workshop model based calibration methodologies begr¨ußung...
TRANSCRIPT

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Workshop
Model based calibration methodologies
Begrußung, Einleitung
Stefan Jakubek,Technische Universitat Wien,Institut fur Mechanik und Mechatronik
m
Thomas Winsel,AVL List GmbH, GrazPowertrain Calibration Technologies
Workshop Model based calibration methodologies Begrußung, Einleitung 1/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Inhalt
1 Introduction
2 Team
3 Reference Projects
4 Research Topic A
5 Research Topic B
6 Summary
Workshop Model based calibration methodologies Begrußung, Einleitung 2/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
General aspects
The new Christian Doppler Laboratory pursues thedevelopment of new and integrated methodologiesfor model based calibration of automotive systems:Combustion engines, Powertrain systems, Hybrid components
EGR
A/F ratio Environment
Spark advance
InjectiontimingExhaustIntake
VVT-Timing
Driver
Performance EmissionsDriveability
Conflicting goalsFuel Efficiency
VTG
Different input parameters
load
speed
Workshop Model based calibration methodologies Begrußung, Einleitung 3/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
mInstitute of Mechanics and Mechatronics
Faculty for Mechanical Engineering and Business Science
Five departments
Vehicle dynamics and biomechanics (multibody simulation in vehicle dynamics)Applied mechanics (nonlinear stability theory)Machine dynamicsMeasurement and actautor technologyControl and process automation
Dept. of Control and Process Automation: 3 research areas
Active vibration damping , Process control, Automotive control
Methodology
Nonlinear system identificationState observation/Kalman FiltersLinear/nonlinear predictive controlH2- and H∞-control (robust control)
Workshop Model based calibration methodologies Begrußung, Einleitung 4/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Track geometry estimation
with regular vehicles
Goals:
Estimation of track geometry by measurements onthe train
Linear and nonlinear model identification
Process and measurement noise estimation
Nonlinear Kalman filter with constraints
Sensor placement
Virtual test bed (Multi-Body System)
Valuation of safety limits
Evaluation of track-vehicle interactions
y1y2y3y4
v
u1u2u3u4
Workshop Model based calibration methodologies Begrußung, Einleitung 5/29
Introduction Team Reference Projects Research Topic A Research Topic B Summary
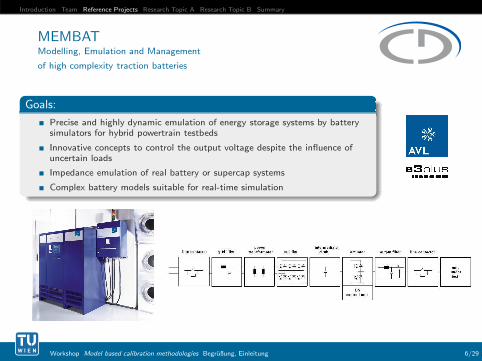
MEMBATModelling, Emulation and Management
of high complexity traction batteries
Goals:
Precise and highly dynamic emulation of energy storage systems by batterysimulators for hybrid powertrain testbeds
Innovative concepts to control the output voltage despite the influence ofuncertain loads
Impedance emulation of real battery or supercap systems
Complex battery models suitable for real-time simulation
Workshop Model based calibration methodologies Begrußung, Einleitung 6/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
BioNetControlPredictive Control and optimization
of district heating networks with biomass power plants
Goals
Modelling of relevant system components
Higher-level optimal control of the total system
Lower-level optimal control of the plant
Modular design and structured configuration
Robust MPC with respect to model mismatch
Grid
Steamturbine
Gas power plant
Biomasspower plant I
Biomasspower plant II
Consumer
Consumer
Consumer
District heating net
Workshop Model based calibration methodologies Begrußung, Einleitung 7/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Team des CD-Labors
TU-Wien, Inst. E325
Laborleiter: Prof. Stefan JakubekPostDoc: Dr. Christoph HametnerPhD 1: DI Christian MayrPhD 2: DI Markus Stadlbauer
AVL-List GmbH
DI Horst Pflugl: Entwicklungsleiter Powertrain Calibration Technologies
Dr.-Ing. Thomas Winsel: Research Manager Powertrain Calibration TechnologiesDr.-Ing. Timo Combe: Fachteamleiter Methodology, Development and Calibration
