1 vector architectures sima, fountain and kacsuk chapter 14 cse462
Post on 18-Dec-2015
215 views
TRANSCRIPT
1
VectorArchitectures
Sima, Fountain and KacsukChapter 14
CSE462
2
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
A Generic Vector Machine
The basic idea in a vector processor is to combine two vectors and produce an output vector.
If A, B and C are vectors, each of N elements, then a vector processor can perform the following operation:– C := B + A
which is interpreted as:– c(i) := b (i) + a (i), 0 ≤ i ≤ N-1
3
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
A Generic Vector Processor
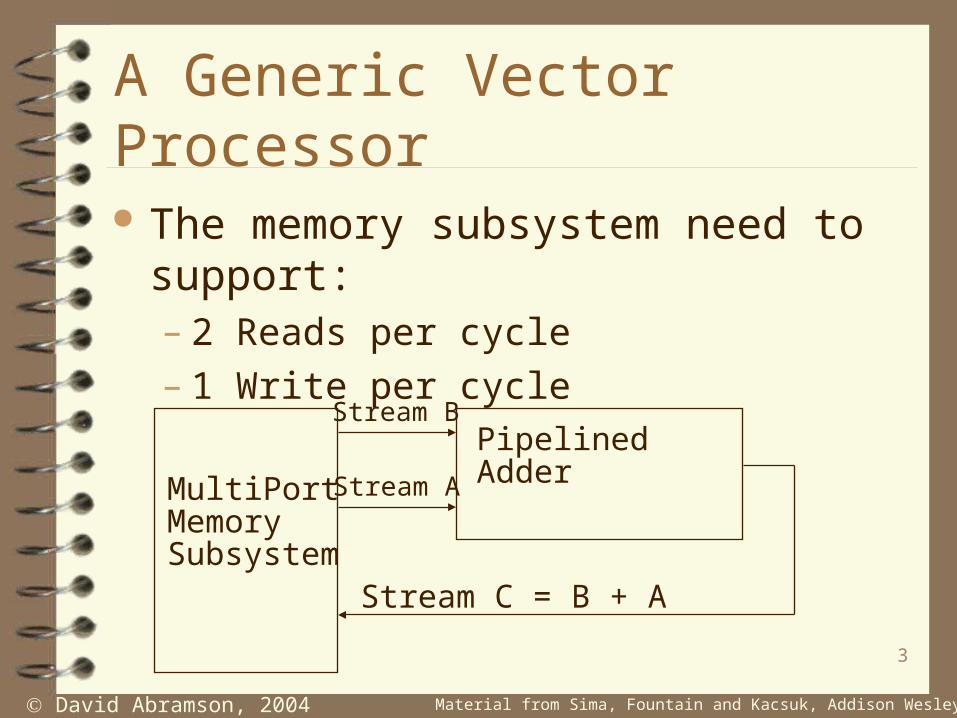
The memory subsystem need to support:– 2 Reads per cycle– 1 Write per cycle
MultiPortMemorySubsystem
Pipelined Adder
Stream B
Stream A
Stream C = B + A

4
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Un-vectorized computation
Compute first address
Fetch first dataCompute second address
Fetch second data
Compute result
Fetch destination address
Store result
precomputetime t1
computetime t2
post-computetime t3
Time
Compute time for one result = t1 + t2 + t3
Compute time for N results = N(t1 + t2+ t3)

5
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Vectorized computation
Compute first address
Fetch first dataCompute second address
Fetch second data
Compute resultFetch destination address
Store result
precomputetime t1
computetime t2
per result
post-computetime t3
Time
Compute time for N results = t1 + Nt2+ t3
6
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
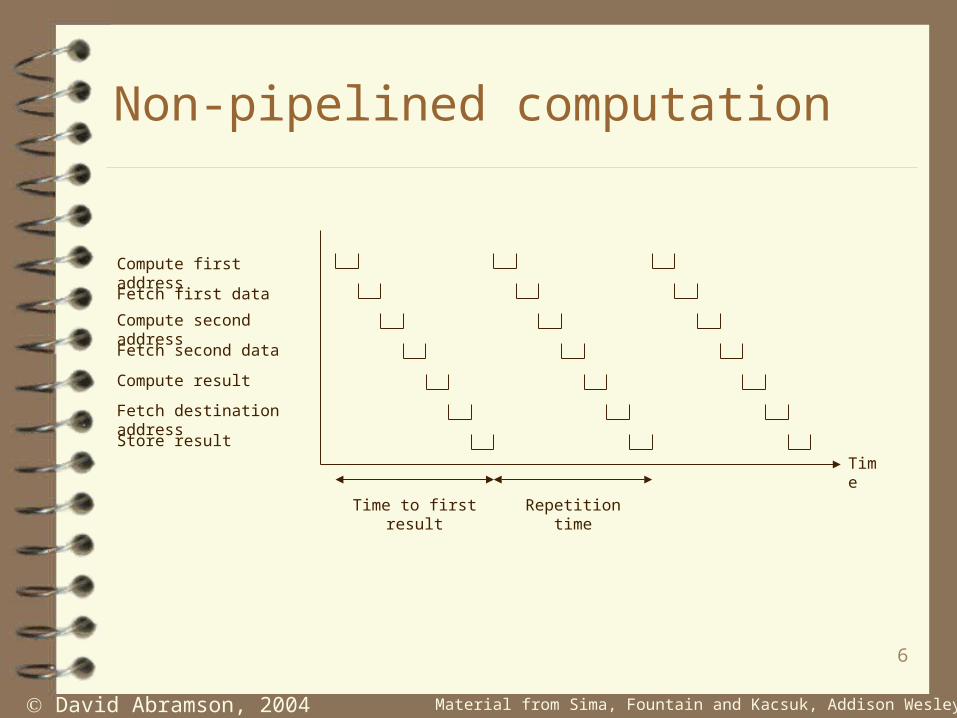
