyperstatique Redundant unknownInstantané (comportement) Instantaneous (behaviour)Isotropie IsotropyIsotrope Isotropic
Matériau vieillissant Ageing materialModèle rhéologique Rheological modelModule élastique Elastic modulusModule complexe Complex modulusMoment de flexion, moment fléchissant Bending momentMoment de torsion Torque
Paramètre cinématique Kinematic(al) parameterParamètre de chargement Loading parameterPoutre BeamPoutre console Cantilever beamPrécontrainte PrestressingPrincipe de superposition Superposition principleProduit contracté Contracted productProduit scalaire Scalar (dot) productProduit tensoriel Tensor product
Raideur StiffnessRecouvrance RecoveryRelaxation RelaxationRésistance des matériaux Strength of materialsRessort SpringRésultante Resultant
Statique (La) Statics
Taux de contrainte Stress rateTaux de déformation Strain rateTenseur TensorTorseur WrenchTorsion TorsionTransformée de Laplace (Carson) Laplace (Carson) transform
Vieillissement AgeingViscoélasticité Viscoelasticity

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Index alphabétique 149
Index alphabétique
AAccommodation, I.8.2.
ÂgeDifférence d’–, I.2.3 ; I.11.4.
Amortisseur, I.1 ; I.6.
Angle de perte, I.8.2.
BBéton, I.1.
Comportement du –, I.4.2 ; I.5.1 ; I.5.2 ; I.6.4 ;I.10.3 ; I.11.4.
boltzmann
Formule(s) de –, I.4.3 ; I.4.4 ; I.5.3 ; II.3.3 ;II.4.2 ; II.5.2 ; II.5.4 ; II.5.5.
Opérateur de –, I.5.3 ; I.9.3 ; I.11.2 ; II.6.4.Principe de superposition de –, I.3.1 ; I.4.1 ;
I.4.2 ; I.4.3 ; I.7.2 ; I.9.2 ; I.9.3 ; I.11.3 ;II.3.1 ; II.6.4 ; II.6.5 ; II.7.2 ; II.8.1 ; II.8.3 ;II.8.5.
BoltzmannienMatériau –, I.3 ; II.3.1.
Ccarson
Transformation de –, I.5.3 ; I.6 ; I.8.2 ; I.8.3 ;I.9.4 ; II.5.3 ; II.5.4 ; II.6.6 ; II.6.7 ; II.8.5.
Cavité, I.8.
Chargement– uniaxial, I.2.6 ;Paramètre(s) de –, I.9.3 ; I.9.4 ; I.11 ; II.6.5 ;
II.6.6 ; II.7.
Cinématique(s)Paramètre(s) –, I.9.3 ; I.9.4 ; II.11.3 ; II.6.5 ;
II.6.6.
Complaisance– « à l’infini », I.5.3 ; I.6.4 ; I.6.5.– élastique, I.4.3 ; I.4.4 ; I.5.3 ; I.6.4 ; I.6.5 ;
I.9.3 ; II.3.2 ; II.3.3 ; II.4.2 ; II.5.5 ; II.6.5.Matrice de – élastique, II.6.5.
Comportement– « à l’infini », I.4.2 ; I.11.3 ; II.5.2 ; II.5.4 ;– « différé », I.1 ; I.2 ; I.4.2 ; I.4.3 ; I.4.4 ;
I.6.4 ; I.10.2 ; I.11.1 ; I.11.3.– « du béton », I.4.2 ; I.5.1 ; I.5.2 ; I.6.4 ;
I.10.3 ; I.11.4.– instantané, I.2.1 ; I.2.6 ; I.4.1 ; I.6.1.
Convolution, I.5.3 ; II.5.2 ; II.5.4.
Correspondance– fonctionnelle, I.3 ; I.4.3 ; I.4.4 ; II.3 ; II.4.2 ;
II.6.4.Théorème de –, I.9.4 ; II.5.1 ; II.6.6.
DDécharge, I.2.4 ; I.2.6 ; I.4.2.
Dénivellation– d’appui, I.11.3.