Dr. Mario Schweiger: Application manager Hybrid testing systems and battery managementsystems
DI Manuel Nebel: Calibration of Diesel engines for series production of passenger cars
Extern
Prof. Stefan Volkwein (Univ. Konstanz): Hull AlgorithmsTeam of Prof. Steindl (TUW): Stability Analysis
Workshop Model based calibration methodologies Begrußung, Einleitung 8/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
General aspects
The proposed CDL pursues two main targets which are organised in researchtopics:
Research Topics of the CDL:
Research Topic A: The basic development of methodologies for anintegrated model based calibration workflow. Research Topic A
Research Topic B: The systematic employment and enhancement of thesemethodologies to essential calibration tasks. Research Topic B
Workshop Model based calibration methodologies Begrußung, Einleitung 9/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Research Topic A
Main Focus: Development of new methodologies and the related basic researchfor all steps in model based calibration. There are three research tasks:
A1: Experiment design
A2: Nonlinear system identification
A3: Controller stability analysis and design
Workshop Model based calibration methodologies Begrußung, Einleitung 10/29
Introduction Team Reference Projects Research Topic A Research Topic B Summary
Research Topic B
Main Focus: Integration of Topic A results into application workflows foressential calibration tasks:
B1: Battery Managment System Calibration
B2: Gasoline & Diesel engine calibration workflow
B3: Cold start calibration
Workshop Model based calibration methodologies Begrußung, Einleitung 11/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Interconnection of research topics A & B
Re
sea
rch
Ta
sk A
1
Research Task B1
Research Topic A
Re
sea
rch
To
pic
B
Exp
eri
me
nt
de
sig
n
Re
sea
rch
Ta
sk A
3
Co
ntr
oll
er
sta
bil
ity
an
aly
sis
& d
esi
gn
Re
sea
rch
Ta
sk A
2
No
nli
ne
ar
syst
em
ide
nti
fica
tio
n
Battery Managment System Calibration
Research Task B2
Gasoline & Diesel engine calibration workflow
Research Task B3
Cold start calibration
Workshop Model based calibration methodologies Begrußung, Einleitung 12/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Research Task A1:Experiment design
State of the art: Experiment design for static models
- Analytic representation of the area of operation (direct & indirect methods)
- Mixture criterion for candidate selection (A,S,D-optimality)
0
5000
0
50
1000.7
0.8
0.9
1
1.1
load [Nm] speed [rpm]
λ[−
]
Workshop Model based calibration methodologies Begrußung, Einleitung 13/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Research Task A1:Experiment design
Research programme: Experiment design for dynamic models
- Determination of the dynamic area of operation (test based, model based)
- Analytic representation of the dynamic area of operation (local driveable areas)
- Creation of a dynamic experiment design (time space, distribution)
0 10 20 30 40 50−1
0
1
0 10 20 30 40 50−1
0
1
u1
u2
time [samples]
time [samples]
0 10 20 30 40 50
−1
0
1−1
−0.5
0
0.5
1
u1
u2
time [samples]
Workshop Model based calibration methodologies Begrußung, Einleitung 14/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Model Based DoE
Optimal Design of Experiments based on a process model
onlineoffline
existing
modelmodel
initial model
based DoE
train/adaptonline DoE
Motivation
DoE subsequent to component changes
DoE for changed environmental conditions
Use a model of a comparable process (e.g. a similar engine)
Use a model from online training to optimize future process inputs (online DoE)
Adherence to process constraints (inputs & outputs)
Workshop Model based calibration methodologies Begrußung, Einleitung 15/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Model Based DoEOptimality Criteria
The Fisher Information Matrix I is used as a measure:
I(ψ) =1
(k − nmax)
1
σ2ψ
Tψ
Example for model structure: Dynamic multilayer perceptron network:
:
:
:
:
u u(t − 1)
u(t − 2)
y(t − 1)
y(t − 2)
q−1
q−1
q−2
q−2
ωnhnϕ
ωj0
ωjk
ω12
ω11
ω10
W10
W11W11
W1j
W1nh
f1
fj
fnh
1
1
∑y(t)
Workshop Model based calibration methodologies Begrußung, Einleitung 16/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Research Task A2:Nonlinear System Identification
State of the art: Nonlinear dynamic system identification
- Neural networks (black box), physical models (white box)
- Grey-Box: Incorporation of qualitative physical knowledge
- Advanced parameter estimation methods (GTLS)
1000 1500 2000 2500
5
10
15
20
25
30
inje
ctio
nm
ass
[mg]
speed [rpm]
Workshop Model based calibration methodologies Begrußung, Einleitung 17/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Research Task A2:Nonlinear System Identification
Research programme: Nonlinear dynamic system identification
- Workflow of system identification for non experts- User-defined performance criteria (relative error, data tansformation)- Operating regime based models (user-defined pre-partitioning)- Constraints (= incorporation of quantitative knowledge)- Model adaptation and extension (new operational conditions)
dynamic
local dynamic
dynamicdynamic
local dynamic
staticstatic
staticdynamic
dynamic
local dynamic
dynamicdynamic
local dynamic
staticstaticstaticstatic
static
N, QMain,
rEGR, rVNT
PRail, phiMI
Inputs
NOx,Soot, HC
mfuel , mAir
p2, p3, T2, T3
Md, nTurbo
Outputs
0 200 400 600 800
0
200
400
600
800
time [samples]
NO
x[p
pm
]
DataModel
Workshop Model based calibration methodologies Begrußung, Einleitung 18/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Operating Regime ModelModelling strategy
Local nonlinear models
Embedded in the operatingregime model
User-defined pre-partitioning
Split into segmentsrepresenting the main physicaleffects (using load and speed)
speed
load
local nonlinear model κj
Workshop Model based calibration methodologies Begrußung, Einleitung 19/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Operating Regime ModelTraining of the local nonlinear models
One local nonlinear model ineach operating regime
Mean squared error (MSE)at the training data for eachlocal model (exemplarily forPmax)
Stem plot illustrates locallydifferent complexity:
→ Highly nonlinearbehaviour of the engine
→ MSE varies in a widerange which reflectslocally different noiselevels and inputsensitivities
10001500
2000250010
20
30
0
1
2
3
4
5
6
x 10-4
N
Q
MSE
Workshop Model based calibration methodologies Begrußung, Einleitung 20/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Research Task A3:Controller Stability Analysis and Design
State of the art:
- Gain scheduled PID control
- Gain scheduled observation/estimation (e.g. SoC)
- Manual tuning with simulation models
LM 1
Linearised
model
Controller
design
Operating
point
dependentOperating point dependent
…
a) Standard b) Controller network
…LM 2
LM M
LM 1
LM 2
LM M
LC 1
LC 2
LC M
Controller
design
Workshop Model based calibration methodologies Begrußung, Einleitung 21/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Research Task A3:Controller Stability Analysis and Design
Research programme: Controller stability analysis and design
- Open loop stability analysis of dynamic model networks: Lyapunov stability theory
- Closed loop stability conditions (local controller network)
- Support for design of controllers/estimators
- Effect of model parameter uncertainties on controller design (robustness)
−2 −1 0 1 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
y(t)
y(t
)
LM1 LM2 LM3 LM4 LM5
Workshop Model based calibration methodologies Begrußung, Einleitung 22/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Global StabilityMotivational Example
Stable and unstable combinations of two stable local models
Two stable State-Space models:
x(k + 1) = Aix(k) i = 1, 2
Global stability of the LMN depends on the partitioning!