Non-pipelined computation
Compute first address
Fetch first data
Compute second address
Fetch second data
Compute result
Fetch destination address
Store result
Time
Time to first result Repetition time
7
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
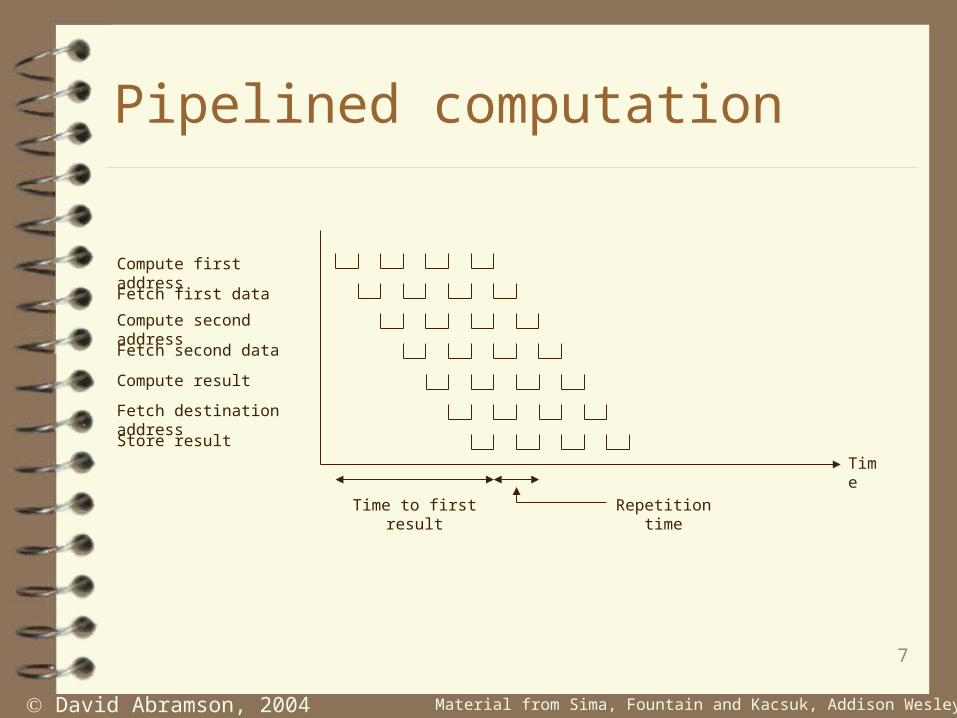
Pipelined computation
Compute first address
Fetch first data
Compute second address
Fetch second data
Compute result
Fetch destination address
Store result
Time
Time to first result Repetition time
8
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
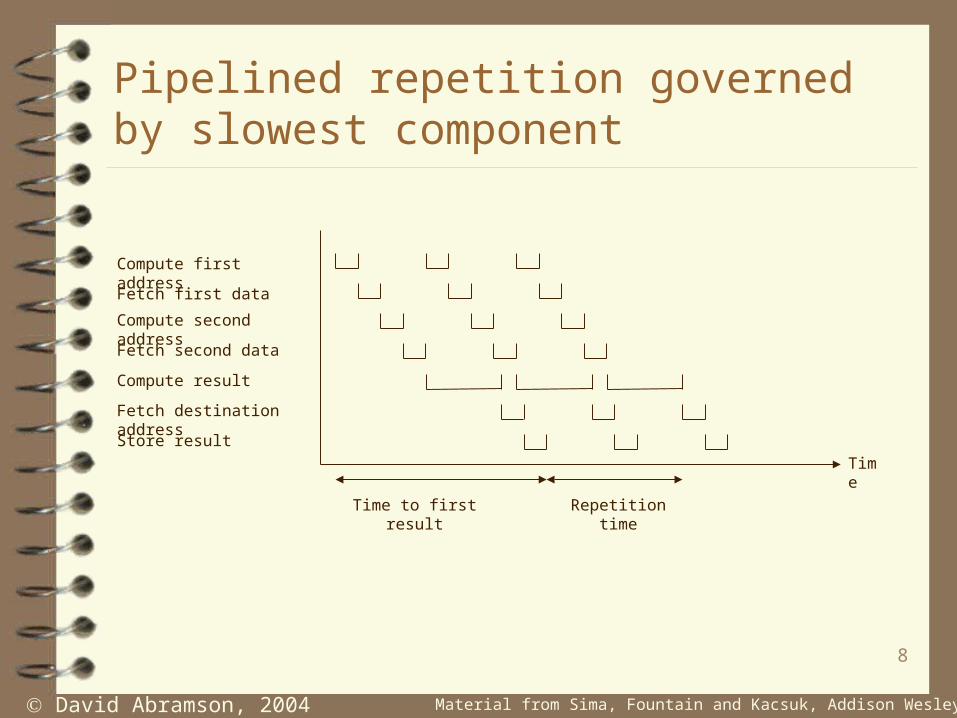
Pipelined repetition governed by slowest component
Compute first address
Fetch first data
Compute second address
Fetch second data
Compute result
Fetch destination address
Store result
Time
Time to first result Repetition time

9
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Pipelined granularity increased to improve repetition rate
Compute first address
Fetch first data
Compute second address
Fetch second data
Increased granularity for computation
Time
Fetch destination address
Store result
Time to first result Repetition time
10
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
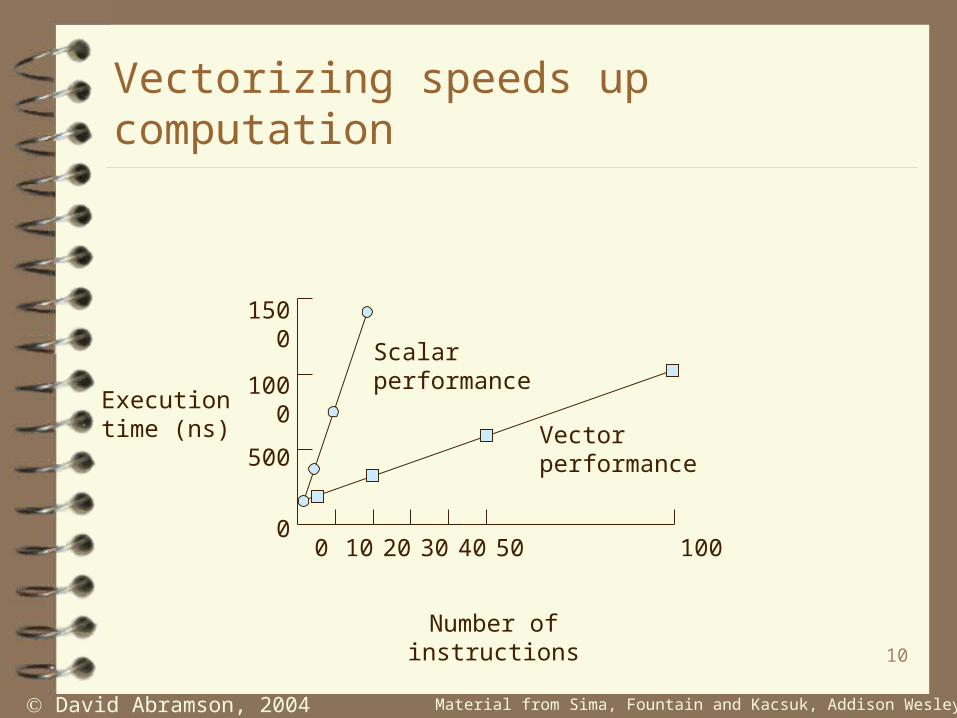
Vectorizing speeds up computation
1500
1000
500
0
Execution time (ns)
0 10 20 30 40 50 100
Number of instructions
Scalar performance
Vector performance
11
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Interleaving
If vector pipelining is to work then it must be possible to fetch instructions from memory quickly.