DifféréComportement –, I.1 ; I.2 ; I.4.2 ; I.4.3 ; I.4.4 ;
I.6.4 ; I.10.2 ; I.11.1 ; I.11.3.
dirac
Mesure de –, I.4.3.
DistributionsThéorie des –, I.4.3 ; I.4.4 ; I.5.3 ; II.5.2.
EEffacement, I.2.4 ; I.2.6 ; I.4.2 ; I.6 ; I.8.2.
Expériences cruciales, I.2.6.
FFlexion, I.7.2 ; I.11 ; II.5.5 ; II.7.1 ; II.7.3.
Fluage, I.1 ; I.2.1 ; I.2.3 ; I.11.2 ; I.11.3 ; II.5.5.
Frottement intérieur, I.8.2.
GGauchissement
Fonction de –, II.7.4.
HHarmonique
Essai –, I.8 ;Régime – asymptotique, I.8.2 ; I.8.3.
heaviside
Fonction de –, I.2.1.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
150 Index alphabétique
HyperstatiqueStructure –, I.1 ; I.11.3 ; I.11.4.
Hypothèse des petites perturbations, I.1 ; I.9.1 ;I.9.2 ; I.9.4 ; I.11.1 ; I.11.3 ; II.2.1 ; II.4.1 ;II.6.2 ; II.6.3 ; II.6.4 ; II.6.6 ; II.7.1 ; II.8.1.
IInstantané
Comportement –, I.2.1 ; I.2.6 ; I.4.1 ; I.6.1.
IsostatiqueStructure –, I.1 ; I.11.2 ; I.11.3.
Isotropie, I.7.2 ; II.3.2 ; II.4 ; II.5.4 ; II.5.5 ; II.6.5 ;II.6.6 ; II.6.7 ; II.7.1 ; II.8.1 ; II.8.3 ; II.8.5.
kkelvin
Modèle de –, I.6.3 ; I.6.5.Solide de – Voigt, I.6.4.
Llaplace
Transformation de –, I.5.3 ; I.6 ; I.8.2 ; I.8.3 ;I.9.4 ; II.5.3 ; II.5.4 ; II.6.6 ; II.6.7 ; II.8.5.
lee
Théorème de –, I.9.4 ; II.5.1 ; II.6.6.
Mmandel
Théorème de lee et –, I.9.4 ; II.5.1 ; II.6.6.
Matériau– Boltzmannien, I.3 ; II.3.1.– non-vieillissant, I.4.1 ; I.5.1 ; I.5.2 ; I.5.3 ;
I.6.1 ; I.6.4 ; I.8.1 ; I.9.4 ; I.11.4 ; II.5 ;II.6.6 ; II.8.5.
Modèle(s)– de Kelvin, I.6.3 ; I.6.5.– de Kelvin-Voigt, I.6.4.– de Zener, I.6.4.– rhéologiques, I.6.
Module– « à l’infini », I.5.3 ; I.6.4.– complexe, I.8.– élastique instantané, I.4.4 ; I.5.3 ; I.6.5 ;
I.9.3 ; II.6.5.Matrice de – élastique, II.6.5.
NNon-vieillissant
Matériau –, I.4.1 ; I.5.1 ; I.5.2 ; I.5.3 ; I.6.1 ;I.6.4 ; I.8.1 ; I.9.4 ; I.11.4 ; II.5 ; II.6.6 ;II.8.5.
Oonsager
Principe d’ –, II.5.5.
OpérationnelCalcul –, I.5.3.Module –, I.5.3 ; I.6.5 ; II.5.3.
PParamètre(s)
– cinématiques, I.9.3 ; I.9.4 ; I.11 ; II.6.5 ;II.6.6.
– de chargement, I.9.3 ; I.9.4 ; I.11 ; II.6.5 ;II.6.6 ; II.7.
Petites perturbationsHypothèse des –, I.1 ; I.9.1 ; I.9.2 ; I.9.4 ;
I.11.1 ; I.11.3 ; II.2.1 ; II.4.1 ; II.6.2 ; II.6.3 ;II.6.4 ; II.6.6 ; II.7.1 ; II.8.1.
poisson
Coefficient de –, II.4.2 ; II.5.4 ; II.5.5 ; II.6.5 ;II.6.6 ; II.6.7.
