بسم الله الرحمن الرحيم university of khartoum department of electrical and...
TRANSCRIPT

الرحيم الرحمن الله بسم
Signals and SystemsLecture 15: Laplace Transform
University of Khartoum
Department of Electrical and Electronic Engineering
Third Year - 2015
Dr. Iman AbuelMaaly Abdelrahman

Outline
• Signal Transforms• Laplace Transform• Region of Convergence• Pole-Zero Plot• Exercises
2 2015

Signals Transform
Continuous-Time signals Discrete-Time signals
Signal in time domain x(t)
Signal in frequency domain - Fourier Series Ck
- Fourier Transform X(jω)
Signal in Laplace domai - - - Laplace Transform X(s)
Signal in time domain x[n]
Signal in frequency domain - Fourier Series Ck
- Fourier Transform X(ejω)
Signal in Z- domain- Z- Transform X(Z)
3
DSP
DSP
The Laplace Transform
• Assume s is any complex number of form:s = + j
• That is, s is not purely imaginary and it can also have real values.
• X(s)|s=j=X(j).
• X(s) is called the Laplace transform of x(t)
)()( sXtx L4 2015

In general, for a signal x(t):
Is the bilateral Laplace transform, and
Is the unilateral Laplace transform.
dtetxsX st)()(
0
)()( dtetxsX st
Laplace Transform
5
The xy-axis plane, where x-axis is the real axis and y-axis is the imaginary axis, is called the s-plane.
Laplace Transform ( S-Plane)
Re (S)
Im (S)
6

• Fourier transform is the projection of Laplace transform on the imaginary axis on the s-plane.
• This gives two additional flexibility issues to the Laplace transform:–Analyzing transient behavior of systems–Analyzing unstable systems
Laplace Transform
7

Region of Convergence (ROC)
• Similar to the integral in Fourier transform, the integral in Laplace transform may also not converge for some values of s.
• So, Laplace transform of a function is always defined by two entities:–Algebraic expression of X(s).–Range of s values where X(s) is valid, i.e.
region of convergence (ROC).
8 2015

Region of Convergence (ROC)
The ROC consists of those values of
for which the Fourier Transform of
Converges
js
tetx )(
9 2015

•Transform techniques are an important tool in the analysis of signals and LTI
systems .•The Z-transform plays the same role in the
analysis of discrete-time signals and LTI systems as the Laplace transform does in the analysis of continuous-time signals and systems.
The Laplace Transform
10

Example (L-Transform)
Compute the Laplace Transform of the following signal:
For what values of a X(s) is valid?
)()( tuetx at
11 2015

Obtain the Fourier Transform of the signal
dtetxjX tj )()(
(1)12

• Laplace Transform
or with
dteejX tjta )()(
dtetuedtetxsX statst )()()(
js
13 2015

By comparison with Eqn )1( we recognized Eqn)1( as the Fourier Transform of
And Thus,
)()( tue ta
0,)(
1)(
a
jajX
14 2015
• Or equivalently, since and
And thus
That is,
js }Re{s
asas
sX
}Re{,1
)(
asas
tue Lat
}Re{,1
)(15
0 a
2015

16 2015

Example 2
)()( tuetx at
0)(
)()(
dte
dttueesX
tas
stat
asas
tue Lat
}Re{,1
)(17 2015
t
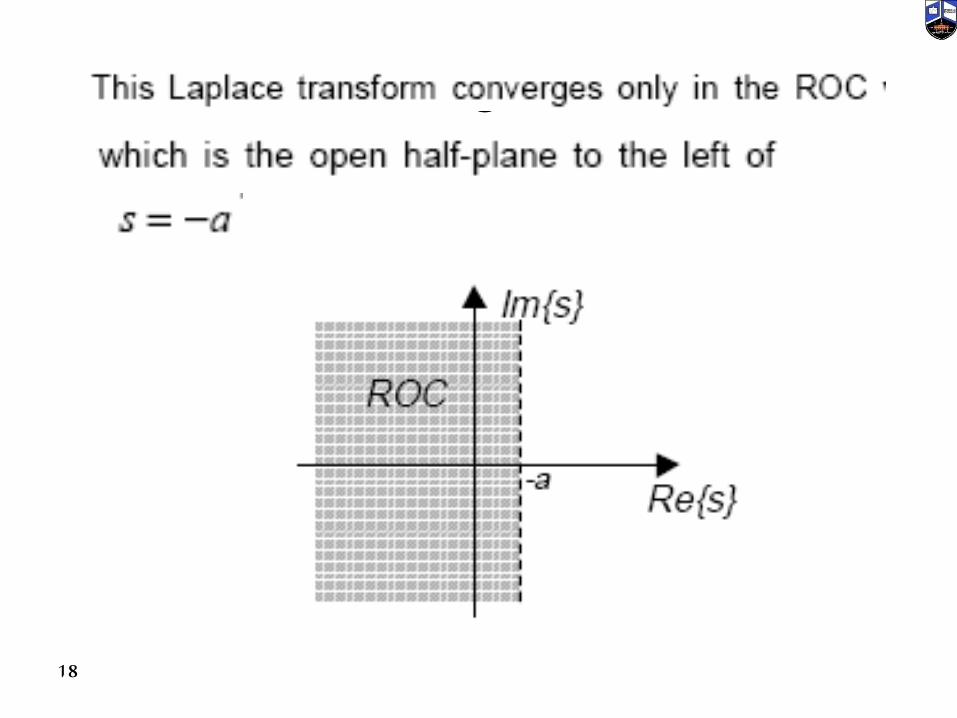
18

19

20

21 2015

Pole-Zero Plot
• Given a Laplace transform
- Poles of X)s(: are the roots of D)s(.
- Zeros of X)s(: are the roots of N)s(.
22
)(
)()(
sD
sNsX
2015

Example3 Find X(s) for the following x(t).
)(2)(3)( 2 tuetuetx tt
23
1}Re{,1
1)(
2}Re{,2
1)(2
ss
tue
ss
tue
Lt
Lt
2015

• The set of values of Re{s} for which the Laplace transforms of both terms converges is Re{s} >-1, and thus combining the two terms on the right hand side of the above equation we obtain:
1}Re{,23
1)(2)(3
22
sss
stuetue Ltt
24
1}Re{,1
2
2
3)(
s
sssX
2015

Has poles at p1 =-1 and p2 =-2 and a zero at z =1
25
1}Re{,)1)(2(
1)(
s
ss
ssX
2015

Re
Im
-1-21
XX
zerospole
S-planeROC
26
1}Re{,)1)(2(
1)(
s
ss
ssX

Inverse Laplace Transform
• Integral of inverse Laplace transform:
• However, we will mainly use tables and properties of Laplace transform in order to evaluate x)t( from X)s(.
• That will frequently require partial fractioning.
j
j
stdsesXj
tx )(2
1)(
27

Laplace Transform and LTI
In the above system, H)s( is called the transfer function of the system. It is also known as Laplace transform of the impulse response h)t(.
)()(
)()( )(
sHedehe
dehty
stsst
ts
LTI
x(t)=est y(t)=h(t)* est
28 2015

System Characterization by LT
Causality
Stability
h(t)x(t) y(t)
29
)()()()()()( sHsXsYthtxty L
30