There are two main ways of achieving this:– Cache Memories– Interleaving
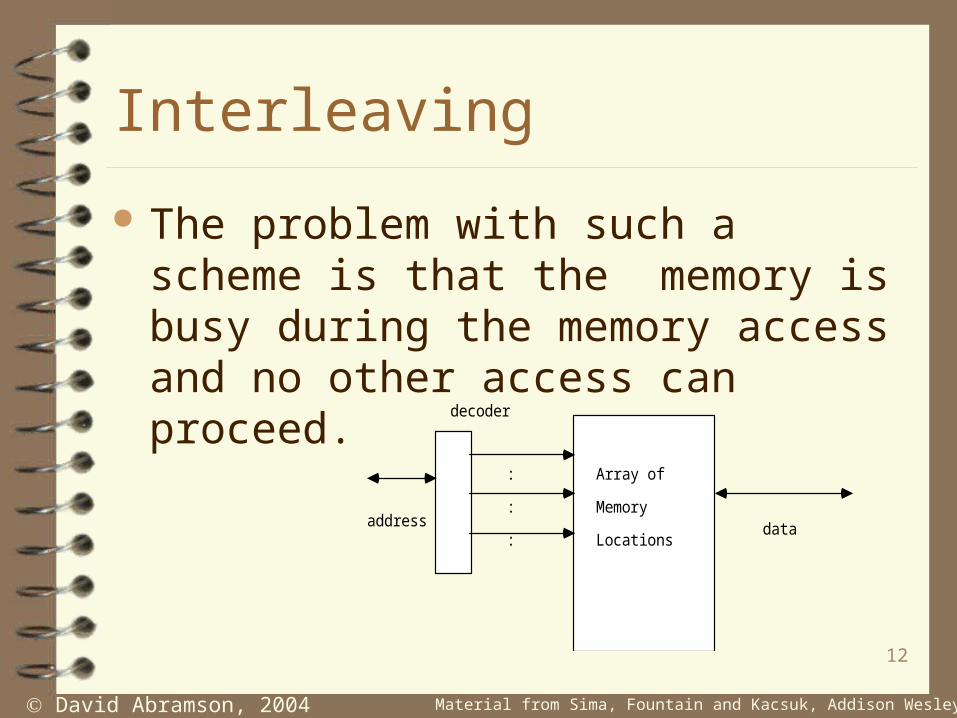
A conventional memory consists of a set of storage locations accessed via some sort of address decoder.
12
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Interleaving
The problem with such a scheme is that the memory is busy during the memory access and no other access can proceed.
Array of Memory Locations
: : :
decoder
address data
13
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Interleaving
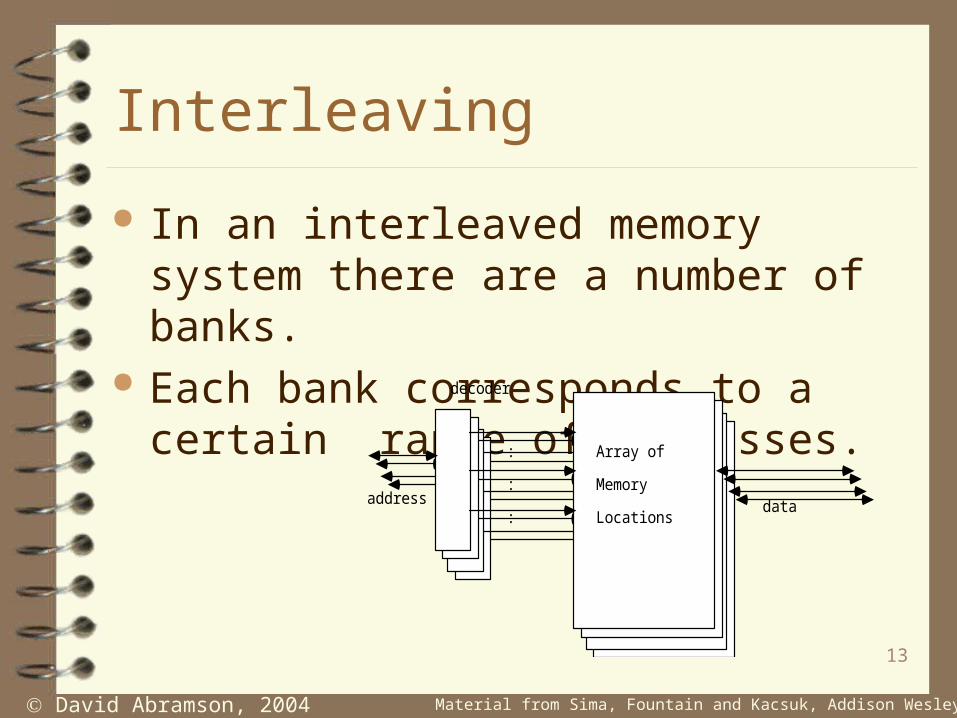
In an interleaved memory system there are a number of banks.
Each bank corresponds to a certain range of addresses.
Array of Memory Locations
: : :
decoder
address data
14
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Interleaving
A pipelined machine can be kept fed with instructions even though the main memory may be quite slow.
An interleaved memory system slows down when subsequent accesses are for the same bank of memory.
Rare when prefetching instructions, because they tend to be sequential.
Possible to access two locations at the same time if they reside in different banks.
Banks are usually selected using some of the low order bits of the address because sequential access will access different banks.