Partitioning along x1 direction:
−2 −1.5 −1 −0.5 0 0.5 1−2
−1.5
−1
−0.5
0
0.5
1
x1
x2
Partitioning along x2 direction:
−15 −10 −5 0 5 10−15
−10
−5
0
5
10
x1
x2
Workshop Model based calibration methodologies Begrußung, Einleitung 23/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Direct Lyapunov MethodsThree different approaches
CommonQuadratic Lyapunov
Function
Piecewise QuadraticLyapunov Function
FuzzyLyapunov Function
Workshop Model based calibration methodologies Begrußung, Einleitung 24/29
Introduction Team Reference Projects Research Topic A Research Topic B Summary
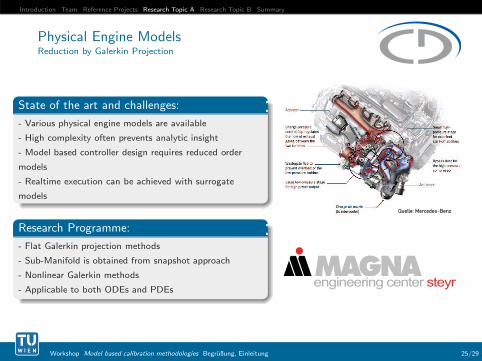
Physical Engine ModelsReduction by Galerkin Projection
State of the art and challenges:
- Various physical engine models are available
- High complexity often prevents analytic insight
- Model based controller design requires reduced order
models
- Realtime execution can be achieved with surrogate
models
Research Programme:
- Flat Galerkin projection methods
- Sub-Manifold is obtained from snapshot approach
- Nonlinear Galerkin methods
- Applicable to both ODEs and PDEs
Quelle: Mercedes-Benz
engineering center steyr
Workshop Model based calibration methodologies Begrußung, Einleitung 25/29
Introduction Team Reference Projects Research Topic A Research Topic B Summary
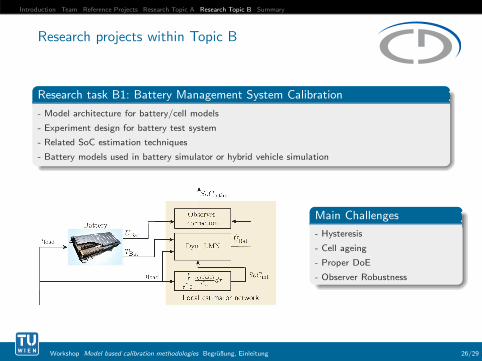
Research projects within Topic B
Research task B1: Battery Management System Calibration
- Model architecture for battery/cell models
- Experiment design for battery test system
- Related SoC estimation techniques
- Battery models used in battery simulator or hybrid vehicle simulation
Main Challenges
- Hysteresis
- Cell ageing
- Proper DoE
- Observer Robustness
Workshop Model based calibration methodologies Begrußung, Einleitung 26/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Research projects within Topic B
Research task B2: Gasoline & Diesel engine calibration workflow
- Integrated workflow: DoE, identification, optimisation/calibration
- Dynamic models for torque, fuel consumption, NOx, HC, CO, boost pressure, air mass flow
- Split of the overall system behaviour into static and dynamic submodels
- Integration of physical submodels
dynamic
local dynamic
dynamicdynamic
local dynamic
staticstatic
staticdynamic
dynamic
local dynamic
dynamicdynamic
local dynamic
staticstaticstaticstatic
static
N, QMain,
rEGR, rVNT
PRail, phiMI
Inputs
NOx,Soot, HC
mfuel , mAir
p2, p3, T2, T3
Md, nTurbo
Outputs
Workshop Model based calibration methodologies Begrußung, Einleitung 27/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Research projects within Topic B
Research task B3: Cold start calibration
Iterative procedure comprising
- Cold start experiment: A single experiment with a fixed parameter setting
- Model adaptation: Adjustments of the process model based on experiment data
- ECU parameter adjustments: Optimisation of engine start reliability, engine speed overshoot, HC
emissions and catalyst temperature
Air Path Fuel Path
Air-Fuel-Mixture & Combustion
Indicated
Torque
Motored
Torque
Emissions
Cylinder
Throttle Injection
Load
Motion Coolant
Speed
Temperatures
Ignitio
n
Air Path Fuel Path
Air-Fuel-Mixture & Combustion
Indicated
Torque
Motored
Torque
Emissions
Cylinder
Throttle Injection
Load
Motion Coolant
Speed
Temperatures
Ignitio
n
Air PathAir Path Fuel PathFuel Path
Air-Fuel-Mixture & CombustionAir-Fuel-Mixture & Combustion
Indicated
Torque
Indicated
Torque
Motored
Torque
Motored
Torque
EmissionsEmissions
Cylinder
ThrottleThrottle InjectionInjection
LoadLoad
MotionMotionMotion CoolantCoolant
Speed
Speed
TemperaturesTemperatures
Ignitio
nIg
nitio
n
Workshop Model based calibration methodologies Begrußung, Einleitung 28/29

Introduction Team Reference Projects Research Topic A Research Topic B Summary
Summary
Christian Doppler Labor TU-Wien & AVL-List GmbH:Model based calibration methodologies
Research Topic A: Basic research Topic A
Experiment design
Nonlinear system identification
Controller analysis and design
Research Topic B: Application oriented research Topic B
Battery Managment System Calibration
Controller calibration workflow
Cold start and warm up
Return to TOC WS Programme
Workshop Model based calibration methodologies Begrußung, Einleitung 29/29