Précontrainte, I.1 ; I.10 ; I.11.3 ; II.8.1 ; II.8.2.
Principe– d’onsager, II.5.5.– de superposition, I.3.1 ; I.4.1 ; I.4.2 ; I.4.3 ;
I.7.2 ; I.9.2 ; I.9.3 ; I.11.3 ; II.3.1 ; II.6.4 ;II.6.5 ; II.7.2 ; II.8.1 ; II.8.3 ; II.8.5.
RRéaction
– compensatrice, I.11.3.– hyperstatique, I.11.3. Recouvrance, I.2.4 ;
I.2.6 ; I.4.1 ; I.4.2 ; I.5.3 ; I.6.
Redistribution des efforts, I.1 ; I.11.3 ; I.11.4.
Relaxation– en cisaillement simple, II.4.2 ; II.8.5.– en compression isotrope, II.4.2.– en extension simple, II.4.2.– en « traction simple », II.1 ; II.4.2 ; II.6.5 ;
II.7.2 ; II.7.3.Expérience de –, I.2.2 ; I.2.3 ; I.2.4 ; I.5.3 ;
II.2.3 ; II.3.2 ; II.3.3 ; II.4.2 ; II.5.5.Fonction de –, I.2.2 ; I.2.3 ; I.4.2 ; I.4.3 ;
I.5.3 ; I.6 ; I.7.1 ; I.9.1 ; I.10.2 ; I.10.3 ;I.11.3 ; II.4.2 ; II.6.5 ; II.7.2 ; II.7.3 ; II.8.5.
Matrice de –, II.3.2 ; II.3.3 ; II.4.1.Temps caractéristique de –, I.2.3 ; I.6.2 ;
I.6.4 ; I.6.5 ; I.8.3 ; I.9.1 ; I.10.3 ; II.8.5.

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Index alphabétique 151
ReprésentationThéorème de –, II.4.2.
Ressort, I.6.
Retard-- en cisaillement simple, I.7.2 ; II.4.2 ;
II.7.4 ; II.8.4.-- en compression isotrope, II.4.2.-- en traction simple, I.2.1 ; I.7.1 ; I.7.2 ;
II.1 ; II.2.2 ; II.4.2 ; II.5.5 ; II.6.5.Expérience de –, I.2.1 ; I.2.3 ; I.2.4 ; I.4.2 ;
I.4.3 ; I.7.1 ; II.1 ; II.2.2 ; II.3.2 ; II.3.3 ;II.4.2 ; II.5.5 ;
Fonction de –, I.2.1 ; I.4.2 ; I.5.3 ; I.6 ; I.7.1 ;I.7.2 ; I.9.1 ; I.10.2 ; I.10.3 ; I.11.4 ; II.4.2 ;II.5.5 ; II.6.5 ; II.7.4 ; II.8.4 ; II.8.5.
Matrice de –, II.3.2 ; II.3.3 ; II.4.1.Temps caractéristique de –, I.2.3 ; I.6.3 ;
I.6.4 ; I.6.5 ; I.8.3 ; I.9.1 ; I.10.3 ; II.8.5.
riemann
Convolution de –, I.5.3 ; II.5.2 ; II.5.4.
SSolide linéaire standard, I.6.4 ; I.6.5 ; I.8.3 ;
I.10.3.
stieltjes
Intégrale de –, I.4.3 ; I.5.3 ; II.3.3.
Superposition
Principe de –, I.3.1 ; I.4.1 ; I.4.2 ; I.4.3 ;I.7.2 ; I.9.2 ; I.9.3 ; I.11.3 ; II.3.1 ; II.6.4 ;II.6.5 ; II.7.2 ; II.8.1 ; II.8.3 ; II.8.5.
Symétries matérielles, II.3.2 ; II.4.1.
TTemps caractéristique, I.1.
-- de relaxation, I.2.3 ; I.6.2 ; I.6.4 ; I.6.5 ;I.8.3 ; I.9.1 ; I.10.3 ; II.8.5.