15
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
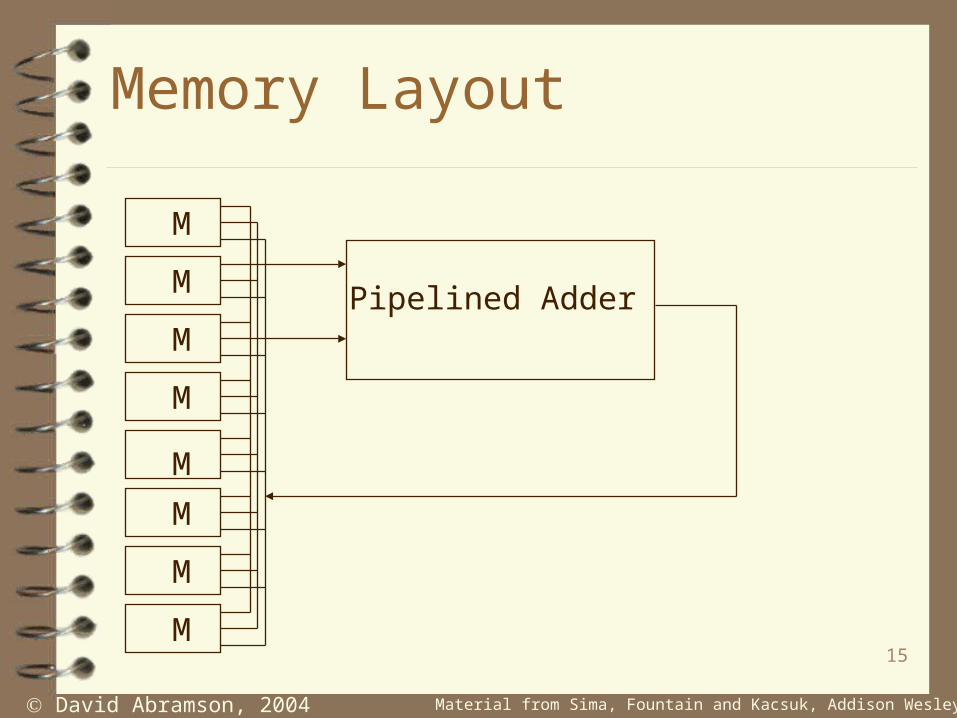
Memory Layout
M
M
M
M
M
M
M
M
Pipelined Adder
16
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
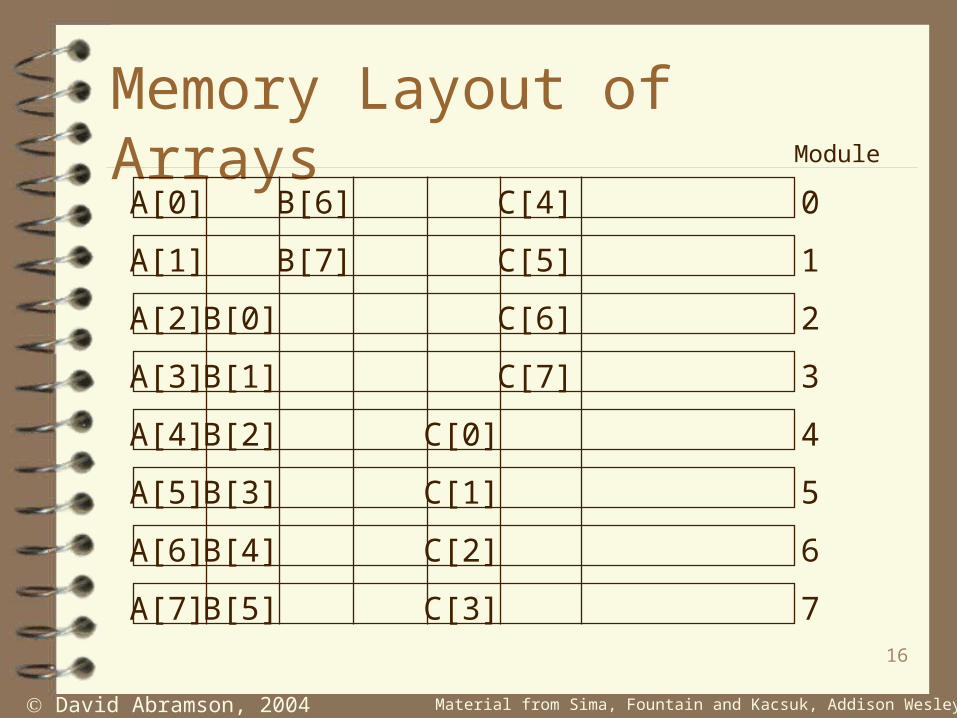
Memory Layout of Arrays
A[0]
A[1]
A[2]
A[3]
A[4]
A[5]
A[6]
A[7]
B[0]
B[1]
B[2]
B[3]
B[4]
B[5]
B[6]
B[7]
C[0]
C[1]
C[2]
C[3]
C[4]
C[5]
C[6]
C[7]
0
1
2
3
4
5
6
7
Module
17
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
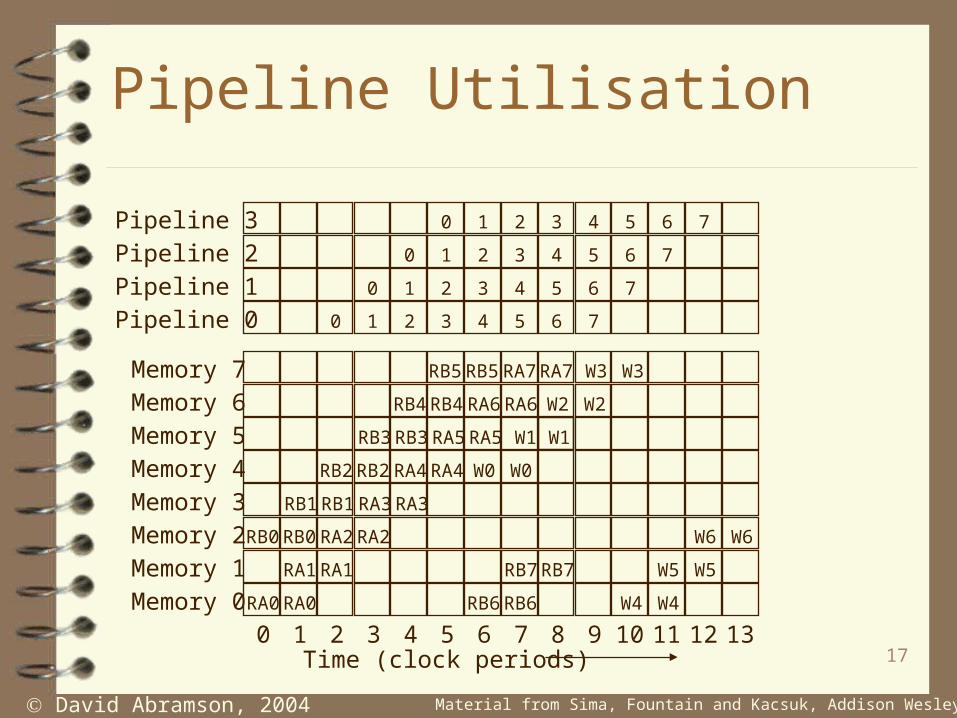
Pipeline Utilisation
Time (clock periods)0 1 2 3 4 5 6 7 8 9 10 11 12 13
Memory 0
Memory 1Memory 2Memory 3
Memory 4Memory 5
Memory 6Memory 7
Pipeline 0Pipeline 1
Pipeline 2Pipeline 3
RA0RA0
RA1RA1
RA2RA2
RA3RA3
RA4RA4
RA5RA5
RA6RA6
RA7RA7
RB0RB0
RB1RB1
RB2 RB2
RB3 RB3
RB4 RB4
RB5RB5
RB6 RB6
RB7 RB7
0 1 2 3 4 5 6 7
0 1 2 3 4 5 6 7
0 1 2 3 4 5 6 7
0 1 2 3 4 5 6 7
W0 W0
W1 W1
W2 W2
W3 W3
W4 W4
W5 W5
W6 W6
18
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
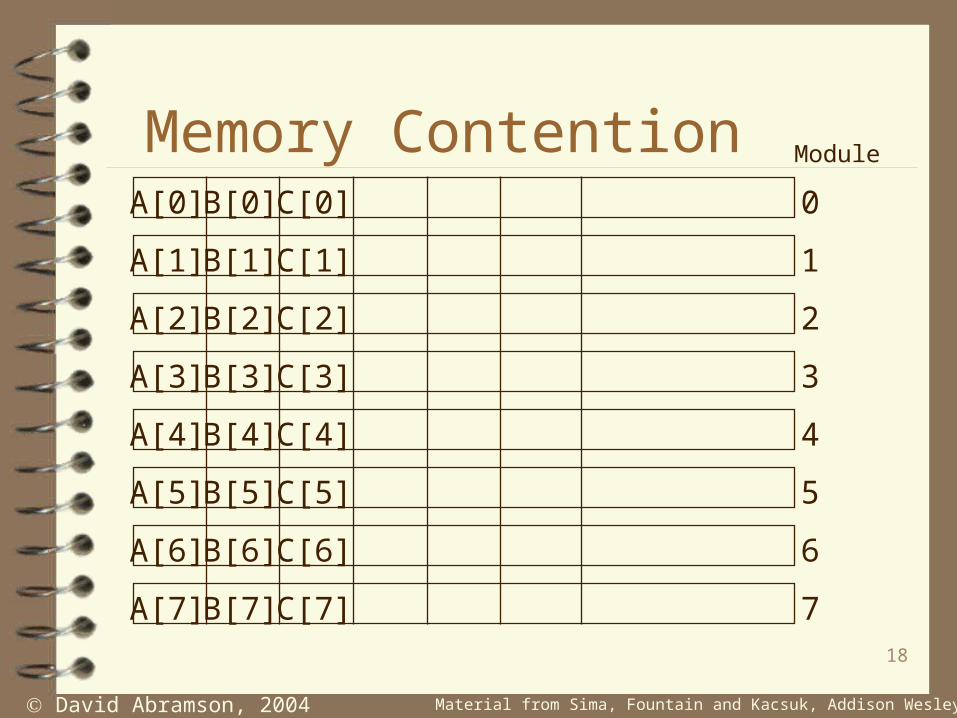
Memory ContentionA[0]
A[1]
A[2]
A[3]
A[4]
A[5]
A[6]
A[7]
B[0]
B[1]
B[2]
B[3]
B[4]
B[5]
B[6]
B[7]
C[0]
C[1]
C[2]
C[3]
C[4]
C[5]
C[6]
C[7]
0
1
2
3
4
5
6
7
Module
19
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
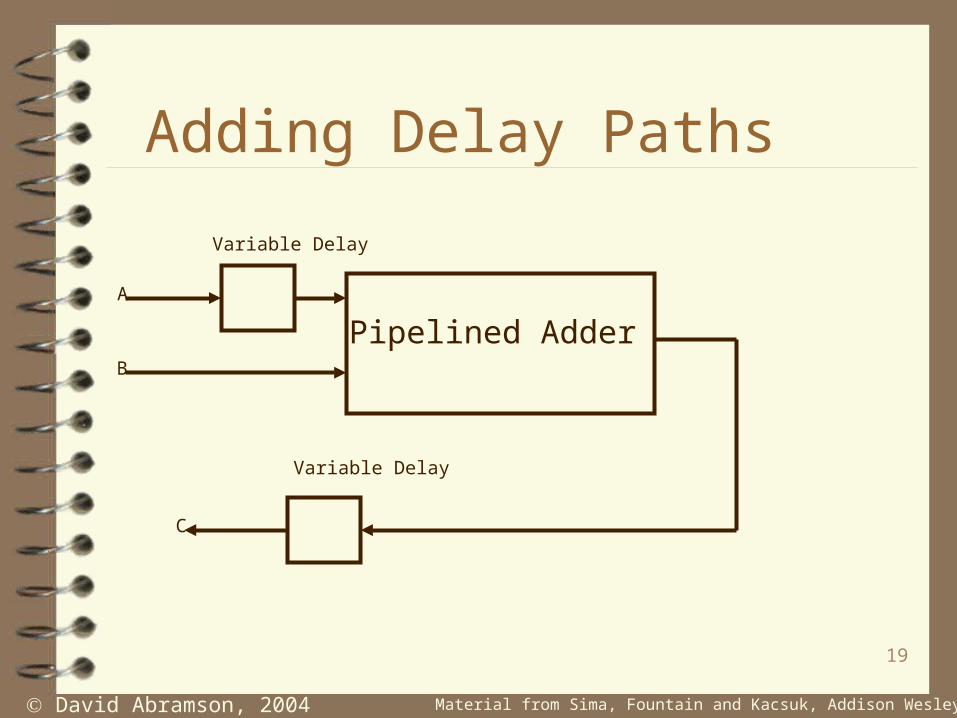
Adding Delay Paths
Pipelined Adder
Variable Delay
Variable Delay
A
B
C
20
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
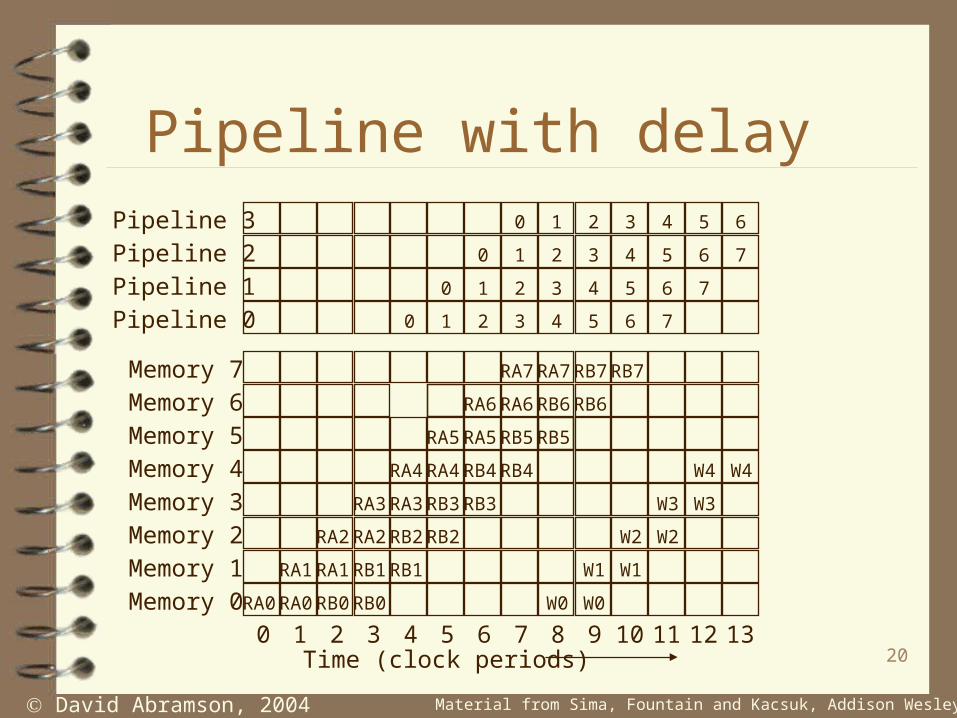
Pipeline with delay
Time (clock periods)0 1 2 3 4 5 6 7 8 9 10 11 12 13
Memory 0
