10.06.2004norsig 2004, espoo1 least squares optimization of 2-d iir filters bogdan dumitrescu...
TRANSCRIPT

10.06.2004 Norsig 2004, Espoo 1
Least Squares Optimization of2-D IIR Filters
Bogdan Dumitrescu
Tampere Int. Center for Signal Processing
Tampere University of Technology, Finland

10.06.2004 Norsig 2004, Espoo 2
Summary
2-D IIR filters: least-squares optimization problem 2-D convex stability domain Gauss-Newton algorithm Experimental results

10.06.2004 Norsig 2004, Espoo 3
2-D IIR filters
Transfer function
1
1
2
2
21
21
1
1
2
2
21
21
0 0 21,
0 0 21,
21
2121 ),(
),(),( n
k
n
k
kkkk
m
k
m
k
kkkk
zza
zzb
zzA
zzBzzH
Degrees m1, m2, n1, n2 are given Coefficients are optimized Denominator can be separable or not
2121 ,, , kkkk ab

10.06.2004 Norsig 2004, Espoo 4
Optimization criterion
Least-squares error with respect to a desired frequency response
2
1 1
)()(,
1
1
2
2
2211
21),(),(
L L jj eeHDBAJ
The error is computed on a grid of frequencies
10.06.2004 Norsig 2004, Espoo 5
Optimization difficulties
The set of stable IIR filters is not convex The optimization criterion is not convex
SOLUTIONS Iterative optimization Convex stability domain around current
denominator Gauss-Newton descent technique

10.06.2004 Norsig 2004, Espoo 6
convex domain around
current denominator
Iteration structure
)(iA
)1( iA
set of stable denominators
descent direction
)(iA - current denominator)1( iA - next denominator
)(iA
)(iD

10.06.2004 Norsig 2004, Espoo 7
2-D convex stability domain
Based on the positive realness condition
0),(
),(1Re
21
21
)(
)(
jji
jjiA
eeA
ee
Described by a linear matrix inequality (LMI) Using a parameterization of sum-of-squares
multivariable polynomials Pole radius bound possible

10.06.2004 Norsig 2004, Espoo 8
Gauss-Newton descent direction In each iteration, the descent direction is found by
a convexification of the criterion
(i)D
)()(
2
1 1
)()(,
)(,,
..
min 1
1
2
2 212121
iA
i
L L iiTi
Ats
HHD
This is a semidefinite programming (SDP) problem
)(
)(
iB
iA

10.06.2004 Norsig 2004, Espoo 9
Algorithm
1. Set
2. Set
3. Compute GN direction
4. Find optimal step by line search
5. Compute new filter
6. With i=i+1, repeat from 2 until convergence
1,1 )1( Ai
)( )()( iLS
i ABB )()( , iB
iA
),(min )()()()(10
* iB
iiA
i BAJ
)(*)()1()(*)()1( , iB
iiiA
ii BBAA

10.06.2004 Norsig 2004, Espoo 10
Design problems
Desired response: ideal lowpass filter with linear phase in passband
)(2121
2211),(),( jeDD
stopbandin
passbandin
,0
,1),( 21 D

10.06.2004 Norsig 2004, Espoo 11
Passband and stopband shapes
circular rhomboidal elliptic

10.06.2004 Norsig 2004, Espoo 12
Experiments details
Numerator degree: 12 Denominator degree: 2 to 10 Pole radius: 0.9
Implementation: Matlab + SeDuMi Execution time: 3-10 minutes on PC at 1GHz
10.06.2004 Norsig 2004, Espoo 13
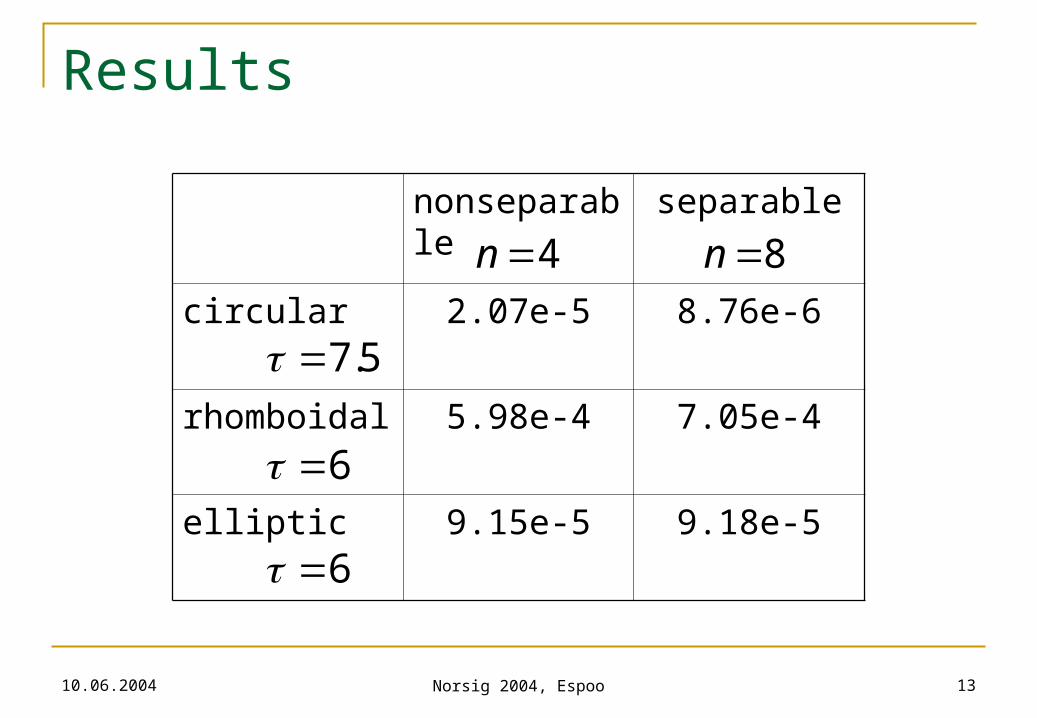
Results
nonseparable separable
circular 2.07e-5 8.76e-6
rhomboidal 5.98e-4 7.05e-4
elliptic 9.15e-5 9.18e-5
4n 8n
5.7
6
6

10.06.2004 Norsig 2004, Espoo 14
Example, magnitude

10.06.2004 Norsig 2004, Espoo 15
Example, group delay