-- de retard, I.2.3 ; I.6.3 ; I.6.4 ; I.6.5 ; I.8.3 ;I.9.1 ; I.10.3 ; II.8.5.
Torsion-- d’une poutre, I.7.2 ; II.7.4.Inertie de –, I.7.2 ; II.7.4.
Traction-- d’une barre, I.7.1 ; II.7.2.
VVieillissement, I.2.6 ; I.4.1 ; I.5.1 ; I.5.2 ; I.5.3 ;
I.6.1 ; I.6.4 ; I.8.1 ; I.9.4 ; I.11.4 ; II.5 ;II.6.6 ; II.8.5.
voigt
Solide de kelvin –, I.6.4.
zeiner
Modèle de –, I.6.4

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Dans la même collection
BiologieIntroduction à la génétique moderne. P. Monget et R. A. Veitia. 324 pages - ISBN 978-2-7302-1620-3.
Bioinformatique. Génomique et post-génomique - F. Dardel et F. Képès - 250 pages - ISBN 2-7302-0927-1
ChimieChimie moléculaire des éléments de transition - F. Mathey et A. Sevin - 300 pages - ISBN 2-7302-0714-7
Les orbitales moléculaires dans les complexes - avec Exercices et Corrigés - Y. Jean350 pages - ISBN 2-7302-1024-5
Chimie moléculaire, sol-gel et nanomatériaux - R. Corriu et Nguyen T.-A.208 pages - ISBN 978-2-7302-1413-1
Introduction à la chimie quantique - P. Hiberty et Nguyen T.-A. - 320 pages - ISBN 978-2-7302-1485-8
informatiqueIntroduction à la théorie des langages de programmation - G. Dowek, J.-J. Lévy112 pages - ISBN 978-2-7302-1333-2
Les principes des langages de programmation - G. Dowek - 176 pages - ISBN 978-2-7302-1526-8
Les démonstrations et les algorithmes : introduction à la logique et la calculabilité - G. Dowek - 200 pages - ISBN 978-2-7302-1569-5
ÉConomieIntroduction à la microéconomie - N. Curien110 pages - ISBN 2-7302-0722-8 - ISBN 978-2-7302-0722-5
Introduction à l’analyse macroéconomique - P.-A. Muet - 208 pages - ISBN 2-7302-1140-3
Économie de l’entreprise - J.-P. Ponssard, D. Sevy, H. Tanguy (2e édition)316 pages - ISBN 978-2-7302-1244-1
Corporate Social Responsibility? From Compliance to Opportunity - P. Crifo, J.-P. Ponssard - 298 pages - ISBN 978-2-7302-1568-8
Économie du climat. Pistes pour l’après-Kyoto - J.-P. Ponssard et O. Godard - 314 pagesISBN 978-2-7302-1576-3
mathÉmatiquesLe problème de Kepler. Histoire et théorie - A. Guichardet - 102 pages - ISBN 978-2-7302-1596-1
Autour des inégalités isopérimétriques - Sous la direction de Alessio Figalli - 130 pages - ISBN 978-2-7302-1573-2
Éléments d’analyse et d’algèbre (et de théorie des nombres) - Nouvelle édition - P. Colmez - 678 pages - ISBN 978-2-7302-1587-9

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Transversalité, Courants et Théorie de Morse. Un cours de topologie différentielle (exercices proposés par François Labourie) - F. Laudenbach - 200 pages - ISBN 978-2-7302-1585-5
Groupes et représentations - D. Renard - 223 pages - ISBN 978-2-7302-1571-8
Milieux continus en transformations finies. Hyperélasticité, Rupture, Élastoplasticité - C. Stolz - 278 pages - ISBN 978-2-7302-1562-6
Éléments d’analyse et d’algèbre (et de théorie des nombres) - P. Colmez -488 pages-ISBN 978-2-7302-1563-3
Cours d’analyse - J.-M. Bony - 272 pages - ISBN 2-7302-0775-1
Calcul différentiel et intégral - F. Laudenbach - 220 pages - ISBN 2-7302-0724-4
Méthodes mathématiques pour les sciences physiques - J.-M. Bony - 217 pages - ISBN 2-7302-0723-6