Memory 1Memory 2Memory 3
Memory 4Memory 5
Memory 6Memory 7
Pipeline 0Pipeline 1
Pipeline 2Pipeline 3
RA0RA0
RA1RA1
RA2RA2
RA3RA3
RA4RA4
RA5RA5
RA6RA6
RA7RA7
RB0RB0
RB1RB1
RB2 RB2
RB3 RB3
RB4 RB4
RB5RB5
RB6 RB6
RB7 RB7
0 1 2 3 4 5 6 7
0 1 2 3 4 5 6 7
0 1 2 3 4 5 6 7
0 1 2 3 4 5 6
W0 W0
W1 W1
W2 W2
W3 W3
W4 W4
21
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
CRAY 1 Vector Operations
Vector facility The CRAY compilers are vectorising, and do not
require vector notation– do 10 i=1,64– 10 x(i) = y(i)
Scalar arithmetic – 64*n instructions, where n is the number of instructions per
loop iteration. Vector registers can also be sent to the floating point
functional units.
22
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
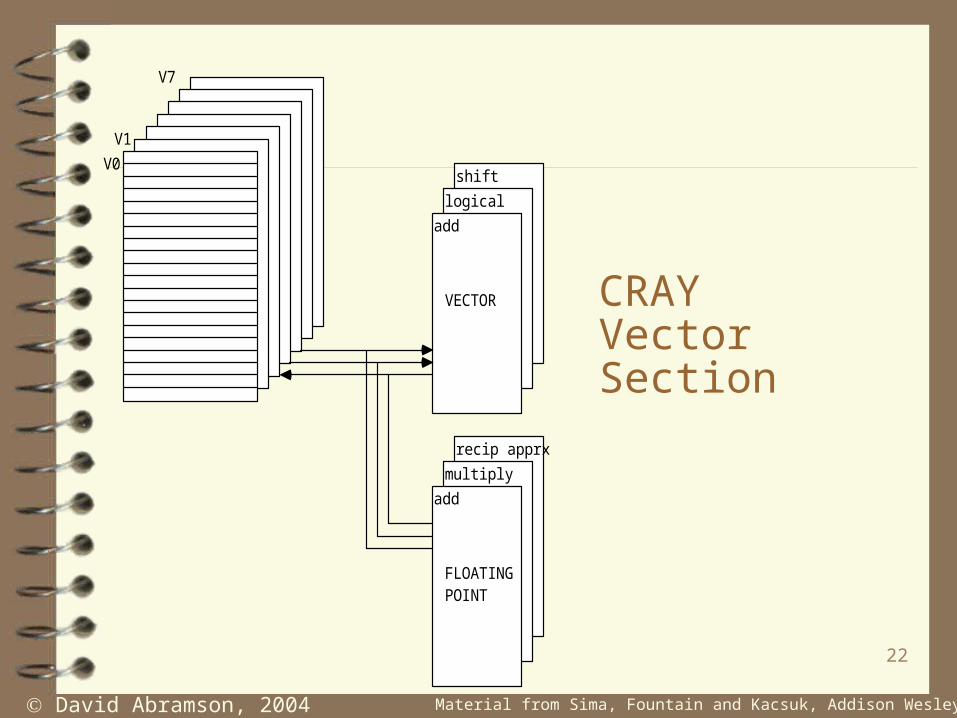
CRAY Vector Section
V0
V1
V7
VECTOR
add
logical
shift
FLOATING POINT
add
multiply
recip apprx
24
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Chaining
The CRAY-1 can achieve even faster vector operations by using chaining.
Result vector is not only sent to the destination vector register, but also directly to another functional unit.
Data is seen to chain from one functional unit to another possibly without any intermediate storage.
25
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Vector Startup Vector instructions may be issued at the rate of 1
instruction per clock period. – Providing there is no contention they will be issued at this rate.
The first result appears after some delay, and then each word of the vector will arrive at the rate of one word per clock period.
Vectors longer than 64 words are broken into 64 word chunks.– do 10 i = 1,n
– 10 A(i) = B(i)

26
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Vector Startup times
Note the second loop uses data chaining. Note the effect of startup time.
Loop Body 1 10 100 1000 Scalar 1000
A(i) = B(i) 44 5.8 2.7 2.5 31
A(i) = B(i)*C(i) + D(i)*E(i)
110 16 7.7 7.1 57

27
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Effect of Stride on Interleaving
Most interleaving schemes simply take the bottom bits of the address and use these to select the memory bank.
This is very good for sequential address patterns (stride 1), and not too bad for random address patterns.
But for stride n, where n is the number of memory banks, the performance can be extremely bad.
DO 10 I = 1,128 DO 20 J = 1,12810 A(I,1) = 0 20 A(1,J) = 0
28
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Effect of Stride
These two code fragments will have quite different performance
If we assume the array is arranged in memory row by row,– first loop will access every 128'th word in sequential order,– second loop will access 128 contiguous words in sequential order
Thus, in loop 1 interleaving will fail if the number of memory banks is a factor of the stride.
A(1,1-128) A(2,1-128) A(3,1-128)
29
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Effect of Stride
Many research papers on how to improve the performance of stride m access on an n way interleaved memory system.
Two main approaches:– Arrange the data to match the stride (S/W)– Make the hardware insensitive to the stride
(H/W)
30
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Memory Layout for stride free access
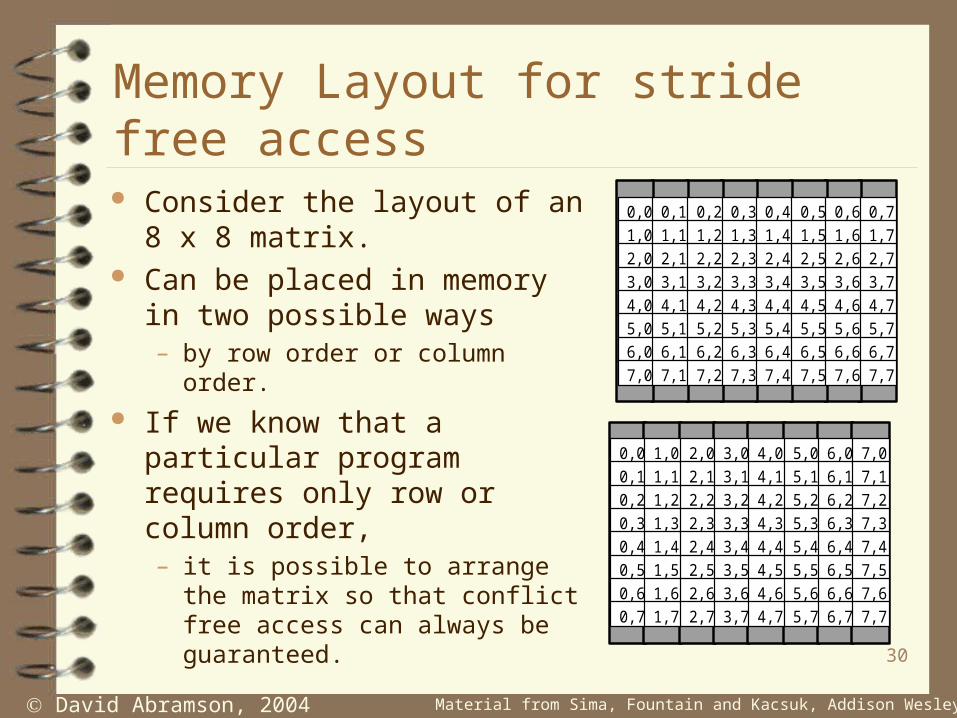
Consider the layout of an 8 x 8 matrix.
Can be placed in memory in two possible ways– by row order or column order.
If we know that a particular program requires only row or column order, – it is possible to arrange the matrix so
that conflict free access can always be guaranteed.
0,00,10,20,30,40,50,60,7
1,01,11,21,31,41,51,61,7
2,02,12,22,32,42,52,62,7
3,03,13,23,33,43,53,63,7
4,04,14,24,34,44,54,64,7
5,05,15,25,35,45,55,65,7
6,06,16,26,36,46,56,66,7
7,07,17,27,37,47,57,67,7
0,01,02,03,04,05,06,07,0
0,11,12,13,14,15,16,17,1
0,21,22,23,24,25,26,27,2
0,31,32,33,34,35,36,37,3
0,41,42,43,44,45,46,47,4
0,51,52,53,54,55,56,57,5
0,61,62,63,64,65,66,67,6
0,71,72,73,74,75,76,77,7
31
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
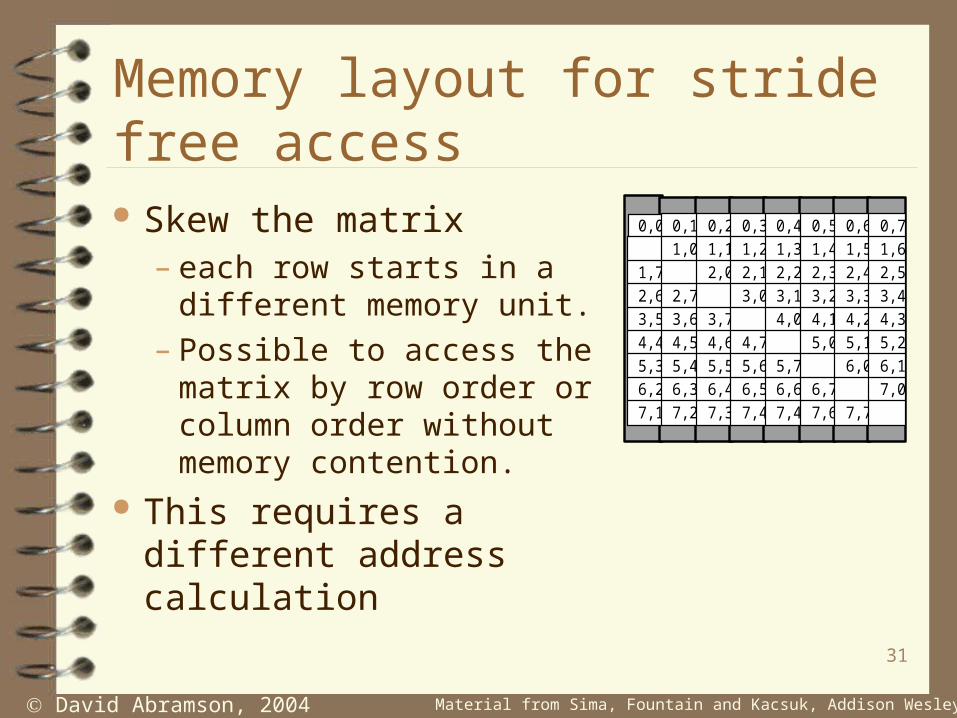
Memory layout for stride free access
Skew the matrix – each row starts in a different
memory unit. – Possible to access the matrix
by row order or column order without memory contention.
This requires a different address calculation
0,0
1,7
2,6
3,5
4,4
5,3
6,2
0,1
1,0
2,7
3,6
4,5
5,4
6,3
0,2
1,1
2,0
3,7
4,6
5,5
6,4
0,3
1,2
2,1
3,0
4,7
5,6
6,5
0,4
1,3
2,2
3,1
4,0
5,7
6,6
0,5
1,4
2,3
3,2
4,1
5,0
6,7
0,6
1,5
2,4
3,3
4,2
5,1
6,0
0,7
1,6
2,5
3,4
4,3
5,2
6,1
7,0
7,1 7,2 7,3 7,4 7,4 7,6 7,7

32
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Address Modification in Hardware
Possible to use a different function to compute the module number.