Siméon-Denis Poisson. Les mathématiques au service de la science - Y. Kosmann-Schwarzbach, 550 pages - ISBN 978-2-7302-1584-8
Les théorèmes de Noether - Y. Kosmann-Schwarzbach, avec la collaboration de L. Meersseman180 pages - ISBN 2-7302-1138-1 (2e édition)
Groupes et symétries. Groupes finis, groupes et algèbres de Lie, représentations - Y. Kosmann-Schwarzbach222 pages - ISBN 978-2-7302-1257-1 (2e édition)
Algèbre corporelle - A. Chambert-Loir - 200 pages - ISBN 2-7302-1217-5
Calcul variationnel - J.-P. Bourguignon - 348 pages - ISBN 978-2-7302-1415-5
Introduction à la théorie de Galois - D. Hernandez et Y. Laszlo - 226 pages - ISBN 978-2-7302-1593-0
Aspects des systèmes dynamiques - XUPS1994-1996 - N. Berline et C. Sabbah (Comité éditorial)238 pages - ISBN 978-2-7302-1560-2
Aspects de la théorie du contrôle - XUPS1999 - N. Berline et C. Sabbah (Comité éditorial)208 pages - ISBN 978-2-7302-1530-5
Groupes finis - XUPS 2000 - N. Berline et C. Sabbah (Comité éditorial)104 pages - ISBN 2-7302-0751-5
Pavages - XUPS 2001 - N. Berline et C. Sabbah (Comité éditorial) - 112 pages - ISBN 2-7302-0855-0
La fonction zêta - XUPS 2002 - N. Berline et C. Sabbah (Comité éditorial)206 pages - ISBN 2-7302-1011-3
Distributions - XUPS 2003 - Dans le sillage de Laurent Schwartz - N. Berline et C. Sabbah(Comité éditorial) - 106 pages - ISBN 2-7302-1095-4
Graphes- XUPS 2004 - N. Berline et C. Sabbah (Comité éditorial) - 84 pages - ISBN 2-7302-1182-9

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Théorie algorithmique des nombres et équations diophantiennes - XUPS2005 - N. Berline, A. Plagneet C. Sabbah (Comité éditorial) - 200 pages - ISBN 2-7302-1293-0
Théorie des jeux. Introduction à la théorie des jeux répétés - XUPS 2006 - N. Berline, A. Plagneet C. Sabbah (Comité éditorial) - 152 pages - ISBN 978-2-7302-1366-0
Sur la dynamique des groupes de matrices et applications arithmétiques - XUPS2007 - N. Berline, A. Plagne et C. Sabbah (Comité éditorial) - 160 pages - ISBN 978-2-7302-1418-6
Géométrie tropicale - XUPS2008 - P. Harinck, A. Plagne et C. Sabbah (Comité éditorial)128 pages - ISBN 978-2-7302-1529-9
Les représentations linéaires et le grand théorème de Fermat - XUPS2009 - P. Harinck, A. Plagne etC. Sabbah (Comité éditorial) - 140 pages - ISBN 978-2-7302-1566-4
Facettes mathématiques de la mécanique des fluides - XUPS2010 - P. Harinck, A. Plagne etC. Sabbah (Comité éditorial) - 118 pages - ISBN 978-2-7302-1578-7
Histoire de mathématiques - XUPS2011 - P. Harinck, A. Plagne et C. Sabbah (Comité éditorial)118 pages - ISBN 978-2-7302-1595-4
Henri Cartan & André Weil mathématiciens du xxe siècle - XUPS2012 - P. Harinck, A. Plagne et C. Sabbah (Comité éditorial) - 190 pages - ISBN 978-2-7302-1610-4
Aléatoire - XUPS2013 - P. Harinck, A. Plagne et C. Sabbah (Comité éditorial) - 130 pagesISBN 978-2-7302-1622-7
Chaos en mécanique quantique - XUPS2014 - P. Harinck, A. Plagne et C. Sabbah (Comité éditorial)156 pages - ISBN 978-2-7302-1631-9
Des problèmes à N corps aux Tokamaks - XUPS2015 - P. Harinck, A. Plagne et C. Sabbah (Comité édito-rial) - 88 pages - ISBN 978-2-7302-1643-2