If the address is passed to an arbitrary address computation function which emits a module number, – Produce stride free access for many different strides
There are schemes which give optimal packing and do not waste any space
33
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Other Typical Access Patterns
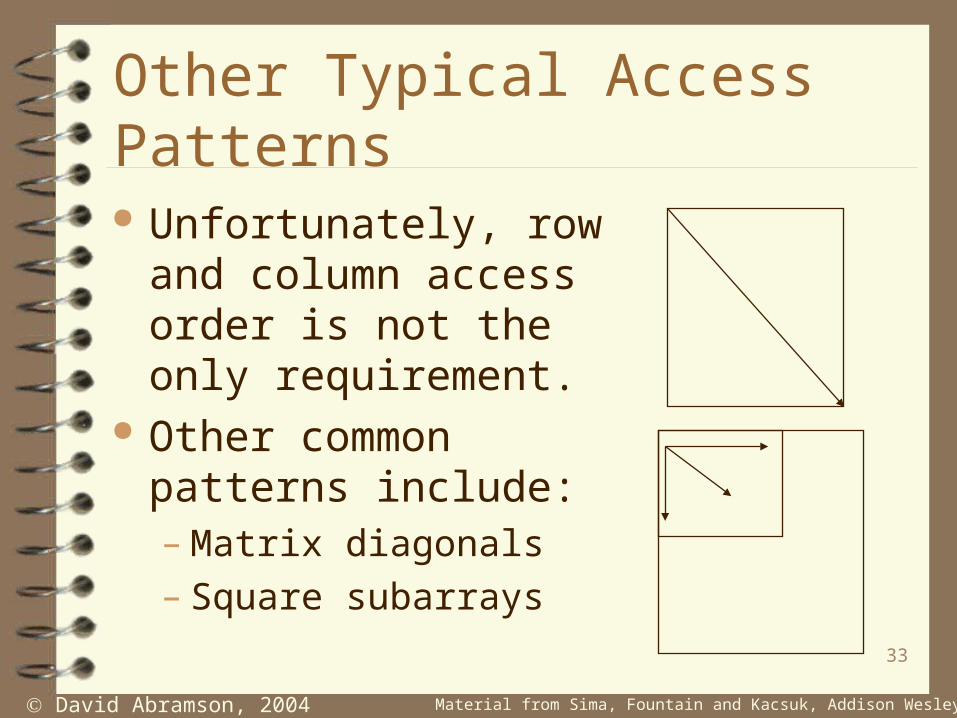
Unfortunately, row and column access order is not the only requirement.
Other common patterns include:– Matrix diagonals– Square subarrays
34
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Diagonal Access
To access diagonal, – stride is equal to column stride + 1
If M, the number of modules isequal to power of 2, – both column stride and column stride +1 cannot
both be efficient, – both cannot be relatively prime to M.
35
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Vector Algorithms
Consider the solution of the linear equations given by:– Ax = b
• A is an NxN matrix and
• x and b are N x 1 column vectors.
Gaussian Elimination is an efficient algorithm for producing upper and lower diagonal matrices L and U, such that– A = LU
36
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Gaussian Elimination
Given L and U it is possible to write:
Ly = b and Ux = y Using back substitution it is possible to
solve for x.
=L
0
y b
=0
U
x y
37
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
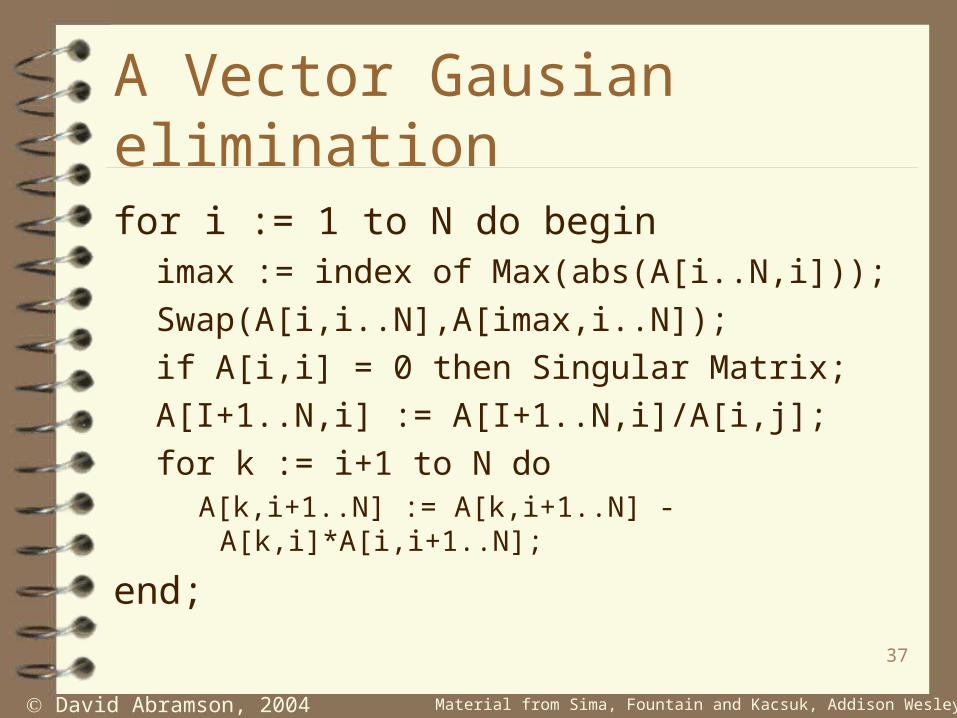
A Vector Gausian elimination
for i := 1 to N do beginimax := index of Max(abs(A[i..N,i]));
Swap(A[i,i..N],A[imax,i..N]);
if A[i,i] = 0 then Singular Matrix;
A[I+1..N,i] := A[I+1..N,i]/A[i,j];
for k := i+1 to N doA[k,i+1..N] := A[k,i+1..N] - A[k,i]*A[i,i+1..N];
end;

38
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Picture of algorithm
U
LP U'
L' A
The algorithm produces a new row of U and column of L each iteration
39
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Aspects of the algorithm
The algorithm as expressed accesses both rows and columns.
The majority of the vector operations have either two vector operands, or a scalar and a vector operand, and they produce a vector result.
The MAX operation on a vector returns the index of the maximum element, not the value of the maximum element.
The length of the vector items accessed decreases by 1 for each successive iteration.
40
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Comments on Aspects
Row and Column access should be equally efficient (see discussion on vector stride)
Vector pipeline should handle a scalar on one input
MIN, MAX and SUM operators required which accept one or more vectors and return scalar
Vectors may start large, but get smaller. This may affect code generation due to vector startup cost.
41
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Sparse Matrices
In many engineering computations, there may be very large matrices. – May also be sparsely occupied, – Contain many zero elements.
Problems with the normal method of storing the matrix:– Occupy far too much memory– Very slow to process
42
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Sparse Matrices ...
Consider the following example:
x
23 0 ...0 ...
43
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Sparse Matrices ...
Many packages solve the problem by using a software data representation.– The trick is not to store the elements which
have zero values. At least two sorts of access mechanism:
– Random– Row/Column sequential.

44
David Abramson, 2004 Material from Sima, Fountain and Kacsuk, Addison Wesley 1997
Sparse Matrices ...
Matrix multiplication then consists of moving down the row/column pointers and multiplying elements of they have the same index values.
Hardware to implement this type of data representation.
Row Pointers
Column Pointers