Journal de l’École polytechnique. Mathématiques - Tome 1 - Année 2014 - 412 pages - ISBN 978-2-7302-1640-1
Séminaires, équations aux dérivées partielles - Années 1971 à 2001Séminaires, équations aux dérivées partielles - Année 2000-2001 - 400 pages - ISBN 2-7302-0834-8Séminaires, équations aux dérivées partielles - Année 2001-2002 - 364 pages - ISBN 2-7302-0930-1Séminaires, équations aux dérivées partielles - Année 2002-2003 - 390 pages - ISBN 2-7302-1041-5Séminaires, équations aux dérivées partielles - Année 2003-2004 - 404 pages - ISBN 2-7302-1183-7Séminaires, équations aux dérivées partielles - Année 2004-2005 - 404 pages - ISBN 2-7302-1221-3Séminaires, équations aux dérivées partielles - Année 2005-2006 - 366 pages - ISBN 2-7302-1335-XSéminaires, équations aux dérivées partielles - Année 2006-2007 - 444 pages - ISBN 978-2-7302-1414-8Séminaires, équations aux dérivées partielles - Année 2008-2009 - 308 pages - ISBN 978-2-7302-1567-1Séminaires, équations aux dérivées partielles - Année 2009-2010 - 342 pages - ISBN 978-2-7302-1613-5Séminaires, équations aux dérivées partielles - Année 2011-2012 - 491 pages - ISBN 978-2-7302-1617-3Séminaires Laurent Schwartz, EDP et applications - Année 2012-2013 - 356 pages - ISBN 978-2-7302-1626-5Séminaires Laurent Schwartz, EDP et applications - Année 2013-2014 - 262 pages - ISBN 978-2-7302-1633-3Séminaires Laurent Schwartz, EDP et applications - Année 2014-2015 - 332 pages - ISBN 978-2-7302-1650-0

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
mathÉmatiques appliquÉesUne exploration des signaux en ondelettes - S. Mallat - 654 pages - ISBN 2-7302-0733-3
Promenade aléatoire - M. Benaïm et N. El Karoui - 316 pages - ISBN 2-7302-1168-3Analyse numérique et optimisation - G. Allaire - 480 pages - ISBN 978-2-7302-1255-7
Systèmes hyperboliques de lois de conservation. Application à la dynamique des gaz - F. Dubois, B. Després208 pages - ISBN 2-7302-1253-1
Commande et optimisation de systèmes dynamiques - F. Bonnans et P. Rouchon286 pages - ISBN 2-7302-1251-5
Les outils stochastiques des marchés financiers. Une visite guidée de Einstein à Black-Scholes - N. El Karoui et E. Gobet - 238 pages - ISBN 978-2-7302-1579-4
Simulation stochastique et méthodes de Monte-Carlo - C. Graham et D. Talay - 210 pages - ISBN 978-2-7302-1582-4
Aléatoire. Introduction à la théorie et au calcul des probabilités - S. Méléard - 280 pages - ISBN 978-2-7302-1575-6
Bases mathématiques de la théorie des jeux - R. Laraki, J. Renault, S. Sorin - 186 pages - ISBN 978-2-7302-1611-1
Méthodes de Monte-Carlo et processus stochastiques : du linéaire au non-linéaire - E. Gobet - 258 pages - ISBN 978-2-7302-1616-6
Recherche opérationnelle : aspects mathématiques et applications - J.-F. Bonnans et S. Gaubert - 398 pages - ISBN 978-2-7302-1641-8
mÉCaniqueDynamique de l’atmosphère et de l’océan - P. Bougeault et R. Sadourny - 312 pages - ISBN 2-7302-0825-9
Introduction aux écoulements compressibles et aux fluides hétérogènes - A. Sellier175 pages - ISBN 2-7302-0764-5
Mécanique des milieux continus - J. SalençonTome 1 - Concepts généraux - 376 pages - ISBN 978-2-7302-1245-8 (avec CD-Rom)Tome 2 - Thermoélasticité - 344 pages - ISBN 978-2-7302-1419-3 (avec CD-Rom)Tome 3 - Milieux curvilignes - 162 pages - ISBN 978-2-7302-1644-9
de l’Élasto-plasticité au Calcul à la rupture - J. Salençon(accompagné d’un CD-Rom réalisé par J. Salençon) - 266 pages - ISBN 978-2-7302-0915-1
Viscoélasticité pour le calcul des structures - J. Salençon - 160 pages - ISBN 978-2-7302-1557-2
Fluides et Solides - E. de Langre - 130 pages - ISBN 978-2-7302-0833-8
Ondes acoustiques - A. Chaigne - 224 pages - ISBN 2-7302-0840-2
Stabilité des matériaux et des structures - C. Stolz - 206 pages - ISBN 2-7302-1076-8

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
www.editions.polytechnique.fr
Instabilités, Chaos et Turbulence - P. Manneville - 360 pages - ISBN 2-7302-0913-1
Vibrations des structures couplées avec le vent - P. Hémon - 144 pages - ISBN 2-7302-1332-5
Analyse des solides déformables par la méthode des éléments finis - M. Bonnet et A. Frangi316 pages - 2-7302-1349-XDynamique et vibrations - E. de Langre et A. Chaigne - 152 pages - ISBN 978-2-7302-1521-3
Modélisation et calcul des milieux continus - P. Le Tallec - 560 pages - ISBN 978-2-7302-1494-0
Poutres et arcs élastiques. P. Ballard et A. Millard - 312 pages - ISBN 978-2-7302-1561-9
Hydrodynamique de l’environnement. O. Thual - 328 pages - ISBN 978-2-7302-1564-0
Microhydrodynamique et fluides complexes. D. Barthès-Biesel - 292 pages - ISBN 978-2-7302-1572-5
Sport Physics - Paris MMXII - Sous la direction de C. Clanet - 640 pages - ISBN 978-2-7302-1615-9
physiquePhysique des Tokamaks - J.-M. Rax - 436 pages - ISBN 978-2-7302-1580-0
Semi-conducteurs : les bases de la théorie k.p - G. Fishman - 742 pages - ISBN 978-2-7302-1497-1
Énergie nucléaire - J.-L. Basdevant, J. Rich et M. Spiro - 340 pages - ISBN 2-7302-0901-8
Mécanique quantique - J.-L. Basdevant et J. Dalibard(accompagné d’un CD-Rom de M. Joffre) 520 pages - ISBN 978-2-7302-0914-4
Problèmes quantiques - J.-L. Basdevant et J. Dalibard - 214 pages - ISBN 2-7302-1117-9
Principes de la cosmologie - J. Rich, adaptation française J.-L. Basdevant - 400 pages - ISBN 2-7302-0925-5
Introduction à la relativité - A. Rougé - 188 pages - ISBN 978-2-7302-0940-3
Relativité restreinte. La contribution d’Henri Poincaré - A. Rougé - 288 pages - ISBN 978-2-7302-1525-1
Introduction à la physique subatomique - A. Rougé - 448 pages - ISBN 2-7302-1231-0
Physique statistique et illustrations en physique du solide. - C. Hermann - 292 pages - ISBN 978-2-7302-1022-5
Bases physiques de la plasticité des solides - J.-C. Tolédano - 264 pages - ISBN 978-2-7302-1378-3
Physique des électrons dans les solides. Structure de bandes, Supraconductivité et Magnétisme. H. Alloul - Tome 1 - 360 pages - ISBN 978-2-7302-1411-7
Physique des électrons dans les solides. Recueil d’exercices et de problèmes. H. AlloulTome 2 - 272 pages - ISBN 978-2-7302-1412-4

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
Achevé d’imprimer en mai 2016 sur les pressesdu Centre Poly-Média de l’École polytechnique
Dépôt légal : 2e trimestre 2009ISBN 978 – 2 – 7302 – 1557 – 2. Imprimé en France